Embed Size (px)
Citation preview
Concours RoBAFIS 2017 DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
DOSSIER DE DEVELOPPEMENT
PRELIMINAIRE
Réalisé par :
Hamza MEDARI Abdallah SAID
Imad MORCOS Dongyang ZHOU
Michel NASSIF Trong-Nghia NGUYEN
Encadré par :
Eynard BENOIT
Julia GUERINEAU
Thomas BARIZIEN
Année Universitaire : 2017/2018
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
2
Année Universitaire 2017 / 2018
Table des matières :
Table des matières : 2
1. Définition des exigences (LOT 10) : 3
1.1. Ébauche de description générale du système (Lot P11): 3
1.1.1. Finalité, mission et objectifs du système: 3
1.1.2. Contexte organique: 3
1.1.3. Contexte fonctionnel : 4
1.2. Ébauche de référentiel des exigences techniques du système (LOT P12): 4
1.2.1. Exigences fonctionnelles : 4
1.2.2. Exigences de performance : 5
1.2.5. Contraintes: 7
1.2.6. Paramètres de validation: 7
2. DOSSIER DE CONCEPTION ARCHITECTURALE DU SYSTEME (LOT 20) : 8
2.1. DESCRIPTION GENERALE (LOT 21) : 8
2.1.1. Sous-système de déplacement: 8
2.1.2. Sous-système de châssis : 10
2.2. ARCHITECTURE FONCTIONNELLE ET COMPORTEMENTALE : 13
2.2.1. Arborescence fonctionnelle statique : 13
2.2.2. Architecture fonctionnelle et dynamique: 14
2.3. EBAUCHE D’ARCHITECTURE ORGANIQUE/PHYSIQUE DU SYSTEME (LOT 23) : 15
2.3.1. Arborescence organique/physique : 15
2.3.2. Architecture organique/physique : 15
4.1. Sous-système de déplacement: 18
4.2. Sous-système du châssis : 19
4.3. Sous-système de commande : 19
4.4. Sous-système d’alimentation : 20
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
3
Année Universitaire 2017 / 2018
1. Définition des exigences (LOT 10) :
1.1. Ébauche de description générale du système (Lot P11):
1.1.1. Finalité, mission et objectifs du système:
Pour bien discerner les attentes du concours, nous avons décidé de bien déterminer le
système à exécuter, conforme au cahier des charges. Notre équipe de développement a
pu fixer des objectifs quantifiés relatifs aux grandes fonctionnalités du système qui
composent la mission.
Ces objectifs seront ensuite traduits en exigences de performance que nous imposons au
système.
Le SPORT’GT doit :
● Être conforme au cahier des charges.
● Fonctionner dans les conditions définies.
● Être capable de réaliser les 3 courses successives « en première place ».
● Respecter les durées réservées pour chaque phase.
● Respecter les trajectoires de déplacement dans le sens horaire.
● Parcourir la plus grande distance possible.
● Éviter les accidents avec l’autre véhicule.
● Assurer une commande fiable.
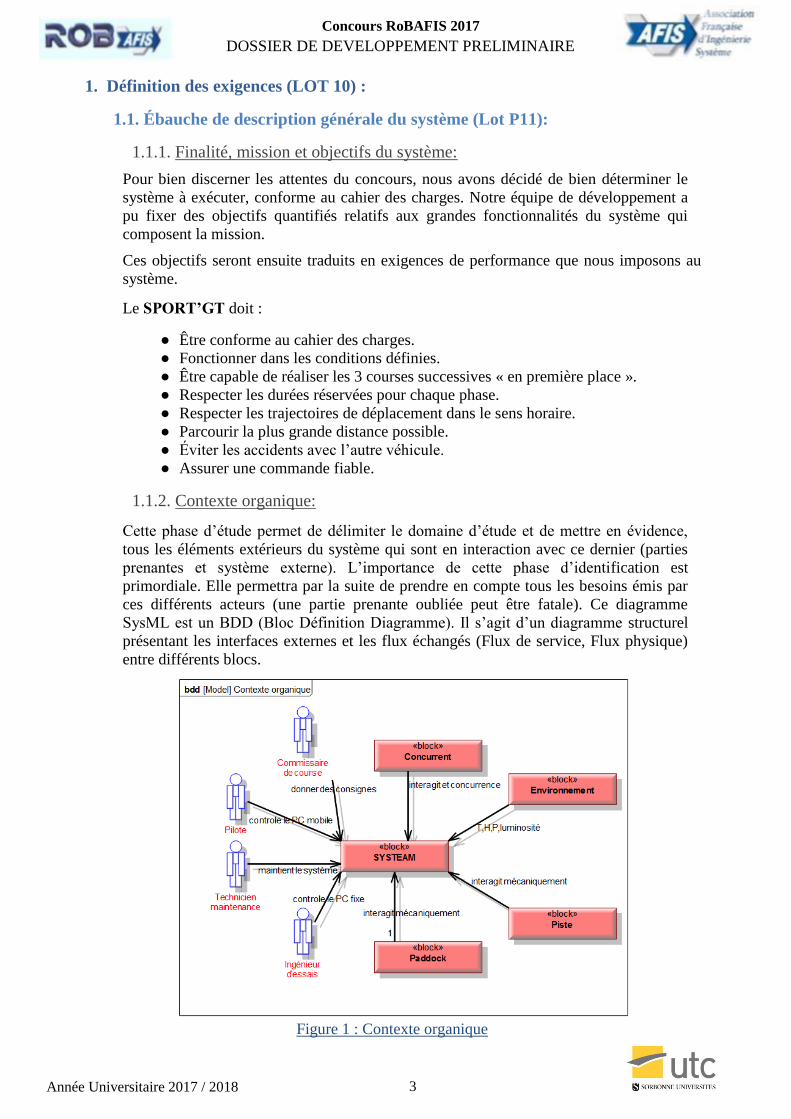
1.1.2. Contexte organique:
Cette phase d’étude permet de délimiter le domaine d’étude et de mettre en évidence,
tous les éléments extérieurs du système qui sont en interaction avec ce dernier (parties
prenantes et système externe). L’importance de cette phase d’identification est
primordiale. Elle permettra par la suite de prendre en compte tous les besoins émis par
ces différents acteurs (une partie prenante oubliée peut être fatale). Ce diagramme
SysML est un BDD (Bloc Définition Diagramme). Il s’agit d’un diagramme structurel
présentant les interfaces externes et les flux échangés (Flux de service, Flux physique)
entre différents blocs.
Figure 1 : Contexte organique
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
4
Année Universitaire 2017 / 2018
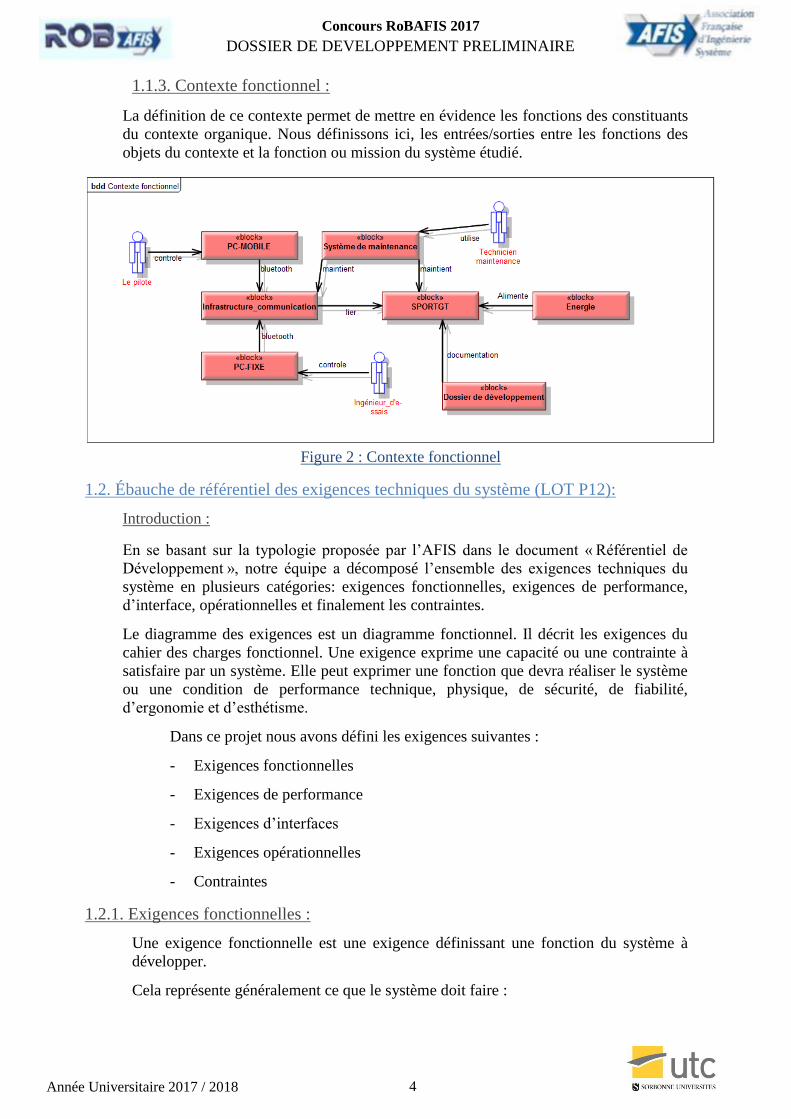
1.1.3. Contexte fonctionnel :
La définition de ce contexte permet de mettre en évidence les fonctions des constituants
du contexte organique. Nous définissons ici, les entrées/sorties entre les fonctions des
objets du contexte et la fonction ou mission du système étudié.
