-
Cours 8. Méthodes d’analyse des circuits
non-linéaires
Par Dimitri galayko
Unité d’enseignement Élec-infopour master ACSI à l’UPMC
Octobre-décembre 2005
1 Généralités : éléments avec et sans mémoire
La diode est un élément non-linéaire. En effet, en y
appliquant une sommede deux tensions on n’obtient pas une somme des
courants correspondant àchacune des tensions appliquée
séparément :
ID(UD1 + UD2) 6= ID(UD1) + ID(UD2). (1)
(Démontrez cette propriété.)Une diode est alors une dipôle
non-linéaire pour lequel on connâıt la
caractéristique tension-courant :
ID = f(UD), (2)
où UD et ID sont la tension et le courant de la diode.Dans
l’expression de la caractéristique « courant-tension »la tension
est
souvent prise comme l’argument ; ceci est dû à l’usage et au
fait qu’en pra-tique il est plus facile à générer et à imposer
une tension qu’un courant. Ils’agit plutôt d’une habitude, d’une
tradition, mais non pas d’une règle – descontre-exemples
existent.
Ainsi, on peut dire qu’une diode est un élément semblable à
une résistance,à cette différence près que pour une résistance
la fonction f(UR) est linéaire,alors que pour une diode elle est
exponentielle.
L’état d’une diode et d’une résistance à un instant t est
uniquementdéterminé par leurs tensions et courants à ce même
instant et ne dépend
1
-
2
pas des états du passé. Les éléments possédant cette
propriété s’appellent« éléments sans mémoire ».
Par opposition, les éléments réactifs, tels que les
capacités et les induc-tances, sont des éléments « avec mémoire
», car leur état instantané dépenddes états du passé. Par
exemple, pour connâıtre le courant du condensateur,il faut
connâıtre la dérivée de sa tension par rapport au temps, i.e.
l’évolutiondu courant entre le moment t et l’instant
immédiatement précédent t − δt.
Les relations entre les courants et les tensions des éléments
sans mémoiresont décrites par des équations algébriques, alors
que les relations entre lestensions et les courants des éléments
avec mémoire sont donnés par deséquations différentielles.
Si les équations décrivant les éléments sont linéaires, on
parle d’élémentslinéaires, comme les résistances, les
inductances et les condensateurs. Dansle cas contraire les
éléments sont non-linéaires, comme les diodes. Jusquelà nous
n’avons pas présenté un élément réactif non-linéaire ; tel
est, parexemple, un condensateur dont la charge dépend d’une
manière non-linéairede la tension :
qC = CU − C1U3. (3)
Ainsi, le courant dans un tel condensateur dépend d’une
manière non-linéaire de la tension et de sa première dérivée
:
iC = CdU
dt+ 3C1U
2dU
dt. (4)
Par conséquent, les circuits comportant des éléments
non-linéaires avecmémoire se décrivent par des équations
différentielles non-linéaires.
En électronique on a rarement affaire aux composants réactifs
non-linéaires ;la plupart des circuits non-linéaires utilisent
seulement des éléments non-linéaires sans mémoire (associés,
éventuellement, avec des éléments linéairesavec ou sans
mémoire).
Dans la plupart des cas il est nécessaire d’analyser les
circuits non-linéairesen régime de courant continu. On parle
alors d’une analyse en régime sta-tique. Il s’agit,
généralement, de résoudre un système d’équations
algébriquesnon-linéaires. Lorsque un circuit contenant des
éléments non-linéaires estsoumis à des sources de tension ou de
courant variables dans le temps, ils’agit d’un régime dynamique,
qui est décrit par des équations algébriquesou différentielles
non-linéaires.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
3
E=4 V
R=2 Ohms
Fig. 1 – Exemple de circuit comportant un élément
non-linéaire.
Il n’existe pas de méthode générale pour résoudre les
équations non-linéaires. D’ailleurs, dans la plupart des cas, la
solution ne peut pas êtreexprimée analytiquement.
De différentes approches sont employées pour analyser les
circuits non-linéaires. Dans les paragraphes suivant nous en
présentons quelques-unes lesplus importantes.
2 Régime statique
2.1 Méthode graphique
Il s’agit d’une méthode graphique de la résolution des
équations algébriquesnon-linéaires. Supposons que nous
souhaitions calculer le courant dans le cir-cuit de la figure 1,
qui inclut un élément non-linéaire avec une
caractéristiquecourant-tension I(U) donnée, une résistance et
une source de tension conti-nue, les trois dipôles étant
branchés en série.
