Embed Size (px)
Citation preview

La méthode des éléments finis
COURS 1
NOTIONS INTRODUCTIVES
1.1 Introduction
La méthode des éléments finis est une méthode de calcul numérique qui, ayant un profond caractère plus physique qu’abstrait, a été inventée plutôt par les ingénieurs que par les mathématiciens.
Cette méthode a été appliquée pour la première fois dans des problèmes liés à l’analyse des contraintes et depuis, elle a été étendue dans d’autres problèmes liés au milieu continu.
Dans toutes les applications l’analyste recherche à calculer une quantité de champ, comme par exemple :
Application Quantité de champ Analyse des contraintes Champ des contraintes ou champ des déplacements Analyse thermique Champ de température ou flux de chaleur Ecoulement des fluides Fonction de courant ou fonction du potentiel de vitesse
La méthode des éléments finis (abrégée MEF) représente une modalité d’obtenir une
solution numérique correspondant à un problème spécifique. Cette méthode n’offre pas une formule pour une certaine solution et ne résoud pas une classe de problèmes. La MEF est une méthode approximative à moins qu’un certain problème pourrait être extrémement simple conduisant ainsi à une formule exacte toujours valable.
1.2 Noeuds et éléments
Une description non-sophistiquée de la MEF pourrait être définie sous la forme suivante : la structure à analyser est divisée en plusieurs éléments (petites pièces comme celles qui forment un puzzle). Ces éléments sont ensuite reconnectés par l’intermédiaire des noeuds (fig.1.1). Ces noeuds sont « des punaises » ou « des points de colle » qui maintiennent les éléments dans un ensemble unitaire.
Fig.1.1 Discrétisation d’une structure en noeuds et éléments (dent d’une roue dentée)
1
noeuds
éléments

La méthode des éléments finis
Le comportement de chaque élément est décrit par un set d’équations algébriques. Dans l’analyse des contraintes ces équations sont des équations d’équilibre des noeuds. Du fait que le nombre de ces équations est très grand (centaines ou milliers), l’utilisation d’un ordinateur est absolument obligatoire.
Autrement dit, dans un élément, une quantité de champ (ex. le champ de déplacement) est interpolé à partir des valeurs existantes dans les noeuds. En connectant les éléments ensemble, la quantité de champ devient interpolée sur l’entier de la structure. Les meilleures valeurs de la quantité de champ dans les noeuds sont celles qui minimisent certaines fonctions (telle que l’énergie totale). Le processus de minimisation génère un set d’équations algébriques simultanées pour les différentes valeurs de la quantité de champ dans les noeuds.
Ce set d’équations est décrit sous forme matricéelle par :
(1.1)où :
= vecteur d’inconnues (valeurs de la quantité de champ dans les noeuds – ex : vecteur des déplacements) ;[K] = matrice des constates (connue – ex : matrice de rigidité) ;{F} = vecteur des chargements (connu – ex : matrice des forces nodales).
1.3 Etapes d’analyse par la MEF
Données d’entrée Procession des données d’entrée Données de sortie(préprocession) (postprocession)
- Coordonnées nodales- Supports (appuis etc.)- Blocages (conditions à la limite) - Contraintes
- Chargements - Déplacements - Propriétés des matériaux - Températures - Génération du réseau d’éléments finis
A présent il existe un grand nombre de logiciels pour l’analyse par la MEF : ANSYS, COSMOS-M, PATRAN, IDEAS etc.
1.4 Classification des problèmes d’analyse des contraintes
Au cas où la variation du déplacement ou de la contrainte sont négligeables au long de l’axe z (la direction normale au plan d’analyse) on considère un problème plan. Si par contre les déplacements et les contraintes peuvent varier dans toutes les directions x, y ou z la structure en cause peut être appellée « Solide 3D ». Un cas spécial de solide ayant symétrie axiale (ex : une cloche) s’appelle de façon usuelle « Solide de révolution ». Les chargements à leur tour peuvent ou non être distribués de façon axiale symétrique. Une plaque plane qui supporte des chargements dans son plan est un problème plan. Par contre, si la plaque est chargée par des forces qui n’agissent pas dans son plan, cela représente un problème de flexion de plaque ou, plus simplement un problème de plaque (en anglais : PLATE PROBLEM ). Si la plaque est courbe elle devient une coque (en anglais : SHELL ). Les réservoirs, par exemple, peuvent être considérés dans l’analyse par la MEF, des coques.
En conclusion les éléments finis peuvent être divisés en plusieurs catégories en fonction de la structure : éléments plans, éléments solides 3D, éléments solides à symétrie axiale, éléments de plaque, éléments de coque. On trouve de même des éléments de barre articulée (en anglais : TRUSS), éléments de poutre (en anglais : BEAM), éléments de fondation élastique etc.
2

La méthode des éléments finis
1.5 Etapes d’analyse par la MEF
Pour faire une analyse par MEF prenez soin lorsque vous faites la modélisation. Mieux vaut prévenir que guérir. Le processus de modélisation nécessite que l’action physique du problème à être résolu doit être bien comprise afin de choisir des types d’éléments finis appropriés, convenables, qui puissent représenter de façon adéquate l’action physique réelle.
Fig.1.2 Principales étapes pour une analyse par la Méthode des Eléments Finis
3
Un problème doit être résolu
L’analyse par éléments finis
est-elle nécessaire ?
OUI NON
Solutions expérimentales
ouanalytiques
STOP
Anticipez le comportement
physique.Pensez comment
les résultats offerts par la MEF seront vérifiés pour voir
s’ils sont raisonnables.
Concevez un modèle initial à
l’aide des éléments finis
Préprocession :préparez le
modèle
Procession :Résoudre les équations du
modèle proposé
Postprocession :affichez les résults obtenus suite au
roulage
LOGICIEL
Les résultats sont-ils raisonnables ?
Les erreurs estimées sont petites ?
NO
N
STOP
OU
I
Pensez à réviser le modèle en
améliorant le modèle déjà
existant

La méthode des éléments finis
Il est souhaitable de ne pas utiliser des éléments « déformés » ou des éléments grossiers pour représenter des variations considérables d’une certaine quantité de champ. A l’autre extrême un sur-raffinage pourrait conduire à une perte de temps pour l’analyste ainsi qu’à un surchargement de la mémoire de l’ordinateur.
Cependant, même si un grand nombre d’éléments est utilisé dans la discrétisation il y a une erreur dénommée erreur de discrétisation qui existe du fait que la structure physique et le modèle mathématique ont une infinité de degrés de liberté (qui sont au fait les déplacements pour une infinité de points de la structure, tandis que le modèle avec éléments finis a un nombre fini de degrés de liberté.
Combien d’éléments sont-ils nécessaires pour une discrétisation ? Imaginons que nous réalisons deux analyses par MEF, la deuxième fois utilisant un réseau de discrétisation plus raffiné. Ce modèle aura moins d’erreurs de discrétisation par rapport au premier et représentera mieux la géométrie si l’objet physique a des surfaces courbes. Au cas où les deux analyses conduisent vers des solutions similaires, on suspecte que les résultats n’ont pas d’erreurs remarcables. Le processus itératif de discrétisation s’arrêtera au moment où les erreurs par rapport à la plus fine discrétisation sont situées au dessous de 5%.
A part les erreurs introduites par l’analyste lors de la discrétisation, l’ordinateur introduit des erreurs numériques par l’arrondissage ou par le tronquage des nombres qui sont introduits dans les matrices et qui servent à la résolution des équations.
Les logiciels d’analyse par éléments finis sont devenus sur une large échelle des instruments de calcul facile à utiliser et peuvent afficher les résultats sous une forme très attractive. Même le plus inhabile utilisateur peut offrir une réponse quelle qu’elle soit. Mais une carte joliment colorée des contraintes et des déformations peut être obtenue pour n’importe quel modèle bon ou mauvais. Il se peut que la plupart des analyses par MEF soient si deffectueuses qu’elles ne peuvent pas être dignes de confiance.
Un utilisateur responsable doit comprendre suffisamment bien la nature physique du problème et le comportement des éléments finis afin de préparer un modèle convenable et de bien évaluer la qualité des résultats. La responsabilité des résultats obtenus revient à l’ingénieur qui utilise le logiciel et non pas au vendeur de ce logiciel, même si les résultats sont affectés par les erreurs du programme.
1.6 Connaissances requises pour la réalisation des logiciels MEF
La MEF a un caractère pluridisciplinaire. Pour pouvoir réaliser des logiciels qui puissent résoudre certains types de problèmes dans le domaine du génie mécanique, il s’impose de maitriser les disciplines suivantes :
- la mécanique des structures (statique, dynamique, la résistance des matériaux, les vibrations mécaniques) ;- l’analyse numérique (procédés et algorithmes de calcul, graphique sur l’ordinateur) ;- programmation linéaire (C++, Pascal etc.)De la famille des grands logiciels, avec de multiples facilités, réalisés par des
compagnies spécialisées qui sont généralement utilisés par des collectifs de recherche, font partie, entre autres, NASTRAN, ANSYS, COSMOS, ALGOR, IMAGES3D etc.
1.7 Connaissances nécessaires à un utilisateur MEF
Un utilisateur est mis dans la situation de résoudre un certain problème. On doit mentionner dès le début que le logiciel appliqué au problème respectif ne le résoud pas. Il ne fait que résoudre un modèle créé par l’utilisateur. Les résultats peuvent être confirmés ou pas, en fonction du modèle choisi par l’utilisateur. La modélisation est une activité de simplification de la structure en l’encadrant ses différentes portions dans une des catégories suivantes : barres, plaques, blocs massifs, en tenant compte des chargemets, appuis etc. La modélisation correcte (la plus proche de la réalité) est un problème d’expérience, d’inspiration et moins de la connaissance des fondements théoriques de la méthode.
4

La méthode des éléments finis
1.8 Discrétisation
La Méthode des Eléments Finis a développé une série de types d’éléments finis qui, pour le début, peuvent être classifiés en :
- éléments finis unidimensionnels (généralement des barres) ;- éléments finis bidimensionnels (plaques et mêmes volumes) ;- éléments finis tridimensionnels (blocs massifs).
Eléments linéairesparaboliques
(quadratiques)cubiques
unidimensionnels
bidimensionnels
tridimensionnels
autres types Masse Ressort Contact
Les éléments finis sont générés par des points qui ne sont que des nœuds de la structure. Il existe des éléments ayant un degré supérieur à ceux cubiques (qui sont les plus performants) mais le plus courrament sont utilisés les éléments linéaires et paraboliques.
Certains éléments finis ont des nœuds intérieurs pour améliorer la précision, mais l’utilisateur ne travaille pas avec ces nœuds. Ils sont générés et ensuite condensés dans la phase de calcul des matrices de rigidité des éléments.
COURS 2
5

