Embed Size (px)
Citation preview
Rapport d’avancement Post-Doctoral n°1
CNESIRCOM
Agilent NMDG
ETUDE PRELIMINAIRE POUR LA MISE ENPLACE D’UN SYSTEME DE MESURE DE
FORMES D’ONDES TEMPORELLESMULTIHARMONIQUE AU MOYEN DE SONDES
« HAUTE-IMPEDANCE »
Tibault Reveyrand
Novembre 2002

2
3
SOMMAIRE
SOMMAIRE ................................................................................................................ 3
INTRODUCTION ........................................................................................................ 5
LE LSNA..................................................................................................................... 6
Systèmes de mesures de formes d’ondes temporelles..........................................................6L’oscilloscope à échantillonnage........................................................................................6Le MTA : Microwave Transition Analyser .........................................................................7Le LSNA : Large Signal Network Analyser........................................................................7Système conçu autours d’un ARV modifié.........................................................................8
Présentation et principe du LSNA.......................................................................................8Aspect matériel...................................................................................................................8Structure logicielle .............................................................................................................9Architecture simplifiée du LSNA .....................................................................................11Principe de l’échantillonnage harmonique (DownConverter Box).....................................11Le générateur de référence (HPR).....................................................................................13Principe de Calibration du LSNA .....................................................................................14Evolutions du LSNA ........................................................................................................15
Utilisation pragmatique du LSNA .....................................................................................15Etalonnage........................................................................................................................15Mesures............................................................................................................................17
PROBLEMATIQUE LIEE A LA MESURE DE FORMES D’ONDES TEMPORELLESA L’AIDE DE SONDES « HAUTE IMPEDANCE » ................................................... 19
Formalismes théoriques.....................................................................................................19Matrices [S] et [T] ............................................................................................................19Les pseudo-ondes.............................................................................................................20
Mesurer à l’aide de sondes haute-impédance....................................................................21Principe de mesure...........................................................................................................21Banc de mesure autour d’un MTA ....................................................................................22Banc de mesure autour d’un oscilloscope à échantillonnage..............................................23Banc de mesure envisagé autour du LSNA .......................................................................25
Etalonnage des sondes haute-impédances.........................................................................26
4
Méthode classique par « de-embedding »..........................................................................26Méthode améliorée : étalonnage dans le plan coaxial (SOLT)...........................................27Méthode améliorée : étalonnage dans le plan des sondes (LRRM) ....................................28Méthode supplémentaire envisagée avec le LSNA............................................................29
CARACTERISATION DES LIGNES DE PROPAGATIONS..................................... 31
Formalisme théorique utilisé : la transformation d’ impédance par matrices [T]. ..........31Définition de la matrice [Qnm]...........................................................................................31Propriétés.........................................................................................................................32Cas particulier utile...........................................................................................................33
Caractériser une ligne par sa matrice [S] ..........................................................................33
Détermination de la constante de propagation γγγγ ...............................................................35Formalisme par paramètres [S] .........................................................................................35Formalisme par lignes multiples (MTRL).........................................................................37Conclusion .......................................................................................................................38
Détermination de l’ impédance caractéristique Z0.............................................................38Formalisme par paramètres [S] .........................................................................................39Hypothèse d’une ligne à faibles pertes (substrat GaAs).....................................................39Lignes à pertes (substrat Si)..............................................................................................41Lignes Multi-modes..........................................................................................................41
CONCLUSION.......................................................................................................... 42
BIBLIOGRAPHIE...................................................................................................... 43

5
INTRODUCTION
La mesure de formes d’ondes temporelles au cœur même d’un circuit MMIC est unaspect particulièrement intéressant pour comprendre et analyser les aspects fiabilité destransistors de puissance. Elle permet, en outre, des comparaisons avec des dispositifs simulésen équilibrage harmonique à des accès particuliers qui ne sont pas traditionnellementmesurables. La mise en place d’un système permettant ce type de mesure est le sujet de cerapport.
Le système de mesure doté de sondes « haute-impédance », permettant un accès auxlignes internes d’un MMIC, sera conçu autour d’un appareil de mesure de forme d’ondetemporelle. L’appareil choisie est le « Large Signal Network Analyser » (LSNA) conçu parAgilent NMDG (Network and Measurements Description Group). Les raisons de ce choixainsi que des descriptions élémentaires du système LSNA constituerons la première partie dece rapport.
