Embed Size (px)
Citation preview

EEEVVVAAALLLUUUAAACCCIIIÓÓÓNNN DDDEEE UUUNNNAAA LLLEEEYYY DDDEEE CCCOOONNNTTTRRROOOLLL PPPRRREEEDDDIIICCCTTTIIIVVVOOO
AAADDDAAAPPPTTTAAATTTIIIVVVOOO PPPAAARRRAAA UUUNNN PPPRRROOOCCCEEESSSOOO DDDEEE MMMEEEZZZCCCLLLAAA CCCOOONNN
RRREEETTTAAARRRDDDOOO VVVAAARRRIIIAAABBBLLLEEE
AAAUUUTTTOOORRR::: RRRAAAMMMÍÍÍRRREEEZZZ MMMOOORRRAAALLLEEESSS JJJOOOSSSÉÉÉ RRR... TTTUUUTTTOOORRR::: DDDRRR... JJJEEEAAANNN CCCLLLAAAUUUDDDEEE DDDUUULLLHHHOOOSSSTTTEEE...
PPPRRROOOYYYEEECCCTTTOOO DDDEEE GGGRRRAAADDDOOO PPPRRREEESSSEEENNNTTTAAADDDOOO AAANNNTTTEEE LLLAAA IIILLLUUUSSSTTTRRREEE UUUNNNIIIVVVEEERRRSSSIIIDDDAAADDD DDDEEE LLLOOOSSS AAANNNDDDEEESSS CCCOOOMMMOOO RRREEEQQQUUUIIISSSIIITTTOOO FFFIIINNNAAALLL PPPAAARRRAAA OOOPPPTTTAAARRR AAALLL TTTIIITTTUUULLLOOO DDDEEE
IIINNNGGGEEENNNIIIEEERRROOO DDDEEE SSSIIISSSTTTEEEMMMAAASSS
UUUNNNIIIVVVEEERRRSSSIIIDDDAAADDD DDDEEE LLLOOOSSS AAANNNDDDEEESSS FFFAAACCCUUULLLTTTAAADDD DDDEEE IIINNNGGGEEENNNIIIEEERRRÍÍÍAAA
EEESSSCCCUUUEEELLLAAA DDDEEE IIINNNGGGEEENNNIIIEEERRRÍÍÍAAA DDDEEE SSSIIISSSTTTEEEMMMAAASSS MMMÉÉÉRRRIIIDDDAAA --- VVVEEENNNEEEZZZUUUEEELLLAAA
222000000222
Reconocimiento

2
EEEVVVAAALLLUUUAAACCCIIIÓÓÓNNN DDDEEE UUUNNNAAA LLLEEEYYY DDDEEE CCCOOONNNTTTRRROOOLLL PPPRRREEEDDDIIICCCTTTIIIVVVOOO
AAADDDAAAPPPTTTAAATTTIIIVVVOOO PPPAAARRRAAA UUUNNN PPPRRROOOCCCEEESSSOOO DDDEEE MMMEEEZZZCCCLLLAAA CCCOOONNN
RRREEETTTAAARRRDDDOOO VVVAAARRRIIIAAABBBLLLEEE
Reconocimiento

3
Escuela de Ingenieria de Sistemas
Los suscritos miembros de Jurado designado para evaluar el Proyecto de Grado: ”EVALUACIÓN DE UNA LEY DE CONTROL PREDICTIVO ADAPTATIVO PARA UN PROCESO DE MEZCLA CON RETARDO VARIABLE”. Del Bachiller: JOSE RODRIGO RAMÍREZ MORALES. C.I. N° V-12.540.611 Han resuelto de acuerdo a lo pautado en el Artículo 13 del Reglamento de Proyecto de Grado, colocar la calificación de: Diecinueve puntos 19 puntos Letra Número
Jean C. Dulhoste Claudia Gómez Richard Márquez Profesor Tutor Profesora Jurado Profesor Jurado En Mérida, 18.04.02.
Av. Tulio Febres Cordero. Tlf. (0272) 2402981 – 2402979. Fax 2402979. Mérida 5101 A.
Reconocimiento

4
AAA DDDIIIOOOSSS PPPAAADDDRRREEE TTTOOODDDOOOPPPOOODDDEEERRROOOSSSOOO YYY AAA LLLAAA VVVIIIRRRGGGEEENNN SSSAAANNNTTTÍÍÍSSSIIIMMMAAA,,, PPPOOORRR DDDAAARRRMMMEEE LLLUUUZZZ,,, VVVIIIDDDAAA,,, SSSAAALLLUUUDDD YYY SSSEEERRR MMMIIISSS GGGUUUIIIAAA HHHAAACCCIIIAAA EEELLL ÉÉÉXXXIIITTTOOO JJJUUUNNNTTTAAADDDOOO “““AAA MMMIII AAAMMMIIIGGGOOO DDDEEELLL AAALLLMMMAAA”””
JJJEEESSSÚÚÚSSS DDDEEE NNNAAAZZZAAARRREEENNNOOO...
AAA MMMIII AAABBBUUUEEELLLAAA,,, AAABBBUUUEEELLLOOO(((+++))),,, MMMIII MMMAAADDDRRREEE,,, TTTÍÍÍAAASSS,,, TTTÍÍÍOOOSSS,,, DDDEEE UUUSSSTTTEEEDDDEEESSS AAAPPPRRREEENNNDDDIII EEELLL CCCAAAMMMIIINNNOOO DDDEEE VVVIIIVVVIIIRRR YYY LLLUUUCCCHHHAAARRR PPPOOORRR LLLOOO QQQUUUEEE QQQUUUEEERRREEEMMMOOOSSS,,, GGGRRRAAACCCIIIAAASSS PPPOOORRR AAAPPPOOOYYYAAARRRMMMEEE
AAA CCCOOONNNSSSEEEGGGUUURRRIII UUUNNNAAA DDDEEE MMMIIISSS MMMEEETTTAAASSS LLLOOOSSS AAAMMMOOO...
BBBEEENNNDDDIIICCCIIIÓÓÓNNN...
AAALLL PPPRRROOOFFFEEESSSOOORRR JJJEEEAAANNN CCC... DDDUUULLLHHHOOOSSSTTTEEE,,, UUUNNNAAA VVVEEEZZZ MMMÁÁÁSSS GGGRRRAAACCCIIIAAASSS,,, PPPOOORRR BBBRRRIIINNNDDDAAARRRMMMEEE SSSUUUSSS CCCOOONNNOOOCCCIIIMMMIIIEEENNNTTTOOOSSS YYY EEEXXXPPPEEERRRIIIEEENNNCCCIIIAAA SSSOOONNN AAADDDMMMIIIRRRAAABBBLLLEEESSS,,, PPPAAACCCIIIEEENNNCCCIIIAAA YYY
DDDEEEDDDIIICCCAAACCCIIIÓÓÓNNN...
DEDICATORIA
Reconocimiento

5
Este trabajo presenta el desarrollo de un algoritmo de control predictivo
adaptativo, el cual es aplicado a un proceso de mezclado con retardo variable.
Consiste en construir un modelo lineal del proceso obtenido por identificación
(error de predicción, error de salida), de tal forma de hacer aparecer una
predicción de la salida d pasos o períodos de muestreo hacia adelante con el
fin de desarrollar una ley de control que inducirá la salida predicha al valor de
referencia deseado.
La actualización del modelo se efectúa en cada instante de muestreo, los
cálculos necesarios para el diseño del algoritmo de control pueden ser
fácilmente automatizados, con la ayuda del paquete computacional Matlab. El
control predictivo adaptativo requiere únicamente la información que la
entrada y la salida le aporten. Además se realiza el análisis de la respuesta del
sistema ante variaciones de la señal de referencia, flujo de fluido caliente
(perturbación), factor de ponderación y horizonte de predicción.
RESUMEN
Reconocimiento

6
Resumen ........................................................................................................................ II
Índice ……………………………………………………………………………........ III
Introducción ………………………………………………………………….............. 2
Descriptores ………………………………………………………………….............. 5
Capítulo 1. CONTROL PREDICTIVO GENERALIZADO ................................... 6
1.1 Introducción ................................................................................................. 6
1.2 Filosofía ....................................................................................................... 8
1.3 Control Predictivo Generalizado ................................................................. 10
1.4 Las predicciones optimas con modelo Auto-regresivo y de Media
Móvil Integrado (CARIMA) .............................................................................
12
1.5 Ecuación Diofantina ………………............................................................ 13
Capítulo 2. DESCRIPCIÓN DEL SISTEMA …........…........................................... 16
2.0 Notación ....................................................................................................... 16
2.1 Modelo del Tanque Mezclador .................................................................... 17
2.2 Construcción de un Modelo Discreto ..………............................................ 19
2.3 Método de Identificación ............................................................................. 22
Construcción de Modelos Discretos para el Tanque Mezclador ... 20
Identificación por mínimos cuadrados (error
de predicción) .............................................................................
24
Identificación por mínimos cuadrados (error
de salida) ....................................................................................
25
Capítulo 3. CONTROL PREDICTIVO ADAPTATIVO APLICADO
A LOS SISTEMAS EN ESTUDIO ............................................................................
27
3.1 Control Predictivo adaptativo ...................................................................... 27
ÍNDICE
Reconocimiento

7
3.1.1 Identificación de mínimos cuadrados (error de predicción ARX
y error de salida OE) ..............................................................................
28
3.1.2 Identificación por Lotes ................................................................ 28
3.2 Aplicación de una Acción Integral .............................................................. 28
3.2.1 Identificación por mínimos cuadrados (error
de predicción) .............................................................................
29
3.2.2 Identificación por mínimos cuadrados (error
de salida) ....................................................................................
29
3.3 Resolución de la Ecuación Diofantina ........................................................ 29
3.4 Minimización de la Función de Costo .......................................... 30
CCCAAAPPPÍÍÍTTTUUULLLOOO 444... EEESSSTTTUUUDDDIIIOOO DDDEEELLL CCCOOOMMMPPPOOORRRTTTAAAMMMIIIEEENNNTTTOOO DDDEEE SSSIIISSSTTTEEEMMMAAASSS CCCOOONNN EEELLL CCCOOONNNTTTRRROOOLLL PPPRRREEEDDDIIICCCTTTIIIVVVOOO YYY PPPRRREEEDDDIIICCCTTTIIIVVVOOO AAADDDAAAPPPTTTAAATTTIIIVVVOOO ............... ......... ...... ......
32
4.1 Control Predictivo Adaptativo. Identificación por mínimos
cuadrados (error de predicción) .............................................................
34
4.2 Control Predictivo y Control Predictivo Adaptativo. Identificación
por mínimos cuadrados (error de salida) y ajuste del
factor de ponderación .............................................................................
40
4.3 Control Predictivo y Control Predictivo Adaptativo.
Identificación por Lotes .........................................................................
46
4.4 Comparación con el Control Predictivo y Control
Predictivo Adaptativo .............................................................................
51
Conclusiones ……………...……………………………………................................ 60
Recomendaciones ……………………………………………………........................ 62
Bibliografía ……………………………………………………………...................... 63
Anexos ……………………………………………………………………….............. 64
Anexo 1. Desarrollo de la función de costo ....................................................... 65
Reconocimiento

8
Anexo 2. Ecuaciones que definen el sistema. Aproximación de Euler ............. 66
Anexo 3. Condiciones iniciales del sistema ....................................................... 67
Anexo 4. Programa para Simular el Proceso del Tanque Mezclador,
Desarrollado en Matlab ...……………….......................................................
68
Anexo 5. Programa en MATLAB que permite obtener la
identificación del proceso (error de predicción) ................................................
69
Anexo 6. Programa en MATLAB que permite obtener la
identificación del proceso (error de salida).........................................................
70
Anexo 7. Cálculo de la ley de Control Predictivo, Desarrollado en
MATLAB (GPC) .......…...................................................................................
71
Anexo 8. Programa para Aplicar el Control Predictivo Adaptativo,
Desarrollado en Matlab (error de predicción) ...................................................
72
Anexo 9. Programa para Aplicar el Control Predictivo Adaptativo,
Desarrollado en Matlab (error de salida) ..........................................................
74
Anexo 10. Programa para Aplicar el Control Predictivo Adaptativo,
Desarrollado en Matlab (ajuste del factor de ponderación) .............................
75
Anexo 11. Diferenciación de Funciones de Traza con Respecto a Matrices .... 78
Reconocimiento

9
Capítulo 1.
Figura 1.1 Diagrama de Bloque o Estructura del Control Predictivo ........... 6
Figura 1.2 Estrategia de Control Predictivo .................................................. 9
Capítulo 2.
Figura 2.1 Proceso de mezcla del tanque ...................................................... 17
Figura 2.2 Respuesta del sistema para diferente variables medidas ............ 21
Figura 2.3 Respuesta del sistema & Respuesta identificada vs tiempo ........ 25
Figura 2.4 Respuesta del error para los dos métodos de identificación
de mínimos cuadrados .................................................................
26
Capítulo 3.
Figura 3.1 Esquema de Control Predictivo y Control Predictivo
Adaptativo ...................................................................................
31
Capítulo 4.
Comportamiento del Sistema con Control Predictivo Adaptativo
actualización del modelo en cada período de muestreo ....................................
32
Tabla 4.1 Ubicación de las figuras para los diferentes métodos ................ 32
4.1 Control Predictivo Adaptativo. Identificación por mínimos
cuadrados (error de predicción) .............................................................
34
ÍNDICE DE FIGURAS Y TABLAS
Reconocimiento

