Embed Size (px)
Citation preview
THESE
Présentée à l’Université de Montpellier II
– Sciences et Techniques du Languedoc –
Pour obtenir le grade de docteur
Spécialité : Hydrologie
École Doctorale : Systèmes Intégrés en Biologie, Agronomie, Géosciences, Hydrosciences et
Environnement (SIBAGHE)
Contribution à la prévision des crues sur le bassin du
Lez : modélisation de la relation pluie-débit en zone
karstique et impact de l'assimilation de débits
Présentée et soutenue publiquement par
Mathieu Coustau
Le 13/12/2011
Directeur de thèse : Christophe Bouvier
Co-directeur de thèse : Olivier Thual
Encadrantes : Valérie Borrell-Estupina et Sophie Ricci
Jury :
M. Eric Gaume, ICPEF (IFSTTAR) Rapporteur
M. Jean-François Mahfouf, ICPEF (CNRM) Rapporteur
M. Jo De Waele, Professeur (Université de Bologne) Examinateur
M. Roger Moussa, DR (INRA) Examinateur
M. Christophe Bouvier, DR (IRD) Directeur de thèse
M. Olivier Thual, Professeur (IMFT) Co-directeur de thèse
Mme Caroline Wittwer (SCHAPI) Invitée
RESUME
Les crues « éclair » parfois dévastatrices qui touchent les bassins versants
méditerranéens du Sud de la France sont difficiles à anticiper. Leur prévision passe par
l’utilisation de modèles pluie-débit, dont l'efficacité est encore limitée par les incertitudes
liées notamment à la variabilité spatiale des pluies méditerranéennes et à la caractérisation de
l'état hydrique initial des hydrosystèmes. Dans le cas de bassins karstiques, à ces incertitudes
s'ajoutent celles liées à la dynamique des aquifères et à leur rôle sur la formation des crues. La
première partie de ce travail de thèse propose un modèle pluie-débit horaire, distribué,
événementiel et parcimonieux pour reproduire les crues « éclair » à l'exutoire du bassin
karstique du Lez (Montpellier) de 114 km2. Le modèle est évalué non seulement sur la qualité
des simulations de débits mais aussi sur la qualité de son initialisation obtenu grâce à une
relation entre sa condition initiale et divers indicateurs de l’état hydrique de l’hydrosystème.
Calibré sur 21 épisodes de crues, le modèle fournit des simulations satisfaisantes, et sa
condition initiale est significativement corrélée à l’indice d’humidité Hu2 du modèle SIM de
Météo-France ou à la piézométrie dans l’aquifère du Lez. Les pluies mesurées par radar en
début d’automne sont de bonne qualité et conduisent à une amélioration des simulations de
débit et de l'estimation de la condition initiale du modèle. En revanche, les pluies mesurées
par radar en fin d’automne sont de moindre qualité et n’améliorent pas les simulations. Face
aux incertitudes liées à la paramétrisation du modèle ou à l’estimation des pluies radar, la
deuxième partie du travail de thèse analyse l'apport de l’assimilation des débits observés pour
corriger en temps réel les paramètres les plus sensibles du modèle et notamment sa condition
initiale ou les pluies radar en entrée du modèle. La procédure d’assimilation de données a été
mise en place à l’aide du coupleur PALM, qui permet de relier modèle hydrologique à
l’algorithme d'assimilation. La correction de la condition initiale du modèle permet
généralement d'améliorer les prévisions (sous hypothèse de pluie future connue) ; la
correction de la pluie a des effets similaires. Néanmoins les limites de cette correction sont
atteintes dans le cas où le modèle ne reproduit pas de façon satisfaisante la partie initiale de
montée des eaux, ce qui pourra être amélioré par la suite. Finalement, ce travail de thèse
montre que la complexité d'un bassin karstique peut être représentée efficacement à l'aide d'un
nombre réduit de paramètres, pour simuler les débits, et contribue à l'amélioration des outils
opérationnels pour la prévision des crues.
REMERCIEMENTS
Ces 3 ans de thèse m’ont permis de faire un certain nombre de rencontres
professionnelles et/ou personnelles enrichissantes. Cette page est l’occasion pour moi de
remercier les personnes qui m’ont aidé à arriver au bout de cette aventure qui, comme celle
d’un célèbre Gaulois, se termine finalement bien et par un grand festin.
Mes premières pensées vont à mes encadrants qui ont su me faire confiance et m’ont
épaulé moralement et scientifiquement dans les moments difficiles tout au long de ces 3
années. Je remercie Christophe Bouvier et Valérie Borrell pour m’avoir fait profiter de leurs
compétences en modélisation hydrologique. Merci à Christophe pour sa disponibilité, son
calme, sa sérénité et merci à Valérie pour son dynamisme, sa générosité et sa bonne humeur.
Je remercie aussi Olivier Thual et Sophie Ricci pour m’avoir initié à l’assimilation de
données. Merci à Olivier pour sa simplicité, sa rigueur scientifique et sa disponibilité au cours
de mes séjours à Toulouse. Merci à Sophie pour sa patience, sa pédagogie et l’attention dont
elle a fait preuve lors de mes visites au CERFACS. Merci à vous quatre pour votre soutien au
quotidien.
Mes pensées suivantes vont aux membres du jury de thèse et à ceux des différents
comités de pilotage qui ont contribué, à travers leurs suggestions, à l’amélioration de ce
travail de thèse. Je suis très honoré que messieurs Eric Gaume et Jean-François Mahfouf aient
accepté d’être rapporteurs de cette thèse. Merci à Roger Moussa, Jo De Waele et Caroline
Wittwer d’avoir accepté d’examiner mon manuscrit. Je remercie également les membres des
différents comités de pilotage pour l’intérêt qu’ils ont porté à mes travaux et les remarques
qu’ils ont pu formuler. Merci donc à Pierre-Olivier Malaterre, Florence Habets, Nathalie
Dörfliger, Arthur Marchandise et Christian Leduc.
Je remercie M. Eric Servat pour m’avoir accueilli pendant 3 ans au laboratoire
HydroSciences Montpellier ainsi que l’équipe GlobC du CERFACS pour m’avoir reçu
chaleureusement lors de mes visites à Toulouse.
Je remercie également les organismes ayant fourni les données sur lesquelles reposent
ces travaux de thèse : la DIREN (et en particulier M. Gilles Le-Gac) pour les données de
débits, Météo-France et le SPC Méditerranée Ouest pour les données de pluies au sol et radar,
le SCHAPI pour avoir transmis les indices d’humidité SIM, le BRGM et Véolia pour les
données piézométriques papiers et numériques concernant l’aquifère du Lez et l’INRA pour
les informations concernant la pédologie. Je tiens également à remercier Claire Rodier, Pascal
Brunet, Hervé Jourde et les autres personnes du laboratoire HydroSciences Montpellier
participant à l’élaboration et l’alimentation de la base de données MEDYCYSS.
J’exprime toute ma reconnaissance à M. Michel Bakalowicz qui m’a fait partager sa
passion du karst et ses connaissances sur l’aquifère du Lez. Un grand merci à Anne Crespy et
Agnès Crès pour avoir su résoudre les problèmes informatiques liés à la manipulation
d’ATHYS. Je remercie également les « PALMipèdes » permanents ou non permanents du
CERFACS : merci à Thomas Watotienne et Andrea Piancentini pour les améliorations
apportées à la maquette PALM-ATHYS, merci à Thierry Morel et Anthony Thévenin pour
leur aide sur PALM et merci à Denis Ruelland pour m’avoir initié à ArcGIS et aux SIG. Je
remercie vivement Christine pour m’avoir aidé dans la mise en page du manuscrit de thèse.
J’ai également une pensée pour les enseignants-chercheurs qui m’ont initié à
l’enseignement : merci à Séverin Pistre, Christelle Batiot, Véronique Léonardi, Yann Lerrede,
Henri de la Boisse. Merci aussi et surtout à Valérie qui m’a conseillé pendant ces 3 ans de
monitorat et qui m’a aidé à monter une journée de vulgarisation scientifique avec une classe
de 2nde
. Je remercie également les personnes qui ont participé à l’animation de cette journée :
merci à Pierre Marchand, Alex, Marianne, Rémi, Thomas et Eric. Merci aux stagiaires
Elizabeth, Géraldine, Nicolas, Thomas et Rémi qui ont contribué à l’avancement de ce travail
de thèse.
J’ai une attention particulière pour les amis du laboratoire HydroSciences Montpellier.
Merci à Mahamadou « le dur du bureau 10b » avec qui j’ai pu avoir des discussions
intéressantes en compagnie d’Adnan, Hamid, Karima, Ansou alias le « lion blessé » et
l’imper… turbable Maïmouna. Merci à Mathieu dit « le professeur », scientifique et joggeur
hors norme. Merci à Marianne et Alex, spécialisés dans l’organisation de journées
scientifiques et de soirées festives. Merci à Line pour les discussions plus ou moins sérieuses
qu’on a pu avoir et les jaugeages mémorables d’octobre 2008. Pour les agréables pauses de
midi, merci au groupe des mangeuses et mangeurs de l’IRD : Pierre-Adrien, Guillaume,
Olivier « le maître des tartes » et le trio Fanny .G, Chéchi et Super Grenouille… euh je veux
dire Lila, Cécile et Amélie. Enfin, je remercie chaleureusement Ersin alias « Er professor » et
Halidé pour les excursions, repas et diverses soirées passés en leur compagnie.
Comment ne pas remercier aussi les amis de longue date Manu, Céline, Fabien, Edson,
Pascal, Marion, Jean avec qui j’ai pu passer de très bons moments et oublier mes problèmes
de thésard. Un clin d’œil aussi à toutes les personnes du squash club de Montpellier : Cédric,
Karine, Olivier, Prisca, Daniel, Eric, Hervé, Patou, Marc, Fabien, Fred, Romain, Vincent,
Harold, Benoît, Rémi, Loïs, Régis, Laurent, Maïa, Morgan, William. Milesker aux membres
de l’association des Basques de Montpellier : Claude, Georges, Gérard, Françoise, Olivier,
Régis, Elodie et j’en oublie sûrement.
Enfin merci de tout mon cœur à mes parents et à mon frère pour m’avoir toujours
écouté, réconforté et encouragé dans les moments de doute. Merci enfin à toi Elizabeth qui as
contribué et contribue toujours grandement à mon bien être.
- 1 -
SOMMAIRE
INTRODUCTION GENERALE ....................................................................................................... 7
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE 11
1. PROCESSUS IMPLIQUES DANS LES CRUES D’UN BASSIN VERSANT ................................... 11
1.1. La crue : réponse hydrologique d’un bassin versant .................................................... 11
1.1.1. Qu’est-ce qu’un bassin versant ? ..................................................................... 11
1.1.2. Les crues d’un bassin versant .......................................................................... 12
1.1.3. Les crues rapides ou « éclair » ........................................................................ 13 1.2. Les processus de formation des crues .......................................................................... 14
1.2.1. La pluie ............................................................................................................. 14 1.2.2. Le ruissellement direct ..................................................................................... 14 1.2.3. Autres processus susceptibles d'intervenir dans la formation des crues ......... 16
1.2.4. L’écoulement souterrain en milieu karstique ................................................... 17 1.3. Facteurs liés à la caractérisation des crues méditerranéennes et incertitudes associées
20 1.3.1. Facteurs hydrologiques .................................................................................... 21
1.3.2. Facteurs géographiques ................................................................................... 23
1.4. Conclusion .................................................................................................................... 25
2. LA MODELISATION PLUIE-DEBIT : UN OUTIL POUR REPRESENTER LE COMPORTEMENT
D’UN BASSIN VERSANT .............................................................................................................. 26
2.1. Un modèle pluie-débit : définition et objectif .............................................................. 26 2.1.1. Qu’est-ce qu’un modèle pluie-débit ? .............................................................. 26 2.1.2. A quoi sert un modèle pluie-débit ?.................................................................. 27
2.2. Approches de modélisation .......................................................................................... 27 2.3. Classification des modèles pluie-débit ......................................................................... 28
2.3.1. Classification en fonction de la représentation des processus ........................ 28 2.3.2. Classification en fonction de la représentation spatiale .................................. 30 2.3.3. Classification en fonction de la représentation temporelle ............................. 32
2.4. Calibration et validation d’un modèle .......................................................................... 33 2.4.1. Le choix de la fonction objectif ........................................................................ 33 2.4.2. Les méthodes de calibration ............................................................................. 35 2.4.3. Validation ......................................................................................................... 36
2.5. Conclusion .................................................................................................................... 37
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE ................................................. 39
1. PRINCIPE ET NOTATIONS ................................................................................................. 39
1.1. Principe et utilité .......................................................................................................... 39
1.2. Estimations des états du système ................................................................................. 39 1.3. Observations du système .............................................................................................. 41 1.4. La modélisation des erreurs .......................................................................................... 42
- 2 -
1.5. Récapitulatif des notations utilisées en assimilation de données ................................. 43
2. DESCRIPTION DE QUELQUES TECHNIQUES D’ASSIMILATION DE DONNEES .................... 44
2.1. Méthodes de Cressman et du nudging .......................................................................... 44 2.1.1. Méthode de Cressman ...................................................................................... 44
2.1.2. Méthode du nudging ......................................................................................... 46 2.2. Les méthodes de type filtrage ....................................................................................... 46
2.2.1. Le Best Linear Unbiased Estimator (BLUE) .................................................... 47 2.2.2. Le filtre de Kalman et ses variantes ................................................................. 48
2.3. Les méthodes variationnelles ....................................................................................... 51
2.3.1. La méthode du 3D-VAR .................................................................................... 51 2.3.2. La méthode du 4D-VAR .................................................................................... 53
2.4. Les méthodes de « prévision des erreurs » ................................................................... 54
3. UTILISATION DES TECHNIQUES D’ASSIMILATION DE DONNEES EN HYDROLOGIE .......... 55
3.1. Correction des entrées .................................................................................................. 57 3.2. Correction des paramètres ............................................................................................ 58 3.3. Correction des variables d’état ..................................................................................... 60
3.4. Correction des sorties ................................................................................................... 61
4. CONCLUSION .................................................................................................................... 62
CHAPITRE 3 : L’HYDROSYSTEME KARSTIQUE DU LEZ ........................................................... 63
1. L’HYDROSYSTEME DU LEZ DANS LE CONTEXTE KARSTIQUE MEDITERRANEEN ............ 63
1.1. Enjeux ........................................................................................................................... 63
1.2. Localisation géographique ........................................................................................... 64 1.3. Contexte géologique ..................................................................................................... 64 1.4. Contexte climatique ...................................................................................................... 65
1.5. Organisation de l’hydrosystème ................................................................................... 69
2. LE BASSIN HYDROGEOLOGIQUE ...................................................................................... 70
2.1. Organisation verticale .................................................................................................. 70
2.2. Organisation horizontale .............................................................................................. 77 2.3. Fonctionnement hydrogéologique ................................................................................ 78 2.4. Influence du pompage à la source du Lez .................................................................... 79
3. LE BASSIN TOPOGRAPHIQUE ............................................................................................ 81
3.1. Caractérisation du bassin topographique ...................................................................... 81
3.2. Comportement du bassin versant ................................................................................. 85 3.3. Interactions « surface-souterrain » ............................................................................... 87 3.4. Influence des pompages effectués dans la nappe d’accompagnement ......................... 90
4. TRAVAUX DE MODELISATION SUR L’HYDROSYSTEME DU LEZ ....................................... 91
4.1. Etat de l’art : une modélisation axée sur la source du Lez ........................................... 91 4.2. Comment modéliser les crues de surface sur un bassin karstique ? ............................. 93
- 3 -
5. CONCLUSION .................................................................................................................... 95
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE ............................ 97
1. LES DONNEES HYDRO-PLUVIOMETRIQUES ...................................................................... 97
1.1. Les pluies ...................................................................................................................... 97 1.2. Les débits ...................................................................................................................... 98
2. CARACTERISTIQUES DES EPISODES DE CRUE ................................................................ 101
2.1. Délimitation des épisodes ........................................................................................... 101
2.2. Contrôle de la qualité des pluies radar ....................................................................... 104
2.3. Coefficients de ruissellement ..................................................................................... 107 2.4. Courbes de récession .................................................................................................. 109 2.5. Périodes de retour ....................................................................................................... 110
3. LES INDICATEURS DE L’ETAT HYDRIQUE DE L’HYDROSYSTEME .................................. 110
3.1. Les indices d’humidité SIM ....................................................................................... 110 3.2. Les données piézométriques ....................................................................................... 113
4. FACTEURS INFLUENÇANT LA REPONSE DU BASSIN ........................................................ 118
5. CONCLUSION .................................................................................................................. 120
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES
CRUES DU LEZ ........................................................................................................................ 121
1. UN MODELE HYDROLOGIQUE POUR LES CRUES DU LEZ ............................................... 121
1.1. Organisation générale du modèle ............................................................................... 121 1.2. Fonctions de production du modèle ........................................................................... 124
1.2.1. Représentation de l’état hydrique du bassin versant ..................................... 124 1.2.2. Intermittence de la pluie ................................................................................. 127
1.2.3. Représentation d'un écoulement retardé ........................................................ 128
1.3. La fonction de transfert .............................................................................................. 131
2. CHOIX D’UN MODELE DE PRODUCTION ......................................................................... 132
2.1. Caractéristiques de l'échantillon des crues ................................................................. 133 2.2. Calibration de la fonction de production SCS-SMA .................................................. 133 2.3. Calibration de la fonction de production SCS-CN ..................................................... 140 2.4. Représentation des écoulements retardés ................................................................... 143
3. MODELISATION DES CRUES DE SURFACE DU LEZ ......................................................... 144
3.1. Sensibilité des paramètres .......................................................................................... 144 3.2. Calibration .................................................................................................................. 148
3.3. Performances .............................................................................................................. 149 3.3.1. Simulations des débits à l’exutoire du bassin ................................................ 149 3.3.2. Initialisation du modèle événementiel ............................................................ 152
- 4 -
3.3.3. Validation du modèle et performances en mode opérationnel ....................... 154 3.4. Interprétations ............................................................................................................. 155
3.4.1. Niveau dans le réservoir « sol » vs humidité ................................................. 155 3.4.2. Niveau dans le réservoir « sol » vs piézométrie ............................................. 156
3.4.3. Injection des débits observés à la source du Lez ........................................... 157
4. CONCLUSION .................................................................................................................. 161
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES POUR LA
PREVISION DES CRUES ............................................................................................................ 163
1. PRINCIPE ET IMPLEMENTATION DE LA TECHNIQUE D’ASSIMILATION DE DONNEES .... 163
1.1. Principe du BLUE et de sa boucle externe ................................................................. 163 1.2. Illustration par un exemple simple ............................................................................. 164 1.3. Implémentation du BLUE sous PALM ...................................................................... 167
2. CORRECTION DES PARAMETRES DU MODELE HYDROLOGIQUE .................................... 169
2.1. Objectifs et données utilisées ..................................................................................... 169
2.1.1. Objectifs ......................................................................................................... 169 2.1.2. Données utilisées ............................................................................................ 169
2.2. Application de la procédure d’assimilation ................................................................ 170
2.2.1. Détermination de xb, y
o, B et R ....................................................................... 170
2.2.2. Critères d’évaluation ...................................................................................... 171
2.2.3. Efficacité en mode « prévision » .................................................................... 172 2.3. Résultats sur l’ensemble des épisodes ........................................................................ 173
2.3.1. Correction de S ............................................................................................... 174 2.3.2. Correction de V .............................................................................................. 175 2.3.3. Correction de S et V ....................................................................................... 176
2.3.4. Sensibilité au rapport entre les matrices B et R ............................................. 178 2.4. Les limites de la méthode ........................................................................................... 179
2.4.1. Le problème de la montée de crue : exemple de décembre 1997 ................... 180 2.4.2. Le problème des crues à pointes multiples : exemple du pic 2 de septembre
2005 181
3. CORRECTION DES PLUIES FORÇANT LE MODELE HYDROLOGIQUE .............................. 183
3.1. Objectifs et données utilisées ..................................................................................... 183 3.1.1. Objectifs ......................................................................................................... 183
3.1.2. Données utilisées ............................................................................................ 184 3.2. Application de la technique d’assimilation de données ............................................. 185
3.2.1. Principe de la correction des pluies par le BLUE ......................................... 185 3.2.2. Application en mode réanalyse ...................................................................... 186 3.2.3. Application en mode prévision ....................................................................... 187
3.3. Résultats en mode réanalyse ...................................................................................... 189
3.3.1. Comparaison des valeurs de et MFB .......................................................... 189 3.3.2. Efficacité de la correction du BLUE sur les simulations de débit ................. 192
3.4. Résultats en mode prévision ....................................................................................... 194
3.4.1. Comparaison du alpha et du MFB ................................................................. 194 3.4.2. Efficacité de la correction du BLUE sur les simulations de débits ................ 197
- 5 -
4. CONCLUSION .................................................................................................................. 200
CONCLUSION GENERALE ....................................................................................................... 203
TABLE DES FIGURES ............................................................................................................... 207
TABLE DES TABLEAUX ........................................................................................................... 213
RÉFÉRENCES BIBLIOGRAPHIQUES ......................................................................................... 217
INTRODUCTION GENERALE
- 7 -
INTRODUCTION GENERALE
Les crues « éclair » : une catastrophe naturelle dévastatrice et meurtrière
Les inondations représentent la moitié des catastrophes naturelles mondiales, faisant
près de 20 000 victimes par an. En France, le risque inondation figure au premier rang des
risques naturels majeurs et concerne 13 300 communes dont 300 grandes agglomérations, soit
près 2 millions de personnes. Ce risque est particulièrement présent dans la région du Sud de
la France soumis au climat méditerranéen. Les bassins versants de cette région sont en effet
soumis à des crues « éclair » provoquées par des pluies intenses se produisant principalement
en automne. Ces crues, par définition « soudaines » et « difficilement prévisibles » sont à
l’origine d’inondations dévastatrices et parfois meurtrières qui ont marqué les esprits. On peut
citer notamment les crues de Nîmes en 1988 (500 M€ de dégâts et 10 victimes), de Vaison-la-
Romaine en 1992 (touchant la Drôme, le Vaucluse et l’Ardèche faisant 47 victimes et 500 M€
de dégâts), de l’Aude en 1999 (faisant 36 victimes et 3.3 G€ de dégâts), du Gard en 2002 (1.2
G€ de dégâts et 24 victimes)1 ou plus récemment Draguignan en 2010 faisant 25 victimes
2. Il
paraît donc primordial de mieux appréhender et gérer le risque d’inondation lié à ces crues
« éclair ».
Les moyens de gestion du risque de crue
De manière générale, le risque est défini comme la combinaison de l’aléa,
l’inondation, et de la vulnérabilité, cette dernière mesurant les conséquences de cet aléa sur
les enjeux humains et économiques. Comme l’ensemble du territoire français, la région
méditerranéenne a connu pendant ces 60 dernières années une urbanisation importante
augmentant ainsi sa vulnérabilité face aux crues et aggravant parfois l’intensité de ces
dernières. Différents moyens permettent alors de limiter ou mieux gérer le risque de crue. Il
s’agit de mesures de prévention, protection et prévision.
La protection contre les inondations peut prendre différentes formes. La protection
active permet d’agir sur l’aléa. Il s’agit notamment des barrages écrêteurs de crue qui limitent
son intensité. Situés en amont des bassins versants, leur fonction lors d’une crue est de retenir
une quantité d’eau importante et de la restituer progressivement en aval. Ce type
d’aménagement est efficace pour des crues d’intensité inférieure à la crue de projet qui a servi
à les dimensionner. Lorsque l’intensité de cette crue de projet est dépassée, ces ouvrages sont
moins efficaces voire dangereux en cas de rupture. La protection peut aussi être passive : elle
permet alors de réduire la vulnérabilité des enjeux. C’est notamment le rôle des digues de
protection qui permettent d’éviter l’envahissement d’une plaine inondable.
La prévention peut passer par l’élaboration d’un Plan de Prévention du Risque
Inondation (PPRI) qui conduit à une cartographie des zones à risque. Ce PPRI, à disposition
du préfet, permet notamment de réglementer et/ou limiter les installations en zone inondable
réduisant ainsi la vulnérabilité du territoire face aux crues. La prévention peut aussi consister
à informer les populations sur le risque de crue, les rendant ainsi moins vulnérables.
1 http://catalogue.prim.net/49__dossier-d-information-inondation-v1-2.pdf
2 http://physio-geo.revues.org/1349 ; DOI : 10.4000/physio-geo.1349 et http://vertigo.revues.org/11074
3 Le projet Lez Gestion Multi Usages est porté par le BRGM, financé par l’agglomération de Montpellier,
INTRODUCTION GENERALE
- 8 -
La prévision a pour but de savoir où et quand aura lieu la crue et quelle sera son
intensité. Elle permet ainsi d’anticiper l’apparition de la crue et d’alerter les populations qui
peuvent se mettre à l’abri. Les méthodes utilisées pour prévoir les crues diffèrent selon le type
de crue et la taille du bassin concerné. Il y a tout d’abord la prévision « débit-débit » qui
utilise les modèles hydrauliques. Elle consiste à propager les débits mesurés en amont dans le
réseau hydrographique pour prévoir le débit en aval. L’horizon de prévision (autrement dit le
temps séparant le temps présent de celui de la prévision) est alors limité au temps de
propagation dans le réseau hydrographique. Ce type de méthode est adapté aux grands bassins
versants soumis à des crues lentes. Pour les bassins versants plus petits aux crues plus rapides,
une prévision « pluie-débit » est nécessaire. Elle utilise des modèles hydrologiques pluie-débit
qui transforment la pluie observée jusqu’au temps présent en débit à l’exutoire du bassin
versant. Ces outils permettent d’augmenter l’horizon de prévision : au temps de propagation
dans le réseau hydrographique (qui limite les horizons de la prévision « débit-débit ») s’ajoute
le temps de réaction du bassin versant autrement dit le temps que met la crue pour se former
dans le réseau hydrographique. Enfin, des prévisions météorologiques doivent être utilisées
pour augmenter l’horizon de prévision, au-delà du temps de concentration du bassin. Les
prévisions de pluie sont actuellement fournies par différents modèles météorologiques :
ARPEGE (Courtier et Geleyn, 1988 - prévisions à 4 jours, résolution spatiale 10 km,
résolution temporelle 1h) ou ALADIN (Bubnova et al., 1993 - prévisions à 2.5 jours,
résolution spatiale 7.5 km, résolution temporelle 1h), ou la méthode des ANALOGUES,
fondée sur la comparaison des archives des champs de pression [Obled et al., 2002]. Plus
récemment, est apparu le modèle non-hydrostatique AROME [Seity et al., 2011], dont la
résolution spatiale de 2.5 km et la résolution temporelle de 1h paraissent bien adaptées au
contexte de la prévision des crues éclair, à un horizon de 24h.
Prévision des crues « éclair » et objectifs de la thèse
De nombreuses mesures permettent donc de réduire le risque de crue. La protection et
la prévention ont pour but de limiter la vulnérabilité des enjeux ou l’intensité de l’aléa.
Néanmoins, lorsque l’aléa est trop intense, ces mesures ne suffisent pas à protéger les
populations. La prévision est alors nécessaire pour anticiper l’apparition de la crue. En
France, une réforme du dispositif de prévision des crues a d’ailleurs été engagée en 2003 à la
suite des crues catastrophiques de l’Aude en 1999 ou du Gard en 2002. Le Service Central
Hydrométéorologique d’Appui à la Prévision des Inondations (SCHAPI) créé en 2003
supervise désormais la prévision des crues sur toute la France. Il coordonne 22 Services de
Prévision des Crues (SPC) remplaçant les 52 Services d’Annonce de Crues (SAC)
préexistants. En collaboration avec ces SPC et Météo-France, le SCHAPI propose depuis
2006 une carte de vigilance « crue » sur les cours d’eau réglementaires disponible sur internet
et réactualisée 2 fois par jour. Malgré ces avancées, la prévision de crues « éclair » touchant
de petits bassins versants reste difficile. La modélisation et la prévision de ces crues en milieu
méditerranéen constituent d’ailleurs un axe de recherche important comme en témoignent
notamment les thèses de Gaume (2002), Borrell-Estupina (2004), Ayral (2005), Marchandise
(2007) ou Moulin (2007), Audard-Vincendon (2010), Fouchier (2010). Cette thèse s’inscrit
également dans ce contexte de prévision des crues « éclair ». L’objectif de ce travail est dans
un premier temps de valider un modèle pluie-débit sur un petit bassin versant karstique
méditerranéen, le bassin du Lez (114 km2) soumis à des crues « éclair ». On se demandera
notamment si un modèle distribué pluie-débit événementiel et parcimonieux peut reproduire
les crues « éclair » d’un bassin versant karstique ? Existe-t-il des indicateurs pertinents de
l’état hydrique du bassin qui permettent l’initialisation de ce modèle événementiel ? Quel est
l’apport des images de pluie radar à fine résolution spatiale sur la modélisation hydrologique
INTRODUCTION GENERALE
- 9 -
distribuée ? Dans un deuxième temps, et pour réduire les incertitudes liées à la modélisation
pour des applications opérationnelles de prévision, l'objectif de ce travail est d'analyser
l'apport de l'assimilation des débits observés. Quelle composante du modèle hydrologique la
méthode d’assimilation de données doit-elle corriger : condition initiale, paramètres, entrées
du modèle ? Quelle est l’efficacité de cette correction ? Quelles sont ses limites ? Ce travail de
thèse s’est ainsi attaché à apporter des éléments de réponse à ces questions scientifiques et
méthodologiques, soutenu par un programme régional de recherche sur le bassin du Lez, le
projet « Lez Gestion Multi-Usages »3.
Organisation du mémoire
Ce manuscrit est composé de six chapitres organisés en trois parties.
La première partie situe le contexte scientifique dans lequel s’inscrit ce travail de
thèse. Le chapitre 1 résume les connaissances actuelles sur les processus hydrologiques
susceptibles d’intervenir dans la formation des crues « éclair » et présente les notions de
modélisation qui permettent de justifier le choix du type de modèle hydrologique utilisé pour
le bassin du Lez. Le chapitre 2 traite de l’assimilation de données et décrit son principe, ses
méthodes et son utilisation en hydrologie.
La deuxième partie présente le site d’étude. Le chapitre 3 propose une synthèse de la
structure et du fonctionnement de l’hydrosystème du Lez ainsi qu’un résumé de quelques
études scientifiques dont il a pu faire l’objet. Le chapitre 4 présente une première analyse des
données utilisées pour ce travail de thèse, correspondant à plus d'une vingtaine d'épisodes
averse-crue sur la période 1994-2008.
La troisième partie contient le cœur de ce travail de thèse dédié à l’application du
modèle hydrologique et de la technique d’assimilation au bassin versant du Lez. Le chapitre 5
évalue les performances du modèle choisi pour simuler les débits, la possibilité d'initialiser le
modèle en fonction de différents indicateurs de l'état hydrique du système, et sa capacité à
reproduire l’état hydrique de l’hydrosystème au cours de l’épisode de crue. Le chapitre 6
analyse la capacité de la procédure d’assimilation de données à améliorer la prévision des
débits dans différents cas, en utilisant les premiers débits observés à l’exutoire du bassin pour
modifier les paramètres les plus sensibles ou les forçages pluviométriques du modèle
hydrologique. Ce chapitre examine enfin les limites de ce type de correction.
3 Le projet Lez Gestion Multi Usages est porté par le BRGM, financé par l’agglomération de Montpellier,
l’AERM&C, le Conseil Général de l’Hérault, le Conseil Régional du Languedoc Roussillon, la DIREN et le
BRGM) avec pour partenaires scientifiques le BRGM, HSM, G-EAU, le CERFACS, BIOTOPE et TETIS (2008
– 2012)

CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 11 -
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET
MODELISATION HYDROLOGIQUE
Ce chapitre replace le travail de cette thèse dans le contexte des crues
méditerranéennes et de leur simulation. On analysera tout d’abord les processus dominants
impliqués dans la genèse et la propagation de ces crues (section 1). On présentera ensuite les
outils qui permettent de les représenter (section 2). Des analyses bibliographiques similaires
existent dans la littérature (Gaume, 2002 ; Borrell-Estupina, 2004 ; Ayral 2005 ; Le Lay,
2006). Le lecteur intéressé pourra s’y référer pour des informations complémentaires.
1. Processus impliqués dans les crues d’un bassin versant
1.1. La crue : réponse hydrologique d’un bassin versant
Après avoir rappelé les notions de bassin versant et de réponse hydrologique, cette
section 1 s’intéresse aux processus impliqués dans les crues méditerranéennes et à la difficulté
d’observer ce phénomène.
1.1.1. Qu’est-ce qu’un bassin versant ?
L’hydrologie est la science de l’étude du cycle de l’eau. Sur les continents, celui-ci se
résume essentiellement à la circulation de l’eau dans les compartiments que sont le sol ou le
sous-sol, la biosphère et l’atmosphère et à des échanges d’eau entre ces différents
compartiments. Pour analyser le cycle hydrologique et ses effets, notamment l’évolution des
débits d’une rivière, les hydrologues définissent une unité géographique appelé le bassin
versant. Il s’agit d’un système correspondant à « une surface hydrologiquement close » [Musy
et Higy, 2004]. Ainsi, en une section droite d’un cours d’eau, le bassin versant correspond à
l’ensemble de la surface qui contribue à l’écoulement de la dite section [Hubert, 2003]. Le
bassin versant est défini par son exutoire (la section droite du cours d’eau) et délimité par la
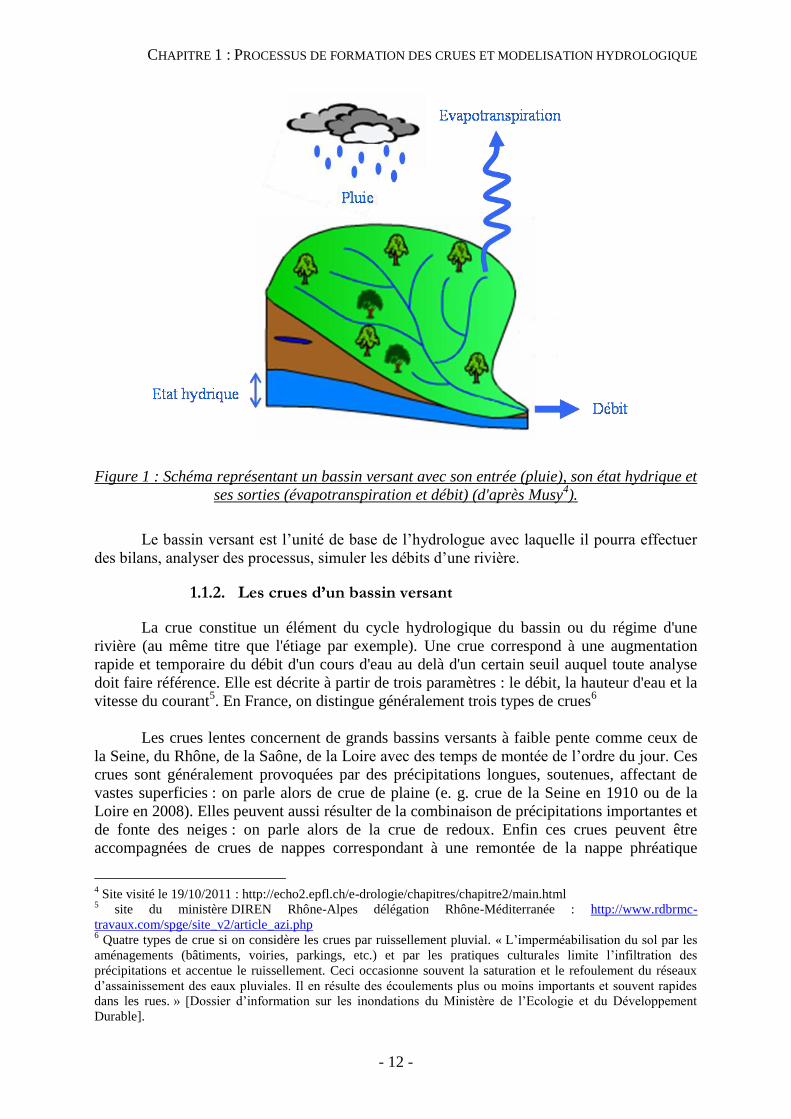
ligne de partage des eaux. Il est caractérisé par (figure 1) :
- ses entrées (les précipitations),
- sa géométrie (pentes des versants), sa composition (géologie, pédologie,
occupation des sols) et ses limites (lignes de partage des eaux),
- ses états internes (humidité des sols, piézométrie),
- ses sorties (évapotranspiration, débit à l’exutoire du bassin).
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 12 -
Figure 1 : Schéma représentant un bassin versant avec son entrée (pluie), son état hydrique et
ses sorties (évapotranspiration et débit) (d'après Musy4).
Le bassin versant est l’unité de base de l’hydrologue avec laquelle il pourra effectuer
des bilans, analyser des processus, simuler les débits d’une rivière.
1.1.2. Les crues d’un bassin versant
La crue constitue un élément du cycle hydrologique du bassin ou du régime d'une
rivière (au même titre que l'étiage par exemple). Une crue correspond à une augmentation
rapide et temporaire du débit d'un cours d'eau au delà d'un certain seuil auquel toute analyse
doit faire référence. Elle est décrite à partir de trois paramètres : le débit, la hauteur d'eau et la
vitesse du courant5. En France, on distingue généralement trois types de crues
6
Les crues lentes concernent de grands bassins versants à faible pente comme ceux de
la Seine, du Rhône, de la Saône, de la Loire avec des temps de montée de l’ordre du jour. Ces
crues sont généralement provoquées par des précipitations longues, soutenues, affectant de
vastes superficies : on parle alors de crue de plaine (e. g. crue de la Seine en 1910 ou de la
Loire en 2008). Elles peuvent aussi résulter de la combinaison de précipitations importantes et
de fonte des neiges : on parle alors de la crue de redoux. Enfin ces crues peuvent être
accompagnées de crues de nappes correspondant à une remontée de la nappe phréatique
4 Site visité le 19/10/2011 : http://echo2.epfl.ch/e-drologie/chapitres/chapitre2/main.html
5 site du ministère DIREN Rhône-Alpes délégation Rhône-Méditerranée : http://www.rdbrmc-
travaux.com/spge/site_v2/article_azi.php 6 Quatre types de crue si on considère les crues par ruissellement pluvial. « L’imperméabilisation du sol par les
aménagements (bâtiments, voiries, parkings, etc.) et par les pratiques culturales limite l’infiltration des
précipitations et accentue le ruissellement. Ceci occasionne souvent la saturation et le refoulement du réseaux
d’assainissement des eaux pluviales. Il en résulte des écoulements plus ou moins importants et souvent rapides
dans les rues. » [Dossier d’information sur les inondations du Ministère de l’Ecologie et du Développement
Durable].
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 13 -
jusqu’à la surface (e. g. crue de l’Oise en 1995 ou de la Somme en 2001) [http://www.risques-
meteo.ac-versailles.fr/Crues-lentes]. La lenteur de ce phénomène laisse suffisamment de
temps généralement pour alerter la population.
Les crues rapides se produisent sur des bassins versants de plus petite taille au relief
plus marqué. La montée des eaux est plus rapide, inférieure à la journée. La DIREN Rhône-
Alpes considère un temps de montée des eaux inférieur à 12h pour qualifier une crue rapide.
Dans sa thèse, Moulin (2007) définit une crue rapide comme une crue ayant « une formation
et une évolution rapide […], avec des temps caractéristiques (temps de réponse, temps de
montée, temps de concentration, temps de propagation) inférieurs à 24 heures ». Elles peuvent
atteindre des débits de pointes importants et sont plus difficiles à prévoir (e.g. l’Ardèche en
1992).
Les crues torrentielles, appelées aussi crues « éclair », soudaines ou brutales
[UNESCO, 1992], se produisent sur de petits bassins versants et sont provoquées par des
pluies intenses (e.g. Grand Bornand en 1987 avec un débit de pointe de 200 m3/s pour un
bassin de 60 km2). Leur temps de montée est très court (quelques heures) et leur débit de
pointe « relativement élevé » [UNESCO, 1992]. Comme l’ont montré Borrell-Estupina (2005)
et Moulin (2007) dans leur thèse, cette définition reste très qualitative. Les critères
quantitatifs, notamment le temps de montée, permettant de distinguer les crues rapides des
crues « éclair » varient selon les auteurs et selon les pays. En effet, au Royaume-Uni, les crues
éclair ont un temps de montée inférieur à 3 heures sur des bassins de 5 à 10 km2 alors qu’aux
Etats-Unis, le temps de montée peut aller jusqu’à 6 heures pour des bassins de 400 km2
[Georgakakos and Hudlow, 1984 ; Collier, 2007]. Dans leur analyse des crues « éclair » à
travers l’Europe, Marchi et al. (2010) utilisent un échantillon de crues touchant des bassins
dont la superficie varie de 9.5 à 1856 km2 et le temps de réponse est souvent (donc pas
toujours) inférieur à 6 heures. La distinction entre crue « éclair » et crue rapide reste donc
floue. Dans cette thèse, seule une distinction entre crues lentes et crues rapides ou « éclair »
sera faite, les crues rapides comprenant le cas particulier des crues « éclair ».
1.1.3. Les crues rapides ou « éclair »
En Europe, les crues « éclair » se produisent principalement en automne dans le nord
de l’Italie (région méditerranéenne alpine), en Catalogne, dans le sud-est de la France. Elles
peuvent également survenir en Autriche, Slovénie, Slovaquie, Roumanie, et se produisent
dans ce cas à la fin du printemps et en été [Gaume et al., 2009]. En Méditerranée occidentale,
le maximum de fréquence d’occurrence des événements fortement précipitants a lieu de
septembre à décembre au moment où la mer est chaude [Boudevillain et al., 2009]. Celle-ci va
humidifier et réchauffer les basses couches de l’atmosphère alors qu’un flux d’altitude
provenant généralement du nord ou nord-ouest va amener de l’air froid [Audard-Vincendon,
2010]. La création d’une instabilité peut alors donner naissance à des épisodes pluvieux
importants. Ceux-ci ont généralement une extension spatiale et une durée plus importantes
qu’en région continentale. Les crues qui en résultent sont aussi plus intenses [Marchi et al.,
2010]. Ces crues touchent généralement des bassins de petite et moyenne taille qui
représentent plus de la moitié de la superficie du pourtour méditerranéen [Audard-Vincendon,
2010]. Leur intensité peut être fortement conditionnée par les conditions antécédentes
d’humidité des bassins [Borga et Gaume, 2009 ; Gaume et al., 2009 ; Marchi et al., 2010]. La
connaissance du comportement de ces bassins et les observations disponibles lors de ces crues
sont encore limitées en raison de la rapidité et de la violence du phénomène [Gaume, 2002 ;
Borrell-Estupina, 2004 ; Moulin, 2007]. Les dégâts occasionnés pour ces épisodes de crue
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 14 -
peuvent être importants tant sur le plan matériel que sur le plan humain : 3.3 G€ pour l’Aude
en 1999 [Lefrou et al., 2000 in Gaume et al., 2009] et 36 victimes, 1.2 G€ pour le Gard en
2002 [Huet et al., 2003 in Gaume et al., 2009] et 24 victimes. Les pays de la rive sud de la
Méditerranée ne sont pas épargnés : en avril 2007 de fortes pluies touchant l’Algérie, la
Tunisie et le Maroc ont causé la mort de 22 personnes lors de crues « éclair »7. Plus
récemment, dans la région d’El El-Bayadh à 700 km au Sud-Ouest d’Alger, des « pluies,
tombant sur des sols secs, ont provoqué des inondations « éclair » qui ont emporté des ponts
et des routes et détruit des centaines d'habitations » causant également la mort de 10
personnes.
1.2. Les processus de formation des crues
Cette section présente un aperçu des principaux processus pouvant être impliqués dans
les crues rapides méditerranéennes.
1.2.1. La pluie
Les précipitations constituent théoriquement l’unique apport d’eau du bassin versant.
On distingue généralement deux types de précipitations :
- les précipitations stratiformes de faible intensité et longue durée touchant de vastes
étendues,
- les précipitations convectives de forte intensité et faible durée touchant de plus
petites surfaces.
Contrairement aux précipitations stratiformes, les précipitations convectives sont
caractérisées par une variabilité spatiale et temporelle importante. Ces pluies intenses peuvent
correspondre à la formation d’un système convectif de méso-échelle, MCS (quelques
centaines de km2). Ces systèmes sont quasi-stationnaires [Rivrain, 1997] et peuvent prendre
une forme de V. Les cellules orageuses naissent à la pointe du V puis se déplacent vers
l’arrière du système. Dans d’autres situations, le relief peut aussi jouer un rôle important dans
le déclenchement des épisodes pluvieux intenses. C’est le cas des pluies orographiques
notamment des épisodes cévenols. Une illustration de ces deux types de précipitations (en
forme de V et orographique) est présentée au chapitre 3 (section 1.4), présentant le site
d’étude.
1.2.2. Le ruissellement direct
Etant donnée la rapidité des crues méditerranéennes, un ruissellement direct (ou
ruissellement de surface) sur une grande partie du bassin peut être considéré pour expliquer la
formation de ces crues. On distingue deux types de ruissellement différents en fonction de
leur mécanisme de formation (figure 2).
7 entreprise.meteofrance.com/content/2011/0/24622-48.pdf.

CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 15 -
Figure 2 : Schéma illustrant la génération du ruissellement par saturation par le haut
(ruissellement hortonien ou saturation par le bas (ruissellement sur surfaces saturées)
(d’après MUSY8).
Le ruissellement hortonien (Hortonian ou infiltration excess runoff) se produit lorsque
l’intensité de la pluie dépasse la capacité d’infiltration des sols. On parle de saturation par le
haut ou de refus à l’infiltration. Ce type de ruissellement se forme pour des intensités de
pluies importantes et sur des sols imperméables ou très peu perméables. Il est généralement
évoqué pour expliquer les crues se produisant sur les bassins versants situés en milieu aride
ou semi-aride [Albergel et al., 2003 ; Descroix et al., 2007]. L’absence de végétation à la
surface de ces sols peut favoriser la formation du ruissellement hortonien par la création d’une
croûte de battance9. Celle-ci se forme par destruction mécanique et chimique de la surface du
sol sous l’impact des gouttes de pluies. Les pores superficiels du sol se comblent peu à peu ce
qui fait chuter les vitesses d’infiltration. En ralentissant la vitesse de chute des gouttes de
pluie, la végétation diminue l’impact de ces gouttes sur le sol et empêche ainsi la formation
d’une telle croûte [Ellison, 1945 in Gaume, 2002].
Le ruissellement sur surfaces saturées (Dunnian ou saturation excess runoff) se produit
lorsque le profil vertical de sol est saturé. On parle de saturation par le bas. Cette saturation
peut se faire verticalement par la pluie incidente [Dunne et Black, 1970] ou horizontalement
par une répartition des écoulements dans les sols au cours de la crue [Darboux et al., 2002].
Une fois la saturation atteinte, le ruissellement sur les surfaces saturées est total. Ces dernières
se trouvent généralement au fond des vallées, près des cours d’eau ou peuvent aussi apparaître
sur des versants à des endroits où le sol est peu profond [Cosandey, 1994]. L’évolution spatio-
temporelle de ces surfaces saturées contrôle l’évolution du ruissellement au cours de la crue.
Ce type de ruissellement peut expliquer les crues observées en climat tempéré, là où
l’intensité de pluie est inférieure à la capacité d’infiltration des sols.
Le ruissellement hortonien a longtemps été invoqué pour expliquer la formation des
crues rapides méditerranéennes, compte tenu des intensités importantes des précipitations.
8 Site visité le 19/10/2011 : http://echo2.epfl.ch/e-drologie/chapitres/chapitre10/main.html
9 La croûte de battance est une couche dense et dure à la surface du sol, formée par désagrégation du sol sous
l’action de la pluie.
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 16 -
Gaume (2002) suggère que « le ruissellement hortonien ou la battance peuvent cependant
jouer un rôle majeur dans les genèses des crues éclair ». Albergel et al. (2003) montrent à
travers divers exemples choisis en climat semi-aride tropical (Burkina Faso et Sénégal) et
méditerranéen (Tunisie et sud de la France) que le processus de ruissellement hortonien
semble dominer. Il apparaît maintenant que pour des sols suffisamment filtrants et épais pour
absorber plusieurs dizaines, voire centaines de mm de pluie, le ruissellement par saturation
peut être à l'origine des crues. Ce type de processus affecterait principalement les versants à
substrat granitique ou schisteux, Mont-Lozère [Cosandey, 1994], Gardon d'Anduze [Bouvier
et al., 2006]. D’autres études [Gresillon et Taha, 1998] semblent également conclure que dans
les conditions méditerranéennes, les crues peuvent se former par développement de surfaces
saturées au voisinage des cours d’eau. Les deux types de ruissellement (hortonien ou sur
surfaces saturées) peuvent donc être invoqués pour expliquer la formation des crues rapides
méditerranéennes.
1.2.3. Autres processus susceptibles d'intervenir dans la formation des crues
Des études géochimiques ont montré que dans certaines conditions, l’eau venant du
sol est prédominante dans la formation de la crue [Kienzler et Naef, 2008]. C'est le cas par
exemple pour le bassin versant de la Haute-Mentue en Suisse [Joerin et al., 2005] ou pour
celui de Weatherley en Afrique du Sud [Wenninger et al., 2008]. L’eau stockée dans les sols
peut donc participer à la montée de crue. Plusieurs mécanismes peuvent expliquer cette
participation importante de l'eau des sols observée sur certains bassins versants.
Un transit (transfert de masse) de l’eau plus rapide le long des versants serait possible
grâce à la présence d’horizons superficiels (humus et horizon racinaire) plus perméables que
le reste du profil de sol. Leur plus forte perméabilité permettrait la formation d’une nappe
perchée et le déclenchement d’un écoulement hypodermique (interflow). Ce dernier
expliquerait la formation des crues du bassin de Weatherley en Afrique du Sud [Wenninger et
al., 2008]. Ce type d’écoulement a aussi été observé sur des bassins versants méditerranéens.
Des expérimentations in-situ réalisées sous pluie simulée sur des sols schisteux du bassin du
Gardon d’Anduze [Ayral, 2005] ont mis en évidence un écoulement hypodermique non
négligeable (de 10 à 50 % du ruissellement selon la parcelle). Cet écoulement peut être
facilité par la présence de macropores. Ces derniers correspondent à des pores pour lesquels la
capillarité est inexistante. Ils sont généralement formés par la faune du sol et les racines des
végétaux. Ce sont aussi ces écoulements préférentiels dans les macropores qui expliqueraient
la prédominance des eaux venant du sol dans la formation des crues du bassin de Haute
Mentue en Suisse [Joerin et al., 2005].
A proximité des cours d’eau, le transit de l’eau peut s’accélérer grâce à l’
« intumescence de nappe ». Ce processus d'écoulement correspond à un soulèvement rapide
de la nappe aux endroits où elle est peu profonde, généralement en bas de versant, près du
cours d’eau. Cette intumescence entraîne une augmentation du gradient de charge hydraulique
de la nappe augmentant ainsi la participation des eaux s’écoulant dans le sol à la crue [Musy
et Higy, 2004]. Ce phénomène ne semble prédominant que pour des crues présentant de
faibles coefficients d’écoulement et provoquées par des pluies de courte durée. Pour les crues
méditerranéennes dont cette thèse fait l’objet, ce processus paraît
« relativement anecdotique » [Gaume, 2002].
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 17 -
Un transfert (de pression) peut aussi expliquer la participation rapide des eaux du sol à
la crue. Il s’agit d’un processus d’ « effet piston ». Une impulsion d’eau reçue par le versant
provoque l’exfiltration immédiate de l’eau contenue dans le sol en bas du versant. Autrement
dit, l’eau qui s’infiltre à travers le sol le long des versants pousse l’eau de la nappe de
« versant » qui s’exfiltre en bas du versant [Lischeid et al., 2002].
1.2.4. L’écoulement souterrain en milieu karstique
Le terme « karst » a été utilisé dès le XIXème siècle pour désigner d’abord les massifs
calcaires des Balkans, présentant les mêmes caractéristiques hydrographiques et
morphologiques, avant d’être généralisé à toutes les régions carbonatées présentant une
hydrologie et une morphologie comparables [Roux, J.C., 2006 ; Ford and Williams, 2007]. De
manière générale, le karst est un paysage qui se développe dans des formations susceptibles
d’être dissoutes par l’eau, le plus souvent des roches carbonatées (calcaires et dolomies) mais
aussi des évaporites (gypse, halite, …). Il se forme par « karstification ». Ce phénomène
comprend une phase d’acidification de l’eau de pluie au contact du sol, puis une phase de
dissolution de la roche soluble (carbonate ou évaporite) par l’eau devenue acide. Il en résulte
de nombreuses figures ou indices de karstification caractéristiques de ce milieu comme les
dolines, les avens ou les poljés. Ces figures de karstification, permettent une infiltration rapide
et importante de l’eau de pluie limitant l’existence du ruissellement et celle de cours d’eau
pérennes. Ce sont ces figures qui permettent une interaction « surface-souterrain » importante.
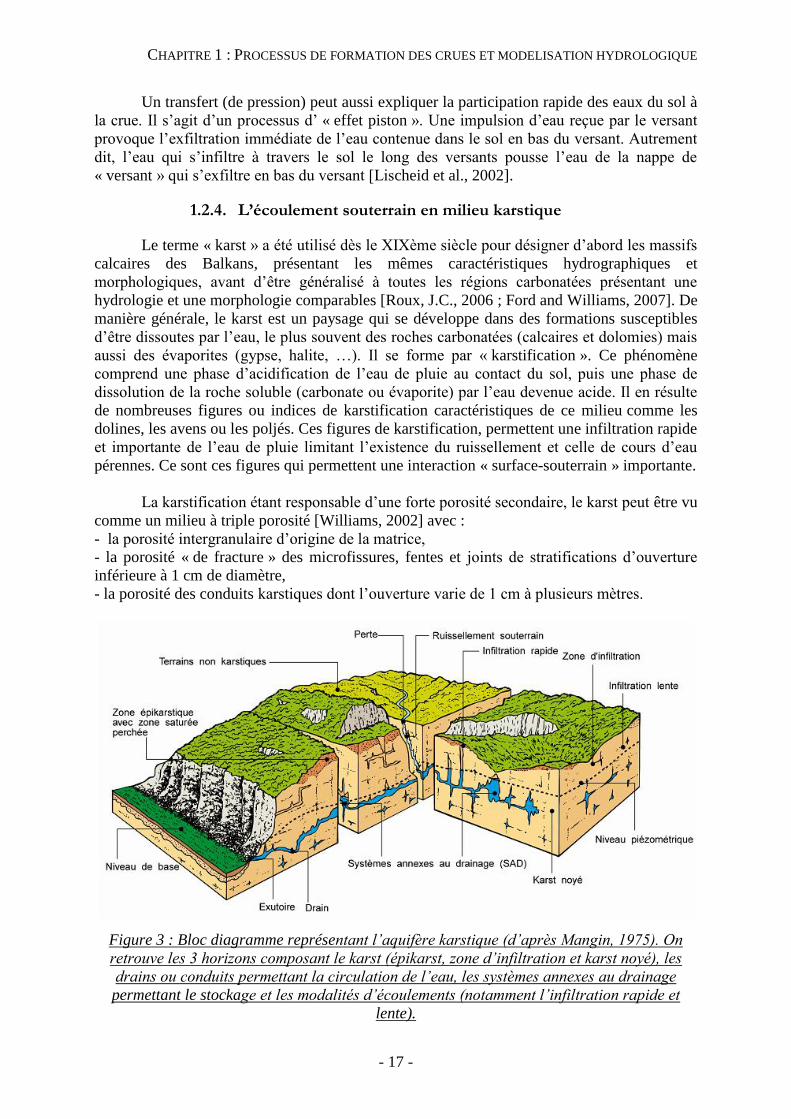
La karstification étant responsable d’une forte porosité secondaire, le karst peut être vu
comme un milieu à triple porosité [Williams, 2002] avec :
- la porosité intergranulaire d’origine de la matrice,
- la porosité « de fracture » des microfissures, fentes et joints de stratifications d’ouverture
inférieure à 1 cm de diamètre,
- la porosité des conduits karstiques dont l’ouverture varie de 1 cm à plusieurs mètres.
Figure 3 : Bloc diagramme représentant l’aquifère karstique (d’après Mangin, 1975). On
retrouve les 3 horizons composant le karst (épikarst, zone d’infiltration et karst noyé), les
drains ou conduits permettant la circulation de l’eau, les systèmes annexes au drainage
permettant le stockage et les modalités d’écoulements (notamment l’infiltration rapide et
lente).
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 18 -
D’un point de vue hydrogéologique, le karst peut constituer un aquifère c’est-à-dire un
ensemble de formations géologiques qui contient de l’eau et dans lequel l’eau circule de façon
suffisante pour être exploitée. On parle alors d’aquifère karstique (figure 3). Il peut alors être
décomposé en 3 horizons : l’épikarst, la zone non saturée (appelée aussi zone d’infiltration) et
la zone saturée (appelée aussi zone noyée ou phréatique).
D’abord évoqué par Mangin (1975), l’épikarst est la zone supérieure altérée du karst
d’épaisseur variable (entre 5 et 30 m selon Klimchouk et al., 2004) en contact avec
l’atmosphère ou recouvert par du sol à certains endroits [Williams, 2008]. Il est le résultat de
l’action combinée du relâchement des contraintes, de l’altération et de la dissolution. Il
possède ainsi une porosité (2 à 10% sur le Lez selon Gouisset, 1981) et une perméabilité plus
élevées comparées aux 2 zones sous-jacentes [Klimchouk et al., 2004]. Ce contraste de
porosité et de perméabilité permet à l’épikarst de stocker temporairement l’eau, de différer
son infiltration et de séparer l’infiltration en 2 composantes : l’une rapide et l’autre lente.
La zone non saturée est la zone où l’écoulement se fait majoritairement de façon
verticale par les microfissures, les fentes ou les joints de stratification (infiltration lente) et par
les conduits verticaux (infiltration rapide).
La zone saturée est celle où l’écoulement se fait majoritairement de façon horizontale.
Les fonctions de stockage et de circulation sont séparées. L’eau est stockée dans la matrice
microfissurée ou dans de grosses cavités appelées systèmes annexes au drainage. Elle circule
à travers un réseau de drainage (ensemble de conduits) hiérarchisé convergeant vers un
exutoire, la source karstique.
A l’échelle mondiale, les formations susceptibles d’être karstifiées couvrent 40
millions de km2, soit environ 10% des surfaces émergées. Les principales régions karstiques
du monde sont : l’Extrême-Orient avec la Chine (1.2 million de km2) et l’ensemble carbonaté
de Chine du sud, du nord du Vietnam et de la Thaïlande (environ 2 millions de km2),
l’Amérique du Nord (Etats-Unis 1.4 million de km2) et centrale ceinture carbonatée du Golfe
du Mexique (500 000 km2), l’Europe (3 millions de km
2) avec notamment sa ceinture
méditerranéenne [Bakalowicz, 1996]. En France, les affleurements carbonatés couvrent
180 000 km2 soit environ 33 % du territoire et couvrent 40 000 km
2 du territoire
d’intervention de l’Agence Rhône-Méditerranée-Corse [Albinet, 1996]. Les bassins versants
méditerranéens peuvent donc présenter une partie karstique non négligeable (Vidourle,
Hérault, Lez, Cesse…). Les propriétés particulières de ces milieux peuvent permettre aux
écoulements souterrains dont ils sont le siège de participer de façon non négligeable aux crues
de surface. L’étude d’une crue de Marina Bay en Croatie en décembre 2004 illustre les
mécanismes de participation du karst aux crues rapides de surface [Bonacci et al., 2006].
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 19 -
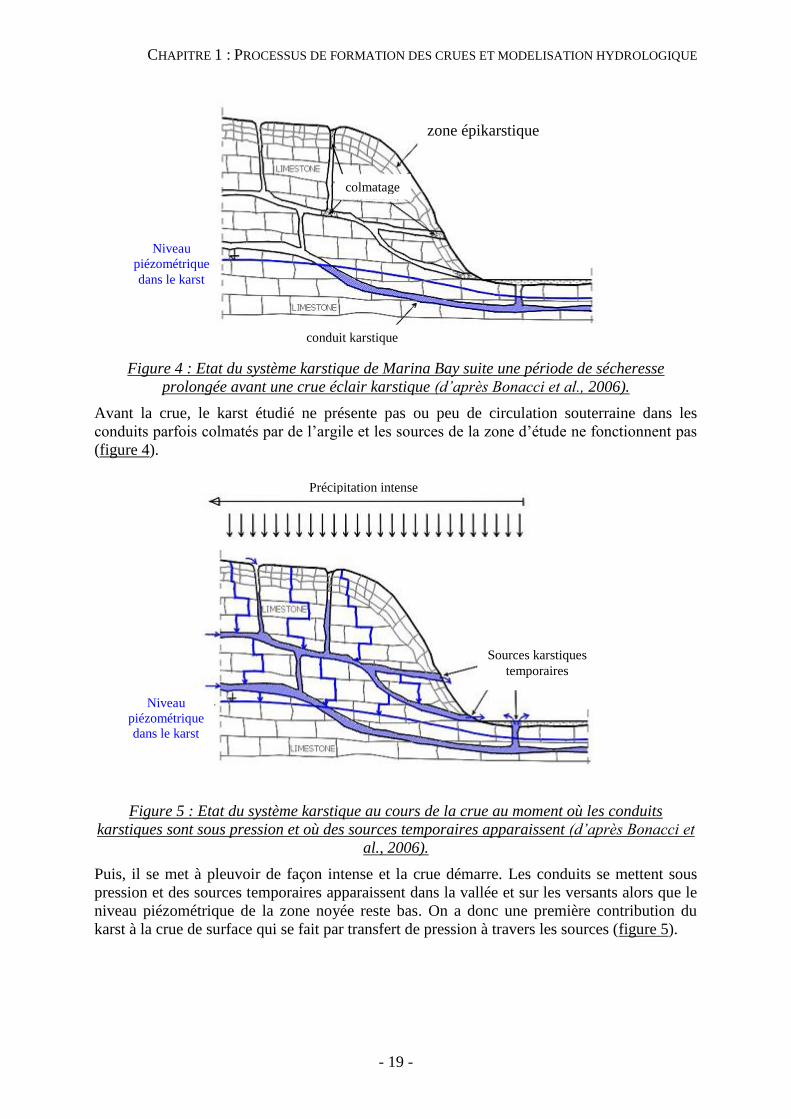
Figure 4 : Etat du système karstique de Marina Bay suite une période de sécheresse
prolongée avant une crue éclair karstique (d’après Bonacci et al., 2006).
Avant la crue, le karst étudié ne présente pas ou peu de circulation souterraine dans les
conduits parfois colmatés par de l’argile et les sources de la zone d’étude ne fonctionnent pas
(figure 4).
Figure 5 : Etat du système karstique au cours de la crue au moment où les conduits
karstiques sont sous pression et où des sources temporaires apparaissent (d’après Bonacci et
al., 2006).
Puis, il se met à pleuvoir de façon intense et la crue démarre. Les conduits se mettent sous
pression et des sources temporaires apparaissent dans la vallée et sur les versants alors que le
niveau piézométrique de la zone noyée reste bas. On a donc une première contribution du
karst à la crue de surface qui se fait par transfert de pression à travers les sources (figure 5).
zone épikarstique
colmatage
Niveau
piézométrique
dans le karst
conduit karstique
Sources karstiques
temporaires
Précipitation intense
Niveau
piézométrique
dans le karst
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 20 -
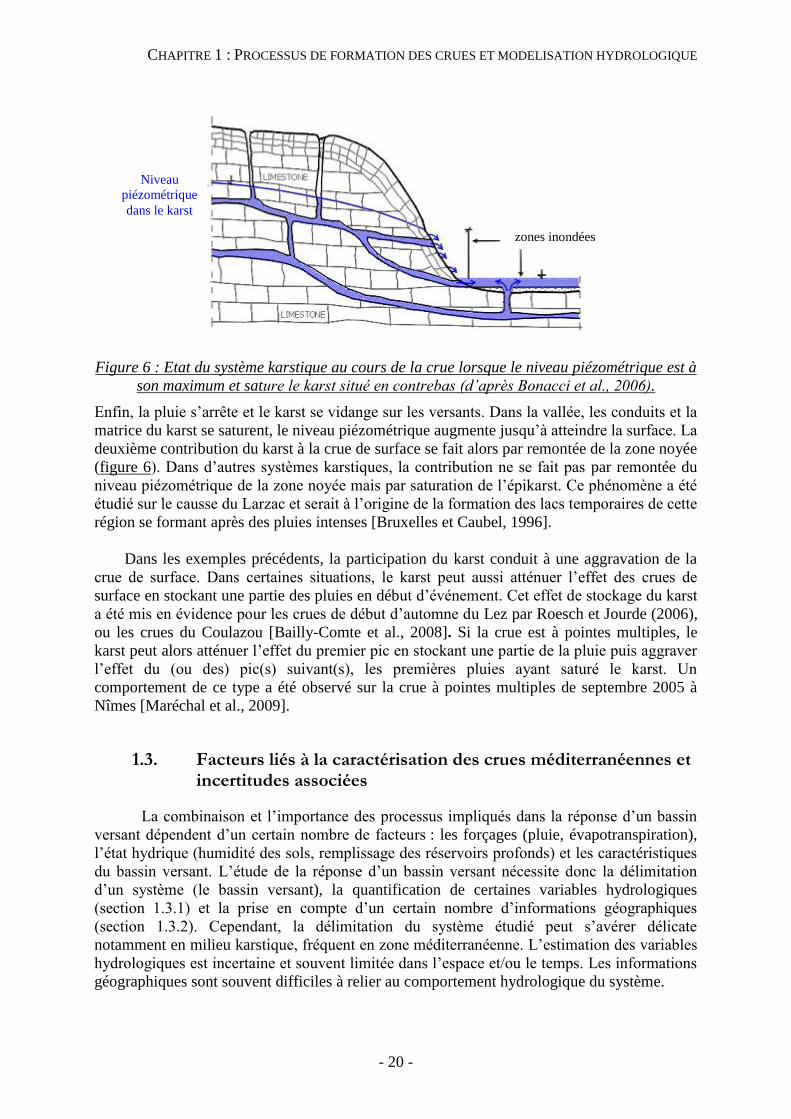
Figure 6 : Etat du système karstique au cours de la crue lorsque le niveau piézométrique est à
son maximum et sature le karst situé en contrebas (d’après Bonacci et al., 2006).
Enfin, la pluie s’arrête et le karst se vidange sur les versants. Dans la vallée, les conduits et la
matrice du karst se saturent, le niveau piézométrique augmente jusqu’à atteindre la surface. La
deuxième contribution du karst à la crue de surface se fait alors par remontée de la zone noyée
(figure 6). Dans d’autres systèmes karstiques, la contribution ne se fait pas par remontée du
niveau piézométrique de la zone noyée mais par saturation de l’épikarst. Ce phénomène a été
étudié sur le causse du Larzac et serait à l’origine de la formation des lacs temporaires de cette
région se formant après des pluies intenses [Bruxelles et Caubel, 1996].
Dans les exemples précédents, la participation du karst conduit à une aggravation de la
crue de surface. Dans certaines situations, le karst peut aussi atténuer l’effet des crues de
surface en stockant une partie des pluies en début d’événement. Cet effet de stockage du karst
a été mis en évidence pour les crues de début d’automne du Lez par Roesch et Jourde (2006),
ou les crues du Coulazou [Bailly-Comte et al., 2008]. Si la crue est à pointes multiples, le
karst peut alors atténuer l’effet du premier pic en stockant une partie de la pluie puis aggraver
l’effet du (ou des) pic(s) suivant(s), les premières pluies ayant saturé le karst. Un
comportement de ce type a été observé sur la crue à pointes multiples de septembre 2005 à
Nîmes [Maréchal et al., 2009].
1.3. Facteurs liés à la caractérisation des crues méditerranéennes et incertitudes associées
La combinaison et l’importance des processus impliqués dans la réponse d’un bassin
versant dépendent d’un certain nombre de facteurs : les forçages (pluie, évapotranspiration),
l’état hydrique (humidité des sols, remplissage des réservoirs profonds) et les caractéristiques
du bassin versant. L’étude de la réponse d’un bassin versant nécessite donc la délimitation
d’un système (le bassin versant), la quantification de certaines variables hydrologiques
(section 1.3.1) et la prise en compte d’un certain nombre d’informations géographiques
(section 1.3.2). Cependant, la délimitation du système étudié peut s’avérer délicate
notamment en milieu karstique, fréquent en zone méditerranéenne. L’estimation des variables
hydrologiques est incertaine et souvent limitée dans l’espace et/ou le temps. Les informations
géographiques sont souvent difficiles à relier au comportement hydrologique du système.
zones inondées
Niveau
piézométrique
dans le karst
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 21 -
1.3.1. Facteurs hydrologiques
Le problème de l’échantillonnage des données
Comme on l’a vu dans la section 1.1.3., les bassins versants méditerranéens sont
soumis à des crues rapides dont la violence dépend de l’intensité de la pluie et de l’état
hydrique initial du bassin. Pour étudier la réponse hydrologique de ces bassins, il est donc
nécessaire de mesurer le débit s’écoulant à leur exutoire, l’intensité de pluie qu’ils reçoivent
(à travers des pluviomètres, des pluviographes ou un radar météorologique) et leur état
hydrique (à travers des mesures d’humidité et/ou de piézométrie). La mesure de ces variables
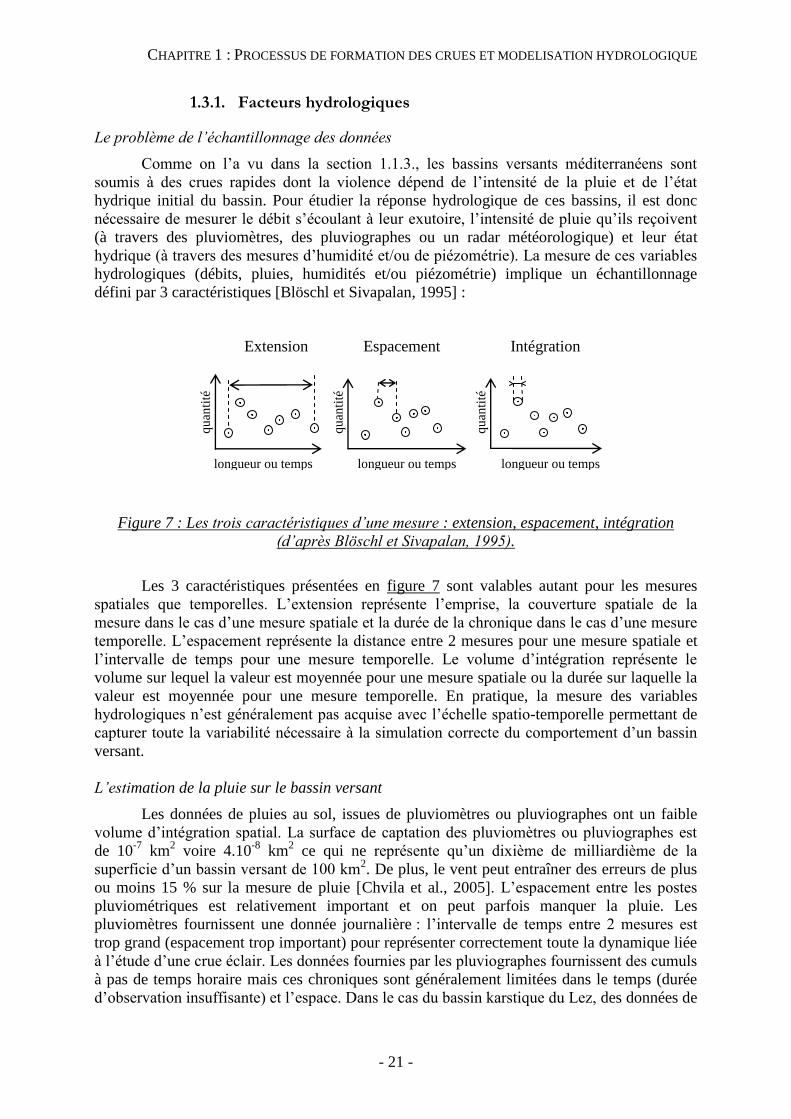
hydrologiques (débits, pluies, humidités et/ou piézométrie) implique un échantillonnage
défini par 3 caractéristiques [Blöschl et Sivapalan, 1995] :
Figure 7 : Les trois caractéristiques d’une mesure : extension, espacement, intégration
(d’après Blöschl et Sivapalan, 1995).
Les 3 caractéristiques présentées en figure 7 sont valables autant pour les mesures
spatiales que temporelles. L’extension représente l’emprise, la couverture spatiale de la
mesure dans le cas d’une mesure spatiale et la durée de la chronique dans le cas d’une mesure
temporelle. L’espacement représente la distance entre 2 mesures pour une mesure spatiale et
l’intervalle de temps pour une mesure temporelle. Le volume d’intégration représente le
volume sur lequel la valeur est moyennée pour une mesure spatiale ou la durée sur laquelle la
valeur est moyennée pour une mesure temporelle. En pratique, la mesure des variables
hydrologiques n’est généralement pas acquise avec l’échelle spatio-temporelle permettant de
capturer toute la variabilité nécessaire à la simulation correcte du comportement d’un bassin
versant.
L’estimation de la pluie sur le bassin versant
Les données de pluies au sol, issues de pluviomètres ou pluviographes ont un faible
volume d’intégration spatial. La surface de captation des pluviomètres ou pluviographes est
de 10-7
km2 voire 4.10
-8 km
2 ce qui ne représente qu’un dixième de milliardième de la
superficie d’un bassin versant de 100 km2. De plus, le vent peut entraîner des erreurs de plus
ou moins 15 % sur la mesure de pluie [Chvila et al., 2005]. L’espacement entre les postes
pluviométriques est relativement important et on peut parfois manquer la pluie. Les
pluviomètres fournissent une donnée journalière : l’intervalle de temps entre 2 mesures est
trop grand (espacement trop important) pour représenter correctement toute la dynamique liée
à l’étude d’une crue éclair. Les données fournies par les pluviographes fournissent des cumuls
à pas de temps horaire mais ces chroniques sont généralement limitées dans le temps (durée
d’observation insuffisante) et l’espace. Dans le cas du bassin karstique du Lez, des données de
longueur ou temps longueur ou temps longueur ou temps
qu
anti
té
qu
anti
té
qu
anti
té
Extension Espacement Intégration
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 22 -
pluies horaires ne commencent qu’à partir de 1994 à la station de Prades alors que des pluies
journalières sont disponibles depuis 1979.
Les précipitations peuvent être estimées de façon indirecte par radar météorologique.
De façon très schématique et simplifiée, le principe du radar est le suivant (pour une
description détaillée, le lecteur peut consulter la thèse de Boudevillain, 2003) : celui-ci émet
une onde électromagnétique qui se propage dans l’atmosphère à la vitesse de la lumière. Une
partie de cette onde est réfléchie, rétrodiffusée par des hydrométéores (gouttes de pluie,
grêlons, flocons…) et revient au radar. Ce dernier mesure alors une réflectivité Z, reliée à
l’intensité de pluie R par la relation qui peut être :
Z = a.Rb
Supposant une distribution du type Marshall et Palmer (1948) pour les hydrométéores. Les
valeurs a et b des coefficients dépendant des caractéristiques de la pluie avec a = 200 et b =
1,6 en général.
Cette estimation des pluies présente l’avantage d’être spatialisée avec un espacement
spatio-temporel suffisant pour capturer la variabilité des pluies intenses à l’origine des crues
méditerranéennes. Néanmoins l’estimation de l’intensité de pluie peut s’avérer incertaine en
raison d’un certain nombre de difficultés décrites dans la thèse de Boudevillain (2003).
Celles-ci peuvent venir d’une propagation anormale du faisceau radar dans l’atmosphère, de
la présence d’échos fixes et d’effets de masques [Smith et al., 1998; Bech et al., 2003], de
problèmes dans l’estimation du profil vertical de réflectivité (PVR) [Kirstetter, 2008] avec
notamment l’apparition de la bande brillante à la traversée de l’isotherme 0°C [Bourrel et al.,
1994], de variations dans la relation Z-R [Chapon, 2006 ; Chapon et al., 2008 ; Alfieri et al.,
2010] ou d’effets liés au vent [Salles et al., 2010]. Pour améliorer l’estimation de l’intensité
de pluie, la donnée de pluie radar est alors comparée et corrigée avec les données de pluie au
sol [Borga, 2002 ; Vieux et Bedient, 2004 ; Chumchean et al., 2006 ; Mapiam et al., 2009].
L’estimation de l’état hydrique du bassin versant
A l’image des données de pluie au sol, les mesures d’humidité des sols sont
ponctuelles (faible volume d’intégration spatial) et éparses (espacement important) donc pas
forcément représentatives de l’humidité du bassin versant. Il en est de même pour les données
piézométriques qui ne représentent pas forcément l’état de remplissage de l’ensemble du
bassin hydrogéologique, surtout dans les milieux karstiques fortement hétérogènes. De plus,
ces chroniques d’humidité ou de piézométrie restent rares et généralement limitées dans le
temps.
L’humidité d’un bassin peut aussi être évaluée de manière indirecte par satellite.
Quesney et al. (2000) proposent d’estimer l’humidité des sols d’un bassin agricole à partir de
mesures satellites ERS/SAR qu’ils corrigent de l’effet de la végétation et de la rugosité du sol.
Ces mesures donnent uniquement accès à la mesure de l’humidité du sol superficiel. La
précision est de plus ou moins 0.04 cm3/cm
3 exceptée en mai et juin ou le couvert végétal est
trop dense pour obtenir une estimation fiable. Cette estimation par satellite permet donc
d’avoir une meilleure représentation spatiale de l’état hydrique du bassin. Néanmoins, la
résolution temporelle ne permet pas de suivre la dynamique de l’état hydrique lors d’une crue
rapide. Ces données doivent également être validées par des mesures effectuées in-situ. Plus
récemment, Albergel et al. (2008) proposent de valider les estimations d’humidité des sols
obtenues par satellites (données ASCAT du satellite METOP-A) par des mesures effectuées
in situ réparties sur 13 stations dans le sud-ouest de la France. Les corrélations entre les
mesures in situ et l’indice d’humidité obtenu à partir des mesures satellites sont significatives
pour 11 des 13 stations testées.
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 23 -
L’estimation du débit
Le débit est la seule variable qui intègre l’ensemble de la réponse du bassin (volume
d’intégration important). Son estimation pouvant se faire au pas de temps horaire, voire
inférieur permet de capturer la variabilité de la crue. Néanmoins son estimation est indirecte et
soumise aux incertitudes liées à la courbe de tarage (permettant de convertir les hauteurs
d’eau mesurées en débits).
Conclusion sur l’estimation des variables hydrologiques
L’estimation des variables hydrologiques est donc délicate. L’acquisition in-situ
permet une estimation relativement précise de la variable hydrologique. De plus, leur
échantillonnage temporel est assez fin pour capturer la dynamique de phénomènes tels que les
crues rapides. Cependant ces estimations sont en général assez locales (volume d’intégration
faible) et éparses (espacement important entre les stations de mesures).
L’estimation indirecte de ces variables permet de capturer la variabilité spatiale de ces
variables hydrométéorologiques. Même si pour l’humidité, la résolution temporelle est encore
assez grossière, celle-ci est assez fine pour les données de pluie radar (estimées toutes les 5
minutes). Enfin, tant pour la pluie que pour l’humidité, ces estimations indirectes doivent
néanmoins être validées et/ou corrigées par des mesures effectuées in situ.
1.3.2. Facteurs géographiques
Deux bassins soumis aux mêmes forçages et présentant le même état hydrique n’auront
pas forcément la même réponse hydrologique. D’autres facteurs vont venir influencer cette
réponse. Il s’agit de la nature et de la géométrie des milieux présents sur le bassin versant.
La nature des milieux présents sur le bassin versant
La géologie peut avoir une influence sur la délimitation du bassin versant [Musy et Higy,
2004]. Les hydrologues considèrent en général la ligne de crête topographique comme la ligne
de partage des eaux qui délimite le bassin versant. Cela suppose que le bassin topographique,
délimité par les crêtes topographiques, et le bassin hydrogéologique, délimité par les crêtes
piézométriques et la géologie, se superposent parfaitement. Cette approximation peut être
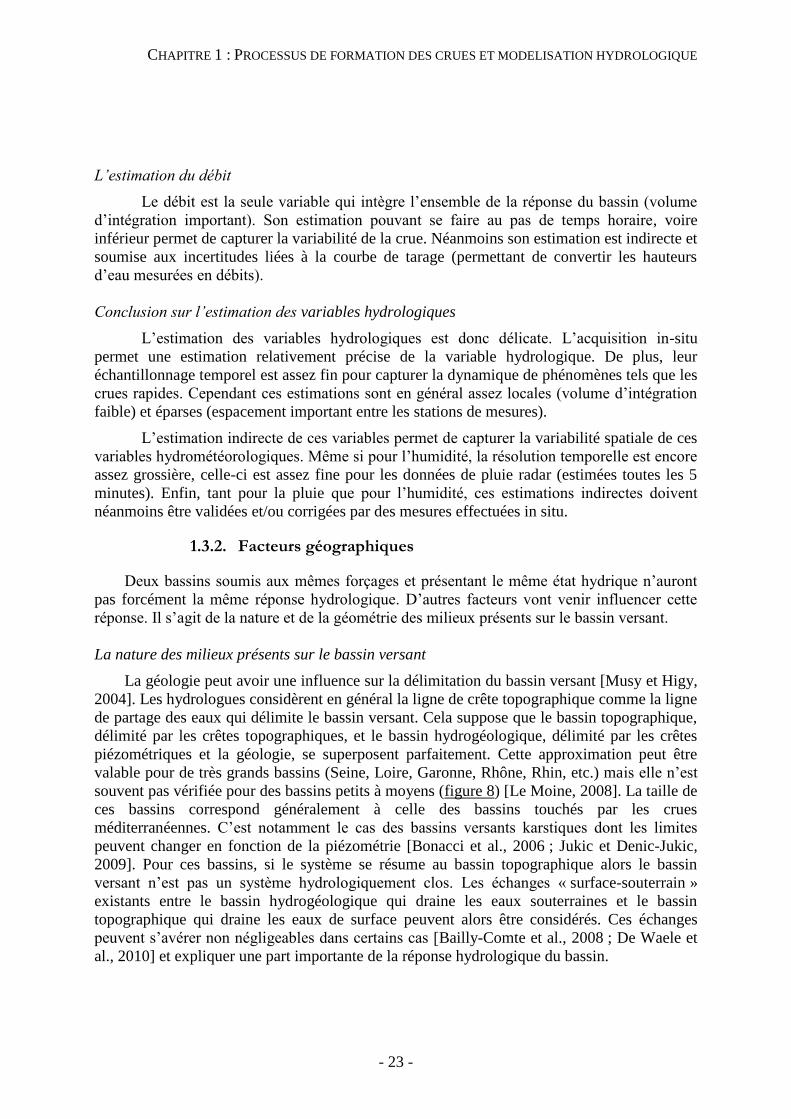
valable pour de très grands bassins (Seine, Loire, Garonne, Rhône, Rhin, etc.) mais elle n’est
souvent pas vérifiée pour des bassins petits à moyens (figure 8) [Le Moine, 2008]. La taille de
ces bassins correspond généralement à celle des bassins touchés par les crues
méditerranéennes. C’est notamment le cas des bassins versants karstiques dont les limites
peuvent changer en fonction de la piézométrie [Bonacci et al., 2006 ; Jukic et Denic-Jukic,
2009]. Pour ces bassins, si le système se résume au bassin topographique alors le bassin
versant n’est pas un système hydrologiquement clos. Les échanges « surface-souterrain »
existants entre le bassin hydrogéologique qui draine les eaux souterraines et le bassin
topographique qui draine les eaux de surface peuvent alors être considérés. Ces échanges
peuvent s’avérer non négligeables dans certains cas [Bailly-Comte et al., 2008 ; De Waele et
al., 2010] et expliquer une part importante de la réponse hydrologique du bassin.
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 24 -
Figure 8 : Diagramme 3D illustrant la non-superposition des bassins topographique et
hydrogéologique pour Yport et Etretat en Pays de Caux (Normandie). YT et YP sont
respectivement les bassins topographique (17 km2) et hydrogéologique (104 km
2) d’Yport, ET
et EP sont respectivement les bassins topographique (145 km2) et hydrogéologique (46 km
2)
d’Etretat (tirée de Le Moine, 2008).
Les cartes géologiques peuvent alors s’avérer utiles pour délimiter le bassin
hydrogéologique. Néanmoins, celles-ci ne suffisent généralement pas et doivent être
complétées par des colorations ou des traçages. C’est le cas notamment du bassin versant du
Lez dont la délimitation du bassin hydrogéologique a nécessité de nombreux traçages et de
nombreuses colorations en plus d’une étude de la géologie.
La géologie va aussi avoir une influence sur le type de sols (pédologie) et la végétation
rencontrés sur le bassin versant. Ces deux facteurs agissent aussi sur la réponse du bassin
[Lavabre et al., 1991 ; Meunier, 1996].
L’occupation des sols peut jouer un rôle important dans la réponse d’un bassin.
L’urbanisation d’un bassin va imperméabiliser une partie du bassin et ainsi augmenter le
ruissellement de surface, processus important à l’origine de crues rapides. La végétation peut
aussi jouer sur le ruissellement. Meunier (1996) compare 2 bassins versants forestiers du sud
est de la France se distinguant uniquement par leur occupation du sol : le taux de dénudation
du bassin du Laval est de 78% alors que celui du Brusquet est de seulement 13%. Il montre
que pour une pluie semblable, le bassin du Laval, plus dénudé, possède une réponse plus
brutale que celle du bassin du Brusquet. Le même type de comportement est observé sur le
bassin versant du Real Collobrier dont la réponse hydrologique devient plus brutale suite à un
incendie ayant touché 80% de sa superficie [Lavabre et al., 1991]. La végétation va pouvoir
jouer sur l’interception à travers la densité et la structure du couvert végétal et
l’évapotranspiration à travers la densité et la profondeur des racines. Même si
l’évapotranspiration et l’interception ne sont pas des processus dominants lors des crues
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 25 -
rapides méditerranéennes, leur rôle est important dans la phase inter-événementielle (période
située entre deux événements de crue). Celle-ci définit l’état hydrique du bassin en début de
crue jouant un rôle capital dans la réponse du bassin. Une carte d’occupation des sols du type
« Corine Land Cover » (produite par photo-interprétation d’images satellites) permettra de
détecter les zones urbaines et de distinguer les différents types de végétations. Enfin l’état de
surface des sols, notamment en milieu agricole, peut modifier leur capacité d’infiltration
[Hébrard et al., 2006]. La création d’une croûte de battance va par exemple diminuer la
capacité d’infiltration et favoriser le processus de ruissellement.
La pédologie va également jouer sur la réponse hydrologique du bassin. Les propriétés
hydrodynamiques des sols (porosité, conductivité hydraulique) vont par exemple déterminer
le type de ruissellement direct. Un sol très perméable favorisera le ruissellement par saturation
alors qu’un sol peu perméable favorisera le ruissellement hortonien. Des cartes pédologiques
peuvent être utiles puisque les propriétés hydrodynamiques des sols dépendent de leur
caractéristiques (structure, texture, …). Des formules de pédotransfert ont d’ailleurs été
établies pour relier ces caractéristiques aux propriétés hydrodynamiques des sols. Néanmoins,
pour un type de sol donné, il n’existe pas une relation unique de pédotransfert ce qui montre
la difficulté à relier la nature du sol à ses propriétés hydrodynamiques.
La géométrie du bassin versant
La géométrie des réservoirs (formations superficielles ou réservoirs profonds) d’un
bassin versant peut jouer sur sa réponse hydrologique. L’épaisseur des sols joue sur leur
capacité de stockage et donc sur le déclenchement du ruissellement direct. De même pour les
réservoirs profonds : lors de la crue de 2005, l’aquifère karstique de Nîmes, peu épais, se
sature, entraînant un ruissellement total des eaux de pluies tombant à sa surface [Maréchal et
al., 2009]. La mesure de l’épaisseur de ces réservoirs est en général ponctuelle et souvent
estimée de façon approximative.
La gravité étant le moteur essentiel des écoulements, la topographie constitue aussi un
facteur important contrôlant le fonctionnement hydrologique du bassin [Ambroise, 1999]. La
pente des versants peut jouer sur la vitesse du ruissellement et/ou des écoulements sub-
surfaciques. La densité de drainage et la forme du bassin vont jouer sur le temps de
concentration des débits. Ces caractéristiques sont désormais accessibles via des Modèles
Numériques de Terrain. Cette représentation numérique de la topographie permet notamment
un calcul rapide des pentes qui peuvent conduire (dans l’hypothèse où l’eau s’écoule selon la
ligne de plus grande pente) à l’élaboration du réseau de drainage d’un bassin versant.
Néanmoins, le MNT doit être préalablement traité avant d’être utilisé pour l’hydrologie
(comblement des dépressions, technique du river burning utilisée dans les zones plates).
1.4. Conclusion
Ce travail de thèse s’inscrit dans le cadre des crues méditerranéennes rapides ou
« éclair » (la distinction entre les deux variant selon les auteurs). Elles ont lieu en automne et
sont provoquées par des pluies intenses généralement convectives pouvant présenter une forte
variabilité spatio-temporelle. Elles touchent principalement des bassins versants de petite et
moyenne tailles. Leur réponse est brutale (e.g. temps de réponse de 2h30 et débit de pointe de
3300 m3/s à Anduze en septembre 2002), laissant de faibles délais d’anticipation aux
prévisionnistes. Elle peut aussi être influencée par les conditions antérieures d’humidité. Cette
réponse fait intervenir divers processus (ruissellement direct, écoulement de sub-surface et
souterrains) de façon simultanée ou successive dans des proportions qui varient dans le temps
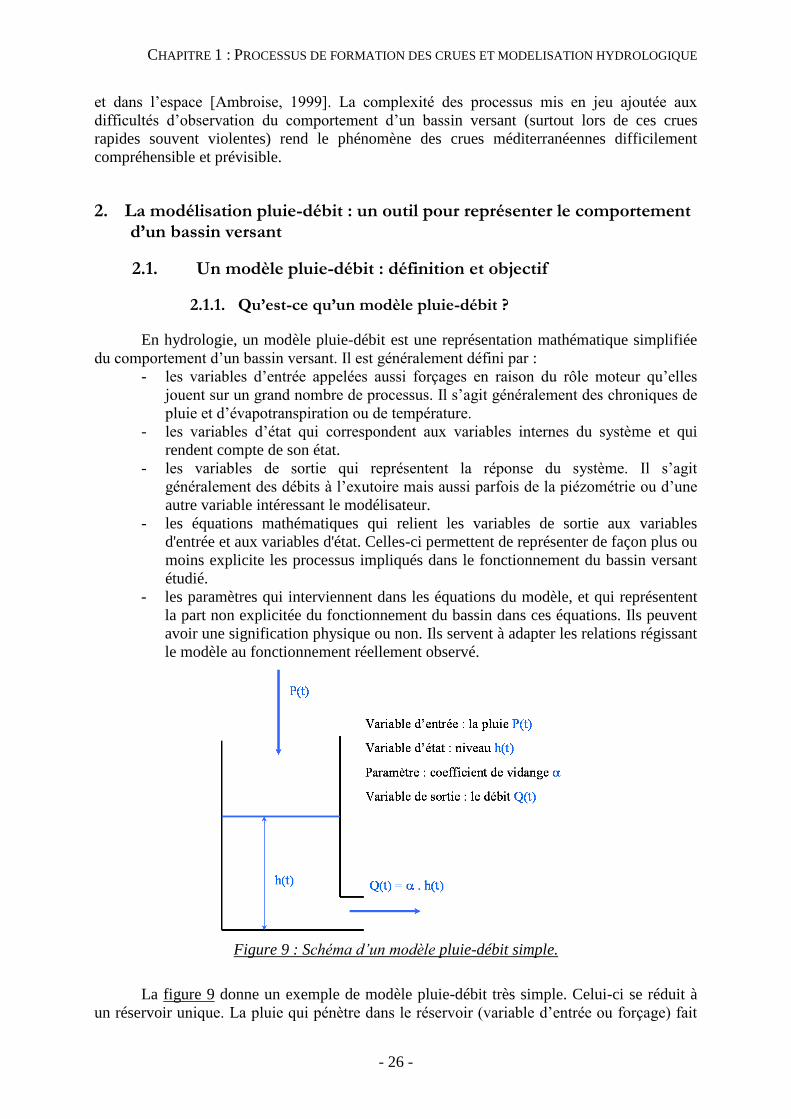
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 26 -
et dans l’espace [Ambroise, 1999]. La complexité des processus mis en jeu ajoutée aux
difficultés d’observation du comportement d’un bassin versant (surtout lors de ces crues
rapides souvent violentes) rend le phénomène des crues méditerranéennes difficilement
compréhensible et prévisible.
2. La modélisation pluie-débit : un outil pour représenter le comportement d’un bassin versant
2.1. Un modèle pluie-débit : définition et objectif
2.1.1. Qu’est-ce qu’un modèle pluie-débit ?
En hydrologie, un modèle pluie-débit est une représentation mathématique simplifiée
du comportement d’un bassin versant. Il est généralement défini par :
- les variables d’entrée appelées aussi forçages en raison du rôle moteur qu’elles
jouent sur un grand nombre de processus. Il s’agit généralement des chroniques de
pluie et d’évapotranspiration ou de température.
- les variables d’état qui correspondent aux variables internes du système et qui
rendent compte de son état.
- les variables de sortie qui représentent la réponse du système. Il s’agit
généralement des débits à l’exutoire mais aussi parfois de la piézométrie ou d’une
autre variable intéressant le modélisateur.
- les équations mathématiques qui relient les variables de sortie aux variables
d'entrée et aux variables d'état. Celles-ci permettent de représenter de façon plus ou
moins explicite les processus impliqués dans le fonctionnement du bassin versant
étudié.
- les paramètres qui interviennent dans les équations du modèle, et qui représentent
la part non explicitée du fonctionnement du bassin dans ces équations. Ils peuvent
avoir une signification physique ou non. Ils servent à adapter les relations régissant
le modèle au fonctionnement réellement observé.
Figure 9 : Schéma d’un modèle pluie-débit simple.
La figure 9 donne un exemple de modèle pluie-débit très simple. Celui-ci se réduit à
un réservoir unique. La pluie qui pénètre dans le réservoir (variable d’entrée ou forçage) fait
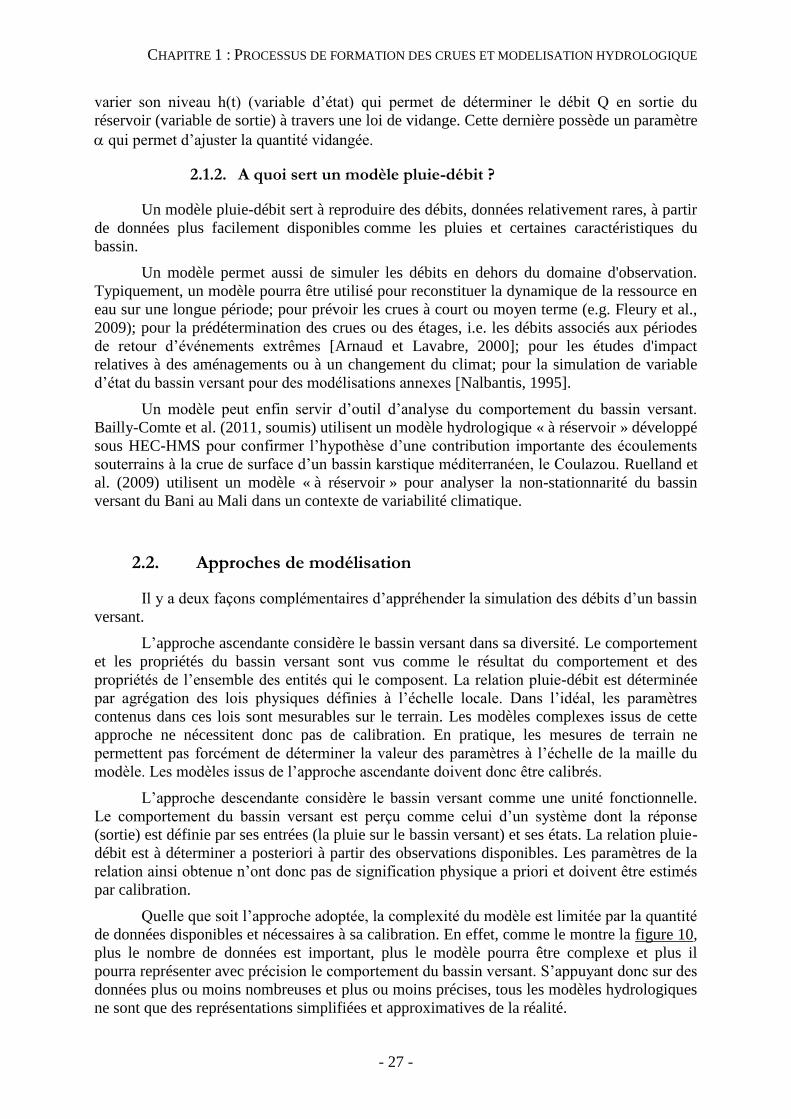
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 27 -
varier son niveau h(t) (variable d’état) qui permet de déterminer le débit Q en sortie du
réservoir (variable de sortie) à travers une loi de vidange. Cette dernière possède un paramètre
qui permet d’ajuster la quantité vidangée.
2.1.2. A quoi sert un modèle pluie-débit ?
Un modèle pluie-débit sert à reproduire des débits, données relativement rares, à partir
de données plus facilement disponibles comme les pluies et certaines caractéristiques du
bassin.
Un modèle permet aussi de simuler les débits en dehors du domaine d'observation.
Typiquement, un modèle pourra être utilisé pour reconstituer la dynamique de la ressource en
eau sur une longue période; pour prévoir les crues à court ou moyen terme (e.g. Fleury et al.,
2009); pour la prédétermination des crues ou des étages, i.e. les débits associés aux périodes
de retour d’événements extrêmes [Arnaud et Lavabre, 2000]; pour les études d'impact
relatives à des aménagements ou à un changement du climat; pour la simulation de variable
d’état du bassin versant pour des modélisations annexes [Nalbantis, 1995].
Un modèle peut enfin servir d’outil d’analyse du comportement du bassin versant.
Bailly-Comte et al. (2011, soumis) utilisent un modèle hydrologique « à réservoir » développé
sous HEC-HMS pour confirmer l’hypothèse d’une contribution importante des écoulements
souterrains à la crue de surface d’un bassin karstique méditerranéen, le Coulazou. Ruelland et
al. (2009) utilisent un modèle « à réservoir » pour analyser la non-stationnarité du bassin
versant du Bani au Mali dans un contexte de variabilité climatique.
2.2. Approches de modélisation
Il y a deux façons complémentaires d’appréhender la simulation des débits d’un bassin
versant.
L’approche ascendante considère le bassin versant dans sa diversité. Le comportement
et les propriétés du bassin versant sont vus comme le résultat du comportement et des
propriétés de l’ensemble des entités qui le composent. La relation pluie-débit est déterminée
par agrégation des lois physiques définies à l’échelle locale. Dans l’idéal, les paramètres
contenus dans ces lois sont mesurables sur le terrain. Les modèles complexes issus de cette
approche ne nécessitent donc pas de calibration. En pratique, les mesures de terrain ne
permettent pas forcément de déterminer la valeur des paramètres à l’échelle de la maille du
modèle. Les modèles issus de l’approche ascendante doivent donc être calibrés.
L’approche descendante considère le bassin versant comme une unité fonctionnelle.
Le comportement du bassin versant est perçu comme celui d’un système dont la réponse
(sortie) est définie par ses entrées (la pluie sur le bassin versant) et ses états. La relation pluie-
débit est à déterminer a posteriori à partir des observations disponibles. Les paramètres de la
relation ainsi obtenue n’ont donc pas de signification physique a priori et doivent être estimés
par calibration.
Quelle que soit l’approche adoptée, la complexité du modèle est limitée par la quantité
de données disponibles et nécessaires à sa calibration. En effet, comme le montre la figure 10,
plus le nombre de données est important, plus le modèle pourra être complexe et plus il
pourra représenter avec précision le comportement du bassin versant. S’appuyant donc sur des
données plus ou moins nombreuses et plus ou moins précises, tous les modèles hydrologiques
ne sont que des représentations simplifiées et approximatives de la réalité.
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 28 -
Figure 10 : Schéma représentant la relation existant entre les données disponibles sur un
bassin, la complexité du modèle hydrologique et ses performances (d’après Grayson et
Blöschl, 2000).
La différence entre ces deux approches vient du niveau de détail qu’elles proposent
pour rendre compte de l’hétérogénéité spatio-temporelle et de la diversité des processus
impliqués dans la réponse du bassin. Face à la diversité des objectifs de modélisation et des
bassins versants étudiés, les modèles hydrologiques résultent bien souvent d’un compromis
entre une approche purement ascendante et une approche purement descendante. Une
classification permet alors de distinguer les modèles hydrologiques en fonction de la
représentation spatiale, temporelle et physique des processus modélisés.
2.3. Classification des modèles pluie-débit
Devant les nombreux objectifs auxquels doit répondre l’hydrologie et les différentes
approches de modélisations existantes (de l’approche ascendante à l’approche descendante),
une multitude de modèles pluie-débit ont été développés ce qui peut inciter à dire qu’ « il y a
presque autant de modèles que d’hydrologues… ! » [Ambroise, 1999]. Afin d’y voir plus
clair, quelques critères peuvent être utilisés pour classer ces modèles. Il s’agit de la
représentation du temps, de celle de l’espace et de la schématisation ou conceptualisation des
processus. Pour chacun de ces 3 critères, on décrira succinctement les différentes catégories
de modèle en précisant leurs avantages et leurs inconvénients.
2.3.1. Classification en fonction de la représentation des processus
Les modèles représentent le comportement d’un bassin versant avec un degré
d’abstraction plus ou moins important. On peut les classer en 3 catégories principales : les

CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 29 -
modèles de type « boîte noire », les modèles « à réservoir » (appelés aussi « conceptuels ») et
les modèles dits « à base physique ».
Les modèles de type « boîte noire » visent à établir une relation purement
mathématique entre la pluie et le débit sans faire d’hypothèse sur la nature physique du
bassin. Cette catégorie regroupe les modèles régressifs, les méthodes fondées sur les fonctions
de transfert comme l’hydrogramme unitaire ou la méthode de la Différence Première de la
Fonction de Transfert (DPFT) et les réseaux de neurones. Relativement simple à mettre en
œuvre, ce type de modèle peut être utilisé pour la prévision des crues.
La méthode PQb [Fourmigué, 2003 in Tangara, 2005] a été utilisée pour prévoir les
débits à Belfort. Il s’agit d’une régression linéaire multiple qui permet de prévoir le débit à
une date t+L à partir du débit à t et du cumul de pluie tombé entre t-L et t. Cette méthode a
donné des résultats comparables à ceux d’un modèle à réservoir du type Génie Rural (modèle
GR3H).
..
.)(.
1)(
L
bStQ
aLtQ
(Eq. 1)
avec Q(t+L) débit prévu à t+L, Q(t) débit prévu à t, (>1) coefficient de décrue, L délai de
prévision, S surface du bassin versant, b (0<b<1) coefficient de réduction des pluies et
cumul de pluie tombé entre t-L et t (à l’origine =1).
Pour prévoir le débit à la source karstique du Lez, une régression linéaire multiple a été
établie entre le débit et différents niveaux piézométriques [Karam, 1989].
La méthode de la DPFT a été utilisée pour la prévision des crues de la Bourne, affluent
de l’Isère, améliorant ainsi la production d’énergie et la gestion des réservoirs [Duband et al.,
1990]. Elle a aussi été utilisée pour la prévision des crues de l’Oued Dis (Sebaou) en Algérie
[Dechemi et Chambaz, 1994]. Cette méthode consiste à estimer de façon itérative la fonction
de transfert puis les pluies efficaces (ou pluies nettes) à partir des seules chroniques de pluie
et débit à l’exutoire en supposant une fonction de transfert linéaire.
Les réseaux de neurones artificiels sont utilisés pour la prévision des débits mais aussi
d’autres variables hydrologiques [Coulibaly et al., 2000]. Maier et Dandy (2000) font état
dans leur revue de 23 publications concernant la prévision des débits par réseaux de neurones.
Ce type de modèle a été testé sur plusieurs types de bassins versants allant des petits bassins
versants hawaïens de quelques km2 (2 à 15 km
2) [Sahoo et al., 2006] à un grand bassin
versant au nord de l’Italie [Campolo et al., 1999] en passant par un bassin versant
méditerranéen à crue rapide (le Gardon d’Anduze) [Toukourou et al., 2009]. Plus de détails
sont donnés dans la thèse de Kong A Siou (2011).
Bien que simples à mettre en œuvre, ces modèles « boîte noire » ne prévoient que le
débit à l’exutoire du bassin versant. Ils nécessitent un grand nombre de données pour leur
calage et leurs paramètres sont difficiles à relier aux caractéristiques physiques du bassin.
L’état hydrique n’est pas forcément pris en compte de façon explicite. Ils ne permettent pas de
comprendre le comportement d’un bassin versant.
Les modèles « conceptuels » ou « à réservoir » sont des modèles analogiques. Le
bassin versant est alors considéré comme un « assemblage de réservoirs interconnectés »
[Ambroise, 1999]. Chaque réservoir est décrit par plusieurs paramètres (taille et paramètre(s)
de vidange) et l’évolution de son niveau est régie par une équation différentielle ordinaire.
Grâce à cette analogie, des liens plus faciles sont possibles avec la physique du bassin. En
effet, elle permet d’introduire de façon explicite l’influence de l’état hydrique du bassin sur sa
réponse hydrologique. Des travaux menés sur les modèles à réservoir de type Génie Rural
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 30 -
(GR) ont permis de relier le niveau d’un des réservoirs du modèle à l’humidité mesurée in-
situ ou à distance [Quesney et al., 2000 ; Loumagne et al., 2001]. D’autres travaux ont permis
de relier certains des paramètres contrôlant la vidange des réservoirs aux propriétés des
courbes de tarissement observées [Ambroise et al., 1995 in Ambroise, 1999].
Ce type de modèle est souvent utilisé pour la prévision des crues. On peut citer
notamment les modèles GR3H [Tangara, 2005] ou GRP utilisé pour prévoir les débits en
temps réel sur la Seine en amont de Paris [Berthet, 2010].
Même si des parallèles sont faits avec des caractéristiques physiques du bassin, ces
modèles constituent une représentation très grossière de son fonctionnement réel. Ceci peut
devenir un avantage lorsque les connaissances sur le fonctionnement hydrologique du bassin
versant sont limitées. Les lois de vidange sont souvent choisies de façon arbitraire et un
certain nombre de paramètres restent sans grande signification physique et doivent être
déterminés par calage. Ce type de modèle ne permet pas d’analyser le comportement d’un
bassin versant. Il permet seulement de reproduire le débit à son exutoire.
Les modèles « à base physique » s’appuient sur les lois de l’hydrodynamique dont les
paramètres, en principe mesurables sur le terrain, sont associés à des propriétés physiques du
bassin. Ces modèles demandent généralement une discrétisation fine de l’espace. Permettant
ainsi une représentation physique et détaillée du bassin versant, ces modèles permettent de
simuler son évolution en tout point et tout instant. Cependant en pratique, ces modèles
requièrent un nombre important de données rarement disponibles. Ils possèdent donc souvent
trop de paramètres (le modèle SHE en possède 2400 au total) comparés au peu d’observations
nécessaires à leur calibration. De plus, ils demandent souvent des temps de calculs importants
incompatibles avec la prévision des crues. C’est pourquoi des modèles « à base physique »
dégradés ont été conçus. Ces modèles ne prennent en compte que les processus dominants à
l’échelle du bassin versant. TOPMODEL [Beven et Kirkby, 1979 ; Franchini et al., 1996]
prend en compte de façon synthétique l’effet de la topographie permettant la distribution de
l’eau dans le sol grâce à des indices de similarité hydrologique. Cette répartition de l’eau dans
le sol permet ainsi de définir les zones saturées sur lesquelles le ruissellement pourra se faire.
MARINE [Borrell-Estupina, 2004] représente l’infiltration à travers la formule de Green et
Ampt et son transfert avec une onde cinématique.
2.3.2. Classification en fonction de la représentation spatiale
Les modèles peuvent aussi être classés en fonction de la représentation spatiale des
facteurs impliqués dans le comportement d’un bassin versant. On distingue alors les modèles
globaux des modèles semi-distribués ou distribués. Les modèles globaux considèrent le bassin
versant comme une seule entité définie par des caractéristiques moyennes et à laquelle on
applique une pluie moyenne. Il s’agit typiquement des modèles de type Génie Rural. On peut
ensuite choisir de découper le bassin en sous bassins versants (modèles semi-distribués) ou en
mailles régulières (modèles distribués). Si on opte pour l’approche (semi) distribuée, on peut
choisir de ne spatialiser que les facteurs dont la répartition spatiale est jugée cruciale dans la
réponse hydrologique d’un bassin versant. La spatialisation peut concerner les forçages (les
précipitations), l’état hydrique initial du bassin ou encore les caractéristiques du bassin
(topographie, géologie, pédologie, occupation des sols). En permettant une meilleure
représentation de l’hétérogénéité pouvant exister sur un bassin, la spatialisation entraîne une
complexification des modèles.
La question est alors de savoir si cette complexification s’accompagne
systématiquement d’une amélioration des résultats des modèles. Les conclusions des
publications comparant l’approche globale à l’approche (semi) distribuée divergent. Par
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 31 -
exemple, Michaud et Sorooshian (1994) appliquent trois modèles différents au bassin semi-
aride de Walnut Gulch (150 km2) : deux sont distribués (KINEROS et SCS version distribuée)
et un est global (SCS version globale). Sans calibration préalable, les modèles distribués sont
plus performants que le modèle global. En comparant trois autres modèles – NAM un modèle
global, MIKE SHE, un modèle distribué « à base physique » et WATBAL un modèle
« intermédiaire » – Refsgaard et Knudsen (1996) concluent qu’avec un an de calibration, les
trois modèles donnent des performances similaires. En utilisant un modèle global et un
modèle semi-distribué sur deux petits bassins versants (6.71 et 26.03 km2) du Kenya,
Onyando et al. (2003) concluent que les deux modèles donnent des performances similaires.
Comme la spatialisation du modèle entraîne sa complexification, on peut se demander
quels facteurs, influençant la réponse du bassin, doivent être distribués, et quels facteurs
peuvent être représentés par une valeur moyenne.
Certains ont cherché à distribuer la capacité d’infiltration sur le bassin versant en
distribuant les paramètres de leurs modèles. Kite et Kouwen (1992) comparent un modèle
global et sa version semi-distribuée sur un bassin versant de Colombie britannique. Pour le
modèle semi-distribué, les paramètres sont spatialisés en fonction de l’occupation des sols sur
le bassin versant. Cette spatialisation donne de meilleurs résultats que l’approche globale.
Brath et Montanari (2000) utilisent une version globale et spatialisée du modèle SCS sur un
grand bassin versant (1294 km2) du nord de l’Italie. La capacité d’infiltration des sols est
spatialisée en fonction du type de sol et de l’occupation des sols. Ils concluent que l’influence
de la capacité d’infiltration des sols est moindre lorsque les événements pluvieux sont
importants. L’inconvénient de ce type de spatialisation est qu’elle nécessite une bonne
connaissance du fonctionnement du bassin, un grand nombre de données (sur l’occupation des
sols et/ou les types de sols présents sur le bassin) et conduit à une augmentation du nombre de
paramètres du modèle.
On peut alors spatialiser d’autres facteurs influençant la réponse du bassin sans forcément
augmenter le nombre de paramètres du modèle. Les spatialisations des précipitations (par
l’introduction de données de pluie radar par exemple) et du transfert (par l’utilisation d’un
MNT) présentent cet avantage. Une étude réalisée avec le modèle SAC-SMA dans sa version
globale et semi-distribuée montre que la spatialisation des paramètres du modèle n’améliore
pas les performances du modèle. L’amélioration est due à la spatialisation du transfert et de
l’entrée [Boyle et al., 2001]. En milieu méditerranéen où les épisodes pluvieux sont
caractérisés par leur forte variabilité spatio-temporelle, des études ont été menées sur la
spatialisation de la pluie dans les modèles pluie-débit. Corral et al. (2000) applique à un
bassin versant méditerranéen de 48 km2, TOPMODEL avec une pluie globale, TOPMODEL
avec une pluie distribuée et SCS avec une pluie globale. La version distribuée de
TOPMODEL présente alors de meilleures performances. Sur un bassin du nord ouest de
l’Italie, Sangati et al. (2009) montrent que ne pas prendre en compte la variabilité spatiale de
la pluie peut conduire à des erreurs importantes sur le pic de crue atteignant jusqu’à 35% de
sa valeur. Tramblay et al. (2011) appliquent le modèle « SCS – Lag and Route » au bassin du
Gardon d’Anduze en utilisant des données de pluie globale (obtenues à partir des mesures de
pluie au sol ou par radar météorologique) et des données de pluies spatialisées (venant des
mesures de pluies au sol ou du radar météorologique). Après calibration, ils montrent que la
spatialisation de la pluie conduit à une meilleure estimation de la condition initiale du modèle
et une meilleure estimation du paramètre de vitesse. Il semblerait donc, au vu de ces études,
que la spatialisation de la pluie est essentielle à prendre en compte dans la modélisation des
crues méditerranéennes, même si son influence sur la réponse du bassin diminue avec la taille
du bassin et la fréquence de l’épisode pluvieux [Arnaud et al., 2002].
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 32 -
2.3.3. Classification en fonction de la représentation temporelle
Les hydrologues s’accordent pour dire que les conditions d’humidité d’un bassin
versant au début d’un épisode pluvieux ont une influence majeure sur sa réponse
hydrologique [Vivoni et al., 2007]. De plus la relation entre l’humidité des sols mesurée sur
un bassin et le débit observé à son exutoire est non-linéaire comme le montrent Meyles et al.
(2003). Une faible erreur sur la valeur de la condition initiale du modèle hydrologique peut
alors conduire à une erreur importante sur la simulation des débits [Zehe et Blöschl, 2004].
Par conséquent, la connaissance de l’état hydrique initial du bassin est une question cruciale à
laquelle les hydrologues répondent de deux manières différentes. Ce problème d’estimation
de l’état hydrique initial permet ainsi de distinguer les modèles continus des modèles
événementiels.
Les modèles continus choisissent de représenter le comportement du bassin versant
tant en période de crue (phase événementielle) qu’en période d’étiage (phase inter-
événementielle). Pour initialiser ces modèles, on utilise une période de chauffe (warm-up
period) en début de simulation. L’avantage de cette approche est que si la période de chauffe
est suffisamment longue, le modèle est indépendant de la condition initiale fixée en début de
simulation. La durée de cette période de chauffe est généralement d’un cycle hydrologique
[Perrin, 2000] mais peut durer plusieurs cycles notamment sur les bassins où les écoulements
souterrains sont importants [Le Moine, 2008]. Cette période de chauffe n’étant pas utilisée
dans le calcul des critères de performances, il est donc nécessaire d’avoir des chroniques
suffisamment longues et continues pour initialiser ce type de modèle. Ceci n’est pas
forcément évident en contexte de prévision des crues méditerranéennes où les chroniques
horaires ne sont pas forcément très longues et peuvent présenter des lacunes. De plus, la
simulation de la phase inter-événementielle nécessite la représentation d’un plus grand
nombre de processus notamment l’évapotranspiration réelle difficile à estimer notamment en
milieu karstique [Marsaud, 1996], l’interception et ou le drainage des sols. Ceci peut
augmenter le nombre de paramètres du modèle et/ou le nombre de données nécessaires à son
fonctionnement. Les modèles peuvent alors être moins frugaux et/ou moins parcimonieux que
des modèles de type événementiel. C’est le cas du modèle GRP utilisé en opérationnel pour la
prévision des crues en temps réel sur la Seine en amont de Paris [Berthet et al., 2009] qui
nécessite en plus de la pluie des données d’évapotranspiration potentielle. Ce modèle reste
néanmoins parcimonieux avec uniquement 3 paramètres. D’autres modèles continus plus
complexes existent comme le modèle couplé TOPMODEL-ISBA [Audard-Vincendon, 2010],
utilisé pour la prévision des crues méditerranéennes. Dans ce couplage, TOPMODEL
relativement parcimonieux représente les processus de la phase événementielle et ISBA
contenant plus de paramètres représente les processus de la phase inter-événementielle. ISBA
est également utilisé dans le modèle hydrométéorologique SAFRAN-ISBA-MODCOU
[Habets et al., 1999 ; Rousset et al., 2004 ; Habets et al., 2008] qui permet de simuler de façon
continue les débits des grands cours d'eau français. Ce modèle nécessite un grand nombre de
données et de paramètres ; forçages météorologiques, caractéristiques des sols et de la
végétation [Noilhan et Mahfouf, 1996].
Les modèles événementiels choisissent de ne représenter le comportement du bassin
versant qu’en période de crue (phase événementielle). Ne simulant pas la phase
interévénementielle, ces modèles sont plus parcimonieux permettant une calibration plus
facile des paramètres. Ils sont aussi plus frugaux puisqu’ils nécessitent moins de données en
entrée que les modèles continus. En effet, seules les chroniques de pluies sur l’événement leur
sont fournies. Les risques de lacunes dans les chroniques sont ainsi limités (comparés aux
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 33 -
modèles continus) ce qui en fait des outils attrayants pour la prévision des crues en temps réel.
Leur point faible est que la saturation initiale des sols doit être fixée de façon externe au
modèle. Néanmoins, plusieurs méthodes permettent d’estimer correctement la valeur de cette
condition initiale à partir de divers indicateurs de l’état hydrique du bassin. Le débit de base
sert, par exemple à initialiser TOPMODEL [Franchini et al., 1996] ou le modèle
GR3H [Fourmigué et Lavabre, 2005 ; Tangara, 2005]. Des modèles s’initialisent aussi à partir
des données d’humidité de sol mesurées in situ [Brocca et al., 2008 ; Tramblay et al., 2010]
ou estimées par télédétection [Quesney et al., 2000 ; Pellarin et al., 2006]. D’autres
s’initialisent avec des Indices de Pluies Antécédentes [Peugeot et al., 2003]. D’autres encore
choisissent d’initialiser leur modèle à partir des sorties de modèles simples de bilan en eau
[Goodrich et al., 1994 ; Brocca et al., 2008] ou des sorties de modèles transfert sol-végétation-
atmosphère (TSVA) plus complexes comme l’humidité de la couche racinaire du modèle
Interaction Sol Biosphère Atmosphère (ISBA) de Météo-France [Borrell-Estupina et al.,
2005 ; Marchandise, 2007 ; Tramblay et al., 2010]. Enfin, certains comme Nalbantis (1995)
utilisent la version continue d’un modèle pluie-débit tournant à pas de temps journalier pour
initialiser la version événementielle de ce même modèle tournant à pas de temps horaire.
2.4. Calibration et validation d’un modèle
Tous les modèles décrits en section 2.3 possèdent un certain nombre de paramètres
non directement mesurables sur le terrain. Le but de la calibration est alors de trouver les
valeurs de ces paramètres pour permettre de simuler au mieux le comportement hydrologique
du bassin versant [Madsen, 2000]. La calibration s’apparente en fait à la résolution d’un
problème inverse : les valeurs de certains paramètres du modèle sont inconnues et doivent être
identifiées grâce aux observations disponibles. La résolution de ce problème passe par la
minimisation (ou la maximisation) d’une fonction objectif qui permet d’évaluer les
performances du modèle. L’identification de la valeur des paramètres du modèle
hydrologique va donc dépendre (i) de la fonction objectif utilisée qui quantifie l’écart entre la
variable observée et la variable simulée par le modèle et (ii) de la méthode d’optimisation
utilisée pour minimiser la fonction objectif préalablement choisie. Le jeu de paramètres
optimaux ainsi défini sera ensuite testé lors de la phase de validation sur des observations
n’ayant pas servi à la calibration.
2.4.1. Le choix de la fonction objectif
Les fonctions objectifs quantifient l’écart existant entre la variable observée et celle
simulée par le modèle. Toutes ces fonctions ne sont pas identiques. Certaines permettent de
caractériser la dispersion existant entre les variables simulées et observées, d’autres cherchent
à quantifier l’erreur systématique, d’autres encore s’intéressent à des caractéristiques
spécifiques de l’hydrogramme. Dans cette section, Qi,sim et Qi,obs sont respectivement les
débits simulés et observés au pas de temps i, obsQ est la moyenne des débits observés, simQ
est la moyenne des débits simulés et n le nombre de pas de temps considérés.
La fonction objectif la plus utilisée en hydrologie est celle du critère de Nash :
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 34 -
n
i
obsobsi
n
i
obsisimi
Nash
1
2
,
1
2
,,
)(
)(
1 (Eq. 2)
Cette fonction compare la simulation du modèle sur n pas de temps à la moyenne des
observations prise comme modèle de référence. Plus le Nash est proche de 1, plus la
simulation est proche de l’observation.
Si le Nash > 0, alors le modèle est meilleur que la moyenne des débits
Si le Nash < 0, alors le modèle ne fait pas mieux que la moyenne des débits
Etant quadratique, ce critère a tendance à donner un poids plus important aux forts
écarts de débits se produisant généralement en période de crue. Ce critère peut être calculé sur
les racines carrées ou les logarithmes des débits ce qui permet d’évaluer la sensibilité du
modèle respectivement aux débits moyens et aux débits faibles [Weisse et al., 2003].
On peut aussi évaluer l’erreur quadratique moyenne, Root Mean Square Error (RMSE)
pour décrire aussi la dispersion entre les variables simulées et observées.
n
i
obsisimi QQn
RMSE1
2
,, )(1
. (Eq. 3)
Plus la RMSE est faible, plus la dispersion est faible et plus la variable simulée par le modèle
est proche de celle observée.
On peut aussi calculer un coefficient de détermination pour évaluer la corrélation entre
les variables observée et simulée
n
i
n
i
simsimiobsobsi
n
i
simsimiobsobsi
QQQQ
QQQQ
R
1 1
2
,
2
,
2
1
,,
2
)()(
]))([(
. (Eq. 4)
Le biais peut aussi être calculé pour évaluer la surestimation ou la sous-estimation
systématique du modèle par rapport aux observations
1
1
,
1
,
n
i
obsi
n
i
simi
Q
Q
B . (Eq. 5)
Enfin des critères peuvent porter sur des caractéristiques spécifiques de
l’hydrogramme de crue comme la valeur du débit de pointe ou son temps d’arrivée. Ces
critères peuvent être utilisés en prévision des crues [Berthet et al., 2009].
ERDP = max(Qi,sim) – max(Qi,obs), (Eq. 6)
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 35 -
tp = tp,sim – tp,obs , (Eq. 7)
où tp,sim est le temps d’arrivé du pic de crue simulé et tp,obs est le temps d’arrivée du pic de
crue observé.
Le choix de la fonction objectif va influencer la calibration des paramètres. En effet,
Gupta (1998) montre qu’une calibration effectuée avec deux fonctions différentes conduit à
deux jeux de paramètres optimaux différents. La première fonction objectif va conduire à un
bon ajustement de la montée de crue alors que la seconde va conduire à un bon ajustement de
la décrue. Il n’existe donc pas un jeu unique de paramètres optimaux mais plusieurs jeux de
paramètres optimaux selon la fonction objectif qu’on utilise. Ces différents jeux de
paramètres optimaux forment un ensemble de Pareto. Dans cet ensemble un membre n’est pas
meilleur ou pire qu’un autre membre. Afin de sélectionner un membre de cet ensemble et
n’avoir qu’un seul jeu de paramètres, on peut agréger les différentes fonctions objectifs pour
n’en former qu’une seule [Madsen, 2000 ; Ruelland et al., 2009].
2.4.2. Les méthodes de calibration
Il existe différentes manières d’identifier les valeurs des paramètres d’un modèle.
La calibration peut se faire de manière manuelle par « essais et erreurs » : différents
jeux de valeurs de paramètres sont testés jusqu’à en trouver un qui convienne. Ils peuvent
aussi être fixés successivement en fonction de leur effet sur l’hydrogramme de crue. Ce type
de méthode bien qu’apparemment simple nécessite une bonne connaissance du modèle et
n’est valable que pour un petit nombre de paramètres. Elle est souvent longue à mettre en
œuvre et peut s’avérer peu concluante notamment si les variations des paramètres se
compensent.
La calibration peut aussi se faire de manière automatique. Elle utilise alors un algorithme
d’optimisation qui explore l’espace des paramètres et cherche à converger vers un optimum
de la fonction objectif. Dans sa thèse, Perrin (2000) passe en revue les différentes catégories
d’algorithmes d’optimisation en évoquant leurs avantages et leurs inconvénients. Il distingue
2 types d’algorithmes ou méthodes d’optimisation : les méthodes locales et les méthodes
globales.
Les méthodes locales partent d’un jeu initial de paramètres. Celui-ci constitue le point de
départ de la méthode dans l’espace des paramètres. La méthode explore ensuite à chaque
itération une direction de cet espace de façon à améliorer systématiquement la valeur de la
fonction objectif. Lorsqu’un optimum de la fonction objectif est atteint, les itérations
s’arrêtent. Le jeu de paramètres optimaux est alors celui de la dernière itération. Ces méthodes
nécessitent un temps de calcul relativement faible comparé aux méthodes globales.
L’inconvénient est que si la fonction objectif présente plusieurs optima, ces méthodes sont
susceptibles de converger vers un optimum local.
Les méthodes globales permettent d’explorer une plus grande partie de l’espace des
paramètres en l’échantillonnant de façon régulière ou aléatoire. Grâce à cet échantillonnage,
elles ne dépendent plus du jeu de paramètres initialement choisi ce qui permet en théorie
d’éviter les optima locaux. Des études réalisées avec des données synthétiques (où les
données et la structure du modèle sont parfaites) semblent montrer que les méthodes globales
sont supérieures aux méthodes locales. Les études réalisées avec des données réelles ne
semblent pas confirmer cette supériorité. Les méthodes globales semblent aussi dépendantes
de l’échantillonnage initial de l’espace des paramètres. Nécessitant un temps de calcul
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 36 -
important, ces méthodes globales sont en pratique délaissées au profit de méthodes locales
plus rapides.
Toutes ces méthodes de calibration permettent d’identifier les paramètres d’un modèle
mais elles peuvent implicitement compenser les erreurs contenues dans les données servant à
sa calibration. Elles se heurtent aussi à la structure souvent trop complexe des modèles
entraînant des interactions entre les différents paramètres. On peut donc avoir différents jeux
de paramètres équivalents pour une même valeur de la fonction objectif. C’est le problème
d’équifinalité énoncé par Beven et Binley (1992). Afin d’éviter ce problème, de nombreux
modélisateurs adoptent le principe de parcimonie : à performances égales, on garde le modèle
le plus simple. Une complexification du modèle doit alors s’accompagner obligatoirement
d’une amélioration de ses performances.
Quelle que soit la méthode de calibration utilisée, le choix de la période de calibration
est également crucial pour la qualité du calage. Plus cette période représente une large gamme
d’événements différents, plus le modèle sera représentatif du fonctionnement du bassin
versant.
2.4.3. Validation
Une fois le modèle calibré, il convient d’évaluer son réalisme sur des données qui
n’ont pas servi à la calibration. Il s’agit de la phase d’évaluation ou de validation du modèle.
Klemes (1986) propose une procédure de validation des modèles comprenant plusieurs types
de tests :
- le split sample test (SS) : pour ce test, on sépare la période d’observations
disponibles en deux parties. La première partie servira à la calibration alors que la
seconde servira à la validation puis inversement.
- le differential split-sample test (DSS) : le principe est le même que le test SS, mais
la période d’observation est découpée en deux périodes aux conditions climatiques
différentes (e.g. une période sèche et une période humide).
- le proxy-basin test (PB) : on dispose de données sur deux bassins différents. Le
modèle est alors calibré sur le bassin A et validé sur le bassin B et inversement.
- le proxy-basin differential split-sample test (PB DSS) : le test PB est appliqué dans
des conditions climatiques différentes.
Ces tests ont pour but d’évaluer les capacités du modèle à simuler de nouveaux
événements sur un même bassin versant (SS et DSS) ou le comportement de nouveaux
bassins versants (PB et PB DSS) pour des conditions climatiques stationnaires ou non.
Néanmoins, la validation se limite généralement au split-sample test. De plus, elle repose le
plus souvent sur une seule fonction objectif qui évalue la capacité du modèle à reproduire les
seuls débits à l’exutoire du bassin. De nouvelles stratégies de validation sont alors apparues. Il
s’agit des stratégies multi-objectifs ou multi-variables. Les stratégies multi-objectifs visent à
tirer partie de l’utilisation de plusieurs fonctions objectif (e.g. Ruelland et al., 2009). Les
stratégies multi-variables évaluent non seulement la capacité du modèle à reproduire les
débits à l’exutoire mais aussi sa capacité à reproduire l’évolution d’autres variables
hydrologiques telles que la piézométrie (e.g. Fleury et al., 2009). D’autres exemples de ces
nouvelles stratégies de validation sont donnés dans la thèse de Le Lay (2006).
CHAPITRE 1 : PROCESSUS DE FORMATION DES CRUES ET MODELISATION HYDROLOGIQUE
- 37 -
2.5. Conclusion
Un modèle est le résultat d’un compromis entre l’objectif auquel il doit répondre, la
compréhension des processus hydrologiques et la disponibilité de données sur le bassin. Ces 3
facteurs doivent guider les choix de modélisation. Le modèle retenu pour cette thèse est
destiné à la prévision en temps réel, pour un bassin méditerranéen karstique, le Lez.
Compte tenu de l’objectif de prévision, le modèle devra être frugal. Autrement dit, il
devra pouvoir opérer avec un nombre de données assez limitées et facilement disponibles en
temps réel.
Le phénomène étudié étant les crues rapides, le modèle devra opérer au pas de temps le
plus fin possible afin de bien représenter la dynamique du phénomène. Dans le cadre de cette
étude, les données de pluie au sol disponibles ont imposé un pas de temps à l’horaire. Le
modèle sera également événementiel ce qui permettra d’éviter les risques de lacunes dans les
données (plus fréquents en temps réel et pour des données horaires). Cela permettra aussi de
ne modéliser que les processus dominants de la crue et de s’affranchir de la modélisation des
processus dominants pendant la période inter-événementielle comme l’évapotranspiration. Le
nombre de paramètres du modèle sera ainsi réduit, cette parcimonie rendant la calibration plus
facile.
Le modèle sera de type « conceptuel » ou « à réservoir ». En effet, les connaissances
sur les processus impliqués dans les crues rapides méditerranéennes notamment karstiques
sont limitées. Sur ce type de bassin on ne connaît pas ou peu la contribution des écoulements
souterrains aux crues de surface. Ceci rend a priori une modélisation à base physique difficile.
De plus, l’état hydrique en début d’événement semble un facteur important contrôlant la
violence des crues méditerranéennes. A la différence des modèles de type boîte noire, les
modèles « à réservoir » permettraient de prendre explicitement en compte ce facteur.
Le modèle sera distribué. Les quelques études présentées semblent s’accorder sur
l’importance de la spatialisation de la pluie en milieu méditerranéen. L’utilisation d’autres
modèles spatialisés pour la pluie en milieu méditerranéen tels que MARINE, ALHTAIR ou
SCS-Lag and Route conforte ce choix. De plus, ce type de spatialisation n’engendre pas
d’augmentation du nombre de paramètres du modèle ce qui reste compatible avec l’objectif de
prévision des crues.

CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 39 -
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
Au regard des notions abordées dans le chapitre 1, le fonctionnement d’un bassin
versant paraît complexe et son observation limitée et incertaine. De plus, les modèles pluie-
débit apparaissent comme des approximations grossières et très imparfaites de son
fonctionnement hydrologique. L’estimation du débit paraît donc très incertaine. Néanmoins,
des techniques d’assimilation de données permettent d’améliorer cette estimation en
combinant les incertitudes liées aux observations et à la structure du modèle. Ce chapitre
replace ce travail de thèse dans le contexte de l’assimilation de données. Après avoir exposé
le principe de l’assimilation de données et les notations utilisées (section 1), quelques
méthodes d’assimilation employées en géosciences sont succinctement décrites (section 2) et
des exemples d’utilisation en hydrologie sont donnés (section 3).
1. Principe et notations
1.1. Principe et utilité
Le principe de base de l’assimilation de données est de combiner différentes sources
d’information pour estimer au mieux les états d’un système. Les informations disponibles sur
un système sont issues d’observations et d’un modèle numérique [Cosme, 2010]. Les
techniques d’assimilation de données combinent de façon optimale les observations et la
solution issue d’un modèle numérique, appelée ébauche. Le résultat de cette combinaison,
appelé l’analyse, dépend des erreurs que l’on accorde aux observations et de celles qu’on
accorde à la solution du modèle. Ainsi, l’estimation donnée par la technique d’assimilation
sera proche des observations lorsque celles-ci seront précises. En revanche, lorsque ces
observations sont imprécises, l’estimation donnée par la technique d’assimilation sera plus
proche de la solution donnée par le modèle [Reichle, 2008].
D’abord utilisées en météorologie pour améliorer la prévision du temps, les méthodes
d’assimilation de données ont ensuite été utilisées en océanographie et dans d’autres
domaines des géosciences dont l’hydrologie. Ces méthodes permettent de valoriser
l’information contenue dans les modèles en la combinant aux différentes observations
recueillies. Cette combinaison peut se faire avec des observations indirectes et/ou éparses, à la
résolution spatiale trop grossière ou trop fine comparée à celle des modèles, ce qui est
généralement le cas pour les systèmes étudiés en géosciences. Toutes les observations
peuvent être utilisées. Par exemple, deux instruments ayant fait la même observation (au
même endroit et au même moment) donnant deux valeurs différentes pourront contribuer
ensemble à l’amélioration de l’estimation de l’état du système.
1.2. Estimations des états du système
Etat vrai
Quelque soit le système d’étude, on cherche la plupart du temps à estimer au mieux
l’état réel du système. Cet état réel comprend les états statiques et dynamiques du système qui
peuvent varier de façon continue dans l’espace et/ou le temps. Ils sont notés x~ . Pour

CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 40 -
reproduire ces états, on utilise le plus souvent des modèles numériques. Ces derniers ne
manipulant que des variables discrètes dans le temps, est alors discrétisé pour donner le
vecteur d’état vrai xt. C’est donc cet état vrai x
t que l’on cherche à estimer (Eq. 1). Celui-ci
peut contenir les variables d’entrées, les paramètres (caractérisant les états statiques du
système), les variables d’état (caractérisant les états dynamiques du système) ou les variables
de sorties du modèle numérique.
)~(xx t , (Eq. 8)
avec xt le vecteur d’état vrai, l’opérateur permettant la discrétisation, l’état réel continu
du système.
Ebauche
Pour estimer cet état vrai, on dispose généralement d’une première idée de la valeur
des variables de l’état du système. Cette idée a priori est représentée par le vecteur d’ébauche
xb de la même taille que le vecteur d’état vrai x
t. Il estime l’état vrai avec une certaine erreur
b appelée erreur d’ébauche :
tbbxxε (Eq. 9)
Analyse
L’assimilation de données propose ensuite, à partir de cette ébauche xb et d’observations,
une nouvelle estimation de l’état du système. Celle-ci est stockée dans le vecteur d’analyse xa
de la même taille que xt. Elle estime l’état vrai avec une erreur
a appelée erreur d’analyse
taaxxε Eq. 10)
Modèle de propagation des états
Certains états du système ne sont pas statiques mais dynamiques : ils évoluent au cours
du temps. Soit (k) et (k+1) les états réels (continus) pris à deux temps d’observation
consécutifs k et k+1. Ces deux états sont reliés par la relation suivante :
)](~g[)1(~ kk xx , (Eq. 11)
avec g une fonction continue qui représente les processus physiques réels permettant de
passer de l’état observé au temps k à celui observé au temps k+1. En pratique, la physique de
ces processus est représentée par un modèle numérique Mk,k+1 ce qui implique une
discrétisation des états et une approximation de la physique réelle des processus. Ce
modèle de propagation est alors appliqué au vecteur d’état vrai xt. Il est entaché d’une erreur
k,k+1 due à une discrétisation et une représentation approximative des processus physiques
impliqués dans la propagation de l’état du système :
1,1, )]([)1( kk
t
kk
t kk ηxx M . (Eq. 12)
Variables de contrôle
En pratique, l’assimilation de données peut être utilisée pour estimer une partie des
états du système et non tous ses états. On ne cherche donc pas forcément à estimer toutes les
x~
x~
x~ x~
x~

CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 41 -
composantes de l’état vrai mais seulement une partie. Ceci est dû au fait qu’on dispose de peu
d’information sur certaines composantes caractérisant l’état du système et/ou que travailler
sur l’ensemble du vecteur d’état entraînerait une augmentation importante des temps de calcul
dans le processus d’assimilation de données. Les composantes sélectionnées sont stockées
dans le vecteur de contrôle. Ce dernier contient donc les composantes sur lesquelles on choisit
de travailler. Ces dernières peuvent alors correspondre à des variables d’entrée, des
paramètres ou des variables d’état du modèle numérique.
En pratique, les vecteurs caractérisant l’état x du système (à savoir xb, x
a et x
t) ont donc
une taille égale au nombre d’éléments du vecteur de contrôle. Si on choisit de travailler avec n
éléments du vecteur de contrôle alors xb, x
a et x
t seront des vecteurs de taille n.
1.3. Observations du système
Les états réels et continus x du système sont observés à travers un signal réel et
continu y. Ce signal y est relié aux états x du système par la relation suivante :
)h(xy , (Eq. 13)
avec h une fonction continue qui représente la physique réelle impliquée dans l’observation
des états x du système. En pratique, l’observation yo réellement disponible est entachée d’une
erreur de mesure due à l’instrumentation :
εxy )h(o . (Eq. 14)
De plus, h est représenté par un modèle numérique H appelé l’opérateur d’observation. Celui-
ci ne manipule que des variables discrètes (donc s’applique à xt) et ne représente
qu’approximativement la physique inclue dans h. L’observation yo est alors entachée d’une
deuxième erreur dite de représentativité r liée à cet opérateur d’observation :
rtoεεxy )(H . (Eq. 15)
La somme de l’erreur de mesure et l’erreur de représentativité constitue l’erreur
d’observation o. La relation qui lie l’observation à l’état vrai est donc :
otoεxy )(H . (Eq. 16)
En pratique, l’opérateur d’observation H peut prendre plusieurs formes. Lorsque
l’estimation de l’état x ne se fait pas au même moment et/ou au même endroit que les
observations yo, H peut simplement servir à interpoler ou sélectionner les éléments de x à
l’instant et/ou à l’endroit où l’observation s’est effectuée. Lorsque les éléments contenus dans
x ne sont pas directement observables, H correspond à un modèle plus complexe représentant
la physique reliant le vecteur x au vecteur d’observation yo. La taille de ce vecteur est égale au
nombre de données qu’on souhaite assimiler. Si on choisit d’assimiler p données, yo sera un
vecteur de p éléments.
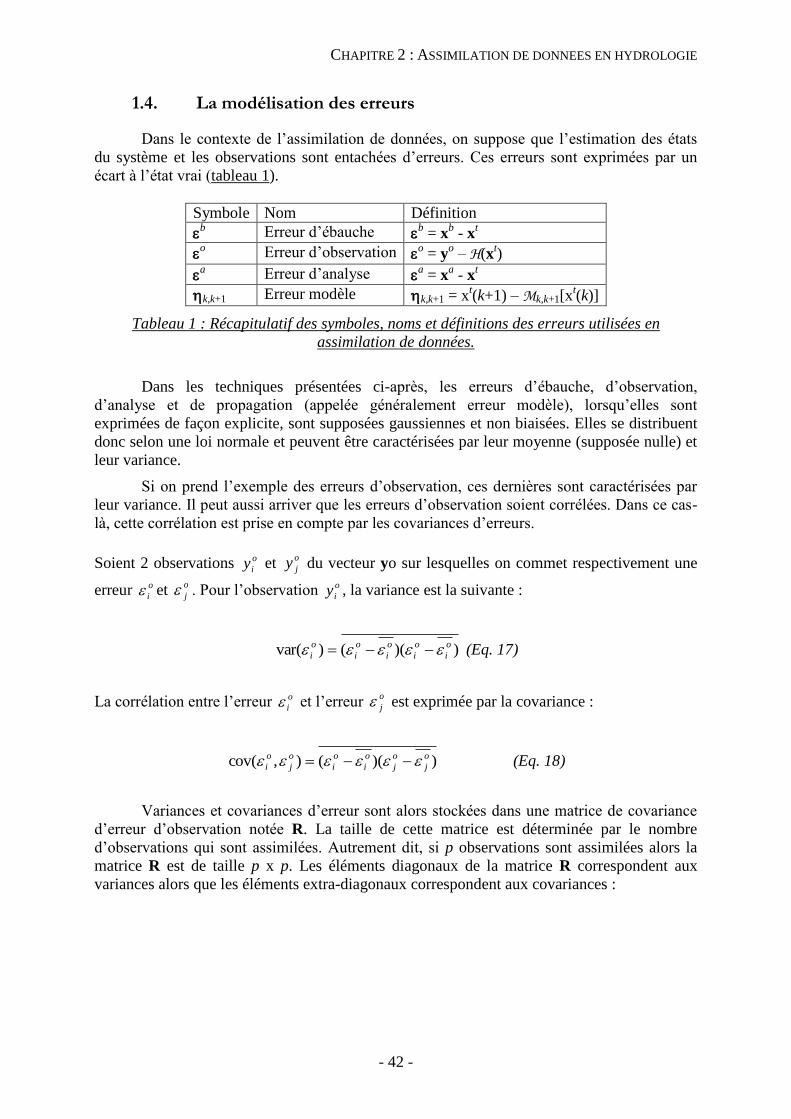
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 42 -
1.4. La modélisation des erreurs
Dans le contexte de l’assimilation de données, on suppose que l’estimation des états
du système et les observations sont entachées d’erreurs. Ces erreurs sont exprimées par un
écart à l’état vrai (tableau 1).
Symbole Nom Définition
b Erreur d’ébauche
b = x
b - x
t
o Erreur d’observation
o = y
o – H(x
t)
a Erreur d’analyse
a = x
a - x
t
k,k+1 Erreur modèle k,k+1 = xt(k+1) – Mk,k+1[x
t(k)]
Tableau 1 : Récapitulatif des symboles, noms et définitions des erreurs utilisées en
assimilation de données.
Dans les techniques présentées ci-après, les erreurs d’ébauche, d’observation,
d’analyse et de propagation (appelée généralement erreur modèle), lorsqu’elles sont
exprimées de façon explicite, sont supposées gaussiennes et non biaisées. Elles se distribuent
donc selon une loi normale et peuvent être caractérisées par leur moyenne (supposée nulle) et
leur variance.
Si on prend l’exemple des erreurs d’observation, ces dernières sont caractérisées par
leur variance. Il peut aussi arriver que les erreurs d’observation soient corrélées. Dans ce cas-
là, cette corrélation est prise en compte par les covariances d’erreurs.
Soient 2 observations o
iy et o
jy du vecteur yo sur lesquelles on commet respectivement une
erreur o
i et o
j . Pour l’observation o
iy , la variance est la suivante :
))(()var( o
i
o
i
o
i
o
i
o
i (Eq. 17)
La corrélation entre l’erreur o
i et l’erreur o
j est exprimée par la covariance :
))((),cov( o
j
o
j
o
i
o
i
o
j
o
i (Eq. 18)
Variances et covariances d’erreur sont alors stockées dans une matrice de covariance
d’erreur d’observation notée R. La taille de cette matrice est déterminée par le nombre
d’observations qui sont assimilées. Autrement dit, si p observations sont assimilées alors la
matrice R est de taille p x p. Les éléments diagonaux de la matrice R correspondent aux
variances alors que les éléments extra-diagonaux correspondent aux covariances :
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 43 -
)var(),cov(),cov(
),cov()var(),cov(
),cov(),cov()var(
o
k
o
k
o
j
o
k
o
i
o
j
o
k
o
j
o
j
o
i
o
i
o
k
o
i
o
j
o
i
R (Eq. 19)
où )var( o
i est la variance qui caractérise l’erreur o
iy et ),cov( o
j
o
i la covariance entre les
erreurs o
i et o
j .
La caractérisation des erreurs et le stockage des variances et covariances décrits pour les
erreurs d’observation sont les mêmes pour l’erreur d’ébauche et l’erreur modèle. Les
covariances d’erreurs d’ébauche sont stockées dans une matrice de covariance d’erreur
d’ébauche B et celles concernant l’erreur modèle sont stockées dans une matrice de
covariance d’erreur modèle Q. La taille des matrices B et Q dépend du nombre d’éléments du
vecteur de contrôle. Si ce dernier contient n éléments alors les matrices B et Q seront de
dimension n x n.
1.5. Récapitulatif des notations utilisées en assimilation de données
Symbole Nom
x Vecteur de contrôle
xt Vecteur d’état vrai
xb Vecteur d’ébauche
xa Vecteur d’analyse
yo Vecteur d’observation
H Opérateur d’observation potentiellement non linéaire
H Opérateur d’observation linéaire
H Jacobienne de l’opérateur d’observation
H(x) Equivalent observable de l’état du système
M Modèle de propagation potentiellement non linéaire
M Modèle de propagation linéaire
M Jacobienne du modèle de propagation
d Vecteur d’innovation
B Matrice de covariance d’erreur d’ébauche
A Matrice de covariance d’erreur d’analyse
R Matrice de covariance d’erreur d’observation
Q Matrice de covariance d’erreur modèle
Tableau 2 : récapitulatif des notations utilisées en assimilation de données.
Cette section 1.5 tente de récapituler le vocabulaire utilisé en assimilation de données
(tableau 2). L’assimilation de données cherche à corriger l’état du système contenu en totalité
ou en partie dans le vecteur de contrôle x. L’assimilation de données permet de se rapprocher
de l’état vrai xt. Elle combine alors de façon optimale une idée a priori de l’état du système x
b
appelée l’ébauche à des observations yo en tenant compte de façon implicite (à travers un
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 44 -
coefficient de pondération) ou explicite (à travers des matrices de covariances d’erreur B et
R) des erreurs faites sur cette ébauche et ces observations. Le résultat de cette combinaison
optimale est appelé l’analyse xa et son erreur (lorsqu’elle est exprimée de façon explicite) est
stockée dans la matrice de covariance d’erreur A. Afin d’estimer cette analyse, l’algorithme
d’assimilation de données calcule généralement l’innovation d, qui correspond à l’écart entre
l’état estimé du système et les observations et qui est défini de la façon suivante :
)(xyd H o . (Eq. 20)
Comme ces deux grandeurs yo et x ne sont généralement pas comparables, on applique
à x un opérateur d’observation H. On obtient ainsi un équivalent observable de l’état du
système H(x). Lorsque les états du système évoluent au cours du temps, un modèle de
propagation M permet de propager les états d’un pas de temps à l’autre. Ce modèle est aussi
entaché d’une erreur caractérisée par la matrice de covariance Q. Dans la suite de ce chapitre,
les opérateurs H et M (cursifs) représenteront respectivement l’opérateur d’observation et le
modèle de propagation non linéaires. H et M (italiques) correspondront respectivement à
l’opérateur d’observation et au modèle de propagation linéaires. Enfin H et M (gras)
représenteront les jacobiennes respectives de l’opérateur d’observation et du modèle de
propagation.
2. Description de quelques techniques d’assimilation de données
Les méthodes d’assimilation de données sont utilisées pour corriger l’état du système à
partir d’observations. La correction ne concernant généralement qu’une partie de l’état du
système, le vecteur x désignera donc le vecteur de contrôle tout au long de cette section 2. Les
méthodes présentées ci-dessous diffèrent par la manière de prendre en compte (de façon
implicite ou explicite) les erreurs liées aux différentes sources d’information et par l’approche
utilisée pour estimer l’analyse. Cette partie ne contient qu’une description très générale de
quelques méthodes d’assimilation de données. Pour plus de détails, le lecteur intéressé peut se
reporter aux thèses de Massart (2003), Ricci (2004) ou Daget (2008) dont s’inspire cette
partie.
2.1. Méthodes de Cressman et du « nudging »
Ces méthodes fournissent une analyse qui est un compromis entre les observations yo
et une ébauche xb c’est-à-dire une estimation a priori donnée par un modèle numérique. Pour
réaliser ce compromis, l’innovation qu’elles calculent est pondérée d’un coefficient dont la
valeur varie entre 0 et 1. Ce coefficient de pondération exprime de façon implicite la
confiance qu’on accorde aux observations et à l’ébauche.
2.1.1. Méthode de Cressman
La méthode de Cressman propose de modifier l’estimation a priori d’une variable
lorsque des observations de cette variable sont disponibles. Cette correction s’écrit :
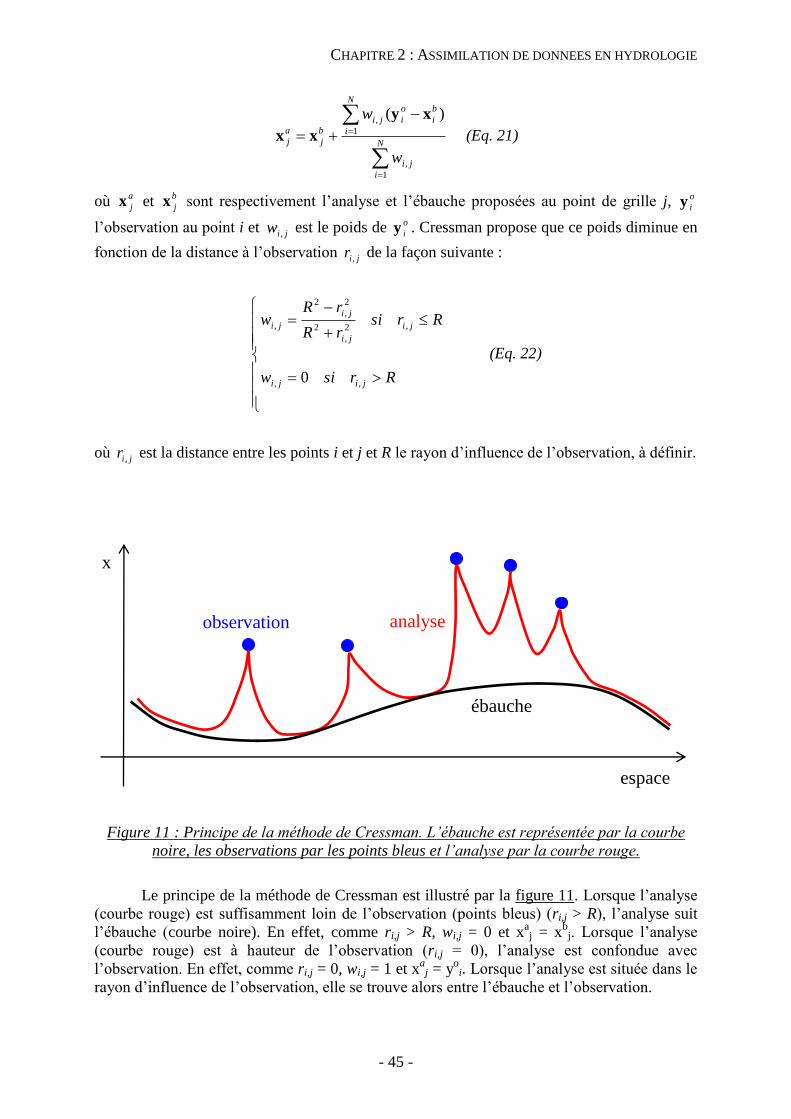
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 45 -
N
i
ji
N
i
b
i
o
iji
b
j
a
j
w
w
1
,
1
, )( xy
xx (Eq. 21)
où a
jx et b
jx sont respectivement l’analyse et l’ébauche proposées au point de grille j, o
iy
l’observation au point i et jiw , est le poids de o
iy . Cressman propose que ce poids diminue en
fonction de la distance à l’observation jir , de la façon suivante :
Rrsiw
RrsirR
rRw
jiji
ji
ji
ji
ji
,,
,2
,
2
2
,
2
,
0
(Eq. 22)
où jir , est la distance entre les points i et j et R le rayon d’influence de l’observation, à définir.
Figure 11 : Principe de la méthode de Cressman. L’ébauche est représentée par la courbe
noire, les observations par les points bleus et l’analyse par la courbe rouge.
Le principe de la méthode de Cressman est illustré par la figure 11. Lorsque l’analyse
(courbe rouge) est suffisamment loin de l’observation (points bleus) (ri,j > R), l’analyse suit
l’ébauche (courbe noire). En effet, comme ri,j > R, wi,j = 0 et xaj = x
bj. Lorsque l’analyse
(courbe rouge) est à hauteur de l’observation (ri,j = 0), l’analyse est confondue avec
l’observation. En effet, comme ri,j = 0, wi,j = 1 et xa
j = yo
i. Lorsque l’analyse est située dans le
rayon d’influence de l’observation, elle se trouve alors entre l’ébauche et l’observation.
analyse
ébauche
observation
x
espace
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 46 -
2.1.2. Méthode du « nudging »
Le « nudging » est une méthode proche de celle de Cressman : il considère l’aspect
temporel en plus. L’idée est de « pousser » le modèle numérique (fournissant l’ébauche) vers
les observations. Pour ce faire, on ajoute à l’équation différentielle permettant de décrire
l’évolution de la variable que l’on cherche à corriger un terme dit de « relaxation ». Ce terme
va forcer le modèle à tendre vers l’observation. Il correspond à l’innovation (Eq. 13) pondérée
par un coefficient à déterminer, compris entre 0 et 1. Le nudging permet ainsi de trouver
une trajectoire du modèle qui vérifie les équations du modèle tout en étant plus près des
observations. Il faut néanmoins veiller à ce que le terme de nudging ne domine pas les autres
tendances du modèle.
Si le modèle s’écrit :
)(xx
Mdt
d, (Eq. 23)
Alors l’équation incluant la correction par « nudging » est :
)()( xyxx
o
dt
dM . (Eq. 24)
Ces 2 méthodes présentent l’avantage d’être simples d’utilisation. Elles présentent
néanmoins plusieurs inconvénients. Le premier est la difficulté à déterminer de façon
objective le poids à accorder à l’innovation. Le deuxième est que toutes les observations,
quelles que soient leurs erreurs, sont traitées avec la même confiance. Le troisième est le
caractère univarié de l’analyse. Autrement dit, l’opérateur d’observation est égal à l’unité
dans les équations 21 et 24 (H = 1) et yo et x doivent être dans le même espace. Concernant la
méthode de Cressman, le risque est aussi que l’analyse ne respecte pas forcément la physique
du modèle numérique utilisé pour fournir l’ébauche. Il est donc difficile de repartir d’une
intégration de cet état analysé.
Des méthodes plus sophistiquées permettent de pallier à ces inconvénients en représentant la
statistique des erreurs liées à l’ébauche et à chacune des observations.
2.2. Les méthodes de type filtrage
Les erreurs sont caractérisées par leurs variances contenues dans les matrices de
covariances d’erreurs d’ébauche B et d’observations R. Ces méthodes reposent sur
l’hypothèse de linéarité de l’opérateur d’observation H et du modèle de propagation M (les
opérateurs linéaires seront notés H et M). Elles permettent d’estimer une matrice de gain K à
partir des matrices B et R. Cette matrice de gain est l’équivalent du coefficient de pondération
intervenant dans les méthodes précédentes. Ces méthodes de filtrage présentent l’avantage de
déterminer de façon explicite la matrice de gain K. Cependant, la détermination de K
nécessite le stockage et l’inversion des matrices B et/ou R ce qui rend leur utilisation très
coûteuse pour des systèmes de grandes dimensions. Ces méthodes estiment l’analyse à un

CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 47 -
temps donné. Selon que x contient des états statiques (comme les paramètres d’un modèle
numérique) ou dynamiques (comme les variables d’état d’un modèle numérique), on peut
décider de cycler ou non l’analyse dans le temps. C’est ce qui différencie le BLUE (où
l’analyse n’est pas cyclée dans le temps) du filtre de Kalman (où l’analyse est cyclée dans le
temps).
2.2.1. Le Best Linear Unbiased Estimator (BLUE)
Cette technique cherche à identifier le Meilleur Estimateur Linéaire non Biaisé ou Best
Linear Unbiased Estimator (BLUE) [Gelb, 1974]. Elle propose une estimation de l’analyse xa
à un instant donné. Cette dernière est une combinaison linéaire de l’ébauche xb et des
observations yo :
obaKyLxx (Eq. 25)
où L est une matrice et K est la matrice de gain.
Dans cette méthode, les erreurs associées à l’ébauche b, aux observations
o et à
l’analyse a sont supposées non biaisées. La moyenne de ces erreurs est donc nulle. On a
alors :
0)( aE ε
0)( taE xx
0)( tobE xKyLx En remplaçant x
b par x
t +
b et en supposant une relation linéaire entre y
o et x
ototo H εHxxy )( ,
on obtient :
0))()(( totbtE xεHxKεxL
0)( totbtE xKεKHxLεLx
0)()()()( obt EEE εKεLxIKHL
Ceci conduit à :
KHIL , (Eq. 26)
En remplaçant L par I-KH dans l’équation (Eq. 25), on obtient :
))( bobaHxyKxx . (Eq. 27)
La détermination de l’analyse nécessite donc l’estimation de la matrice de gain K.
Cette dernière doit être telle que l’analyse xa soit la plus proche possible de l’état vrai x
t.
L’erreur sur l’analyse a = x
a - x
t étant supposée en moyenne nulle, l’analyse est d’autant plus
proche de l’état vrai que sa variance est faible. Les variances sont stockées dans la matrice de
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 48 -
covariances d’erreur A dont l’expression s’obtient en développant E[a
aT] [Bouttier et
Courtier, 1999] :
TTKRKKHIBKHIA )()( , (Eq. 28)
La variance de l’erreur d’analyse étant représentée par la trace de A10
, l’analyse est telle que
Tr(A) est minimum, autrement dit :
)()(2)()()( TTTTT TrTrTrTrTr KRKKBHKKHBHBA . (Eq. 29)
Cette fonction étant continue et dérivable par rapport à K on peut calculer et annuler la
dérivée de Tr(A). Ceci nous permet d’estimer la matrice de gain K :
1)( RHBHBHKTT . (Eq. 30)
On peut ensuite estimer l’état analysé (Eq. 31) et sa matrice de covariance d’erreur (Eq. 32)
en remplaçant K dans l’équation (Eq. 27) :
))(()( 1 boTTba H xyRHBHBHxx , (Eq. 31)
BKHIA )( . (Eq. 32)
Si les fonctions de densité de probabilité des erreurs d’ébauche, d’observation sont
gaussiennes, alors le calcul du BLUE permet de trouver l’état optimal défini comme
l’estimateur du minimum de variance. Dans le cas où ces erreurs ne sont pas gaussiennes, le
BLUE ne correspond pas à une solution optimale.
2.2.2. Le filtre de Kalman et ses variantes
Filtre de Kalman
Le filtre de Kalman est une extension du BLUE pour un système dynamique. Il s’agit
d’un BLUE cyclé dans le temps. L’analyse est toujours estimée de la même manière. Les
équations sont cette fois-ci indicées au temps d’observation k.
Le calcul du gain s’écrit :
1)( RHHBHBKT
k
T
k . (Eq. 33)
L’analyse et sa matrice de covariance d’erreur au temps k sont alors estimées :
))](([)()( kHkk bobaxyKxx , (Eq. 34)
10
La trace d’une matrice carrée A est définie comme la somme de ses termes diagonaux. Elle est notée Tr(A).
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 49 -
kk BKHIA )( . (Eq. 35)
Le filtre de Kalman contient ensuite deux étapes supplémentaires qui permettent la
propagation de l’état analysé et de sa matrice de covariance d’erreur dans le temps. La
propagation de l’état analysé fait intervenir le modèle de propagation Mk,k+1. Celui-ci permet
de propager l’état analysé du pas de temps d’observation k au pas de temps d’observation
k+1 :
)]([)1( 1, kMk a
kk
bxx (Eq. 36)
La propagation de la matrice de covariance d’erreur d’analyse A fait intervenir le
jacobien M du modèle de propagation Mk,k+1 défini par (Eq. 37) et la matrice de covariance
d’erreur modèle Q (Eq. 38).
xM
1,kkM, (Eq. 37)
QMMAB
T
kk 1 (Eq. 38)
Comparé au BLUE, le filtre de Kalman présente l’avantage de propager la matrice de
covariance d’erreur d’analyse A d’un temps d’observation à l’autre. L’inconvénient est que la
propagation de cette matrice A peut s’avérer coûteuse et l’estimation de la matrice Q difficile.
Filtre de Kalman étendu (EKF)
On peut étendre l’utilisation du filtre de Kalman à des opérateurs d’observation H et à
des modèles de propagation Mk,k+1 non linéaires. On parle alors de filtre de Kalman étendu.
Les jacobiens H et M des opérateurs H et Mk,k+1 s’écrivent alors :
xH
H
(Eq. 39)
xM
1,kkM (Eq. 40)
Le jacobien H est ensuite utilisé dans le calcul du gain K (Eq. 33) et de la matrice A (Eq.
35), l’opérateur non linéaire H intervenant uniquement dans le calcul de l’analyse xa (Eq. 34)
pour déterminer l’innovation.
Le jacobien M sert à propager la matrice A (Eq. 38) alors que le modèle non linéaire M
est utilisé pour propager l’état analysé xa (Eq. 36).
L’EKF présente l’avantage de pouvoir s’utiliser avec des modèles de propagation non
linéaires. Cependant, il n’est valable que pour des modèles de propagation faiblement non
linéaires pour lesquels la linéarisation est valable sur un petit intervalle [x ; x+dx].Autrement
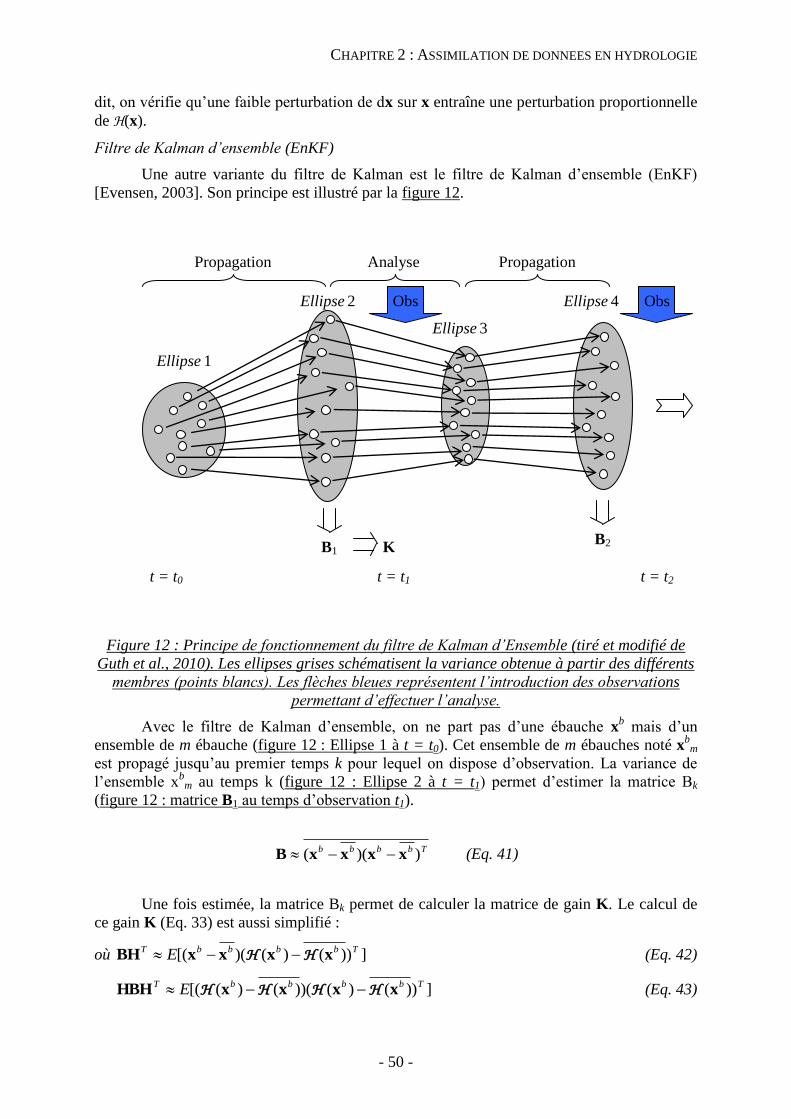
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 50 -
dit, on vérifie qu’une faible perturbation de dx sur x entraîne une perturbation proportionnelle
de H(x).
Filtre de Kalman d’ensemble (EnKF)
Une autre variante du filtre de Kalman est le filtre de Kalman d’ensemble (EnKF)
[Evensen, 2003]. Son principe est illustré par la figure 12.
Figure 12 : Principe de fonctionnement du filtre de Kalman d’Ensemble (tiré et modifié de
Guth et al., 2010). Les ellipses grises schématisent la variance obtenue à partir des différents
membres (points blancs). Les flèches bleues représentent l’introduction des observations
permettant d’effectuer l’analyse.
Avec le filtre de Kalman d’ensemble, on ne part pas d’une ébauche xb mais d’un
ensemble de m ébauche (figure 12 : Ellipse 1 à t = t0). Cet ensemble de m ébauches noté xb
m
est propagé jusqu’au premier temps k pour lequel on dispose d’observation. La variance de
l’ensemble xb
m au temps k (figure 12 : Ellipse 2 à t = t1) permet d’estimer la matrice Bk
(figure 12 : matrice B1 au temps d’observation t1).
Tbbbb ))(( xxxxB (Eq. 41)
Une fois estimée, la matrice Bk permet de calculer la matrice de gain K. Le calcul de
ce gain K (Eq. 33) est aussi simplifié :
où ]))()()([( TbbbbT E xxxxBH HH (Eq. 42)
]))()()()()([( TbbbbT E xxxxHBH HHHH (Eq. 43)
Propagation Analyse Propagation
Obs
B1 K B2
Obs
t = t0 t = t1 t = t2
Ellipse 1
Ellipse 2
Ellipse 3
Ellipse 4

CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 51 -
L’analyse est ensuite déterminée pour chaque membre m de l’ensemble (figure 12 :
Ellipse 3 au temps d’observation t = t1) comme suit :
))(( b
m
ob
m
a
m xyKxx H (Eq. 44)
L’analyse de chaque membre au temps d’observation k est ensuite propagée au temps
d’observation suivant (k+1) par le modèle de propagation non linéaire pour obtenir l’ébauche
au temps k+1(Eq. 45). On obtient ainsi l’ensemble d’ébauche au temps d’observation k+1
(figure 12 : Ellipse 4 au temps d’observation t = t2).
))(()1( 1, kk a
mkk
b
m xx M (Eq. 45)
La matrice Bk+1 au temps d’observation k+1 n’est plus estimée par propagation de la
matrice de covariance d’erreur d’analyse Ak du temps k au temps k+1. Elle est déterminée par
la variance de l’ensemble des analyses propagées au temps k+1.
]))1()1()()1()1([(1
Taaaa
k kkkkE xxxxB (Eq. 46)
Le filtre de Kalman d’ensemble permet ainsi d’économiser la propagation explicite de
B (cf. Eq. 38) (parfois très coûteuse en temps de calcul).
Cette méthode permet donc d’éviter le calcul de la jacobienne M et ainsi la
propagation explicite de B. Néanmoins, procéder à m intégration du modèle de propagation M
peut s’avérer très coûteux ce qui peut amener à utiliser un échantillon de taille réduite (de 10
membres). Dans ce cas, il faut veiller à ce que l’erreur d’analyse ne devienne pas négligeable
par rapport à l’erreur d’observation en introduisant par exemple une erreur modèle dans
l’équation 45.
2.3. Les méthodes variationnelles
Dans ces méthodes, les erreurs sont aussi caractérisées par leurs variances contenues
dans les matrices de covariances d’erreurs d’ébauche B et d’observations R. Ces méthodes
variationnelles permettent de traiter des opérateurs d’observation et des modèles de
propagation non linéaires. Elles ne cherchent pas à calculer un gain K mais à minimiser une
fonction coût. Celle-ci quantifie la distance du vecteur de contrôle x à la fois à l’ébauche xb et
aux observations yo. Ces méthodes présentent l’avantage de pouvoir traiter des matrices B et
R de grande dimension. On distingue là aussi deux méthodes selon que l’estimation de
l’analyse se fait à un instant donné (3D VAR) ou se propage au cours du temps (4D VAR).
2.3.1. La méthode du 3D-VAR
Le 3D-VAR estime l’analyse à un instant donné. Il cherche l’état x qui minimise la
fonction coût J(x) suivante :
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 52 -
))(())((2
1)()(
2
1)( 11
xyRxyxxBxxx HH oTobTbJ (Eq. 47)
La fonction coût J(x) quantifie donc d’une part la distance du vecteur x à l’ébauche xb et
d’autre part la distance de H(x) aux observations yo. L’opérateur d’observation H
potentiellement non linéaire fournit un équivalent observable H(x) du vecteur x. La distance à
l’ébauche est pondérée par l’inverse de sa matrice de covariance B alors que la distance aux
observations est pondérée par l’inverse de leur matrice de covariance R.
Cette fonction coût est minimale lorsque son gradient s’annule :
0))(()()( 11 xyRHxxBx HoTbJ (Eq. 48)
En posant )()()( bbx xxHx HH , l’état analysé satisfait alors l’équation :
)]([)( 1 boTTbaxyRHBHBHxx H (Eq. 49)

CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 53 -
où H est la jacobienne de l’opérateur d’observation non linéaire H. Dans le cas d’un opérateur
d’observation linéaire H, on retombe sur la solution du BLUE. Dans ce dernier cas, l’analyse
peut s’obtenir analytiquement par l’équation 27 ou par un processus iterative permettant de
minimiser le gradient de la function coût (Eq. 48).
L’annulation du gradient se fait par itérations en partant d’une condition initiale x = xb.
Chaque itération nécessite l’évaluation de la fonction coût et de son gradient. Cela nécessite
donc une intégration de l’opérateur d’observation H à chaque itération ce qui peut s’avérer
être un inconvénient. Contrairement aux méthodes de filtrage où le calcul du gain K fait
intervenir des produits matrice-matrice, l’avantage du 3D-VAR est que l’évaluation de la
fonction coût et de son gradient ne fait intervenir que des produits vecteur-matrice qui ne
nécessitent pas de stocker l’intégralité des matrices B et R. En pratique, on fait un
changement de variable pour se placer dans l'espace des vecteurs propres de la matrice B.
Ceci permet de traiter des matrices B et R de grande dimension.
2.3.2. La méthode du 4D-VAR
Le 4D-VAR est une extension du 3D-VAR. Cette méthode effectue une analyse non
plus à un instant donné mais sur une fenêtre temporelle d’assimilation. Tout comme le 3D-
VAR, la fonction coût à minimiser fait intervenir l’écart à l’ébauche et l’écart aux
observations. La seule différence est que la fonction coût du 4D-VAR fait intervenir un
modèle de propagation i0M a priori non linéaire qui permet de propager l’état x du temps t0
au temps ti :
)()(, 0 xx iiti M , où x = x(t0) est la condition initiale
Alors que la fonction coût du 3D-VAR peut s’écrire :
n
i
o
iiii
To
iii
bTb ttJ0
11 ))]([())]([(2
1)()(
2
1)( yxRyxxxBxxx HH (Eq. 50)
La fonction coût du 4D-VAR s’écrit :
n
i
o
iiii
To
iii
bTbJ0
0
1
0
1 ))]([())]([(2
1)()(
2
1)( yxRyxxxBxxx MHMH (Eq. 51)
où Ri est la matrice de covariance d’erreur d’observation et Hi l’opérateur d’observation a
priori non linéaire au temps ti. A chaque temps d’observation ti, l’équivalent observable
Hi[x(ti)] de l’état x est comparé aux observations o
iy . Cette fonction est minimisée en annulant
son gradient :
n
i
o
iiii
T
i
T
i
bJ0
0
1
0
1 0))]([()()( yxRHMxxBx MH (Eq. 52)
où Hi et i0M sont respectivement les jacobiennes des opérateurs d’observation non linéaires
Hi et i0M . Comme le 3D-VAR, cette méthode présente l’avantage de s’appliquer à des
systèmes de grande dimension et l’inconvénient de minimiser son gradient de façon itérative,

CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 54 -
chaque itération nécessitant une intégration de l’opérateur d’observation H et du modèle de
propagation i0M .
2.4. Les méthodes de « prévision des erreurs »
Les méthodes de prévision des erreurs sont des méthodes fréquemment utilisées en
hydrologie pour corriger les prévisions de débits. A la différence des précédentes qui
reconnaissaient le caractère imparfait des observations assimilées et cherchaient un
compromis entre les états modélisés et observés, elles reposent sur la structure statistique de
l’erreur existante entre les débits simulés par un modèle et les débits observés. Ces erreurs
sont souvent autocorrélées. Il est donc possible connaissant l’erreur à t de prévoir l’erreur à
t+1. Plusieurs types de modèles peuvent alors être utilisés pour prévoir ces erreurs. Nous
allons ici simplement décrire le principe d’un modèle autorégressif, modèle fréquemment
utilisé pour ce type de prévision. Il faut noter qu’ici le terme d’ « erreur » fait référence à
l’écart entre l’observation et son équivalent modèle. Il s’agit donc d’une sorte d’innovation.
La première étape consiste à calculer les écarts entre les débits simulés et les débits
observés :
iii QQe ˆ , (Eq. 53)
où iQ̂ est le débit simulé au temps i, iQ est le débit observé au temps i et ei est l’erreur entre
débits simulé et observé au temps i.
La deuxième étape consiste à débiaiser ces erreurs :
eeii , (Eq. 54)
où i est l’erreur débiaisée, ei l’erreur biaisée et e la moyenne des erreurs biaisées
La troisième étape consiste à trouver une relation entre l’erreur débiaisée au temps i et
l’erreur débiaisée au temps i+1 :
ii a 1ˆ , (Eq. 55)
où 1ˆi est l’erreur débiaisée prévue au temps i+1, i est l’erreur débiaisée au temps i et a le
coefficient du modèle autorégressif qu’on peut estimer par la méthode des moindres carrés
ordinaires [Xiong et O’Connor, 2002]. Le modèle autorégressif décrit ici est très simple et ne
fait intervenir que l’erreur au temps i pour prévoir l’erreur à i+1. On peut complexifier le
modèle en faisant intervenir les erreurs aux temps i-1, i-2, … .
La quatrième étape consiste à ajouter au débit simulé à i+1 l’erreur débiaisée prévue à
i+1 et l’erreur moyenne pour obtenir le débit simulé corrigé.
eQQ iii 111ˆˆˆ̂ , (Eq. 56)
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 55 -
Où 1
ˆ̂iQ est le débit simulé corrigé à i+1, 1
ˆiQ est le débit simulé à i+1, 1
ˆi est l’erreur prévue
à i+1 et e est la moyenne des erreurs biaisées.
L’avantage de cette méthode est qu’elle est simple d’utilisation et qu’elle s’adapte à
tous les types de modèles notamment les modèles de type « boîte noire ». L’inconvénient de
cette méthode est que la correction n’est efficace que pour des délais de prévision très courts.
De plus, ce genre de méthode n’est utilisable que pour corriger des débits en assimilant des
débits. Elle ne permet pas d’assimiler d’autres données (comme des humidités) ou de corriger
autre chose que des débits.
3. Utilisation des techniques d’assimilation de données en hydrologie
L’assimilation de données est utilisée dans trois situations différentes : l’interpolation,
le lissage (smoothing) et le filtrage (filtering) [MacLaughlin, 2002].
On parle d’interpolation lorsque la variable d’intérêt estimée par assimilation de
données ne varie pas dans le temps.
Le terme de lissage est utilisé pour les situations de réanalyse : la variable d’intérêt
varie dans le temps et on cherche à la corriger pour mieux estimer son évolution passée et
présente. Dans ce cas, l’assimilation de données et le modèle opèrent sur la même période.
C’est ce que Bouttier et Courtier (1999) appellent l’assimilation de données non séquentielle
(figure 13).
Le terme de filtrage est utilisé pour des situations de prévision : la variable d’intérêt
varie dans le temps. On cherche cette fois-ci à corriger les états antérieurs de cette variable
pour mieux prévoir ses états futurs. L’assimilation de données est alors utilisée jusqu’au
temps présent et le modèle est ensuite utilisé seul sur la période future. C’est ce que Bouttier
et Courtier (1999) appellent l’assimilation de données séquentielle (figure 13).
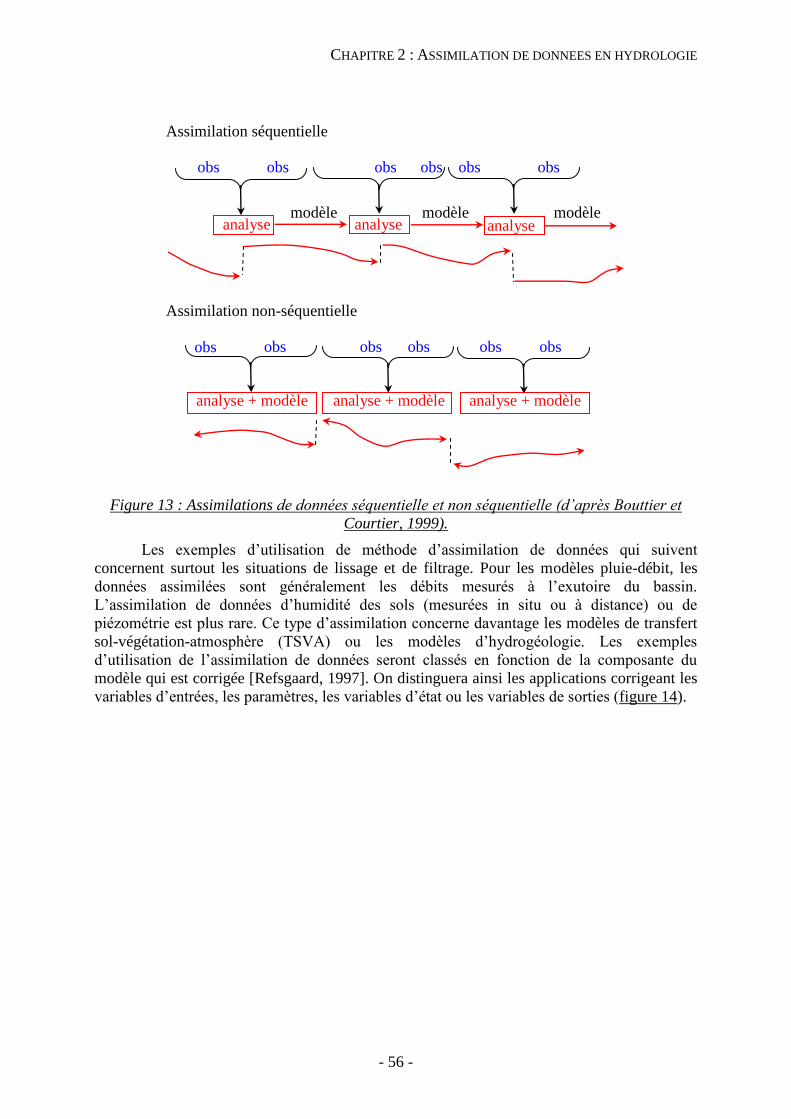
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 56 -
Figure 13 : Assimilations de données séquentielle et non séquentielle (d’après Bouttier et
Courtier, 1999).
Les exemples d’utilisation de méthode d’assimilation de données qui suivent
concernent surtout les situations de lissage et de filtrage. Pour les modèles pluie-débit, les
données assimilées sont généralement les débits mesurés à l’exutoire du bassin.
L’assimilation de données d’humidité des sols (mesurées in situ ou à distance) ou de
piézométrie est plus rare. Ce type d’assimilation concerne davantage les modèles de transfert
sol-végétation-atmosphère (TSVA) ou les modèles d’hydrogéologie. Les exemples
d’utilisation de l’assimilation de données seront classés en fonction de la composante du
modèle qui est corrigée [Refsgaard, 1997]. On distinguera ainsi les applications corrigeant les
variables d’entrées, les paramètres, les variables d’état ou les variables de sorties (figure 14).
analyse + modèle analyse + modèle analyse + modèle
obs obs obs obs obs obs
Assimilation non-séquentielle
modèle modèle modèle
obs
analyse analyse analyse
obs obs obs obs obs
Assimilation séquentielle
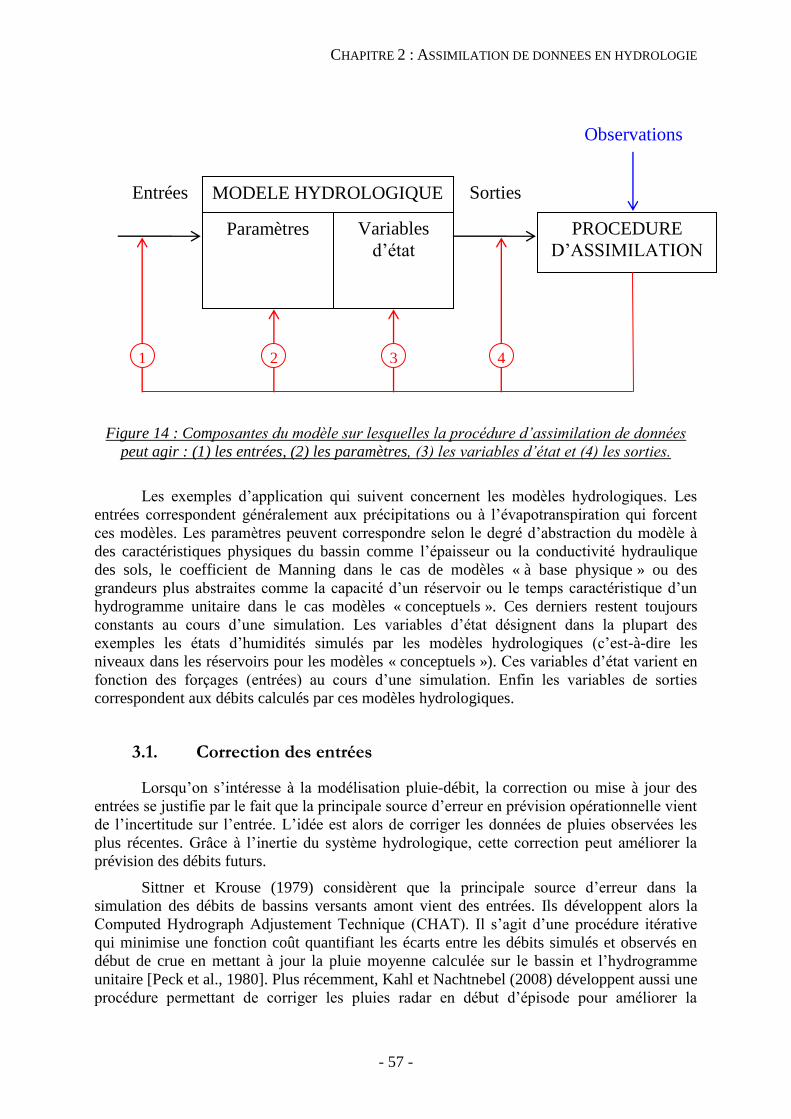
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 57 -
Figure 14 : Composantes du modèle sur lesquelles la procédure d’assimilation de données
peut agir : (1) les entrées, (2) les paramètres, (3) les variables d’état et (4) les sorties.
Les exemples d’application qui suivent concernent les modèles hydrologiques. Les
entrées correspondent généralement aux précipitations ou à l’évapotranspiration qui forcent
ces modèles. Les paramètres peuvent correspondre selon le degré d’abstraction du modèle à
des caractéristiques physiques du bassin comme l’épaisseur ou la conductivité hydraulique
des sols, le coefficient de Manning dans le cas de modèles « à base physique » ou des
grandeurs plus abstraites comme la capacité d’un réservoir ou le temps caractéristique d’un
hydrogramme unitaire dans le cas modèles « conceptuels ». Ces derniers restent toujours
constants au cours d’une simulation. Les variables d’état désignent dans la plupart des
exemples les états d’humidités simulés par les modèles hydrologiques (c’est-à-dire les
niveaux dans les réservoirs pour les modèles « conceptuels »). Ces variables d’état varient en
fonction des forçages (entrées) au cours d’une simulation. Enfin les variables de sorties
correspondent aux débits calculés par ces modèles hydrologiques.
3.1. Correction des entrées
Lorsqu’on s’intéresse à la modélisation pluie-débit, la correction ou mise à jour des
entrées se justifie par le fait que la principale source d’erreur en prévision opérationnelle vient
de l’incertitude sur l’entrée. L’idée est alors de corriger les données de pluies observées les
plus récentes. Grâce à l’inertie du système hydrologique, cette correction peut améliorer la
prévision des débits futurs.
Sittner et Krouse (1979) considèrent que la principale source d’erreur dans la
simulation des débits de bassins versants amont vient des entrées. Ils développent alors la
Computed Hydrograph Adjustement Technique (CHAT). Il s’agit d’une procédure itérative
qui minimise une fonction coût quantifiant les écarts entre les débits simulés et observés en
début de crue en mettant à jour la pluie moyenne calculée sur le bassin et l’hydrogramme
unitaire [Peck et al., 1980]. Plus récemment, Kahl et Nachtnebel (2008) développent aussi une
procédure permettant de corriger les pluies radar en début d’épisode pour améliorer la
MODELE HYDROLOGIQUE
Paramètres Variables
d’état
PROCEDURE
D’ASSIMILATION
4 2 1 3
Entrées Sorties
Observations
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 58 -
prévision des débits à l’exutoire d’un bassin autrichien de 1000 km2. Leur procédure consiste
à appliquer un plan de correction à la pluie radar d’origine. Ce plan de correction est défini
par trois coefficients (A, B et C) qu’ils ajustent en minimisant une fonction coût quantifiant
l’écart entre les débits simulés et observés en début de crue.
Les deux procédures précédemment citées s’apparentent à des méthodes
variationnelles puisqu’elles minimisent une fonction coût. Néanmoins, la fonction coût
utilisée ne quantifie que l’écart entre débits observés et simulés et n’inclut pas d’écart à une
idée a priori de la valeur des pluies. Ces méthodes font donc entièrement confiance à la
donnée assimilée qui correspond dans les deux cas aux premiers débits observés à l’exutoire
du bassin. Même s’il est reconnu que l’erreur sur les pluies est la principale source
d’incertitude des prévisions de débits, ce type de correction est rare en pratique car
l’ajustement reste difficile. En effet, les données assimilées étant souvent des données de
débit, les entrées ne sont reliées que très indirectement aux données assimilées [Moore et al.,
2005].
D’autres données peuvent être assimilées afin de corriger les précipitations.
Chumchean et al. (2006) utilisent un filtre de Kalman pour corriger en temps réel les pluies
estimées par un radar météorologique en assimilant des données de pluies fournies par un
réseau de pluviomètres au sol. Lorsque la réponse des bassins est en partie définie par la fonte
des neiges, l’assimilation d’images satellites du couvert nival [Carroll, 1979 in Peck et al.,
1980] ou d’équivalents eau mesurés par des nivomètres [He et al., 2011] peut améliorer la
prévision des débits sur ces bassins.
La correction des entrées est souvent associée à la correction d’autres composantes du
modèle. Dans la technique CHAT, la correction des pluies est associée à une correction de
l’hydrogramme unitaire. Kahl et Nachtnebel (2008) remarquent qu’associer la correction des
pluies à une méthode de correction des débits en sortie (par prévision des erreurs) donne de
meilleurs résultats qu’une correction seule des pluies. La correction de plusieurs composantes
du modèle peut aussi s’effectuer par assimilation de plusieurs types de données. Seo et al.
(2003) utilisent une méthode d’assimilation de données variationnelle pour corriger la pluie,
l’évapotranspiration et les états d’humidité du modèle Sacramento (SAC) en utilisant des
données horaires de pluies, de débits et des estimations climatologiques de
l’évapotranspiration potentielle.
Les modèles hydrauliques utilisés pour la prévision des débits cherchent aussi à
corriger les données qui leur sont fournies en entrée. Celles-ci correspondent à des chroniques
de débits amont. Nelly et al. (2010) utilisent un modèle hydraulique pour reproduire
l’évolution des hauteurs d’eau d’une portion du Rhône pour le contrôle automatique
d’aménagements hydroélectriques. Ils utilisent le filtre de Kalman étendu pour reconstituer
des chroniques de débits amont à partir de mesures de hauteurs d’eau situées en aval. Ricci et
al. (2011) utilisent un modèle hydraulique pour prévoir les hauteurs d’eau et les débits de
l’Adour. Pour améliorer les prévisions, ils utilisent le BLUE pour corriger les chroniques de
débits amont en assimilant des données de hauteurs d’eau.
3.2. Correction des paramètres
D’après Moore et al. (2005), la correction des paramètres est utilisée sur des modèles
très simples de type « boîte noire » pour lesquels la mise à jour des paramètres compense
l’inadéquation de la dynamique du modèle avec la réalité. Cette approche n’est donc pas
recommandée car des paramètres variant dans le temps sont le reflet d’une structure de
modèle imparfaite. Les paramètres sont donc vus comme des invariants temporels
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 59 -
caractérisant le fonctionnement du bassin versant. Ils peuvent aussi être vus comme des
quantités « abstraites » ou « commodes » de nature incertaine [Mantovan et Todini, 2006] qui
contiennent une grande partie des incertitudes de modélisation. En effet, quelle que soit la
nature du modèle pluie-débit utilisé, la valeur de ces paramètres doit être calibrée. Comme
cela a été décrit au chapitre 1, la calibration implique des choix (subjectif) de fonction coût,
d’algorithme d’optimisation qui vont conditionner les valeurs des paramètres. Elle permet
également de compenser les incertitudes liées à la structure (toujours imparfaite) des modèles
et aux observations. Enfin, la calibration dépend aussi de la diversité des situations
hydrologiques contenues dans les données qui lui sont destinées. Ainsi, selon ce deuxième
point de vue, la correction des paramètres peut se justifier par la nature forcément imparfaite
des modèles hydrologiques et les incertitudes contenues dans les données utilisées dans le
processus de calibration. Malgré tout la correction des paramètres reste rare.
Bessière et al. (2007) utilisent une méthode variationnelle d’assimilation de données
en mode réanalyse (donc en lissage) pour estimer les valeurs des paramètres les plus sensibles
du modèle MARINE (conductivité hydraulique K, épaisseur de sol Z et coefficient de
Manning nd). La méthode repose sur la minimisation d’une fonction coût qui quantifie
seulement l’écart aux débits observés. Elle utilise l’adjoint du modèle pour calculer le
gradient de cette fonction coût. Les résultats sont semblables à ceux d’une méthode
d’optimisation de type Monte Carlo plus coûteuse en temps de calcul. Même si les valeurs
optimisées des paramètres restent physiquement acceptables, elles sont loin des valeurs de
départ (environ 6 fois la valeur de départ pour K, 4 fois la valeur de départ pour Z et la moitié
de la valeur de départ pour nd).
Yang et Michel (2000) proposent une méthode de mise à jour des paramètres du
modèle GR4J en mode prévision (donc en filtrage). Ils choisissent une fenêtre de 60 jours
avant la date de prévision, période suffisamment longue pour que la correction ait un effet. Ils
font varier un à un les paramètres du modèle par rapport à leur valeur de base. Si la mise à
jour diminue l’écart entre débits simulés et observés sur la fenêtre de 60 jours alors la mise à
jour est conservée. Dans le cas contraire, les valeurs de base sont maintenues. Ceci permet de
ne pas trop s’écarter du jeu initial de paramètres. Cette méthode donne de meilleurs résultats
qu’une méthode de prévision des erreurs (correction des sorties) couramment utilisée en
hydrologie.
Les deux méthodes présentées ici s’apparentent à des méthodes variationnelles et
assimilent avec une confiance absolue des données de débits. Loumagne et al. (2001)
aménagent la méthode de Yang et Michel (2000) en ajoutant un critère calculant un écart
entre les humidités mesurées in situ et les humidités calculées par le modèle. Cet écart doit
être inférieur à l’écart-type de la mesure d’humidité, pondéré par un coefficient dont la valeur
dépend de la confiance que l’on accorde aux données d’humidité assimilées. La méthode ainsi
aménagée est appliquée au modèle GRHUM sur le bassin de la Seine et comparée à la
méthode d’origine. Les résultats montrent que l’assimilation de données d’humidité permet
une amélioration des prévisions. Weisse et al. (2003) étendent cette méthode sur 4 sous
bassins de la Seine.
Da Ros et Borga (1997) corrigent la condition initiale et un paramètre contrôlant la
distribution des réservoirs de production de leur modèle conceptuel global en minimisant une
fonction coût qui quantifie uniquement l’écart entre les débits observés et simulés. La
comparaison avec une correction des variables d’état du même modèle par un filtre de
Kalman étendu montre que la correction des états est plus efficace.
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 60 -
Malgré les bons résultats obtenus par ces méthodes, la correction des paramètres reste
rare et les méthodes utilisées assez rudimentaires avec une confiance absolue aux débits
observés.
3.3. Correction des variables d’état
Les variables d’état évoluent dans le temps en fonction des forçages (entrées) auxquels
le modèle est soumis. Les erreurs importantes commises sur les forçages se répercutent sur
l’estimation des variables d’état et par la suite sur les débits prévus [Blöschl et al., 2008]. Il
est donc logique de corriger les variables d’état du modèle pour obtenir de meilleures
prévisions de débits. Cette correction est beaucoup plus fréquente que les précédentes car les
variables d’état se relient plus facilement aux données assimilées. Dans le modèle GRP
(Génie Rural pour la Prévision), les débits à l’exutoire peuvent être reliés au niveau dans le
réservoir de transfert le plus en aval du modèle [Tangara, 2005]. Dans le modèle GRHUM, le
niveau dans le réservoir de production peut être relié aux humidités des sols mesurées à
distance [Quesney et al., 2000] ou in situ [Loumagne et al., 2001].
La mise à jour des états peut se faire soit de façon complète (pour que la simulation
colle exactement à l’observation) soit de façon partielle [Refsgaard, 1997]. Différentes
techniques sont alors adoptées. Tangara (2005) propose une mise à jour totale du niveau dans
le réservoir de transfert du modèle GRP pour que le dernier débit simulé colle au débit
observé. Celle-ci permet d’améliorer les prévisions aux horizons de prévision les plus courts.
Bien qu’efficace, cette correction ne prend pas en compte l’erreur sur le dernier débit observé.
D’autres techniques, prenant en compte les erreurs d’observation ont été testées. Thirel et al.
(2010) utilisent un BLUE sur une fenêtre d’assimilation qui prend en compte les débits
observés pour corriger l’humidité des couches racinaire et profonde du modèle SIM. Cette
correction conduit à de meilleures prévisions d’ensemble des débits. Wöhling et al. (2006)
minimisent une fonction coût quantifiant l’écart entre débits observés et simulés en montée de
crue pour corriger la variable d’état du réservoir superficiel de production du ruissellement du
modèle conceptuel PREVAH. Cette correction permet une amélioration des prévisions de
débits pour des horizons plus longs qu’une méthode classique de correction des sorties.
D’autres auteurs utilisent des variantes du filtre de Kalman. C’est le cas de Da Ros et Borga
(1997) qui assimilent des données de débits avec un filtre de Kalman étendu pour corriger les
états de leur modèle conceptuel global. Cette correction est plus efficace qu’une correction
des paramètres. Blöschl et al. (2008) utilisent sur un bassin autrichien, Kamp de 622 km2, un
filtre de Kalman d’ensemble pour corriger les états d’humidité à l’aide des débits observés à
l’exutoire du bassin. L’amélioration des prévisions de débit se fait sur un délai plus long
qu’avec une méthode de correction des sorties. Le filtre de Kalman étendu peut aussi être
utilisé pour assimiler d’autres données que les débits observés. Loumagne et al. (2001)
utilisent cette technique sur un sous bassin de la Seine pour corriger les états de surface et
racinaire du modèle GRHUM en assimilant des données d’humidité mesurées à distance.
Cette correction entraîne une amélioration des prévisions de débits. Aubert et al. (2003)
utilisent cette technique sur le modèle GR4J appliqué au sous bassin de la Seine pour
assimiler en plus des données de débits, des mesures d’humidité des sols mesurées in situ. Ils
constatent que l’assimilation des mesures d’humidité est plus efficace en période de crue
contrairement à l’assimilation des débits observés, plus efficace en période d’étiage.
La correction des variables d’état du modèle semble donc assez courante et fait l’objet
de nombreuses recherches. Les données assimilées sont variées : débits, humidités mesurées
in situ ou à distance. Les méthodes testées pour assimiler ces données sont aussi variées allant
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 61 -
de la mise à jour complète des états [Tangara, 2005] à une mise à jour partielle (BLUE, filtres
de Kalman étendu ou d’ensemble). La correction des états d’humidité est également souvent
utilisée pour corriger les simulations des modèles TSVA [Thirel, 2010].
3.4. Correction des sorties
Pour les modèles pluie-débit, il arrive souvent que les erreurs entre débits simulés et
débits observés soient autocorrélées. La correction des sorties se fait donc par des méthodes
de correction de cette erreur. Celles-ci tentent de tirer profit de l’autocorrélation des erreurs
pour prévoir l’erreur entre débit simulé et observé au temps t+1 en connaissant l’erreur au
temps t. Selon Ahsan et O’ Connor (1994), c’est de loin le type de technique le plus populaire
parmi les hydrologues [Refsgaard, 1997]. Ces techniques sont simples à mettre en œuvre et ne
sont pas imbriquées avec le modèle hydrologique. Elles restent extérieures au modèle ce qui
leur permet de s’adapter à tous les types de modèles et notamment aux modèles de type
« boîte noire » où le lien entre les paramètres ou variables d’état et les observations reste
difficile. Comparé à la correction des autres composantes du modèle, ce type de correction
n’est efficace que pour des délais de prévision très courts (de quelques heures). De plus,
l’autocorrélation peut être plus faible à proximité de la montée et du pic de crue qui est la
période où se fait l’assimilation en prévision [Moore et al., 2005]. Ce type de méthode n’est
pas évolutif. Autrement dit, il ne permet que de corriger les débits en assimilant des débits.
Pour corriger les sorties, il existe différentes méthodes comme les fonctions de
transfert, les modèles autorégressifs, les réseaux de neurones artificiels ou la programmation
génétique. Ces méthodes de correction des sorties peuvent s’utiliser seules ou couplées à des
méthodes corrigeant d’autres composantes du modèle. Certains auteurs ont comparé les
méthodes de correction des sorties entre elles. Xiong et O’Connor (2002) comparent 4
méthodes de correction des erreurs : un modèle autorégressif (AR) un modèle autorégressif à
seuil (AR-S) un modèle flou autorégressif à seuil (F-AR-S) et un réseau de neurones
artificiels. Ces méthodes corrigent les débits en sortie du modèle SMAR appliqué sur 11
bassins versants différents. Il ressort de cette étude que le modèle AR le plus simple donne
des performances aussi bonnes que les 3 autres modèles plus complexes. Goswami et al.
(2005) comparent 8 méthodes de mise à jour des sorties pour des prévisions à pas de temps
journalier sur le bassin de Brosna en Irlande. Ces méthodes incluent modèles autorégressifs,
fonctions de transfert et réseaux de neurones. Les 8 méthodes donnent de bonnes prévisions
pour un délai de prévision de 1 jour. Pour des délais compris entre 2 et 6 jours, seules 3
méthodes (un réseau de neurones une fonction de transfert linéaire et un modèle autorégressif)
donnent de bonnes prévisions. Madsen et al (2000) utilisent un modèle autorégressif, un
réseau de neurones et une régression symbolique issue de la programmation génétique pour
corriger les débits en sortie du modèle MIKE11/NAM appliqué au bassin d’Orgeval, sous
bassin de la Seine. Les résultats montrent que le modèle autorégressif donne les meilleures
performances pour les horizons de prévision les plus courts (de 1 à 4 h) alors que la régression
issue de la programmation génétique donne de meilleurs résultats pour les horizons de
prévision les plus longs (de 4 à 9 h). Au regard de ces comparaisons, il semble qu’il n’y ait
pas de méthode de correction des sorties meilleure qu’une autre. L’efficacité de ces méthodes
dépend probablement de l’horizon de prévision, du modèle hydrologique utilisé et du bassin
versant étudié.
Les méthodes de correction des sorties sont aussi couplées à des méthodes corrigeant
d’autres composantes du modèle hydrologique. Kahl et Nachtnebel (2008) utilisent en plus
d’une méthode de correction des entrées, un modèle autorégressif de correction des erreurs.
CHAPITRE 2 : ASSIMILATION DE DONNEES EN HYDROLOGIE
- 62 -
Blöschl et al (2008) utilisent un modèle autorégressif de correction des sorties en complément
de la correction des états d’humidité effectués avec le filtre de Kalman d’ensemble.
La correction des sorties est aussi utilisée en hydraulique. Ricci et al. (2011) utilisent
les hauteurs d’eau mesurées pour corriger celles qui sont modélisées en aval de la rivière.
4. Conclusion
En hydrologie, l’assimilation de données permet de combiner l’information fournie
par les mesures effectuées sur un bassin versant à l’information fournie par les modèles
hydrologiques pour proposer une meilleure estimation des débits. Les données assimilées sont
le plus souvent les débits mesurés à l’exutoire du bassin versant quelle que soit la composante
du modèle qui est corrigée. Les corrections les plus répandues concernent les états du système
et les sorties (les débits). Les corrections des sorties reposent généralement sur la prévision
des erreurs et utilisent des modèles autorégressifs ou des réseaux de neurones. De nombreuses
techniques ont été développées pour la correction des états dont certaines permettent
d’assimiler des données d’humidité des sols. Concernant la correction des variables d’entrée
et des paramètres, les techniques utilisées sont peu nombreuses, spécifiques (autrement
dédiées uniquement à la correction d’une composante du modèle hydrologique) et font
souvent entièrement confiance aux observations assimilées.
La méthode utilisée au cours de cette thèse sera BLUE. Elle sera utilisée dans un cas
où la relation entre la variable de contrôle (variable à corriger) et l’observation assimilée est
faiblement non linéaire. Pour pallier à cette faible non linéarité (illustrée au chapitre 6 en
section 1.2 figure 69), le BLUE sera muni d’une boucle externe. Comparée à de nombreuses
techniques d’assimilation utilisées en hydrologie, cette méthode présente l’avantage de
prendre en compte des erreurs d’observation. Elle est aussi évolutive. Autrement dit, elle peut
être aménagée pour assimiler plusieurs types de données et/ou pour corriger différentes
composantes d’un modèle hydrologique. Cette méthode relativement simple peut aussi
évoluer vers un filtre de Kalman.
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 63 -
CHAPITRE 3 : L’HYDROSYSTEME KARSTIQUE DU LEZ
Les travaux de modélisation et d’assimilation de données mis en œuvre au cours de
cette thèse ont été appliqués à un hydrosystème karstique méditerranéen : celui du Lez. Ce
chapitre donc une description de cet hydrosystème. Il resitue d’abord l’hydrosystème du Lez
dans son contexte méditerranéen et présente les enjeux sociaux et scientifiques associés à ce
bassin (section 1). Les bassins hydrogéologique (section 2) et topographique (section 3) qui
composent cet hydrosystème sont ensuite décrits. Enfin, la section 4 propose un état de l’art
des modélisations réalisées sur cet hydrosystème et des manières de prendre en compte le
karst lorsqu’on modélise une crue de surface.
1. L’hydrosystème du Lez dans le contexte karstique méditerranéen
1.1. Enjeux
Depuis des siècles, le Lez suscite l’intérêt des Montpelliérains. Cette rivière est à la
fois perçue comme un atout et un danger. Une description plus détaillée de la relation entre la
ville de Montpellier et le fleuve Lez est donnée dans la thèse de Romain (2010). Le Lez peut
en effet jouer un rôle bénéfique. Du Xème
au XVIIIème
siècle, le Lez a eu une fonction
commerciale. Le port de Lattes, situé en aval du Lez, facilitait les échanges commerciaux
avec la Méditerranée permettant le développement économique de Montpellier : épices et
drogues venant du Proche Orient ou laine, peau et cire d’Afrique du Nord. A partir du XIIIème
siècle, le Lez a aussi été exploité pour la production et le commerce des draps. Jusqu’au
XIXème siècle, il a fait fonctionner de nombreux moulins utilisés pour la préparation des
toiles de chanvre [Romain, 2010]. Sa fonction est alors artisanale et commerciale. Sa source
est également exploitée depuis la deuxième moitié du XIXème
siècle pour alimenter la ville de
Montpellier en eau potable. Le Lez est donc utile au développement de la ville de
Montpellier. Depuis quelques décennies le Lez a également pris une importance esthétique
comme le montre l’aménagement de ses rives avec le sentier du « Lez vert ». Il est aussi
intégré dans le paysage urbain de Montpellier comme en témoigne la construction de
nouveaux quartiers près de ses berges : Antigone à la fin des années 1970 (et notamment
l’hôtel de Région face au Lez), le Millénaire depuis 1985, la Pompignane avant 1993 et Port
Marianne après 1993 [Romain, 2010]. Malgré ces atouts, le Lez a toujours été une menace
pour les habitants. C’est peut-être la raison pour laquelle la ville de Montpellier s’est
construite sur une butte [Bousquet, 1997] à bonne distance du Lez. Ses crues brusques
appelées les « Lézades » (par analogie avec les « vidourlades » crues violentes du Vidourle,
fleuve situé à l’Est du Lez) sont caractéristiques du milieu méditerranéen. Les événements
antérieurs ont déjà détruit des moulins, des habitations et ont parfois fait des victimes.
Le Lez a donc suscité et suscite toujours un intérêt économique important tant pour les
ressources en eau de sa source karstique que pour ses crues dévastatrices. Il est ainsi étudié
depuis longtemps par de nombreux chercheurs (géologues, hydrogéologues, hydrochimistes
ou hydrologues). Bien instrumenté, il constitue un site d’étude privilégié pour les crues
méditerranéennes.
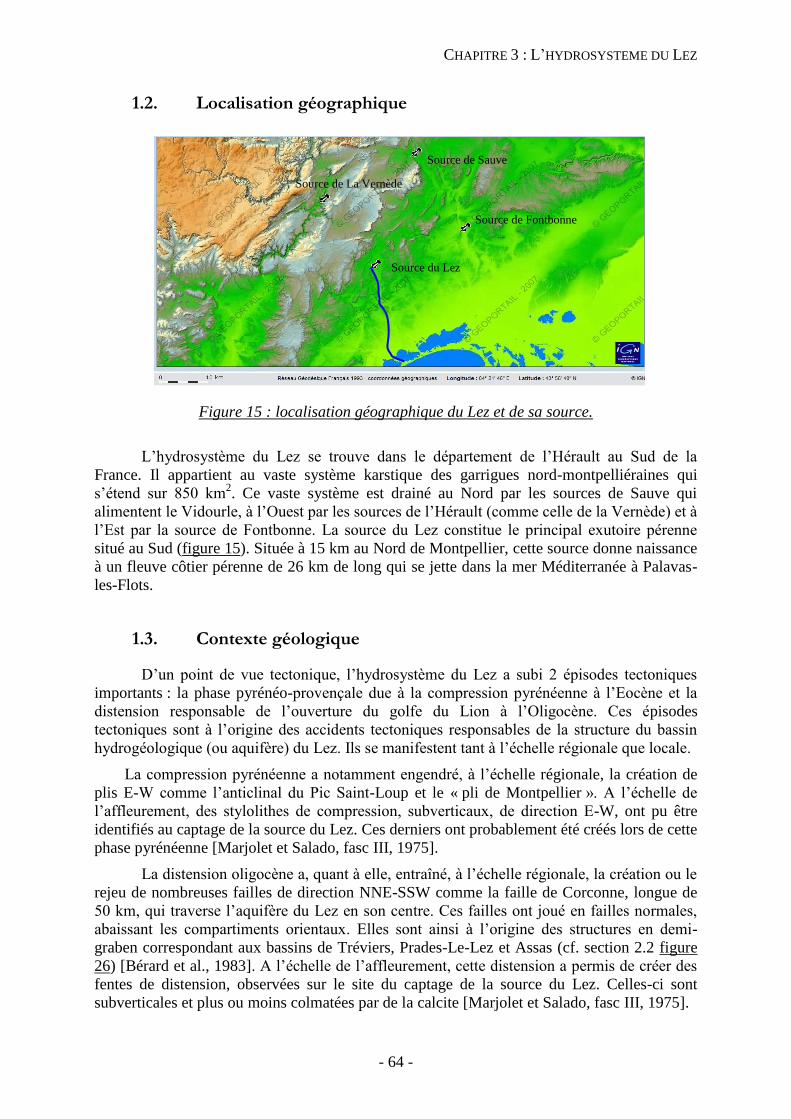
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 64 -
1.2. Localisation géographique
Figure 15 : localisation géographique du Lez et de sa source.
L’hydrosystème du Lez se trouve dans le département de l’Hérault au Sud de la
France. Il appartient au vaste système karstique des garrigues nord-montpelliéraines qui
s’étend sur 850 km2. Ce vaste système est drainé au Nord par les sources de Sauve qui
alimentent le Vidourle, à l’Ouest par les sources de l’Hérault (comme celle de la Vernède) et à
l’Est par la source de Fontbonne. La source du Lez constitue le principal exutoire pérenne
situé au Sud (figure 15). Située à 15 km au Nord de Montpellier, cette source donne naissance
à un fleuve côtier pérenne de 26 km de long qui se jette dans la mer Méditerranée à Palavas-
les-Flots.
1.3. Contexte géologique
D’un point de vue tectonique, l’hydrosystème du Lez a subi 2 épisodes tectoniques
importants : la phase pyrénéo-provençale due à la compression pyrénéenne à l’Eocène et la
distension responsable de l’ouverture du golfe du Lion à l’Oligocène. Ces épisodes
tectoniques sont à l’origine des accidents tectoniques responsables de la structure du bassin
hydrogéologique (ou aquifère) du Lez. Ils se manifestent tant à l’échelle régionale que locale.
La compression pyrénéenne a notamment engendré, à l’échelle régionale, la création de
plis E-W comme l’anticlinal du Pic Saint-Loup et le « pli de Montpellier ». A l’échelle de
l’affleurement, des stylolithes de compression, subverticaux, de direction E-W, ont pu être
identifiés au captage de la source du Lez. Ces derniers ont probablement été créés lors de cette
phase pyrénéenne [Marjolet et Salado, fasc III, 1975].
La distension oligocène a, quant à elle, entraîné, à l’échelle régionale, la création ou le
rejeu de nombreuses failles de direction NNE-SSW comme la faille de Corconne, longue de
50 km, qui traverse l’aquifère du Lez en son centre. Ces failles ont joué en failles normales,
abaissant les compartiments orientaux. Elles sont ainsi à l’origine des structures en demi-
graben correspondant aux bassins de Tréviers, Prades-Le-Lez et Assas (cf. section 2.2 figure
26) [Bérard et al., 1983]. A l’échelle de l’affleurement, cette distension a permis de créer des
fentes de distension, observées sur le site du captage de la source du Lez. Celles-ci sont
subverticales et plus ou moins colmatées par de la calcite [Marjolet et Salado, fasc III, 1975].
Source du Lez
Source de Fontbonne
Source de Sauve
Source de La Vernède
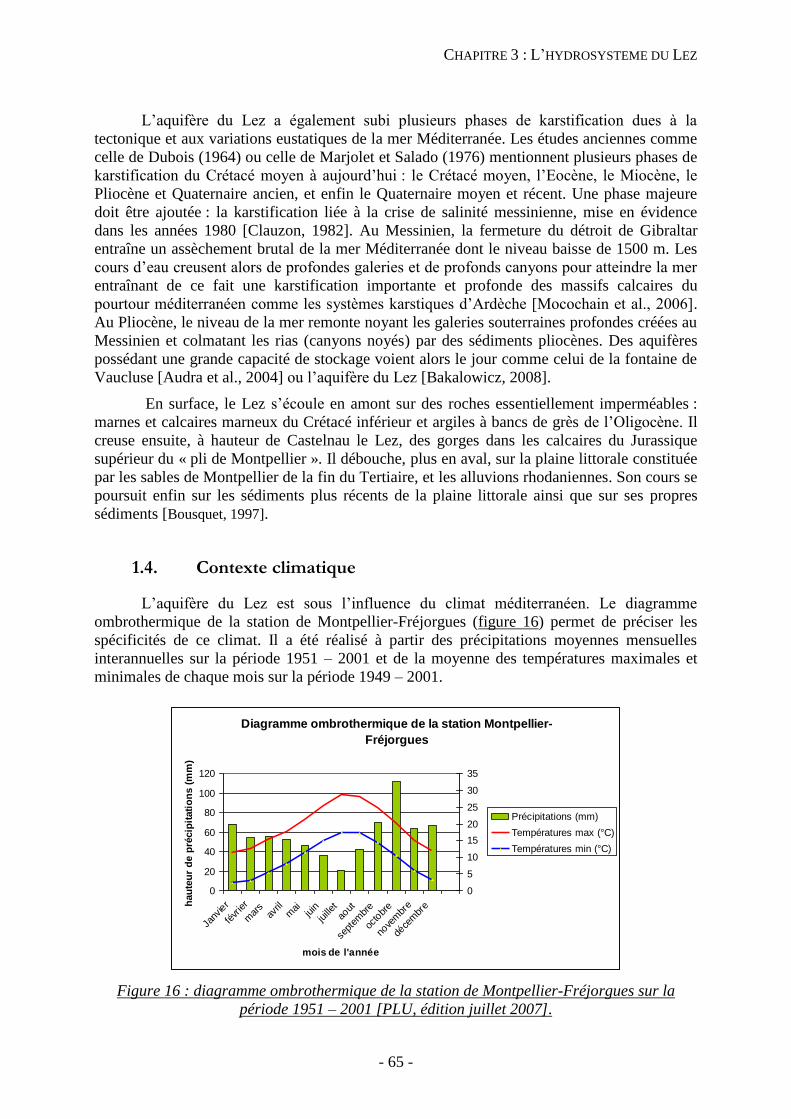
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 65 -
L’aquifère du Lez a également subi plusieurs phases de karstification dues à la
tectonique et aux variations eustatiques de la mer Méditerranée. Les études anciennes comme
celle de Dubois (1964) ou celle de Marjolet et Salado (1976) mentionnent plusieurs phases de
karstification du Crétacé moyen à aujourd’hui : le Crétacé moyen, l’Eocène, le Miocène, le
Pliocène et Quaternaire ancien, et enfin le Quaternaire moyen et récent. Une phase majeure
doit être ajoutée : la karstification liée à la crise de salinité messinienne, mise en évidence
dans les années 1980 [Clauzon, 1982]. Au Messinien, la fermeture du détroit de Gibraltar
entraîne un assèchement brutal de la mer Méditerranée dont le niveau baisse de 1500 m. Les
cours d’eau creusent alors de profondes galeries et de profonds canyons pour atteindre la mer
entraînant de ce fait une karstification importante et profonde des massifs calcaires du
pourtour méditerranéen comme les systèmes karstiques d’Ardèche [Mocochain et al., 2006].
Au Pliocène, le niveau de la mer remonte noyant les galeries souterraines profondes créées au
Messinien et colmatant les rias (canyons noyés) par des sédiments pliocènes. Des aquifères
possédant une grande capacité de stockage voient alors le jour comme celui de la fontaine de
Vaucluse [Audra et al., 2004] ou l’aquifère du Lez [Bakalowicz, 2008].
En surface, le Lez s’écoule en amont sur des roches essentiellement imperméables :
marnes et calcaires marneux du Crétacé inférieur et argiles à bancs de grès de l’Oligocène. Il
creuse ensuite, à hauteur de Castelnau le Lez, des gorges dans les calcaires du Jurassique
supérieur du « pli de Montpellier ». Il débouche, plus en aval, sur la plaine littorale constituée
par les sables de Montpellier de la fin du Tertiaire, et les alluvions rhodaniennes. Son cours se
poursuit enfin sur les sédiments plus récents de la plaine littorale ainsi que sur ses propres
sédiments [Bousquet, 1997].
1.4. Contexte climatique
L’aquifère du Lez est sous l’influence du climat méditerranéen. Le diagramme
ombrothermique de la station de Montpellier-Fréjorgues (figure 16) permet de préciser les
spécificités de ce climat. Il a été réalisé à partir des précipitations moyennes mensuelles
interannuelles sur la période 1951 – 2001 et de la moyenne des températures maximales et
minimales de chaque mois sur la période 1949 – 2001.
Figure 16 : diagramme ombrothermique de la station de Montpellier-Fréjorgues sur la
période 1951 – 2001 [PLU, édition juillet 2007].
Diagramme ombrothermique de la station Montpellier-
Fréjorgues
0
20
40
60
80
100
120
Janv
ier
févr
ier
mar
sav
ril
mai
juin
juillet
aout
sept
embr
e
octo
bre
nove
mbr
e
déce
mbr
e
mois de l'année
hau
teu
r d
e p
récip
itati
on
s (
mm
)
0
5
10
15
20
25
30
35
Précipitations (mm)
Températures max (°C)
Températures min (°C)
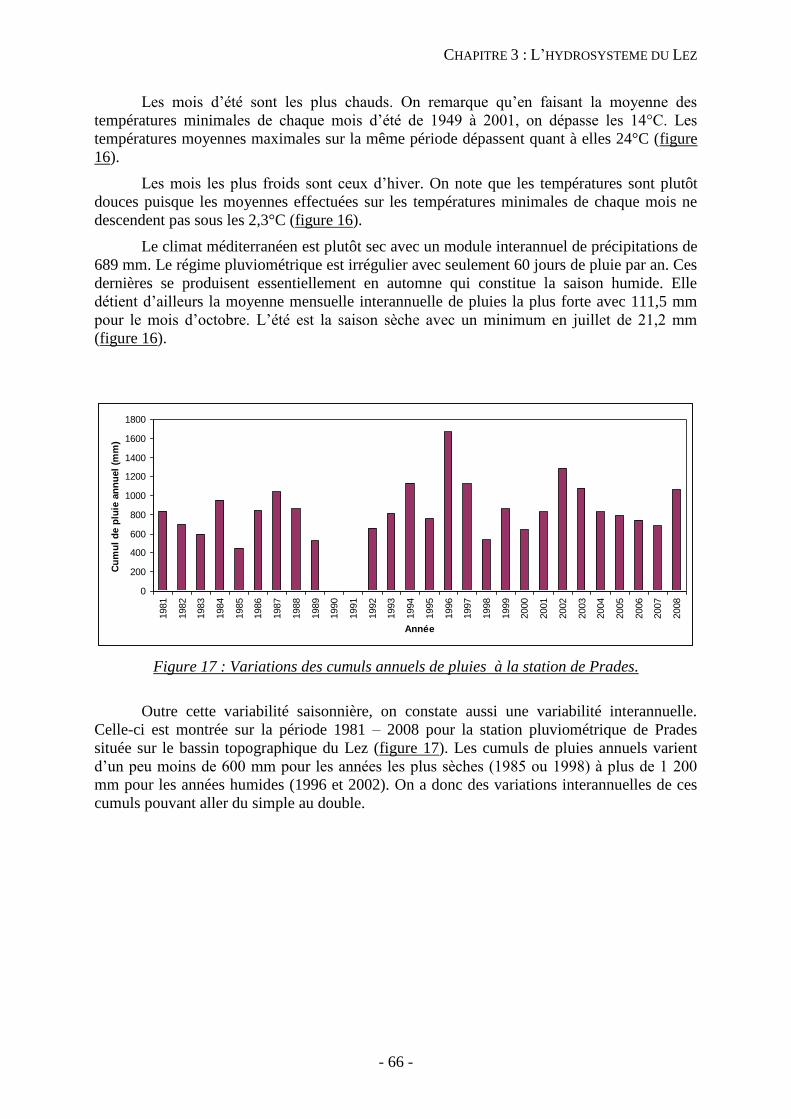
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 66 -
Les mois d’été sont les plus chauds. On remarque qu’en faisant la moyenne des
températures minimales de chaque mois d’été de 1949 à 2001, on dépasse les 14°C. Les
températures moyennes maximales sur la même période dépassent quant à elles 24°C (figure
16).
Les mois les plus froids sont ceux d’hiver. On note que les températures sont plutôt
douces puisque les moyennes effectuées sur les températures minimales de chaque mois ne
descendent pas sous les 2,3°C (figure 16).
Le climat méditerranéen est plutôt sec avec un module interannuel de précipitations de
689 mm. Le régime pluviométrique est irrégulier avec seulement 60 jours de pluie par an. Ces
dernières se produisent essentiellement en automne qui constitue la saison humide. Elle
détient d’ailleurs la moyenne mensuelle interannuelle de pluies la plus forte avec 111,5 mm
pour le mois d’octobre. L’été est la saison sèche avec un minimum en juillet de 21,2 mm
(figure 16).
Figure 17 : Variations des cumuls annuels de pluies à la station de Prades.
Outre cette variabilité saisonnière, on constate aussi une variabilité interannuelle.
Celle-ci est montrée sur la période 1981 – 2008 pour la station pluviométrique de Prades
située sur le bassin topographique du Lez (figure 17). Les cumuls de pluies annuels varient
d’un peu moins de 600 mm pour les années les plus sèches (1985 ou 1998) à plus de 1 200
mm pour les années humides (1996 et 2002). On a donc des variations interannuelles de ces
cumuls pouvant aller du simple au double.
0
200
400
600
800
1000
1200
1400
1600
1800
1981
1982
1983
1984
1985
1986
1987
1988
1989
1990
1991
1992
1993
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
2006
2007
2008
Année
Cu
mu
l d
e p
luie
an
nu
el
(mm
)
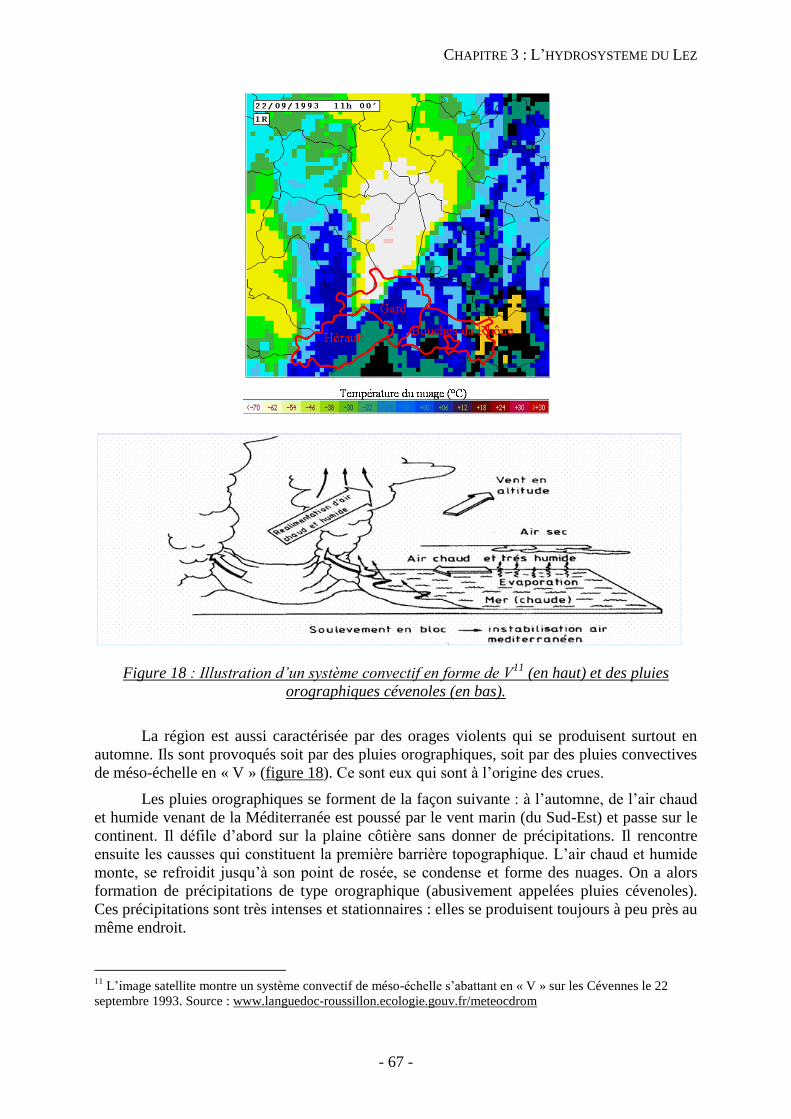
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 67 -
Figure 18 : Illustration d’un système convectif en forme de V11
(en haut) et des pluies
orographiques cévenoles (en bas).
La région est aussi caractérisée par des orages violents qui se produisent surtout en
automne. Ils sont provoqués soit par des pluies orographiques, soit par des pluies convectives
de méso-échelle en « V » (figure 18). Ce sont eux qui sont à l’origine des crues.
Les pluies orographiques se forment de la façon suivante : à l’automne, de l’air chaud
et humide venant de la Méditerranée est poussé par le vent marin (du Sud-Est) et passe sur le
continent. Il défile d’abord sur la plaine côtière sans donner de précipitations. Il rencontre
ensuite les causses qui constituent la première barrière topographique. L’air chaud et humide
monte, se refroidit jusqu’à son point de rosée, se condense et forme des nuages. On a alors
formation de précipitations de type orographique (abusivement appelées pluies cévenoles).
Ces précipitations sont très intenses et stationnaires : elles se produisent toujours à peu près au
même endroit.
11
L’image satellite montre un système convectif de méso-échelle s’abattant en « V » sur les Cévennes le 22
septembre 1993. Source : www.languedoc-roussillon.ecologie.gouv.fr/meteocdrom
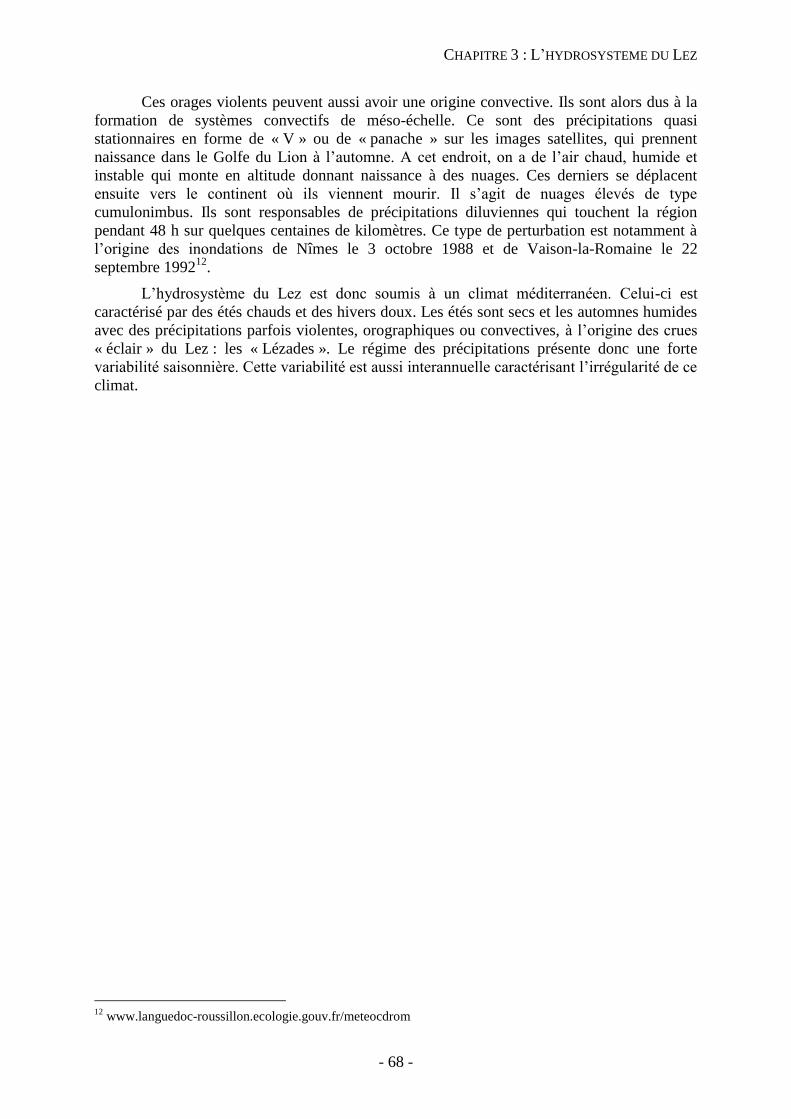
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 68 -
Ces orages violents peuvent aussi avoir une origine convective. Ils sont alors dus à la
formation de systèmes convectifs de méso-échelle. Ce sont des précipitations quasi
stationnaires en forme de « V » ou de « panache » sur les images satellites, qui prennent
naissance dans le Golfe du Lion à l’automne. A cet endroit, on a de l’air chaud, humide et
instable qui monte en altitude donnant naissance à des nuages. Ces derniers se déplacent
ensuite vers le continent où ils viennent mourir. Il s’agit de nuages élevés de type
cumulonimbus. Ils sont responsables de précipitations diluviennes qui touchent la région
pendant 48 h sur quelques centaines de kilomètres. Ce type de perturbation est notamment à
l’origine des inondations de Nîmes le 3 octobre 1988 et de Vaison-la-Romaine le 22
septembre 199212
.
L’hydrosystème du Lez est donc soumis à un climat méditerranéen. Celui-ci est
caractérisé par des étés chauds et des hivers doux. Les étés sont secs et les automnes humides
avec des précipitations parfois violentes, orographiques ou convectives, à l’origine des crues
« éclair » du Lez : les « Lézades ». Le régime des précipitations présente donc une forte
variabilité saisonnière. Cette variabilité est aussi interannuelle caractérisant l’irrégularité de ce
climat.
12
www.languedoc-roussillon.ecologie.gouv.fr/meteocdrom
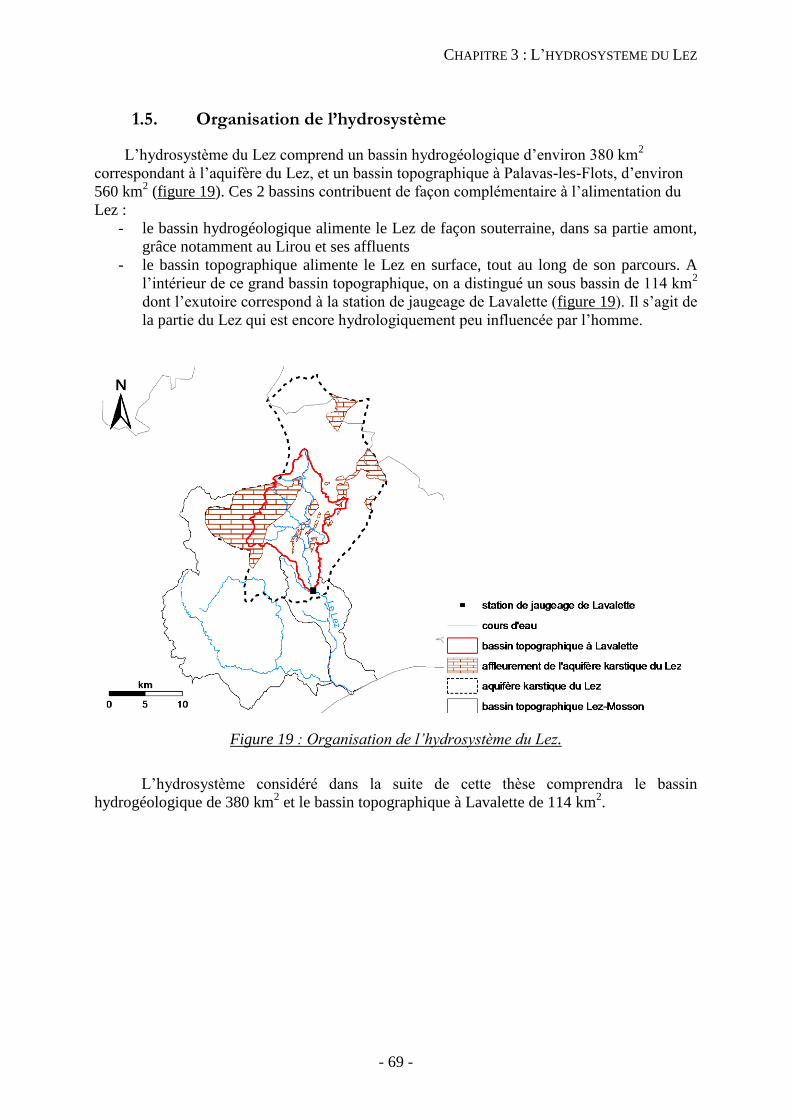
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 69 -
1.5. Organisation de l’hydrosystème
L’hydrosystème du Lez comprend un bassin hydrogéologique d’environ 380 km2
correspondant à l’aquifère du Lez, et un bassin topographique à Palavas-les-Flots, d’environ
560 km2 (figure 19). Ces 2 bassins contribuent de façon complémentaire à l’alimentation du
Lez :
- le bassin hydrogéologique alimente le Lez de façon souterraine, dans sa partie amont,
grâce notamment au Lirou et ses affluents
- le bassin topographique alimente le Lez en surface, tout au long de son parcours. A
l’intérieur de ce grand bassin topographique, on a distingué un sous bassin de 114 km2
dont l’exutoire correspond à la station de jaugeage de Lavalette (figure 19). Il s’agit de
la partie du Lez qui est encore hydrologiquement peu influencée par l’homme.
Figure 19 : Organisation de l’hydrosystème du Lez.
L’hydrosystème considéré dans la suite de cette thèse comprendra le bassin
hydrogéologique de 380 km2 et le bassin topographique à Lavalette de 114 km
2.
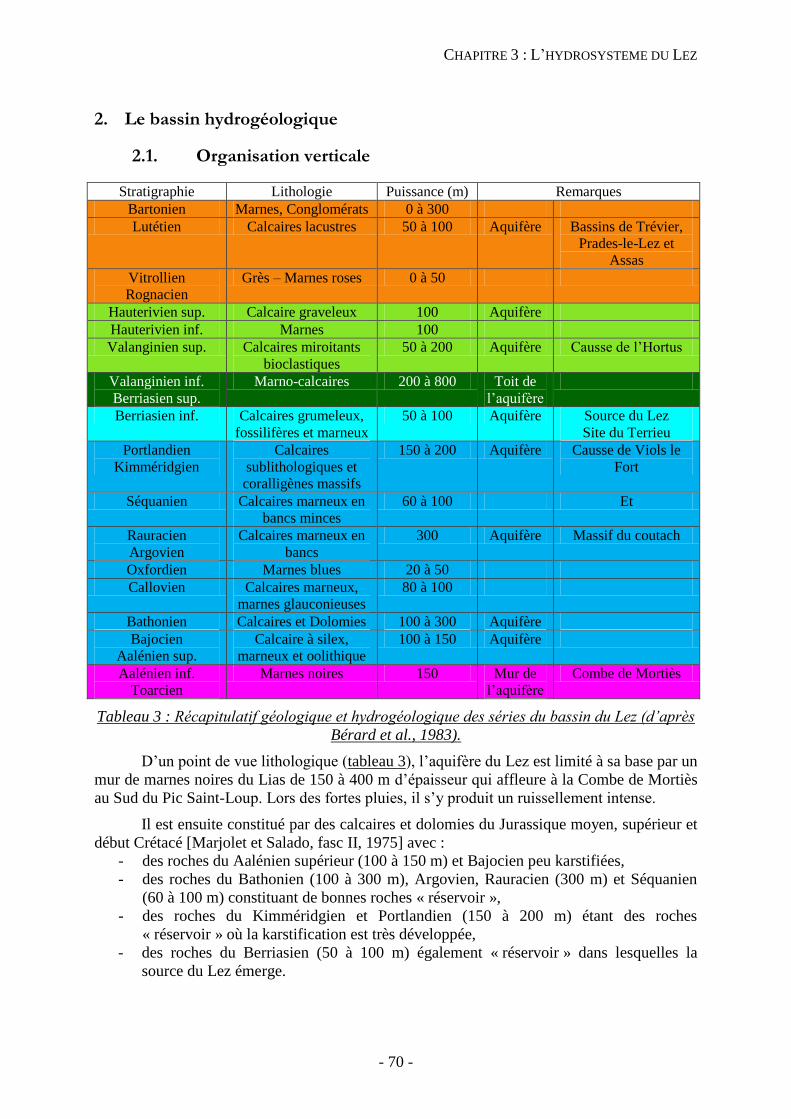
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 70 -
2. Le bassin hydrogéologique
2.1. Organisation verticale
Stratigraphie Lithologie Puissance (m) Remarques
Bartonien Marnes, Conglomérats 0 à 300
Lutétien Calcaires lacustres 50 à 100 Aquifère Bassins de Trévier,
Prades-le-Lez et
Assas
Vitrollien
Rognacien
Grès – Marnes roses 0 à 50
Hauterivien sup. Calcaire graveleux 100 Aquifère
Hauterivien inf. Marnes 100
Valanginien sup. Calcaires miroitants
bioclastiques
50 à 200 Aquifère Causse de l’Hortus
Valanginien inf.
Berriasien sup.
Marno-calcaires 200 à 800 Toit de
l’aquifère
Berriasien inf. Calcaires grumeleux,
fossilifères et marneux
50 à 100 Aquifère Source du Lez
Site du Terrieu
Portlandien
Kimméridgien
Calcaires
sublithologiques et
coralligènes massifs
150 à 200 Aquifère Causse de Viols le
Fort
Séquanien Calcaires marneux en
bancs minces
60 à 100 Et
Rauracien
Argovien
Calcaires marneux en
bancs
300 Aquifère Massif du coutach
Oxfordien Marnes blues 20 à 50
Callovien Calcaires marneux,
marnes glauconieuses
80 à 100
Bathonien Calcaires et Dolomies 100 à 300 Aquifère
Bajocien
Aalénien sup.
Calcaire à silex,
marneux et oolithique
100 à 150 Aquifère
Aalénien inf.
Toarcien
Marnes noires 150 Mur de
l’aquifère
Combe de Mortiès
Tableau 3 : Récapitulatif géologique et hydrogéologique des séries du bassin du Lez (d’après
Bérard et al., 1983).
D’un point de vue lithologique (tableau 3), l’aquifère du Lez est limité à sa base par un
mur de marnes noires du Lias de 150 à 400 m d’épaisseur qui affleure à la Combe de Mortiès
au Sud du Pic Saint-Loup. Lors des fortes pluies, il s’y produit un ruissellement intense.
Il est ensuite constitué par des calcaires et dolomies du Jurassique moyen, supérieur et
début Crétacé [Marjolet et Salado, fasc II, 1975] avec :
- des roches du Aalénien supérieur (100 à 150 m) et Bajocien peu karstifiées,
- des roches du Bathonien (100 à 300 m), Argovien, Rauracien (300 m) et Séquanien
(60 à 100 m) constituant de bonnes roches « réservoir »,
- des roches du Kimméridgien et Portlandien (150 à 200 m) étant des roches
« réservoir » où la karstification est très développée,
- des roches du Berriasien (50 à 100 m) également « réservoir » dans lesquelles la
source du Lez émerge.
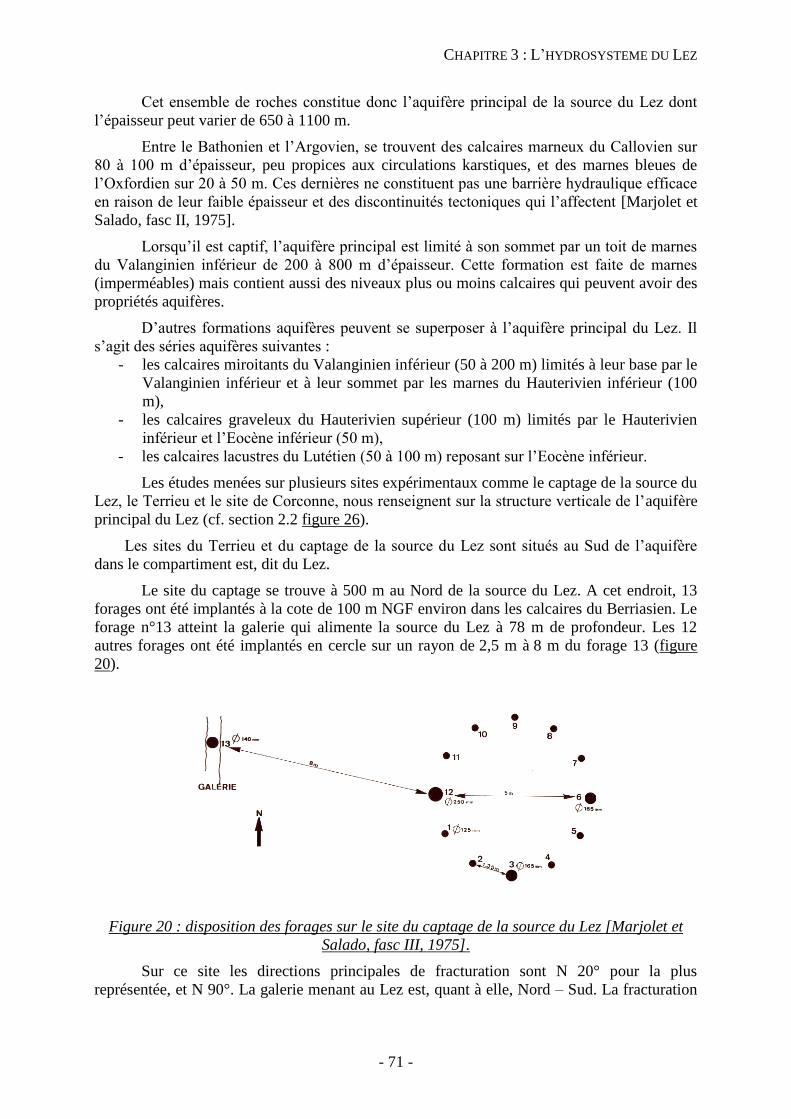
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 71 -
Cet ensemble de roches constitue donc l’aquifère principal de la source du Lez dont
l’épaisseur peut varier de 650 à 1100 m.
Entre le Bathonien et l’Argovien, se trouvent des calcaires marneux du Callovien sur
80 à 100 m d’épaisseur, peu propices aux circulations karstiques, et des marnes bleues de
l’Oxfordien sur 20 à 50 m. Ces dernières ne constituent pas une barrière hydraulique efficace
en raison de leur faible épaisseur et des discontinuités tectoniques qui l’affectent [Marjolet et
Salado, fasc II, 1975].
Lorsqu’il est captif, l’aquifère principal est limité à son sommet par un toit de marnes
du Valanginien inférieur de 200 à 800 m d’épaisseur. Cette formation est faite de marnes
(imperméables) mais contient aussi des niveaux plus ou moins calcaires qui peuvent avoir des
propriétés aquifères.
D’autres formations aquifères peuvent se superposer à l’aquifère principal du Lez. Il
s’agit des séries aquifères suivantes :
- les calcaires miroitants du Valanginien inférieur (50 à 200 m) limités à leur base par le
Valanginien inférieur et à leur sommet par les marnes du Hauterivien inférieur (100
m),
- les calcaires graveleux du Hauterivien supérieur (100 m) limités par le Hauterivien
inférieur et l’Eocène inférieur (50 m),
- les calcaires lacustres du Lutétien (50 à 100 m) reposant sur l’Eocène inférieur.
Les études menées sur plusieurs sites expérimentaux comme le captage de la source du
Lez, le Terrieu et le site de Corconne, nous renseignent sur la structure verticale de l’aquifère
principal du Lez (cf. section 2.2 figure 26).
Les sites du Terrieu et du captage de la source du Lez sont situés au Sud de l’aquifère
dans le compartiment est, dit du Lez.
Le site du captage se trouve à 500 m au Nord de la source du Lez. A cet endroit, 13
forages ont été implantés à la cote de 100 m NGF environ dans les calcaires du Berriasien. Le
forage n°13 atteint la galerie qui alimente la source du Lez à 78 m de profondeur. Les 12
autres forages ont été implantés en cercle sur un rayon de 2,5 m à 8 m du forage 13 (figure
20).
Figure 20 : disposition des forages sur le site du captage de la source du Lez [Marjolet et
Salado, fasc III, 1975].
Sur ce site les directions principales de fracturation sont N 20° pour la plus
représentée, et N 90°. La galerie menant au Lez est, quant à elle, Nord – Sud. La fracturation
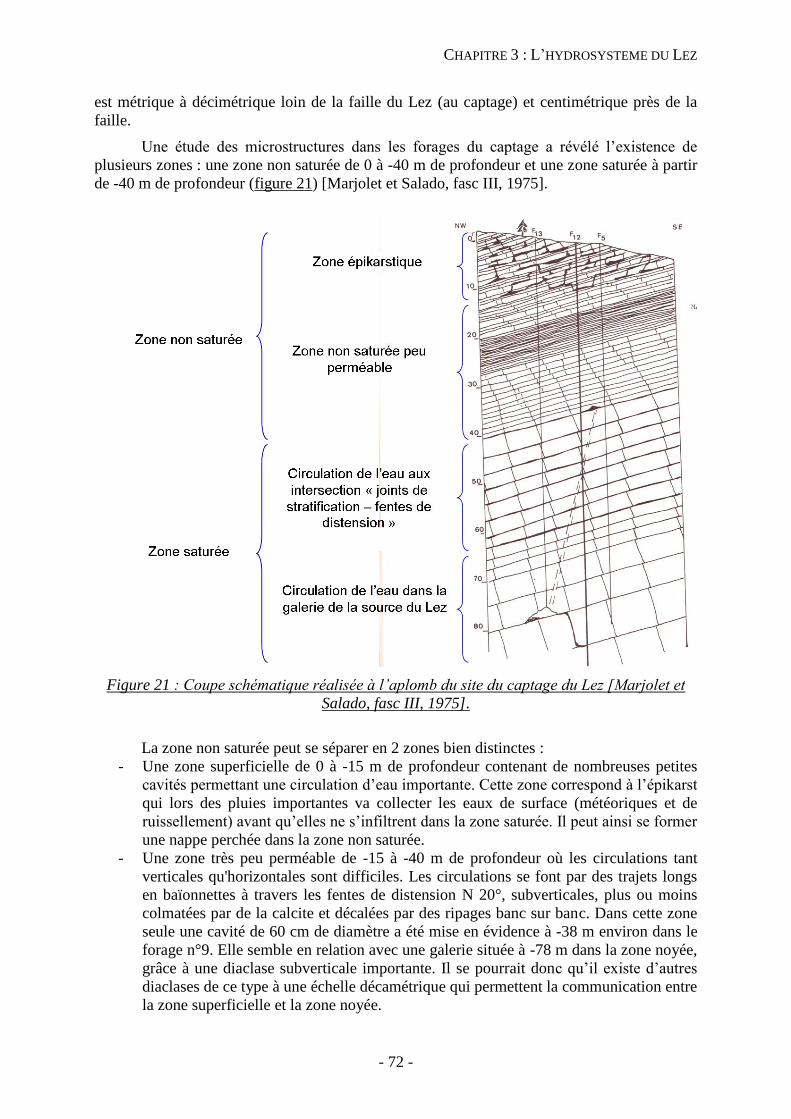
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 72 -
est métrique à décimétrique loin de la faille du Lez (au captage) et centimétrique près de la
faille.
Une étude des microstructures dans les forages du captage a révélé l’existence de
plusieurs zones : une zone non saturée de 0 à -40 m de profondeur et une zone saturée à partir
de -40 m de profondeur (figure 21) [Marjolet et Salado, fasc III, 1975].
Figure 21 : Coupe schématique réalisée à l’aplomb du site du captage du Lez [Marjolet et
Salado, fasc III, 1975].
La zone non saturée peut se séparer en 2 zones bien distinctes :
- Une zone superficielle de 0 à -15 m de profondeur contenant de nombreuses petites
cavités permettant une circulation d’eau importante. Cette zone correspond à l’épikarst
qui lors des pluies importantes va collecter les eaux de surface (météoriques et de
ruissellement) avant qu’elles ne s’infiltrent dans la zone saturée. Il peut ainsi se former
une nappe perchée dans la zone non saturée.
- Une zone très peu perméable de -15 à -40 m de profondeur où les circulations tant
verticales qu'horizontales sont difficiles. Les circulations se font par des trajets longs
en baïonnettes à travers les fentes de distension N 20°, subverticales, plus ou moins
colmatées par de la calcite et décalées par des ripages banc sur banc. Dans cette zone
seule une cavité de 60 cm de diamètre a été mise en évidence à -38 m environ dans le
forage n°9. Elle semble en relation avec une galerie située à -78 m dans la zone noyée,
grâce à une diaclase subverticale importante. Il se pourrait donc qu’il existe d’autres
diaclases de ce type à une échelle décamétrique qui permettent la communication entre
la zone superficielle et la zone noyée.

CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 73 -
Dans la zone saturée, on a aussi 2 zones distinctes :
- Une zone entre - 40 et - 65 m de profondeur contenant des fentes de distension N 20°,
subverticales, plus ou moins colmatées par de la calcite (datant de l’Oligocène) et des
stylolithes de compression N 90°, subverticaux (probablement dus à la compression
pyrénéenne). Ces structures sont néanmoins peu propices à la circulation d’eau. En
revanche, des ripages banc sur banc ont pu être observés à hauteur des joints de
stratification. Ceux-ci ont permis la création d’ouvertures d’autant plus grandes que
les bancs calcaires sont compétents. La circulation d’eau se ferait donc dans les plans
contenant les joints de stratification. Ceci est d’autant plus probable qu’une
karstification préférentielle suivant les joints de stratification a été identifiée dans une
petite carrière au Sud de la source de Restinclières. Dans ces plans-là, on aurait une
direction d’écoulement privilégiée N 20° qui correspondrait aux intersections « joint
de stratification – fentes de distension ».
- Une zone à partir de -63 m dans les calcaires plus durs du Jurassique supérieur où la
circulation se fait essentiellement dans la galerie située à -78 m.
Le site du Terrieu est à 4,6 km au Nord de la source du Lez. A cet endroit, 20 forages
ont été faits dans les calcaires du Berriasien sur 500 m2, atteignant tous la zone saturée. Des
relevés de fracturation effectués sur le site montrent une direction préférentielle N 20°
semblable à celle du Lez qui ressort à la fois sur les analyses par photographie aérienne et à
l’affleurement. Une autre direction N 110°, moins importante, ressort uniquement sur les
analyses à l’affleurement (figure 22).
Figure 22 : rosaces de fracturation (en nombre de fractures) pour le site du Terrieu effectuée
à partir de photographies aériennes (à gauche) et sur station microtectonique à droite
[Drogue et Grillot, 1976].
Des pompages d’essais réalisés sur le site, ont mis en évidence 2 directions
d’écoulement préférentiel quasi-perpendiculaires, proches des directions de fracturation
préférentielle (figure 23) [Drogue et Grillot, 1976]. De plus, on retrouve comme au site du
captage du Lez, les mêmes microstructures (fentes de distension et stylolithes de
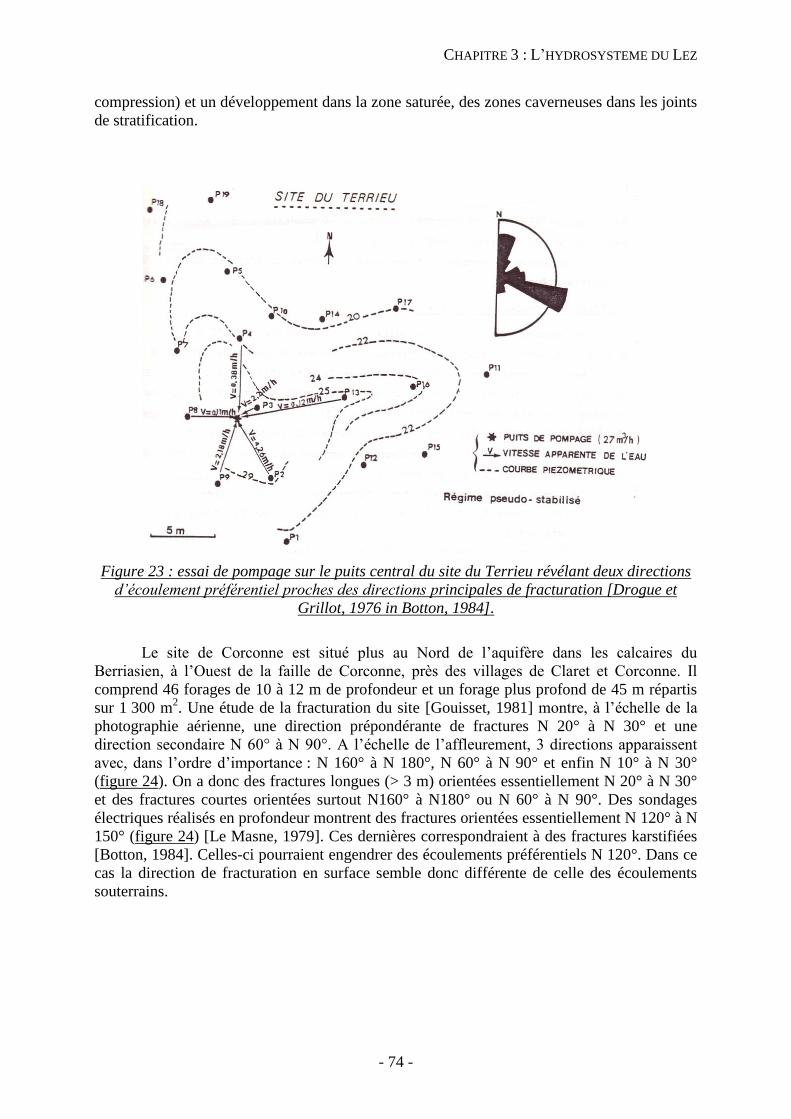
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 74 -
compression) et un développement dans la zone saturée, des zones caverneuses dans les joints
de stratification.
Figure 23 : essai de pompage sur le puits central du site du Terrieu révélant deux directions
d’écoulement préférentiel proches des directions principales de fracturation [Drogue et
Grillot, 1976 in Botton, 1984].
Le site de Corconne est situé plus au Nord de l’aquifère dans les calcaires du
Berriasien, à l’Ouest de la faille de Corconne, près des villages de Claret et Corconne. Il
comprend 46 forages de 10 à 12 m de profondeur et un forage plus profond de 45 m répartis
sur 1 300 m2. Une étude de la fracturation du site [Gouisset, 1981] montre, à l’échelle de la
photographie aérienne, une direction prépondérante de fractures N 20° à N 30° et une
direction secondaire N 60° à N 90°. A l’échelle de l’affleurement, 3 directions apparaissent
avec, dans l’ordre d’importance : N 160° à N 180°, N 60° à N 90° et enfin N 10° à N 30°
(figure 24). On a donc des fractures longues (> 3 m) orientées essentiellement N 20° à N 30°
et des fractures courtes orientées surtout N160° à N180° ou N 60° à N 90°. Des sondages
électriques réalisés en profondeur montrent des fractures orientées essentiellement N 120° à N
150° (figure 24) [Le Masne, 1979]. Ces dernières correspondraient à des fractures karstifiées
[Botton, 1984]. Celles-ci pourraient engendrer des écoulements préférentiels N 120°. Dans ce
cas la direction de fracturation en surface semble donc différente de celle des écoulements
souterrains.
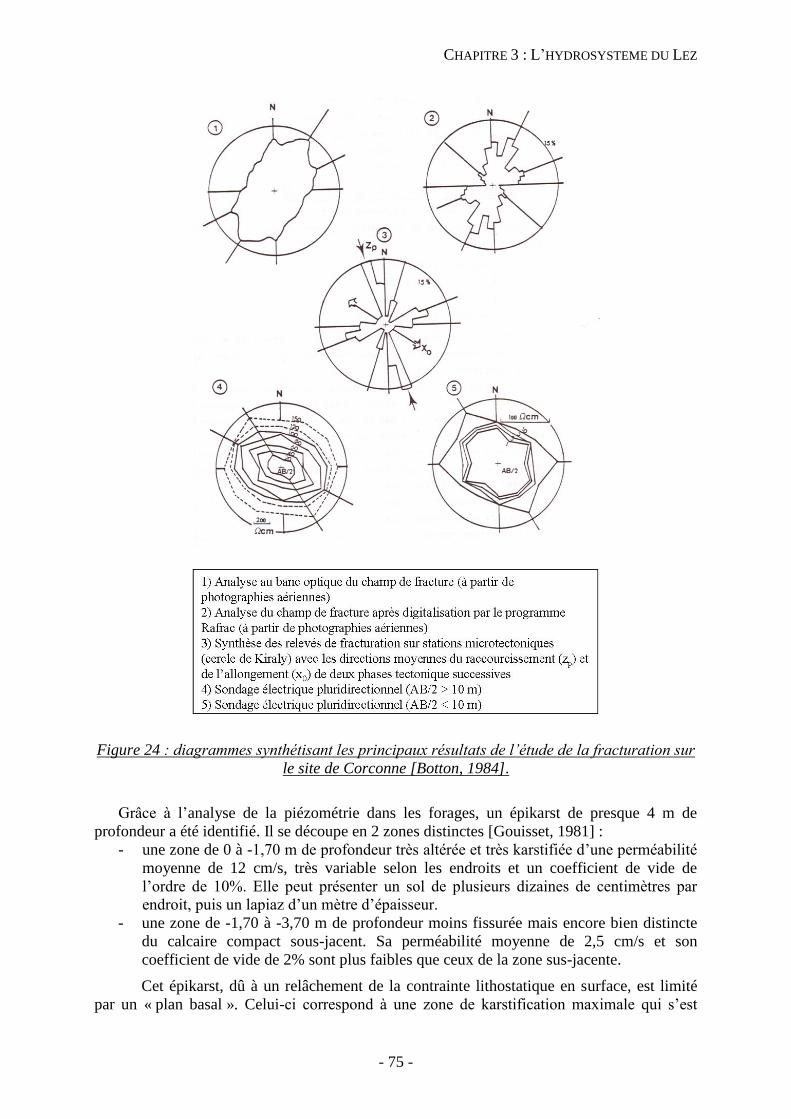
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 75 -
Figure 24 : diagrammes synthétisant les principaux résultats de l’étude de la fracturation sur
le site de Corconne [Botton, 1984].
Grâce à l’analyse de la piézométrie dans les forages, un épikarst de presque 4 m de
profondeur a été identifié. Il se découpe en 2 zones distinctes [Gouisset, 1981] :
- une zone de 0 à -1,70 m de profondeur très altérée et très karstifiée d’une perméabilité
moyenne de 12 cm/s, très variable selon les endroits et un coefficient de vide de
l’ordre de 10%. Elle peut présenter un sol de plusieurs dizaines de centimètres par
endroit, puis un lapiaz d’un mètre d’épaisseur.
- une zone de -1,70 à -3,70 m de profondeur moins fissurée mais encore bien distincte
du calcaire compact sous-jacent. Sa perméabilité moyenne de 2,5 cm/s et son
coefficient de vide de 2% sont plus faibles que ceux de la zone sus-jacente.
Cet épikarst, dû à un relâchement de la contrainte lithostatique en surface, est limité
par un « plan basal ». Celui-ci correspond à une zone de karstification maximale qui s’est
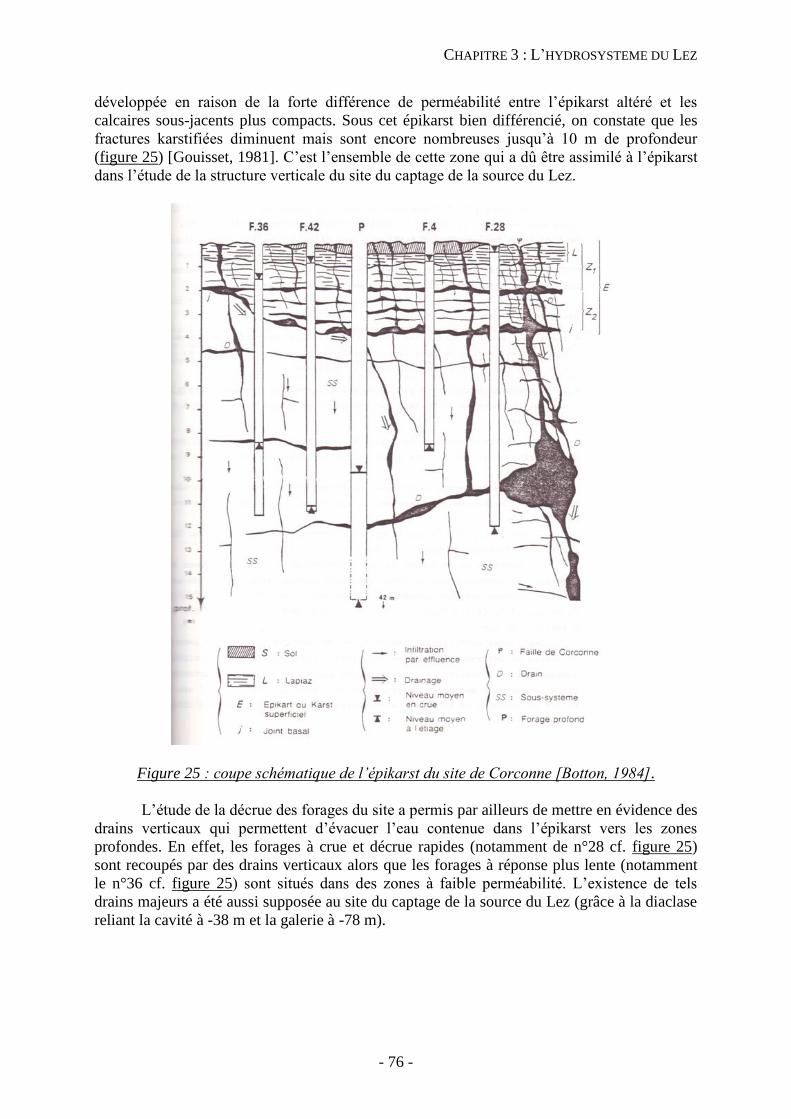
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 76 -
développée en raison de la forte différence de perméabilité entre l’épikarst altéré et les
calcaires sous-jacents plus compacts. Sous cet épikarst bien différencié, on constate que les
fractures karstifiées diminuent mais sont encore nombreuses jusqu’à 10 m de profondeur
(figure 25) [Gouisset, 1981]. C’est l’ensemble de cette zone qui a dû être assimilé à l’épikarst
dans l’étude de la structure verticale du site du captage de la source du Lez.
Figure 25 : coupe schématique de l’épikarst du site de Corconne [Botton, 1984].
L’étude de la décrue des forages du site a permis par ailleurs de mettre en évidence des
drains verticaux qui permettent d’évacuer l’eau contenue dans l’épikarst vers les zones
profondes. En effet, les forages à crue et décrue rapides (notamment de n°28 cf. figure 25)
sont recoupés par des drains verticaux alors que les forages à réponse plus lente (notamment
le n°36 cf. figure 25) sont situés dans des zones à faible perméabilité. L’existence de tels
drains majeurs a été aussi supposée au site du captage de la source du Lez (grâce à la diaclase
reliant la cavité à -38 m et la galerie à -78 m).
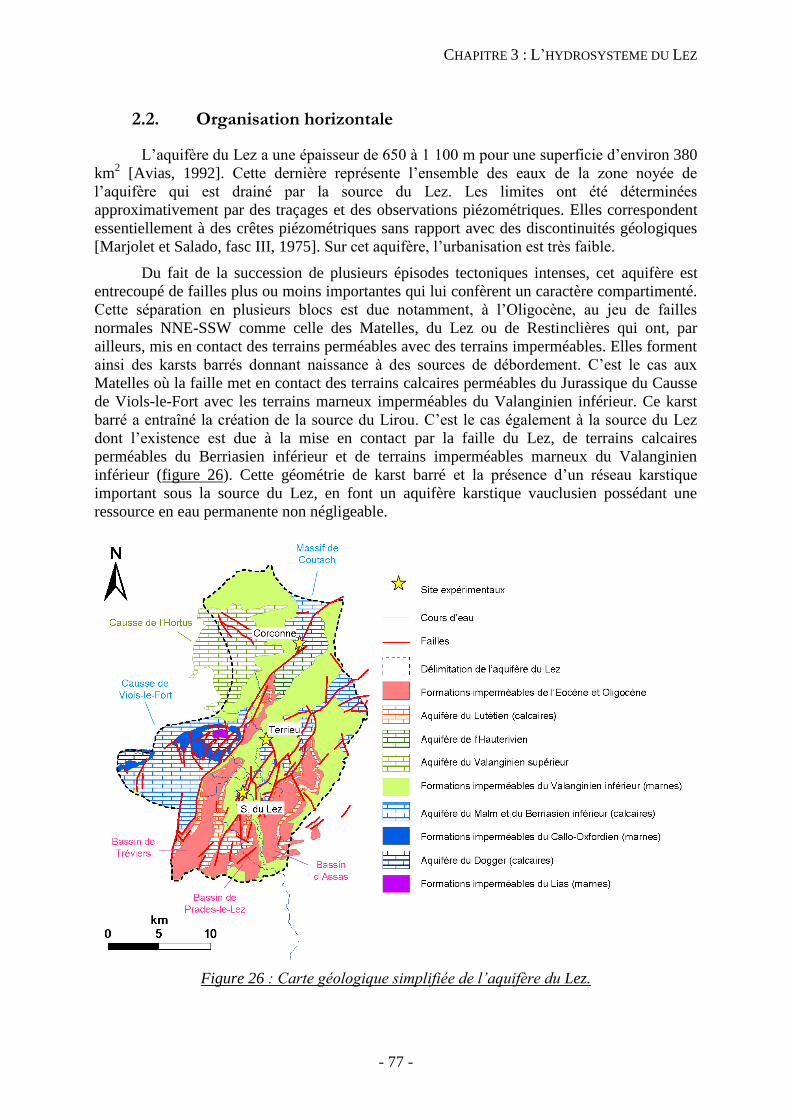
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 77 -
2.2. Organisation horizontale
L’aquifère du Lez a une épaisseur de 650 à 1 100 m pour une superficie d’environ 380
km2 [Avias, 1992]. Cette dernière représente l’ensemble des eaux de la zone noyée de
l’aquifère qui est drainé par la source du Lez. Les limites ont été déterminées
approximativement par des traçages et des observations piézométriques. Elles correspondent
essentiellement à des crêtes piézométriques sans rapport avec des discontinuités géologiques
[Marjolet et Salado, fasc III, 1975]. Sur cet aquifère, l’urbanisation est très faible.
Du fait de la succession de plusieurs épisodes tectoniques intenses, cet aquifère est
entrecoupé de failles plus ou moins importantes qui lui confèrent un caractère compartimenté.
Cette séparation en plusieurs blocs est due notamment, à l’Oligocène, au jeu de failles
normales NNE-SSW comme celle des Matelles, du Lez ou de Restinclières qui ont, par
ailleurs, mis en contact des terrains perméables avec des terrains imperméables. Elles forment
ainsi des karsts barrés donnant naissance à des sources de débordement. C’est le cas aux
Matelles où la faille met en contact des terrains calcaires perméables du Jurassique du Causse
de Viols-le-Fort avec les terrains marneux imperméables du Valanginien inférieur. Ce karst
barré a entraîné la création de la source du Lirou. C’est le cas également à la source du Lez
dont l’existence est due à la mise en contact par la faille du Lez, de terrains calcaires
perméables du Berriasien inférieur et de terrains imperméables marneux du Valanginien
inférieur (figure 26). Cette géométrie de karst barré et la présence d’un réseau karstique
important sous la source du Lez, en font un aquifère karstique vauclusien possédant une
ressource en eau permanente non négligeable.
Figure 26 : Carte géologique simplifiée de l’aquifère du Lez.
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 78 -
L’aquifère du Lez est par ailleurs un aquifère mixte puisqu’il est libre à certains
endroit et captif à d’autres.
Il est libre dans sa partie sud ouest, sur le causse de Viols-le-Fort, et dans sa partie
nord correspondant au Sud du massif de Coutach. Ensuite il affleure en quelques endroits
isolés, à l’Est de la faille de Corconne : on retrouve ces affleurements au centre de l’aquifère
et tout à l’Est, au bois de Paris. Ces terrains sont très fracturés et karstifiés. Ils sont propices à
une infiltration rapide et importante de l’eau de pluie.
Le reste de l’aquifère est captif. Il est dissimulé sous une couche imperméable de
marnes du Valanginien inférieur. C’est le cas de la partie nord ouest de l’aquifère ainsi que la
majorité de la partie à l’Est de la faille de Corconne. Dans ces zones captives, on peut trouver
au-dessus du toit du Valanginien inférieur d’autres aquifères secondaires. On a, par exemple,
au Nord Ouest, l’aquifère du Valanginien supérieur du causse de l’Hortus, déconnecté de
celui du Lez. Toujours au Nord mais à l’Est de la faille de Corconne, on a l’aquifère calcaire
« de Sauteyrargues » du Hauterivien supérieur. Celui-ci ne semble en relation avec l’aquifère
du Lez qu’en période de crue [Avias et Legrand, 1989]. Enfin au Sud, on a des aquifères
calcaires du Lutétien contenus dans les bassins d’effondrement de Tréviers, Prades-Le-Lez et
Assas. Ces derniers sont essentiellement captifs, recouverts par un toit de marnes et
conglomérats de l’Oligocène (figure 26).
L’aquifère est donc alimenté de deux façons différentes.
Lorsque l’aquifère est libre, il est alimenté de façon directe par les précipitations qui
tombent et s’infiltrent dans la zone non saturée des calcaires affleurants (infiltration diffuse).
Lorsque l’aquifère est captif, il est alimenté de façon indirecte par de nombreuses
pertes qui permettent l’infiltration concentrée des écoulements de surface. Ces pertes se
situent en général sur des accidents tectoniques et/ou au contact entre des formations
imperméables et perméables. On peut citer en particulier (du Nord au Sud), les pertes du Mas
de Vedel (au Sud du massif de Coutach), de Valflaunès, du Mas de Pont situées sur la faille
des Matelles ou la perte du Triadou au Nord de la source du Lez [Bérard, 1983].
L’alimentation par les pertes est néanmoins négligeable comparée à l’alimentation par
la pluie sur les zones libres où le coefficient d’infiltration est de plus de 50 % [Drogue, 1964].
La superficie de la zone d’alimentation a d’ailleurs été estimée par modélisation à 120 km2,
surface qui correspond au karst affleurant [Fleury et al., 2009].
2.3. Fonctionnement hydrogéologique
Des expériences de traçages artificiels et des relevés piézométriques ont permis de
distinguer les principales zones d’alimentation de la source du Lez et la direction
préférentielle des écoulements souterrains qui s’y déroulent. On trouve :
- la zone de Pompignan au Nord – Ouest de la faille de Corconne. Un traceur injecté
dans une perte du ruisseau d’Artigues près de Pompignan a été retrouvé à la source du
Lez (19,7 km plus au Sud) 122 jours plus tard [Drogue, 1964]. On peut supposer que,
dans cette zone, les écoulements prédominants sont NW – SE jusqu’à la faille de
Corconne. En effet, les sondages électriques effectués sur le site montrent une
direction de fracturation préférentielle N 120° à N 150° en profondeur [Le Masne,
1979].
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 79 -
- la zone du causse de Viols-le-Fort au Sud – Ouest de la faille de Corconne. Un traceur
injecté dans une perte du ruisseau d’Yorgues sur la faille de Corconne s’est retrouvé à
la source du Lez (à 4 km) 58 jours plus tard. Dans ce compartiment, les eaux circulent
de façon diffuse à travers toutes les fissures [Drogue, 1964]. L’écoulement souterrain
apparent semble se faire préférentiellement dans la direction NW – SE. Ceci s’appuie,
sur un traçage effectué de l’aven de la Fausse-monnaie vers les sources du Lirou et du
Lez [Bérard, 1983], et sur la mise en évidence d’un drain NW – SE par les données
piézométriques [Avias et Legrand, 1989]. Dans ce compartiment, en période d’étiage,
un équilibre piézométrique s’établit avec le compartiment du Lez, à l’Est de la faille
de Corconne [Avias, 1988]. La communication entre les 2 compartiments existe donc
mais elle est difficile puisque lors de fortes précipitations la source du Lirou déborde.
- la zone du compartiment du Lez à l’Est de la faille de Corconne. Dans ce
compartiment, les écoulements prédominants sont NNE – SSW. Ils se font à travers le
réseau de failles NNE – SSW comme celle de Corconne [Paloc, 1979], dans les joints
de stratification, et dans des galeries importantes notamment près de la source
[Marjolet et Salado, fasc III, 1975]. A l’échelle de l’affleurement, les écoulements
peuvent se faire selon des directions préférentielles différentes. Sur le site du Terrieu
les expériences de pompages d’essai réalisées montrent des écoulements préférentiels
de direction NW-SE [Drogue et Grillot, 1976 ; Jazayeri Noushabadi, 2009].
La grande faille de Corconne a une importance capitale dans le fonctionnement
hydrogéologique de l’aquifère. Elle joue le rôle de drain pour les écoulements NNE-SSW : en
étiage, les piézomètres de Claret, Brissac, Mas de Vedel et Bois de Saint-Mathieu ont une
piézométrie qui suit les rabattements au Lez [Avias et Legrand, 1989]. Elle permet aussi
d’amener au Lez les eaux du Sud du massif de Coutach sur lequel se perd le Brestalou de
Claret, affluent du Vidourle. Cette même faille est par ailleurs responsable d’une
communication difficile entre les compartiments de Viols-le-Fort et du Lez. Elle ralentit les
écoulements NW-SE. Cet effet de barrière se voit en période de crue, puisque toute l’eau
contenue dans le causse de Viols-le-Fort ne se retrouve pas en totalité à la source du Lez. Des
émergences temporaires très importantes apparaissent alors sur la faille des Matelles. Il s’agit
des Boulidous de Saint Jean ou de la source du Lirou.
2.4. Influence du pompage à la source du Lez
A hauteur de la source du Lez, une faille met en contact les calcaires berriasiens de
l’aquifère du Lez avec les marnes valanginiennes imperméables. L’eau est alors bloquée par
les marnes et s’accumule dans l’aquifère. A l’endroit où l’aquifère affleure l’eau va s’écouler
et donner naissance à la source du Lez. Il s’agit d’une source de « karst barré ». Elle est située
à 65 m NGF.
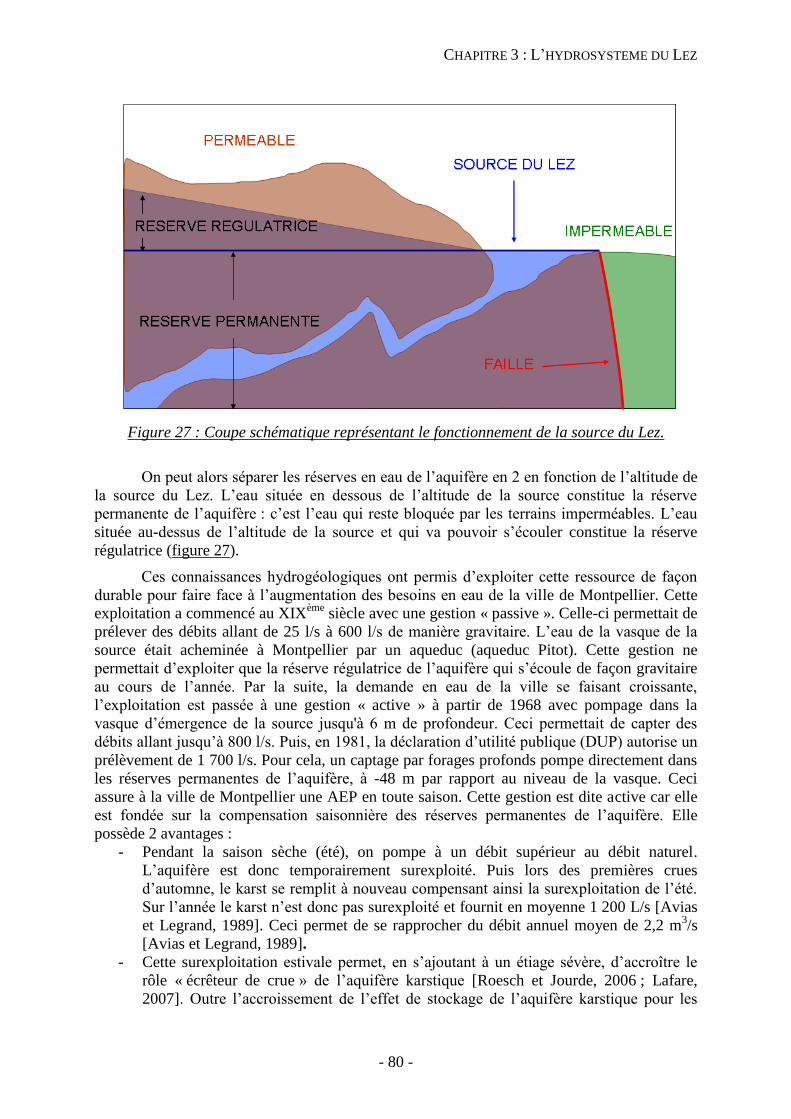
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 80 -
Figure 27 : Coupe schématique représentant le fonctionnement de la source du Lez.
On peut alors séparer les réserves en eau de l’aquifère en 2 en fonction de l’altitude de
la source du Lez. L’eau située en dessous de l’altitude de la source constitue la réserve
permanente de l’aquifère : c’est l’eau qui reste bloquée par les terrains imperméables. L’eau
située au-dessus de l’altitude de la source et qui va pouvoir s’écouler constitue la réserve
régulatrice (figure 27).
Ces connaissances hydrogéologiques ont permis d’exploiter cette ressource de façon
durable pour faire face à l’augmentation des besoins en eau de la ville de Montpellier. Cette
exploitation a commencé au XIXème
siècle avec une gestion « passive ». Celle-ci permettait de
prélever des débits allant de 25 l/s à 600 l/s de manière gravitaire. L’eau de la vasque de la
source était acheminée à Montpellier par un aqueduc (aqueduc Pitot). Cette gestion ne
permettait d’exploiter que la réserve régulatrice de l’aquifère qui s’écoule de façon gravitaire
au cours de l’année. Par la suite, la demande en eau de la ville se faisant croissante,
l’exploitation est passée à une gestion « active » à partir de 1968 avec pompage dans la
vasque d’émergence de la source jusqu'à 6 m de profondeur. Ceci permettait de capter des
débits allant jusqu’à 800 l/s. Puis, en 1981, la déclaration d’utilité publique (DUP) autorise un
prélèvement de 1 700 l/s. Pour cela, un captage par forages profonds pompe directement dans
les réserves permanentes de l’aquifère, à -48 m par rapport au niveau de la vasque. Ceci
assure à la ville de Montpellier une AEP en toute saison. Cette gestion est dite active car elle
est fondée sur la compensation saisonnière des réserves permanentes de l’aquifère. Elle
possède 2 avantages :
- Pendant la saison sèche (été), on pompe à un débit supérieur au débit naturel.
L’aquifère est donc temporairement surexploité. Puis lors des premières crues
d’automne, le karst se remplit à nouveau compensant ainsi la surexploitation de l’été.
Sur l’année le karst n’est donc pas surexploité et fournit en moyenne 1 200 L/s [Avias
et Legrand, 1989]. Ceci permet de se rapprocher du débit annuel moyen de 2,2 m3/s
[Avias et Legrand, 1989].
- Cette surexploitation estivale permet, en s’ajoutant à un étiage sévère, d’accroître le
rôle « écrêteur de crue » de l’aquifère karstique [Roesch et Jourde, 2006 ; Lafare,
2007]. Outre l’accroissement de l’effet de stockage de l’aquifère karstique pour les
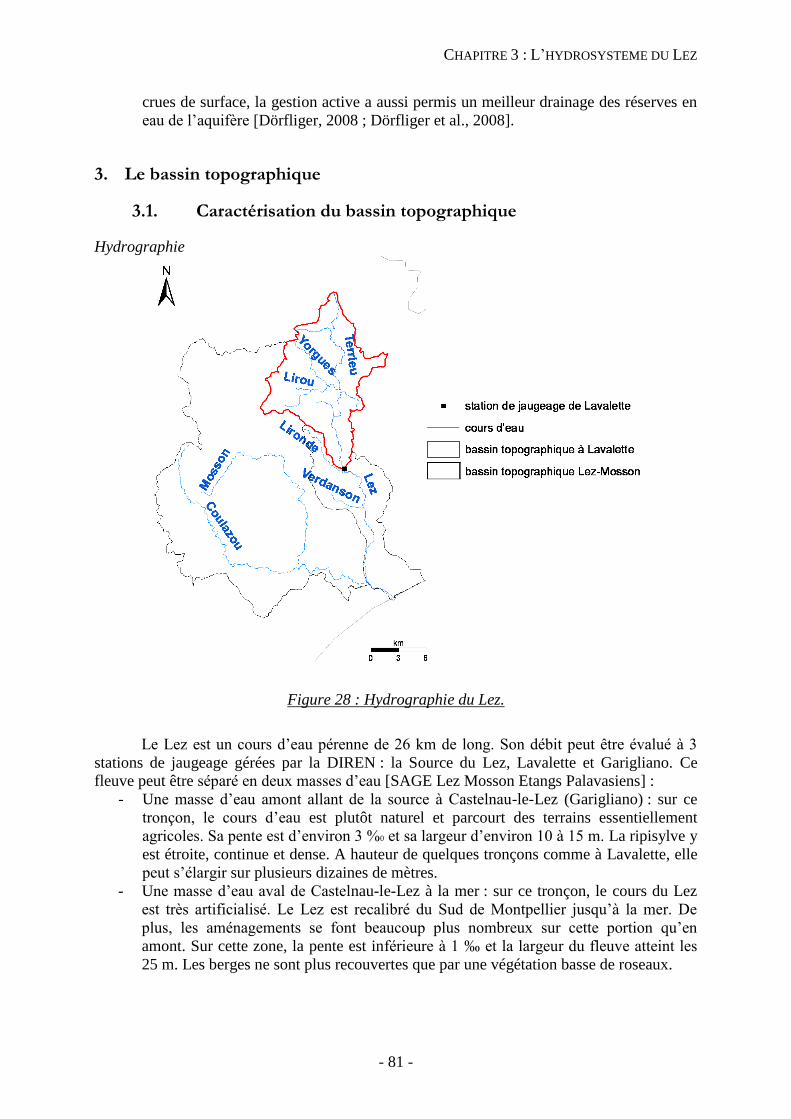
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 81 -
crues de surface, la gestion active a aussi permis un meilleur drainage des réserves en
eau de l’aquifère [Dörfliger, 2008 ; Dörfliger et al., 2008].
3. Le bassin topographique
3.1. Caractérisation du bassin topographique
Hydrographie
Figure 28 : Hydrographie du Lez.
Le Lez est un cours d’eau pérenne de 26 km de long. Son débit peut être évalué à 3
stations de jaugeage gérées par la DIREN : la Source du Lez, Lavalette et Garigliano. Ce
fleuve peut être séparé en deux masses d’eau [SAGE Lez Mosson Etangs Palavasiens] :
- Une masse d’eau amont allant de la source à Castelnau-le-Lez (Garigliano) : sur ce
tronçon, le cours d’eau est plutôt naturel et parcourt des terrains essentiellement
agricoles. Sa pente est d’environ 3 %0 et sa largeur d’environ 10 à 15 m. La ripisylve y
est étroite, continue et dense. A hauteur de quelques tronçons comme à Lavalette, elle
peut s’élargir sur plusieurs dizaines de mètres.
- Une masse d’eau aval de Castelnau-le-Lez à la mer : sur ce tronçon, le cours du Lez
est très artificialisé. Le Lez est recalibré du Sud de Montpellier jusqu’à la mer. De
plus, les aménagements se font beaucoup plus nombreux sur cette portion qu’en
amont. Sur cette zone, la pente est inférieure à 1 ‰ et la largeur du fleuve atteint les
25 m. Les berges ne sont plus recouvertes que par une végétation basse de roseaux.
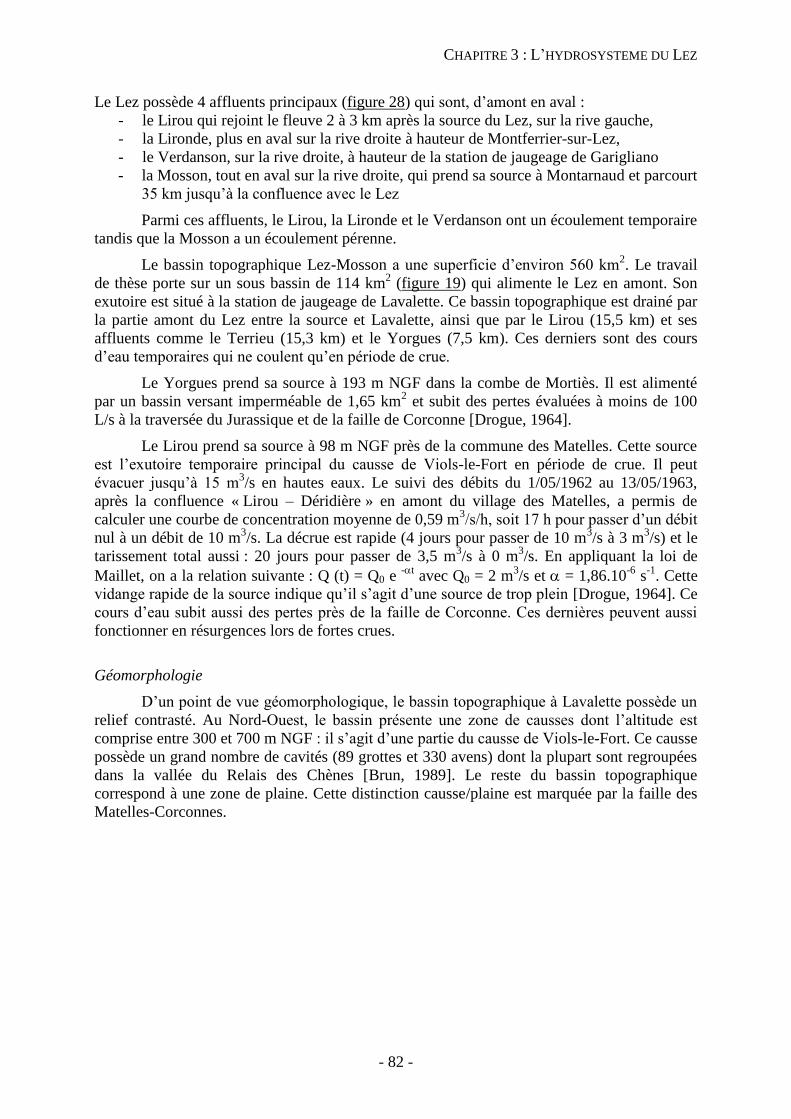
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 82 -
Le Lez possède 4 affluents principaux (figure 28) qui sont, d’amont en aval :
- le Lirou qui rejoint le fleuve 2 à 3 km après la source du Lez, sur la rive gauche,
- la Lironde, plus en aval sur la rive droite à hauteur de Montferrier-sur-Lez,
- le Verdanson, sur la rive droite, à hauteur de la station de jaugeage de Garigliano
- la Mosson, tout en aval sur la rive droite, qui prend sa source à Montarnaud et parcourt
35 km jusqu’à la confluence avec le Lez
Parmi ces affluents, le Lirou, la Lironde et le Verdanson ont un écoulement temporaire
tandis que la Mosson a un écoulement pérenne.
Le bassin topographique Lez-Mosson a une superficie d’environ 560 km2. Le travail
de thèse porte sur un sous bassin de 114 km2 (figure 19) qui alimente le Lez en amont. Son
exutoire est situé à la station de jaugeage de Lavalette. Ce bassin topographique est drainé par
la partie amont du Lez entre la source et Lavalette, ainsi que par le Lirou (15,5 km) et ses
affluents comme le Terrieu (15,3 km) et le Yorgues (7,5 km). Ces derniers sont des cours
d’eau temporaires qui ne coulent qu’en période de crue.
Le Yorgues prend sa source à 193 m NGF dans la combe de Mortiès. Il est alimenté
par un bassin versant imperméable de 1,65 km2 et subit des pertes évaluées à moins de 100
L/s à la traversée du Jurassique et de la faille de Corconne [Drogue, 1964].
Le Lirou prend sa source à 98 m NGF près de la commune des Matelles. Cette source
est l’exutoire temporaire principal du causse de Viols-le-Fort en période de crue. Il peut
évacuer jusqu’à 15 m3/s en hautes eaux. Le suivi des débits du 1/05/1962 au 13/05/1963,
après la confluence « Lirou – Déridière » en amont du village des Matelles, a permis de
calculer une courbe de concentration moyenne de 0,59 m3/s/h, soit 17 h pour passer d’un débit
nul à un débit de 10 m3/s. La décrue est rapide (4 jours pour passer de 10 m
3/s à 3 m
3/s) et le
tarissement total aussi : 20 jours pour passer de 3,5 m3/s à 0 m
3/s. En appliquant la loi de
Maillet, on a la relation suivante : Q (t) = Q0 e -t
avec Q0 = 2 m3/s et = 1,86.10
-6 s
-1. Cette
vidange rapide de la source indique qu’il s’agit d’une source de trop plein [Drogue, 1964]. Ce
cours d’eau subit aussi des pertes près de la faille de Corconne. Ces dernières peuvent aussi
fonctionner en résurgences lors de fortes crues.
Géomorphologie
D’un point de vue géomorphologique, le bassin topographique à Lavalette possède un
relief contrasté. Au Nord-Ouest, le bassin présente une zone de causses dont l’altitude est
comprise entre 300 et 700 m NGF : il s’agit d’une partie du causse de Viols-le-Fort. Ce causse
possède un grand nombre de cavités (89 grottes et 330 avens) dont la plupart sont regroupées
dans la vallée du Relais des Chènes [Brun, 1989]. Le reste du bassin topographique
correspond à une zone de plaine. Cette distinction causse/plaine est marquée par la faille des
Matelles-Corconnes.
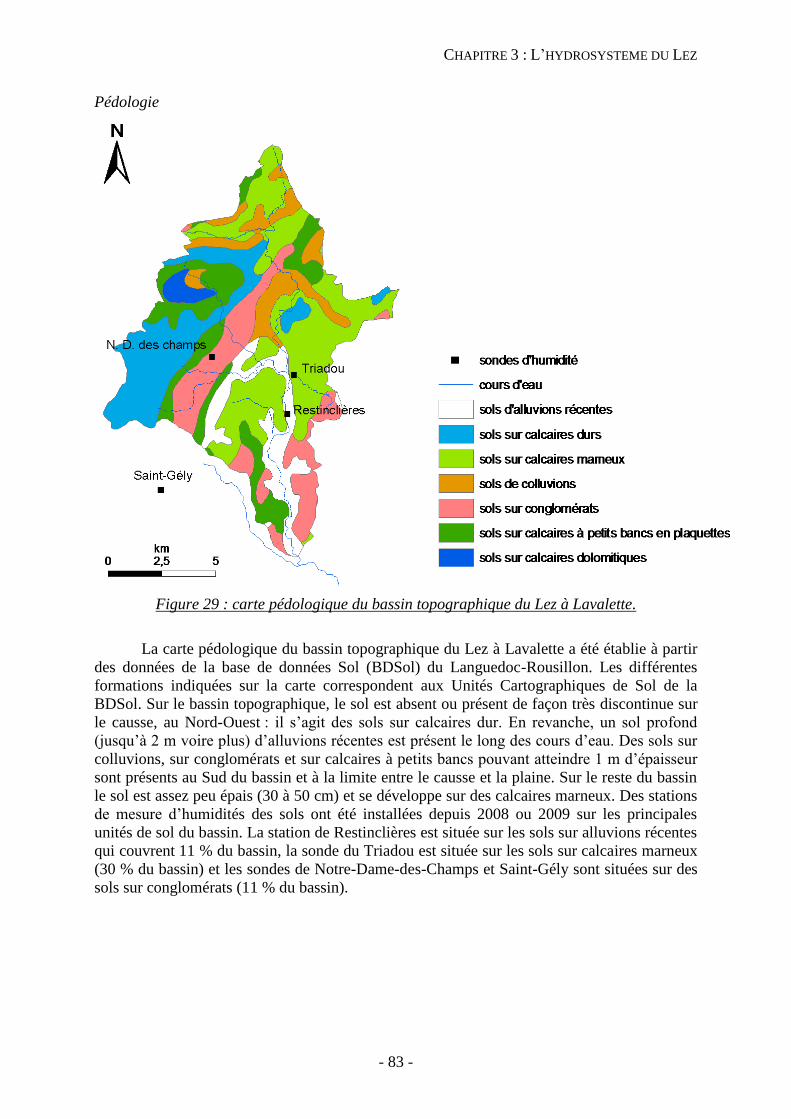
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 83 -
Pédologie
Figure 29 : carte pédologique du bassin topographique du Lez à Lavalette.
La carte pédologique du bassin topographique du Lez à Lavalette a été établie à partir
des données de la base de données Sol (BDSol) du Languedoc-Rousillon. Les différentes
formations indiquées sur la carte correspondent aux Unités Cartographiques de Sol de la
BDSol. Sur le bassin topographique, le sol est absent ou présent de façon très discontinue sur
le causse, au Nord-Ouest : il s’agit des sols sur calcaires dur. En revanche, un sol profond
(jusqu’à 2 m voire plus) d’alluvions récentes est présent le long des cours d’eau. Des sols sur
colluvions, sur conglomérats et sur calcaires à petits bancs pouvant atteindre 1 m d’épaisseur
sont présents au Sud du bassin et à la limite entre le causse et la plaine. Sur le reste du bassin
le sol est assez peu épais (30 à 50 cm) et se développe sur des calcaires marneux. Des stations
de mesure d’humidités des sols ont été installées depuis 2008 ou 2009 sur les principales
unités de sol du bassin. La station de Restinclières est située sur les sols sur alluvions récentes
qui couvrent 11 % du bassin, la sonde du Triadou est située sur les sols sur calcaires marneux
(30 % du bassin) et les sondes de Notre-Dame-des-Champs et Saint-Gély sont situées sur des
sols sur conglomérats (11 % du bassin).
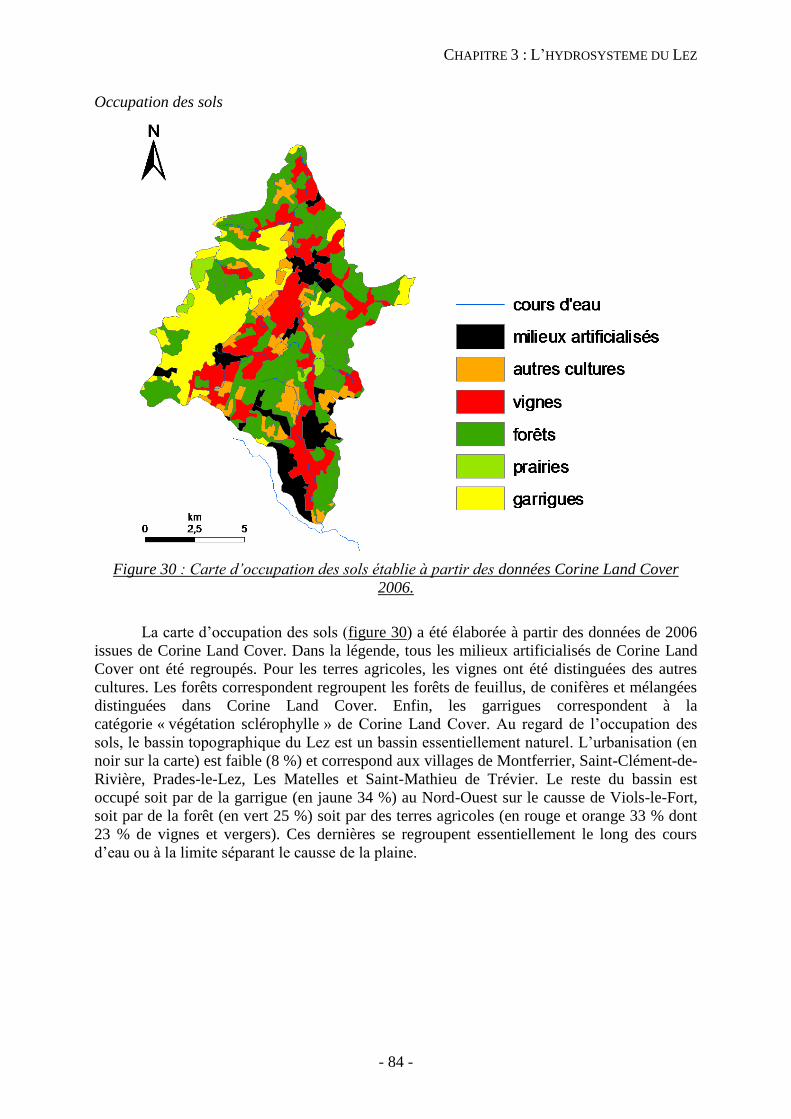
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 84 -
Occupation des sols
Figure 30 : Carte d’occupation des sols établie à partir des données Corine Land Cover
2006.
La carte d’occupation des sols (figure 30) a été élaborée à partir des données de 2006
issues de Corine Land Cover. Dans la légende, tous les milieux artificialisés de Corine Land
Cover ont été regroupés. Pour les terres agricoles, les vignes ont été distinguées des autres
cultures. Les forêts correspondent regroupent les forêts de feuillus, de conifères et mélangées
distinguées dans Corine Land Cover. Enfin, les garrigues correspondent à la
catégorie « végétation sclérophylle » de Corine Land Cover. Au regard de l’occupation des
sols, le bassin topographique du Lez est un bassin essentiellement naturel. L’urbanisation (en
noir sur la carte) est faible (8 %) et correspond aux villages de Montferrier, Saint-Clément-de-
Rivière, Prades-le-Lez, Les Matelles et Saint-Mathieu de Trévier. Le reste du bassin est
occupé soit par de la garrigue (en jaune 34 %) au Nord-Ouest sur le causse de Viols-le-Fort,
soit par de la forêt (en vert 25 %) soit par des terres agricoles (en rouge et orange 33 % dont
23 % de vignes et vergers). Ces dernières se regroupent essentiellement le long des cours
d’eau ou à la limite séparant le causse de la plaine.
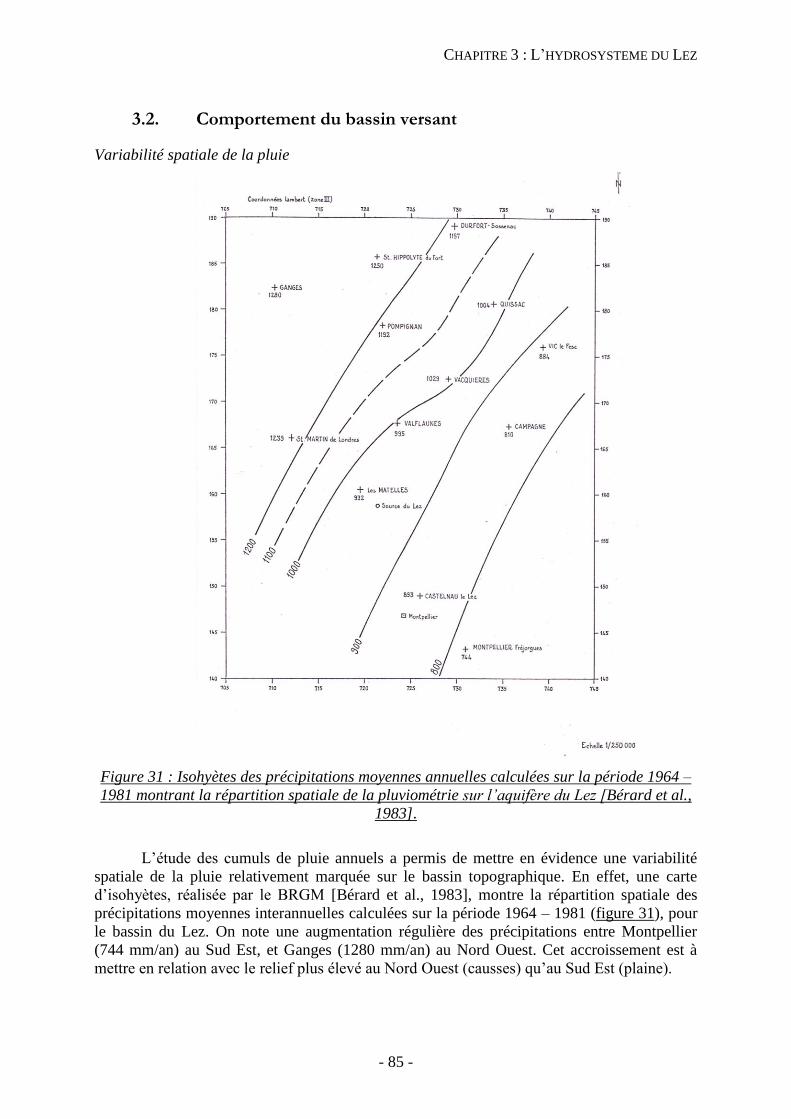
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 85 -
3.2. Comportement du bassin versant
Variabilité spatiale de la pluie
Figure 31 : Isohyètes des précipitations moyennes annuelles calculées sur la période 1964 –
1981 montrant la répartition spatiale de la pluviométrie sur l’aquifère du Lez [Bérard et al.,
1983].
L’étude des cumuls de pluie annuels a permis de mettre en évidence une variabilité
spatiale de la pluie relativement marquée sur le bassin topographique. En effet, une carte
d’isohyètes, réalisée par le BRGM [Bérard et al., 1983], montre la répartition spatiale des
précipitations moyennes interannuelles calculées sur la période 1964 – 1981 (figure 31), pour
le bassin du Lez. On note une augmentation régulière des précipitations entre Montpellier
(744 mm/an) au Sud Est, et Ganges (1280 mm/an) au Nord Ouest. Cet accroissement est à
mettre en relation avec le relief plus élevé au Nord Ouest (causses) qu’au Sud Est (plaine).
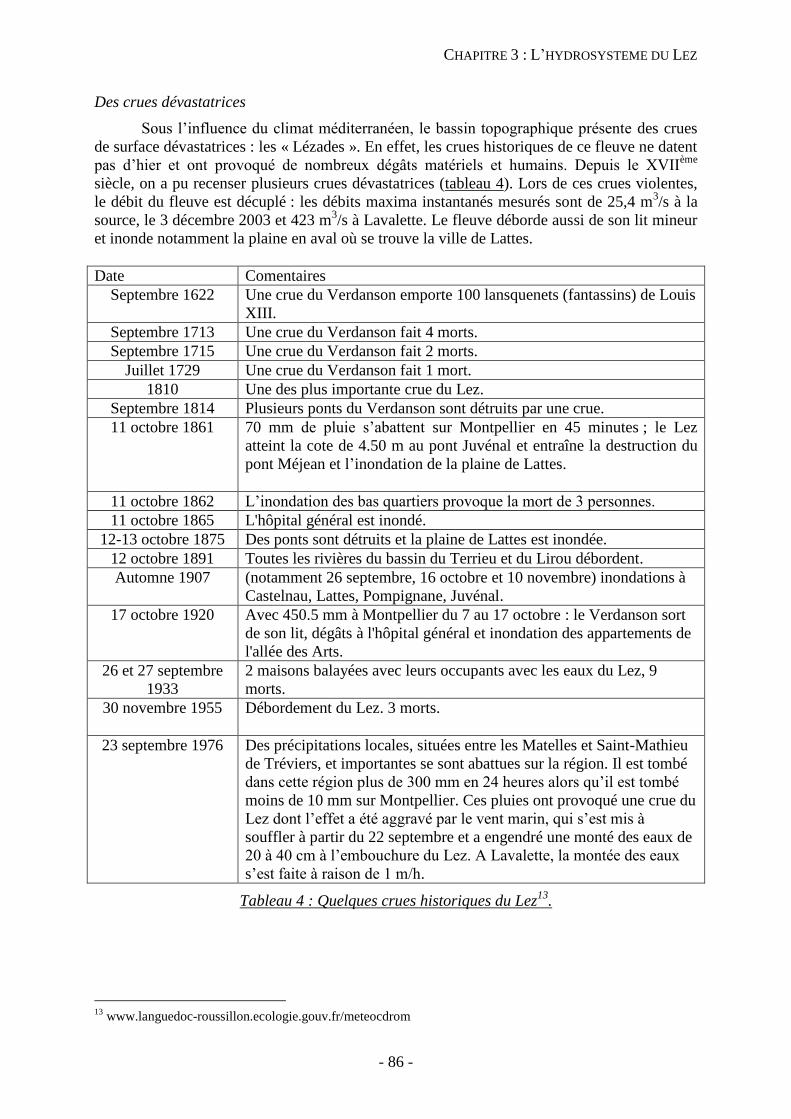
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 86 -
Des crues dévastatrices
Sous l’influence du climat méditerranéen, le bassin topographique présente des crues
de surface dévastatrices : les « Lézades ». En effet, les crues historiques de ce fleuve ne datent
pas d’hier et ont provoqué de nombreux dégâts matériels et humains. Depuis le XVIIème
siècle, on a pu recenser plusieurs crues dévastatrices (tableau 4). Lors de ces crues violentes,
le débit du fleuve est décuplé : les débits maxima instantanés mesurés sont de 25,4 m3/s à la
source, le 3 décembre 2003 et 423 m3/s à Lavalette. Le fleuve déborde aussi de son lit mineur
et inonde notamment la plaine en aval où se trouve la ville de Lattes.
Date Comentaires
Septembre 1622 Une crue du Verdanson emporte 100 lansquenets (fantassins) de Louis
XIII.
Septembre 1713 Une crue du Verdanson fait 4 morts.
Septembre 1715 Une crue du Verdanson fait 2 morts.
Juillet 1729 Une crue du Verdanson fait 1 mort.
1810 Une des plus importante crue du Lez.
Septembre 1814 Plusieurs ponts du Verdanson sont détruits par une crue.
11 octobre 1861 70 mm de pluie s’abattent sur Montpellier en 45 minutes ; le Lez
atteint la cote de 4.50 m au pont Juvénal et entraîne la destruction du
pont Méjean et l’inondation de la plaine de Lattes.
11 octobre 1862 L’inondation des bas quartiers provoque la mort de 3 personnes.
11 octobre 1865 L'hôpital général est inondé.
12-13 octobre 1875 Des ponts sont détruits et la plaine de Lattes est inondée.
12 octobre 1891 Toutes les rivières du bassin du Terrieu et du Lirou débordent.
Automne 1907 (notamment 26 septembre, 16 octobre et 10 novembre) inondations à
Castelnau, Lattes, Pompignane, Juvénal.
17 octobre 1920 Avec 450.5 mm à Montpellier du 7 au 17 octobre : le Verdanson sort
de son lit, dégâts à l'hôpital général et inondation des appartements de
l'allée des Arts.
26 et 27 septembre
1933
2 maisons balayées avec leurs occupants avec les eaux du Lez, 9
morts.
30 novembre 1955 Débordement du Lez. 3 morts.
23 septembre 1976 Des précipitations locales, situées entre les Matelles et Saint-Mathieu
de Tréviers, et importantes se sont abattues sur la région. Il est tombé
dans cette région plus de 300 mm en 24 heures alors qu’il est tombé
moins de 10 mm sur Montpellier. Ces pluies ont provoqué une crue du
Lez dont l’effet a été aggravé par le vent marin, qui s’est mis à
souffler à partir du 22 septembre et a engendré une monté des eaux de
20 à 40 cm à l’embouchure du Lez. A Lavalette, la montée des eaux
s’est faite à raison de 1 m/h.
Tableau 4 : Quelques crues historiques du Lez13
.
13
www.languedoc-roussillon.ecologie.gouv.fr/meteocdrom
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 87 -
La surcote : facteur aggravant l’effet des crues
La région est aussi soumise à des vents14
comme la Tramontane, vent sec du Nord-
Ouest très fréquent en hiver et au printemps, le Grec, vent de l’Est, rare ou le Mistral, vent du
Nord-Est, plus fréquent dans la vallée du Rhône. Le Marin, vent du Sud-Est peut aussi
toucher la région. C’est un vent violent accompagné de pluies importantes. Il peut entraîner à
l’embouchure du Lez une montée des eaux (surcote) aggravant les effets des crues : les aires
inondées sont plus importantes et la décrue plus lente. Ce vent accompagne généralement les
épisodes de pluies cévenoles, liées à un flux de sud.
Le causse lieu d’interaction entre la surface et le souterrain
Au Nord-Ouest du bassin topographique, le causse de Viols-le-Fort correspond à
l’affleurement de l’aquifère karstique. Le ruissellement direct sur ce type de formation est
limité [Drogue, 1964 ; Bailly-Comte et al., 2011]. Le grand nombre de cavités qu’il contient
suggère une bonne communication entre le bassin topographique et le bassin
hydrogéologique. Les interactions entre ces deux bassins font l’objet du paragraphe suivant.
3.3. Interactions « surface-souterrain »
Une question posée par les systèmes karstiques tels que celui du bassin du Lez est
l'évaluation d’une possible contribution de l'aquifère aux crues de surface. La participation de
l’aquifère peut alors se faire de façon ponctuelle par contribution des écoulements souterrains
par les sources ou par saturation de la capacité de stockage du karst affleurant sur le bassin
topographique.
La contribution des écoulements souterrains par les sources ne peut se faire que sur la
partie amont du bassin topographique, la partie aval étant recouverte de roches imperméables.
Cette contribution par les sources permet ainsi aux pluies tombées sur la zone d’alimentation
de l’aquifère située à l’extérieur du bassin topographique de participer à la crue de surface.
Cette participation peut se faire de 2 manières différentes : soit l’eau de pluie qui tombe sur la
zone d’alimentation transite jusqu’à la source par le réseau de conduits karstiques (transfert de
masse), soit l’eau de pluie pousse l’eau déjà présente dans l’aquifère et la fait sortir par les
sources (transfert de pression). Des études géochimiques effectuées à la source du Lez ont en
effet identifié lors des premières crues de l’automne une augmentation de la minéralisation
des eaux en début d’épisode pluvieux. Cette augmentation serait due à un effet piston
(transfert de pression) [Caetano Bicalho, 2010]. Au regard des sources instrumentées (source
du Lez et source du Lirou), la contribution par les sources reste faible comparée aux débits les
plus forts constatés à Lavalette. En effet, les débits de pointe maxima mesurés à la source du
Lez et à celle du Lirou sont respectivement aux alentours de 25 m3/s et 15 m
3/s. Ceci est très
inférieur comparé au débit de pointe maximum mesuré à Lavalette aux alentours de 500 m3/s.
La contribution peut aussi se faire par saturation de la capacité de stockage du karst
affleurant sur le bassin topographique. Dans ce cas, plusieurs situations peuvent se présenter.
En étudiant trois épisodes de crue, Roesch et Jourde (2006) identifient 3 comportements
distincts de l’aquifère qui sont fonction de la localisation du maximum d’intensité pluvieuse
et de l’état initial de l’aquifère. Lafare (2007) confirme les conclusions de cette étude en
travaillant sur 6 épisodes de crues répartis entre 2001 et 2005.
14
www.meteofrance.fr
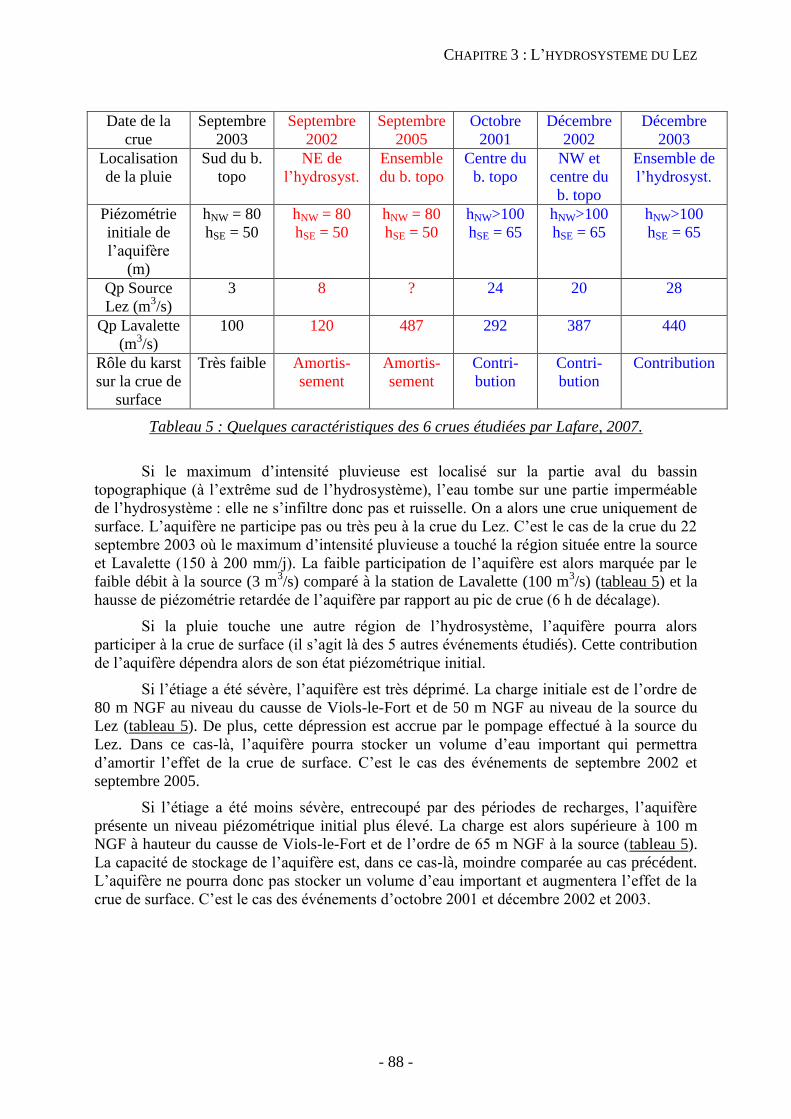
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 88 -
Date de la
crue
Septembre
2003
Septembre
2002
Septembre
2005
Octobre
2001
Décembre
2002
Décembre
2003
Localisation
de la pluie
Sud du b.
topo
NE de
l’hydrosyst.
Ensemble
du b. topo
Centre du
b. topo
NW et
centre du
b. topo
Ensemble de
l’hydrosyst.
Piézométrie
initiale de
l’aquifère
(m)
hNW = 80
hSE = 50
hNW = 80
hSE = 50
hNW = 80
hSE = 50
hNW>100
hSE = 65
hNW>100
hSE = 65
hNW>100
hSE = 65
Qp Source
Lez (m3/s)
3 8 ? 24 20 28
Qp Lavalette
(m3/s)
100 120 487 292 387 440
Rôle du karst
sur la crue de
surface
Très faible Amortis-
sement
Amortis-
sement
Contri-
bution
Contri-
bution
Contribution
Tableau 5 : Quelques caractéristiques des 6 crues étudiées par Lafare, 2007.
Si le maximum d’intensité pluvieuse est localisé sur la partie aval du bassin
topographique (à l’extrême sud de l’hydrosystème), l’eau tombe sur une partie imperméable
de l’hydrosystème : elle ne s’infiltre donc pas et ruisselle. On a alors une crue uniquement de
surface. L’aquifère ne participe pas ou très peu à la crue du Lez. C’est le cas de la crue du 22
septembre 2003 où le maximum d’intensité pluvieuse a touché la région située entre la source
et Lavalette (150 à 200 mm/j). La faible participation de l’aquifère est alors marquée par le
faible débit à la source (3 m3/s) comparé à la station de Lavalette (100 m
3/s) (tableau 5) et la
hausse de piézométrie retardée de l’aquifère par rapport au pic de crue (6 h de décalage).
Si la pluie touche une autre région de l’hydrosystème, l’aquifère pourra alors
participer à la crue de surface (il s’agit là des 5 autres événements étudiés). Cette contribution
de l’aquifère dépendra alors de son état piézométrique initial.
Si l’étiage a été sévère, l’aquifère est très déprimé. La charge initiale est de l’ordre de
80 m NGF au niveau du causse de Viols-le-Fort et de 50 m NGF au niveau de la source du
Lez (tableau 5). De plus, cette dépression est accrue par le pompage effectué à la source du
Lez. Dans ce cas-là, l’aquifère pourra stocker un volume d’eau important qui permettra
d’amortir l’effet de la crue de surface. C’est le cas des événements de septembre 2002 et
septembre 2005.
Si l’étiage a été moins sévère, entrecoupé par des périodes de recharges, l’aquifère
présente un niveau piézométrique initial plus élevé. La charge est alors supérieure à 100 m
NGF à hauteur du causse de Viols-le-Fort et de l’ordre de 65 m NGF à la source (tableau 5).
La capacité de stockage de l’aquifère est, dans ce cas-là, moindre comparée au cas précédent.
L’aquifère ne pourra donc pas stocker un volume d’eau important et augmentera l’effet de la
crue de surface. C’est le cas des événements d’octobre 2001 et décembre 2002 et 2003.
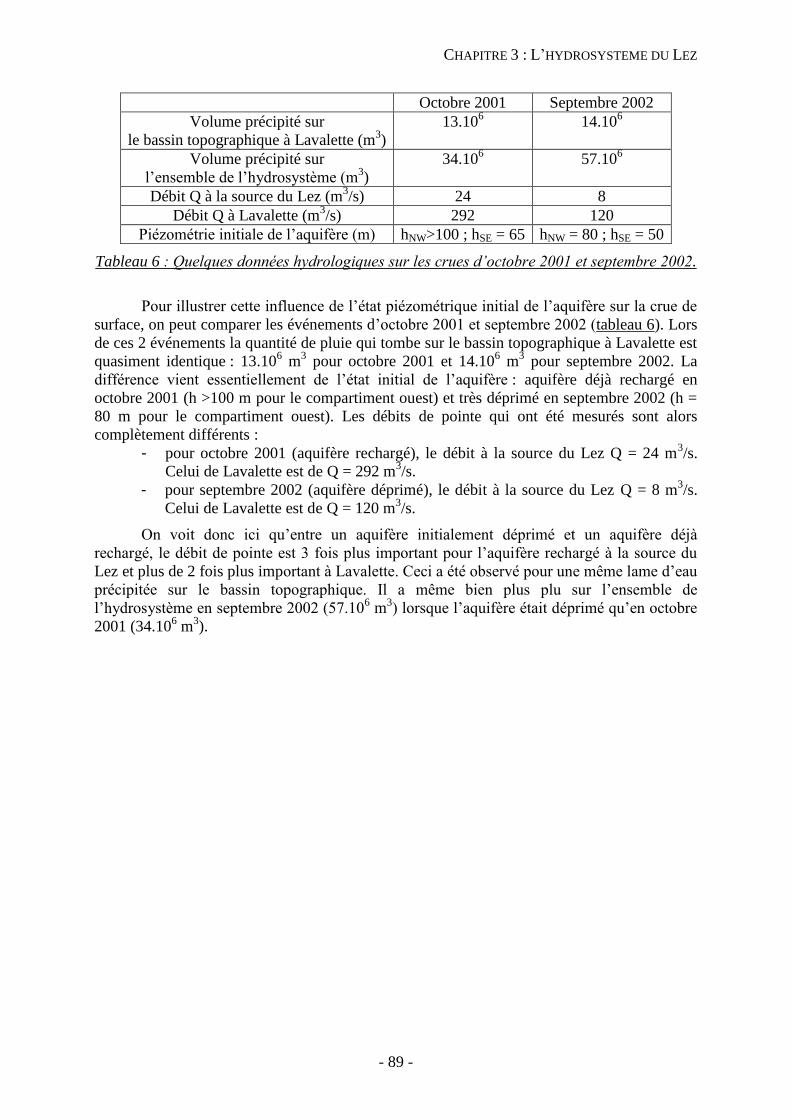
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 89 -
Octobre 2001 Septembre 2002
Volume précipité sur
le bassin topographique à Lavalette (m3)
13.106 14.10
6
Volume précipité sur
l’ensemble de l’hydrosystème (m3)
34.106 57.10
6
Débit Q à la source du Lez (m3/s) 24 8
Débit Q à Lavalette (m3/s) 292 120
Piézométrie initiale de l’aquifère (m) hNW>100 ; hSE = 65 hNW = 80 ; hSE = 50
Tableau 6 : Quelques données hydrologiques sur les crues d’octobre 2001 et septembre 2002.
Pour illustrer cette influence de l’état piézométrique initial de l’aquifère sur la crue de
surface, on peut comparer les événements d’octobre 2001 et septembre 2002 (tableau 6). Lors
de ces 2 événements la quantité de pluie qui tombe sur le bassin topographique à Lavalette est
quasiment identique : 13.106 m
3 pour octobre 2001 et 14.10
6 m
3 pour septembre 2002. La
différence vient essentiellement de l’état initial de l’aquifère : aquifère déjà rechargé en
octobre 2001 (h >100 m pour le compartiment ouest) et très déprimé en septembre 2002 (h =
80 m pour le compartiment ouest). Les débits de pointe qui ont été mesurés sont alors
complètement différents :
- pour octobre 2001 (aquifère rechargé), le débit à la source du Lez Q = 24 m3/s.
Celui de Lavalette est de Q = 292 m3/s.
- pour septembre 2002 (aquifère déprimé), le débit à la source du Lez Q = 8 m3/s.
Celui de Lavalette est de Q = 120 m3/s.
On voit donc ici qu’entre un aquifère initialement déprimé et un aquifère déjà
rechargé, le débit de pointe est 3 fois plus important pour l’aquifère rechargé à la source du
Lez et plus de 2 fois plus important à Lavalette. Ceci a été observé pour une même lame d’eau
précipitée sur le bassin topographique. Il a même bien plus plu sur l’ensemble de
l’hydrosystème en septembre 2002 (57.106 m
3) lorsque l’aquifère était déprimé qu’en octobre
2001 (34.106 m
3).
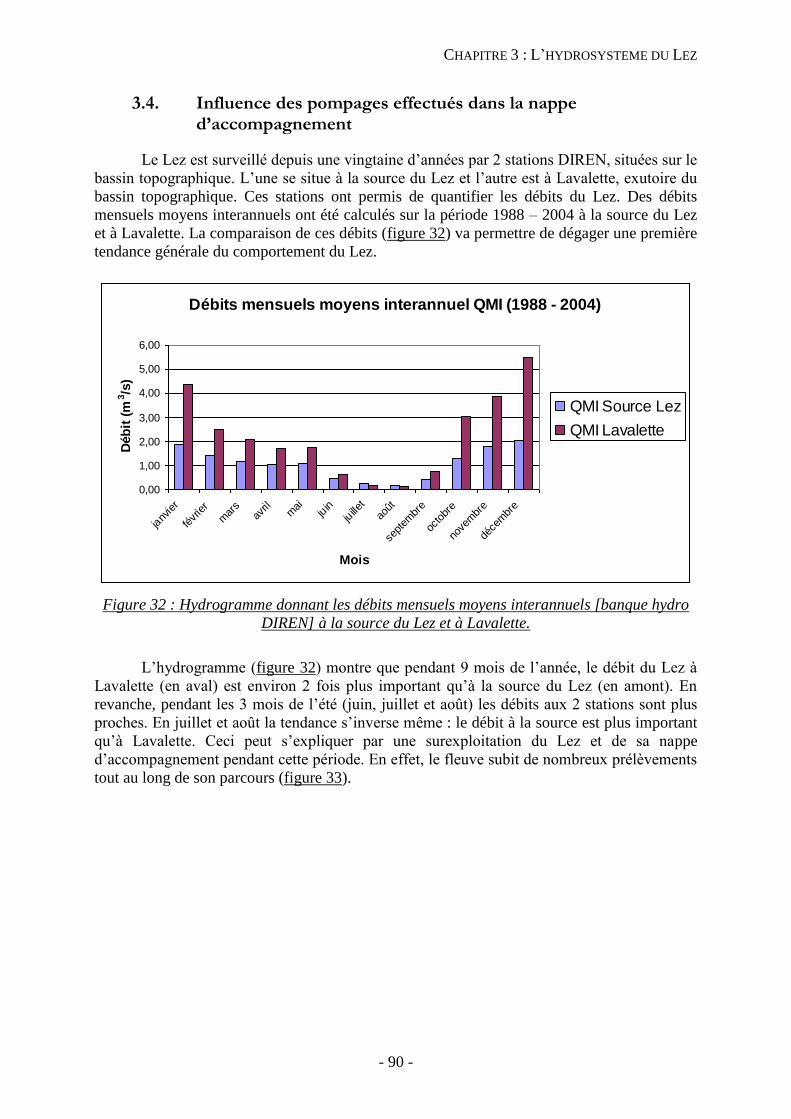
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 90 -
3.4. Influence des pompages effectués dans la nappe d’accompagnement
Le Lez est surveillé depuis une vingtaine d’années par 2 stations DIREN, situées sur le
bassin topographique. L’une se situe à la source du Lez et l’autre est à Lavalette, exutoire du
bassin topographique. Ces stations ont permis de quantifier les débits du Lez. Des débits
mensuels moyens interannuels ont été calculés sur la période 1988 – 2004 à la source du Lez
et à Lavalette. La comparaison de ces débits (figure 32) va permettre de dégager une première
tendance générale du comportement du Lez.
Figure 32 : Hydrogramme donnant les débits mensuels moyens interannuels [banque hydro
DIREN] à la source du Lez et à Lavalette.
L’hydrogramme (figure 32) montre que pendant 9 mois de l’année, le débit du Lez à
Lavalette (en aval) est environ 2 fois plus important qu’à la source du Lez (en amont). En
revanche, pendant les 3 mois de l’été (juin, juillet et août) les débits aux 2 stations sont plus
proches. En juillet et août la tendance s’inverse même : le débit à la source est plus important
qu’à Lavalette. Ceci peut s’expliquer par une surexploitation du Lez et de sa nappe
d’accompagnement pendant cette période. En effet, le fleuve subit de nombreux prélèvements
tout au long de son parcours (figure 33).
Débits mensuels moyens interannuel QMI (1988 - 2004)
0,00
1,00
2,00
3,00
4,00
5,00
6,00
janv
ier
févr
ier
mar
sav
rilm
aiju
inju
illet
août
sept
embr
e
octo
bre
nove
mbr
e
déce
mbr
e
Mois
Déb
it (
m3/s
)
QMI Source Lez
QMI Lavalette
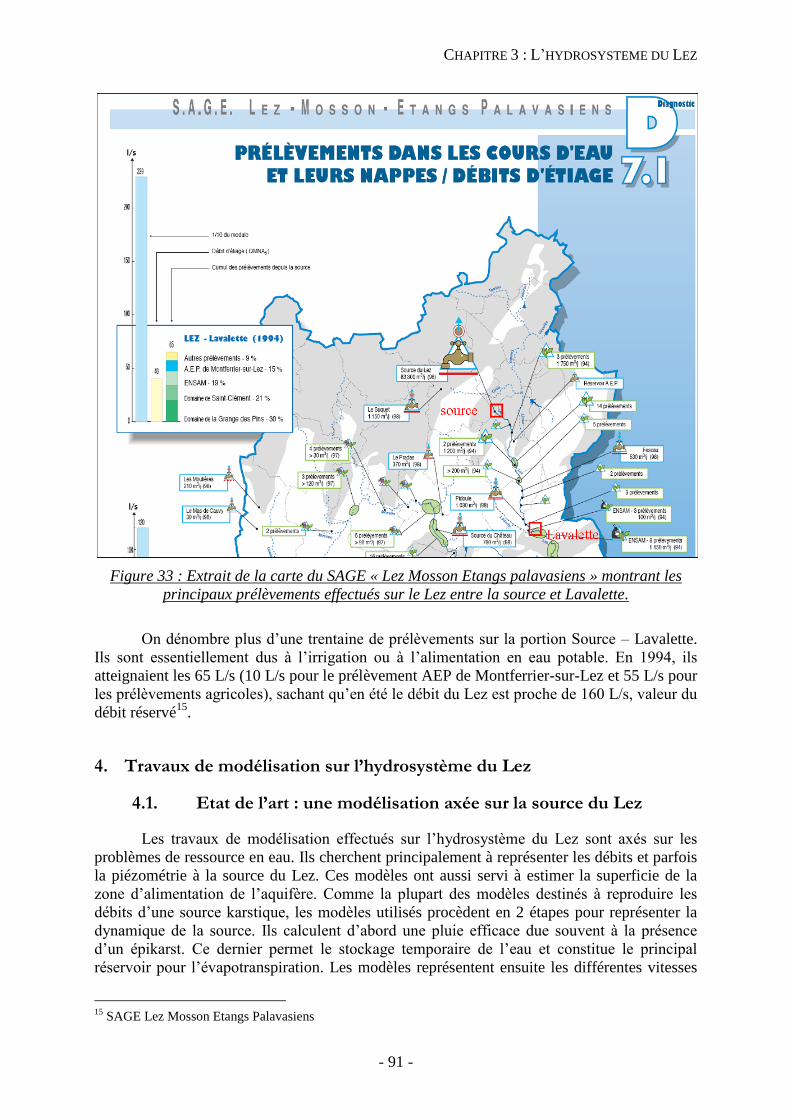
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 91 -
Figure 33 : Extrait de la carte du SAGE « Lez Mosson Etangs palavasiens » montrant les
principaux prélèvements effectués sur le Lez entre la source et Lavalette.
On dénombre plus d’une trentaine de prélèvements sur la portion Source – Lavalette.
Ils sont essentiellement dus à l’irrigation ou à l’alimentation en eau potable. En 1994, ils
atteignaient les 65 L/s (10 L/s pour le prélèvement AEP de Montferrier-sur-Lez et 55 L/s pour
les prélèvements agricoles), sachant qu’en été le débit du Lez est proche de 160 L/s, valeur du
débit réservé15
.
4. Travaux de modélisation sur l’hydrosystème du Lez
4.1. Etat de l’art : une modélisation axée sur la source du Lez
Les travaux de modélisation effectués sur l’hydrosystème du Lez sont axés sur les
problèmes de ressource en eau. Ils cherchent principalement à représenter les débits et parfois
la piézométrie à la source du Lez. Ces modèles ont aussi servi à estimer la superficie de la
zone d’alimentation de l’aquifère. Comme la plupart des modèles destinés à reproduire les
débits d’une source karstique, les modèles utilisés procèdent en 2 étapes pour représenter la
dynamique de la source. Ils calculent d’abord une pluie efficace due souvent à la présence
d’un épikarst. Ce dernier permet le stockage temporaire de l’eau et constitue le principal
réservoir pour l’évapotranspiration. Les modèles représentent ensuite les différentes vitesses
15
SAGE Lez Mosson Etangs Palavasiens
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 92 -
d’écoulements existantes dans le karst : écoulements lents à travers les fissures et rapides à
travers les drains. Plusieurs types de modèles ont été conçus.
Certains utilisent des modèles de type « boîte noire ». Karam (1989) propose une
régression linéaire multiple entre le débit à la source et 3 piézomètres représentatifs de
l’aquifère du Lez. Cette régression permet de prévoir le débit à la source connaissant le niveau
de trois piézomètres avec un délai de 1 à 10 jours maximum. La prévision est satisfaisante
pour un délai de 1 jour et se détériore lorsque ce délai augmente. Kong A Siou (2011) utilise
un réseau de neurones pour reproduire les débits à la source du Lez à un pas de temps
journalier.
Les modèles à réservoir restent les plus utilisés. Chemin (1974) utilise le modèle
MERO fonctionnant en continu et à pas de temps journalier. Il est constitué de 2 réservoirs et
3 paramètres. Il s’agit à l’origine d’un modèle de bilan hydrologique permettant d’estimer
l’évapotranspiration réelle (tout comme la méthode de Thörntwaite). Dans les travaux sur le
Lez, le modèle est d’abord calibré sur un aquifère voisin (celui de Saugras) dont les
caractéristiques sont proches de celui du Lez. Le modèle ainsi calé est ensuite utilisé sur
l’aquifère du Lez. Testé sur 2 cycles d’1 an et demi chacun, l’un humide et l’autre sec, le
modèle donne une zone d’alimentation de la source du Lez de 200 km2, résultat en accord
avec les estimations de Drogue (1964).
Guilbot (1976) utilise le modèle pluie-débit CREC fonctionnant en continu et à pas de
temps journalier. Ce modèle est constitué de 5 réservoirs et 10 paramètres. Il donne de bonnes
simulations et une zone d’alimentation de l’ordre de 200 km2. Néanmoins, on constate une
sous-estimation des crues et une légère surestimation des étiages.
Thiéry et Bérard (1983) développent le modèle KARINE fonctionnant en continu à
pas de temps pentadaire. Ce modèle est fait de 3 réservoirs et 12 paramètres qui permettent
une simulation de la piézométrie et des débits à la source. Il est calibré sur la période 1977-
1981 et validé sur la période 1982-1983. Il donne des simulations satisfaisantes de la
piézométrie. Compte tenu de l’estimation peu fiable des débits de l’époque, le contrôle sur les
débits est fait uniquement à titre indicatif. Il permet néanmoins d’exclure l’hypothèse d’une
zone d’alimentation de 400 km2. Ce modèle possédant un grand nombre de paramètre est
destiné à être simplifié.
Fleury et al. (2009) proposent une version simplifiée du modèle KARINE sous
VENSIM fonctionnant en continu à pas de temps journalier. Ce modèle est constitué de 3
réservoirs et 6 paramètres. Il donne la piézométrie et le débit à la source. L’estimation des
débits étant plus fiable, le modèle est contraint à la fois par la piézométrie et le débit à la
source. La calibration et la validation se font sur une période plus importante qu’en 1983 et
pour une exploitation du karst en gestion active. Les simulations sont satisfaisantes et la zone
d’alimentation est estimée à 130 km2, surface correspondant aux calcaires affleurants de
l’aquifère.
Un modèle à base physique a aussi été développé. Il est proposé par Karam (1989). Il
s’agit d’un modèle déterministe simplifié fonctionnant à pas de temps journalier sur les
périodes d’étiages de l’été 1984 (pour la calibration) et de l’été 1985 (pour la validation). Ce
modèle donne la piézométrie à la source en période d’étiage, et indique que les eaux de la
source du Lez proviennent essentiellement des régions situées au Nord et que l’apport du
Causse de Viols-le-Fort au Sud-Ouest est faible.
Tous ces modèles s’intéressent à la ressource en eau de l’aquifère du Lez. Leur but est
soit d’estimer la superficie de la zone d’alimentation de l’aquifère (but principal des premières
modélisations de Chemin (1974) et Guilbot (1976), soit de mieux en comprendre le
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 93 -
fonctionnement (but du modèle déterministe de Karam (1989) soit d’en prévoir son évolution
pour une meilleure gestion de la ressource (modèles de Thiéry et Bérard (1983), de Fleury et
al. (2009) et de Kong A Siou (2011)). Ils fonctionnent généralement en continu ce qui
nécessite l’estimation de l’évapotranspiration souvent délicate et semble-t-il principale source
d’erreur dans la modélisation continue des aquifères karstiques [Marsaud, 1996]. Leur pas de
temps est journalier ce qui ne permet pas de reproduire avec suffisamment de finesse la
dynamique des crues rapides du Lez.
4.2. Comment modéliser les crues de surface sur un bassin karstique ?
Outre la forte porosité secondaire et l’organisation hiérarchique des vides à l’origine
de la dynamique particulière des sources, le karst est souvent le siège d’une forte interaction
« souterrain-surface ». Cette interaction permet une communication importante entre le bassin
topographique (en surface) et le bassin hydrogéologique (en profondeur). Cette
communication est également rapide du fait des vitesses élevées des écoulements à l’intérieur
du karst et des brusques (c’est-à-dire rapides et importantes) montées du niveau
piézométrique. Les crues de surface peuvent donc être fortement influencées par les
écoulements souterrains. Si les bassins topographique et hydrogéologique ne se superposent
pas, limiter l’hydrosystème au bassin topographique ne suffit pas à représenter correctement
la crue de surface. En effet, une modélisation de surface effectuée avec MIKE 11 (modèle
distribué à base physique) sur le bassin karstique du Coulazou montre une forte sous-
estimation de la pointe de crue lors de l’événement d’avril 2004 [Jourde et al., 2007]. De la
même manière, une modélisation de surface effectuée avec TOPKAPI (modèle distribué à
base physique) sur un bassin karstique au centre de la Sardaigne montre une forte sous-
estimation des pics de crue [De Waele et al., 2010]. Dans les 2 cas, la différence entre les
débits simulés et observés est attribuée aux échanges (gains ou pertes) s’effectuant le long de
la rivière entre la surface et le réseau de drainage karstique sous-jacent. Il est essentiel de
prendre en compte ces échanges lorsqu’on modélise ce type de crue karstique. On ne doit
donc plus considérer le bassin topographique comme un système fermé mais comme un
système ouvert qui échange avec l’extérieur. On définit alors un terme d’échange souvent
appelé Intercatchment Groundwater Flux (IGF) (écoulements souterrains entre bassins
versants) dans la littérature. Il s’agit d’échanges entre le bassin considéré et les bassins
voisins. Ce terme peut être utilisé pour représenter les variations temporelles des limites d’un
aquifère karstique [Jukic et Denic-Jukic, 2009] ou pour représenter les échanges entre le
bassin topographique et l’aquifère karstique [Le Moine et al., 2008]. Lorsque ces échanges
concernent le bassin topographique et l’aquifère karstique, ce dernier est généralement
représenté par un unique réservoir à seuil qui se vidange. Il n’est plus question ici de
représenter la cinétique des écoulements à l’intérieur du karst. Le but est de simuler le
stockage (jusqu’à un certain seuil) et le déstockage de l’eau (au-delà du seuil) par l’aquifère
karstique au cours de la crue. Ces stockages et déstockages correspondent aux IGF. Les
études cherchant à représenter ces effets de stockage et déstockage du karst restent rares.
Le Moine et al. (2008) étudient le système karstique de La Rochefoucauld en
Charente. Ce dernier est constitué d’un bassin topographique karstique dans sa partie aval où
les cours d’eau de la Tardoire et du Bandiat se perdent en partie ou en totalité. Ces pertes
alimentent la source karstique de Touvre, deuxième source de France avec un débit annuel
moyen de 13 m3/s. Pour représenter correctement le débit à l’exutoire du bassin
topographique, le modèle GR4J est aménagé pour simuler les IGF et ainsi tenir compte des
pertes en aval du bassin. Ces pertes alimentent ensuite un réservoir dont la vidange est de type
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 94 -
loi puissance et permet de reproduire les débits de la source de Touvre, exutoire du bassin
karstique souterrain.
Maréchal et al. (2008) étudient la crue de Nîmes de septembre 2005 et plus
particulièrement la contribution du karst au débit du cadereau (terme local désignant un cours
d’eau temporaire) d’Alès. L’événement de septembre 2005 est constitué de 2 épisodes de
pluies successifs. Lors du premier épisode de pluie le karst stocke la pluie qui tombe à sa
surface et le débit dans le cadereau en surface est faible. Puis, lors du deuxième épisode de
pluie, le karst est saturé et le débit dans le cadereau est beaucoup plus important. La saturation
du karst à la suite du premier épisode de pluie aggrave donc la crue dans le cadereau. Une
modélisation inverse réalisée avec le logiciel TEMPO est utilisée pour simuler le niveau
piézométrique à un endroit du karst et ainsi prévenir sa saturation.
Bailly-Comte et al. (2011) étudient les crues du Coulazou, cours d’eau temporaire,
affluent de la Mosson. Cette rivière prend naissance sur un bassin au substratum imperméable
avant de traverser un système karstique : le causse d’Aumelas. A la sortie du causse, le débit
du Coulazou est fortement influencé par les échanges souterrain-surface se produisant sur la
partie karstique. L’amplitude et la nature (perte ou gain) de ses échanges « souterrain-
surface » dépendent des caractéristiques de la pluie et de l’état de remplissage du karst en
début d’événement. Un modèle pluie-débit conceptuel semi-distribué fonctionnant au pas de
temps de 5 minutes permet alors de caractériser et de quantifier ces échanges « souterrain-
surface ». Ce modèle représente le karst par un réservoir, alimenté par des pertes, qui possède
un seuil et se vidange.
Dans ces études, l’effet de stockage et/ou de déstockage du karst est pris en compte de
façon relativement simple à l’aide d’un réservoir ou des fonctions de transfert simulant l’état
de remplissage du karst. Il est primordial de prendre en compte cet état en début d’événement
[Bailly-Comte et al., 2011].
CHAPITRE 3 : L’HYDROSYSTEME DU LEZ
- 95 -
5. Conclusion
L’hydrosystème du Lez a un fonctionnement complexe. La structure de son bassin
hydrogéologique a été dictée par l’histoire géologique de la région qui en a fait un aquifère
compartimenté au fonctionnement encore mal connu. Cette histoire géologique a également
façonné les caractéristiques du bassin topographique à Lavalette. Ce bassin encore peu
urbanisé est constitué d’une zone de plaine au Sud et à l’Est. Celle-ci est occupée par des
terres agricoles le long des cours d’eau et à proximité du causse, aux endroits où les sols sont
épais. La forêt occupe le reste de ce secteur où les sols sont moins épais. Cette partie du
bassin présente quelques zones où l’aquifère karstique affleure pouvant donner naissance à
des sources comme celle du Lez et permettant ainsi une première interaction « surface-
souterrain » au travers de ces sources. Au Nord-Ouest du bassin topographique, se trouve une
zone de causse. La garrigue occupe cette partie où l’aquifère karstique affleure et où le sol est
absent ou présent de façon très discontinue. Les nombreuses cavités recensées sur cette zone
laissent penser à une bonne interaction « surface-souterrain ». L’aquifère peut alors jouer sur
les crues de surface par sa capacité de stockage. Son rôle « écrêteur de crue » va alors
dépendre de son niveau piézométrique en début d’événement comme le suggère l’étude de
quelques épisodes sur l’hydrosystème du Lez ou des hydrosystèmes voisins comme ceux du
Coulazou ou de Nîmes.
Cet hydrosystème est soumis à un climat méditerranéen caractérisé par une forte
variabilité des pluies. L’hydrosystème est donc marqué par des sécheresses en été et des crues
en automne. Il suscite donc depuis des décennies l’intérêt des scientifiques. Les
hydrogéologues et hydrochimistes s’intéressent au problème de la ressource en eau pour
pallier au problème de sécheresse en été et protéger la ressource en eau disponible alors que
les hydrologues s’intéressent au problème des crues et à leur prévision pour améliorer la
protection des biens et des personnes des villes situées à proximité du Lez. Le projet « Lez
Gestion Multi Usages »16
, dans lequel s’inscrit ce travail de thèse, en est une illustration
récente. Depuis 2008, ce projet s’intéresse au fonctionnement de cet hydrosystème et en
particulier à l’impact de sa gestion active sur son fonctionnement hydrogéologique et ses
crues de surface en contexte ou non de changement climatique. Face à ces nombreux
problèmes, un nombre important de données a été acquis sur cet hydrosystème afin de mieux
comprendre sa dynamique et gérer son évolution. L’observatoire MEDYCYSS (observatoire
Multi-Echelle de la DYnamique des Crues et de l’hYdrodynamique Souterraine en milieu
karStique) regroupe aujourd’hui les données acquises sur cet hydrosystème et s’appuie sur un
réseau de mesures important [Jourde et al., 2011]. Il fait donc du Lez un site privilégié pour
l’étude des crues karstiques méditerranéennes. Le chapitre suivant décrit les données ayant
permis de réaliser ce travail de thèse.
16
Le projet Lez Gestion Multi Usages est porté par le BRGM, financé par l’agglomération de Montpellier,
l’AERM&C, le Conseil Général de l’Hérault, le Conseil Régional du Languedoc Roussillon, la DIREN et le
BRGM) avec pour partenaires scientifiques le BRGM, HSM, G-EAU, le CERFACS, BIOTOPE et TETIS (2008
– 2012)