Figure 2 : Contexte fonctionnel
1.2. Ébauche de référentiel des exigences techniques du système (LOT P12):
Introduction :
En se basant sur la typologie proposée par l’AFIS dans le document « Référentiel de
Développement », notre équipe a décomposé l’ensemble des exigences techniques du
système en plusieurs catégories: exigences fonctionnelles, exigences de performance,
d’interface, opérationnelles et finalement les contraintes.
Le diagramme des exigences est un diagramme fonctionnel. Il décrit les exigences du
cahier des charges fonctionnel. Une exigence exprime une capacité ou une contrainte à
satisfaire par un système. Elle peut exprimer une fonction que devra réaliser le système
ou une condition de performance technique, physique, de sécurité, de fiabilité,
d’ergonomie et d’esthétisme.
Dans ce projet nous avons défini les exigences suivantes :
- Exigences fonctionnelles
- Exigences de performance
- Exigences d’interfaces
- Exigences opérationnelles
- Contraintes
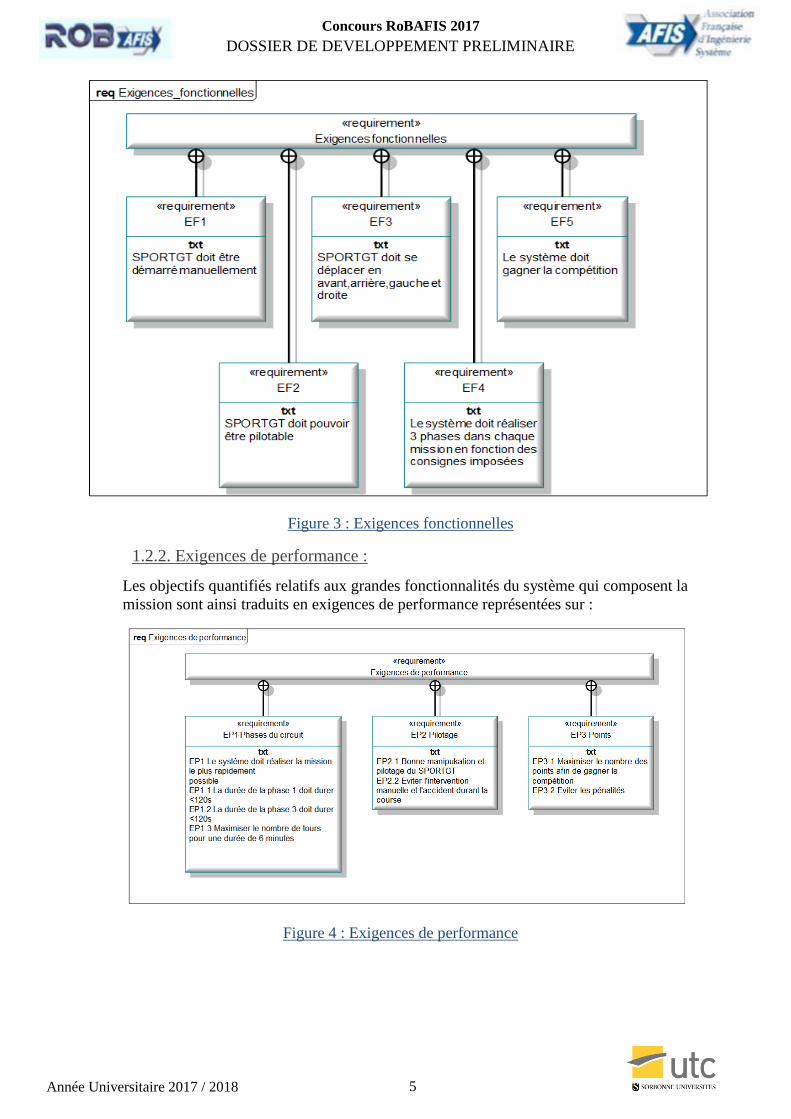
1.2.1. Exigences fonctionnelles :
Une exigence fonctionnelle est une exigence définissant une fonction du système à
développer.
Cela représente généralement ce que le système doit faire :
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
5
Année Universitaire 2017 / 2018
Figure 3 : Exigences fonctionnelles
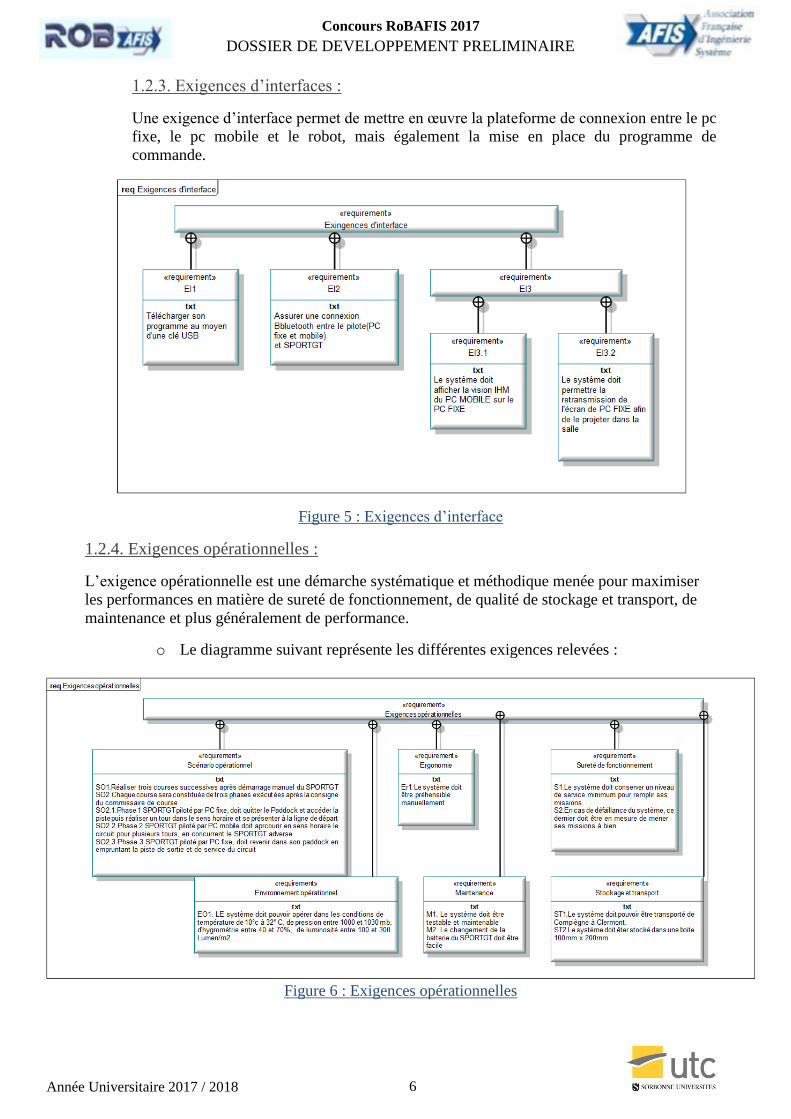
1.2.2. Exigences de performance :
Les objectifs quantifiés relatifs aux grandes fonctionnalités du système qui composent la
mission sont ainsi traduits en exigences de performance représentées sur :
Figure 4 : Exigences de performance
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
6
Année Universitaire 2017 / 2018
1.2.3. Exigences d’interfaces :
Une exigence d’interface permet de mettre en œuvre la plateforme de connexion entre le pc
fixe, le pc mobile et le robot, mais également la mise en place du programme de
commande.
Figure 5 : Exigences d’interface
1.2.4. Exigences opérationnelles :
L’exigence opérationnelle est une démarche systématique et méthodique menée pour maximiser
les performances en matière de sureté de fonctionnement, de qualité de stockage et transport, de
maintenance et plus généralement de performance.
o Le diagramme suivant représente les différentes exigences relevées :
Figure 6 : Exigences opérationnelles
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
7
Année Universitaire 2017 / 2018
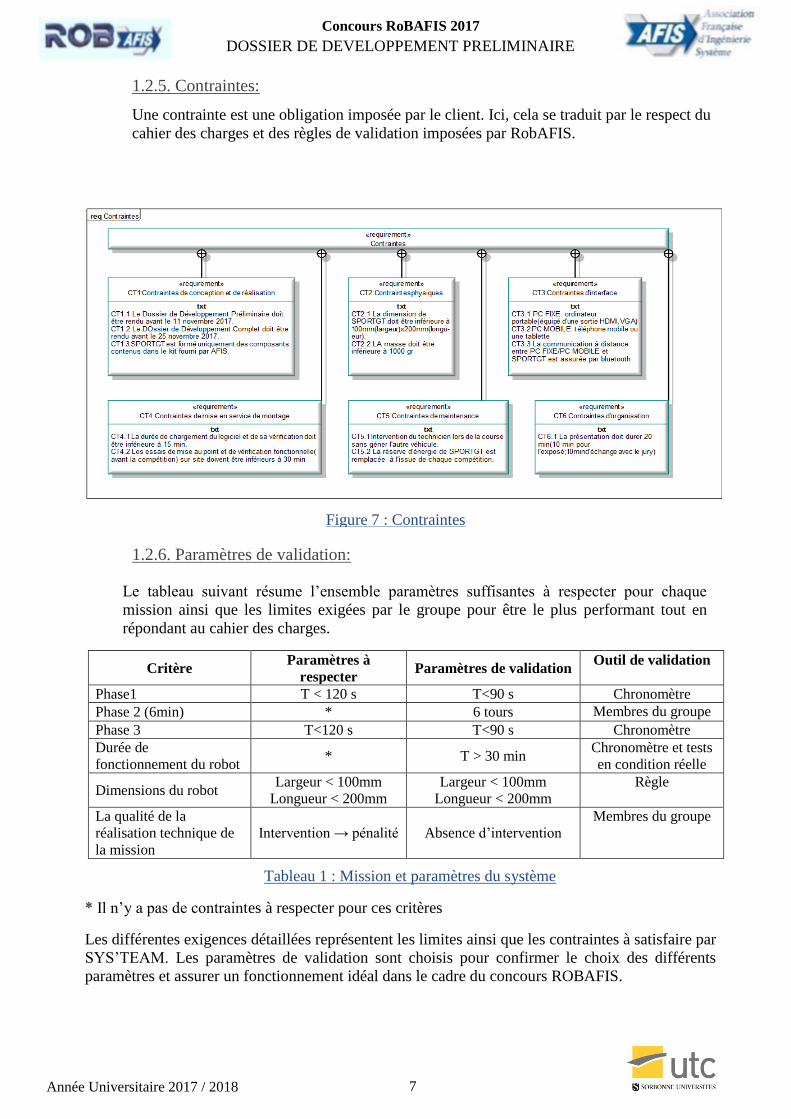
1.2.5. Contraintes:
Une contrainte est une obligation imposée par le client. Ici, cela se traduit par le respect du
cahier des charges et des règles de validation imposées par RobAFIS.