10
4.1.2 Figura 4.1 Variación de la Señal de Referencia ......................... 34
4.1.3 Figura 4.2 Variación de la Señal de Referencia ......................... 35
4.1.4 Figura 4.3 Variación del flujo de fluido caliente ....................... 36
4.1.5 Figura 4.4 Variación del horizonte de predicción y
factor de ponderación ................................................................
37
4.1.6 Figura 4.5 Variación del horizonte de predicción y
factor de ponderación .................................................................
38
Tabla 4. 2 Comportamiento del sistema ante diferentes cambios, con
la identificación por mínimos cuadrados (error de predicción) .............
39
4.2 Control predictivo y predictivo adaptativo. Identificación por mínimos
cuadrados (error de salida) y ajuste del factor de
ponderación.........................................................................................................
40
4.2.1 Figura 4.6 Variación de la señal de referencia .............................. 40
4.2.2 Figura 4.7 Variación del flujo de fluido caliente .......................... 41
4.2.3 Figura 4.8 Variación del flujo de fluido caliente .......................... 42
4.2.4 Figura 4.9 Variación del horizonte de predicción y
factor de ponderación ............................................................................. 43
4.2.5 Figura 4.10 Variación del horizonte de predicción y
factor de ponderación ............................................................................. 44
Tabla 4. 3 Comportamiento del sistema ante diferentes cambios, con la identificación por mínimos cuadrados (error de salida) .....................
45
Reconocimiento

11
4.3 Identificación por Lotes ............................................................................... 46
4.3.1 Figura 4.11 Variación de la señal de referencia ............................ 46
4.3.2 Figura 4.12 Variación del flujo de fluido caliente ........................ 47
4.3.4 Figura 4.13 Variación del flujo de fluido caliente ........................ 48
4.3.5 Figura 4.14 Variación del horizonte de predicción y
factor de ponderación ............................................................................. 49
Tabla 4. 3 Comportamiento del sistema ante diferentes cambios, con la identificación por lotes ....................................................................
50
4.4 Comparación Control Predictivo y Control Predictivo Adaptativo ...........
4.4.1 Identificación por mínimos (error predicción) ..............................
4.4.1.1 Figura 4.15 Variación de la señal de referencia .......................
51
51
51
4.4.1.2 Figura 4.16 Variación del flujo de fluido caliente .................... 52
4.4.1.3 Figura 4.17 Variación del horizonte de predicción y
factor de ponderación .............................................................................
53
4.4.2 Identificación por mínimos (error predicción) ..............................
4.4.2.1 Figura 4.18 Variación de la señal de referencia .......................
54
54
4.4.2.2 Figura 4.19 Variación del flujo de fluido caliente .................... 55
4.4.2.3 Figura 4.20 Variación del horizonte de predicción y
factor de ponderación .............................................................................
56
4.4.3 Identificación por Lotes ..................................................................... 57
4.4.3.1 Figura 4.21 Variación de la señal de referencia ....................... 57
4.4.3.2 Figura 4.22 Variación del flujo de fluido caliente .................... 58
4.4.4.3 Figura 4.23 Variación del horizonte de predicción y
factor de ponderación .............................................................................
59
Tabla 4. 4 Comportamiento del sistema ante diferentes cambios, con
la identificación por lotes .......................................................................
60
Reconocimiento

12
El Control Predictivo es una de las técnicas de control moderno más
potentes y quizás la que ha tenido más éxito en aplicaciones industriales. Las
principales razones del mismo se deben fundamentalmente a que: pueden ser
aplicadas a sistemas monovariables como multivariables; restricciones de las
variables de entradas y salida de la planta pueden ser consideradas en tiempo
real y además, por la filosofía utilizada para establecer la ley de control, puede
ser utilizado, para su implementación cualquier tipo de modelo: continuo o
discreto, lineal o no lineal; un punto muy importante es que puede ser usado
para controlar procesos con retardo importante. Esta última propiedad es la
principal motivación para este trabajo.
El control predictivo no es una estrategia de control específica, sino que trata
de un campo muy amplio de algoritmos de control desarrollados en torno a
unas ideas comunes como:
• uso de un modelo matemático del proceso para predecir la salida del
mismo en instantes futuros;
• cálculo de la acción de control a partir de la minimización de una
cierta función de costo;
• utilización de un horizonte de predicción deslizante, por lo que a
cada período de muestreo se desplaza el horizonte hacia adelante, se
aplica solamente la acción de control correspondiente al instante
presente para repetir el procedimiento.
El control predictivo generalizado (GPC), es un algoritmo de control
que utiliza de forma explicita un modelo dinámico del proceso, para calcular
las señales de control que lleve la salida del sistema al valor deseado en un
INTRODUCCIÓN
Reconocimiento

13
instante de tiempo futuro minimizando un criterio cuadrático. Corresponde por
consiguiente a la determinación de señales de control en lazo abierto, sin
embargo, se repite este cálculo cada cierto intervalo de tiempo tomando en
cuenta la salida muestreada del proceso. Este mecanismo hace que se obtenga
un control de lazo cerrado.
El control predictivo generalizado adaptativo consiste en actualizar el modelo
del proceso por identificación en cada período de muestreo y utilizar este
modelo para obtener la señal de control por GPC.
Este trabajo se encuentra estructurado en cuatro capítulos, dispuestos de la
siguiente manera:
El Capítulo I contiene el marco teórico en el cual se basa el Control
Predictivo Generalizado (GPC), se desarrollan los cálculos matemáticos que
suministran la ley de control.
En el Capítulo II se presenta el sistema físico considerado y los métodos de
identificación utilizados.
En el Capítulo III se detalla el procedimiento seguido para establecer la ley de
control predictivo adaptativo.
En el último Capítulo se analiza el comportamiento del sistema con el
algoritmo de control predictivo y control predictivo adaptativo por
simulación, considerando la respuestas del sistema ante variaciones de la
señal de referencia, del flujo de entrada caliente (perturbación), el horizonte de
predicción y el factor de ponderación.
Reconocimiento

14
• Sistema de Control Predictivo Adaptativo
Cota: *TJ 217
F4
DESCRIPTORES
Reconocimiento

II
Capítulo 1.
CONTROL PREDICTIVO GENERALIZADO (GPC):
1.1 Introducción. Es evidente que una forma de hacer frente a las exigencias crecientes de
calidad, competitividad, reducción de costos, seguridad, etc., se logra con la
mejora de los sistemas de control, lo que permite hacer frente a requerimientos
más estrictos[2]. En los trabajos realizados los últimos años el uso de modelos
para el control automático se acrecentó con el advenimiento de nuevas
técnicas para la identificación de sistemas. La idea de emplear un modelo en la
estructura del controlador hace posible que el control se lleve a cabo en
función de la evolución futura del proceso y no sólo su presente más
inmediato, como lo hace el control PID. El Control Predictivo Generalizado
(GPC), ha alcanzado un nivel muy significativo de aceptabilidad industrial en
aplicaciones prácticas de control de procesos.
Figura 1.1. Diagrama de Bloque o Estructura del Control Predictivo.
Reconocimiento

III
El control predictivo generalizado es un algoritmo que computa una
secuencia temporal discreta de las variables manipuladas con el fin de
optimizar el comportamiento futuro de la planta o proceso a controlar. El
algoritmo suministra una secuencia de valores de la señal de control a aplicar
en los instantes futuros de las cuales se extrae el valor correspondiente al
instante presente. En el siguiente instante de muestreo se repite el
procedimiento con valores actualizados de la salida y entrada del proceso.
Recordemos que el control clásico basa sus acciones en la diferencia
actual entre la salida y el valor deseado de las variables controladas, mientras
que el control predictivo utiliza un modelo para predecir la evolución del
proceso y así actuar en función del error que existirá en el futuro y no en el
instante presente.
Las principales características que comparten las diferentes estrategias
de control predictivo son:
1. Determinación de un modelo de predicción.
2. Definición de una función de costos.
3. Obtención de la ley mediante el procedimiento de un
horizonte huidizo.
Reconocimiento

IV
1.2 Filosofía del control predictivo
Utilizaremos la notación siguiente:
t : índice de tiempo discreto (t = 0, 1, 2, ...).
u(t): variable manipulada (VM) del proceso.
y(t): variable controlada (VC) del proceso.
w(t): señal de referencia o “setpoint”.
r(t): trayectoria de referencia.
u(t + k): los valores futuros de la señal de control, a aplicar en el
tiempo t+k, es decir {u(t | t), u(t + 1| t), ...}.
y(t + k | t): valores pronosticados futuros de la salida basados en:
a) Mediciones o conocimientos disponibles en el tiempo t de y(t) y
u(t) {y(t), y(t-1), ..., u(t-1), u(t-2), ...}.
b) Valores futuros de la entrada: {u(t), u(t + 1), ...} a aplicar.
La estrategia del control predictivo consta de los siguientes pasos:
1. Predicción de la salida y(t+k | t), es decir, predicción de la
salida al instante t+k, basándose en un modelo del proceso
y del conocimiento de las salidas y entradas al instante t.
2. Cálculo de las señales de control futuras optimizando un
cierto criterio J (incluyendo generalmente errores y
esfuerzo de control).
Reconocimiento

V
3. Envío de la señal calculada u(t) y avance del horizonte de
predicción (horizonte de predicción deslizante o huidizo).
figura 1.2. Estrategia de Control Predictivo.
La estructura básica del controlador está compuesta por los siguientes
elementos:
1. Modelo: capaz de representar la dinámica del proceso.
(Sencillo de usar y comprender).
2. Optimizador: da una solución a la optimización del criterio
seleccionado.
Reconocimiento

VI
1.3 Control Predictivo Generalizado:
El algoritmo de control predictivo generalizado consiste en la
aplicación de una secuencia de control que minimiza la función de costo dada
por[5,3]:
{ }2N1j
22N1Nj ])1jt(u)[j()]jt(w)tjt(y)[j(E)2N,1N(J −+ΔλΣ++−+δΣ= == | (1)
donde )tjt(y |+ es la predicción óptima en t+j de la salida del sistema
obtenido por la información disponible en t, E es la esperanza matemática, N1
y N2 son respectivamente los horizontes de predicción mínimos y máximos, N
es el horizonte de control, )j(δ y )j(λ son las secuencias de ponderación y
w(t+j) es la referencia al instante (t+j). El algoritmo del control predictivo
generalizado GPC es de dar la secuencia de los incrementos futuros de la
acción de control )t(uΔ , )1t(u +Δ ,... de manera de minimizar J.
Rescribiendo (1) en forma matricial se obtiene (ver anexo 1) :
( ){ } { }u)WY()WY(EN,1JEJ TT1 ΔΔλ+−−== (2)
y minimizando este índice respecto a uΔ , obtenemos:
]FYUW[G]IGG[u fft1t −ΓΔ−λ+=Δ − (3)
Reconocimiento

VII
donde:
)]1Nt(u),......,t(u[u u −+ΔΔ=Δ : incremento en las acciones de control.
T)]Nt(w),......,1t(w[W ++= : referencia futuras sobre el horizonte de
predicción.
Tj
fff )]nt(u),......,1t(u[U +Δ−Δ=Δ : acciones de control conocida,
anteriores al instante t .
Ta
fff )]nt(y),......,t(y[Y −= : salidas del proceso conocidas, anteriores
al instante t.
Γ,F,G : matrices cuyas filas contienen los
coeficientes de los polinomios calculados
recursivamente.
Teniendo en cuenta lo último podemos rescribir la ecuación (3) de
forma que obtengamos la siguiente expresión para el controlador :
)t(y)q(T)q(S)t(hw)t(uq
)q(T)q(R1 1
11
1
1
−
−−
−
−
−=Δ⎥⎦
⎥⎢⎣
⎢+ (4)
donde h es la suma de los coeficientes de la primera columna de
[ ] TT GIGGH λ+= si se considera w(t) constante sobre el horizonte de predicción
o un polinomio h(q-1) si las referencias futuras son diferentes, R(q-1) el
polinomio cuyos coeficientes son la primera fila de la matriz ΓHx y )q(S 1− es
el polinomio cuyos coeficientes son la primera fila de la matriz HxF .
Reconocimiento

VIII
1.4 Las predicciones óptimas con modelo Auto-regresivo y de
media móvil integrado (CARIMA)[5]:
Las predicciones óptimas se calculan utilizando un modelo CARIMA
dado por:
Δ
+−=−
−−−−
)q(D)t(e)q(T)1t(u)q(Bq)t(y)q(A 1
11d1 (5)
donde A(q-1), B(q-1), T(q-1), D(q-1) son polinomios en q-1, Δ= 1- q-1, d es
el retardo y e(t) es un ruido blanco. Estos polinomios están dados por:
naNA
11
1 qa............qa1)q(A −−− +++=
nbNB
11
1 qb............qb1)q(B −−− +++= nt
NT1
11 qt............qt1)q(T −−− +++=
ndNDqdqdqD −−− +++= ............1)( 1
11
donde na, nb, nt, nd son los ordenes de los polinomios A, B, T, D
respectivamente.
Los polinomios T(q-1) y D(q-1) representan las características estocásticas del
ruido. Debido a que éstos son difíciles de estimar en la práctica, es común que
se utilice T(q-1)=1 y D(q-1)=1 para el análisis del algoritmo básico de GPC
dado por la ecuación (6).
Δ
+−= −−−− )t(e)q(C)1t(u)q(Bq)t(y)q(A 11d1 (6)
Reconocimiento