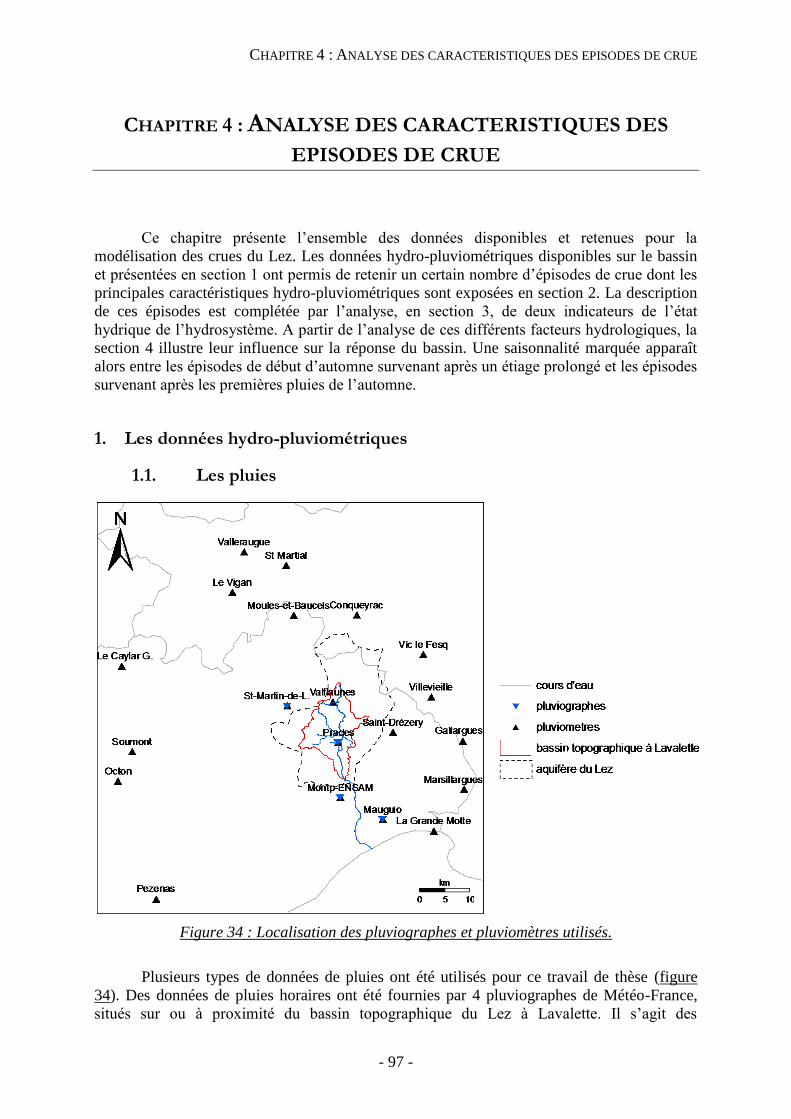
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 97 -
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES
EPISODES DE CRUE
Ce chapitre présente l’ensemble des données disponibles et retenues pour la
modélisation des crues du Lez. Les données hydro-pluviométriques disponibles sur le bassin
et présentées en section 1 ont permis de retenir un certain nombre d’épisodes de crue dont les
principales caractéristiques hydro-pluviométriques sont exposées en section 2. La description
de ces épisodes est complétée par l’analyse, en section 3, de deux indicateurs de l’état
hydrique de l’hydrosystème. A partir de l’analyse de ces différents facteurs hydrologiques, la
section 4 illustre leur influence sur la réponse du bassin. Une saisonnalité marquée apparaît
alors entre les épisodes de début d’automne survenant après un étiage prolongé et les épisodes
survenant après les premières pluies de l’automne.
1. Les données hydro-pluviométriques
1.1. Les pluies
Figure 34 : Localisation des pluviographes et pluviomètres utilisés.
Plusieurs types de données de pluies ont été utilisés pour ce travail de thèse (figure
34). Des données de pluies horaires ont été fournies par 4 pluviographes de Météo-France,
situés sur ou à proximité du bassin topographique du Lez à Lavalette. Il s’agit des
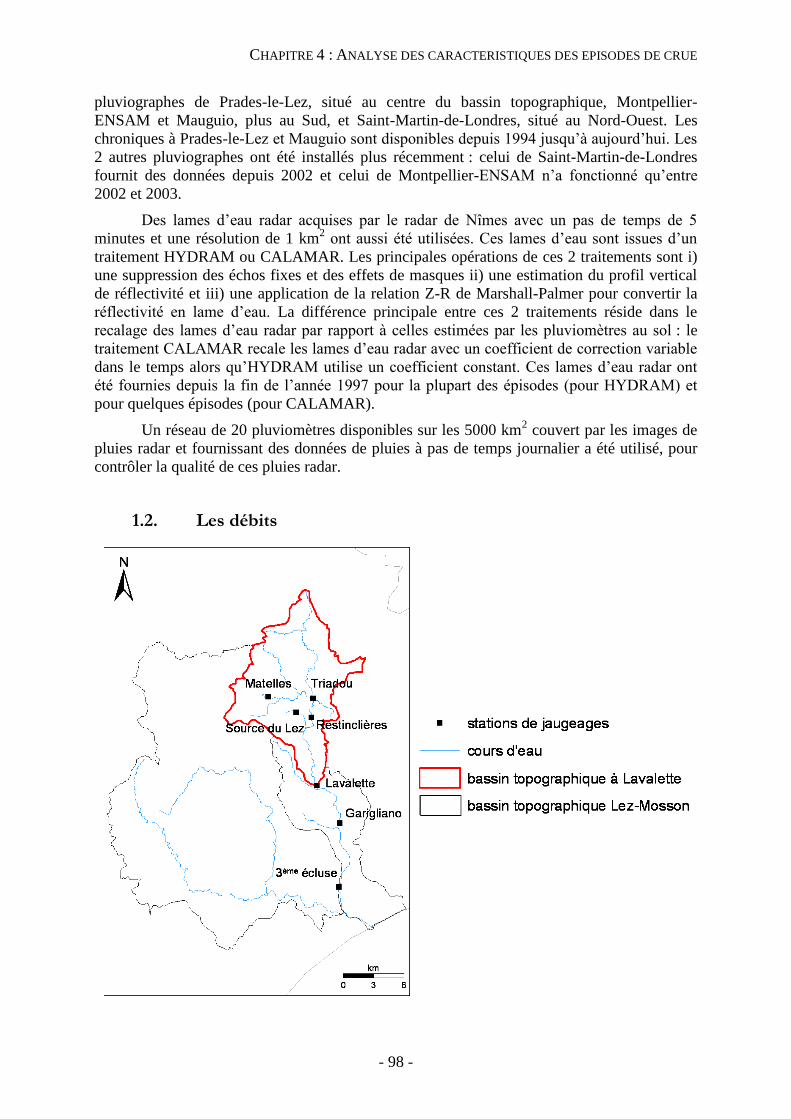
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 98 -
pluviographes de Prades-le-Lez, situé au centre du bassin topographique, Montpellier-
ENSAM et Mauguio, plus au Sud, et Saint-Martin-de-Londres, situé au Nord-Ouest. Les
chroniques à Prades-le-Lez et Mauguio sont disponibles depuis 1994 jusqu’à aujourd’hui. Les
2 autres pluviographes ont été installés plus récemment : celui de Saint-Martin-de-Londres
fournit des données depuis 2002 et celui de Montpellier-ENSAM n’a fonctionné qu’entre
2002 et 2003.
Des lames d’eau radar acquises par le radar de Nîmes avec un pas de temps de 5
minutes et une résolution de 1 km2 ont aussi été utilisées. Ces lames d’eau sont issues d’un
traitement HYDRAM ou CALAMAR. Les principales opérations de ces 2 traitements sont i)
une suppression des échos fixes et des effets de masques ii) une estimation du profil vertical
de réflectivité et iii) une application de la relation Z-R de Marshall-Palmer pour convertir la
réflectivité en lame d’eau. La différence principale entre ces 2 traitements réside dans le
recalage des lames d’eau radar par rapport à celles estimées par les pluviomètres au sol : le
traitement CALAMAR recale les lames d’eau radar avec un coefficient de correction variable
dans le temps alors qu’HYDRAM utilise un coefficient constant. Ces lames d’eau radar ont
été fournies depuis la fin de l’année 1997 pour la plupart des épisodes (pour HYDRAM) et
pour quelques épisodes (pour CALAMAR).
Un réseau de 20 pluviomètres disponibles sur les 5000 km2 couvert par les images de
pluies radar et fournissant des données de pluies à pas de temps journalier a été utilisé, pour
contrôler la qualité de ces pluies radar.
1.2. Les débits
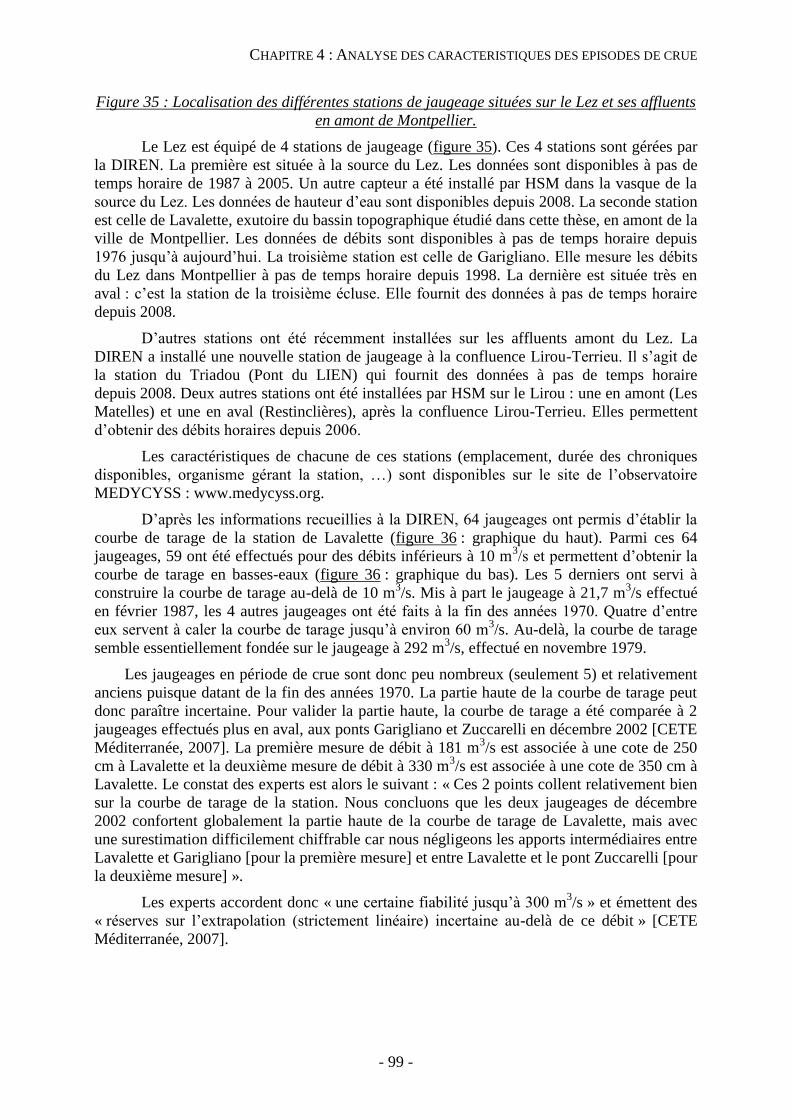
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 99 -
Figure 35 : Localisation des différentes stations de jaugeage situées sur le Lez et ses affluents
en amont de Montpellier.
Le Lez est équipé de 4 stations de jaugeage (figure 35). Ces 4 stations sont gérées par
la DIREN. La première est située à la source du Lez. Les données sont disponibles à pas de
temps horaire de 1987 à 2005. Un autre capteur a été installé par HSM dans la vasque de la
source du Lez. Les données de hauteur d’eau sont disponibles depuis 2008. La seconde station
est celle de Lavalette, exutoire du bassin topographique étudié dans cette thèse, en amont de la
ville de Montpellier. Les données de débits sont disponibles à pas de temps horaire depuis
1976 jusqu’à aujourd’hui. La troisième station est celle de Garigliano. Elle mesure les débits
du Lez dans Montpellier à pas de temps horaire depuis 1998. La dernière est située très en
aval : c’est la station de la troisième écluse. Elle fournit des données à pas de temps horaire
depuis 2008.
D’autres stations ont été récemment installées sur les affluents amont du Lez. La
DIREN a installé une nouvelle station de jaugeage à la confluence Lirou-Terrieu. Il s’agit de
la station du Triadou (Pont du LIEN) qui fournit des données à pas de temps horaire
depuis 2008. Deux autres stations ont été installées par HSM sur le Lirou : une en amont (Les
Matelles) et une en aval (Restinclières), après la confluence Lirou-Terrieu. Elles permettent
d’obtenir des débits horaires depuis 2006.
Les caractéristiques de chacune de ces stations (emplacement, durée des chroniques
disponibles, organisme gérant la station, …) sont disponibles sur le site de l’observatoire
MEDYCYSS : www.medycyss.org.
D’après les informations recueillies à la DIREN, 64 jaugeages ont permis d’établir la
courbe de tarage de la station de Lavalette (figure 36 : graphique du haut). Parmi ces 64
jaugeages, 59 ont été effectués pour des débits inférieurs à 10 m3/s et permettent d’obtenir la
courbe de tarage en basses-eaux (figure 36 : graphique du bas). Les 5 derniers ont servi à
construire la courbe de tarage au-delà de 10 m3/s. Mis à part le jaugeage à 21,7 m
3/s effectué
en février 1987, les 4 autres jaugeages ont été faits à la fin des années 1970. Quatre d’entre
eux servent à caler la courbe de tarage jusqu’à environ 60 m3/s. Au-delà, la courbe de tarage
semble essentiellement fondée sur le jaugeage à 292 m3/s, effectué en novembre 1979.
Les jaugeages en période de crue sont donc peu nombreux (seulement 5) et relativement
anciens puisque datant de la fin des années 1970. La partie haute de la courbe de tarage peut
donc paraître incertaine. Pour valider la partie haute, la courbe de tarage a été comparée à 2
jaugeages effectués plus en aval, aux ponts Garigliano et Zuccarelli en décembre 2002 [CETE
Méditerranée, 2007]. La première mesure de débit à 181 m3/s est associée à une cote de 250
cm à Lavalette et la deuxième mesure de débit à 330 m3/s est associée à une cote de 350 cm à
Lavalette. Le constat des experts est alors le suivant : « Ces 2 points collent relativement bien
sur la courbe de tarage de la station. Nous concluons que les deux jaugeages de décembre
2002 confortent globalement la partie haute de la courbe de tarage de Lavalette, mais avec
une surestimation difficilement chiffrable car nous négligeons les apports intermédiaires entre
Lavalette et Garigliano [pour la première mesure] et entre Lavalette et le pont Zuccarelli [pour
la deuxième mesure] ».
Les experts accordent donc « une certaine fiabilité jusqu’à 300 m3/s » et émettent des
« réserves sur l’extrapolation (strictement linéaire) incertaine au-delà de ce débit » [CETE
Méditerranée, 2007].
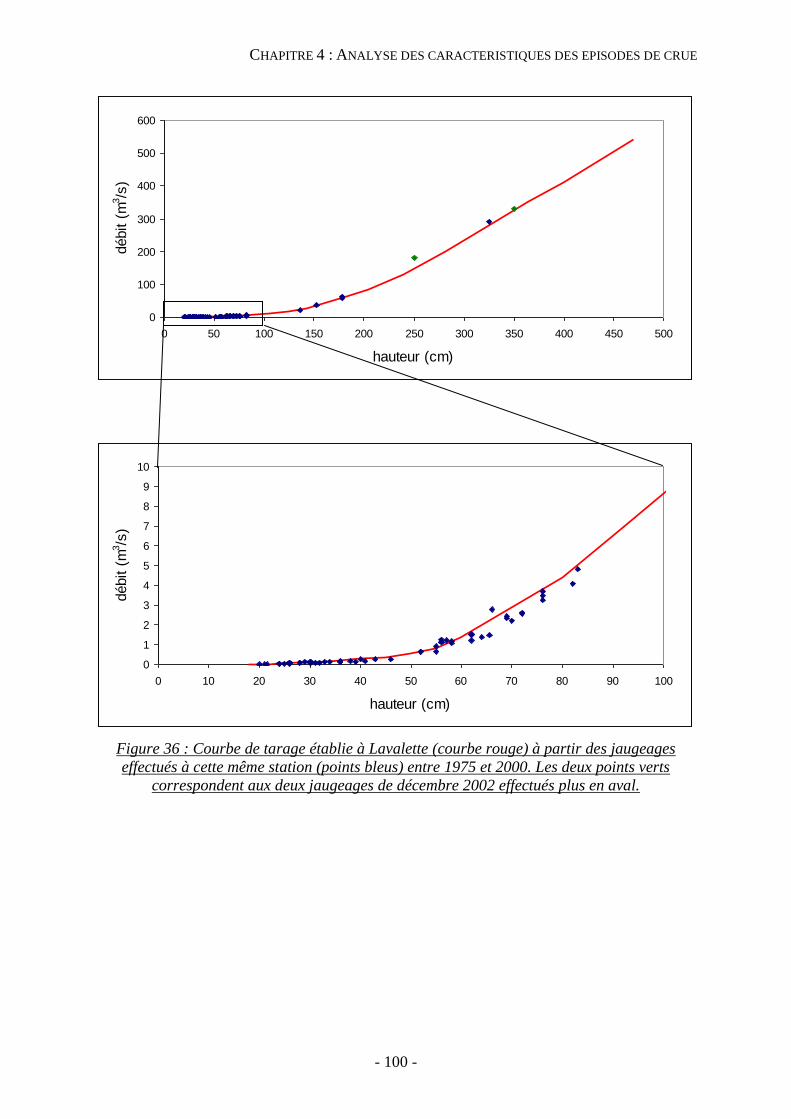
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 100 -
Figure 36 : Courbe de tarage établie à Lavalette (courbe rouge) à partir des jaugeages
effectués à cette même station (points bleus) entre 1975 et 2000. Les deux points verts
correspondent aux deux jaugeages de décembre 2002 effectués plus en aval.
0
100
200
300
400
500
600
0 50 100 150 200 250 300 350 400 450 500
hauteur (cm)
débit (
m3/s
)
0
1
2
3
4
5
6
7
8
9
10
0 10 20 30 40 50 60 70 80 90 100
hauteur (cm)
débit (
m3/s
)
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 101 -
2. Caractéristiques des épisodes de crue
2.1. Délimitation des épisodes
La sélection des épisodes s’est faite sur la période 1994-2008 pour laquelle des
données de pluies horaires existent sur le bassin topographique et des débits horaires sont
disponibles à la station de jaugeage de Lavalette, exutoire du bassin topographique étudié. Sur
cette période, les épisodes ont été sélectionnés en fonction de leur cumul de pluie et de leur
débit de pointe.
La sélection sur le cumul de pluie s’est faite avec la chronique de pluie journalière à
Prades, seul pluviomètre situé sur le bassin topographique. Un seuil de pluie significative est
placé à 1 mm et deux épisodes sont considérés comme indépendants s’ils sont séparés de plus
d’un jour sans pluie. Tous les épisodes présentant un cumul de pluie supérieur à 90 mm ont
été sélectionnés. A ces premiers épisodes s’ajoutent tous ceux dont le cumul de pluie est
inférieur à 90 mm mais dont le débit de pointe est supérieur à 45 m3/s. 37 épisodes respectent
au moins un des deux critères de sélection : 18 épisodes ont à la fois un débit de pointe
supérieur à 45 m3/s et un cumul de pluie supérieur à 90 mm ; 12 n’ont qu’un cumul de pluie
supérieur à 90 mm ; 7 épisodes n’ont qu’un débit de pointe supérieur à 45 m3/s (tableau 7).
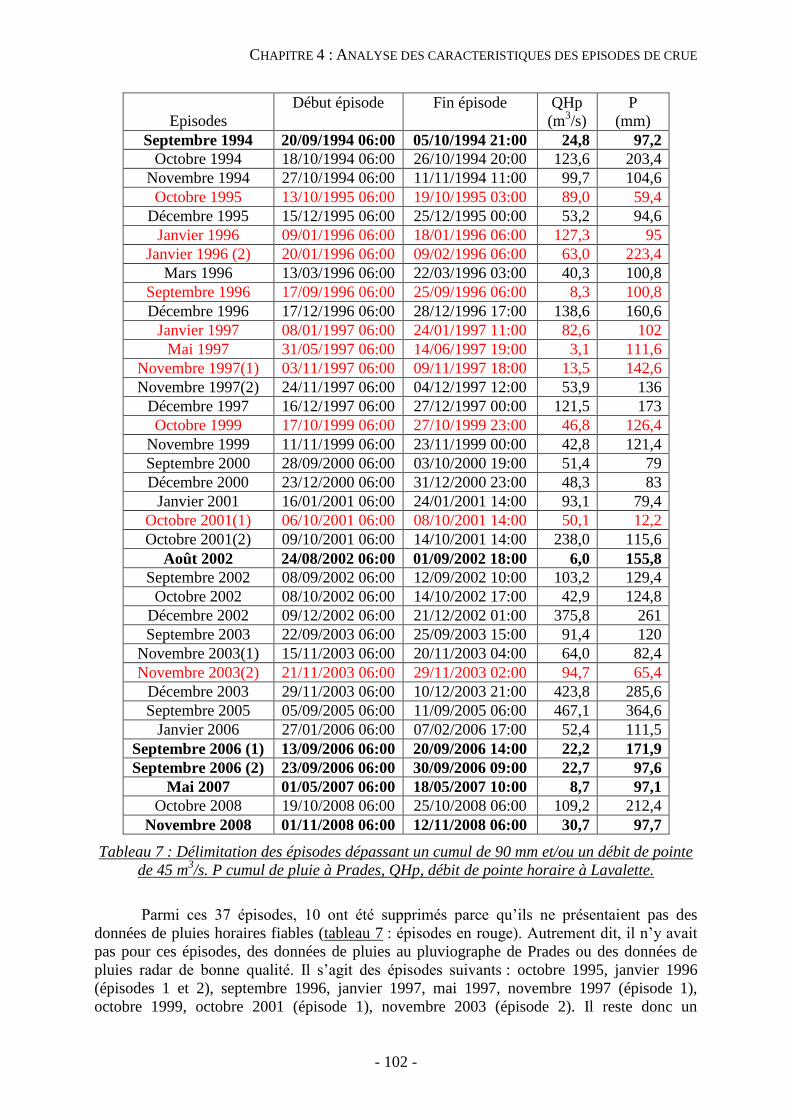
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 102 -
Episodes
Début épisode Fin épisode QHp
(m3/s)
P
(mm)
Septembre 1994 20/09/1994 06:00 05/10/1994 21:00 24,8 97,2
Octobre 1994 18/10/1994 06:00 26/10/1994 20:00 123,6 203,4
Novembre 1994 27/10/1994 06:00 11/11/1994 11:00 99,7 104,6
Octobre 1995 13/10/1995 06:00 19/10/1995 03:00 89,0 59,4
Décembre 1995 15/12/1995 06:00 25/12/1995 00:00 53,2 94,6
Janvier 1996 09/01/1996 06:00 18/01/1996 06:00 127,3 95
Janvier 1996 (2) 20/01/1996 06:00 09/02/1996 06:00 63,0 223,4
Mars 1996 13/03/1996 06:00 22/03/1996 03:00 40,3 100,8
Septembre 1996 17/09/1996 06:00 25/09/1996 06:00 8,3 100,8
Décembre 1996 17/12/1996 06:00 28/12/1996 17:00 138,6 160,6
Janvier 1997 08/01/1997 06:00 24/01/1997 11:00 82,6 102
Mai 1997 31/05/1997 06:00 14/06/1997 19:00 3,1 111,6
Novembre 1997(1) 03/11/1997 06:00 09/11/1997 18:00 13,5 142,6
Novembre 1997(2) 24/11/1997 06:00 04/12/1997 12:00 53,9 136
Décembre 1997 16/12/1997 06:00 27/12/1997 00:00 121,5 173
Octobre 1999 17/10/1999 06:00 27/10/1999 23:00 46,8 126,4
Novembre 1999 11/11/1999 06:00 23/11/1999 00:00 42,8 121,4
Septembre 2000 28/09/2000 06:00 03/10/2000 19:00 51,4 79
Décembre 2000 23/12/2000 06:00 31/12/2000 23:00 48,3 83
Janvier 2001 16/01/2001 06:00 24/01/2001 14:00 93,1 79,4
Octobre 2001(1) 06/10/2001 06:00 08/10/2001 14:00 50,1 12,2
Octobre 2001(2) 09/10/2001 06:00 14/10/2001 14:00 238,0 115,6
Août 2002 24/08/2002 06:00 01/09/2002 18:00 6,0 155,8
Septembre 2002 08/09/2002 06:00 12/09/2002 10:00 103,2 129,4
Octobre 2002 08/10/2002 06:00 14/10/2002 17:00 42,9 124,8
Décembre 2002 09/12/2002 06:00 21/12/2002 01:00 375,8 261
Septembre 2003 22/09/2003 06:00 25/09/2003 15:00 91,4 120
Novembre 2003(1) 15/11/2003 06:00 20/11/2003 04:00 64,0 82,4
Novembre 2003(2) 21/11/2003 06:00 29/11/2003 02:00 94,7 65,4
Décembre 2003 29/11/2003 06:00 10/12/2003 21:00 423,8 285,6
Septembre 2005 05/09/2005 06:00 11/09/2005 06:00 467,1 364,6
Janvier 2006 27/01/2006 06:00 07/02/2006 17:00 52,4 111,5
Septembre 2006 (1) 13/09/2006 06:00 20/09/2006 14:00 22,2 171,9
Septembre 2006 (2) 23/09/2006 06:00 30/09/2006 09:00 22,7 97,6
Mai 2007 01/05/2007 06:00 18/05/2007 10:00 8,7 97,1
Octobre 2008 19/10/2008 06:00 25/10/2008 06:00 109,2 212,4
Novembre 2008 01/11/2008 06:00 12/11/2008 06:00 30,7 97,7
Tableau 7 : Délimitation des épisodes dépassant un cumul de 90 mm et/ou un débit de pointe
de 45 m3/s. P cumul de pluie à Prades, QHp, débit de pointe horaire à Lavalette.
Parmi ces 37 épisodes, 10 ont été supprimés parce qu’ils ne présentaient pas des
données de pluies horaires fiables (tableau 7 : épisodes en rouge). Autrement dit, il n’y avait
pas pour ces épisodes, des données de pluies au pluviographe de Prades ou des données de
pluies radar de bonne qualité. Il s’agit des épisodes suivants : octobre 1995, janvier 1996
(épisodes 1 et 2), septembre 1996, janvier 1997, mai 1997, novembre 1997 (épisode 1),
octobre 1999, octobre 2001 (épisode 1), novembre 2003 (épisode 2). Il reste donc un
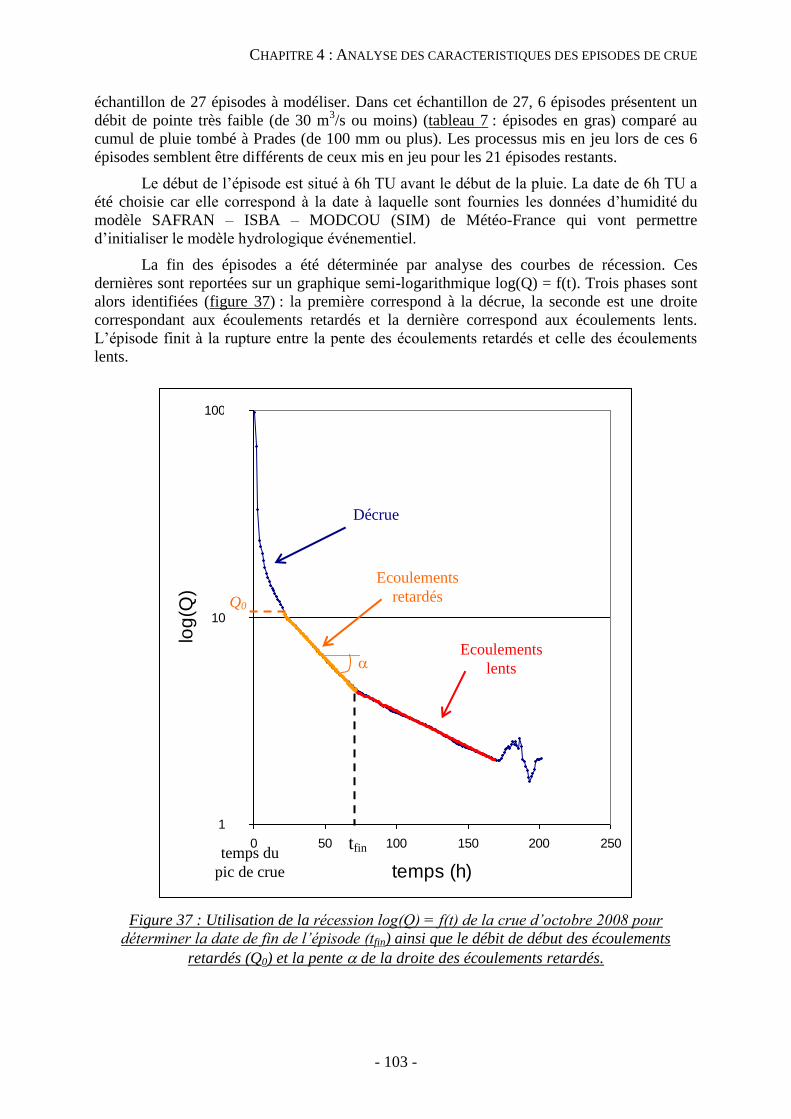
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 103 -
échantillon de 27 épisodes à modéliser. Dans cet échantillon de 27, 6 épisodes présentent un
débit de pointe très faible (de 30 m3/s ou moins) (tableau 7 : épisodes en gras) comparé au
cumul de pluie tombé à Prades (de 100 mm ou plus). Les processus mis en jeu lors de ces 6
épisodes semblent être différents de ceux mis en jeu pour les 21 épisodes restants.
Le début de l’épisode est situé à 6h TU avant le début de la pluie. La date de 6h TU a
été choisie car elle correspond à la date à laquelle sont fournies les données d’humidité du
modèle SAFRAN – ISBA – MODCOU (SIM) de Météo-France qui vont permettre
d’initialiser le modèle hydrologique événementiel.
La fin des épisodes a été déterminée par analyse des courbes de récession. Ces
dernières sont reportées sur un graphique semi-logarithmique log(Q) = f(t). Trois phases sont
alors identifiées (figure 37) : la première correspond à la décrue, la seconde est une droite
correspondant aux écoulements retardés et la dernière correspond aux écoulements lents.
L’épisode finit à la rupture entre la pente des écoulements retardés et celle des écoulements
lents.
Figure 37 : Utilisation de la récession log(Q) = f(t) de la crue d’octobre 2008 pour
déterminer la date de fin de l’épisode (tfin) ainsi que le débit de début des écoulements
retardés (Q0) et la pente de la droite des écoulements retardés.
1,00
10,00
100,00
0 50 100 150 200 250
temps (h)
log
(Q)
temps du
pic de crue
tfin
Ecoulements
retardés
Ecoulements
lents
Décrue
Q0
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 104 -
2.2. Contrôle de la qualité des pluies radar
Comme évoqué au chapitre 1, la mesure de pluie radar est soumise à de nombreuses
incertitudes. Afin de contrôler la qualité des pluies radar disponibles sur l’hydrosystème du
Lez, des régressions linéaires ont été établies entre les données de pluies au sol et les pixels
radar correspondants. La valeur de pluie radar utilisée correspond à la moyenne entre le pixel
central et ses huit voisins. Pour contrôler la valeur des cumuls de pluie radar, une régression
linéaire est établie entre les cumuls de pluie des 20 pluviomètres disponibles et les 20 pixels
radar correspondants. Un coefficient de détermination Re2 est alors calculé. Pour contrôler les
intensités de pluie radar, les chroniques horaires des pluviographes en fonctionnement au
cours de l’épisode sont corrélées à celles des pixels radar correspondants et un coefficient de
détermination Rh2 est obtenu pour chaque pluviographe en fonctionnement. Un coefficient de
détermination moyen Rh,moy2 est ensuite calculé pour chaque épisode. Ainsi, Re
2 et Rh,moy
2
permettent d’évaluer la qualité de la donnée radar en prenant la pluie au sol comme donnée de
référence.
Mis à part en 2002, on s’aperçoit que les coefficients Re2 et Rh,moy
2 sont supérieurs à
0.7 pour les épisodes de début d’automne (septembre 2000, septembre 2003, septembre 2005,
octobre 2008 et novembre 2008). Pour les autres épisodes, au moins un des deux coefficients
de détermination est inférieur à 0.5 (tableau 8). Ces résultats montrent une saisonnalité dans la
qualité des pluies radar : les données de début d’automne sont de meilleure qualité que celles
de fin d’automne. Ceci s’explique par le fait qu’en fin d’automne, la faible extension verticale
du nuage et la faible altitude de l’isotherme 0°C rendent le profil de réflectivité très
hétérogène et détériorent ainsi la qualité de la mesure du radar qui est situé à une distance
moyenne de 60 km par rapport à l’hydrosystème.
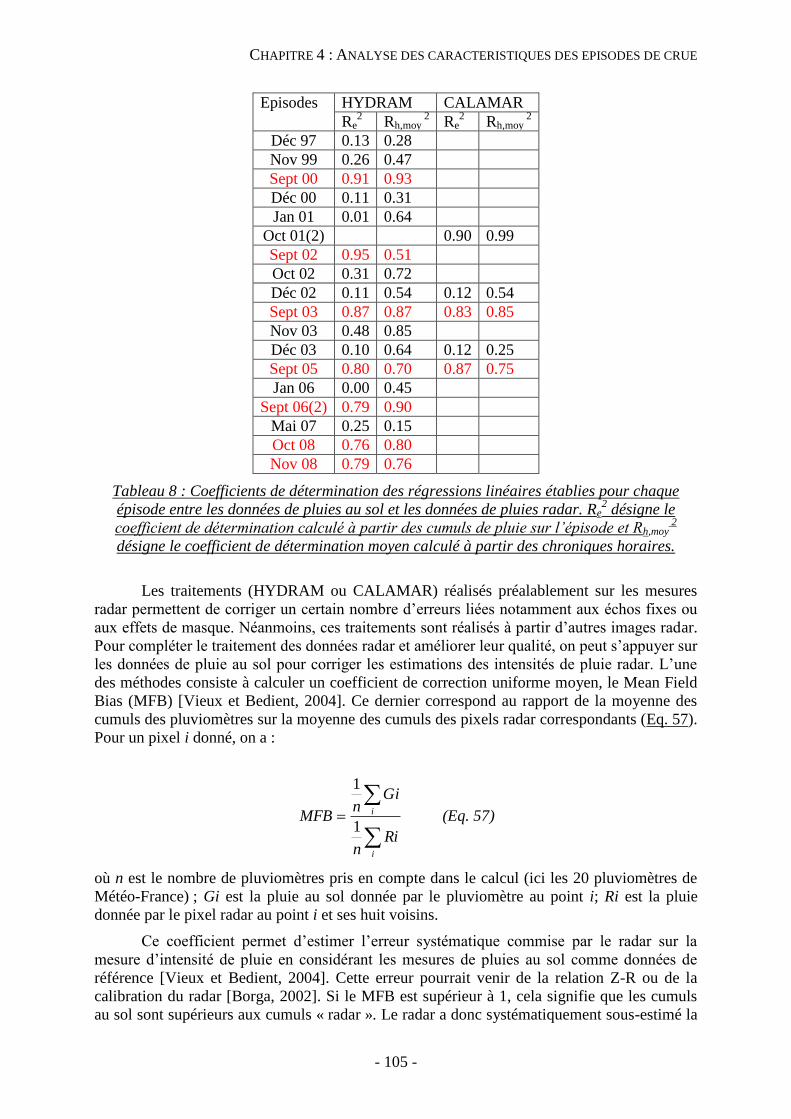
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 105 -
Episodes HYDRAM CALAMAR
Re2 Rh,moy
2 Re
2 Rh,moy
2
Déc 97 0.13 0.28
Nov 99 0.26 0.47
Sept 00 0.91 0.93
Déc 00 0.11 0.31
Jan 01 0.01 0.64
Oct 01(2) 0.90 0.99
Sept 02 0.95 0.51
Oct 02 0.31 0.72
Déc 02 0.11 0.54 0.12 0.54
Sept 03 0.87 0.87 0.83 0.85
Nov 03 0.48 0.85
Déc 03 0.10 0.64 0.12 0.25
Sept 05 0.80 0.70 0.87 0.75
Jan 06 0.00 0.45
Sept 06(2) 0.79 0.90
Mai 07 0.25 0.15
Oct 08 0.76 0.80
Nov 08 0.79 0.76
Tableau 8 : Coefficients de détermination des régressions linéaires établies pour chaque
épisode entre les données de pluies au sol et les données de pluies radar. Re2 désigne le
coefficient de détermination calculé à partir des cumuls de pluie sur l’épisode et Rh,moy 2
désigne le coefficient de détermination moyen calculé à partir des chroniques horaires.
Les traitements (HYDRAM ou CALAMAR) réalisés préalablement sur les mesures
radar permettent de corriger un certain nombre d’erreurs liées notamment aux échos fixes ou
aux effets de masque. Néanmoins, ces traitements sont réalisés à partir d’autres images radar.
Pour compléter le traitement des données radar et améliorer leur qualité, on peut s’appuyer sur
les données de pluie au sol pour corriger les estimations des intensités de pluie radar. L’une
des méthodes consiste à calculer un coefficient de correction uniforme moyen, le Mean Field
Bias (MFB) [Vieux et Bedient, 2004]. Ce dernier correspond au rapport de la moyenne des
cumuls des pluviomètres sur la moyenne des cumuls des pixels radar correspondants (Eq. 57).
Pour un pixel i donné, on a :
i
i
Rin
Gin
MFB1
1
(Eq. 57)
où n est le nombre de pluviomètres pris en compte dans le calcul (ici les 20 pluviomètres de
Météo-France) ; Gi est la pluie au sol donnée par le pluviomètre au point i; Ri est la pluie
donnée par le pixel radar au point i et ses huit voisins.
Ce coefficient permet d’estimer l’erreur systématique commise par le radar sur la
mesure d’intensité de pluie en considérant les mesures de pluies au sol comme données de
référence [Vieux et Bedient, 2004]. Cette erreur pourrait venir de la relation Z-R ou de la
calibration du radar [Borga, 2002]. Si le MFB est supérieur à 1, cela signifie que les cumuls
au sol sont supérieurs aux cumuls « radar ». Le radar a donc systématiquement sous-estimé la
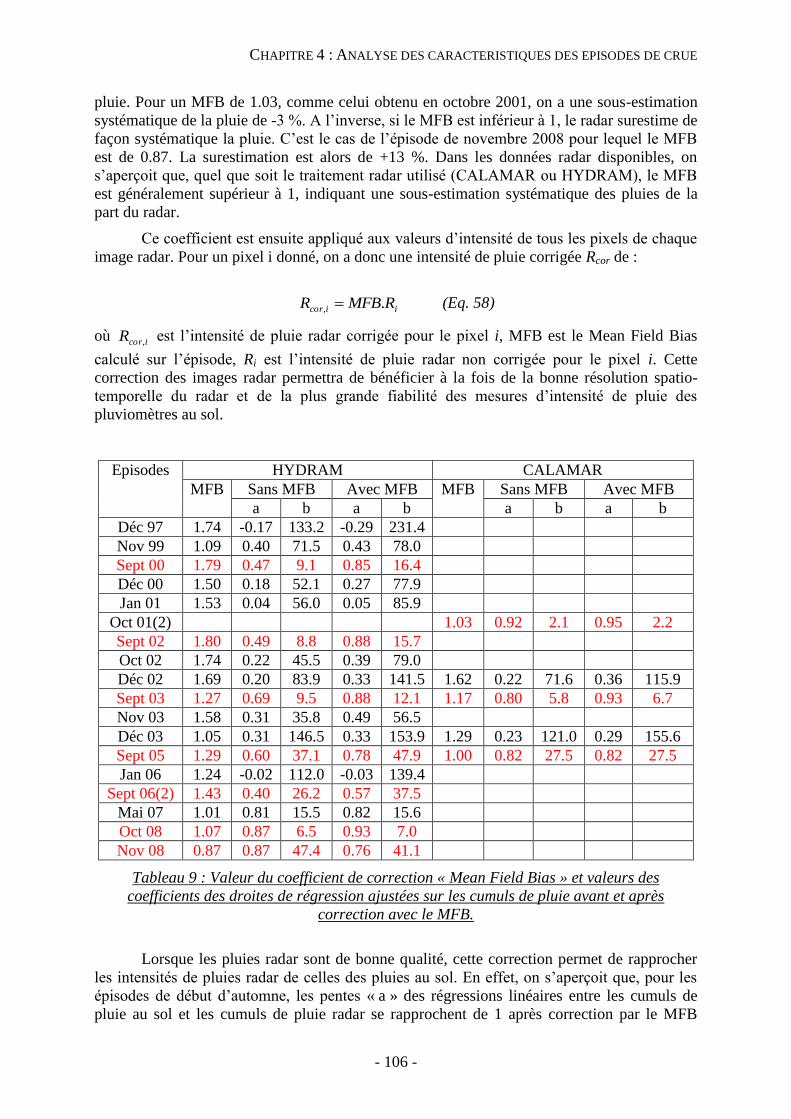
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 106 -
pluie. Pour un MFB de 1.03, comme celui obtenu en octobre 2001, on a une sous-estimation
systématique de la pluie de -3 %. A l’inverse, si le MFB est inférieur à 1, le radar surestime de
façon systématique la pluie. C’est le cas de l’épisode de novembre 2008 pour lequel le MFB
est de 0.87. La surestimation est alors de +13 %. Dans les données radar disponibles, on
s’aperçoit que, quel que soit le traitement radar utilisé (CALAMAR ou HYDRAM), le MFB
est généralement supérieur à 1, indiquant une sous-estimation systématique des pluies de la
part du radar.
Ce coefficient est ensuite appliqué aux valeurs d’intensité de tous les pixels de chaque
image radar. Pour un pixel i donné, on a donc une intensité de pluie corrigée Rcor de :
iicor RMFBR ., (Eq. 58)
où icorR , est l’intensité de pluie radar corrigée pour le pixel i, MFB est le Mean Field Bias
calculé sur l’épisode, Ri est l’intensité de pluie radar non corrigée pour le pixel i. Cette
correction des images radar permettra de bénéficier à la fois de la bonne résolution spatio-
temporelle du radar et de la plus grande fiabilité des mesures d’intensité de pluie des
pluviomètres au sol.
Episodes HYDRAM CALAMAR
MFB Sans MFB Avec MFB MFB Sans MFB Avec MFB
a b a b a b a b
Déc 97 1.74 -0.17 133.2 -0.29 231.4
Nov 99 1.09 0.40 71.5 0.43 78.0
Sept 00 1.79 0.47 9.1 0.85 16.4
Déc 00 1.50 0.18 52.1 0.27 77.9
Jan 01 1.53 0.04 56.0 0.05 85.9
Oct 01(2) 1.03 0.92 2.1 0.95 2.2
Sept 02 1.80 0.49 8.8 0.88 15.7
Oct 02 1.74 0.22 45.5 0.39 79.0
Déc 02 1.69 0.20 83.9 0.33 141.5 1.62 0.22 71.6 0.36 115.9
Sept 03 1.27 0.69 9.5 0.88 12.1 1.17 0.80 5.8 0.93 6.7
Nov 03 1.58 0.31 35.8 0.49 56.5
Déc 03 1.05 0.31 146.5 0.33 153.9 1.29 0.23 121.0 0.29 155.6
Sept 05 1.29 0.60 37.1 0.78 47.9 1.00 0.82 27.5 0.82 27.5
Jan 06 1.24 -0.02 112.0 -0.03 139.4
Sept 06(2) 1.43 0.40 26.2 0.57 37.5
Mai 07 1.01 0.81 15.5 0.82 15.6
Oct 08 1.07 0.87 6.5 0.93 7.0
Nov 08 0.87 0.87 47.4 0.76 41.1
Tableau 9 : Valeur du coefficient de correction « Mean Field Bias » et valeurs des
coefficients des droites de régression ajustées sur les cumuls de pluie avant et après
correction avec le MFB.
Lorsque les pluies radar sont de bonne qualité, cette correction permet de rapprocher
les intensités de pluies radar de celles des pluies au sol. En effet, on s’aperçoit que, pour les
épisodes de début d’automne, les pentes « a » des régressions linéaires entre les cumuls de
pluie au sol et les cumuls de pluie radar se rapprochent de 1 après correction par le MFB
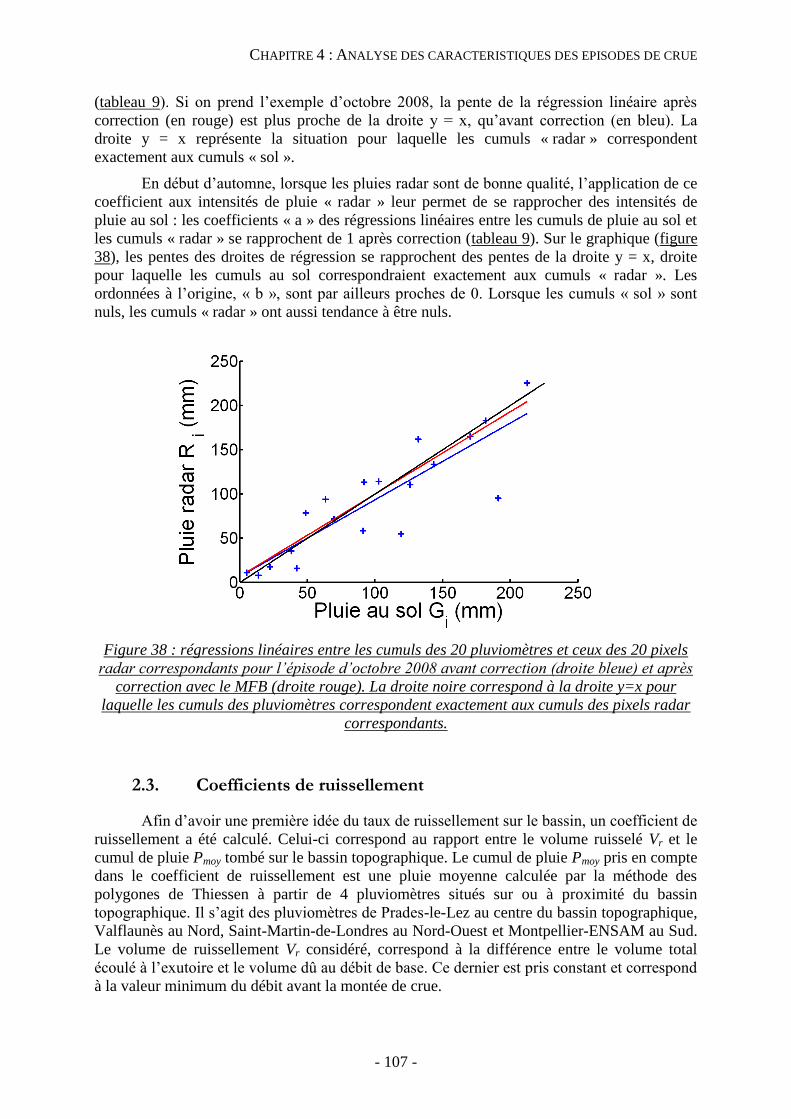
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 107 -
(tableau 9). Si on prend l’exemple d’octobre 2008, la pente de la régression linéaire après
correction (en rouge) est plus proche de la droite y = x, qu’avant correction (en bleu). La
droite y = x représente la situation pour laquelle les cumuls « radar » correspondent
exactement aux cumuls « sol ».
En début d’automne, lorsque les pluies radar sont de bonne qualité, l’application de ce
coefficient aux intensités de pluie « radar » leur permet de se rapprocher des intensités de
pluie au sol : les coefficients « a » des régressions linéaires entre les cumuls de pluie au sol et
les cumuls « radar » se rapprochent de 1 après correction (tableau 9). Sur le graphique (figure
38), les pentes des droites de régression se rapprochent des pentes de la droite y = x, droite
pour laquelle les cumuls au sol correspondraient exactement aux cumuls « radar ». Les
ordonnées à l’origine, « b », sont par ailleurs proches de 0. Lorsque les cumuls « sol » sont
nuls, les cumuls « radar » ont aussi tendance à être nuls.
Figure 38 : régressions linéaires entre les cumuls des 20 pluviomètres et ceux des 20 pixels
radar correspondants pour l’épisode d’octobre 2008 avant correction (droite bleue) et après
correction avec le MFB (droite rouge). La droite noire correspond à la droite y=x pour
laquelle les cumuls des pluviomètres correspondent exactement aux cumuls des pixels radar
correspondants.
2.3. Coefficients de ruissellement
Afin d’avoir une première idée du taux de ruissellement sur le bassin, un coefficient de
ruissellement a été calculé. Celui-ci correspond au rapport entre le volume ruisselé Vr et le
cumul de pluie Pmoy tombé sur le bassin topographique. Le cumul de pluie Pmoy pris en compte
dans le coefficient de ruissellement est une pluie moyenne calculée par la méthode des
polygones de Thiessen à partir de 4 pluviomètres situés sur ou à proximité du bassin
topographique. Il s’agit des pluviomètres de Prades-le-Lez au centre du bassin topographique,
Valflaunès au Nord, Saint-Martin-de-Londres au Nord-Ouest et Montpellier-ENSAM au Sud.
Le volume de ruissellement Vr considéré, correspond à la différence entre le volume total
écoulé à l’exutoire et le volume dû au débit de base. Ce dernier est pris constant et correspond
à la valeur minimum du débit avant la montée de crue.

CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 108 -
La valeur du coefficient de ruissellement donne un premier aperçu du comportement
de l’hydrosystème du Lez à Lavalette. Selon les épisodes, sa valeur varie entre 0.06 et 1.21 ce
qui suggère un comportement de l’hydrosystème très différent d’un épisode à l’autre.
L’échantillon de crues semble présenter une saisonnalité relativement marquée. Cette
saisonnalité est déjà mise en évidence par Drogue (1964) sur plusieurs sources du système
karstique des garrigues nord montpelliéraines et s’expliquerait par l’état hydrique des sols et
des aquifères. En effet, dans le cas du Lez, les crues survenant après un étiage prolongé (en
août, septembre ou parfois octobre) présentent un coefficient de ruissellement moyen de 0.3
(tableau 10 : épisodes en rouge). Les crues survenant après les premières pluies de l’automne
(octobre à janvier) présentent des coefficients de ruissellement beaucoup plus élevés avec une
valeur moyenne de 0.8 (tableau 10 : épisodes en noir et bleu). Certains présentent même un
coefficient de ruissellement supérieur à 1 (tableau 10 : épisodes en bleu). Une telle valeur
signifie qu’il aurait ruisselé plus d’eau sur le bassin topographique que ce qu’il a plu. Cette
« anomalie » peut être due à des erreurs de mesure : erreur sur l’estimation de la pluie
réellement tombée sur le bassin topographique ou erreur sur l’estimation des débits donc du
volume écoulé à l’exutoire. Si les volumes ruisselés et précipités sont corrects, alors un
coefficient de ruissellement supérieur à 1 indique un apport extérieur au bassin
topographique. Dans ce cas, une contribution des écoulements souterrains paraît envisageable,
en considérant que la totalité du bassin hydrogéologique est estimée à 380 km2. C’est ce que
suggèrent Roesch et Jourde (2006).
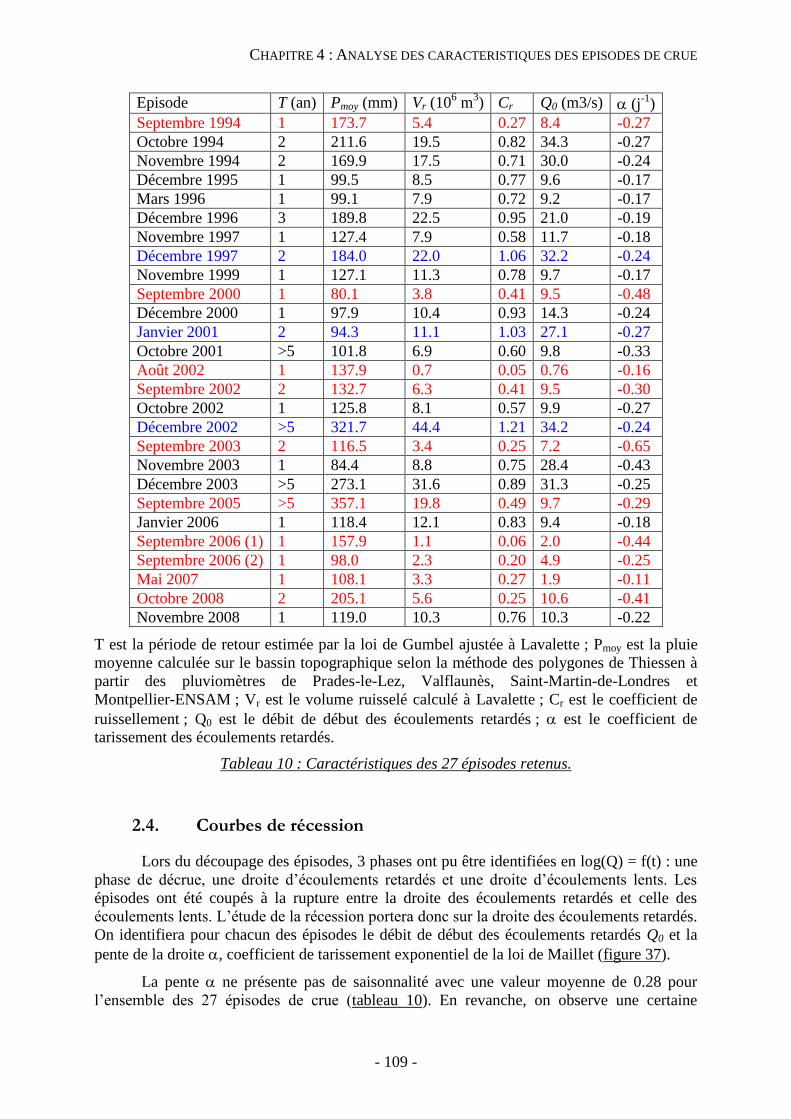
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 109 -
Episode T (an) Pmoy (mm) Vr (106 m
3) Cr Q0 (m3/s) (j
-1)
Septembre 1994 1 173.7 5.4 0.27 8.4 -0.27
Octobre 1994 2 211.6 19.5 0.82 34.3 -0.27
Novembre 1994 2 169.9 17.5 0.71 30.0 -0.24
Décembre 1995 1 99.5 8.5 0.77 9.6 -0.17
Mars 1996 1 99.1 7.9 0.72 9.2 -0.17
Décembre 1996 3 189.8 22.5 0.95 21.0 -0.19
Novembre 1997 1 127.4 7.9 0.58 11.7 -0.18
Décembre 1997 2 184.0 22.0 1.06 32.2 -0.24
Novembre 1999 1 127.1 11.3 0.78 9.7 -0.17
Septembre 2000 1 80.1 3.8 0.41 9.5 -0.48
Décembre 2000 1 97.9 10.4 0.93 14.3 -0.24
Janvier 2001 2 94.3 11.1 1.03 27.1 -0.27
Octobre 2001 >5 101.8 6.9 0.60 9.8 -0.33
Août 2002 1 137.9 0.7 0.05 0.76 -0.16
Septembre 2002 2 132.7 6.3 0.41 9.5 -0.30
Octobre 2002 1 125.8 8.1 0.57 9.9 -0.27
Décembre 2002 >5 321.7 44.4 1.21 34.2 -0.24
Septembre 2003 2 116.5 3.4 0.25 7.2 -0.65
Novembre 2003 1 84.4 8.8 0.75 28.4 -0.43
Décembre 2003 >5 273.1 31.6 0.89 31.3 -0.25
Septembre 2005 >5 357.1 19.8 0.49 9.7 -0.29
Janvier 2006 1 118.4 12.1 0.83 9.4 -0.18
Septembre 2006 (1) 1 157.9 1.1 0.06 2.0 -0.44
Septembre 2006 (2) 1 98.0 2.3 0.20 4.9 -0.25
Mai 2007 1 108.1 3.3 0.27 1.9 -0.11
Octobre 2008 2 205.1 5.6 0.25 10.6 -0.41
Novembre 2008 1 119.0 10.3 0.76 10.3 -0.22
T est la période de retour estimée par la loi de Gumbel ajustée à Lavalette ; Pmoy est la pluie
moyenne calculée sur le bassin topographique selon la méthode des polygones de Thiessen à
partir des pluviomètres de Prades-le-Lez, Valflaunès, Saint-Martin-de-Londres et
Montpellier-ENSAM ; Vr est le volume ruisselé calculé à Lavalette ; Cr est le coefficient de
ruissellement ; Q0 est le débit de début des écoulements retardés ; est le coefficient de
tarissement des écoulements retardés.
Tableau 10 : Caractéristiques des 27 épisodes retenus.
2.4. Courbes de récession
Lors du découpage des épisodes, 3 phases ont pu être identifiées en log(Q) = f(t) : une
phase de décrue, une droite d’écoulements retardés et une droite d’écoulements lents. Les
épisodes ont été coupés à la rupture entre la droite des écoulements retardés et celle des
écoulements lents. L’étude de la récession portera donc sur la droite des écoulements retardés.
On identifiera pour chacun des épisodes le débit de début des écoulements retardés Q0 et la
pente de la droite , coefficient de tarissement exponentiel de la loi de Maillet (figure 37).
La pente ne présente pas de saisonnalité avec une valeur moyenne de 0.28 pour
l’ensemble des 27 épisodes de crue (tableau 10). En revanche, on observe une certaine

CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 110 -
saisonnalité dans le soutien des écoulements retardés. En effet, la valeur moyenne du débit de
début des écoulements retardés est plus faible pour les épisodes survenant après un étiage
prolongé (tableau 10 : épisodes en rouge Q0moy = 6.5 m3/s) que pour les épisodes survenant
après les premières pluies de l’automne (tableau 10 : épisodes en noir et bleu Q0moy = 19.6
m3/s). Les écoulements retardés des épisodes survenant après un étiage prolongé sont donc
moins soutenus que ceux survenant après les premières pluies de l’automne.
2.5. Périodes de retour
Une loi de Gumbel a été ajustée par la DIREN à la chronique de débit de la station de
Lavalette. Sa fonction de répartition F(Qp) (Eq. 59) permet d’estimer la période de retour T
(Eq.60) des épisodes de crues sélectionnés à partir du débit de pointe Qp.
85
)9.76(expexp)F(
QpQp (Eq. 59)
où Qp est le débit de pointe, s = 85 est la valeur du gradex (paramètre d'échelle) et x0 = 76.9
est la valeur du paramètre de position.
)F(1
1
QpT
(Eq. 60)
où T est la période de retour, Qp le débit de pointe de l’épisode et F(Qp) est la fonction de
répartition des débits de pointe Qp.
Avec cette loi, le débit centennal du Lez à Lavalette est estimé à 500 m3/s. Cette valeur
a fait débat et a été remise en question lors de la conférence scientifique sur le débit centennal
du Lez à Montpellier [CETE Méditerranée, 2007], où le débit centennal du Lez à Lavalette a
été réévalué à 700 m3/s (à plus ou moins 150 m
3/s). Cette loi va néanmoins nous permettre
d’évaluer l’importance des épisodes de crues sélectionnés. L’échantillon des 27 crues
sélectionnées couvre ainsi une large gamme de débits de pointe. Parmi ces crues, dix d’entre
elles présentent un débit de pointe d’environ 110 m3/s correspondant à une période de retour
de 2 ans et quatre présentent un débit de pointe supérieur à 200 m3/s correspondant à une
période de retour supérieure ou égale à 5 ans (tableau 10).
3. Les indicateurs de l’état hydrique de l’hydrosystème
Les indicateurs de l’état hydrique de l’hydrosystème disponibles permettent d’avoir
une idée à la fois de la saturation des formations superficielles présentes sur le bassin
topographique (humidité SIM) et de l’état de remplissage de l’aquifère (piézométrie). Leur
prise en compte dans la modélisation hydrologique est essentielle pour une bonne
représentation des débits de crue et explique en partie la réponse du bassin lors des crues.
3.1. Les indices d’humidité SIM
La chaîne SAFRAN-ISBA-MODCOU (SIM) est un modèle hydrométéorologique
développé par le Centre National de Recherche Météorologique (CNRM) à Météo-France.
Validée sur trois grands bassins versants français (le Rhône [Etchevers, 2000], l’Adour-
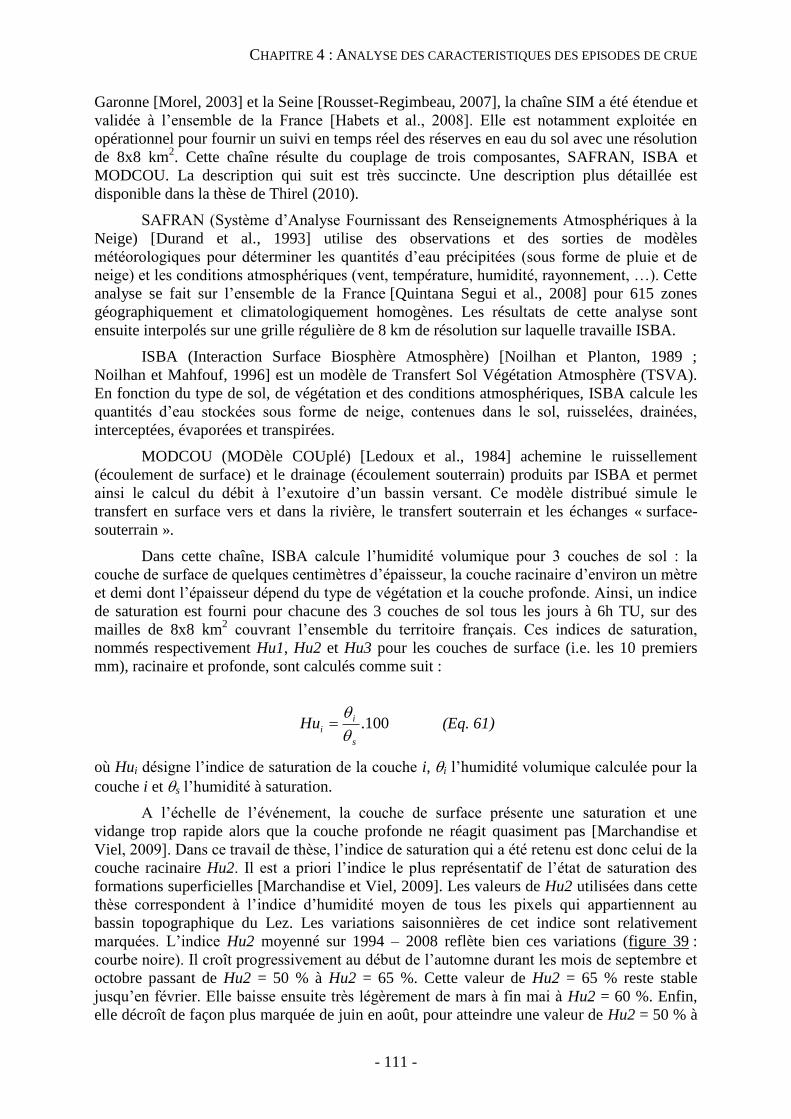
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 111 -
Garonne [Morel, 2003] et la Seine [Rousset-Regimbeau, 2007], la chaîne SIM a été étendue et
validée à l’ensemble de la France [Habets et al., 2008]. Elle est notamment exploitée en
opérationnel pour fournir un suivi en temps réel des réserves en eau du sol avec une résolution
de 8x8 km2. Cette chaîne résulte du couplage de trois composantes, SAFRAN, ISBA et
MODCOU. La description qui suit est très succincte. Une description plus détaillée est
disponible dans la thèse de Thirel (2010).
SAFRAN (Système d’Analyse Fournissant des Renseignements Atmosphériques à la
Neige) [Durand et al., 1993] utilise des observations et des sorties de modèles
météorologiques pour déterminer les quantités d’eau précipitées (sous forme de pluie et de
neige) et les conditions atmosphériques (vent, température, humidité, rayonnement, …). Cette
analyse se fait sur l’ensemble de la France [Quintana Segui et al., 2008] pour 615 zones
géographiquement et climatologiquement homogènes. Les résultats de cette analyse sont
ensuite interpolés sur une grille régulière de 8 km de résolution sur laquelle travaille ISBA.
ISBA (Interaction Surface Biosphère Atmosphère) [Noilhan et Planton, 1989 ;
Noilhan et Mahfouf, 1996] est un modèle de Transfert Sol Végétation Atmosphère (TSVA).
En fonction du type de sol, de végétation et des conditions atmosphériques, ISBA calcule les
quantités d’eau stockées sous forme de neige, contenues dans le sol, ruisselées, drainées,
interceptées, évaporées et transpirées.
MODCOU (MODèle COUplé) [Ledoux et al., 1984] achemine le ruissellement
(écoulement de surface) et le drainage (écoulement souterrain) produits par ISBA et permet
ainsi le calcul du débit à l’exutoire d’un bassin versant. Ce modèle distribué simule le
transfert en surface vers et dans la rivière, le transfert souterrain et les échanges « surface-
souterrain ».
Dans cette chaîne, ISBA calcule l’humidité volumique pour 3 couches de sol : la
couche de surface de quelques centimètres d’épaisseur, la couche racinaire d’environ un mètre
et demi dont l’épaisseur dépend du type de végétation et la couche profonde. Ainsi, un indice
de saturation est fourni pour chacune des 3 couches de sol tous les jours à 6h TU, sur des
mailles de 8x8 km2 couvrant l’ensemble du territoire français. Ces indices de saturation,
nommés respectivement Hu1, Hu2 et Hu3 pour les couches de surface (i.e. les 10 premiers
mm), racinaire et profonde, sont calculés comme suit :
100.s
i
iHu
(Eq. 61)
où Hui désigne l’indice de saturation de la couche i, i l’humidité volumique calculée pour la
couche i et s l’humidité à saturation.
A l’échelle de l’événement, la couche de surface présente une saturation et une
vidange trop rapide alors que la couche profonde ne réagit quasiment pas [Marchandise et
Viel, 2009]. Dans ce travail de thèse, l’indice de saturation qui a été retenu est donc celui de la
couche racinaire Hu2. Il est a priori l’indice le plus représentatif de l’état de saturation des
formations superficielles [Marchandise et Viel, 2009]. Les valeurs de Hu2 utilisées dans cette
thèse correspondent à l’indice d’humidité moyen de tous les pixels qui appartiennent au
bassin topographique du Lez. Les variations saisonnières de cet indice sont relativement
marquées. L’indice Hu2 moyenné sur 1994 – 2008 reflète bien ces variations (figure 39 :
courbe noire). Il croît progressivement au début de l’automne durant les mois de septembre et
octobre passant de Hu2 = 50 % à Hu2 = 65 %. Cette valeur de Hu2 = 65 % reste stable
jusqu’en février. Elle baisse ensuite très légèrement de mars à fin mai à Hu2 = 60 %. Enfin,
elle décroît de façon plus marquée de juin en août, pour atteindre une valeur de Hu2 = 50 % à
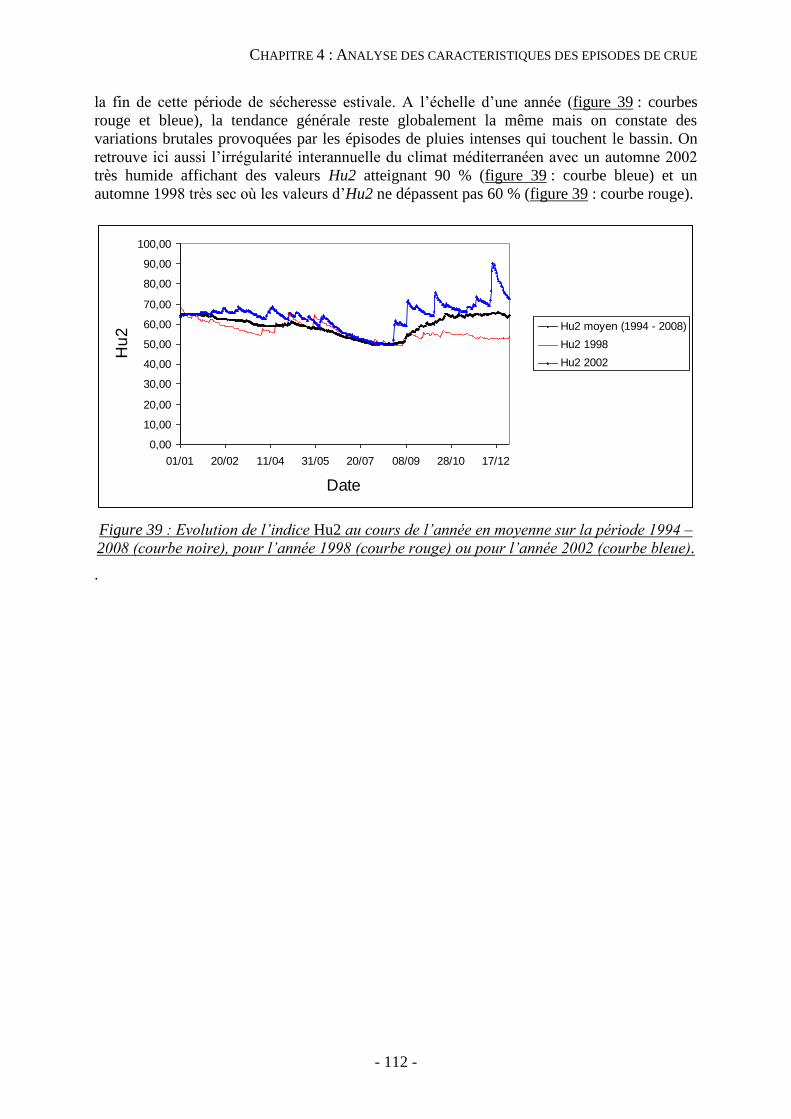
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 112 -
la fin de cette période de sécheresse estivale. A l’échelle d’une année (figure 39 : courbes
rouge et bleue), la tendance générale reste globalement la même mais on constate des
variations brutales provoquées par les épisodes de pluies intenses qui touchent le bassin. On
retrouve ici aussi l’irrégularité interannuelle du climat méditerranéen avec un automne 2002
très humide affichant des valeurs Hu2 atteignant 90 % (figure 39 : courbe bleue) et un
automne 1998 très sec où les valeurs d’Hu2 ne dépassent pas 60 % (figure 39 : courbe rouge).
Figure 39 : Evolution de l’indice Hu2 au cours de l’année en moyenne sur la période 1994 –
2008 (courbe noire), pour l’année 1998 (courbe rouge) ou pour l’année 2002 (courbe bleue).
.
0,00
10,00
20,00
30,00
40,00
50,00
60,00
70,00
80,00
90,00
100,00
01/01 20/02 11/04 31/05 20/07 08/09 28/10 17/12
Date
Hu
2 Hu2 moyen (1994 - 2008)
Hu2 1998
Hu2 2002
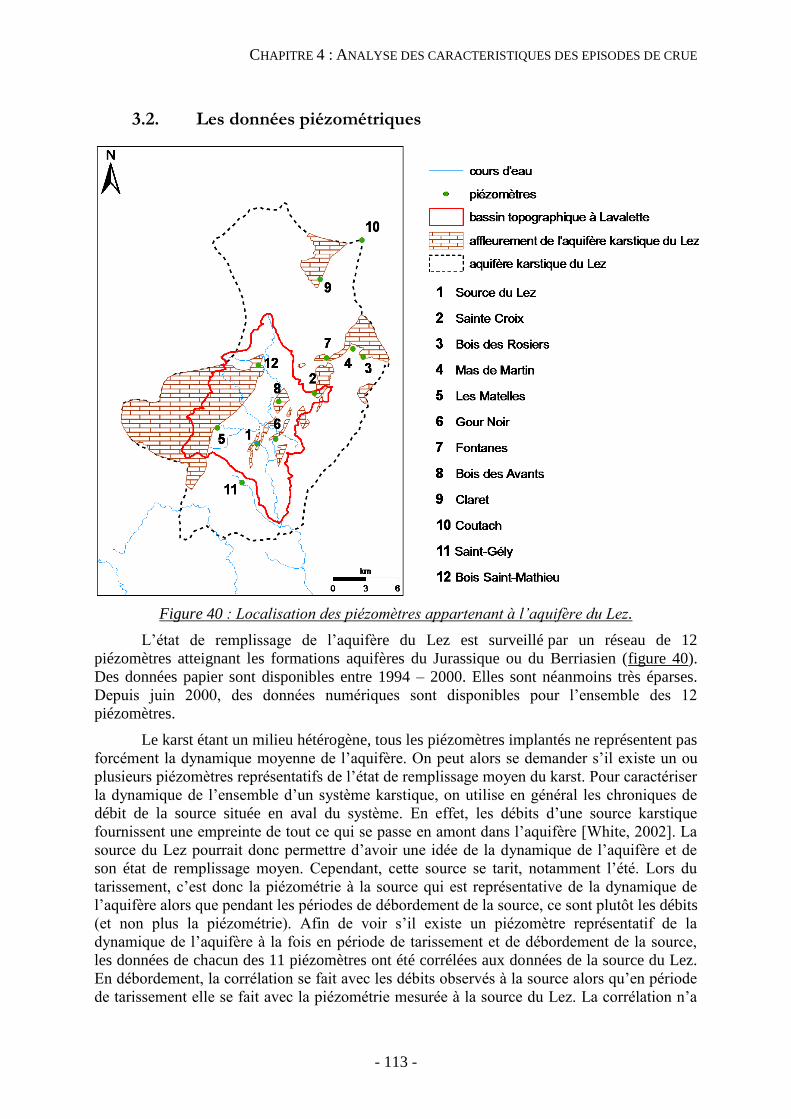
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 113 -
3.2. Les données piézométriques
Figure 40 : Localisation des piézomètres appartenant à l’aquifère du Lez.
L’état de remplissage de l’aquifère du Lez est surveillé par un réseau de 12
piézomètres atteignant les formations aquifères du Jurassique ou du Berriasien (figure 40).
Des données papier sont disponibles entre 1994 – 2000. Elles sont néanmoins très éparses.
Depuis juin 2000, des données numériques sont disponibles pour l’ensemble des 12
piézomètres.
Le karst étant un milieu hétérogène, tous les piézomètres implantés ne représentent pas
forcément la dynamique moyenne de l’aquifère. On peut alors se demander s’il existe un ou
plusieurs piézomètres représentatifs de l’état de remplissage moyen du karst. Pour caractériser
la dynamique de l’ensemble d’un système karstique, on utilise en général les chroniques de
débit de la source située en aval du système. En effet, les débits d’une source karstique
fournissent une empreinte de tout ce qui se passe en amont dans l’aquifère [White, 2002]. La
source du Lez pourrait donc permettre d’avoir une idée de la dynamique de l’aquifère et de
son état de remplissage moyen. Cependant, cette source se tarit, notamment l’été. Lors du
tarissement, c’est donc la piézométrie à la source qui est représentative de la dynamique de
l’aquifère alors que pendant les périodes de débordement de la source, ce sont plutôt les débits
(et non plus la piézométrie). Afin de voir s’il existe un piézomètre représentatif de la
dynamique de l’aquifère à la fois en période de tarissement et de débordement de la source,
les données de chacun des 11 piézomètres ont été corrélées aux données de la source du Lez.
En débordement, la corrélation se fait avec les débits observés à la source alors qu’en période
de tarissement elle se fait avec la piézométrie mesurée à la source du Lez. La corrélation n’a
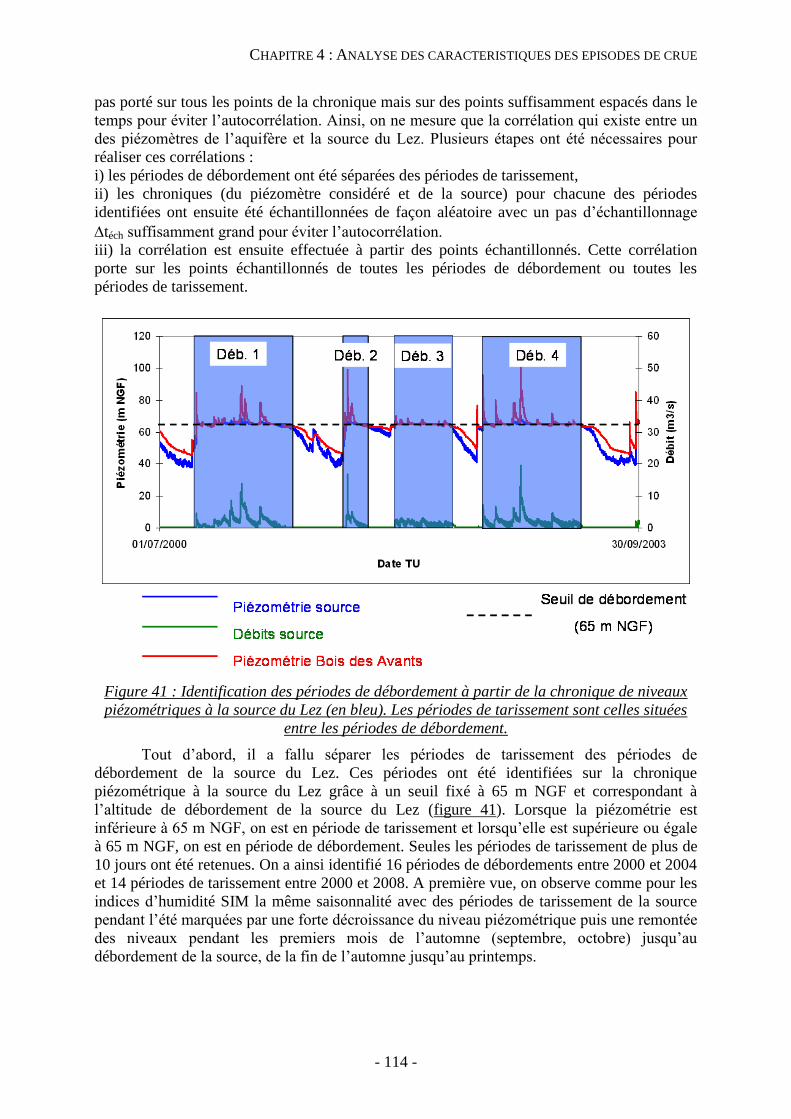
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 114 -
pas porté sur tous les points de la chronique mais sur des points suffisamment espacés dans le
temps pour éviter l’autocorrélation. Ainsi, on ne mesure que la corrélation qui existe entre un
des piézomètres de l’aquifère et la source du Lez. Plusieurs étapes ont été nécessaires pour
réaliser ces corrélations :
i) les périodes de débordement ont été séparées des périodes de tarissement,
ii) les chroniques (du piézomètre considéré et de la source) pour chacune des périodes
identifiées ont ensuite été échantillonnées de façon aléatoire avec un pas d’échantillonnage
téch suffisamment grand pour éviter l’autocorrélation.
iii) la corrélation est ensuite effectuée à partir des points échantillonnés. Cette corrélation
porte sur les points échantillonnés de toutes les périodes de débordement ou toutes les
périodes de tarissement.
Figure 41 : Identification des périodes de débordement à partir de la chronique de niveaux
piézométriques à la source du Lez (en bleu). Les périodes de tarissement sont celles situées
entre les périodes de débordement.
Tout d’abord, il a fallu séparer les périodes de tarissement des périodes de
débordement de la source du Lez. Ces périodes ont été identifiées sur la chronique
piézométrique à la source du Lez grâce à un seuil fixé à 65 m NGF et correspondant à
l’altitude de débordement de la source du Lez (figure 41). Lorsque la piézométrie est
inférieure à 65 m NGF, on est en période de tarissement et lorsqu’elle est supérieure ou égale
à 65 m NGF, on est en période de débordement. Seules les périodes de tarissement de plus de
10 jours ont été retenues. On a ainsi identifié 16 périodes de débordements entre 2000 et 2004
et 14 périodes de tarissement entre 2000 et 2008. A première vue, on observe comme pour les
indices d’humidité SIM la même saisonnalité avec des périodes de tarissement de la source
pendant l’été marquées par une forte décroissance du niveau piézométrique puis une remontée
des niveaux pendant les premiers mois de l’automne (septembre, octobre) jusqu’au
débordement de la source, de la fin de l’automne jusqu’au printemps.
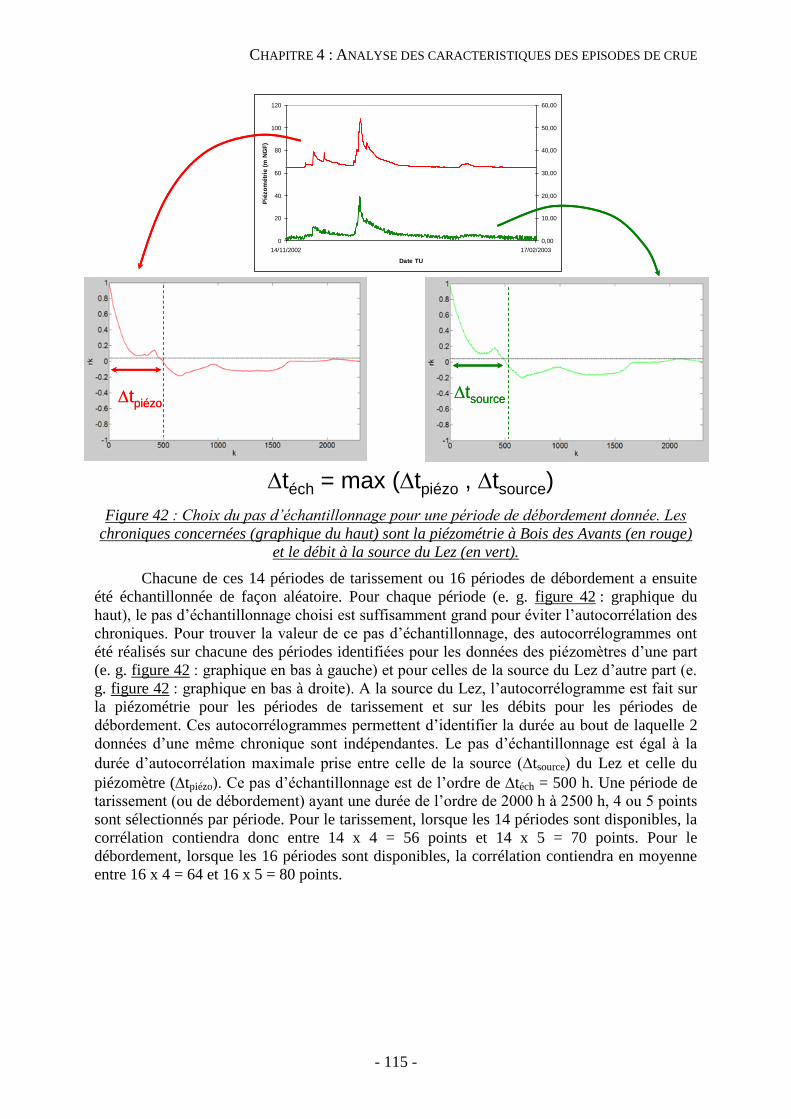
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 115 -
Figure 42 : Choix du pas d’échantillonnage pour une période de débordement donnée. Les
chroniques concernées (graphique du haut) sont la piézométrie à Bois des Avants (en rouge)
et le débit à la source du Lez (en vert).
Chacune de ces 14 périodes de tarissement ou 16 périodes de débordement a ensuite
été échantillonnée de façon aléatoire. Pour chaque période (e. g. figure 42 : graphique du
haut), le pas d’échantillonnage choisi est suffisamment grand pour éviter l’autocorrélation des
chroniques. Pour trouver la valeur de ce pas d’échantillonnage, des autocorrélogrammes ont
été réalisés sur chacune des périodes identifiées pour les données des piézomètres d’une part
(e. g. figure 42 : graphique en bas à gauche) et pour celles de la source du Lez d’autre part (e.
g. figure 42 : graphique en bas à droite). A la source du Lez, l’autocorrélogramme est fait sur
la piézométrie pour les périodes de tarissement et sur les débits pour les périodes de
débordement. Ces autocorrélogrammes permettent d’identifier la durée au bout de laquelle 2
données d’une même chronique sont indépendantes. Le pas d’échantillonnage est égal à la
durée d’autocorrélation maximale prise entre celle de la source (tsource) du Lez et celle du
piézomètre (tpiézo). Ce pas d’échantillonnage est de l’ordre de téch = 500 h. Une période de
tarissement (ou de débordement) ayant une durée de l’ordre de 2000 h à 2500 h, 4 ou 5 points
sont sélectionnés par période. Pour le tarissement, lorsque les 14 périodes sont disponibles, la
corrélation contiendra donc entre 14 x 4 = 56 points et 14 x 5 = 70 points. Pour le
débordement, lorsque les 16 périodes sont disponibles, la corrélation contiendra en moyenne
entre 16 x 4 = 64 et 16 x 5 = 80 points.
0
20
40
60
80
100
120
14/11/2002 17/02/2003
Date TUP
iézo
métr
ie (
m N
GF
)
0,00
10,00
20,00
30,00
40,00
50,00
60,00
téch = max (tpiézo , tsource)
tpiézotpiézotsourcetsource
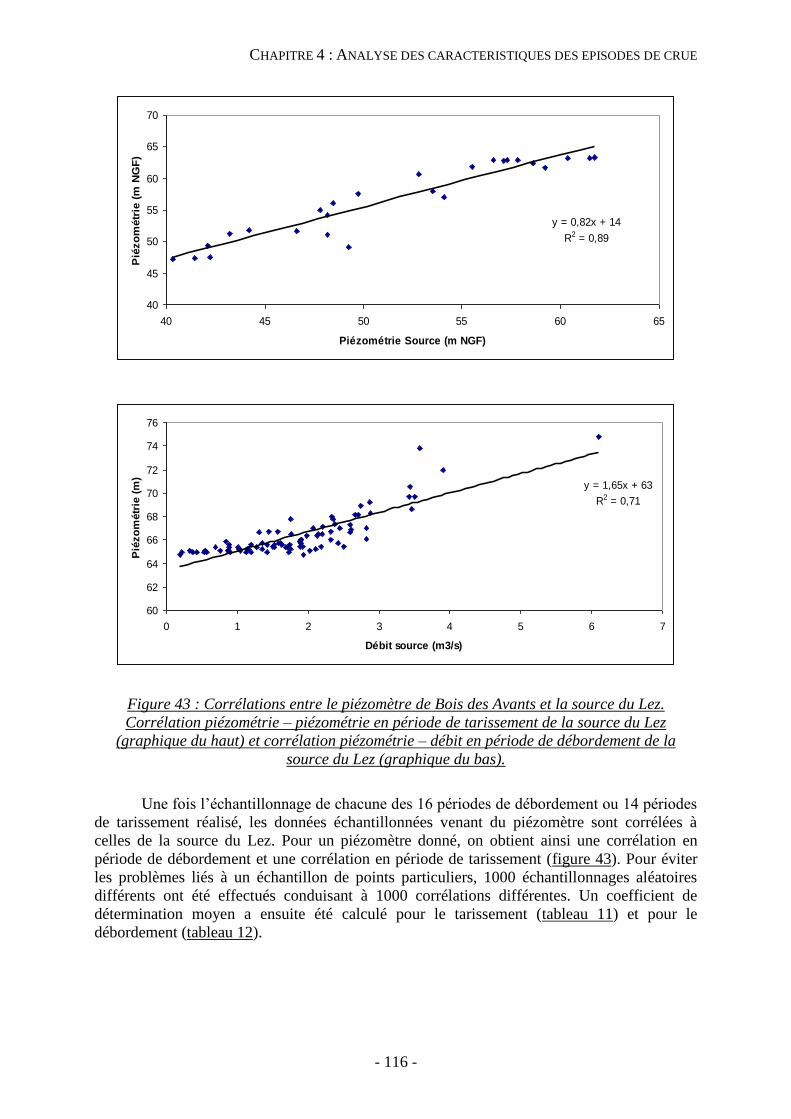
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 116 -
Figure 43 : Corrélations entre le piézomètre de Bois des Avants et la source du Lez.
Corrélation piézométrie – piézométrie en période de tarissement de la source du Lez
(graphique du haut) et corrélation piézométrie – débit en période de débordement de la
source du Lez (graphique du bas).
Une fois l’échantillonnage de chacune des 16 périodes de débordement ou 14 périodes
de tarissement réalisé, les données échantillonnées venant du piézomètre sont corrélées à
celles de la source du Lez. Pour un piézomètre donné, on obtient ainsi une corrélation en
période de débordement et une corrélation en période de tarissement (figure 43). Pour éviter
les problèmes liés à un échantillon de points particuliers, 1000 échantillonnages aléatoires
différents ont été effectués conduisant à 1000 corrélations différentes. Un coefficient de
détermination moyen a ensuite été calculé pour le tarissement (tableau 11) et pour le
débordement (tableau 12).
y = 0,82x + 14
R2 = 0,89
40
45
50
55
60
65
70
40 45 50 55 60 65
Piézométrie Source (m NGF)
Pié
zo
métr
ie (
m N
GF
)
y = 1,65x + 63
R2 = 0,71
60
62
64
66
68
70
72
74
76
0 1 2 3 4 5 6 7
Débit source (m3/s)
Pié
zo
métr
ie (
m)
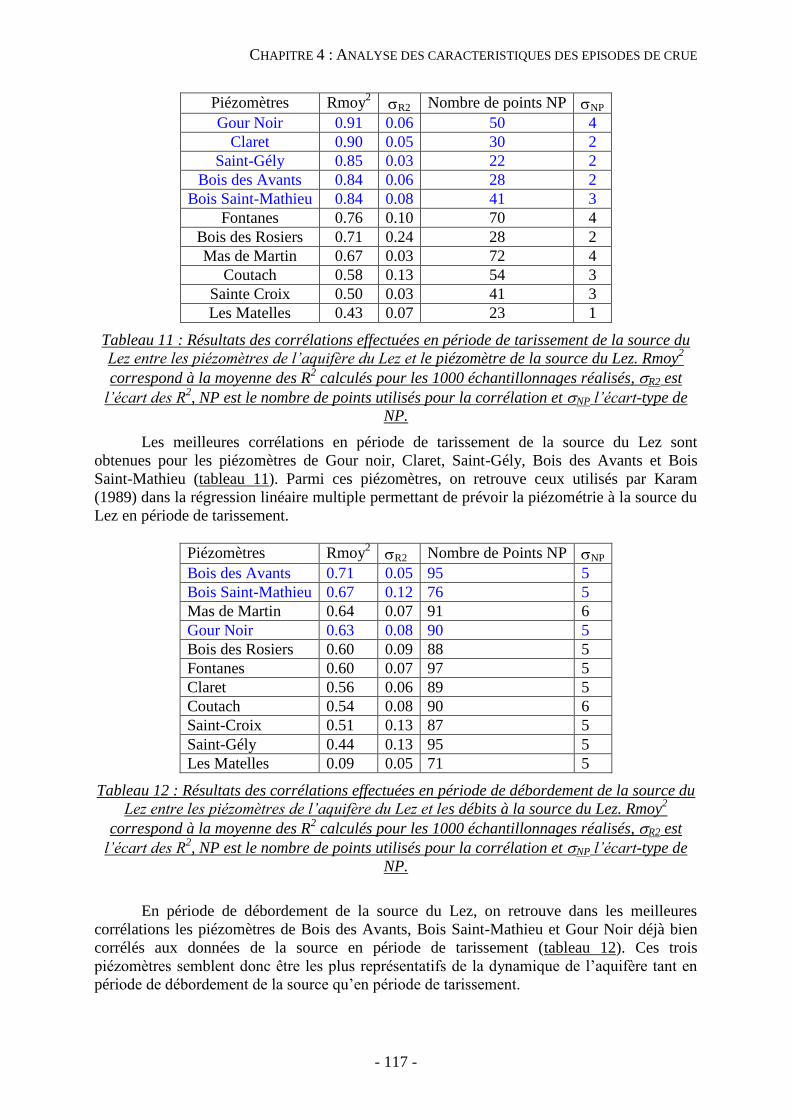
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 117 -
Piézomètres Rmoy2 R2 Nombre de points NP NP
Gour Noir 0.91 0.06 50 4
Claret 0.90 0.05 30 2
Saint-Gély 0.85 0.03 22 2
Bois des Avants 0.84 0.06 28 2
Bois Saint-Mathieu 0.84 0.08 41 3
Fontanes 0.76 0.10 70 4
Bois des Rosiers 0.71 0.24 28 2
Mas de Martin 0.67 0.03 72 4
Coutach 0.58 0.13 54 3
Sainte Croix 0.50 0.03 41 3
Les Matelles 0.43 0.07 23 1
Tableau 11 : Résultats des corrélations effectuées en période de tarissement de la source du
Lez entre les piézomètres de l’aquifère du Lez et le piézomètre de la source du Lez. Rmoy2
correspond à la moyenne des R2 calculés pour les 1000 échantillonnages réalisés, R2 est
l’écart des R2, NP est le nombre de points utilisés pour la corrélation et NP l’écart-type de
NP.
Les meilleures corrélations en période de tarissement de la source du Lez sont
obtenues pour les piézomètres de Gour noir, Claret, Saint-Gély, Bois des Avants et Bois
Saint-Mathieu (tableau 11). Parmi ces piézomètres, on retrouve ceux utilisés par Karam
(1989) dans la régression linéaire multiple permettant de prévoir la piézométrie à la source du
Lez en période de tarissement.
Piézomètres Rmoy2 R2 Nombre de Points NP NP
Bois des Avants 0.71 0.05 95 5
Bois Saint-Mathieu 0.67 0.12 76 5
Mas de Martin 0.64 0.07 91 6
Gour Noir 0.63 0.08 90 5
Bois des Rosiers 0.60 0.09 88 5
Fontanes 0.60 0.07 97 5
Claret 0.56 0.06 89 5
Coutach 0.54 0.08 90 6
Saint-Croix 0.51 0.13 87 5
Saint-Gély 0.44 0.13 95 5
Les Matelles 0.09 0.05 71 5
Tableau 12 : Résultats des corrélations effectuées en période de débordement de la source du
Lez entre les piézomètres de l’aquifère du Lez et les débits à la source du Lez. Rmoy2
correspond à la moyenne des R2 calculés pour les 1000 échantillonnages réalisés, R2 est
l’écart des R2, NP est le nombre de points utilisés pour la corrélation et NP l’écart-type de
NP.
En période de débordement de la source du Lez, on retrouve dans les meilleures
corrélations les piézomètres de Bois des Avants, Bois Saint-Mathieu et Gour Noir déjà bien
corrélés aux données de la source en période de tarissement (tableau 12). Ces trois
piézomètres semblent donc être les plus représentatifs de la dynamique de l’aquifère tant en
période de débordement de la source qu’en période de tarissement.
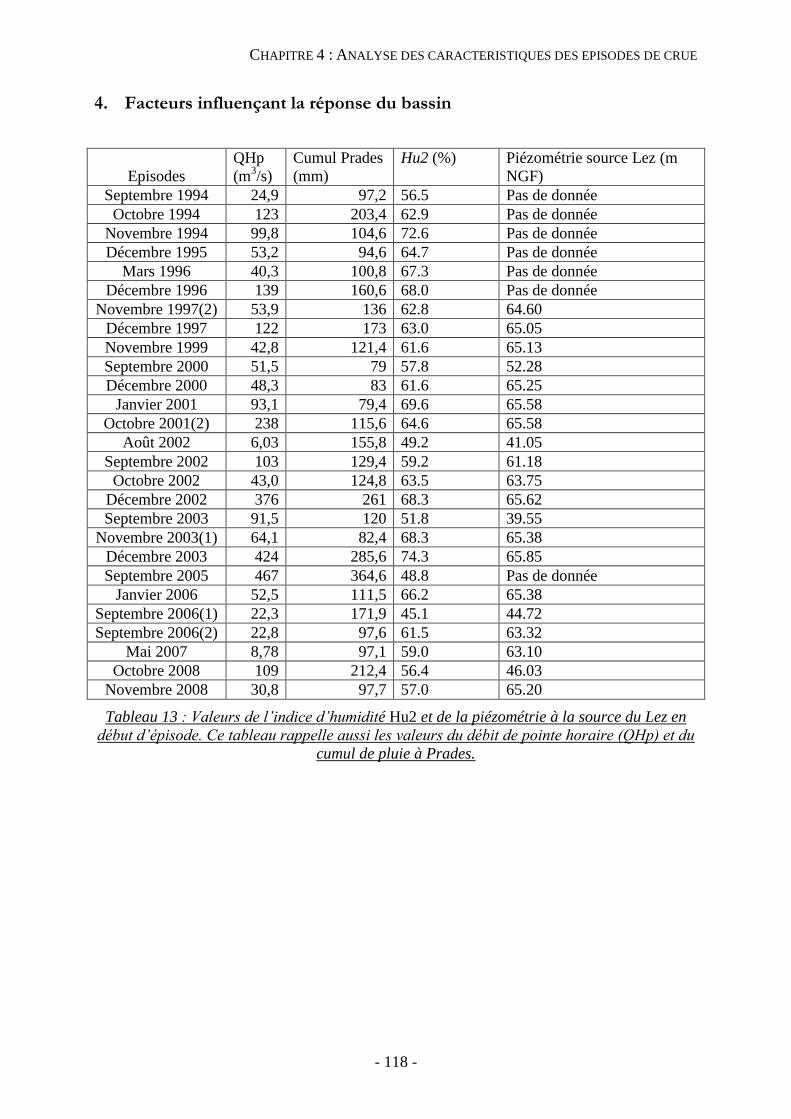
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 118 -
4. Facteurs influençant la réponse du bassin
Episodes
QHp
(m3/s)
Cumul Prades
(mm)
Hu2 (%) Piézométrie source Lez (m
NGF)
Septembre 1994 24,9 97,2 56.5 Pas de donnée
Octobre 1994 123 203,4 62.9 Pas de donnée
Novembre 1994 99,8 104,6 72.6 Pas de donnée
Décembre 1995 53,2 94,6 64.7 Pas de donnée
Mars 1996 40,3 100,8 67.3 Pas de donnée
Décembre 1996 139 160,6 68.0 Pas de donnée
Novembre 1997(2) 53,9 136 62.8 64.60
Décembre 1997 122 173 63.0 65.05
Novembre 1999 42,8 121,4 61.6 65.13
Septembre 2000 51,5 79 57.8 52.28
Décembre 2000 48,3 83 61.6 65.25
Janvier 2001 93,1 79,4 69.6 65.58
Octobre 2001(2) 238 115,6 64.6 65.58
Août 2002 6,03 155,8 49.2 41.05
Septembre 2002 103 129,4 59.2 61.18
Octobre 2002 43,0 124,8 63.5 63.75
Décembre 2002 376 261 68.3 65.62
Septembre 2003 91,5 120 51.8 39.55
Novembre 2003(1) 64,1 82,4 68.3 65.38
Décembre 2003 424 285,6 74.3 65.85
Septembre 2005 467 364,6 48.8 Pas de donnée
Janvier 2006 52,5 111,5 66.2 65.38
Septembre 2006(1) 22,3 171,9 45.1 44.72
Septembre 2006(2) 22,8 97,6 61.5 63.32
Mai 2007 8,78 97,1 59.0 63.10
Octobre 2008 109 212,4 56.4 46.03
Novembre 2008 30,8 97,7 57.0 65.20
Tableau 13 : Valeurs de l’indice d’humidité Hu2 et de la piézométrie à la source du Lez en
début d’épisode. Ce tableau rappelle aussi les valeurs du débit de pointe horaire (QHp) et du
cumul de pluie à Prades.
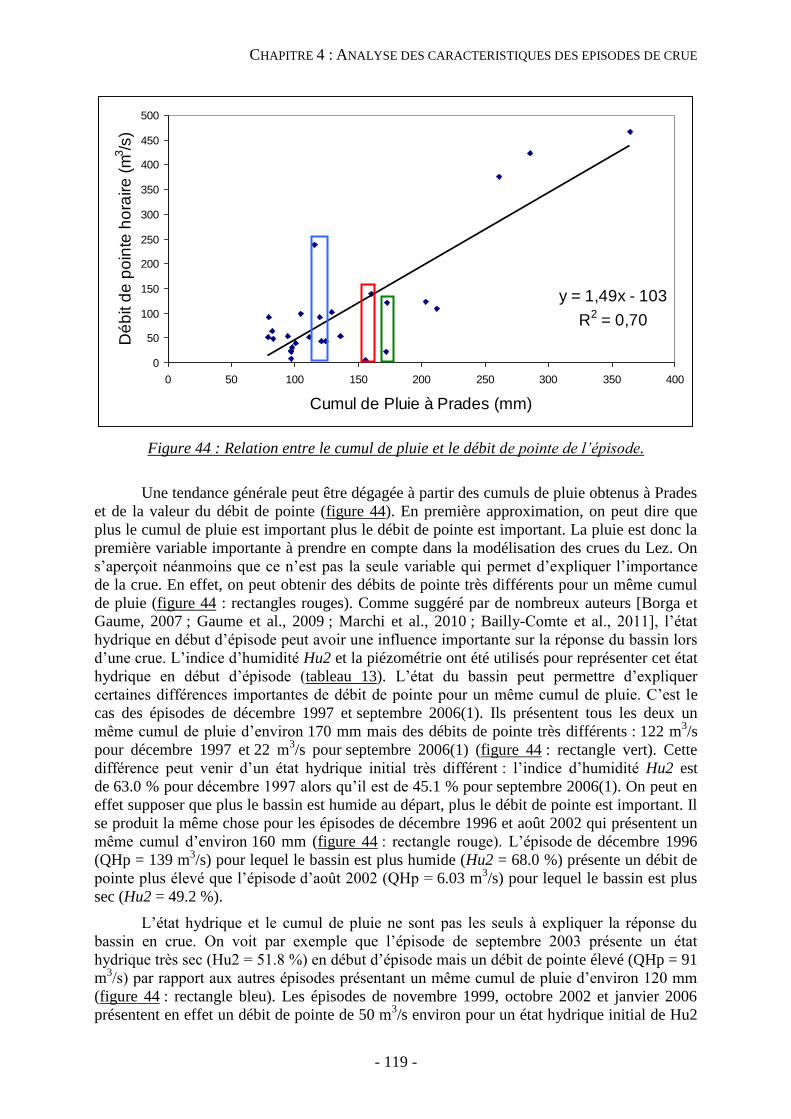
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 119 -
Figure 44 : Relation entre le cumul de pluie et le débit de pointe de l’épisode.
Une tendance générale peut être dégagée à partir des cumuls de pluie obtenus à Prades
et de la valeur du débit de pointe (figure 44). En première approximation, on peut dire que
plus le cumul de pluie est important plus le débit de pointe est important. La pluie est donc la
première variable importante à prendre en compte dans la modélisation des crues du Lez. On
s’aperçoit néanmoins que ce n’est pas la seule variable qui permet d’expliquer l’importance
de la crue. En effet, on peut obtenir des débits de pointe très différents pour un même cumul
de pluie (figure 44 : rectangles rouges). Comme suggéré par de nombreux auteurs [Borga et
Gaume, 2007 ; Gaume et al., 2009 ; Marchi et al., 2010 ; Bailly-Comte et al., 2011], l’état
hydrique en début d’épisode peut avoir une influence importante sur la réponse du bassin lors
d’une crue. L’indice d’humidité Hu2 et la piézométrie ont été utilisés pour représenter cet état
hydrique en début d’épisode (tableau 13). L’état du bassin peut permettre d’expliquer
certaines différences importantes de débit de pointe pour un même cumul de pluie. C’est le
cas des épisodes de décembre 1997 et septembre 2006(1). Ils présentent tous les deux un
même cumul de pluie d’environ 170 mm mais des débits de pointe très différents : 122 m3/s
pour décembre 1997 et 22 m3/s pour septembre 2006(1) (figure 44 : rectangle vert). Cette
différence peut venir d’un état hydrique initial très différent : l’indice d’humidité Hu2 est
de 63.0 % pour décembre 1997 alors qu’il est de 45.1 % pour septembre 2006(1). On peut en
effet supposer que plus le bassin est humide au départ, plus le débit de pointe est important. Il
se produit la même chose pour les épisodes de décembre 1996 et août 2002 qui présentent un
même cumul d’environ 160 mm (figure 44 : rectangle rouge). L’épisode de décembre 1996
(QHp = 139 m3/s) pour lequel le bassin est plus humide (Hu2 = 68.0 %) présente un débit de
pointe plus élevé que l’épisode d’août 2002 (QHp = 6.03 m3/s) pour lequel le bassin est plus
sec (Hu2 = 49.2 %).
L’état hydrique et le cumul de pluie ne sont pas les seuls à expliquer la réponse du
bassin en crue. On voit par exemple que l’épisode de septembre 2003 présente un état
hydrique très sec (Hu2 = 51.8 %) en début d’épisode mais un débit de pointe élevé (QHp = 91
m3/s) par rapport aux autres épisodes présentant un même cumul de pluie d’environ 120 mm
(figure 44 : rectangle bleu). Les épisodes de novembre 1999, octobre 2002 et janvier 2006
présentent en effet un débit de pointe de 50 m3/s environ pour un état hydrique initial de Hu2
y = 1,49x - 103
R2 = 0,70
0
50
100
150
200
250
300
350
400
450
500
0 50 100 150 200 250 300 350 400
Cumul de Pluie à Prades (mm)
Dé
bit d
e p
oin
te h
ora
ire
(m
3/s
)
CHAPITRE 4 : ANALYSE DES CARACTERISTIQUES DES EPISODES DE CRUE
- 120 -
= 64 % environ. Cette anomalie peut s’expliquer par les fortes intensités (30 mm/h pour
l’intensité horaire maximale) et la localisation de la pluie en septembre 2003 située près de
l’exutoire, dans une zone relativement imperméable. Un autre épisode particulier est celui
d’octobre 2001 qui présente un débit de pointe très élevé (QHp = 238 m3/s) par rapport à son
cumul de pluie (116 mm). Cette anomalie peut s’expliquer par les intensités de pluie très
importantes de cet épisode. La pluie est tombée en 4 ou 5 h avec une intensité horaire
maximale pouvant atteindre près de 50 mm/h contre 10 mm/h, 20 mm/h voire 30 mm/h pour
les autres épisodes présentant les mêmes cumuls.
5. Conclusion
L’échantillon des crues sélectionnées présente 27 épisodes qui ont lieu principalement
en automne ou en hiver. Il contient une large gamme de crues d’intensités différentes. En
effet, les débits de pointe vont de 8 m3/s (période de retour d’1 an) à plus de 450 m
3/s (période
de retour supérieure à 10 ans). Cet échantillon présente une saisonnalité marquée entre les
premiers épisodes de début d’automne et ceux de fin d’automne ou d’hiver.
Les épisodes de début d’automne surviennent après la période de sécheresse estivale.
Les sols sont secs (humidités faibles) et l’aquifère déprimé (piézométrie faible). La proportion
de pluie s’écoulant à l’exutoire est alors faible avec un coefficient de ruissellement moyen de
0,4. Aussi, les récessions des hydrogrammes observés à Lavalette sont peu soutenues. Enfin
les mesures de pluies radar réalisées pour ces épisodes sont généralement de bonne qualité.
Les épisodes de fin d’automne ou d’hiver surviennent après les premières grosses
pluies. Les sols sont alors plus humides et l’aquifère est rechargé par les premières pluies.
L’humidité des sols et la piézométrie sont alors plus élevées qu’en début d’automne. La
proportion de pluie s’écoulant à l’exutoire est alors plus importante avec un coefficient de
ruissellement moyen de 0,8. Les récessions des hydrogrammes observés à Lavalette sont
également plus soutenues. Enfin, les pluies radar disponibles sur ces épisodes sont de
qualité plus médiocre. Ceci s’explique par le fait qu’à cette époque, la faible extension
verticale du nuage et la faible altitude de l’isotherme 0°C détériorent la qualité de la mesure
du radar qui est situé à une distance moyenne de 60 km par rapport à l’hydrosystème.
La modélisation des crues à Lavalette devra donc tenir compte de la pluie mais aussi
de l’état hydrique initial de l’hydrosystème et refléter la saisonnalité observée.
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 121 -
CHAPITRE 5 : APPLICATION D’UN MODELE
HYDROLOGIQUE POUR LA SIMULATION DES CRUES DU
LEZ
Ce chapitre présente l’application d’un modèle hydrologique pour représenter les crues
du Lez à la station de Lavalette. Compte tenu de l’objectif visé (la prévision), du
fonctionnement complexe et mal connu de l’hydrosystème et des caractéristiques des pluies
méditerranéennes, un modèle pluie-débit à réservoir, événementiel, distribué, parcimonieux et
fonctionnant à pas de temps horaire est utilisé (cf. conclusion du chapitre 1). La section 1 du
chapitre présente les différentes options de modélisation choisies, notamment au niveau de la
fonction de production; ces options sont comparées dans la section 2, qui conduit à
sélectionner le modèle de production le mieux adapté; finalement, les performances du
modèle retenu dans le cas du Lez sont discutées dans la section 3.
1. Un modèle hydrologique pour les crues du Lez
Le modèle hydrologique retenu repose sur les principes suivants :
- conceptuel ou « à réservoir » : pour une représentation simplifiée des processus
impliqués dans les crues « éclair » en milieu karstique et notamment l’importance
des écoulements souterrains. Cette représentation simplifiée permet néanmoins de
prendre en compte explicitement l’état hydrique du bassin, à travers la dynamique
du réservoir ;
- distribué : pour prendre en compte la variabilité spatiale de la pluie, importante en
milieu méditerranéen ;
- événementiel : pour limiter le volume de données aux périodes d'intérêt, les crues,
limiter le nombre de paramètres du modèle, et favoriser la parcimonie
- parcimonieux, pour réduire les problèmes d'équifinalité et faciliter la calibration du
modèle ;
- frugal : pour être utilisable en prévision lorsque les données en temps réel sont
limitées.
1.1. Organisation générale du modèle
Cette section décrit l’organisation et le fonctionnement général du modèle
hydrologique qui va être utilisé (figure 45).
Le bassin versant est tout d’abord discrétisé en mailles carrées régulières. Les mailles
sont documentées à l’aide d’un modèle numérique de terrain (MNT). Le MNT permet de
reconstituer le modèle de drainage de l’ensemble du bassin, c’est-à-dire la direction de
drainage de l’eau dans chaque maille. Pour le bassin versant du Lez, ce MNT a une résolution
de 75 m.
Les pluies sont calculées sur chaque maille par la méthode des polygones de Thiessen.
Les données en entrée sont soit des observations des postes pluviométriques, soit des données
du radar de Nîmes, situé à environ 60 km de l'exutoire du bassin à Lavalette. Le pas de temps
utilisé pour les pluies est le pas de temps horaire.
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 122 -
La fonction de production du modèle réalise pour chaque maille et pour chaque pas de
temps la transformation de la précipitation en quantité potentiellement disponible à
l'écoulement vers l'exutoire du bassin. La géologie et les sols du bassin présentent une
variabilité spatiale importante susceptible d'induire des conditions de production sensiblement
différentes. Malgré cela, les paramètres de production n’ont pas été spatialisés pour ne pas
augmenter le nombre de paramètres et respecter le principe de parcimonie du modèle. D'après
Boyle et al. (2001), la spatialisation des paramètres de production est un facteur de second
ordre, par rapport à la spatialisation des pluies. Deux fonctions de production, dérivées du
modèle du Soil Conservation Service, ont été retenues initialement. Ces deux fonctions se
distinguent par leur façon de représenter l’état hydrique du bassin versant. Elles présentent
toutes deux des innovations pour gérer la diminution du coefficient de ruissellement en cas
d’intermittence temporelle des pluies et pour représenter les écoulements retardés, liés au
ressuyage des sols ou à la vidange des réservoirs profonds.
La fonction de transfert du modèle achemine les volumes produits par chaque maille à
l'exutoire du bassin. La fonction de transfert utilisée est une fonction de type lag and route,
qui combine un opérateur de translation et un opérateur de stockage. L'hydrogramme complet
de la crue est calculé comme étant la somme des hydrogrammes élémentaires produits par
chacune des mailles.
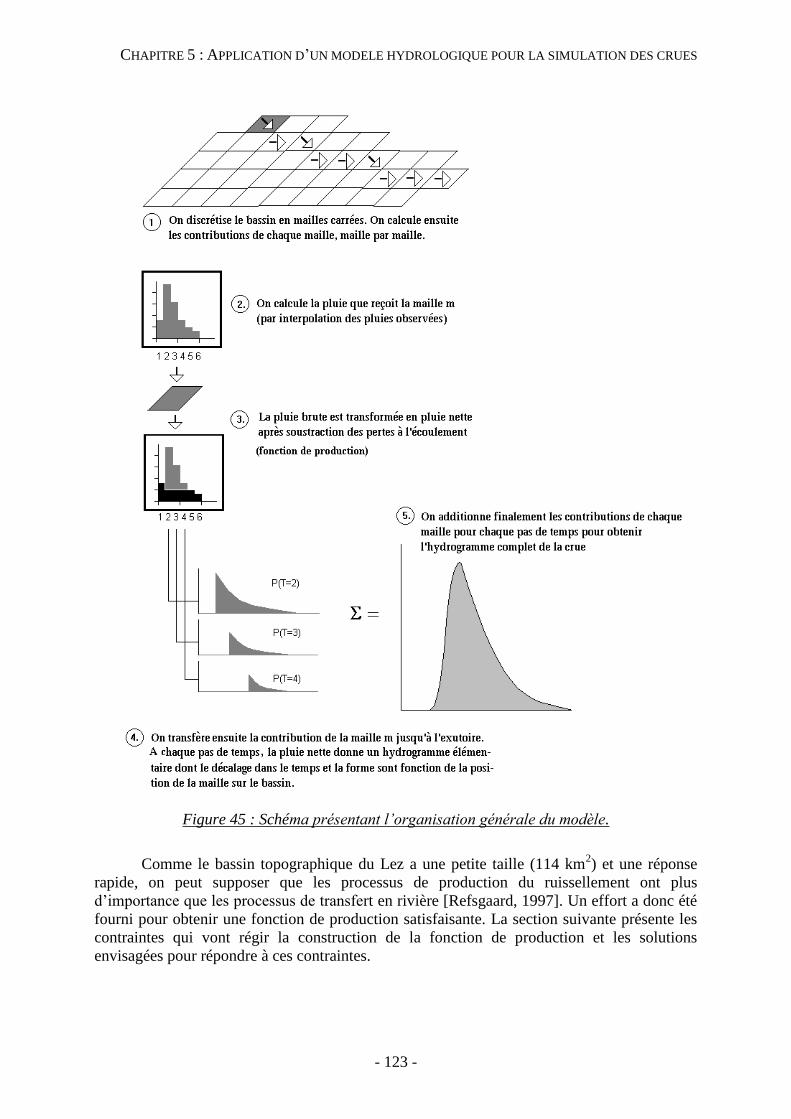
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 123 -
Figure 45 : Schéma présentant l’organisation générale du modèle.
Comme le bassin topographique du Lez a une petite taille (114 km2) et une réponse
rapide, on peut supposer que les processus de production du ruissellement ont plus
d’importance que les processus de transfert en rivière [Refsgaard, 1997]. Un effort a donc été
fourni pour obtenir une fonction de production satisfaisante. La section suivante présente les
contraintes qui vont régir la construction de la fonction de production et les solutions
envisagées pour répondre à ces contraintes.
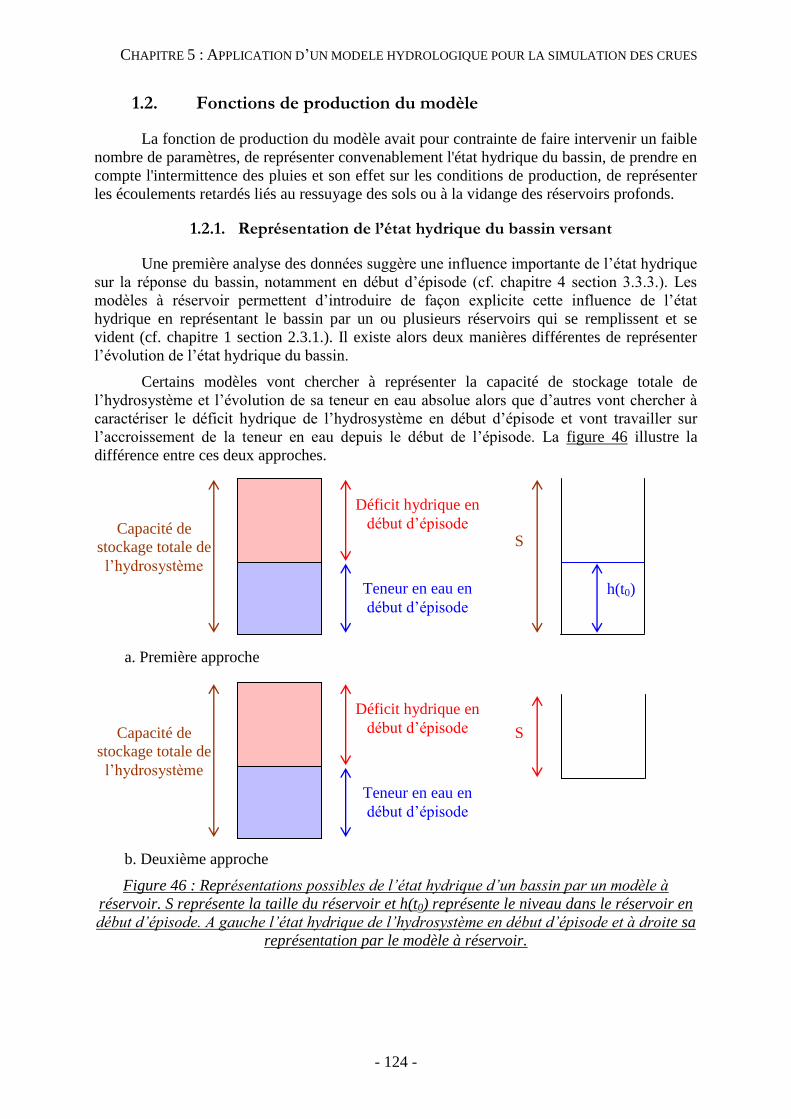
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 124 -
1.2. Fonctions de production du modèle
La fonction de production du modèle avait pour contrainte de faire intervenir un faible
nombre de paramètres, de représenter convenablement l'état hydrique du bassin, de prendre en
compte l'intermittence des pluies et son effet sur les conditions de production, de représenter
les écoulements retardés liés au ressuyage des sols ou à la vidange des réservoirs profonds.
1.2.1. Représentation de l’état hydrique du bassin versant
Une première analyse des données suggère une influence importante de l’état hydrique
sur la réponse du bassin, notamment en début d’épisode (cf. chapitre 4 section 3.3.3.). Les
modèles à réservoir permettent d’introduire de façon explicite cette influence de l’état
hydrique en représentant le bassin par un ou plusieurs réservoirs qui se remplissent et se
vident (cf. chapitre 1 section 2.3.1.). Il existe alors deux manières différentes de représenter
l’évolution de l’état hydrique du bassin.
Certains modèles vont chercher à représenter la capacité de stockage totale de
l’hydrosystème et l’évolution de sa teneur en eau absolue alors que d’autres vont chercher à
caractériser le déficit hydrique de l’hydrosystème en début d’épisode et vont travailler sur
l’accroissement de la teneur en eau depuis le début de l’épisode. La figure 46 illustre la
différence entre ces deux approches.
a. Première approche
b. Deuxième approche
Figure 46 : Représentations possibles de l’état hydrique d’un bassin par un modèle à
réservoir. S représente la taille du réservoir et h(t0) représente le niveau dans le réservoir en
début d’épisode. A gauche l’état hydrique de l’hydrosystème en début d’épisode et à droite sa
représentation par le modèle à réservoir.
Capacité de
stockage totale de
l’hydrosystème
Déficit hydrique en
début d’épisode
Teneur en eau en
début d’épisode
Capacité de
stockage totale de
l’hydrosystème
Déficit hydrique en
début d’épisode
Teneur en eau en
début d’épisode
h(t0)
S
S

CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 125 -
La première approche (figure 46a) considère que la taille du réservoir C représente la
capacité de stockage totale de l’hydrosystème. Cette dernière reste la même pour l’ensemble
des épisodes simulés. Pour déterminer l’état hydrique de l’hydrosystème au début de chaque
épisode, on ajuste le niveau dans le réservoir h(t0). Deux paramètres doivent donc être ajustés
: la capacité du réservoir, constante pour l’ensemble des épisodes, et le niveau initial du
réservoir, différent d’un épisode à l’autre. L’évolution du niveau dans le réservoir représente
l’évolution de la teneur en eau absolue de l’hydrosystème.
Dans la seconde approche (figure 46b), le réservoir est toujours initialement vide. Sa
taille C, représente le déficit hydrique de l’hydrosystème en début d’épisode et s’ajuste donc
d'un épisode sur l’autre. L’évolution du niveau dans le réservoir représente donc les
accroissements de la teneur en eau par rapport au début de l’épisode.
Pour tester ces deux représentations de l’état hydrique de l’hydrosystème, deux
fonctions de production dérivées du Soil Conservation Service (SCS) ont été utilisées. Il s’agit
de la fonction de production SMA-SCS [Michel et al., 2005] et du SCS-CN, utilisé en mode
instantané par [Gaume et al., 2004].
Le SMA-SCS : représentation de la capacité de stockage totale de l’hydrosystème
La fonction de production SMA-SCS [Michel et al., 2005] est une généralisation de la
fonction SCS d’origine. Elle est représentée par un réservoir « sol » (figure 47) qui permet le
calcul de la pluie efficace (ou ruissellement direct) directement en fonction du niveau dans le
réservoir "sol" :
(Eq. 62)
où ie(t) est l’intensité de pluie efficace (ruissellement direct), ib(t) est l’intensité de pluie brute,
V(t) est le niveau dans le réservoir « sol », Sa=S/3 est le seuil du réservoir « sol » au-delà
duquel le ruissellement se déclenche et S est la taille du réservoir sol au-dessus du seuil de
ruissellement. Cette fonction correspond donc à un coefficient de ruissellement C(t) variable,
qui dépend à la fois du niveau dans le réservoir « sol » V(t), du paramètre S fixant la taille du
réservoir « sol » et de la hauteur du seuil de ruissellement Sa (figure 47).
(Eq. 63)
L’évolution du niveau V(t) est régie par l’équation différentielle ordinaire (EDO)
suivante :
(Eq. 64)
sinon0)(
)(si)(
2)(
)()(
ti
StVS
StV
S
StVtiti
e
a
aa
be
sinon0)(
)(si )(
2)(
)(
tC
StVS
StV
S
StVtC a
aa
)()()(
titidt
tdVeb
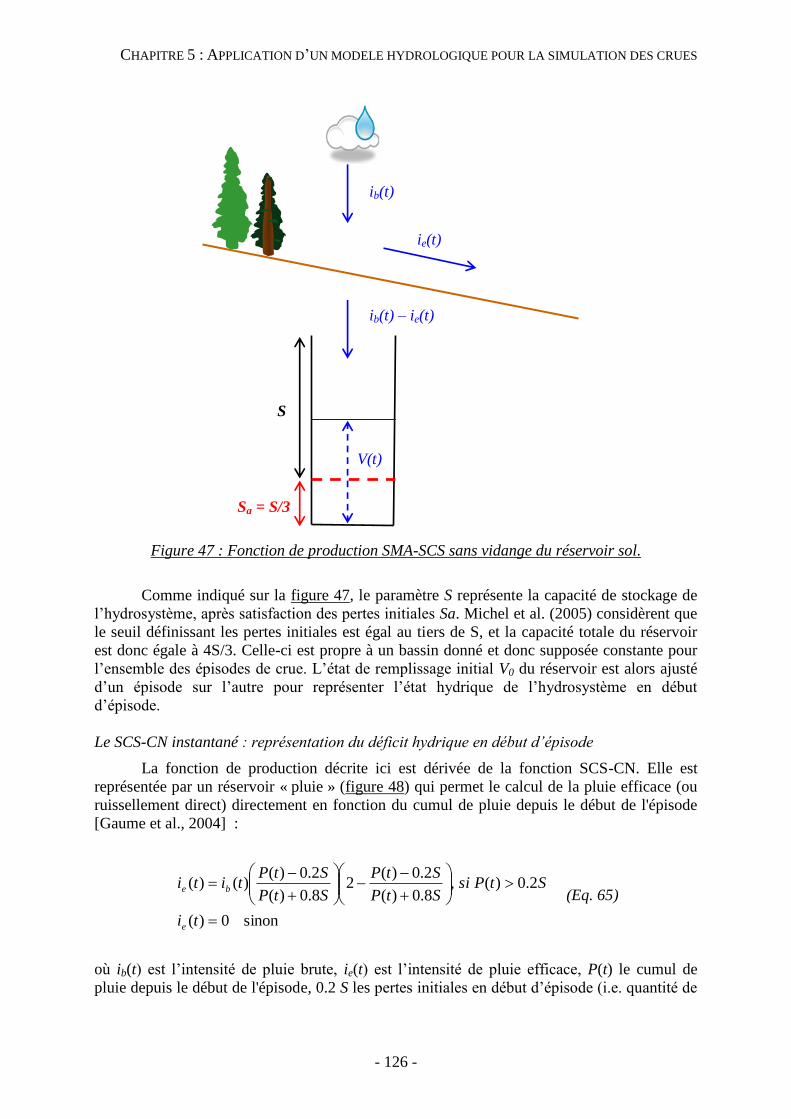
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 126 -
Figure 47 : Fonction de production SMA-SCS sans vidange du réservoir sol.
Comme indiqué sur la figure 47, le paramètre S représente la capacité de stockage de
l’hydrosystème, après satisfaction des pertes initiales Sa. Michel et al. (2005) considèrent que
le seuil définissant les pertes initiales est égal au tiers de S, et la capacité totale du réservoir
est donc égale à 4S/3. Celle-ci est propre à un bassin donné et donc supposée constante pour
l’ensemble des épisodes de crue. L’état de remplissage initial V0 du réservoir est alors ajusté
d’un épisode sur l’autre pour représenter l’état hydrique de l’hydrosystème en début
d’épisode.
Le SCS-CN instantané : représentation du déficit hydrique en début d’épisode
La fonction de production décrite ici est dérivée de la fonction SCS-CN. Elle est
représentée par un réservoir « pluie » (figure 48) qui permet le calcul de la pluie efficace (ou
ruissellement direct) directement en fonction du cumul de pluie depuis le début de l'épisode
[Gaume et al., 2004] :
(Eq. 65)
où ib(t) est l’intensité de pluie brute, ie(t) est l’intensité de pluie efficace, P(t) le cumul de
pluie depuis le début de l'épisode, 0.2 S les pertes initiales en début d’épisode (i.e. quantité de
sinon0)(
2.0)(,8.0)(
2.0)(2
8.0)(
2.0)()()(
ti
StPsiStP
StP
StP
StPtiti
e
be
V(t)
ib(t) – ie(t)
Sa = S/3
S
ib(t)
ie(t)
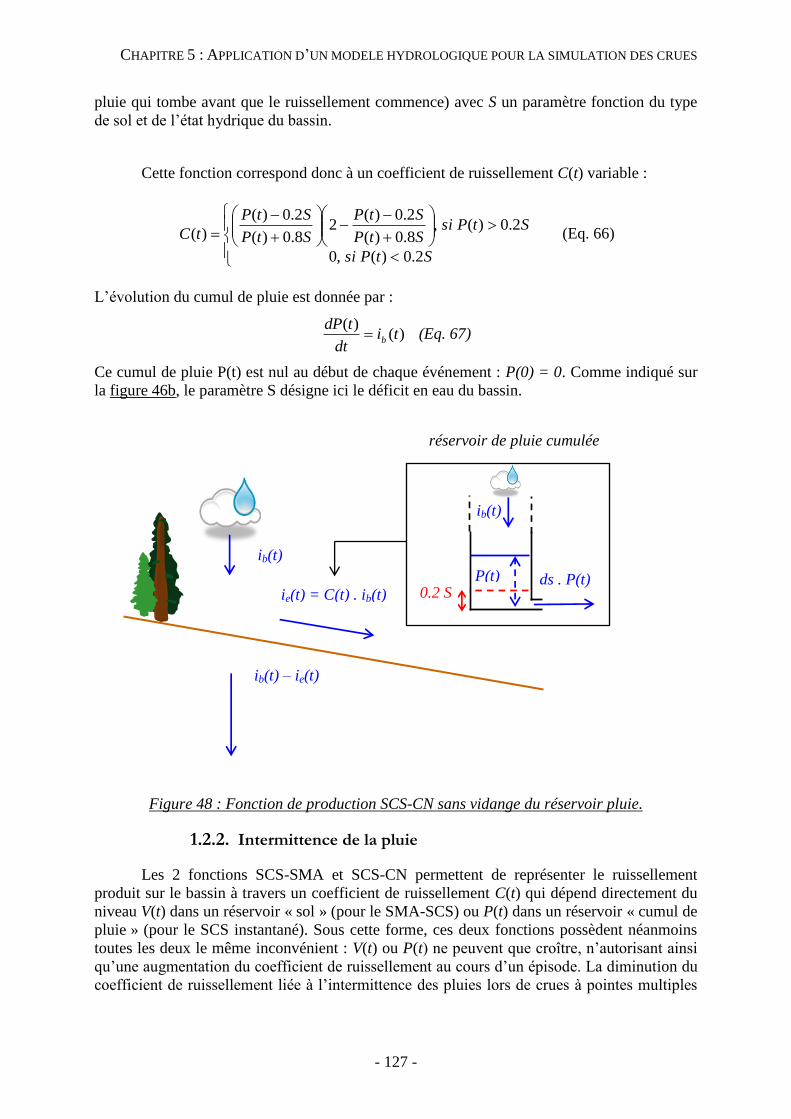
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 127 -
pluie qui tombe avant que le ruissellement commence) avec S un paramètre fonction du type
de sol et de l’état hydrique du bassin.
Cette fonction correspond donc à un coefficient de ruissellement C(t) variable :
StPsi
StPsiStP
StP
StP
StP
tC
2.0)(,0
2.0)(,8.0)(
2.0)(2
8.0)(
2.0)(
)( (Eq. 66)
L’évolution du cumul de pluie est donnée par :
(Eq. 67)
Ce cumul de pluie P(t) est nul au début de chaque événement : P(0) = 0. Comme indiqué sur
la figure 46b, le paramètre S désigne ici le déficit en eau du bassin.
Figure 48 : Fonction de production SCS-CN sans vidange du réservoir pluie.
1.2.2. Intermittence de la pluie
Les 2 fonctions SCS-SMA et SCS-CN permettent de représenter le ruissellement
produit sur le bassin à travers un coefficient de ruissellement C(t) qui dépend directement du
niveau V(t) dans un réservoir « sol » (pour le SMA-SCS) ou P(t) dans un réservoir « cumul de
pluie » (pour le SCS instantané). Sous cette forme, ces deux fonctions possèdent néanmoins
toutes les deux le même inconvénient : V(t) ou P(t) ne peuvent que croître, n’autorisant ainsi
qu’une augmentation du coefficient de ruissellement au cours d’un épisode. La diminution du
coefficient de ruissellement liée à l’intermittence des pluies lors de crues à pointes multiples
)()(
tidt
tdPb
id(t)
ds . P(t)
0.2 S
P(t)
ie(t) = C(t) . ib(t)
ib(t)
ib(t)
ds . P(t)
0.2 S
P(t)
ie(t) = C(t) . ib(t)
ib(t) – ie(t)
réservoir de pluie cumulée
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 128 -
n’est pas donc pas possible. Ces fonctions de production ont donc été aménagées afin de tenir
compte de ce phénomène.
Lors des périodes sans pluie séparant deux averses successives, on peut supposer que
le coefficient de ruissellement diminue, pour des raisons liées par exemple au ressuyage des
sols ou à la vidange des réservoirs profonds, et à un degré moindre, à l'évaporation. Afin de
tenir compte de ce phénomène, une vidange a été appliquée au réservoir de production des 2
fonctions proposées dans la section précédente. Cette vidange conduit à une diminution du
niveau dans le réservoir de production entre 2 averses et par conséquent à une diminution du
coefficient de ruissellement. La vidange choisie est dans les 2 cas proportionnelle au niveau
dans le réservoir de production.
Dans le cas du SMA-SCS, l’EDO qui régit l’évolution du niveau dans le réservoir
« sol » devient :
où V(t) est le niveau dans le réservoir « sol » au temps t, ib(t) est l’intensité de pluie brute à t,
ie(t) est l’intensité de pluie efficace (ruissellement direct), ds est le coefficient de vidange. La
vidange ds.V(t) est bien proportionnelle au niveau V(t) dans le réservoir « sol ». Dans le cas
du SMA-SCS, V(0) = V0 étant non nul, la vidange commence dès le début de l’épisode.
Dans le cas du SCS-CN, une vidange est appliquée au réservoir « cumul de pluie ».
L’EDO devient alors :
où ib(t) est l’intensité de pluie brute à t, P(t) est le niveau dans le réservoir cumul de pluie à t
et ds est le coefficient de vidange appliqué au cumul de pluie P(t). Dans le cas du SCS-CN,
comme P(0) = 0, la vidange est nulle au début de l'épisode.
Avec l’ajout d’une vidange à leur réservoir de production, les deux fonctions
permettent maintenant de représenter la diminution du coefficient de ruissellement au cours
d’un épisode pluvieux lorsque les pluies s’arrêtent. Néanmoins, ce coefficient de
ruissellement est utilisé pour représenter uniquement les écoulements rapides lors d’une crue.
Il ne permet pas de représenter les écoulements retardés qui suivent le pic de crue et viennent
soutenir les écoulements dans la phase de récession (ressuyage des sols, vidange des
réservoirs profonds). Un dernier aménagement a donc été apporté à ces 2 fonctions de
production pour représenter au mieux ces écoulements retardés.
1.2.3. Représentation d'un écoulement retardé
Les écoulements retardés dus au ressuyage des sols ou à la vidange des réservoirs
profonds permettent de soutenir les écoulements dans la phase de récession de la crue. Dans
chacune des fonctions de production, une partie de la vidange du réservoir « sol » sera alors
utilisée pour représenter ces écoulements retardés id(t) et viendra s’additionner à l’écoulement
rapide (ruissellement) ie(t) obtenu à partir du coefficient de ruissellement. L’écoulement de
surface total it(t) au temps t est alors donné par :
)(.)()()(
tVdstitidt
tdVeb
)(.)()(
tPdstidt
tdPb
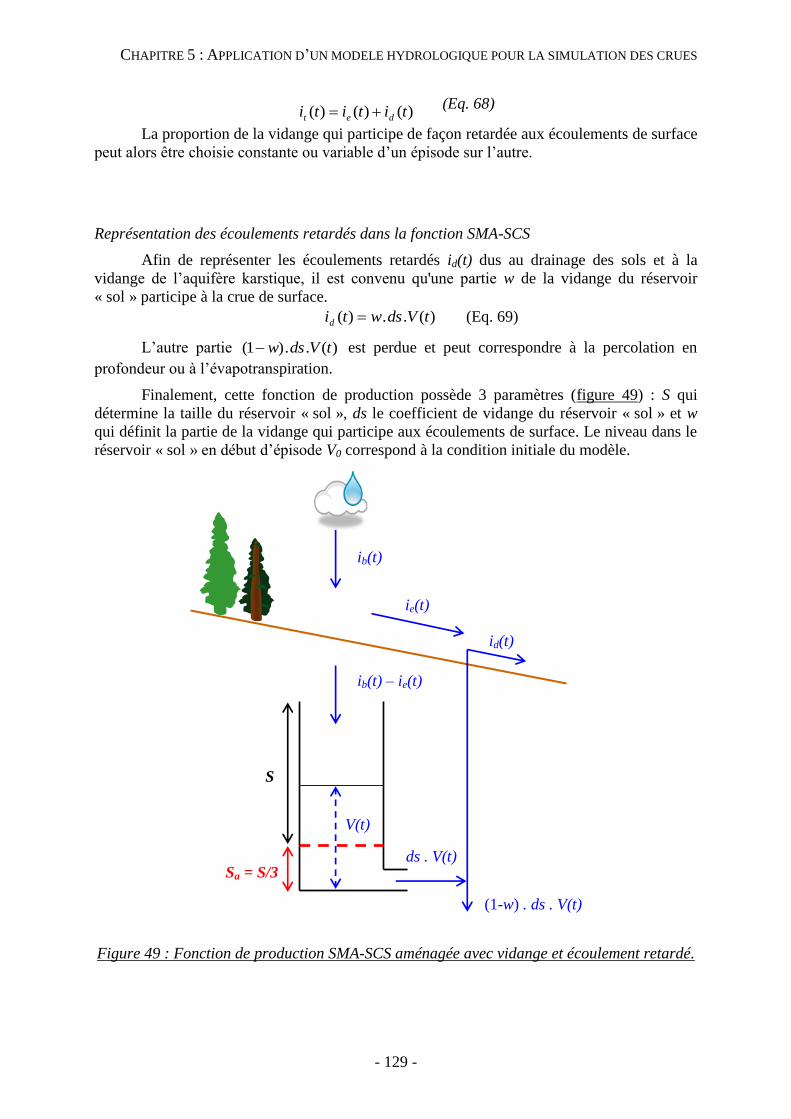
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 129 -
(Eq. 68)
La proportion de la vidange qui participe de façon retardée aux écoulements de surface
peut alors être choisie constante ou variable d’un épisode sur l’autre.
Représentation des écoulements retardés dans la fonction SMA-SCS
Afin de représenter les écoulements retardés id(t) dus au drainage des sols et à la
vidange de l’aquifère karstique, il est convenu qu'une partie w de la vidange du réservoir
« sol » participe à la crue de surface.
(Eq. 69)
L’autre partie est perdue et peut correspondre à la percolation en
profondeur ou à l’évapotranspiration.
Finalement, cette fonction de production possède 3 paramètres (figure 49) : S qui
détermine la taille du réservoir « sol », ds le coefficient de vidange du réservoir « sol » et w
qui définit la partie de la vidange qui participe aux écoulements de surface. Le niveau dans le
réservoir « sol » en début d’épisode V0 correspond à la condition initiale du modèle.
Figure 49 : Fonction de production SMA-SCS aménagée avec vidange et écoulement retardé.
)()()( tititi det
)(..)( tVdswtid
)(..)1( tVdsw
V(t)
ib(t) – ie(t)
ds . V(t) Sa = S/3
S
ib(t)
ie(t)
id(t)
(1-w) . ds . V(t)
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 130 -
Représentation des écoulements retardés dans la fonction SCS-CN
Pour représenter les écoulements retardés dans la fonction SCS-CN, un réservoir
« sol », de capacité maximale S, a été ajouté, et couplé au réservoir "pluie" (figure 50). Le
niveau stoc(t) dans ce réservoir est nul en début d’événement : stoc(0) = 0. La capacité du
réservoir représente le déficit hydrique initial de l’hydrosystème. Ce réservoir se remplit par
infiltration, ib(t) – ie(t), et se vidange proportionnellement à son niveau stoc(t) suivant
l’équation différentielle ordinaire suivante :
(Eq. 70)
où ds est le coefficient de vidange du réservoir « sol ». Par souci de parcimonie, il s’agit du
même coefficient de vidange que celui de la pluie cumulée. Cette vidange du réservoir « sol »
est nécessaire pour représenter le lien qui existe entre l’évolution du coefficient de
ruissellement (contrôlé par P(t) dans le SCS instantané) et l’évolution de l’état hydrique du
bassin (représenté par stoc(t)). Grâce à cette vidange, le coefficient de ruissellement et le
niveau dans le réservoir « sol » évoluent de façon synchrone.
Une partie de la vidange du réservoir « sol » participe alors de façon retardée aux
écoulements de surface. Deux options ont alors été envisagées :
i) la participation de la vidange est toujours fixe. Elle est de
où w, compris entre 0 et 1, est constant d’un épisode sur l’autre et représente la proportion de
la vidange qui participe aux écoulements de surface. Le paramètre w contrôle donc le soutien
de la courbe de récession de l’hydrogramme de crue.
ii) la participation de la vidange est variable d’un épisode sur l’autre et sa variation
dépend de l’état hydrique initial du bassin. L’écoulement retardé id(t) s’exprime finalement
comme une proportion min(1,w/S) de la vidange ds.stoc(t).
(Eq. 71)
Cet aménagement permet de garder une valeur de w constante (qui n’est plus
adimensionnel mais s’exprime en mm) sur l’ensemble des épisodes tout en gardant une
proportion de la vidange participant aux écoulements de surface variable d’un épisode sur
l’autre. En effet, comme S est la condition initiale et varie d’un épisode sur l’autre, w/S est
également variable d’un épisode sur l’autre. Cette deuxième expression de la vidange repose
sur l’analyse des épisodes qui a été effectuée au chapitre 4. Ainsi, plus S est grand (plus le
bassin est sec), plus le rapport w/S est faible, moins la récession de l’hydrogramme est
soutenue. Inversement, plus S est petit (plus le bassin est humide), plus le rapport w/S est
grand (plus la récession de l’hydrogramme est soutenue).
L’autre partie [1-min(1,w/S)] . ds . stoc(t) est perdue et peut correspondre à la
percolation en profondeur ou à l’évapotranspiration.
)(.)()()(
tstocdstitidt
tdstoceb
)(..)( tVdswtid
)(..,1min)( tstocdsS
wtid
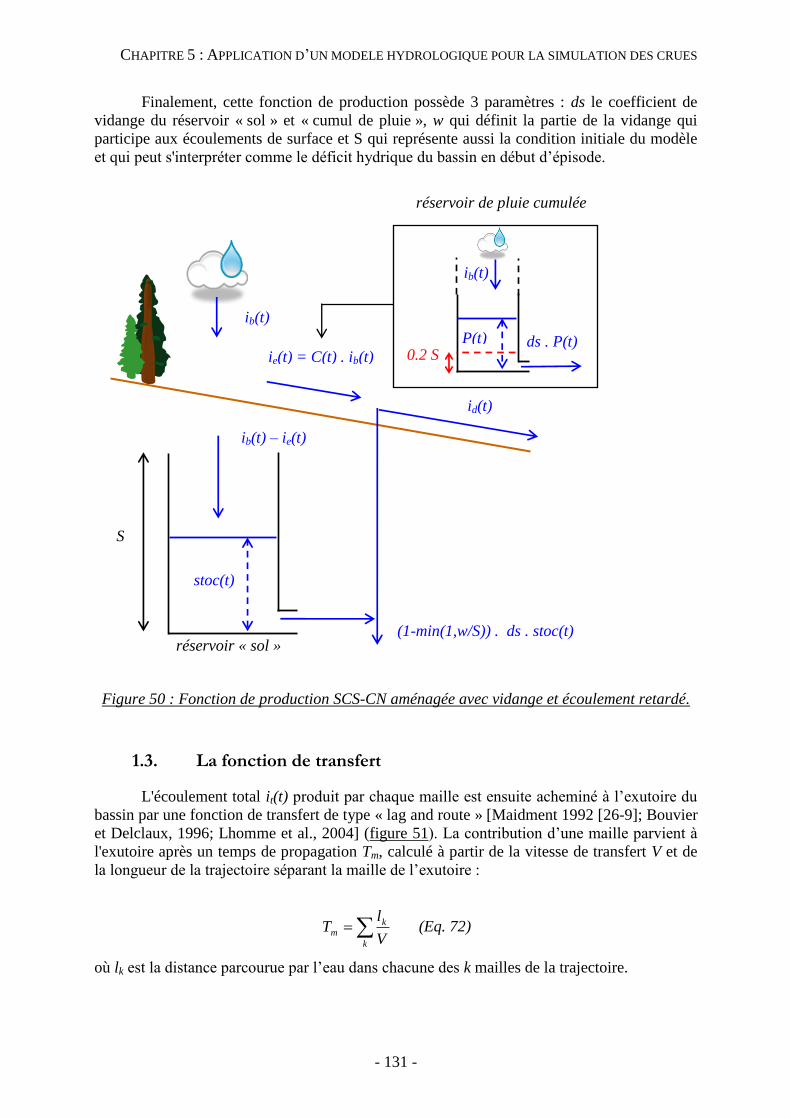
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 131 -
Finalement, cette fonction de production possède 3 paramètres : ds le coefficient de
vidange du réservoir « sol » et « cumul de pluie », w qui définit la partie de la vidange qui
participe aux écoulements de surface et S qui représente aussi la condition initiale du modèle
et qui peut s'interpréter comme le déficit hydrique du bassin en début d’épisode.
Figure 50 : Fonction de production SCS-CN aménagée avec vidange et écoulement retardé.
1.3. La fonction de transfert
L'écoulement total it(t) produit par chaque maille est ensuite acheminé à l’exutoire du
bassin par une fonction de transfert de type « lag and route » [Maidment 1992 [26-9]; Bouvier
et Delclaux, 1996; Lhomme et al., 2004] (figure 51). La contribution d’une maille parvient à
l'exutoire après un temps de propagation Tm, calculé à partir de la vitesse de transfert V et de
la longueur de la trajectoire séparant la maille de l’exutoire :
(Eq. 72)
où lk est la distance parcourue par l’eau dans chacune des k mailles de la trajectoire.
k
k
mV
lT
S
réservoir « sol »
ib(t)
ib(t)
id(t)
(1-min(1,w/S)) . ds . stoc(t)
ds . P(t)
0.2 S
P(t)
ie(t) = C(t) . ib(t)
ib(t) – ie(t)
stoc(t)
réservoir de pluie cumulée
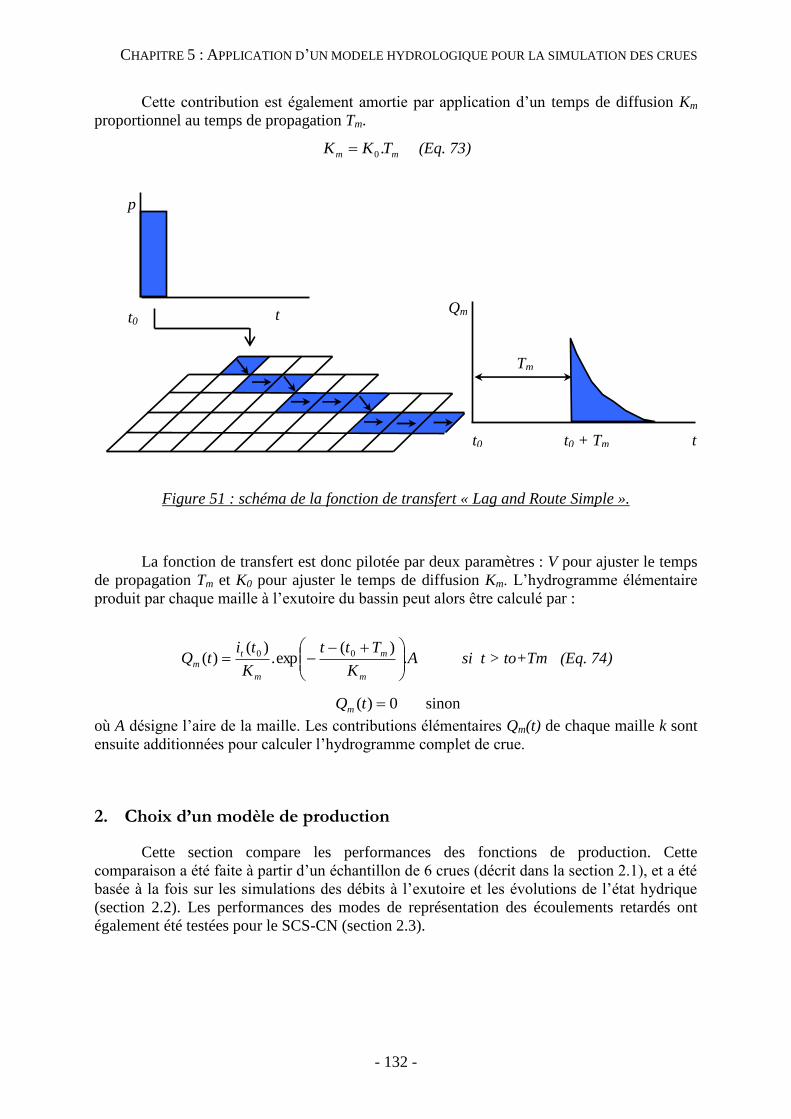
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 132 -
Cette contribution est également amortie par application d’un temps de diffusion Km
proportionnel au temps de propagation Tm.
(Eq. 73)
Figure 51 : schéma de la fonction de transfert « Lag and Route Simple ».
La fonction de transfert est donc pilotée par deux paramètres : V pour ajuster le temps
de propagation Tm et K0 pour ajuster le temps de diffusion Km. L’hydrogramme élémentaire
produit par chaque maille à l’exutoire du bassin peut alors être calculé par :
si t > to+Tm (Eq. 74)
sinon
où A désigne l’aire de la maille. Les contributions élémentaires Qm(t) de chaque maille k sont
ensuite additionnées pour calculer l’hydrogramme complet de crue.
2. Choix d’un modèle de production
Cette section compare les performances des fonctions de production. Cette
comparaison a été faite à partir d’un échantillon de 6 crues (décrit dans la section 2.1), et a été
basée à la fois sur les simulations des débits à l’exutoire et les évolutions de l’état hydrique
(section 2.2). Les performances des modes de représentation des écoulements retardés ont
également été testées pour le SCS-CN (section 2.3).
mm TKK .0
AK
Ttt
K
titQ
m
m
m
t
m .)(
exp.)(
)( 00
0)( tQm
t0 t
p
Qm
Tm
t0 t0 + Tm t
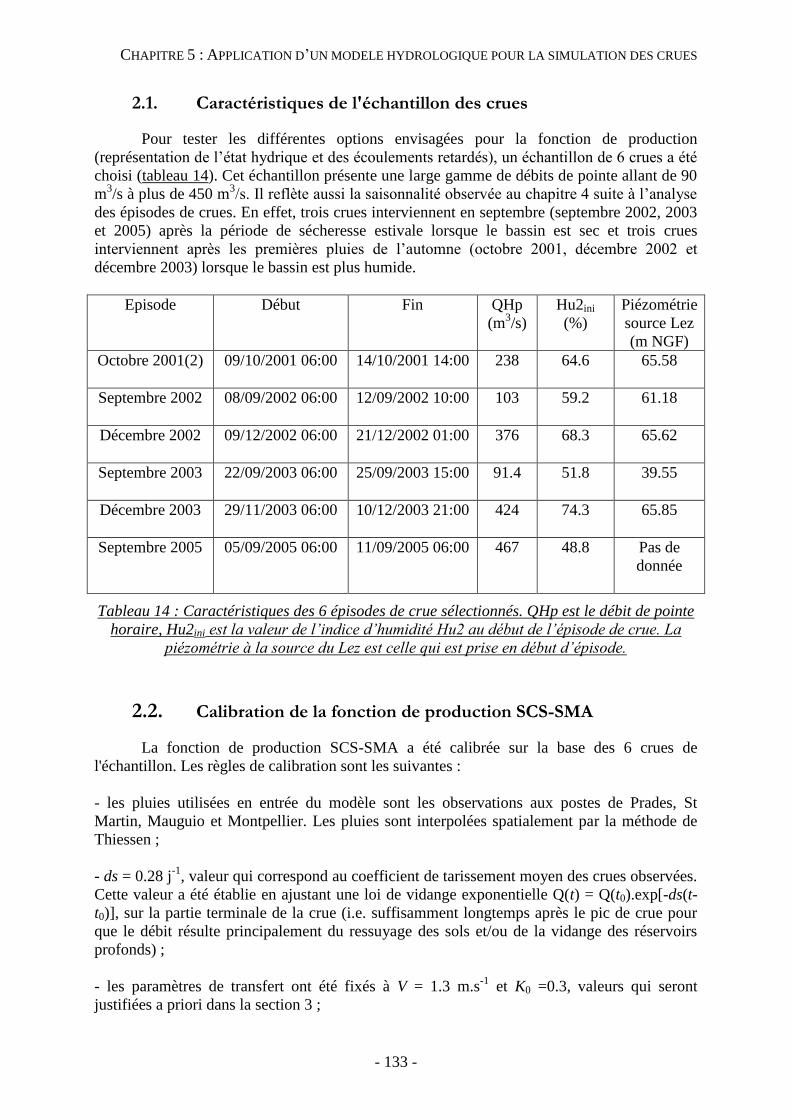
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 133 -
2.1. Caractéristiques de l'échantillon des crues
Pour tester les différentes options envisagées pour la fonction de production
(représentation de l’état hydrique et des écoulements retardés), un échantillon de 6 crues a été
choisi (tableau 14). Cet échantillon présente une large gamme de débits de pointe allant de 90
m3/s à plus de 450 m
3/s. Il reflète aussi la saisonnalité observée au chapitre 4 suite à l’analyse
des épisodes de crues. En effet, trois crues interviennent en septembre (septembre 2002, 2003
et 2005) après la période de sécheresse estivale lorsque le bassin est sec et trois crues
interviennent après les premières pluies de l’automne (octobre 2001, décembre 2002 et
décembre 2003) lorsque le bassin est plus humide.
Episode Début Fin QHp
(m3/s)
Hu2ini
(%)
Piézométrie
source Lez
(m NGF)
Octobre 2001(2) 09/10/2001 06:00 14/10/2001 14:00 238
64.6
65.58
Septembre 2002 08/09/2002 06:00
12/09/2002 10:00
103
59.2
61.18
Décembre 2002 09/12/2002 06:00
21/12/2002 01:00
376
68.3
65.62
Septembre 2003 22/09/2003 06:00 25/09/2003 15:00
91.4
51.8
39.55
Décembre 2003 29/11/2003 06:00
10/12/2003 21:00
424
74.3 65.85
Septembre 2005 05/09/2005 06:00
11/09/2005 06:00
467
48.8
Pas de
donnée
Tableau 14 : Caractéristiques des 6 épisodes de crue sélectionnés. QHp est le débit de pointe
horaire, Hu2ini est la valeur de l’indice d’humidité Hu2 au début de l’épisode de crue. La
piézométrie à la source du Lez est celle qui est prise en début d’épisode.
2.2. Calibration de la fonction de production SCS-SMA
La fonction de production SCS-SMA a été calibrée sur la base des 6 crues de
l'échantillon. Les règles de calibration sont les suivantes :
- les pluies utilisées en entrée du modèle sont les observations aux postes de Prades, St
Martin, Mauguio et Montpellier. Les pluies sont interpolées spatialement par la méthode de
Thiessen ;
- ds = 0.28 j-1
, valeur qui correspond au coefficient de tarissement moyen des crues observées.
Cette valeur a été établie en ajustant une loi de vidange exponentielle Q(t) = Q(t0).exp[-ds(t-
t0)], sur la partie terminale de la crue (i.e. suffisamment longtemps après le pic de crue pour
que le débit résulte principalement du ressuyage des sols et/ou de la vidange des réservoirs
profonds) ;
- les paramètres de transfert ont été fixés à V = 1.3 m.s-1
et K0 =0.3, valeurs qui seront
justifiées a priori dans la section 3 ;
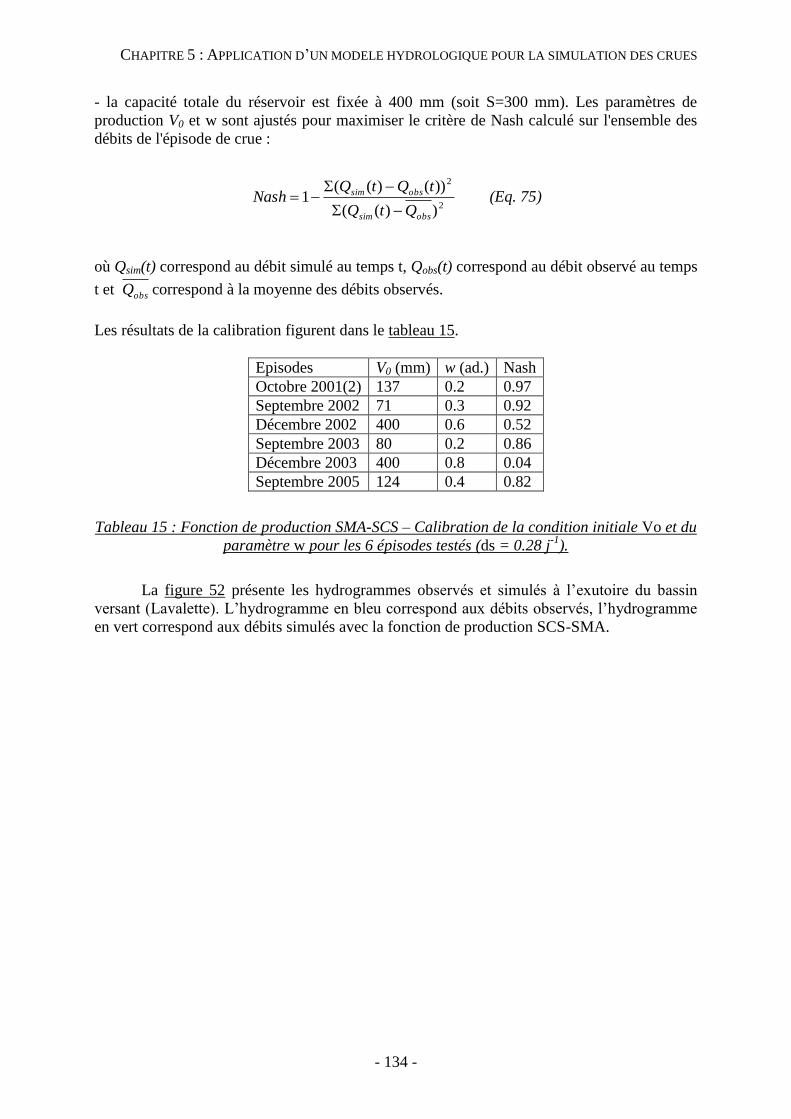
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 134 -
- la capacité totale du réservoir est fixée à 400 mm (soit S=300 mm). Les paramètres de
production V0 et w sont ajustés pour maximiser le critère de Nash calculé sur l'ensemble des
débits de l'épisode de crue :
(Eq. 75)
où Qsim(t) correspond au débit simulé au temps t, Qobs(t) correspond au débit observé au temps
t et correspond à la moyenne des débits observés.
Les résultats de la calibration figurent dans le tableau 15.
Episodes V0 (mm) w (ad.) Nash
Octobre 2001(2) 137 0.2 0.97
Septembre 2002 71 0.3 0.92
Décembre 2002 400 0.6 0.52
Septembre 2003 80 0.2 0.86
Décembre 2003 400 0.8 0.04
Septembre 2005 124 0.4 0.82
Tableau 15 : Fonction de production SMA-SCS – Calibration de la condition initiale Vo et du
paramètre w pour les 6 épisodes testés (ds = 0.28 j-1
).
La figure 52 présente les hydrogrammes observés et simulés à l’exutoire du bassin
versant (Lavalette). L’hydrogramme en bleu correspond aux débits observés, l’hydrogramme
en vert correspond aux débits simulés avec la fonction de production SCS-SMA.
2
2
))((
))()((1
obssim
obssim
QtQ
tQtQNash
obsQ
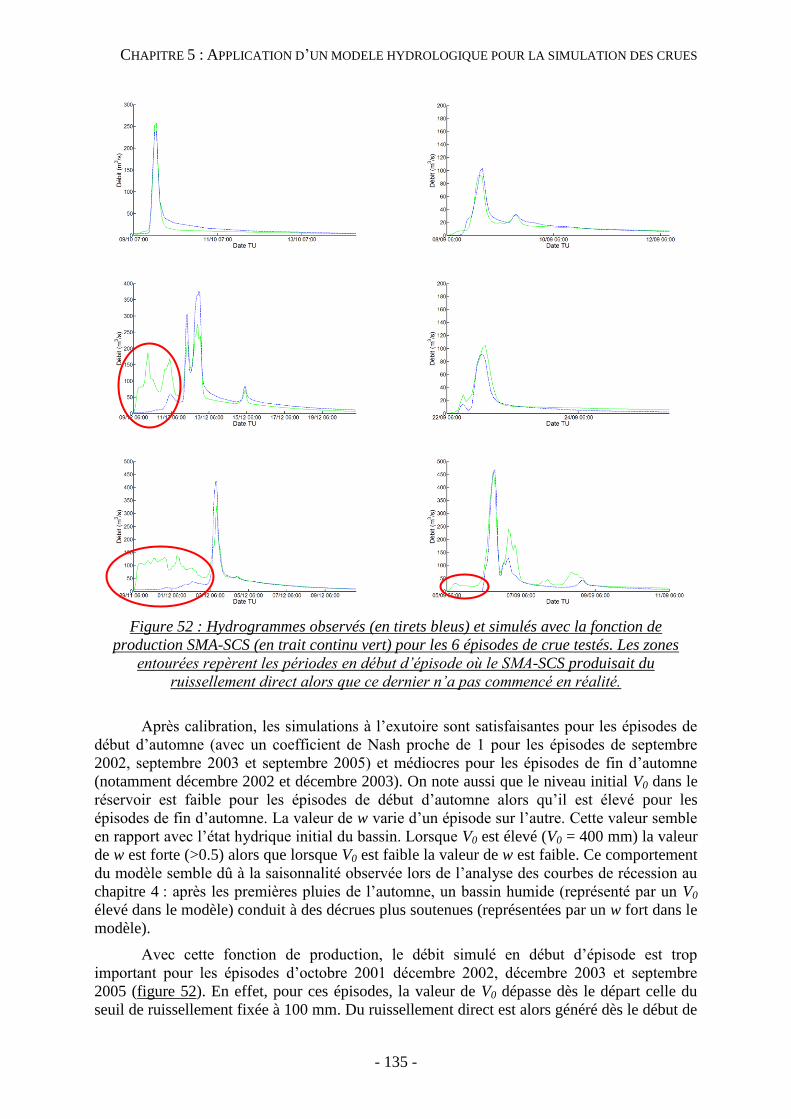
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 135 -
Figure 52 : Hydrogrammes observés (en tirets bleus) et simulés avec la fonction de
production SMA-SCS (en trait continu vert) pour les 6 épisodes de crue testés. Les zones
entourées repèrent les périodes en début d’épisode où le SMA-SCS produisait du
ruissellement direct alors que ce dernier n’a pas commencé en réalité.
Après calibration, les simulations à l’exutoire sont satisfaisantes pour les épisodes de
début d’automne (avec un coefficient de Nash proche de 1 pour les épisodes de septembre
2002, septembre 2003 et septembre 2005) et médiocres pour les épisodes de fin d’automne
(notamment décembre 2002 et décembre 2003). On note aussi que le niveau initial V0 dans le
réservoir est faible pour les épisodes de début d’automne alors qu’il est élevé pour les
épisodes de fin d’automne. La valeur de w varie d’un épisode sur l’autre. Cette valeur semble
en rapport avec l’état hydrique initial du bassin. Lorsque V0 est élevé (V0 = 400 mm) la valeur
de w est forte (>0.5) alors que lorsque V0 est faible la valeur de w est faible. Ce comportement
du modèle semble dû à la saisonnalité observée lors de l’analyse des courbes de récession au
chapitre 4 : après les premières pluies de l’automne, un bassin humide (représenté par un V0
élevé dans le modèle) conduit à des décrues plus soutenues (représentées par un w fort dans le
modèle).
Avec cette fonction de production, le débit simulé en début d’épisode est trop
important pour les épisodes d’octobre 2001 décembre 2002, décembre 2003 et septembre
2005 (figure 52). En effet, pour ces épisodes, la valeur de V0 dépasse dès le départ celle du
seuil de ruissellement fixée à 100 mm. Du ruissellement direct est alors généré dès le début de

CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 136 -
l’épisode et s’ajoute aux écoulements retardés générés par la vidange du réservoir (non nulle
puisque V0 est non nul). Sur l’hydrogramme observé, le ruissellement direct ne commence
apparemment pas dès le début de l’épisode. Celui-ci se déclenche après une certaine
quantité de pluie. Il est donc nécessaire d’introduire dans la modélisation des pertes initiales
systématiques même au début de ces épisodes de fin d’automne.
La comparaison a aussi porté sur l’évolution de l’état hydrique du bassin au cours de
la crue. La figure 53 compare la dynamique de la piézométrie à Gour Noir (en bleu) avec celle
du niveau dans le réservoir « sol » de la fonction de production à savoir SCS-SMA (en noir).
Afin de pouvoir comparer la chronique de piézométrie (en m NGF) et celle du niveau dans le
réservoir de production (en mm), les niveaux ont été normalisés de la façon suivante :
(Eq. 76)
où h(t) est le niveau (piézométrique ou dans le réservoir « sol ») au temps t, hmin et hmax sont
respectivement les niveaux minimum et maximum atteints pendant l’épisode de crue, hnorm(t)
est le niveau (piézométrique ou dans le réservoir « sol ») normalisé au temps t. Ainsi, après
normalisation, la piézométrie comme le niveau dans le réservoir « sol » de chacune des deux
fonctions de production est compris entre 0 et 1. Les niveaux peuvent alors être comparés.
On constate que le niveau de ce réservoir simulé par SCS-SMA baisse tout au long de
l’épisode ce qui n’est pas le cas de l’état hydrique de l’hydrosystème représenté par le
piézomètre de Gour Noir (figure 53). La dynamique du réservoir n'est donc pas correctement
représentée par une vidange rapide, associée à ds= 0.28 j-1
.
minmax
min)()(
hh
hththnorm
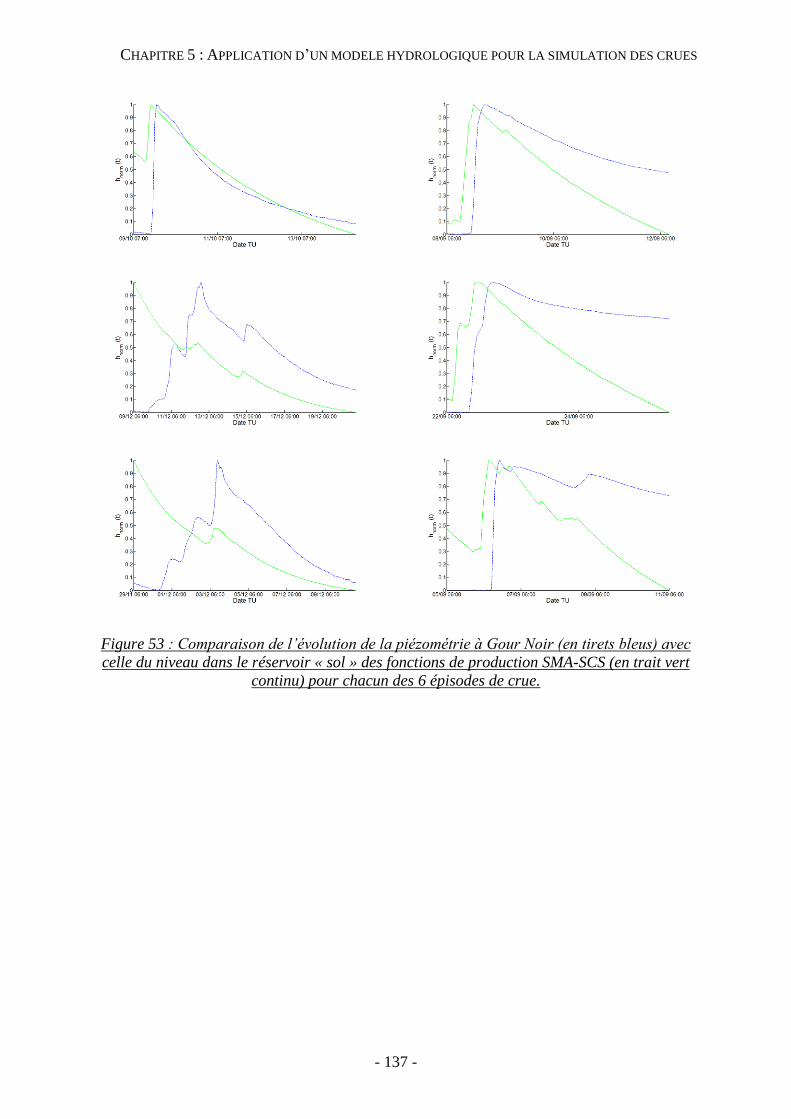
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 137 -
Figure 53 : Comparaison de l’évolution de la piézométrie à Gour Noir (en tirets bleus) avec
celle du niveau dans le réservoir « sol » des fonctions de production SMA-SCS (en trait vert
continu) pour chacun des 6 épisodes de crue.
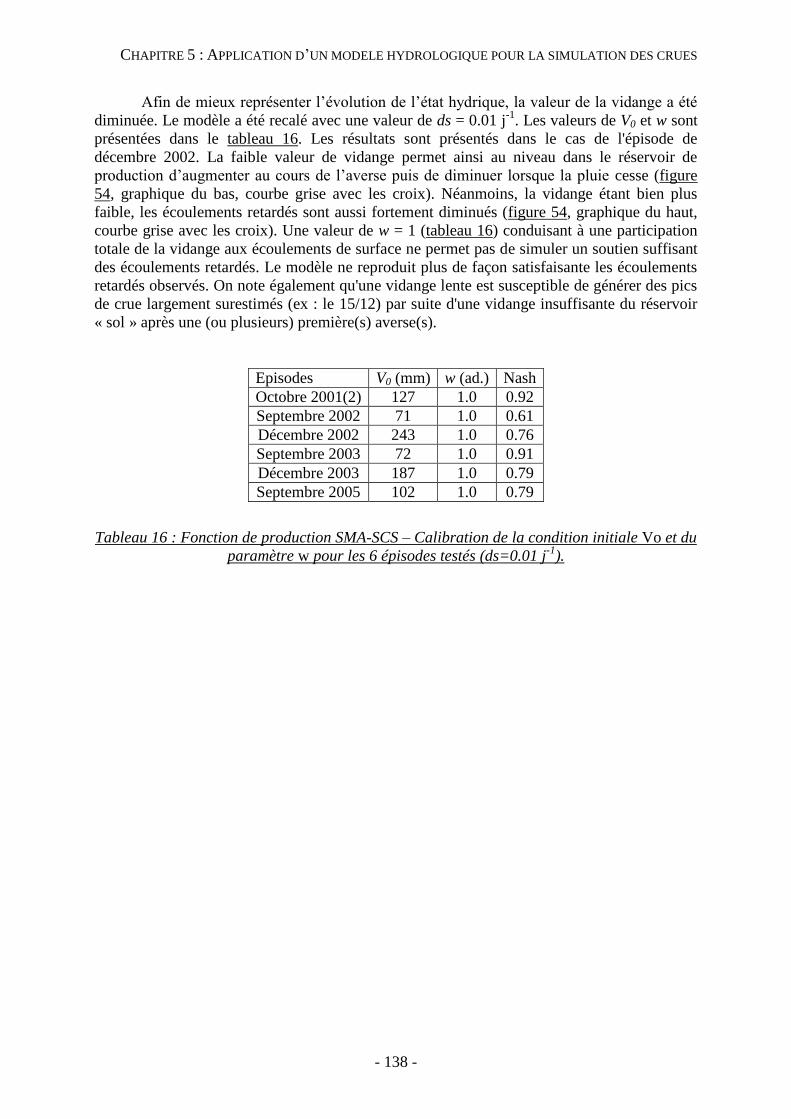
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 138 -
Afin de mieux représenter l’évolution de l’état hydrique, la valeur de la vidange a été
diminuée. Le modèle a été recalé avec une valeur de ds = 0.01 j-1
. Les valeurs de V0 et w sont
présentées dans le tableau 16. Les résultats sont présentés dans le cas de l'épisode de
décembre 2002. La faible valeur de vidange permet ainsi au niveau dans le réservoir de
production d’augmenter au cours de l’averse puis de diminuer lorsque la pluie cesse (figure
54, graphique du bas, courbe grise avec les croix). Néanmoins, la vidange étant bien plus
faible, les écoulements retardés sont aussi fortement diminués (figure 54, graphique du haut,
courbe grise avec les croix). Une valeur de w = 1 (tableau 16) conduisant à une participation
totale de la vidange aux écoulements de surface ne permet pas de simuler un soutien suffisant
des écoulements retardés. Le modèle ne reproduit plus de façon satisfaisante les écoulements
retardés observés. On note également qu'une vidange lente est susceptible de générer des pics
de crue largement surestimés (ex : le 15/12) par suite d'une vidange insuffisante du réservoir
« sol » après une (ou plusieurs) première(s) averse(s).
Episodes V0 (mm) w (ad.) Nash
Octobre 2001(2) 127 1.0 0.92
Septembre 2002 71 1.0 0.61
Décembre 2002 243 1.0 0.76
Septembre 2003 72 1.0 0.91
Décembre 2003 187 1.0 0.79
Septembre 2005 102 1.0 0.79
Tableau 16 : Fonction de production SMA-SCS – Calibration de la condition initiale Vo et du
paramètre w pour les 6 épisodes testés (ds=0.01 j-1
).
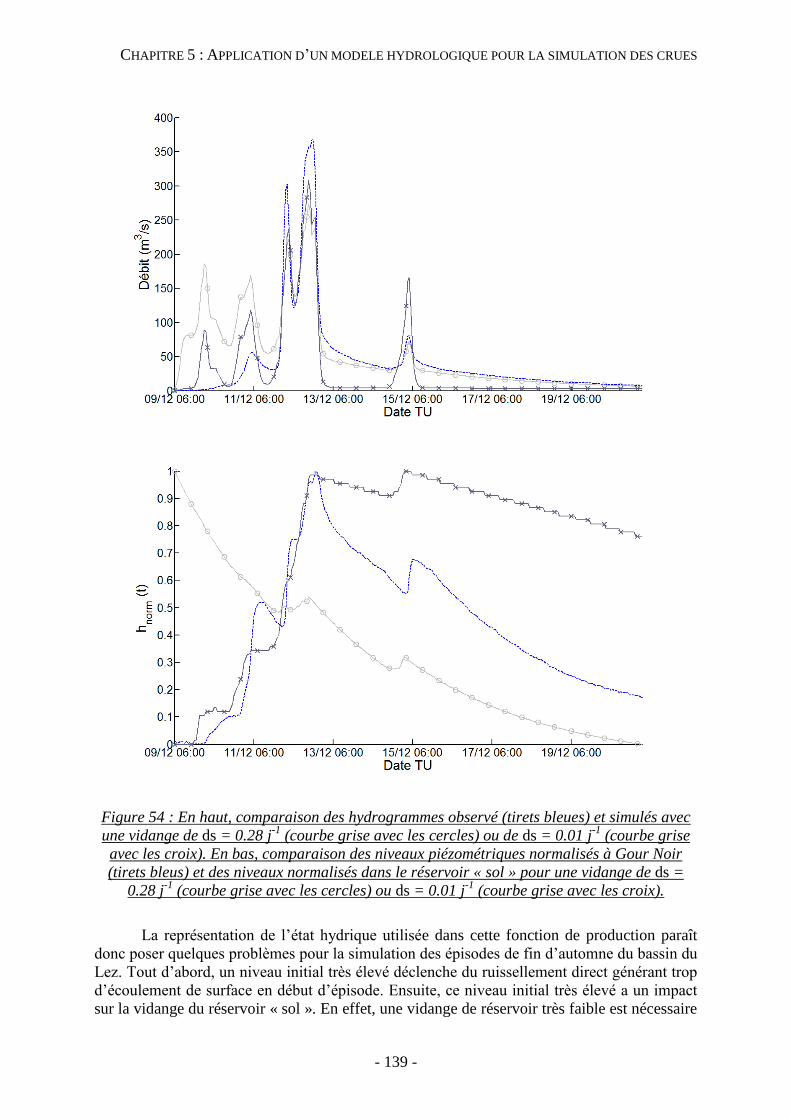
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 139 -
Figure 54 : En haut, comparaison des hydrogrammes observé (tirets bleues) et simulés avec
une vidange de ds = 0.28 j-1
(courbe grise avec les cercles) ou de ds = 0.01 j-1
(courbe grise
avec les croix). En bas, comparaison des niveaux piézométriques normalisés à Gour Noir
(tirets bleus) et des niveaux normalisés dans le réservoir « sol » pour une vidange de ds =
0.28 j-1
(courbe grise avec les cercles) ou ds = 0.01 j-1
(courbe grise avec les croix).
La représentation de l’état hydrique utilisée dans cette fonction de production paraît
donc poser quelques problèmes pour la simulation des épisodes de fin d’automne du bassin du
Lez. Tout d’abord, un niveau initial très élevé déclenche du ruissellement direct générant trop
d’écoulement de surface en début d’épisode. Ensuite, ce niveau initial très élevé a un impact
sur la vidange du réservoir « sol ». En effet, une vidange de réservoir très faible est nécessaire
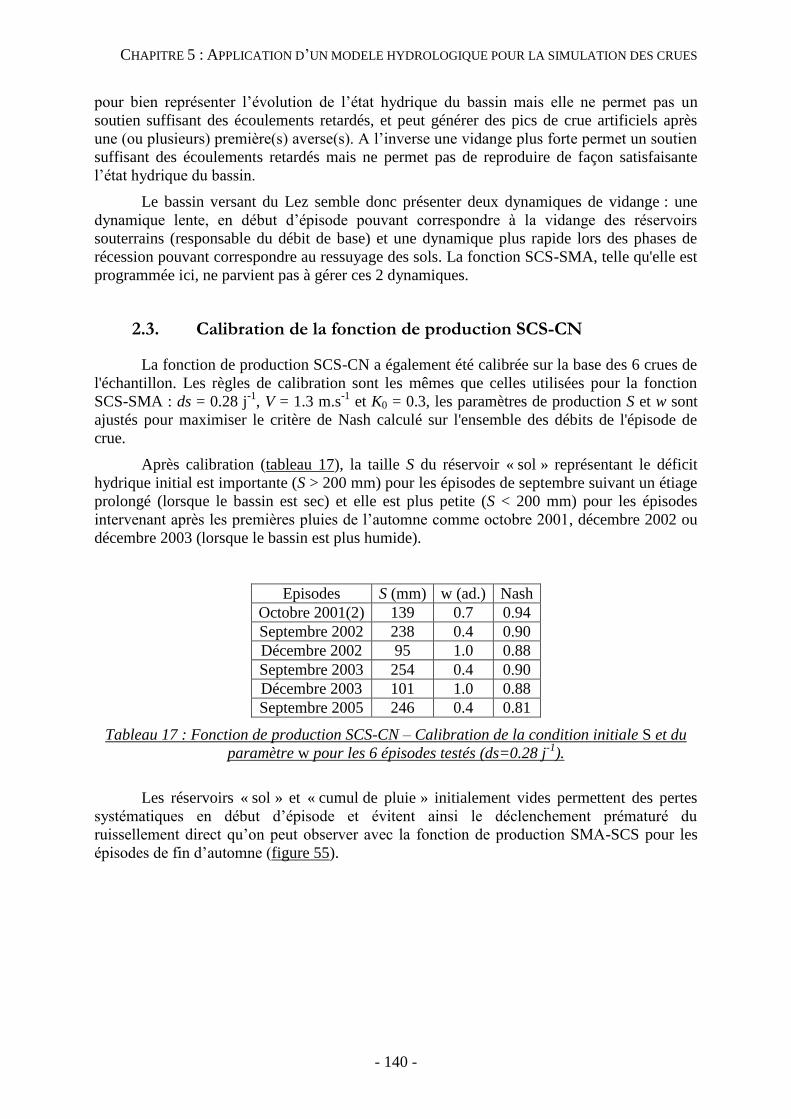
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 140 -
pour bien représenter l’évolution de l’état hydrique du bassin mais elle ne permet pas un
soutien suffisant des écoulements retardés, et peut générer des pics de crue artificiels après
une (ou plusieurs) première(s) averse(s). A l’inverse une vidange plus forte permet un soutien
suffisant des écoulements retardés mais ne permet pas de reproduire de façon satisfaisante
l’état hydrique du bassin.
Le bassin versant du Lez semble donc présenter deux dynamiques de vidange : une
dynamique lente, en début d’épisode pouvant correspondre à la vidange des réservoirs
souterrains (responsable du débit de base) et une dynamique plus rapide lors des phases de
récession pouvant correspondre au ressuyage des sols. La fonction SCS-SMA, telle qu'elle est
programmée ici, ne parvient pas à gérer ces 2 dynamiques.
2.3. Calibration de la fonction de production SCS-CN
La fonction de production SCS-CN a également été calibrée sur la base des 6 crues de
l'échantillon. Les règles de calibration sont les mêmes que celles utilisées pour la fonction
SCS-SMA : ds = 0.28 j-1
, V = 1.3 m.s-1
et K0 = 0.3, les paramètres de production S et w sont
ajustés pour maximiser le critère de Nash calculé sur l'ensemble des débits de l'épisode de
crue.
Après calibration (tableau 17), la taille S du réservoir « sol » représentant le déficit
hydrique initial est importante (S > 200 mm) pour les épisodes de septembre suivant un étiage
prolongé (lorsque le bassin est sec) et elle est plus petite (S < 200 mm) pour les épisodes
intervenant après les premières pluies de l’automne comme octobre 2001, décembre 2002 ou
décembre 2003 (lorsque le bassin est plus humide).
Episodes S (mm) w (ad.) Nash
Octobre 2001(2) 139 0.7 0.94
Septembre 2002 238 0.4 0.90
Décembre 2002 95 1.0 0.88
Septembre 2003 254 0.4 0.90
Décembre 2003 101 1.0 0.88
Septembre 2005 246 0.4 0.81
Tableau 17 : Fonction de production SCS-CN – Calibration de la condition initiale S et du
paramètre w pour les 6 épisodes testés (ds=0.28 j-1
).
Les réservoirs « sol » et « cumul de pluie » initialement vides permettent des pertes
systématiques en début d’épisode et évitent ainsi le déclenchement prématuré du
ruissellement direct qu’on peut observer avec la fonction de production SMA-SCS pour les
épisodes de fin d’automne (figure 55).
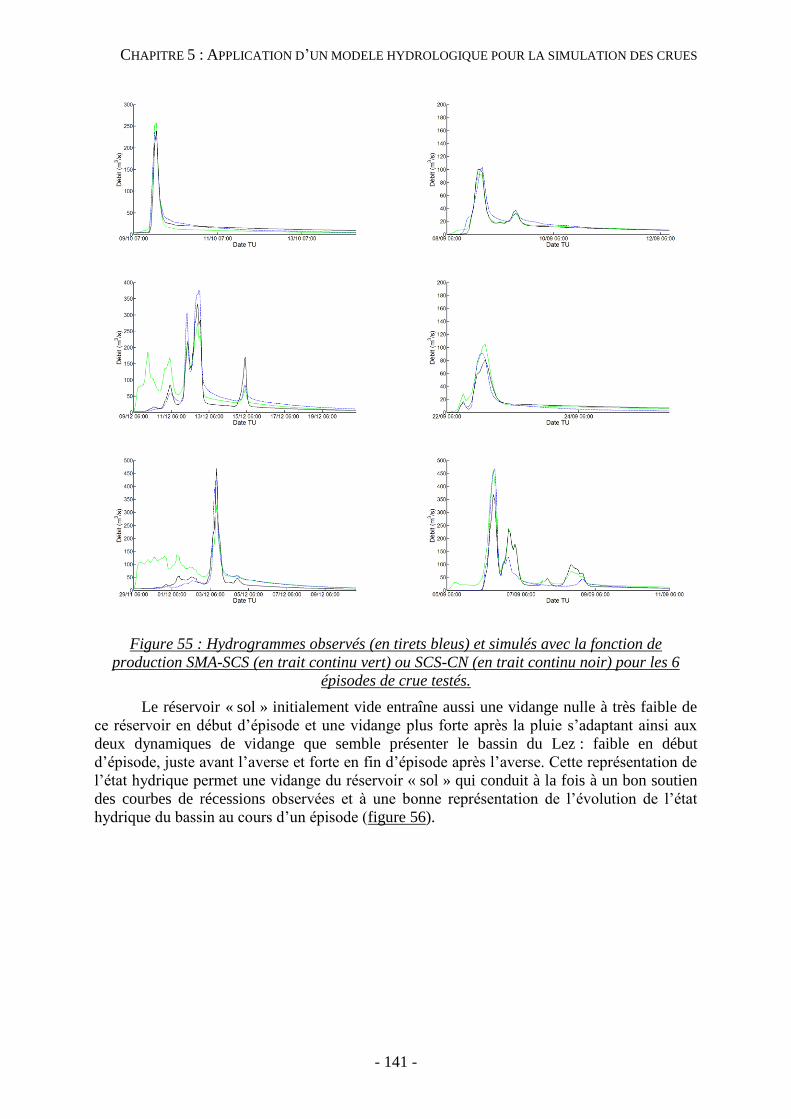
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 141 -
Figure 55 : Hydrogrammes observés (en tirets bleus) et simulés avec la fonction de
production SMA-SCS (en trait continu vert) ou SCS-CN (en trait continu noir) pour les 6
épisodes de crue testés.
Le réservoir « sol » initialement vide entraîne aussi une vidange nulle à très faible de
ce réservoir en début d’épisode et une vidange plus forte après la pluie s’adaptant ainsi aux
deux dynamiques de vidange que semble présenter le bassin du Lez : faible en début
d’épisode, juste avant l’averse et forte en fin d’épisode après l’averse. Cette représentation de
l’état hydrique permet une vidange du réservoir « sol » qui conduit à la fois à un bon soutien
des courbes de récessions observées et à une bonne représentation de l’évolution de l’état
hydrique du bassin au cours d’un épisode (figure 56).
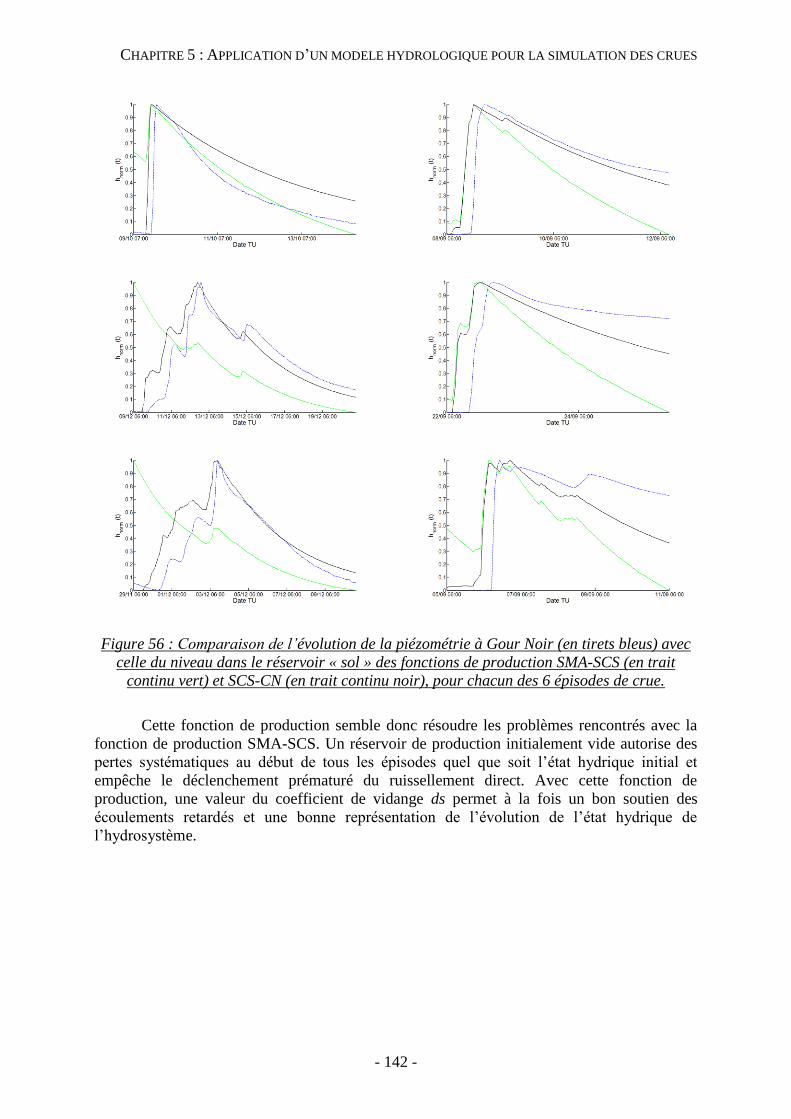
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 142 -
Figure 56 : Comparaison de l’évolution de la piézométrie à Gour Noir (en tirets bleus) avec
celle du niveau dans le réservoir « sol » des fonctions de production SMA-SCS (en trait
continu vert) et SCS-CN (en trait continu noir), pour chacun des 6 épisodes de crue.
Cette fonction de production semble donc résoudre les problèmes rencontrés avec la
fonction de production SMA-SCS. Un réservoir de production initialement vide autorise des
pertes systématiques au début de tous les épisodes quel que soit l’état hydrique initial et
empêche le déclenchement prématuré du ruissellement direct. Avec cette fonction de
production, une valeur du coefficient de vidange ds permet à la fois un bon soutien des
écoulements retardés et une bonne représentation de l’évolution de l’état hydrique de
l’hydrosystème.
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 143 -
2.4. Représentation des écoulements retardés
Quelle que soit la représentation de l’état hydrique (avec le SMA-SCS ou le SCS
instantané), la proportion de la vidange qui participe de façon retardée aux écoulements de
surface varie d’un épisode sur l’autre. Cette proportion semble dépendre de l’état hydrique
initial du bassin. En début d’automne, après la période de sécheresse estivale (septembre
2002, 2003 et 2005), 40 % au plus de la vidange participe aux écoulements de surface. En
revanche, après les premières pluies de l’automne, jusqu’à 100 % de la vidange participe aux
écoulements de surface (tableau 18). Dans cette section, le SCS-CN a été testé avec une
participation de la vidange i) constante ( = constante) ou variable et dépendante de l’état
hydrique initial du bassin ( = min(1,w/S) avec w = constante).
Episodes S (mm) Participation vidange
Variable = min(1,w/S)
Nash Participation vidange
fixe = constante
Nash
Octobre 2001(2) 139 0.7 0.94 0.6 0.93
Septembre 2002 238 0.4 0.90 0.6 0.91
Décembre 2002 95 1.0 0.88 0.6 0.84
Septembre 2003 254 0.4 0.90 0.6 0.79
Décembre 2003 101 1.0 0.88 0.6 0.86
Septembre 2005 246 0.4 0.81 0.6 0.77
Tableau 18 : Valeurs du critère de Nash pour une participation de la vidange du réservoir
« sol » fixe ou variable selon les épisodes en fonction de la condition initiale S. Lorsque est
variable w est fixé à 101 mm.
L’aménagement min(1,w/S) réalisé sur la participation de la vidange du réservoir
« sol » aux écoulements de surface permet à la vidange de varier d’un épisode sur l’autre.
Ainsi, la vidange participe à 40 % pour les épisodes de septembre pour lesquels les
écoulements retardés observés sont peu soutenus et elle participe à 100 % pour les épisodes
de décembre pour lesquels les écoulements retardés sont plus soutenus. Le modèle reflète
ainsi la variation saisonnière observée sur le soutien des écoulements retardés. Comparé à une
participation moyenne et constante de la vidange, cette participation de la vidange variable
permet d’améliorer la qualité des simulations. En effet, même si le Nash est quasi-identique
pour les épisodes d’octobre 2001 et septembre 2002, l’aménagement min(1,w/S) permet une
amélioration des Nash allant de +0.02 à +0.11 pour les épisodes de décembre 2002 et 2003 et
septembre 2003 et 2005.
La fonction de production finalement retenue est celle du SCS-CN aménagé avec une
vidange et une contribution variable min(1,w/S) de la vidange aux écoulements de surface.
Cette vidange permet à la fois de bonnes simulations de débit à l’exutoire du bassin et une
bonne représentation de l’état hydrique du bassin au cours de l’épisode tant en début
d’automne suite à un étiage prolongé qu’en fin d’automne après les premières pluies. Le
modèle complet finalement retenu possède alors 5 paramètres : S qui représente le déficit
hydrique initial de l’hydrosystème, w qui permet d’ajuster le soutien de la courbe de récession
en contrôlant la part de la vidange du réservoir « sol » qui participe aux écoulements de
surface, ds qui est le coefficient de vidange des réservoirs « cumul de pluie » et « sol », V qui
est la vitesse de transfert et K0 qui permet d’ajuster la diffusion de l’hydrogramme produit.
Ces paramètres restent constants pour l’ensemble des épisodes à l’exception de S qui varie
d’un épisode sur l’autre.
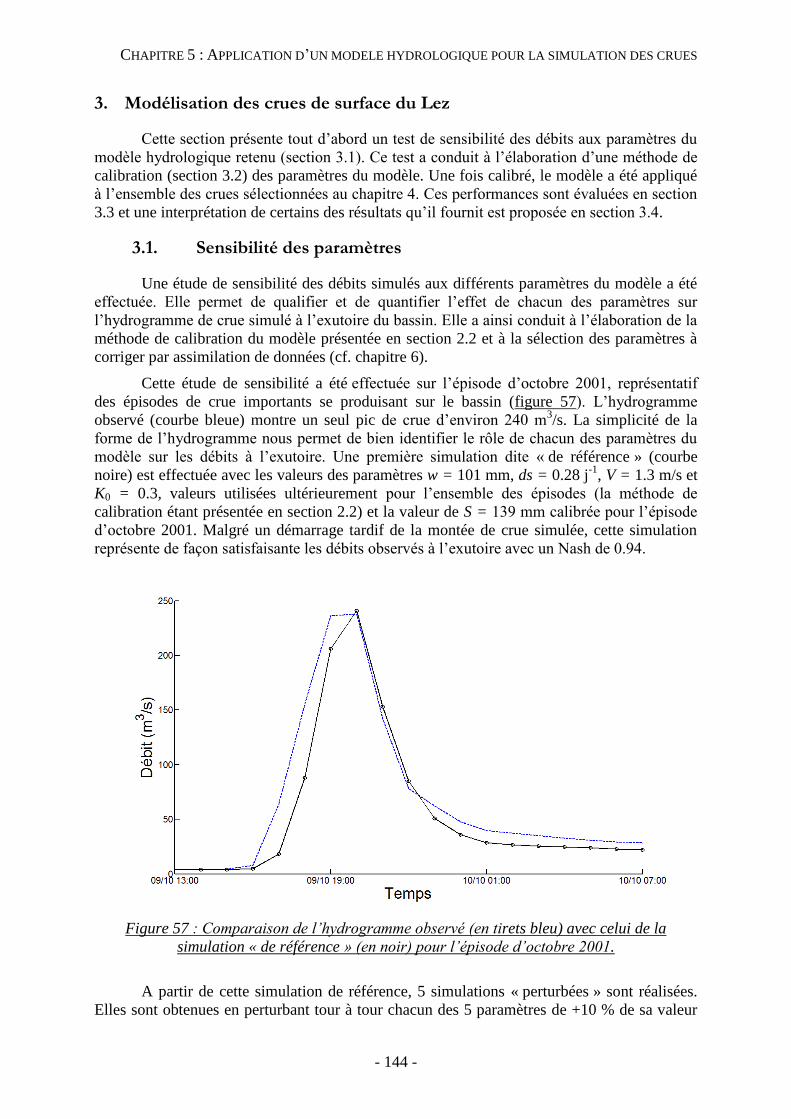
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 144 -
3. Modélisation des crues de surface du Lez
Cette section présente tout d’abord un test de sensibilité des débits aux paramètres du
modèle hydrologique retenu (section 3.1). Ce test a conduit à l’élaboration d’une méthode de
calibration (section 3.2) des paramètres du modèle. Une fois calibré, le modèle a été appliqué
à l’ensemble des crues sélectionnées au chapitre 4. Ces performances sont évaluées en section
3.3 et une interprétation de certains des résultats qu’il fournit est proposée en section 3.4.
3.1. Sensibilité des paramètres
Une étude de sensibilité des débits simulés aux différents paramètres du modèle a été
effectuée. Elle permet de qualifier et de quantifier l’effet de chacun des paramètres sur
l’hydrogramme de crue simulé à l’exutoire du bassin. Elle a ainsi conduit à l’élaboration de la
méthode de calibration du modèle présentée en section 2.2 et à la sélection des paramètres à
corriger par assimilation de données (cf. chapitre 6).
Cette étude de sensibilité a été effectuée sur l’épisode d’octobre 2001, représentatif
des épisodes de crue importants se produisant sur le bassin (figure 57). L’hydrogramme
observé (courbe bleue) montre un seul pic de crue d’environ 240 m3/s. La simplicité de la
forme de l’hydrogramme nous permet de bien identifier le rôle de chacun des paramètres du
modèle sur les débits à l’exutoire. Une première simulation dite « de référence » (courbe
noire) est effectuée avec les valeurs des paramètres w = 101 mm, ds = 0.28 j-1
, V = 1.3 m/s et
K0 = 0.3, valeurs utilisées ultérieurement pour l’ensemble des épisodes (la méthode de
calibration étant présentée en section 2.2) et la valeur de S = 139 mm calibrée pour l’épisode
d’octobre 2001. Malgré un démarrage tardif de la montée de crue simulée, cette simulation
représente de façon satisfaisante les débits observés à l’exutoire avec un Nash de 0.94.
Figure 57 : Comparaison de l’hydrogramme observé (en tirets bleu) avec celui de la
simulation « de référence » (en noir) pour l’épisode d’octobre 2001.
A partir de cette simulation de référence, 5 simulations « perturbées » sont réalisées.
Elles sont obtenues en perturbant tour à tour chacun des 5 paramètres de +10 % de sa valeur
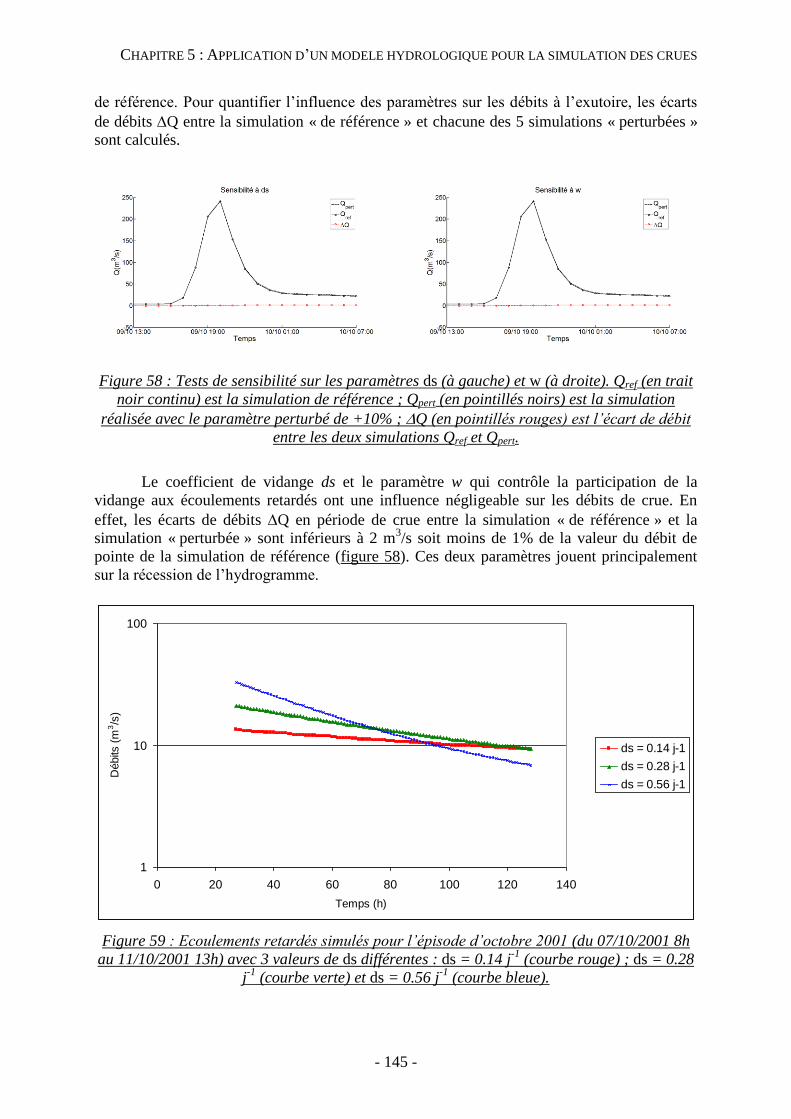
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 145 -
de référence. Pour quantifier l’influence des paramètres sur les débits à l’exutoire, les écarts
de débits Q entre la simulation « de référence » et chacune des 5 simulations « perturbées »
sont calculés.
Figure 58 : Tests de sensibilité sur les paramètres ds (à gauche) et w (à droite). Qref (en trait
noir continu) est la simulation de référence ; Qpert (en pointillés noirs) est la simulation
réalisée avec le paramètre perturbé de +10% ; Q (en pointillés rouges) est l’écart de débit
entre les deux simulations Qref et Qpert.
Le coefficient de vidange ds et le paramètre w qui contrôle la participation de la
vidange aux écoulements retardés ont une influence négligeable sur les débits de crue. En
effet, les écarts de débits Q en période de crue entre la simulation « de référence » et la
simulation « perturbée » sont inférieurs à 2 m3/s soit moins de 1% de la valeur du débit de
pointe de la simulation de référence (figure 58). Ces deux paramètres jouent principalement
sur la récession de l’hydrogramme.
Figure 59 : Ecoulements retardés simulés pour l’épisode d’octobre 2001 (du 07/10/2001 8h
au 11/10/2001 13h) avec 3 valeurs de ds différentes : ds = 0.14 j-1
(courbe rouge) ; ds = 0.28
j-1
(courbe verte) et ds = 0.56 j-1
(courbe bleue).
1
10
100
0 20 40 60 80 100 120 140
Temps (h)
Débits
(m
3/s
)
ds = 0.14 j-1
ds = 0.28 j-1
ds = 0.56 j-1
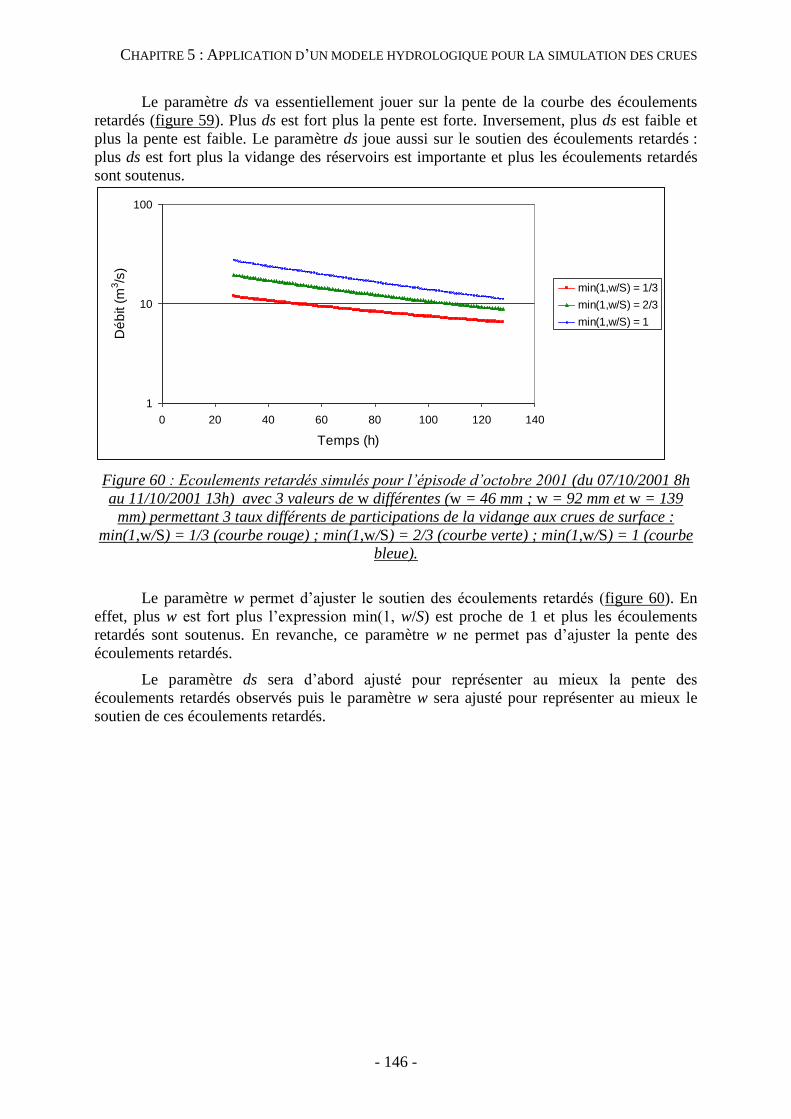
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 146 -
Le paramètre ds va essentiellement jouer sur la pente de la courbe des écoulements
retardés (figure 59). Plus ds est fort plus la pente est forte. Inversement, plus ds est faible et
plus la pente est faible. Le paramètre ds joue aussi sur le soutien des écoulements retardés :
plus ds est fort plus la vidange des réservoirs est importante et plus les écoulements retardés
sont soutenus.
Figure 60 : Ecoulements retardés simulés pour l’épisode d’octobre 2001 (du 07/10/2001 8h
au 11/10/2001 13h) avec 3 valeurs de w différentes (w = 46 mm ; w = 92 mm et w = 139
mm) permettant 3 taux différents de participations de la vidange aux crues de surface :
min(1,w/S) = 1/3 (courbe rouge) ; min(1,w/S) = 2/3 (courbe verte) ; min(1,w/S) = 1 (courbe
bleue).
Le paramètre w permet d’ajuster le soutien des écoulements retardés (figure 60). En
effet, plus w est fort plus l’expression min(1, w/S) est proche de 1 et plus les écoulements
retardés sont soutenus. En revanche, ce paramètre w ne permet pas d’ajuster la pente des
écoulements retardés.
Le paramètre ds sera d’abord ajusté pour représenter au mieux la pente des
écoulements retardés observés puis le paramètre w sera ajusté pour représenter au mieux le
soutien de ces écoulements retardés.
1
10
100
0 20 40 60 80 100 120 140
Temps (h)
Dé
bit (
m3/s
)
min(1,w/S) = 1/3
min(1,w/S) = 2/3
min(1,w/S) = 1
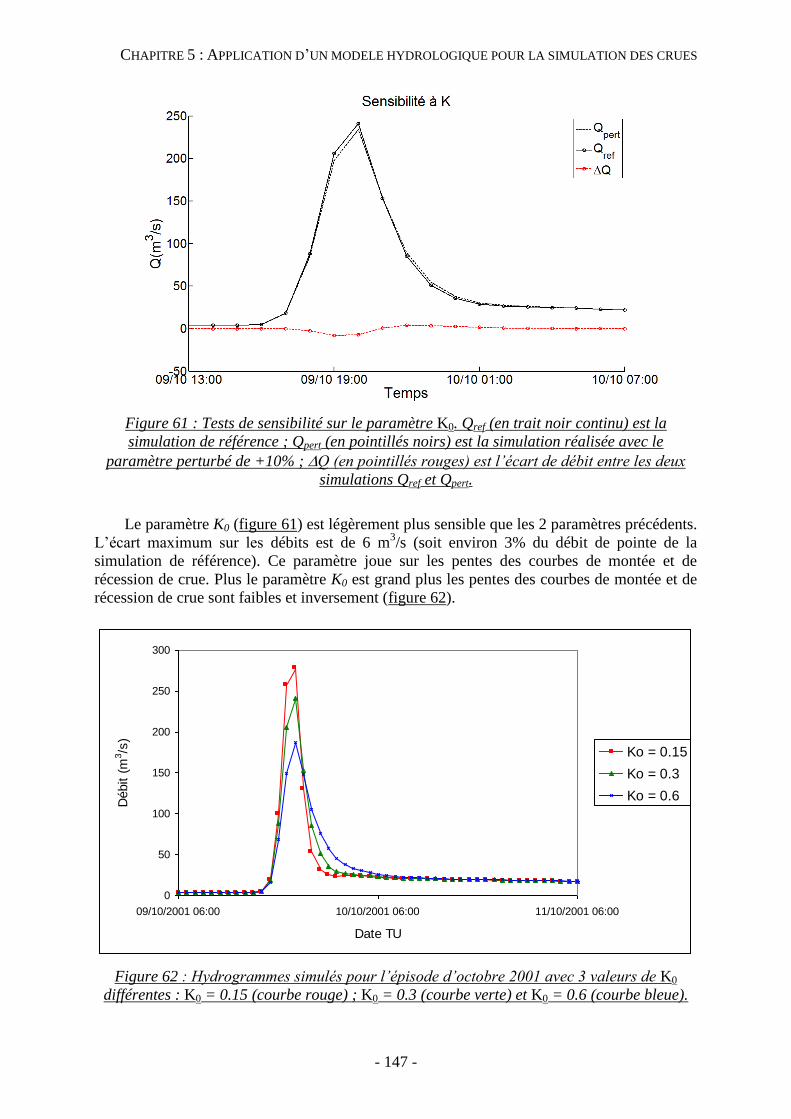
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 147 -
Figure 61 : Tests de sensibilité sur le paramètre K0. Qref (en trait noir continu) est la
simulation de référence ; Qpert (en pointillés noirs) est la simulation réalisée avec le
paramètre perturbé de +10% ; Q (en pointillés rouges) est l’écart de débit entre les deux
simulations Qref et Qpert.
Le paramètre K0 (figure 61) est légèrement plus sensible que les 2 paramètres précédents.
L’écart maximum sur les débits est de 6 m3/s (soit environ 3% du débit de pointe de la
simulation de référence). Ce paramètre joue sur les pentes des courbes de montée et de
récession de crue. Plus le paramètre K0 est grand plus les pentes des courbes de montée et de
récession de crue sont faibles et inversement (figure 62).
Figure 62 : Hydrogrammes simulés pour l’épisode d’octobre 2001 avec 3 valeurs de K0
différentes : K0 = 0.15 (courbe rouge) ; K0 = 0.3 (courbe verte) et K0 = 0.6 (courbe bleue).
0
50
100
150
200
250
300
09/10/2001 06:00 10/10/2001 06:00 11/10/2001 06:00
Date TU
Débit (
m3/s
)
Ko = 0.15
Ko = 0.3
Ko = 0.6
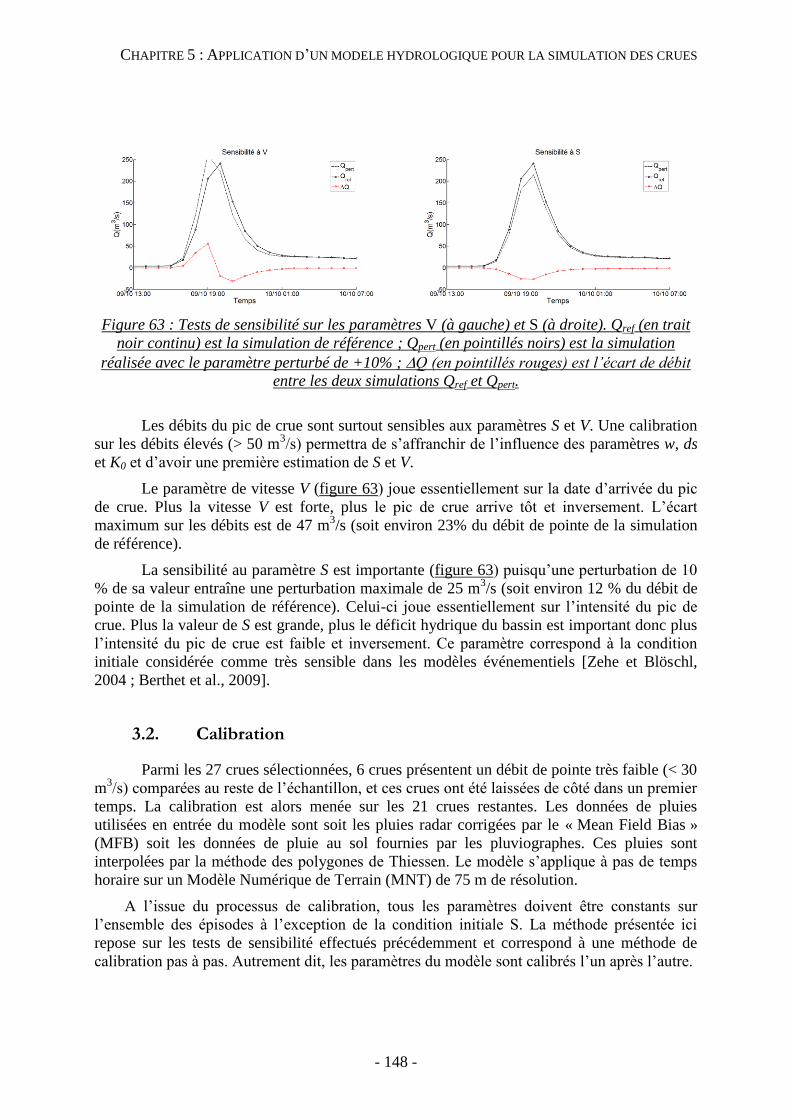
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 148 -
Figure 63 : Tests de sensibilité sur les paramètres V (à gauche) et S (à droite). Qref (en trait
noir continu) est la simulation de référence ; Qpert (en pointillés noirs) est la simulation
réalisée avec le paramètre perturbé de +10% ; Q (en pointillés rouges) est l’écart de débit
entre les deux simulations Qref et Qpert.
Les débits du pic de crue sont surtout sensibles aux paramètres S et V. Une calibration
sur les débits élevés (> 50 m3/s) permettra de s’affranchir de l’influence des paramètres w, ds
et K0 et d’avoir une première estimation de S et V.
Le paramètre de vitesse V (figure 63) joue essentiellement sur la date d’arrivée du pic
de crue. Plus la vitesse V est forte, plus le pic de crue arrive tôt et inversement. L’écart
maximum sur les débits est de 47 m3/s (soit environ 23% du débit de pointe de la simulation
de référence).
La sensibilité au paramètre S est importante (figure 63) puisqu’une perturbation de 10
% de sa valeur entraîne une perturbation maximale de 25 m3/s (soit environ 12 % du débit de
pointe de la simulation de référence). Celui-ci joue essentiellement sur l’intensité du pic de
crue. Plus la valeur de S est grande, plus le déficit hydrique du bassin est important donc plus
l’intensité du pic de crue est faible et inversement. Ce paramètre correspond à la condition
initiale considérée comme très sensible dans les modèles événementiels [Zehe et Blöschl,
2004 ; Berthet et al., 2009].
3.2. Calibration
Parmi les 27 crues sélectionnées, 6 crues présentent un débit de pointe très faible (< 30
m3/s) comparées au reste de l’échantillon, et ces crues ont été laissées de côté dans un premier
temps. La calibration est alors menée sur les 21 crues restantes. Les données de pluies
utilisées en entrée du modèle sont soit les pluies radar corrigées par le « Mean Field Bias »
(MFB) soit les données de pluie au sol fournies par les pluviographes. Ces pluies sont
interpolées par la méthode des polygones de Thiessen. Le modèle s’applique à pas de temps
horaire sur un Modèle Numérique de Terrain (MNT) de 75 m de résolution.
A l’issue du processus de calibration, tous les paramètres doivent être constants sur
l’ensemble des épisodes à l’exception de la condition initiale S. La méthode présentée ici
repose sur les tests de sensibilité effectués précédemment et correspond à une méthode de
calibration pas à pas. Autrement dit, les paramètres du modèle sont calibrés l’un après l’autre.
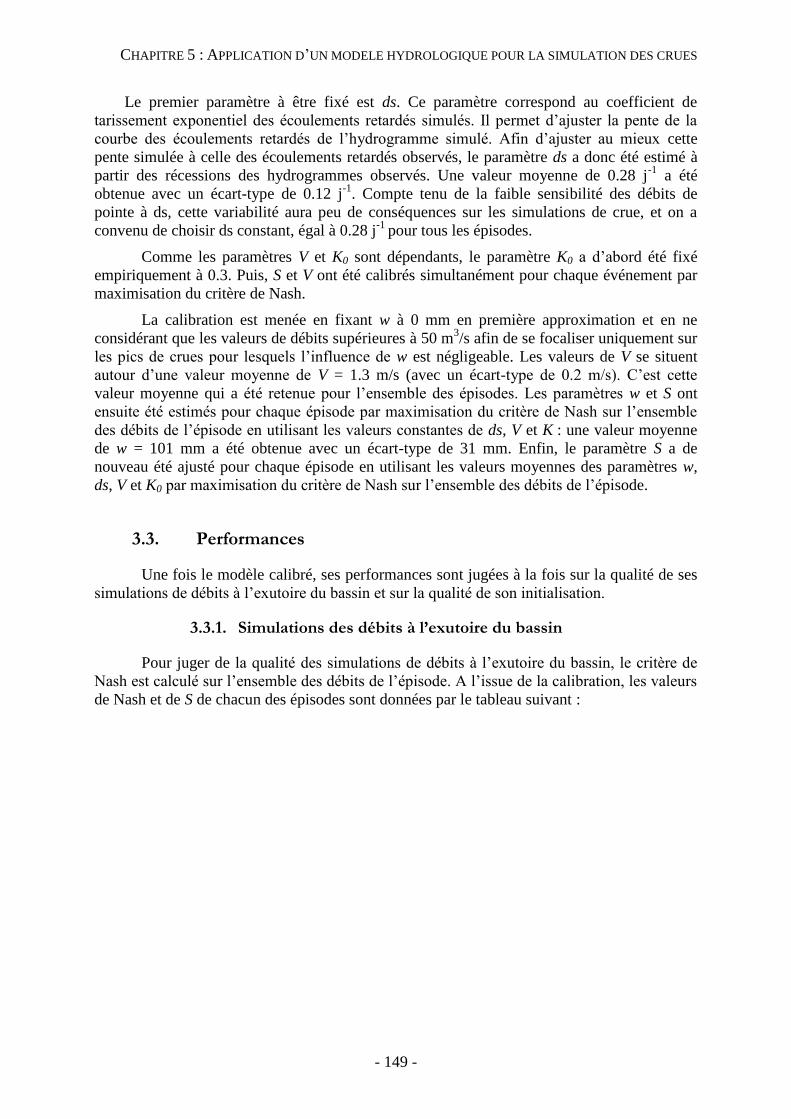
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 149 -
Le premier paramètre à être fixé est ds. Ce paramètre correspond au coefficient de
tarissement exponentiel des écoulements retardés simulés. Il permet d’ajuster la pente de la
courbe des écoulements retardés de l’hydrogramme simulé. Afin d’ajuster au mieux cette
pente simulée à celle des écoulements retardés observés, le paramètre ds a donc été estimé à
partir des récessions des hydrogrammes observés. Une valeur moyenne de 0.28 j-1
a été
obtenue avec un écart-type de 0.12 j-1
. Compte tenu de la faible sensibilité des débits de
pointe à ds, cette variabilité aura peu de conséquences sur les simulations de crue, et on a
convenu de choisir ds constant, égal à 0.28 j-1
pour tous les épisodes.
Comme les paramètres V et K0 sont dépendants, le paramètre K0 a d’abord été fixé
empiriquement à 0.3. Puis, S et V ont été calibrés simultanément pour chaque événement par
maximisation du critère de Nash.
La calibration est menée en fixant w à 0 mm en première approximation et en ne
considérant que les valeurs de débits supérieures à 50 m3/s afin de se focaliser uniquement sur
les pics de crues pour lesquels l’influence de w est négligeable. Les valeurs de V se situent
autour d’une valeur moyenne de V = 1.3 m/s (avec un écart-type de 0.2 m/s). C’est cette
valeur moyenne qui a été retenue pour l’ensemble des épisodes. Les paramètres w et S ont
ensuite été estimés pour chaque épisode par maximisation du critère de Nash sur l’ensemble
des débits de l’épisode en utilisant les valeurs constantes de ds, V et K : une valeur moyenne
de w = 101 mm a été obtenue avec un écart-type de 31 mm. Enfin, le paramètre S a de
nouveau été ajusté pour chaque épisode en utilisant les valeurs moyennes des paramètres w,
ds, V et K0 par maximisation du critère de Nash sur l’ensemble des débits de l’épisode.
3.3. Performances
Une fois le modèle calibré, ses performances sont jugées à la fois sur la qualité de ses
simulations de débits à l’exutoire du bassin et sur la qualité de son initialisation.
3.3.1. Simulations des débits à l’exutoire du bassin
Pour juger de la qualité des simulations de débits à l’exutoire du bassin, le critère de
Nash est calculé sur l’ensemble des débits de l’épisode. A l’issue de la calibration, les valeurs
de Nash et de S de chacun des épisodes sont données par le tableau suivant :
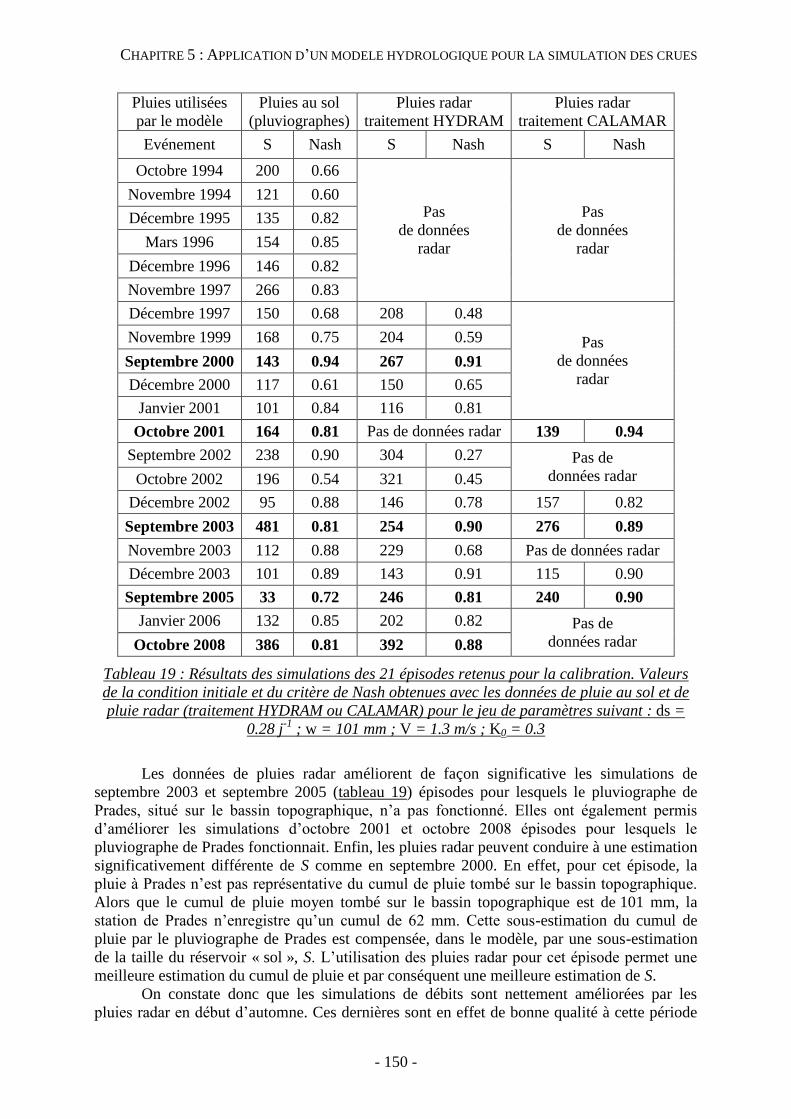
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 150 -
Pluies utilisées
par le modèle
Pluies au sol
(pluviographes)
Pluies radar
traitement HYDRAM
Pluies radar
traitement CALAMAR
Evénement S Nash S Nash S Nash
Octobre 1994 200 0.66
Pas
de données
radar
Pas
de données
radar
Novembre 1994 121 0.60
Décembre 1995 135 0.82
Mars 1996 154 0.85
Décembre 1996 146 0.82
Novembre 1997 266 0.83
Décembre 1997 150 0.68 208 0.48
Pas
de données
radar
Novembre 1999 168 0.75 204 0.59
Septembre 2000 143 0.94 267 0.91
Décembre 2000 117 0.61 150 0.65
Janvier 2001 101 0.84 116 0.81
Octobre 2001 164 0.81 Pas de données radar 139 0.94
Septembre 2002 238 0.90 304 0.27 Pas de
données radar Octobre 2002 196 0.54 321 0.45
Décembre 2002 95 0.88 146 0.78 157 0.82
Septembre 2003 481 0.81 254 0.90 276 0.89
Novembre 2003 112 0.88 229 0.68 Pas de données radar
Décembre 2003 101 0.89 143 0.91 115 0.90
Septembre 2005 33 0.72 246 0.81 240 0.90
Janvier 2006 132 0.85 202 0.82 Pas de
données radar Octobre 2008 386 0.81 392 0.88
Tableau 19 : Résultats des simulations des 21 épisodes retenus pour la calibration. Valeurs
de la condition initiale et du critère de Nash obtenues avec les données de pluie au sol et de
pluie radar (traitement HYDRAM ou CALAMAR) pour le jeu de paramètres suivant : ds =
0.28 j-1
; w = 101 mm ; V = 1.3 m/s ; K0 = 0.3
Les données de pluies radar améliorent de façon significative les simulations de
septembre 2003 et septembre 2005 (tableau 19) épisodes pour lesquels le pluviographe de
Prades, situé sur le bassin topographique, n’a pas fonctionné. Elles ont également permis
d’améliorer les simulations d’octobre 2001 et octobre 2008 épisodes pour lesquels le
pluviographe de Prades fonctionnait. Enfin, les pluies radar peuvent conduire à une estimation
significativement différente de S comme en septembre 2000. En effet, pour cet épisode, la
pluie à Prades n’est pas représentative du cumul de pluie tombé sur le bassin topographique.
Alors que le cumul de pluie moyen tombé sur le bassin topographique est de 101 mm, la
station de Prades n’enregistre qu’un cumul de 62 mm. Cette sous-estimation du cumul de
pluie par le pluviographe de Prades est compensée, dans le modèle, par une sous-estimation
de la taille du réservoir « sol », S. L’utilisation des pluies radar pour cet épisode permet une
meilleure estimation du cumul de pluie et par conséquent une meilleure estimation de S.
On constate donc que les simulations de débits sont nettement améliorées par les
pluies radar en début d’automne. Ces dernières sont en effet de bonne qualité à cette période
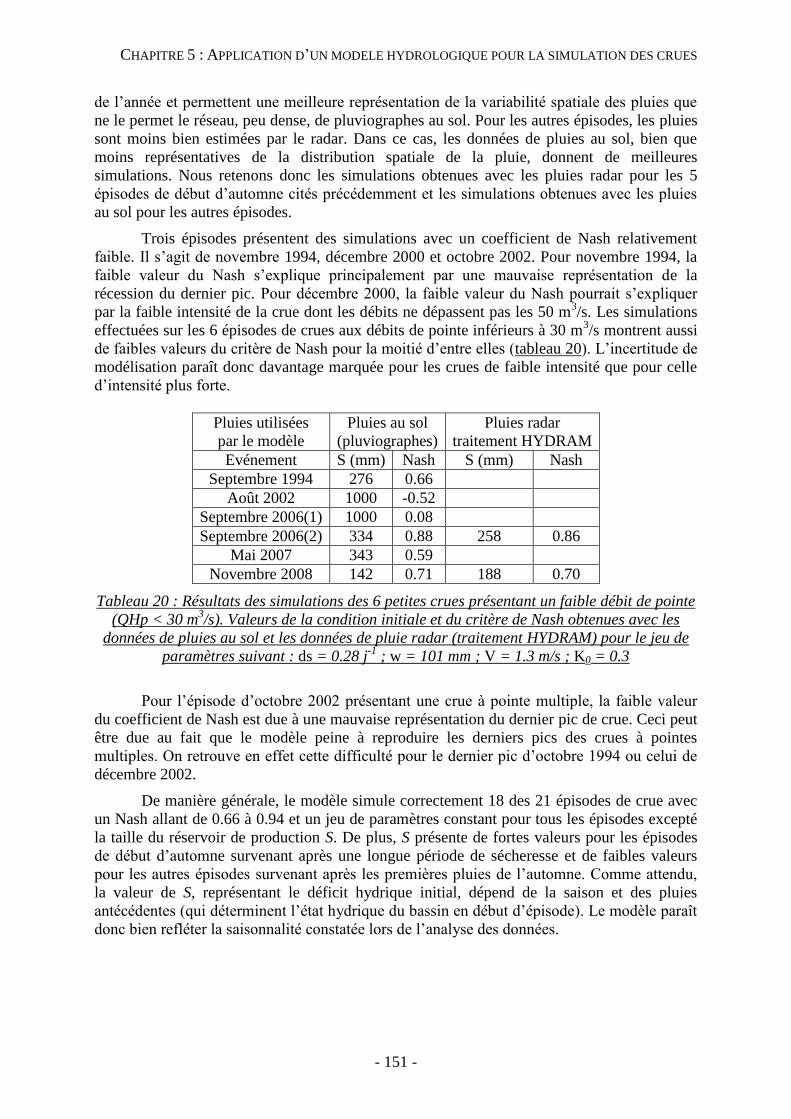
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 151 -
de l’année et permettent une meilleure représentation de la variabilité spatiale des pluies que
ne le permet le réseau, peu dense, de pluviographes au sol. Pour les autres épisodes, les pluies
sont moins bien estimées par le radar. Dans ce cas, les données de pluies au sol, bien que
moins représentatives de la distribution spatiale de la pluie, donnent de meilleures
simulations. Nous retenons donc les simulations obtenues avec les pluies radar pour les 5
épisodes de début d’automne cités précédemment et les simulations obtenues avec les pluies
au sol pour les autres épisodes.
Trois épisodes présentent des simulations avec un coefficient de Nash relativement
faible. Il s’agit de novembre 1994, décembre 2000 et octobre 2002. Pour novembre 1994, la
faible valeur du Nash s’explique principalement par une mauvaise représentation de la
récession du dernier pic. Pour décembre 2000, la faible valeur du Nash pourrait s’expliquer
par la faible intensité de la crue dont les débits ne dépassent pas les 50 m3/s. Les simulations
effectuées sur les 6 épisodes de crues aux débits de pointe inférieurs à 30 m3/s montrent aussi
de faibles valeurs du critère de Nash pour la moitié d’entre elles (tableau 20). L’incertitude de
modélisation paraît donc davantage marquée pour les crues de faible intensité que pour celle
d’intensité plus forte.
Pluies utilisées
par le modèle
Pluies au sol
(pluviographes)
Pluies radar
traitement HYDRAM
Evénement S (mm) Nash S (mm) Nash
Septembre 1994 276 0.66
Août 2002 1000 -0.52
Septembre 2006(1) 1000 0.08
Septembre 2006(2) 334 0.88 258 0.86
Mai 2007 343 0.59
Novembre 2008 142 0.71 188 0.70
Tableau 20 : Résultats des simulations des 6 petites crues présentant un faible débit de pointe
(QHp < 30 m3/s). Valeurs de la condition initiale et du critère de Nash obtenues avec les
données de pluies au sol et les données de pluie radar (traitement HYDRAM) pour le jeu de
paramètres suivant : ds = 0.28 j-1
; w = 101 mm ; V = 1.3 m/s ; K0 = 0.3
Pour l’épisode d’octobre 2002 présentant une crue à pointe multiple, la faible valeur
du coefficient de Nash est due à une mauvaise représentation du dernier pic de crue. Ceci peut
être due au fait que le modèle peine à reproduire les derniers pics des crues à pointes
multiples. On retrouve en effet cette difficulté pour le dernier pic d’octobre 1994 ou celui de
décembre 2002.
De manière générale, le modèle simule correctement 18 des 21 épisodes de crue avec
un Nash allant de 0.66 à 0.94 et un jeu de paramètres constant pour tous les épisodes excepté
la taille du réservoir de production S. De plus, S présente de fortes valeurs pour les épisodes
de début d’automne survenant après une longue période de sécheresse et de faibles valeurs
pour les autres épisodes survenant après les premières pluies de l’automne. Comme attendu,
la valeur de S, représentant le déficit hydrique initial, dépend de la saison et des pluies
antécédentes (qui déterminent l’état hydrique du bassin en début d’épisode). Le modèle paraît
donc bien refléter la saisonnalité constatée lors de l’analyse des données.
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 152 -
3.3.2. Initialisation du modèle événementiel
Afin d’initialiser ce modèle événementiel, les valeurs calibrées de S qui représentent le
déficit hydrique initial ont été corrélées aux indicateurs de l’état hydrique de l’hydrosystème
pris en début d’épisode à 6h00 TU. Ces indicateurs, présentés au chapitre 4, sont l’indicateur
d’humidité Hu2 moyenné sur le bassin topographique permettant d’avoir une idée de la
saturation des sols et la piézométrie de l’aquifère du Lez permettant d’estimer l’état de
remplissage du réservoir profond.
Figure 64 : Régression linéaire établie entre la valeur calibrée de la condition initiale du
modèle S et la valeur de l’indice Hu2 pris en début d’épisode.
Une régression linéaire a été établie entre l’indicateur Hu2 et la condition initiale du
modèle S (figure 64). Le coefficient de détermination R2 est de 0.69. D’après le test de
conformité du coefficient de corrélation, cette régression est significative à un seuil
inférieur à 0.05.
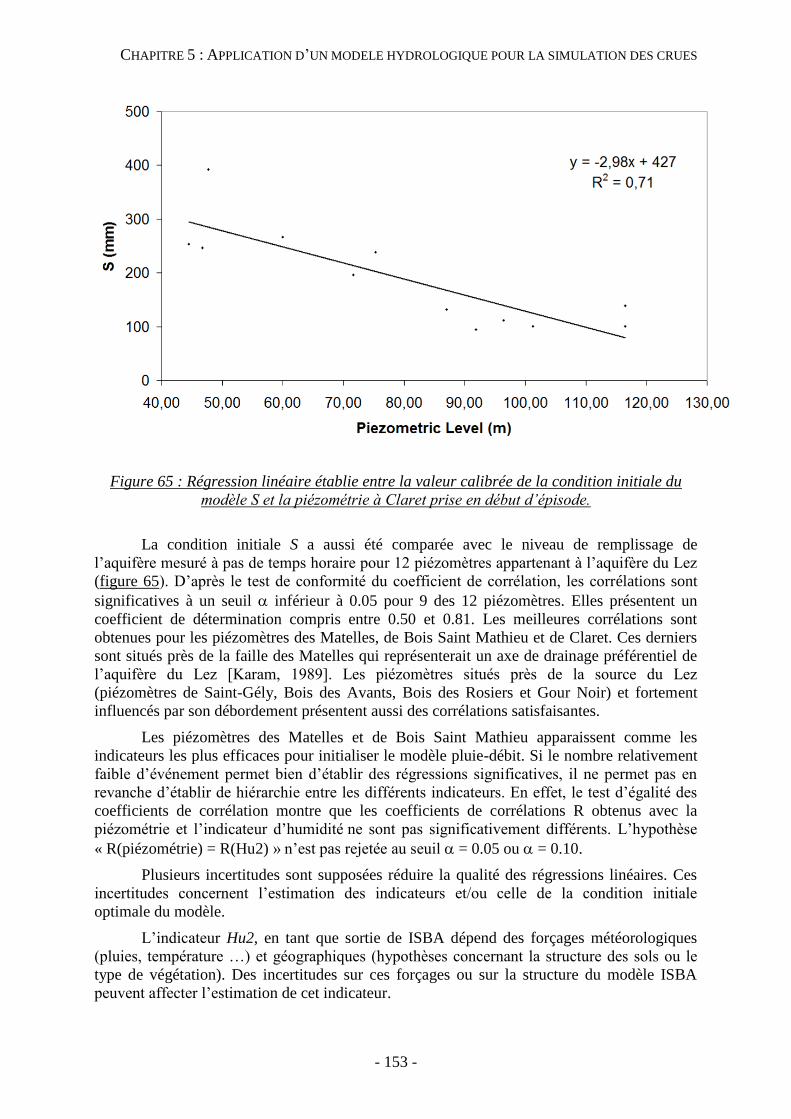
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 153 -
Figure 65 : Régression linéaire établie entre la valeur calibrée de la condition initiale du
modèle S et la piézométrie à Claret prise en début d’épisode.
La condition initiale S a aussi été comparée avec le niveau de remplissage de
l’aquifère mesuré à pas de temps horaire pour 12 piézomètres appartenant à l’aquifère du Lez
(figure 65). D’après le test de conformité du coefficient de corrélation, les corrélations sont
significatives à un seuil inférieur à 0.05 pour 9 des 12 piézomètres. Elles présentent un
coefficient de détermination compris entre 0.50 et 0.81. Les meilleures corrélations sont
obtenues pour les piézomètres des Matelles, de Bois Saint Mathieu et de Claret. Ces derniers
sont situés près de la faille des Matelles qui représenterait un axe de drainage préférentiel de
l’aquifère du Lez [Karam, 1989]. Les piézomètres situés près de la source du Lez
(piézomètres de Saint-Gély, Bois des Avants, Bois des Rosiers et Gour Noir) et fortement
influencés par son débordement présentent aussi des corrélations satisfaisantes.
Les piézomètres des Matelles et de Bois Saint Mathieu apparaissent comme les
indicateurs les plus efficaces pour initialiser le modèle pluie-débit. Si le nombre relativement
faible d’événement permet bien d’établir des régressions significatives, il ne permet pas en
revanche d’établir de hiérarchie entre les différents indicateurs. En effet, le test d’égalité des
coefficients de corrélation montre que les coefficients de corrélations R obtenus avec la
piézométrie et l’indicateur d’humidité ne sont pas significativement différents. L’hypothèse
« R(piézométrie) = R(Hu2) » n’est pas rejetée au seuil = 0.05 ou = 0.10.
Plusieurs incertitudes sont supposées réduire la qualité des régressions linéaires. Ces
incertitudes concernent l’estimation des indicateurs et/ou celle de la condition initiale
optimale du modèle.
L’indicateur Hu2, en tant que sortie de ISBA dépend des forçages météorologiques
(pluies, température …) et géographiques (hypothèses concernant la structure des sols ou le
type de végétation). Des incertitudes sur ces forçages ou sur la structure du modèle ISBA
peuvent affecter l’estimation de cet indicateur.
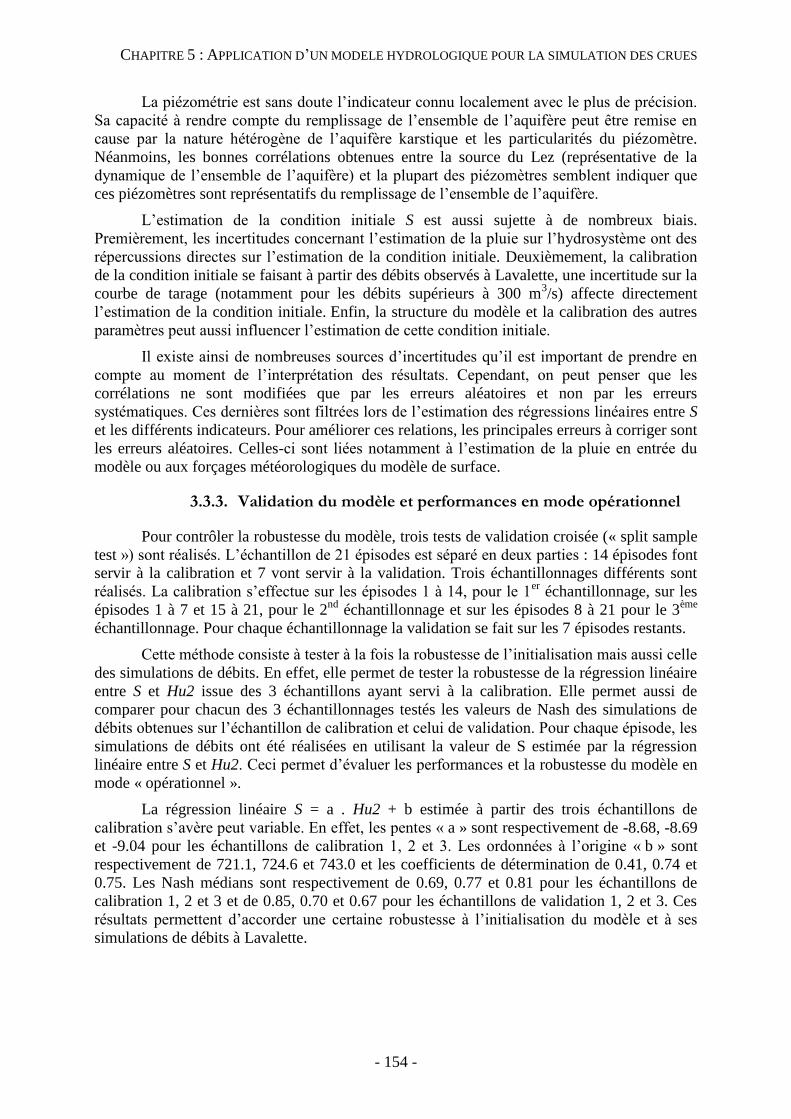
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 154 -
La piézométrie est sans doute l’indicateur connu localement avec le plus de précision.
Sa capacité à rendre compte du remplissage de l’ensemble de l’aquifère peut être remise en
cause par la nature hétérogène de l’aquifère karstique et les particularités du piézomètre.
Néanmoins, les bonnes corrélations obtenues entre la source du Lez (représentative de la
dynamique de l’ensemble de l’aquifère) et la plupart des piézomètres semblent indiquer que
ces piézomètres sont représentatifs du remplissage de l’ensemble de l’aquifère.
L’estimation de la condition initiale S est aussi sujette à de nombreux biais.
Premièrement, les incertitudes concernant l’estimation de la pluie sur l’hydrosystème ont des
répercussions directes sur l’estimation de la condition initiale. Deuxièmement, la calibration
de la condition initiale se faisant à partir des débits observés à Lavalette, une incertitude sur la
courbe de tarage (notamment pour les débits supérieurs à 300 m3/s) affecte directement
l’estimation de la condition initiale. Enfin, la structure du modèle et la calibration des autres
paramètres peut aussi influencer l’estimation de cette condition initiale.
Il existe ainsi de nombreuses sources d’incertitudes qu’il est important de prendre en
compte au moment de l’interprétation des résultats. Cependant, on peut penser que les
corrélations ne sont modifiées que par les erreurs aléatoires et non par les erreurs
systématiques. Ces dernières sont filtrées lors de l’estimation des régressions linéaires entre S
et les différents indicateurs. Pour améliorer ces relations, les principales erreurs à corriger sont
les erreurs aléatoires. Celles-ci sont liées notamment à l’estimation de la pluie en entrée du
modèle ou aux forçages météorologiques du modèle de surface.
3.3.3. Validation du modèle et performances en mode opérationnel
Pour contrôler la robustesse du modèle, trois tests de validation croisée (« split sample
test ») sont réalisés. L’échantillon de 21 épisodes est séparé en deux parties : 14 épisodes font
servir à la calibration et 7 vont servir à la validation. Trois échantillonnages différents sont
réalisés. La calibration s’effectue sur les épisodes 1 à 14, pour le 1er
échantillonnage, sur les
épisodes 1 à 7 et 15 à 21, pour le 2nd
échantillonnage et sur les épisodes 8 à 21 pour le 3ème
échantillonnage. Pour chaque échantillonnage la validation se fait sur les 7 épisodes restants.
Cette méthode consiste à tester à la fois la robustesse de l’initialisation mais aussi celle
des simulations de débits. En effet, elle permet de tester la robustesse de la régression linéaire
entre S et Hu2 issue des 3 échantillons ayant servi à la calibration. Elle permet aussi de
comparer pour chacun des 3 échantillonnages testés les valeurs de Nash des simulations de
débits obtenues sur l’échantillon de calibration et celui de validation. Pour chaque épisode, les
simulations de débits ont été réalisées en utilisant la valeur de S estimée par la régression
linéaire entre S et Hu2. Ceci permet d’évaluer les performances et la robustesse du modèle en
mode « opérationnel ».
La régression linéaire S = a . Hu2 + b estimée à partir des trois échantillons de
calibration s’avère peut variable. En effet, les pentes « a » sont respectivement de -8.68, -8.69
et -9.04 pour les échantillons de calibration 1, 2 et 3. Les ordonnées à l’origine « b » sont
respectivement de 721.1, 724.6 et 743.0 et les coefficients de détermination de 0.41, 0.74 et
0.75. Les Nash médians sont respectivement de 0.69, 0.77 et 0.81 pour les échantillons de
calibration 1, 2 et 3 et de 0.85, 0.70 et 0.67 pour les échantillons de validation 1, 2 et 3. Ces
résultats permettent d’accorder une certaine robustesse à l’initialisation du modèle et à ses
simulations de débits à Lavalette.
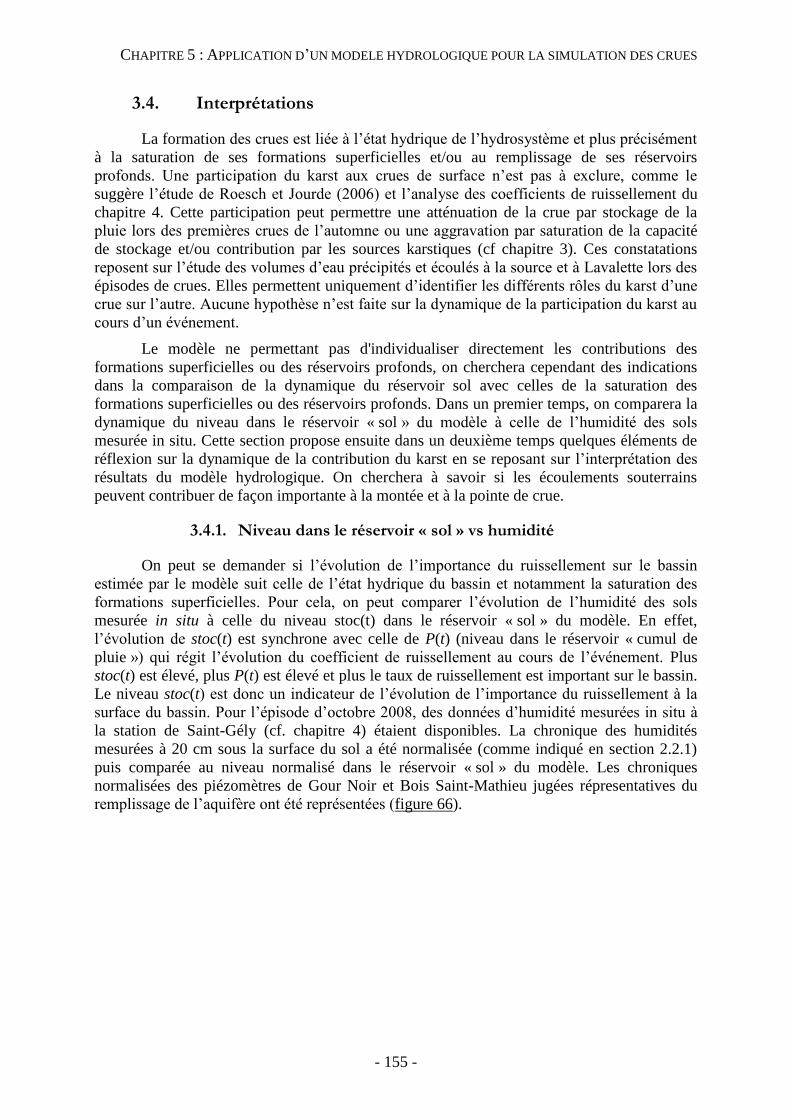
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 155 -
3.4. Interprétations
La formation des crues est liée à l’état hydrique de l’hydrosystème et plus précisément
à la saturation de ses formations superficielles et/ou au remplissage de ses réservoirs
profonds. Une participation du karst aux crues de surface n’est pas à exclure, comme le
suggère l’étude de Roesch et Jourde (2006) et l’analyse des coefficients de ruissellement du
chapitre 4. Cette participation peut permettre une atténuation de la crue par stockage de la
pluie lors des premières crues de l’automne ou une aggravation par saturation de la capacité
de stockage et/ou contribution par les sources karstiques (cf chapitre 3). Ces constatations
reposent sur l’étude des volumes d’eau précipités et écoulés à la source et à Lavalette lors des
épisodes de crues. Elles permettent uniquement d’identifier les différents rôles du karst d’une
crue sur l’autre. Aucune hypothèse n’est faite sur la dynamique de la participation du karst au
cours d’un événement.
Le modèle ne permettant pas d'individualiser directement les contributions des
formations superficielles ou des réservoirs profonds, on cherchera cependant des indications
dans la comparaison de la dynamique du réservoir sol avec celles de la saturation des
formations superficielles ou des réservoirs profonds. Dans un premier temps, on comparera la
dynamique du niveau dans le réservoir « sol » du modèle à celle de l’humidité des sols
mesurée in situ. Cette section propose ensuite dans un deuxième temps quelques éléments de
réflexion sur la dynamique de la contribution du karst en se reposant sur l’interprétation des
résultats du modèle hydrologique. On cherchera à savoir si les écoulements souterrains
peuvent contribuer de façon importante à la montée et à la pointe de crue.
3.4.1. Niveau dans le réservoir « sol » vs humidité
On peut se demander si l’évolution de l’importance du ruissellement sur le bassin
estimée par le modèle suit celle de l’état hydrique du bassin et notamment la saturation des
formations superficielles. Pour cela, on peut comparer l’évolution de l’humidité des sols
mesurée in situ à celle du niveau stoc(t) dans le réservoir « sol » du modèle. En effet,
l’évolution de stoc(t) est synchrone avec celle de P(t) (niveau dans le réservoir « cumul de
pluie ») qui régit l’évolution du coefficient de ruissellement au cours de l’événement. Plus
stoc(t) est élevé, plus P(t) est élevé et plus le taux de ruissellement est important sur le bassin.
Le niveau stoc(t) est donc un indicateur de l’évolution de l’importance du ruissellement à la
surface du bassin. Pour l’épisode d’octobre 2008, des données d’humidité mesurées in situ à
la station de Saint-Gély (cf. chapitre 4) étaient disponibles. La chronique des humidités
mesurées à 20 cm sous la surface du sol a été normalisée (comme indiqué en section 2.2.1)
puis comparée au niveau normalisé dans le réservoir « sol » du modèle. Les chroniques
normalisées des piézomètres de Gour Noir et Bois Saint-Mathieu jugées répresentatives du
remplissage de l’aquifère ont été représentées (figure 66).
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 156 -
Figure 66 : Comparaison du niveau dans le réservoir « sol » du modèle (en noir) à l’humidité
à 20 cm mesurée in situ à la station de Saint-Gély (en tirets verts) ou à la piézométrie
mesurée à Gour Noir (en tirets bleus) ou Bois Saint-Mathieu (tirets rouges) pour l’épisode
d’octobre 2008.
La comparaison des deux chroniques indique que le niveau stoc(t) et l’humidité
mesurée in situ réagissent de façon synchrone. Il n’existe pas de décalage entre les deux
chroniques. Ce n’est pas le cas des chroniques des deux piézomètres qui accusent un retard de
quelques heures (3 h) pour Gour Noir à quelques jours pour Bois Saint-Mathieu. Ceci laisse
penser que la saturation des formations superficielles joue un rôle essentiel dans la formation
des crues du Lez à Lavalette, le remplissage des réservoirs karstiques instrumentés
intervenant plus tardivement. Pour être généralisé, ce résultat devra être validé sur d’autres
épisodes (postérieurs à 2008, date d’installation des sondes d’humidité) et d’autres stations de
mesure d’humidité in situ (Notre-Dame-des-Champs, Triadou, Restinclières, cf. chapitre 4).
3.4.2. Niveau dans le réservoir « sol » vs piézométrie
On peut d’abord se demander si le karst peut aggraver la crue de surface par saturation
de la capacité de stockage dès le début de l’épisode. Pour répondre à cette question, on peut
comparer l’évolution du niveau piézométrique à celle du niveau stoc(t) dans le réservoir
« sol » du modèle. Son évolution sera comparée à celle d’un piézomètre appartenant à
l’aquifère du Lez. Le piézomètre choisi pour cette comparaison est celui de Gour Noir.
Présentant une bonne corrélation avec la source, il peut être considéré comme représentatif de
l’évolution de l’état de remplissage de l’aquifère du Lez. De plus, il est situé sur le bassin
topographique : un débordement du karst à cet endroit peut donc entraîner une contribution du
karst aux débits à Lavalette par saturation de sa capacité de stockage.
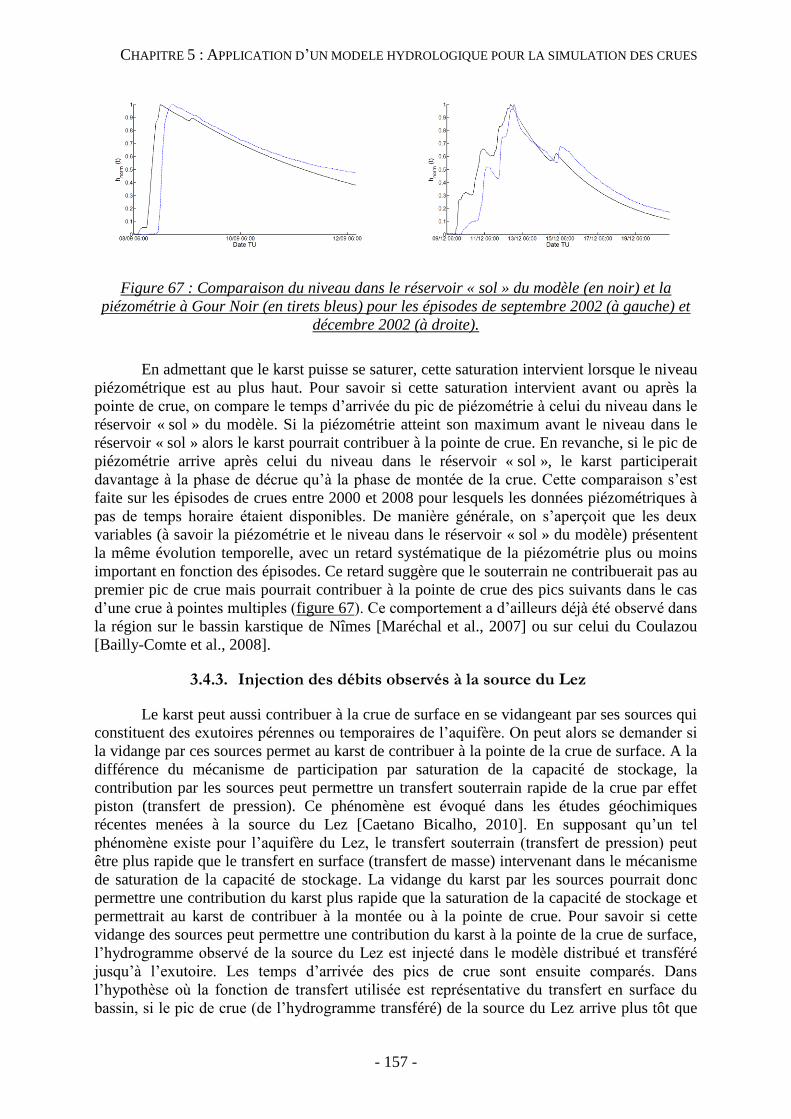
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 157 -
Figure 67 : Comparaison du niveau dans le réservoir « sol » du modèle (en noir) et la
piézométrie à Gour Noir (en tirets bleus) pour les épisodes de septembre 2002 (à gauche) et
décembre 2002 (à droite).
En admettant que le karst puisse se saturer, cette saturation intervient lorsque le niveau
piézométrique est au plus haut. Pour savoir si cette saturation intervient avant ou après la
pointe de crue, on compare le temps d’arrivée du pic de piézométrie à celui du niveau dans le
réservoir « sol » du modèle. Si la piézométrie atteint son maximum avant le niveau dans le
réservoir « sol » alors le karst pourrait contribuer à la pointe de crue. En revanche, si le pic de
piézométrie arrive après celui du niveau dans le réservoir « sol », le karst participerait
davantage à la phase de décrue qu’à la phase de montée de la crue. Cette comparaison s’est
faite sur les épisodes de crues entre 2000 et 2008 pour lesquels les données piézométriques à
pas de temps horaire étaient disponibles. De manière générale, on s’aperçoit que les deux
variables (à savoir la piézométrie et le niveau dans le réservoir « sol » du modèle) présentent
la même évolution temporelle, avec un retard systématique de la piézométrie plus ou moins
important en fonction des épisodes. Ce retard suggère que le souterrain ne contribuerait pas au
premier pic de crue mais pourrait contribuer à la pointe de crue des pics suivants dans le cas
d’une crue à pointes multiples (figure 67). Ce comportement a d’ailleurs déjà été observé dans
la région sur le bassin karstique de Nîmes [Maréchal et al., 2007] ou sur celui du Coulazou
[Bailly-Comte et al., 2008].
3.4.3. Injection des débits observés à la source du Lez
Le karst peut aussi contribuer à la crue de surface en se vidangeant par ses sources qui
constituent des exutoires pérennes ou temporaires de l’aquifère. On peut alors se demander si
la vidange par ces sources permet au karst de contribuer à la pointe de la crue de surface. A la
différence du mécanisme de participation par saturation de la capacité de stockage, la
contribution par les sources peut permettre un transfert souterrain rapide de la crue par effet
piston (transfert de pression). Ce phénomène est évoqué dans les études géochimiques
récentes menées à la source du Lez [Caetano Bicalho, 2010]. En supposant qu’un tel
phénomène existe pour l’aquifère du Lez, le transfert souterrain (transfert de pression) peut
être plus rapide que le transfert en surface (transfert de masse) intervenant dans le mécanisme
de saturation de la capacité de stockage. La vidange du karst par les sources pourrait donc
permettre une contribution du karst plus rapide que la saturation de la capacité de stockage et
permettrait au karst de contribuer à la montée ou à la pointe de crue. Pour savoir si cette
vidange des sources peut permettre une contribution du karst à la pointe de la crue de surface,
l’hydrogramme observé de la source du Lez est injecté dans le modèle distribué et transféré
jusqu’à l’exutoire. Les temps d’arrivée des pics de crue sont ensuite comparés. Dans
l’hypothèse où la fonction de transfert utilisée est représentative du transfert en surface du
bassin, si le pic de crue (de l’hydrogramme transféré) de la source du Lez arrive plus tôt que
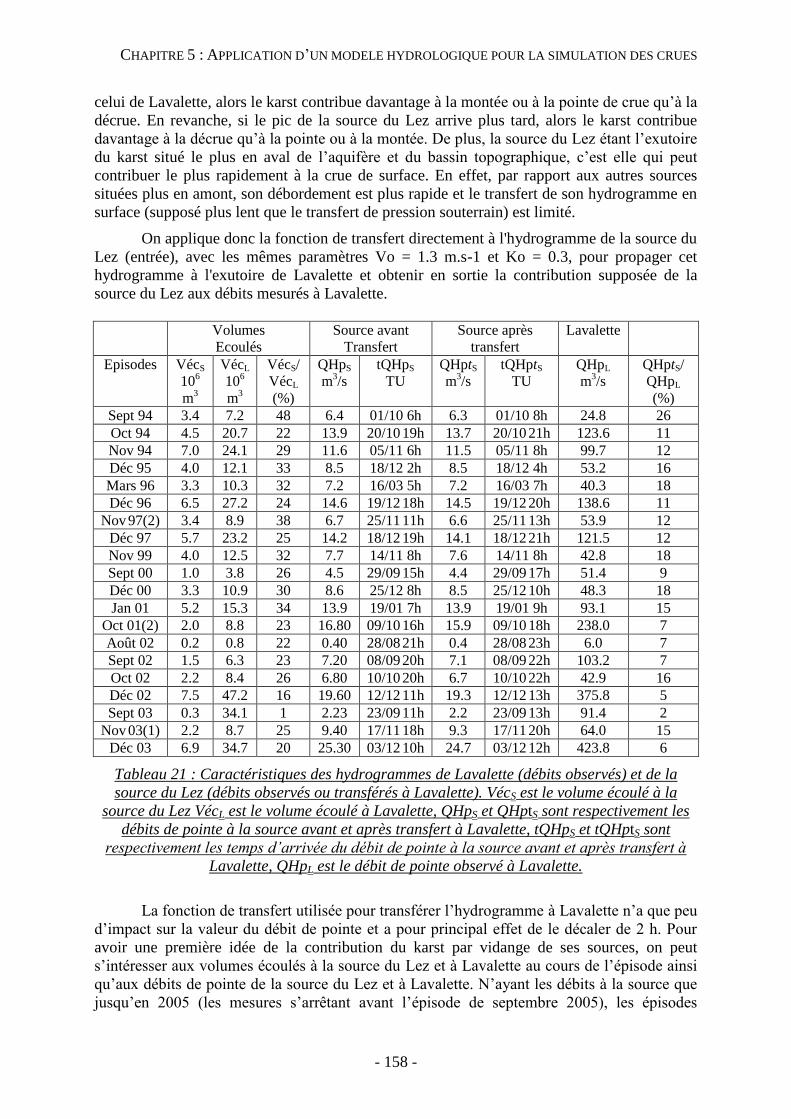
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 158 -
celui de Lavalette, alors le karst contribue davantage à la montée ou à la pointe de crue qu’à la
décrue. En revanche, si le pic de la source du Lez arrive plus tard, alors le karst contribue
davantage à la décrue qu’à la pointe ou à la montée. De plus, la source du Lez étant l’exutoire
du karst situé le plus en aval de l’aquifère et du bassin topographique, c’est elle qui peut
contribuer le plus rapidement à la crue de surface. En effet, par rapport aux autres sources
situées plus en amont, son débordement est plus rapide et le transfert de son hydrogramme en
surface (supposé plus lent que le transfert de pression souterrain) est limité.
On applique donc la fonction de transfert directement à l'hydrogramme de la source du
Lez (entrée), avec les mêmes paramètres Vo = 1.3 m.s-1 et Ko = 0.3, pour propager cet
hydrogramme à l'exutoire de Lavalette et obtenir en sortie la contribution supposée de la
source du Lez aux débits mesurés à Lavalette.
Volumes
Ecoulés
Source avant
Transfert
Source après
transfert
Lavalette
Episodes VécS
106
m3
VécL
106
m3
VécS/
VécL
(%)
QHpS
m3/s
tQHpS
TU
QHptS
m3/s
tQHptS
TU
QHpL
m3/s
QHptS/
QHpL
(%)
Sept 94 3.4 7.2 48 6.4 01/10 6h 6.3 01/10 8h 24.8 26
Oct 94 4.5 20.7 22 13.9 20/10 19h 13.7 20/10 21h 123.6 11
Nov 94 7.0 24.1 29 11.6 05/11 6h 11.5 05/11 8h 99.7 12
Déc 95 4.0 12.1 33 8.5 18/12 2h 8.5 18/12 4h 53.2 16
Mars 96 3.3 10.3 32 7.2 16/03 5h 7.2 16/03 7h 40.3 18
Déc 96 6.5 27.2 24 14.6 19/12 18h 14.5 19/12 20h 138.6 11
Nov 97(2) 3.4 8.9 38 6.7 25/11 11h 6.6 25/11 13h 53.9 12
Déc 97 5.7 23.2 25 14.2 18/12 19h 14.1 18/12 21h 121.5 12
Nov 99 4.0 12.5 32 7.7 14/11 8h 7.6 14/11 8h 42.8 18
Sept 00 1.0 3.8 26 4.5 29/09 15h 4.4 29/09 17h 51.4 9
Déc 00 3.3 10.9 30 8.6 25/12 8h 8.5 25/12 10h 48.3 18
Jan 01 5.2 15.3 34 13.9 19/01 7h 13.9 19/01 9h 93.1 15
Oct 01(2) 2.0 8.8 23 16.80 09/10 16h 15.9 09/10 18h 238.0 7
Août 02 0.2 0.8 22 0.40 28/08 21h 0.4 28/08 23h 6.0 7
Sept 02 1.5 6.3 23 7.20 08/09 20h 7.1 08/09 22h 103.2 7
Oct 02 2.2 8.4 26 6.80 10/10 20h 6.7 10/10 22h 42.9 16
Déc 02 7.5 47.2 16 19.60 12/12 11h 19.3 12/12 13h 375.8 5
Sept 03 0.3 34.1 1 2.23 23/09 11h 2.2 23/09 13h 91.4 2
Nov 03(1) 2.2 8.7 25 9.40 17/11 18h 9.3 17/11 20h 64.0 15
Déc 03 6.9 34.7 20 25.30 03/12 10h 24.7 03/12 12h 423.8 6
Tableau 21 : Caractéristiques des hydrogrammes de Lavalette (débits observés) et de la
source du Lez (débits observés ou transférés à Lavalette). VécS est le volume écoulé à la
source du Lez VécL est le volume écoulé à Lavalette, QHpS et QHptS sont respectivement les
débits de pointe à la source avant et après transfert à Lavalette, tQHpS et tQHptS sont
respectivement les temps d’arrivée du débit de pointe à la source avant et après transfert à
Lavalette, QHpL est le débit de pointe observé à Lavalette.
La fonction de transfert utilisée pour transférer l’hydrogramme à Lavalette n’a que peu
d’impact sur la valeur du débit de pointe et a pour principal effet de le décaler de 2 h. Pour
avoir une première idée de la contribution du karst par vidange de ses sources, on peut
s’intéresser aux volumes écoulés à la source du Lez et à Lavalette au cours de l’épisode ainsi
qu’aux débits de pointe de la source du Lez et à Lavalette. N’ayant les débits à la source que
jusqu’en 2005 (les mesures s’arrêtant avant l’épisode de septembre 2005), les épisodes
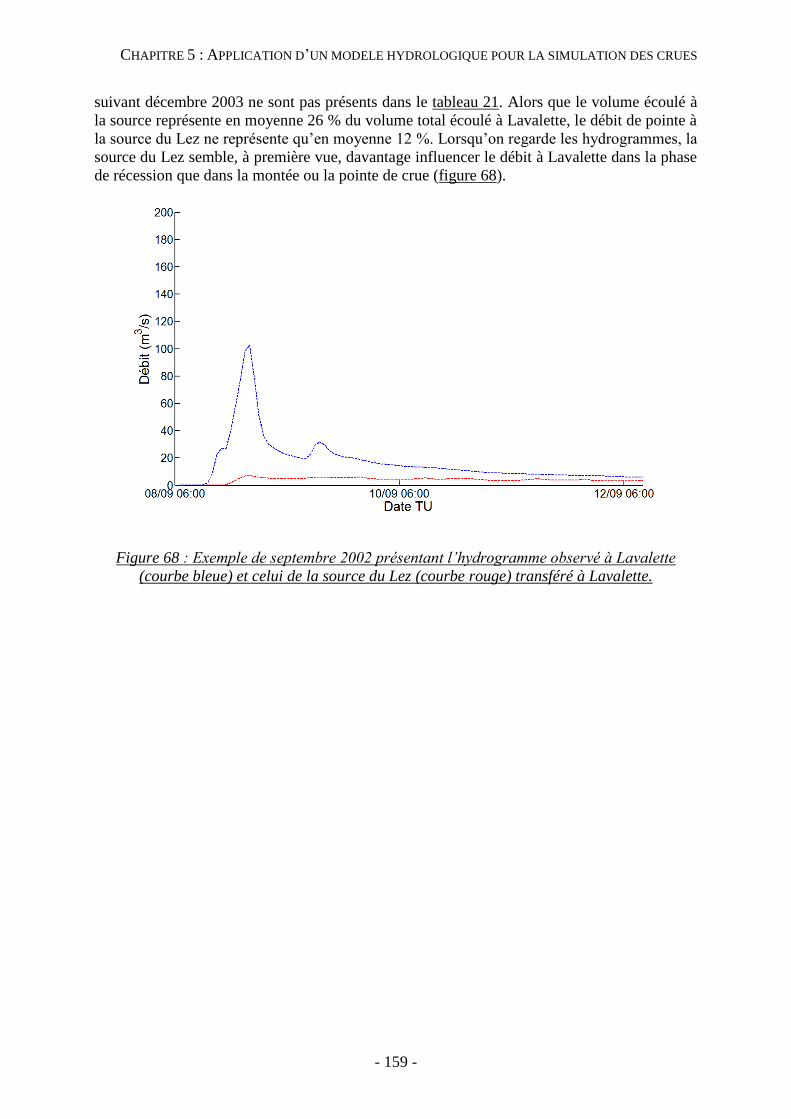
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 159 -
suivant décembre 2003 ne sont pas présents dans le tableau 21. Alors que le volume écoulé à
la source représente en moyenne 26 % du volume total écoulé à Lavalette, le débit de pointe à
la source du Lez ne représente qu’en moyenne 12 %. Lorsqu’on regarde les hydrogrammes, la
source du Lez semble, à première vue, davantage influencer le débit à Lavalette dans la phase
de récession que dans la montée ou la pointe de crue (figure 68).
Figure 68 : Exemple de septembre 2002 présentant l’hydrogramme observé à Lavalette
(courbe bleue) et celui de la source du Lez (courbe rouge) transféré à Lavalette.
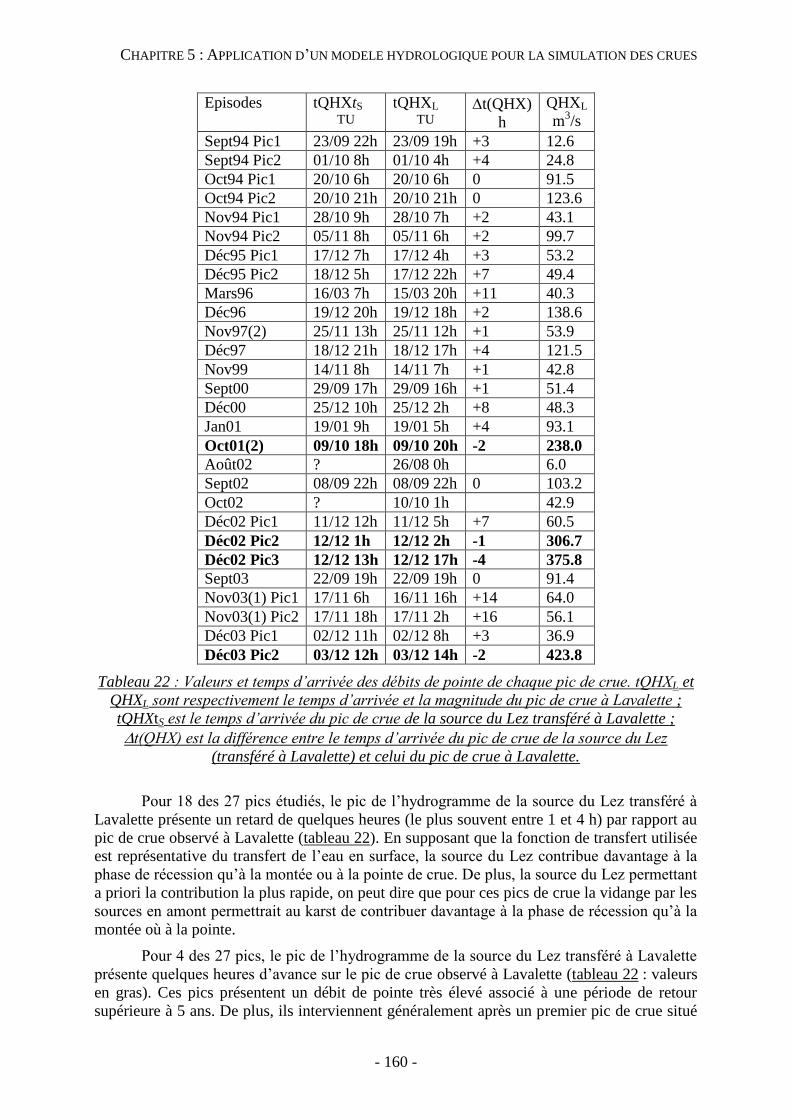
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 160 -
Episodes tQHXtS
TU
tQHXL
TU t(QHX)
h
QHXL
m3/s
Sept94 Pic1 23/09 22h 23/09 19h +3 12.6
Sept94 Pic2 01/10 8h 01/10 4h +4 24.8
Oct94 Pic1 20/10 6h 20/10 6h 0 91.5
Oct94 Pic2 20/10 21h 20/10 21h 0 123.6
Nov94 Pic1 28/10 9h 28/10 7h +2 43.1
Nov94 Pic2 05/11 8h 05/11 6h +2 99.7
Déc95 Pic1 17/12 7h 17/12 4h +3 53.2
Déc95 Pic2 18/12 5h 17/12 22h +7 49.4
Mars96 16/03 7h 15/03 20h +11 40.3
Déc96 19/12 20h 19/12 18h +2 138.6
Nov97(2) 25/11 13h 25/11 12h +1 53.9
Déc97 18/12 21h 18/12 17h +4 121.5
Nov99 14/11 8h 14/11 7h +1 42.8
Sept00 29/09 17h 29/09 16h +1 51.4
Déc00 25/12 10h 25/12 2h +8 48.3
Jan01 19/01 9h 19/01 5h +4 93.1
Oct01(2) 09/10 18h 09/10 20h -2 238.0
Août02 ? 26/08 0h 6.0
Sept02 08/09 22h 08/09 22h 0 103.2
Oct02 ? 10/10 1h 42.9
Déc02 Pic1 11/12 12h 11/12 5h +7 60.5
Déc02 Pic2 12/12 1h 12/12 2h -1 306.7
Déc02 Pic3 12/12 13h 12/12 17h -4 375.8
Sept03 22/09 19h 22/09 19h 0 91.4
Nov03(1) Pic1 17/11 6h 16/11 16h +14 64.0
Nov03(1) Pic2 17/11 18h 17/11 2h +16 56.1
Déc03 Pic1 02/12 11h 02/12 8h +3 36.9
Déc03 Pic2 03/12 12h 03/12 14h -2 423.8
Tableau 22 : Valeurs et temps d’arrivée des débits de pointe de chaque pic de crue. tQHXL et
QHXL sont respectivement le temps d’arrivée et la magnitude du pic de crue à Lavalette ;
tQHXtS est le temps d’arrivée du pic de crue de la source du Lez transféré à Lavalette ;
t(QHX) est la différence entre le temps d’arrivée du pic de crue de la source du Lez
(transféré à Lavalette) et celui du pic de crue à Lavalette.
Pour 18 des 27 pics étudiés, le pic de l’hydrogramme de la source du Lez transféré à
Lavalette présente un retard de quelques heures (le plus souvent entre 1 et 4 h) par rapport au
pic de crue observé à Lavalette (tableau 22). En supposant que la fonction de transfert utilisée
est représentative du transfert de l’eau en surface, la source du Lez contribue davantage à la
phase de récession qu’à la montée ou à la pointe de crue. De plus, la source du Lez permettant
a priori la contribution la plus rapide, on peut dire que pour ces pics de crue la vidange par les
sources en amont permettrait au karst de contribuer davantage à la phase de récession qu’à la
montée où à la pointe.
Pour 4 des 27 pics, le pic de l’hydrogramme de la source du Lez transféré à Lavalette
présente quelques heures d’avance sur le pic de crue observé à Lavalette (tableau 22 : valeurs
en gras). Ces pics présentent un débit de pointe très élevé associé à une période de retour
supérieure à 5 ans. De plus, ils interviennent généralement après un premier pic de crue situé
CHAPITRE 5 : APPLICATION D’UN MODELE HYDROLOGIQUE POUR LA SIMULATION DES CRUES
- 161 -
quelques jours avant (pour octobre 2001) ou quelques heures avant (pour décembre 2002 et
décembre 2003). La source contribue donc à la phase de montée et à la pointe de la crue de
surface. L’avance du pic laisse même suggérer que des sources situées plus amont peuvent
elles aussi contribuer à cette phase de montée. La contribution à la pointe de crue paraît donc
possible lors des épisodes de crue importants.
4. Conclusion
Le modèle événementiel pluie-débit à réservoir utilisé dans ce travail de thèse
reproduit de façon relativement satisfaisante les crues de surface du bassin karstique du Lez.
Ses avantages pour la prévision des crues en temps réel sont sa frugalité et sa parcimonie. En
effet, son utilisation nécessite un nombre limité de données, principalement les pluies horaires
mesurées pendant l’épisode de crue. Il contient aussi un nombre réduit de paramètres qui
restent constants pour l’ensemble des 21 événements testés sur la période 1994 – 2008, à
l’exception de la condition initiale S qu’on ajuste d’un épisode sur l’autre afin de représenter
le déficit hydrique initial de l’hydrosystème en début d’événement.
Le caractère distribué du modèle permet de tirer avantage de la fine résolution spatiale
des pluies radar sans augmenter le nombre de paramètres du modèle. En effet, l’utilisation de
pluies radar de bonne qualité en début d’automne améliore la plupart des hydrogrammes
simulés de façon significative en compensant la faible densité de pluviographes sur le bassin
ou les lacunes dans les chroniques de pluie au sol. A la fin de l’automne, la qualité des
mesures de pluie radar est moindre, probablement détériorée par la faible extension verticale
du nuage et la faible altitude de l’isotherme 0° C. Les simulations qui en découlent sont alors
moins satisfaisantes qu’avec les pluies au sol.
La condition initiale du modèle est également bien corrélée aux indicateurs de l’état
hydrique de l’hydrosystème que sont l’indice d’humidité Hu2 et la piézométrie. Les niveaux
piézométriques montrent les meilleures corrélations avec la condition initiale mais le nombre
limité d’événements disponibles ne permet pas d’établir une hiérarchie dans la performance
des indicateurs. Son initialisation reste néanmoins robuste et se fait avec des indicateurs de
l’état hydrique facilement disponibles.
L’interprétation des résultats du modèle, à travers la comparaison de la dynamique du
réservoir sol avec celles de l'humidité du sol ou du niveau piézométrique, suggère que les pics
de crue sont essentiellement dus à l'écoulement produit par les formations superficielles. Le
karst peut aussi contribuer à la crue permettant un accroissement du volume ruisselé. Sa
contribution semble néanmoins plus tardive contribuant davantage au soutien de la récession
qu’à la montée ou au pic de crue.
La parcimonie, la frugalité, l’initialisation robuste et facile de ce modèle en font un
outil utilisable pour de nombreuses applications hydrologiques opérationnelles comme la
prédétermination ou la prévision en temps réel. Néanmoins, les sources d’incertitudes restent
nombreuses et peuvent limiter les performances du modèle en opérationnel. Une technique
d’assimilation de données peut alors être appliquée pour réduire ces incertitudes et améliorer
les performances du modèle en opérationnel et en temps réel.

CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 163 -
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE
D’ASSIMILATION DE DONNEES POUR LA PREVISION
DES CRUES
Ce chapitre présente l’application d’une technique d’assimilation de données au
modèle hydrologique du Lez. La technique utilisée est le BLUE avec boucle externe. Dans le
cadre de ce travail, cette technique utilise les débits observés à l’exutoire du bassin versant
pour corriger les paramètres ou les variables d’entrée du modèle hydrologique. Après avoir
présenté le principe et l’implémentation du BLUE et de sa boucle externe en section 1, la
section 2 présente les résultats obtenus après correction des paramètres. La section 3 est
consacrée aux résultats obtenus après correction des variables d’entrée.
1. Principe et implémentation de la technique d’assimilation de données
1.1. Principe du BLUE et de sa boucle externe
Cette section décrit de façon théorique le BLUE avec boucle externe, technique
d’assimilation utilisée dans ce travail de thèse. Afin de comprendre son principe, un parallèle
est effectué avec le 3D-VAR.
La méthode du 3D-VAR [Bouttier et Courtier, 1999] consiste à minimiser la fonction
coût J(x) pour trouver les valeurs optimales des variables stockées dans le vecteur x :
))(())((2
1)()(
2
1)J( 11
xyRxyxxBxxx HH oTobTb (Eq. 77)
où x désigne le vecteur de contrôle de taille n, contenant l’ensemble des n variables à
optimiser. Ces variables peuvent correspondre à des forçages, des variables d’état ou des
paramètres de modèle. xb est le vecteur d’ébauche de taille n contenant les valeurs a priori des
variables du vecteur de contrôle. yo est un vecteur de taille p contenant les p observations à
assimiler. La fonction coût J(x) quantifie donc la distance du vecteur x d’une part à l’ébauche
xb et d’autre part aux observations y
o. La distance à l’ébauche est pondérée par l’inverse de la
matrice B alors que la distance aux observations est pondérée par l’inverse de la matrice R. B,
de taille n x n et R, de taille p x p, sont les matrices symétriques positives contenant
respectivement les covariances des erreurs commises sur l’ébauche xb et les observations y
o.
Les erreurs sur xb et y
o sont supposées indépendantes, gaussiennes et non-biaisées. H est
l’opérateur d’observation, potentiellement non linéaire qui permet de passer de l’espace des
variables à optimiser x à celui des observations yo. H n’étant généralement pas linéaire, la
fonction coût J(x) n’est pas quadratique ce qui rend sa minimisation difficile. On approxime
alors localement J(x) par une fonction coût incrémentale quadratique Jinc(xl ; x) plus facile à
minimiser qui utilise une approximation linéaire de H :
))δ()(())δ()((2
1δδ
2
1)δ;(J xl
1T
xl
1T
inc ll
o
lll xxxHxyRxxxHxyxBxxx bbo HH
(Eq. 78)
où x = x - xb et Hxl est l’opérateur d’observation linéarisé, calculé par différences finies
décentrées autour d’un point xl pour une faible perturbation dx :

CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 164 -
dx
xdxx
dx
xdxH ll
l
)()()( HHH . (Eq. 79)
Cette fonction J(x) est minimale lorsque son gradient s’annule pour un x optimal
obtenu avec un minimiseur ou la solution :
0))δ()((δ)δ;(J xlxl
11
inc
lll xxxHxyHRxBxxbo H . (Eq. 80)
Pour minimiser la fonction coût incrémentale, on peut annuler son gradient ou calculer
le Best Linear Unbiased Estimator (BLUE). Dans notre cas, étant donné la petite taille des
matrices d’erreurs de covariance B et R, le calcul direct du BLUE [Gelb, 1974 ; Talagrand,
1997] est utilisé pour trouver le minimum de la fonction coût Jinc(xl ; x). La méthode du
BLUE suppose que l’estimation optimale xa de la variable x est obtenue lorsque la trace de la
matrice de covariances d’erreur A qui lui est associée est minimale. Ceci nous conduit à
estimer la matrice de gain K [Bouttier et Courtier, 1999] :
1
xl
1T
xl
1T
xl )( HRHBRHK . (Eq. 81)
Cette matrice nous permet ensuite d’estimer la valeur analysée xa du vecteur de contrôle x et
la matrice de covariance de ses erreurs A
Kdxx ba , (Eq. 82)
BKHIA )( xl , (Eq. 83)
où d est l’innovation représentant l’écart entre les observations yo et l’approximation linéaire
de l’équivalent observable du contrôle H(xl)+Hxl(x-xl).
)]()([ xl xlxHxlyd bo H . (Eq. 84)
En calculant le BLUE, on ne minimise pas la fonction coût J(x) mais son
approximation Jinc(xl ; x). Afin de se rapprocher du minimum de J(x), l’algorithme du BLUE
est muni d’une boucle externe qui met périodiquement à jour la valeur du point de
linéarisation xl. Ainsi lors de la première itération de la boucle externe, la linéarisation se fait
autour de l’ébauche xb alors que lors des itérations suivantes, la linéarisation se fait autour de
l’analyse de l’itération précédente. Ceci permet de prendre en compte les non-linéarités de
l’opérateur d’observation H.
1.2. Illustration par un exemple simple
Dans cet exemple, la technique d’assimilation de données décrite ci-dessus est
appliquée au modèle hydrologique réduit à une maille (modèle « jouet »). Elle utilise les
premiers débits observés pour corriger la taille S du réservoir « sol » du modèle hydrologique.
Le vecteur de contrôle x contient donc le paramètre S et sa valeur a priori est stockée dans le
vecteur d’ébauche xb = [S
b]. L’écart-type de l’erreur commise sur S
b est stocké dans la matrice
B. Les observations yo correspondent aux débits observés et les écart-types sur les erreurs
d’observations sont stockés dans R. Elles sont supposées être décorrélées. L’opérateur
d’observation H correspond au modèle hydrologique forcé par les pluies. L’équivalent
observable H(x) correspond donc aux débits simulés.
Une expérience jumelle réalisée avec le modèle « jouet » permet d’illustrer le
fonctionnement de l’algorithme d’assimilation de données. Il s’agit d’une expérience
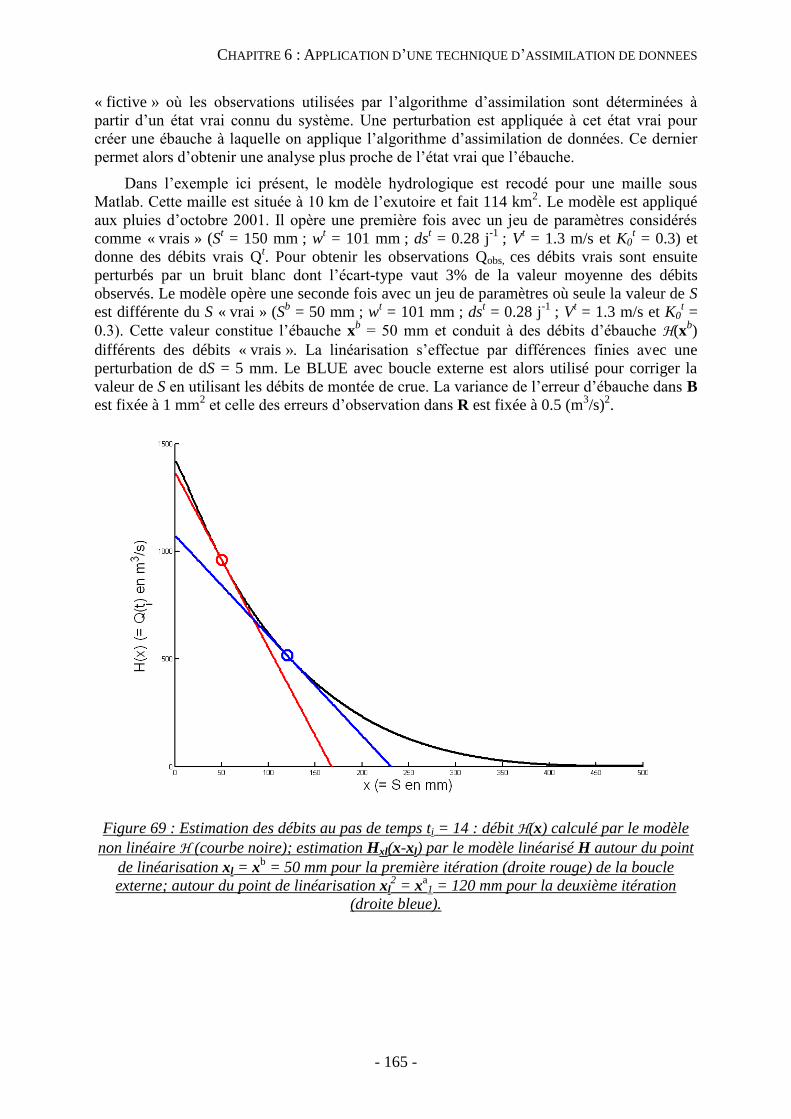
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 165 -
« fictive » où les observations utilisées par l’algorithme d’assimilation sont déterminées à
partir d’un état vrai connu du système. Une perturbation est appliquée à cet état vrai pour
créer une ébauche à laquelle on applique l’algorithme d’assimilation de données. Ce dernier
permet alors d’obtenir une analyse plus proche de l’état vrai que l’ébauche.
Dans l’exemple ici présent, le modèle hydrologique est recodé pour une maille sous
Matlab. Cette maille est située à 10 km de l’exutoire et fait 114 km2. Le modèle est appliqué
aux pluies d’octobre 2001. Il opère une première fois avec un jeu de paramètres considérés
comme « vrais » (St = 150 mm ; w
t = 101 mm ; ds
t = 0.28 j
-1 ; V
t = 1.3 m/s et K0
t = 0.3) et
donne des débits vrais Qt. Pour obtenir les observations Qobs, ces débits vrais sont ensuite
perturbés par un bruit blanc dont l’écart-type vaut 3% de la valeur moyenne des débits
observés. Le modèle opère une seconde fois avec un jeu de paramètres où seule la valeur de S
est différente du S « vrai » (Sb = 50 mm ; w
t = 101 mm ; ds
t = 0.28 j
-1 ; V
t = 1.3 m/s et K0
t =
0.3). Cette valeur constitue l’ébauche xb = 50 mm et conduit à des débits d’ébauche H(x
b)
différents des débits « vrais ». La linéarisation s’effectue par différences finies avec une
perturbation de dS = 5 mm. Le BLUE avec boucle externe est alors utilisé pour corriger la
valeur de S en utilisant les débits de montée de crue. La variance de l’erreur d’ébauche dans B
est fixée à 1 mm2 et celle des erreurs d’observation dans R est fixée à 0.5 (m
3/s)
2.
Figure 69 : Estimation des débits au pas de temps ti = 14 : débit H(x) calculé par le modèle
non linéaire H (courbe noire); estimation Hxl(x-xl) par le modèle linéarisé H autour du point
de linéarisation xl = xb = 50 mm pour la première itération (droite rouge) de la boucle
externe; autour du point de linéarisation xl2 = x
a1 = 120 mm pour la deuxième itération
(droite bleue).
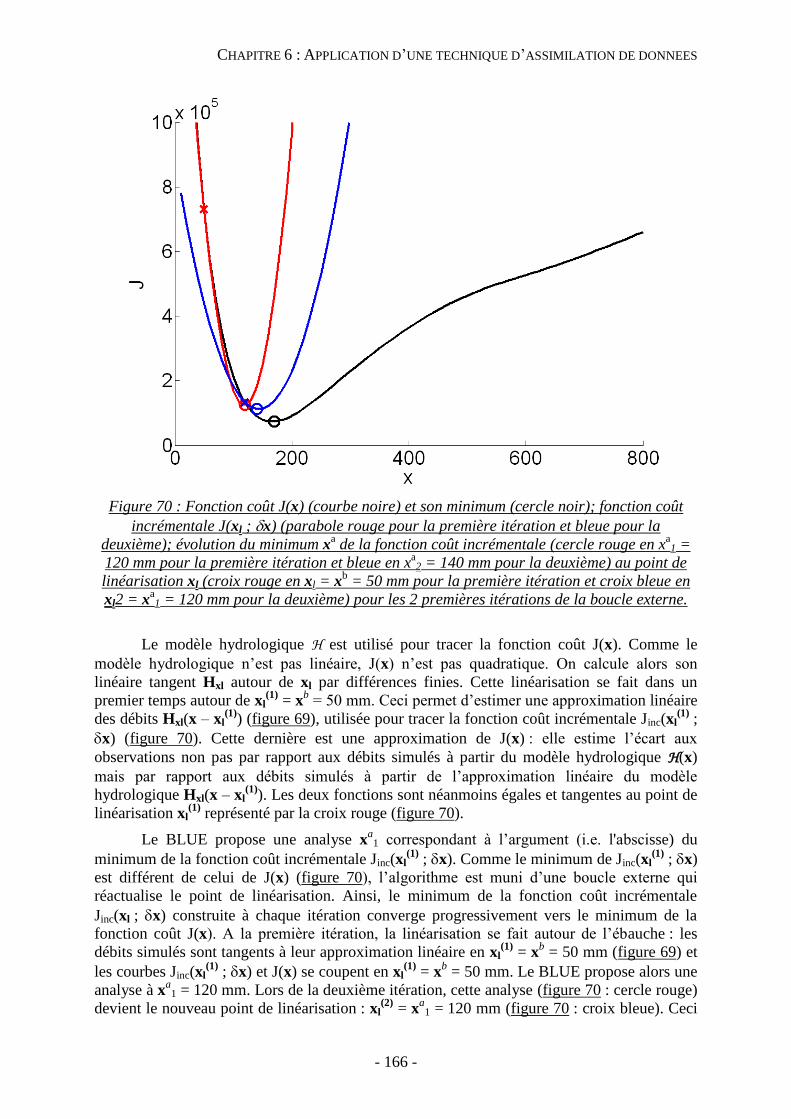
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 166 -
Figure 70 : Fonction coût J(x) (courbe noire) et son minimum (cercle noir); fonction coût
incrémentale J(xl ; x) (parabole rouge pour la première itération et bleue pour la
deuxième); évolution du minimum xa de la fonction coût incrémentale (cercle rouge en x
a1 =
120 mm pour la première itération et bleue en xa2 = 140 mm pour la deuxième) au point de
linéarisation xl (croix rouge en xl = xb = 50 mm pour la première itération et croix bleue en
xl2 = xa1 = 120 mm pour la deuxième) pour les 2 premières itérations de la boucle externe.
Le modèle hydrologique H est utilisé pour tracer la fonction coût J(x). Comme le
modèle hydrologique n’est pas linéaire, J(x) n’est pas quadratique. On calcule alors son
linéaire tangent Hxl autour de xl par différences finies. Cette linéarisation se fait dans un
premier temps autour de xl(1)
= xb = 50 mm. Ceci permet d’estimer une approximation linéaire
des débits Hxl(x – xl(1)
) (figure 69), utilisée pour tracer la fonction coût incrémentale Jinc(xl(1)
;
x) (figure 70). Cette dernière est une approximation de J(x) : elle estime l’écart aux
observations non pas par rapport aux débits simulés à partir du modèle hydrologique H(x)
mais par rapport aux débits simulés à partir de l’approximation linéaire du modèle
hydrologique Hxl(x – xl(1)
). Les deux fonctions sont néanmoins égales et tangentes au point de
linéarisation xl(1)
représenté par la croix rouge (figure 70).
Le BLUE propose une analyse xa
1 correspondant à l’argument (i.e. l'abscisse) du
minimum de la fonction coût incrémentale Jinc(xl(1)
; x). Comme le minimum de Jinc(xl(1)
; x)
est différent de celui de J(x) (figure 70), l’algorithme est muni d’une boucle externe qui
réactualise le point de linéarisation. Ainsi, le minimum de la fonction coût incrémentale
Jinc(xl ; x) construite à chaque itération converge progressivement vers le minimum de la
fonction coût J(x). A la première itération, la linéarisation se fait autour de l’ébauche : les
débits simulés sont tangents à leur approximation linéaire en xl(1)
= xb = 50 mm (figure 69) et
les courbes Jinc(xl(1)
; x) et J(x) se coupent en xl(1)
= xb = 50 mm. Le BLUE propose alors une
analyse à xa
1 = 120 mm. Lors de la deuxième itération, cette analyse (figure 70 : cercle rouge)
devient le nouveau point de linéarisation : xl(2)
= xa
1 = 120 mm (figure 70 : croix bleue). Ceci
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 167 -
permet le calcul d’un nouveau linéaire tangent Hxl et la construction d’une nouvelle fonction
coût incrémentale Jinc(xl(2)
; x) (figure 70 : parabole bleue). Le BLUE propose alors une
analyse xa
2 = 140 mm (figure 70 : cercle bleu), plus proche de l’argument du minimum de
J(x) que xa
1.
1.3. Implémentation du BLUE sous PALM
La procédure d’assimilation (section 1.1) a été implémentée autour du modèle
hydrologique distribué à l’aide de PALM (Parallel Assimilation with a Lot of Modularity)
[Lagarde, 2000 ; Lagarde et al., 2001], un coupleur dynamique de codes de calculs développé
au CERFACS. Initialement dédié à l'implémentation des méthodes d’assimilation de données
en océanographie dans le cadre du projet MERCATOR, ce logiciel facilite le couplage et la
parallélisation de codes de calculs indépendants [Fouilloux and Piacentini, 1999; Buis et al.,
2006].
Une maquette (ou application) PALM est composée de branches où se fait
l’agencement d’unités (ou codes de calculs) qui échangent des objets (ou données) à travers
des communications. Les branches sont les éléments de PALM qui permettent d’organiser,
d’agencer les codes de calculs (les unités). Une ou plusieurs branches peuvent être construites
selon que l’agencement des unités est séquentiel ou parallèle.
Les unités sont les programmes (ou codes de calculs) PALMés (autrement dit adaptés
pour fonctionner sous PALM). Elles sont représentées par des rectangles ou boîtes dans
l’interface graphique PrePALM (
figure 71). Elles sont écrites en fortran 90, 77, C ou C++. A la différence du programme
initial non-PALMé, une unité possède une carte d’identité qui définit le type et la taille des
objets (des données) qu’elle devra échanger. Elle contient également 2 fonctions propres à
PALM, CALL_PALM_Get et CALL_PALM_Put qui lui permettront respectivement de
recevoir les objets dont elle a besoin et de donner les objets qu’elle doit mettre à disposition
pour les autres unités.
Les communications permettent les échanges d’objets sous PALM. Elles peuvent se
faire entre 2 unités, 2 branches ou une branche et une unité. Une communication peut se faire
directement d’une unité à une autre : elle est alors représentée par un fil qui relie les 2 unités (
figure 71). Elle peut aussi se faire indirectement. Dans ce cas, l’objet est stocké dans la
mémoire temporaire de l’ordinateur (le buffer) avant d’être utilisé par une autre unité : la
communication avec le buffer est alors représentée par un carré.
Une illustration de la maquette PALM utilisée pour implémenter le BLUE et sa boucle
externe autour du modèle hydrologique distribuée est donnée en
figure 71. La construction présentée ici est similaire à la maquette initiale utilisée par
le SCHAPI sur le Gardon d’Anduze. Elle permet de corriger uniquement les paramètres S et V
du modèle hydrologique. Cette maquette a ensuite été aménagée pour corriger les pluies de
façon uniforme (cf section 3 de ce chapitre). Elle est constituée de 4 branches (« OBS »,
« MISFIT », « MCDES_DELTAP1 » et « MCDES_DELTAP2 ») et 9 unités. Son
fonctionnement est le suivant :
1. Les premiers débits observés à l’exutoire du bassin yo sont lus par l’unité « obs_debit »
contenue dans la branche « OBS ».
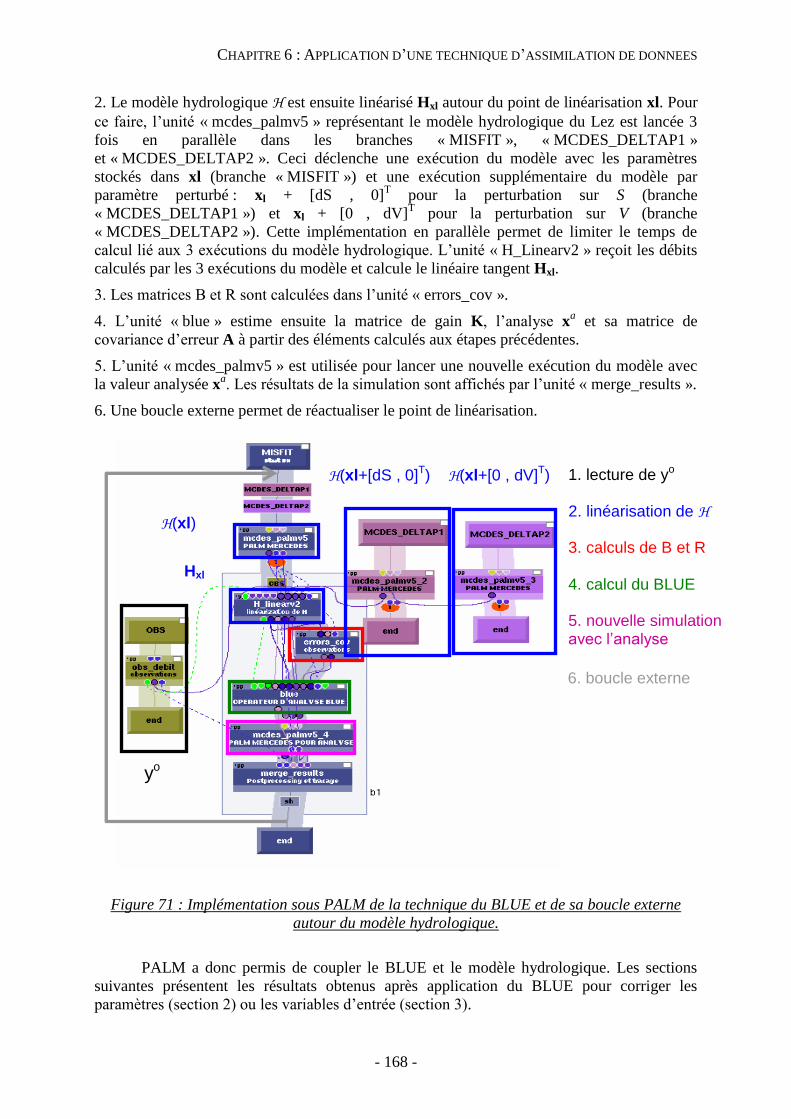
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 168 -
2. Le modèle hydrologique H est ensuite linéarisé Hxl autour du point de linéarisation xl. Pour
ce faire, l’unité « mcdes_palmv5 » représentant le modèle hydrologique du Lez est lancée 3
fois en parallèle dans les branches « MISFIT », « MCDES_DELTAP1 »
et « MCDES_DELTAP2 ». Ceci déclenche une exécution du modèle avec les paramètres
stockés dans xl (branche « MISFIT ») et une exécution supplémentaire du modèle par
paramètre perturbé : xl + [dS , 0]T pour la perturbation sur S (branche
« MCDES_DELTAP1 ») et xl + [0 , dV]T pour la perturbation sur V (branche
« MCDES_DELTAP2 »). Cette implémentation en parallèle permet de limiter le temps de
calcul lié aux 3 exécutions du modèle hydrologique. L’unité « H_Linearv2 » reçoit les débits
calculés par les 3 exécutions du modèle et calcule le linéaire tangent Hxl.
3. Les matrices B et R sont calculées dans l’unité « errors_cov ».
4. L’unité « blue » estime ensuite la matrice de gain K, l’analyse xa et sa matrice de
covariance d’erreur A à partir des éléments calculés aux étapes précédentes.
5. L’unité « mcdes_palmv5 » est utilisée pour lancer une nouvelle exécution du modèle avec
la valeur analysée xa. Les résultats de la simulation sont affichés par l’unité « merge_results ».
6. Une boucle externe permet de réactualiser le point de linéarisation.
Figure 71 : Implémentation sous PALM de la technique du BLUE et de sa boucle externe
autour du modèle hydrologique.
PALM a donc permis de coupler le BLUE et le modèle hydrologique. Les sections
suivantes présentent les résultats obtenus après application du BLUE pour corriger les
paramètres (section 2) ou les variables d’entrée (section 3).
yo
1. lecture de yo
4. calcul du BLUE
5. nouvelle simulation avec l’analyse
3. calculs de B et R
Hxl
H(xl)
H(xl+[dS , 0]T)
2. linéarisation de H
H(xl+[0 , dV]T)
6. boucle externe
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 169 -
2. Correction des paramètres du modèle hydrologique
2.1. Objectifs et données utilisées
2.1.1. Objectifs
Les techniques d’assimilation de données utilisées en prévision des crues visent à
améliorer la simulation des débits à l’exutoire du bassin. Appelées aussi techniques de mise à
jour, elles se distinguent par la composante du modèle qu’elles cherchent à corriger. On peut
ainsi corriger les variables d’entrée, les paramètres (constants au cours d’une simulation), les
variables d’état (qui varient au cours d’une simulation) ou les débits en sorties (cf. chapitre 2
section 3). Alors que les corrections des variables d’état et des sorties sont fréquemment
employées et ont fait l’objet de nombreuses études, la correction des paramètres ou celle des
variables d’entrée semble moins étudiée. Dans cette section, le BLUE avec boucle externe est
utilisé pour améliorer les prévisions de débit réalisées par le modèle hydrologique à l’exutoire
du bassin du Lez. A une date de prévision t0, on cherchera à recalibrer les paramètres du
modèle en fonction des débits observés à l’exutoire du bassin jusqu'à cette date t0.
Les objectifs de cette étude sont i) de sélectionner le ou les paramètres qui permettent
la correction la plus efficace et la plus sûre du pic de débit à prévoir, ii) de montrer l’impact
de la correction de la condition initiale sur les débits à l’exutoire iii) d’identifier et de
comprendre les situations dans lesquelles la technique d’assimilation atteint ses limites.
2.1.2. Données utilisées
Pour cette étude, 12 épisodes de crues ont été sélectionnés entre 1994 et 2008. Ils
présentent tous des débits de pointe de plus de 90 m3/s correspondant à une période de retour
supérieure ou égale à 2 ans (tableau 23).
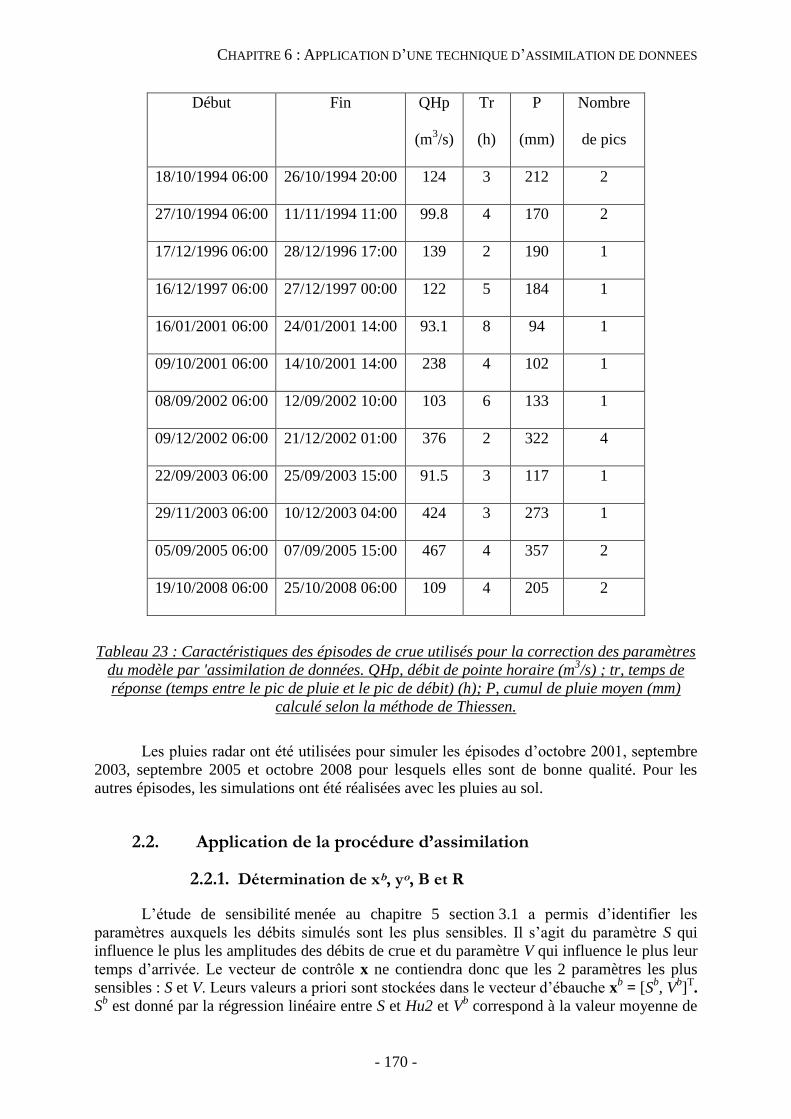
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 170 -
Début Fin QHp
(m3/s)
Tr
(h)
P
(mm)
Nombre
de pics
18/10/1994 06:00 26/10/1994 20:00 124 3 212 2
27/10/1994 06:00 11/11/1994 11:00 99.8 4 170 2
17/12/1996 06:00 28/12/1996 17:00 139 2 190 1
16/12/1997 06:00 27/12/1997 00:00 122 5 184 1
16/01/2001 06:00 24/01/2001 14:00 93.1 8 94 1
09/10/2001 06:00 14/10/2001 14:00 238 4 102 1
08/09/2002 06:00 12/09/2002 10:00 103 6 133 1
09/12/2002 06:00 21/12/2002 01:00 376 2 322 4
22/09/2003 06:00 25/09/2003 15:00 91.5 3 117 1
29/11/2003 06:00 10/12/2003 04:00 424 3 273 1
05/09/2005 06:00 07/09/2005 15:00 467 4 357 2
19/10/2008 06:00 25/10/2008 06:00 109 4 205 2
Tableau 23 : Caractéristiques des épisodes de crue utilisés pour la correction des paramètres
du modèle par 'assimilation de données. QHp, débit de pointe horaire (m3/s) ; tr, temps de
réponse (temps entre le pic de pluie et le pic de débit) (h); P, cumul de pluie moyen (mm)
calculé selon la méthode de Thiessen.
Les pluies radar ont été utilisées pour simuler les épisodes d’octobre 2001, septembre
2003, septembre 2005 et octobre 2008 pour lesquels elles sont de bonne qualité. Pour les
autres épisodes, les simulations ont été réalisées avec les pluies au sol.
2.2. Application de la procédure d’assimilation
2.2.1. Détermination de xb, yo, B et R
L’étude de sensibilité menée au chapitre 5 section 3.1 a permis d’identifier les
paramètres auxquels les débits simulés sont les plus sensibles. Il s’agit du paramètre S qui
influence le plus les amplitudes des débits de crue et du paramètre V qui influence le plus leur
temps d’arrivée. Le vecteur de contrôle x ne contiendra donc que les 2 paramètres les plus
sensibles : S et V. Leurs valeurs a priori sont stockées dans le vecteur d’ébauche xb = [S
b, V
b]
T.
Sb est donné par la régression linéaire entre S et Hu2 et V
b correspond à la valeur moyenne de
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 171 -
V obtenue après calibration. L’écart-type de l’erreur commise sur Sb a été fixé à 19% de S
b. Ce
pourcentage correspond au rapport de la moyenne des résidus de la régression linéaire sur la
moyenne des valeurs calibrées de S. L’écart-type de l’erreur commise sur Vb est fixée à 0.2
m/s, valeur de l’écart-type obtenu après la calibration événement par événement. On suppose
que les erreurs sur Sb et V
b sont décorrélées.
Les observations utilisées, stockées dans le vecteur yo, correspondent aux n premiers
débits observés depuis le début d’un épisode à l’exutoire du bassin. Les erreurs sur les débits
observés sont supposées décorrélées. Du fait de l’extrapolation de la courbe de tarage, l’erreur
de mesure sur les débits forts (> 300 m3/s) est supposée importante. L’erreur de
représentativité est supposée importante sur les débits faibles que le modèle n’arrive pas à
reproduire correctement. Une erreur d’observation importante a donc été attribuée aux débits
pour lesquels l’une ou l’autre de ces 2 erreurs étaient importantes. Nous avons retenus les
seuils suivants :
- Pour un débit observé très fort (supérieur à 300 m3/s), l’écart-type associé est infini,
car l’erreur commise sur la courbe de tarage par extrapolation est importante
- Pour un débit observé faible (inférieur à 20 m3/s), l’écart-type associé est infini, car
le modèle hydrologique n’a été calé que sur les débits de crue
- Enfin, pour un débit observé compris entre 20 et 300 m3/s, l’écart-type associé est de
20 m3/s. Cette valeur a été retenue suite à une étude de sensibilité effectuée sur R (chapitre 6
section 2.3.4.).
2.2.2. Critères d’évaluation
Le paramètre S jouant sur l’intensité du pic de crue, le gain de l'assimilation est évalué
avec un critère portant sur le débit de pointe de la crue.
obs
obssim
RDPQp
QpQp E (Eq. 85)
où Qpobs est le débit de pointe observé Qpsim le débit de pointe simulé. Qpsim peut
correspondre au débit de pointe simulé avant assimilation (Qpb) ou à celui simulé après
assimilation (Qpa). ERDP est l’écart relatif au débit de pointe observé. Il peut être calculé avant
assimilation (ERDP, b) ou après assimilation (ERDP, a).
La comparaison de ERDP,a et ERDP,b permet de quantifier l’amélioration apportée par
assimilation de données.
Si (ERDP) = ERDP, a - ERDP, b < 0, la technique d’assimilation a réduit l’écart au débit de
pointe.
Si (ERDP) = ERDP, a - ERDP, b > 0, la technique d’assimilation a augmenté l’écart au débit de
pointe.
Le paramètre V jouant sur le temps d’arrivée du pic de crue, le gain apporté par
l’assimilation de données est aussi évalué avec un critère portant sur le temps d’arrivée du
débit de pointe.
tp =| tpsim – tpobs| (Eq. 86)
où tpobs est le temps d’arrivée du débit de pointe observé et tpsim est le temps d’arrivée du
débit de pointe simulé. tpsim peut correspondre au temps d’arrivée du débit de pointe simulé
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 172 -
avant assimilation (tpb) ou après assimilation (tpa). tp est le décalage en temps existant entre
le débit de pointe calculé et le débit de pointe observé. Ce décalage peut être calculé avant
assimilation (tpb) ou après assimilation (tpa).
tpb et tpa quantifient l’avance ou le retard qu’a le pic simulé sur le pic observé. Leur
comparaison permet de quantifier l’amélioration apportée par assimilation de données.
Si (tp) = tpa - tpb < 0, la technique d’assimilation a réduit le décalage en temps entre les
pics simulé et observé.
Si (tp) = tpa - tpb > 0, la technique d’assimilation a augmenté le décalage en temps entre
les pics simulé et observé.
2.2.3. Efficacité en mode « prévision »
L’objectif est ici d’améliorer la prévision du pic de crue. La procédure d’assimilation
de données est donc testée dans une optique de prévision : l’assimilation des débits observés
s’effectue depuis le début de l’épisode jusqu’à une date t0, située 3h avant le pic de crue. A
partir de cette date, l’assimilation s’arrête et la prévision commence. La figure 72 illustre le
mode de fonctionnement de la technique d’assimilation pour l’épisode d’octobre 2001. Cette
dernière fonctionne pendant la « période d’assimilation » qui s’étend du début de l’épisode
jusqu’à l’observation située 3h avant le pic de crue. De cette date jusqu’à la fin de l’épisode,
le modèle fonctionne seul en prévision : c’est la période de prévision. Les débits simulés sur
cette période sont calculés en utilisant l'ensemble des pluies observées sur la totalité de
l'épisode (hypothèse de pluie future connue).
Pour illustrer l’efficacité de la procédure d’assimilation, les résultats de l’épisode
d’octobre 2001 sont présentés (figure 72). Pour cet exemple, une seule donnée de débit est
assimilée 3h avant le pic de crue. Dans cet exemple, le vecteur de contrôle ne contient que S.
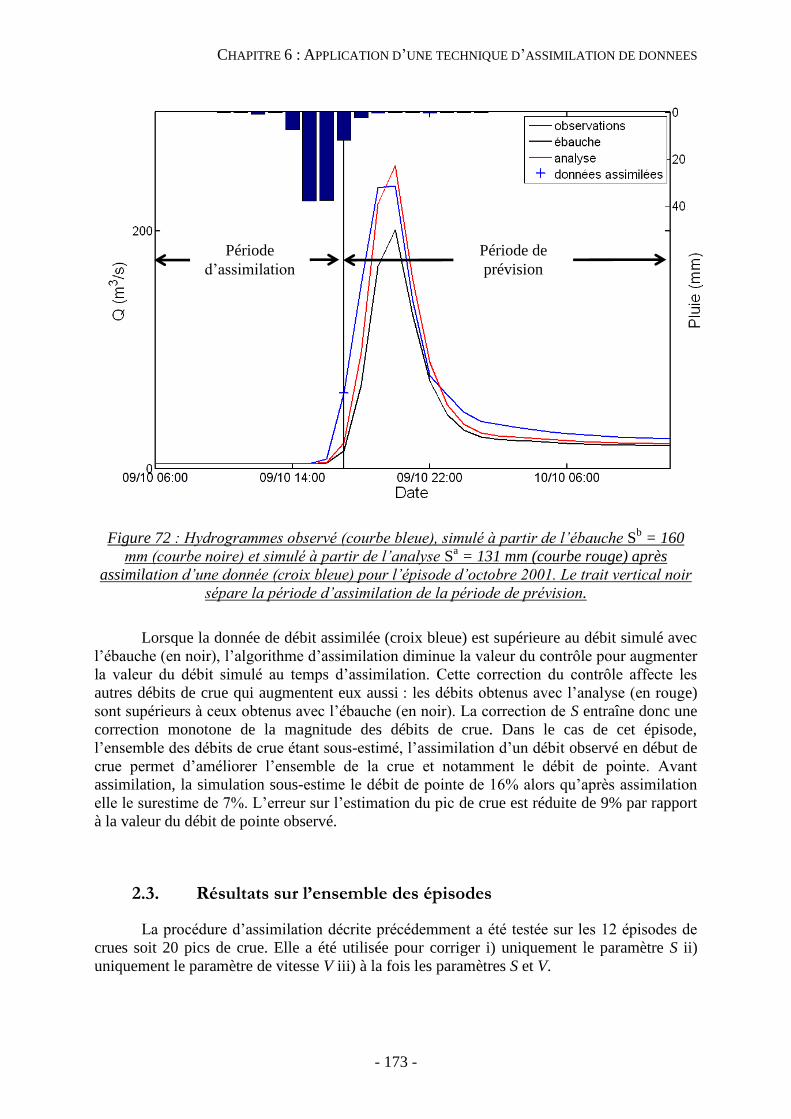
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 173 -
Figure 72 : Hydrogrammes observé (courbe bleue), simulé à partir de l’ébauche Sb = 160
mm (courbe noire) et simulé à partir de l’analyse Sa = 131 mm (courbe rouge) après
assimilation d’une donnée (croix bleue) pour l’épisode d’octobre 2001. Le trait vertical noir
sépare la période d’assimilation de la période de prévision.
Lorsque la donnée de débit assimilée (croix bleue) est supérieure au débit simulé avec
l’ébauche (en noir), l’algorithme d’assimilation diminue la valeur du contrôle pour augmenter
la valeur du débit simulé au temps d’assimilation. Cette correction du contrôle affecte les
autres débits de crue qui augmentent eux aussi : les débits obtenus avec l’analyse (en rouge)
sont supérieurs à ceux obtenus avec l’ébauche (en noir). La correction de S entraîne donc une
correction monotone de la magnitude des débits de crue. Dans le cas de cet épisode,
l’ensemble des débits de crue étant sous-estimé, l’assimilation d’un débit observé en début de
crue permet d’améliorer l’ensemble de la crue et notamment le débit de pointe. Avant
assimilation, la simulation sous-estime le débit de pointe de 16% alors qu’après assimilation
elle le surestime de 7%. L’erreur sur l’estimation du pic de crue est réduite de 9% par rapport
à la valeur du débit de pointe observé.
2.3. Résultats sur l’ensemble des épisodes
La procédure d’assimilation décrite précédemment a été testée sur les 12 épisodes de
crues soit 20 pics de crue. Elle a été utilisée pour corriger i) uniquement le paramètre S ii)
uniquement le paramètre de vitesse V iii) à la fois les paramètres S et V.
Période
d’assimilation
Période de
prévision
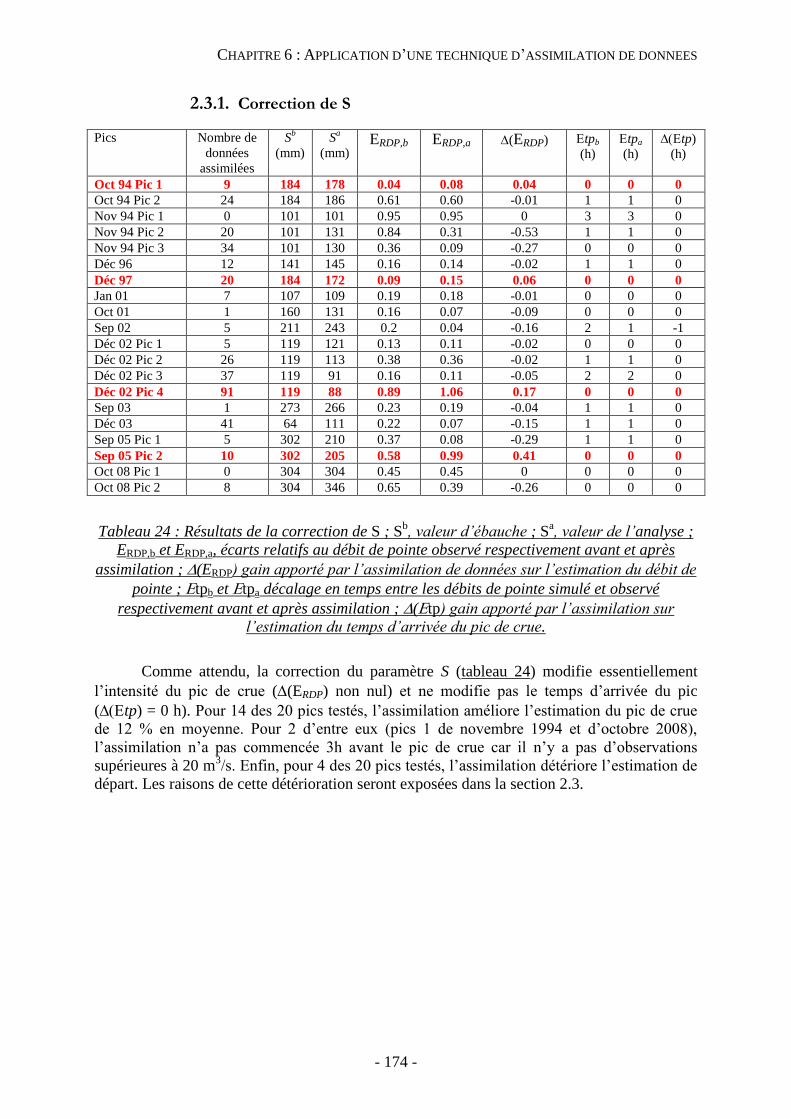
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 174 -
2.3.1. Correction de S
Pics Nombre de
données
assimilées
Sb
(mm)
Sa
(mm) ERDP,b
ERDP,a
(ERDP) tpb
(h)
tpa
(h)
tp)
(h)
Oct 94 Pic 1 9 184 178 0.04 0.08 0.04 0 0 0
Oct 94 Pic 2 24 184 186 0.61 0.60 -0.01 1 1 0
Nov 94 Pic 1 0 101 101 0.95 0.95 0 3 3 0
Nov 94 Pic 2 20 101 131 0.84 0.31 -0.53 1 1 0
Nov 94 Pic 3 34 101 130 0.36 0.09 -0.27 0 0 0
Déc 96 12 141 145 0.16 0.14 -0.02 1 1 0
Déc 97 20 184 172 0.09 0.15 0.06 0 0 0
Jan 01 7 107 109 0.19 0.18 -0.01 0 0 0
Oct 01 1 160 131 0.16 0.07 -0.09 0 0 0
Sep 02 5 211 243 0.2 0.04 -0.16 2 1 -1
Déc 02 Pic 1 5 119 121 0.13 0.11 -0.02 0 0 0
Déc 02 Pic 2 26 119 113 0.38 0.36 -0.02 1 1 0
Déc 02 Pic 3 37 119 91 0.16 0.11 -0.05 2 2 0
Déc 02 Pic 4 91 119 88 0.89 1.06 0.17 0 0 0
Sep 03 1 273 266 0.23 0.19 -0.04 1 1 0
Déc 03 41 64 111 0.22 0.07 -0.15 1 1 0
Sep 05 Pic 1 5 302 210 0.37 0.08 -0.29 1 1 0
Sep 05 Pic 2 10 302 205 0.58 0.99 0.41 0 0 0
Oct 08 Pic 1 0 304 304 0.45 0.45 0 0 0 0
Oct 08 Pic 2 8 304 346 0.65 0.39 -0.26 0 0 0
Tableau 24 : Résultats de la correction de S ; Sb, valeur d’ébauche ; S
a, valeur de l’analyse ;
ERDP,b et ERDP,a, écarts relatifs au débit de pointe observé respectivement avant et après
assimilation ; (ERDP) gain apporté par l’assimilation de données sur l’estimation du débit de
pointe ; tpb et tpa décalage en temps entre les débits de pointe simulé et observé
respectivement avant et après assimilation ; (tp) gain apporté par l’assimilation sur
l’estimation du temps d’arrivée du pic de crue.
Comme attendu, la correction du paramètre S (tableau 24) modifie essentiellement
l’intensité du pic de crue ((ERDP) non nul) et ne modifie pas le temps d’arrivée du pic
(tp) = 0 h). Pour 14 des 20 pics testés, l’assimilation améliore l’estimation du pic de crue
de 12 % en moyenne. Pour 2 d’entre eux (pics 1 de novembre 1994 et d’octobre 2008),
l’assimilation n’a pas commencée 3h avant le pic de crue car il n’y a pas d’observations
supérieures à 20 m3/s. Enfin, pour 4 des 20 pics testés, l’assimilation détériore l’estimation de
départ. Les raisons de cette détérioration seront exposées dans la section 2.3.
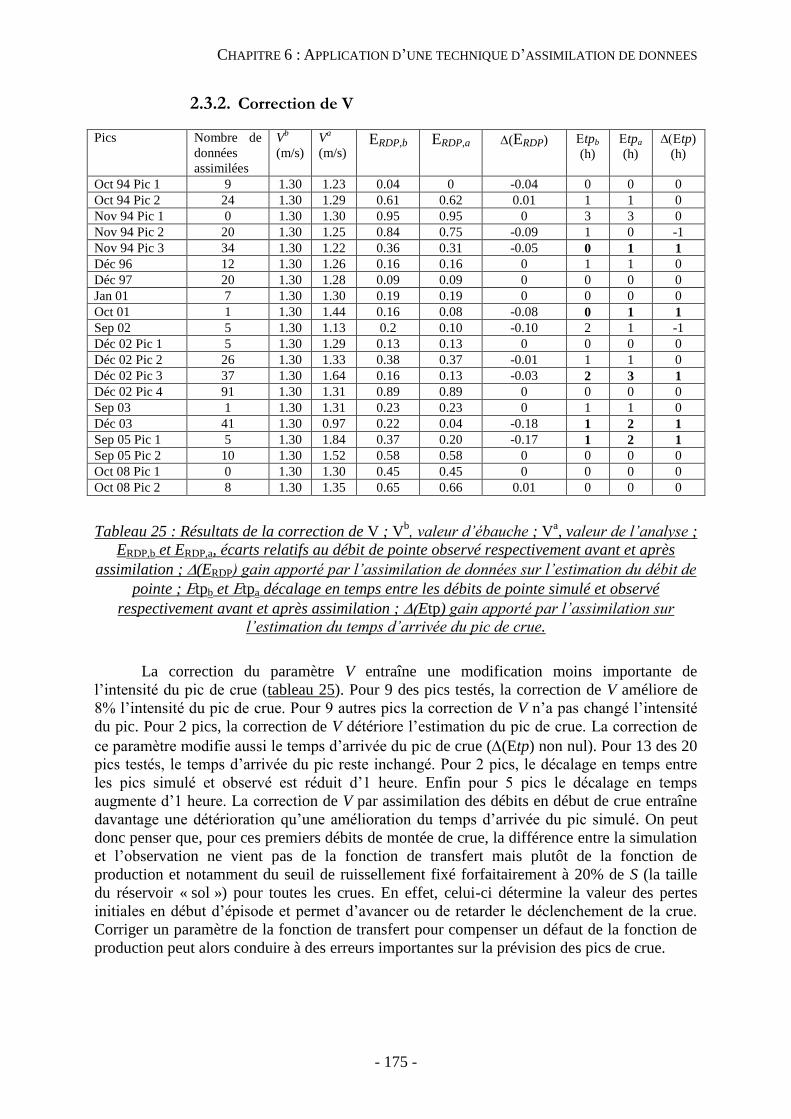
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 175 -
2.3.2. Correction de V
Pics Nombre de
données
assimilées
Vb
(m/s)
Va
(m/s) ERDP,b
ERDP,a
(ERDP) tpb
(h)
tpa
(h)
tp)
(h)
Oct 94 Pic 1 9 1.30 1.23 0.04 0 -0.04 0 0 0
Oct 94 Pic 2 24 1.30 1.29 0.61 0.62 0.01 1 1 0
Nov 94 Pic 1 0 1.30 1.30 0.95 0.95 0 3 3 0
Nov 94 Pic 2 20 1.30 1.25 0.84 0.75 -0.09 1 0 -1
Nov 94 Pic 3 34 1.30 1.22 0.36 0.31 -0.05 0 1 1
Déc 96 12 1.30 1.26 0.16 0.16 0 1 1 0
Déc 97 20 1.30 1.28 0.09 0.09 0 0 0 0
Jan 01 7 1.30 1.30 0.19 0.19 0 0 0 0
Oct 01 1 1.30 1.44 0.16 0.08 -0.08 0 1 1
Sep 02 5 1.30 1.13 0.2 0.10 -0.10 2 1 -1
Déc 02 Pic 1 5 1.30 1.29 0.13 0.13 0 0 0 0
Déc 02 Pic 2 26 1.30 1.33 0.38 0.37 -0.01 1 1 0
Déc 02 Pic 3 37 1.30 1.64 0.16 0.13 -0.03 2 3 1
Déc 02 Pic 4 91 1.30 1.31 0.89 0.89 0 0 0 0
Sep 03 1 1.30 1.31 0.23 0.23 0 1 1 0
Déc 03 41 1.30 0.97 0.22 0.04 -0.18 1 2 1
Sep 05 Pic 1 5 1.30 1.84 0.37 0.20 -0.17 1 2 1
Sep 05 Pic 2 10 1.30 1.52 0.58 0.58 0 0 0 0
Oct 08 Pic 1 0 1.30 1.30 0.45 0.45 0 0 0 0
Oct 08 Pic 2 8 1.30 1.35 0.65 0.66 0.01 0 0 0
Tableau 25 : Résultats de la correction de V ; Vb, valeur d’ébauche ; V
a, valeur de l’analyse ;
ERDP,b et ERDP,a, écarts relatifs au débit de pointe observé respectivement avant et après
assimilation ; (ERDP) gain apporté par l’assimilation de données sur l’estimation du débit de
pointe ; tpb et tpa décalage en temps entre les débits de pointe simulé et observé
respectivement avant et après assimilation ; Etp) gain apporté par l’assimilation sur
l’estimation du temps d’arrivée du pic de crue.
La correction du paramètre V entraîne une modification moins importante de
l’intensité du pic de crue (tableau 25). Pour 9 des pics testés, la correction de V améliore de
8% l’intensité du pic de crue. Pour 9 autres pics la correction de V n’a pas changé l’intensité
du pic. Pour 2 pics, la correction de V détériore l’estimation du pic de crue. La correction de
ce paramètre modifie aussi le temps d’arrivée du pic de crue ((Etp) non nul). Pour 13 des 20
pics testés, le temps d’arrivée du pic reste inchangé. Pour 2 pics, le décalage en temps entre
les pics simulé et observé est réduit d’1 heure. Enfin pour 5 pics le décalage en temps
augmente d’1 heure. La correction de V par assimilation des débits en début de crue entraîne
davantage une détérioration qu’une amélioration du temps d’arrivée du pic simulé. On peut
donc penser que, pour ces premiers débits de montée de crue, la différence entre la simulation
et l’observation ne vient pas de la fonction de transfert mais plutôt de la fonction de
production et notamment du seuil de ruissellement fixé forfaitairement à 20% de S (la taille
du réservoir « sol ») pour toutes les crues. En effet, celui-ci détermine la valeur des pertes
initiales en début d’épisode et permet d’avancer ou de retarder le déclenchement de la crue.
Corriger un paramètre de la fonction de transfert pour compenser un défaut de la fonction de
production peut alors conduire à des erreurs importantes sur la prévision des pics de crue.
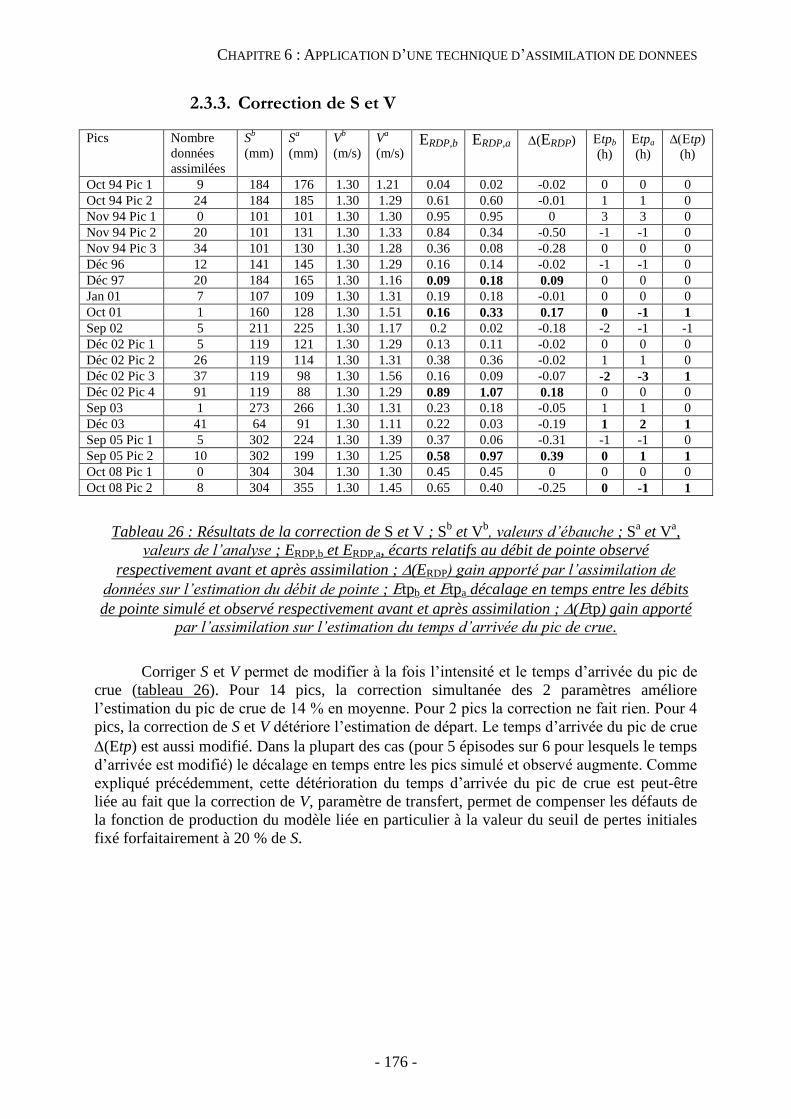
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 176 -
2.3.3. Correction de S et V
Pics Nombre
données
assimilées
Sb
(mm)
Sa
(mm)
Vb
(m/s)
Va
(m/s) ERDP,b
ERDP,a
(ERDP) tpb
(h)
tpa
(h)
tp)
(h)
Oct 94 Pic 1 9 184 176 1.30 1.21 0.04 0.02 -0.02 0 0 0
Oct 94 Pic 2 24 184 185 1.30 1.29 0.61 0.60 -0.01 1 1 0
Nov 94 Pic 1 0 101 101 1.30 1.30 0.95 0.95 0 3 3 0
Nov 94 Pic 2 20 101 131 1.30 1.33 0.84 0.34 -0.50 -1 -1 0
Nov 94 Pic 3 34 101 130 1.30 1.28 0.36 0.08 -0.28 0 0 0
Déc 96 12 141 145 1.30 1.29 0.16 0.14 -0.02 -1 -1 0
Déc 97 20 184 165 1.30 1.16 0.09 0.18 0.09 0 0 0
Jan 01 7 107 109 1.30 1.31 0.19 0.18 -0.01 0 0 0
Oct 01 1 160 128 1.30 1.51 0.16 0.33 0.17 0 -1 1
Sep 02 5 211 225 1.30 1.17 0.2 0.02 -0.18 -2 -1 -1
Déc 02 Pic 1 5 119 121 1.30 1.29 0.13 0.11 -0.02 0 0 0
Déc 02 Pic 2 26 119 114 1.30 1.31 0.38 0.36 -0.02 1 1 0
Déc 02 Pic 3 37 119 98 1.30 1.56 0.16 0.09 -0.07 -2 -3 1
Déc 02 Pic 4 91 119 88 1.30 1.29 0.89 1.07 0.18 0 0 0
Sep 03 1 273 266 1.30 1.31 0.23 0.18 -0.05 1 1 0
Déc 03 41 64 91 1.30 1.11 0.22 0.03 -0.19 1 2 1
Sep 05 Pic 1 5 302 224 1.30 1.39 0.37 0.06 -0.31 -1 -1 0
Sep 05 Pic 2 10 302 199 1.30 1.25 0.58 0.97 0.39 0 1 1
Oct 08 Pic 1 0 304 304 1.30 1.30 0.45 0.45 0 0 0 0
Oct 08 Pic 2 8 304 355 1.30 1.45 0.65 0.40 -0.25 0 -1 1
Tableau 26 : Résultats de la correction de S et V ; Sb et V
b, valeurs d’ébauche ; S
a et V
a,
valeurs de l’analyse ; ERDP,b et ERDP,a, écarts relatifs au débit de pointe observé
respectivement avant et après assimilation ; (ERDP) gain apporté par l’assimilation de
données sur l’estimation du débit de pointe ; tpb et tpa décalage en temps entre les débits
de pointe simulé et observé respectivement avant et après assimilation ; (tp) gain apporté
par l’assimilation sur l’estimation du temps d’arrivée du pic de crue.
Corriger S et V permet de modifier à la fois l’intensité et le temps d’arrivée du pic de
crue (tableau 26). Pour 14 pics, la correction simultanée des 2 paramètres améliore
l’estimation du pic de crue de 14 % en moyenne. Pour 2 pics la correction ne fait rien. Pour 4
pics, la correction de S et V détériore l’estimation de départ. Le temps d’arrivée du pic de crue
(Etp) est aussi modifié. Dans la plupart des cas (pour 5 épisodes sur 6 pour lesquels le temps
d’arrivée est modifié) le décalage en temps entre les pics simulé et observé augmente. Comme
expliqué précédemment, cette détérioration du temps d’arrivée du pic de crue est peut-être
liée au fait que la correction de V, paramètre de transfert, permet de compenser les défauts de
la fonction de production du modèle liée en particulier à la valeur du seuil de pertes initiales
fixé forfaitairement à 20 % de S.
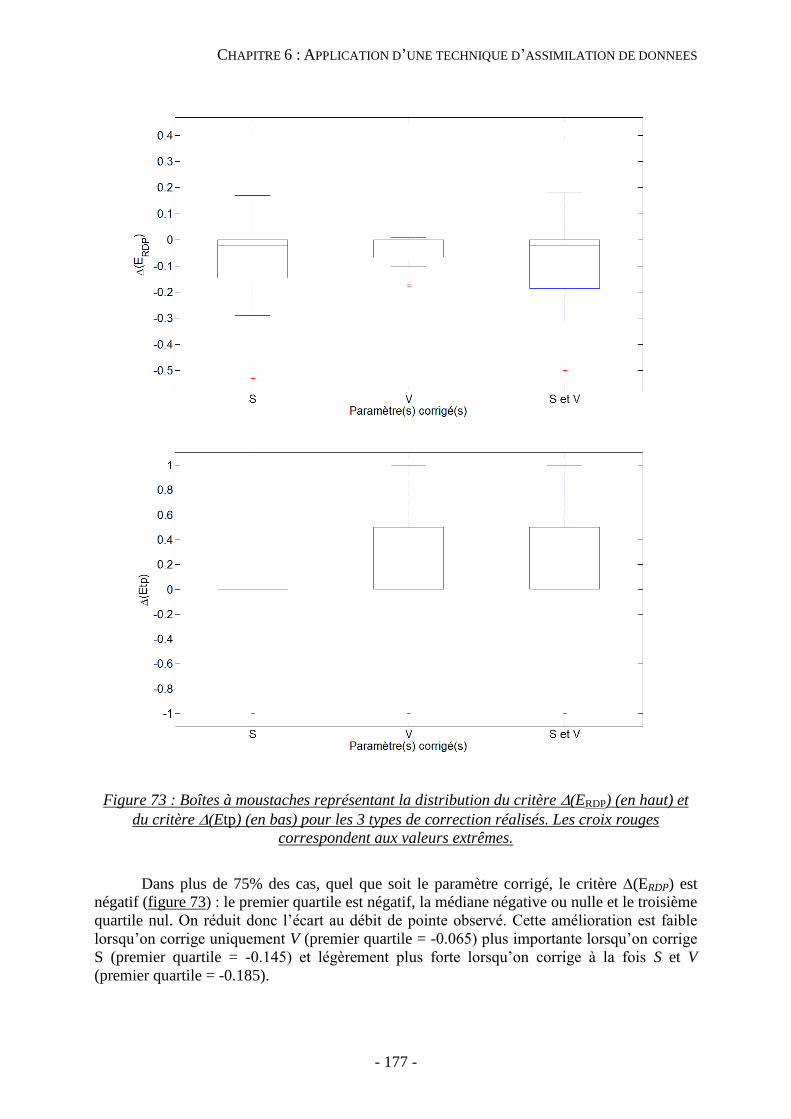
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 177 -
Figure 73 : Boîtes à moustaches représentant la distribution du critère (ERDP) (en haut) et
du critère (Etp) (en bas) pour les 3 types de correction réalisés. Les croix rouges
correspondent aux valeurs extrêmes.
Dans plus de 75% des cas, quel que soit le paramètre corrigé, le critère (ERDP) est
négatif (figure 73) : le premier quartile est négatif, la médiane négative ou nulle et le troisième
quartile nul. On réduit donc l’écart au débit de pointe observé. Cette amélioration est faible
lorsqu’on corrige uniquement V (premier quartile = -0.065) plus importante lorsqu’on corrige
S (premier quartile = -0.145) et légèrement plus forte lorsqu’on corrige à la fois S et V
(premier quartile = -0.185).
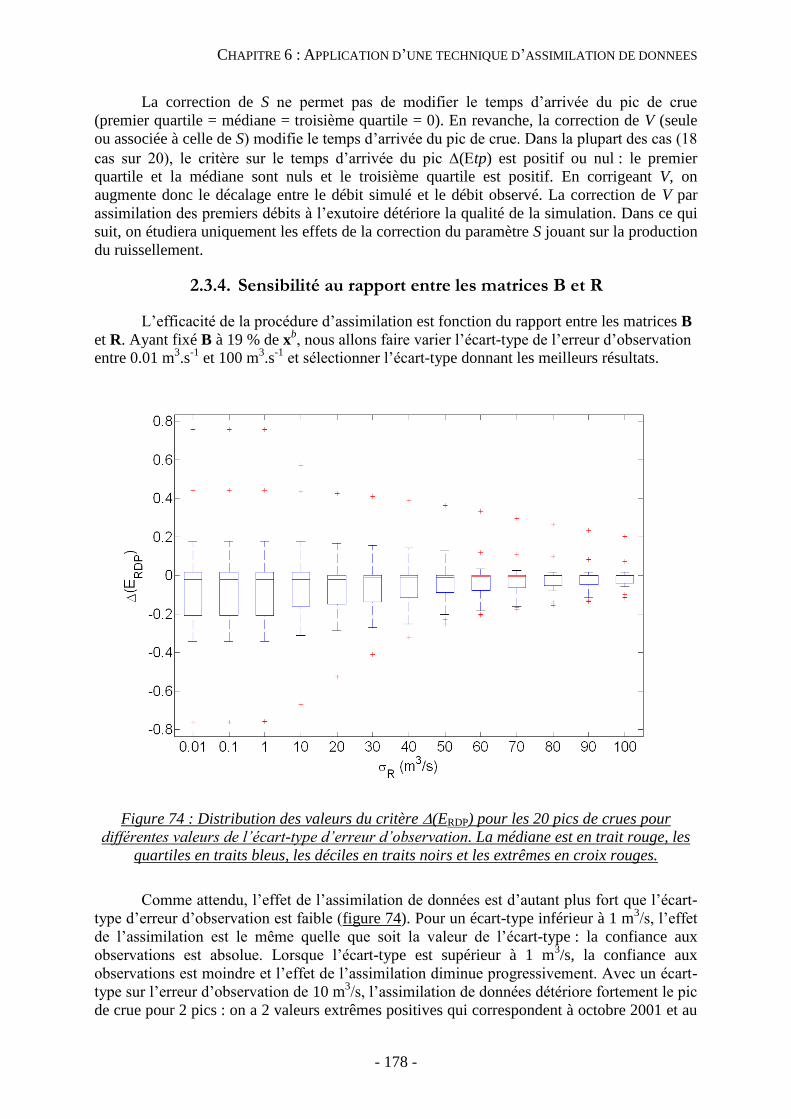
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 178 -
La correction de S ne permet pas de modifier le temps d’arrivée du pic de crue
(premier quartile = médiane = troisième quartile = 0). En revanche, la correction de V (seule
ou associée à celle de S) modifie le temps d’arrivée du pic de crue. Dans la plupart des cas (18
cas sur 20), le critère sur le temps d’arrivée du pic (tp) est positif ou nul : le premier
quartile et la médiane sont nuls et le troisième quartile est positif. En corrigeant V, on
augmente donc le décalage entre le débit simulé et le débit observé. La correction de V par
assimilation des premiers débits à l’exutoire détériore la qualité de la simulation. Dans ce qui
suit, on étudiera uniquement les effets de la correction du paramètre S jouant sur la production
du ruissellement.
2.3.4. Sensibilité au rapport entre les matrices B et R
L’efficacité de la procédure d’assimilation est fonction du rapport entre les matrices B
et R. Ayant fixé B à 19 % de xb, nous allons faire varier l’écart-type de l’erreur d’observation
entre 0.01 m3.s
-1 et 100 m
3.s
-1 et sélectionner l’écart-type donnant les meilleurs résultats.
Figure 74 : Distribution des valeurs du critère (ERDP) pour les 20 pics de crues pour
différentes valeurs de l’écart-type d’erreur d’observation. La médiane est en trait rouge, les
quartiles en traits bleus, les déciles en traits noirs et les extrêmes en croix rouges.
Comme attendu, l’effet de l’assimilation de données est d’autant plus fort que l’écart-
type d’erreur d’observation est faible (figure 74). Pour un écart-type inférieur à 1 m3/s, l’effet
de l’assimilation est le même quelle que soit la valeur de l’écart-type : la confiance aux
observations est absolue. Lorsque l’écart-type est supérieur à 1 m3/s, la confiance aux
observations est moindre et l’effet de l’assimilation diminue progressivement. Avec un écart-
type sur l’erreur d’observation de 10 m3/s, l’assimilation de données détériore fortement le pic
de crue pour 2 pics : on a 2 valeurs extrêmes positives qui correspondent à octobre 2001 et au
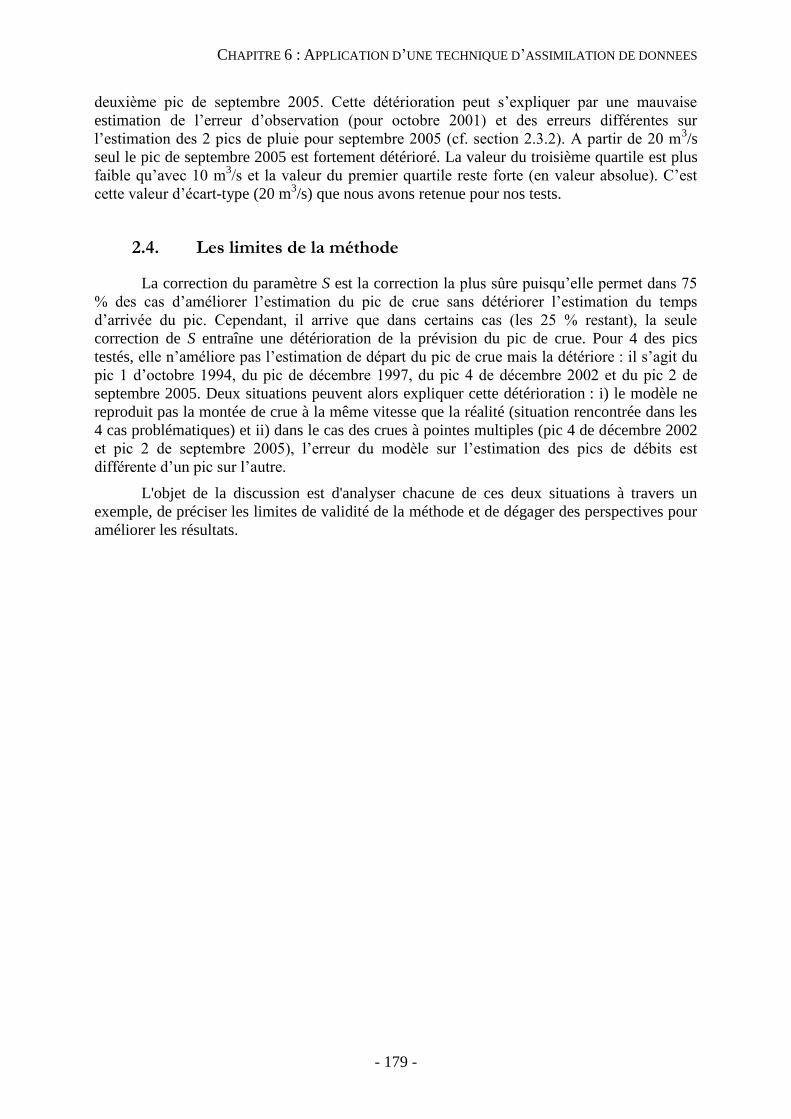
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 179 -
deuxième pic de septembre 2005. Cette détérioration peut s’expliquer par une mauvaise
estimation de l’erreur d’observation (pour octobre 2001) et des erreurs différentes sur
l’estimation des 2 pics de pluie pour septembre 2005 (cf. section 2.3.2). A partir de 20 m3/s
seul le pic de septembre 2005 est fortement détérioré. La valeur du troisième quartile est plus
faible qu’avec 10 m3/s et la valeur du premier quartile reste forte (en valeur absolue). C’est
cette valeur d’écart-type (20 m3/s) que nous avons retenue pour nos tests.
2.4. Les limites de la méthode
La correction du paramètre S est la correction la plus sûre puisqu’elle permet dans 75
% des cas d’améliorer l’estimation du pic de crue sans détériorer l’estimation du temps
d’arrivée du pic. Cependant, il arrive que dans certains cas (les 25 % restant), la seule
correction de S entraîne une détérioration de la prévision du pic de crue. Pour 4 des pics
testés, elle n’améliore pas l’estimation de départ du pic de crue mais la détériore : il s’agit du
pic 1 d’octobre 1994, du pic de décembre 1997, du pic 4 de décembre 2002 et du pic 2 de
septembre 2005. Deux situations peuvent alors expliquer cette détérioration : i) le modèle ne
reproduit pas la montée de crue à la même vitesse que la réalité (situation rencontrée dans les
4 cas problématiques) et ii) dans le cas des crues à pointes multiples (pic 4 de décembre 2002
et pic 2 de septembre 2005), l’erreur du modèle sur l’estimation des pics de débits est
différente d’un pic sur l’autre.
L'objet de la discussion est d'analyser chacune de ces deux situations à travers un
exemple, de préciser les limites de validité de la méthode et de dégager des perspectives pour
améliorer les résultats.
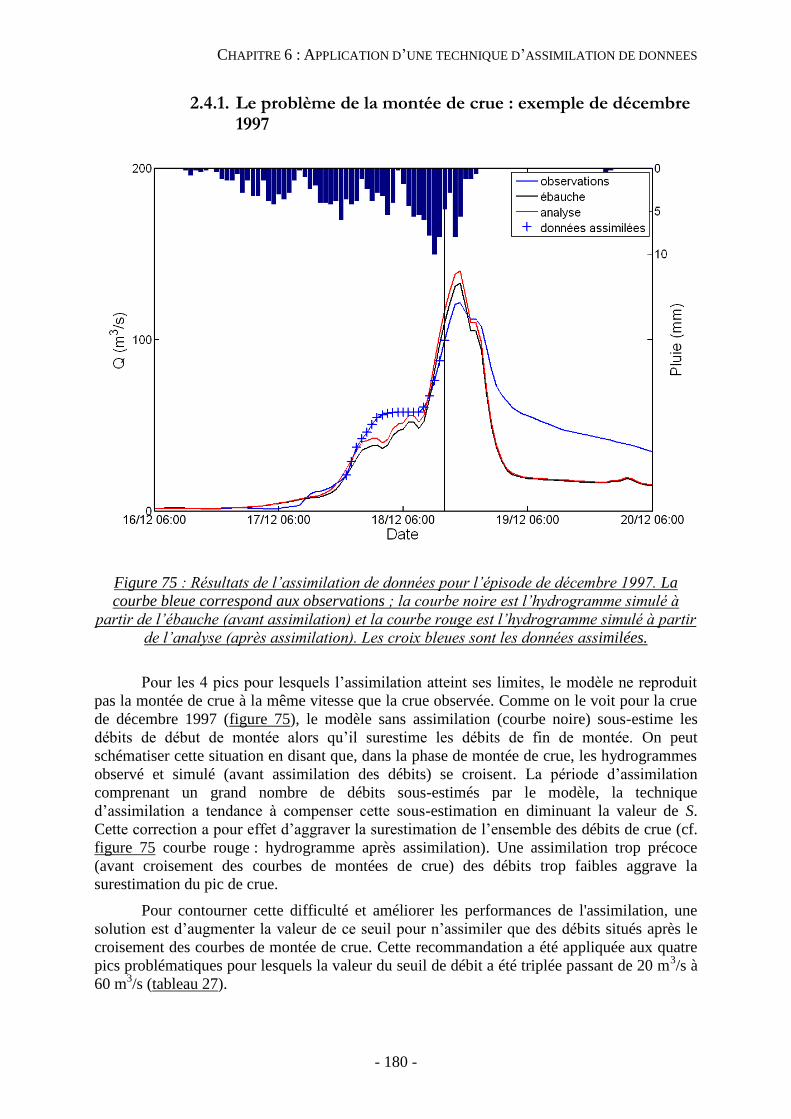
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 180 -
2.4.1. Le problème de la montée de crue : exemple de décembre 1997
Figure 75 : Résultats de l’assimilation de données pour l’épisode de décembre 1997. La
courbe bleue correspond aux observations ; la courbe noire est l’hydrogramme simulé à
partir de l’ébauche (avant assimilation) et la courbe rouge est l’hydrogramme simulé à partir
de l’analyse (après assimilation). Les croix bleues sont les données assimilées.
Pour les 4 pics pour lesquels l’assimilation atteint ses limites, le modèle ne reproduit
pas la montée de crue à la même vitesse que la crue observée. Comme on le voit pour la crue
de décembre 1997 (figure 75), le modèle sans assimilation (courbe noire) sous-estime les
débits de début de montée alors qu’il surestime les débits de fin de montée. On peut
schématiser cette situation en disant que, dans la phase de montée de crue, les hydrogrammes
observé et simulé (avant assimilation des débits) se croisent. La période d’assimilation
comprenant un grand nombre de débits sous-estimés par le modèle, la technique
d’assimilation a tendance à compenser cette sous-estimation en diminuant la valeur de S.
Cette correction a pour effet d’aggraver la surestimation de l’ensemble des débits de crue (cf.
figure 75 courbe rouge : hydrogramme après assimilation). Une assimilation trop précoce
(avant croisement des courbes de montées de crue) des débits trop faibles aggrave la
surestimation du pic de crue.
Pour contourner cette difficulté et améliorer les performances de l'assimilation, une
solution est d’augmenter la valeur de ce seuil pour n’assimiler que des débits situés après le
croisement des courbes de montée de crue. Cette recommandation a été appliquée aux quatre
pics problématiques pour lesquels la valeur du seuil de débit a été triplée passant de 20 m3/s à
60 m3/s (tableau 27).
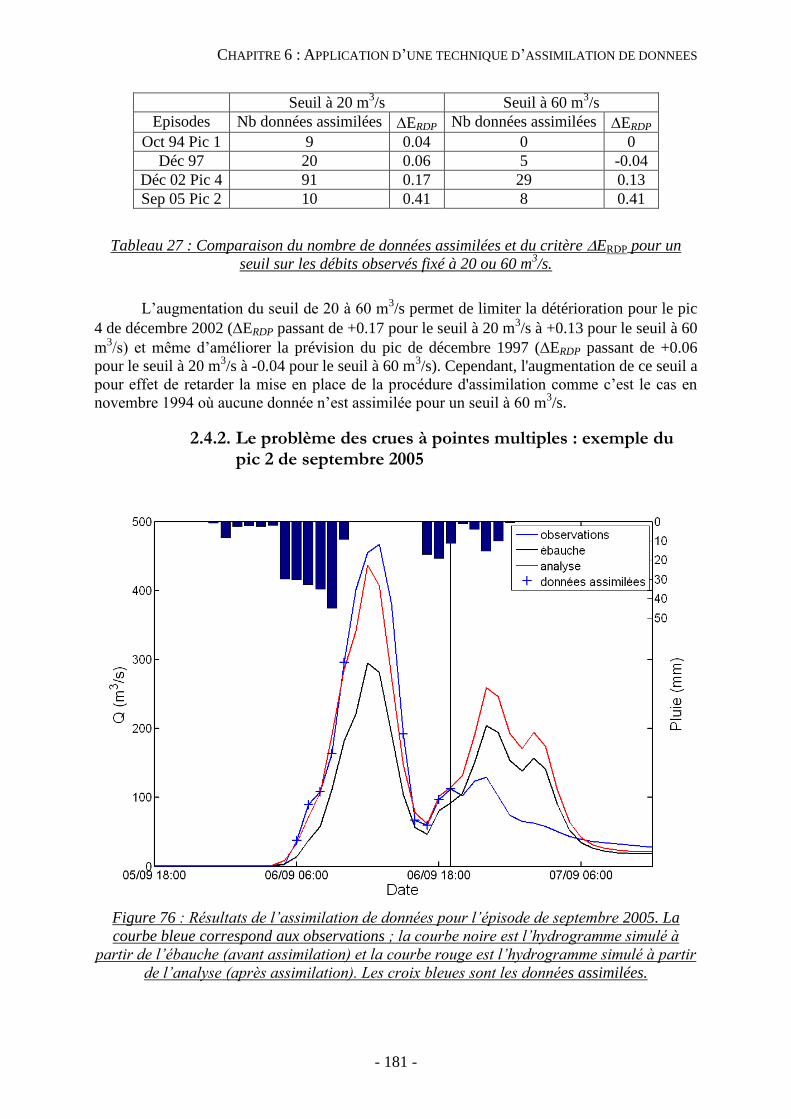
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 181 -
Seuil à 20 m3/s Seuil à 60 m
3/s
Episodes Nb données assimilées ERDP Nb données assimilées ERDP
Oct 94 Pic 1 9 0.04 0 0
Déc 97 20 0.06 5 -0.04
Déc 02 Pic 4 91 0.17 29 0.13
Sep 05 Pic 2 10 0.41 8 0.41
Tableau 27 : Comparaison du nombre de données assimilées et du critère ERDP pour un
seuil sur les débits observés fixé à 20 ou 60 m3/s.
L’augmentation du seuil de 20 à 60 m3/s permet de limiter la détérioration pour le pic
4 de décembre 2002 (ERDP passant de +0.17 pour le seuil à 20 m3/s à +0.13 pour le seuil à 60
m3/s) et même d’améliorer la prévision du pic de décembre 1997 (ERDP passant de +0.06
pour le seuil à 20 m3/s à -0.04 pour le seuil à 60 m
3/s). Cependant, l'augmentation de ce seuil a
pour effet de retarder la mise en place de la procédure d'assimilation comme c’est le cas en
novembre 1994 où aucune donnée n’est assimilée pour un seuil à 60 m3/s.
2.4.2. Le problème des crues à pointes multiples : exemple du pic 2 de septembre 2005
Figure 76 : Résultats de l’assimilation de données pour l’épisode de septembre 2005. La
courbe bleue correspond aux observations ; la courbe noire est l’hydrogramme simulé à
partir de l’ébauche (avant assimilation) et la courbe rouge est l’hydrogramme simulé à partir
de l’analyse (après assimilation). Les croix bleues sont les données assimilées.
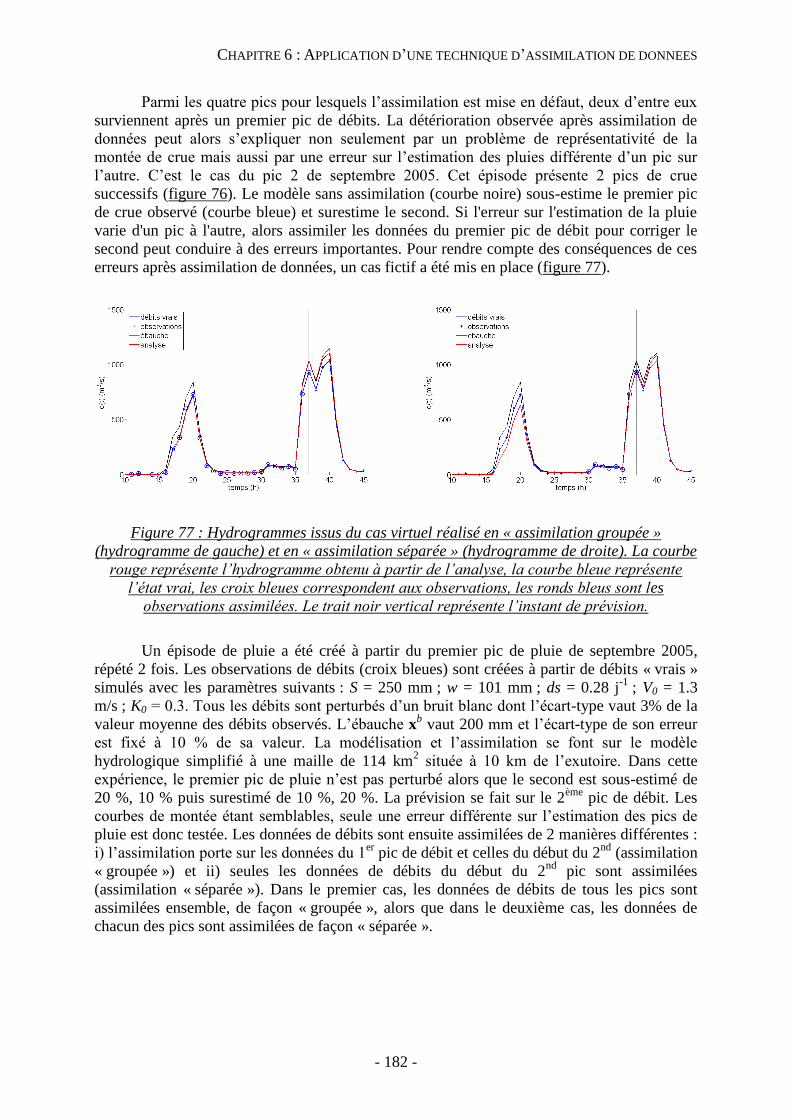
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 182 -
Parmi les quatre pics pour lesquels l’assimilation est mise en défaut, deux d’entre eux
surviennent après un premier pic de débits. La détérioration observée après assimilation de
données peut alors s’expliquer non seulement par un problème de représentativité de la
montée de crue mais aussi par une erreur sur l’estimation des pluies différente d’un pic sur
l’autre. C’est le cas du pic 2 de septembre 2005. Cet épisode présente 2 pics de crue
successifs (figure 76). Le modèle sans assimilation (courbe noire) sous-estime le premier pic
de crue observé (courbe bleue) et surestime le second. Si l'erreur sur l'estimation de la pluie
varie d'un pic à l'autre, alors assimiler les données du premier pic de débit pour corriger le
second peut conduire à des erreurs importantes. Pour rendre compte des conséquences de ces
erreurs après assimilation de données, un cas fictif a été mis en place (figure 77).
Figure 77 : Hydrogrammes issus du cas virtuel réalisé en « assimilation groupée »
(hydrogramme de gauche) et en « assimilation séparée » (hydrogramme de droite). La courbe
rouge représente l’hydrogramme obtenu à partir de l’analyse, la courbe bleue représente
l’état vrai, les croix bleues correspondent aux observations, les ronds bleus sont les
observations assimilées. Le trait noir vertical représente l’instant de prévision.
Un épisode de pluie a été créé à partir du premier pic de pluie de septembre 2005,
répété 2 fois. Les observations de débits (croix bleues) sont créées à partir de débits « vrais »
simulés avec les paramètres suivants : S = 250 mm ; w = 101 mm ; ds = 0.28 j-1
; V0 = 1.3
m/s ; K0 = 0.3. Tous les débits sont perturbés d’un bruit blanc dont l’écart-type vaut 3% de la
valeur moyenne des débits observés. L’ébauche xb vaut 200 mm et l’écart-type de son erreur
est fixé à 10 % de sa valeur. La modélisation et l’assimilation se font sur le modèle
hydrologique simplifié à une maille de 114 km2 située à 10 km de l’exutoire. Dans cette
expérience, le premier pic de pluie n’est pas perturbé alors que le second est sous-estimé de
20 %, 10 % puis surestimé de 10 %, 20 %. La prévision se fait sur le 2ème
pic de débit. Les
courbes de montée étant semblables, seule une erreur différente sur l’estimation des pics de
pluie est donc testée. Les données de débits sont ensuite assimilées de 2 manières différentes :
i) l’assimilation porte sur les données du 1er
pic de débit et celles du début du 2nd
(assimilation
« groupée ») et ii) seules les données de débits du début du 2nd
pic sont assimilées
(assimilation « séparée »). Dans le premier cas, les données de débits de tous les pics sont
assimilées ensemble, de façon « groupée », alors que dans le deuxième cas, les données de
chacun des pics sont assimilées de façon « séparée ».
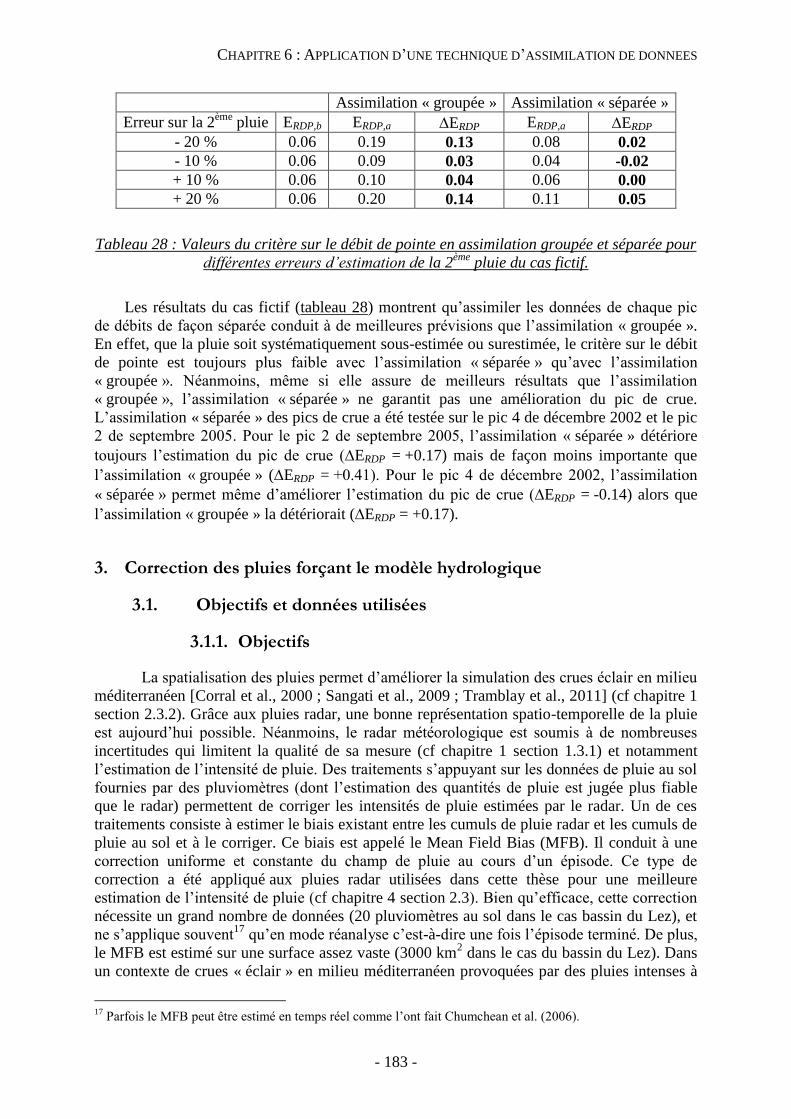
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 183 -
Assimilation « groupée » Assimilation « séparée »
Erreur sur la 2ème
pluie ERDP,b ERDP,a ERDP ERDP,a ERDP
- 20 % 0.06 0.19 0.13 0.08 0.02
- 10 % 0.06 0.09 0.03 0.04 -0.02
+ 10 % 0.06 0.10 0.04 0.06 0.00
+ 20 % 0.06 0.20 0.14 0.11 0.05
Tableau 28 : Valeurs du critère sur le débit de pointe en assimilation groupée et séparée pour
différentes erreurs d’estimation de la 2ème
pluie du cas fictif.
Les résultats du cas fictif (tableau 28) montrent qu’assimiler les données de chaque pic
de débits de façon séparée conduit à de meilleures prévisions que l’assimilation « groupée ».
En effet, que la pluie soit systématiquement sous-estimée ou surestimée, le critère sur le débit
de pointe est toujours plus faible avec l’assimilation « séparée » qu’avec l’assimilation
« groupée ». Néanmoins, même si elle assure de meilleurs résultats que l’assimilation
« groupée », l’assimilation « séparée » ne garantit pas une amélioration du pic de crue.
L’assimilation « séparée » des pics de crue a été testée sur le pic 4 de décembre 2002 et le pic
2 de septembre 2005. Pour le pic 2 de septembre 2005, l’assimilation « séparée » détériore
toujours l’estimation du pic de crue (ERDP = +0.17) mais de façon moins importante que
l’assimilation « groupée » (ERDP = +0.41). Pour le pic 4 de décembre 2002, l’assimilation
« séparée » permet même d’améliorer l’estimation du pic de crue (ERDP = -0.14) alors que
l’assimilation « groupée » la détériorait (ERDP = +0.17).
3. Correction des pluies forçant le modèle hydrologique
3.1. Objectifs et données utilisées
3.1.1. Objectifs
La spatialisation des pluies permet d’améliorer la simulation des crues éclair en milieu
méditerranéen [Corral et al., 2000 ; Sangati et al., 2009 ; Tramblay et al., 2011] (cf chapitre 1
section 2.3.2). Grâce aux pluies radar, une bonne représentation spatio-temporelle de la pluie
est aujourd’hui possible. Néanmoins, le radar météorologique est soumis à de nombreuses
incertitudes qui limitent la qualité de sa mesure (cf chapitre 1 section 1.3.1) et notamment
l’estimation de l’intensité de pluie. Des traitements s’appuyant sur les données de pluie au sol
fournies par des pluviomètres (dont l’estimation des quantités de pluie est jugée plus fiable
que le radar) permettent de corriger les intensités de pluie estimées par le radar. Un de ces
traitements consiste à estimer le biais existant entre les cumuls de pluie radar et les cumuls de
pluie au sol et à le corriger. Ce biais est appelé le Mean Field Bias (MFB). Il conduit à une
correction uniforme et constante du champ de pluie au cours d’un épisode. Ce type de
correction a été appliqué aux pluies radar utilisées dans cette thèse pour une meilleure
estimation de l’intensité de pluie (cf chapitre 4 section 2.3). Bien qu’efficace, cette correction
nécessite un grand nombre de données (20 pluviomètres au sol dans le cas bassin du Lez), et
ne s’applique souvent17
qu’en mode réanalyse c’est-à-dire une fois l’épisode terminé. De plus,
le MFB est estimé sur une surface assez vaste (3000 km2 dans le cas du bassin du Lez). Dans
un contexte de crues « éclair » en milieu méditerranéen provoquées par des pluies intenses à
17
Parfois le MFB peut être estimé en temps réel comme l’ont fait Chumchean et al. (2006).
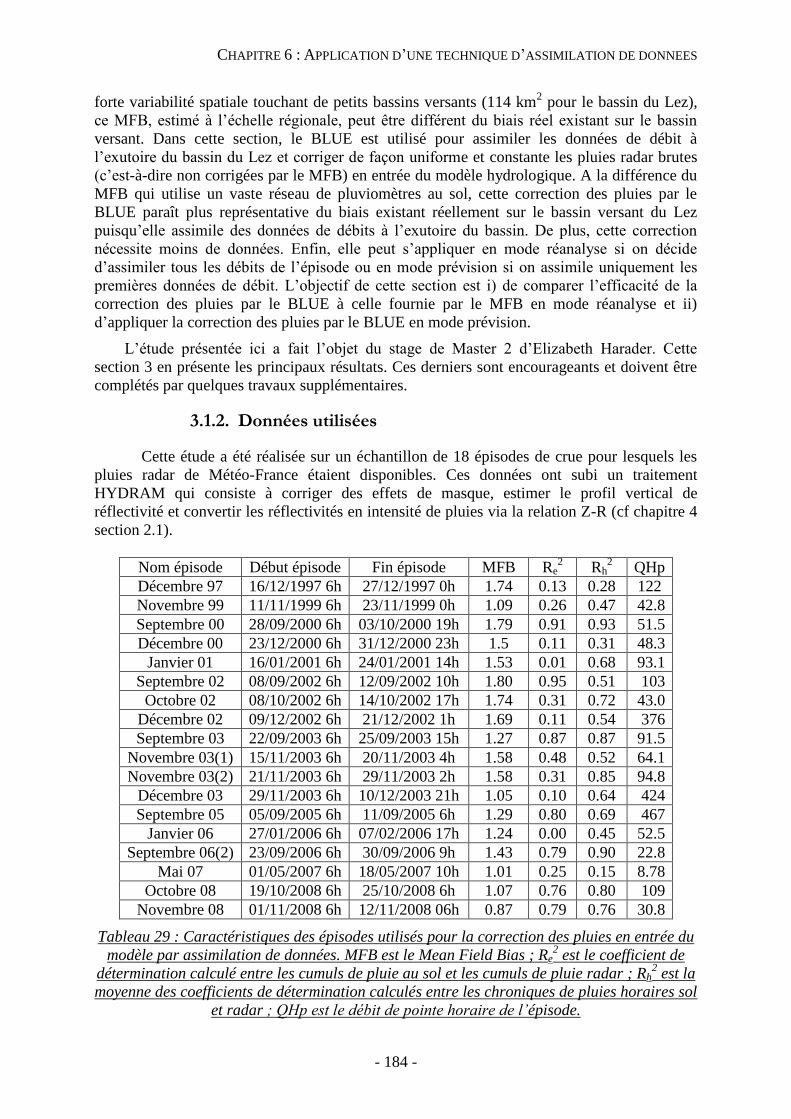
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 184 -
forte variabilité spatiale touchant de petits bassins versants (114 km2 pour le bassin du Lez),
ce MFB, estimé à l’échelle régionale, peut être différent du biais réel existant sur le bassin
versant. Dans cette section, le BLUE est utilisé pour assimiler les données de débit à
l’exutoire du bassin du Lez et corriger de façon uniforme et constante les pluies radar brutes
(c’est-à-dire non corrigées par le MFB) en entrée du modèle hydrologique. A la différence du
MFB qui utilise un vaste réseau de pluviomètres au sol, cette correction des pluies par le
BLUE paraît plus représentative du biais existant réellement sur le bassin versant du Lez
puisqu’elle assimile des données de débits à l’exutoire du bassin. De plus, cette correction
nécessite moins de données. Enfin, elle peut s’appliquer en mode réanalyse si on décide
d’assimiler tous les débits de l’épisode ou en mode prévision si on assimile uniquement les
premières données de débit. L’objectif de cette section est i) de comparer l’efficacité de la
correction des pluies par le BLUE à celle fournie par le MFB en mode réanalyse et ii)
d’appliquer la correction des pluies par le BLUE en mode prévision.
L’étude présentée ici a fait l’objet du stage de Master 2 d’Elizabeth Harader. Cette
section 3 en présente les principaux résultats. Ces derniers sont encourageants et doivent être
complétés par quelques travaux supplémentaires.
3.1.2. Données utilisées
Cette étude a été réalisée sur un échantillon de 18 épisodes de crue pour lesquels les
pluies radar de Météo-France étaient disponibles. Ces données ont subi un traitement
HYDRAM qui consiste à corriger des effets de masque, estimer le profil vertical de
réflectivité et convertir les réflectivités en intensité de pluies via la relation Z-R (cf chapitre 4
section 2.1).
Nom épisode Début épisode Fin épisode MFB Re2 Rh
2 QHp
Décembre 97 16/12/1997 6h 27/12/1997 0h 1.74 0.13 0.28 122
Novembre 99 11/11/1999 6h 23/11/1999 0h 1.09 0.26 0.47 42.8
Septembre 00 28/09/2000 6h 03/10/2000 19h 1.79 0.91 0.93 51.5
Décembre 00 23/12/2000 6h 31/12/2000 23h 1.5 0.11 0.31 48.3
Janvier 01 16/01/2001 6h 24/01/2001 14h 1.53 0.01 0.68 93.1
Septembre 02 08/09/2002 6h 12/09/2002 10h 1.80 0.95 0.51 103
Octobre 02 08/10/2002 6h 14/10/2002 17h 1.74 0.31 0.72 43.0
Décembre 02 09/12/2002 6h 21/12/2002 1h 1.69 0.11 0.54 376
Septembre 03 22/09/2003 6h 25/09/2003 15h 1.27 0.87 0.87 91.5
Novembre 03(1) 15/11/2003 6h 20/11/2003 4h 1.58 0.48 0.52 64.1
Novembre 03(2) 21/11/2003 6h 29/11/2003 2h 1.58 0.31 0.85 94.8
Décembre 03 29/11/2003 6h 10/12/2003 21h 1.05 0.10 0.64 424
Septembre 05 05/09/2005 6h 11/09/2005 6h 1.29 0.80 0.69 467
Janvier 06 27/01/2006 6h 07/02/2006 17h 1.24 0.00 0.45 52.5
Septembre 06(2) 23/09/2006 6h 30/09/2006 9h 1.43 0.79 0.90 22.8
Mai 07 01/05/2007 6h 18/05/2007 10h 1.01 0.25 0.15 8.78
Octobre 08 19/10/2008 6h 25/10/2008 6h 1.07 0.76 0.80 109
Novembre 08 01/11/2008 6h 12/11/2008 06h 0.87 0.79 0.76 30.8
Tableau 29 : Caractéristiques des épisodes utilisés pour la correction des pluies en entrée du
modèle par assimilation de données. MFB est le Mean Field Bias ; Re2 est le coefficient de
détermination calculé entre les cumuls de pluie au sol et les cumuls de pluie radar ; Rh2 est la
moyenne des coefficients de détermination calculés entre les chroniques de pluies horaires sol
et radar ; QHp est le débit de pointe horaire de l’épisode.
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 185 -
Les MFB calculés au chapitre 4 permettent d’estimer l’erreur systématique existant
entre les cumuls de pluies radar et ceux de pluies au sol. Pour l’ensemble des épisodes du
bassin du Lez (excepté novembre 2008), le MFB est supérieur à 1 ce qui signifie que le radar
sous-estime systématiquement les pluies par rapport aux pluies sol. La sous-estimation est en
moyenne de 40 %.
Les coefficients de détermination Re2 et Rh
2 calculés respectivement pour les cumuls
de pluie sur l’épisode et les chroniques horaires entre les pluies au sol et les pluies radar
indiquent la qualité de la pluie radar (cf. chapitre 4 section 2.2). Dans cet échantillon, il y a à
la fois des épisodes de début d’automne pour lesquels les pluies radar sont de bonne qualité
(Re2 et Rh
2 proches de 1) et des épisodes de fin d’automne ou d’hiver pour lesquels les pluies
radar sont de qualité moindre (Re2 et Rh
2 proches de 0).
Cet échantillon présente une large gamme de débits de pointe avec des épisodes de
crue très faibles (septembre 2006, mai 2007 ou novembre 2008 avec QHp < 30 m3/s) ou très
forts présentant des périodes de retour supérieures à 5 ans avec un débit de pointe horaire
QHp > 200 m3/s (octobre 2001, décembre 2002, décembre 2003 et septembre 2005).
3.2. Application de la technique d’assimilation de données
3.2.1. Principe de la correction des pluies par le BLUE
Pour chaque épisode de crue, les pluies radar brutes d’HYDRAM (autrement dit non
corrigées par le MFB) sont corrigées de façon uniforme et constante en utilisant les débits
mesurés à l’exutoire du bassin. Pour ce faire, le BLUE estime un coefficient multiplicateur
qu’on applique aux valeurs d’intensité de tous les pixels de chaque image radar, pour tous les
pas de temps. Pour un pixel i donné, on a donc une intensité de pluie corrigée Rcor,i de :
ii RRcor ., (Eq. 87)
où Rcor,i est l’intensité de pluie radar corrigé pour le pixel i, est le coefficient
multiplicateur estimé par le BLUE, Ri est l’intensité de pluie radar non corrigée pour le pixel
i.
Pour le BLUE, le vecteur de contrôle x contiendra donc le coefficient de correction
des pluies . Sa valeur a priori, stockée dans le vecteur d’ébauche xb = [b
], est fixée à 1 (pas
de correction des pluies au départ). L’écart-type de l’erreur commise sur b a été fixé à 0.4
soit 40% de b. Ce pourcentage correspond à l’erreur systématique moyenne existant entre les
pluies au sol et les pluies radar HYDRAM (cf. section 3.1.2). Il est stocké dans la matrice B.
Les observations utilisées, stockées dans le vecteur yo, correspondent aux débits
observés depuis le début d’un épisode à l’exutoire du bassin. Les erreurs sur les débits
observés sont supposées décorrélées. Du fait de l’extrapolation de la courbe de tarage, l’erreur
de mesure sur les débits forts (> 300 m3/s) est supposée importante. Le modèle est moins
fiable (et donc l’erreur de représentativité importante) sur les faibles débits (< 15 m3/s).
L’erreur d’observation est donc importante pour les débits forts (> 300 m3/s) et faibles (< 15
m3/s).
L’assimilation se fera alors pour des débits compris entre 15 m3/s et 300 m
3/s (lorsque
cela est possible). Lors des crues à pointes multiples, on procèdera à une assimilation séparée.
Pour les 4 crues aux débits inférieurs ou proches de 40 m3/s, les débits seront assimilés au-
dessus de 2 m3/s (et non 15 m
3/s). Pour les débits assimilables (entre 15 et 300 m
3/s pour les
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 186 -
crues supérieures à 40 m3/s ou > 2 m
3/s pour les crues inférieures à 40 m
3/s), l’écart-type de
l’erreur d’observation R (stocké dans la matrice R) est pris inversement proportionnel à la
valeur Q du débit assimilé. Autrement dit,
QR
Eq. 88)
où est fixé à 0.25. Avec ce type de correction, on fait davantage confiance aux débits forts
qu’aux débits faibles. En effet, pour un débit de 300 m3/s l’écart-type de l’erreur
d’observation est de 0.001 m3/s et pour un débit de 15 m
3/s, l’écart-type est de 0.017 m
3/s.
Quelle que soit la valeur du débit, l’erreur d’observation est très faible, le but étant d’accorder
une confiance importante aux observations de débit et une confiance très faible aux pluies
radar. L’idée est la même que pour la correction par le MFB, qui considère les pluies au sol
comme pluie de référence avec une confiance absolue.
Le BLUE ainsi calibré a été utilisé en mode « réanalyse » c’est-à-dire en assimilant
l’ensemble des débits assimilables de l’épisode puis en mode « prévision » c’est-à-dire en
assimilant uniquement les débits assimilables jusqu’à 3 h avant le pic de crue.
3.2.2. Application en mode réanalyse
L’objectif est d’abord de voir s’il existe un lien entre le coefficient de correction
estimé par le BLUE à partir des débits observés à l’exutoire du bassin et le MFB estimé à
partir des cumuls de pluie des pluviomètres au sol. Le BLUE est donc dans un premier temps
utilisé en mode réanalyse. Dans cette situation, l’ensemble des débits assimilables (situés
entre 15 et 300 m3/s pour les crues supérieures à 40 m
3/s ou au-dessus de 2 m
3/s pour les crues
inférieures à 40 m3/s) sont utilisés pour estimer le coefficient . Le modèle hydrologique,
représentant l’opérateur d’observation, fonctionne avec les valeurs calibrées des paramètres à
savoir w = 101 mm, ds = 0.28 j-1
, V = 1.3 m/s et K0 = 0.3. La valeur calibrée de S est celle
obtenue avec les meilleures pluies disponibles. Il s’agit donc du S calibré avec les pluies radar
(corrigées par le MFB) pour les épisodes de septembre 2000, septembre 2003, septembre
2005, septembre 2006(2), octobre 2008 et novembre 2008 et du S calibré avec les pluies au
sol pour le reste. Ainsi, on évite au maximum qu’une partie de l’erreur liée à l’estimation de
la pluie soit contenue dans la valeur calibrée de S.
Les valeurs de MFB et de sont alors comparées à travers une régression linéaire.
Lors de crues à pointes multiples, les performances du modèle pouvant être limitées pour les
deuxième ou troisième pics de crue, seul le utilisé pour corriger le premier pic sera retenu.
La comparaison entre le MFB et le coefficient porte aussi sur les simulations de débit à
l’exutoire après correction. Afin d’évaluer l’efficacité de chacune des deux corrections, le
critère de Nash sera calculé sur l’ensemble de l’épisode pour les crues simples ou sur le pic de
crue sur lequel porte la correction pour les crues à pointes multiples. Un exemple
d’application sur l’épisode de décembre 1997 permet d’illustrer l’efficacité de la correction de
par le BLUE en mode réanalyse (figure 78).
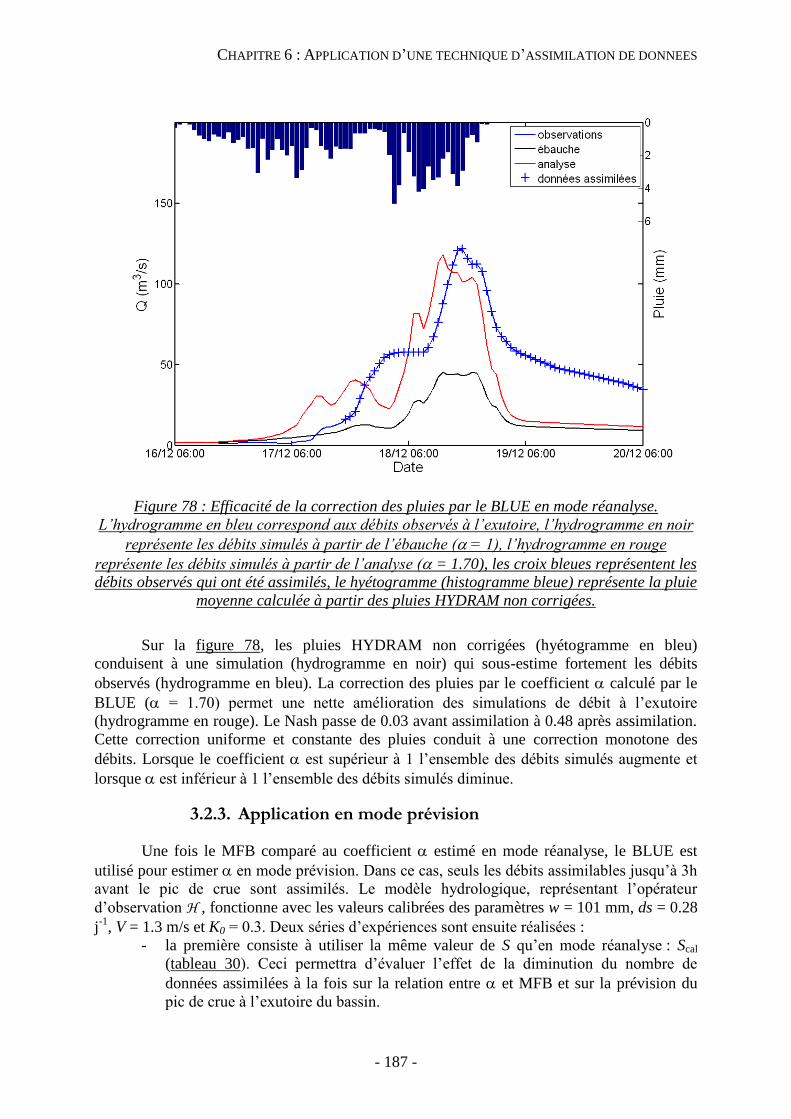
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 187 -
Figure 78 : Efficacité de la correction des pluies par le BLUE en mode réanalyse.
L’hydrogramme en bleu correspond aux débits observés à l’exutoire, l’hydrogramme en noir
représente les débits simulés à partir de l’ébauche ( = 1), l’hydrogramme en rouge
représente les débits simulés à partir de l’analyse ( = 1.70), les croix bleues représentent les
débits observés qui ont été assimilés, le hyétogramme (histogramme bleue) représente la pluie
moyenne calculée à partir des pluies HYDRAM non corrigées.
Sur la figure 78, les pluies HYDRAM non corrigées (hyétogramme en bleu)
conduisent à une simulation (hydrogramme en noir) qui sous-estime fortement les débits
observés (hydrogramme en bleu). La correction des pluies par le coefficient calculé par le
BLUE ( = 1.70) permet une nette amélioration des simulations de débit à l’exutoire
(hydrogramme en rouge). Le Nash passe de 0.03 avant assimilation à 0.48 après assimilation.
Cette correction uniforme et constante des pluies conduit à une correction monotone des
débits. Lorsque le coefficient est supérieur à 1 l’ensemble des débits simulés augmente et
lorsque est inférieur à 1 l’ensemble des débits simulés diminue.
3.2.3. Application en mode prévision
Une fois le MFB comparé au coefficient estimé en mode réanalyse, le BLUE est
utilisé pour estimer en mode prévision. Dans ce cas, seuls les débits assimilables jusqu’à 3h
avant le pic de crue sont assimilés. Le modèle hydrologique, représentant l’opérateur
d’observation H , fonctionne avec les valeurs calibrées des paramètres w = 101 mm, ds = 0.28
j-1
, V = 1.3 m/s et K0 = 0.3. Deux séries d’expériences sont ensuite réalisées :
- la première consiste à utiliser la même valeur de S qu’en mode réanalyse : Scal
(tableau 30). Ceci permettra d’évaluer l’effet de la diminution du nombre de
données assimilées à la fois sur la relation entre et MFB et sur la prévision du
pic de crue à l’exutoire du bassin.

CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 188 -
- la deuxième consiste à utiliser la valeur de Sreg prévue par une régression linéaire
entre le S calibré et un indicateur de l’état hydrique de l’hydrosystème : l’indice
d’humidité Hu2 pris en début d’événement Hu2ini (tableau 30). Elle permettra de
voir quel effet l’initialisation par un indicateur externe a à la fois sur la relation
entre et MFB et sur la prévision du pic de crue à l’exutoire du bassin.
Nom
épisode
Scal
(mm)
Hu2ini
(%)
Sreg
(mm)
Déc 97 208 62 184
Nov 99 204 61 196
Sept 00 267 58 220
Déc 00 150 61 197
Jan 01 116 71 107
Sept 02 304 59 211
Oct 02 321 64 165
Déc 02 146 69 119
Sept 03 254 52 273
Nov 03(1) 229 69 119
Nov 03(2) 126 74 74
Déc 03 143 76 64
Sept 05 246 49 302
Jan 06 202 67 139
Sept 06(2) 313 62 188
Mai 07 323 58 216
Oct 08 392 48 304
Nov 08 151 63 179
Tableau 30 : Valeurs prises par le paramètre S après calibration (Scal) et après initialisation
(Sreg) avec la régression linéaire avec l’indicateur d’humidité Hu2 pris en début d’épisode
(Hu2ini).
Afin d’évaluer l’efficacité du BLUE pour la prévision du pic de crue à l’exutoire du
bassin, deux critères sont utilisés. L’écart relatif au débit de pointe ERDP et le décalage
temporel entre les débits de pointe simulé et observé Etp, Un exemple d’application sur
l’épisode de décembre 1997 permet d’illustrer l’efficacité de la correction de par le BLUE
en mode prévision.
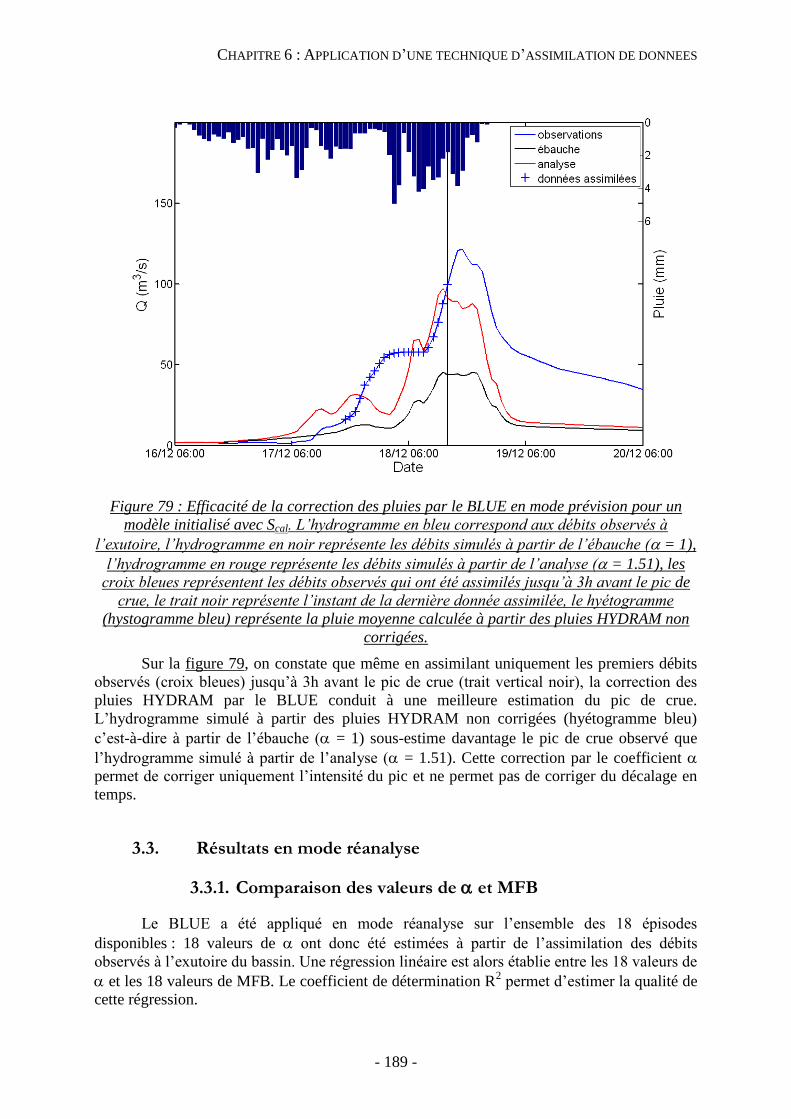
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 189 -
Figure 79 : Efficacité de la correction des pluies par le BLUE en mode prévision pour un
modèle initialisé avec Scal. L’hydrogramme en bleu correspond aux débits observés à
l’exutoire, l’hydrogramme en noir représente les débits simulés à partir de l’ébauche ( = 1),
l’hydrogramme en rouge représente les débits simulés à partir de l’analyse ( = 1.51), les
croix bleues représentent les débits observés qui ont été assimilés jusqu’à 3h avant le pic de
crue, le trait noir représente l’instant de la dernière donnée assimilée, le hyétogramme
(hystogramme bleu) représente la pluie moyenne calculée à partir des pluies HYDRAM non
corrigées.
Sur la figure 79, on constate que même en assimilant uniquement les premiers débits
observés (croix bleues) jusqu’à 3h avant le pic de crue (trait vertical noir), la correction des
pluies HYDRAM par le BLUE conduit à une meilleure estimation du pic de crue.
L’hydrogramme simulé à partir des pluies HYDRAM non corrigées (hyétogramme bleu)
c’est-à-dire à partir de l’ébauche ( = 1) sous-estime davantage le pic de crue observé que
l’hydrogramme simulé à partir de l’analyse ( = 1.51). Cette correction par le coefficient
permet de corriger uniquement l’intensité du pic et ne permet pas de corriger du décalage en
temps.
3.3. Résultats en mode réanalyse
3.3.1. Comparaison des valeurs de et MFB
Le BLUE a été appliqué en mode réanalyse sur l’ensemble des 18 épisodes
disponibles : 18 valeurs de ont donc été estimées à partir de l’assimilation des débits
observés à l’exutoire du bassin. Une régression linéaire est alors établie entre les 18 valeurs de
et les 18 valeurs de MFB. Le coefficient de détermination R2 permet d’estimer la qualité de
cette régression.
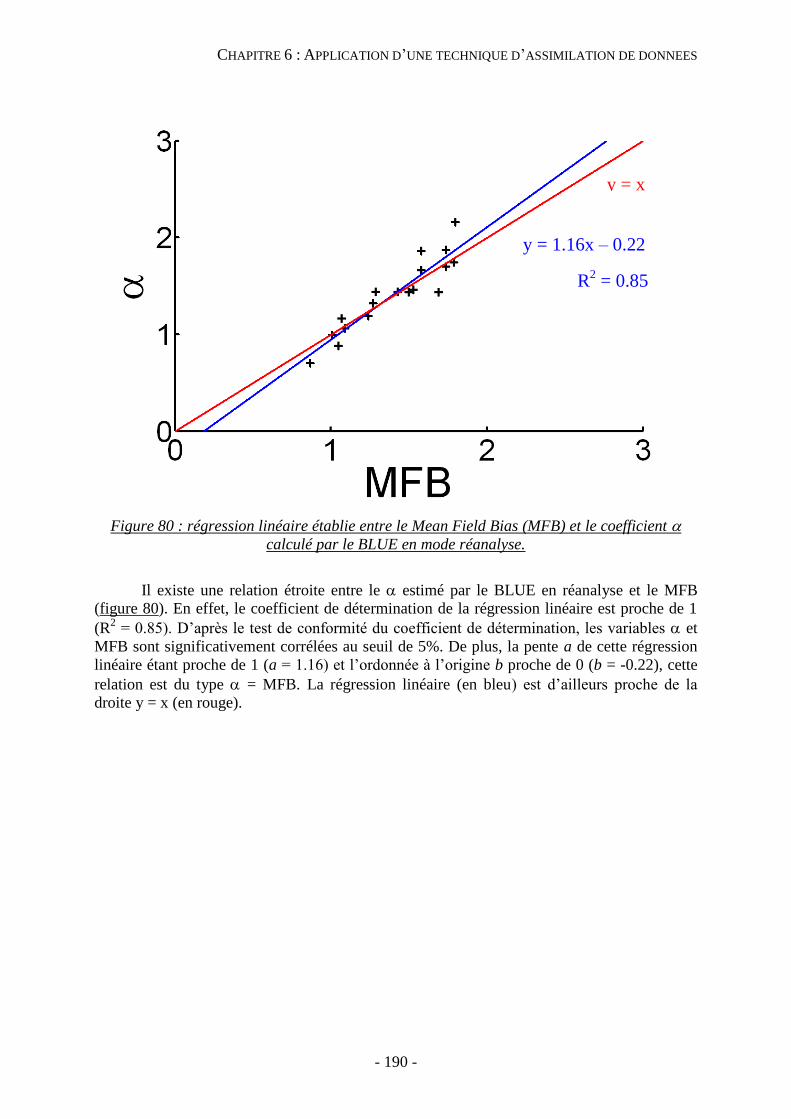
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 190 -
Figure 80 : régression linéaire établie entre le Mean Field Bias (MFB) et le coefficient
calculé par le BLUE en mode réanalyse.
Il existe une relation étroite entre le estimé par le BLUE en réanalyse et le MFB
(figure 80). En effet, le coefficient de détermination de la régression linéaire est proche de 1
(R2 = 0.85). D’après le test de conformité du coefficient de détermination, les variables et
MFB sont significativement corrélées au seuil de 5%. De plus, la pente a de cette régression
linéaire étant proche de 1 (a = 1.16) et l’ordonnée à l’origine b proche de 0 (b = -0.22), cette
relation est du type = MFB. La régression linéaire (en bleu) est d’ailleurs proche de la
droite y = x (en rouge).
y = 1.16x – 0.22
R2 = 0.85
y = x
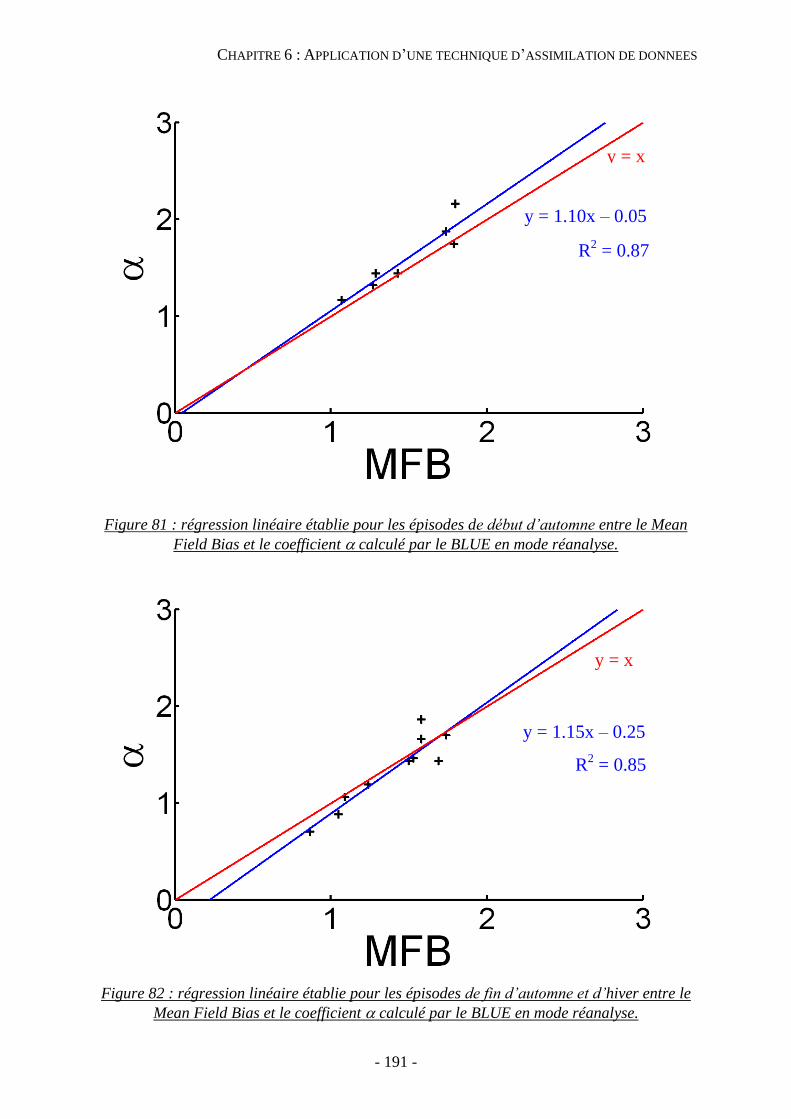
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 191 -
Figure 81 : régression linéaire établie pour les épisodes de début d’automne entre le Mean
Field Bias et le coefficient calculé par le BLUE en mode réanalyse.
Figure 82 : régression linéaire établie pour les épisodes de fin d’automne et d’hiver entre le
Mean Field Bias et le coefficient calculé par le BLUE en mode réanalyse.
y = 1.10x – 0.05
R2 = 0.87
y = x
y = 1.15x – 0.25
R2 = 0.85
y = x
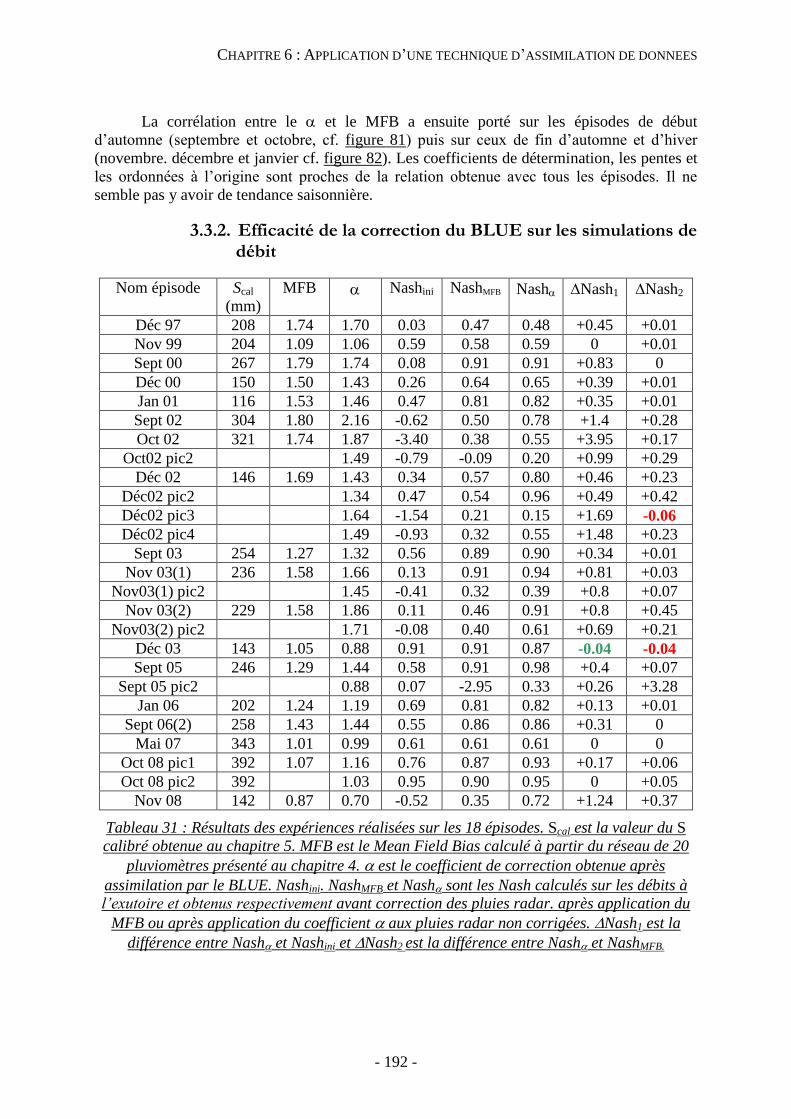
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 192 -
La corrélation entre le et le MFB a ensuite porté sur les épisodes de début
d’automne (septembre et octobre, cf. figure 81) puis sur ceux de fin d’automne et d’hiver
(novembre. décembre et janvier cf. figure 82). Les coefficients de détermination, les pentes et
les ordonnées à l’origine sont proches de la relation obtenue avec tous les épisodes. Il ne
semble pas y avoir de tendance saisonnière.
3.3.2. Efficacité de la correction du BLUE sur les simulations de débit
Nom épisode Scal
(mm)
MFB Nashini NashMFB Nash Nash1 Nash2
Déc 97 208 1.74 1.70 0.03 0.47 0.48 +0.45 +0.01
Nov 99 204 1.09 1.06 0.59 0.58 0.59 0 +0.01
Sept 00 267 1.79 1.74 0.08 0.91 0.91 +0.83 0
Déc 00 150 1.50 1.43 0.26 0.64 0.65 +0.39 +0.01
Jan 01 116 1.53 1.46 0.47 0.81 0.82 +0.35 +0.01
Sept 02 304 1.80 2.16 -0.62 0.50 0.78 +1.4 +0.28
Oct 02 321 1.74 1.87 -3.40 0.38 0.55 +3.95 +0.17
Oct02 pic2 1.49 -0.79 -0.09 0.20 +0.99 +0.29
Déc 02 146 1.69 1.43 0.34 0.57 0.80 +0.46 +0.23
Déc02 pic2 1.34 0.47 0.54 0.96 +0.49 +0.42
Déc02 pic3 1.64 -1.54 0.21 0.15 +1.69 -0.06
Déc02 pic4 1.49 -0.93 0.32 0.55 +1.48 +0.23
Sept 03 254 1.27 1.32 0.56 0.89 0.90 +0.34 +0.01
Nov 03(1) 236 1.58 1.66 0.13 0.91 0.94 +0.81 +0.03
Nov03(1) pic2 1.45 -0.41 0.32 0.39 +0.8 +0.07
Nov 03(2) 229 1.58 1.86 0.11 0.46 0.91 +0.8 +0.45
Nov03(2) pic2 1.71 -0.08 0.40 0.61 +0.69 +0.21
Déc 03 143 1.05 0.88 0.91 0.91 0.87 -0.04 -0.04
Sept 05 246 1.29 1.44 0.58 0.91 0.98 +0.4 +0.07
Sept 05 pic2 0.88 0.07 -2.95 0.33 +0.26 +3.28
Jan 06 202 1.24 1.19 0.69 0.81 0.82 +0.13 +0.01
Sept 06(2) 258 1.43 1.44 0.55 0.86 0.86 +0.31 0
Mai 07 343 1.01 0.99 0.61 0.61 0.61 0 0
Oct 08 pic1 392 1.07 1.16 0.76 0.87 0.93 +0.17 +0.06
Oct 08 pic2 392 1.03 0.95 0.90 0.95 0 +0.05
Nov 08 142 0.87 0.70 -0.52 0.35 0.72 +1.24 +0.37
Tableau 31 : Résultats des expériences réalisées sur les 18 épisodes. Scal est la valeur du S
calibré obtenue au chapitre 5. MFB est le Mean Field Bias calculé à partir du réseau de 20
pluviomètres présenté au chapitre 4. est le coefficient de correction obtenue après
assimilation par le BLUE. Nashini. NashMFB et Nash sont les Nash calculés sur les débits à
l’exutoire et obtenus respectivement avant correction des pluies radar. après application du
MFB ou après application du coefficient aux pluies radar non corrigées. Nash1 est la
différence entre Nash et Nashini et Nash2 est la différence entre Nash et NashMFB.

CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 193 -
Afin d’évaluer l’efficacité de la correction des pluies par le BLUE sur la simulation
des débits à l’exutoire du bassin, le Nash1 a été calculé. Il fait la différence entre le Nash
après et avant correction des pluies par le coefficient :
iniα1 NashNashNash (Eq. 89)
Si Nash1 > 0, on a une amélioration de la simulation après correction par le coefficient .
Si Nash1 < 0, on a une détérioration de la simulation après correction par le coefficient .
De manière générale, les simulations de débits avec les pluies radar brutes sont
médiocres, avec, sur l’ensemble des 26 pics, un Nashini moyen de -0.04 et un Nashini médian
de 0.13. Après assimilation, les simulations de débits sont nettement meilleures avec un
Nash moyen de 0.69 et un Nash médian de 0.78. Cette amélioration concerne 22 des 26 pics
de crue (pour lesquels Nash1 > 0). Pour ces 22 pics, le Nash est en moyenne amélioré de
+0.84 mais cette amélioration est très variable selon les épisodes puisque l’écart-type est de
0.80. Pour 3 pics (novembre 1999, mai 2007 et octobre 2008 pic2) l’assimilation de données
n’apporte aucun changement (Nash1 = 0). Pour décembre 2003, la détérioration est très
légère (Nash1 = -0.04). Pour cette crue, les débits dépassent les 300 m3/s, valeur au-dessus
de laquelle les mesures de débits sont très incertaines et ne sont pas assimilées. Or, le Nash est
calculé sur l’ensemble de l’épisode et prend en compte ces débits incertains. Si les débits
supérieurs à 300 m3/s sont assimilés, la détérioration disparaît : après assimilation, le Nash
est de 0.91 comme avant assimilation (Nashini = 0.91).
Cette correction par application du coefficient a ensuite été comparée à celle
obtenue par application du MFB. Pour cela, le Nash2 a été calculé. Il fait la différence entre
le Nash obtenu après application du coefficient et le Nash obtenu après application du
MFB :
MFBα2 NashNashNash (Eq. 90)
Si Nash2 > 0, la correction apportée par est meilleure que celle apportée par le MFB.
Si Nash2 < 0, la correction apportée par est moins bonne que celle apportée par le MFB.
De manière générale, les simulations obtenues après correction par sont légèrement
meilleures qu’avec le MFB. En effet, le Nash moyen est de 0.69 et le Nash médian de 0.78
alors que le NashMFB moyen est de 0.47 et le NashMFB moyen de 0.58. Cette amélioration
concerne 21 des 26 pics testés (Nash2 > 0). Elle peut être due au fait que la correction par
repose sur les débits plutôt que sur les pluies. Ces derniers intègrent la dynamique de
l’ensemble du bassin versant et permettent peut-être une correction des pluies brutes plus
adaptée au bassin du Lez que le MFB. L’estimation du MFB repose en effet sur un réseau de
20 pluviomètres couvrant une zone d’environ 3000 km2 conduisant peut-être à une correction
plus globale que celle apportée par le coefficient obtenu par le BLUE. On constate
également que l’amélioration apportée par par rapport au MFB est faible pour les crues
simples (0 < Nash2 < 0.10) et forte pour les crues à pointes multiples (Nash2 > 0.10 le plus
souvent). Ceci s’expliquerait par le fait que le MFB, calculé à partir des cumuls de pluie sur
l’épisode, apporte une correction globale sur l’ensemble de l’épisode. Lors des crues à pointes
multiples, cette correction n’est donc pas forcément optimale pour un pic donné. Ceci n’est
pas le cas du qui n’est estimé qu’à partir des données de débit du pic qu’on cherche à
simuler. Pour 3 pics (septembre 2000, septembre 2006(2) et mai 2007), les corrections par
ou MFB donnent des résultats équivalents (Nash2 = 0). Enfin pour 2 pics (pic 3 de décembre
2002 et pic de décembre 2003), la correction par le MFB est meilleure que celle apportée par
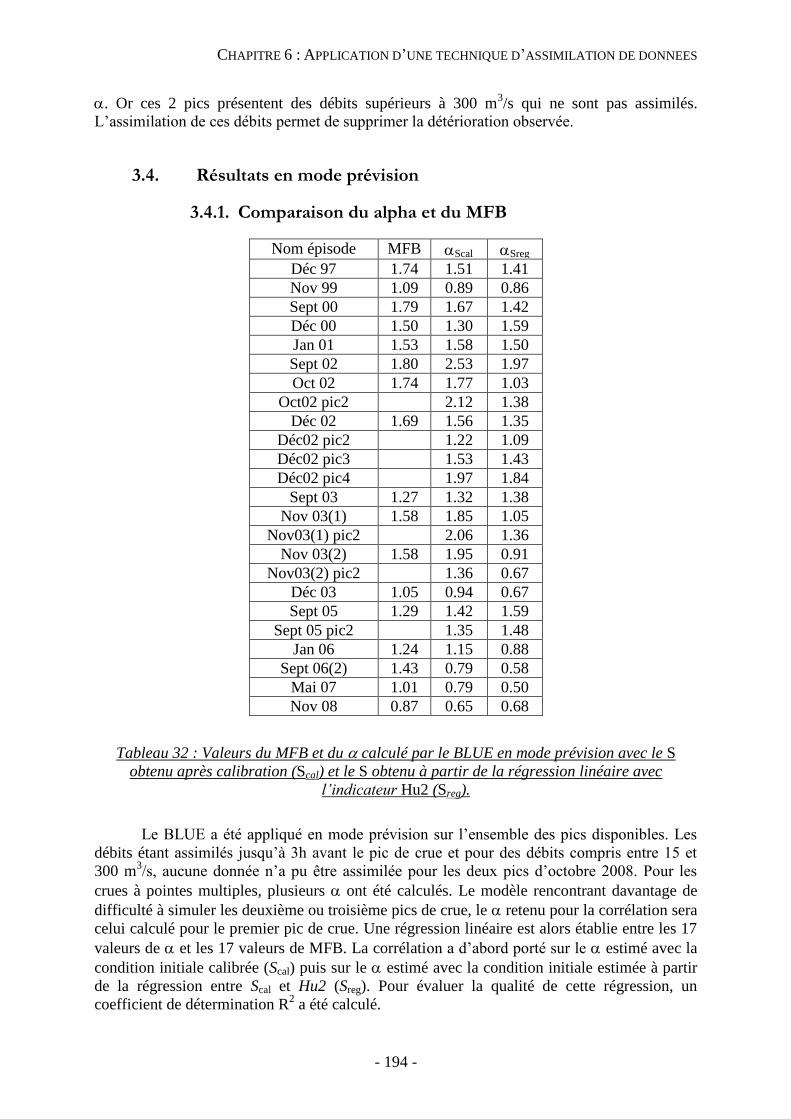
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 194 -
. Or ces 2 pics présentent des débits supérieurs à 300 m3/s qui ne sont pas assimilés.
L’assimilation de ces débits permet de supprimer la détérioration observée.
3.4. Résultats en mode prévision
3.4.1. Comparaison du alpha et du MFB
Nom épisode MFB Scal Sreg
Déc 97 1.74 1.51 1.41
Nov 99 1.09 0.89 0.86
Sept 00 1.79 1.67 1.42
Déc 00 1.50 1.30 1.59
Jan 01 1.53 1.58 1.50
Sept 02 1.80 2.53 1.97
Oct 02 1.74 1.77 1.03
Oct02 pic2 2.12 1.38
Déc 02 1.69 1.56 1.35
Déc02 pic2 1.22 1.09
Déc02 pic3 1.53 1.43
Déc02 pic4 1.97 1.84
Sept 03 1.27 1.32 1.38
Nov 03(1) 1.58 1.85 1.05
Nov03(1) pic2 2.06 1.36
Nov 03(2) 1.58 1.95 0.91
Nov03(2) pic2 1.36 0.67
Déc 03 1.05 0.94 0.67
Sept 05 1.29 1.42 1.59
Sept 05 pic2 1.35 1.48
Jan 06 1.24 1.15 0.88
Sept 06(2) 1.43 0.79 0.58
Mai 07 1.01 0.79 0.50
Nov 08 0.87 0.65 0.68
Tableau 32 : Valeurs du MFB et du calculé par le BLUE en mode prévision avec le S
obtenu après calibration (Scal) et le S obtenu à partir de la régression linéaire avec
l’indicateur Hu2 (Sreg).
Le BLUE a été appliqué en mode prévision sur l’ensemble des pics disponibles. Les
débits étant assimilés jusqu’à 3h avant le pic de crue et pour des débits compris entre 15 et
300 m3/s, aucune donnée n’a pu être assimilée pour les deux pics d’octobre 2008. Pour les
crues à pointes multiples, plusieurs ont été calculés. Le modèle rencontrant davantage de
difficulté à simuler les deuxième ou troisième pics de crue, le retenu pour la corrélation sera
celui calculé pour le premier pic de crue. Une régression linéaire est alors établie entre les 17
valeurs de et les 17 valeurs de MFB. La corrélation a d’abord porté sur le estimé avec la
condition initiale calibrée (Scal) puis sur le estimé avec la condition initiale estimée à partir
de la régression entre Scal et Hu2 (Sreg). Pour évaluer la qualité de cette régression, un
coefficient de détermination R2 a été calculé.
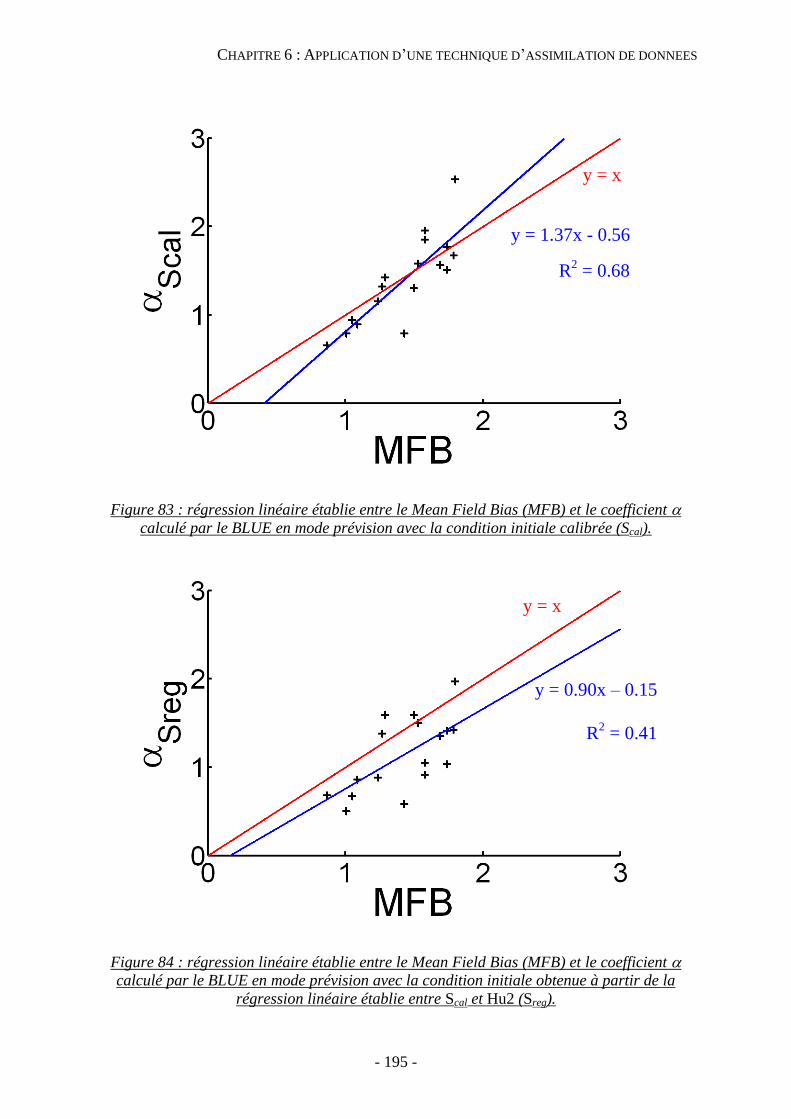
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 195 -
Figure 83 : régression linéaire établie entre le Mean Field Bias (MFB) et le coefficient
calculé par le BLUE en mode prévision avec la condition initiale calibrée (Scal).
Figure 84 : régression linéaire établie entre le Mean Field Bias (MFB) et le coefficient
calculé par le BLUE en mode prévision avec la condition initiale obtenue à partir de la
régression linéaire établie entre Scal et Hu2 (Sreg).
y = 1.37x - 0.56
y = x
R2 = 0.68
y = x
y = 0.90x – 0.15
R2 = 0.41

CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 196 -
La régression linéaire entre le calculé par le BLUE et le MFB est de moins bonne
qualité en mode prévision qu’en mode réanalyse. En effet, en mode prévision le coefficient de
détermination est de R2 = 0.85 alors qu’il est de R
2 = 0.68 ou R
2 = 0.41 en mode prévision.
Cette détérioration en mode prévision vient d’abord du fait qu’on assimile moins de données
qu’en mode réanalyse. On s’aperçoit qu’en gardant la même valeur de la condition initiale
(Scal), le coefficient de détermination passe de R2 = 0.85 lorsqu’on assimile l’ensemble des
débits du pic de crue à R2 = 0.68 lorsqu’on assimile uniquement les débits de montée de crue
jusqu’à 3h avant le pic. Cette détérioration s’accentue lorsqu’on utilise la valeur Sreg obtenue à
partir de la régression linéaire avec Hu2. On passe alors d’un R2 de 0.68 à un R
2 de 0.40.
Cette détérioration peut s’expliquer par le fait que le estimé par le BLUE corrige l’erreur
sur l’estimation des pluies (comme pour Scal) mais compense aussi l’erreur sur l’estimation de
la condition initiale obtenue avec l’indicateur Hu2.
La détérioration de la qualité de la régression entre et MFB est due d’une part à la
réduction du nombre de débits assimilés et d’autre part à l’initialisation du modèle avec un
indicateur tel que Hu2.
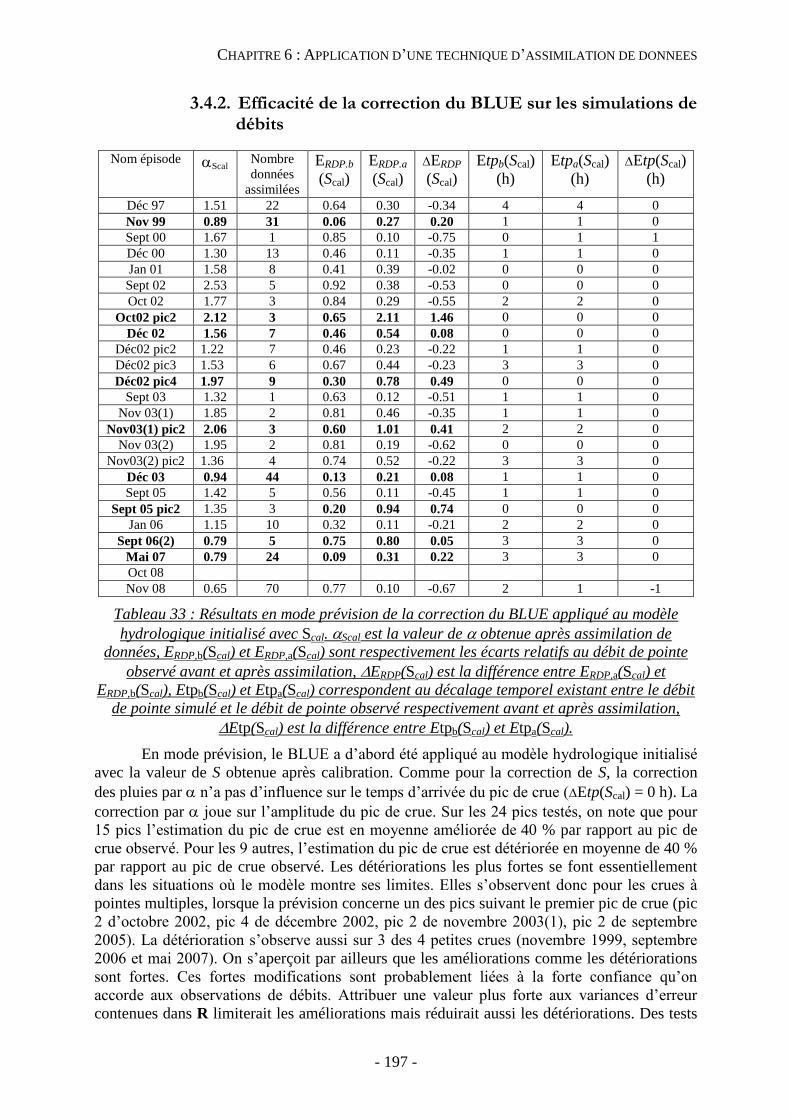
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 197 -
3.4.2. Efficacité de la correction du BLUE sur les simulations de débits
Nom épisode Scal Nombre
données
assimilées
ERDP.b
(Scal)
ERDP.a
(Scal)
ERDP
(Scal)
Etpb(Scal)
(h)
Etpa(Scal)
(h)
Etp(Scal)
(h)
Déc 97 1.51 22 0.64 0.30 -0.34 4 4 0
Nov 99 0.89 31 0.06 0.27 0.20 1 1 0
Sept 00 1.67 1 0.85 0.10 -0.75 0 1 1
Déc 00 1.30 13 0.46 0.11 -0.35 1 1 0
Jan 01 1.58 8 0.41 0.39 -0.02 0 0 0
Sept 02 2.53 5 0.92 0.38 -0.53 0 0 0
Oct 02 1.77 3 0.84 0.29 -0.55 2 2 0
Oct02 pic2 2.12 3 0.65 2.11 1.46 0 0 0
Déc 02 1.56 7 0.46 0.54 0.08 0 0 0
Déc02 pic2 1.22 7 0.46 0.23 -0.22 1 1 0
Déc02 pic3 1.53 6 0.67 0.44 -0.23 3 3 0
Déc02 pic4 1.97 9 0.30 0.78 0.49 0 0 0
Sept 03 1.32 1 0.63 0.12 -0.51 1 1 0
Nov 03(1) 1.85 2 0.81 0.46 -0.35 1 1 0
Nov03(1) pic2 2.06 3 0.60 1.01 0.41 2 2 0
Nov 03(2) 1.95 2 0.81 0.19 -0.62 0 0 0
Nov03(2) pic2 1.36 4 0.74 0.52 -0.22 3 3 0
Déc 03 0.94 44 0.13 0.21 0.08 1 1 0
Sept 05 1.42 5 0.56 0.11 -0.45 1 1 0
Sept 05 pic2 1.35 3 0.20 0.94 0.74 0 0 0
Jan 06 1.15 10 0.32 0.11 -0.21 2 2 0
Sept 06(2) 0.79 5 0.75 0.80 0.05 3 3 0
Mai 07 0.79 24 0.09 0.31 0.22 3 3 0
Oct 08
Nov 08 0.65 70 0.77 0.10 -0.67 2 1 -1
Tableau 33 : Résultats en mode prévision de la correction du BLUE appliqué au modèle
hydrologique initialisé avec Scal. Scal est la valeur de obtenue après assimilation de
données, ERDP,b(Scal) et ERDP,a(Scal) sont respectivement les écarts relatifs au débit de pointe
observé avant et après assimilation, ERDP(Scal) est la différence entre ERDP,a(Scal) et
ERDP,b(Scal), Etpb(Scal) et Etpa(Scal) correspondent au décalage temporel existant entre le débit
de pointe simulé et le débit de pointe observé respectivement avant et après assimilation,
Etp(Scal) est la différence entre Etpb(Scal) et Etpa(Scal).
En mode prévision, le BLUE a d’abord été appliqué au modèle hydrologique initialisé
avec la valeur de S obtenue après calibration. Comme pour la correction de S, la correction
des pluies par n’a pas d’influence sur le temps d’arrivée du pic de crue (Etp(Scal) = 0 h). La
correction par joue sur l’amplitude du pic de crue. Sur les 24 pics testés, on note que pour
15 pics l’estimation du pic de crue est en moyenne améliorée de 40 % par rapport au pic de
crue observé. Pour les 9 autres, l’estimation du pic de crue est détériorée en moyenne de 40 %
par rapport au pic de crue observé. Les détériorations les plus fortes se font essentiellement
dans les situations où le modèle montre ses limites. Elles s’observent donc pour les crues à
pointes multiples, lorsque la prévision concerne un des pics suivant le premier pic de crue (pic
2 d’octobre 2002, pic 4 de décembre 2002, pic 2 de novembre 2003(1), pic 2 de septembre
2005). La détérioration s’observe aussi sur 3 des 4 petites crues (novembre 1999, septembre
2006 et mai 2007). On s’aperçoit par ailleurs que les améliorations comme les détériorations
sont fortes. Ces fortes modifications sont probablement liées à la forte confiance qu’on
accorde aux observations de débits. Attribuer une valeur plus forte aux variances d’erreur
contenues dans R limiterait les améliorations mais réduirait aussi les détériorations. Des tests
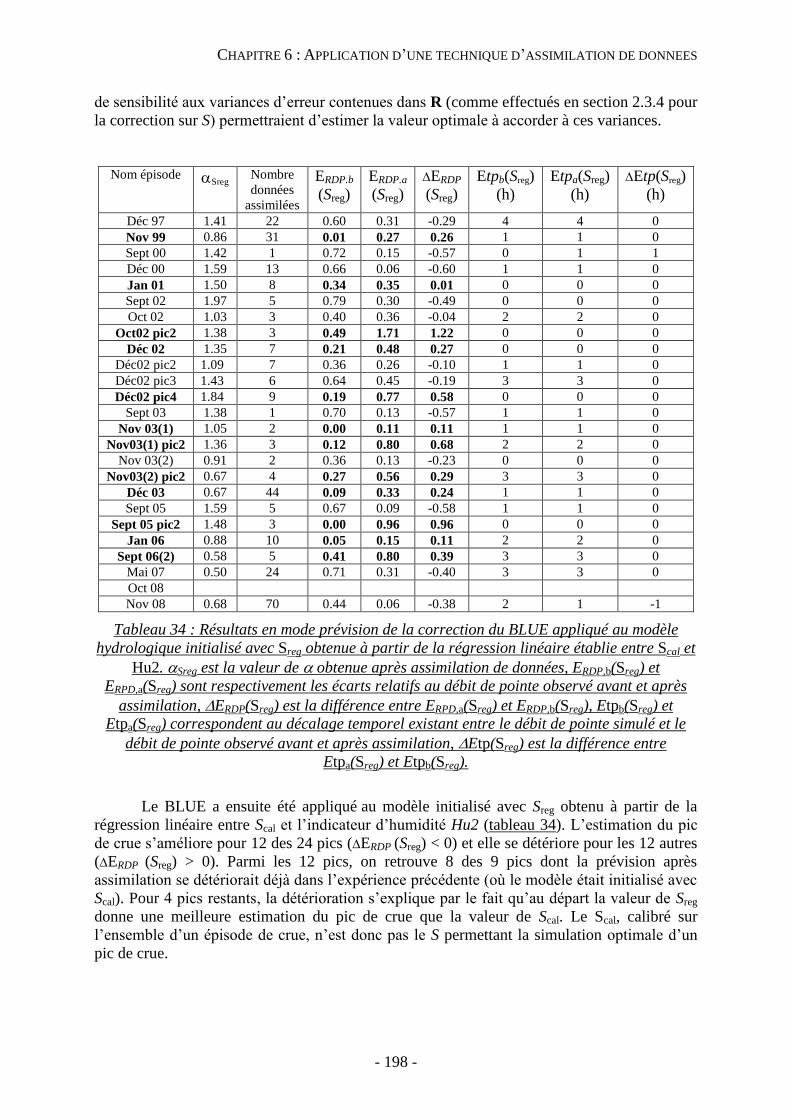
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 198 -
de sensibilité aux variances d’erreur contenues dans R (comme effectués en section 2.3.4 pour
la correction sur S) permettraient d’estimer la valeur optimale à accorder à ces variances.
Nom épisode Sreg Nombre
données
assimilées
ERDP.b
(Sreg)
ERDP.a
(Sreg)
ERDP
(Sreg)
Etpb(Sreg)
(h)
Etpa(Sreg)
(h)
Etp(Sreg)
(h)
Déc 97 1.41 22 0.60 0.31 -0.29 4 4 0
Nov 99 0.86 31 0.01 0.27 0.26 1 1 0
Sept 00 1.42 1 0.72 0.15 -0.57 0 1 1
Déc 00 1.59 13 0.66 0.06 -0.60 1 1 0
Jan 01 1.50 8 0.34 0.35 0.01 0 0 0
Sept 02 1.97 5 0.79 0.30 -0.49 0 0 0
Oct 02 1.03 3 0.40 0.36 -0.04 2 2 0
Oct02 pic2 1.38 3 0.49 1.71 1.22 0 0 0
Déc 02 1.35 7 0.21 0.48 0.27 0 0 0
Déc02 pic2 1.09 7 0.36 0.26 -0.10 1 1 0
Déc02 pic3 1.43 6 0.64 0.45 -0.19 3 3 0
Déc02 pic4 1.84 9 0.19 0.77 0.58 0 0 0
Sept 03 1.38 1 0.70 0.13 -0.57 1 1 0
Nov 03(1) 1.05 2 0.00 0.11 0.11 1 1 0
Nov03(1) pic2 1.36 3 0.12 0.80 0.68 2 2 0
Nov 03(2) 0.91 2 0.36 0.13 -0.23 0 0 0
Nov03(2) pic2 0.67 4 0.27 0.56 0.29 3 3 0
Déc 03 0.67 44 0.09 0.33 0.24 1 1 0
Sept 05 1.59 5 0.67 0.09 -0.58 1 1 0
Sept 05 pic2 1.48 3 0.00 0.96 0.96 0 0 0
Jan 06 0.88 10 0.05 0.15 0.11 2 2 0
Sept 06(2) 0.58 5 0.41 0.80 0.39 3 3 0
Mai 07 0.50 24 0.71 0.31 -0.40 3 3 0
Oct 08
Nov 08 0.68 70 0.44 0.06 -0.38 2 1 -1
Tableau 34 : Résultats en mode prévision de la correction du BLUE appliqué au modèle
hydrologique initialisé avec Sreg obtenue à partir de la régression linéaire établie entre Scal et
Hu2. Sreg est la valeur de obtenue après assimilation de données, ERDP,b(Sreg) et
ERPD,a(Sreg) sont respectivement les écarts relatifs au débit de pointe observé avant et après
assimilation, ERDP(Sreg) est la différence entre ERPD,a(Sreg) et ERDP,b(Sreg), Etpb(Sreg) et
Etpa(Sreg) correspondent au décalage temporel existant entre le débit de pointe simulé et le
débit de pointe observé avant et après assimilation, Etp(Sreg) est la différence entre
Etpa(Sreg) et Etpb(Sreg).
Le BLUE a ensuite été appliqué au modèle initialisé avec Sreg obtenu à partir de la
régression linéaire entre Scal et l’indicateur d’humidité Hu2 (tableau 34). L’estimation du pic
de crue s’améliore pour 12 des 24 pics (ERDP (Sreg) < 0) et elle se détériore pour les 12 autres
(ERDP (Sreg) > 0). Parmi les 12 pics, on retrouve 8 des 9 pics dont la prévision après
assimilation se détériorait déjà dans l’expérience précédente (où le modèle était initialisé avec
Scal). Pour 4 pics restants, la détérioration s’explique par le fait qu’au départ la valeur de Sreg
donne une meilleure estimation du pic de crue que la valeur de Scal. Le Scal, calibré sur
l’ensemble d’un épisode de crue, n’est donc pas le S permettant la simulation optimale d’un
pic de crue.
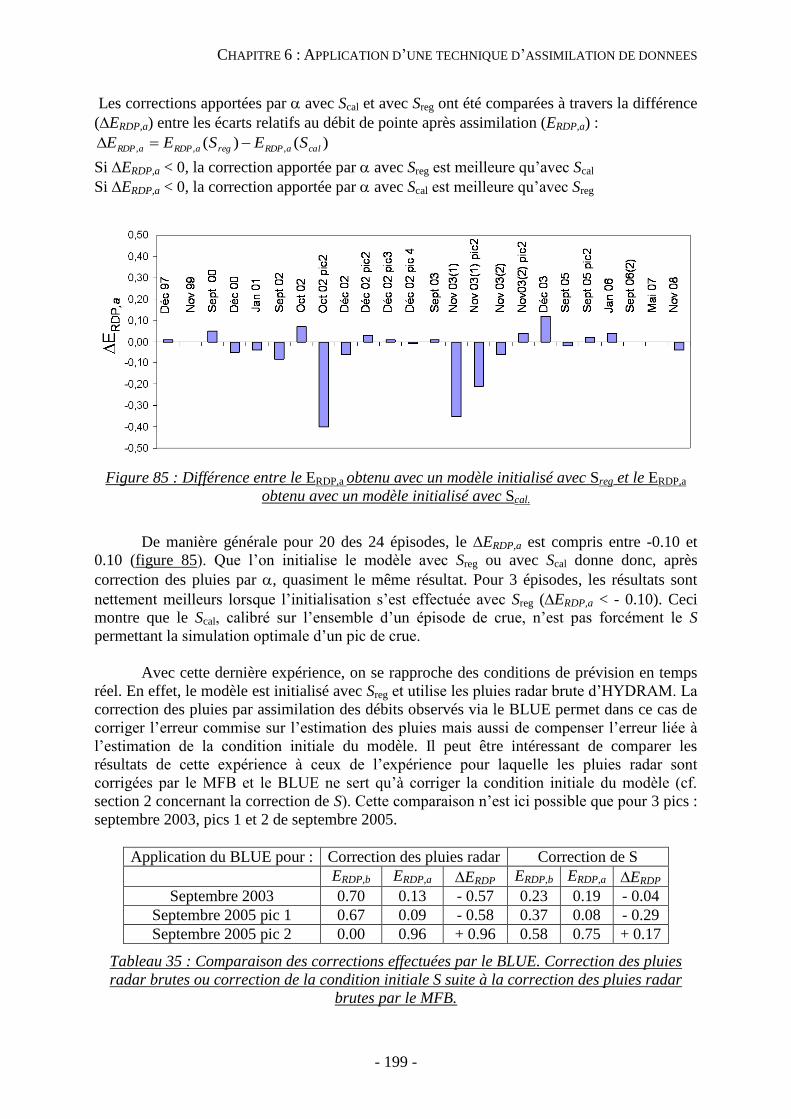
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 199 -
Les corrections apportées par avec Scal et avec Sreg ont été comparées à travers la différence
(ERDP,a) entre les écarts relatifs au débit de pointe après assimilation (ERDP,a) :
)()( ,,, calaRDPregaRDPaRDP SESEE
Si ERDP,a < 0, la correction apportée par avec Sreg est meilleure qu’avec Scal
Si ERDP,a < 0, la correction apportée par avec Scal est meilleure qu’avec Sreg
Figure 85 : Différence entre le ERDP,a obtenu avec un modèle initialisé avec Sreg et le ERDP,a
obtenu avec un modèle initialisé avec Scal.
De manière générale pour 20 des 24 épisodes, le ERDP,a est compris entre -0.10 et
0.10 (figure 85). Que l’on initialise le modèle avec Sreg ou avec Scal donne donc, après
correction des pluies par , quasiment le même résultat. Pour 3 épisodes, les résultats sont
nettement meilleurs lorsque l’initialisation s’est effectuée avec Sreg (ERDP,a < - 0.10). Ceci
montre que le Scal, calibré sur l’ensemble d’un épisode de crue, n’est pas forcément le S
permettant la simulation optimale d’un pic de crue.
Avec cette dernière expérience, on se rapproche des conditions de prévision en temps
réel. En effet, le modèle est initialisé avec Sreg et utilise les pluies radar brute d’HYDRAM. La
correction des pluies par assimilation des débits observés via le BLUE permet dans ce cas de
corriger l’erreur commise sur l’estimation des pluies mais aussi de compenser l’erreur liée à
l’estimation de la condition initiale du modèle. Il peut être intéressant de comparer les
résultats de cette expérience à ceux de l’expérience pour laquelle les pluies radar sont
corrigées par le MFB et le BLUE ne sert qu’à corriger la condition initiale du modèle (cf.
section 2 concernant la correction de S). Cette comparaison n’est ici possible que pour 3 pics :
septembre 2003, pics 1 et 2 de septembre 2005.
Application du BLUE pour : Correction des pluies radar Correction de S
ERDP,b ERDP,a ERDP ERDP,b ERDP,a ERDP
Septembre 2003 0.70 0.13 - 0.57 0.23 0.19 - 0.04
Septembre 2005 pic 1 0.67 0.09 - 0.58 0.37 0.08 - 0.29
Septembre 2005 pic 2 0.00 0.96 + 0.96 0.58 0.75 + 0.17
Tableau 35 : Comparaison des corrections effectuées par le BLUE. Correction des pluies
radar brutes ou correction de la condition initiale S suite à la correction des pluies radar
brutes par le MFB.
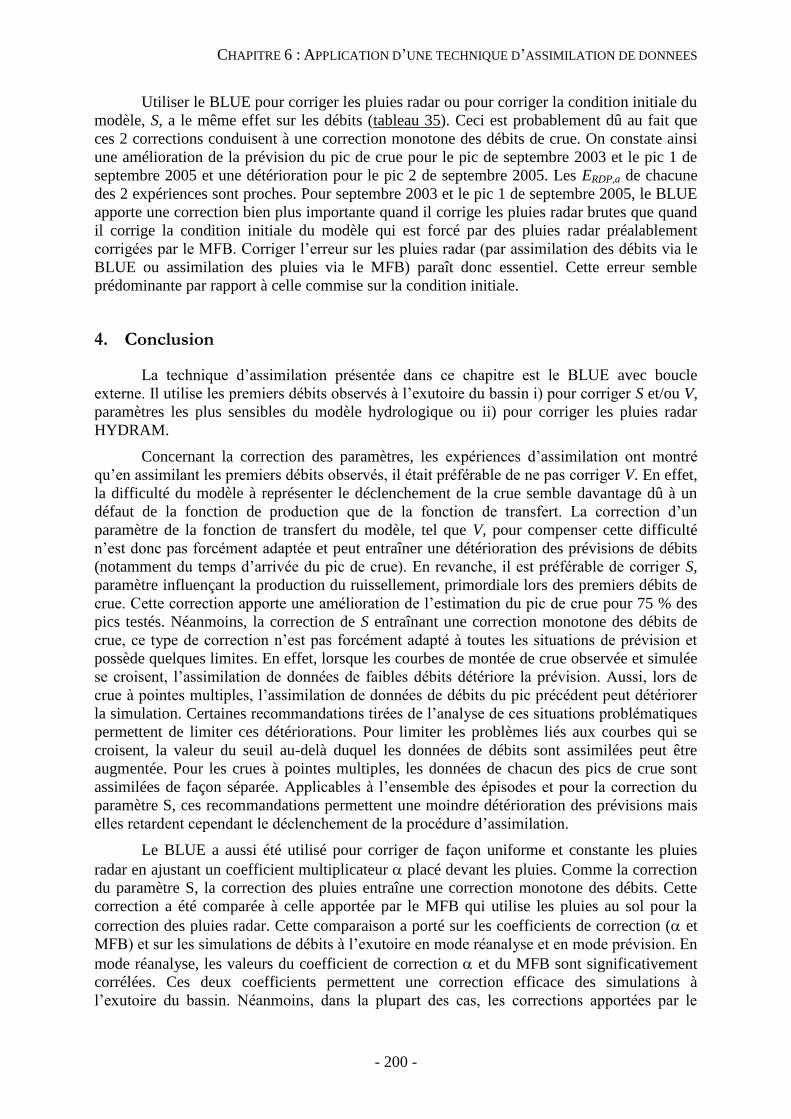
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 200 -
Utiliser le BLUE pour corriger les pluies radar ou pour corriger la condition initiale du
modèle, S, a le même effet sur les débits (tableau 35). Ceci est probablement dû au fait que
ces 2 corrections conduisent à une correction monotone des débits de crue. On constate ainsi
une amélioration de la prévision du pic de crue pour le pic de septembre 2003 et le pic 1 de
septembre 2005 et une détérioration pour le pic 2 de septembre 2005. Les ERDP,a de chacune
des 2 expériences sont proches. Pour septembre 2003 et le pic 1 de septembre 2005, le BLUE
apporte une correction bien plus importante quand il corrige les pluies radar brutes que quand
il corrige la condition initiale du modèle qui est forcé par des pluies radar préalablement
corrigées par le MFB. Corriger l’erreur sur les pluies radar (par assimilation des débits via le
BLUE ou assimilation des pluies via le MFB) paraît donc essentiel. Cette erreur semble
prédominante par rapport à celle commise sur la condition initiale.
4. Conclusion
La technique d’assimilation présentée dans ce chapitre est le BLUE avec boucle
externe. Il utilise les premiers débits observés à l’exutoire du bassin i) pour corriger S et/ou V,
paramètres les plus sensibles du modèle hydrologique ou ii) pour corriger les pluies radar
HYDRAM.
Concernant la correction des paramètres, les expériences d’assimilation ont montré
qu’en assimilant les premiers débits observés, il était préférable de ne pas corriger V. En effet,
la difficulté du modèle à représenter le déclenchement de la crue semble davantage dû à un
défaut de la fonction de production que de la fonction de transfert. La correction d’un
paramètre de la fonction de transfert du modèle, tel que V, pour compenser cette difficulté
n’est donc pas forcément adaptée et peut entraîner une détérioration des prévisions de débits
(notamment du temps d’arrivée du pic de crue). En revanche, il est préférable de corriger S,
paramètre influençant la production du ruissellement, primordiale lors des premiers débits de
crue. Cette correction apporte une amélioration de l’estimation du pic de crue pour 75 % des
pics testés. Néanmoins, la correction de S entraînant une correction monotone des débits de
crue, ce type de correction n’est pas forcément adapté à toutes les situations de prévision et
possède quelques limites. En effet, lorsque les courbes de montée de crue observée et simulée
se croisent, l’assimilation de données de faibles débits détériore la prévision. Aussi, lors de
crue à pointes multiples, l’assimilation de données de débits du pic précédent peut détériorer
la simulation. Certaines recommandations tirées de l’analyse de ces situations problématiques
permettent de limiter ces détériorations. Pour limiter les problèmes liés aux courbes qui se
croisent, la valeur du seuil au-delà duquel les données de débits sont assimilées peut être
augmentée. Pour les crues à pointes multiples, les données de chacun des pics de crue sont
assimilées de façon séparée. Applicables à l’ensemble des épisodes et pour la correction du
paramètre S, ces recommandations permettent une moindre détérioration des prévisions mais
elles retardent cependant le déclenchement de la procédure d’assimilation.
Le BLUE a aussi été utilisé pour corriger de façon uniforme et constante les pluies
radar en ajustant un coefficient multiplicateur placé devant les pluies. Comme la correction
du paramètre S, la correction des pluies entraîne une correction monotone des débits. Cette
correction a été comparée à celle apportée par le MFB qui utilise les pluies au sol pour la
correction des pluies radar. Cette comparaison a porté sur les coefficients de correction ( et
MFB) et sur les simulations de débits à l’exutoire en mode réanalyse et en mode prévision. En
mode réanalyse, les valeurs du coefficient de correction et du MFB sont significativement
corrélées. Ces deux coefficients permettent une correction efficace des simulations à
l’exutoire du bassin. Néanmoins, dans la plupart des cas, les corrections apportées par le
CHAPITRE 6 : APPLICATION D’UNE TECHNIQUE D’ASSIMILATION DE DONNEES
- 201 -
coefficient sont légèrement meilleures que celles apportées par le MFB. Cette amélioration
pourrait s’expliquer par le fait qu’assimiler des débits permet une correction des pluies radar
plus adaptée au bassin versant que la correction par le MFB qui utilise un vaste réseau de
pluviomètres au sol. De plus, l’estimation du par le BLUE ne nécessite que la chronique de
débits à l’exutoire alors que le MFB nécessite les données de nombreux pluviomètres. En
mode prévision, les résultats semblent moins satisfaisants. La corrélation entre le et le MFB
est moins satisfaisante qu’en réanalyse. Cette détérioration est due au fait que peu de données
sont assimilées comparé au mode réanalyse et que l’initialisation du modèle n’est pas
optimale et se fait avec un indicateur externe. Concernant l’estimation du pic de crue, la
correction en mode prévision permet dans 50% des cas d’améliorer la prévision de départ
réalisée avec des pluies radar brutes HYDRAM. Si les améliorations sont fortes, les
détériorations le sont aussi. Un ajustement de la matrice R permettrait peut être de limiter ces
détériorations. Cette correction des pluies radar par assimilation de débits pourrait aussi être
comparée à une correction des pluies radar effectuée par un MFB estimé en temps réel (et non
plus sur tout l’épisode). Enfin les expériences sur la correction des pluies radar ont été
effectuées sous pluies futures connues. Si des scénarios de pluies futures sont utilisés, leur
incertitude diffère de celle des pluies radar observées. On ne pourrait donc pas appliquer le
même coefficient correcteur aux observations et aux prévisions de pluie.

CONCLUSION GENERALE
- 203 -
CONCLUSION GENERALE
Ce travail a consisté à calibrer puis coupler un modèle hydrologique pluie-débit à une
procédure d’assimilation de débits pour contribuer à l'amélioration de la prévision des crues «
éclair ». L’étude a été menée sur le bassin versant du Lez en amont de Montpellier (114 km2),
bassin karstique, méditerranéen et soumis à des crues « éclair ». L’échantillon de crues retenu
contenait 27 épisodes répartis sur la période 1994 – 2008 et présentant une large gamme de
débits de pointe.
Un modèle pluie-débit à réservoir, événementiel, distribué et parcimonieux a été
proposé. Ce travail a fourni l'occasion de développer la fonction de production SCS, très
largement utilisée dans la communauté hydrologique, et a permis de lui adjoindre des
aménagements permettant de gérer l'intermittence temporelle des pluies et son influence sur le
ruissellement, ou de représenter un écoulement retardé lié au ressuyage des sols ou à la
vidange des réservoirs profonds. Combiné avec une fonction de transfert Lag and Route, ce
modèle parcimonieux a fourni des simulations satisfaisantes à l’exutoire du bassin pour la
plupart des crues. Quelques difficultés sont apparues pour certaines crues à pointes multiples
ou certaines crues présentant des débits faibles (< 40 m3/s).
L'initialisation de ce modèle de type événementiel a donné lieu à une réflexion sur la
représentation de l'état hydrique du bassin d'une part, et sur le choix des variables externes
pouvant être reliées à la condition initiale du modèle d'autre part. Sur le premier point, une
représentation sous forme d'un déficit hydrique initial (i.e. accroissement par rapport à un
niveau de référence) a été préférée à celle d'un degré de saturation réel de l'hydrosystème, et
permet de représenter les différentes dynamiques de vidange à l'aide d'un minimum de
paramètres. Sur le deuxième point, la condition initiale du modèle présente des variations
saisonnières marquées avec des valeurs supérieures à 200 mm pour les épisodes de début
d’automne et des valeurs inférieures à 200 mm pour les épisodes de fin d’automne. Elle a été
corrélée de façon significative à 2 indicateurs de l’état hydrique de l’hydrosystème en début
d’événement : l’indicateur d’humidité Hu2 du modèle SIM de Météo-France et la piézométrie
dans l’aquifère du Lez.
La qualité des pluies radar et leur impact sur la modélisation hydrologique ont aussi
été abordés. La comparaison des pluies radar avec les données de pluie au sol prises comme
référence a montré l’existence d’un biais systématique sur les mesures de pluie radar. Le
Mean Field Bias a permis d’évaluer ce biais et de le corriger avant d’introduire les pluies
radar dans le modèle hydrologique. La comparaison avec les pluies au sol a également montré
que les pluies de début d’automne sont bien estimées par le radar. Dans ce cas, la pluie radar,
plus représentative de la variabilité spatiale de la pluie sur le bassin que les pluies au sol,
conduit à une amélioration des simulations de débits à l’exutoire du bassin et/ou à une
meilleure estimation de la condition initiale du modèle. En revanche, pour les épisodes de fin
d’automne, les pluies sont moins bien estimées par le radar. Ceci s’explique par le fait qu’à
cette époque de l’année, la faible extension verticale du nuage et la faible altitude de
l’isotherme 0°C détériore la qualité de la mesure effectuée par le radar, situé à une distance
moyenne de 60 km par rapport au bassin du Lez. En fin d’automne, les simulations de débits à
l’exutoire du bassin et l’estimation de la condition initiale s’avèrent meilleures avec les pluies
au sol.
CONCLUSION GENERALE
- 204 -
Le modèle a ensuite été testé en mode prévision sous l’hypothèse de pluies futures connues.
Pour améliorer la prévision du pic de crue, une méthode d’assimilation de données a été
couplée avec le modèle hydrologique. Il s’agit du BLUE avec boucle externe. Dans le travail
présenté, cette méthode utilise les débits observés à l’exutoire du bassin avant la date de
prévision, pour corriger d’une part les paramètres les plus sensibles du modèle hydrologique
et d’autre part les pluies radar utilisées en entrée du modèle.
La correction a d’abord porté sur les paramètres les plus sensibles du modèle
hydrologique, à savoir S la condition initiale et V la vitesse de transfert. Les résultats montrent
que la correction de V entraîne une amélioration de l’estimation du pic de crue dans la
majorité des cas mais détériore le temps d’arrivée du pic. Cette détérioration peut s’expliquer
par le fait que l’erreur commise par le modèle en début de crue semble davantage liée à un
défaut de la fonction de production que de la fonction de transfert. La correction d’un
paramètre de la fonction de transfert du modèle, tel que V, pour compenser cette difficulté,
peut donc entraîner une détérioration des prévisions de débits et notamment du temps
d’arrivée du pic de crue. Il est préférable de corriger S qui permet d’améliorer l’estimation du
pic de crue sans détériorer le temps d’arrivée de ce dernier. Si elle est efficace dans la
majorité des cas, la seule correction de S a ses limites notamment dans le cas de crues à pics
multiples. Par ailleurs, le faible rendement du modèle dans la partie initiale de la montée de
crue est un handicap. Deux solutions permettent de contourner ces difficultés : augmenter le
seuil au-dessous duquel les données ne sont pas assimilées et n’assimiler que les données du
pic qu’on cherche à prévoir.
Le BLUE a également été utilisé pour corriger les pluies radar en entrée du modèle
hydrologique. La correction s’est faite de façon uniforme et constante par ajustement d’un
coefficient multiplicateur, , placé devant les pluies. La correction s’est d’abord effectuée en
mode réanalyse c’est-à-dire en considérant les débits de l’ensemble de l’épisode. Les résultats
ont montré une corrélation significative entre les coefficients et MFB. Concernant les
simulations de débits à l’exutoire, la correction par assimilation a donné des résultats
légèrement meilleurs que celle apportée par le MFB. Cette différence peu s’expliquer de deux
manières différentes. L’assimilation de débits à l’exutoire est une variable plus intégratrice du
comportement du bassin que la pluie mesurée en quelques points. Assimiler des débits à
l’exutoire permet peut-être aussi une correction plus adaptée au bassin du Lez car plus locale
que celle apportée par le MFB qui repose sur un vaste réseau de pluviomètre. La correction
par assimilation a aussi été effectuée en mode prévision c’est-à-dire en assimilant uniquement
les premiers débits observés à l’exutoire. Les résultats montrent une détérioration de la
relation entre les deux coefficients et MFB essentiellement due au fait que moins de
données de débit sont assimilées. Concernant la prévision du pic de débit, on n’obtient pas des
résultats très différents de ceux qu’on a obtenus en corrigeant la condition initiale du modèle
après que les pluies ont été corrigées par le MFB. Néanmoins ce mode prévision a l’avantage
de correspondre à une situation de prévision réelle.
Sur le plan logiciel enfin, ce travail a été facilité par l'utilisation de la plate-forme de
modélisation distribuée ATHYS (www.athys-soft.org), développée par HydroSciences
Montpellier. Le couplage modèle/assimilation a été rendu possible par l'utilisation du logiciel
PALM, développé par le CERFACS.
A la suite de ce travail, plusieurs questions peuvent se poser tant en modélisation
qu’en assimilation de données :
CONCLUSION GENERALE
- 205 -
- peut-on améliorer la structure et les performances du modèle ? Peut-on obtenir un modèle
plus parcimonieux ? : le modèle proposé compte 4 paramètres uniformes sur le bassin et
invariant dans le temps, et 1 paramètre uniforme sur le bassin et variable d'un épisode de crue
à l'autre. Il existe des dépendances entre ces paramètres, d'une part entre V et K0 pour le
transfert, d'autre part entre ds et w pour la production. Il semble possible de parvenir à un
système de 4 paramètres. La formulation de la vidange pourrait être également revue, vers une
représentation plus conforme à ce que l'on sait des transferts de l'eau dans le sol : on pourrait
substituer à w un seuil correspondant à une capacité au champ ou une réserve utile, qui
activerait ou désactiverait la vidange. Le lien entre les réservoirs pluie et sol dans le SCS-CN
n'est pas optimal, et doit être revu pour garantir que les coefficients de ruissellement sont
univoques pour des niveaux donnés dans le réservoir sol et dans le réservoir pluie.
- peut-on améliorer la relation entre la condition initiale du modèle et les indicateurs
d'humidité ou de piézométrie ? Est-il possible d’utiliser d’autres indicateurs pour initialiser le
modèle hydrologique ? L'incertitude principale est sans doute liée à l'estimation de la pluie sur
le bassin, qui se répercute directement sur l'estimation du paramètre S. Une étude similaire sur
un petit bassin de 4 km2, où on peut supposer que la variabilité spatiale de la pluie est moins
importante, montre que les coefficients de détermination R2 des relations entre S et Hu2
atteignent 0.7-0.8 (Tramblay et al., 2010). Les indicateurs sont eux-mêmes incertains, Hu2
compte tenu des informations fournies au modèle SIM, notamment sur les caractéristiques des
sols et de la végétation, et les niveaux piézométriques par manque de représentativité de
l'ensemble de l'hydrosystème. D'autres indicateurs pourraient être testés : sorties d'un modèle
journalier calé pour représenter l'état hydrique, comme le proposent Nalbantis (1995) ou
Javelle et al. 2010, mesures in situ de l'humidité des sols.
- peut-on mieux définir, et individualiser, les contributions aux crues des karsts et des
formations superficielles ? Une modélisation à base physique peut constituer une piste de
recherche intéressante, pour laquelle on dispose maintenant de données essentielles, dont
certaines ont été acquises en parallèle avec ce travail de thèse : infiltrométrie, mesures
d'humidités des sols, cartographie des sols et des formations superficielles. Il est maintenant
envisageable d'effectuer des tests en ce qui concerne la contribution des formations
superficielles, et d'obtenir des estimations des hydrogrammes provenant des sols présents sur
le bassin. Pour la composante karstique, plusieurs travaux récents ou en cours apportent des
informations concernant l'hydrodynamique des karsts, notamment les échanges « souterrain –
surface » [Bailly-Comte et al., 2008 ; Le Moine et al., 2008 ; Maréchal et al., 2008 ; De Waele
et al., 2010 ; Bailly-Comte et al., 2011, soumis].
- peut-on améliorer l'efficacité de la procédure d'assimilation de données ? Corriger d'autres
paramètres, variables d'entrée, variables d'état ? Combiner différentes corrections ? Les
corrections ont principalement porté sur la condition initiale du modèle et sur les pluies en
entrée du modèle. Il existe d'autres possibilités, qui n'ont pu être mises en œuvre dans le cadre
de cette thèse faute de temps. Il aurait été intéressant, par exemple, de corriger le paramètre de
pertes initiales du SCS, forfaitairement fixé à 20% de la valeur de S : ceci aurait pu remédier
aux mauvaises performances du modèle au début de la montée de crue. Il aurait également été
intéressant de corriger les pluies radar avec un coefficient variable dans le temps. La
correction de la condition initiale du modèle aurait pu être combinée à celle de la pluie en
entrée du modèle. Cette combinaison aurait pu se faire de façon simultanée par assimilation
des données de débits à l’exutoire avant la date de prévision ou de façon séquentielle en
corrigeant d’abord les pluies radar avec les données de pluie au sol puis la condition initiale
avec les données de débits. On pourrait aussi envisager de rectifier le niveau dans le réservoir,
à une date fixe avant la date de la prévision en assimilant d'autres données que les débits
comme par exemple les humidités des sols.

- 207 -
TABLE DES FIGURES
Figure 1 : Schéma représentant un bassin versant avec son entrée (pluie), son état hydrique et
ses sorties (évapotranspiration et débit) (d'après Musy). ......................................................... 12
Figure 2 : Schéma illustrant la génération du ruissellement par saturation par le haut
(ruissellement hortonien ou saturation par le bas (ruissellement sur surfaces saturées) (d’après
MUSY). .................................................................................................................................... 15
Figure 3 : Bloc diagramme représentant l’aquifère karstique (d’après Mangin, 1975). On
retrouve les 3 horizons composant le karst (épikarst, zone d’infiltration et karst noyé), les
drains ou conduits permettant la circulation de l’eau, les systèmes annexes au drainage
permettant le stockage et les modalités d’écoulements (notamment l’infiltration rapide et
lente). ........................................................................................................................................ 17
Figure 4 : Etat du système karstique de Marina Bay suite une période de sécheresse prolongée
avant une crue éclair karstique (d’après Bonacci et al., 2006). ................................................ 19
Figure 5 : Etat du système karstique au cours de la crue au moment où les conduits karstiques
sont sous pression et où des sources temporaires apparaissent (d’après Bonacci et al., 2006).
.................................................................................................................................................. 19
Figure 6 : Etat du système karstique au cours de la crue lorsque le niveau piézométrique est à
son maximum et sature le karst situé en contrebas (d’après Bonacci et al., 2006). ................. 20
Figure 7 : Les trois caractéristiques d’une mesure : extension, espacement, intégration
(d’après Blöschl et Sivapalan, 1995). ....................................................................................... 21
Figure 8 : Diagramme 3D illustrant la non-superposition des bassins topographique et
hydrogéologique pour Yport et Etretat en Pays de Caux (Normandie). YT et YP sont
respectivement les bassins topographique (17 km2) et hydrogéologique (104 km
2) d’Yport, ET
et EP sont respectivement les bassins topographique (145 km2) et hydrogéologique (46 km
2)
d’Etretat (tirée de Le Moine, 2008). ......................................................................................... 24
Figure 9 : Schéma d’un modèle pluie-débit simple. ................................................................. 26
Figure 10 : Schéma représentant la relation existant entre les données disponibles sur un
bassin, la complexité du modèle hydrologique et ses performances (d’après Grayson et
Blöschl, 2000). ......................................................................................................................... 28
Figure 11 : Principe de la méthode de Cressman. L’ébauche est représentée par la courbe
noire, les observations par les points bleus et l’analyse par la courbe rouge. .......................... 45
Figure 12 : Principe de fonctionnement du filtre de Kalman d’Ensemble (tiré et modifié de
Delplanque et al., 2011). Les ellipses grises schématisent la variance obtenue à partir des
différents membres (points blancs). Les flèches bleues représentent l’introduction des
observations permettant d’effectuer l’analyse. ......................................................................... 50
Figure 13 : Assimilation de données séquentielle et non séquentielle (d’après Bouttier et
Courtier, 1999). ........................................................................................................................ 56
Figure 14 : Composantes du modèle sur lesquelles la procédure d’assimilation de données
peut agir : (1) les entrées, (2) les paramètres, (3) les variables d’état et (4) les sorties. .......... 57
Figure 15 : localisation géographique du Lez et de sa source. ................................................. 64
- 208 -
Figure 16 : diagramme ombrothermique de la station de Montpellier-Fréjorgues sur la période
1951 – 2001 [PLU, édition juillet 2007]. ................................................................................. 65
Figure 17 : Variations des cumuls annuels de pluies à la station de Prades. .......................... 66
Figure 18 : Illustration d’un système convectif en forme de V (en haut) et des pluies
orographiques cévenoles (en bas). ........................................................................................... 67
Figure 19 : Organisation de l’hydrosystème du Lez. ............................................................... 69
Figure 20 : disposition des forages sur le site du captage de la source du Lez [Marjolet et
Salado, fasc III, 1975]. ............................................................................................................. 71
Figure 21 : Coupe schématique réalisée à l’aplomb du site du captage du Lez [Marjolet et
Salado, fasc III, 1975]. ............................................................................................................. 72
Figure 22 : rosaces de fracturation (en nombre de fractures) pour le site du Terrieu effectuée à
partir de photographies aériennes (à gauche) et sur station microtectonique à droite [Drogue et
Grillot, 1976]. ........................................................................................................................... 73
Figure 23 : essai de pompage sur le puits central du site du Terrieu révélant deux directions
d’écoulement préférentiel proches des directions principales de fracturation [Drogue et
Grillot, 1976 in Botton, 1984]. ................................................................................................. 74
Figure 24 : diagrammes synthétisant les principaux résultats de l’étude de la fracturation sur le
site de Corconne [Botton, 1984]. ............................................................................................. 75
Figure 25 : coupe schématique de l’épikarst du site de Corconne [Botton, 1984]. ................ 76
Figure 26 : Carte géologique simplifiée de l’aquifère du Lez. ................................................. 77
Figure 27 : Coupe schématique représentant le fonctionnement de la source du Lez. ............ 80
Figure 28 : Hydrographie du Lez. ............................................................................................ 81
Figure 29 : carte pédologique du bassin topographique du Lez à Lavalette. ........................... 83
Figure 30 : Carte d’occupation des sols établie à partir des données Corine Land Cover 2006.
.................................................................................................................................................. 84
Figure 31 : Isohyètes des précipitations moyennes annuelles calculées sur la période 1964 –
1981 montrant la répartition spatiale de la pluviométrie sur l’aquifère du Lez [Thiery et
Bérard, 1983]. ........................................................................................................................... 85
Figure 32 : Hydrogramme donnant les débits mensuels moyens interannuels [banque hydro
DIREN] à la source du Lez et à Lavalette. ............................................................................... 90
Figure 33 : Extrait de la carte du SAGE « Lez Mosson Etangs palavasiens » montrant les
principaux prélèvements effectués sur le Lez entre la source et Lavalette. ............................. 91
Figure 34 : Localisation des pluviographes et pluviomètres utilisés. ...................................... 97
Figure 35 : Localisation des différentes stations de jaugeage situées sur le Lez et ses affluents
en amont de Montpellier. ......................................................................................................... 99
Figure 36 : Courbe de tarage établie à Lavalette (courbe rouge) à partir des jaugeages
effectués à cette même station (points bleus) entre 1975 et 2000. Les deux points verts
correspondent aux deux jaugeages de décembre 2002 effectués plus en aval. ...................... 100
Figure 37 : Utilisation de la récession log(Q) = f(t) de la crue d’octobre 2008 pour déterminer
la date de fin de l’épisode (tfin) ainsi que le débit de début des écoulements retardés (Q0) et la
pente de la droite des écoulements retardés. ....................................................................... 103
- 209 -
Figure 38 : régressions linéaires entre les cumuls des 20 pluviomètres et ceux des 20 pixels
radar correspondants pour l’épisode d’octobre 2008 avant correction (droite bleue) et après
correction avec le MFB (droite rouge). La droite noire correspond à la droite y=x pour
laquelle les cumuls des pluviomètres correspondent exactement aux cumuls des pixels radar
correspondants. ....................................................................................................................... 107
Figure 39 : Evolution de l’indice Hu2 au cours de l’année en moyenne sur la période 1994 –
2008 (courbe noire), pour l’année 1998 (courbe rouge) ou pour l’année 2002 (courbe bleue).
................................................................................................................................................ 112
Figure 40 : Localisation des piézomètres appartenant à l’aquifère du Lez. ........................... 113
Figure 41 : Identification des périodes de débordement à partir de la chronique de niveaux
piézométriques à la source du Lez (en bleu). Les périodes de tarissement sont celles situées
entre les périodes de débordement. ........................................................................................ 114
Figure 42 : Choix du pas d’échantillonnage pour une période de débordement donnée. Les
chroniques concernées (graphique du haut) sont la piézométrie à Bois des Avants (en rouge)
et le débit à la source du Lez (en vert). .................................................................................. 115
Figure 43 : Corrélations entre le piézomètre de Bois des Avants et la source du Lez.
Corrélation piézométrie – piézométrie en période de tarissement de la source du Lez
(graphique du haut) et corrélation piézométrie – débit en période de débordement de la source
du Lez (graphique du bas). ..................................................................................................... 116
Figure 44 : Relation entre le cumul de pluie et le débit de pointe de l’épisode. .................... 119
Figure 45 : Schéma présentant l’organisation générale du modèle. ....................................... 123
Figure 46 : Représentations possibles de l’état hydrique d’un bassin par un modèle à
réservoir. S représente la taille du réservoir et h(t0) représente le niveau dans le réservoir en
début d’épisode. A gauche l’état hydrique de l’hydrosystème en début d’épisode et à droite sa
représentation par le modèle à réservoir. ............................................................................... 124
Figure 47 : Fonction de production SMA-SCS sans vidange du réservoir sol. ..................... 126
Figure 48 : Fonction de production SCS-CN sans vidange du réservoir pluie. ..................... 127
Figure 49 : Fonction de production SMA-SCS aménagée avec vidange et écoulement retardé.
................................................................................................................................................ 129
Figure 50 : Fonction de production SCS-CN aménagée avec vidange et écoulement retardé.
................................................................................................................................................ 131
Figure 51 : schéma de la fonction de transfert « Lag and Route Simple ». ........................... 132
Figure 52 : Hydrogrammes observés (en tirets bleus) et simulés avec la fonction de production
SMA-SCS (en trait continu vert) pour les 6 épisodes de crue testés. Les zones entourées
repèrent les périodes en début d’épisode où le SMA-SCS produisait du ruissellement direct
alors que ce dernier n’a pas commencé en réalité. ................................................................. 135
Figure 53 : Comparaison de l’évolution de la piézométrie à Gour Noir (en tirets bleus) avec
celle du niveau dans le réservoir « sol » des fonctions de production SMA-SCS (en trait vert
continu) pour chacun des 6 épisodes de crue. ........................................................................ 137
Figure 54 : En haut, comparaison des hydrogrammes observé (tirets bleues) et simulés avec
une vidange de ds = 0.28 j-1
(courbe grise avec les cercles) ou de ds = 0.01 j-1
(courbe grise
avec les croix). En bas, comparaison des niveaux piézométriques normalisés à Gour Noir
- 210 -
(tirets bleus) et des niveaux normalisés dans le réservoir « sol » pour une vidange de ds = 0.28
j-1
(courbe grise avec les cercles) ou ds = 0.01 j-1
(courbe grise avec les croix). ................... 139
Figure 55 : Hydrogrammes observés (en tirets bleus) et simulés avec la fonction de production
SMA-SCS (en trait continu vert) ou SCS-CN (en trait continu noir) pour les 6 épisodes de
crue testés. .............................................................................................................................. 141
Figure 56 : Comparaison de l’évolution de la piézométrie à Gour Noir (en tirets bleus) avec
celle du niveau dans le réservoir « sol » des fonctions de production SMA-SCS (en trait
continu vert) et SCS-CN (en trait continu noir), pour chacun des 6 épisodes de crue. .......... 142
Figure 57 : Comparaison de l’hydrogramme observé (en tirets bleu) avec celui de la
simulation « de référence » (en noir) pour l’épisode d’octobre 2001. ................................... 144
Figure 58 : Tests de sensibilité sur les paramètres ds (à gauche) et w (à droite). Qref (en trait
noir continu) est la simulation de référence ; Qpert (en pointillés noirs) est la simulation
réalisée avec le paramètre perturbé de +10% ; Q (en pointillés rouges) est l’écart de débit
entre les deux simulations Qref et Qpert. .................................................................................. 145
Figure 59 : Ecoulements retardés simulés pour l’épisode d’octobre 2001 avec 3 valeurs de ds
différentes : ds = 0.14 j-1
(courbe rouge) ; ds = 0.28 j-1
(courbe verte) et ds = 0.56 j-1
(courbe
bleue). ..................................................................................................................................... 145
Figure 60 : Ecoulements retardés simulés pour l’épisode d’octobre 2001 avec 3 valeurs de w
différentes (w = 46 mm ; w = 92 mm et w = 139 mm) permettant 3 taux différents de
participations de la vidange aux crues de surface : min(1,w/S) = 1/3 (courbe rouge) ;
min(1,w/S) = 2/3 (courbe verte) ; min(1,w/S) = 1 (courbe bleue). ........................................ 146
Figure 61 : Tests de sensibilité sur le paramètre K0. Qref (en trait noir continu) est la
simulation de référence ; Qpert (en pointillés noirs) est la simulation réalisée avec le paramètre
perturbé de +10% ; Q (en pointillés rouges) est l’écart de débit entre les deux simulations
Qref et Qpert. ............................................................................................................................. 147
Figure 62 : Hydrogrammes simulés pour l’épisode d’octobre 2001 avec 3 valeurs de K0
différentes : K0 = 0.15 (courbe rouge) ; K0 = 0.3 (courbe verte) et K0 = 0.6 (courbe bleue). 147
Figure 63 : Tests de sensibilité sur les paramètres V (à gauche) et S (à droite). Qref (en trait
noir continu) est la simulation de référence ; Qpert (en pointillés noirs) est la simulation
réalisée avec le paramètre perturbé de +10% ; Q (en pointillés rouges) est l’écart de débit
entre les deux simulations Qref et Qpert. .................................................................................. 148
Figure 64 : Régression linéaire établie entre la valeur calibrée de la condition initiale du
modèle S et la valeur de l’indice Hu2 pris en début d’épisode. ............................................. 152
Figure 65 : Régression linéaire établie entre la valeur calibrée de la condition initiale du
modèle S et la piézométrie à Claret prise en début d’épisode. ............................................... 153
Figure 66 : Comparaison du niveau dans le réservoir « sol » du modèle (en noir) à l’humidité
à 20 cm mesurée in situ à la station de Saint-Gély (en tirets verts) ou à la piézométrie mesurée
à Gour Noir (en tirets bleus) ou Bois Saint-Mathieu (tirets rouges) pour l’épisode d’octobre
2008. ....................................................................................................................................... 156
Figure 67 : Comparaison du niveau dans le réservoir « sol » du modèle (en noir) et la
piézométrie à Gour Noir (en tirets bleus) pour les épisodes de septembre 2002 (à gauche) et
décembre 2002 (à droite). ....................................................................................................... 157
Figure 68 : Exemple de septembre 2002 présentant l’hydrogramme observé à Lavalette et
celui de la source du Lez transféré à Lavalette. ..................................................................... 159

- 211 -
Figure 69 : Estimation des débits au pas de temps ti = 14 : débit H(x) calculé par le modèle
non linéaire H (courbe noire); estimation Hxl(x-xl) par le modèle linéarisé H autour du point
de linéarisation xl = xb = 50 mm pour la première itération (droite rouge) de la boucle externe;
autour du point de linéarisation xl2 = x
a1 = 120 mm pour la deuxième itération (droite bleue).
................................................................................................................................................ 165
Figure 70 : Fonction coût J(x) (courbe noire) et son minimum (cercle noir); fonction coût
incrémentale J(xl ; x) (parabole rouge pour la première itération et bleue pour la deuxième);
évolution du minimum xa de la fonction coût incrémentale (cercle rouge en x
a1 = 120 mm
pour la première itération et bleue en xa2 = 140 mm pour la deuxième) au point de
linéarisation xl (croix rouge en xl = xb = 50 mm pour la première itération et croix bleue en xl2
= xa1 = 120 mm pour la deuxième) pour les 2 premières itérations de la boucle externe. ..... 166
Figure 71 : Implémentation sous PALM de la technique du BLUE et de sa boucle externe
autour du modèle hydrologique. ............................................................................................. 168
Figure 72 : Hydrogrammes observé (courbe bleue), simulé à partir de l’ébauche Sb = 160 mm
(courbe noire) et simulé à partir de l’analyse Sa = 131 mm (courbe rouge) après assimilation
d’une donnée (croix bleue) pour l’épisode d’octobre 2001. Le trait vertical noir sépare la
période d’assimilation de la période de prévision. ................................................................. 173
Figure 73 : Boîtes à moustaches représentant la distribution du critère (ERDP) (en haut) et du
critère (Etp) (en bas) pour les 3 types de correction réalisés. Les croix rouges correspondent
aux valeurs extrêmes. ............................................................................................................. 177
Figure 74 : Distribution des valeurs du critère (ERDP) pour les 20 pics de crues pour
différentes valeurs de l’écart-type d’erreur d’observation. La médiane est en trait rouge, les
quartiles en traits bleus, les déciles en traits noirs et les extrêmes en croix rouges. .............. 178
Figure 75 : Résultats de l’assimilation de données pour l’épisode de décembre 1997. La
courbe bleue correspond aux observations ; la courbe noire est l’hydrogramme simulé à partir
de l’ébauche (avant assimilation) et la courbe rouge est l’hydrogramme simulé à partir de
l’analyse (après assimilation). Les croix bleues sont les données assimilées. ....................... 180
Figure 76 : Résultats de l’assimilation de données pour l’épisode de septembre 2005. La
courbe bleue correspond aux observations ; la courbe noire est l’hydrogramme simulé à partir
de l’ébauche (avant assimilation) et la courbe rouge est l’hydrogramme simulé à partir de
l’analyse (après assimilation). Les croix bleues sont les données assimilées. ....................... 181
Figure 77 : Hydrogrammes issus du cas virtuel réalisé en « assimilation groupée »
(hydrogramme de gauche) et en « assimilation séparée » (hydrogramme de droite). La courbe
rouge représente l’hydrogramme obtenu à partir de l’analyse, la courbe bleue représente l’état
vrai, les croix bleues correspondent aux observations, les ronds bleus sont les observations
assimilées. Le trait noir vertical représente l’instant de prévision. ........................................ 182
Figure 78 : Efficacité de la correction des pluies par le BLUE en mode réanalyse.
L’hydrogramme en bleu correspond aux débits observés à l’exutoire, l’hydrogramme en noir
représente les débits simulés à partir de l’ébauche ( = 1), l’hydrogramme en rouge représente
les débits simulés à partir de l’analyse ( = 1.70), les croix bleues représentent les débits
observés qui ont été assimilés, le hyétogramme (histogramme bleue) représente la pluie
moyenne calculée à partir des pluies HYDRAM non corrigées. ........................................... 187
Figure 79 : Efficacité de la correction des pluies par le BLUE en mode prévision.
L’hydrogramme en bleu correspond aux débits observés à l’exutoire, l’hydrogramme en noir
représente les débits simulés à partir de l’ébauche ( = 1), l’hydrogramme en rouge représente
- 212 -
les débits simulés à partir de l’analyse ( = 1.51), les croix bleues représentent les débits
observés qui ont été assimilés jusqu’à 3h avant le pic de crue, le trait noir représente l’instant
de la dernière donnée assimilée, le hyétogramme (hystogramme bleu) représente la pluie
moyenne calculée à partir des pluies HYDRAM non corrigées. ........................................... 189
Figure 80 : régression linéaire établie entre le Mean Field Bias (MFB) et le coefficient
calculé par le BLUE en mode réanalyse. ............................................................................... 190
Figure 81 : régression linéaire établie pour les épisodes de début d’automne entre le Mean
Field Bias et le coefficient calculé par le BLUE en mode réanalyse. ................................. 191
Figure 82 : régression linéaire établie pour les épisodes de fin d’automne et d’hiver entre le
Mean Field Bias et le coefficient calculé par le BLUE en mode réanalyse........................ 191
Figure 83 : régression linéaire établie entre le Mean Field Bias (MFB) et le coefficient
calculé par le BLUE en mode prévision avec la condition initiale calibrée (Scal). ................ 195
Figure 84 : régression linéaire établie entre le Mean Field Bias (MFB) et le coefficient
calculé par le BLUE en mode prévision avec la condition initiale obtenue à partir de la
régression linéaire établie entre Scal et Hu2 (Sreg). ................................................................. 195
Figure 85 : Différence entre le ERDP,a obtenu avec un modèle initialisé avec Sreg et le ERDP,a
obtenu avec un modèle initialisé avec Scal. ............................................................................. 199
- 213 -
TABLE DES TABLEAUX
Tableau 1 : Récapitulatif des symboles, noms et définitions des erreurs utilisées en
assimilation de données. ........................................................................................................... 42
Tableau 2 : récapitulatif des notations utilisées en assimilation de données. .......................... 43
Tableau 3 : Récapitulatif géologique et hydrogéologique des séries du bassin du Lez (d’après
Bérard, 1983). ........................................................................................................................... 70
Tableau 4 : Quelques crues historiques du Lez. ....................................................................... 86
Tableau 5 : Quelques caractéristiques des 6 crues étudiées par Lafare, 2007. ........................ 88
Tableau 6 : Quelques données hydrologiques sur les crues d’octobre 2001 et septembre 2002.
.................................................................................................................................................. 89
Tableau 7 : Délimitation des épisodes dépassant un cumul de 90 mm et/ou un débit de pointe
de 45 m3/s. P cumul de pluie à Prades, QHp, débit de pointe horaire à Lavalette. ................ 102
Tableau 8 : Coefficients de détermination des régressions linéaires établies pour chaque
épisode entre les données de pluies au sol et les données de pluies radar. Re2 désigne le
coefficient de détermination calculé à partir des cumuls de pluie sur l’épisode et Rh,moy 2
désigne le coefficient de détermination moyen calculé à partir des chroniques horaires. ..... 105
Tableau 9 : Valeur du coefficient de correction « Mean Field Bias » et valeurs des coefficients
des droites de régression ajustées sur les cumuls de pluie avant et après correction avec le
MFB. ...................................................................................................................................... 106
Tableau 10 : Caractéristiques des 27 épisodes retenus. ......................................................... 109
Tableau 11 : Résultats des corrélations effectuées en période de tarissement de la source du
Lez entre les piézomètres de l’aquifère du Lez et le piézomètre de la source du Lez. Rmoy2
correspond à la moyenne des R2 calculés pour les 1000 échantillonnages réalisés, R2 est
l’écart des R2, NP est le nombre de points utilisés pour la corrélation et NP l’écart-type de
NP. .......................................................................................................................................... 117
Tableau 12 : Résultats des corrélations effectuées en période de débordement de la source du
Lez entre les piézomètres de l’aquifère du Lez et les débits à la source du Lez. Rmoy2
correspond à la moyenne des R2 calculés pour les 1000 échantillonnages réalisés, R2 est
l’écart des R2, NP est le nombre de points utilisés pour la corrélation et NP l’écart-type de
NP. .......................................................................................................................................... 117
Tableau 13 : Valeurs de l’indice d’humidité Hu2 et de la piézométrie à la source du Lez en
début d’épisode. Ce tableau rappelle aussi les valeurs du débit de pointe horaire (QHp) et du
cumul de pluie à Prades. ......................................................................................................... 118
Tableau 14 : Caractéristiques des 6 épisodes de crue sélectionnés. QHp est le débit de pointe
horaire, Hu2ini est la valeur de l’indice d’humidité Hu2 au début de l’épisode de crue. La
piézométrie à la source du Lez est celle qui est prise en début d’épisode. ............................ 133
Tableau 15 : Fonction de production SMA-SCS – Calibration de la condition initiale Vo et du
paramètre w pour les 6 épisodes testés (ds = 0.28 j-1
). ........................................................... 134
Tableau 16 : Fonction de production SMA-SCS – Calibration de la condition initiale Vo et du
paramètre w pour les 6 épisodes testés (ds=0.01 j-1
). ............................................................. 138
- 214 -
Tableau 17 : Fonction de production SCS-CN – Calibration de la condition initiale S et du
paramètre w pour les 6 épisodes testés (ds=0.28 j-1
). ............................................................. 140
Tableau 18 : Valeurs du critère de Nash pour une participation de la vidange du réservoir
« sol » fixe ou variable selon les épisodes en fonction de la condition initiale S. Lorsque est
variable w est fixé à 101 mm. ................................................................................................ 143
Tableau 19 : Résultats des simulations des 21 épisodes retenus pour la calibration. Valeurs de
la condition initiale et du critère de Nash obtenues avec les données de pluie au sol et de pluie
radar (traitement HYDRAM ou CALAMAR) pour le jeu de paramètres suivant : ds = 0.28 j-
1 ; w = 101 mm ; V = 1.3 m/s ; K0 = 0.3 ................................................................................ 150
Tableau 20 : Résultats des simulations des 6 petites crues présentant un faible débit de pointe
(QHp < 30 m3/s). Valeurs de la condition initiale et du critère de Nash obtenues avec les
données de pluies au sol et les données de pluie radar (traitement HYDRAM) pour le jeu de
paramètres suivant : ds = 0.28 j-1
; w = 101 mm ; V = 1.3 m/s ; K0 = 0.3 ............................. 151
Tableau 21 : Caractéristiques des hydrogrammes de Lavalette (débits observés) et de la source
du Lez (débits observés ou transférés à Lavalette). VécS est le volume écoulé à la source du
Lez VécL est le volume écoulé à Lavalette, QHpS et QHptS sont respectivement les débits de
pointe à la source avant et après transfert à Lavalette, tQHpS et tQHptS sont respectivement les
temps d’arrivée du débit de pointe à la source avant et après transfert à Lavalette, QHpL est le
débit de pointe observé à Lavalette. ....................................................................................... 158
Tableau 22 : Valeurs et temps d’arrivée des débits de pointe de chaque pic de crue. tQHXL et
QHXL sont respectivement le temps d’arrivée et la magnitude du pic de crue à Lavalette ;
tQHXtS est le temps d’arrivée du pic de crue de la source du Lez transféré à Lavalette ;
t(QHX) est la différence entre le temps d’arrivée du pic de crue de la source du Lez
(transféré à Lavalette) et celui du pic de crue à Lavalette. ..................................................... 160
Tableau 23 : Caractéristiques des épisodes de crue utilisés pour la correction des paramètres
du modèle par 'assimilation de données. QHp, débit de pointe horaire (m3/s) ; tr, temps de
réponse (temps entre le pic de pluie et le pic de débit) (h); P, cumul de pluie moyen (mm)
calculé selon la méthode de Thiessen. ................................................................................... 170
Tableau 24 : Résultats de la correction de S ; Sb, valeur d’ébauche ; S
a, valeur de l’analyse ;
ERDP,b et ERDP,a, écarts relatifs au débit de pointe observé respectivement avant et après
assimilation ; (ERDP) gain apporté par l’assimilation de données sur l’estimation du débit de
pointe ; tpb et tpa décalage en temps entre les débits de pointe simulé et observé
respectivement avant et après assimilation ; (tp) gain apporté par l’assimilation sur
l’estimation du temps d’arrivée du pic de crue. ..................................................................... 174
Tableau 25 : Résultats de la correction de V ; Vb, valeur d’ébauche ; V
a, valeur de l’analyse ;
ERDP,b et ERDP,a, écarts relatifs au débit de pointe observé respectivement avant et après
assimilation ; (ERDP) gain apporté par l’assimilation de données sur l’estimation du débit de
pointe ; tpb et tpa décalage en temps entre les débits de pointe simulé et observé
respectivement avant et après assimilation ; Etp) gain apporté par l’assimilation sur
l’estimation du temps d’arrivée du pic de crue. ..................................................................... 175
Tableau 26 : Résultats de la correction de S et V ; Sb et V
b, valeurs d’ébauche ; S
a et V
a,
valeurs de l’analyse ; ERDP,b et ERDP,a, écarts relatifs au débit de pointe observé respectivement
avant et après assimilation ; (ERDP) gain apporté par l’assimilation de données sur
l’estimation du débit de pointe ; tpb et tpa décalage en temps entre les débits de pointe
simulé et observé respectivement avant et après assimilation ; (tp) gain apporté par
l’assimilation sur l’estimation du temps d’arrivée du pic de crue. ......................................... 176
- 215 -
Tableau 27 : Comparaison du nombre de données assimilées et du critère ERDP pour un seuil
sur les débits observés fixé à 20 ou 60 m3/s. .......................................................................... 181
Tableau 28 : Valeurs du critère sur le débit de pointe en assimilation groupée et séparée pour
différentes erreurs d’estimation de la 2ème
pluie du cas fictif. ................................................ 183
Tableau 29 : Caractéristiques des épisodes utilisés pour la correction des pluies en entrée du
modèle par assimilation de données. MFB est le Mean Field Bias ; Re2 est le coefficient de
détermination calculé entre les cumuls de pluie au sol et les cumuls de pluie radar ; Rh2 est la
moyenne des coefficients de détermination calculés entre les chroniques de pluies horaires sol
et radar ; QHp est le débit de pointe horaire de l’épisode. ..................................................... 184
Tableau 30 : Valeurs prises par le paramètre S après calibration (Scal) et après initialisation
(Sreg) avec la régression linéaire avec l’indicateur d’humidité Hu2 pris en début d’épisode
(Hu2ini).................................................................................................................................... 188
Tableau 31 : Résultats des expériences réalisées sur les 18 épisodes. Scal est la valeur du S
calibré obtenue au chapitre 5. MFB est le Mean Field Bias calculé à partir du réseau de 20
pluviomètres présenté au chapitre 4. est le coefficient de correction obtenue après
assimilation par le BLUE. Nashini. NashMFB et Nash sont les Nash calculés sur les débits à
l’exutoire et obtenus respectivement avant correction des pluies radar. après application du
MFB ou après application du coefficient aux pluies radar non corrigées. Nash1 est la
différence entre Nash et Nashini et Nash2 est la différence entre Nash et NashMFB. ........ 192
Tableau 32 : Valeurs du MFB et du calculé par le BLUE en mode prévision avec le S
obtenu après calibration (Scal) et le S obtenu à partir de la régression linéaire avec l’indicateur
Hu2 (Sreg). ............................................................................................................................... 194
Tableau 33 : Résultats en mode prévision de la correction du BLUE appliqué au modèle
hydrologique initialisé avec Scal. Scal est la valeur de obtenue après assimilation de
données, ERDP,b(Scal) et ERDP,a(Scal) sont respectivement les écarts relatifs au débit de pointe
observé avant et après assimilation, ERDP(Scal) est la différence entre ERDP,a(Scal) et
ERDP,b(Scal), Etpb(Scal) et Etpa(Scal) correspondent au décalage temporel existant entre le débit
de pointe simulé et le débit de pointe observé respectivement avant et après assimilation,
Etp(Scal) est la différence entre Etpb(Scal) et Etpa(Scal). ........................................................ 197
Tableau 34 : Résultats en mode prévision de la correction du BLUE appliqué au modèle
hydrologique initialisé avec Sreg obtenue à partir de la régression linéaire établie entre Scal et
Hu2. Sreg est la valeur de obtenue après assimilation de données, ERDP,b(Sreg) et ERPD,a(Sreg)
sont respectivement les écarts relatifs au débit de pointe observé avant et après assimilation,
ERDP(Sreg) est la différence entre ERPD,a(Sreg) et ERDP,b(Sreg), Etpb(Sreg) et Etpa(Sreg)
correspondent au décalage temporel existant entre le débit de pointe simulé et le débit de
pointe observé avant et après assimilation, Etp(Sreg) est la différence entre Etpa(Sreg) et
Etpb(Sreg). ................................................................................................................................ 198
Tableau 35 : Comparaison des corrections effectuées par le BLUE. Correction des pluies
radar brutes ou correction de la condition initiale S suite à la correction des pluies radar brutes
par le MFB. ............................................................................................................................ 199

REFERENCES BIBLIOGRAPHIQUES
- 217 -
REFERENCES BIBLIOGRAPHIQUES
Ahsan, M. and O’ Connor, K.M., 1994. A reappraisal of the Kalman filtering technique,
as applied in river flow forecasting. Journal of Hydrology, 161: 197-226.
Albergel, J., Moussa, R. and Chahinian, N., 2003. Les processus hortoniens et leur
importance dans la genèse et le développement des crues en zone semi-arides : genèse des
crues et des inondations : compréhension actuelle des phénomènes physiques (1re partie). La
Houille Blanche, 6: 65-73.
Albergel, C. et al., 2008. An evaluation of ASCAT surface soil moisture products with in-
situ observations in southwestern France. Hydrology and Earth System Sciences Discussions,
5: 2221-2250.
Albinet, M., 1996. Le domaine karstique du bassin Rhône-Méditerranée-Corse. Les
interventions de l’Agence de l’Eau.
Alfieri, L., Claps, P. and Laio, F., 2010. Time-dépendent Z-R Relationships for estimating
rainfall fields from radar measurements. Natural Hazards and Earth System Sciences, 10: 149-
158.
Ambroise, B., 1999. La dynamique des cycles de l’eau dans un bassin versant- Processus,
Facteurs, Modèles. Editions *H*G*A*, Bucarest, 204 p.
Ambroise, B., Perrin, J.L. and Reutenauer, D., 1995. Multicriterion validation of a
semidistributed conceptual model of the water cycle in the Fecht catchment (Vosges massif,
France). Water Resources Research, 31(6): 1467-1481.
Arnaud, P., Bouvier, C., Cisneros, L. and Dominguez, R., 2002. Influence of rainfall
spatial variability on flood prediction. Journal of Hydrology, 260: 216-230.
Arnaud, P. and Lavabre, J., 2000. La modélisation stochastique des pluies horaires et leur
transformation en débits pour la prédétermination des crues. Revue des sciences de l’eau,
13(4): 441-462.
Aubert, D., Loumagne, C. and Oudin, L., 2003. Sequential assimilation of soil moisture
and streamflow data in a conceptual rainfall-runoff model. Journal of Hydrology, 280: 145-
161.
Audard-Vincendon, B., 2010. Apport des modèles météorologiques de résolution
kilométrique pour la prévision des crues rapides méditerranéennes : vers une prévision
d’ensemble des débits en région Cévennes-Vivarais, Université Toulouse III - Paul Sabatier,
242 pp.
Audra, P. et al., 2004. The effect of the Messinian Deep Stage on karst development
around the Mediterranean Sea. Examples from Southern France. Geodinamica Acta, 17(6):
27-38.
Avias, J., 1988. Rapport sur l’état des études entreprises sur la partie est du Causse de
Viols-le-Fort au 31 août 1988. CERGA, Montpellier, 7 pp.
Avias, J., 1992. Karstic aquifer of mediterranean type, geological controls: Lez spring
(North Montpellieran karsts) example. IAH, Hydrogeology of selected karst regions, 13: 89-
113.
REFERENCES BIBLIOGRAPHIQUES
- 218 -
Avias, J. and Legrand, B., 1989. Fonctionnement hydrogéologique, vulnérabilité et
protection contre la pollution de l’aquifère de la source du Lez - Rapport d’activité 1989.
CERGA, Montpellier, 26 pp.
Ayral, P.A., 2005. Contribution à la spatialisation du modèle opérationnel de prévision
des crues éclair ALHTAÏR. Approches spatiale & expérimentale. Application au bassin
versant du Gardon d’Anduze, Université de Provence (Aix-Marseille), 311 pp.
Bailly-Comte, V., Borrell-Estupina, V., Jourde, H. and Pistre, S., 2011. Influence of karst
aquifers on flood genesis and propagation in an ephemeral Mediterranean River: A semi-
distributed conceptual model of the Coulazou River (Southern France). Submitted in Water
Resources Research.
Bailly-Comte, V., Jourde, H., Roesch, A., Pistre, S. and Batiot-Guilhe, C., 2008. Time
series analyses for Karst/River interactions assessment : Case of the Coulazou river (southern
France). Journal of Hydrology, 349: 98-114.
Bakalowicz, M., 1996. Le karst. Sa place dans le monde et en Europe. Séminaire « Pour
une gestion active des ressources en eau d’origine karstique, Montpellier, 27-29/11/1996, 29-
32.
Bakalowicz, M., 2008. Le milieu karstique : études et perspectives, identification et
caractérisation de la ressource. Colloque Hydrogéologie et Karst au travers des travaux de
Michel Lepillers, 11-27.
Bech, J., Codina, B., Lorente, G. and Bebbington, D., 2003. The sensitivity of single
polarization weather radar beam blocage correction to variability in the vertical refractivity
gradient. Journal Of Atmospheric and Oceanic Technology: 845-855.
Bérard, P., Thiery, D. and Camus, A., 1983. Captage de la source du Lez. Etude de
relations entre la source et son réservoir aquifère - rapport n°1 : recueil des données et
établissement d'un modèle de cohérence. BRGM, Montpellier, 95 pp.
Berthet, L., 2010. Prévision des crues au pas de temps horaire : pour une meilleure
assimilation de l’information de débit dans un modèle hydrologique, Institut des Sciences et
de l’Industrie du Vivant et de l’Environnement (AgroParisTech), 603 pp.
Berthet, L., Andréassian, V., Perrin, C. and Javelle, P., 2009. How crucial is it to account
for the antecedent moisture conditions in flood forecasting ? comparison of event-based and
continuous approaches on 178 catchments. Hydrology and Earth System Sciences, 13(6):
819-831.
Bessière, H., Roux, H. and Dartus, D., 2007. Data assimilation and distributed flash flood
modeling, Second Space of Hydrology Workshop, Surface Water Storage and Runoff:
Modeling, In-situ data and Remote Sensin.
Beven , K.J. and Kirkby, M.J., 1979.A physically based variable contributing area model
of basin hydrology. Hydrol. Sci. Bull., 24(1), 43-69.
Beven, K.J. and Binley, A.M., 1992. The future of distributed models: Model calibration
and uncertainty prediction. Hydrological Processes, 6: 279-298.
Blöschl, G., Reszler, C. and Komma, J., 2008. A spatially distributed flash flood
forecasting model. Environmental Modelling and Software, 23: 464-478.
Blöschl, G. and Sivapalan, M., 1995. Scale issues in hydrological modelling: a review.
Hydrological Processes, 9: 251-290.
REFERENCES BIBLIOGRAPHIQUES
- 219 -
Bonacci, O., Ljubenkov, I. and Roje-Bonacci, T., 2006. Karst flash floods : an example
from the Dinaric karst (Croatia). Natural Hazards and Earth System Sciences, 6: 195-203.
Borga, M., 2002. Accuracy of radar rainfall estimates for streamflow simulation. Journal
of Hydrology, 267: 26-39.
Borga, M. and Gaume, E., 2009. Hydrological processes and flash flood generation: new
observations and concepts, 32th IARH congress, Venice.
Borrell-Estupina, V., 2004. Vers une modélisation hydrologique adaptée à la prévision
opérationnelle des crues éclair. Application à de petits bassins versants du sud de la France,
Institut National Polytechnique de Toulouse, Toulouse, 254 pp.
Borrell-Estupina, V., Chorda, J. and Dartus, D., 2005. Prévision des crues éclair. Comptes
Rendus Geosciences, 337: 1109-1119.
Botton, R., 1984. Etude de certaines modalités du fonctionnement de l’aquifère karstique
(zone d’infiltration et zone saturée) sur deux champs de forages nord-montpelliérains,
Université des sciences et techniques du Languedoc, 338 pp.
Boudevillain, B., 2003. Contribution à la définition des caractéristiques d’un radar
hydrologique urbain. Prévision de la pluie à très courte échéance, Université Blaise Pascal,
Nantes, 151 pp.
Boudevillain, B. et al., 2009. Cyclogenèses et précipitations intenses en Méditerranée. La
Météorologie, 8e série: 18-28.
Bourrel, L., Sauvageot, H., Vidal, J.J., Dartus, D. and Dupouyet, J.P., 1994. Radar
measurement of precipitation in cold mountainous areas : the Garonne basin. Hydrological
Sciences-Journal-des sciences Hydrologiques, 39: 4.
Bousquet, J.C., 1997. Géologie de la source du Lez. Circuit géologique. BRGM, Ministère
de l’Education Nationale de la Recherche et de la Technologie, 29 pp.
Bouttier, F. and Courtier, P., 1999. Data assimilation concepts and methods.
Meteorological Training Course Lecture Series, 59 pp.
Bouvier, C. et al., 2006. Recent advances in rainfall-runoff modelling: extrapolation to
extreme floods in southern France, 1rst International Workshop on hydrological extremes
AMHY-FRIEND, Cosenza, Italy, 3-4 May 2006, pp. 229-238.
Bouvier, C. and Delclaux, F., 1996. ATHYS : a hydrological environment for spatial
modelling and coupling with a GIS, Proceedings HydroGIS96. IAHS publication.
Boyle, D.P. et al., 2001. Toward improved streamflow forecasts: value of semidistributed
modeling. Water resources research, 37(11): 2749-2759.
Brath, A. and Montanari, A., 2000. The effects of the spatial variability of soil infiltration
capacity in distributed flood modelling. Hydrological Processes, 14: 2779-2794.
Brocca, L., Melone, F. and Moramarco, T., 2008. On the estimation of antecedent wetness
conditions in rainfall-runoff modelling. Hydrological Processes, 22: 629-642.
Brun, J.F., 1989. Le causse de Viols-le-Fort-Cazevieille garrigues languedociennes,
Hérault. Spelunca, 36: 31-38.
Bruxelles, L. and Caubel, A., 1996. Lacs temporaires et circulations de surface sur le
causse de l’Hospitalet du Larzac (12) en 1996: Fonctionnement et implications
géomorphologiques. Bulletin de la Société Languedocienne de Géographie, fasc. 3-4: 253-
288.
REFERENCES BIBLIOGRAPHIQUES
- 220 -
Bubnova, R., Horanyi, A. and Malardel, S., 1993. International Project
ARPEGE/ALADIN. EWGLAM Newsletter: 117-130.
Buis, S., Piacentini, A. and Déclat, D., 2006. A computational framework for assembling
high performance computing applications. Concurrency Computat.: Pract. Exper., 18(2): 247-
262.
Caetano Bicalho, C., 2010. Hydrochemical characterization of transfers in karst aquifers
by natural and anthropogneic tracers. Example of a Mediterranean karst system, the Lez
aquifer (Southern France). Hydrogéologie. Institut des Sciences et de l’Industrie du Vivant et
de l’Environnement (AgroParisTech), 133 pp.
Campolo, M., Soldati, A. and Andreussi, P., 1999. Forecasting river flow rate during low-
flow periods using neural networks. Water resources research, 35(11): 3547-3552.
Carroll, T.R., 1979. A procedure to incorporate snow course data into the National
Weather Service River Forecast System. Proceedings, Modeling of Snow Cover Runoff.
AGU, AMS, Corps of Engineers and NWS, Hanover, New Hampshire, pp. 351-358.
CETE Méditerranée, 2007. Conférence scientifique sur l’estimation du débit centennal du
Lez à Montpellier. Rapport de synthèse, Montpellier, pp. 185.
Chapon, B., 2006. Etude des pluies intenses dans la région Cévennes-Vivarais à l’aide du
radar météorologique. Régionalisation des traitements radar et analyse granulométrique des
pluies au sol, Université Joseph Fourier, Grenoble, 187 pp.
Chapon, B., Delrieu, G., Gosset, M. and Boudevillain, B., 2008. Variability of rain drop
size distribution and its effect on the Z-R relationship : A case study for intense
Mediterranean rainfall. Atmospheric Research, 87: 52-65.
Chemin, J., 1974. Essai d’application d’un modèle mathématique conceptuel au calcul de
bilan hydrique de l’aquifère karstique de la source du Lez (Région Nord de Montpellier),
Université des sciences et techniques du Languedoc, 67 pp.
Chumchean, S., Seed, A. and Sharma, A., 2006. Correcting of real-time radar rainfall bias
using a Kalman filtering approach. Journal of Hydrology, 317: 123-137.
Chvila, B., Sevruk, B. and Ondràs, M., 2005. The wind-induced loss of thunderstorm
precipitation measurements. Atmospheric Research, 77: 29-38.
Clauzon, G., 1982. Le canyon messinien du Rhône : une preuve décisive du « dessicated
deep-basin model » [Hsü, Cita et Ryan, 1973]. Bull. Soc. Géol. France, XXIV(3): 597-610.
Collier, C.G., 2007. Flash flood forecasting: What are the limits of predictability ?
Quarterly Journal of the Royal Meteorological Society, 133: 3-23.
Corral, C., Sempere-Torres, D., Revilla, M. and Berenguer, M., 2000. A Semi-Distributed
Hydrological Model Using Rainfall Estimates by Radar. Application to Mediterranean Basins.
Physics and Chemistry of the Earth (B), 25(10-12): 1133-1136.
Cosandey, C., 1994. Formation des crues « cévenoles » dans des bassins élémentaires du
Mont Lozère. Revue des Sciences de l’eau / Journal of Water Science, 7(4): 377-393.
Cosme, E., 2010. Data assimilation based on estimation theory: Some Fundamentals.
Lecture notes. Université Joseph Fourier, Grenoble, 28 pp.
Coulibaly, P., Anctil, F. and Bobée, B. 2000. Daily reservoir inflow forecasting using
artificial neural networks with stopped training approach. Journal of Hydrology, 230(3-4),
244-257.
REFERENCES BIBLIOGRAPHIQUES
- 221 -
Courtier, P. and Geleyn, J.-F., 1988. A global numerical weather prediction model with
variable resolution : application to the shallow-water equations. Quarterly Journal of the
Royal Meteorological Society, 114(483): 1321-1346.
Darboux, F., Davy, Ph., Gascuel-Odoux, C. and Huang C., 2002. Evolution of soil
roughness and flowpath connectivity in overland flow experiments. Catena, 46(2-3), 125-139.
Da Ros, D. and Borga, M., 1997. Adaptive Use of a Conceptual Model for Real Time
Flood Forecasting. Nording Hydrology, 28(3): 169-188.
Daget, N., 2008. Estimation d’ensemble des paramètres des covariances d’erreur
d’ébauche dans un système d’assimilation variationnelle de données océaniques, Université
Toulouse III - Paul Sabatier, 324 pp.
De Waele, J., Martina, M.L.V., Sanna, L., Cabras, S. and Antonio Cossu, Q., 2010. Flash
flood hydrology in karstic terrain: Flumineddu Canyon, central-east Sardinia.
Geomorphology, 120: 162-173.
Dechemi, N. and Chambaz, H., 1994. La prévision des crues du bassin versant de l’Oued
Dis (Sebaou) par la méthode DPFT. Revue des sciences de l’eau, 7: 331-342.
Descroix, L., Viramontes, D., Estrada, J., Gonzalez Barrios, J.L. and Asseline, J., 2007.
Investigating the spatial and temporal boundaries of Hortonian and Hewlettian runoff in
Northern Mexico. Journal of Hydrology, 346: 144-158.
Dörfliger, N., 2008. Une gestion active des systèmes karstiques, pourquoi ? Exemples et
perspectives, CFH - Colloque Hydrogéologie et karst au travers des travaux de Michel
Lepellier.
Dörfliger, N. et al., 2008. Active water management resources of karstic water catchment:
the example of the Lez spring (Montpellier, South France), 13th World Water Congress 1-4
September, Montpellier (France).
Drogue, C., 1964. Sur l’étude hydrogéologique des principales résurgences de la région
nord-montpelliéraine. CERH, Tome I: 62-121.
Drogue, C. and Grillot, J.C., 1976. Structure géologique et premières observations
piézométriques à la limite du sous-système karstique du Terrieu, IIe Colloque
d’hydrogéologie en pays calcaire, Besançon (France).
Duband, D., Nalbantis, I., Obled, C., Rodriguez, J.Y. and Tourasse, P., 1990. Unit
hydrograph revisited: the first differenced transfer function (FDTF) approach. Hydrology of
Mountainous Areas, 190: 377-389.
Dubois, P., 1964. Les circulations souterraines dans les calcaires de la région de
Montpellier, Bulletin 2-1964. BRGM, Montpellier, 31 pp.
Dunne, T., and R.D. Black. 1970. Partial area contributions to storm runoff in a small
New England watershed. Water Resour. Res. 6: 1296-1311.
Durand, Y. et al., 1993. A meteorological estimation of relevant parameters for snow
schemes used with atmospheric models. Annals of Glaciology, 18(65-71).
Ellison, W.D., 1945. Some effects of raindrops and surface flow on soil erosion and
infiltration. Transactions of the American Geophysical Union, 26(3): 415-430.
Etchevers, P., 2000. Modélisation de la phase continentale du cycle de l’eau à l’échelle
régionale. Impact de la modélisation de la neige sur l’hydrologie du Rhône, Université Paul
Sabatier, Toulouse, 373 pp.
REFERENCES BIBLIOGRAPHIQUES
- 222 -
Evensen, G., 2003. The Ensemble Kalman Filter: theoretical formulation and practical
implementation. Ocean Dynamics, 53: 343-367.
Fleury, P., Ladouche, B., Conroux, Y., Jourde, H. and Dörfliger, N., 2009. Modelling the
hydrologic fonctions of a karst aquifer under active water management - The Lez spring.
Journal of Hydrology, 365: 235-243.
Ford D.C. & Williams P.W., 2007. Karst Hydrogeology and Geomorphology. Chichester,
Wiley: 561 pp.
Fouchier, C., 2010. Développement d’une méthodologie pour la connaissance régionale
des crues, Université de Montpellier 2, 266 pp.
Fouilloux, A. and Piacentini, A., 1999. The PALM Project: MPMD Paradigm for an
Oceanic Data Assimilation Software. Lecture Notes In Computer Science, 1685: 1423-1430.
Fourmigué, P., 2003. Prévision des crues de la Savoureuse à Belfort. Référence: 18434-02
du 19/03/2003, DIREN Rhône Alpes DB-RMC, 215 p.
Fourmigué, P. and Lavabre, J., 2005. Prévision de crues avec le modèle conceptuel pluie-
débit GR3H. Adaptabilité aux incertitudes sur la pluie. Revue des Sciences de l’Eau, 18(1):
87-102.
Franchini, M., Wendling, J., Obled, C. and Todini, E., 1996. Physical interpretation and
sensitivity analysis of the TOPMODEL. Journal of Hydrology, 175: 293-338.
Gaume, E., 2002. Eléments d’analyse sur les crues éclair, Ecole Nationale du Génie Rural
des Eaux et des Forêts, 359 pp.
Gaume, E. et al., 2009. A compilation of data on European flash floods. Journal of
Hydrology, 367: 70-78.
Gaume, E., Livet, M., Desbordes, M. and Villeneuve, J.P., 2004. Hydrological analysis of
the river Aude, France, flash flood on 12 and 13 November 1999. Journal of Hydrology, 286:
135-154.
Gelb, A., 1974. Applied optimal estimation. Cambridge Mass.: MIT Press.
Georgakakos, K.P. and Hudlow, M.D., 1984. Design of national real-time warning
systems with capability for site-specific flash flood forecasts. Bull. Am. Meteorol. Soc, 67:
1233-1239.
Goodrich, D.G. et al., 1994. Runoff simulation sensitivity to remotely sensed initial soil
water content. Water resources research, 30(5): 1393-1405.
Goswami, M., O’Connor, K.M., Bhattarai, K.P. and Shamseldin, A.Y., 2005. Assessing
the performance of eight real-time updating models and procedures for the Brosna River.
Hydrology and Earth System Sciences, 9(4): 394-411.
Gouisset, Y., 1981. Le karst superficiel : genèse, hydrodynamique et caractéristiques
hydrauliques - Application à un karst du Languedoc, Université des sciences et techniques du
Languedoc, Montpellier, 217 pp.
Grayson, R. and Blöschl, G., 2000. Spatial Patterns in Catchment Hydrology. Cambridge
University Press, Cambridge, U.K.
Gresillon, J.M. and Taha, A., 1998. Les zones saturées contributives en climat
méditerranéen : condition d’apparition et influence sur les crues. Hydrological Sciences-
Journal-des Sciences Hydrologiques, 43(2).
REFERENCES BIBLIOGRAPHIQUES
- 223 -
Guilbot, A., 1976. Modélisation des écoulements d’un aquifère karstique (Liaison pluie-
débit). Application aux bassins de Saugras et du Lez, Université des Sciences et Techniques
du Languedoc, Montpellier, 117 pp.
Gupta, H.V., Sorooshian, S. and Yapo, P. O., 1998. Toward improved calibration of
hydrologic models: multiple and noncommensurable measures of information. Water
Ressources Research, 34(4), 751-763.
Guth, J. et al., 2010. Assimilation de données sur un modèle d'ondes de crues. Technical
Report, CERFACS, URA CERFACS/CNRS No1875, France, TR-CMGC-11-23 SUC.
Habets, F. et al. 1999. The ISBA surface scheme in a macroscale hydrological model
applied to the Hapex-Mobilhy area: Part I: Model and database, J. Hydrol., 217, 75–96.
Habets, F. et al., 2008. The SAFRAN-ISBA-MODCOU hydrometeorological model
applied over France. Journal of Geophysical Research, 113: 18.
He, M. et al., 2011. Ensemble-Based Snow Data Assimilation for Improved Operational
Streamflow Predictions. Geophysical Research Abstracts, 13(EGU2011-13087).
Hébrard, O., Voltz, M., Andrieux, P. and Moussa, R., 2006. Spatio-temporal distribution
of soil surface moisture in a heterogeneously farmed Mediterranean catchment. Journal of
Hydrology, 329: 110-121.
Hubert, W., 2003. Dictionnaire français d’hydrologie. Centre national français des
sciences hydrologiques, commission de terminologie.
Huet, P. et al., 2003. Retour d’expériences des crues de septembre 2002 dans les
départements du Gard, de l’Hérault, du Vaucluse, des Bouches du Rhône, de l’Ardèche et de
la Drôme. Inspection générale de l’Environnement, Paris, France, 124 pp.
Javelle, P., Fouchier, C., Arnaud, P. and Lavabre, J., 2010. Flash flood warning at
ungauged locations using radar rainfall and antecedent soil moisture estimations. Journal of
Hydrology, 394: 267-274.
Jazayeri Noushabadi, M.R., 2009. Characterization of relationships between fracture
network and flow-path network in fractured and karstic reservoirs - Numerical modelling and
field investigation (Lez aquifer, Southern France), Université Montpellier 2 Sciences et
techniques du Languedoc, 326 pp.
Joerin, C., Beven, K.J., Musy, A. and Talamba, D., 2005. Study of hydrological processes
by the combination of environmental tracing and hill slope measurements : application on the
Haute-Mentue catchment. Hydrological Processes, 19: 3127-3145.
Jourde, H. et al., 2011. The MEDYCYSS observatory, a multi scale observatory of flood
dynamics and hydrodynamics in karst (Mediterranean border Southern France), 9th
International Hydrogeological Congress of Greece, Kalavrita (Greece).
Jourde, H., Roesch, A., Guinot, V. and Bailly-Comte, V., 2007. Dynamics and
contribution of karst groundwater to surface flow during Mediterranean flood. Environ. Geol.,
51: 725-730.
Jukic, D. and Denic-Jukic, V., 2009. Groundwater balance estimation in karst by using a
conceptual rainfall-runoff model. Journal of Hydrology, 373: 302-315.
Kahl, B. and Nachtnebel, H.P., 2008. Online updating procedures for a real-time
hydrological forecasting system. IOP Publishing, XXIVth Conference of the Danubian
Countries, Earth and Environmental Science, 4: 012001.
REFERENCES BIBLIOGRAPHIQUES
- 224 -
Karam, Y., 1989. Essais de modélisation des écoulements dans un aquifère karstique.
Exemple de la source du Lez (Hérault, France), Université des sciences et techniques du
Languedoc, Montpellier, 286 pp.
Kienzler, P.M. and Naef, F., 2008. Subsurface storm flow formation at different hillslopes
and implications for the “old water paradox”. Hydrological Processes, 22: 104-116.
Kirstetter, P.E., 2008. Estimation quantitative des précipitations par radar météorologique
: inférence de la structure verticale des pluies, modélisation des erreurs radar-pluviomètres,
Université Joseph Fourier, Grenoble, 276 pp.
Kite, G.W. and Kouwen, N., 1992. Watershed modeling using land classifications. Water
Resources Research, 28(12): 3193-3200.
Klimchouk, A., Jones, W.K., Culver, D.C. and Herman, J., 2004. Towards defining,
delimiting and classifying epikarst: Its origin, processes and variants of exomorphique
evolution. Karst Water Institute special publication, 9: 23-35.
Kong A Siou, L., 2011. Modélisation des crues de bassins karstiques par réseaux de
neurones. Cas du bassin du Lez, Université Montpellier 2 Sciences et techniques du
Languedoc, Montpellier, 228 pp.
Lafare, A., 2007. Etude du comportement hydrodynamique de l’aquifère karstique de la
source du Lez lors d’événements pluviométriques exceptionnels par une approche
hydrologique, hydrogéologique et hydrochimique. Rapport de stage de Master 2,
Hydrosciences, Montpellier, 88 pp.
Lagarde, T., 2000. Nouvelle approche des méthodes d’assimilation de données: les
algorithmes de point selle, Université Paul Sabatier, Toulouse, 246 pp.
Lagarde, T., Piacentini, A. and Thual, O., 2001. A new representation of data assimilation
methods: the PALM flow charting approach. Q. J. R. M. S., 127: 189-207.
Lavabre, J., Sempere-Torres, D. and Cernesson, F., 1991. Etude du comportement
hydrologique d’un petit bassin versant méditerranéen après la destruction de l’écosystème
forestier par un incendie.
Le Lay, M., 2006. Modélisation Hydrologique dans un contexte de variabilité Hydro-
Climatique. Une approche comparative pour l’étude du cycle hydrologique à méso-échelle au
Bénin, Institut National Polytechnique de Grenoble, Grenoble, 251 pp.
Le Masne, D., 1979. Application des méthodes géophysiques et électromagnétiques à
l’étude des milieux fissurés, Faculté de sciences de Montpellier, Science de la Terre, Géologie
appliquée.
Le Moine, N., 2008. Le bassin versant de surface vu par le souterrain : une voie
d’amélioration des performances et du réalisme des modèles pluie-débit ?, Université Pierre et
Marie Curie, 324 pp.
Le Moine, N., Andréassian, V. and Mathevet, T., 2008. Confronting surface and
groundwater balances on the La Rochefoucauld-Touvre karstic system (Charente, France).
Water Resources Research, 44(W03403): 1-10.
Ledoux, E., Girard, G. and Villeneuve, J.P., 1984. Proposition d’un modèle couplé pour la
simulation conjointe des écoulements de surface et des écoulements souterrains sur un bassin
hydrologique. La Houille Blanche, 1/2: 101-120.
REFERENCES BIBLIOGRAPHIQUES
- 225 -
Lefrou, C. et al., 2000. Les crues des 11, 12 et 13 novembre 1999, dans les départements
de l’Aude, l’Hérault, les Pyrénées Orientales et du Tarn. Inspection générale de
l’Environnement, Paris, France, 140 pp.
Lhomme, J., Bouvier, C. and Perrin, J.L., 2004. Applying a GIS-based geomorphological
routing model in urban catchment. Journal of Hydrology, 299: 203-216.
Lischeid, G., Kolb, A. and Alewell, C., 2002. Apparent translatory flow in groundwater
recharge and runoff generation. Journal of Hydrology, 265: 195-211.
Loumagne, C. et al., 2001. Integration of remote sensing data into hydrological models for
reservoir management. Hydrological Sciences Journal, 46(1): 89-102.
MacLaughlin, D., 2002. An integrated approach to hydrologic data assimilation:
interpolation, smoothing, and filtering. Advances in Water Resources, 25: 1275-1286.
Madsen, H., 2000. Automatic calibration of a conceptual rainfall-runoff model using
multiple objectives. Journal of Hydrology, 235: 276-288.
Madsen, H., Butts, M.B., Khu, S.T. and Liong, S.Y., 2000. Data assimilation in rainfall-
runoff forecasting, Proceedings of Hydroinformatics 2000, 4th Conference on
Hydroinformatics, Cedar Rapids, Iowa, USA.
Maidment, D.R., 1992. Handbook of Hydrology, ISBN 0-07-039732-5. David R.
Maidment, editor in chief, McGraw-Hill.
Maier, H.R. and Dandy, G.C., 2000. Neural networks for the prediction and forecasting of
water resources variables: a review of modelling issues and applications. Environmental
Modelling and Software, 15(1): 101-124.
Mangin, A., 1975. Contribution à l'étude hydrodynamique des aquifères karstiques,
Université de Dijon, 124 pp.
Mantovan, P. and Todini, E., 2006. Hydrological forecasting uncertainty assessment:
Incoherence of the GLUE methodology. Journal of Hydrology, 330: 368-381.
Mapiam, P.P., Sharma, A., Chumchean, S. and Sriwongsitanon, N., 2009. Runoff
estimation using radar and rain gage data, 18th World IMACS/MODSIM Congress.
Marchandise, A., 2007. Modélisation hydrologique distribuée sur le Gardon d’Anduze :
étude comparative de différents modèles pluie-débit, extrapolation de la normale à l’extrême
et tests d’hypothèses sur les processus hydrologiques, Université Montpellier 2, Montpellier,
214 pp.
Marchandise, A. and Viel, C., 2009. Utilisation des indices d’humidité de la chaîne
Safran-Isba-Modcou de Météo-France pour la vigilance et la prévision opérationnelle des
crues. La Houille Blanche, 6: 35-41.
Marchi, L., Borga, M., Preciso, E. and Gaume, E., 2010. Characterisation of selected
extreme flash floods in Europe and implications for flood risk management. Journal of
Hydrology, 394: 118-133.
Maréchal, J.C., Ladouche, B. and Dörfliger, N., 2008. Karst flash flooding in a
Mediterranean karst, the example of Fontaine de Nîmes. Engineering Geology, 99: 138-146.
Maréchal, J.C., Ladouche, B. and Dörfliger, N., 2009. Analyse hydrogéologique de la
contribution de l’eau souterraine à la crue éclair des 6 et 8 septembre 2005 à Nîmes. La
Houille Blanche, 2: 88-93.
REFERENCES BIBLIOGRAPHIQUES
- 226 -
Marjolet, G. and Salado, J., 1975. Contribution à l’étude de l’aquifère karstique de la
source du Lez (Hérault) - Etude des écoulements d’eau dans les calcaires fissurés et karstifiés
du site du futur captage des eaux de la source du Lez, tome IX, fasc. III. CERGA,
Montpellier, 139 pp.
Marsaud, B., 1996. Structure et fonctionnement de la zone noyée des karsts à partir des
résultats expérimentaux, Université Paris XI Orsay, 301 pp.
Marshall, J. and Palmer, W.M.K., 1948. The distributions of raindrops with size. J.
Meteor., 5: 165-166.
Massart, S., 2003. Méthodologies de l’assimilation de données. Application à la chimie
atmosphérique et à la mécanique des structures, CERFACS Toulouse, 270 pp.
Meunier, M., 1996. Couvert forestier et crues sur les petits basins versants de montagne.
Unasylva, 185: 1-16.
Meyles, E., Williams, A., Ternan, L. and Dowd, J., 2003. Runoff generation in relation to
soil moisture patterns in a small Dartmoor catchment, Southwest England. Hydrological
Processes, 17: 251-264.
Michaud, J. and Sorooshian, S., 1994. Comparison of simple versus complex distributed
runoff on a midsized semiarid watershed. Water Resources Research, 30(3): 593-605.
Michel, C., Andréassian, V. and C., P., 2005. Soil Conservation Service Curve Number
method: How to mend a wrong soil accounting procedure ? Water Resources Research,
41(W02011): doi:10.1029/2004WR003191.
Mocochain, L., Clauzon, G., Bigot, J.-Y., Brunet, P., 2006. Geodynamic evolution of peri-
Mediterranean karst during the Messinian and the Pliocene: evidence from the Ardèche and
Rhône valleysystems canyon, Southern France. Sedimentary Geology, 188-189, 219-233.
Moore, R.J., Bell, V.A. and Jones, D.A., 2005. Forecasting for flood warning. Comptes
Rendus Geosciences, 337: 203-217.
Morel, S., 2003. Modélisation à l’échelle régionale des bilans énergétique et hydrique de
surface et des débits ; application au bassin Adour-Garonne, Université Paul Sabatier,
Toulouse.
Moulin, L., 2007. Prévision des crues rapides avec des modèles hydrologiques globaux.
Application aux bassins opérationnels de la Loire supérieure : évaluation des modélisations,
prise en compte des incertitudes sur les précipitations moyennes spatiales et utilisation des
prévisions météorologiques, Ecole Nationale du Génie Rural, des Eaux et des Forêts
(AgroParisTech), 639 pp.
Musy, A. and Higy, C., 2004. Hydrologie : Tome 1, Une science de la nature. Presses
Polytechniques et Universitaires Romandes (PPUR), 314 pp.
Nalbantis, I., 1995. Use of multiple-time-step information in rainfall-runoff modelling.
Journal of Hydrology, 165: 135-159.
Nelly, J.-B., Dorée, C., Sau, J. and Malaterre, P.-O., 2010. Data assimilation for the real-
time update of a 1D hydrodynamic model, fault detection - application to the automatic
control of hydropower plants on the Rhône river, SinHydro 2010: Hydraulic modeling and
uncertainty, 2-4 June 2010, Sophia Antipolis.
Noilhan, J. and Planton, S., 1989. A Simple Parameterization of Land Surface Processes
for Meteorological Models. Monthly Weather Review, 117: 536-549.
REFERENCES BIBLIOGRAPHIQUES
- 227 -
Noilhan, J. and Mahfouf, J.-F., 1996. The ISBA land surface parameterisation scheme.
Global and Planetary Change, 13: 145-159.
Obled, C., Bontron, G. and Garçon, R., 2002. Quantitative prediction forecast : a
statistical adaptation of model outputs through an analogues sorting approach. Atmospheric
Research, 63: 303-324.
Onyando, J.O., Schumann, A.H. and Schultz, G.A., 2003. Simulation of flood
hydrographs based on lumped and semi-distributed models for two tropical catchments in
Kenya. Hydrological Sciences Journal, 48(4): 511-524.
Paloc, H., 1979. Alimentation en eau de la ville de Montpellier captage de la source du
Lez commune de Saint Clément (Hérault) Prélèvement d’un débit supplémentaire de 1 600
L/s. Rapport géologique sur la délimitation et la réglementation des périmètres de protection
du captage, 13 pp.
Peck, E.L., Johnson, E.R., Krouse, K.M., Carroll, T.R. and Schaake, J.C., 1980.
Hydrological update techniques used by the US National Weather Service. Proceedings of the
Oxford Symposium, IAHS-AISH Publ., 129: 419-424.
Pellarin, T., Calvet, J.C. and Wagner, W., 2006. Evaluation of ERS Scatterometer soil
moisture products over a half-degree region in Southwestern France. Geophysical Research
Letters, 33: L17401.
Perrin, C., 2000. Vers une amélioration d’un modèle global pluie-débit au trvers d’une
approche comparative, Institut National Polytechnique de Grenoble, 287 pp.
Peugeot, C., Cappelaere, B., Vieux, B.E., Séguis, L. and Maia, A., 2003. Hydrologic
process similation of a semiarid, endoreic catchment in Sahelian West Niger. 1. Model-aided
data analysis and screening. Journal of Hydrology, 279: 224-243.
Quesney, A. et al., 2000. Estimation of watershed soil moisture index from ERS/SAR
data. Remote Sens. Environ., 72(3): 290-303.
Quintana Segui, P. et al., 2008. Analysis of near surface atmospheric variables :
Validation of the SAFRAN analysis over France. Journal of Applied Meteorology and
Climatology, 47: 92-107.
Refsgaard, J.C., 1997. Validation and Intercomparison of Different Updating Procedures
for Real-Time Forecasting. Nordic Hydrology, 28: 65-84.
Refsgaard, J.C. and Knudsen, J., 1996. Operational Validation and Intercomparison of
Different Types Hydrological Models. Water Resources Research, 32(7): 2189-2202.
Reichle, R.H., 2008. Data assimilation methods in the Earth sciences. Advances in Water
Resources, 31: 1411-1418.
Ricci, S., 2004. Assimilation variationnelle océanique: modélisation multivariée de la
matrice de covariance d’erreur d’ébauche, Université Paul Sabatier Toulouse III, 276 pp.
Ricci, S., Piacentini, A., Thual, O., Le Pape, E. and Jonville, G., 2011. Correction of
upstream flow with data assimilation in the context of flood forecasting. Submitted in Hydrol.
Earth Syst. Sci.
Rivrain, J., 1997. Les épisodes orageux à précipitations extrêmes sur les régions
Méditerranéennes de la France. Phénomènes remarquables N°4.
REFERENCES BIBLIOGRAPHIQUES
- 228 -
Roesch, A. and Jourde, H., 2006. Incidence d’une gestion active de la ressource en eau en
milieu karstique sur le risque hydrologique. Exemple du fleuve Lez (Montpellier, France),
GIRE3D Conference, Marrakech, pp. 8.
Romain, F., 2010. La construction contemporaine des paysages fluviaux urbains, le cas de
deux villes nord méditerranéennes : Perpignan et Montpellier, Science et Architecture du
Paysage. Institut des Sciences et de l’Industrie du Vivant et de l’Environnement
(AgroParisTech), 310 pp.
Rousset-Regimbeau, F., 2007. Modélisation des bilans de surface et des débits sur la
France, application à la prévision d’ensemble des débits, Université Paul Sabatier, Toulouse,
233 pp.
Rousset, F., et al. 2004. Hydrometeorological modeling of the Seine basin using the
SAFRAN-ISBA-MODCOU system, J. Geophys. Res., 109, D14105,
doi:14110.11029/12003JD004403.
Roux, J.C., 2006. Aquifères et eaux souterraines en France. BRGM (Editions).
Ruelland, D., Guinot, V., Levavasseur, F. and Cappelaere, B., 2009. Modelling the long-
term impact of climate change on rainfall-runoff processes over a large Sudano-Sahelian
catchment. IAHS Publ., 333: 59-68.
Sahoo, G.B., Ray, C. and Carlo, E.H.D., 2006. Use of neural network to predict flash
flood and attendant water qualities of a mountainous stream on Oahu, Hawaii. Journal of
Hydrology, 327: 525-538.
Salles, C., Cres, F.N., Tournoud, M.G. and Ibrahim, H., 2010. Assessment of rainfall
fields in a small Mediterranean basin: radar versus rain gauge data. ERAD 2010, The sixth
European Conference on radar in meteorology and hydrology.
Sangati, M., Borga, M., Rabuffetti, D. and Bechini, R., 2009. Influence of rainfall and soil
properties spatial aggregation on extreme flash flood response modelling: An evaluation
based on the Sesia river basin, North Western Italy. Advances in Water Resources, 32: 1090-
1106.
Seity, Y. et al., 2011. The AROME-France convective scale operational model. Mon.
Weather Rev., 139: 976-991.
Seo, D.J., Koren, V. and Cajina, N., 2003. Real-Time Variational Assimilation of
Hydrologic and Hydrometeorological Data into Operational Hydrologic Forecasting. Journal
of Hydrometeorology, 4: 627-641.
Sittner, W.T. and Krouse, K.M., 1979. Improvement of hydrologic simulation by utilizing
observed discharge as an indirect input Computed Hydrograph Adjustment Technique
(CHAT), HYDRO-38, Silver Spring, MD. NOAA Tech. Memo. , 125 pp.
Smith P. L., 1998. On the minimum useful elevation angle for weather surveillance radar
scans. Journal Of Atmospheric and Oceanic Technology: 841-843.
Talagrand, O., 1997. Assimilation of observation, an introduction. J. Meteorol. Soc. Jpn.,
75(1B): 191-209.
Tangara, M., 2005. Nouvelle méthode de prévision de crue utilisant un modèle pluie-débit
global, Ecole pratique des hautes études de Paris, CEMAGREF, 374 pp.
Thiery, D. et Bérard, P., 1984. Alimnetation en eau de la ville de Montpellier. Captage de
la source du Lez étude des relations entre la source et son aquifère. Rapport n°3 : modèle
d’étude détaillé. BRGM Montpellier.
REFERENCES BIBLIOGRAPHIQUES
- 229 -
Thirel, G., 2010. Amélioration des prévisions d’ensemble des débits sur la France de
SAFRAN-ISBA-MODCOU, Université Paul Sabatier Toulouse III, 252 pp.
Thirel, G. et al., 2010. A past discharges assimilation system for ensemble streamflow
forecasts over France – Part 1 : Description and validation of the assimilation system. Hydrol.
Earth Syst. Sci., 14: 1623-1637.
Toukourou, M.S., Johannet, A. and Dreyfus, G., 2009. Flash Flood Forecasting by
Statistical Leaming in the Absence of Rainfall Forecast: A Case Study. Engineering
Applications of Neural Networks: 98-107.
Tramblay, Y., Bouvier, C., Ayral, P.A. and Marchandise, A., 2011. Impact of rainfall
spatial distribution on rainfall-runoff modelling efficiency and initial soil moisture conditions
estimation. Natural Hazards and Earth System Sciences, 11: 1-14.
Tramblay, Y. et al., 2010. Assessment of initial soil moisture conditions for event-based
rainfall-runoff modelling. Journal of Hydrology, 387: 176-187.
UNESCO-OMM, 1992. Glossaire international d'hydrologie. Deuxième édition
quadrilingue (EN, ES, FR, RU). UNESCO, 413 pp.
Vieux, B.E. and Bedient, P.B., 2004. Assessing urban hydrologic prediction accuracy
through event reconstitution. Journal of Hydrology, 299: 217-236.
Vivoni, E.R., Entekhabi, D., Bras, R.L. and Ivanov, V.Y., 2007. Controls on runoff
generation and scale-dependence in a distributed hydrologic model. Hydrology and Earth
System Sciences Discussions, 4: 983-1029.
Weisse, A., Oudin, L. and Loumagne, C., 2003. Assimilation de données d’humidité des
sols pour la prévision de crues: comparaison d’un modèle pluie-débit conceptuel et d’un
modèle intégrant une interface sol-végétation-atmosphère. Revue des Sciences de l’Eau,
16(2): 173-197.
Wenninger, J., Uhlenbrook, S., Lorentz, S. and Leibungut, C., 2008. Identification of
runoff generation processes using combined hydrometric, tracer and geophysical methods in a
headwater catchment in South Africa. Hydrological Sciences Journal, 53(1): 65-80.
White, W.B., 2002. Karst hydrology: recent developments and open questions.
Engineering Geology, 65: 85-105.
Williams, P.W., 2008. The role of the epikarst in karst and cave hydrogeology: a review.
International Journal of Speleology, 37(1): 1-10.
Wöhling, T., Lennartz, F. and Zappa, M., 2006. Technical Note: Updating procedure for
flood forecasting with conceptual HBV-type models. Hydrology and Earth System Sciences,
10: 783-788.
Xiong, L. and O’Connor, K.M., 2002. Comparing of four updating models for real-time
river flow forecasting. Hydrological Sciences Journal, 47(4): 621-639.
Yang, X. and Michel, C., 2000. Flood forecasting with a watershed model: a new method
of parameter updating. Hydrological Sciences Journal, 45(4): 537-546.
Zehe, E. and Blöschl, G., 2004. Predictability of hydrologic response at the plot and
catchment scales: Role of initial conditions. Water Resources Research, 40(W10202): 1-21.

REFERENCES BIBLIOGRAPHIQUES
- 230 -





