Le courant se trouve à partir de la loi des mailles :
E = R · I(U) + U, (5)
où I et U sont le courant et la tension de l’élément
non-linéaire.Dans le cas général, cette équation n’a pas de
solution analytique.L’idée de la méthode graphique est de
représenter le circuit par deux
dipôles raccordés en parallèle et en série, comme c’est
montré figure 2.Ainsi, d’après la loi de nœuds et la loi des
mailles,
I1 = I2, U1 = U2. (6)
Notez que les sens conventionnels positifs des courants et des
tensions sontdéfinis différemment pour les deux dipôles : pour
la résistance et la sourcela convention est générateur, pour le
dipôle non-linéaire la convention est
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
4
E=4 V
R=2 Ohms
I2I1
U1 U2
Fig. 2 – Circuit non-linéaire représenté par deux dipôles
raccordés en sérieet en parallèle.
récepteur1. Ainsi, d’après la loi des nœuds, les courants I1
et I2 doivent êtreégaux, alors que si les conventions étaient
identiques pour les deux dipôles,ils seraient opposés ce qui
compliquerait légèrement le calcul qui va suivre.
Par défaut, la caractéristique courant-tension est
définiepour une convention récepteur, i.e. la même que pour
unerésistance, cf. la définition du sens conventionnel positifde
I2 et U2 à la figure 2.
Soit la caractéristique tension-courant du dipôle donnée par
un graphiquede la figure 3.
Cette caractéristique définit le rapport entre le courant I2
et la tensionU2 du circuit de la figure 2. Il faut alors
représenter la caractéristique entreI1 et U1 dans les mêmes axes
et ensuite trouver les coordonnées du pointd’intersection des deux
caractéristiques.
Pour un dipôle composé d’une source de tension et une
résistance rac-cordées en série, la caractéristique
courant-tension est affine, et en respectantla convention pour U1
et I1 définie figure 2 nous avons :
I1 =E
R− U1 ·
1
R. (7)
En utilisant les valeurs de R et de E, nous avons :
I1 = 2 − 0.5U1, (8)
1Rappelons, que lorsque la tension et le courant définis selon
la convention générateursont positifs, le dipôle produit une
énergie électrique i.e. la puissance dissipée est
négative,alors qu’en cas de la convention récepteur, l’élément
consomme de l’énergie électrique, i.e.la puissance dissipée est
positive.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
5
1 A
U
I
1 V
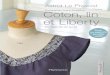
Fig. 3 – Caractéristique courant-tension de l’élément
non-linéaire utilisé dansla présentation des méthodes d’analyse
des circuits non-linéaires.
où la U1 est exprimée en volts, I1 en ampères.On trace I1(U1)
et I2(U2) dans les mêmes axes (figure 4).On voit que les deux
caractéristiques ont une intersection à I = −0.7A,
U = 5.4V . C’est donc la tension et le courant de l’élément
non-linéaire de lafigure 1.
Le caractère visuel de la méthode graphique permet d’analyser
le circuitqualitativement et de comprendre ce qui se passe si l’on
fait varier un des pa-ramètres du circuit. Par exemple, ici il est
évident que pour certaines valeursde la tension E et de la
résistance R, on peut avoir deux ou trois intersec-tions : cela
veut dire que le circuit peut se trouver dans un des plusieurs
états.Différents facteurs peuvent influencer l’état définitif
du circuit : la stabilité(tous les états ne sont pas stables),
les conditions initiales etc... L’étude deces aspects dépasse le
cadre de notre module, car dans la plupart des cas quel’on
rencontre en pratique, l’état du circuit est défini d’une
manière unique.
Notez que dans les circuits linéaires les tensions et les
courants sont tou-jours définis d’une manière unique, car leurs
caractéristiques courant-tensionsont toujours des droites entre
lesquelles, sauf cas dégénérés, il existe une
seuleintersection.
2.2 Approximation par un dipôle à caractéristique
courant-
tension linéaire par morceaux
Afin d’analyser le comportement des circuits incluant les
éléments non-linéaires, on représente un élément
non-linéaire par un modèle linéaire ap-
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
6
U
I
1 V
1 A I
U
Fig. 4 – Illustration de la méthode graphique d’analyse des
circuits non-linéaires.
proximé. Cette substitution conduit plus ou moins à une
dégradation de laprécision des calculs, mais permet d’avoir une
idée sur le fonctionnement ducircuit et de faire des estimations
approximatives des grandeurs du circuit.