IX
Con métodos de identificación es fácil obtener los polinomios A y B, y resulta
difícil en un proceso real obtener el polinomio C, ya que se asume un
polinomio T de orden nt, que se convertirá en un parámetro de diseño del
controlador gracias a su acción de filtraje de las perturbaciones.
1.5 Ecuación Diofantina: La determinación de la ley de control implica la resolución de una
ecuación polinomial llamada ecuación diofantina, definida de la siguiente
manera:
)q(Fq)q(E)q(A)q(T 1j
j1j
11 −−−−− +Δ= (7)
donde Ej y Fj son polinomios de ordenes (j - 1) y máx.(na, nt-1)
respectivamente. La ecuación anterior puede ser resuelta recursivamente para
los diferentes valores de j.
Si (6) se multiplica por Δ− )q(Eq 1j
j y sustituyendo en el polinomio T por
su valor en (7) tenemos que:
)jt()q(E)q(T)t(y)q(F)1jt(u)q(E)q(B)jt(y)q(T 1j
11j
1j
11 +ξ++−+Δ=+ −−−−−− t| (8)
Reconocimiento

X
Como )jt( +ξ es desconocido en el instante t y puesto que ξ se asume ruido
blanco de media nula, si consideramos el valor medio de la expresión anterior
(8), llegamos a la mejor predicción de la salida para el instante jt + a partir
del conocimiento de entradas y salidas al instante t:
)t(y)q(F)1jt(u)z(E)q(B)jt(y)q(T 1j
1j
11 −−−− +−+Δ=+ t | (9) considerando:
)q(E)q(B)q(G 1
j11
j−−− = , (10)
donde fy ,fu son las señales u e y filtradas por el polinomio T
respectivamente, podemos rescribir la ecuación (9) de un modo más
compacto como:
)t(y)q(F)1jt(u)q(G)jt(y f1f1
j j
−− +−+Δ=+ t| . (11)
Definiendo una nueva ecuación diofantina, la cual puede ser resuelta recursivamente:
)q(q)q(T)q(G)q(G 1j
j11j
1j
−−−−− Γ+′= , (12)
donde j y Γ′jG son polinomios con un número finito de elementos de órdenes
(j-1) y máx(nt-1,nb), respectivamente, y sustituyendo de nuevo en la
expresión (11) de la predicción obtenemos entonces :
)t(y)q(F)1t(u)q()1jt(u)q(G)tjt(y f1j
f1j
1j
−−− +−ΔΓ+−+Δ′=+ | . (13)
Reconocimiento

XI
Para cualquier j los valores de los dos últimos sumandos son conocidos
al instante t y en los instantes anteriores, y el primer sumando incluye las
acciones de control futuras a determinar (11).
El control predictivo adaptativo requiere la identificación en cada
instante de muestreo del modelo del proceso, la cual necesita a la vez las
entradas y salidas del proceso.
Reconocimiento

Capítulo 3.
27
Capítulo 2.
DESCRIPCIÓN DEL SISTEMA
2.0 Notación
W1(t): flujo de masa de la corriente caliente, en lbm/min.
W2(t): flujo de masa de la corriente fría, en lbm/min.
Cp: capacidad calórica del líquido a presión constante, en BTUlbm-ºF.
Cv3: capacidad calórica del líquido a volumen constante, en BTU/lbm-ºF.
T1(t): temperatura del flujo caliente, en ºF.
T2(t): temperatura del flujo frío, en ºF.
T3(t): temperatura del líquido dentro del tanque mezclador, en ºF.
t0(t): tiempo muerto o retraso debido al tiempo de transito en el tubo, en min.
T4(t): igual a T3(t) con retardo de t0(t), en ºF.
ρ: la densidad del contenido del tanque mezclador, en lbm/pies3
V: volumen del líquido, en pies3.
TO(t): señal del transmisor en una escala de 0 a 100%
Vp(t): posición de la válvula, entre 0 a 1.
u(t): salida del controlador, de 0 a 100%.
Cv: coeficiente del flujo de la válvula, en gpm/psi1/2.
Gf: gravedad específica, sin dimensión.
ΔPv: reducción de presión del flujo a través de la válvula, en psi.
τT: constante de tiempo del sensor de temperatura, en min.
τVp: constante de tiempo del actuador, en min.
Λ: sección transversal del tubo, en pies.
L: longitud del tubo, en pies.
Reconocimiento

Capítulo 3.
28
Los valores numéricos para este modelo se encuentran en Camacho & Smith. [2].
2.1 Modelo del Tanque Mezclador
El proceso considerado en este estudio es un tanque mezclador, el cual
se ilustra en la figura 2.1. El tanque recibe dos flujos, uno de fluido caliente
w1(t) y uno de fluido frío w2(t). La temperatura resultante de mezclar estas
dos corrientes es medida cierto tiempo después por un sensor para determinar
si la temperatura de la mezcla en el tanque es la deseada. Si no es así, se
realiza un control sobre el flujo frío de manera de alcanzar la temperatura que
se desea mantener en el tanque. Ejemplo: Intercambiador de una planta piloto
(cuando se extrae de el agua caliente de los posos petroleros y debe enfriarse
para obtener una temperatura deseada).
Figura 2.1 Proceso de mezcla del tanque Se hacen las siguientes suposiciones:
T3(t)
Reconocimiento

Capítulo 3.
29
• El volumen del líquido en el tanque se considera constante.
• La presión es constante.
• El contenido del tanque está bien mezclado.
• El tanque y el tubo están bien aislados.
Un modelo matemático del proceso corresponde a las siguientes ecuaciones
[2]:
• Balance de energía en el tanque mezclador:
dt)t(dTCV)t(TC))t(W)t(W()t(TC)t(W)t(TC)t(W 3
3v33p2122p211p1 ρ=+−+ (2.1)
• Retraso en la transportación o tiempo de retraso
)t(W)t(WL)t(t
210 +
ρΛ=
(2.2) (el retardo es variable ya que el flujo de liquido caliente y frío varia con el tiempo)
• Temperatura leída por el sensor:
))t(tt(T)t(T 034 −= (2.3)
• Temperatura suministrada por el transmisor:
))t(To)100)t(T((1dt
)t(dTo4
T
−−τ
= (2.4)
• Posición alcanzada por la válvula:
)))t(V)t(m(100
1(1dt
)t(dVp
pV
p −τ
= (2.5)
Reconocimiento

Capítulo 3.
30
• Ecuación de la válvula:
vfpv2 PG)t(VC60
500)t(W Δ= (2.6)
2.2 Construcción de un Modelo Discreto
Identificar un sistema consiste en encontrar un modelo matemático a
partir de experimentos u observaciones de entrada y salida del sistema. El
propósito es definir un modelo de manera que permita el estudio del sistema,
así como el diseño de controladores apropiados[5,3].
El modelo deberá representar solamente las propiedades esenciales de la
dinámica del sistema, de una manera sencilla y adecuada para su posterior
utilización.
Los modelos matemáticos obtenidos con estos métodos tienen los
propósitos siguientes:
• Ampliar el conocimiento sobre un proceso.
• Optimizar el comportamiento del proceso
• Predecir el comportamiento del sistema.
Reconocimiento

Capítulo 3.
31
Construcción de un Modelo Discreto para el Tanque Mezclador.
Luego de obtener las ecuaciones que describen el modelo dinámico
del sistema, se realiza un estudio de su comportamiento, mediante el uso
del paquete computacional MATLAB. Esto fue posible mediante el diseño
de un programa utilizando aproximación de Euler de las ecuaciones que
definen el sistema (anexo 2). El método de Euler permite obtener una
aproximación discreta con un período h.
Para la simulación del proceso se utilizaron una serie de entradas y
condiciones iniciales del sistema (anexo 3). El período h, es tomado para
obtener una buena aproximación del tiempo de retardo del sistema (anexo
4).
Señal de referenciaTo Vp T3 T4 W2
Modelo
Reconocimiento

Capítulo 3.
32
En las figuras se muestran las respuestas del proceso ante una entrada escalón (figura 2.7) que va de 27.8 a 22.8%...
Figura 2.1 Respuesta del Proceso para las diferentes variables medidas.
0 50 100 150 200 250 0.48
0.5
0.52
0.54
0.56 Figura a. Repuesta del sistema To
Tiempo(s)
Tem
pera
tura
ºf
0 50 100 150 200 2500.2
0.3
0.4
0.5Figura b. Posición de la Válvula Vp
Tem
pera
tura
ºf
Posi
ción
%
Tiempo(s)
0 50 100 150 200 250146
148
150
152
154
156
158
160 Figura c. Temperatura del tanque T3
0 50 150 250 146
150
154
158
Figura d. Temperatura del tanque con retardo T4 Te
mpe
ratu
ra ºf
Tem
pera
tura
ºf
20 60 100 140 180 90
100
110
120
130 Figura e. Flujo de fluido Frío W2
Tiempo(s)
20 60 100 140 180 0.22
0.24
0.26
0.28
Figura f. Señal de referencia
Fluj
o lb
m/m
in
Por
cent
aje
%
Tiempo(s)
Tiempo(s) Tiempo(s)
Reconocimiento

Capítulo 3.
33
De las graficas anteriores, se puede observar cómo el sistema responde
ante una entrada del flujo de fluido caliente (perturbación) constante de 150
lbm/min, la válvula se cierra mediante la entrada que varía de 45% a 30%
(figura b), el flujo de fluido frío pasa 111.2 a 91.2 lbm/min (figura e), la
temperatura del líquido en el tanque con retardo T4 varia de 151.2 a 159.2
ºF(figura d).
Los datos obtenidos de la respuesta del sistema y entrada fueron
guardados en unas variables, para luego ser utilizados en la identificación del
sistema con la utilización de la herramienta computacional Matlab.
2.3 Método de Identificación: Luego de obtener la respuesta del sistema y almacenar los datos en un archivo,
el paso siguiente es diseñar e implementar un programa que permita obtener
los parámetros del modelo matemático. La herramienta computacional
MATLAB, presenta un ambiente con el cual se logra integrar análisis
numérico, cálculos matriciales y procesamiento de señales, presentándolos en
una forma gráfica de fácil manejo.
Reconocimiento

Capítulo 3.
34
Entre las funciones de identificación contenidas en la caja de herramientas de
MATLAB se encuentra la función ARX, OE y RARX, ROE. Estas funciones
proporcionan un modelo discreto lineal auto-regresivo utilizando el método de
mínimos cuadrados para la estimación de los parámetros del modelo.
El modelo dado es de la forma:
)()()()()( 11 tenktuqBtyqA +−= −−
)()(1)( 11
1 nana qaqaqA −−− +++= L
)()()( 110
1 nbnb qbqbbqB −−− +++= L
donde:
y(t) es la respuesta del sistema en el tiempo t.
u(t-nk) es la entrada (t-nk) del sistema.
nk es el retardo en la entrada del sistema.
A(q-1) y B(q-1) son polinomios en q-1operador de retardo de
un período de muestreo.
El comando arx([y u],[na nb nk]), calcula el modelo recursivo donde [y u]
representa la salida y la entrada del sistema, [na nb nk] son los órdenes de los
polinomios A, B y el retardo del modelo que se desea obtener,
respectivamente.
Reconocimiento

Capítulo 3.
35
En forma explícita el modelo obtenido por arx y roe puede ser escrito como:
)1nbnkt(yb)1nkt(yb)nkt(yb)nat(ya)1t(ya)t(y nb21na1 +−−++−−+−=−++−+ LL
El comando roe([y u],[na nb nk] 'ff', gam, tho), suministra la estimación
recursiva para un modelo con error de salida, para este comando son
necesarios ‘ff ’, tipo de función a usar, ‘gam’ coeficiente de ajuste de los
parámetros.
El programa en MATLAB que permite obtener la identificación del proceso se
encuentra en los anexos 5 y 6. Luego de realizada la identificación del
proceso para un período de muestreo h, se obtuvieron los correspondientes
valores de los coeficientes de los polinomios A y B.
• Identificación por mínimos cuadrados (error de predicción) del sistema
con la función arx:
)dt(u)q(B)t(y)q(A 11 −= −−
)8t(u0825.0)4t(y1303.0)3t(y5147.0)2t(y0407.1)1t(y5524.1)t(y −−=−+−−−+−−
En el inicio de la simulación, la identificación será realizada con el comando
de MATLAB arx y para cada instante de muestreo, por un método de
estimación recursiva (función construida), ya que el método de estimación
recursiva que facilita la herramienta Matlab como lo es rarx, roe, presentaron
problemas en cuanto a la actualización del modelo.
Reconocimiento

Capítulo 3.
36
• Identificación por mínimos cuadrados (error de salida) del sistema con
la función oe:
)dt(u)q(B)t(y)q(A 11 −= −−
)8t(u0729.0)4t(y1498.0)3t(y5916.0)2t(y1947.1)1t(y6611.1)t(y −−=−+−−−+−−
La identificación será realizada con el comando de MATLAB oe y para
cada instante de muestreo, con el método recursivo de estimación (función
construida).
Al graficar la respuesta obtenida por identificación y la respuesta del proceso
se puede apreciar que el modelo obtenido por la función arx y oe de Matlab, se
aproxima bastante bien a la respuesta del sistema (figura 2.8). Tomando en
cuenta un criterio de validación sobre el error de salida y la desviación
estándar que presenta las funciones en la estimación de los parámetros del
polinomio.
0 20 40 60 80 100 120 1400
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
Tem
pera
tura
ºf
Figura 2.2 respuesta del sistema & respuesta identificada vs tiempo
Reconocimiento