La méthode des éléments finis
ANALYSE LINEAIRE STATIQUE DES BARRES ARTICULEES ET DES POUTRES
2.1 Introduction
Dans ce chapitre sera présenté et expliqué le sens physique des matrices de rigidité pour les éléments de barre articulée et pour les éléments de poutre.
L’analyse statique néglige le temps comme variable indépendante et reste valable autant que les déflexions sont constantes ou varient peu. L’analyse linéaire statique sera excluse au delà de la limite d’écoulement (domaine plastique), où les déformations sont suffisamment grandes conduisant à une défaillance de la structure.
Après avoir fait une analyse préliminaire approximative, les principales étapes qu’il faut prendre en compte au cours d’une analyse par MEF sont les suivantes :
1. Préparation du modèle. En ce sens ci l’analyse doit contenir :a) la discrétisation de la structure ou du milieu continu divisé en éléments finis ;b) l’application du chargement ;c) la prescription des supports.
2. Accomplissement des calculs. Le logiciel doit :a) générer la matrice de rigidité [ki] de chaque élément « i » ;b) relier les éléments ensemble, ce qui veut dire rassembler les matrices [k i] de
chaque élément « i » pour obtenir la matrice globale [K] ;c) rassembler les chargements dans un vecteur global de chargements {F} ;d) imposer les conditions dans les supports ;e) résoudre les équations pour le vecteur des inconnues {}
(déplacements nodaux).3. Postprocession de l’information contenue dans le vecteur {}. Dans l’analyse des
contraintes, cela est équivalent au calcul des contraintes et des déformations.
La première étape est la plus importante du fait que cela nécessite un bon jugement de l’analyste sur les types d’éléments finis qui doivent être utilisés dans l’analyse et combien de grossière ou raffinnée doit être la discrétisation dans différentes régions du modèle. La deuxième étape est automatiquement réalisée par l’ordinateur. De façon similaire, le troisième pas est réalisé par l’ordinateur, où la carte en couleur des contraintes et des déformations résultantes sera fournie automatiquement.
2.2 Déduction de la matrice de rigidité pour l’élément de barre articulée
a) Méthode directe .
On considère un élément de barre uniforme, prismatique et élastique, de longueur L, de module élastique E et d’aire de la section transversale A (fig. 2.1). Un noeud est localisé à chacune des extrémités de la barre. Les seuls déplacements qui sont permis sont ceux axiaux.
On déplace d’abord le premier noeud, ensuite le deuxième et, dans chaque cas, on calcule les forces qui doivent être appliquées dans les noeuds pour maintenir le même état de déplacement.
Ces forces sont faciles à déterminer à partir de la formule élémentaire de la Résistance
des matériaux, , d’où la force qui résultera sera : .
On note avec Fij la force au noeud « i » (i =1,2) associée au déplacement du noeud « j » (j = 1,2).
Pour les deux cas, on aura :
6
1 2
21
L
L
F11 F21
F12 F22
u2
u1
A,E
A,E

La méthode des éléments finis
F11 = F21 =
(2.1)
F12 = F22 =
Fig.2.1 Forces nodales associées aux déplacements nodaux pour un élément de barre articulée
Si on écrit les relations (2.1) sous forme matricéelle, on aura :
(2.2)
Conformément à la convention de signes, on considère que les forces ainsi que les déplacements sont positifs dans la même direction (dans notre cas de gauche à droite). Si on remplace les forces par les expressions (2.1) on aura :
(2.3)
b) Procédure formelleLa méthode directe présentée ci-dessus ne peut fournir une expression de la matrice de
rigidité que pour les cas très simples, là où les formules dérivées de la Résistance des matériaux fournissent des relations de calcul entre les déplacements nodaux et les forces nodales.
En généralisant, on doit trouver une formule de la matrice de rigidité [K] valable pour n’importe quel type d’élément. Cette formule générale est :
(2.4)
où :[B] = matrice déformation-déplacement[E] = matrice des propriétés du matériau (matrice constitutive)dV = incrément de l’élément de volume V.
L’équation (2.4) peut être déduite du point de vue énergétique, en affirmant que le travail Lext
réalisé par les forces nodales qui sont appliquées pour créer des déplacements nodaux est emmagasiné dans l’élément comme énergie de déformation élastique (Lext = Udef).
Pour obtenir la matrice [B] pour l’élément de barre articulée, on commence par écrire l’expression du déplacement axial « u » à un point arbitraire de la barre.
Comme on peut constater de la figure 2.2, suite à une interpolation du déplacement « u » entre les deux valeurs nodales connues, u1 et u2, nous conduit à :
, (2.5)
ou bien :
7

La méthode des éléments finis
(2.6)[N] = matrice des fonctions de forme{d} = vecteur des déplacements nodaux
Chaque fonction de forme décrit comment varie « u » avec la distance x lorsque le degré de liberté correspondant ui est égal à 1 tandis que l’autre est égal à 0, c’est-à-dire :
- pour x = 0, = 1 et = 0 ;
- pour x = L, = 0 et = 1.
Fig.2.2 Les fonctions de forme pour un élément de barre à deux noeuds
La déformation axiale x = (2.7)
Donc, en appliquant la relation (2.4) on obtient :
(2.8)
2.3 Déduction de la matrice de rigidité pour l’élément de poutre
a) Méthode directe
La figure 2.3 montre un élément de poutre dans le plan. L’élément est prismatique, ayant un module d’élasticité longitudinal E, de moment d’inertie I pour la section axiale. L’axe qui passe par les centres de chaque section a un déplacement latéral v = v(x). Conformément à la théorie des poutres la fonction v = v(x) est un polynôme cubique en x pour une poutre uniforme prismatique chargée à ses extrémités.
a b
8
L L L
u2u1
u = N1u1+N2u2
L
xLN1
L
xN2
1 1
x xx
v1
12
v2
E, I
L
xθz1
θz2
12
F1 F2
E, I
L
xM1
M2
k31
k41w1=1
E, Ik11
k21
k12
k22
k32
k42θy1=1

La méthode des éléments finis
c d
e f
Fig. 2.3
a) Elément de poutre et ses degrés de libertéb) Chargements nodaux associés aux degrés de liberté
c) Formes déviées associées par l’activation de chaque degré de liberté
Les fonctions de forme associées par l’activation de l’un des quatre degrés de liberté sont présentées dans le Tableau 2.1.
Tableau 2.1
Activation du degré de liberté Fonction de forme correspondante
Déplacement du noeud 1
Rotation du noeud 12
32
2L
x
L
x2xN
Déplacement du noeud 2
Rotation du noeud 2
Les sens des déplacements sont considérés positifs de bas vers le haut tandis que les sens positifs des rotations correspondent au sens anti-horaire.
Pour trouver les composantes de la première colonne de la matrice de rigidité [K]
correspondant à l’élément de poutre, respectivement on a utilisé les
conditions suivantes :
dans le noeud 1, ce qui conduit à : (2.9)
dans le noeud 1, ce qui conduit à : (2.10)
A part ces deux équations, les équations d’équilibre de la statique seront ajoutées pour déterminer les deux autres composantes, respectivement k31 et k41 :
(2.11)
De façon similaire, on aura pour chacun des trois états de déformation restés un set de quatre équations. En ce cas, chacun de ces trois états complètera les trois colonnes restées inachevées de la matrice de rigidité.
9
k14 k34θy2=1
k24 k44
k43
w2=1k33E, I
k13
k23
La méthode des éléments finis
La matrice de rigidité [K] opère sur le vecteur des degrés de liberté associés à chaque noeud, [] = T.
Le résultat de ce processus sera donc :
(2.12)
b) Procédure formelle
La forme spéciale de l’équation (2.4) sera dans ce cas :
(2.13)
où [B] est maintenant la matrice qui donne l’expression de la courbure de l’élément de poutre à partir du produit [B]{} :
(2.14)
En terme de coordonnées généralisées i le déplacement latéral w = w(x) pour un élément de poutre sera sous la forme d’un polynôme cubique :
w = 1 + 2x + 3x2 + 4x3 (2.15)
Les termes i (i = 1...4) peuvent être déterminés en fonction des degrés de liberté associés à chaque noeud. Par exemple :
- à x = 0, w = w1 et θy = θy1, où
- à x = L, w = w2 et θy = θy2
Dans ces conditions, (2.16)
Après avoir résolu le système, on obtient pour la matrice [B] la forme suivante :
(2.17)
Exemple :
10

La méthode des éléments finis
k11 =
k11 = = etc.
En ce qui concerne le calcul des contraintes, on sait du cours de Résistance des matériaux que dans le cas d’une poutre soumise à la flexion,
où (2.18)
Pour l’élément de poutre 2D (bidimensionnel), celui ci est la combinaison entre un élément de barre et un élément de poutre. Dans ce cas, la matrice de rigidité [K] sera :
(2.19)
2.4 Systèmes de coordonnées globals et locals
L’utilisateur définit la géométrie d’un modèle avec éléments finis dans un système de coordonnées global XYZ. Le logiciel génère typiquement une matrice de rigidité pour un élément quelconque dans un système local de coordonnées xyz et le convertit dans le système global pour réaliser l’assemblage des éléments. Le système global et local peuvent être parallèles ou coïncidents, cas dans lesquels les composantes des déplacements nodaux sont identiques dans les deux systèmes.
2.5 Propriétés de la matrice de rigidité
Les matrices de rigidité [k] (dans le système local) et [K] (dans le système global) sont symétriques. Cela reste youjours vrai pour tout élément de structure où il existe une relation linéare entre les charges appliquées et les déformations résultantes.
11

La méthode des éléments finis
Chaque coefficient de la diagonale des matrices [k], respectivement [K] sont positifs. Imaginons qu’un certain degré de liberté i serait le seul degré de liberté non nul ; le chargement associé à ce degré est fi = k11i. Du fait que di et ri sont positifs dans la même direction, une diagonale négative des coefficients kii voudrait dire qu’un chargement et son déplacement correspondant seraient orientés de façon opposée, fait qui en réalité est déraisonnable.
Une structure qui est soit sans supports soit avec des supports inadéquats a une matrice de rigidité [K] singulière et dans ce cas le logiciel d’éléments finis ne peut pas être capable de résoudre l’équation {F} = [K]{}. Pour prévenir la singularité, les supports doivent être suffisamment nombreux pour prévenir tous les mouvements de corps rigide possibles.
COURS 3
DÉDUCTION DE LA MATRICE DE RIGIDITÉ POUR LES BARRES ARTICULÉES
3.1 Transformation des coordonnées du système local en système global
Dans la figure 3.1 est représenté un exemple typique de barre articulée ainsi que les deux repères de coordonnées, local xOz et global XOZ. Les déplacements dans le système local sont u1 et u2 et dans le système global U1, W1 et U2, W2. L’angle est considéré l’angle entre l’axe X et la direction positive de la barre articulée 1-2.
Fig.3.1 Système local et global de coordonnées
Les déplacements dans le système local xOy peut être exprimé en fonction des déplacements globals.
(3.1)
ou sous forme matricéelle :
(3.2)
ou [T] s’appelle matrice de transformation du système local dans celui global et :
,
12
1
2
1’
2’
x
z
X
Z
W2
W1
U1
U2
u1
u2
déformée
initiale

