Embed Size (px)
Citation preview
DEVELOPPEMENTS POUR L’AGREGATION
25 septembre 2006

Table des matières
1 Algèbre 31.1 Caractérisation :n ∧ ϕ(n) = 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Les entiers concernés . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 31.1.3 Remarques préliminaires . . . . . . . . . . . . . . . . . . . . . . . . .. . . 31.1.4 Le groupeG est simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.5 Il existe une unique classe de conjugaison de sous-groupes maximaux . . . . 41.1.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Théorème de Burnside . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 51.3 Théorème de Weber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 81.4 Groupe simple d’ordre60 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Analyse 112.1 Formule sommatoire de Poisson et sommes de Riemann : . . . . .. . . . . . . . . . 112.2 Formule des compléments : . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 122.3 Sur les inclusions des espacesLp : . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.4 Premier théorème de Hardy pour les intégrales . . . . . . . . .. . . . . . . . . . . . 172.5 Deuxième théorème de Hardy pour les intégrales . . . . . . . .. . . . . . . . . . . 182.6 Calcul desξ(2k) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.7 Intégrales à dérivée non intégrable . . . . . . . . . . . . . . . . .. . . . . . . . . . 21
3 Probabilités 233.1 Algorithmes génétiques . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 233.2 Formules de Feynman-Kac . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 233.3 Grandes déviations, inégalités de Hoeffding, Bernsteinet Bennett . . . . . . . . . . 233.4 Arrivées poissoniennes et statistiques d’ordre . . . . . .. . . . . . . . . . . . . . . 263.5 Comportement asymptotique d’une action . . . . . . . . . . . . . .. . . . . . . . . 283.6 Modèle de Cox, Ross et Rubinstein . . . . . . . . . . . . . . . . . . . . . . .. . . . 293.7 Construction d’une suite de variables aléatoires uniformes et indépendantes . . . . . 31
1

Chapitre 1
Algèbre
1.1 Caractérisation :n ∧ ϕ(n) = 1
Le but de ce développement est de montrer que sin est un entier tel quen ∧ ϕ(n) = 1 alors toutgroupeG d’ordren est cyclique. A savoir : la réciproque est vrai. Sin est un entier tel que pour toutgroupeG d’ordren,G est cyclique alorsn vérifien∧ϕ(n) = 1. On peut démontrer ceci en remarquantque sin ∧ ϕ(n) 6= 1 alors il existe un produit semi-direct non trivial de la formeZZ/pZZ ×ψ ZZ/n
pZZ.
On démontre ce résultat en plusieurs étapes.
1.1.1 Les entiers concernés
Si n vérifien ∧ ϕ(n) = 1, on écritn = pα11 × · · · × pαs
s la décomposition en facteurs premiers den. Comme
ϕ(n) = pα1−11 (p1 − 1) × · · · × pαs−1
s (ps − 1)
alors nécessairement on a pour touti = 1, . . . , s , αi = 1 et∀i 6= j, pi 6 |pj − 1.Réciproquement, si∀i ∈ 1, . . . , s , αi = 1 et∀i 6= j, pi 6 |pj − 1 et sid est un diviseur premier
commun àn etϕ(n), alors
d|p1 × . . . ps ⇒ ∃i ∈ 1, . . . , s , d|pi
mais aussid|(p1 − 1) × . . . (ps − 1) ⇒ ∃j ∈ 1, . . . , s , d|pj − 1
et doncd = 1 carpi ∧ pj − 1 = 1.
Remarque 1.1.2.Il découle de ce qui précède que sin vérifien ∧ ϕ(n) = 1 alors pour tout diviseurd den on a aussid ∧ ϕ(d) = 1. De plus on ad ∧ n
d= 1 vu quen est le produit de nombres premiers
deux à deux distincts.
1.1.3 Remarques préliminaires
La démonstration va se faire par l’absurde. On suppose qu’ilexisten ∈ IN∗ tel quen ∧ ϕ(n) = 1et un groupeG d’ordren non cyclique. Par la suite on supposeran minimal pour cette propriété. Il
2

CHAPITRE 1. ALGÈBRE 3
résulte alors de la remarque 1.1.2 que tout sous-groupe propre deG est cyclique et que pour tout sous-groupe distinguéH non trivial deG le groupe quotientG
Hest cyclique etCard(H) ∧ Card
(GH
)= 1.
1.1.4 Le groupeG est simple
La démonstration se fait aussi par l’absurde. SoitH un sous-groupe distingué deG non trivial.AlorsH est G
Hsont cycliques. Soity ∈ G tel quey soit un générateur deG
H. On noteq le cardinal de
GH
et e l’ordre dey dansG. Commeye = ye = 1 G
H
on aq|e et donc il exister tel quee = qr. Alors yr est d’ordreq carord(yr) = ord(y)ord(y)∧r .
On va montrer queG est isomorphe au produit semi-direct interne deH et de〈yr〉. Il suffit pourcela de vérifier les trois points suivants (cours) :
1. H est disingué dansG : Vrai par hypothèse.
2. H ∩ 〈yr〉 = 1 : en effet soitx dans cette intersection. Son ordre divise alors le cardinaldeHet celui deG
Hdonc il vaut1.
3. 〈H, yr〉 = G : en effet on aH et 〈yr〉 sous-groupes de〈H, yr〉 donc son cardinal est divisibleparCard(H) et Card
(GH
)donc par le produit qui vautn car ces deux nombres sont premiers
entre eux.
Ceci nous donne alors queG est bien isomorphe au produit semi-direct interne deH par〈yr〉. Onobtient donc un morphisme (donné par la conjugaison)ψ : 〈yr〉 → Aut(H). OrH étant cyclique, onaCard(Aut(H)) = ϕ(Card(H)) et doncCard(Aut(H)) diviseϕ(n) qui est premier avecn. Donc
Card(Aut(H)) ∧ Card
(G
H
)= 1
et notre morphisme est forcément trivial. Ceci implique que le produit semi-direct est en fait unproduit direct et donc que
G ≃ H × 〈yr〉 ≃ ZZ/(n/q)ZZ × ZZ/qZZ ≃ ZZ/nZZ
le dernier isomorphisme résultant du lemme chinois. Or ceciest en contradiction avec le fait queGn’est pas cyclique : impossible. DoncG est un groupe simple.
1.1.5 Il existe une unique classe de conjugaison de sous-groupes maximaux
On énumère pour commencer un certain nombre de remarques plus ou poins triviales. SoitH unsous-groupe maximal deG etK un sous-groupe propre deG.
Notations : On noteNG(H) le normalisateur deH dansG etRH une famille de représentants desclasses à gauches deG moduloH.
– NG(H) = H carG est simple.– SiK 6⊂ H alors〈H,K〉 = G carH est maximal.– SiK 6⊂ H alorsNG(H ∩K) = G car le normalisateur contientH etK (H etK sont abéliens
car cycliques) donc〈H,K〉 = G.

CHAPITRE 1. ALGÈBRE 4
– On ak ⊂ H ouH ∩K = 1 vu le point précédent et le fait queG est simple.Supposons par l’absurde qu’il y ait au moins deux classes de conjugaison de sous-groupes maxi-
maux. Soit ainsiH etK deux sous-groupes maximaux non conjugués.– NG(H) = H carG est simple.– Pourg, k ∈ G : gHg−1 = kHk−1 ⇔ k−1g ∈ H vu le point précédent.–⋃
g∈G(gHg−1 − 1) =
∐
g∈RH
(gHg−1 − 1) vu le point précédent.
–
( ∐
g∈RH
(gHg−1 − 1))
∩( ∐
x∈RK
(xKx−1 − 1))
= ∅ carH etK sont non conjugués et le
fait que l’on a déjà montrégHg−1 ∩ xKx−1 = 1 ougHg−1 = xKx−1.On en déduit alors que
Card(G) ≥ Card
(( ∐
g∈RH
(gHg−1 − 1))
∪( ∐
x∈RK
(xKx−1 − 1))
∪ 1)
et tous ces ensembles étant disjoints, on a
Card(G) ≥ Card
(G
H
)(Card(H) − 1) + Card
(G
K
)(Card(K) − 1) + 1
soit encore
Card(G) ≥ Card(G)+
≥0︷ ︸︸ ︷(Card(G) − Card
(G
H
)− Card
(G
K
))+1
et ceci est une contradiction donc il existe une unique classe de conjugaison de sous-groupe maxi-maux.
1.1.6 Conclusion
On écritn = p1 × · · · × pr la décomposition den en facteurs premiers. Pouri = 1, . . . , r on sedonne unpi sous-groupe de Sylow deG que l’on noteSi. ChaqueSi est inclus dans un sous-groupemaximal deG que l’on noteHi.
On aS1 ⊂ H1 doncp1 diviseCard(H1) et pouri ∈ 2, . . . , r on a montré qu’il existegi ∈ G telquegiHig
−1i = H1 donc
giSig−1i ⊂ H1
et doncpi divise aussiCard(H1). Ceci nous donne alors quen = p1 ×· · ·× pr diviseCard(H1) doncH1 = G et ceci est une contradiction car un sous-groupe maximal esttoujours un sous-groupe propredeG, d’où le résultat final.
1.2 Théorème de Burnside
On va maintenant montrer (un des) le théorème de Burnside : toutes les parties génératrices mini-males des p-groupes ont même cardinal.

CHAPITRE 1. ALGÈBRE 5
Lemme1.2.1.SoitG un p-groupe etH un sous-groupe propre deG. AlorsH est strictement contenudans son normalisateur.
Preuve :Pour voir cela on considère l’action par translation deH sur l’ensemble des classes à gauche deGmoduloH, c’est à dire
A : H × GH
−→ GH
(h, gH) 7−→ hgH
En écrivant l’équation aux classes on a :∣∣∣∣G
H
∣∣∣∣ =∑
ω orbite|ω| = 1
1 +∑
ω orbite|ω| > 1
|ω|
Or siω est une orbite de cardinal> 1, commeH est aussi un p-groupe, le cardinal deω est forcémentun multiple dep.D’autre part, on pourg ∈ G :
|orb(gH)| = 1 ⇔ ∀h ∈ H, hgH = gH
⇔ ∀h ∈ H, g−1hgH = H
⇔ ∀h ∈ H, g−1hg ∈ H
⇔ g ∈ NG(H)
⇔ gH ∈ NG(H)
H
Donc l’équation aux classes devient :∣∣∣∣G
H
∣∣∣∣ =
∣∣∣∣NG(H)
H
∣∣∣∣+ kp
et comme∣∣GH
∣∣ est aussi un multiple dep,∣∣∣NG(H)
H
∣∣∣ est divisible parp. En particulierH est strictement
inclus dans son normalisateur.
Lemme1.2.2. SoitH un sous-groupe deG. On a l’équivalence :
H ⊳ G et
∣∣∣∣G
H
∣∣∣∣ = p⇔ H est maximal
Preuve :⇐ : SiH est maximal, vu qu’il est strictement inclus dans son normalisateur, on aNG(H) = G doncH ⊳ G. PuisH maximal est distingué⇒
∣∣GH
∣∣ = p (voir [Cal],ce n’est pas dur).

