Embed Size (px)
Citation preview
Séance 3 :
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 73
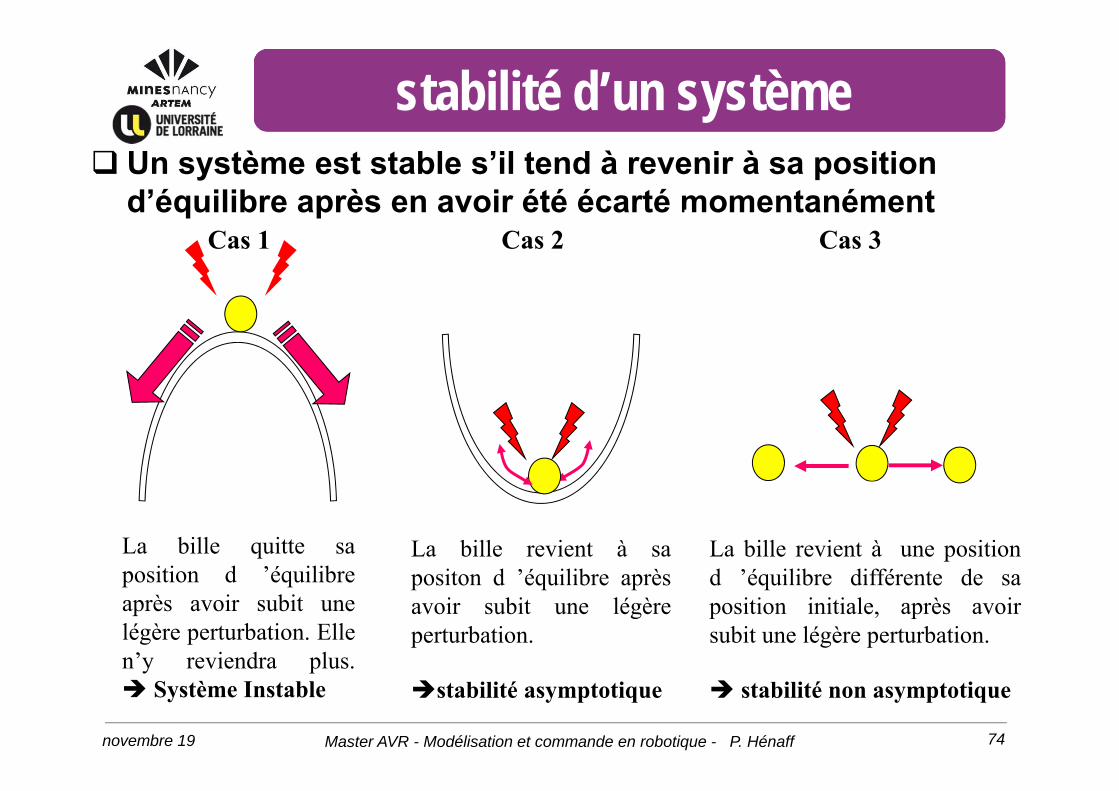
stabilité d’un système Un système est stable s’il tend à revenir à sa position
d’équilibre après en avoir été écarté momentanément
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 74
La bille quitte saposition d ’équilibreaprès avoir subit unelégère perturbation. Ellen’y reviendra plus. Système Instable
La bille revient à sapositon d ’équilibre aprèsavoir subit une légèreperturbation.
stabilité asymptotique
La bille revient à une positiond ’équilibre différente de saposition initiale, après avoirsubit une légère perturbation.
stabilité non asymptotique
Cas 2Cas 1 Cas 3
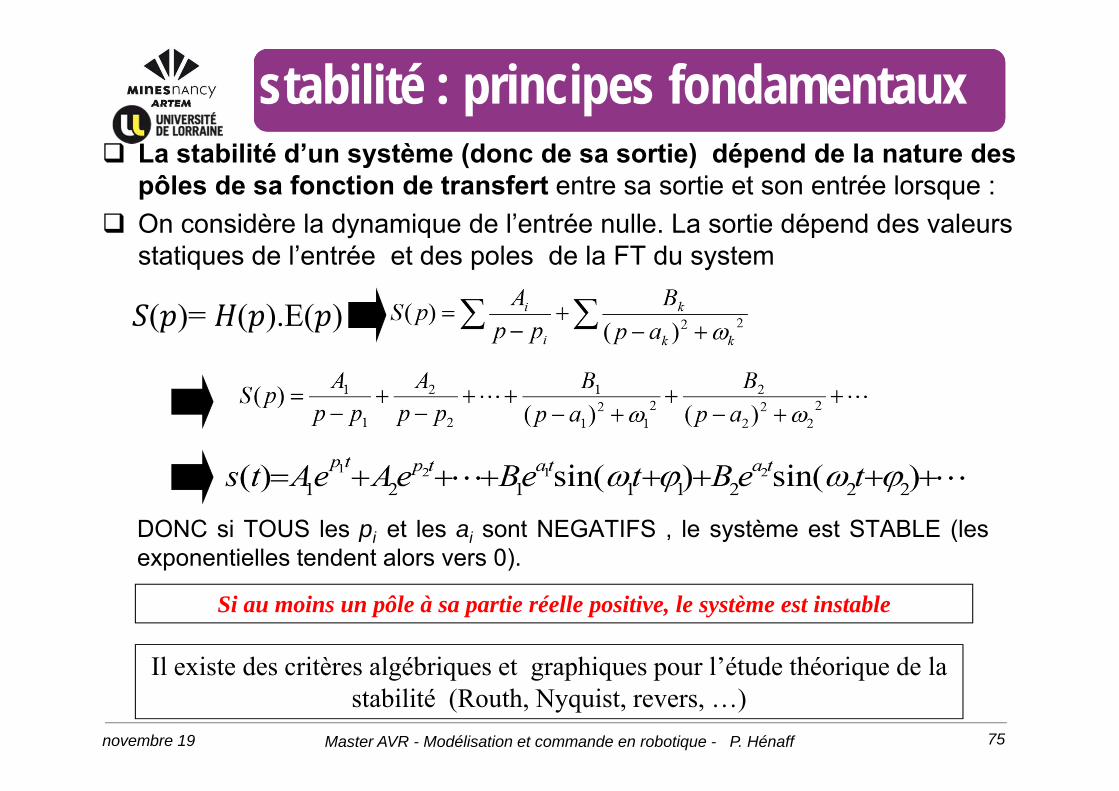
stabilité : principes fondamentaux La stabilité d’un système (donc de sa sortie) dépend de la nature des
pôles de sa fonction de transfert entre sa sortie et son entrée lorsque : On considère la dynamique de l’entrée nulle. La sortie dépend des valeurs
statiques de l’entrée et des poles de la FT du system
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 75
DONC si TOUS les pi et les ai sont NEGATIFS , le système est STABLE (lesexponentielles tendent alors vers 0).
