Embed Size (px)
Citation preview

Publié par : Published by: Publicación de la:
Faculté des sciences de l’administration Université Laval Québec (Québec) Canada G1K 7P4 Tél. Ph. Tel. : (418) 656-3644 Télec. Fax : (418) 656-7047
Édition électronique : Electronic publishing: Edición electrónica:
Aline Guimont Vice-décanat - Recherche et affaires académiques Faculté des sciences de l’administration
Disponible sur Internet : Available on Internet Disponible por Internet :
http://www5.fsa.ulaval.ca/sgc/documentsdetravail [email protected]
DOCUMENT DE TRAVAIL 2008-008
INFÉRENCE DES COEFFICIENTS D’IMPORTANCE RELATIVE DES CRITÈRES DANS PROMETHEE II
Hela Moalla FRIKHA Habib CHABCHOUB Jean-Marc MARTEL
Version originale : Original manuscript: Version original:
ISBN – 978-2-89524-321-2
Série électronique mise à jour : On-line publication updated : Seria electrónica, puesta al dia
04-2008

1
Inférence des coefficients d’importance relative des
critères dans PROMETHEE II
Hela Moalla Frikha
1, Habib Chabchoub
2 et Jean-Marc Martel
3
1
LOGIQ, Institut Supérieur de Gestion Industrielle de Sfax, Route M’Harza
Km 1,5 ; B.P : 954, 3018 Sfax, Tunisie. 2
Faculté des Sciences Economiques et de Gestion de Sfax, Route de l’aérodrôme
Km 4, B.P : 1088, 3018 Sfax, Tunisie. 3
Faculté des Sciences de l’Administration, Université Laval, Cité Universitaire,
Québec (Qué.), G1K 7P4, Canada.
Résumé
La plupart des modèles d’aide multicritère à la décision comportent des paramètres permettant de
modéliser les préférences du décideur. Il va de soi que la détermination des valeurs de ces
paramètres devait se faire en collaboration avec le décideur ; c’est notamment le cas pour les
coefficients d’importance relative (c.i.r.) des critères. La détermination des c.i.r. constitue pour le
décideur une tâche importante, mais qui est généralement assez difficile à accomplir.
L’information qu’il peut fournir à ce niveau est inévitablement subjective et souvent partielle ; il
faut donc chercher à exploiter au mieux cette information. C’est précisément l’objet de cet
article, pour les c.i.r. des critères dans PROMETHEE. En prenant appui sur la programmation
mathématique, nous développons une approche de désagrégation des préférences permettant
d’inférer les c.i.r. des critères à partir d’information partielle fournie par le décideur. Le
programme construit comportera des solutions multiples, mais permettra de dégager des
intervalles de valeurs pour les c.i.r. Le critère de Hurwicz permettra d’expliciter une valeur pour
chacun des c.i.r.
Mots clés : Aide multicritère à la décision ; Approches de désagrégation des préférences ;
Programmation mathématique ; PPOMETHEE; Coefficients d’importance relative (c.i.r.) des
critères;
1 Introduction
Lors d’une activité d’aide multicritère à décision, la préoccupation de base concerne la
manière par laquelle la décision sera prise dans un contexte donné. Toutefois, il peut
également être pertinent de poser le problème inversement : en supposant qu’une décision a
été prise, est-il possible de trouver les bases rationnelles permettant d’expliquer, de justifier la
décision prise ? Ou encore est-il possible de dégager le modèle des préférences du décideur
permettant d'aboutir exactement à la même décision ou au moins à une décision très
"similaire" ? La philosophie d’une approche de désagrégation des préférences dans le cadre
d’une analyse multicritère est de dégager ou de déterminer des éléments de la modélisation
des préférences à partir de structures préférentielles fournies par le décideur, tout en tenant
compte de la problématique décisionnelle retenue. Comme on le verra dans la section

2
suivante, plusieurs approches ont été développées afin de déterminer certains paramètres des
méthodes ÉLECTRE, mais peu l’ont été pour les méthodes PROMETHEE.
Dans cet article, nous considérons le problème de la désagrégation des préférences dans
le cadre de la méthode PROMETHEE II. À partir de relations de préférence fournies par le
décideur, nous cherchons à déduire les valeurs des coefficients d’importance relative (c.i.r.)
des critères en ayant recours à la programmation mathématique.
L’organisation de l’article s’articule comme suit : une brève présentation des approches
de désagrégation constitue la section 2. La section 3 sera consacrée à une description des
méthodes PROMETHEE. Dans la section 4, nous développerons une approche basée sur une
programmation mathématique pour déterminer les valeurs des c.i.r. des critères. Un exemple
numérique illustratif fera l’objet de la section 5 et la section 6 contiendra une brève
conclusion.
2 Approches de désagrégation des préférences
Plusieurs approches de désagrégation ont été développées pour déduire les paramètres
de la méthode ÉLECTRE. En effet, un premier essai de détermination des paramètres de
ÉLECTRE III à partir d'un rangement donné a été présenté par Richard (1981) sans aboutir
réellement à des résultats satisfaisants. Puis Kiss et al. (1994) ont développé un système
interactif ÉLECCALC qui détermine indirectement les paramètres de la méthode ÉLECTRE
II à partir des réponses des décideurs à des questions concernant leurs préférences globales.
Dans le même contexte de méthodes de désagrégation des préférences permettant de
déterminer les valeurs de certains paramètres d’ÉLECTRE à partir d'informations fournies par
le décideur, Mousseau a contribué à l'élaboration de plusieurs travaux. En effet, Mousseau et
Slowinski (1998) ont proposé une approche d'inférence globale qui déduit les paramètres
d’ÉLECTRE TRI simultanément, en partant d'exemples d'affectation. Dans la continuité de
cette même idée, Mousseau et al. (2001) ont proposé une approche d'inférence partielle qui
consiste à déduire uniquement les coefficients d'importance relative des critères et le niveau
de coupe afin de déduire des relations triviales à partir de relations de surclassement valuées.
À leur tour, An Ngo et Mousseau (2002) ont présenté une procédure d'inférence qui détermine
les limites des catégories dans ÉLECTRE TRI à partir d'exemples d'affectation fournis par le
décideur. Enfin, Dias et Mousseau (2006) ont proposé un programme mathématique pour
déduire les valeurs du seuil de veto d’ÉLECTRE III à partir d'exemples de surclassement.
Mousseau et Dias (2004) ont aussi introduit le concept de non discordance aux procédures
d’inférence des paramètres d’ÉLECTRE III et ÉLECTRE TRI a fin de réduire les difficultés
de résolution des programmes mathématiques. Lorenço et Costa (2004) ont développé une