Très souvent sur la caractéristique courant-tension il est
possible de dis-tinguer des zones dans lesquelles l’élément peut
être apparenté à un élémentlinéaire. On parle des zones ou
des régimes de fonctionnement. Ainsi, danschaque régime un
élément non-linéaire est décrit par une équation linéaire
quidéfinit un élément électrique linéaire. Dans le cas des
éléments sans mémoirece sont les sources réelles de tension ou
de courant2.
Prenons l’exemple de l’élément dont la caractéristique
courant-tension estdonnée figure 3.
On distingue trois régimes de fonctionnement correspondant aux
plagesde tension suivantes : (−∞, U1), (U1, U2) et (U2, +∞) (figure
5). Ainsi, sur cesintervalles, on peut approximer la
caractéristique par des droites (la figure 5,le graphique en ligne
épaisse).
Chaque droite décrit une source réelle de tension ou de
courant continu.La pente de la droite donne la valeur inverse de la
résistance interne dela source. La coordonnée de son intersection
avec l’axe des tensions ou descourants donne la tension nominale ou
le courant nominal de la source (selonle type de la source). Notez,
que même si sur l’intervalle où le modèle estvalable la droite
ne croise par l’axe des tensions ou des courants, on cherchele
point d’intersection en extrapolant la droite en dehors de
l’intervalle de sa
2Démontrez que la caractéristique courant-tension d’un dipôle
composé d’une sourcede tension en série avec une résistance est
une droite.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
7
U
I
1 V
1 A
U2
R2R3
R1
E2 E3E1
U1
Fig. 5 – Caractéristique courant-tension de l’élément
non-linéaire approchéepar une fonction continue linéaire par
morceaux.
validité.Ainsi, l’élément décrit par la courbe de la figure
5 peut être modélisé par
une source de tension réelle, dont les paramètres dépendent
de la zone defonctionnement. La caractéristique courant-tension
approximée est donnéepar :
I(U) =
U/R1 − E1/R1, U < U1,U/R2 − E2/R2, U1 < U < U2,U/R3 −
E3/R3, U > U2
, (9)
où U et I sont la tension et le courant associés à
l’élément non-linéaire.Notez, que d’après le graphique de la
fonction approximée (figure 5) dans
l’intervalle (U1, U2) la résistance interne de la source
équivalente est négative.Pour montrer un exemple d’analyse,
trouvons le courant et la tension
de l’élément non-linéaire du circuit de la figure 1. D’après
le graphique de lafigure 1, l’approximation linéaire par morceaux
de la caractéristique courant-tension I(V ) est donnée par
l’expression :
I(U) =
U/0.5 + 2/0.5, U < −2,U/(−1) − 1/(−1), −2 < U < 3,
U/2 − 7/2, U > 3. (10)
Pour trouver la tension et le courant de l’élément
non-linéaire, il fautsavoir dans quel régime, i.e. dans quelle
zone, il fonctionne : connaissantcela, dans (5) on substitue I(U)
par une fonction linéaire et la solution de
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
8
E=2 V
R=2 Ohms
I
Ri
Élément non-linéaire
U
Ei
Fig. 6 – Modélisation de l’élément non-linéaire par une
source de tensionréelle.
l’équation devient triviale. Or précisément, on ne sait pas
quelle est la zonede fonctionnement ; c’est là la difficulté de
l’analyse des circuits non-linéaires.
Pour connâıtre la zone de fonctionnement sans utiliser des
méthodesnumériques, on avance des hypothèses. On va supposer,
par exemple, quela tension sur l’élément non-linéaire se trouve
dans l’intervalle (U1, U2). Nousremplaçons l’élément par son
modèle qui est linéaire pour touts les tensionset les courants
(cf. la figure 6). Ce nouveau circuit est linéaire, or il
estéquivalent au circuit original uniquement lorsque la tension se
trouve dansl’intervalle (U1, U2).
En analysant le nouveau circuit de la figure 6, on trouve la
tension etle courant sur l’élément non-linéaire. Si ces
grandeurs correspondent à lazone pour laquelle le modèle est
valable, notre hypothèse est juste, dans le cascontraire, il faut
faire une autre hypothèse. Ainsi, au pire, à chaque hypothèseon
exclut une zone dans lequel l’élément non-linéaire ne peut pas
se trouver.