Il existe des critères algébriques et graphiques pour l’étude théorique de la stabilité (Routh, Nyquist, revers, …)
Si au moins un pôle à sa partie réelle positive, le système est instable
𝑆(𝑝)= 𝐻(𝑝).E(𝑝)
Montrer par un exemple. Les etud trouvent difficille cette 1ere partie
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 76
stabilité
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 77
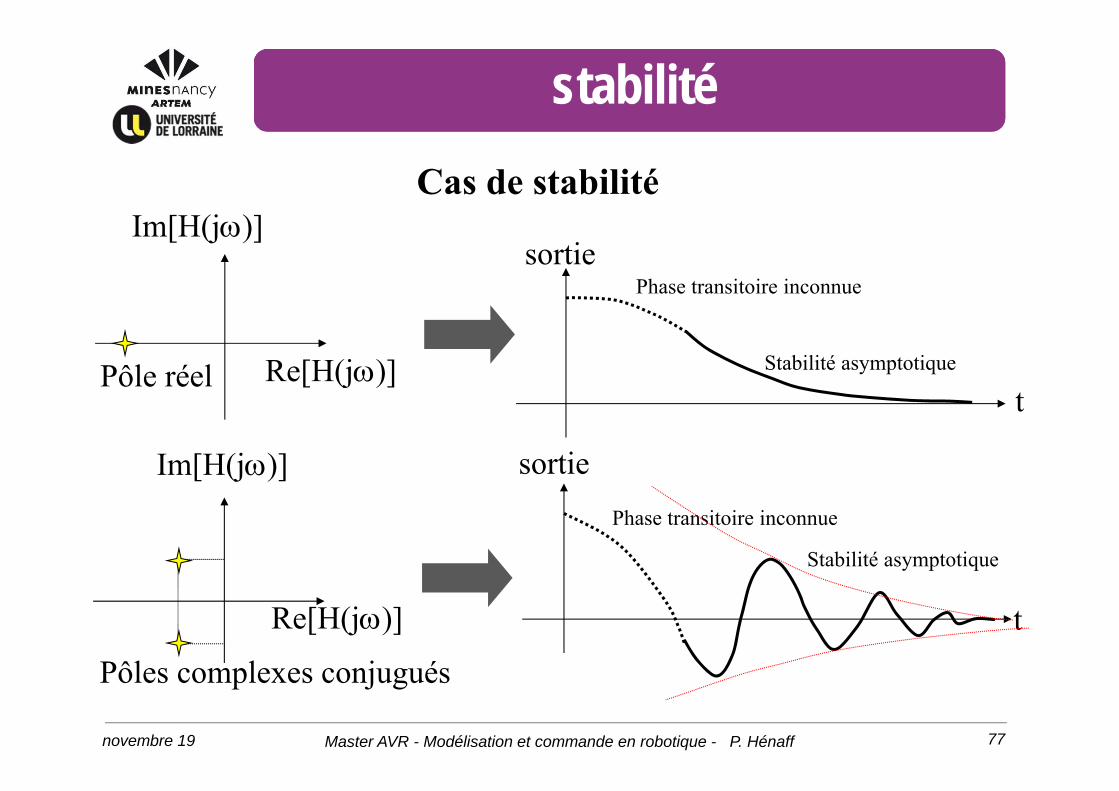
Im[H(j)]
Re[H(j)]t
Phase transitoire inconnue
Stabilité asymptotique
Im[H(j)]
Re[H(j)] t
Phase transitoire inconnue
Stabilité asymptotique
Cas de stabilité
Pôle réel
Pôles complexes conjugués
sortie
sortie
stabilité
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 78
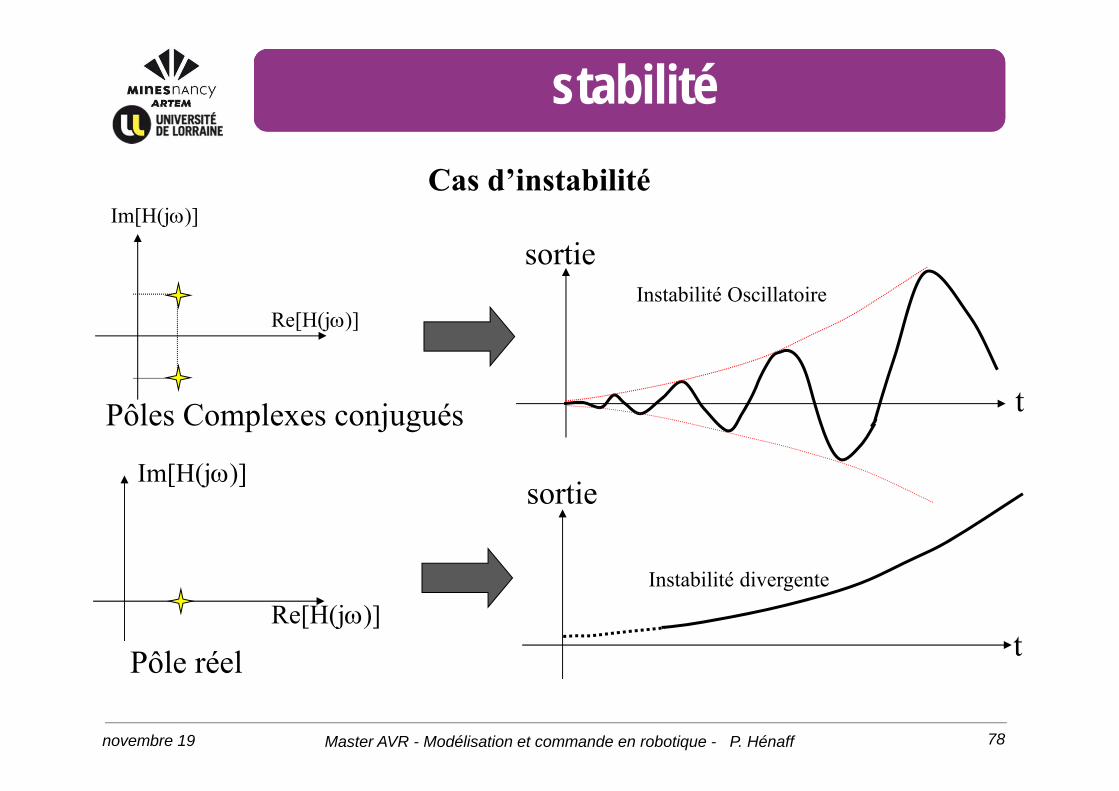
Im[H(j)]
Re[H(j)]
t
Instabilité Oscillatoire
Im[H(j)]
Re[H(j)]t
Cas d’instabilité
Pôles Complexes conjugués
Pôle réel
sortie
sortie
Instabilité divergente
stabilité
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 79
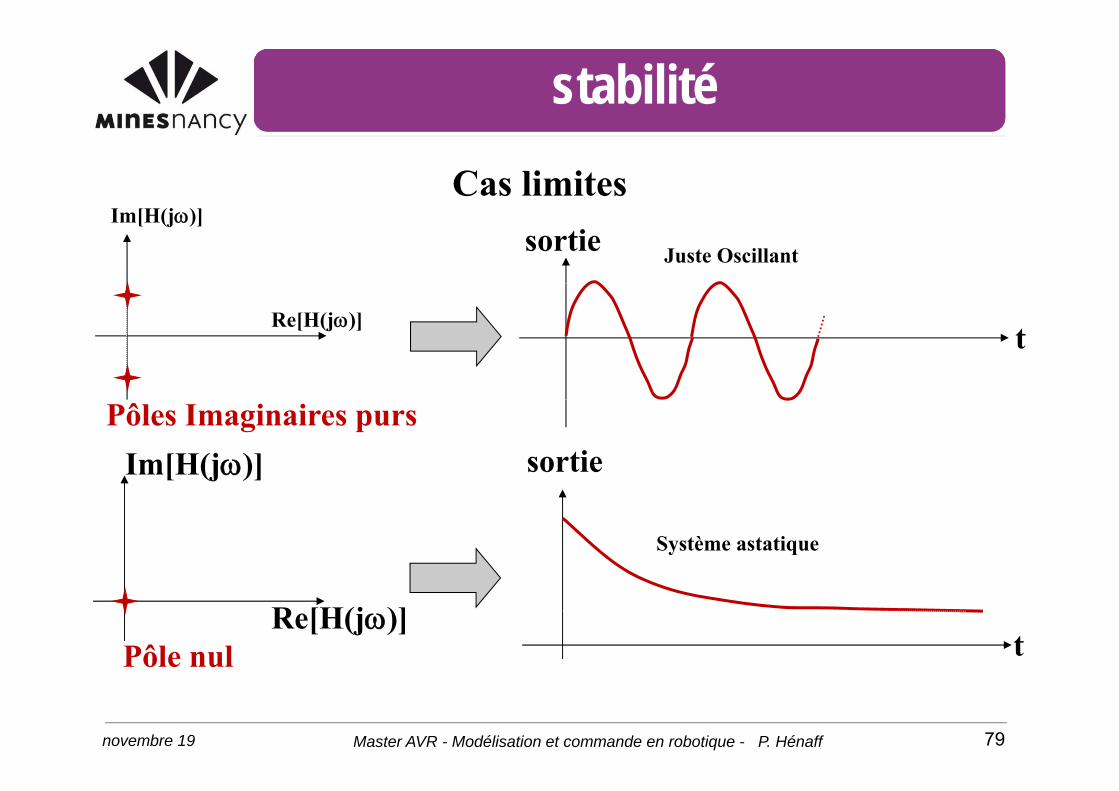
Im[H(j)]
Re[H(j)]t
Juste Oscillant
Im[H(j)]
Re[H(j)]t
Cas limites
Pôles Imaginaires purs
Pôle nul
sortie
sortie
Système astatique
correction des systèmes asservis
Principe général On cherche à asservir le système en position dans
l’espace articulaire en une configuration désirée qd . Le correcteur est supposé diagonal, c’est-à-dire que le
couple envoyé sur le moteur i ne dépend que de l’erreursur l’axe i.
Tous les effets de couplage sont considérés comme desperturbations que le correcteur doit rejeter.
Lorsque l’on souhaite atteindre une configuration désiréeqd , on effectue toujours une interpolation de trajectoire (lesconsignes en échelon ne sont utilisées que pour le réglagedu contrôleur, éventuellement).