CHAPITRE 1. ALGÈBRE 6
Pour la réciproque voir [Cal].
Par la suite on noteΦ(G) le sous-groupe de Frattini deG, c’est à dire l’intersection des sous-groupes maximaux deG.
Lemme1.2.3. GΦ(G)
est unZZ/pZZ-espace vectoriel de dimension finie.
Preuve :NotonsH1, . . . , Hn les sous-groupes maximaux deG et considérons l’application suivante
ϕ :G −→ G
H1× · · · × G
Hn
g 7−→ (gH1, . . . , gHn)
Son noyau estΦ(G) donc par le théorème d’isomorphisme, on a queGΦ(G)
est isomorphe à un sous-
groupe deGH1
× · · · × GHn
. Or on a d’après le lemme précédent
G
H1
× · · · × G
Hn
≃ ZZ/pZZ × · · · × ZZ/pZZ
qui est unZZ/pZZ-espace vectoriel de dimensionn et tout sous-groupe peut aussi être considérécomme un sous-espace vectoriel d’où le résultat.
On peut maintenant passer au théorème.
Théorème1.2.4. Théorème de BurnsidePour un p-groupe toutes les parties génératrices minimalesont même cardinal.
Preuve : Il suffit pour cela de montrer que :
(x1, . . . , xr) est génératrice et minimale dansG⇔ (x1Φ(G), . . . , xrΦ(G)) est génératrice et minimale dansG
Φ(G)
car les parties génératrices et minimales deGΦ(G)
correspondent aux bases duZZ/pZZ-espace vectorielG
Φ(G). Et pour cela il suffit de montrer que :
– (x1, . . . , xr) est génératrice dansG⇒ (x1Φ(G), . . . , xrΦ(G)) est génératrice dansGΦ(G)
– (x1, . . . , xr) est non génératrice dansG⇒ (x1Φ(G), . . . , xrΦ(G)) est non génératrice dansGΦ(G)
Le premier point est trivial à démontrer. Pour le second, si(x1, . . . , xr) est non génératrice alorsil existe un sous-groupe maximalH deG tel que〈x1, . . . , xr〉 ⊆ H. Si π : G → G
Φ(G)désigne la
projection canonique, on a alorsπ(〈x1, . . . , xr〉) ⊆ π(H)
qui est un sous-groupe propre deGΦ(G)
. En effet six 6∈ H, π(x) 6∈ π(H) car le contraire signifieraitquex ∈ HΦ(G) = H carΦ(G) ⊆ H et c’est une contradiction.
On a donc bien démontré le résultat.

CHAPITRE 1. ALGÈBRE 7
1.3 Théorème de Weber
Voici maintenant un théorème sur les zéros des polynômes à coefficients entiers. Au fait j’aiattribué ce théorème à Weber suite à la réalisation d’une variable aléatoire uniforme sur l’ensembleKronecker; Weber ! !
Théorème1.3.1. Théorème de WeberSoitP ∈ ZZ[X] un polynôme unitaireà coefficients entierstel que toutes ses racines complexes soient de module inférieur ou égal à1. Alors celles-ci sont soit0soit des racines de l’unité.
Preuve :• Posons
AN =
Q ∈ ZZ[X] unitaire ; les racines deQ dansIC
Deg(Q) = N sont en module inférieur à1
On va donner une borne pour le cardinal deAN . SoitQ ∈ AN et λ1, . . . , λN ses racines dansIC etσ1, . . . , σN les fonctions symétriques élémentaires des racines. On a
Q =N∏
i=1
(X − λi) =N∑
i=0
(−1)N−iσN−iXi
donc le coefficientqk deXk dansQ est(−1)N−kσN−k et on a donc
|qk| =
∣∣∣∣∣∣∑
1≤i1<···<iN−k≤Nλi1 . . . λiN−k
∣∣∣∣∣∣≤
∣∣∣∣∣∣∑
1≤i1<···<iN−k≤N1
∣∣∣∣∣∣≤ CN−k
N .
Comme de plusqk ∈ ZZ ceci nous laisse2CN−kN + 1 choix pourqk. Au final on a
♯AN ≤N∏
k=0
(2CN−kN + 1) <∞.
Donc le cardinal deAn est fini.
• Soit P ∈ ZZ[X] donné par les hypothèses et soitN son degré etλ1, . . . , λN ses racines. Soita0, . . . , aN ∈ ZZ tels que
P (X) =N∑
i=0
aiXi.
Pourk ∈ IN on pose
P (k) =N∏
i=1
(X − λki ) =N∑
i=0
a(k)i X i.
Il est clair que les racines deP (k) sont en module inférieur à1 et on va maintenant montrer queP (k) ∈ ZZ[X] et ceci nous donnera :P (k) ∈ AN .

CHAPITRE 1. ALGÈBRE 8
Pour cela, posons pourr = 1, . . . , N (Σi désign le i-ème polynôme symétrique élémentaire deZZ[X1, . . . , XN ]),
Σ(k)r (X1, . . . , XN) = Σr(X
k1 , . . . , X
kN) ∈ ZZσ[X1, . . . , XN ].
D’après le théorème de structure de polynômes symétriques,il existeR(k)r ∈ ZZ[X1, . . . , XN ] tel que
Σ(k)r (X1, . . . , XN) = R(k)
r (Σ1, . . . ,ΣN)
Nous avons alors
a(k)i = (−1)N−iΣ
(k)i (λ1, . . . , λN)
= (−1)N−iR(k)i (−aN−1, . . . , (−1)Na0)
∈ ZZ carR(k)i ∈ ZZ[X1, . . . , XN ] eta0, . . . , aN ∈ ZZ
On a donc bienP (k) ∈ AN .
• Comme∀k ∈ IN, P (k) ∈ AN et queAN est fini, il existe donck 6= k′ tels queP (k) = P (k′). Ilexiste donc une permutationσ de l’ensemble1 . . . , N telle que
(λk1, . . . , λkN) = (λk
′
1 , . . . , λk′
N)
Montrons maintenant que∀i, λi est soit0 soit une racine de l’unité.Soit donci ∈ 1, . . . , N tel queλi ne soit pas nul etr le cardinal de l’orbite dei sous l’action deσ.On a
λi = (λki )1k = (λk
′
σ(i))1k
et en procédant de la même manière on montre par récurrence que
∀n, λi = λ
“k′
k
”n
σn(i)
En choisissantn = r on a
λi = λ
“k′
k
”r
i
et commeλi n’est pas nul
λkr−k′ri = 1
et ceci montre queλi est bien une racine r-ième de l’unité.
Remarque 1.3.2.Il est important queP soit unitaire comme le montre le contre-exemple trivial3X − 1.
Ce théorème montre aussi queP est alors un produit de polynômes cyclotomiques et d’un facteurXn. Ceci assure que les seuls polynômes irréductilbles unitaires deZZ[X] ayant toutes leurs racinesdans le disque unité sont les polynômes cyclotomiques et le polynômeX.
En raison de l’utilisation des polynômes symétriques et du dernier petit calcul, ce développementpasse très bien dans la leçon sur lespermutations. Tu peux aussi bien sûr l’utiliser pour celle despolynômes symétriqueset tout ce qui concernel’algèbre des polynômes à n indéterminéeset vu lepeu de développement intéressant au programme sur ces leçons, il est pour cela assez intéressant. En-suite, vu le sujet du développement je l’avais aussi placé dans les leçons desracines des polynômes,nombres complexes de module 1et vu la première partie de la démonstration je l’avais aussiplacédans lesméthodes combinatoires et dénombrements...

CHAPITRE 1. ALGÈBRE 9
1.4 Groupe simple d’ordre60
Théorème1.4.1. Tout groupe simple d’ordre60 est isomorphe àA5.
Preuve :SoitG un groupe simple d’ordre60 eta5 le nombre de5-Sylow deG. D’après les théorèmesde Sylow on aa5 ≡ 1 [5] eta5|12. Donca5 ∈ 1, 6 et commeG est simple on aa5 = 6.
Considérons alors l’action deG sur l’ensemble de ses5-SylowS5. Celle-ci nous donne un mor-phisme deG dans l’ensemble des permutations deS5, etS5 étant de cardinal6, on obtient ainsi unmorphisme
ϕ : G→ S6.
CommeG est simple on aϕ est injectif ou trivial. Or les théorèmes de Sylow assurent que l’actiondécrite ci-dessus est transitive doncϕ ne peut être trivial etϕ est injectif.
Soit ε : S6 → −1, 1 la signature. Pour les mêmes raisons que précédemmentε ϕ est injectifou trivial. Or pour des raisons de cardinal évidentes il ne peut être injectif et il est donc trivial d’où
ε(ϕ(G)) = 1
ce qui assure queϕ(G) ⊂ A6.
On a#A6 = 360 et #ϕ(G) = 6. Il reste alors juste à montrer qu’un sous-groupe simple deA6
d’indice6 est isomorphe àA5. Un raisonnement quasi-similaire est fait dans [Tau2] à la page45.SoitH un sous-groupe deA6 d’indice6. Faisons opérerH par translations à gauche sur le quotient
A6
Hqui est une ensemble de cardinal6. Comme l’action est non triviale et queH est simple ceci nous
donne un morphisme injectifθ deH dansS6 et par un raisonnement identique à celui fait plus hautavec les signatures,θ(H) ⊂ A6. D’autre part∀h ∈ H on aθ(h)(H) = H et donc tous les élémentsdeθ(H) ont un point fixe, ieθ(H) est le stabilisateur de la classeH dansA6
H. Donc
H ∼ θ(H) ∼ A5.
Remarque 1.4.2.Ce théorème est particulièrement intéressant pour la classification des groupessimples de cardinal≤ 100 (voir l’exercice1.18 de [Fra]). En particulierA5 est le seul groupe simpled’ordre≤ 100.