1.2.6. Paramètres de validation:
Le tableau suivant résume l’ensemble paramètres suffisantes à respecter pour chaque
mission ainsi que les limites exigées par le groupe pour être le plus performant tout en
répondant au cahier des charges.
Critère Paramètres à
respecter Paramètres de validation
Outil de validation
Phase1 T < 120 s T<90 s Chronomètre
Phase 2 (6min) * 6 tours Membres du groupe
Phase 3 T<120 s T<90 s Chronomètre
Durée de
fonctionnement du robot * T > 30 min
Chronomètre et tests
en condition réelle
Dimensions du robot Largeur < 100mm
Longueur < 200mm
Largeur < 100mm
Longueur < 200mm
Règle
La qualité de la
réalisation technique de
la mission
Intervention → pénalité Absence d’intervention
Membres du groupe
Tableau 1 : Mission et paramètres du système
* Il n’y a pas de contraintes à respecter pour ces critères
Les différentes exigences détaillées représentent les limites ainsi que les contraintes à satisfaire par
SYS’TEAM. Les paramètres de validation sont choisis pour confirmer le choix des différents
paramètres et assurer un fonctionnement idéal dans le cadre du concours ROBAFIS.
Figure 7 : Contraintes
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
8
Année Universitaire 2017 / 2018
2. DOSSIER DE CONCEPTION ARCHITECTURALE DU SYSTEME (LOT 20) :
2.1. DESCRIPTION GENERALE (LOT 21) :
Cette partie du projet s’attache à étudier les différentes solutions possibles pour construire un
robot satisfaisant toutes les exigences présentées précédemment. Les solutions sont basées aux
matériels à notre disposition et des possibilités avec les pièces Lego. Globalement, pour garder la
simplicité du système, nous avons décomposé le SYS’TEAM en 4 grand sous-systèmes, chaque
sous-système assure une fonction principale : Sous-système de déplacement, Sous-système de
commande, Sous-système de châssis, Sous système d’alimentation.
2.1.1. Sous-système de déplacement:
Ce sous-système comporte tous les éléments qui permettent le véhicule de se déplacer, il se
compose de trois parties principales : le nombre de roues, la propulsion et l’orientation.
Ce sous-système peut être composé de :
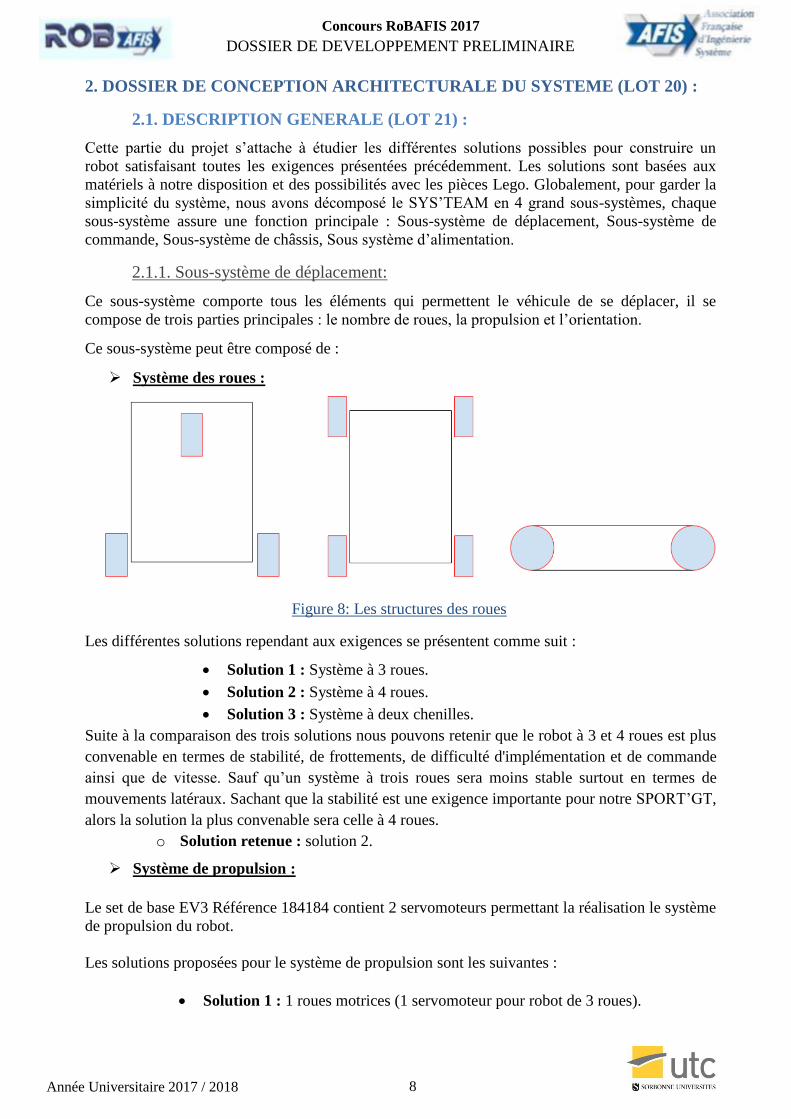
Système des roues :
Les différentes solutions rependant aux exigences se présentent comme suit :
Solution 1 : Système à 3 roues.
Solution 2 : Système à 4 roues.
Solution 3 : Système à deux chenilles.
Suite à la comparaison des trois solutions nous pouvons retenir que le robot à 3 et 4 roues est plus
convenable en termes de stabilité, de frottements, de difficulté d'implémentation et de commande
ainsi que de vitesse. Sauf qu’un système à trois roues sera moins stable surtout en termes de
mouvements latéraux. Sachant que la stabilité est une exigence importante pour notre SPORT’GT,
alors la solution la plus convenable sera celle à 4 roues.
o Solution retenue : solution 2.
Système de propulsion :
Le set de base EV3 Référence 184184 contient 2 servomoteurs permettant la réalisation le système
de propulsion du robot.
Les solutions proposées pour le système de propulsion sont les suivantes :
Solution 1 : 1 roues motrices (1 servomoteur pour robot de 3 roues).
Figure 8: Les structures des roues
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
9
Année Universitaire 2017 / 2018
Solution 2 : 2 roues motrices à traction arrière avec 1 servomoteur.
Solution 3 : 2 roues motrices à traction arrière avec 2 servomoteurs.
Selon notre recherche, le choix d’un robot de deux roues motrices à traction arrière apporte une
certaine stabilité nécessaire au système, prenant en compte le poids non suspendu pour assurer la
mission dans de meilleures conditions.
Un robot de 2 servomoteurs dépasse la largeur acceptable (Contrainte physique CT2) si on
souhaite concevoir un robot symétrique. Un robot asymétrique diminue la stabilité et augmente la
difficulté de commande du système. Alors un robot de 2 roues motrices à traction arrière avec 1
servomoteur sera la solution finale pour le SPORT’GT.
o Solution retenue : Solution 2.
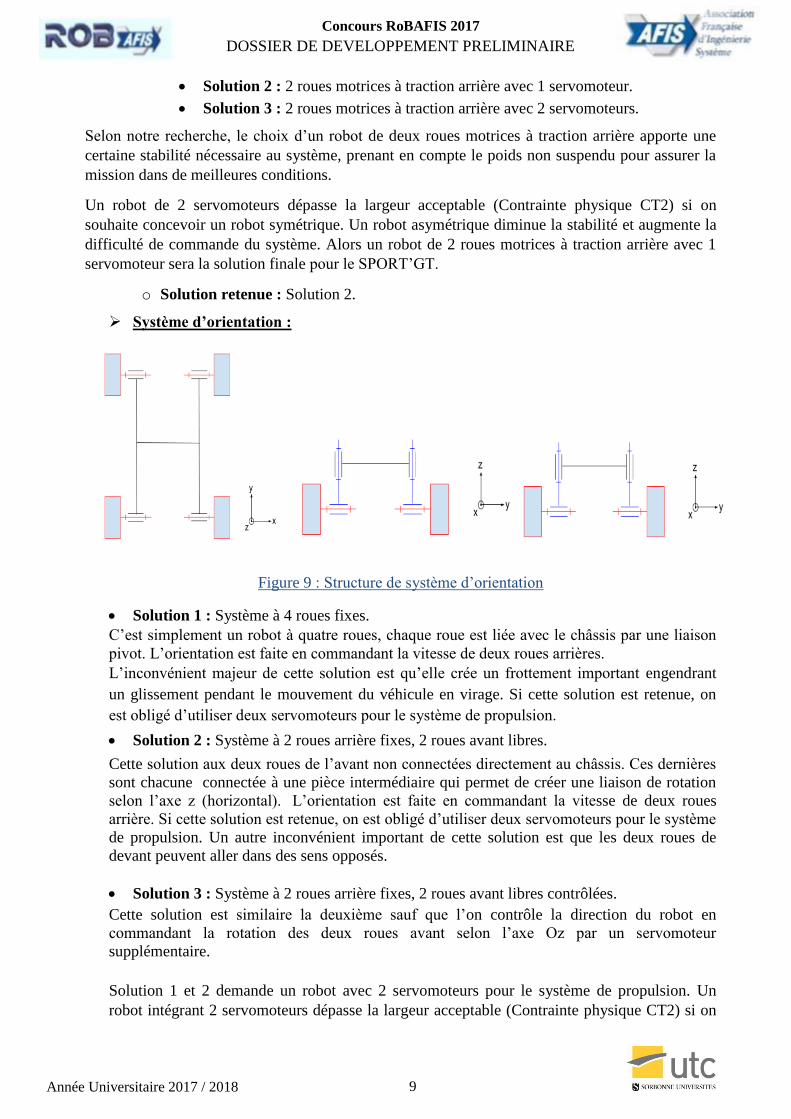
Système d’orientation :
Figure 9 : Structure de système d’orientation
Solution 1 : Système à 4 roues fixes.