La méthode des éléments finis
L représentant la longueur de l’élément de barre articulée.
3.2 Transformation des forces du système local en système global
On considère la barre articulée de la figure 3.2 soumise dans le système local par les forces f1 et f2 appliquées dans les noeuds 1 et 2 dans le système local d’axes de coordonnées. Les composantes de ces forces dans le système global seront :
(3.3)
Fig.3.2 Forces nodales dans le système local et global d’axes de coordonnées
Sous forme matricéelle, les relations 3.3 peuvent être écrites sous la forme :
(3.4)
ou bien :
(3.5)
3.3 Déduction de la matrice de rigidité d’un élément de barre articulée dans le système global d’axes
En partant de l’équation (3.5) on aura, pour le système global d’axes :
(3.6)
où :
- {Fe} = vecteur des forces nodales dans le système global d’axes ;- {fe} = vecteur des forces nodales dans le système local d’axes ;- [Ke] = matrice de rigidité dans le système global d’axes ;
13
1
2
x
z
X
Z
U1
Fx2
f2
f1
Fz2
Fx1
Fz1

La méthode des éléments finis
- [ke] = matrice de rigidité dans le système local d’axes ;- {Ue} = vecteur des déplacements nodaux dans le système global d’axes ;- {ue} = vecteur des déplacements nodaux dans le système local d’axes.
(3.7)où c = cos et s = sin .
La matrice de rigidité dans le système global d’axes est symétrique, singulière et, comme on peut facilement remarquer, les éléments de la diagonale principale sont positifs.
3.4 Application
Pour le système de barres articulées de la figure ci-dessous déterminez :- les efforts et les contraintes dans chaque barre ;- les déplacements nodaux.
On considère connues E, F, ℓ et A. Application numérique : E = 2105 MPa, A = 200 mm2, ℓ = 1 m et F = 10 kN.
Premier pas : numérotation des noeuds et des éléments Deuxième pas : application des forces nodales et des déplacements nodaux.
Troisième pas : complètement du tableau
Barre Noeuds e [o] cos e
sin e c2 s2 csℓe EAe
14
9F
6Fℓ, EA
ℓ , EAℓ , EA
45o 135o
12
3
1
2 3
U1
W1
U3
W3
U2
W2
F1
F2 F3
F4
F5
F6

La méthode des éléments finis
i j
1 1 2 0 1 0 1 0 0 ℓ EA
EA
2 1 3 452
2 EA
3 2 3 135 -2
2 - EA
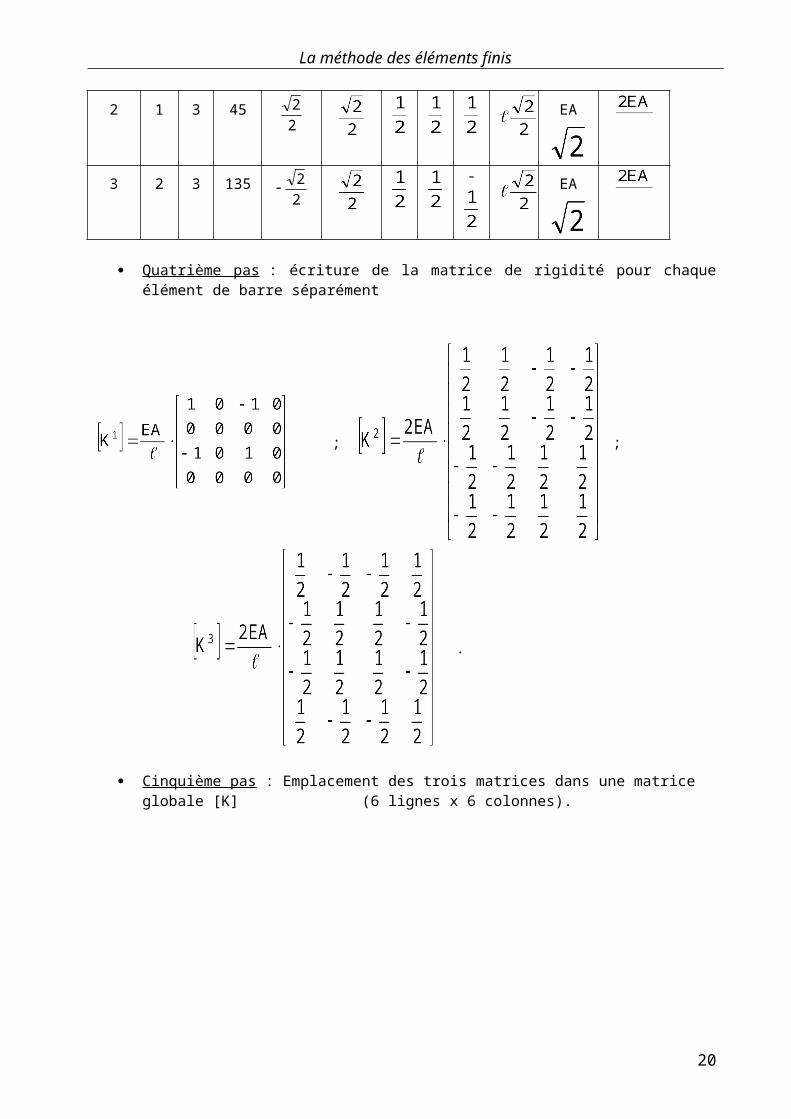
Quatrième pas : écriture de la matrice de rigidité pour chaque élément de barre séparément
; ;
.
Cinquième pas : Emplacement des trois matrices dans une matrice globale [K] (6 lignes x 6 colonnes).
[K1] = [K2] =
15

La méthode des éléments finis
[K3] =
Sixième pas : Assamblage des matrices de rigidité [Ki] dans la matrice globale de rigidité
Septième pas : écriture de la relation fondamentale de la MEF, {F} = [K]{} et détermination des déplacements nodaux et des forces nodales :
On peut facilement remarquer que là où on connait les forces nodales on ne connait pas les déplacements nodaux et inversement, là où on connait les déplacements nodaux, les forces nodales sont inconnues. En choisissant les lignes 3 et 6 on peut facilement calculer les déplacements nodaux :
En ce qui concerne les forces nodales on prend comme équations les lignes 1, 2, 4 et 5. On aura dans ce cas :
16

La méthode des éléments finis
.
L’allongement ℓ pour un élément quelconque i - j se calcule avec la formule :
ℓij = (Uj – Ui) cos - (Wj – Wi) sin (3.8)
Huitième pas : calcul des efforts dans chaque élément de barre.
Les efforts dans un élément de barre articulée i - j se calculent avec la formule :
(3.9)
En appliquant la relation (3.9) on aura donc les efforts dans les barres 1-2, 1-3 et 2-3
Les contraintes dans chaque élément de barre se calculent avec la formule : , donc :
17

La méthode des éléments finis
COURS 4
DÉDUCTION DE LA MATRICE DE RIGIDITÉ POUR LES POUTRES
4.1 Transformation des coordonnées du système local en système global
Dans la figure 4.1 est représenté un exemple typique de poutre ainsi que les deux repères de coordonnées, local xOz et global XOZ. Les déplacements dans le système local sont u1 et u2 et dans le système global U1, W1 et U2, W2. Les rotations 1 et 2 sont les mêmes dans les deux systèmes de coordonnées. L’angle est considéré l’angle entre l’axe X et la direction positive de la poutre 1-2.
Fig.4.1 Système local et global de coordonnées
Les déplacements dans le système local xOy peut être exprimé en fonction des déplacements globals.
(4.1)
ou sous forme matricéelle :
(4.2)
pour le noeud 1.De façon similaire, pour le noeud 2 on aura :
18
1
2
1’
2’
x
z
X
Z
W2
W1
U1
U2
u1
u2
déformée
initiale
12
w1
w2

La méthode des éléments finis
(4.3)
Sachant que :
{ue} = [Te]{Ue} (4.4)
il en résulte :
(4.5)
La relation (4.5) représente la transformation des déplacements du système local en celui global, par l’intermédiaire de la matrice de transformation [Te].
4.2 Déduction de la matrice de rigidité et de celle des forces nodales pour un élément de poutre dans le système global d’axes
L’expression de la matrice de rigidité attachée à un élément de poutre [Ke] dans le système global d’axes aura la forme :
(4.6)
Les forces nodales seront données par l’expression :
(4.7)
où :
- {Fe} = vecteur des forces nodales dans le système global d’axes ;- {fe} = vecteur des forces nodales dans le système local d’axes ;- [Ke] = matrice de rigidité dans le système global d’axes ;- [ke] = matrice de rigidité dans le système local d’axes ;- {Ue} = vecteur des déplacements nodaux dans le système global d’axes ;- {ue} = vecteur des déplacements nodaux dans le système local d’axes.
4.3 Application 1
Pour la poutre de section circulaire de diamètre d (fig.4.2), calculez le déplacement transversal du noeud 2 ainsi que les réactions V1, M1 et V3. Tracez les diagrammes T et M et déterminez la contrainte maximale suportée par la poutre. Application numérique : L = 0,8 m, E = 21104
MPa, F = 4 kN, d = 60 mm.
On part de l’expression de la matrice de rigidité pour un élément de poutre dans un système local d’axes de coordonnées :
19
F
L L1 2
3
V1
M1
V3
d
La méthode des éléments finis
On particularise cette expression pour chacune des deux régions 1-2 respectivement 2-3, en négligeant les lignes et les colonnes 1 et 4, à cause de l’absence des forces axiales :
Donc, et
En assemblant les deux matrices de rigidité, on aura :
En écrivant l’équation fondamentale de la MEF, on aura :
20

La méthode des éléments finis
et,
Par l’addition des deux relations, il en résulte :
En choisissant les lignes et les colonnes 3, 4 et 6, on obtiendra :
, d’où il en résulte : W2 = , 2 = et
2 = . En remplaçant ces trois valeurs dans le système matricéel, écrit pour les lignes et
les colonnes 1, 2 et 5, on obtiendra :
, d’où il en résulte : , et
.
Les diagrammes T et M sont présentés ci-dessous :
21
F
L L1 2
3
V1
M1
V3
FL16
5
FL8
3
T
M
F16
11
F16
5