Chapitre 2
Analyse
2.1 Formule sommatoire de Poisson et sommes de Riemann :
Rappel : pourF ∈ L1(IR) on définit la transformée de Fourier deF par
F (x) =
∫ +∞
−∞e−2πixtF (t) dt.
Proposition 2.1.1. Formule sommatoire de Poisson :SoitF ∈ L1(IR) ∩ C0(IR). On suppose que :
∃M > 0, α > 1,∀x ∈ IR, |F (x)| ≤ M
(1 + |x|)α et+∞∑
−∞|F (n)| <∞.
On a alors la relation : ∞∑
−∞F (n) =
∞∑
−∞F (n)
Preuve :Voir [Z-Q].
On peut alors démontrer l’application suivante :
Théorème2.1.2. Soitf ∈ C∞c (IR). Pour toutq ∈ IN∗, il existe une constanteCq telle que :
∀N ≥ 1,
∣∣∣∣∣
∫
IR
f(t) dt− 1
N
∞∑
k=−∞f
(k
N
)∣∣∣∣∣ ≤CqN q
10

CHAPITRE 2. ANALYSE 11
Preuve : Posonsg(x) = f(xN
). Alors g vérifie les hypothèses de la proposition 2.1.1 et on obtient
donc ∞∑
k=−∞g(k) =
∞∑
k=−∞g(k).
Or en effectuant un changement de variable, on voit queg(x) = Nf(Nx).De plusg(0) = Nf(0) = N
∫IRf(t) dt. En utilisant tout ceci, on obtient :
∣∣∣∣∣
∫
IR
f(t) dt− 1
N
∞∑
k=−∞f
(k
N
)∣∣∣∣∣ ≤∑
k 6=0
|f(Nk)|
En utilisant ensuite quef est de classeCq et est à support compact, on a :
∀x 6= 0, |f(x)| =
∣∣∣∣1
(2πix)qf (q)
∣∣∣∣ ≤1
(2π|x|)q ‖f(q)‖1
et on obtient alors ∣∣∣∣∣
∫
IR
f(t) dt− 1
N
∞∑
k=−∞f
(k
N
)∣∣∣∣∣ ≤‖f (q)‖1
N q
∑
k 6=0
1
kq
d’où le résultat.
Remarque 2.1.3.Attention il faut quand même se méfier de l’apparente beauté de la majoration.Même si l’on peut obtenir n’importe quelle vitesse de convergence polynômiale, la constanteCqobtenue tend elle aussi très vite vers l’infini ! Elle est en fait de l’ordre deq! pour les fonctions quasi-analytiques...
2.2 Formule des compléments :
Le but de cet exercice est d’obtenir la formule des complémenents par une méthode élémentaire.
Lemme2.2.1. Pourn, q ∈ IN avecn ≥ 0, 2q − n ≥ 2, on a :∫ ∞
0
xn
1 + x2qdx =
π
2q sin(π(n+1)
2q
)
Preuve :Voir [Tau1].
Lemme2.2.2. Pourα ∈]0; 1[, on a :∫ ∞
0
x−α
1 + xdx =
−πsin(πα)
CHAPITRE 2. ANALYSE 12
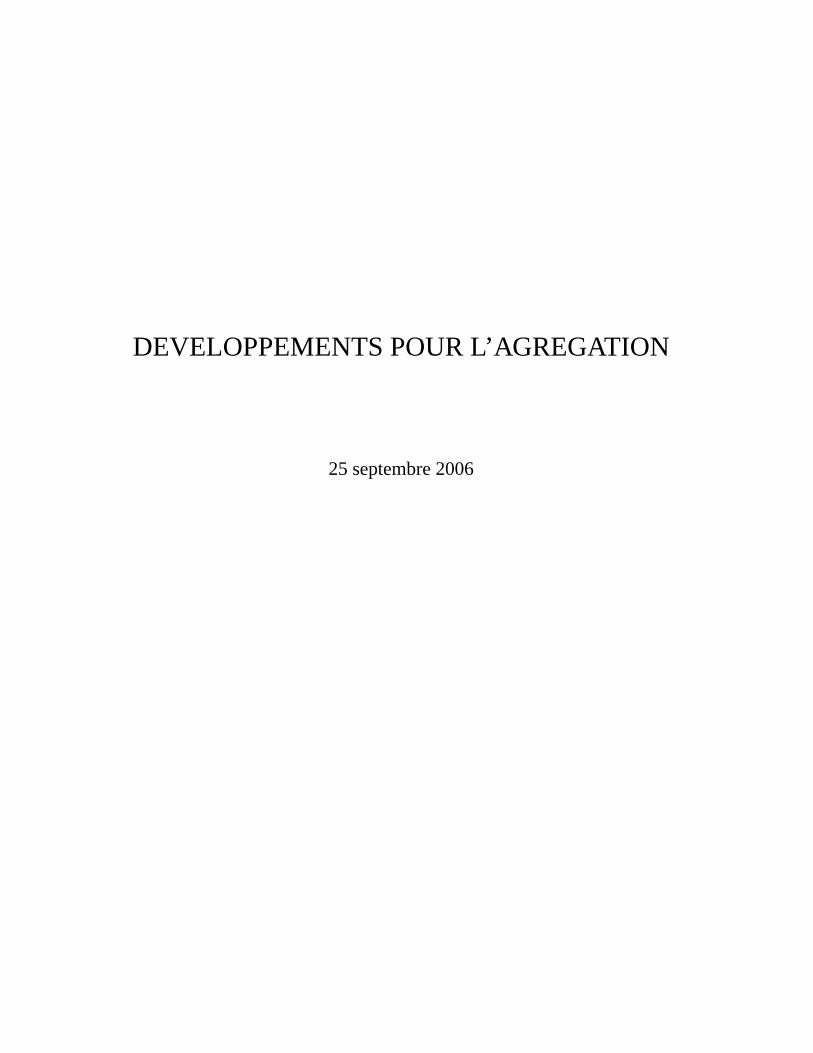
Preuve :Soitα ∈]0; 1[∩ IQ. On écritα = p
qavecp, q ≥ 1 et q − p ≥ 1 (carα = p
q< 1). On a :
∫ ∞
0
x−α
1 + xdx =
∫ ∞
0
x−2p2q
1 + xdx
= 2q
∫ ∞
0
u2q−2p−1
1 + u2qdu ( avecu = x1/(2q))
= 2q × π
2q sin(π(2q−2p−1+1)
2q
) vu le lemme 2.2.1
=−π
sin(πα)
On obtient alors :
∀α ∈ IQ,
∫ ∞
0
x−α
1 + xdx =
−πsin(πα)
or ces deux fonctions étant continues sur]0; 1[ (appliquer le théorème de continuité sous l’intégraleavec majoration sur tout compact) et coïncident sur]0; 1[∩ IQ donc sont égales sur]0; 1[ par densité etcontinuité.
Remarque 2.2.3.L’intérêt d’utiliser la continuité de l’intégrale paramétrée et non l’holomorphieest (outre le fait de ne rien admettre sur la fonctionΓ bien que l’holomorphie ne soit pas bien dureà montrer) d’utiliser nécessairement la densité deIQ dans ]0; 1[ pour dire que les deux fonctionscoïncident (et donc de pouvoir mettre ceci dans la leçon sur les parties denses) alors qu’un argumentd’holomorphie ne demande qu’un point d’accumulation pour avoir l’égalité des deux fonctions et nenécessite donc pas d’arguments de densité.
Théorème2.2.4. formule des compléments :Si∀x > 0,Γ(x) =∫∞0tx−1e−t dt désigne la fonction
Γ d’Euler, on a :∀x ∈]0; 1[, Γ(x)Γ(1 − x) =
π
sin(πx)
Preuve :Soit z ∈]0; 1[, on a :
Γ(z)Γ(1 − z) =
∫ ∞
0
∫ ∞
0
xz−1y−ze−x−y dx dy
=
∫
IR2+
(yx
)−ze−x(1+ y
x) 1
xdx dy
=
∫
IR2+
f ϕ(x, y) | det(Jϕ)| dx dy

CHAPITRE 2. ANALYSE 13
où l’on a posé :
∀x, y ≥ 0, ϕ(x, y) =(x,y
x
)et ∀u, v ≥ 0, f(u, v) = v−ze−u(1+v)
En utilisant alors la formule de changement de variables dans les intégrales, on obtient :
Γ(z)Γ(1 − z) =
∫
IR2+
v−ze−u(1+v) du dv
On calcule alors cette double intégrale en intégrant d’abord par rapport àu puisv en utilisant le lemme2.2.2. Ceci donne :
Γ(z)Γ(1 − z) = −∫ ∞
0
v−z
1 + zdz
=π
sin(πz).
Remarque 2.2.5.Selon la leçon où tu places ce développement, tu peux alors bien sûr en déduirel’égalité pour toutz ∈ IC \ ZZ pour peu que tu aies placé quelque part la fait que la fonctionΓ se pro-longe en une fonction holomorphe surIC \ IN∗. Attention le simple prolongement àz ∈ IC;ℜ(z) > 0ne suffit pas car l’ensemble de définition deΓ(z)Γ(1−z) est alors la bandez ∈ IC; 0 < ℜ(z) < 1 ! ! !
2.3 Sur les inclusions des espacesLp :
Théorème2.3.1. On noteB = E ∈ A;µ(E) <∞. Sont équivalentes les conditions suivantes surun espace mesuré(Ω,A, µ).
1. Lp(µ) ⊃ Lq(µ) pour un couple(p, q) ∈ [1;∞[ oùp < q.
2. supE∈B
µ(E) <∞.
3. Lp(µ) ⊃ Lq(µ) pour tous les couples(p, q) ∈ [1,∞[ oùp < q.
Dans le cas où(Ω,A, µ) est un espace mesuréσ-fini alors la condition(2) devientµ(Ω) <∞.
Preuve :Voir [Rud] page146 pour les trois premières équivalences.
Dans le casσ-fini. Si µ(Ω) <∞ alors il est trivial de voir que l’on a(2).Réciproquement si l’on a(2). Soit(An)n une suite croissante de sous-ensembles mesurables deΩ
telle que ⋃
n
An = Ω et ∀n ∈ IN, µ(An) <∞
Alors vu (2), il existeM > 0 tel que∀E ∈ B, µ(E) ≤ M . Comme∀n ∈ IN, An ∈ B, on a∀n ∈ IN, µ(An) ≤M et en utilisant le théorème de la limite croissante on voit queµ(Ω) ≤M .

