-
Mecanique des fluidesVersion mise a jour le 17 septembre
2014
Table des matieres
1 Objectifs et plan du cours 2
2 Generalites sur les fluides 2
2.1 Notion de fluide . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 22.2 Forces dans un fluide . . . . . . . . . . . .
. . . . . . . . . . . . . . . 3
2.2.1 Forces de volume . . . . . . . . . . . . . . . . . . . . .
. . . . 32.2.2 Forces de surface, tenseur des contraintes . . . . .
. . . . . . 32.2.3 Lois de comportement, fluides newtoniens . . . .
. . . . . . . 32.2.4 Tension superficielle . . . . . . . . . . . .
. . . . . . . . . . . 4
2.3 Proprietes mecaniques macroscopiques dun fluide . . . . . .
. . . . 42.3.1 Masse volumique, densite . . . . . . . . . . . . . .
. . . . . . 42.3.2 Viscosite . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 5
3 Cinematique des fluides 5
3.1 Description lagrangienne, eulerienne ; derivee particulaire
dun champ 53.2 Lignes et surfaces particulieres dun ecoulement . .
. . . . . . . . . . 63.3 Evolution dune particule fluide . . . . .
. . . . . . . . . . . . . . . . 73.4 Flux, debits . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 83.5 Ecoulements
particuliers (mais frequents) . . . . . . . . . . . . . . . 8
4 Elements de dynamique des fluides 8
4.1 Theoremes de transport . . . . . . . . . . . . . . . . . . .
. . . . . . 84.1.1 Variables intensives et extensives . . . . . . .
. . . . . . . . . 84.1.2 Volume de controle . . . . . . . . . . . .
. . . . . . . . . . . . 94.1.3 Theoremes de transport . . . . . . .
. . . . . . . . . . . . . . 9
4.2 Conservation de la masse . . . . . . . . . . . . . . . . . .
. . . . . . 104.3 Conservation de la quantite de mouvement . . . .
. . . . . . . . . . 10
4.3.1 Forme integrale . . . . . . . . . . . . . . . . . . . . .
. . . . . 104.3.2 Forme locale : loi fondamentale de la dynamique
des fluides . 11
5 Le fluide newtonien 11
5.1 Equations de Navier-Stokes . . . . . . . . . . . . . . . . .
. . . . . . 125.2 Cas du fluide newtonien incompressible . . . . .
. . . . . . . . . . . 125.3 Conditions auxiliaires . . . . . . . .
. . . . . . . . . . . . . . . . . . 12
5.3.1 Paroi solide . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 125.3.2 Interface entre deux fluides . . . . . . . . . .
. . . . . . . . . 13
5.4 Exemples de solutions exactes des equations de Navier-Stokes
. . . . 13
1
-
6 Ecoulements de fluide parfait 13
6.1 Equation dEuler . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . 136.2 Theoreme de Bernouilli . . . . . . . . . . . .
. . . . . . . . . . . . . 14
7 Analyse dimensionnelle et similitude 14
7.1 Analyse dimensionnelle des equations de Navier-Stokes
incompressibles 147.2 Theoreme de Vaschy-Buckingham . . . . . . . .
. . . . . . . . . . . . 147.3 Exemples dapplication du theoreme de
Vaschy-Buckingham . . . . . 14
8 Formulaire 15
8.1 Operateurs differentiels . . . . . . . . . . . . . . . . . .
. . . . . . . . 158.1.1 Coordonnees cartesiennes . . . . . . . . .
. . . . . . . . . . . 158.1.2 Coordonnees cylindriques . . . . . .
. . . . . . . . . . . . . . 16
8.2 Identites vectorielles, tensorielles, et integrales . . . .
. . . . . . . . . 17
2
-
1 Objectifs et plan du cours
Ce cours introduit les concepts les plus elementaires de la
mecanique des fluides,et la facon dutiliser ces concepts pour
resoudre des problemes de mecanique desfluides simples. Cela passe
par :- lintroduction de definitions elementaires : Quest-ce quun
fluide ? Un debit ? Uneviscosite ? Etc ;- lintroduction des outils
mathematiques de la mecanique des fluides : ApprochesLagrangienne
ou Eulerienne, equations de base, Analyse dimensionnelle, etc ;- la
formulation de problemes, et lanalyse qui conduit au choix de la
methode deresolution.
Le cours se compose de 7 sections autres que cette introduction.
Certaines partiespeuvent etre incompletes : Elles seront traitees
lors du cours oral.
La section 2 est (elle aussi) introductive : Nous definissons ce
quest un fluide, sesproprietes mecaniques, les grandeurs qui le
caracterisent. Nous definissons egalementles grandeurs qui
caracterisent son ecoulement. Nous en profitons aussi pour
fairequelques rappels de calcul vectoriel.