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 80
correction des systèmes asservis
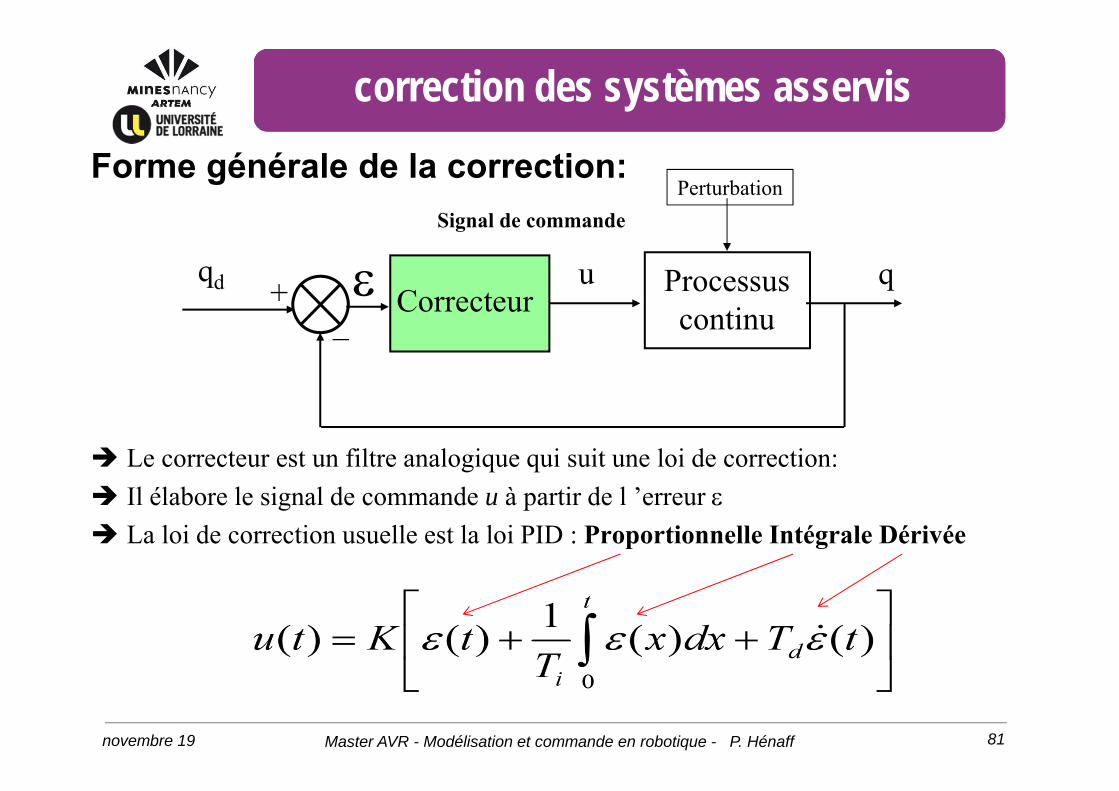
Forme générale de la correction:
Le correcteur est un filtre analogique qui suit une loi de correction: Il élabore le signal de commande u à partir de l ’erreur La loi de correction usuelle est la loi PID : Proportionnelle Intégrale Dérivée
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 81
Signal de commandePerturbation
qd q+_
Correcteuru Processus
continu
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 82
Principes théoriques de la correction d’un système asservi
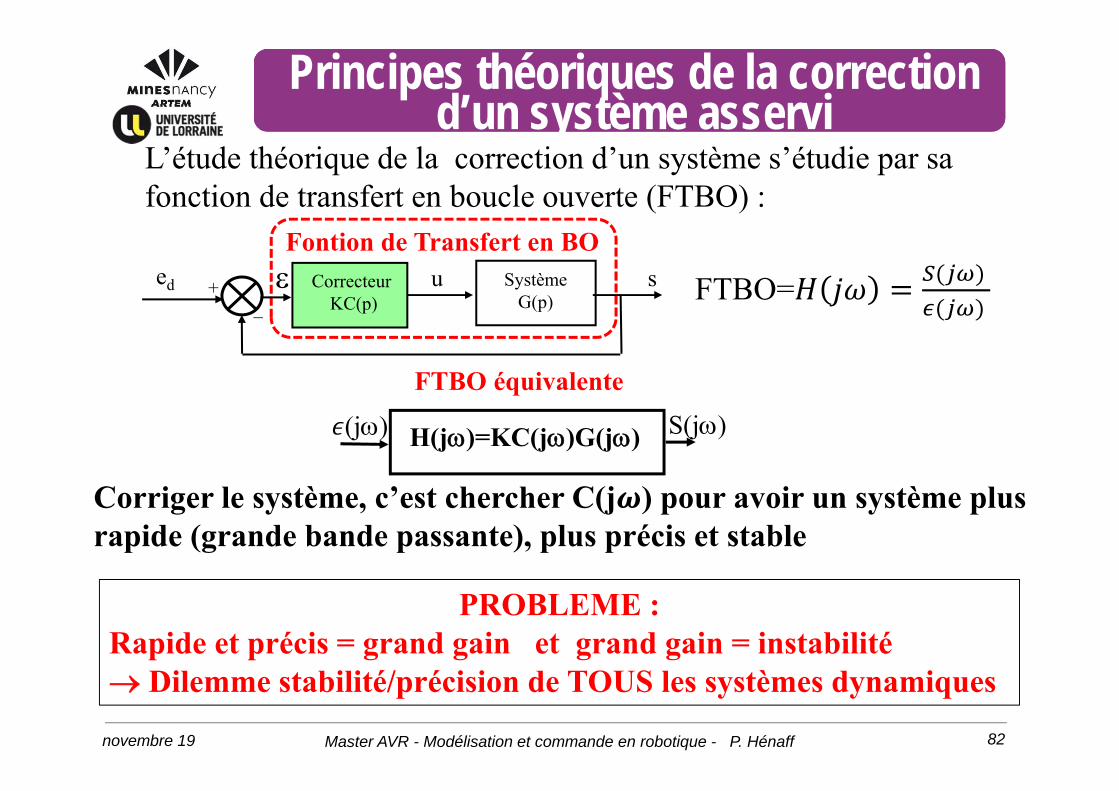
ed s+_
Correcteur KC(p)
u SystèmeG(p)
L’étude théorique de la correction d’un système s’étudie par sa fonction de transfert en boucle ouverte (FTBO) :
Fontion de Transfert en BO
H(j)=KC(j)G(j)𝜖(j) S(j)
FTBO équivalente
FTBO=𝐻 𝑗𝜔
Corriger le système, c’est chercher C(j𝝎) pour avoir un système plus rapide (grande bande passante), plus précis et stable
PROBLEME : Rapide et précis = grand gain et grand gain = instabilité Dilemme stabilité/précision de TOUS les systèmes dynamiques
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 83
Principe théorique de la correction d’un système asservi
Im[FTBO(j)]
Re[FTBO(j)]-1=
= 0
-1=
= 0
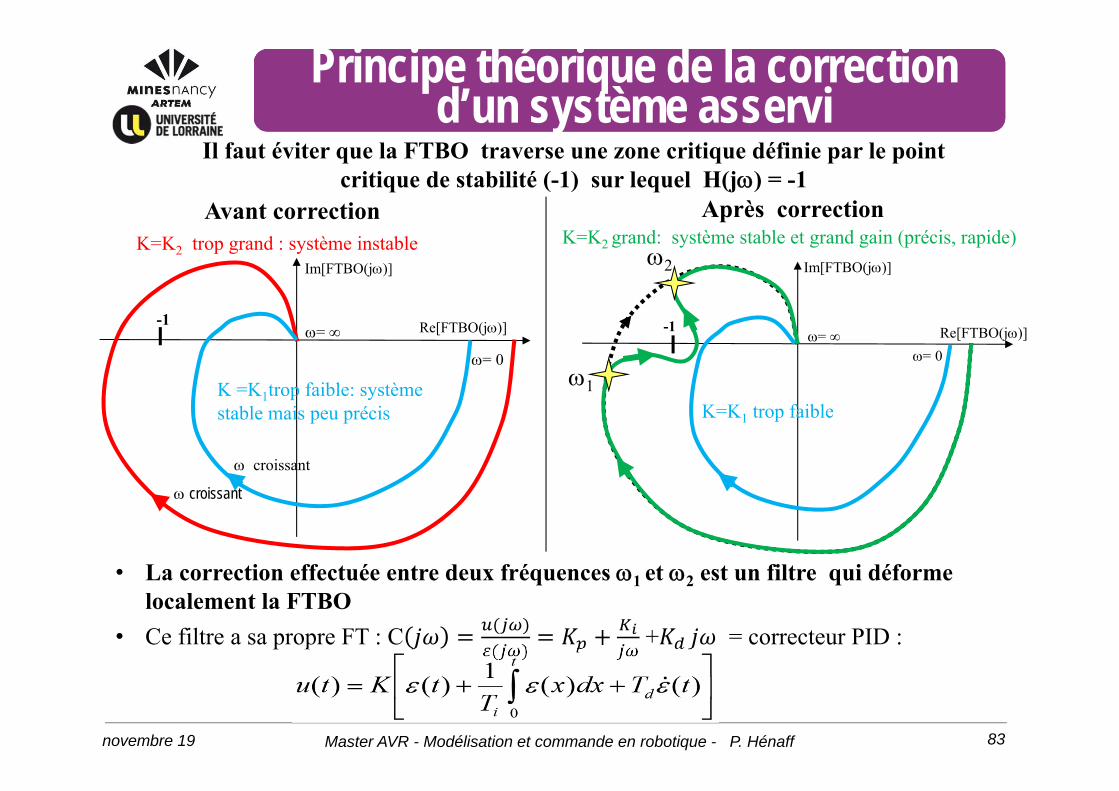
Avant correction Après correctionK=K2 trop grand : système instable
K =K1trop faible: système stable mais peu précis
• La correction effectuée entre deux fréquences 1 et 2 est un filtre qui déforme localement la FTBO
• Ce filtre a sa propre FT : C 𝑗𝜔 𝐾 +𝐾 𝑗𝜔 = correcteur PID :
1
2
K=K1 trop faible
K=K2 grand: système stable et grand gain (précis, rapide)
croissant
croissant
Il faut éviter que la FTBO traverse une zone critique définie par le point critique de stabilité (-1) sur lequel H(j) = -1
Re[FTBO(j)]
Im[FTBO(j)]
METHODES EXPERIMENTALES DE REGLAGE DU PID