Capítulo 3.
37
Respuesta del error entre el sistema y la respuesta obtenida por identificación
de mínimos cuadrados (error de predicción) y identificación de mínimos
cuadrados (error de salida) (figura 2.3-a).
Figura 2.3 Grafica del Error.
0 20 40 60 80 100 120 140-3
-2
-1
0
1
2
3
4 x 10 -4
Tiempo(s)
Figura a. Error de predicción & Error de salida vs tiempo
Tem
pera
tura
ºf
Reconocimiento

Capítulo 3.
38
Capítulo 3. CONTROL PREDICTIVO ADAPTATIVO APLICADO AL SISTEMA EN ESTUDIO.
Es un hecho bien conocido que la mayoría de los problemas de control de
nivel o temperatura se pueden resolver mediante simples reguladores PID. Sin
embargo, existen situaciones o casos (procesos con múltiples variables que
interactúan, retardos, dinámica compleja, etc.) o calidad del control exigida,
donde se requiere de técnicas de control más avanzadas. Estas aplicaciones
tienden a incrementarse debido a una serie de factores tales como: exigencias
crecientes de calidad, ahorro de energía, seguridad, etc.[5]
El Control Predictivo Generalizado puede considerarse como
una buena escogencia para el empleo de modelos dinámicos en la
determinación de una ley de control, mientras que el control adaptativo
permite que el sistema siga comportándose ante variaciones ambientales o
factores externos que afecten el proceso (perturbaciones). Parece interesante
utilizar y combinar las dos estrategias para obtener mejores resultados.
3.1 Control Predictivo Adaptativo.
El control predictivo adaptativo consiste en actualizar el modelo del
proceso por identificación en cada período de muestreo y utilizar este modelo
para obtener la señal de control por GPC.
Reconocimiento

Capítulo 4
33
3.1.1 Identificación de mínimos cuadrados (error de predicción y
error de salida).
En el inicio de la simulación las identificaciones son
realizadas con los comandos de Matlab arx y oeE
respectivamente, y para cada instante de muestreo, por un
método de estimación recursiva (función construida).
3.1.2 Identificación por lotes:
En lugar de actualizar los parámetros del modelo a partir
de la nueva información obtenida en cada período de
muestreo, se puede actualizar los parámetros cada cierto
intervalo de tiempo, tanto utilizando arx como oe.
También en lugar de utilizar un método recursivo de
identificación, se puede en cada instante de muestreo obtener
una estimación de los parámetros del modelo, utilizando un
lote de información más próximo al instante considerado por
medio de los comandos arx o oe (anexo 7).
Reconocimiento

Capítulo 4
34
3.2 Aplicación de una Acción Integral.
En el enfoque del Control Predictivo generalizado se adopta una ley
de control integral. Esta acción integral viene dada por el polinomio
[ ]1q1 −−=Δ de manera que el modelo del proceso, incluída la acción
integral, queda representado por:
)dt(u)q(B)t(y)q(A 11 −=Δ −−
3.2.1 Identificación por mínimos cuadrados ( error de
predicción):
(1-2.5524q-1+2.5931q-2– 1.5554q-3+ 0.645q-4–0.1303q-5)y(t) = -
0.0825q-8u(t-8)
3.2.2 Identificación por mínimos cuadrados ( error de salida):
(1-2.6611q-1+2.8558q-2 –1.7863q-3+ 0.7414q-4–0.1498q-5)y(t)= -
0.0729q-8u(t-8)
3.3 Resolución de la Ecuación Diofantina.
Se define entonces la siguiente Ecuación Diofantina:
)q(Fq)q(E)q(A1 1j
j1j
1 −−−− +Δ=
Donde )q(E 1j
− y )q(F 1j
− son polinomios de órdenes (j-1) y (na-1),
respectivamente. La ecuación anterior puede ser resuelta recursivamente
Reconocimiento

Capítulo 4
35
para los diferentes valores del horizonte de predicción, pero esto no es
indispensable.
Con la utilización del programa MATLAB y su facilidad en el
manejo y cómputo de matrices, utilizando el programa construido por Prof.
Dr. Dulhoste Jean C., incluido en el Anexo(8), obtenemos los valores de
las matrices G y F, donde )q(B)q(E)q(G 11j
1j
−−− = .
3.4 Minimización de la Función de Costo.
La función de Costo a minimizar está dada por
( ) )fw(GGGu~ T1T −Ιλ+=− , desarrollada en (3) del capítulo 1 y anexo 8.
Siendo G una matriz triangular baja de dimensión N1xN2, asumiendo que
N1 es igual al retardo del sistema y N2 el horizonte de predicción más el
tiempo muerto del sistema.
De las matrices construidas se extrae la información necesaria para la
determinación de la señal de control al instante t, u(t), escribiéndola de la
forma:
F(q-1)u(t) = - G(q-1)y(t) + Kw(t)
Y se construyen los polinomios F, G, K cuyos coeficientes corresponden a
los componentes de la matriz K y F.
Luego en el instante siguiente, y aprovechando las nuevas informaciones de
la salida y de la entrada del sistema, se actualizan los parámetros del
modelo F, G y K de las acciones de control.
Reconocimiento

Capítulo 4
36
3.5 Esquema de Control Predictivo y Control Predictivo Adaptativo.
Figura 3.1 Esquema para el Control Predictivo y Control Predictivo Adaptativo.
En el diagrama anterior se muestra el procedimiento a seguir para la
aplicación del control predictivo y control predictivo adaptativo; aquí es
necesario decir que estos procedimientos deben ser aplicados en cada
período de muestreo.
Obtención del Modelo de Proceso.
Construcción de la Ecuación Diofantina.
Resolución de la Ecuación Polinomial.
Minimización de la Función de Costo.
Aplicación de la Señal de Control Control
Control Predictivo
Reconocimiento

Capítulo 4
37
Utilizando los datos obtenidos al ejecutar el GPC construido por Prof. Dr.
Dulhoste Jean C., desarrollado en Matlab (Anexo 8), se obtienen los
valores de G, F y K para determinados horizontes de predicción. Para el
estudio del comportamiento del controlador, se efectuaron variaciones en la
señal de referencia, flujo de fluido caliente (perturbación) y horizonte de
predicción y el factor de ponderación del modelo. Seguidamente se
analizarán las respuestas del sistema ante estas modificaciones.
Con el algoritmo control predictivo se pueden modificar de forma muy
sencilla los parámetros de entonación de la ley de control, horizonte de
predicción y factor de ponderación.
Reconocimiento

Capítulo 4
38
CCCAAAPPPÍÍÍTTTUUULLLOOO 444...
EEESSSTTTUUUDDDIIIOOO DDDEEELLL CCCOOOMMMPPPOOORRRTTTAAAMMMIIIEEENNNTTTOOO DDDEEE SSSIIISSSTTTEEEMMMAAASSS CCCOOONNN EEELLL CCCOOONNNTTTRRROOOLLL PPPRRREEEDDDIIICCCTTTIIIVVVOOO YYY PPPRRREEEDDDIIICCCTTTIIIVVVOOO AAADDDAAAPPPTTTAAATTTIIIVVVOOO...
Se analizó el comportamiento del sistema controlado por el control
predictivo y predictivo adaptativo. Para ello se modificó:
• El valor de la señal de referencia;
• El Flujo de fluido caliente (perturbación);
• La influencia del horizonte de predicción y el factor de
ponderación sobre el desempeño del control.
La siguiente tabla ilustra la ubicación de la figuras para los diferentes
métodos de identificación para el control predictivo adaptativo
(actualización del modelo en cada período de muestreo).
Reconocimiento

Capítulo 4
39
Referencia Flujo de Entrada Horizonte predicción / % (caliente) lbm/min Factor ponderación
Pagina Figuras Variación Variación Constante Variación Constante4.1 Identificación de mínimos 34 4,1 -10 hasta 5 150 10 / 30 cuadrados (error prediccón) 35 4,2 +/-14 150 10 / 30
36 4,3 -10 hasta 5 160 hasta 140 10 / 30 37 4,4 -10 hasta 5 150 12 / 20 38 4,5 +/-18 150 15 / 100
4.2 Identificación por mínimos 40 4,6 -15 hasta 9 150 10 / 8-60 cuadrados (error salida), 41 4,7 +/-10 160 hasta 150 10 / 8-60 ajuste factor ponderación 42 4,8 +/-10 160 hasta 145 10 / 8-60
43 4,9 +/-10 150 12 / 5-10 44 4,10 +/-10 15 / 15 - 80
4.3 Identificación por Lotes 46 4,11 +/-5 150 5 / 14 47 4,12 +/-5 100 hasta 250 5 / 14 48 4,13 +/-5 200 hasta 110 5 / 14 49 4,14 +/-5 200 hasta 110 10 / 25
4,4 Comparación Control 51 4,15 -10 hasta 5 150 10 / 30 Predictivo y Control Predictivo 52 4,16 160 hasta 140 10 / 30 Adaptativo 53 4,17 -10 hasta 5 150 5/20
54 4,18 +/-20 150 10/8-6055 4,19 +/-10 160 hasta150 10/-6056 4,20 +/-10 150 15/15-8057 4,21 -9 hasta 15 150 5/1458 4,22 +/-5 100 hasta 250 5/1459 4,23 +/-5 200 hasta110 10/25
Reconocimiento

Capítulo 4
40
4.1 Control Predictivo Adaptativo. Identificación por mínimos cuadrados (error de predicción): 4.1.1 Variación de la Señal de Referencia: en la figura f, Se puede observar que el sistema logra estabilizarse al valor de referencia (figura a) alcanzando la válvula posiciones de 45% a 21.6% (figura b), disminuyendo el flujo de fluido frío 180.20 a 86.5lbm/min (figura d), para alcanzar una temperatura del tanque de 131.26 y 161.26 ºF (figura c ).
Figura 4.1 Variación de la Señal de Referencia.
0 50 150 250 300-0.1
-0.08
-0.06 -0.04
-0.02
0
0.02
0.04
0.06 Figura a. Respuesta del Sistema To
Tiempo(s)
0 100 200 3000.2
0.25
0.35
0.45
0.5Figura b. Posición de Válvula Vp
Tiempo(s)
0 50 150 250 350130
140
150
160
Figura c. Temperatura en el Tanque Mezclador T4
Tiempo(s)
0 100 200 30080
100
140
180
200Figura d. Flujo de Agua Fría W2
Tiempo(s)
0 100 200 300-0.1
-0.06
-0.02
0.02
0.06Figura f. Señal de Referencia
Tiempo(s)
Tem
pera
tura
ºF
Pos
ici {o
n %
0 50 150 250 3000.2
0.25
0.35
0.45
0.5 Figura e. Señal de Control
Tem
pera
tura
ºF
Flu j
o lb
m/m
inPo
rcen
taje
%
Reconocimiento

Capítulo 4
36
4.1.2 Variación de la señal de referencia en +/-14% (figura f),la respuesta presenta mayores oscilaciones que en el caso anterior, aumentando la abertura de la válvula de 54.7% a 13.5% (figura b), así regulando el flujo de fluido frío desde 218.9 hasta 53.9lbm/min (figura d), obteniendo una temperatura del tanque de 180ºF (figura c).
Figura 4.2 Variación de la Señal de Referencia.
0 50 150 250 300-0.15 -0.1
0
0.1 0.15
0.25
Figura a. Respuesta del Sistema To
Tiempo(s)
0 100 200 3000
0.1
0.2
0.3
0.4
0.5
0.6
0.7Figura b. Posición de Válvula Vp
Tiempo(s)
Pos
icio
0 100 200 300 120
140
160
180
200
Figura c. Temperatura con retardo T4
Tiempo(s)
0 100 200 3000
0.1
0.3
0.5
0.7 Figura e. Señal de Control
0 100 200 300
-0.14
-0.05
0.05
0.14Figura f. Señal de Referencia
Tiempo(s)
Tem
pera
tura
ºF
Pos
ició
n %
0 100 200 300 0
50
100
150
200
250Figura d. Flujo de Fluido Frío W2
Tiempo(s)
Fluj
o lb
m/m
Tem
pera
tura
ºF
Porc
enta
je %
Reconocimiento

4.1.3 Variación del flujo de fluido caliente de 160 a 140 lbm/mi:(figura f) el sistema logra estabilizarse ante la variación del flujo de fluido caliente (perturbación) (figura f) en un tiempo corto (figura a), siguiendo la referencia -10% a 5%, cerrándose la válvula entre 41.8% a 20% (figura b), para disminuir el flujo de fluido frío en 167.5 a 80.73lbm/min (figura d), para una temperatura de 131.4 y 162.26 ºF (figura c).
0 100 200 3000.2
0.25
0.3
0.35
0.4
0.45 Posición de Válvula
Tiempo(s)
Pos
icio
n %
0 100 200 300 130
140
150
160
Temperatura en el Tanque Mezclador T4
Tiempo(s)
Tem
pera
tura
°f
0 100 200 30080
100
120
140
160
Flujo de Agua Fría W2
Tiempo(s)
Fluj
o lb
m/m
in
0 100 200 3000.2
0.25
0.3
0.35
0.4
0.45 Señal de Control
0 50 100 150 200 140
144
148
152
156
160
Tiempo(s)
Cambio de flujo de Entrada W1
0 50 100 150 200 250 300-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Tiempo(s)
Respuesta del Sistema To
Tem
pera
tura
°F
Reconocimiento