CHAPITRE 2. ANALYSE 14
Remarque 2.3.2.Attention aux erreurs dans le Rudin ! ! ! En effet il faut bien prendre le sup surBdans ce théorème comme le montre le contre-exemple :
Ω = 0; 1 etµ(0) = 1, µ(1) = ∞
Je ne mets pas non plus dans ce théorème les casp < 1 comme il est fait dans ce livre. En effet, ladémonstration précédente repose sur le théorème du graphe fermé. Or premièrement pourp < 1, Lp
n’est pas un espace normé donc ceci sort du cadre du programmede l’agrégation et plus sérieusementsi p < 1, dans la plupart des casLp n’est même pas localement convexe donc n’est pas un espace deFréchet, hypothèse qui je crois est essentielle dans la preuve du graphe fermé ! !
Théorème2.3.3. On noteM = E ∈ A;µ(E) > 0. Sont équivalentes les conditions suivantes surun espace mesuré(Ω,A, µ).
1. Lp(µ) ⊂ Lq(µ) pour un couple(p, q) ∈ [1;∞[ oùp < q.
2. infE∈M
µ(E) > 0.
3. Lp(µ) ⊂ Lq(µ) pour tous les couples(p, q) ∈ [1,∞[ oùp < q.
Dans le cas où(Ω,A, µ) est un espace mesuréσ − fini ces conditions sont équivalentes au faitqueΩ est à un ensemble de mesure nulle près une réunion dénombrable d’atomes(Xn)n telle que∀n ∈ IN, µ(Xn) ≥ d > 0.
Preuve :Toujours [Rud] page146 pour les trois premières équivalences.
Ensuite je rappelle qu’un atomeX est un sous-ensemble mesurable deΩ tel queµ(X) > 0 etpour tout sous-ensembleX ′ deX mesurable tel queµ(X ′) < µ(X) on aµ(X ′) = 0. Il résulte de ladéfinition que deux atomes sont à un ensemble de mesure nulle près disjoints où égaux. Soit(Xi)i∈Iune famille de représentants des différents atomes deΩ aux ensembles de mesure nulle près, ie∀Xatome deΩ, il existe un uniquei ∈ I tel queX = Xi à un ensemble de mesure nulle près.
On va montrer queI est dénombrable. Soit(An)n une suite croissante de sous-ensembles mesu-rables deΩ telle que ⋃
n
An = Ω et ∀n ∈ IN, µ(An) <∞.
SoitCn l’ensemble desi ∈ I tels queXi ⊂ An à un ensemble de mesure nulle près et
d = infE∈M
µ(E)
(d > 0). Si i1, . . . , ir ∈ Cn alors lesXi1 , . . . , Xir étant disjoints, on a
rd ≤ µ(Xi1) + · · · + µ(Xir) ≤ µ(An)
doncCard(Cn) ≤ µ(An)d
doncCn est fini. D’autre part, on a
I =⋃
n∈IN
Cn.

CHAPITRE 2. ANALYSE 15
En effet sii ∈ I, par le théorème de convergence croissante on a
µ(An ∩Xi)n→∞−→ µ(Xi)
orXi étant un atome on aµ(Xi ∩ An) = µ(Xi) ou0 donc la suite(µ(An ∩Xi))n est stationnaire etconverge versµ(Xi). Par suite il existen ∈ IN tel queµ(An∩Xi) = µ(Xi) etXi ⊂ An à un ensemblede mesure nulle près⇒ i ∈ Cn. FinalementI est une réunion dénombrable d’ensembles finis doncest lui-même dénombrable. Par la suite on prendI = IN.
On va montrer⋃nXn = Ω à un ensemble de mesure nulle près. Pour cela on pose
M = Ω \⋃
n∈IN
Xn
(M est mesurable). Si par l’absurdeµ(M) > 0 alors on aµ(M) > d etM ne contenant pas d’atomesil existe un sous-ensemble mesurableM ′
1 deM de mesure non nulle et strictement positive. Quitte àremplacerM1 parM \M1 on peut supposerµ(M1) ≤ µ(M)
2. En itérant ce raisonnement on construit
une suiteMn de sous-ensembles mesurables deM tels que
µ(Mn) > 0 et µ(Mn) ≤µ(M)
2n.
Or ceci est une contradiction car d’un coté on obtientµ(Mn) → 0 et d’un autre on a
µ(Mn) > 0 ⇒ µ(Mn) ≥ d > 0.
DoncM est bien de mesure nulle.
Réciproquement s’il existe une suite(Xn)n d’atomes disjoints deΩ telle que
∀n, µ(Xn) ≥ d > 0 etµ
(Ω \
⋃
n
Xn
)= 0
alors on obtient facilement la condition(2) vu que tout sous-ensemble mesurable deΩ est à un en-semble de mesure nulle près une réunion au plus dénombrable de ces atomes.
Remarque 2.3.4.La dernière condition signifie que l’espace est en un certainsens isomorphe à unL1(IN;P(IN);µ) oùµ est une mesure surIN telle que∀n, µ(n) ≥ d > 0 (où bien à un sous-ensemblefini deIN, ceci étant également possible).
D’autre part, le raisonnement effectué dans la dernière partie du théorème est typique de ceuxutilisé dans les questions de dénombrabilité (points de discontinuité des fonctions monotones, famillessommables,...) et donc il me semble intéressant pour la leçon sur la dénombrabilité.

CHAPITRE 2. ANALYSE 16
2.4 Premier théorème de Hardy pour les intégrales
Rappels : Soitf ∈ C0bPM(IR+), on définit sa transformée de Laplace par
∀λ > 0,L(λ) =
∫ ∞
0
f(u)e−λu du
Le fait de supposerf bornée sert juste à s’assurer que l’intégrale définie ci-dessus converge bien pourλ > 0.
Théorème2.4.1. Premier théorème de Hardy :Soitf ∈ C0
bPM(IR+) telle que
∃l ∈ IR,L(λ)λ→0+
−→ l.
On suppose de plus que
f(t) = o
(1
t
).
Alors ∫ ∞
0
f(u) du converge et vautl.
Preuve :On remarque tout d’abord que :
t|f(t)| = o(1) ⇒ 1
t
∫ t
0
u|f(u)| du = o(1)(Csaro).
On a∀λ > 0 (on utilise :∀u, 0 ≤ u ≤ 1 ⇒ 1 − e−u ≤ u) :∣∣∣∣∣
∫ 1λ
0
f(u) du−∫ ∞
0
f(u)e−λu du
∣∣∣∣∣ =
∣∣∣∣∣
∫ 1λ
0
f(u)(1 − e−λu) du+
∫ ∞
1λ
f(u)e−λu du
∣∣∣∣∣
≤ λ
∫ 1λ
0
|f(u)|u du+
∫ ∞
1λ
|uf(u)|e−λu
udu
≤ λ
∫ 1λ
0
|f(u)|u du+ sup[1/λ;∞[
|uf(u)|∫ ∞
1λ
e−λu
udu
≤ λ
∫ 1λ
0
|f(u)|u du+ sup[1/λ;∞[
|uf(u)|∫ ∞
1
e−u
udu
λ→0+
−→ 0
Donc∫∞
0f(u) du converge et vautl. (Commetf(t) = o(1), on a biensup[1/λ;∞[ |uf(u)| = o(1)).

CHAPITRE 2. ANALYSE 17
2.5 Deuxième théorème de Hardy pour les intégrales
Théorème2.5.1. Deuxième théorème de HardySoitf ∈ C0
bPM(IR+) telle que
∃l ∈ IR,L(λ)λ→0+
−→ l.
On a alors l’équivalence :
∫ ∞
0
f(u) du converge et vautl ⇔∫ t
0
uf(u) du = o(t).
Preuve :On suppose dans un premier temps quel = 0. On posa aussi
a(t) =
∫ t
0
f(u) du et b(t) =
∫ t
0
uf(u) du
Si∫∞
0f(u) du converge et vaut0, on aa(t) = o(1). En faisant une IPP, on a :
∫ t
0
uf(u) du = [ua(u)]t0 −∫ t
0
a(u) du
Or ta(t) = o(t) cara(t) = o(1) et (Césaro)∫ t
0a(u) du = o(t) d’où la première implication.
Réciproquement, en faisant une IPP dans les intégrales à support compact et en passant à la limite,on obtient :
∫ ∞
1
f(u)e−λu du =
∫ ∞
1
uf(u)e−λu
udu
=
[b(u)
e−λu
u
]∞
1
−∫ ∞
1
b(u)−λe−λuu− e−λu
u2du
= −b(1)e−λ + λ
∫ ∞
1
b(u)
ue−λu du+
∫ ∞
1
b(u)
u2e−λu du
Par hypothèse, on a∫∞
1f(u)e−λu du
λ→0+
→ −∫ 1
0f(u) du.
Puis−b(1)e−λλ→0+
→ −b(1).Ensuite, utilisant le premier théorème de Hardy et la fait que b(u)
u2 = o(
1u
), on a que
∫ ∞
1
b(u)
u2e−λu du
λ→0+
→∫ ∞
1
b(u)
u2du
et l’on sait aussi que cette dernière intégrale est convergente.