La méthode des éléments finis
En ce qui concerne la contrainte maximale, en appliquant la relation de Navier, on obtiendra :
COURS 5
PROBLÈMES PLANS
5.1 Relations contrainte-déformation-température
Par définition, un corps plan est plat et d’épaisseur constante. Dans le cas d’un matériau linéaire élastique et isotrope, la relation entre les déformations et les contraintes, où l’on tient compte de l’effet de la température est :
(5.1)
ou bien sous forme restrainte:
(5.2)
où E représente le module d’Young, G - le module de cisaillement, - le coefficient de Poisson
(G = ), - coefficient de dillatation thermique linéaire et T – la variation de
température.Si l’équation (5.2) est écrite en fonction de , on aura :
, avec (5.3)
et
22

La méthode des éléments finis
pour l’état plan de contrainte.Dans le cas d’un état plan de déformation, le changement de l’épaisseur est empêché. La
matrice [E] aura dans ce cas la forme :
(5.4)
Le vecteur {0} aura l’expression : (4.5)
Comme un exemple d’état plan de déformation, si une plaque plane est fléchie de telle manière qu’elle devienne un cylindre avec y son axe, les sections transversales dans des plans normaux à l’axe y se trouvent dans un état plan de déformation. Les contraintes sont indépendantes de y dans l’état plan de contrainte. Les contraintes dans les problèmes d’état plan de contrainte peuvent être appellées contraintes de membrane.
5.2 Relations déformations-déplacements
La déformation représente la variation des dimensions géométriques d’un corps dans le voisinage d’un point et peuvent être déformations linéaires ou angulaires.
Le changement de la position de certains points d’un corps au cours de sa déformation s’appelle déplacement. Les déplacements peuvent être linéaires ou angulaires.
Fig.5.1 Rectangle à dimensions incrémentales soumis à la traction suivant les axes x et z et au cisaillement
Les relations qui existent entre les déformations et les déplacements sont :
(5.6)
Cependant, généralement aussi bien les déplacements suivant l’axe Ox et suivant l’axe Oz sont tous les deux des fonctions de deux variables, u = u(x,z) et w = w(x,z). C’est pourquoi on doit utiliser les dérivées partielles. Dans ce cas, les relations (5.6) deviennent :
(5.7)
ou bien :
23
x
z
u
x
z
wx
z
w
u
z
u
x
w

La méthode des éléments finis
= u (5.8)
Dans la MEF, les déplacements sont interpolés à partir des déplacements nodaux, comme ce qui suit :
u = N (5.9)
où Ni sont polynômes d’interpolation et N (ou bien [N]) s’appelle matrice de la fonction de forme. A partir des relations (5.8) et (5.9) on peut écrire :
= N = B , où B = N (ou bien : {} = [B]{}). (5.10)
La matrice [B] s’appelle matrice déformation-déplacement.5.3 Formule générale de la matrice de rigidité
En partant de l’expression de l’énergie de déformation spécifique (énergie raportée à
l’élément de volume) pour un matériau élastique, , on aura :
(5.11)
Donc :
sera la formule générale de la matrice de rigidité d’un élément quelconque.
Cette formule a un degré de généralité pouvant être appliquée pour n’importe quel type d’élément fini. Pour une matrice [E] des coefficients élastiques donnée, la nature de la matrice de rigidité [K] dépend exclusivement de la matrice [B] qui dépend à son tour de la matrice [N] des fonctions de forme. Dans d’autres termes, le comportement d’un élément est gouverné par ses fonctions de forme.
5.4 Présentation de l’élément CST (Constant Strain Triangle)
L’élément CST est peut être le plus simple et l’un des premiers types d’éléments finis utilisés. Cet élément est présenté dans la figure 5.2.
24
z, w
x, u
1
2
3u3
w3
w2
u2
u1
w1

La méthode des éléments finis
Fig.5.2 Elément CST
En terme de coordonnées généralisées i le champ de déplacements est donné par:
(5.12)
En utilisant les équations (5.7) et (5.12), on aura:
(5.13)
L’élément est appellé CST du fait que les déformations ne varient pas dans l’intérieur de cet élément. Cet élément s’appelle aussi “triangle linéaire” du fait que son champ de déplacement est linéaire en x et z. Les côtés du triangle restent droits (ne fléchissent pas) lorsque l’élément se déforme.
Le champ de contrainte obtenu à partir des fonctions de forme est présenté dans la relation (5.14).
Dans cette relation xij = xi – xj et zij = zi - zj, 2A = .
(5.14)
où xi et zi sont les coordonnées nodales (i = 1, 2, 3), x ij = xi – xj, zij = zi - zj, 2A
représentant le double de l’aire d’un triangle, où A = . Les noeuds
peuvent être décrits d’une façon arbitraire, la seule exception étant le fait que la séquence 1-2-3 doit être parcourue dans le sens trigonométrique (anti-horaire).
La matrice de rigidité pour cet élément sera donnée par:
(5.15)
où t est l’épaisseur de l’élément.L’élément CST offre de bons résultats seulement dans les régions du modèle
d’élément fini dans lesquelles le gradient des déformations est petit. Dans les autres cas, l’élément CST n’est pas souhaitable à être utilisé. C’est le cas de la flexion pure (fig.5.3).
25x
F
Fℓ
5ℓ
xFℓ
5ℓ

La méthode des éléments finis
Fig. 5.3 Contraintes x au long de l’axe Ox et déformations dans le cas d’une flexion pure
Comme on le sait bien, dans le cas d’un problème de flexion pure, les contraintes sur l’axe Ox devraient être nulles, car Ox est axe neutre. Par contre, comme on peut facilement voir dans la figure 5.3, le modèle d’élément fini affiche la contrainte x sous forme d’onde rectangulaire. L’inhabilité de l’élément CST de représenter une déformation x qui varie linéairement par rapport à Oz représente un grand désavantage. Un autre désavantage de ce type d’élément est que le déplacement w2 introduit un effet parasite de cisaillement, effet qui, normalement dans une flexion pure, ne devrait jamais apparaitre.
5.5 Présentation de l’élément LST (linear strain triangle)
L’élément LST est représenté dans la figure 5.4. Il présente, à part les trois noeuds 1, 2 et 3, des noeuds supplémentaires situés au milieu de chaque côté du triangle. Les degrés de liberté sont en nombre de 12 (deux degrés de liberté ui, wi pour chaque noeud, i = 1...6).
En terme de coordonnées généralisées i, le champ de déplacement est décrit par:
(5.16)
et respectivement, pour le champ de déformations:
(5.17)
Fig.5.4 Elément de type LST et Fig.5.5 Mode de déplacement associé au
26
z,w
a x,u
a
1 2
3
u2
w2
x, u
z, w
12
3
4
56
u1
u4
u2
u5
u3
u6
w2
w3
w6
w1
w4
w5
w2

La méthode des éléments finis
ses 12 degrés de liberté degré de liberté w2 du noeud 2
Le champ de déformation peut varier de façon linéaire par rapport à l’axe Ox ou Oz dans l’intérieur de l’élément. Cet élément est dénommé aussi “triangle quadratique”, parce que son champ de déplacement est quadratique en x et z. Les côtés de cet élément se déforment en courbes quadratiques au moment où un seul degré de liberté (par exemple w2) est activé. L’élément LST a toutes les capacités de l’élément CST et même plus. Si le problème antérieur (fig.5.3) est résolu en utilisant des éléments LST, on obtiendra de résultats correscts pour le champ de déplacements ainsi que pour le champ de contraintes.
27

La méthode des éléments finis
COURS 6
6.1 Elément bilinéaire quadratique (élément rectangulaire à quatre noeuds)(Q4)
L’élément Q4 est un quadrilatère (rectangle) à quatre noeuds. Ses degrés de liberté sont présentés dans la figure 6.1.
Fig.6.1 Elément quadrilatère bilinéaire
En termes de coordonnées généralisées i, le champ de déplacement est donné par:
(6.1)
Le terme “bilinéaire” vient du fait que la forme des expressions pour u et w est le produit de deux polynômes linéaires (c1 + c2x)(c3 + c4z) où ci sont des constantes. Il y déformation sera:
(6.2)
Le champ de déformation montre que la quantité x est indépendante de x, ce qui veut dire que l’élément Q4 ne peut pas modeler de façon exacte une poutre encastrée sollicitée par une force transversale, là où la déformation axiale varie de façon linéaire par rapport à l’axe Ox. (fig. 6.2). En plus, l’élément Q4 ne peut pas modeler un état de flexion pure, malgré son habileté de représenter une déformation x qui varie linéairement par rapport à l’axe Oz.
a b c
Fig. 6.2 a) Simulation de la flexion. b) Mode de déformation correcte en flexion pure. c) Mode de déformation de l’élément bilinéaire quadratique
Tous les côtés de l’élément Q4 se déforment sous forme de lignes droites. En conséquence les angles droits dans l’intérieur de l’élément ne restent pas droits suite à la déformation, donc les déformations de cisaillement (glissements) apparaissent partout dans l’intérieur de l’élément exceptant au long de l’ace Oz. Comme on le sait bien, dans la flexion pure xz = 0; en conclusion, l’élément Q4
28
x
F
F
1 2
3 4
x, u
z, w
u1u2
u3u4
a a
b
b
w1 w2
w3 w4
M M M M
(allongement unitaire)

La méthode des éléments finis
utilisé dans la modélisation de la flexion, introduit un effet parasite de déformation de cisaillement.
Les fonctions de forme ont les expressions suivantes:
(6.3)
Fig. 6.3 Fonction de forme N2 de l’élément bilinéaire quadrilatéral
Le champ de déformation sera:
(6.4)
En utilisant un maillage fin, l’élément Q4 travaille mieux que l’élément CST.
6.2 Elément quadrilatéral quadratique (élément rectangulaire à 8 noeuds) (Q8)
L’élement Q8 est présenté dans la figure 6.4. En terme de coordonnées généralisées i est donné par:
(6.5)
Fig. 6.4 Elément quadratique quadrilatéral
29
1
1 2
34
x
z
Le noeud 2 a les coordonnées x2 = a et z2 = - bDonc, N2 = 1 et tous les autres Ni (i = 1, 3, 4) = 0.
w21 2
3 4
x, u
z, w
u1u2
u3u4
a a
b
b
w1
w3 w4
8
5
6
7
1
1 2
34
x
z
1
1 2
34
x
z
6