3
approche de désagrégation permettant d’inférer les coefficients d’importance relatives et les
limites des catégories d’ÉLECTRE TRI en se basant sur des exemples d’affectation fournis
par le décideur a fin de trier les solutions non dominées dans un programme linéaire en
nombres entiers multi objectif.
Dans le même contexte de désagrégation des préférences, Jacquet-Lagreze (1979) a proposé
une approche pour construire un modèle de valeur additive qui consiste à estimer
indirectement les paramètres du modèle sur la base d'informations holistiques sur les
préférences. Cette approche est mathématiquement intégrée dans la méthode UTA par
Jacquet-Lagrèze et Siskos (1982) à travers un modèle de désagrégation de type régression
ordinale, basé sur la formulation de la programmation linéaire. Les méthodes de
désagrégation des préférences apparaissent aussi dans d’autres versions de UTA. En effet, la
méthode UTADIS (UTilités Additives DIScriminantes) (Doumpos et Zopounidis, 2004) est
une méthode de régression ordinale basée sur l'approche de désagrégation des préférences.
Étant donnée une classification prédéfinie d'actions dans des classes, l'objectif de UTADIS est
d'estimer une fonction d'utilité additive et des seuils d'utilité qui affectent les actions dans
leurs classes originales avec un minimum d'erreurs de classification. La méthode UTA II,
développée par Siskos (1980) est une autre version de la méthode UTA. Cette approche de
désagrégation des préférences sert à estimer le modèle d'utilité additive. Dans le cadre de
l'aide multicritère à la décision face à l'incertitude, Siskos (1983) a développé une méthode de
régression ordinale à partir de UTA (UTA stochastique).
D’autres auteurs ont développé des approches de désagrégation des préférences
indépendamment des procédures d’agrégation multicritères. En effet, MUSA MUlticriteria
Satisfaction Analysis (Grigoroudis and Siskos, 2002) est une approche de désagrégation des
préférences permettant d’évaluer le degré de satisfaction des clients en se basant sur leurs
jugements et préférences. Cette approche agrège les différentes préférences en une fonction de
satisfaction unique minimisant les erreurs. Grigouridis et al (2008) a proposé une approche
multicritère de désagrégation des préférences mesurant la satisfaction des utilisateurs a fin
d’analyser leurs perceptions et préférences dans l’évaluation de la qualité des sites webs. Ce
modèle permet d’estimer l’importance relative et le niveau de la demande des différentes
dimensions de satisfaction des utilisateurs. En plus, Xu (2006) a proposé deux modèles de
désagrégation pour résoudre les problèmes de décision multicritère où l’information
concernant les poids des critères est incomplètement connue et les valeurs des critères sont
des variables linguistiques incertaines, et le décideur possède des préférences sur les
alternatives.

4
3 Les méthodes PROMETHEE
3.1 Principes des méthodes PROMETHEE
Les méthodes PROMETHEE “Preference Ranking Organization METHod for
Enrichment Evaluations” (Brans et Vincke, 1985) reposent sur le principe de comparaison
deux à deux des actions selon chaque critère: Elles consistent à définir une fonction-critère
Pkij permettant de modéliser les préférences du décideur selon chaque critère k. Lorsque le
décideur compare deux actions xi et xj, Pkij représente le degré de préférence pour xi, en ne
considérant que le critère k. La fonction de préférence est définie séparément pour chaque
critère par :
0 si 0
où ( ) ( )
si 0
k
ij
k k
ij ij k i k j
k k
ij ij
d
P d g x g x
P d
[1]
La fonction de préférence Pkij diffère selon la nature du critère (critère normal, quasi-critère,
pré-critère, pseudo-critère en escalier, pseudo-critère à préférence linéaire ou critère
Gaussien).
Chaque fonction-critère prend ses valeurs entre 0 et 1. Plus la valeur est proche de 0, plus la
préférence du décideur pour l’une des actions est faible. Plus elle tend vers 1, plus sa
préférence pour une action augmente. En cas de préférence stricte, la fonction devient égale à
1. Pour définir la fonction-critère de certains critères, il faut fixer deux seuils : un seuil
d’indifférence (q) et un seuil de préférence (p). La préférence globale d’une action xi sur une
action xj est donnée par l’indice de préférence Cij. Pour chaque action xi, on calcule les flux
sortants i+, les flux entrants i et les flux nets (ou bilans de flux) i, qui expriment
respectivement la « force », la « faiblesse » et la valeur relative de l’action xi.
Donc, il faut d’abord calculer:
L'indice de préférence de xi sur xj en considérant simultanément tous les critères.
1
nk
ij k ij
k
C w P [2]
où wk est la valeur du c.i.r. attribuée au critère k tel que : 0 et 1k k
k
w w , wk est
d'autant plus grand que le critère k est important.
Cij = 0 si et seulement si xi est indifférent à xj pour tous les critères.
Cij = 1 si et seulement si xi est strictement préférée à xj pour tous les critères.
On calcule ensuite pour chaque action xi:

5
Les flux sortants de xi, qui représentent la dominance de xi par rapport aux autres actions,
s’expriment par :1
r
i ij
ji j
C [3]
Les flux entrants vers xi, qui représentent la dominance des autres actions sur xi,
s'expriment par: 1
r
i ji
ji j
C [4]
Le flux net de xi, c'est à dire le bilan des flux entrants et sortants, s'exprime par :
i i i [5]
La méthode PROMETHEE II
La méthode PROMETHEE II conduit à un rangement des actions en un pré-ordre total
où on n'accepte pas l'incomparabilité: toutes les actions sont classées de la meilleure à la
moins bonne.
En effet, le flux net i peut être positif ou négatif. Plus il est grand, plus l'action xi domine
l'ensemble des autres, moins elle est dominée. Ainsi :
xi surclasse xj si et seulement si i j et
xi est indifférente à xj si et seulement si i j.
La méthode PROMETHEE II exige l'affectation d'un c.i.r. à chacun des critères. Ces c.i.r.
sont généralement fournis par le décideur. Or, il peut être assez difficile pour le décideur de
fournir des valeurs précises et objectives pour ces c.i.r. Pour exploiter au maximum
l’information partielle que le décideur est en mesure de fournir concernant ses préférences,
nous proposons dans la section suivante une approche pour la détermination des c.i.r. des
critères dans la méthode PROMETHEE II en utilisant la programmation mathématique.
4 Une approche pour la détermination des c.i.r. des critères de PROMETHEE II
4.1 Programme mathématique pour inférer les c.i.r.
Dans la plupart des problèmes d'aide multicritère à la décision, le décideur doit fournir à
l'homme d'étude l’information concernant les c.i.r. des critères. Avec les méthodes
PROMETHEE, le décideur n'échappe pas à cette obligation.
L’information même partielle, que le décideur pourra fournir peut être utile à l’homme
d’étude pour déterminer les c.i.r des critères. Dans ce papier, l’information partielle fournie
par le décideur sera incorporée dans un modèle de programmation mathématique permettant
de générer des valeurs pour les c.i.r. des critères de PROMETHEE. On suppose que cette
information partielle fournie par le décideur est de deux types: Dans le premier type, le

6
décideur est invité à fournir ses préférences sur quelques paires d’actions et l’on doit
évidemment faire en sorte que ces préférences soient respectées lors du rangement final des
actions. Le deuxième type concerne un pré-ordre soit partiel ou total sur l’importance relative
des critères, selon l’information que le décideur peut fournir.
Dans le cadre de la méthode PROMETHEE II, lorsqu’une action xi est préférée à une
action xj (xi xj), cela signifie que i j. Nous devons donc déterminer le flux net ( i) en
fonction des c.i.r. wk, et puisque i est le bilan des flux sortants et entrants, alors nous devons
calculer i et i en fonction des wk. En appliquant les formules [2], [3] et [4] qui expriment
respectivement, l'indice de préférence Cij, les flux sortants i et les flux entrants i, on a :
1 1 1
r r nk
i ij k ij
j j ki j i j
C w P [6]
1 1 1
r r nk
i ji k ji
j j ki j i j
C w P [7]
Le flux net est alors exprimé comme suit :
1 1 1 1
r n r nk k
i i i k ij k ji
j k j ki j i j
w P w P [8]
Nous considérons les préférences exprimées par le décideur comme étant des objectifs à
atteindre.
Dans le cadre de la méthode PROMETHEE II, « l'objectif » d'avoir xi préférée à xj
(xi xj) signifie que i est supérieur à j d'où 0i j . On peut transformer cette inégalité en
égalité, en introduisant deux variables d'écart, représentant les déviations entre les réalisations
obtenues et les préférences exprimées par le décideur (les objectifs). Notons par S+
m la
déviation positive en cas de dépassement de l'objectif et S m la déviation négative dans le cas
contraire.
Donc, pour toute paire d’actions (xi, xj), xi xj implique que :
0 avec 0 et 0i j m m m mS S S S
Si le but est atteint (xi xj) alors i j. On peut transformer cette inégalité en
égalité, en retranchant une déviation positive mS d'où :
0i j mS avec 0mS .
Si le but n'est pas atteint
- Si (xj xi) alors i j. Dans ce cas, on doit ajouter une déviation
négative mS d'où : 0i j mS avec 0mS .
- Si (xi ≈ xj) alors i j d'où 0i j.

7
Ces équations constituent les contraintes modélisant l'information partielle concernant les
préférences du décideur dans le programme mathématique qui permettra la détermination des
c.i.r. des critères.
Si l'objectif du décideur est d'avoir xi xj alors nous devons minimiser toutes les déviations
négatives mS et l'idéal est que toutes les mS soient égales à zéro. Donc, pour respecter les
préférences du décideur, la fonction objectif du programme mathématique sera la
minimisation de toutes les déviations négatives. Par exemple, si le décideur propose p
préférences alors nous devons minimiser la fonction somme : 1
p
m
m
S .
Puisque la fonction objectif est de minimiser la somme des déviations négatives, alors il existe
un risque qu’à l’optimalité toutes les déviations positives et négatives soient nulles. Dans ce
cas 0 i j m mS S devient i j = 0 et le décideur sera indifférent entre les deux
actions, ce qui contre dit les relations de préférences fournies.
Or, (xi xj) signifie que i j 0. Nous devons avoir donc au moins une légère différence
entre i et j
Pour avoir i j, et pour respecter l’équation 0 i j m mS S avec mS prend sa valeur
minimale (de préférence 0mS ), nous devons avoir 0mS .
Pour cela, nous introduisons dans le programme linéaire des contraintes du type
1, ,m mS m p fixant un seuil minimum positif m à chaque déviation positive S m
afin de l’empêcher d’être nulle. Maintenant, la question qui se pose est comment choisir les
seuils ? Nous commençons par fixer un seuil arbitraire m à chaque S m et nous résolvons le
programme mathématique. À ce stade, nous nous intéressons uniquement aux valeurs
trouvées des déviations S m.
Si les valeurs des déviations positives trouvées sont largement supérieures aux valeurs des
seuils fixés dans une ou plusieurs contraintes, c'est-à-dire m mS , alors les seuils sont bien
fixés. Cependant, si la valeur de la déviation trouvée est égale à la valeur du seuil fixé dans
une ou plusieurs contraintes, c’est à dire m mS , alors il existe un risque que Sm aurait une
autre valeur inférieure à m, mais elle n’a pas pu à cause de la contrainte m mS . Elle a donc
pris le minimum, qui est égal à m. Dans ce cas, on diminue le seuil m et nous résolvons de
nouveau le programme linéaire. Nous vérifions si les valeurs des déviations positives trouvées
sont largement supérieures aux seuils, et ainsi de suite. La diminution des seuils se fait jusqu’à
ce qu’ils soient très petits, négligeables, et tendent vers 0. Dans ce cas, la préférence de xi sur
xj est très faible, tend vers l’indifférence et nous ne pouvons plus réduire la valeur de m.
En plus de ces contraintes, deux autres types de contraintes figurent dans le programme. Le
premier correspond à la normalisation des c.i.r. C’est à dire que la somme des c.i.r doit être
égale à 1. Par exemple, si nous avons n critères alors : 1
1n
k
k
w