La seconde partie traitera du principe de mesure et de la mise en place du couplage avecle LSNA, des sondes « haute-impédance ». Deux aspects seront traité : la mesure proprementdite, afin de déduire les ondes circulant dans la ligne sondée et l’étalonnage des sondes. Lessolutions envisagées ainsi que les procédés équivalents présents dans la littérature serontcommentés.
Enfin une troisième partie portera sur la caractérisation de ligne de transmission. Eneffet, une déduction des ondes (expliquée dans la seconde partie) ne peut se faire sans laconnaissance précise de la constante de propagation et de l’ impédance caractéristique de laligne mesurée.

6
LE LSNA
De nombreux systèmes permettant la mesures de formes d’ondes temporelles existent ouon étés l’œuvre de travaux antérieurs. Une présentation de différents systèmes de mesure estproposée dans ce chapitre. Parmi eux, le LSNA (Large Signal Network Analyser) s’ impose,de part sa structure, comme l’élément essentiel et central du banc de mesure que nousdésirons mettre en place. Ce chapitre propose ainsi une description élémentaire et un exemplepratique de mesures réalisées avec le système développé par Agilent NMDG.
Systèmes de mesures de formes d’ondes temporelles
Le noyau central du banc de mesure à établir doit être un système permettant la mesurede formes d’ondes temporelles aux accès d’un dispositif non-linéaire. Pour nos travaux, nousne considérerons, dans un premier temps, que des formes d’ondes correspondant à dessignaux de type monoporteuse. L’utilisation des mesures faites avec des pointes « haute-impédances » se fera dans le domaine de la « fiabilité » implicitement lié à un aspect« circuit ». Dès lors, une connaissance de la porteuse mais également de ses harmoniques estnécessaire. Cette condition rend les systèmes de mesure d’enveloppes au fondamental [28]inadaptés pour l’utilisation désirée. On doit donc pouvoir réaliser des mesures de formed’ondes temporelles multi-harmoniques.
Les principaux systèmes permettant la mesure de formes d’onde temporelles multi-harmoniques sont : l’oscilloscope à échantillonnage ; l’analyseur de transition micro-onde(MTA : Microwave Transition Analyser) ; l’analyseur de réseaux non linéaire (NNMS :Nonlinear Network Measurement System, récemment renommé LSNA) et un système basésur l’emploi d’un analyseur de réseau vectoriel modifié.
L’oscilloscope à échantillonnage
L’oscilloscope à échantillonnage semblerait une solution intéressante à première vue,d’autant plus qu’une procédure d’étalonnage (le nose to nose) permet de caractériser laréponse impulsionelle de l’appareil en amplitude et en phase [29]. Des expériences ont mêmeété réalisées par le NIST (National Institute of Standards and Technology) avec des sondeshaute-impédances au moyen d’un oscilloscope à échantillonnage [5]. Cependant, desprécautions doivent être prises concernant la base de temps des oscilloscopes qui est déformée[30] et à l’utilisation d’une entrée TRIGGER (typique des oscilloscopes) accréditant lesystème de mesure d’un manque de stabilité.Si des solutions peuvent être apportées pour la correction des ondes enregistrées parl’oscilloscope à échantillonnage, il reste un défaut majeur à cet appareil : le tempsd’acquisition des formes d’ondes temporelles.