C’est simplement un robot à quatre roues, chaque roue est liée avec le châssis par une liaison
pivot. L’orientation est faite en commandant la vitesse de deux roues arrières.
L’inconvénient majeur de cette solution est qu’elle crée un frottement important engendrant
un glissement pendant le mouvement du véhicule en virage. Si cette solution est retenue, on
est obligé d’utiliser deux servomoteurs pour le système de propulsion.
Solution 2 : Système à 2 roues arrière fixes, 2 roues avant libres.
Cette solution aux deux roues de l’avant non connectées directement au châssis. Ces dernières
sont chacune connectée à une pièce intermédiaire qui permet de créer une liaison de rotation
selon l’axe z (horizontal). L’orientation est faite en commandant la vitesse de deux roues
arrière. Si cette solution est retenue, on est obligé d’utiliser deux servomoteurs pour le système
de propulsion. Un autre inconvénient important de cette solution est que les deux roues de
devant peuvent aller dans des sens opposés.
Solution 3 : Système à 2 roues arrière fixes, 2 roues avant libres contrôlées.
Cette solution est similaire la deuxième sauf que l’on contrôle la direction du robot en
commandant la rotation des deux roues avant selon l’axe Oz par un servomoteur
supplémentaire.
Solution 1 et 2 demande un robot avec 2 servomoteurs pour le système de propulsion. Un
robot intégrant 2 servomoteurs dépasse la largeur acceptable (Contrainte physique CT2) si on
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
10
Année Universitaire 2017 / 2018
souhaite concevoir un robot symétrique. Un robot asymétrique n’est pas envisagé pour des
raisons de stabilité et de difficulté de commande du système. Donc la solution 3 sera plus
stable et plus facile à commander.
Solution retenue: solution 3
Solution globale retenue : Le système sera équipé de 4 roues, 2 roues motrices à traction
arrière avec 1 servomoteur.
Cette solution conserve la simplicité et la performance du système tout en respectant le
nombre de roues disponibles dans Kit LEGO. Les 4 roues donnent la stabilité au système,
les 2 servomoteurs réduisent la consommation d’énergie ainsi que le poids global.
2.1.2. Sous-système de châssis :
Ce sous-système contient tous les éléments qui constituent le bâti et détermine le mode
d’assemblage selon la solution choisie. Il dispose de trois caractéristiques importantes qui
constituent les trois solutions proposées :
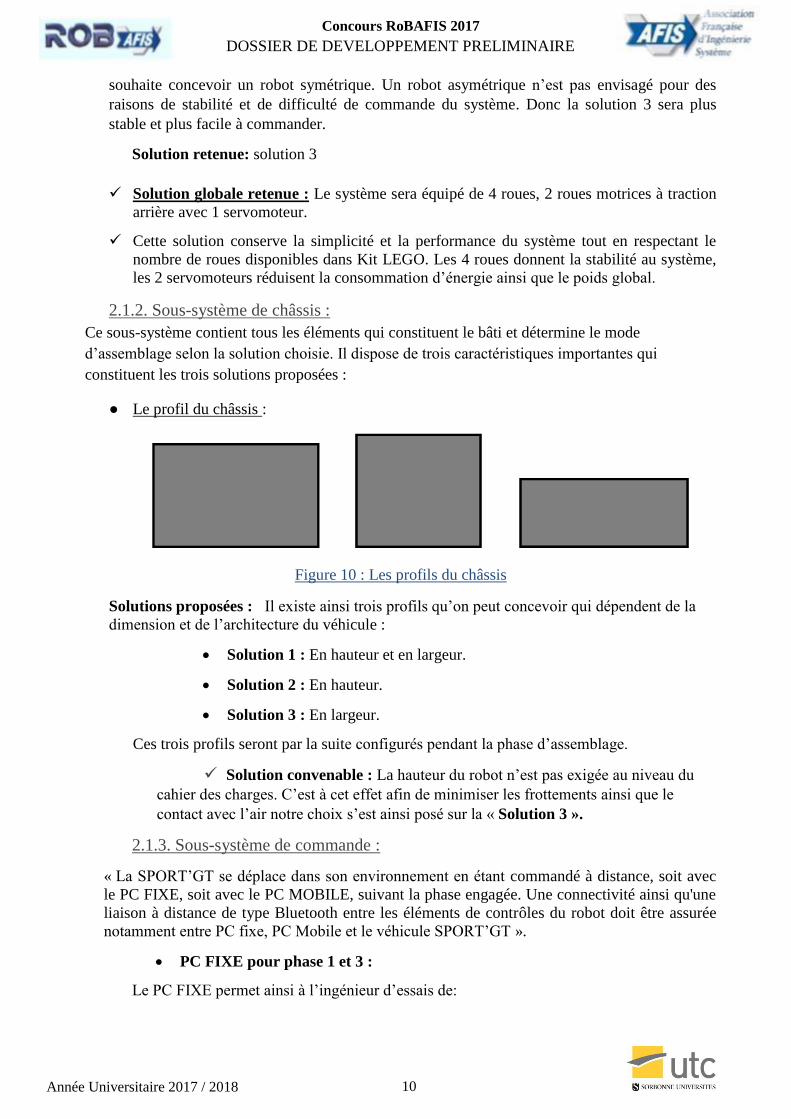
● Le profil du châssis :
Figure 10 : Les profils du châssis
Solutions proposées : Il existe ainsi trois profils qu’on peut concevoir qui dépendent de la
dimension et de l’architecture du véhicule :
Solution 1 : En hauteur et en largeur.
Solution 2 : En hauteur.
Solution 3 : En largeur.
Ces trois profils seront par la suite configurés pendant la phase d’assemblage.
Solution convenable : La hauteur du robot n’est pas exigée au niveau du
cahier des charges. C’est à cet effet afin de minimiser les frottements ainsi que le
contact avec l’air notre choix s’est ainsi posé sur la « Solution 3 ».
2.1.3. Sous-système de commande :
« La SPORT’GT se déplace dans son environnement en étant commandé à distance, soit avec
le PC FIXE, soit avec le PC MOBILE, suivant la phase engagée. Une connectivité ainsi qu'une
liaison à distance de type Bluetooth entre les éléments de contrôles du robot doit être assurée
notamment entre PC fixe, PC Mobile et le véhicule SPORT’GT ».
PC FIXE pour phase 1 et 3 :
Le PC FIXE permet ainsi à l’ingénieur d’essais de:
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
11
Année Universitaire 2017 / 2018
Disposer de l’IHM (Interface Homme Machine) de commande à distance du véhicule,
utilisé pendant les phases 1 et 3.
C’est à cet effet, afin de faciliter le processus de commande à distance, l’ensemble de
l'équipe avait opté pour la mise en place d’une interface de télémanipulation qui sera
connectée directement au PC FIXE : souris ou joystick ou clavier.
1. Clavier : Un des éléments permettant le fonctionnement normal de l’ordinateur, il est certes
un composant externe d’un PC FIXE sauf que la connectivité et plus facile et les “Drivers”
sont déjà disponibles ce qui facilite sa connectivité. Un clavier met en place une interface de
commande très facile à manipuler.
2. Souris : Composant très utile pour la manipulation ainsi que pour la commande mais moins
efficace au niveau de la marche du véhicule SPORT’GT.