La section 3 traite de la cinematique des fluides : comment
decrire le mouvementdun fluide. Ici, nous ne parlons pas encore des
forces qui generent ce mouvement.
La section 4 pose les bases mathematiques pour letude de la
dynamique des
fluides. Il y a donc des forces. Brievement, il sagit de
reecrire la loi
F = ma ,bien connue pour les points materiels, dans le cas dun
fluide, afin de diagnostiquerson mouvement (quand nous connaissons
les forces en jeu) ou bien les forces (quandnous connaissons le
mouvement du fluide).
Les sections 5 et 6 examinent les lois etablies precedemment
dans les cas parti-culiers des fluides newtoniens et parfaits. Dans
le cas du fluide parfait, lequation deBernouilli, apercue en 2eme
annee de licence, est re-derivee.
La section 7 traite de lanalyse dimensionnelle et des
similitudes, theorie tresutilisee pour etudier des ecoulements sur
des modeles reduits. Nous abordons aussile theoreme de
Vaschy-Buckingham. Ce theoreme est un outil tres puissant,
quipermet de resoudre simplement certains problemes physiquement
tres complexes.Mais cette approche requiert du bon sens et de la
pratique ; lerreur nest jamaisbien loin pour le neophyte...
Enfin, la section 8 fournit un formulaire daide au calcul
differentiel et vectoriel.
2 Generalites sur les fluides
2.1 Notion de fluide
Un solide possede la propriete de pouvoir se maintenir au repos
meme soumisa certains efforts de cisaillement. Ce nest pas le cas
dun fluide, qui ne peut pasetre maintenu au repos quand des efforts
de cisaillement lui sont appliques. Cestla definition intuitive.
Plus formellement, un fluide est un milieu continu tel quevous
lavez defini en Licence 2. La difference entre un milieu continu
solide et unmilieu continu fluide se fait par la loi de
comportement.
La famille des fluides se composent des liquides et des gaz. La
premiere difference
3
-
entre un liquide et un gaz, pour la mecanique, est la
compressibilite. Alors quunliquide est souvent peu compressible
(voire incompressible), les gaz le sont fortement.Souvent dautres
elements distinguent nettement les liquides des gaz : la
capacitecalorifique, la densite, par exemple. Mais les mouvements
des liquides et des gaz sontregis par les memes lois physiques.
2.2 Forces dans un fluide
2.2.1 Forces de volume
Les forces de volume sont les forces exterieures au milieu
fluide auquel on sinteresse,hormis les forces de contact. Il sagit
donc des forces de gravite, electriques, electromagnetiquesen
general, mais aussi les forces dinertie dans des referentiels
non-galileens. Nousnotons la force de volume elementaire
dFv(x) = fvd, (1)
(x) etant la masse volumique du fluide (qui peut varier
spatialement, voire tempo-rellement) en kg.m3, g le vecteur gravite
en N.kg1, et d un element de volume.
2.2.2 Forces de surface, tenseur des contraintes
Les efforts interieurs dans un milieu continu sont representes
par le tenseur descontraintes, que lon notera (x). La force
elementaire qui sexerce sur un elementde surface ds orientee par le
vecteur unitaire n(x) dun element de volume de fluidesecrit :
dFs = (x).n(x)ds (2)
ou le point denote le produit tensoriel. Lunite dune contrainte
est le N.m2. Levecteur (x).n(x), qui est la derivee de la force par
rapport a la surface, est appelele vecteur contrainte.
La contrainte la plus simple a apprehender est celle de
pression, dune part parcequelle existe meme lorsque le fluide est
au repos (on se souviendra a cet egard la loimathematique de
lequilibre hydrostatique), dautre part parce quelle ne contientpas
de composantes de cisaillement. Le tenseur est diagonal, represente
par :
(x) = p(x)1, (3)
ou 1 represente le tenseur identite.
2.2.3 Lois de comportement, fluides newtoniens
Dune facon plus generale, nous ecrirons le tenseur des
contraintes dans un fluideen mouvement sous la forme :
(x) = p(x)1 + (x), (4)
ou (x) represente le tenseur des contraintes dorigine visqueuse.
Pour les fluidesnewtoniens, cest-a-dire les fluides usuels, comme
leau, lair, lhuile, etc, est unefonction lineaire du gradient de la
vitesse du fluide. Il secrit :
= (div u)1 + 2d, (5)
4
-
ou et sont les coefficients de viscosite de Lame, u le champ de
vitesse du fluide,et d le tenseur de taux de deformation du fluide,
d = (grad u + (grad u)T )/2, sur
lequel nous reviendrons plus en detail dans la section 3. est
appele la viscosite devolume du fluide, est la viscosite dynamique.