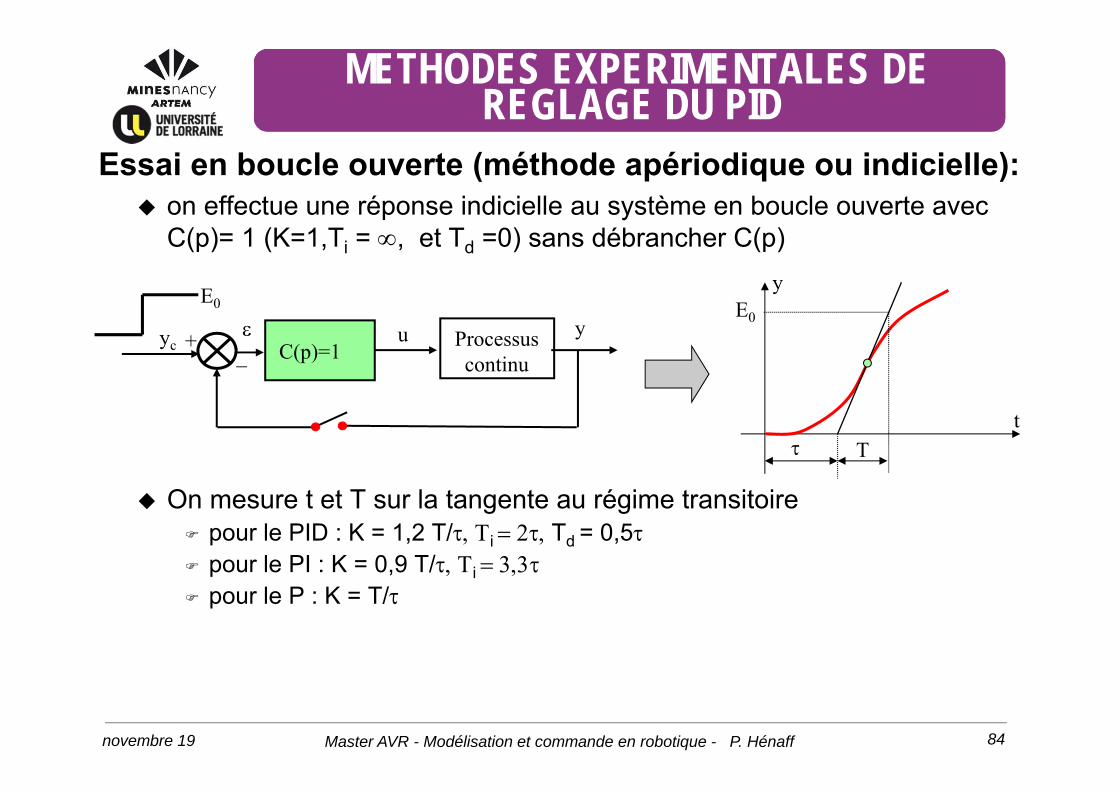
Essai en boucle ouverte (méthode apériodique ou indicielle): on effectue une réponse indicielle au système en boucle ouverte avec
C(p)= 1 (K=1,Ti = , et Td =0) sans débrancher C(p)
On mesure t et T sur la tangente au régime transitoire pour le PID : K = 1,2 T/i Td = 0,5 pour le PI : K = 0,9 T/i pour le P : K = T/
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 84
ycy+
_ C(p)=1u Processus
continu
E0y
t T
E0
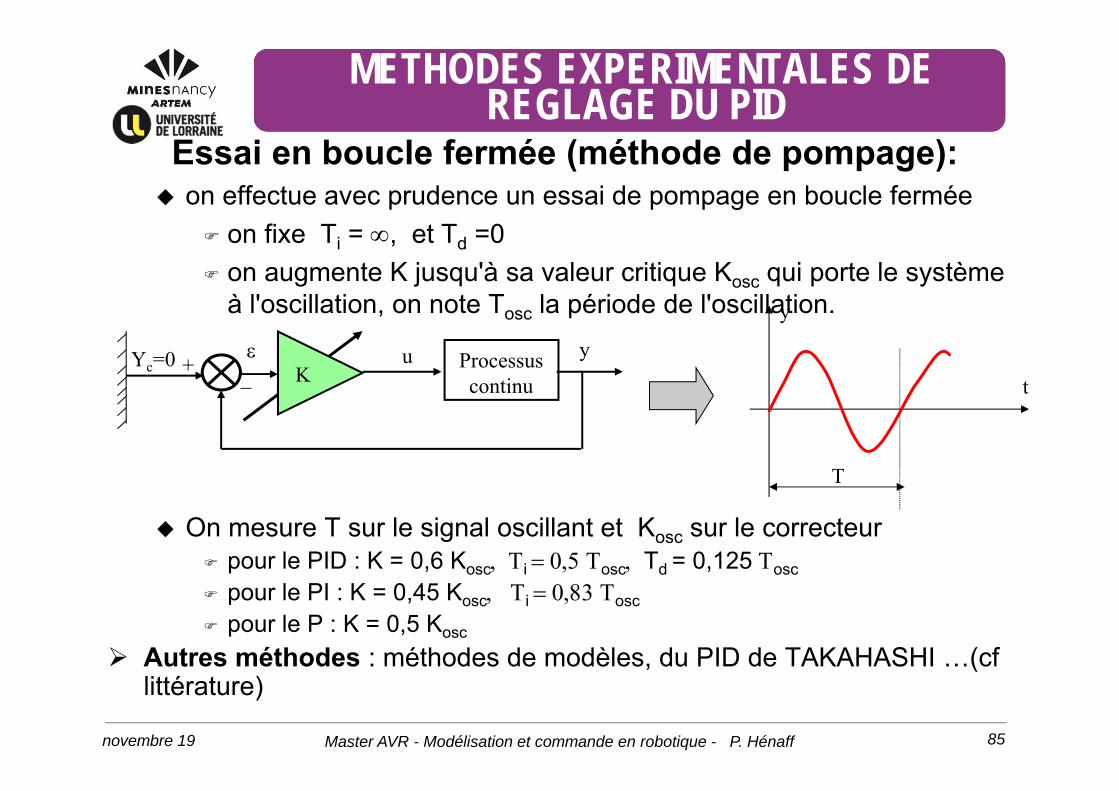
METHODES EXPERIMENTALES DE REGLAGE DU PID
Essai en boucle fermée (méthode de pompage): on effectue avec prudence un essai de pompage en boucle fermée
on fixe Ti = , et Td =0 on augmente K jusqu'à sa valeur critique Kosc qui porte le système
à l'oscillation, on note Tosc la période de l'oscillation.
On mesure T sur le signal oscillant et Kosc sur le correcteur pour le PID : K = 0,6 Kosci oscTd = 0,125 osc pour le PI : K = 0,45 Kosci osc pour le P : K = 0,5 Kosc
Autres méthodes : méthodes de modèles, du PID de TAKAHASHI …(cflittérature)
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 85
Yc=0 y+ _ K
u Processuscontinu
y
t
T
METHODES EXPERIMENTALES DE REGLAGE DU PID
Réglage du correcteur PID dans un robot manipulateur série : On commence par les axes les plus près de l’effecteur. Augmenter progressivement Kp jusqu’à obtenir deux oscillations pour
une réponse à un échelon Augmenter Kd pour amortir les oscillations. Du fait du calcul approché
du terme dérivé (non causalité) et des bruits de quantification, une vibration HF peut se faire entendre avant d’avoir obtenu l’amortissement voulu. Dans ce cas, diminuer Kp
Régler enfin Ki pour annuler suffisamment rapidement l’erreur résiduelle.
En général, on doit itérer deux ou trois fois. Chaque fois qu’un axe est réglé, l’essayer dans la configuration la plus
inertielle et la moins inertielle, à vitesse lente et à vitesse rapide.