Appliquons cette méthode au circuit de la figure 1.Supposons
que le circuit se trouve dans la zone I (U < −1V ). Ainsi,
Ei = −2V , Ri = 0.5Ohm. Donc, le courant dans l’élément
non-linéaire vaut(E −Ei)/(Ri +R) = (4− (−2))/(2+0.5) = 2.4A, la
tension U = RiI +Ei =2.4 · 0.5 + (−2) = −0.8V . Manifestement,
l’hypothèse quant à la zone defonctionnement est fausse, car le
modèle avec Ei = −2V , Ri = 0.5Ohm n’estvalable que si U < −1V
.
Supposons maintenant que le circuit fonctionne en zone II, i.e.
−1V <U < 3V . Ainsi, Ei = 1V , Ri = −1Ohm. Ainsi, le courant
vaut (4 − 1)/(2 +(−1)) = 3A et la tension U = 3 · (−1)Ohms + 1 =
−2V . L’hypothèse estfausse car le modèle est valable si −1V <
0V < 3V .
En zone III Ei = 7V , Ri = 2Ohm. Ainsi, le courant vaut (4 −
7)/4 =−0.75A et la tension Ei = −0.75A · 2Ohms + 7 = 5.5V .
L’hypothèse estmanifestement juste.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
9
e(t) = E1cosωt
R
E0
Fig. 7 – Circuit contenant un élément non-linéaire
fonctionnant en régimedynamique.
Ainsi, I = −0.75A, U = 5.5V . Ceci est proche des valeurs
obtenues parla méthode graphique.
3 Régime dynamique
L’électronique s’intéresse au traitement du signal. Par
conséquent, pra-tiquement tous les systèmes de l’électronique
sont conçus pour fonctionneren régime dynamique, i.e. lorsque les
variables d’entrée et de sortie évoluentdans le temps.
L’exemple le plus simple (mais néanmoins suffisamment
général) d’un cir-cuit non-linéaire fonctionnant en régime
dynamique est donné à la figure 7.Ce circuit inclut une source de
tension continue, une source de tension al-ternative, une
résistance et un élément non-linéaire, tous les quatre
étantraccordés en série. La tension totale appliquée au circuit
contient une com-posante continue et une composante variable dans
le temps (alternative) ;on représente cette tension comme la somme
des tensions générées par deuxsources raccordées en série
:
Usource(t) = E0 + e(t) = E0 + E1 cos(ωt). (11)
Ici la forme d’onde de la composante alternative est
sinusöıdale, mais enpratique cela peut être n’importe quelle
fonction.
On souhaite déterminer l’allure du courant dans l’élément
non-linéaire.On distingue deux régimes de fonctionnement
dynamique des circuits
non-linéaires : régime de grand signal et régime de petit
signal.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
10
e(t) = E1cosωt
id(t)R
E0
ud(t)
Fig. 8 – Circuit utilisant une diode en régime dynamique.
3.1 Régime grand signal
C’est le cas le plus général : l’amplitude de la composante
variable est tel-lement grande que durant une période, l’élément
non-linéaire se trouve, d’unemanière consécutive, en différents
régimes. Une étude analytique du circuitest impossible dans la
plupart des cas ; il faut considérer la
caractéristiquecourant-tension dans son intégralité et utiliser
des méthodes numériques.Prenons l’exemple d’une diode branchée
selon le schéma de la figure 8, avecE0 = −1V , f = 1Hz, E1 = 2V ,
R = 10Ω. Le système est alors décritpar l’équation (5) dans
laquelle la tension constante E est remplacée par latension
variable définie par (11) :
E0 + e(t) = E0 + E1 cos(ωt) = R · iD(uD(t)) + uD(t), (12)
En résolvant l’équation (12) par une méthode numérique pour
chaquet nous obtenons pour le courant et la tension de la diode les
graphiquesprésentés figure 9. Nous les avons tracés dans les
axes de la caractéristiquecourant-tension de la diode.