Pour certains fluides simples,ils sont lies par la relation de
Stokes :
3+ 2 = 0. (6)
2.2.4 Tension superficielle
Les forces de tension superficielle se retrouvent a linterface
entre 2 fluides. Onles classe un peu a part car dans la plupart des
cas de fluide en mouvement, ellessont negligeables devant les
autres forces. Mais elles sont tres importantes dansdautres
situations : equilibre dune goutte deau, effets de capillarite,
etc. La tensionsuperficielle est due aux forces intermoleculaires
dans un liquide. Chez les gaz, cesforces sont si faibles quil ny a
pas de consequence en terme de tension superficielle.
La tension superficielle se caracterise mathematiquement par un
coefficient detension superficielle pour une certaine interface
gaz/liquide. Imaginons un seg-ment trace sur la surface du liquide
(une goutte deau par exemple). Sur la pressiondevient trop forte
dans la goutte deau (on peut aussi imaginer un ballon de
bau-druche), celle-ci peut se dechirer le long du segment. La force
qui maintient cesegment en place et empeche son dechirement (jusqua
un certain point) est la forcede tension superficielle, qui
sapplique, donc, perpendiculairement au segment. Sonamplitude est
proportionnelle a la longueur du segment, ainsi quau coefficient
detension superficielle :
df = dl, (7)
avec df dl. Quelques exemples de valeur pour : air/eau : 72 103N
m1 ; air/mercure : 487 103N m1 ; air/huile : 30 103N m1 ;
air/alcool ethylique : 22 103N m1
Dun point de vue macroscopique, on note que : les forces de
tension superficielle sont nulles si la surface du liquide est
plane
(car il ny a pas dautre force a equilibrer) ; Il existe une
discontinuite (saut) de pression au passage dune interface
soumise
a de la tension superficielle ; Il y a de la tension
superficielle en presence dun troisieme milieu. Par exemple,
une goutte posee sur une surface. Langle de contact de leau avec
la surfacerenseigne sur la mouillabilite de la surface par le
liquide.
2.3 Proprietes mecaniques macroscopiques dun fluide
2.3.1 Masse volumique, densite
Masse volumique : , en kg m3.Densite : d = /w, ou w est la masse
volumique de leau (1000).
5
-
2.3.2 Viscosite
La viscosite est due a linteraction des molecules du fluide
entre elles et traduitla resistance du fluide a une force de
cisaillement. La viscosite dynamique estnotee , exprimee en Pa.s.
Elle lie la contrainte tangentielle (cisaillement) au tauxde
cisaillement du fluide, comme cela a ete evoque en section 2.2.3.
Dans le casdun fluide newtonien, la viscosite ne depend pas
elle-meme du taux de cisaillement.Enfin, on utilise souvent la
viscosite cinematique, = /.
3 Cinematique des fluides
Dans cette section et les suivantes, il est souvent fait mention
de particulesfluides ou de parcelles de fluide. Il est entendu, par
ces denominations, unvolume elementaire de fluide (mais malgre tout
macroscopique) soumis au transportet aux contraintes presentes au
sein du fluide. Mais ce volume reste indivisible.
3.1 Description lagrangienne, eulerienne ; derivee particulaire
dunchamp
Dans la description dun mouvement fluide, lapproche lagrangienne
se concentresur les particules fluides. Soit M une particule
initialement (a linstant t = t0) situeea la position X0 dans le
volume de fluide. Il sagit de determiner la position X(t) decette
meme particule a un autre instant t ulterieur, donc de determiner
la fonction
X(t) = (X0, t). (8)
Dune facon plus generale, toute grandeur caracteristique de la
particule (temperature,masse volumique, etc) secrit sous une forme
similaire. En particulier, la vitesserepresente la vitesse de la
particule qui peut etre considere comme un point materiel.Elle
secrit donc :
U(X, t) =
t(X0, t). (9)
Mais en mecanique des fluides, la description eulerienne est
nettement plusrepandue. Plutot que de se concentrer sur des
trajectoires de particules, lapprocheeulerienne decrit les
quantites comme des champs tridimensionnels variant dans les-pace
et dans le temps. Par exemple, a un instant t donne, le champ de
vitesse variedune parcelle a une autre ; on traduit cette
dependance en ecrivant :
u = u(x, t). (10)
Alors que dans la description lagrangienne, X est une variable
et represente la po-sition dune particule, ici x est une simple
coordonnee de lespace.