8
En outre, il faut tenir compte du fait que les c.i.r des critères soient strictement positifs (wk 0).
Nous devons éviter le fait qu’un critère ait un coefficient d’importance relative nul, sinon, il
sera inutile de le prendre en considération dans la liste des critères du problème en question.
Vu que la programmation linéaire ne traite pas les contraintes du type strictement positif, nous
fixons un seuil minimum k pour chaque c.i.r. Au dessous de ce seuil, le critère ne sera plus
significatif. Par conséquent, nous ajoutons au programme mathématique la contrainte :
1, , k kw k n .
Le deuxième type d'information partielle fournie par le décideur concerne le pré-ordre partiel
ou total sur l’importance relative des critères. En effet, s’il s’agit de pré-ordre total, le
décideur est invité à classer les différents critères par ordre d'importance sans connaître les
valeurs précises des c.i.r. Pour n critères nous pouvons écrire ( 1)n contraintes exprimant le
pré-ordre total des c.i.r. Cependant, s’il s’agit d’un pré-ordre partiel, le décideur est sollicité à
présenter quelques comparaisons entre des paires de c.i.r. de certains critères. Le nombre de
contraintes correspondant au pré-ordre partiel ne doit pas dépasser ( 1)n . Ainsi, le
programme mathématique s'écrit:
Programme 1 :
1
1
1
0 1, ,
Contraintes de type , 1, , et 1, ,
p
m
m
n
k
k
i j m m
h l
Minimiser Z S
Sous Contraintes
w
S S m p
w w h l k n l n
1, ,
1, ,
0 et 0
1, ,
m m
k k
m m
S m p
w k n
S S m p
L'équation [8] nous permet de réécrire ce programme comme suit :

9
Programme 2 :
1
1
1 1 1 1
1
0
p
m
m
n
k
k
n n n nk k k k
k ij k ji k ij k ji m m
j i k j i k i j k i j k
Minimiser Z S
Sous Contraintes
w
w P w P w P w P S S
1, ,
Contraintes de type , 1, , et 1, ,
1, ,
h l
m m
m p
w w h l h n l n
S m p
1, ,
0 et 0 1, ,
k k
m m
w k n
S S m p
Il est à noter que pour différents jeux de c.i.r., nous pouvons avoir le même rangement des
actions. Donc le programme mathématique proposé ci-dessus admet des solutions multiples.
4.2 Résolution du problème des solutions multiples
Dans ce travail, afin de surmonter le problème des solutions multiples, nous proposons
une technique permettant de réduire le nombre de solutions ainsi que leur dispersion et
d'assurer une certaine convergence. Cette technique repose sur la détermination de la valeur
maximale et la valeur minimale que peut prendre chaque c.i.r. (les solutions extrêmes de
chaque c.i.r.) tout en respectant les contraintes du programme mathématique. En effet, pour
trouver la valeur minimale de chaque wk, nous devons minimiser simultanément la somme
des déviations négatives et la valeur de wk. Ainsi, la fonction objectif du Programme linéaire
devient : 1
p
m k
m
Minimiser Z S w .
Par contre, pour déterminer la valeur maximale de wk, nous devons minimiser la somme des
déviations négatives et maximiser le c.i.r. wk en même temps. Par conséquent, la fonction
objectif s’écrit ainsi : 1
p
m k
m
Minimiser Z S w .
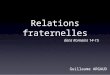
Lorsque le décideur nous fournit un pré-ordre total pour les valeurs des c.i.r., nous pouvons
représenter ces intervalles sur un même graphique (voir figure 1) tout en tenant compte du
pré-ordre (croissant) des c.i.r. proposés.

10
Figure 1 : Représentation des intervalles de variations des wk
À partir de cette représentation (figure 1) nous remarquons l'existence de plages d'intersection
entre les intervalles où l'information partielle concernant le pré-ordre total des c.i.r. ne peut
pas être respectée. Par conséquent, les contraintes de pré-ordre des wk peuvent être violées.
Pour éviter ce problème nous devons éliminer une des deux parties hachurées. Cette opération
peut être qualifiée de réalisation de coupes sur les intervalles des valeurs des c.i.r. Cependant,
lorsque le décideur nous fournit un pré-ordre partiel pour les valeurs des c.i.r., nous devons
éliminer l’une des intersections entre chaque deux c.i.r. comparés. En fait, nous effectuons des
coupes uniquement sur les intervalles de variations des c.i.r. figurant dans l’information
fournie. Les coupes effectuées vont permettre de respecter l'information partielle concernant
le pré-ordre des c.i.r., de réduire considérablement le nombre de solutions et d'assurer la
convergence vers une solution unique ou bien vers des intervalles de variation des wk de
largeurs réduites.
Ces coupes sont introduites dans le programme 2, sous forme de contraintes de type ou bien
l'un ou bien l'autre. Le fait d'éliminer l'intervalle [al, bh] soit de [al, bl] soit de [ah, bh] se
traduit par wh al ou wl bh.
Pour transformer une contrainte de la forme :
f(x1, x2, …,xn) 0 ou g(x1, x2, …,xn) 0,
il suffit d'utiliser la règle suivante :
1 2 n
1 2 n
1 2 n 1 2 n
1 2 n
f(x ,x , ..., x ) My
g(x ,x , ..., x ) M(1 - y)f(x ,x , ..., x ) 0 ou g(x ,x , ..., x ) 0
y {0,1}
M Sup(f,g) x , x , ..., x domaine des solutions réalisables
≤
≤≤ ≤ ⇔
∈
≥ ∀ ∈
avec y est une variable binaire et M est un nombre très grand vérifiant f M et g M.
1 0
wl
bh
wh
ah al bl
wh wl wv
wv
wj