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 86
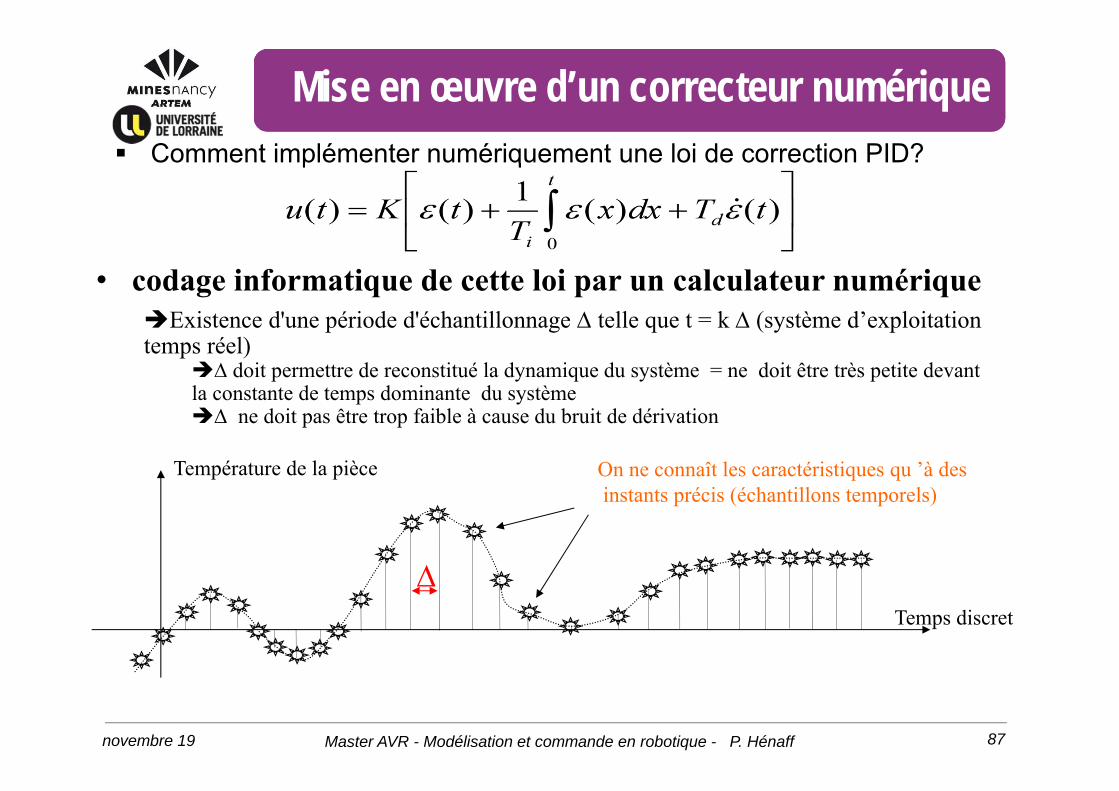
Mise en œuvre d’un correcteur numérique Comment implémenter numériquement une loi de correction PID?
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 87
• codage informatique de cette loi par un calculateur numériqueExistence d'une période d'échantillonnage telle que t = k (système d’exploitation temps réel)
doit permettre de reconstitué la dynamique du système = ne doit être très petite devant la constante de temps dominante du système ne doit pas être trop faible à cause du bruit de dérivation
Temps discret
Température de la pièce On ne connaît les caractéristiques qu ’à desinstants précis (échantillons temporels)
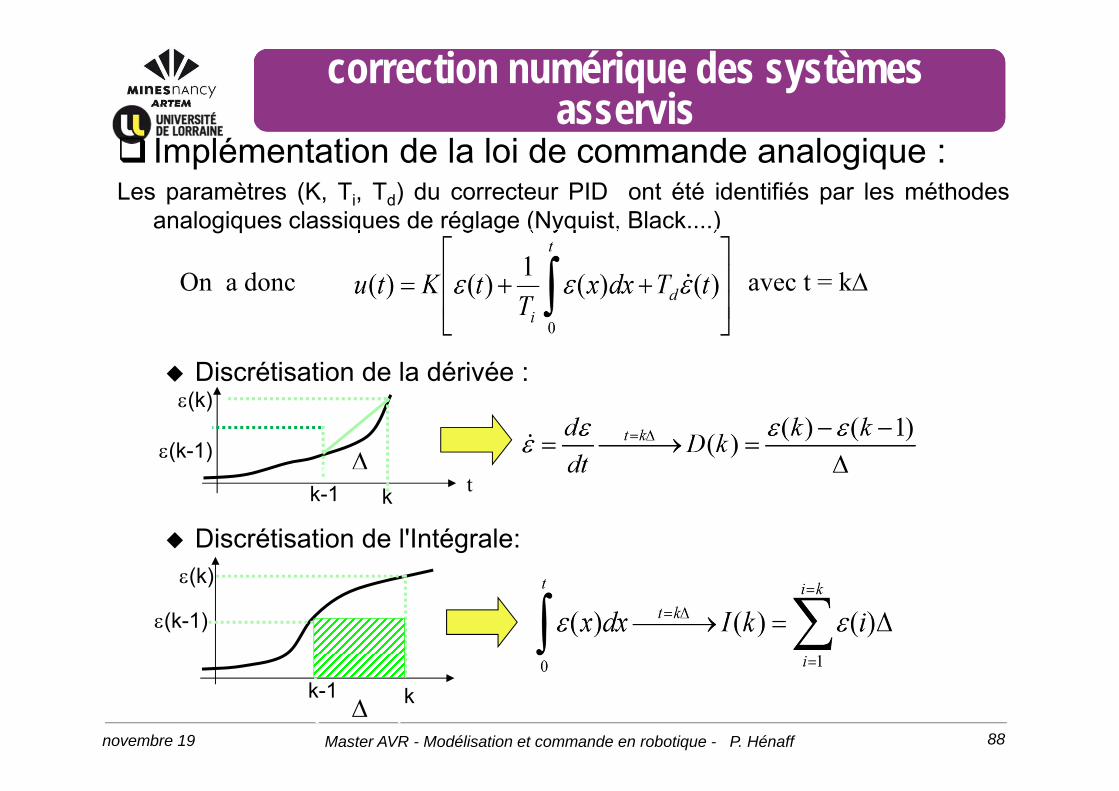
correction numérique des systèmes asservis
Implémentation de la loi de commande analogique :Les paramètres (K, Ti, Td) du correcteur PID ont été identifiés par les méthodes
analogiques classiques de réglage (Nyquist, Black....)
Discrétisation de la dérivée :
Discrétisation de l'Intégrale:
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 88
On a donc avec t = k
t
(k)
k-1 k
(k-1)
(k)
k-1
(k-1)
k
correction numérique des systèmes asservis
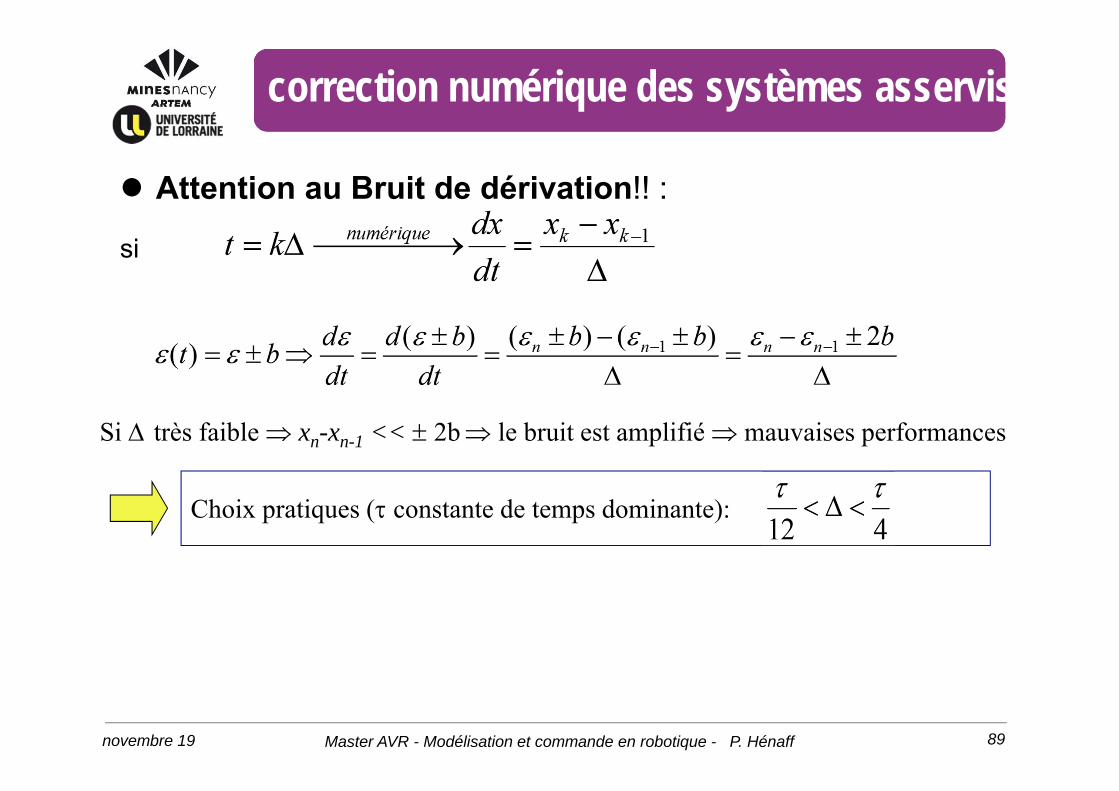
Attention au Bruit de dérivation!! :
si
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 89
Si très faible xn-xn-1 << 2b le bruit est amplifié mauvaises performances