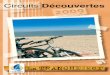
La forme d’onde de la tension et du courant de la diode est
complexe ;les lois d’évolution de ces grandeurs ne peuvent pas
être exprimées par unefonction analytique. En revanche, on
remarque que la diode peut être décritpar une caractéristique
courant-tension linéaire par morceaux. Elle a en effetdeux zones
quasi linéaires, I et II, comme indiqué figure (9). On voit que
dansla zone I la diode se comporte comme un circuit ouvert : la
tension sur ladiode est égale à la tension de la source, le
courant est défini par la résistanceest nul. En revanche, dans la
zone II la diode se comporte comme une source
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
11
Zone II
-0.5
0
0.5
1
1.5
2
2.5
3
-1 -0.5 0 0.5 1
A
temps, s
-0.5
0
0.5
1
1.5
2
2.5
3
-5 -4 -3 -2 -1 0 1 2
A
Tension, V
Caracteristique tension-courant d une diode
-5 -4 -3 -2 -1 0 1 2-1-0.5
0 0.5
1
V
temps, sTension de la diode en fonction du temps
Zone I
Courant de la diode en fonction du temps
Fig. 9 – Évolutions temporelles du courant et de la tension sur
la diode enrégime grand signal.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
12
de tension générant une tension constante VD = 0.7V : le
courant dans ladiode est alors défini par la résistance et vaut
:
iD(t) =E0 + e(t) − VD
R. (13)
Pour obtenir ces courbes, on aurait pu utiliser la méthode
présentée dansle paragraphe 2.2, seulement, il aurait fallu
l’appliquer pour chaque instantt, car la tension du circuit change.
Toutefois, pour les circuits plus com-plexes, avec des
caractéristiques non-linéaires se prêtant moins bien à
unelinéarisation, seules les méthodes numériques donne les lois
d’évolution destensions et des courants en régime de grand
signal.
Le régime de grand signal est très fréquemment utilisé, en
particulier dansl’électronique numérique et dans l’électronique
de puissance. La fonction detransfert d’une porte logique (la
tension de sortie en fonction de la tensiond’entrée) est un
exemple typique d’une fonction de transfert fortement
non-linéaire. Cette fonction de transfert manifeste deux zones
linéaires (figure 10).Dans chacune des zones, la porte peut être
représentée comme une source detension continue – nulle ou Udd –
tant que la tension d’entrée reste entre 0 etUth ou entre Uth et
Udd. En revanche, la forme d’onde de la tension de sortiedevient
très complexe si, lors de son évolution temporelle, la tension
d’entréetraverse le seuil.
3.2 Régime de petit signal
Un circuit fonctionne en régime de petit signal si sont
vérifiées les condi-tions suivantes :
1. Les éléments non-linéaires ne changent pas de zone de
fonctionnement.Cette condition impose une limite à la plage de
variation de la grandeurd’entrée, car celle-ci doit permettre aux
éléments de rester à l’intérieurd’une zone. Ainsi, s’il s’agit
de la diode, elle doit être soit passante, soitbloquée pour tout
t.
2. Le tronçon de caractéristique courant-tension correspondant
à l’inter-valle de fonctionnement diffère peu d’une droite, i.e.
présente une faiblenon-linéarité.
Reprenons l’exemple du circuit contenant une diode (figure 8).
Soit E0 =3V , E1 = 1V , R = 10Ω.
Sous ces conditions la tension sur la diode évolue entre 0.720
V et 0.745V, le courant évolue entre 0.12 A et 0.32 A. La zone
dans laquelle fonctionnela diode est donc limitée par ces deux
points ; comme l’on voit d’après la
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
13
Zone I
Zone IIUin
Uout
UddUth
Udd
Uin Uout
temps
Uout
temps
Uin
Niveau Uth
Fig. 10 – Fonction de transfert statique d’une porte
logique.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
14
0
0.5
1
1.5
2
2.5
3
0.4 0.5 0.6 0.7 0.8 0.9 1
A
Tension, V
Caracteristique tension-courant d une diode
0.4 0.5 0.6 0.7 0.8 0.9 1-1-0.5
0 0.5
1
V
temps, s
0
0.5
1
1.5
2
2.5
3
-1 -0.5 0 0.5 1
A
temps, s
Courant de la diode en fonction du temps
Tension de la diode en fonction du temps
Carac
térist
ique l
inéair
e équ
ivalen
te2
1
Fig. 11 – Tension et courant d’une diode fonctionnant en régime
de petitsignal.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
15
figure 11, entre les points 1 et 2 la caractéristique est
proche de la droitemontrée en pointillé. Ainsi, pour analyser le
circuit, on peut approximer lacaractéristique courant-tension de
la diode par cette droite. Comme on l’adéjà vu, une droite
définit une source de tension ou de courant réelle. Cettesource
de tension ou de courant s’appelle « modèle linéaire »ou «
linéarisé »dela diode.