11
Cette règle garantie que l'une au moins des deux contraintes soit vérifiée.
Explication :
ère
ère
1
1
1
1
(La 1 contrainte est retenue et la suivante est rejetée)
(La 1 contrainte est r
( ,..., ) 0- Si 0
( ,..., ) (évidente)
( ,..., ) (évidente)- Si 1
( ,..., ) 0
n
n
n
n
f x xy
g x x M
f x x My
g x xejetée et la suivante est retenue)
Soit ys une variable binaire, si ys= 0, nous éliminons la plage d’intersection de l’intervalle du
c.i.r le moins important c'est-à-dire nous éliminons l’intervalle [al, bh] de [ah, bh]. Cependant,
si ys= 1, nous éliminons la plage d’intersection de l’intervalle du c.i.r suivant c'est-à-dire nous
éliminons l’intervalle [al, bh] de [al, bl].
Le nombre de variables binaires ys peut être au maximum ( 1)
2
n n puisque le nombre de
comparaisons de chaque c.i.r wk par rapport aux wk suivants est de [(n 1) + (n 2) + … + 1].
La contrainte : wh al ou wl bh s'écrit wh al 0 ou bh wl 0.
En appliquant la règle précédente, cette contrainte devient :
( 1)(1 ) 1, ,
2{0,1}, sup( , )
h l s
h l s
s h l h l
w a Myn n
b w M y s
y M w a b w
avec ys est une variable binaire et M est un nombre très grand vérifiant :
wh al M et bh wl M.
Puisque wh wl , bh al sont inférieurs ou égaux à 1, nous pouvons choisir M=1.
Par conséquent, notre contrainte s'écrit comme suit :
( 1)1 1, ,
2{0,1}
h l s
h l s
s
w a yn n
b w y s
y
Un troisième programme mathématique qui tient compte des préférences du décideur
sur quelques paires d’actions, de son pré-ordre partiel ou total concernant les valeurs des c.i.r
ainsi que des coupes suggérées, peut alors être formulé ainsi :

12
Programme 3 :
1
1
1
0 1, ,
contraintes de type , 1, , et 1, ,
p
m
m
n
k
k
i j m m
h l
Minimiser Z S
Sous Contraintes
w
S S m p
w w h l h n l n
( 1) 1 1, ,
2{0,1}
1, ,
1, ,
0 et 0
h l s
h l s
s
m m
k k
m m
w a yn n
b w y s
y
S m p
w k n
S S
1, ,m p
La résolution de ce programme mathématique génère des solutions multiples au niveau des
variables binaires ys (différentes possibilités d’élimination de plages d’intersection entre les
intervalles des c.i.r.). En effet, il existe une multitude de combinaisons possibles des ys
donnant plusieurs solutions réalisables des c.i.r. (chaque combinaison engendre des solutions
multiples au niveau des c.i.r. wk). Pour chacune de ces combinaisons, nous déterminons les
solutions extrêmes des wk, et nous en déduisons les intervalles de valeurs des c.i.r. Ces
intervalles ne présentent aucun risque de violation des contraintes de pré-ordre des wk.
Pour trouver les valeurs précises des c.i.r pour chaque combinaison f des ys, nous proposons
d'utiliser le critère de Hurwicz ( ). Nous considérons f comme étant un nombre compris
entre 0 et 1. f peut être considéré comme la probabilité que l'ambiguïté sera résolue aussi
favorablement que possible; alors que 1 f est la probabilité que l'ambiguïté sera résolue
aussi défavorablement que possible.
Soit wkf
[akf, bk
f], alors bk
f = Max(wk
f) et ak
f = Min(wk
f)
D'après ce critère, la valeur de wkf s'écrit : wk
f= f Max(wk
f) + (1 f) Min(wk
f).
Puisque la somme des c.i.r est égale à 1, nous pouvons déduire la valeur de f pour chaque
combinaison f et par la suite les valeurs précises wkf pour les c.i.r. des critères. Pour chaque
combinaison f, nous sommes intéressés à la valeur de w1. Alors nous retenons la valeur w1 et
la fixons dans le programme mathématique, c-à-d que nous additionnons une contrainte
imposant que w1 soit égal à la valeur obtenue et nous résolvons le programme afin de trouver
les solutions extrêmes wk pour k = 2,…, n. Nous déduisons alors les valeurs maximums et
minimums des wk . Nous appliquons le critère de Hurwick pour trouver les c.i.r. Ensuite, nous
fixons w2 dans le programme mathématique et nous déterminons les intervalles de variations

13
des wk pour k = 3,…, n et ainsi de suite jusqu’à ce que nous obtenions les valeurs w1, …, wn.
Ces valeurs respectent toutes les contraintes du programme mathématique.
Pour chaque critère, le nombre de valeurs possibles wkf pour les c.i.r. est égal au nombre de
combinaisons des ys. Afin d’obtenir une valeur unique de coefficient d’importance relative
associé à chaque critère k, nous faisons la moyenne de tous les wkf après avoir éliminé les
solutions identiques.
5 Exemple illustratif: sélection de personnel (Pomerol et Barba-Romero, 1993)
Pour embaucher un nouveau salarié, une entreprise a retenu six candidats. Ces actions
Ai, i = 1, 2, …, 6 sont appelées A, B, D, E, G, H. Le service de recrutement décide de
considérer cinq critères : Les trois premiers critères sont quantitatifs.
Critère 1 : Nombre d'années d'études supérieures
Critère 2 : Nombre d'années d'expérience professionnelle
Critère 3 : Âge
Pour les critères 4 et 5, le responsable du recrutement a décidé de les exprimer par des notes
entre 0 et 10.
Critère 4 : Appréciation résultant de l'entretien
Critère 5 : Résultat des tests psychotechniques
Le critère (3) : âge est considéré comme un critère avec préférence linéaire (un pré-critère)
ayant un seuil p= 5, les autres critères restent des vrai-critères.
Les différents critères et actions ainsi que les évaluations des performances des candidats sont
présentés dans la table 1.