Capítulo 4
39
Figura 4.3 Variación del flujo de fluido caliente... 4.1.4 Ajuste del horizonte de predicción y factor de ponderación: de 12 períodos de muestreo y un factor de 20 respectivamente; se observa la respuesta del sistema con un flujo de fluido caliente constante de 150 lbm/min. Al introducirle un valor de la señal de referencia de –10% a 5%(figura f), el sistema responde rápidamente (figura a).
0 100 200 300-0.1 -0.08
-0.04
0
0.04
0.08 Figura a. Respuesta del Sistema To
Tiempo(s)
Tem
pera
tura
0 100 200 300
0.2
0.25
0.3
0.35
0.4
0.45
Figura b. Posición de Válvula Vp
Tiempo(s) P
osic
ion
0 100 200 300 130
140
150
160
170 Figura c. Temperatura con retardo T4
Tiempo(s)
Tem
pera
tura
0 100 200 30060
100
140
180
Figura d. Flujo de fluido Frío W2
Tiempo(s)
Fluj
o lb
m/
0 100 200 300
0.2
0.3
0.4
0.5 Figura e. Señal de Control
0 100 200 300-0.1 -0.08
-0.04
0
0.04
Figura f. Señal de Referencia
Tiempo(s)
Tem
pera
tura
Reconocimiento

Capítulo 4
40
Figura 4.4 Variación del horizonte de predicción y factor de ponderación.
4.1.5 Ajuste del horizonte de predicción y factor de ponderación: de 15 períodos de muestreo y un factor de 100, respectivamente, para variaciones de la señal de referencia de +/-18% (figura f), se observa la mejora en cuanto a la posición de la válvula de control (figura b).
0 100 200 300 -0.2
-0.1
0
0.1
0.2
Figura a. Respuesta del Sistema To
Tiempo(s)
0 100 200 300
0.1
0.3
0.5
0.7Figura b. Posición de Válvula Vp
Tiempo(s)
0 100 200 300 110
130
150
170
190
Figura c. Temperatura con retardo T4
Tiempo(s)
0 100 200 300
50
150
250
Figura d. Flujo de Agua Fría W2
Tiempo(s)
0 100 200 300
0.1
0.3
0.5
0.7 Figura e. Señal de Control
0 100 200 300 -0.2
-0.1
0
0.1
0.2Figura f. Señal de Referencia
Tiempo(s)
Tem
pera
tura
ºF
Pos
ició
n %
Tem
pera
tura
ºF
Flu j
o lb
m/m
inTe
mpe
ratu
ra ºF
Reconocimiento

Capítulo 4
41
Figura 4.5 Variación del horizonte de predicción y factor de ponderación. Estudio del sistema controlado ante diferentes cambios
Señal de referencia
Variación
Perturbación
Constante 150lbm/min
Horizonte de predicción y factor de ponderación.
Constante 10 y 30 Para este método el Rango de la señal de referencia es de +/-1% a +/-14 %. Para valores mayores que +/-14% el sistema se satura. Los cambios que se efectuaron son de –10% a 5%, +/-14% y +/-18.
El sistema se estabiliza en un tiempo corto respondiendo al cambio de señal.
Para valores mayores o igual a +/-10% el sistema tiende a presentar muchas oscilaciones. Al introducir una señal de referencia pequeña el sistema se estabiliza más rápido.
Perturbación
Variación
Señal de referencia
Constante
Horizonte de predicción y factor de ponderación.
Constante 10 y 30
El rango del flujo de fluido caliente es de 135 a 170lbm/min para este método. La variación que se realizó fue de 160 a 140 lbm/min.
El sistema se hace muy lento no siguiendo la referencia adecuadamente (figura 4.3-a). Para valores del flujo de fluido de entrada (perturbación) de 160 a 140lbm/min.
Si se aumentara el factor de ponderación el sistema respondería mas rápido y así se mejoraría la respuesta.
Horizonte de predicción y factor de ponderación.
Variación
Perturbación
Constante 150lbm/min
Señal de referencia
Constante
Reconocimiento

Capítulo 4
42
El rango del horizonte de predicción y el factor de ponderación pueden variar dependiendo de la señal de control. Si el factor de ponderación es grande el sistema responde muy lento a la referencia (figura 4.5-a), sus cambios fueron 12 a 20, 15 a 100, 10 a 30, respectivamente.
Para valores de referencia pequeños el sistema logra estabilizarse en un tiempo muy corto (figura 4.1-a). Si aumentamos el factor de ponderación y el horizonte de predicción el sistema puede responder adecuadamente (figura 4.2).
Tabla 4.2 Comportamiento del sistema ante diferentes cambios, con la identificación por mínimos cuadrados (error de predicción)
4.2 Control Predictivo Adaptativo. Identificación por mínimos cuadrados (error de salida) y ajuste del factor de ponderación: 4.2.1 Respuesta ante la variación de la señal de referencia de –15% a 9% (figura f), con el uso del control predictivo adaptativo el sistema responde a dicha señal en un tiempo muy corto (figura a), ubicándose la temperatura del tanque en 169.26ºF(figura c), obteniendo la válvula en una posición de 57.6% hasta 17.4% (figura b), para un flujo de fluido frío de 230 y 70lbm/min (figura d).
0 50 150 250 350 45-0.15
-0.1
-0.05
0
0.05
0.1 Figura a. Respuesta del Sistema To
Tiempo(s)
Tem
pera
tura
0 100 500
0.2
0.3
0.4
0.5
0.6
Figura b. Posición de Válvula Vp
300 Tiempo(s)
Reconocimiento

Capítulo 4
43
. Figura 4.6 Variación de la Señal de Referencia.
4.2.2 Variación del flujo de fluido caliente(perturbación) 160 a 150lbm/min: el sistema responde a la señal referencia en un tiempo muy corto (figura a), la posición de la válvula pasa de 45% a 16% (figura b), disminuyendo el flujo de fluido frío de 180.2 a 60lbm/min (figura d), para mantenerse la temperatura en 131.2 y 171ºF (figura c).
0 50 150 250 350 45
80
120
160
200
240Figura d. Flujo de Agua Fría W2
Tiempo(s)
Fluj
olb
m/m
0 50 150 25 350 450 0.15
0.25
0.35
0.45
0.55
0.65 Figura e. Señal de Control
50 150 250 350 450 -0.1
-0.05
0
0.05
0.1
0.15 Figura a. Respuesta del Sistema To
Tiempo(s)
Tem
pera
tu
0 100 300 500 130
140
150
160
170
Figura c. Temperatura con retardo T4
Tem
pera
tu
Tiempo(s)
0 100 300 500
0.25
0.35
0.45
Figura b. Posición de Válvula Vp
Tiempo(s)
0 50 150 250 350 45060
100
140
180
Figura d. Flujo de Agua Fría W2
Tiempo(s)
Fluj
olb
m/m
Pos
ició
n %
Pos
ició
n%
0 100 200 300 400 500 600 120
130
140
150
160
170 Figura c. Temperatura con retardo T4
Tiempo(s)
Tem
pera
tur
50 150 200 300 -0.15
-0.1
-0.05
0
0.05
0.1Figura f. Señal de Referencia
Tiempo(s)
Reconocimiento

Capítulo 4
44
Figura 4.7 Variación del flujo de fluido caliente. 4.2.3 Respuesta ante una variación del flujo de fluido caliente de 160 a 145lbm/min (figura f): el sistema logra responder ante el cambio de flujo en un tiempo corto (figura a), disminuyendo el flujo de fluido frío en 174 a 63.8lbm/min (figura d), cerrando la válvula en una posición 43.5% a 15.9% (figura b).
Figura 4.8 Variación del flujo de fluido caliente
0 50 150 250 350 4500.15
0.25
0.35
0.45
Figura e. Señal de Control
0 100 300 500
0.2
0.3
0.4
0.5Figura b. Posición de Válvula Vp
Tiempo(s)
0 200 400 600
130
140
150
160
170
Figura c. Temperatura con retardo T4
Tiempo(s)
Tem
pera
tura
50 150 250 350 450 0.15
0.25
0 .35
0.45
Figura e. Señal de Control
Pos
ició
n %
0 50 100 150 200 250 300 350 400 450 50060
80
100
120
140
160
180
200Figura d. Flujo de Agua Fría W2
Tiempo(s)
Fluj
o lb
m/m
in
0 40 80 120 150
152
154
156
158
160
Tiempo(s)
Figura f. Cambio de flujo de Entrada W1
Fluj
o lb
m/m
in
0 50 150 250 300
-0.13 -0.1
0
0.1
0.15 Figura a. Respuesta del Sistema To y la referencia
Tiempo(s)
0 40 80 120 145
150
155
160
Tiempo(s)
Figura f. Cambio de flujo de Entrada
Reconocimiento

Capítulo 4
45
4.2.4 Variación del factor de ponderación desde 5 a 15 con un horizonte de predicción de 12 períodos de muestreo: según el punto de operación el sistema responde muy rápido (figura a), para obtener una posición de la válvula adecuada (figura b),para así disminuir el flujo de fluido frío a 66lbm/min (figura d), logrando una temperatura máxima en el tanque de 171.26ºF (figura c).
0 50 150 250 350 450 -0.1
-0.05
0
0.05
0.1
0.15 Figura a. Respuesta del Sistema To
Tiempo(s)
Tem
pera
tu
0 100 300 500 0.05
0.15
0.25
0.35
0.45
Figura b. Posición de Válvula Vp
Pos
icio
n
Tiempo(s)
0 200 400 600 130
150
170
190 Figura c. Temperatura con retardo T4
Tem
pera
tu
Tiempo(s)
0 50 150 250 350 45020
60
100
160
200Figura d. Flujo de Agua Fría W2
Fluj
olb
m/
Tiempo(s)
Reconocimiento

Capítulo 4
46
Figura 4.9 Variación del horizonte de predicción y factor de ponderación.
4.2.5 Ajuste del factor de ponderación 15 a 80 y horizonte de predicción 15: hace que el sistema responda más rápido (figura a), alcanzando la válvula una abertura mínima de 16.5% (figura b), para disminuir el flujo de fluido frío a 66.06lbm/min (figura d), manteniendo en un máximo la temperatura del tanque en 174.26ºF (figura c).
0 50 150 250 350 450 -0.1
-0.05
0
0.05
0.1
0.15 Figura a. Respuesta del Sistema To
Tiempo(s)
Tem
pera
tura
0 100 300 500
0.25
0.35
0.45
Figura b. Posición de Válvula Vp
Tiempo(s)
Pos
ició
n%
0 50 150 250 350 45060
100
140
180
Figura d. Flujo de Agua Fría W2
Tiempo(s)
Fluj
o lb
m/m
in
Reconocimiento

Capítulo 4
47
Figura 4.10 Variación del horizonte de predicción y factor de ponderación
Estudio del sistema controlado ante diferentes cambios
Señal de referencia
Variación
Flujo de entrada (perturbación)
Constante150lbm/min
Horizonte de predicción y factor de ponderación. Constante 10 y 8,60 resp
El intervalo de la señal de referencia para este proceso de identificación (error de la salida), es de +/1% a +/-25% y las variaciones que se realizaron son de 9%, +/-10 y -15%.
El sistema responde ante el flujo de entrada caliente (figura 4.6-e).
Los valores de los parámetros del control son adecuados ya que éstos se obtienen al tanteo.
Flujo de entrada (perturbación)
Variación
Señal de referencia
Constante
Horizonte de predicción y factor de ponderación.
Constante
0 200 400 600 130
140
150
160
170
Figura c. Temperatura con retardo T4Te
mpe
ratu
ra
Tiempo(s)
0 50 150 250 350 450 0.15
0.25
0.35
0.45
Figura e. Señal de Control
Reconocimiento

Capítulo 4
48
El rango del flujo de fluido caliente (perturbación) es de 145 a 160lbm/min y se utilizó un valor de 160 a 150lbm/min y su rango mayor (figura 4.7-f).
El sistema responde a la referencia ante el cambio de flujo de entrada para referencia de +/-10% (figura 4.7-a), no presentando inestabilidad.
Si se aumentara el horizonte de predicción el sistema respondería más rápido y así se mejoraría la respuesta (figura 4.8-a). Los valores que se utilizaron 10 y de 8 a 60 respectivamente.
Horizonte de predicción y factor de ponderación.
Variación
Flujo de entrada (perturbación)
Constante 150lbm/min
Señal de referencia
Constante
El rango del horizonte de predicción para que no presente tantas oscilaciones para una buena respuesta es menor de 20 y un factor mayor de 30. El factor de ponderación puede variar de 2 a 80 ya que dicho factor muy grande el sistema responde bruscamente buscando la referencia.
El sistema responde a la referencia presentando oscilaciones ya que el horizonte de predicción es mayor que el factor de ponderación (figura 4.9-a).
Tabla 4.3 Comportamiento del sistema ante diferentes cambios, con la identificación por mínimos cuadrados (error de salida)
4.3 Control predictivo adaptativo. Identificación por Lotes.
4.3.1 Respuesta ante una señal de referencia de +/-5% (figura f), el sistema responde adecuadamente ante la señal de entrada (figura a), ubicándose la temperatura máxima del tanque en 161.2ºF (figura c), con un flujo de fluido frío mínimo 86.5lbm/min (figura d), cerrando la válvula en 35% a 21% (figura b).
Reconocimiento