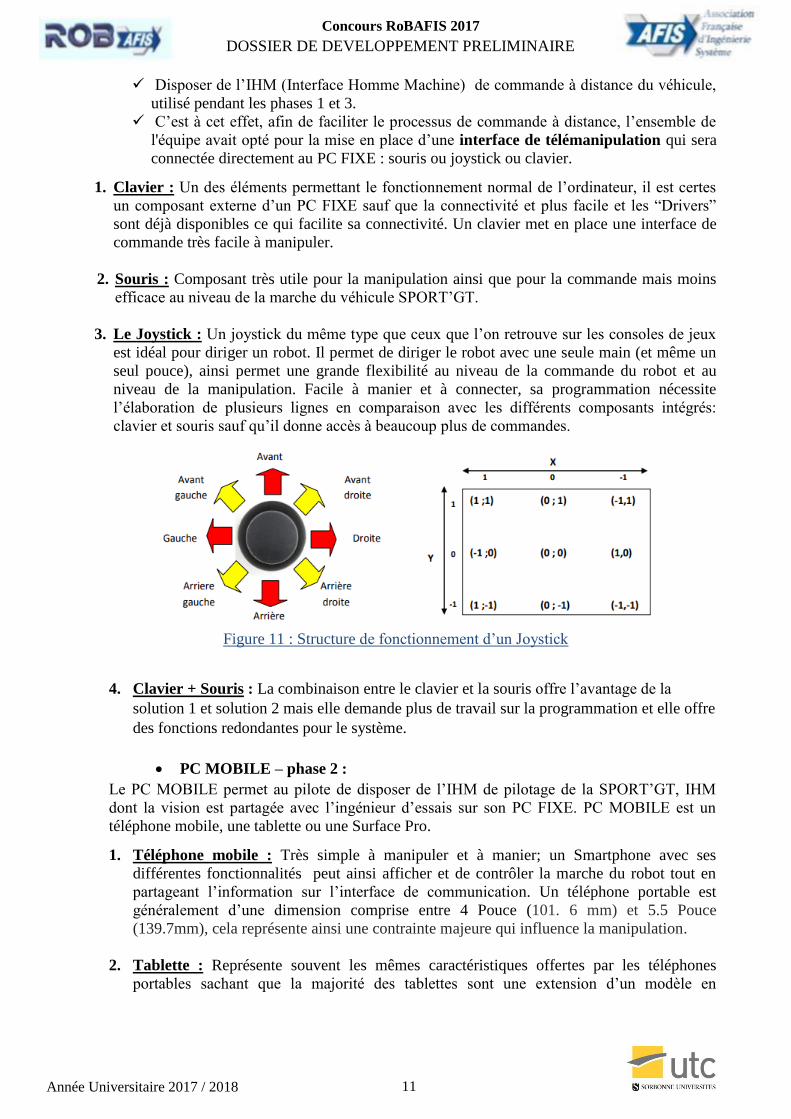
3. Le Joystick : Un joystick du même type que ceux que l’on retrouve sur les consoles de jeux
est idéal pour diriger un robot. Il permet de diriger le robot avec une seule main (et même un
seul pouce), ainsi permet une grande flexibilité au niveau de la commande du robot et au
niveau de la manipulation. Facile à manier et à connecter, sa programmation nécessite
l’élaboration de plusieurs lignes en comparaison avec les différents composants intégrés:
clavier et souris sauf qu’il donne accès à beaucoup plus de commandes.
4. Clavier + Souris : La combinaison entre le clavier et la souris offre l’avantage de la
solution 1 et solution 2 mais elle demande plus de travail sur la programmation et elle offre
des fonctions redondantes pour le système.
PC MOBILE – phase 2 :
Le PC MOBILE permet au pilote de disposer de l’IHM de pilotage de la SPORT’GT, IHM
dont la vision est partagée avec l’ingénieur d’essais sur son PC FIXE. PC MOBILE est un
téléphone mobile, une tablette ou une Surface Pro.
1. Téléphone mobile : Très simple à manipuler et à manier; un Smartphone avec ses
différentes fonctionnalités peut ainsi afficher et de contrôler la marche du robot tout en
partageant l’information sur l’interface de communication. Un téléphone portable est
généralement d’une dimension comprise entre 4 Pouce (101. 6 mm) et 5.5 Pouce
(139.7mm), cela représente ainsi une contrainte majeure qui influence la manipulation.
2. Tablette : Représente souvent les mêmes caractéristiques offertes par les téléphones
portables sachant que la majorité des tablettes sont une extension d’un modèle en
Figure 11 : Structure de fonctionnement d’un Joystick
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
12
Année Universitaire 2017 / 2018
Smartphone. Sauf que cela permet une surface de manipulation plus grande mais par
contre elle diminue sa mobilité et sa compactibilité.
3. Surface Pro : Microsoft Surface est une gamme de tablettes PC conçues et
commercialisées par Microsoft. Cela comprend les tablettes PC (Surface et Surface Pro)
qui apporte les fonctionnalités suivantes :
● Système d’exploitation Windows 8/10 utilisant un processeur 32 ou 64 bits.
● Écran 2160 x 1440 pixels, 12 pouces.
● Poids 800 g sans clavier, épaisseur 9,1 mm.
● Connectique vidéo: Mini DisplayPort.
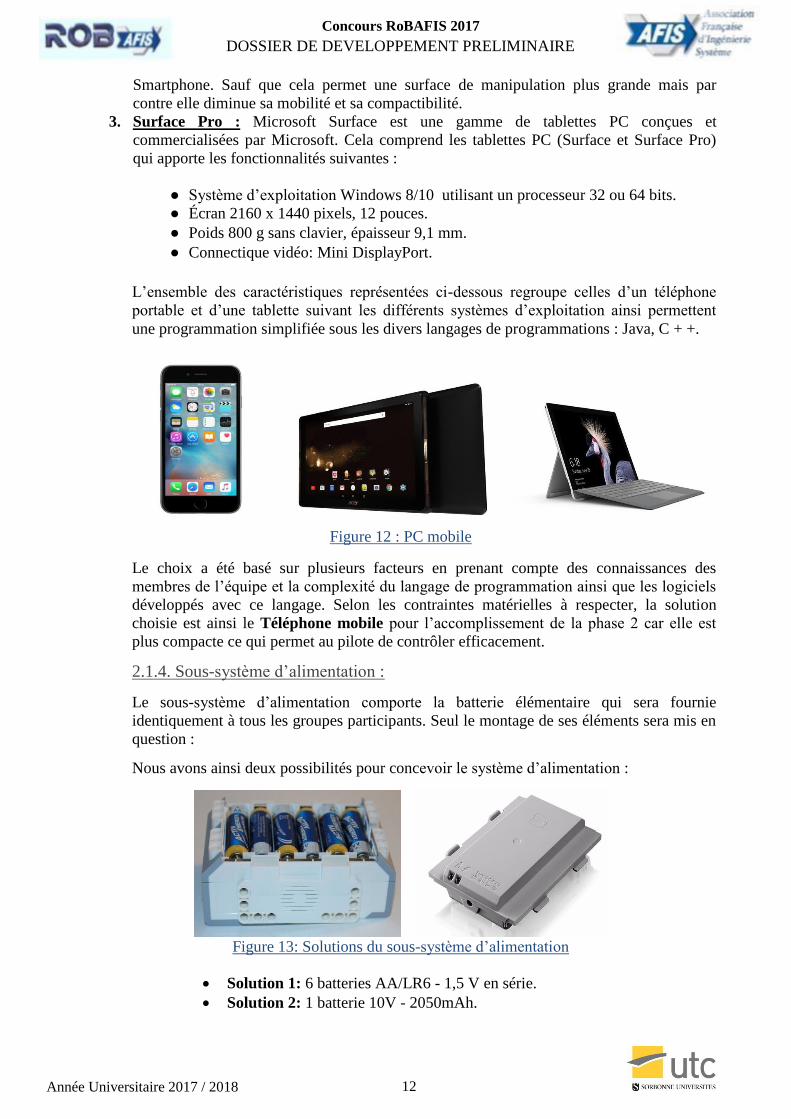
L’ensemble des caractéristiques représentées ci-dessous regroupe celles d’un téléphone
portable et d’une tablette suivant les différents systèmes d’exploitation ainsi permettent
une programmation simplifiée sous les divers langages de programmations : Java, C + +.
Figure 12 : PC mobile
Le choix a été basé sur plusieurs facteurs en prenant compte des connaissances des
membres de l’équipe et la complexité du langage de programmation ainsi que les logiciels
développés avec ce langage. Selon les contraintes matérielles à respecter, la solution
choisie est ainsi le Téléphone mobile pour l’accomplissement de la phase 2 car elle est
plus compacte ce qui permet au pilote de contrôler efficacement.
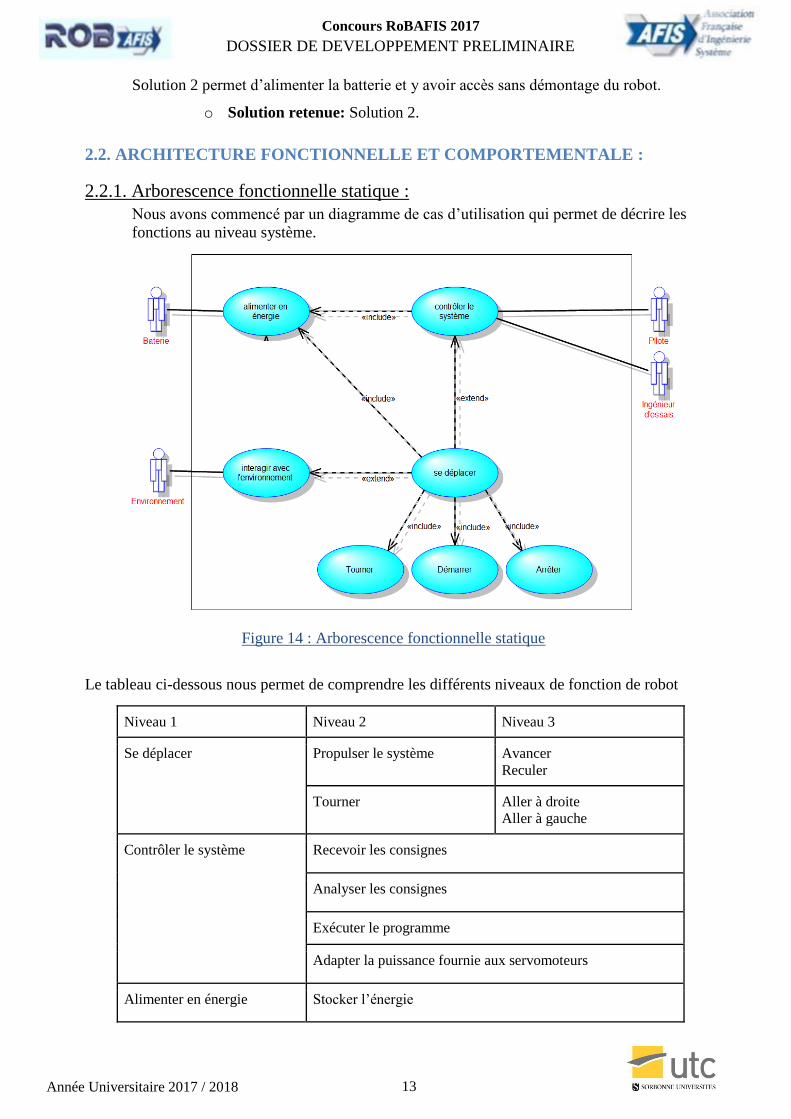
2.1.4. Sous-système d’alimentation :
Le sous-système d’alimentation comporte la batterie élémentaire qui sera fournie
identiquement à tous les groupes participants. Seul le montage de ses éléments sera mis en
question :
Nous avons ainsi deux possibilités pour concevoir le système d’alimentation :
Figure 13: Solutions du sous-système d’alimentation
Solution 1: 6 batteries AA/LR6 - 1,5 V en série.