14
Table 1 : Matrice de décision
Actions Critères
1
Max
2
Max
3
Min
4
Max
5
Max
A
B
D
E
G
H
6
4
5
6
6
5
5
2
7
1
8
6
28
25
35
27
30
26
5
10
9
6
7
4
5
9
6
7
9
8
c.i.r. ? ? ? ? ?
Le décideur peut fournir l’information partielle présentée comme suit :
- GD ; EA ; BH ; EH ; BD ; DA.
- w3 w4 w5 w2 w1
Sur la base de cette information partielle nous appliquons l'algorithme présenté
précédemment pour déterminer les valeurs des c.i.r. des critères.
Nous procédons par une transformation de l'information partielle sous forme de contraintes en
fonction des wk afin d'obtenir le programme mathématique suivant:
Programme 4: 6
1
1 2 3 4 5
1 2 3 4 5 1 1
2 3 4 5
+ = 1
5 2 3.2 2 7 0
4 2 4
m
m
Minimiser Z S
Sous Contraintes
w w w w w
w w w w w S S
w w w w S2 2
1 2 3 4 5 3 3
1 2 3 4 5 4 4
1 2 3 4 5 5 5
1 2 3 4 5 6
0
3 4 10 3 0
5 6 4 2 0
3 6 8.2 2 7 0
5 2 2 2 6
S
w w w w w S S
w w w w w S S
w w w w w S S
w w w w w S 6
3 4
4 5
2
0
0
0
S
w w
w w
w 5
1 2
0
0
0,0001 1, ,6
0,01
m
k
w
w w
S m
w
1, ,5
0 et 0 1, ,6m m
k
S S m

15
La résolution de ce programme mathématique par le logiciel LINDO confirme l'existence de
solutions multiples respectant les contraintes puisqu'il y a des variables hors base ayant des
coûts réduits ou des prix duaux égaux à zéro. Nous cherchons les solutions extrêmes
minimisant et maximisant les valeurs des c.i.r. (table 2).
Il est à noter que la valeur de la fonction objectif est égale à zéro. Ceci montre que toutes les
déviations négatives (Sm ) sont nulles (ce qu'on désire avoir afin de respecter toutes les
préférences proposées par le décideur).
Table 2 : Les intervalles de variation des wk
c.i.r w1 w2 w3 w4 w5
Minimum 0.200016 0.178575 0.010000 0.107020 0.150389
Maximum 0.348480 0.269627 0.199996 0.247500 0.261646
À partir de ces valeurs, nous pouvons déduire les intervalles de variations des c.i.r des
critères: w1 [0.200016 , 0.348478] ; w2 [0.178575 , 0.269627] ; w3 [0.010000 , 0.199996] ;
w4 [0.107020 , 0.247500] ; w5 [0.150389 , 0.261646] .
Ensuite, nous représentons ces intervalles dans un même graphique (voir figure 2). Dans cette
représentation nous suivons le classement ordinal total croissant proposé par le décideur.
Figure 2 : Représentation des intervalles de variation des c.i.r.
wj
w1
w2
w5
w4
w3
0 0.02 0.200.126 0.158 0.231 0.261 0.348
wk
0.010 0.107 0.150 0.178 0.199 0.247 0.261 0.348

16
Cette représentation nous permet de visualiser des plages de violation des contraintes
concernant le pré-ordre total pour les valeurs des c.i.r. Ces plages, données par les
intersections entre les intervalles des wk (Iwk) doivent être éliminées. Par exemple, dans la
plage [0.107020, 0.199996], w3 peut prendre la valeur 0.18 et w4 peut prendre la valeur 0.14,
ce qui viole la contrainte w3 w4. Nous devons donc éliminer cette plage, soit de l'intervalle
de w3 ([0.010000, 0.199996]), soit de celui de w4 ([0.107020, 0.247500]).
Afin de modéliser ces éliminations, nous utilisons des contraintes binaires de type "ou bien
l'une ou bien l'autre". Ainsi, w3 0. 107020 ou w4 0.199996 se traduit par :
3 1 3 1
4 1 1 4
1 3 4 1
0.107020 0.107020
0.199996 (1 ) 0.800004
{0,1}, sup( 0.107020,0.199996 ) 1 {0,1}
w My w y
w M y y w
y M w w y
Nous procédons de la même manière pour les autres plages d'intersection (entre Iw4 et Iw5 ;
Iw4 et Iw2 ; Iw4 et Iw1 ; Iw3 et Iw5 ; Iw3 et Iw2 ; Iw5 et Iw2 ; Iw5 et Iw1 ; Iw2 et Iw1). Nous
obtenons le programme mathématique suivant :