Capítulo 4
49
4.11 Variación de la Señal de Referencia.
0 50 150 250 350 450-0.06
-0.02
0
0.02
0.06 Figura a. Respuesta del Sistema To
Tiempo(s)
Tem
pera
tura
0 100 300 500
0.22
0.26
0.3
0.34
Figura b. Posición de Válvula Vp
Pos
ició
Tiempo(s)
0 100 300 500 140
145
150
155
160
165 Figura c. Temperatura con retardo T4
Tiempo(s
Tem
pera
tura
ºf
0 50 150 250 350 450
90
110
130
150Figura d. Flujo de Agua Fría W2
Fluj
olb
m/m
i
Tiempo(s)
0 50 150 250 350 450 0.2
0.24
0.28
0.32
0.36 Figura e. Señal de Control
0 50 150 250 350 45-0.05
-0.03
-0.01
0.01
0.03
0.05Figura f. Señal de Referencia
Tiempo(s)
Por
cent
aje
%
Reconocimiento

Capítulo 4
50
4.3.2 Variación del flujo de fluido caliente que va de 100 a 250lbm/min: el sistema responde ante el cambio de flujo volviendo a la señal de referencia de +/-5% en un tiempo corto (figura a), abriendo la válvula en 23% a 36% (figura b), aumentando el flujo de fluido frío en 94.5 a 144.1lbm/min (figura d).
Tem
pera
tura
ºF
0 200 400 6000.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55Figura b. Posición de Válvula Vp
Tiempo(s) P
osic
ión
0 200 400 600 130
140
150
160
170
Temperatura en el Tanque Mezclador T4
Tiempo(s)
Tem
pera
tura
ºF
0 100 200 300 400 500
100
140
180
220Flujo de Agua Fría W2
Tiempo(s)
Fluj
o lb
m/m
in
0 100 200 300 400 500100
150
200
250
Tiempo(s)
Fluj
o lb
m/m
in
Cambio de flujo de Entrada
0 100 200 300 400 500-0.1
-0.05
0
0.05
0.1
0.15 Figura a. Respuesta del Sistema To y señal de referencia
Tiempo(s)
Reconocimiento

Capítulo 4
51
Figura 4.12 Variación del Flujo Caliente.
4.3.3 Variación de la entrada de fluido: al disminuir la entrada del flujo de fluido caliente (perturbación) en 200 a 110lbm/min (figura e). Con señal de referencia de +/-5%, el sistema se desestabiliza logrando estabilizarse en un tiempo corto (figura a), cerrándose a un mínimo la válvula en 15.8% (figura b), para disminuir el flujo de fluido frío en un mínimo 63.5lbm/min (figura d), alcanzando una temperatura del tanque que va de 141.2 a 161.2ºf (figura c).
.
0 100 200 300 400 500
0.25
0.35
0.45
0.55 Señal de Control
Tem
pera
tura
ºF
0 100 200 300 400 500
0.2
0.3
0.4
0.5Figura b. Posición de Válvula Vp
Tiempo(s
Pos
ició
n
0 200 400 600
120
130
140
150
160
Figura c. Temperatura con el retardo T4
Tiempo(s
Tem
pera
tura
ºF
0 100 200 300 400 50060
100
140
180
Figura d. Flujo de Agua Fría W2
Tiempo(s
Fluj
o lb
m/m
in
0 100 200 300 400 500
-0.15
-0.05
0
0.05
0.15
Figura a. Respuesta del Sistema To y señal de referencia
Tiempo(s)
Reconocimiento

Capítulo 4
52
Figura 4.13 Variación del fluido de entrada.
4.3.4 Variaciones del horizonte de predicción y factor de ponderación: Ante dichas variaciones que son 10 períodos de muestreo y un factor de 25, respectivamente, el sistema responde más rápido (figura a) a la señal de referencia, conjunto con estos cambios la válvula se mantiene en un mínimo de 15.8% (figura b), al igual que el flujo de fluido frío en 63.5lbm/min (figura d) para una temperatura de 141.2 a 161.2ºf (figura c).
. Figura 4.14 Variación del horizonte de predicción y factor de ponderación.
0 100 200 300 400 500 0.15
0.25
0.35
0.45
Figura e. Señal de Control
0 100 200 300 400 500
-0.15
-0.05
0
0.05
0.15 Figura a. Respuesta del Sistema To
Tiempo(s
Tem
pera
tura
ºF
0 100 200 300 400 5000.1
0.15
0.25
0.35
0.45
Figura b. Posición de Válvula Vp
Tiempo(s)
Pos
ició
n
0 100 200 300 400 50050
100
150
200Figura d. Flujo de Agua Fría W2
Tiempo(s
0 200 400 600
125
135
145
155
165
Figura c. Temperatura con retardo T4
Tiempo(s
0 100 200 300 400 500
0.15
0.25
0.35
0.45
Figura e. Señal de Control
0 100 200 300 400 500
110 120
130 140
150 160
170 180
190
200
Tiempo(s)
Figura f. Cambio de flujo de Entrada W1
Fjuj
o lb
m/m
inFj
ujo
lbm
/min
Tem
pera
tura
°F
Pos
ici{o
n %
Reconocimiento

Capítulo 4
53
Estudio del sistema controlado ante diferentes cambios
Señal de referencia
Variación
Perturbación
Constante150lbm/min
Horizonte de predicción y factor de ponderación. Constante 5 a 14 resp.
El intervalo de la señal de referencia para este proceso de identificación (error de la salida), es de +/-1% a +/-25%
El sistema responde muy bien para el control adaptativo (figura 4.11-e).
Perturbación
Variación
Señal de referencia
Constante
Horizonte de predicción y factor de ponderación. Constante 5 a 14 resp
El rango del flujo de fluido caliente (perturbación) es de 90 a 250lbm/min, es el de mayor intervalo de perturbación entre métodos.
El sistema responde muy bruscamente en presencia de la perturbación logrando estabilizarse, y siguiendo a la referencia (figura 4.12,4--a).
Los valores del horizonte de predicción y factor de ponderación son pequeños. No obstante, el sistema responde adecuadamente.
Horizonte de predicción y factor de ponderación.
Variación
Perturbación
Constante 150lbm/min
Señal de referencia
Constante
Si se aumenta mucho el factor de ponderación acorde al horizonte de predicción el sistema mejora su respuesta, de no ser así el sistema puede responder bruscamente a la referencia.
El sistema mejora su respuesta pero presenta oscilaciones (figura 4.14-a), para el control predictivo adaptativo, estabilizándose en un período mas corto.
La respuesta del sistema podría ser más rápida o más lenta dependiendo de estos cambios.
Tabla 4.4 Comportamiento del sistema ante diferentes cambios, con la identificación por lotes
Reconocimiento

Capítulo 4
54
4.4 Comparación de la Respuesta del Sistema con Control Predictivo
y Control Predictivo Adaptativo.
4.4.1 Identificación de mínimos cuadrados (error de predicción):
4.4.1.1 Respuesta ante la variación de la señal de referencia +/-10% a 5%(figura a),con un flujo de entrada (perturbación) de 150 lbm/min y horizonte de predicción de 10 períodos por muestreo y factor de ponderación 30. Se observa que el control predictivo adaptativo responde mas rápido que el control predictivo el cual presenta una mayor
oscilación .
0 50 100 150 200 250 300 -0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08 Figura a. Respuesta del Sistema To
Tiempo(s)
Control Predictivo Adaptativo
Control Predictivo
0 50 100 150 200 250 300 350 0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5 Figura b. Posición de Válvula Vp
Tiempo(s) 0 50 100 150 200 250 300
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Figura b. Señal de Referencia
Tiempo(s)
Tem
pera
tura
°F
Pos
ici {o
n %
Por
cent
aje
%
Reconocimiento

Capítulo 4
55
Figura 4.15 Variación de la señal de referencia.
4.4.1.2 Respuesta ante la variación de flujo de entrada (perturbación) que va de 160 a 140 lbm/min (figura b),con señal de referencia de –10% a 5%. El control predictivo adaptativo responde mejor ante dicha variación de fluido (figura a).
0 50 100 150 200 250 300
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06 Figura a. Respuesta del Sistema To
Tiempo(s)
Control Predictivo Adaptativo
Control Predictivo
Tem
pera
tura
°F
0 20 40 60 80 100 120 135
140
145
150
155
160
165
Tiempo(s)
Figura b. Cambio de Flujo de Entrada W1
Reconocimiento

Capítulo 4
56
Figuras 4.16 Variaciones del flujo de entrada. 4.4.1.3 Variación del horizonte de predicción y factor de ponderación de 5 y 20 respectivamente, con un flujo de entrada constante de 150lbm/min, respondiendo el sistema en un tiempo más rápido con el control predictivo adaptativo (figura a).
0 50 100 150 200 250 300-0.1
-0.08 -0.06 -0.04 -0.02
0 0.02 0.04 0.06 0.08
Figura a. Respuesta del Sistema To
Tiempo(s)
Control Predictivo Adaptativo
Control Predictivo
Tem
pera
tura
°F
0 50 100 150 200 250 300 350 0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5 Figura b. Posición de Válvula Vp
Tiempo(s)
Control Predictivo Adaptativo
Control Predictivo
Pos
ició
n %
Reconocimiento

Capítulo 4
57
Figura 4.17 Variación del horizonte de predicción y factor de ponderación. 4.4.2 Identificación de mínimos cuadrados (error de salida):
4.4.2.1 Respuesta ante la variación de la señal de referencia +/-20%, respondiendo el sistema (figura a), ante un flujo de fluido caliente (perturbación) constante en 150lbm/min, horizonte de predicción de 10 períodos de muestreo y un factor de ponderación que varía de 8 a 60, según la señal de control. Con el control predictivo la temperatura To presenta mayores oscilaciones.
50 150 250 350 450 -0.2
0
0.2
0.4
Figura a. Respuesta del Sistema To
Tiempo(s)
Tem
pera
tu
Control Predictivo
Control Predictivo adactativo
50 150 250 350 4500
0.1
0.3
0.5
0.7
Figura b. Señal de Control
Control Predictivo
Control Predictivo adactativo
Reconocimiento

Capítulo 4
58
Figura 4.18 Variación de la señal de referencia
4.4.2.2 Respuesta ante la variación del flujo de fluido caliente (perturbación) de 160 a 150lbm/min: (figura c), con referencia de +/-10%, horizonte de predicción de 10 períodos de muestreo constante y factor de ponderación que varía de 8 a 60, según el valor de la señal de control. El factor de peso actúa mejor para el control predictivo adaptativo, respondiendo mas rápido a la referencia.
Respuesta del sistema(figura a), con el control predictivo y control predictivo adaptativo.
50 150 250 350 450-0.1
-0.05
0
0.05
0.1
0.15 Figura a. Respuesta del Sistema To
Tiempo(s)
Control Predictivo
Control Predictivo adaptativo
50 150 250 350 4500.15
0.25
0.35
0.45
Figura b. Señal de Control Control Predictivo adaptativo
Control Predictivo
Tem
pera
tura
ºF
0 50 100 150
148
150
152
154
156
158
160
162
Tiempo(s)
Figura c. Cambio de Flujo de Entrada W1
Fluj
o lb
m/m
in
Reconocimiento

Capítulo 4
59
Figuras 4.19 Variaciones del flujo de entrada
4.4.2.3 Variaciones del horizonte de predicción 15 y el factor de ponderación 15-80: Con una valor del flujo de fluido caliente (perturbación) de 150lbm/min y una señal de referencia de +/-10%. Ambos controles presentan “chating” en la posición de la válvula ó señal de control (figura b).
Respuesta del sistema según el punto de operación ante el control predictivo y adaptativo.
50 150 250 350 450 -0.1
0
0.1
0.2
0.3 Figura a. Respuesta del Sistema To
Tiempo(s)
Tem
pera
tura
Control Predictivo
Control Predictivo Adaptativo
50 150 250 350 450 0
0.1
0.2
0.3
0.4
0.5 Figura b. Señal de Control
Control Predictivo
Control Predictivo Adaptativo
Reconocimiento

Capítulo 4
60
Figura 4.20 Variación del horizonte de predicción y factor de ponderación
4.4.3 Identificación por Lotes.
4.4.3.1 Variación de la señal de referencia de –9% a 15% (figura c): con la aplicación del control predictivo y adaptativo con entrada del flujo de fluido caliente constante en 150lbm/min, horizonte de predicción de 5 períodos por muestreo y factor de ponderación 14.
El sistema ante el control predictivo presenta muchas oscilaciones
logrando saturarse(figura b), el sistema en los valores de referencia de 15%. Mientras que con el control predictivo adaptativo el sistema responde a la consigna.
0 50 150 250 350 450 -0.1
0
0.1
0.25
0.35 Figura a. Respuesta del Sistema To
Tiempo(s)
Tem
pera
tura
Control Predictivo
Control Predictivo Adaptativo
0 50 150 250 350 450
0.1
0.3
0.5
0.7 Figura b. Señal de Control
Control Predictivo
Control Predictivo Adaptativo
50 150 250 350 450
-0.1
-0.05
0
0.05
0.1
0.15 Figura c. Señal de Referencia
Tiempo(s)
Tem
pera
tura
Reconocimiento