Un petit inconvenient de la description eulerienne est son
application pour la
loi fondamentale de la dynamique (
F = ma ) puisque celle-ci sapplique auxparticules materielles,
donc correspond mieux a lapproche lagrangienne. Cela estfacilement
corrige par lintroduction de la derivee particulaire.
6
-
Soit N(x, t) une grandeur scalaire de lecoulement (en
description eulerienne). Silon considere simplement la derivee
partielle par rapport au temps,
N
t= lim
dt0
N(x, t+ dt)N(x, t)
dt, (11)
nous soustrayons 2 quantites, dans le numerateur, qui ne se
referent pas au memepoint materiel. Pour corriger cela, il faut
tenir compte du deplacement de la parcelleentre les instants t et
t+ dt. Ecrivons qua linstant t+ dt, la parcelle initialement a(x,
t) se retrouve a x+ dx = x+ dX. La variations de N pour cette
parcelle entre tet t+ dt est :
dN = N(x+ dx, t+ dt)N(x, t) =N
tdt+ grad N.dX, (12)
dont on tire la definition de la derivee particulaire pour N
:
dN
dt=
N
t+ grad N.u . (13)
En particulier, si N prend successivement les valeurs de 3
composantes de lavitesse, nous obtenons lacceleration de la
parcelle fluide :
du
dt=
u
t+ grad u.u . (14)
3.2 Lignes et surfaces particulieres dun ecoulement
Les lignes de courant sont les lignes qui, en tout point et a un
instant donne,sont localement paralleles au champ de vitesse de
lecoulement : dx u = 0. Ellessont donc solutions du systeme
dequations
dx
u(x, t)=
dy
v(x, t)=
dz
w(x, t). (15)
Les lignes de courant varient dans le temps en general, mais
elles sont determineesa partir dun snapshot du champ de vitesse.
Cest donc tres different de la tra-jectoire dune particule, qui
represente lensemble des lieux geometriques visitespar cette
particule au cours de son deplacement au sein du fluide. Lequation
dunetrajectoire est obtenue en resolvant lequation
X
t= u(X, t), (16)
avec une condition initiale propre a la particule etudiee : X(t
= 0) = X0.Une ligne demission est lensemble de lieux geometriques
visites par les par-
ticules qui sont passees par un certain point donnes en amont.
Cest tres facile aobserver experimentalement, il suffit de placer
une source de traceur colore au pointvoulu.
Dans le cas dun ecoulement permanent (stationnaire), les lignes
de courant, tra-jectoires et lignes demission concident.
Soit une courbe geometrique au sein dun ecoulement. Lensemble
des lignesde courant qui sappuient cette courbe definissent une
surface de courant. Si lacourbe est fermee, cest un tube de
courant.
7
-
x
y
A B
CD
x
y
A
B
C
D
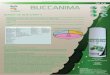
Figure 1 Evolution dune particule de fluide en 2 dimensions.
3.3 Evolution dune particule fluide
Une particule fluide peut subir, en un temps elementaire dt, 4
types de transfor-mation elementaires :
une translation u(x, t)dt ; une rotation, de tenseur taux de
rotation = 12(grad u grad u
T ) ;
des deformations de tenseur taux de deformation d = 12(grad
u+grad uT ) ;
une dilatation, de taux de dilatation volumique div u = tr d.La
superposition de ces 4 transformations est illustree sur la figure
1. A linstant t(figure de gauche), le point A est en (x, y), le
point C en (x+dx, y+dy). A linstantt + dt (figure de droite), A a
subi une translation de u(x, y)dt ; le point C sestdeplace en :
x = x+ dx+ u(x+ dx, y + dy)dt (17)
= (x+ dx) + u(x, y)dt+u
xdxdt+
1
2
(
u
y+
v
x
)
dydt+1
2
(
u
y
v
x
)
dydt.(18)
y = y + dy + v(x+ dx, y + dy)dt (19)
= (y + dy) + v(x, y)dt+v
ydydt+
1
2
(
v
x+
u
y
)
dxdt+1
2
(
v
x
u
y
)
dxdt.(20)
(21)
On remarque que le taux de rotation est symetrique et de
diagonale nulle. Ilsuffit donc de 3 parametres seulement pour le
caracteriser, que lon rassemble dansle vecteur rotation ou
vorticite, = rot u. On definit parfois le vecteur tour-billon comme
la moitie de la vorticite. La vorticite est une grandeur tres
importantepour certaines theories de la mecanique des fluides,
comme la turbulence, la dyna-mique des fluides geophysique, par
exemple. En particulier, elle obeit a des lois deconservation comme
la vitesse. Mais dans le cadre de ce cours, nous nexplorons pasces
aspects.