Solution 2: 1 batterie 10V - 2050mAh.
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
13
Année Universitaire 2017 / 2018
Solution 2 permet d’alimenter la batterie et y avoir accès sans démontage du robot.
o Solution retenue: Solution 2.
2.2. ARCHITECTURE FONCTIONNELLE ET COMPORTEMENTALE :
2.2.1. Arborescence fonctionnelle statique :
Nous avons commencé par un diagramme de cas d’utilisation qui permet de décrire les
fonctions au niveau système.
Le tableau ci-dessous nous permet de comprendre les différents niveaux de fonction de robot
Niveau 1 Niveau 2 Niveau 3
Se déplacer Propulser le système Avancer
Reculer
Tourner Aller à droite
Aller à gauche
Contrôler le système Recevoir les consignes
Analyser les consignes
Exécuter le programme
Adapter la puissance fournie aux servomoteurs
Alimenter en énergie Stocker l’énergie
Figure 14 : Arborescence fonctionnelle statique
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
14
Année Universitaire 2017 / 2018
Fournir de l’énergie
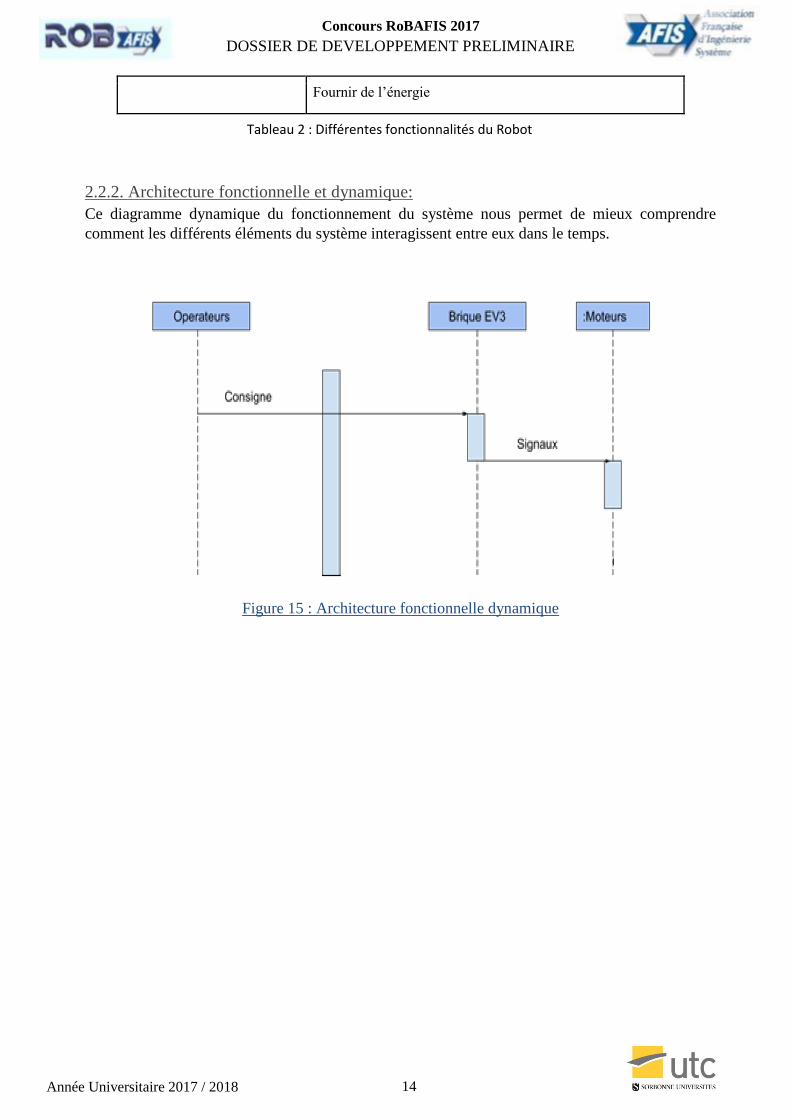
2.2.2. Architecture fonctionnelle et dynamique:
Ce diagramme dynamique du fonctionnement du système nous permet de mieux comprendre
comment les différents éléments du système interagissent entre eux dans le temps.
Figure 15 : Architecture fonctionnelle dynamique
Tableau 2 : Différentes fonctionnalités du Robot
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
15
Année Universitaire 2017 / 2018
2.3. EBAUCHE D’ARCHITECTURE ORGANIQUE/PHYSIQUE DU SYSTEME (LOT
23) :
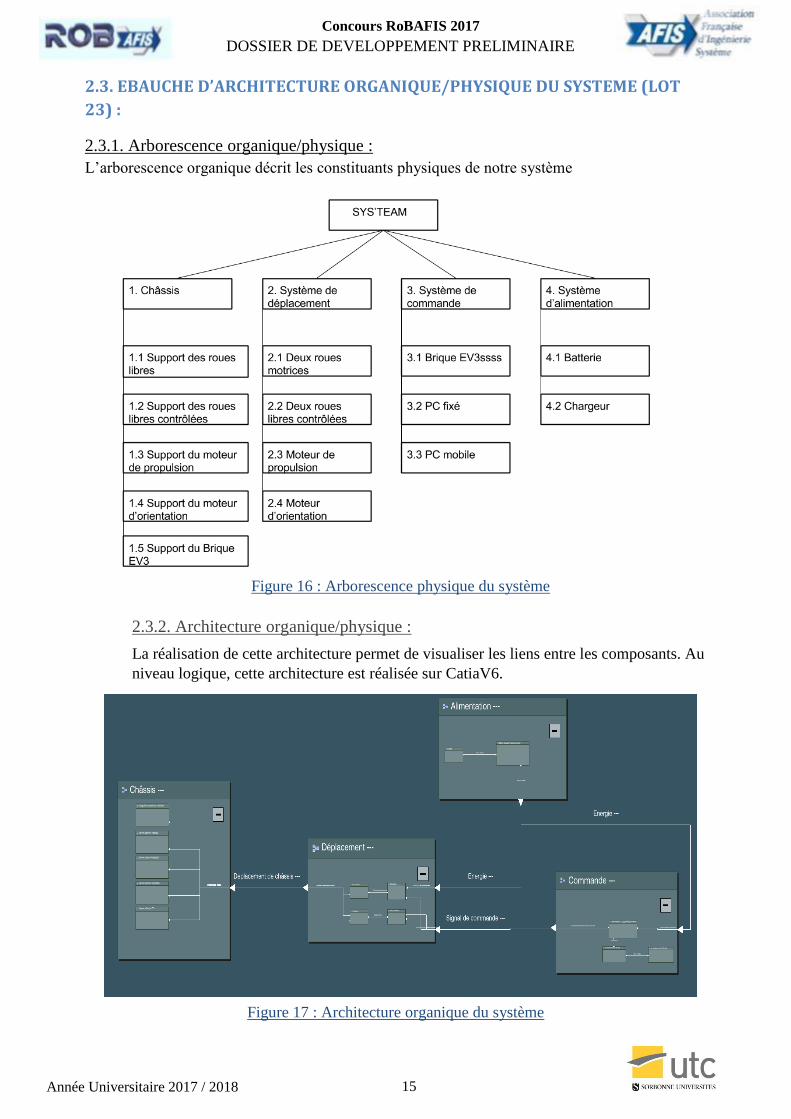
2.3.1. Arborescence organique/physique :
L’arborescence organique décrit les constituants physiques de notre système
Figure 16 : Arborescence physique du système
2.3.2. Architecture organique/physique :
La réalisation de cette architecture permet de visualiser les liens entre les composants. Au
niveau logique, cette architecture est réalisée sur CatiaV6.