Capítulo 4
61
Figura 4.21 Variación de la señal de referencia
4.4.3.2 Variación del flujo de fluido caliente que va de 100 a 250lbm/min: con un horizonte de predicción de 5 períodos de muestreo y factor de ponderación de 14 para una señal referencia de +/-5%. La respuesta del sistema (figura a), presenta muchas oscilaciones para valor de referencia negativo con el control predictivo, observándose mejor estabilidad para el control predictivo adaptativo para dicho cambio de flujo de entrada (perturbación).
0 100 200 300 400 500
-0.15
-0.05
0
0.05
0.15 Figura a. Respuesta del Sistema To
Control Predictivo
Control Predicitivo Adaptativo
Tiempo(s)
Tem
pera
tura
ºF
0 100 200 300 400 5000
0.2
0.4
0.6
Figura b. Señal de Control
Control Predictivo
Control Predictivo Adaptativo
Reconocimiento

Capítulo 4
62
Figuras 4.22 Variaciones del flujo de entrada 4.4.3.3 Variaciones del factor de ponderación y horizonte de predicción 25 y 10 perìodos de muestreo respectivamente: con entrada de flujo de fluido caliente (perturbación) de 200 a 110lbm/min y señal de referencia de +/-5%. Respuesta del sistema (figura a), ante dicha variaciones con la presencia del control predictivo y adaptativo. Se logra observar la importancia de los parámetros del control para la mejora de la respuestas tanto para control predictivo como para control predictivo adaptativo.
0 100 200 300 400 500
-0.15
-0.05
0
0.05
0.15 Figura a. Respuesta del Sistema To
Tiempo(s)
Control Predictivo
Control Adaptativo
Tem
pera
tura
ºF
0 100 200 300 400 500 0.05
0.15
0.25
0.35
0.45
Figura b. Señal de Control
Control Predictivo
Control Adaptativo
Reconocimiento

Capítulo 4
63
Figura 4.23 Variación del horizonte de predicción y factor de ponderación
Reconocimiento

Capítulo 4
64
El Control Predictivo Adaptativo aplicado al proceso de mezcla se
comporta de manera satisfactoria, mejorando sustancialmente la
respuesta con respecto al Control Predictivo; el sistema presenta una
respuesta aceptable. Además el sistema se comporta satisfactoriamente
en presencia de variaciones de las perturbaciones. Este tipo de control
utiliza únicamente la información relacionada con las entradas y las
salidas del proceso; en consecuencia, no es necesario tener a priori un
modelo del proceso; por identificación se obtiene un modelo adecuado
para el diseño de la ley de control.
El horizonte de predicción representa un elemento primordial en el
desempeño de la acción de control, pues la variación de este parámetro
permite “jugar” con los tiempos de respuesta de sistema de acuerdo a las
exigencias presentadas. Se observó que a medida que se aumenta el
horizonte de predicción, la respuesta se hace más estable, aunque incurre
en un aumento del tiempo de cómputo de las acciones de control a
aplicar. Es también muy importante la escogencia del factor de
ponderación para obtener que respuestas sean suficientemente rápidas en
el tiempo.
El control predictivo adaptativo mejora la respuesta del sistema
ante cambios de la señal de referencia; sin embargo, no se observa nota
una mejora notable cuando se modifica el flujo de fluido caliente
(perturbación). En general, la presencia de tiempos muertos dificulta
CONCLUSIÓN
Reconocimiento

Capítulo 4
65
enormemente el control de un proceso. Se pudo verificar que el control
predictivo es una solución satisfactoria en este caso.
Los resultados obtenidos muestran que el control predictivo
adaptativo siempre arroja buenos resultados si se selecciona
adecuadamente el horizonte de predicción y el factor de ponderación.
Reconocimiento

Capítulo 4
66
[1] Ogata K. Ingeniería de Control Moderna 1970 México, Pretince "Sistema de
control Optimo y Adaptativo", pp. 854 - 861. [2] Camacho O, Smith C. and Chacón E. "Toward an Implemantation of Sliding
Mode Control to Chemical Processes": [3] Quevedo J. (1986).. Mundo Electrónico, "Control Adaptativo de procesos
industriales" N° 163, pp. 45 - 54 [4] Aström Karl J. and Björn W. Adaptive Control. 1970 New Jersey. Pretince
Cap 5 pp.94 - 254 [5] E.F. Camacho C. Bordons, 1998 Springer. Model Predictive Control [5] D. W. Clarke, C. Mohtadi and P.S. Tuffs. 1987. "Generalized predictive
Control". Automática Vol. 23 N° 2. pp. 137 – 148 [6] Cardozo Moreno, Eyra. 2000, Utilización del Control Predictivo de Largo
Alcance en Sistemas con Retardo Importante Caso Proceso de Mezclado. Tesis de Grado. Universidad de Los Andes.
[7] Sanchis J., Martines M., Blasco X. y Senet J. Experimentación en Control Predictivo Basado en Modelos Depto. De Ingeniería de Sistemas, Computadores y Automática. Universidad Politécnica de Valencia. Valencia - España. http://www.isa.upv.es.com .
BIBLIOGRAFÍA
Anexo 1
Reconocimiento

Capítulo 4
67
Función de Costo cuadrático:
{ }21
221 ])1()[()]()/()[()2,1( −+λ++−+δ= == jtujjtwtjtyjENNJ N
jN
Nj ΔΣΣ
(i)
Rescribiendo (i) en forma matricial:
{ } { }uuwywyENJEJ TT ~~)()(),1(1 λ+−−==
(ii)
como fuGy += ~ la ecuación (ii) queda de la forma:
{ }uuwfuGwfuGEJ TT ~~)~()~(1 λ+−+−+=
(iii) La minimización de la función de costo viene dada por: ( ){ ( ) } { }TT uutrwfuGwfuGtrJ ~~~~
1 λ+−+−+= (iv)
{ } { }TTTTTTTTTTTTT uutrwwwfGuwfwffGufwuGfuGGuuGtrJ ~~~~~~~~1 λ++−−−++−+=
{ } { } 0~~~)~~~~~~(~~
1 =++−−−++−+= TTTTTTTTTTTTTT uuud
dtrwwwfGuwfwffGufwuGfuGGuuGud
dtrud
dJ λ
Conforme el cálculo de traza de funciones matriciales (1-2-3) del Apéndice 6[4]: 0)~(2 =+−+ uwGfGuGG TTT λ (v) { } 0)()(~ =−−+ fwGIGGu TT λ (vi) )()(~ 1 fwGIGGu TT −+= −λ (vii) Note que el primer elemento de u~ es )(tuΔ de maneta que el control u(t) es dado por:
Anexo 1
Reconocimiento

Capítulo 4
68
)()1()( fwgtutu T −+−= (viii) Donde Tg es la primera fila de TT GIGG )( λ+
Reconocimiento

Capítulo 4
69
Las ecuaciones a continuación ilustran el método de euler.
Donde: retar : tiempo de retraso.
ret: es un valor entero del tiempo retraso.
T4: valor de salida de la temperatura del tanque de mezcla.
t4e: temperatura del tanque de mezcla normalizada.
Tof: dinámica del sensor.
Vpf: dinámica de la válvula.
W2=500*Cv*Vpi*sqrt(Gf*dPv)/60;
T3f=T3i+h*(W1*Cp1*T1+W2*Cp2*T2(W1+W2)*Cp3*T3i)/(V*ro*C3
ret=ceil(max(0,retar/h));
T4=Ld(ret);
t4e=max(0,min((T4-50)/200,1));
Tof=Toi+h*(t4e-Toi)/taut;
Vpf=Vpi+h*(m-Vpi)/tauv;
Anexo 2
Reconocimiento

Capítulo 4
70
Para la simulación del proceso se utilizaron una serie de entrada y condiciones iniciales del sistema, el periodo h, es tomado de tal forma de obtener una buena aproximación del tiempo de retardo del sistema.
W1=150 Condición inicial del flujo de agua caliente, lbm/min.
Cp3=0.9 Capacidad calórica del líquido en el tanque mezclador,
BTU lbm-ªF Cp1=0.8 Capacidad calórica del líquido en el flujo caliente, BTU lbm-ºF. Cp2=1 Capacidad calórica del líquido en el flujo frío, BTU lbm-ºF. taut=0.5 Constante de tiempo del sensor de temperatura, min. tauv=0.4 Constante de tiempo del actuador, min. Cv3=0.9 Capacidad calórica del líquido del tanque a volumen constante, BTU lbm/ºF. ro=62.4 Densidad del líquido del tanque mezclador, lbm/pies3. L=125 Longitud del tubo transportado, pies. dPv=16 Factor de reducción de presión del flujo de la válvula, psi. Cv=12 Coeficiente del flujo de la válvula, gmp/psi1/2. V=15 Volumen del líquido, pies3. T1=250 Temperatura inicial del flujo caliente ºF. T2=50 Temperatura inicial del flujo frío ºF. Gf=1 Gravedad específica. aa=0.20 Sección transversal del tubo, pies.
Anexo 3
Reconocimiento

Capítulo 4
71
h=0.05 Período de muestreo utilizado para la simulación, u.t.
Reconocimiento

Capítulo 4
72
Programa que simula el proceso del Tanque
clear w1max=150;Cp3=.9;taut=.5;tauv=.5;Cp1=.8;Cp2=1;Cv3=.9; ro=62.4;L=125;A=.2006; V=15;Cv=12;T1=250;T2=50;dPv=16; %Condiciones Iniciales Re=8; Ti=3.5; Gf=1; T3(1)=150; Vp(1)=0.478; ga=1; To(1)=0; Ld=T3(1)*ones(1,1000); m=.5; To(1)=.5; h=.05; TVp=[Vp(1)];TT3=[T3(1)];VVp=[Vp(1)];TTo=[To(1)]; TT4=[T3(1)];M=[.275];TW2=[];S=[]; for t=1:200; if t<100,m=0.278; else m=0.228; end M=[M;m]; S=[S;m]; if t<50, W1=w1max; else W1=w1max; end Vpi=Vp(t);T3i=T3(t);Toi=To(t); for J=1:16; Ld=[T3i Ld(1:299)]; W2=500*Cv*Vpi*sqrt(Gf*dPv)/60; T3f=T3i+h*(W1*Cp1*T1+W2*Cp2*T2-(W1+W2)*Cp3*T3i)/(V*ro*Cv3); retar=L*A*ro/(W1+W2); ret=ceil(max(0,retar/h)); T4=Ld(ret); t4e=max(0,min((T4-50)/200,1)); Tof=Toi+h*(t4e-Toi)/taut; Vpf=Vpi+h*(m-Vpi)/tauv; Vpi=Vpf;T3i=T3f;Toi=Tof;
Anexo 4
Reconocimiento

Capítulo 4
73
end; T3(t+1)=T3f;To(t+1)=Tof;Vp(t+1)=Vpf; TTo=[TTo;To(t+1)];TVp=[TVp;Vp(t+1)];TT3=[TT3;T3(t+1)]; TT4=[TT4;T4];TW2=[TW2;W2]; end; [nd,md]=size(TTo); y=TTo(1:nd)-TTo(1); u=M(1:nd)-M(1);
Reconocimiento

Capítulo 4
74
Identificación por mínimos cuadrados (error de predicción)
N=15;r1=100; u=(Vp-Vp(1))'; y=(T4e-T4e(1))'; th=arx([y u],[4 1 8]); ym=idsim(u,th); [Ac Bc]=th2arx(th); [F,G,K]=gpc(Ac,Bc,N,r1); nf=max(size(F))-1; ng=max(size(G)); nk=max(size(K)); na=max(size(Ac)); nb=max(size(Bc)); tho=[Ac(2:na) Bc(nb)]; T3(1)=151.2675;Vp(1)=0.278;T4(1)=T3(1);T4e=max(0,min((T4(1)-50)/200,1)); To(1)=.5063;Ld=T3(1)*ones(1,2000); To2(1)=To(1); h=.05;TW2=[]; ul=zeros(nf-1,1); yl=zeros(ng,1);M=[0]; ref=zeros(nk,1); gam=1; TTH=[tho]; m1=0; TTo=[]; M=[];SC=[]; figure(1) plot([y ym]) %respuesta y la identificada
Anexo 5
Reconocimiento

Capítulo 4
75
Identificación por mínimos cuadrados (error de salida)
N=20;r1=30; u=(M-M(1)); y=(T4e-T4e(1))'; th1=oe([y u],[1 4 8]); [BB FF]=th2tf(th1); tho1=roe([y u],[1 4 8],'ff',.9,[BB(9) FF(2:5)]); ym=idsim(u,th1); [Ac Bc]=th2arx(th1); [F,G,K]=gpc(Ac,Bc,N,r1); nf=max(size(F))-1; ng=max(size(G)); nk=max(size(K)); na=max(size(Ac)); nb=max(size(Bc)); tho=[BB(9) FF(2:5)]'; T3(1)=151.2675;Vp(1)=0.278;T4(1)=T3(1);T4e=max(0,min((T4(1)-50)/200,1)); To(1)=.5063;Ld=T3(1)*ones(1,2000); To2(1)=To(1); h=.05;TW2=[]; ul=zeros(nf-1,1); yl=zeros(ng,1); ref=zeros(nk,1); gam=.5; TTH=[]; m1=0; FF1=[];GG1=[];KK1=[];TTo=[]; M=[];Ref=[];alpha=.01;VVp=[];SR=[]; figure(8) plot([y ym]) %respuesta y la identificada
Anexo 6
Reconocimiento