Choix pratiques ( constante de temps dominante):
correction numérique des systèmes asservis
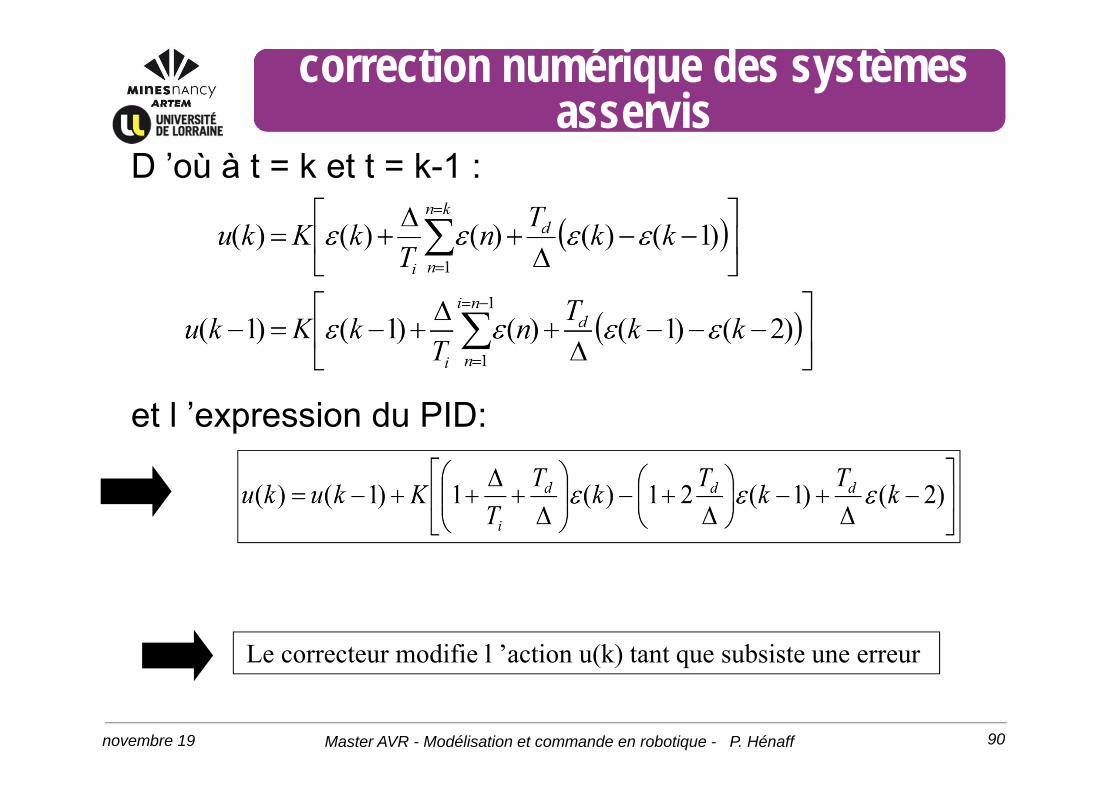
D ’où à t = k et t = k-1 :
et l ’expression du PID:
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 90
Terme correctif à la commande u(k)
Le correcteur modifie l ’action u(k) tant que subsiste une erreur
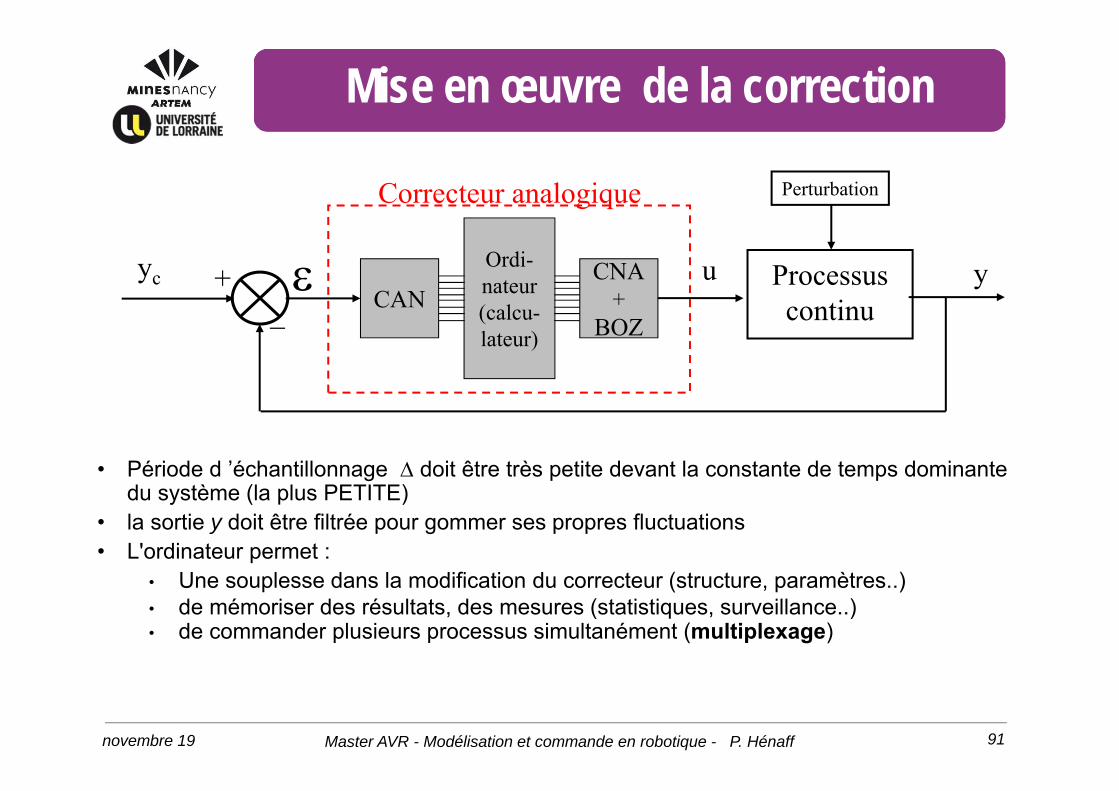
Mise en œuvre de la correction
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 91
yc yProcessuscontinu
+_
Correcteur analogique
uCAN
CNA+
BOZ
Ordi-nateur(calcu-lateur)
Perturbation
• Période d ’échantillonnage doit être très petite devant la constante de temps dominante du système (la plus PETITE)
• la sortie y doit être filtrée pour gommer ses propres fluctuations• L'ordinateur permet :
• Une souplesse dans la modification du correcteur (structure, paramètres..)• de mémoriser des résultats, des mesures (statistiques, surveillance..)• de commander plusieurs processus simultanément (multiplexage)
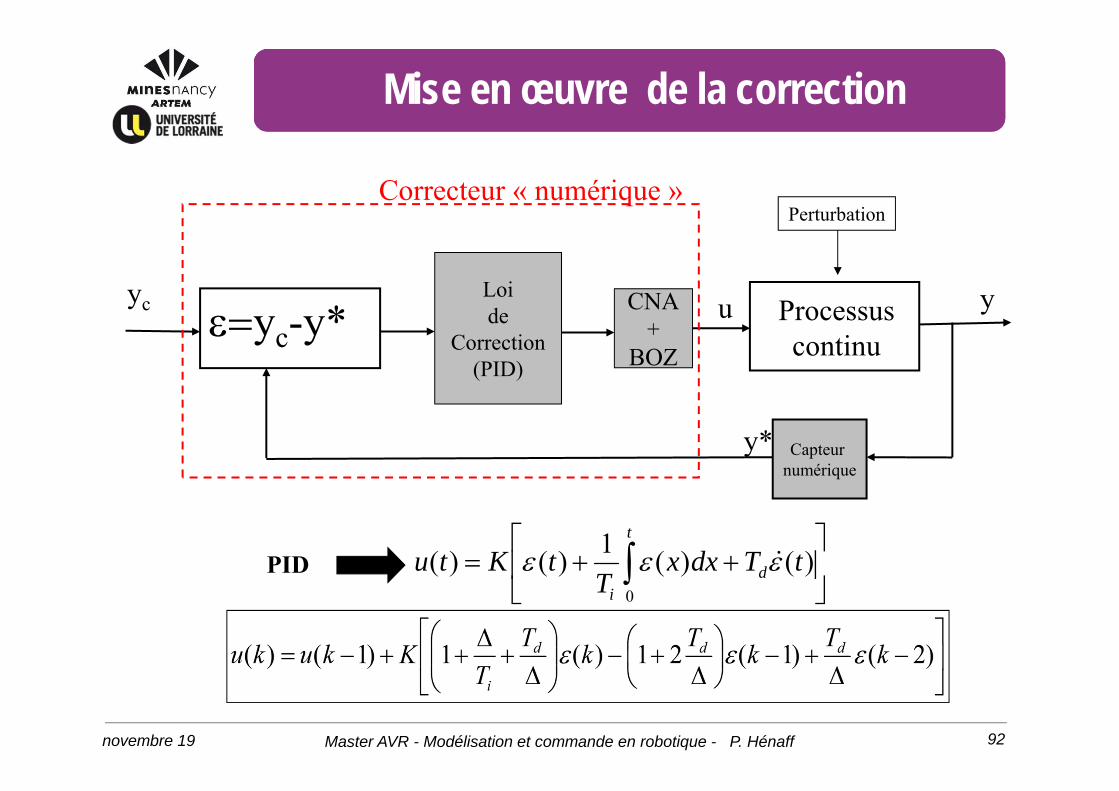
Mise en œuvre de la correction
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 92
yProcessuscontinu
uyc-y*
Capteur numérique
CNA+
BOZ
Loide
Correction(PID)
Perturbation
PID
t
di
tTdxxT
tKtu0
)()(1)()(
yc
y*
Correcteur « numérique »
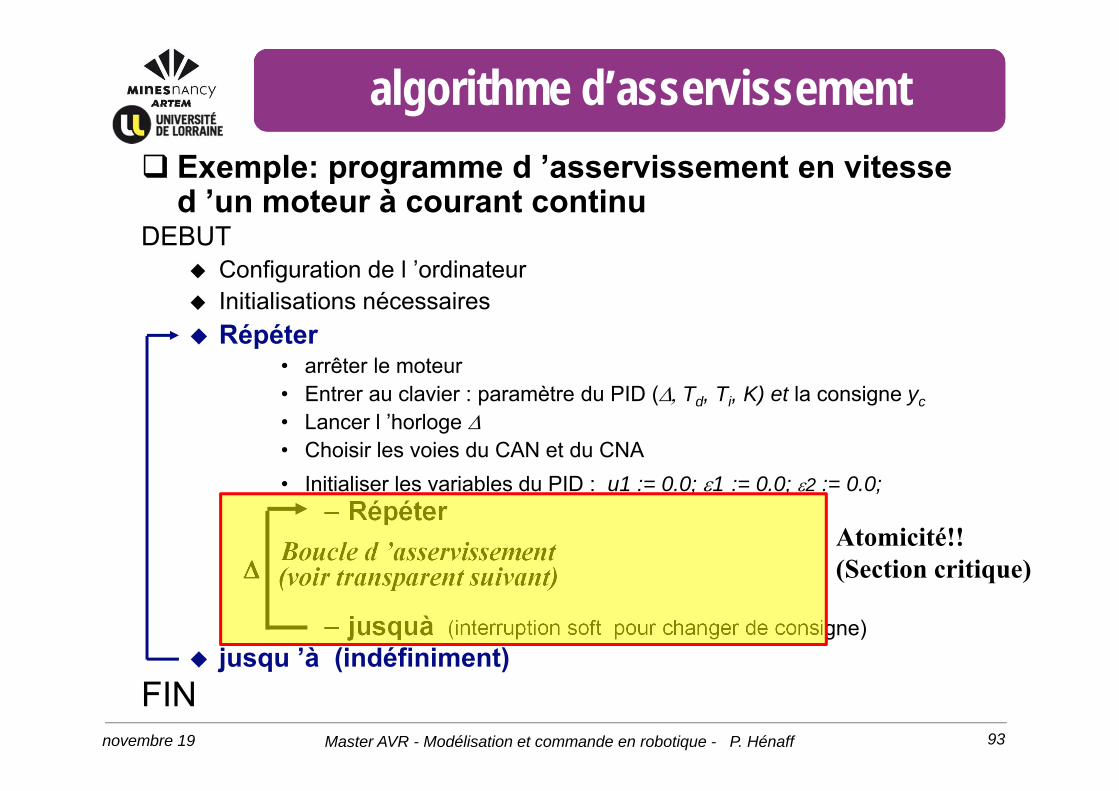
algorithme d’asservissement Exemple: programme d ’asservissement en vitesse
d ’un moteur à courant continuDEBUT