Figure 17 : Architecture organique du système
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
16
Année Universitaire 2017 / 2018
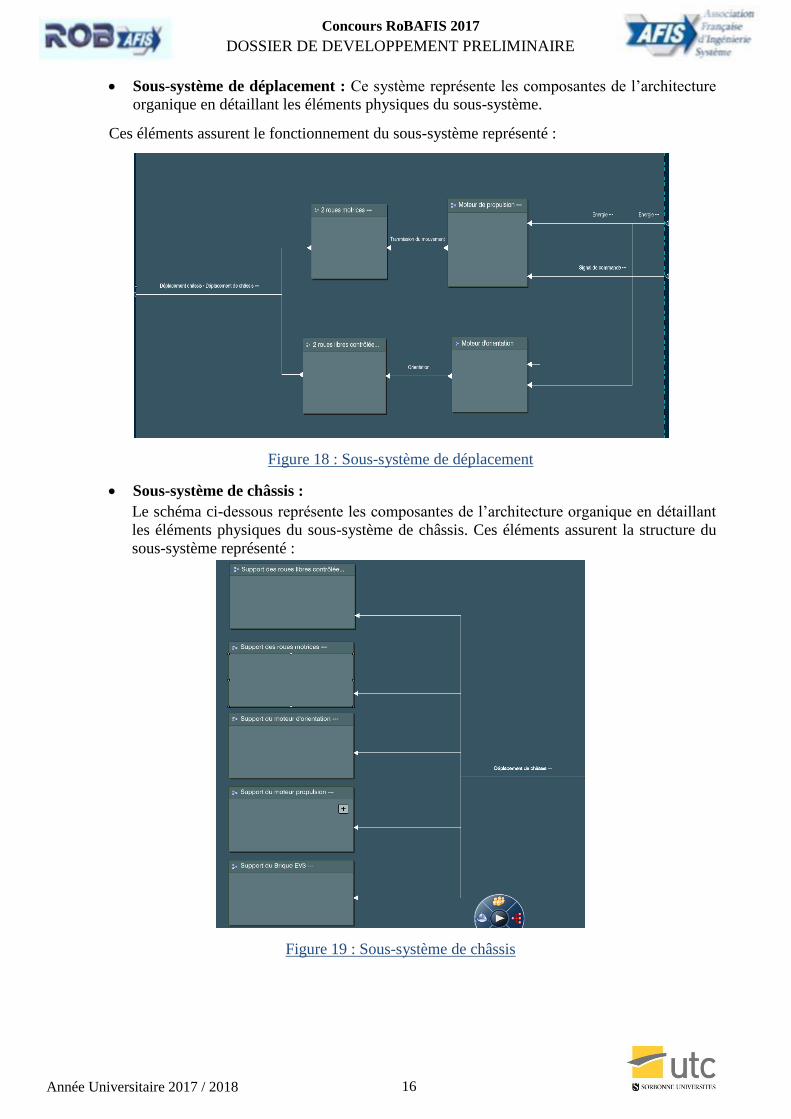
Sous-système de déplacement : Ce système représente les composantes de l’architecture
organique en détaillant les éléments physiques du sous-système.
Ces éléments assurent le fonctionnement du sous-système représenté :
Figure 18 : Sous-système de déplacement
Sous-système de châssis :
Le schéma ci-dessous représente les composantes de l’architecture organique en détaillant
les éléments physiques du sous-système de châssis. Ces éléments assurent la structure du
sous-système représenté :
Figure 19 : Sous-système de châssis
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
17
Année Universitaire 2017 / 2018
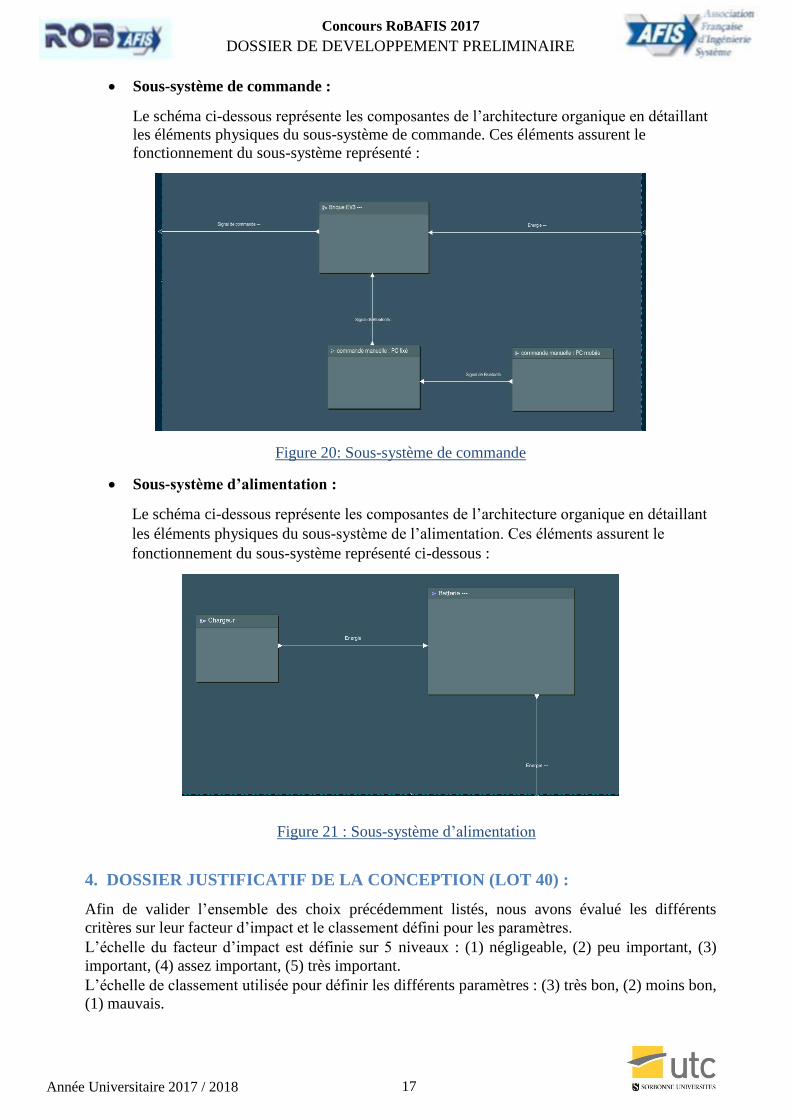
Sous-système de commande :
Le schéma ci-dessous représente les composantes de l’architecture organique en détaillant
les éléments physiques du sous-système de commande. Ces éléments assurent le
fonctionnement du sous-système représenté :
Figure 20: Sous-système de commande
Sous-système d’alimentation :
Le schéma ci-dessous représente les composantes de l’architecture organique en détaillant
les éléments physiques du sous-système de l’alimentation. Ces éléments assurent le
fonctionnement du sous-système représenté ci-dessous :
4. DOSSIER JUSTIFICATIF DE LA CONCEPTION (LOT 40) :
Afin de valider l’ensemble des choix précédemment listés, nous avons évalué les différents
critères sur leur facteur d’impact et le classement défini pour les paramètres.
L’échelle du facteur d’impact est définie sur 5 niveaux : (1) négligeable, (2) peu important, (3)
important, (4) assez important, (5) très important.
L’échelle de classement utilisée pour définir les différents paramètres : (3) très bon, (2) moins bon,
(1) mauvais.
Figure 21 : Sous-système d’alimentation
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
18
Année Universitaire 2017 / 2018
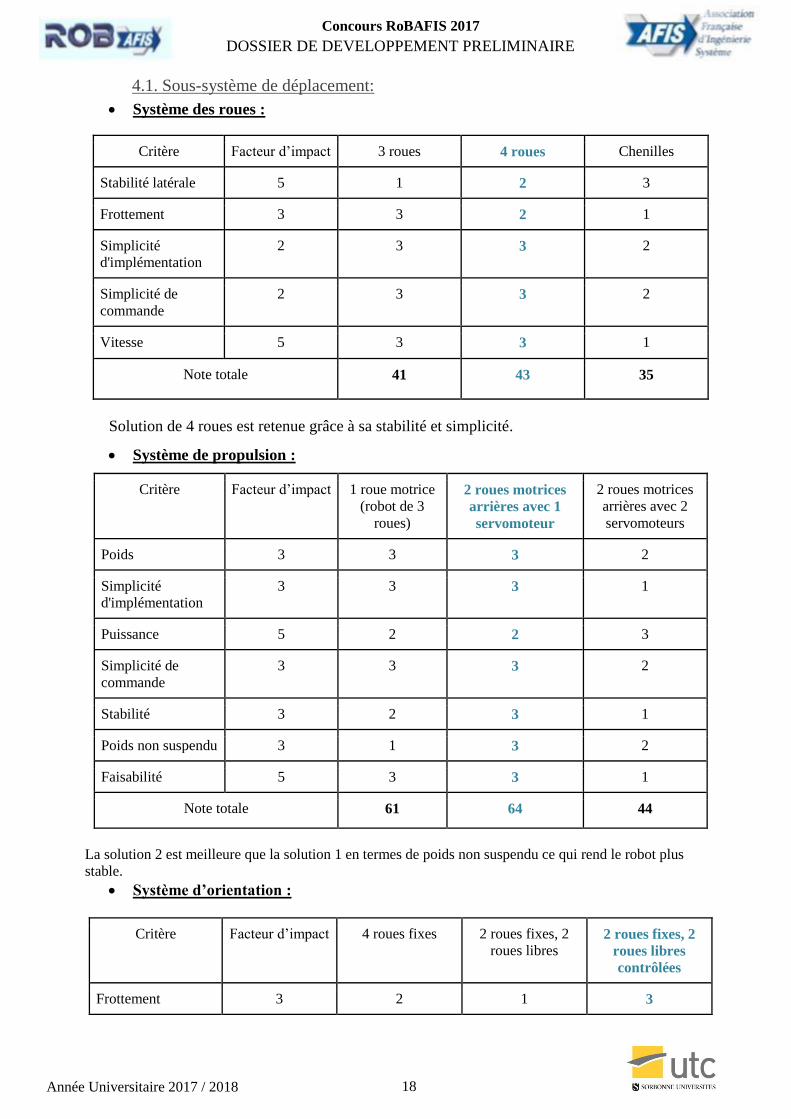
4.1. Sous-système de déplacement:
Système des roues :
Critère Facteur d’impact 3 roues 4 roues Chenilles
Stabilité latérale 5 1 2 3
Frottement 3 3 2 1
Simplicité
d'implémentation
2 3 3 2
Simplicité de
commande
2 3 3 2
Vitesse 5 3 3 1
Note totale 41 43 35
Solution de 4 roues est retenue grâce à sa stabilité et simplicité.