Pourquoi est-ce interessant de distinguer les transformations
elementaires ? Nousverrons par la suite que 2 des 4 transformations
interviennent directement dans laloi de comportement du fluide
newtonien. Il faut donc les connatre.
8
-
3.4 Flux, debits
Soit a(x, t) un champ de vecteurs, on appelle flux de a a
travers la surface S laquantite :
=
S
a(x).n(x)ds, (22)
ou n(x) represente le vecteur normal a lelement de surface ds.
Soit k(x) une gran-deur scalaire volumique (par exemple, une
concentration de traceurs) distribuee dansun ecoulement caracterise
par une vitesse u(x). On appelle debit de k a travers lafrontiere S
le flux du vecteur ku :
=
S
k(x)u(x).n(x)ds. (23)
Ce debit represente la quantite totale de la grandeur scalaire
qui traverse la surfaceS par unite de temps. Si par exemple k est
en kg m3, est en kg s1.
3.5 Ecoulements particuliers (mais frequents)
On parle decoulement permanent ou stationnaire lorsque le champ
de vitesseeulerien est independant du temps :
u
t= 0. (24)
Dans ce cas, les lignes de courant, trajectoires et lignes
demission sont identiques.Un ecoulement est dit incompressible
aucune parcelle fluide ne peut subir de
dilatation. Il en resulte :div u = 0. (25)
Un ecoulement est tourbillonnaire lorsque le vecteur tourbillon
nest pas nulpartout dans lecoulement.
4 Elements de dynamique des fluides
4.1 Theoremes de transport
Pour etablir les equations de la dynamique, nous allons proceder
par des bi-lans, engageant les derivees temporelles de lintegrale
des quantites extensives dunsysteme sur un volume (volume de
controle). Les theoremes de transport permettentune ecriture de ces
derivees qui facilite la derivation des lois fondamentales de la
dy-namique.
4.1.1 Variables intensives et extensives
Une variable F est extensive lorsque sa valeur pour un domaine
ou elle est uni-formement distribuee est proportionnelle au volume
du domaine. Elle est spatiale-ment additive et peut etre definie
par une densite volumique f :
F =
fd. (26)
9
-
Quelques exemples de grandeurs extensives (densite volumique) :
volume (1), masse(masse volumique ), energie cinetique (u2/2),
quantite de mouvement (u).
Une variable est intensive lorsquelle nest pas spatialement
additive (vitesse,pression, temperature, masse volumique).
Le produit dune variable intensive et dune variable extensive
est une variableextensive.
4.1.2 Volume de controle
Un objectif de la mecanique des fluides est de lier la nature
dun ecoulementdun fluide aux forces exterieures qui sexercent sur
lui. Il faut donc definir ce termedexterieures, ce qui se fait en
identifiant un systeme. Pour les fluides on parleplutot de volume
de controle et de surface de controle pour le delimiter. Cevolume
de controle peut prendre differentes formes.
Dans une approche lagrangienne, le volume considere est un
volume materielqui est defini comme contenant un ensemble continu
de particules, invariantes aucours du temps. Il sagit donc dun
systeme ferme.
Dans une approche eulerienne, le volume est un volume
geometrique, pasnecessairement immobile mais dont les frontieres ne
sont pas materialisees par desparticules fluides ; ces frontieres
sont donc traversees par les particules du fluide enecoulement.
4.1.3 Theoremes de transport
Soit lintegrale de la quantite q(x, t), champ tensoriel dordre
quelconque, sur unvolume (t) :
J(t) =
(t)q(x, t)d(t). (27)
Il sagit de determiner dJdt.
Volume de controle geometrique fixe Cest le cas (eulerien) le
plus simple,mais pas le plus pertinent pour la suite. Ici, ne
depend pas du temps. Le resultatsecrit donc simplement :
dJ
dt=
q
td. (28)
Volume materiel Il faut tenir compte des variations temporelles
du volume decontrole :
dJ
dt=
(t)
q
td(t) +
(t)q(u.n)ds(t), (29)
ce qui constitue la forme generale du theoreme de transport (en
milieu continu, sanssurface de discontinuite).
10
-
4.2 Conservation de la masse
Pour la loi de conservation de la masse, la variable extensive
choisie est evidemmentla masse. Pour un volume materiel (t),
m(t) =
(t)(x, t)d(t), (30)
Puisque le volume est materiel, sa masse ne change pas au cours
du temps, donc
dm
dt= 0. (31)
Cette equation represente la forme integrale de la loi de
conservation de la masse.En appliquant la formule de
Green-Ostrogradsky a lequation 29 avec q = , onobtient
dm
dt=
(t)
t+ div (u)d(t). (32)
Cependant, ceci est vrai quelque soit le volume materiel
considere. Lintegrande doitdonc etre identiquement nul, ce qui
signifie :
t+ div (u) = 0. (33)
En utilisant la definition de la derivee particulaire pour et
lidentite vectoriellediv (u) = div u+ u.grad , on obtient une autre
equation equivalente :
d
dt+ div u = 0. (34)
Ces 2 equations constituent les formes locales de la loi de
conservation de la masse,ou equations de continuite.