17
Programme 5: 6
1
1 2 3 4 5
1 2 3 4 5 1 1
2 3 4 5 2 2
+ 1
5 2 3.2 2 7 0
4 2 4
m
m
Minimiser Z S
Sous Contraintes
w w w w w
w w w w w S S
w w w w S S
1 2 3 4 5 3 3
1 2 3 4 5 4 4
1 2 3 4 5 5 5
1 2 3 4 5 6 6
0
3 4 10 3 0
5 6 4 2 0
3 6 8.2 2 7 0
5 2 2 2 6
w w w w w S S
w w w w w S S
w w w w w S S
w w w w w S S
3 4
4 5
2
0
0
0
w w
w w
w 5
1 2
3 1
1 4
3
0
0
0.107020
0.800004
w
w w
w y
y w
w 2
2 5
4 3
3 5
3 4
4 2
4 5
0.150389
0.800004
0.150389
0.752500
0.178575
0.800004
0.1785
y
y w
w y
y w
w y
y w
w y
5 2
5 6
6 2
4 7
7 1
5 8
75
0.752500
0.178575
0.738354
0.200016
0.752500
0.200016
y w
w y
y w
w y
y w
w y
8 1
2 9
9 1
0.738354
0.200016
0.730373
0,0001 1, ,6
0,01 1, ,5
0 et
m
k
m
y w
w y
y w
S m
w k
S
0 1, ,6
0,1 1, ,9
m
s
S m
y s

18
La résolution du programme 5 génère des solutions multiples au niveau des valeurs des
variables binaires ys c'est-à-dire différentes possibilités d’éliminations des intersections entre
les intervalles des c.i.r. (différentes combinaisons f des ys) (Table 3).
Table 3 : Les solutions multiples des variables binaires
Solutions y1 y2 Y3 y4 y5 y6 y7 y8 y9
1 0 0 0 0 0 1 0 0 1
2 0 1 0 0 0 1 0 0 1
3 0 1 0 1 0 1 0 0 1
4 0 0 1 0 1 1 0 1 1
5 0 0 0 1 0 1 0 0 1
6 0 0 0 1 1 1 0 1 1
7 0 0 0 0 1 1 0 1 1
8 0 0 0 0 0 1 1 0 1
9 0 0 0 0 0 1 0 1 1
10 0 0 0 0 1 1 0 0 1
11 0 0 0 0 1 1 1 0 1
12 0 1 1 0 1 1 1 1 1
13 0 1 1 0 1 1 0 1 1
14 0 0 1 1 1 1 0 1 1
15 0 0 1 1 1 1 1 1 1
16 0 1 1 1 1 1 1 1 1
17 0 1 0 1 1 1 1 1 1
18 0 1 0 0 1 1 1 1 1
19 0 1 0 0 0 1 1 1 1
20 0 0 1 0 1 1 1 1 1
En effet, chaque combinaison f possible des ys donne plusieurs solutions réalisables pour les
valeurs des c.i.r : chaque combinaison engendre des solutions multiples au niveau des wk.
Pour chacune de ces combinaisons, nous déterminons les solutions extrêmes des wk, et nous
en déduisons les intervalles de valeurs des c.i.r. Ces intervalles ne présentent aucun risque de
violation des contraintes de pré-ordre total des wk.
Pour trouver les valeurs précises des c.i.r pour chaque combinaison f (f=1…20) des ys
(s=1…9), nous proposons d'utiliser le critère de Hurwicz pour les intervalles des c.i.r.
obtenus.
Puisque la somme des c.i.r. est égale à 1, nous déduisons la valeur de f pour chaque
combinaison f et par la suite les valeurs précises des c.i.r wkf des critères pour chaque
combinaison (Table 4). Pour chaque critère, le nombre de valeurs possibles de c.i.r est égal au
nombre de combinaisons des ys (20 valeurs possibles).

19
Table 4 Valeurs des c.i.r. pour chaque combinaison
w1 w2 w3 w4 w5
1 0,299950472 0,262512552 0,103965043 0,141793466 0,191778466
2 0,297460875 0,261981176 0,094786700 0,145765124 0,200006124
3 0,297460875 0,261983830 0,094794538 0,145759452 0,200001305
4 0,270181518 0,261703433 0,033280839 0,187117930 0,247716280
5 0,299950472 0,262512687 0,103965486 0,141793211 0,191778143
6 0,299578981 0,262546011 0,103734224 0,142340715 0,191800068
7 0,299578981 0,262546011 0,103734224 0,142340715 0,191800068
8 0,299950472 0,262512687 0,103965486 0,141793211 0,191778143
9 0,299578981 0,262546011 0,103734224 0,142340715 0,191800068
10 0,299950472 0,262512804 0,102647632 0,141744781 0,193144310
11 0,296599552 0,262106199 0,095853174 0,147194342 0,198246733
12 0,270181518 0,261698342 0,033263542 0,187122209 0,247734389
13 0,270181518 0,261698342 0,033263542 0,187122209 0,247734389
14 0,270181518 0,261698342 0,033263542 0,187122209 0,247734389
15 0,270181518 0,261698342 0,033263542 0,187122209 0,247734389
16 0,270181518 0,261698342 0,033263542 0,187122209 0,247734389
17 0,297228650 0,262006481 0,092967005 0,146188807 0,201609056
18 0,297228650 0,262006481 0,092967005 0,146188807 0,201609056
19 0,297228650 0,262006481 0,092967005 0,146188807 0,201609056
20 0,270181518 0,261698342 0,033263542 0,187122209 0,247734389
Afin d’obtenir une valeur unique pour le coefficient d’importance relative associé à chaque
critère k, nous faisons la moyenne des wkf de toutes les solutions (combinaisons) après avoir
éliminé les solutions identiques.
Table 5 Valeurs des c.i.r des critères
w1 w2 w3 w4 w5
1 0,299950472 0,262512552 0,103965043 0,141793466 0,191778466
2 0,297460875 0,261981176 0,0947867 0,145765124 0,200006124
3 0,297460875 0,26198383 0,094794538 0,145759452 0,200001305
4 0,270181518 0,261703433 0,033280839 0,18711793 0,24771628
5 0,299950472 0,262512687 0,103965486 0,141793211 0,191778143
6 0,299578981 0,262546011 0,103734224 0,142340715 0,191800068
7 0,299950472 0,262512804 0,102647632 0,141744781 0,19314431
8 0,296599552 0,262106199 0,095853174 0,147194342 0,198246733
9 0,261698342 0,033263542 0,187122209 0,247734389 0,261698342
10 0,29722865 0,262006481 0,092967005 0,146188807 0,201609056
wk 0,29285434 0,26215635 0,08592582 0,15268200 0,20638149