CHAPITRE 2. ANALYSE 18
Seul le dernier terme nécessite un peu de travail. On va montrer qu’il tend vers0. Soit ε > 0.
Commeb(u)u
= o(1) il existeA > 0 tel que∀t ≥ A, sup[t,∞[
∣∣∣∣b(u)
u
∣∣∣∣ ≤ε
2. Ensuite il existeδ > 0,∀λ ≤
δ, λ∫ A
1
∣∣∣ b(u)u∣∣∣ du ≤ ε
2. On a alors :
∣∣∣∣λ∫ ∞
1
b(u)
ue−λu du
∣∣∣∣ ≤ λ
∫ A
1
∣∣∣∣b(u)
ue−λu
∣∣∣∣ du+ sup[A;∞[
∣∣∣∣b(u)
u
∣∣∣∣∫ ∞
0
λe−λu du
≤ λ
∫ A
1
∣∣∣∣b(u)
u
∣∣∣∣ du+ sup[A;∞[
∣∣∣∣b(u)
u
∣∣∣∣× 1
≤ ε
En passant à la limite dans l’égalité qu’on avait obtenue on adonc
(2.1) −∫ 1
0
f(u) du = −b(1) +
∫ ∞
1
b(u)
u2du
Soit r > 1 en faisant une IPP, on obtient∫ r
1
b(u)
u2du =
[−b(u)u
]r
1
−∫ r
1
uf(u)
−u du
et en passant à la limite enr∞ (possible car l’on sait que l’intégrale de gauche converge et queb(u)u
= o(1)) on a que l’intégrale def converge et :∫ ∞
1
b(u)
u2du = b(1) +
∫ ∞
1
f(u) du
En combinant avec (2.1) on trouve∫∞
0f(u) du = 0.
Pour passer au casl 6= 0 on applique ce qui précède àg(u) = f(u) − le−u car on a bien
Lg(λ) = Lf (λ) − l
1 + λ
λ→0+
−→ 0
et le fait d’ajouter une exponentielle ne modifie pas les conditions sur les équivalents car elle estnégligeable devant ceux considérés.
Remarque 2.5.2.Ce théorème s’applique très bien à la fonctionsin(t)t
.D’autre part tu peux avoir exactement les mêmes énoncés pourles séries entières avec les mêmes
démonstrations pour peu que tu remplaçes les intégrales pardes séries, les transformées de Laplacepar des séries entières, la limiteλ → 0+ par la limite z → 1− et les IPP par les transformationsd’Abel.
2.6 Calcul desξ(2k)
Le but de cet exercice est de donner une expression explicitepour la fonctionξ de Riemann surles entiers pairs, c’est-à-dire de calculer pourk ∈ IN∗
ξ(2k) =∞∑
n=1
1
n2k.

CHAPITRE 2. ANALYSE 19
On commence par démontrer le
Lemme2.6.1. La série de fonctions
1
απ+
∞∑
n=1
2α
α2 + n2
converge simplement surIR \ ZZ vers la fonctionα 7→ cotan(απ).
Preuve : Soitα 6∈ ZZ. Calculons les coefficients de Fourier de la focntion2π-périodique définie sur[−π;π] part 7→ cos(αt). Cette fonction est paire, on calcule donc pourn ≥ 1
an =2
π
∫ π
0
cos(αt) cos(nt) dt
=1
π
∫ π
0
(cos((α+ n)t) + cos((α− n)t)) dt
=1
π
(sin((α+ n)π)
α+ n+
sin((α− n)π)
α− n
)
=2α(−1)n sin(απ)
π(α2 − n2)
On vérifie d’autre part quea0 =sin(απ)
απ. Comme la fonctiont 7→ cos(αt) est continue et de classe
C1 par morceaux, elle est la somme de sa série de Fourier. Donc∀t ∈ [−π;π]
cos(αt) =sin(απ)
απ+
∞∑
n=1
2α(−1)n sin(απ)
π(α2 − n2)cos(nt).
En prenantt = π et en divisant l’égalité obtenue parsin(απ), on a pourα 6∈ ZZ
πcotan(απ) − 1
α=
∞∑
n=1
2α
α2 − n2
Remarque 2.6.2.En fait, la série ci-dessus converge normalement sur tout sous-ensemble compactdeIR \ ZZ mais nous ne l’utiliserons pas pour la suite.
Si 0 ≤ α < 1, on a
∞∑
n=1
2α
α2 − n2=
∞∑
n=1
−2α
n2
1
1 − (α/n)2
=∞∑
n=1
∞∑
k=0
−2α
n2
α2k
n2k
= −2∞∑
k=1
α2k−1ξ(2k)
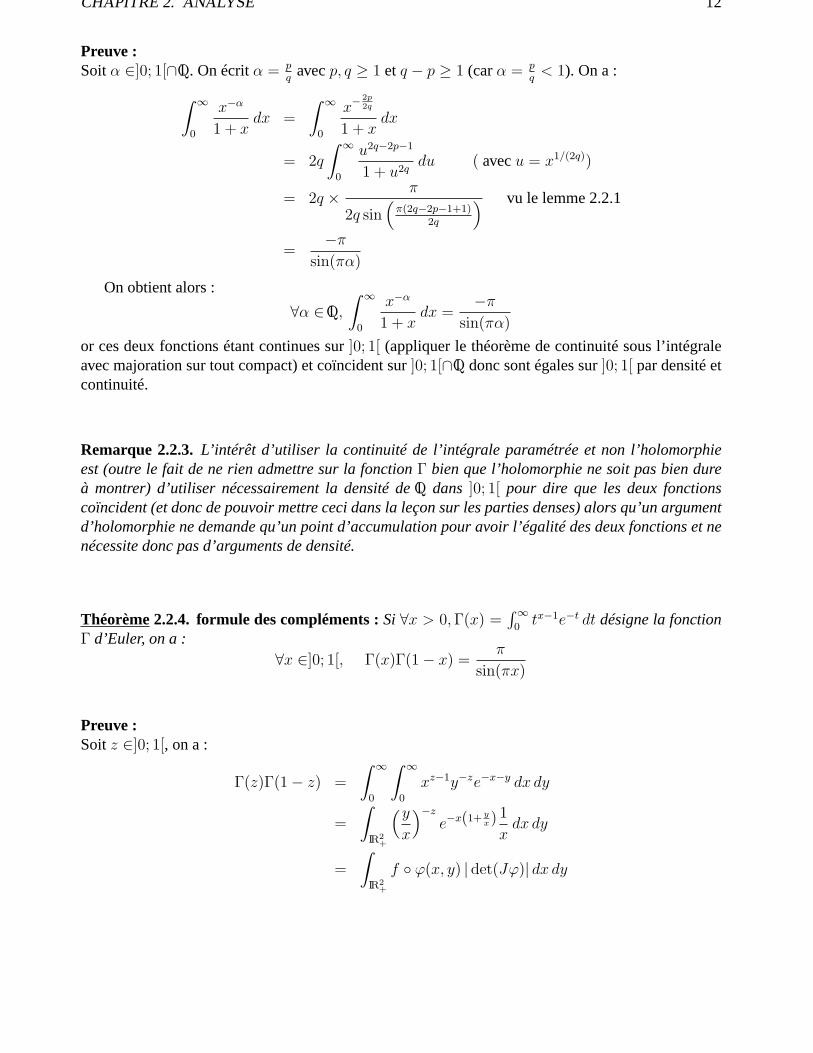
CHAPITRE 2. ANALYSE 20
Les séries ci-dessus ont pu être inversées car elles sont à termes positifs. Cette expression nous donnele développement limité en zéro de la fonction∅ 7→ πcotan(πα) − 1
α. Il ne reste plus qu’à calcu-
ler de façon explicite les termes du développement limité decette fonction pour obtenir les valeurscherchées. Par exemple, à l’ordre 5 on a
πcotan(πx) − 1
x= −π
2
3x− π4
45x3 − 2
945x5 + o(x5)
d’où les valeurs suivantes
ξ(2) =π2
6, ξ(4) =
π4
90, ξ(6) =
π6
945
2.7 Intégrales à dérivée non intégrable
Nous allons maintenant traiter une intégrale paramétrée dont la dérivée de l’intégrand par rapportau paramètre n’est pas intégrable mais pseudo-intégrable.
Exercice2.7.1. Calcul de l’intégrale paramétréex 7→ G(x) =
∫ ∞
0
sin(tx)
t(1 + t2)dt.
Réponse :On remarque tout d’abord que cette fonction est impaire, il suffit donc de la calculer pourx ≥ 0. L’idée est d’utiliser la méthode de l’équation différentielle. Les théorèmes généraux permettentfacilement de montrer queG est de classeC1 surIR et que
G′(x) =
∫ ∞
0
cos(tx)
1 + t2dt.
Le problème est que le candidat pour la dérivée seconde :−∫ ∞
0
t sin(tx)
1 + t2dt n’est pas intégrable mais
seulement pseudo-intégrable.On contourne cette difficulté en utilisant le lemme d’Abel pour les intégrales. Pour cela, on regarde
Hn(x) =
∫ n
0
cos(tx)
1 + t2dt.
Comme l’application(x, t) 7→ cos(tx)1+t2
et sa dérivée partielle par rapport àx : (x, t) 7→ t sin(tx)1+t2
sontcontinues surIR × [0;n], on en déduit que l’applicationHn est de classeC1 surIR et
H ′n(x) = −
∫ n
0
t sin(tx)
1 + t2dt.
On va maintenant appliquer le théorème sur la convergence localement uniforme des dérivées d’une
suite de fonctions. On remarque tout d’abord que la suiteHn converge simplement (vers∫ ∞
0
cos(tx)
1 + t2dt !).