4.3 Conservation de la quantite de mouvement
Nous prenons maintenant comme variable extensives la quantite de
mouvement.Pour un volume materiel (t),
Q(t) =
(t)(x, t)u(x, t)d(t). (35)
4.3.1 Forme integrale
Dapres la loi fondamentale de la dynamique, qui sapplique pour
un volumemateriel tel quil est defini ici, la derivee temporelle de
cette quantite est egale a lasomme des efforts exterieurs qui
agissent sur lui, en volume ou en contact :
dQ
dt= Fext. (36)
Comme deja presente dans la section 2, les efforts se
distinguent entre forces devolume et de surface :
Fext =
(t)dFv(x) +
(t)dFs (37)
=
(t)fvd+
(t)(x).n(x)ds. (38)
11
-
La derivee temporelle de la quantite de mouvement peut aussi
etre decomposee, parapplication du theoreme de transport :
dQ
dt=
(t)
u
td(t) +
(t)u(u.n)ds(t). (39)
Selon le probleme a resoudre, il est alors possible dutiliser la
forme integrale delequation de conservation en introduisant
lequation 38 et/ou lequation 39.
Dans le cas dun fluide parfait en ecoulement permanent, cette
formulation sedecline par le theoreme dEuler : Pour un tube de
courant de debit volumique qv,de vitesse dentree ue et de vitesse
de sortie us,
Fext = qv(us ue). (40)
4.3.2 Forme locale : loi fondamentale de la dynamique des
fluides
Theoreme de Reynolds Un dernier resultat theorique est
necessaire afin dederiver succinctement la loi fondamentale de la
dynamique : le theoreme de Reynolds.Celui-ci simplifie lexpression
de la derivee temporelle de la quantite de mouvement :
dQ
dt=
(t)du
dtd. (41)
Loi fondamentale En introduisant la loi de comportement pour les
fluides (sec-tion 2), les equations 36 et 38 conduisent a :
dQ
dt=
(t)fvd
(t)pn(x)ds +
(t)(x).n(x)ds. (42)
Lapplication du theoreme de Reynolds pour le terme de gauche, et
des formulesdu gradient et de Green-Ostrogradsky pour les termes de
droite, conduisent a lex-pression :
(t)du
dtd(t) =
(t)fv grad p+ div d (43)
Comme ceci est vrai pour tout volume materiel, cest vrai pour
lintegrande, ce quidonne la loi fondamentale de la dynamique :
du
dt= fv grad p+ div . (44)
5 Le fluide newtonien
Le fluide newtonien, particulierement repandu, merite une
attention particuliere.Celui-ci se distingue des autres fluides par
sa loi de comportement, donnee parlequation 5.
12
-
5.1 Equations de Navier-Stokes
Il sagit dintroduire le tenseur des contraintes dorigine
visqueuse pour le fluidenewtonien dans lequation 44. Il faut pour
cela calculer sa divergence. En sappuyantsur les identites
vectorielles et tensorielles donnees en annexe, puis sur la
relation deStokes (Eq. 6), on obtient :
div () = (+ )grad (div u) + u =
3grad (div u) + u. (45)
La loi fondamentale devient :
du
dt= fv grad p+
3grad (div u) + u. (46)
La loi de conservation de la masse (Eq. 34) reste inchangee.
5.2 Cas du fluide newtonien incompressible
Le terme incompressible se dit pour un fluide dont la masse
volumique nevarie localement pas au cours du temps par effet
mecanique (des variations liees ala temperature par exemple restent
possibles). Mathematiquement, cela se traduitpar la nullite de la
derivee temporelle (particulaire !) de , donc, dapres lequation34,
par :
div u = 0. (47)
La loi fondamentale 46 sen trouve aussi simplifee :
du
dt= fv grad p+ u. (48)
5.3 Conditions auxiliaires
On appelle conditions auxiliaires les conditions initiales et
aux limites dunprobleme. Celles-ci concernent tous les types de
fluide, pas seulement newtonien.Cependant, par souci de concision,
nous limitons leur description au fluide newto-nien.