Configuration de l ’ordinateur Initialisations nécessaires Répéter
• arrêter le moteur • Entrer au clavier : paramètre du PID (Td, Ti, K) et la consigne yc• Lancer l ’horloge • Choisir les voies du CAN et du CNA• Initialiser les variables du PID : u1 := 0.0; 1 := 0.0; 2 := 0.0;
– Répéter
– jusquà (interruption soft pour changer de consigne) jusqu ’à (indéfiniment)
FINnovembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 93
Boucle d ’asservissement(voir transparent suivant)
Atomicité!!(Section critique)
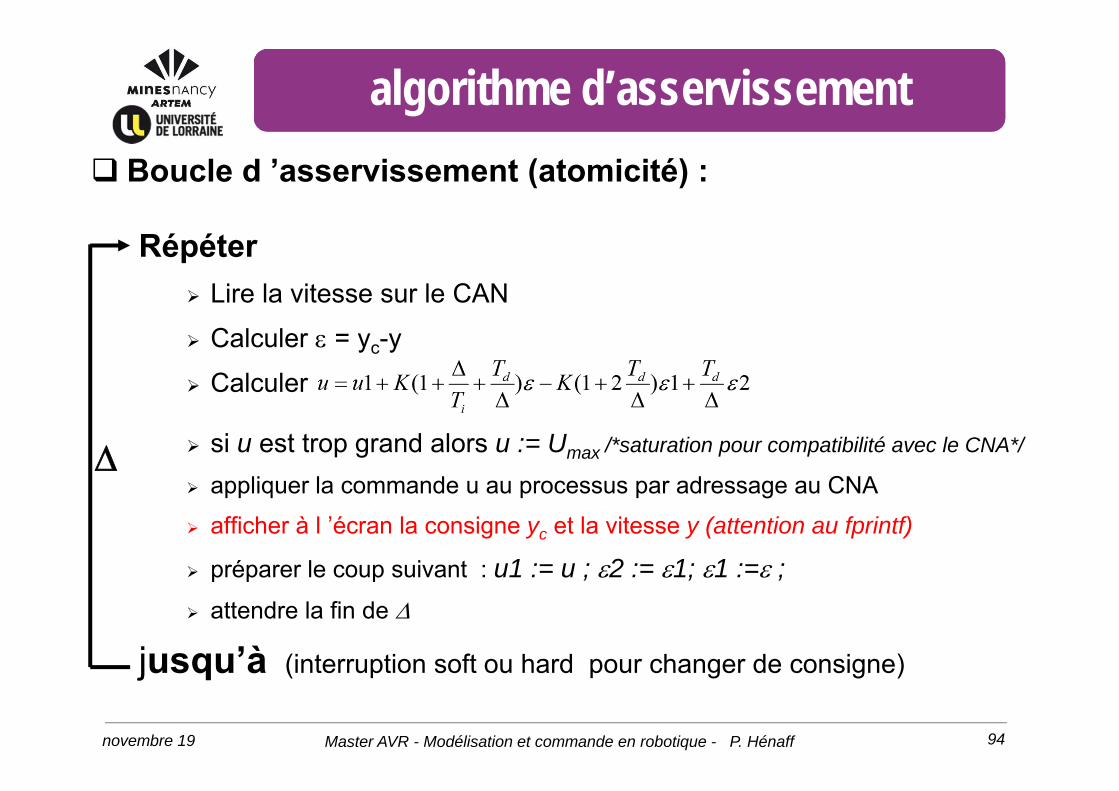
algorithme d’asservissement Boucle d ’asservissement (atomicité) :
Répéter Lire la vitesse sur le CAN Calculer = yc-y Calculer
si u est trop grand alors u := Umax /*saturation pour compatibilité avec le CNA*/
appliquer la commande u au processus par adressage au CNA afficher à l ’écran la consigne yc et la vitesse y (attention au fprintf)
préparer le coup suivant : u1 := u ; 2 := 1; 1 := ; attendre la fin de
jusqu’à (interruption soft ou hard pour changer de consigne)
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 94
NB: la consigne peut aussi suivre un programme (une « trajectoire » ) fixé à l ’avance
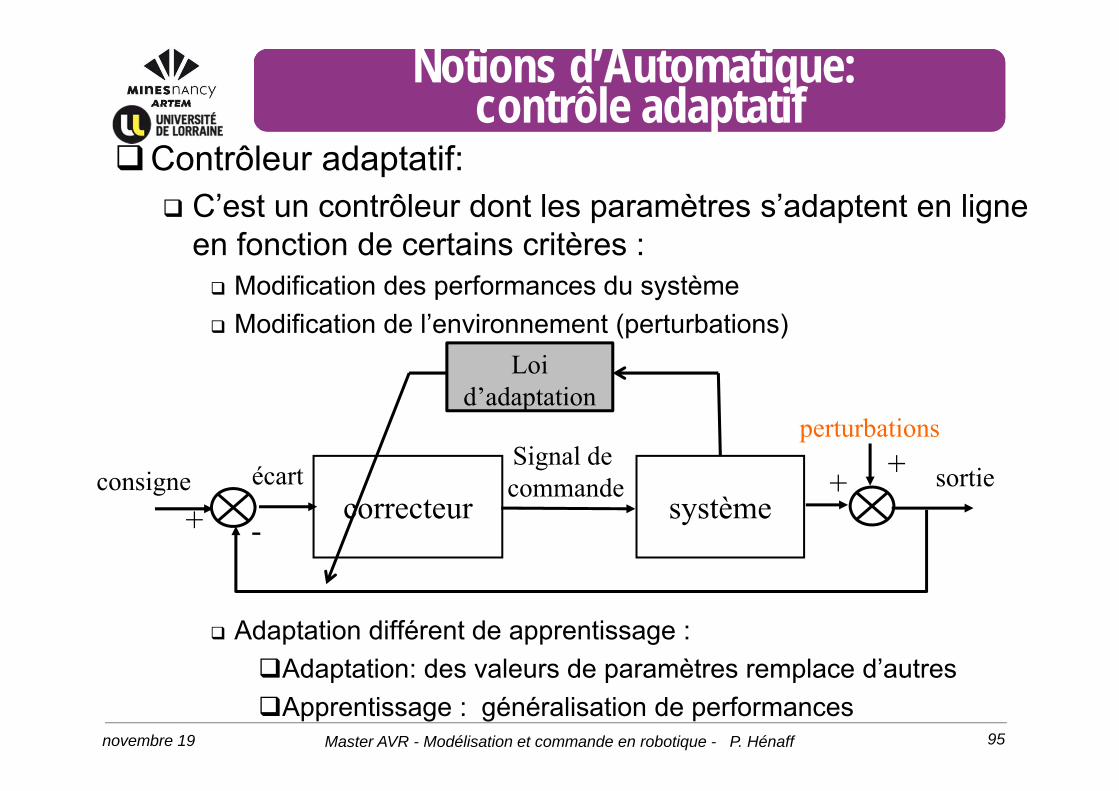
Notions d’Automatique:contrôle adaptatif
Contrôleur adaptatif: C’est un contrôleur dont les paramètres s’adaptent en ligne
en fonction de certains critères : Modification des performances du système Modification de l’environnement (perturbations)