On voit que plus l’amplitude de la composante alternative du
signal estpetite, plus l’approximation par une droite correspond à
la réalité. Un modèlelinéaire est parfaitement précis si
l’amplitude de la composante variable estinfiniment petite. En
pratique, l’amplitude de la composante variable doit êtreassez
petite, de sorte à ce que l’erreur induite soit tolérable.
L’appréciationde ce qui est tolérable est bien sûr subjectif ;
tout dépend de la précision del’analyse requise par le
contexte.
D’après la figure 11 on voit que si l’amplitude du signal est
faible, lerapport entre le courant et la tension est linéaire. On
le constate car lesformes d’onde de la tension et du courant sont
les mêmes – sinusöıdalessuperposées à une constante, i.e. il
n’y a pas de distorsion de la forme d’ondede la tension d’entrée
(e(t) + E0). Autrement dit, en régime de petit signalun élément
non-linéaire effectue un traitement quasi linéaire. On peut
seposer la question : pourquoi utiliser un élément non-linéaire
pour effectuerun traitement linéaire ?
Pour y répondre, étudions l’influence des sources de tension
E0 et E1 cos ωtsur le régime de fonctionnement du circuit. Il est
évident, que si E1 → 0, lerégime de fonctionnement ne change pas
; le modèle linéaire équivalent restele même. Il en va de même
si E1 augmente : la plage de variation de latension et du courant
sur la diode s’élargit, mais ceci se traduit juste parun
écartement des points 1 et 2 limitant la zone de fonctionnement ;
les pa-ramètres du modèle restent à peu près les mêmes.
En revanche, si l’on modifie la tension continue E0, la zone de
fonction-nement se déplace le long de la caractéristique
courant-tension ; la droiteapproximant la caractéristique change
ses paramètres en imposant un nou-veau modèle linéaire. Par
exemple, si E0 = 15V , la zone de fonctionnementse déplace vers la
droite (figure 12). On voit que la droite approximant letronçon de
la caractéristique courant-tension n’est plus la même, ainsi,
ladiode est équivalente à une source réelle (de tension ou de
courant) différentede celle du circuit de la figure 12.
Si l’on diminue la tension E0, on fait déplacer la zone de
fonctionnementvers la gauche, et si cette tension est négative, on
peut positionner la zonede fonctionnement vers le domaine de la
caractéristique correspondant à ladiode bloquée. Dans ce cas la
diode sera équivalente à un circuit ouvert –source de tension
avec une tension nulle et une résistance série infinie.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
16
0.4 0.5 0.6 0.7 0.8 0.9 1-1-0.5
0 0.5
1
V
temps, s
0
0.5
1
1.5
2
2.5
3
0.4 0.5 0.6 0.7 0.8 0.9 1
A
Tension, V
Caracteristique tension-courant d une diode
0
0.5
1
1.5
2
2.5
3
-1 -0.5 0 0.5 1
Atemps, s
Courant de la diode en fonction du temps
Tension de la diode en fonction du temps
12
Fig. 12 – Régime de fonctionnement de la diode pour E0 = 15V ,
E1 = 1V .
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
17
Ed
id(t)R
E0
e(t) = E1cosωt
ud(t)
Rd
Fig. 13 – Modèle linéaire d’une diode.
Ainsi, la tension constante E0 contrôle le régime dans lequel
fonctionne ladiode, et donc contrôle des paramètres de son
modèle linéaire. Les élémentsnon-linéaires offrent donc une
fonctionnalité extrêmement puissante : uncontrôle électrique,
i.e. par une tension ou par un courant, des paramètresdu circuit
linéaire équivalent.
L’avantage devient plus évident si l’on considère que le
circuit de la fi-gure 8 traite, d’un certaine manière, le signal
e(t), et si, dans la tension oudans le courant de sortie, l’on ne
s’intéresse qu’à la réponse à ce signal, i.e.uniquement au
signal de sortie.
Redessinons le circuit de la figure 8 en utilisant le modèle
linéaire de ladiode (figure 13).