La méthode des éléments finis
Fig. 6.5 Fonctions de forme N2 et N6
Sous une forme compacte, le champ de déplacement est décrit par:
(6.6)
où, par exemple,
(6.7)
Dans les relations (6.7), .
Comme exemple, si on prend le côté x = a, on constate, à partir des équations (6.5) ou (6.7) que celui-ci se déforme sous forme de parabole au moment où n’importe quel degré de liberté appartenant à ce côté est activé (non-nul).
Le champ de déformation sera:
(6.8)
Chacun de ces trois déformations contient tous les termes linéaires at quelque fois quadratiques. En conclusion, l’élément Q8 peut représenter exactement tous les états de déformation constante et des états de flexion pure seulement dans le cas où il est rectangulaire.
6.3 Exemple comparatifs
Tous les types d’éléments plans discutés antérieurement peuvent être comparés en les utilisant dans la résolution d’un problème. Il faut faire attention, car un seul problème n’est pas édificateur: certains types d’éléments sont supérieurs dans un problème A, mais inférieurs dans un autre problème B.
Le problème-test choisi est une barre encastrée d’épaisseur unité et sollicitée par un effort tranchant F = 20. On connait E = 104 et = 0,3.
30
2
B
120
10
C

La méthode des éléments finis
En appliquant la formule utilisée dans la Résistance des matériaux, on aura:
et
En utilisant cinq types différents d’éléments finis (BEAM2D, CST, LST, Q4 et Q8), dans le Tableau 6.1 sont présentées les valeurs des contraintes maximum (dans l’encastrement) et des flèches maximum (dans l’extrémité libre de la poutre)
Tableau 6.1
Discrétisation Type d’élémentfini utilisé
xB wc
BEAM 2D 300 1,031
CST 71 0,264
LST 254 0,987
LST 250 0,924
Q4 200 0,693
Q4 190 0,502
31

La méthode des éléments finis
Q8 300 1,028
Q8 278 1,035
Conclusion
Comme c’était évident, l’élément CST introduit les plus grandes erreurs par rapport au résultat exact. Les éléments Q4 sont meilleurs que le CST mais pas les meilleurs à être utilisés lors d’une discrétisation. Les éléments LST donnent de bons résultats en ce qui concerne les flèches mais pas en ce qui concerne les contraintes. Les résultats les plus conformes à la réalité sont donnés par l’élément Q8 et même Q6 (par rapport à l’élément Q4, celui ci permet au côtés de fléchir, de devenir courbes et peut mieux modeler la flexion d’une barre).
6.4 Calcul des contraintes. Autres remarques
Après avoir calculé les déplacements nodaux les logiciels calculent les contraintes en utilisant la relation:
(6.9)
Cette équation est appliquée pour chaque élément et non pas sous une forme globale. Généralement, [B] est en fonction des coordonnées, donc l’utilisateur doit décider dans quelle partie (région) de l’élément la contrainte doit-elle être calculée. Les contraintes ont la tendance d’être plus précises, plus exactes plûtôt dans l’intérieur de l’élément que sur sa frontière. C’est pourquoi il est souhaitable de calculer les valeurs de ces contraintes dans certains points situés dans l’intérieur de l’élément et puis de les extrapoler pour obtenir les contraintes sur les frontières de l’élément.
Une méthode alternative pour le calcul des contraintes n’utilise pas le calcul conventionnel . Au lieu de cette relation, le logiciel calcule les forces nodales de l’élément , relation dans laquelle le vecteur des déplacements nodaux {} sont disponibles de
la matrice {}, suite à la résolution du système {F} = [K] {}. Puis, en utilisant la méthode des moindres carrés on détermine le champ de contraintes d’un élément nécessaire à équilibrer le vecteur {f}. Cette méthode alternative est plus compliquée que la méthode conventionnelle (classique) mais présente des bénéfices très importants. Premièrement, il y a une meilleure précision lorsque les chargements (plûtôt que les déplacements non-nuls) sont prescrits. Par rapport à la méthode conventionnelle, les contraintes sont au moins aussi précis que les déplacements.
Quelques contraintes utiles sont des invariants. Cela veut dire que les valeurs de ces contraintes sont les mêmes quel que soit le système d’axes de coordonnées. Une telle quantité invariante est la contrainte équivalente Von Mises:
(6.10)
où 1, 2, 3 sont les contraintes principales dans le point en question (1 > 2 > 3).Comme option, dans la plupart des logiciels d’analyse par éléments finis, on peut calculer
les valeurs moyennes des contraintes dans les éléments situés dans le voisinage d’un noeud. Cependant, il y a de bonnes raisons pour ne pas calculer toujours la moyenne des contraintes dans les noeuds. Deux parties reliées par un ajustement par frettage ont des contraintes
32

La méthode des éléments finis
normales différentes dans des directions tangentes à l’interface. Une discontinuité de l’épaisseur ou du module d’élasticité d’un matériau cause aussi des discontinuités des contraintes (fig.6.6).
Fig.6.6 Exemples de situations dans lesquelles les contraintes équivalentes ne devraient pas être calculées comme moyenne de plusieurs contraintes
COURS 7
ELEMENTS ISOPARAMETRIQUES
7.1 Formulation isoparamétrique
La formulation isoparamétrique permet d’avoir par exemple des éléments non-rectangulaires, des éléments avec des côtés courbes ou des éléments présentant des singularités utilisés dans la mécanique de la rupture.
Nous allons discuter par exemple l’élément quadrilatéral plan à quatre noeuds.
Fig.7.1 Elément isoparamétrique à quatre noeuds
33
E1 E2
A
B
x
zs
n
x
z
X, u
Z, w
=
= 1
=
= - 1
= 1
= - 1
=
=
12
3
4

La méthode des éléments finis
Un système de coordonnées auxiliaire doit être introduit afin qu’un quadrilatère puisse être non-rectangulaire. Ce système dénommé - s’appelle système naturel de coordonnées. Son origine, dans le système de coordonnées XZ est située au milieu des coordonnés des noeuds 1- 4. Dans le système de coordonnées naturel -, les côtés des éléments sont toujours définis par = 1 et = 1, indiféremment de la forme ou des dimensions physiques de l’élément ou indépendamment de son orientation dans le système global d’axes de coordonnées XZ. Généralement les axes et ne sont pas orthogonales et n’ont pas une orientation particulière par rapport au système d’axes XZ.
Les coordonnées d’un point situé à l’intérieur de cet élément sont définies par la relation:
(7.1)
dans laquelle Xi et Zi sont les coordonnées des noeuds situés dans les quatre coins et les forctions d’interpolation (ou fonctions de forme) sont données par:
(7.2)
Ces fonctions Ni sont similaires à celles présentées dans la relation (6.3). En connaissant les coordonnées et d’un point, on peut utiliser les relations (7.1) pour
calculer les coordonnées X et Z. Les déplacements d’un point quelconque sont interpolés à partir des degrés de liberté nodaux en utilisant les mêmes fonctions de forme:
(7.3)
Les déplacements u et w sont parallèles aux axes X et Z, mais pas aux axes et . Le terme “isoparamétrique” dérive du fait que les mêmes fonctions de forme Ni sont utilisées
pour l’interpolation aussi bien des coordonnées ques des déplacements. Pour l’écriture de la matrice [B] (déformation-déplacement) il faut établir la relation entre les
gradients dans les deux systèmes de coordonnées. Considérons l’un de ces gradients la
déformation x = .
On ne peut pas écrire immédiatement le résultat parce que u est défini comme un fonction de et et non pas en fonction de X et Z. Dans ce cas on commence par différentier par rapport à et en utilisant la règle des chaines:
(7.4)
où J s’appelle la matrice de Jacobi (le Jacobien). Les coefficients de la matrice J sont obtenus à partir de la relation (7.1);
(7.5)
L’équation (7.4) peut être résolue ainsi:
(7.6)
où sont les coefficients de la première ligne de J-1 et:
(7.7)
34

La méthode des éléments finis
Les déformations z et xz s’obtiennent de la même façon.Dans ces conditions, la matrice de rigidité sera écrite sous la forme:
(7.8)
où t représente l’épaisseur de l’élément et J le déterminant de J. J est en fonction des
coordonnées, mais pour un rectangle ou un parallélogramme il est constant et a la valeur de
, où A est l’aire du rectangle ou du parallélogramme et “4” est l’aire en coordonnées -.D’autres éléments isoparamétriques plans ont plus de noeuds, d’où il en résulte plus de
fonctions de forme Ni et plus de colonnes dans la matrice [B]. Par contre, le Jacobien restera toujours 2 x 2 (deux lignes et deux colonnes). Pour les éléments type Solide, le Jacobien sera 3 x 3 et la matrice [B] aura six lignes.
7.2 Quadrature de Gauss. Eléments isoparamétriques
L’intégration (7.8) peut être faite analytiquement ou bien numériquement. La quadrature de Gauss est une forme utilisée d’intégration numérique.
Pour commencer l’explication de la quadrature Gauss, on considère tout d’abord des problèmes uni-dimensionnels sans référence particulière pour la MEF. La quadrature de Gauss évalue l’intégrale d’une fonction quelconque sous la forme d’une somme ayant un nombre fini de termes:
(7.9)
où Wi représente le “poids” et i la valeur = () dans une location particulière dénommée souvent point Gauss.
La figure 7.2 offre des exemples de ce processus (quadrature de Gauss d’ordre 1, 2 et 3). Les points Gauss sont situés à = 0, = a et respectivement = 0, = b.
Si = () est un polynôme, l’utilisation de n points Gauss conduit à la valeur excate de l’intégrale si a le degré (2n-1) ou au dessous de celui-ci. Ainsi, la forme = a + b sera exactement intégrée par un seul point Gauss, la forme = a + b + c2, par deux points Gauss et ainsi de suite. Si n’est pas un polynôme mais le rapport entre deux polynômes, la quadrature de Gauss nous mène à un résultat approximatif. La précision du résultat implique un grand nombre de points Gauss.
35
I =
- 1 10
= ()
d)(I1
1
- 1 10
1
I = 21
- 1 10
a a
1 2
a =
I = 1 + 2
b b
- 1 10
b =
1 2 3

La méthode des éléments finis
Fig.7.2 Intégration de la fonction = (x) en utilisant la quadrature de Gauss d’ordre 1, 2 et 3
Rappel méthodes numériques pour la méthode de quadrature de Gauss
Soit [a, b] R et n N. On note par:
(Ln s’appelle polynôme Legendre d’ordre n) et:a) Ln est un polynôme d’ordre n;b) Ln a des racines distinctes x1, x2,..., xn situées dans l’intervalle [a, b];
c) pour tout polynôme C de degré (n-1).
Soit et
Soit f: [a, b] R une fonction continue. On dénomme “formule de quadrature de Gauss d’ordre n”, attachée à la fonction f, l’expression:
.
Pour tout polynôme P de degré inférieur à (2n -1), on aura:
,
c’est-à-dire que la formule de quadrature de Gauss est exacte d’ordre (2n -1).
Cas particulier: n = 2, a = -1 et b = 1.
Dans ce cas,
L2(x) = 0 a comme racines: et:
Donc, pour une fonction f continue sur l’intervalle [-1, 1], la formule de quadrature de Gauss d’ordre 2 est:
Cas particulier: n = 3, a = -1 et b = 1.
36