CHAPITRE 2. ANALYSE 21
Il reste à établir la convergence locale uniforme desH ′n. Il est clair que la limite sera alors−
∫ ∞
0
t sin(tx)
1 + t2dt
(par définition !). C’est maintenant que l’on utilise le lemmed’Abel.Pour cela, on vérifie que∀q > p > 0, on a
∣∣∣∣∫ q
p
sin(tx) dt
∣∣∣∣ ≤2
|x|
et que la fonctiont 7→ t1+t2
est décroissante surIR+. Le lemme d’Abel assure alors que
∀q, p ∈ IN, q > p, |H ′q(x) −H ′
p(x)| ≤∣∣∣∣∫ q
p
t sin(tx)
1 + t2dt
∣∣∣∣ ≤2p
|x|(1 + p2).
Ainsi pour toutδ > 0, on a
sup[δ;+∞[
|H ′q(x) −H ′
p(x)| ≤2p
δ(1 + p2)→ 0
lorsquemin(p, q) → 0 et on a alors montré la convergence locale uniforme de la suite (H ′n)n vers∫ ∞
0
t sin(tx)
1 + t2dt. On en déduit que la suite(Hn)n converge localement uniformément versG′, G′ est
de classeC1 surIR∗+ et
G”(x) = −∫ ∞
0
t sin(tx)
1 + t2dt.
Il est maintenant facile de voir queG est solution de l’équation différentielle suivante :
∀x > 0, G”(x) −G(x) = −∫ ∞
0
sin(tx)
tdt = −π
2.
On en déduit qu’il existe deux constantesC1 etC2 telles que
∀x > 0, G(x) = C1ex + C2e
−x +π
2.
Il est clair queG est borné doncC1 = 0. D’autre part,G est continue en 0 etG(0) = 0, d’oùC2 = −π2
et finalementG(x) =
π
2(1 − e−x).
Chapitre 3
Probabilités
3.1 Grandes déviations, inégalités de Hoeffding, Bernstein et Ben-nett
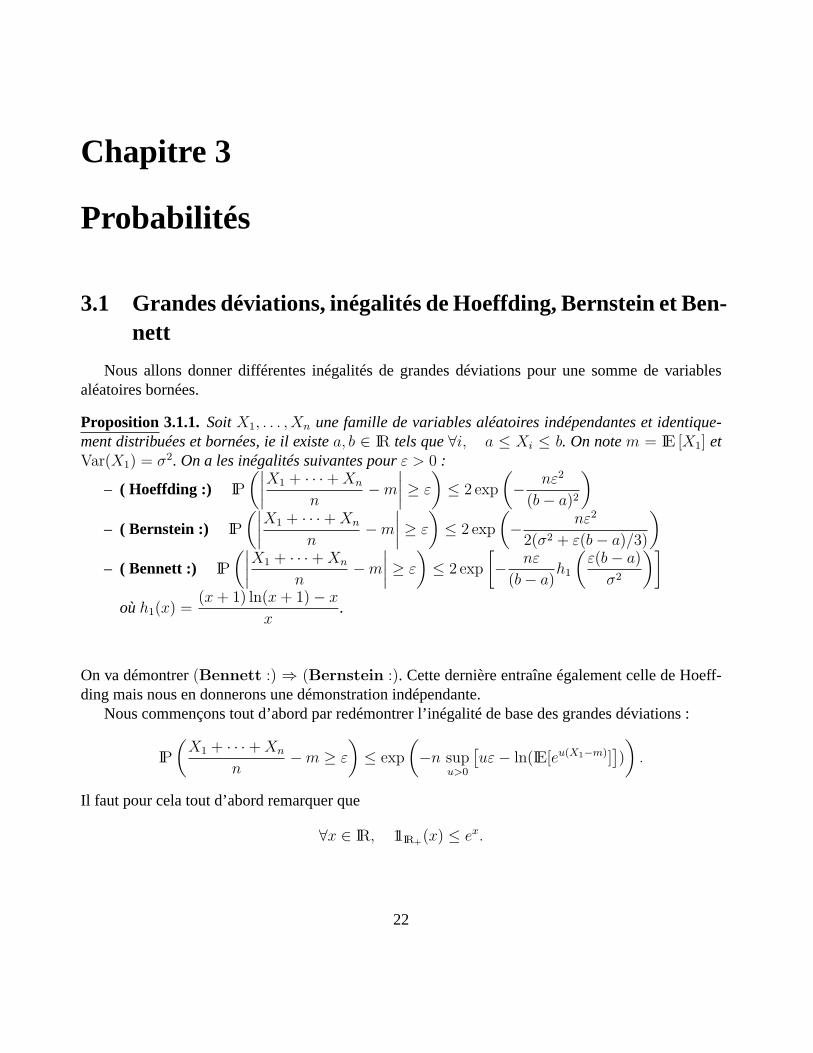
Nous allons donner différentes inégalités de grandes déviations pour une somme de variablesaléatoires bornées.
Proposition 3.1.1. SoitX1, . . . , Xn une famille de variables aléatoires indépendantes et identique-ment distribuées et bornées, ie il existea, b ∈ IR tels que∀i, a ≤ Xi ≤ b. On notem = IE [X1] etVar(X1) = σ2. On a les inégalités suivantes pourε > 0 :
– ( Hoeffding :) IP
(∣∣∣∣X1 + · · · +Xn
n−m
∣∣∣∣ ≥ ε
)≤ 2 exp
(− nε2
(b− a)2
)
– ( Bernstein :) IP
(∣∣∣∣X1 + · · · +Xn
n−m
∣∣∣∣ ≥ ε
)≤ 2 exp
(− nε2
2(σ2 + ε(b− a)/3)
)
– ( Bennett :) IP
(∣∣∣∣X1 + · · · +Xn
n−m
∣∣∣∣ ≥ ε
)≤ 2 exp
[− nε
(b− a)h1
(ε(b− a)
σ2
)]
oùh1(x) =(x+ 1) ln(x+ 1) − x
x.
On va démontrer(Bennett :) ⇒ (Bernstein :). Cette dernière entraîne également celle de Hoeff-ding mais nous en donnerons une démonstration indépendante.
Nous commençons tout d’abord par redémontrer l’inégalité de base des grandes déviations :
IP
(X1 + · · · +Xn
n−m ≥ ε
)≤ exp
(−n sup
u>0
[uε− ln(IE[eu(X1−m)]
])
).
Il faut pour cela tout d’abord remarquer que
∀x ∈ IR, 11IR+(x) ≤ ex.
22

CHAPITRE 3. PROBABILITÉS 23
Il vient pour toutu > 0
IP
(X1 + · · · +Xn
n−m ≥ ε
)= IP (u(X1 −m) + · · · + u(Xn −m) − unε ≥ 0)
≤ IE [exp (u(X1 −m) + · · · + u(Xn −m) − unε)]
= e−nuε(IE[eu(X1−m)
])n
= exp(−n(uε− ln(IE
[eu(X1−m)
])))
Il suffit alors de prendre lesup pour lesu > 0.
Preuve de l’inégalité de Hoeffding :Quitte à remplacerXi parXi−m pouri = 1, . . . , n on peut supposer queXi est d’espérance nulle.
Posonsϕ(u) = IE[euX1
]. En appliquant deux fois le théorème de dérivation sous le signe somme, on
obtient
ϕ”(u) =IE[X2
1euX1]IE [euX1] − IE
[X1e
uX1]2
IE [euX1 ]2
= IE
[X2
1
euX1
IE [euX1 ]
]− IE
[X1
euX1
IE [euX1 ]
]2
= VareIP(X1)
= VareIP
(X1 −
b+ a
2
)
≤ (b− a)2
4
où IP est une nouvelle probabilité ayant une densité par rapport àIP donnée par
dIP
dIP=
euX1
IE [euX1 ].
Pour la dernière des inégalités, on a utilisé le fait que−b− a
2≤ X1 −
b+ a
2≤ b− a
2.
Ainsi en intégrant deux fois, on a :
ϕ(u) ≤ ϕ(0) + uϕ′(0) +(b− a)2
4u2 =
(b− a)2
4u2.
Pour toutε > 0, on a alors
uε− ln IE[euX1
]≥ uε− u2 (b− a)2
4
Il est alors clair que lesup de l’inégalité de droite est atteint enu =2ε
(b− a)2et vaut
ε2
(b− a)2et ceci
établit le résultat.

CHAPITRE 3. PROBABILITÉS 24
Preuve de l’inégalité de Bennett :Quitte à remplacerXi parXi − m on peut supposer que les variablesXi, i = 1, . . . , n sont
d’espérance nulle. Il suffit alors de montrer le résultat pour b = 1 et d’appliquer ceci àXi/(b − a).Nous supposerons donc également queb = 1.
On pose pourt > 0, Φ(t) =et − 1 − t
t2. Cette fonction est croissante surIR∗
+, on a donc pour tout
u ≥ 0, Φ(uX) ≤ Φ(u), d’où
∀u > 0, euX − 1 − uX ≤ X2(eu − 1 − u)
et en prenant l’espérance :IE[euX]− 1 ≤ σ2(eu − 1 − u),
d’oùln(IE
[euX]) ≤ ln
(1 + σ2(eu − 1 − u)
)≤ σ2(eu − 1 − u)
etuε− ln(IE
[euX]) ≥ σ2[u(ε/σ2 + 1) − eu − 1].
Posons maintenantϕ(t) = t(ε/σ2 + 1) − et − 1. Il est facile de voir queϕ atteint son maximum ent0 = ln
(1 + ε
σ2
), ce qui donne
supu>0
(uε− ln(IE[euX])) ≥ εh1
( εσ2
)
avech1(x) =(x+ 1) ln(x+ 1) − x
x.
En appliquant ce résultat à la famille(−Xi)1≤i≤n, on obtient également
IP
(X1 + · · · +Xn
n−m ≥ −ε
)≤ exp
(− nε
b− ah1
(ε(b− a)
σ2
)),
d’où le résultat.
Preuve de l’inégalité de Bernstein :On déduit cette inégalité de la précédente en vérifiant que :
∀x > 0,(x+ 1) ln(x+ 1) − x
x≥ x
2(1 + x/3).
Pour cela, on poseψ(x) = 2(1 + x/3)[(x+ 1) ln(1 + x) − x] − x2
et on voit queψ”(x) =4
3
(ln(1 + x) +
1
1 + x− 1
)est croissante (ψ(3)(x) ≥ 0) etψ”(0) = 0 donc
on aψ” ≥ 0. Commeψ′(0) = 0, on a égalementψ′ ≥ 0 et pour finirψ(0) = 0 donneψ ≥ 0 etl’inégalité est démontrée.
Remarque 3.1.2.Ces inégalités permettent de déterminer des intervalles de confiance non asympto-tiques assez proches de celui obtenu par approximation normale (TCL) pour des variables aléatoiresbornées. Par exemple, pour des variables de Bernouilli de paramètrep = 0.5 et pour une précisionε = α = 0.05, on obtient les tailles d’échantillon suivantes :