20
Après arrondissement des valeurs moyennes obtenues pour les c.i.r, les résultats pour les wk
normalisés sont:
w1 = 0.293; w2 = 0.262; w3 = 0.086; w4 = 0.153; w5 = 0.206
6 Conclusion
Cette méthode de détermination des c.i.r. des critères présente l'avantage de composer avec
l’inévitable subjectivité entourant l’intervention directe du décideur dans le processus de
décision. De plus, elle offre la possibilité de partir d'une information partielle concernant les
préférences du décideur pour aboutir à un rangement total des actions, et cela dans le cadre de
PROMETHEE II. Plus on dispose d’information provenant du décideur, plus il y a de
contraintes dans notre programme mathématique et plus les intervalles de valeurs pour les
c.i.r. sont étroits. Ces intervalles de valeurs peuvent être utiles pour conduire une analyse de
sensibilité et même de robustesse.
En outre, la puissance de la méthode présentée est telle qu'elle peut être appliquée à des
problèmes de grande taille. En effet, nous avons constaté que la taille du modèle ne dépend
pas du nombre d'actions, mais dépend uniquement du nombre de critères. Or, dans les
problèmes d'aide multicritère à la décision, le nombre de critères est généralement limité alors
que le nombre d'actions peut être assez grand. Nous concluons alors que l'application de notre
méthode de détermination des c.i.r. est applicable pour un très grand nombre de problèmes.
Nous pouvons traiter la méthode PROMETHEE I de la même façon, mais la modélisation
sera plus complexe. En effet, pour chaque comparaison d’une paire d’actions (xi,xj), xi
Surclasse xj ne sera plus modélisée sous la forme d’une seule contrainte, mais de plusieurs
contraintes de type « ou bien l’une ou bien l’autre ».
REFERENCES
An Ngo, Th. et Mousseau, V. (2002) “Using assignment examples to infer category limits for
the ELECTRE TRI method”, Journal of Multi-criteria decision analysis, vol. 11, pp. 29-43.
Brans, J.P. et Vincke, Ph. (1985) “A preference ranking organization method: the
PROMETHEE method”, Management Science, vol. 31, pp. 647-656.
Dias, L.C. et Mousseau, V. (2006) “Inferring ELECTRE's veto related parameters from
outranking examples”, European Journal of Operational Research, vol. 170, pp. 172-191.
Doumpos, M. et Zopounidis, C. (2004) “Developing sorting models using preference
disaggregation analysis: An experimental investigation”, European Journal of Operational
Research, vol. 154, pp. 585-598.

21
Grigoroudis, E. et Siskos, Y. (2002) “Preference disaggregation for measuring and analyzing
customer satisfaction: The MUSA method”, European Journal of Operational Research, vol.
143, pp. 148-170.
Grigoroudis, E., Litos, C., Moustakis, V.A., Politis, Y. et Tsironis, L. (2008) “The assessment
of user-perceived web quality: Application of a satisfaction benchmarking approach”,
European Journal of Operational Research, vol. 187, pp. 1346-1357.
Jacquet-Lagreze, E. (1979) “De la logique d'agrégation des critères à une logique
d'agrégation-désagrégation de préférences et de jugements”, Cahiers de l'ISMEA - série
Sciences de Gestion, vol. 13, pp. 839-859.
Jacquet-Lagrèze, E. et Siskos, Y. (1982) “Assessing a set of additive utility functions for
multicriteria decision making: the UTA method”, European Journal of Operational Research,
vol. 10, pp.151-164.
Kiss, L.N., Martel, J.M. et Nadeau, R. (1994) “An interactive software for modeling the
decision maker's preferences”, Decision Support Systems, vol. 12, pp. 311-326.
Lorenço, R.P. et Costa, J.P. (2004) “Using ELECTRE TRI outranking method to sort
MOMILP nondominated solutions”, European Journal of Operational Research, vol. 153, pp.
271-289.
Mousseau, V. et Slowinski, R. (1998) “Inferring an ELECTRE TRI model from assignment
examples”, Journal of Global Optimization, vol. 12, pp. 157-174.
Mousseau, V., Figueira, J. et Naux, J.P. (2001) “Using assignment examples to infer weights
for ELECTRE TRI method: Some experimental results”, European Journal of Operational
Research, vol. 130, pp. 263-275.
Mousseau, V. et Dias, L. (2004) “Valued outranking relations in ELECTRE providing
manageable disaggregation procedures”, European Journal of Operational Research, vol.
156, pp. 467-482.
Pomerol, J.Ch. et Barba-Romero, S. (1993) Choix multicritère dans l'entreprise. Ed.
HERMES.
Richard, J.L. (1881) “Procédure multicritère d'aide à la décision en matière d'audit de
stratégie: Cas des moyennes et petites industries”. Thèse de 3ème
cycle, Université de Paris
Dauphine, Paris.
Siskos, J. (1980) “Comment modéliser les préférences au moyen de fonctions d'utilité
additives”, RAIRO Recherche Opérationnelle, vol. 14, pp. 53-82.
Siskos, J. (1983) “Analyse de systèmes de décision multicritère en univers aléatoire”,
Foundations of Control Engineering, vol. 8, pp. 193-212.
Xu, Z. (2006) “Minimizing deviations models for solving MADM problems with preference
information on alternatives in uncertain linguistic setting”, International Journal of
Operational Research, vol. 3, No.1, pp. 30-35.







![Comment la science alimente les croyances.romy.sauvayre.online.fr/Files/Other/Articles/Sauvayre...[Chapitre 4] Comment la science alimente les croyances. La surprenante dialectique](https://img.pdfslide.fr/doc/110x75/601419ffcb48fe1f69775c30/comment-la-science-alimente-les-chapitre-4-comment-la-science-alimente-les.jpg)