Adaptation différent de apprentissage :Adaptation: des valeurs de paramètres remplace d’autresApprentissage : généralisation de performances
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 95
correcteur systèmeconsigne
Signal de commande sortie++
-+écart
perturbations
Loi d’adaptation
Notions d’Automatique: contrôle adaptatif
Critères d’adaptation : Loi d’optimalité:
énergétique, temporelle,
Loi de stabilité : maintenir la stabilité Lyapunov
Inspiration biologique et apprentissage: Réseau de neurones: perceptrons multicouches,
backpropagation (deep learning) Renforcement, Q learning Logique floue…
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 96
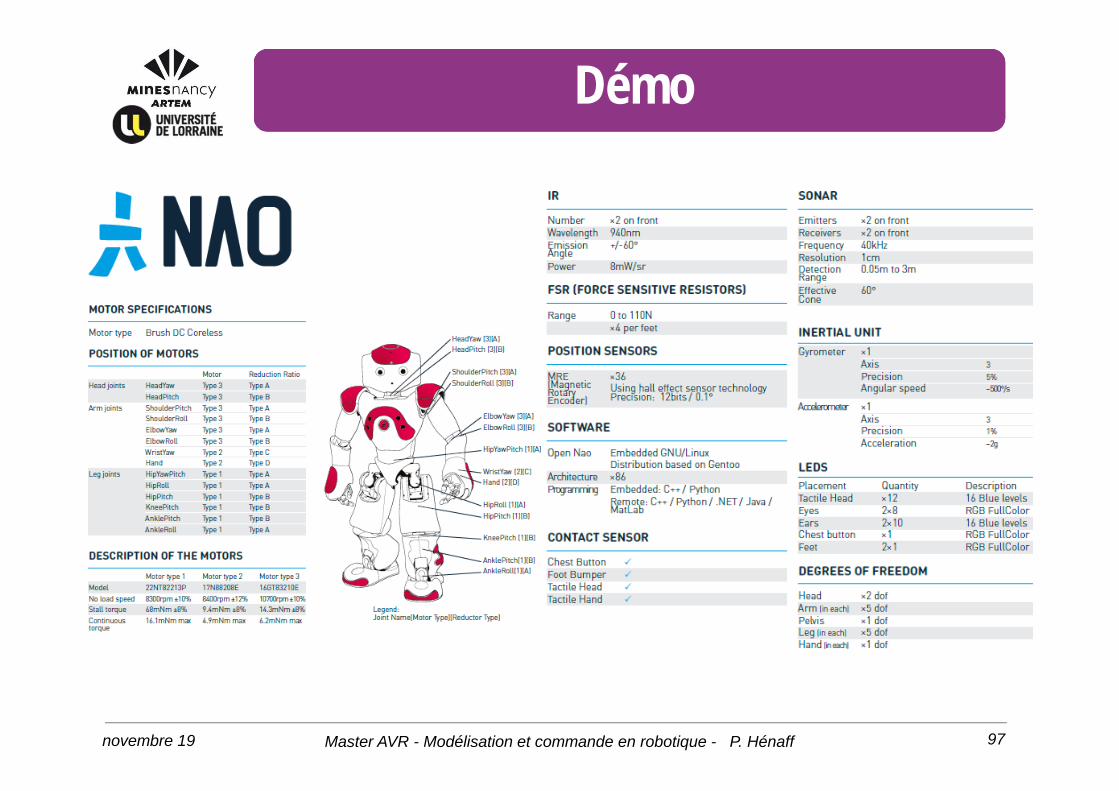
Démo
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 97
Démo
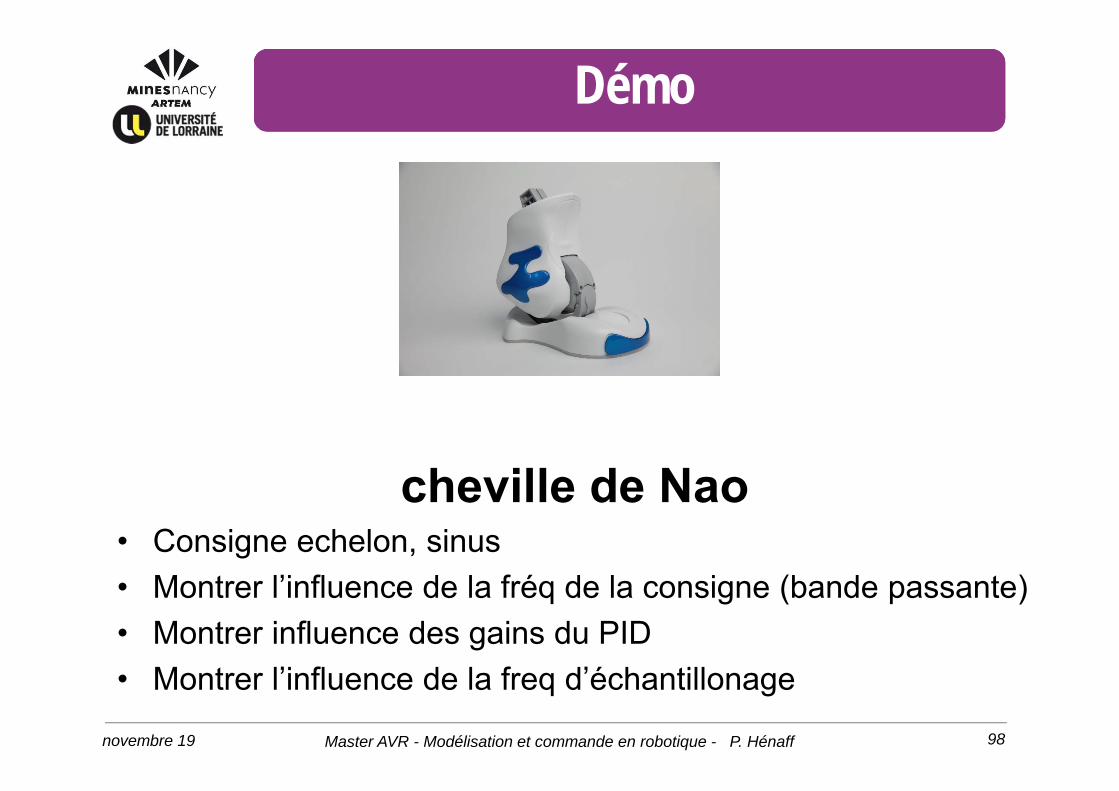
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 98
cheville de Nao• Consigne echelon, sinus• Montrer l’influence de la fréq de la consigne (bande passante)• Montrer influence des gains du PID• Montrer l’influence de la freq d’échantillonage
Préparer la Séance 4 :Simulateur Vrep
• Installer Vrep (V-REP PRO EDU) sur votre PC: http://www.coppeliarobotics.com/
• Faire les tutorials (au moins 3): http://www.coppeliarobotics.com/helpFiles/index.html
• Installer Python 3.5Backprop App EL pioneer????
novembre 19 Master AVR - Modélisation et commande en robotique - P. Hénaff 99





