7
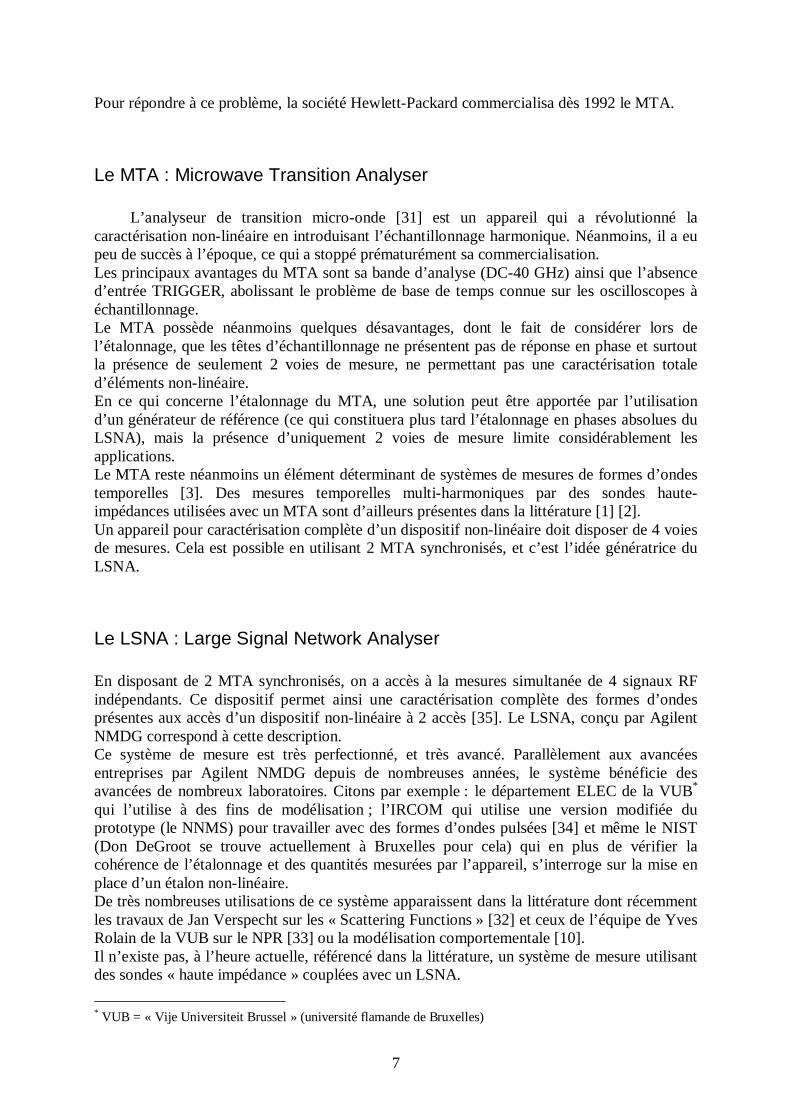
Pour répondre à ce problème, la société Hewlett-Packard commercialisa dès 1992 le MTA.
Le MTA : Microwave Transition Analyser
L’analyseur de transition micro-onde [31] est un appareil qui a révolutionné lacaractérisation non-linéaire en introduisant l’échantillonnage harmonique. Néanmoins, il a eupeu de succès à l’époque, ce qui a stoppé prématurément sa commercialisation.Les principaux avantages du MTA sont sa bande d’analyse (DC-40 GHz) ainsi que l’absenced’entrée TRIGGER, abolissant le problème de base de temps connue sur les oscilloscopes àéchantillonnage.Le MTA possède néanmoins quelques désavantages, dont le fait de considérer lors del’étalonnage, que les têtes d’échantillonnage ne présentent pas de réponse en phase et surtoutla présence de seulement 2 voies de mesure, ne permettant pas une caractérisation totaled’éléments non-linéaire.En ce qui concerne l’étalonnage du MTA, une solution peut être apportée par l’utilisationd’un générateur de référence (ce qui constituera plus tard l’étalonnage en phases absolues duLSNA), mais la présence d’uniquement 2 voies de mesure limite considérablement lesapplications.Le MTA reste néanmoins un élément déterminant de systèmes de mesures de formes d’ondestemporelles [3]. Des mesures temporelles multi-harmoniques par des sondes haute-impédances utilisées avec un MTA sont d’ailleurs présentes dans la littérature [1] [2].Un appareil pour caractérisation complète d’un dispositif non-linéaire doit disposer de 4 voiesde mesures. Cela est possible en utilisant 2 MTA synchronisés, et c’est l’ idée génératrice duLSNA.