La méthode des éléments finis
Dans ce cas,
L3(x) = 0 a comme racines: et:
, , .
Donc, pour une fonction continue sur l’intervalle [-1, 1], la formule de quadrature de Gauss d’ordre 3 est donnée par:
37

La méthode des éléments finis
COURS 8
ERREURS DANS L’ANALYSE PAR MEF
8.1 Erreurs usuelles
Une matrice de rigidité globale [K] peut être singulière au cas où: les propriétés du matériau (modules d’élasticité) sont nulles; un ou plusieurs noeuds ne sont pas connectés à un élément quelconque; le manque de supports, ou bien les supports sont insuffisants pour prévenir des mouvements de corps rigide; un mécanisme est créé du fait que le modèle (une partie du modèle) est insuffisamment bloquée; il y a de grandes différences en ce qui concerne les rigidités; une partie de la structure a flambé; dans une analyse non-linéaire les supports ou les connexions ont atteint une rigidité nulle, donc une partie de la structure est insuffisamment bloquée.Une matrice [K] singulière déclenche un message d’erreur et arrête le processus
d’analyse numérique. Si l’execution s’arrête ou l’execution continue mais les résultats sont bizarres il est clair que quelque chose est louche et dans ce cas une recherche de l’erreur est absolument nécessaire.
Il est plus dangeureux si il existe des erreurs qui puissent conduire à des résultats plausibles, mais pas précis, exacts. Dans cette catégorie on peut énumérer:
une utilisation erronnée des types d’éléments; par exemple, les éléments de coque (SHELL) sont utilisés à la place des éléments de type “SOLIDE” ou bien des éléments de symétrie axiale à la place des éléments plans (PLANE elements);
les appuis (supports) sont mal disposés en direction, type ou location; les chargements sont mal disposés en direction, type, location ou grandeur; autres données peuvent être incorrectes; par exemple une utilisation incorrecte des
unités de mesure (vitesse angulaire en rot/sec au lieu de rad/sec); un élément peut être défini plusieurs fois; la duplication est très difficile à détecter à
cause du fait que il est très difficile d’observer l’erreur lors du traçage; une connexion peut être sans aucune signification du point de vue physique.
38

La méthode des éléments finis
8.2 Vérification du modèle. Erreurs détectées
Vérification faite par l’analyste (l’utilisateur) Vérification automatique faite par le logiciel vérification manuelle de la location de certains noeuds;
un certain node n’est pas connecté à un élément quelconque;
vérification de l’introduction des propriétés des matériaux;
les noeuds sont tout près l’un de l’autre ou coïncident mais ne sont pas connectés;
vérification de l’introduction de l’aire des sections transversales pour les poutres;
les éléments partagent un noeud mais n’utilisent pas le même set de degrés de liberté que celui-ci;
affichage de la frontière du modèle; au cas où une partie du contour a une forme de “fissure” dans un matériau, quelques noeuds sont soit adjacents soit coïncident.
le coefficient de Poisson n’est pas dans l’intervalle (0; 0,5); un test analogue peut détecter des propriétés impossibles d’un matériau orthotrope; un élément à quatre noeuds est trop déformé; ses noeuds sont éloignés au-dessus et au-dessous du plan médian; l’angle dièdre entre éléments triangulaires ou quadrilatères est trop éloigné de 180o.
8.3 Critique des résultats obtenus par MEF
Au cours d’une post-procession les déplacements sont ceux qui doivent être examinés premièrement. D’habitude les logiciels tracent seulement des lignes droites entre les noeuds, de telle manière que les formes courbes supposées être des éléments déformés des poutres, les bords des éléments de plaque ou de coque, ne sont pas visibles.
Au cas où une symétrie est anticipée cet aspect serait visible dans le champ de déplacements. Les déformations produites par une variation de température sont tracés par le logiciel seulement si la configuration non-déformée existe à une température de 0o.
Les réactions dans les supports doivent être examinées afin de vérifier si elles satisfaisent les équations d’équilibre statique, par exemple de vérifier si la somme des composantes des réactions sur la direction Ox équilibre les forces appliquées sur cette direction. A noter que toutes les réactions doivent être rapportées au même système de coordonnées.
Avant d’examiner les résultats qui concernent les contraintes, avant de faire une évaluation, on doit se poser les questions suivantes :
est-ce qu’elles se référent aux systèmes globals ou locals d’axes ? au cas où le système d’axes est bien défini, comment ces axes sont-elles
orientées ? les contraintes résultantes sont-elles reportées (pae exemple celles dûes aux
moments résultants) ? dans les éléments de poutre, de plaque ou de coque, les contraintes peuvent rester
valides à la surface supérieure, moyenne ou inférieure ? est-ce que les contraintes sont médiées dans les noeuds ? ceci serait incorrect au cas où le système d’axes de coordonnées ne s’adapte pas
ou s’il existe des discontinuités d’épaisseurs ou des discontinuités des propriétés du matériau ;
Quelques caractéristiques qui puissent définir un champ de contrainte précis, exact sont présentés ci-dessous :
le contour des contraintes doit être normal à un plan de symmétrie réfléchissant ; sur une frontière libre (sans chargements), une des contraintes principales doit être
nulle ; sur une frontière chargée par une pression p, une des contraintes principales doit
être ˝- p ˝ ; les trajectoires des contraintes principales doivent être normales ou tangentes aux
frontières libres, à celles sollicitées par une pression p ;
39

La méthode des éléments finis
dans les problèmes de symmétrie axiale, les contraintes normales - radiales ou circonférentielles doivent être égales sur l’axe de révolution ;
le rapprochement, l’exactitude des contours des contraintes est un autre guide ; au cas où les contours des contraintes ont des incréments égaux entre eux, les éléments qui présentent une dispersion des contraintes doivent être plus raffinés que ceux qui ne présentent pas de dispersion ;
au cas où certains phénomènes tels que le flambement, les déformations dans le domaine plastique, l’action variable des efforts n’ont pas été pris en compte, une nouvelle analyse par MEF devrait être faite.
8.4 Concentrateurs de contraintes
La méthode des éléments finis n’est pas très bonne en ce qui concerne le calcul des contraintes dans les zones pourvues de concentrateurs de contraintes (trous, filets, rayons de raccordements etc. (fig.8.1)).
Fig. 8.1 Pièces à concentrateurs de contraintes Dans les zones pourvues de concentrateurs de contraintes un raffinement d’éléments est
absolument nécessaire. Quelquefois, un facteur de concentration de contrainte tabulé (K) peut être utilisé à partir des nomogrammes. L’éleveur des contraintes (par exemple le trou ou le rayon de raccordement) n’est pas modelé, mais la contrainte nominale et sa localisation est calculée à partir de la MEF. Si un FCC (facteur de concentration de contraintes) est tabulé pour une géométrie locale et le champ de contraintes est connu, afin d’obtenir le pic des contraintes on multiplie le facteur FCC à la contrainte nominale.
(t = épaisseur de la plaque)
Fig.8.2 Calcul du pic de la contrainte
40
b
FF
max nom=
d
A D
B CE
FF
E
C
A
B
D

La méthode des éléments finis
Fig.8.3 Modélisation d’une plaque carrée pourvue d’un trou circulaire
Supposons que pour la plaque modelée dans la figure 8.3 la contrainte dans le noeud E, calculée pour un maillage grossier (2x2), est de 221 MPa. Le même réseau local de discrétisation est intégré dans une bande de largeur égale à la plaque mais soumise à la traction.
Pour ce cas, le facteur de concentration de contraintes est connu. Dans le point E, pour le chargement appliqué on calcule la contrainte maximale et l’on obtient une valeur de 130 MPa par la méthode du FCC.
La valeur obtenue par la MEF est égale à 92,8 MPa. Le facteur de correction sera dans ce
cas : .
La valeur finale de la contrainte estimée sera donc : 2211,4 = 310 MPa. Pour un maillage plus fin (8x8), on obtient la valeur approximative de 337 MPa.
Malheureusement on ne peut pas calculer un facteur de concentration de contraintes pour chaque type de concentrateur. Dans ce cas il est absolument nécessaire une discrétisation très raffinnée afin de déterminer les pics des contraintes. Cependant, il n’est pas nécessaire de réviser et de réanalyser le modèle entier. Le raffinement peut être réalisé strictement à un niveau local. Cette technique s’appelle sous-modélisation.
COURS 9
ANALYSE THERMIQUE
9.1 Introduction. Equations fondamentales
Ce cours est dédié premièrement à l’analyse des contraintes. La température ainsi que les gradients de température sont une des causes importantes pour l’aparition des contraintes. Le terme « analyse thermique » signifie le calcul des températures dans l’intérieur d’un corps solide. Un dérivé (un sous-produit) du calcul de la température est l’information sur la magnitude et la direction du flux de chaleur dans l’intérieur du corps.
La chaleur est transférée vers un corps ou à partir d’un corps par convection ou radiation (fig.9.1).
Fig.9.1 Solide arbitraire, montrant les différents types de chargement thermique et les conditions sur la frontière
41
Taux prescrit du flux de chaleur à travers la frontière
Chaleur générée à l’intérieur du corps (par exemple dûe au courant électrique)
Température prescriteFlux de chaleur à travers la frontière dûe à la radiation (à l’intérieur ou à l’extérieur)
Flux de chaleur à travers la frontière dûe à la convection (à partir ou provenant d’un liquide)
Région isolée (pas de flux de chaleur à travers la frontière)