Les conditions initiales sont les champs en jeu dans la loi
fondamentale au debutde lintervalle de temps detude : (x, 0), u(x,
0), p(x, 0). Les conditions aux limitespeuvent prendre des formes
diverses selon le probleme. Ici, on se restreint aux 2cas les plus
frequents : le fluide en contact avec une paroi solide de
deplacementconnu, et le fluide en contact avec un autre fluide, les
2 etant non miscibles entreeux (typiquement, lair et leau).
5.3.1 Paroi solide
La paroi solide avec laquelle le fluide est en contact se
deplace avec une vitesseup(x, t) connue. Si la paroi est
impermeable et que le contact entre la paroi et le fluideest
ininterrompu dans le temps, on parle de condition dimpermeabilite.
Lesparticules au contact de la paroi la suivent dans son mouvement
perpendiculairementa la surface :
u(x, t).n = up(x, t).n , (49)
13
-
ou n represente le vecteur unitaire normal a la surface. Dans le
plan parallele a lasurface de contact, on distingue generalement 2
types de conditions aux limites : lacondition dadherence, qui fait
lhypothese que les particules au contact collenta la paroi. Cela
concerne notamment tous les fluides visqueux. Dans ce cas, la
relationgeneralise la precedente :
u(x, t) = up(x, t) . (50)
Le deuxieme type est la condition de glissement, qui suppose au
contraire queles particules ne sont pas affectees dans leur
mouvement le long de la surface decontact. Cela concerne le fluide
parfait. Au point de contact :
u
n.t = 0 , (51)
ou n represente la coordonnee spatiale le long de n.
5.3.2 Interface entre deux fluides
Du fait de leur non-miscibilite et de leur viscosite, les 2
fluides en contactadherent lun a lautre et sont donc soumis a la
relation :
u1 = u2. (52)
Pour les fluides parfaits, seule la composante normale a la
surface de contact respectecette relation :
u1.n = u2.n, (53)
qui doit etre completee par une equation de continuite de la
surface, de positionS(x, t) :
dS
dt= 0 , (54)
qui peut etre calculee identiquement avec u1 ou u2.Sur le plan
dynamique, les 2 fluides verifient une continuite des contraintes
tan-
gentielles :(n)1.t = (n)2.t , (55)
t representant un vecteur unitaire tangent quelconque, tandis
que les contraintesnormales sont differenciees par la tension
superficielle :
(n)1.n = (n)2.n+
(
1
R+
1
R
)
, (56)
R et R etant les rayons de courbures de la surface dans 2 plans
perpendiculaires.
5.4 Exemples de solutions exactes des equations de
Navier-Stokes
6 Ecoulements de fluide parfait
6.1 Equation dEuler
Le fluide parfait est defini par un tenseur des contraintes
visqueuses identique-ment nuls : = 0. La loi fondamentale se reduit
a :
du
dt= fv grad p. (57)
14
-
Lequation de conservation de la masse est, elle, inchangee. Un
fluide parfait nestpas forcement incompressible.
6.2 Theoreme de Bernouilli
7 Analyse dimensionnelle et similitude
7.1 Analyse dimensionnelle des equations de Navier-Stokes
incom-pressibles
7.2 Theoreme de Vaschy-Buckingham
Lanalyse dimensionnelle est un outil puissant, car il fournit
des informations surdes phenomenes physiques sans gros calcul, mais
limite, car il produit rarement uneinformation complete. Comme son
nom lindique, lanalyse dimensionnelle examineles dimensions des
parametres en jeu dans le processus pour en extraire des
informa-tions. Lanalyse dimensionnelle peut sappliquer a tous les
domaines de la science.Elle lest neanmoins particulierement en
mecanique des fluides, raison pour laquelleelle fait
traditionnellement part des cours de mecanique des fluides.
Lanalyse dimensionnelle est formalisee par le theoreme ou
theoreme deVaschy-Buckingham dont les deux principales applications
sont :
La reduction du nombre de variables et la simplification des
problemes ; la resolution des problemes de similitude entre un
prototype et un modele aechelle reduite.
Theoreme :Soit un phenomene physique dont la nature depend de n
parametres independantsb1, . . . , bn et decrit par une relation de
la forme :
f(b1, . . . , bn) = 0. (58)
Soit k le nombre dunites fondamentales necessaires pour definir
les dimensions desparametres bi. En mecanique des fluides, ces
unites sont souvent au nombre de 4(masse, longueur, temps,
temperature) mais cela peut varier (pas de temperaturedans le
probleme, ou bien presence de champs electromagnetiques). Le
theoreme deVaschy-Buckingham dit que les jeu de n variables
initiales peut etre reduit a unjeu de n k variables sans dimension,
notees i, produits des variables initiales. Larelation ci-dessus
prend alors une forme :
(1, . . . , nk) = 0 (59)
Il existe des methodes systematiques pour construire les
variables adimensionnelles,mais on prefere generalement faire
apparatre des variables classiques en se basantsur le bon sens.