Le LSNA : Large Signal Network Analyser
En disposant de 2 MTA synchronisés, on a accès à la mesures simultanée de 4 signaux RFindépendants. Ce dispositif permet ainsi une caractérisation complète des formes d’ondesprésentes aux accès d’un dispositif non-linéaire à 2 accès [35]. Le LSNA, conçu par AgilentNMDG correspond à cette description.Ce système de mesure est très perfectionné, et très avancé. Parallèlement aux avancéesentreprises par Agilent NMDG depuis de nombreuses années, le système bénéficie desavancées de nombreux laboratoires. Citons par exemple : le département ELEC de la VUB*
qui l’utilise à des fins de modélisation ; l’ IRCOM qui utilise une version modifiée duprototype (le NNMS) pour travailler avec des formes d’ondes pulsées [34] et même le NIST(Don DeGroot se trouve actuellement à Bruxelles pour cela) qui en plus de vérifier lacohérence de l’étalonnage et des quantités mesurées par l’appareil, s’ interroge sur la mise enplace d’un étalon non-linéaire.De très nombreuses utilisations de ce système apparaissent dans la littérature dont récemmentles travaux de Jan Verspecht sur les « Scattering Functions » [32] et ceux de l’équipe de YvesRolain de la VUB sur le NPR [33] ou la modélisation comportementale [10].I l n’existe pas, à l’heure actuelle, référencé dans la littérature, un système de mesure utilisantdes sondes « haute impédance » couplées avec un LSNA.
* VUB = « Vije Universiteit Brussel » (université flamande de Bruxelles)

8
Système conçu autours d’un ARV modifié
Un système de mesure basé sur l’utilisation d’un analyseur de réseau vectoriel modifié, pourdes résultats analogues à ceux du LSNA a été développé à l’ IRCOM il y a quelques années eta fait l’objet des travaux de thèse de Denis Barataud [11]. Le but fut d’accéder aux formesd’ondes temporelles multiharmoniques à moindre coup (d’où l’utilisation d’un ARVclassique). L’ idée est astucieuse mais aboutie à un système complexe issu de la recherche, parcomparaison au LSNA qui est un appareil commercial, et donc « près à l’emploi ».L’ idée consistait alors d’utiliser les 4 voies de mesures internes à l’ARV d’une façonparticulière. En effet une des voies réceptionnait le signal d’un générateur étalon (que l’onretrouve dans le LSNA, mais UNIQUEMENT pour la phase d’étalonnage). Ce générateurétalon fournissait un signal parfaitement connu (car mesuré avec un oscilloscope àéchantillonnage étalonné en nose-to-nose). Les 3 autres voies réceptionnaient les ondesincidentes et réfléchies présentes aux accès du dispositif sous test. 3 voies pour 4 formesd’ondes impliquait donc l’utilisation d’un « switch » sur l’une des voies. L’analyseur deréseau mesurant qu’un rapport d’ondes, les mesures correspondaient au rapport entre uneonde issue du dispositif sous test et celle issue du générateur de référence. L’onde dugénérateur étant parfaitement connue, on a donc accès à la véritable onde mesurée du DST.Ce système de mesure est principalement un outils de recherche, et a connu moins d’avancéestechniques depuis sa conception que ne peut en connaître un système voué à lacommercialisation tel que le LSNA. De plus, Agilent NMDG mettant à disposition unsystème LSNA complet ainsi que leurs connaissances scientifiques au profit du sujet post-doctoral en cours, conduit à un choix implicite du LSNA comme système de mesure au cœurdes expériences à mettre en place.
Présentation et principe du LSNA
Cette partie propose de présenter le LSNA de façon simple et générale. Une descriptiondétaillée sur système peut être obtenue dans [10] et [11].