C’est un circuit linéaire, ainsi, le principe de superposition
y est alorsappliquable. Par conséquent, tous les tensions et les
courants du circuits sontdes sommes des contributions des sources
de tension continue E0, Ed et dela source sinusöıdale e(t). Ainsi,
les tensions et les courants ont la forme :
η(t) = Ξ + ξ cos ωt, (14)
où Ξ et ξ sont la composante continue et l’amplitude de la
composante si-nusöıdale de la grandeur considérée (nommée η).
On dit que Ξ est la com-posante statique de la grandeur η, alors
que ξ cos ωt est sa composante petitsignal.
D’après le principe de superposition, la composante continue Ξ0
dépenddes sources continues E0 et Ed, alors que la composante
alternative dépendde la source de tension e(t).
Ainsi, si l’on s’intéresse uniquement à la composante
alternative de lagrandeur de sortie, i.e. au signal de sortie, on
peut annuler les sources conti-
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
18
u∼d (t)
i∼d (t)R
e(t) = E1cosωtRd
Fig. 14 – Schéma équivalent petit signal du circuit de la
figure 14.
nues et ne considérer que les éléments ayant une contribution
dans cette com-posante (figure 14). En éteignant toutes les
sources continues indépendanteson obtient ce que l’on appelle «
schéma équivalent petit signal »(figure 14)du circuit de la
figure 8. La résistance Rd est alors le modèle petit signal dela
diode.
La résistance Rd est un paramètre de modèle et dépend de la
tensioncontinue E0 que appliquée à l’entrée. Ainsi, cette
tension contrôle directe-ment une résistance du schéma
équivalent petit signal : donc, il est possibled’effectuer une
multitude de traitements avec le même circuit en faisant
justevarier E0.
3.3 Analyse d’un circuit non-linéaire en régime de pe-
tit signal
Dans le paragraphe précédent nous avons présenté l’idée et
l’intérêt de lamodélisation petit signal d’un élément
non-linéaire. Ici, nous présentons lesdémarches à suivre pour
analyser un circuit non-linéaire en régime de petitsignal.
Tout d’abord introduisons quelques définitions.Dans un circuit
non-linéaire modélisé par son schéma linéaire équivalent
(comme celui de la figure 13) et soumis à une tension ou un
courant de type(11), les tensions et les courants évoluent selon
la loi donnée par l’équation(14). D’après le principe de
superposition, le régime sinusöıdal ne dépendpas du régime
courant continu ; ainsi, pour l’analyse du régime
sinusöıdal(harmonique) il convient d’utiliser la méthode des
amplitudes complexes.
Ainsi, toute grandeur du circuit est caractérisée par sa
composante conti-nue désignée par une lettre majuscule (par
exemple, I1) et par l’amplitudecomplexe de la composante harmonique
désignée par une lettre minuscule
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
19
(par exemple, i1). D’habitude on ne met pas un point au-dessus
du symbole,comme l’on a fait en introduisant la méthode des
amplitudes complexes. Dansla littérature anglo-saxonne la
composante continue s’appelle DC component,comme direct current, et
la composante alternative AC component, commealternative
current.
Les valeurs DC (i.e. la composante continue) de la tension et du
courantde l’élément non-linéaire s’appellent « point de
fonctionnement », car ellesdéfinissent le point sur la
caractéristique courant-tension qui est au centre dela zone dans
laquelle fonctionne l’élément et, puisque idéalement les
variationsdes tensions et des courants du circuit sont faibles,
l’état de l’élément non-linéaire s’écarte peu de ce point.
Pour désigner le point de fonctionnement onemploie les termes «
point de polarisation », « point de repos », « tension/uncourant de
polarisation/de repos »et, en littérature anglo-saxonne, «
biaspoint », « operating point »et « bias voltage/bias current
».
Définissons maintenant les paramètres du modèle équivalent
petit signald’un élément non-linéaire. Considérons les
graphiques de la figure 11. Commenous l’avons dit, le modèle
devient parfaitement précis si l’amplitude de lacomposante
alternative de la tension (ou de courant) tend vers zéro. Ainsi,la
droite tend vers la tangente au point de fonctionnement (U0, I0),
où U0 etI0 sont les composantes continues du courant et de la
tension de l’élémentnon-linéaire. Sur cette droite nous
connaissons les coordonnées d’un point
(U0, I0) et la pentedI(U)
dU
∣
∣
∣
∣
∣
U=U0
, ainsi son équation est donnée par :
I(U) − I0U − U0
=dI(U)
dU
∣
∣
∣
∣
∣
U=U0
, (15)
ou autrement,
I(U) =dI(U)
dU
∣
∣
∣
∣
∣
U=U0
· U −dI(U)
dU
∣
∣
∣
∣
∣
U=U0
· U0 + I0. (16)
On sait que cette droite modélise une source réelle contenant
une résistanceinterne égale à l’inverse de la pente de la droite
et une source de tension conti-nue 3. Or, cette dernière source ne
contribue pas aux composantes petit signaldes grandeurs du circuit,
ainsi, lors de l’analyse petit signal on l’éteint.