CHAPITRE 3. PROBABILITÉS 25
– Tchebychev :n =1
4αε2= 2000.
– Approximation normale :n = 385
– Hoeffding :n = − ln(α/2)
ε2= 1475.
– Bernstein :n = −2(σ2 + ε/3) ln(α/2)
ε2= 787.
– Bennett :n = − ln(α/2)
εh1(4ε)= 785.
Faire un graphe.
3.2 Arrivées poissoniennes et statistiques d’ordre
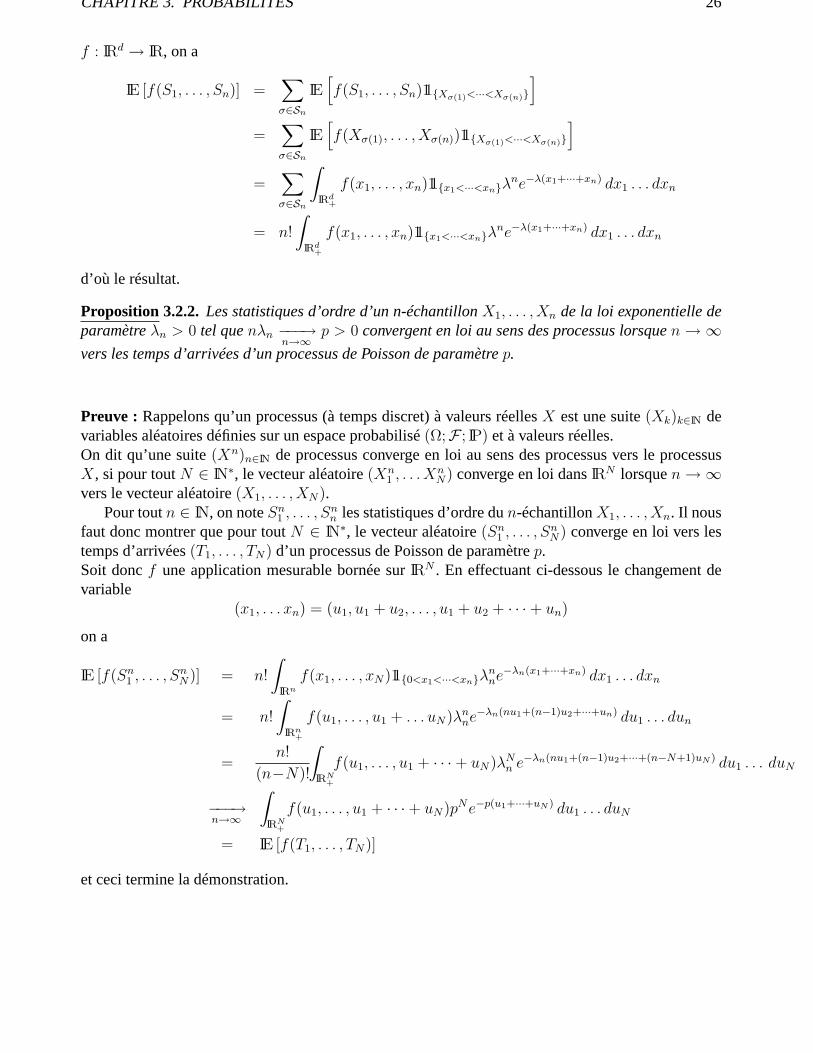
Les arrivées de clients dans des files d’attente ou bien les demandes de connexion dans des ré-seaux de communications sont souvent modélisées en probabilité par les temps de saut d’un processusde Poisson. Notre objectif va être de donner une justification mathématique à ce raisonnement. Nousallons donc montrer que les statistiques d’ordre de variables aléatoires indépendantes de paramètreλ > 0 convergent en loi vers les temps de saut d’un processus de Poisson. Ceci signifie intuitivementque si l’on suppose que les clients décident indépendammentles uns des autres de se rendre à leurmagasin (ou bien de téléphoner) selon une loi exponentiellede paramètreλ > 0, alors on peut ap-procher les instants successifs de leur arrivée au magasin (ou au réseau) par les temps d’arrivées d’unprocessus de Poisson.
Proposition 3.2.1. Soit X1, . . . , Xn des variables aléatoires indépendantes suivant une loi expo-nentielle de paramètreλ > 0. On noteS1, . . . , Sn le réarrangement croissant desXi, défini parS1 ≤ · · · ≤ Sn et S1; . . . ;Sn = X1; . . . ;Xn. Les variables aléatoiresS1, . . . , Sn sont appeléesles statistiques d’ordre du n-échantillonX1, . . . , Xn. Le vecteur aléatoire(S1, . . . , Sn) admet unedensité par rapport à la mesure de Lebesgue surIRn donnée par
n!λn110<x1<x2<···<xn(x)e−λx1−···−λxn .
Preuve : Remarquons tout d’abord que, les variablesX1, . . . , Xn étant à densité, on a pouri 6= j,IP (Xi = Xj) = 0. On peut donc partitionner l’espace de la façon suivante
1 =∑
σ∈Sn
11Xσ(1)<···<Xσ(n)
oùSn désigne l’ensemble des permutations àn éléments. Ainsi pour une application mesurable bornée
CHAPITRE 3. PROBABILITÉS 26
f : IRd → IR, on a
IE [f(S1, . . . , Sn)] =∑
σ∈Sn
IE[f(S1, . . . , Sn)11Xσ(1)<···<Xσ(n)
]
=∑
σ∈Sn
IE[f(Xσ(1), . . . , Xσ(n))11Xσ(1)<···<Xσ(n)
]
=∑
σ∈Sn
∫
IRd+
f(x1, . . . , xn)11x1<···<xnλne−λ(x1+···+xn) dx1 . . . dxn
= n!
∫
IRd+
f(x1, . . . , xn)11x1<···<xnλne−λ(x1+···+xn) dx1 . . . dxn
d’où le résultat.
Proposition 3.2.2. Les statistiques d’ordre d’un n-échantillonX1, . . . , Xn de la loi exponentielle deparamètreλn > 0 tel quenλn −−−→
n→∞p > 0 convergent en loi au sens des processus lorsquen → ∞
vers les temps d’arrivées d’un processus de Poisson de paramètrep.
Preuve : Rappelons qu’un processus (à temps discret) à valeurs réellesX est une suite(Xk)k∈IN devariables aléatoires définies sur un espace probabilisé(Ω;F ; IP) et à valeurs réelles.On dit qu’une suite(Xn)n∈IN de processus converge en loi au sens des processus vers le processusX, si pour toutN ∈ IN∗, le vecteur aléatoire(Xn
1 , . . . XnN) converge en loi dansIRN lorsquen → ∞
vers le vecteur aléatoire(X1, . . . , XN).Pour toutn ∈ IN, on noteSn1 , . . . , S
nn les statistiques d’ordre dun-échantillonX1, . . . , Xn. Il nous
faut donc montrer que pour toutN ∈ IN∗, le vecteur aléatoire(Sn1 , . . . , SnN) converge en loi vers les
temps d’arrivées(T1, . . . , TN) d’un processus de Poisson de paramètrep.Soit doncf une application mesurable bornée surIRN . En effectuant ci-dessous le changement devariable
(x1, . . . xn) = (u1, u1 + u2, . . . , u1 + u2 + · · · + un)
on a
IE [f(Sn1 , . . . , SnN)] = n!
∫
IRn
f(x1, . . . , xN)110<x1<···<xnλnne
−λn(x1+···+xn) dx1 . . . dxn
= n!
∫
IRn+
f(u1, . . . , u1 + . . . uN)λnne−λn(nu1+(n−1)u2+···+un) du1 . . . dun
=n!
(n−N)!
∫
IRN+
f(u1, . . . , u1 + · · · + uN)λNn e−λn(nu1+(n−1)u2+···+(n−N+1)uN ) du1 . . . duN
−−−→n→∞
∫
IRN+
f(u1, . . . , u1 + · · · + uN)pNe−p(u1+···+uN ) du1 . . . duN
= IE [f(T1, . . . , TN)]
et ceci termine la démonstration.

CHAPITRE 3. PROBABILITÉS 27
3.3 Comportement asymptotique d’une action
Le modèle discret proposé par Black et Scholes pour décrire l’évolution des cours d’un actif risquéne distribuant pas de dividendes (une action de prixSn au tempsn) est le suivant : on suppose queSnvérifie la relation suivante :
Sn = Sn−1 + µSn−1 + σSn−1εnS0 = s0,
où s0 > 0, σ etµ vérifient la relation|σ| < 1 + µ, (εn)n est une suite de variables aléatoires idépen-dantes équidistribuées de loi
1
2δ−1 +
1
2δ1.
Le paramètreσ est appelé " volatilité " et le termeσSn−1εn représente une fluctuation aléatoire del’actif.
Posonsλ =√
(1 + µ)2 − σ2 et Sn =Snλn
. On remarque alors que les variables aléatoires
Vn = ln
(Sn
Sn−1
)= ln(1 + µ+ σεn) − ln(λ)
sont indépendantes équidistribuées et un calcul montre qu’elles sont d’espérance nulle. Le calcul dela variance donne :
υ2 def= IE
(
ln
(Sn
Sn−1
))2
=(ln(1 + µ− σ) − ln(λ))2 + (ln(1 + µ+ σ) − ln(λ))2
2
Le théorème de la limite centrale assure alors que
V1 + · · · + Vn√n
Loi−−−→n→∞
N (0; υ2).
En remarquant que
V1 + · · · + Vn√n
=ln( ˜Sn) − ln(s0)√
n
et en utilisant le fait que pour toute fonction continueϕ surIR et pour toute suite de variables aléatoires
(Yn)n convergeant en loi versY , la suite(ϕ(Yn))n converge en loi versϕ(Y ), on en déduit queSn1√n
converge en loi vers une loi log-normale de paramètres0 etυ2. Finalement, on a montré que
S1√n
n
[(1 + µ)2 − σ2]1
2√
n
Loi−−−→n→∞
eX
oùX est une variable aléatoire de loi normaleN (0; υ2).