Aspect matériel
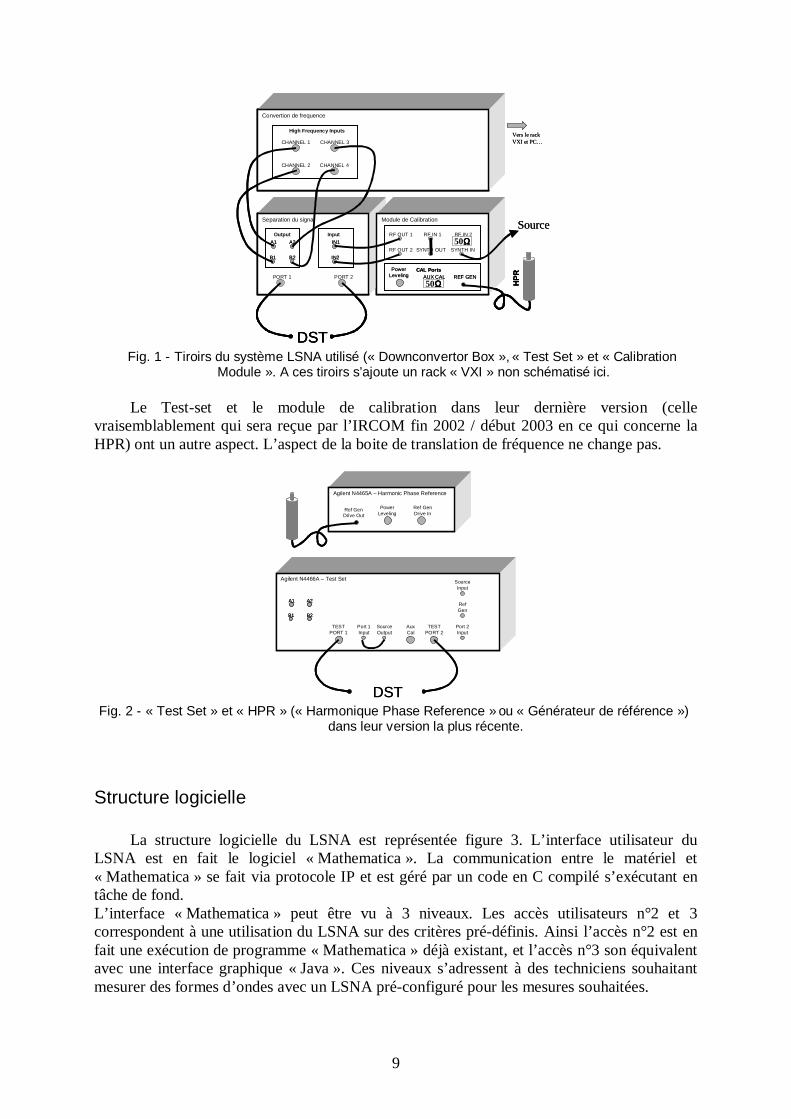
Les mesures seront faites sur une ancienne version hardware du LSNA (la nouvelleversion n’a de nouveau qu’un aspect esthétique simplifié ; le principe et les élémentsconstituants les anciens et nouveaux systèmes sont identiques). Les éléments principaux sontreprésentés figure 1 avec leurs liaisons. Aux tiroirs schématisés s’ajoutent au moins unesource RF (synchronisée via le 10MHz de référence avec le système LSNA), un wattmètre(pour l’étalonnage en puissance et l’étalonnage en phase) et le rack VXI pour uneconfiguration minimale d’un banc de mesure. Le rack VXI contient 6 cartes dont 4 sont lesADC 10 MS/s. Les 2 autres servent à piloter les blocs « conversion de fréquence » (FracN,atténuateurs programmables…) et « Module de calibration ».
9
Vers le rackVXI et PC…
Convertion de frequence
High Frequency Inputs
CHANNEL 1 CHANNEL 3
CHANNEL 4CHANNEL 2
Separation du signal
Output
A1 A2
B2B1
Input
IN1
IN2
PORT 1 PORT 2
Module de Calibration
RF OUT 1 RF IN 1
PowerLeveling REF GEN
CAL PortsAUX CAL
RF IN 2
RF OUT 2 SYNTH OUT SYNTH IN
HP
R
DST
Source
50ΩΩΩΩ
50ΩΩΩΩ
Vers le rackVXI et PC…
Convertion de frequence
High Frequency Inputs
CHANNEL 1 CHANNEL 3
CHANNEL 4CHANNEL 2
Separation du signal
Output
A1 A2
B2B1
Input
IN1
IN2
PORT 1 PORT 2
Module de Calibration
RF OUT 1 RF IN 1
PowerLeveling REF GEN
CAL PortsAUX CAL
RF IN 2
RF OUT 2 SYNTH OUT SYNTH IN
HP
R
DST
Convertion de frequence
High Frequency Inputs
CHANNEL 1 CHANNEL 3
CHANNEL 4CHANNEL 2
Convertion de frequence
High Frequency Inputs
CHANNEL 1 CHANNEL 3
CHANNEL 4CHANNEL 2
Separation du signal
Output
A1 A2
B2B1
Input
IN1
IN2
PORT 1 PORT 2
Separation du signal
Output
A1A1 A2A2
B2B2B1B1
Input
IN1IN1
IN2IN2
PORT 1 PORT 2
Module de Calibration
RF OUT 1 RF IN 1
PowerLeveling REF GEN
CAL PortsAUX CAL
PowerLeveling REF GEN
CAL PortsAUX CAL
RF IN 2
RF OUT 2 SYNTH OUT SYNTH IN
HP
R
DST
Source
50ΩΩΩΩ
50ΩΩΩΩ
Fig. 1 - Tiroirs du système LSNA utilisé (« Downconvertor Box », « Test Set » et « CalibrationModule ». A ces tiroirs s’ajoute un rack « VXI » non schématisé ici.