La méthode des éléments finis
Le flux de chaleur à travers la frontière est analogue à un chargement sur une surface dans l’analyse des contraintes. De plus, il peut y avoir une chaleur générée à l’intérieur d’un corps, produite par exemple par le courant électrique, par la chaleur produite par un diélectrique ou d’autres sources. Une source de chaleur interne distribuée est analogue à l’action des forces intérieures (efforts) dans l’analyse des contraintes. Dans certains points sur la frontière ou dans l’intérieur du corps, les températures peuvent être prescrites. Les températures prescrites sont analogues aux déplacements imposés.
Pour un régime stationnaire (indépendamment du temps), l’équation globale de l’élément fini sera dans ce cas:
[KT] {T} = {Q}(9.1)
où : KT dépend de la conductivité du matériau ;T est un vecteur des températures d’un point nodal du corps solide ;Q est un vecteur des chargements thermiques.
Au cas où elles sont présentes, les conditions sur la frontière de la convection et de la radiation influencent aussi bien les vecteurs KT et Q.
Comme on peut bien remarquer, il y a une ressemblance évidente entre la relation (9.1) et la relation de l’analyse des contraintes. Le vecteur inconnu est celui des températures nodales {T}. En effet, le même type d’éléments finis, même le même type de discrétisation peuvent être utilisés aussi bien pour l’analyse thermique que pour l’analyse des contraintes. En conclusion, ayant les températures nodales détérminées par éléments finis, on peut immédiatement utiliser ces températures pour l’analyse des contraintes, sans avoir aucun ennui de préparer un nouveau modèle.
La conductivité thermique et autres propriétés peuvent dépendre de la température si fortement de telle manière que la matrice [KT] puisse être regardée plûtôt comme une fonction de température qu’une matrice de constantes. Ainsi le problème devient non-linéaire. Ce problème est fondamentalement non-linéaire s’il y a transfert de chaleur par radiation, du fait que le flux de chaleur à travers le frontière dépend des différences des puissances de quatrième ordre des températures absolues, plûtôt que les différences de températures normales.
9.2 Équations du flux de chaleur
On considère un matériau isotropeet on s’imagine qu’il y a un gradient de température dans la direction x (fig.9.2, a). Conformément à l’équation de Fourier de la conduction de la chaleur, on a :
(9.2)
où fx est le flux de chaleur par unité de surface et k – la conductivité thermique. Le signe « moins » signifie que le flux de chaleur coule dans une direction opposée à la direction de l’acroissement de la température.
Matériau isotrope Matériau anisotrope
Fig.9.2 Les flux fx et fy affichés dans le sens négatif mais
42
fx
x
T
fx
x
T
fy

La méthode des éléments finis
dans une direction correcte si T/x > 0 et T/y = 0
Au cas où la matériau est anisotrope et x n’est pas une direction principale de matériau, la direction du flux de chaleur est généralement non-parallèle au gradient de température. Dans ce cas on aura :
(9.3)
où x, y et z sont les axes perpendiculaires (pas nécessairement cartésiennes) et - une matrice 3 x 3 des conductivités thermiques.
Au cas où x, y et z sont des axes principales de matériau, dans ce cas est une matrice diagonale. Dans le cas spécail d’isotropie la matrice sera réduite a une matrice diagonale avec 11 = 22 = 33 = k.
En considérant un élément de volume élémentaire, en écrivant l’équation de la balance énergétique (taux d’entrée – taux de sortie = taux d’accroissement), on obtient :
(9.4)où :
- qv = le taux de chaleur interne par unité de volume ;- c = chaleur spécifique ;- = densité de masse ;- t = temps.Si le corps est plan et s’il y a de transfert de chaleur par convection et/ou par radiation à
travers ses surfaces latérales plates, l’équation (9.4) doit être complétée par des termes en flux
(f = h (Tf – T)). Le problème devient stationnaire si . Donc, pour un cas spécial de
matériau isotrope, dans des conditions stationnaires, la relation (9.4) devient :
(9.5)
où est l’opérateur gradient. Dans deux dimensions , i et j étant les
vecteurs unités (verseurs) suivant les directions x et y. Si k est indépendant des coordonnées,
ou bien :
(9.6)
9.3 Nomenclature et unités
1 Joule = 1 Nm ; 1 Watt = 1 Nm/s ; 1 K = oC + 273,15
43

La méthode des éléments finis
9.4 Eléments finis dans l’analyse thermique
Le développement d’éléments finis et des équations matricéelles dans l’analyse thermique respecte les mêmes pas que ce qui doit être fait dans l’analyse des contraintes. Une matrice [kT] des conductivités associées à chaque élément peut être générée par une méthode directe pour des éléments très simples.
Considérons par exemple l’application de la méthode directe sur un élément de barre articulée. On considère dans ce cas une barre de section A constante dont les surfaces latérales sont isolées. Le taux de flux de chaleur est q = Af. Cette valeur du flux est constante du fait que l’aire de la section transversale est constante et la chaleur ne peut se propager qu’axialement. Les taux de flux de chaleur dans les deux noeuds q1 et q2 sont considérés positifs lorsqu’ils sont dirigés vers l’élément de barre. Donc, q1 = -q2, même si le gradient de température est positif ou négatif. Les températures nodales sont T1 et T2.
T1 > 0, T1 = 0 T1 = 0, T2 > 0
Fig. 9.3 Flux de chaleur nodaux dans une barre isolée sur les surfaces latérales et de section transversale constante A
Sous forme matricéelle, ces valeurs peuvent être écrites sous la forme :
Quantité Symbole Unité de mesureAire de la section transversale A m2
Chaleur spécifique c J/kgoCFlux de chaleur par unité d’aire f W/m2
Coefficient de transfert de chaleur h W/ m2oCConductivité thermique k W/ moCTaux de génération de chaleur interne par unité de volume
qv W/m3
Taux de flux de chaleur q = Af WAire de la surface S m2
Température T oC ou KTempérature du fluide adjacent à l’extérieur de la frontière extérieure
TfoC
oC/s
Temps t sDensité de masse kg/m3
Constante de Stefan Boltzmann 576010-8 W/m2K4
44
T1
L
1 2
T2
L
21

La méthode des éléments finis
(9.7)
où la matrice 2 x 2 est dénommée matrice des conductivités de l’élément est sera notée par [kT]. Cette matrice ressemble clairement à l’équation entre les forces nodales et les
déplacements nodaux pour l’élément de barre articulée .
La procédure formelle se fait exactement sous la même forme que celle utilisée pour l’obtention de la matrice de rigidité pour un élément fini, basée sur la méthode des déplacements.
On commence par une interpolation des températures pour un élément à partir des températures nodales Te.
(9.8)
Des fonctions de forme individuelle sont compatibles au type d’élément et peuvent être exactement les mêmes utilisées pour l’interpolation le champ de déplacements. En coordonnées cartésiennes, les gradients de températures pour un élément plan sont :
ou bien : T = BTe
(9.9)où :
B = N ou bien : [B] = [N] et
(9.10)
Pour un élément de barre [N] = , la matrice [] devient le scalaire k et la relation
(9.10) devient la matrice [kT] de la relation (9.7).
Remarques
Les éléments finis destinés à une analyse thermique sont assemblés sous la même forme que les éléments finis destinés à l’analyse des contraintes.
Par rapport à l’analyse des contraintes, l’analyse thermique est un problème de champ scalaire, du fait que la température T n’a pas une direction associée à elle-même.
45

La méthode des éléments finis
Une formulation E.F. – thermique n’a qu’un degré de liberté par noeud – la température nodale.
Un champ de température est continu dans l’intérieur des éléments et à travers les frontières inter-éléments.
Exceptant le cas du transfert de la température par radiation, le taux du flux de chaleur est proportionnel avec les variations de température.
Lors de l’assemblage des éléments les taux de flux de chaleur q i des éléments séparés sont combinés dans les noeuds partagés et deviennent Qi. Ainsi Qi = 0, exceptant les noeuds où la température est prescrite, noeuds situés sur une frontière à travers laquelle la chaleur est transférée, ou dans les noeuds internes, où Q i peut résulter de qv. Usuellement Qi est déterminée à partir des conditions sur la frontière par convection ou par radiation, exactement sous la même forme que les forces nodales équivalentes sont déterminées à partir des pressions sur une surface dans l’analyse des contraintes.
Les températures nodales non-nulles prescrites sont traitées de la même façon que les déplacements nodaux non-nuls sont prescrits dans l’analyse des contraintes.
COURS 10
SOLIDES 3D ET SOLIDES DE RÉVOLUTION
10.1 Introduction
Le terme « Solide 3D » est utilisé pour définir un solide tridimensionnel sans aucune restriction en ce qui concerne la forme, le chargement, les propriétés du matériau et les conditions sur la frontière. Comme une conséquence face à son degré de génétalité, c’est qu’il faut absolument prendre en compte toutes les six contraintes (trois normales - x, y, z et trois de cisaillement - xy, xz, yz). En même temps, le champ de déplacements est défini par ses trois possibles composantes : u, v et w.
Les éléments finis typiques pour modeler les solides 3D sont l’élément tétrahédrique et l’élément héxaédrique , avec trois degrés de liberté de translation pour chaque noeud.
Fig.9.1,a Etat tridimensionnel de contrainte Fig.9.1, b Elément fini héxaédrique à huit noeuds
Des problèmes de flexion des poutres, d’état plan de contraintes, plaques etc. peuvent être analysés comme des cas spéciaux de solide 3D. Dans ce cas pourquoi ne pas utiliser des éléments 3D pour modeler n’importe quel problème. En fait, cela ne serait pas une simplification du fait que les éléments 3D sont les plus difficiles et ceux qui prennent le plus de temps pour détecter les éventuelles erreurs. En même temps, dans l’analyse des poutres, des plaques et des coques, ces éléments deviennent assez déformés.
46
y
x
z
z
z
yy
x
x
zy
xy
xy
zy
zxzx
yz
yz
xz
xz
y, v
x, u
z, w
1
2 3
4
6
5 8
7

La méthode des éléments finis
Un solide de révolution, dénommé aussi solide à symétrie axiale, est généré par la rotation d’une surface plane par rapport à un axe dans son plan.
Fig.9.2 Etat de contrainte dans les éléments de révolution10.2 Relations contraintes – déformations - température
La relation constitutive pour un matériau linéaire et élastique peut être écrite sous la forme :
(9.1)
Pour un matériau isotrope, avec une contrainte initiale 0 produite par une variation de température, l’équation (9.1), écrite sous une forme développée, devient :
(9.2)où est le coefficient de dillatation thermique et - le coefficient de Poisson.
Dans le cas d’un problème de symétrie axiale, pour un matériau isotrope, l’équation (9.1) devient :
47
r
zr
zr
z
z, w
r, u
z, w
r, u

La méthode des éléments finis
(9.3)
10.3 Relations déformations – déplacements
Soient u = u(x, y, z), v = v(x, y, z) et w = w(x, y, z) les composantes des déplacements d’un point arbitaire suivant les directions x, y, z. Si les déformations et les rotations sont petites, les déformations et les gradients des déplacements, dans le système de coordonnées cartésiennes sont liés par :
(9.4)
Pour un solide de révolution, on peut passer du système de coordonnées cartésiennes au système de coordonnées cylindrique. Si les déformations sont axiales symétriques la composante du déplacement circonférentiel v est nulle, la composante radiale sera u = u(r, z), et la composante du déplacement axial sera w = w(r, z). Les déformations r et z sont nulles. Les seules déformations non-nulles dans le cas d’une symétrie axiale sont :
(9.5)
Les déplacements {u} dans l’intérieur de l’élément sont interpolés à partir des degrés de liberté nodaux. Si les noeuds ont seulement des translations, et n est le nombre de noeuds par élément, N aura 3n colonnes pour un élément 3D et 2n colonnes pour un élément axial symétrique. On aura donc :
(pour solides 3D)
(9.6)
48