le modèle équivalent petit signal d’un dipôle
non-linéaireest une résistance égale à l’inverse de la pente de
la ca-ractéristique courant-tension au point de
fonctionnement.
3Donnez la valeur de la tension de cette source à partir de
l’équation (16).
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
20
Cette résistance, calculée selon la formule
r =
(
dI(U)
dU
∣
∣
∣
∣
∣
U=U0
)
−1
=dU(I)
dI
∣
∣
∣
∣
∣
I=I0
, (17)
s’appelle résistance dynamique de l’élément non-linéaire au
point (U0, I0).Cette résistance montre le rapport entre les
faibles variations de la tensionet du courant sur un dipôle
non-linéaire. C’est un paramètre qui montrecomment l’élément
non-linéaire réagit à un signal, i.e. à une tension ou à
uncourant variable.
Ainsi, on peut construire le modèle petit signal d’un dipôle
non-linéairesi l’on connâıt le point de fonctionnement. Le point
de fonctionnement estdéfini par les sources continues
indépendantes faisant partie du circuit. Pourle circuit de la
figure 8, c’est la source E0.
Pour trouver le point de fonctionnement, i.e. les com-posantes
continues des tensions et des courants deséléments non-linéaires
fonctionnant en régime de petitsignal, on éteint toutes les
sources alternatives et oncherche l’état des éléments
non-linéaires en régime decourant continu. Pour cela on emploie
n’importe quelleméthode d’analyse de circuits non-linéaires de
courantcontinu, par exemple, celle d’approximation linéaire
parmorceaux ou une méthode numérique.
Donc, il est très important de comprendre, que pour pouvoir
modéliserun circuit non-linéaire en régime de petit signal, il
faut connâıtre son pointde polarisation. Le plus souvent, cela
nécessite un emploi des méthodesnumériques, bien que dans
certains cas (que nous allons étudier plus tard)un peu de bon sens
suffit pour calculer le point de polarisation « à la main ».
3.4 Paramètres petit signal d’une diode passante
Soit (UD, ID) le point de fonctionnement d’une diode. Calculons
sa résistancedynamique.
rD =
(
dID(UD)
dUD
)
−1
=(
q
kTIS(e
q
kTUD)
)
−1
, (18)
Si la diode est passante, eq
kTUD � 1, ainsi
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1
-
21
ID ≈ ISeq
kTUD . (19)
Donc, la résistance dynamique d’une diode passante vaut :
rD =
(
dID(UD)
dUD
)
−1
=(
q
kTIS(e
q
kTUD)
)
−1
=1
ID
kT
q, (20)
Calculons la résistance dynamique de la diode dans le schéma
de la fi-gure 8, si E0 = 10V et R = 1kΩ. Manifestement, la diode
est passante (onpeut le vérifier en faisant des hypothèses quant
à la zone de fonctionnement).On sait que lorsque la diode est
passante, la tension UD diffère peu de 0.7 V.Ainsi, on peut
supposer que UD ≈ 0.7V , donc la tension de la résistance
estégale à UR = E0 − UD ≈ 9.3V . Par conséquent, le courant du
circuit (doncdans la diode) vaut ID = UR/R ≈ 9.3/1000 = 9.3mA.
Ainsi, la résistancedynamique de la diode est donnée par :
rD =1
9.3 · 10−31.38 · 10−23 · 300
1.6 · 10−19= 2.78Ω. (21)
Une méthode numérique donne pour le point de fonctionnement ID
=9.34mA et UD = 0.653V , la résistance dynamique de la diode vaut
2.767Ohms.
Ainsi, l’hypothèse que la tension de la diode en état passant
est constantefacilite le calcul du point de fonctionnement et donne
des résultats très précis.
Dimitri galayko UPMC, Master ACSI UE Élec-info, M1