Letape la plus delicate de lapplication du theoreme de
Vaschy-Buckingham estprobablement lidentification des grandeurs
physiques initiales. Lanalyse dimension-nelle sapprend surtout par
la pratique, ce qui est laisse pour les seances de cours.
7.3 Exemples dapplication du theoreme de Vaschy-Buckingham
15
-
8 Formulaire
8.1 Operateurs differentiels
8.1.1 Coordonnees cartesiennes
La base canonique est notee (ex, ey, ez) ou (e1, e2, e3). Un
vecteur position x sedecompose (en introduisant la convention des
indices repetes) comme :
x = xiei = xex + yey + zez
Le vecteur vitesse est noteu = uex + vey + wez
Pour un champ scalaire N(x, t) (gradient, laplacien, derivee
particulaire) :
grad N = Nx
ex +Ny
ey +Nz
ez
N = 2Nx2
+ 2Ny2
+ 2Nz2
dNdt
= Nt
+ grad N.u
= Nt
+ uNx
+ v Ny
+ w Nz
Pour un champ de vecteur a(x, t) (divergence, laplacien,
rotationnel, tenseur degradient, derivee particulaire) :
div a = axx
+ayy
+ azz
a = div (grad a) = 2a
x2+
2a
y2+
2a
z2
rot a =(
azy
ayz
)
ex +(
axz
azx
)
ey +(
ayx
axy
)
ez
grad a =
axx
axy
axz
ayx
ayy
ayz
azx
azy
azz
dadt
= at
+ grad a.u
=(
t
+ u x
+ v y
+ w z
)
axex
+(
t
+ u x
+ v y
+ w z
)
ayey
+(
t
+ u x
+ v y
+ w z
)
azez
Pour un tenseur a(x, t) :
a(x, t) = aijei ej
div a =aijxj
ej
16
-
8.1.2 Coordonnees cylindriques
La base canonique est notee (er, e, ez). Un vecteur position x
se decompose (enintroduisant la convention des indices repetes)
comme :
x = rer + zez.
Le deplacement elementaire :
dx = drer + rde + dzez.
Le vecteur vitesse est note
u = urer + ue + uzez.
Pour un champ scalaire N(x, t) (gradient, laplacien, derivee
particulaire) :
grad N = Nr
er +1rN
e +Nz
ez
N = 1r
r
(
r Nr
)
+ 1r2
2N2
+ 2Nz2
dNdt
= Nt
+ grad N.u = Nt
+ urNr
+ ur
N
+ uzNz
Pour un champ de vecteur a(x, t) (divergence, laplacien,
rotationnel, tenseur degradient, derivee particulaire) :
div a = 1r
r(rar) +
1ra
+ azz
a = div (grad a)
=[
r
(
1r
r(rar)
)
+ 1r2
2ar2
2r2
a
+ 2arz2
]
er
+[
r
(
1r
r(ra)
)
+ 1r2
2a2
+ 2r2
ar
+ 2az2
]
e
+ azez
rot a =(
1raz
az
)
er
+(
arz
azr
)
e+
(
1r
r(ra)
1rar
)
ez
grad a =
arr
1r
(
ar
a)
arz
ar
1r
(
a
+ ar
)
az
azr
1raz
azz
dadt
= at
+ grad a.u
=(
art
+ urarr
+ ur
ar
uar
+ uzarz
)
er
+(
at
+ urar
+ ur
a
+ uarr
+ uzaz
)
e
+(
azt
+ urazr
+ ur
az
+ uzazz
)
ez
17
-
Pour un tenseur a(x, t) :
div a =(
arrr
+ 1rar
+ arzz
+ arrar
)
er
+(
arr
+ 1ra
+ azz
+ 2arr
)
e
+(
azrr
+ 1raz
+ azzz
+ azrr
)
ez
8.2 Identites vectorielles, tensorielles, et integrales
div (rot a) = 0
div (Na) = Ndiv a+ a.grad N
div (grad a) = a
div (grad aT ) = grad (div a)
div (Na) = Ndiv a+ a.grad N
div (a b) = b.rot a a.rot b
rot (grad N) = 0
rot (rot a) = grad (div a)a
rot (Na) = rot a+ grad N a
grad (NS) = Ngrad S + Sgrad N
grad a.a = grad a.a2 + (rot a) a
Formule de Green-Ostrogradsky :
div a d =
a.n ds
Formule du gradient (sobtient par application de la precedente)
:
grad N d =
N.n ds
Formule de Stokes :
Ca.dl =
Srot a.n ds
18