La méthode des éléments finis
(pour déplacements axisymétriques dans un solide
(9.7)
10.4 Formules pour la matrice [k]
La substitution {u} = [N]{ } dans la relation déformation - déplacement conduit à l’obtention de la matrice [B] (déformation – déplacement).
Pour un nombre n de noeuds per élément et pour des translations seulement, les expressions de {} et de [k] sont présentées en ce qui suit :
Solides 3D Solides de révolution
Observations
Pour prévenir la singularité de la matrice [K] les conditions à la limite pour un solide 3D doivent supprimer six mouvements de corps solide ; translation et rotation pour chacune des trois axes de coordonnées. Dans un solide de révolution avec des déformations axisymétriques, la translation w au long de l’axe z est le seul mouvement possible de corps rigide. Par conséquent [K] sera non singulière si w est prescrit seulement dans un noeud, ou plus exactement, autour d’un circle nodal.
Une composante radiale axisymétrique du chargement est du point de vue statique équivalente à 0, mais cela ne veut pas dire qu’elle doit être éliminée dans le vecteur des chargements. Elle produit aussi bien des contraintes que des déformations.
Sur la circonférence une charge radiale uniformément répartie q contribue comme une force radiale F = 2qr.
COURS 11 + 12
LA MÉTHODE DES ÉLÉMENTS FINIS APPLIQUÉE AUX STRUCTURES EN MATÉRIAUX COMPOSITES RENFORCÉS PAR DES FIBRES
11.1 Introduction
La plupart des éléments finis spécialisés dans le domaine des matériaux composites permettent une analyse globale des structures, les éléments finis ayant l’épaisseur égale à celle du matériau composite pris en compte. Les éléments de ce type ne permettent pas l’identification de la nature des endommagements dans l’intérieur du composite. Il est donc impossible d’étudier les déteriorations de la structure et l’application des critères de rupture pour le matériau composite. Ces logiciels ne peuvent pas calculer les contraintes interlaminaires qui produisent la délamination du matériau. Avec ces éléments on peut obtenir seulement des informations sur l’état de contrainte et de déformation dans chaque pli (couche) qui fait partie du composite en ensemble.
11.2 Déduction de la matrice de rigidité pour un élément fini composite
49
de révolution)

La méthode des éléments finis
En ce qui suit on présente un élément fini tridimensionnel, relativement simple, destiné à l’analyse locale et globale dans les structures réalisées en matériaux composites renforcés par des fibres.Cet élément a huit noeuds, étant un héxaèdre avec la base un quadrilatère quelconque et l’épaisseur égale à celle d’une couche. Le calcul de la matrice de rigidité sera effectuée en partant des équations générales de la théorie de l’élasticité pour les milieux anisotropes.
11.2.1 Hypothèses de calcul
Cet élément ne peut être utilisé que pour les structures de type plaque. Les sollicitations considérées sont des forces concentrées dans les noeuds et orientées
sur n’importe quelle direction du système global d’axes x, y ou z. Chaque couche représente un composite unidirectionnel, la direction de renforcement
étant caractérisée par l’angle entre la direction des fibres et celle de l’axe Ox. Au niveau global, le stratifié est caractérisé par les angles d’orientation des fibres
[1 2 ... n], où n représente le nombre total de couches.
Fig. 11.1 Systèmes d’axes local (ℓ t z) et global (x y z) pour un stratifié plan
Pour les stratifiés symétriques (symétrie de type miroir) - c’est-à-dire couches identiques (de même orientation) se trouvent à distance égale par rapport au plan médian du stratifié – on choisit le système d’axes dans le plan médian, sur l’un des côtés du stratifié.
Pour les couches, le système d’axes local Oℓtz est choisi de telle manière que l’axe Oℓ soit orientée sur la direction des fibres de renforcement, Ot perpendiculaire à celle-ci et Oz perpendiculaire sur le plan de la couche.
Chaque couche est considérée un milieu continu, linéaire et élastique ; Les couches sont considérées orthotropes, parallèles les unes aux autres et
bien collées ; Les effets d’interface fibre-matrice sont négligés .
11.2.2 Déduction de la matrice d’élasticité pour une couche
Pour une couche, la relation entre les contraintes et les déformations spécifiques est donnée par :
50
x
y
z ℓ
t

La méthode des éléments finis
(11.1)
où :
- {ε} = le vecteur des déformations spécifiques pour une couche, en coordonnées locales ;
- {} = le vecteur des contraintes pour une couche, en coordonnées locales (fig. 11.2) ;
- [S] = matrice des compliances, rapportée au système d’axes local.`
Fig.11.2 Composantes du vecteur des contraintes dans une couche, en coordonnées locales
Il y aura donc cinq constantes élastiques indépendantes pour la caractérisation élastique d’une couche (matériau isotrope à isotropie transversale).
En inversant la relation (11.1), on obtient la relation :
51
x
z
y
z
yℓ
t
ℓ tℓzℓ
ℓt
t
zt
z
ℓz tz

La méthode des éléments finis
(11.2)
et
et : (11.3)
Rapportée au système de coordonnées global Oxyz, la relation (11.2) devient :
(11.4)où :
(11.5)
et , c = cos et s = sin.
(11.6)
11.3 Présentation du type d’élément fini
L’élément pris en compte est un élément tridimensionnel pour lequel est présentée la méthodologie de calcul de la matrice de rigidité.
Celui-ci a huit noeuds, trois degrés de liberté pour chaque noeud (trois translations) et rapporté au système de coordonnées naturel O. Par rapport à son système naturel de coordonnées, l’élément devient un cube ayant les dimensions sur les trois directions comprises entre -1 et 1. C’est un élément isoparamétrique, donc il utilise les mêmes fonctions d’interpolation, aussi bien pour l’approximation du champ de déplacements que pour la description de sa géométrie.
Fig.11.3,a Elément fini tridimensionnel rapporté au système de coordonnées globales
52
x
z
y
1
2
3
4
8
5
6
7

La méthode des éléments finis
Fig.11.3,b Elément fini tridimensionnel rapporté au système de coordonnées naturelles
Les fonctions de forme correspondantes seront :
Les fonctions de forme Ni vérifient les propriétés de la MEF : elles sont nulles dans n’importe quel point exceptant le noeud i et égales à l’unité dans le noeud respectif.
11.4 Approximation des déplacements
Le vecteur des déplacements nodaux pour un élément a 24 composantes et peut être écrit sous forme de :
(11.7)
où uxî représente le déplacement du noeud i sur la direction de l’axe Ox etc.
Le vecteur des déplacements dans l’intérieur de l’élément (vecteur du champ de déplacements) est approximé à l’aide des fonctions de forme Ni i = 1...8 :
ux (x,y,z) N1ux1 + N2ux2 + ... + N8ux8
uy (x,y,z) N1uy1 + N2uy2 + ... + N8uy8 (11.8)
uz (x,y,z) N1uz1 + N2uz2 + ... + N8uz8
Une autre forme dont la relation (11.8) peut être écrite sera:
53
1(1,-1,1)
2 (1,1,1)(-1,1,1) 3
(-1,-1,1) 4
5 (1,-1,-1)
6 (1,1,-1)(-1,1,-1) 7
(-1,-1,-1) 8

La méthode des éléments finis
(11.9)
Sous une forme condensée, la relation (11.9), s’écrit sous la forme :
(11.10)
où {} est le vecteur du champ de déplacement.
11.5 Approximation de la géométrie
L’élément fini en cause est isoparamétrique, donc aussi bien sa géométrie que l’approximation des déplacements intérieurs sont obtenus à l’aide des mêmes fonctions de forme, comme il en suit :
(11.11)
ou bien :
. De même, y = [N] {Y} et z = [N] {Z}.
[N] = [N1 N2 ... N8] = matrice ligne des fonctions de forme ;{X}, {Y}, {Z} = vecteur des coordonnées nodales de l’élément.
11.6 Déduction de la matrice [B]
Les relations entre les déplacements et les déformations relatifs sont :
54

La méthode des éléments finis
(11.12)
En introduisant la valeur de {} = , on obtient :
(11.13)
ou, sous forme condensée, {} = [ [B1] [B2] ... [B8] ] {(e)}.
11.7 Détermination de la forme finale de la matrice de rigidité de l’élément fini destiné pour le calcul des structures composites stratifiées
En connaissant les matrices [B] et [D], on peut déterminer l’expression la matrice de rigidité pour l’élément fini en cause.
Pour un élément de volume parallélipipédique, le volume élémentaire est : dV = dxdydz.L’aire élémentaire dA peut être écrite sous la forme :
dA= dxdy = det [J] dd, (11.14)
où det [J] représente le facteur de transformation d’une aire du système cartésien xOy à celui naturel et .En ce qui concerne dz, celui ci peut être exprimé en fonction de z :
55

La méthode des éléments finis
dz = d z (11.15)où z représente la moitié de l’épaisseur d’une couche.
Le volume élémentaire devient :
dV = det [J] ddd z (11.16)
En remplaçant l’expression de dV dans la forme générale d’une matrice de rigidité pour un élément fini, on obtient :
(11.17)
L’utilisation du système naturel de coordonnées présente l’avantage qu’il permet le calcul numérique des intégrales avec une très bonne précision.
56

La méthode des éléments finis
TEMA 1O structură de tip macara, formată din bare de oţel (E = 2105 MPa), de arii egale (A = 4000 mm2), trebuie să reziste la acţiunea unei forţe înclinate F. Ştiind că a = 1 m şi a = 150 MPa, să se determine sarcina capabilă Fcap fără a depăşi rezistenţa admisibilă şi să se calculeze deplasarea totală a punctului de aplicare a forţei.
No. crt. 1 30o 0,25 2 3 4 42 45o 0,5 3 2 4 33 60o 0,75 3 3 5 44 120o 1 2 4 5 45 125o 1,25 3 3 4 36 150o 1,5 3 4 6 37 180o 1,75 2 3 4 48 210o 2 3 2 4 39 225o 2,25 3 3 5 4
10 240o 2,5 2 4 5 411 270o 2,75 3 3 4 312 300o 3 3 4 6 313 315o 3,25 2 3 4 414 330o 3,5 3 2 4 3
57
F
aa
a
a
a
aa
a aa/2
a/2





