Le Test-set et le module de calibration dans leur dernière version (cellevraisemblablement qui sera reçue par l’ IRCOM fin 2002 / début 2003 en ce qui concerne laHPR) ont un autre aspect. L’aspect de la boite de translation de fréquence ne change pas.
Agilent N4466A – Test Set
A1 A2
B2B1
Port 1Input
TESTPORT 1
DST
TESTPORT 2
SourceOutput
Port 2Input
AuxCal
RefGen
SourceInput
Agilent N4465A – Harmonic Phase Reference
PowerLeveling
Ref GenDrive In
Ref GenDrive Out
Agilent N4466A – Test Set
A1A1 A2A2
B2B2B1B1
Port 1Input
TESTPORT 1
DST
TESTPORT 2
SourceOutput
Port 2Input
AuxCal
RefGen
SourceInput
Agilent N4465A – Harmonic Phase Reference
PowerLeveling
Ref GenDrive In
Ref GenDrive Out
Fig. 2 - « Test Set » et « HPR » (« Harmonique Phase Reference » ou « Générateur de référence »)dans leur version la plus récente.
Structure logicielle
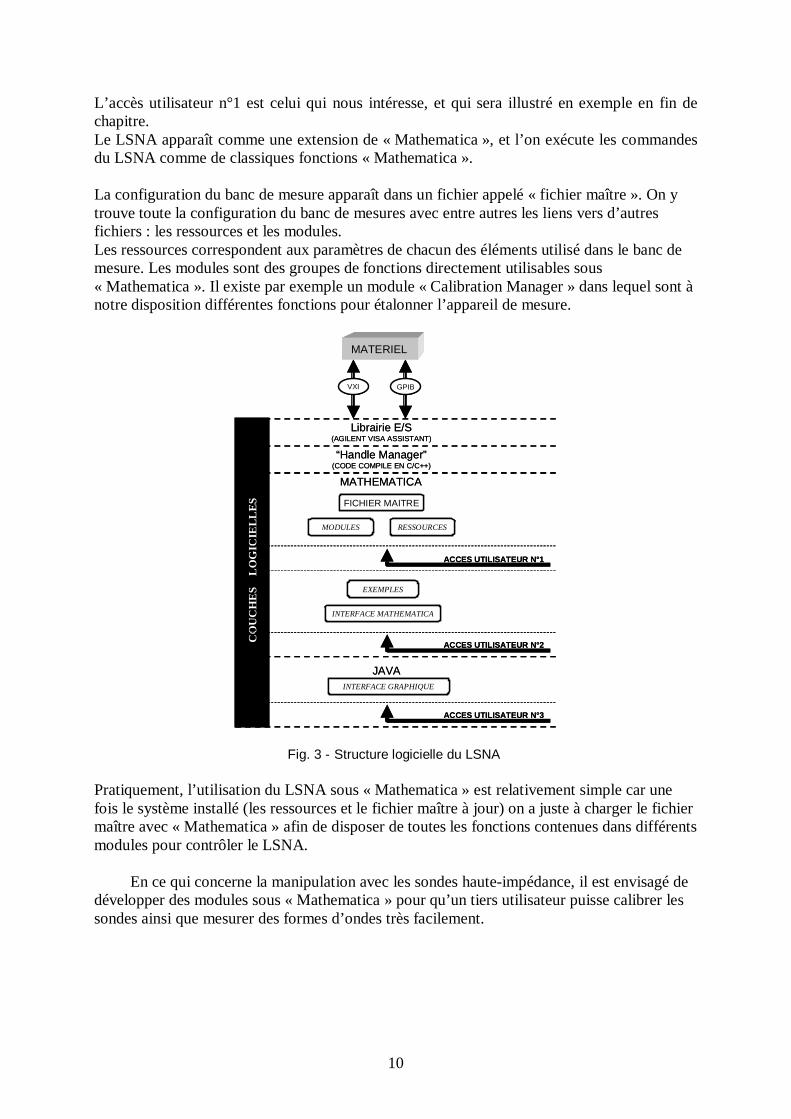
La structure logicielle du LSNA est représentée figure 3. L’ interface utilisateur duLSNA est en fait le logiciel « Mathematica ». La communication entre le matériel et« Mathematica » se fait via protocole IP et est géré par un code en C compilé s’exécutant entâche de fond.L’ interface « Mathematica » peut être vu à 3 niveaux. Les accès utilisateurs n°2 et 3correspondent à une utilisation du LSNA sur des critères pré-définis. Ainsi l’accès n°2 est enfait une exécution de programme « Mathematica » déjà existant, et l’accès n°3 son équivalentavec une interface graphique « Java ». Ces niveaux s’adressent à des techniciens souhaitantmesurer des formes d’ondes avec un LSNA pré-configuré pour les mesures souhaitées.