CHAPITRE 3. PROBABILITÉS 28
3.4 Modèle de Cox, Ross et Rubinstein
Le modèle de Cox, Ross et Rubinstein est une version discrétiséedu modèle de Black et Scholescomposée il ya un actif à risque de prixSn à l’instantn, ≤ n ≤ N et un actif sans risqueS0
n de tauxd’inrérêtr fixé sur une période de temps de sorte que
S0n = (1 + r)n.
On suppose que l’actif risqué suit l’évolution suivante :
Sn+1 = Sn(1 + ξn+1),
où (ξn)n est une suite de variables aléatoires indépendantes et identiquement distribuées de loi
pδa + (1 − p)δb, −1 < a < r < b,
Si l’on suppose que les fluctuations de l’actif risque évoluent comme le cours de l’actif sans risque,ceci donne
1 + r = (1 + a)p+ (1 + b)(1 − p)
soit
p =b− r
b− a.
Une option surq actions avec échéance à la dateN et au prix d’exerciceK est un droit de pouvoiracheter, à la dateN , q actions au prixK par action si le cours de l’action à la dateN est supérieur àK ou bien de les acheter au cours coûtant ou bien de ne pas les acheter si le prix unitaire est inférieuràK. On noteraO(n,N, q,K) une telle option contractée à la date n. Le but va être de fixer un prixauquel cette option doit être vendue pour compenser l’avantage qu’elle représente. Comme ce prixpar action doit dépendre de la daten, du cours de l’action à cette date et qu’il est proportionnelà q,on le noteraPN(n, Sn). Le prix de l’option pourq actions sera alorsqPN(n, Sn).
Un des cas typique de ces situations est la signature de gros contrats entre deux entreprises de paysdifférents. Le montant du contrat est en général évalué par rapport au cours du dollar. Les entreprisesconcernées achètent alors ce genre d’options pour " s’assurer " contre les fluctuations du cours dudollar entre le moment où le contrat est signé et le moment où la prestation réalisée devra être payée.
Pour déterminer le prixPN(n, Sn), on fait le raisonnement suivant : au tempsN , l’acheteur del’option réalisera le profit(SN−K)+. Le vendeur doit donc recevoir au tempsn, une quantité d’argentqui lui permettra de payer la richesse(SN −K)+ à l’acheteur. Ceci nous donne
PN(n, Sn) = (1 + r)−(N−n)IE[(SN −K)+ |Sn
]
= (1 + r)−(N−n)IE
(Sn
N∏
i=n+1
(1 + ξi) −K
)
+
∣∣∣Sn
= (1 + r)−(N−n)
N−n∑
i=0
CiN−np
i(1 − p)N−n−i (Sn(1 + a)i(1 + b)N−n−i −K)+

CHAPITRE 3. PROBABILITÉS 29
On va maintenant utiliser la procédure suivante pour fixer leprix de l’option à une échéanceT .L’idée est de faire tendre le pas de temps de ce modèle discretvers0. Pour cela, on fait tendreN versl’infini en imposant les relations suivantes :
r =RT
N, ln
1 + a
1 + r= − σ√
N, et ln
1 + b
1 + r=
σ√N.
Le paramètreR désigne le taux d’intérêt instantané entre les instants0 etT :
eRT = limN→∞
(1 + r)N ,
etσ2 est la variance limite de la variable aléatoirelnSN lorsqueN tend vers l’infini,SN représentantle cours de l’action à la dateT .
Rappel : Soit (YN)N une suite de variables aléatoires de la forme
YN = XN1 + · · · +XN
N
où∀N ∈ IN, les variables aléatoiresXN1 , . . . , X
NN sont indépendantes équidistribuées et à valeurs dans
[−σ/√N ;σ/
√N ], de moyenneµN telle que lim
N→∞NµN = µ et de varianceσ2
N telle que limN→∞
Nσ2N = σ2,
alors la suite(YN)N converge en loi vers une loi normale d’espéranceµ et de varianceσ2. Il suffitpour le voir de calculer la fonction caractéristique deYN :
IE[eitYN
]=
N∏
j=1
IE[eitX
Nj
]
= (IE[eitX
N1
])N
=
(1 + it
NµNN
− t2Nσ2N
2N+ o(1/N)
)N
−−−→N→∞
exp(itµ− t2σ2/2).
On pose alors pourN ∈ IN et1 ≤ j ≤ N ,
XNj = ln
1 + ξNj1 + r
etYN =N∑
j=1
XNj .

CHAPITRE 3. PROBABILITÉS 30
LesXNj sont bien à valeurs dans[−σ/
√N ;σ/
√N ], indépendantes et équidistribuées, d’espérance
IE[XN
1
]= p ln
1 + a
1 + r+ (1 − p)
1 + b
1 + r
= (1 − 2p)σ√N
=
(1 − 2
b+11+r
− 1b+11+r
− 1+a1+r
)σ√N
=
(1 − 2
eσ/√N − 1
eσ/√N − e−σ/
√N
)σ√N
N∞∼ − σ2
2Net de variance
IE[(XN
1 )2]− (IE
[XN
1
])2 =
σ2
N− (IE
[XN
1
])2
N∞∼ σ2
N
En appliquant le rappel précédent, on voit que(YN)N converge en loi vers une loi normaleN (µ;σ2).Si l’on noteϕ(y) = (s0e
y − e−RTK)+, on a
|C(0, s0) − IE [ϕ(YN)] | = |IE[(1 + r)−N (SN −K)+
]− IE [ϕ(YN)] |
= IE[(s0e
YN −K(1 +RT/N)−N)+
]
≤ K|e−RT − (1 +RT/N)−N |On ne passe pas directement à la limite pourIE [ϕ(YN)] carϕ n’est pas bornée. Par contre, on remarqueque
IE [ϕ(YN)] = IE[(SN −Ke−RT )+
]
= IE[SN −Ke−RT
]− IE
[(Ke−RT − SN)+
]
= s0 −Ke−RT − IE[(Ke−RT − SN)+
]
−−−→N→∞
s0 −Ke−RT − 1√2πσ
∫
IR
(Ke−RT − s0ey)+e
− (y+σ2/2)2
2σ2 dy
Finalement, le prixP (0, s0) de l’option est donnée par
P (0, s0) = limN→∞
PN(0, s0) =1√2πσ
∫
IR
(s0ey −Ke−RT )+e
− (y+σ2/2)2
2σ2 dy.
3.5 Construction d’une suite de variables aléatoires uniformes etindépendantes
Nous allons maintenant construire une suite de variables aléatoires réelles uniformes et indépen-dantes sans passer par le célèbre théorème de Kolmogorov. Ceci permet de démontrer l’existenced’une suite de variables aléatoires indépendantes de toutes sortes à l’aide du lemme suivant :

CHAPITRE 3. PROBABILITÉS 31
Lemme3.5.1.SoitF la fonction de répartition de la variable aléatoire réelleX etU une loi uniformesur [0; 1]. On pose pourt ∈ [0; 1]
F−1(t) = inf s ∈ IR;F (s) ≥ t .
AlorsF−1(U) a même loi queX.
Preuve :En effet, on a pour toutx ∈ IR
IP(F−1(U) ≤ x
) Déf= IP (U ≤ F (x))
= F (x)
D’où le résultat.
Exemple3.5.2. Pour la construction du jeu de pile ou face biaisé de paramètre p, c’est-à-dire unesuite de variable aléatoire de Bernouilli de paramètrep, on se donne une suite(Un)n de variablesaléatoires uniformes sur[0; 1] et on pose∀n ∈ IN,
Xn = F−1(Un)
où pour toutx ∈ [0; 1],
F−1(x) =
0 si x ≤ 1 − p1 si x > 1 − p
.
Il ne nous reste qu’à démontrer la
Proposition 3.5.3. Il existe une suite(Un)n de variables aléatoires uniformes sur[0; 1].
Preuve :Désignons parD l’ensemble de nombres2-adiques
D =
x ∈ [0; 1];∃n ∈ IN,∃(k0, . . . , kn) ∈ 0; 1n+1 , x =
n∑
i=0
ki2i
.
et considérons pour espace de probabilité le segment[0; 1] \D = Ω muni de la tribu borélienne et dela mesure de Lebesgueλ surΩ.D désigne l’ensemble de nombres2-adiques
D =
x ∈ [0; 1];∃n ∈ IN,∃(k0, . . . , kn) ∈ 0; 1n+1 , x =
n∑
i=0
ki2i
.
Toutx ∈ Ω admet un développement2-adique unique de la forme
x =∞∑
i=1
xi2i
avec∀i ≥ 1, xi ∈ 0; 1 .

CHAPITRE 3. PROBABILITÉS 32
Pour touti ≥ 1, on définit l’applicationεi surΩ et à valeurs dans0; 1 par
εi(x) = xi.
Nous allons montrer que la suiteεi est une suite de variables aléatoires indépendantes suivant toutesune loi de Bernouilli de paramètre1
2. Pour cela, on calcule pour toutn ∈ IN∗ la loi du vecteur
(ε1; . . . ; εn).Soit donc(a1, . . . , an) ∈ 0; 1n, on a
IP (ε1 = a1; . . . ; εn = an) = λ
([n∑
k=1
ak2k
;n∑
k=1
ak2k
+1
2n
[)
=1
2n(3.1)
On en déduit alors la loi deεi pour touti ≥ 1 :
IP (εi = ai) =∑
(a1,...,ai−1)∈0;1n−1
IP (ε1 = a1; . . . ; εi−1 = ai−1; εi = ai)
= 2i−1 × 1
2i
=1
2
doncεi suit une loi de Bernouilli de paramètre12. L’indépendance découle alors de (3.1). On dispose
ainsi d’une suite(εn)n de variables aléatoires indépendantes de paramètre12. CommeIN × IN est
dénombrable, on peut réindexer notre suite surIN × IN : (ε(n,k))(n,k)∈IN∗×IN∗.On pose alors pour toutn ≥ 1,
Un =∞∑
k=1
ε(n,k)
2k.
Il est facile de voir que la suite(Un)n ainsi définie est une suite de variables aléatoires indépendantes.Comme il est clair qu’il y a convergence presque sûre de la série, on a
IE[eitUn
]= lim
m→∞IE[eit
Pmk=1
ε(n,k)
2k
]
= limm→∞
q∏
k=1
(1 + eit/2
k
2
)
= limm→∞
q∏
k=1
eit/2k+1
cos(t/2k+1)
= limm→∞
eitPq
k=11
2k+1sin(t/2)
2q sin(t/2q+1)
→ 2eit/2sin(t/2)
t
et ceci assure queUn suit bien une loi uniforme sur[0; 1], ce qui termine la démonstration.
Bibliographie
[Z-Q] Ziuly & Queffélec.Eléments d’analyse pour l’agrégation
[Tau1] Tauvel.Analyse complexe. Exercices corrigés
[Rud] Rudin.Analyse réelle et complexe
[Cal] Calais.Théorie des groupes
[Tau2] Tauvel.Mathématiques générales pour l’agrégation
[Fra] Francinou-Gianella.Exercices de mathématiques pour l’agrégation. Algèbre1
33