Capítulo 4
76
Calculo de la Ley de Control Predictivo, Desarrollado en MATLAB. (Programa Realizado por el Profesor Dulhoste)
function [fcs,gc,Kes]=gpc(Ac,Bc,N,r1); %Ac=[1 -.5 .25];Bc=[0 0 1]; N=5;r1=1; A=conv([1 -1],Ac); n=max(size(A)); m=max(size(Bc)); i=1; while Bc(i)==0,do=i;i=i+1; end B=Bc(do+1:m); Ni=do; Nf=do+N; F1=[];G1=[];R=[]; %construccion de la matriz Phi for d=do:Nf; a=[A';zeros(d-1,1)]; na=max(size(a)); Phi=a; for i=1:d-1; a=[0;a(1:na-1)]; Phi=[Phi a]; end b=[zeros(d,1);1;zeros(n-2,1)]; Phi=[Phi b]; for i=1:n-2; b=[0;b(1:na-1)]; Phi=[Phi b]; end %resolucion de la ecuacion polinomial %1=A(q)F(q)+qdG(q) c=[1;zeros(d+n-2,1)]; co=inv(Phi)*c; F=co(1:d)'; G=co(d+1:d+n-1)'; BF=conv(B,F); nbf=max(size(BF)); F1=[F1;BF(d+2-do:nbf)]; G1=[G1;G]; R=[R;[BF(d+1-do:-1:1) zeros(1,Nf-d)]]; end K=inv(R'*R+r1*eye(Nf-do+1,Nf-do+1))*R';
Anexo 7
Reconocimiento

Capítulo 4
77
K1=K(1,:); Kes=sum(K1); fc=K1*F1; fcs=[1 fc]; gc=K1*G1;
Reconocimiento

Capítulo 4
78
Control Predictivo Adaptativo para la Identificación por mínimos cuadrados (error de predicción).
clear %definicion de los parametros w1max=150; w1min=150;Re=8;Ti=3.5;Cp3=.9;taut=.5; tauv=.4;Cp1=.8;Cp2=1;Cv3=.9;ro=62.4;L=125;A=.2006; Gf=1; dPv=16; Cv=12; V=15;ga=1; T1(1)=250; T2=50; %definicion de las condiciones iniciales T3(1)=151.2675;Vp(1)=0.278;T4(1)=T3(1);T4e=max(0,min((T4(1)-50)/200,1)); To(1)=.5063;Ld=T3(1)*ones(1,300); To2(1)=To(1); h=.05; TW2=[]; M=[.278]; %simulacion for t=1:120; if t<10,m=.278;else m=.228;end if t<50, W1=w1max; else W1=w1min;end M=[M;m]; Vpi=Vp(t);T3i=T3(t);Toi=To(t); for J=1:16; Ld=[T3i Ld(1:299)]; W2=500*Cv*Vpi*sqrt(Gf*dPv)/60; T3f=T3i+h*(W1*Cp1*T1+W2*Cp2*T2-(W1+W2)*Cp3*T3i)/(V*ro*Cv3); retar=L*A*ro/(W1+W2); ret=ceil(max(0,retar/h)); t4=Ld(ret); t4e=max(0,min((t4-50)/200,1)); Tof=Toi+h*(t4e-Toi)/taut; Vpf=Vpi+h*(m-Vpi)/tauv; Vpi=Vpf;T3i=T3f;Toi=Tof; end; T3(t+1)=T3f;To(t+1)=Tof;Vp(t+1)=Vpf;T4(t+1)=t4;T4e(t+1)=t4e; To2(t+1)=To(t+1);TW2=[TW2;W2]; end; N=15;r1=90; % Identificacion u=(M-M(1)); y=(T4e-T4e(1))'; th=arx([y u],[4 1 8]); ym=idsim(u,th);
Anexo 8
Reconocimiento

Capítulo 4
79
[Ac Bc]=th2arx(th); [F,G,K]=gpc(Ac,Bc,N,r1); nf=max(size(F))-1; ng=max(size(G)); nk=max(size(K)); na=max(size(Ac)); nb=max(size(Bc)); tho=[Bc(9) Ac(2:5)]'; T3(1)=151.2675;Vp(1)=0.278;T4(1)=T3(1);T4e=max(0,min((T4(1)-50)/200,1)); To(1)=.5063;Ld=T3(1)*ones(1,2000); To2(1)=To(1); h=.05;TW2=[]; ul=zeros(nf-1,1); yl=zeros(ng,1); ref=zeros(nk,1); gam=.5; TTH=[]; m1=0; FF1=[];GG1=[];KK1=[];TTo=[]; M=[];Ref=[];alpha=.01;VVp=[];SR=[]; %figure(8) %plot([y ym]) respuesta y la identificada for t=1:500; if t<250,ref=-0.1;else ref=0.05;end %ref=[ref(2:nk);Toref]; if ref<0,r1=5;else r1=40;end Ref=[Ref;ref]; m1i=(K*ref-F(2:nf)*ul-G*yl)/F(1); m1=m1+m1i; %integrador m=max(0,min(1,m1+.278)); M=[M;m]; %Señal de control SR=[SR;ref]; %Señal de referencia Vpi=Vp(t);T3i=T3(t);Toi=To(t); for J=1:16; Ld=[T3i Ld(1:1999)]; W2=500*Cv*Vpi*sqrt(Gf*dPv)/60; T3f=T3i+h*(W1*Cp1*T1+W2*Cp2*T2-(W1+W2)*Cp3*T3i)/(V*ro*Cv3); retar=L*A*ro/(W1+W2); ret=ceil(max(1,retar/h)); t4=Ld(ret); t4e=max(0,min((t4-50)/200,1)); Tof=Toi+h*(t4e-Toi)/taut;
Reconocimiento

Capítulo 4
80
Vpf=Vpi+h*(m-Vpi)/tauv; Vpi=Vpf;T3i=T3f;Toi=Tof; end; T3(t+1)=T3f;To(t+1)=Tof;Vp(t+1)=Vpf;T4(t+1)=t4;T4e(t+1)=t4e;TW2=[TW2;W2]; ul=[m1i;ul(1:nf-2)]; yl=[To(t+1)-.5063;yl(1:ng-1)]; Vp1=(m-.278); VVp=[VVp;Vp1]; To1=(Tof-0.5063); TTo=[TTo;To1]; % Función recursiva Construida if t>15, fi=[VVp(t-8);-TTo(t-1:-1:t-4)]; error=To1-fi'*tho; tho=tho+(gam*error/(alpha+fi'*fi))*fi; end; TTH=[TTH tho]; nt=max(size(tho)); Ac=[1 tho(2:nt)']; Bc=[zeros(1,8) tho(1)]; [F,G,K]=gpc(Ac,Bc,N,r1); [F1,G1,K1]=gpc(Ac,Bc,N,r1); FF1=[FF1;F1]; GG1=[GG1;G1];KK1=[KK1;K1]; end;
Reconocimiento

Capítulo 4
81
Control Predictivo Adaptativo para la Identificación por lotes y ajuste del factor de ponderación.
clear %definicion de los parametros w1max=150; w1min=150;Re=8;Ti=3.5;Cp3=.9;taut=.5; tauv=.4;Cp1=.8;Cp2=1;Cv3=.9;ro=62.4;L=125;A=.2006; Gf=1; dPv=16; Cv=12; V=15;ga=1; T1(1)=250; T2=50; %definicion de las condiciones iniciales T3(1)=151.2675;Vp(1)=0.278;T4(1)=T3(1);T4e=max(0,min((T4(1)-50)/200,1)); To(1)=.5063;Ld=T3(1)*ones(1,300); To2(1)=To(1); h=.05; TW2=[]; M=[.278]; %simulacion for t=1:120; if t<10,m=.278;else m=.228;end if t<50, W1=w1max; else W1=w1min;end M=[M;m]; Vpi=Vp(t);T3i=T3(t);Toi=To(t); for J=1:16; Ld=[T3i Ld(1:299)]; W2=500*Cv*Vpi*sqrt(Gf*dPv)/60; T3f=T3i+h*(W1*Cp1*T1+W2*Cp2*T2-(W1+W2)*Cp3*T3i)/(V*ro*Cv3); retar=L*A*ro/(W1+W2); ret=ceil(max(0,retar/h)); t4=Ld(ret); t4e=max(0,min((t4-50)/200,1)); Tof=Toi+h*(t4e-Toi)/taut; Vpf=Vpi+h*(m-Vpi)/tauv; Vpi=Vpf;T3i=T3f;Toi=Tof; end; T3(t+1)=T3f;To(t+1)=Tof;Vp(t+1)=Vpf;T4(t+1)=t4;T4e(t+1)=t4e; To2(t+1)=To(t+1);TW2=[TW2;W2]; end; N=5;r1=2; % Identificacion u=(M-M(1)); u1=ones(max(size(M)),1); y=(T4e-T4e(1))'; th=arx([y u ],[4 1 8]);
Anexo 10
Reconocimiento

Capítulo 4
82
th1=oe([y u u1],[[1 1],[4 0], [8 0]]); [BB, FF]=th2tf(th1,1); [BB2, FF2]=th2tf(th1,2); tho1=roe([y u],[1 4 8],'ff',.9,[BB(9) FF(2:5)]); ym=idsim(u,th); [Ac Bc]=th2arx(th); [F,G,K]=gpc(Ac,Bc,N,r1); nf=max(size(F))-1; ng=max(size(G)); nk=max(size(K)); na=max(size(Ac)); nb=max(size(Bc)); tho=[BB(9) FF(2:5)]'; %tho=[Ac(2:na) Bc(nb)]; T3(1)=151.2675;Vp(1)=0.278;T4(1)=T3(1);T4e=max(0,min((T4(1)-50)/200,1)); To(1)=.5063;Ld=T3(1)*ones(1,2000); To2(1)=To(1); h=.05;TW2=[]; ul=zeros(nf-1,1); yl=zeros(ng,1); ref=zeros(nk,1); gam=.5; TTH=[]; m1=0; FF1=[];GG1=[];KK1=[];TTo=[]; M=[];Ref=[];alpha=.01;VVp=[];Tm=[]; for t=1:500; if t<200,W1=100;else W1=250;end if t<250,ref=-0.1;else ref=0.2;end m1i=(K*ref-F(2:nf)*ul-G*yl)/F(1); m1=m1+m1i; %integrador m=max(0,min(1,m1+.278)); %r1=2; r1=(100/W1)/(m^2+.01); M=[M;m]; Vpi=Vp(t);T3i=T3(t);Toi=To(t); for J=1:16; Ld=[T3i Ld(1:1999)]; W2=500*Cv*Vpi*sqrt(Gf*dPv)/60; T3f=T3i+h*(W1*Cp1*T1+W2*Cp2*T2-(W1+W2)*Cp3*T3i)/(V*ro*Cv3); retar=L*A*ro/(W1+W2); ret=ceil(max(1,retar/h)); t4=Ld(ret); t4e=max(0,min((t4-50)/200,1));
Reconocimiento

Capítulo 4
83
Tof=Toi+h*(t4e-Toi)/taut; Vpf=Vpi+h*(m-Vpi)/tauv; Vpi=Vpf;T3i=T3f;Toi=Tof; end; T3(t+1)=T3f;To(t+1)=Tof;Vp(t+1)=Vpf;T4(t+1)=t4;T4e(t+1)=t4e;TW2=[TW2;W2]; ul=[m1i;ul(1:nf-2)]; yl=[To(t+1)-.5063;yl(1:ng-1)]; %Identificación por lotes Vp1=(m-.278); VVp=[VVp;Vp1]; To1=(Tof-0.5063); TTo=[TTo;To1]; tm=mod(t,100); Tm=[Tm;tm]; if tm>98, y=TTo(t-99:t);u=VVp(t-99:t);u1=ones(100,1); thr=oe([y u u1],th1); th1=thr; [Br,Fr]=th2tf(thr); tho=[Br(9) Fr(2:5)]; TTH=[TTH;tho]; nt=max(size(tho)); Ac=[1 tho(2:nt)]; Bc=[zeros(1,8) tho(1)]; [F,G,K]=gpc(Ac,Bc,N,r1); end; end;
Reconocimiento

Capítulo 4
84
DIFERENCIACIÓN DE FUNCIONES DE TRAZA CON
RESPECTO A MATRICES.
TT BAxAxBtr
=∂
∂ )( (1)
BAx
BAxtr T=
∂∂ )( (2)
xBABAx
BAxxtr TTT
)()(+=
∂∂ (3)
Anexo 11
Reconocimiento

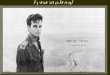














![0101/130 93518969 otnn -tan a nn.n (1) 1993 -Y')vnn n»pn 2016 … · 2017-02-28 · 2016 at 09-9711444 .Ò 2N .2 nnn: nyyo nnt nmyn CIP ... nmnn C] Cl nyv N' .nryvn IN 42) nÐ1pnv](https://img.pdfslide.fr/doc/110x75/5f3b25aceaf78f4ca26a6696/0101130-93518969-otnn-tan-a-nnn-1-1993-yvnn-npn-2016-2017-02-28-2016.jpg)