10
L’accès utilisateur n°1 est celui qui nous intéresse, et qui sera illustré en exemple en fin dechapitre.Le LSNA apparaît comme une extension de « Mathematica », et l’on exécute les commandesdu LSNA comme de classiques fonctions « Mathematica ».
La configuration du banc de mesure apparaît dans un fichier appelé « fichier maître ». On ytrouve toute la configuration du banc de mesures avec entre autres les liens vers d’autresfichiers : les ressources et les modules.Les ressources correspondent aux paramètres de chacun des éléments utilisé dans le banc demesure. Les modules sont des groupes de fonctions directement utilisables sous« Mathematica ». Il existe par exemple un module « Calibration Manager » dans lequel sont ànotre disposition différentes fonctions pour étalonner l’appareil de mesure.
MATERIEL
VXI GPIB
Librairie E/S(AGILENT VISA ASSISTANT)
“Handle Manager”(CODE COMPILE EN C/C++)
MATHEMATICA
CO
UC
HE
S
LO
GIC
IEL
LE
S
MODULES RESSOURCES
FICHIER MAITRE
EXEMPLES
INTERFACE MATHEMATICA
INTERFACE GRAPHIQUE
JAVA
ACCES UTILISATEUR N°1
ACCES UTILISATEUR N°2
ACCES UTILISATEUR N°3
MATERIEL
VXI GPIB
Librairie E/S(AGILENT VISA ASSISTANT)
“Handle Manager”(CODE COMPILE EN C/C++)
MATHEMATICA
CO
UC
HE
S
LO
GIC
IEL
LE
S
MODULES RESSOURCES
FICHIER MAITRE
EXEMPLES
INTERFACE MATHEMATICA
INTERFACE GRAPHIQUE
JAVA
ACCES UTILISATEUR N°1
ACCES UTILISATEUR N°2
ACCES UTILISATEUR N°3
Fig. 3 - Structure logicielle du LSNA
Pratiquement, l’utilisation du LSNA sous « Mathematica » est relativement simple car unefois le système installé (les ressources et le fichier maître à jour) on a juste à charger le fichiermaître avec « Mathematica » afin de disposer de toutes les fonctions contenues dans différentsmodules pour contrôler le LSNA.
En ce qui concerne la manipulation avec les sondes haute-impédance, il est envisagé dedévelopper des modules sous « Mathematica » pour qu’un tiers utilisateur puisse calibrer lessondes ainsi que mesurer des formes d’ondes très facilement.

11
Architecture simplifiée du LSNA
Un schéma simplifié de la structure du LSNA est présenté figure 4.
AD
C
AD
C
AD
C
AD
CA
TT
AT
T
AT
T
AT
T
AAAA
DSTSource RF
SourceFI
Charge(50 Ohms)
Horloge
«D
OW
N-C
ON
VE
RTE
RB
OX
»
«T
ES
T-S
ET
»
«RA
CK
VX
I»
Réf
éren
ce d
e sy
nchr
onis
atio
n (1
0M
Hz)
AD
CA
DC
AD
CA
DC
AD
CA
DC
AD
CA
DC
AT
TA
TT
AT
TA
TT
AT
TA
TT
AT
TA
TT
AAAAAAAA
DSTSource RF
SourceFI
Charge(50 Ohms)
Horloge
«D
OW
N-C
ON
VE
RTE
RB
OX
»
«T
ES
T-S
ET
»
«RA
CK
VX
I»
Réf
éren
ce d
e sy
nchr
onis
atio
n (1
0M
Hz)
Fig. 4 - Schéma simplifié du système LSNA
Le cœur du système, à savoir le « Down-convertor Box » est en fait constitué de 2 cartes deMTA. On retrouve donc sur 4 voies un mélange harmonique ainsi que des filtres actifs etautres éléments présents dans le MTA. Tous les éléments de ces cartes ne sont pas utilisés.Par exemple un amplificateur variable est présent dans les cartes pour permettre aux ADC duMTA (très faible en dynamique) une conversion optimale. Dans le cas du LSNA, lescorrections à faire sur le signal sont faites de façon logicielle, après les mesures directes deADC qui disposent d’une très grande dynamique (24 bits). Le tiroir n’est donc utilisé quepour le mélange harmonique (ou échantillonnage harmonique).