Système de propulsion :
Critère Facteur d’impact 1 roue motrice
(robot de 3
roues)
2 roues motrices
arrières avec 1
servomoteur
2 roues motrices
arrières avec 2
servomoteurs
Poids 3 3 3 2
Simplicité
d'implémentation
3 3 3 1
Puissance 5 2 2 3
Simplicité de
commande
3 3 3 2
Stabilité 3 2 3 1
Poids non suspendu 3 1 3 2
Faisabilité 5 3 3 1
Note totale 61 64 44
La solution 2 est meilleure que la solution 1 en termes de poids non suspendu ce qui rend le robot plus
stable.
Système d’orientation :
Critère Facteur d’impact 4 roues fixes 2 roues fixes, 2
roues libres 2 roues fixes, 2
roues libres
contrôlées
Frottement 3 2 1 3
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
19
Année Universitaire 2017 / 2018
Simplicité
d'implémentation
3 1 1 3
Temps de réponse
de commande
3 2 1 3
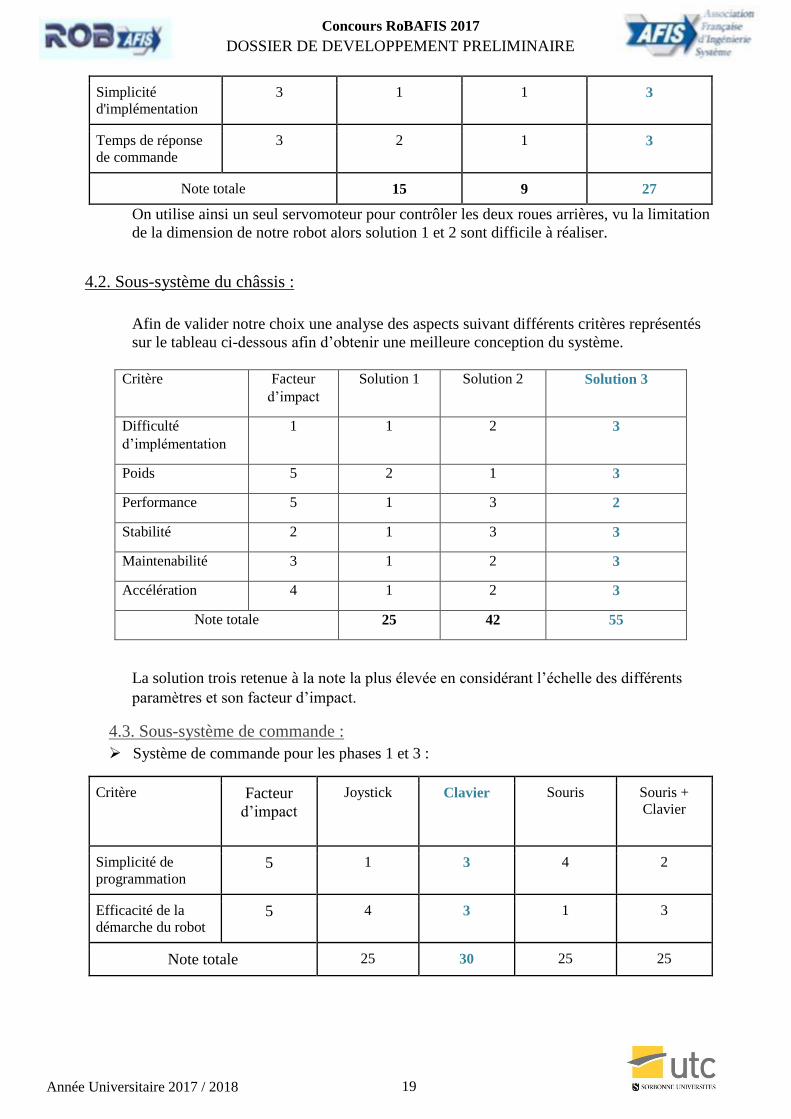
Note totale 15 9 27
On utilise ainsi un seul servomoteur pour contrôler les deux roues arrières, vu la limitation
de la dimension de notre robot alors solution 1 et 2 sont difficile à réaliser.
4.2. Sous-système du châssis :
Afin de valider notre choix une analyse des aspects suivant différents critères représentés
sur le tableau ci-dessous afin d’obtenir une meilleure conception du système.
Critère Facteur
d’impact
Solution 1 Solution 2 Solution 3
Difficulté
d’implémentation
1 1 2 3
Poids 5 2 1 3
Performance 5 1 3 2
Stabilité 2 1 3 3
Maintenabilité 3 1 2 3
Accélération 4 1 2 3
Note totale 25 42 55
La solution trois retenue à la note la plus élevée en considérant l’échelle des différents
paramètres et son facteur d’impact.
4.3. Sous-système de commande :
Système de commande pour les phases 1 et 3 :
Critère Facteur
d’impact
Joystick Clavier Souris Souris +
Clavier
Simplicité de
programmation 5 1 3 4 2
Efficacité de la
démarche du robot 5 4 3 1 3
Note totale 25 30 25 25
Concours RoBAFIS 2017
DOSSIER DE DEVELOPPEMENT PRELIMINAIRE
20
Année Universitaire 2017 / 2018
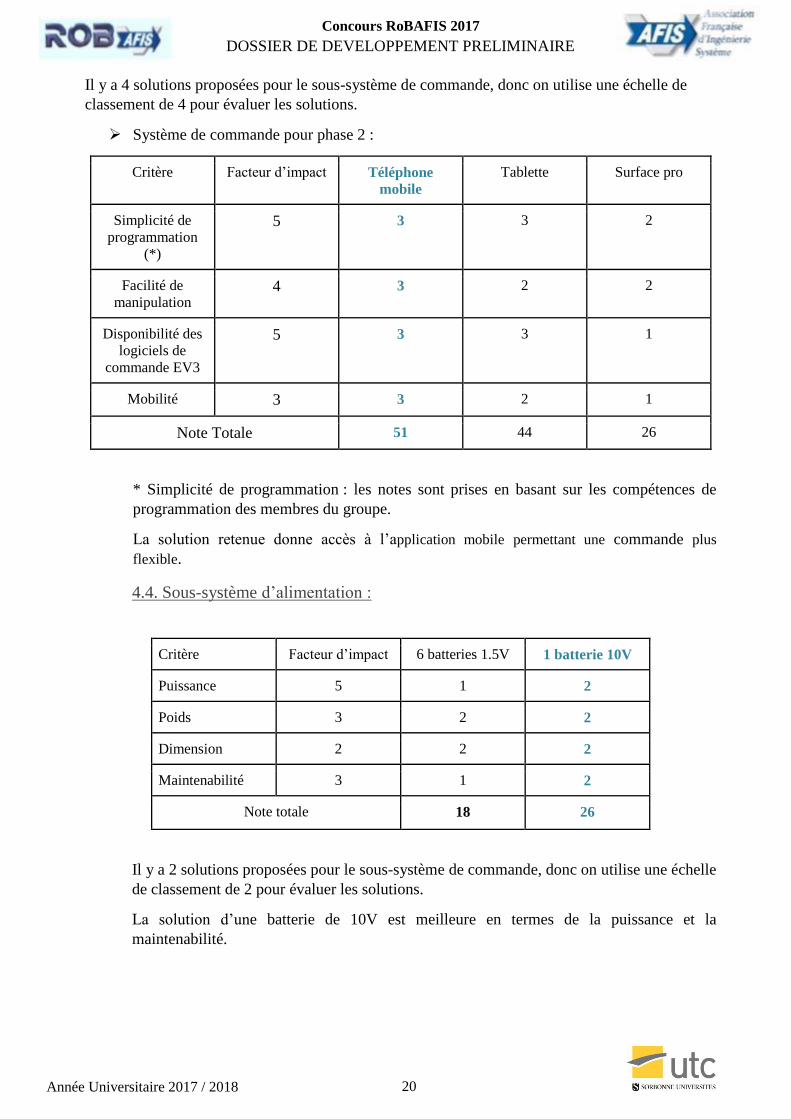
Il y a 4 solutions proposées pour le sous-système de commande, donc on utilise une échelle de
classement de 4 pour évaluer les solutions.
Système de commande pour phase 2 :
Critère Facteur d’impact Téléphone
mobile
Tablette Surface pro
Simplicité de
programmation
(*)
5 3 3 2
Facilité de
manipulation 4 3 2 2
Disponibilité des
logiciels de
commande EV3
5 3 3 1
Mobilité 3 3 2 1
Note Totale 51 44 26
* Simplicité de programmation : les notes sont prises en basant sur les compétences de
programmation des membres du groupe.
La solution retenue donne accès à l’application mobile permettant une commande plus
flexible.
4.4. Sous-système d’alimentation :
Critère Facteur d’impact 6 batteries 1.5V 1 batterie 10V
Puissance 5 1 2
Poids 3 2 2
Dimension 2 2 2
Maintenabilité 3 1 2
Note totale 18 26
Il y a 2 solutions proposées pour le sous-système de commande, donc on utilise une échelle
de classement de 2 pour évaluer les solutions.
La solution d’une batterie de 10V est meilleure en termes de la puissance et la
maintenabilité.