Les atténuateurs programmables assurent une dynamique optimale en s’assurant que les ADCdu Rack VXI ne sont pas saturés. Les positions de ces atténuateurs programmables sont de 0 à40 dB par pas de 10 dB : soit 5 positions possibles.
Principe de l’échantillonnage harmonique (DownConverter Box)
L’échantillonnage harmonique reprend le principe d’échantillonnage des oscilloscopes àéchantillonnage car il repose sur un sous échantillonnage de l’onde RF. En considérant unefréquence d’échantillonnage fe et une fréquence de signal RF fRF, l’échantillonnageharmonique est représenté conjointement dans les domaines temporel et fréquentiel figure 5.Par soucis de simplification, seule la représentation fréquentielle a été représentée multi-harmonique.On visualise par la représentation temporelle, que l’échantillonnage se fait par répétition etnécessite donc des signaux RF parfaitement périodiques.

12
Les relations arithmétiques reliant les ondes RF, la fréquence d’échantillonnage et le nombrede points du signal FI sont clairement explicité dans [11] et [34] par exemple.Avec le LSNA, la fréquence d’échantillonnage est typiquement comprise entre 19 et 20 MHz.
TEMPS
Domaine Temporel Domaine Fréquentiel
… …… … …
FREQUENCE
TEMPS
Signal RFSignal FIImpultions (fe)
Spectre RFSpectre FIPeigne fréquentiel (fe)
FREQUENCE
PR
OD
UIT
CO
NV
OLU
TIO
N
fRF
fFI
fe 2.fRF
2.fFI
k.fe 2k.fe
fFI 2.fFI
fe/2
TEMPSTEMPS
Domaine Temporel Domaine Fréquentiel
… …… … …
FREQUENCE
TEMPSTEMPS
Signal RFSignal FIImpultions (fe)
Signal RFSignal FIImpultions (fe)
Spectre RFSpectre FIPeigne fréquentiel (fe)
FREQUENCE
PR
OD
UIT
PR
OD
UIT
CO
NV
OLU
TIO
N
fRF
fFI
fe 2.fRF
2.fFI
k.fe 2k.fe
fFI 2.fFI
fe/2
Fig. 5 - Illustration du principe d’échantillonnage harmonique
D’un point de vue matériel, la figure 6 propose une illustration d’une des voies de la partie« translation de fréquence » du LSNA.
Ref. 10 MHz« Frac N »
A
SRD Tête d’échantillonnage
Mise en formedes impulsions
Signal RF
Signal FI
Autres voies du « Down Converter Box »
Ref. 10 MHz« Frac N »
A
SRD Tête d’échantillonnage
Mise en formedes impulsions
Signal RF
Signal FI
Autres voies du « Down Converter Box »
Fig. 6 - Schématisation d’une des voies de la boîte de conversion de fréquence
Le « Frac N » est un synthétiseur de grande qualité. Il peut fournir une fréquence compriseentre 10 et 20 MHz, avec une résolution supérieure à 1 Hz et une précision qui dépend de lasource utilisée en référence.La diode SRD (Step Recovery Diode) doit être vue comme un générateur d’ impulsions. Lapériode du train d’ impulsions est celle du signal sinusoïdal généré par le « Frac N ».Un mélange est ensuite réalisé entre le signal issu de la SRD (peigne fréquentiel) et lessignaux RF. Des produits ainsi réalisés, seules les composantes FI de fréquence inférieure à4 MHz sont conservées (utilisation d’un filtre passe bas).
13
Le générateur de référence (HPR)
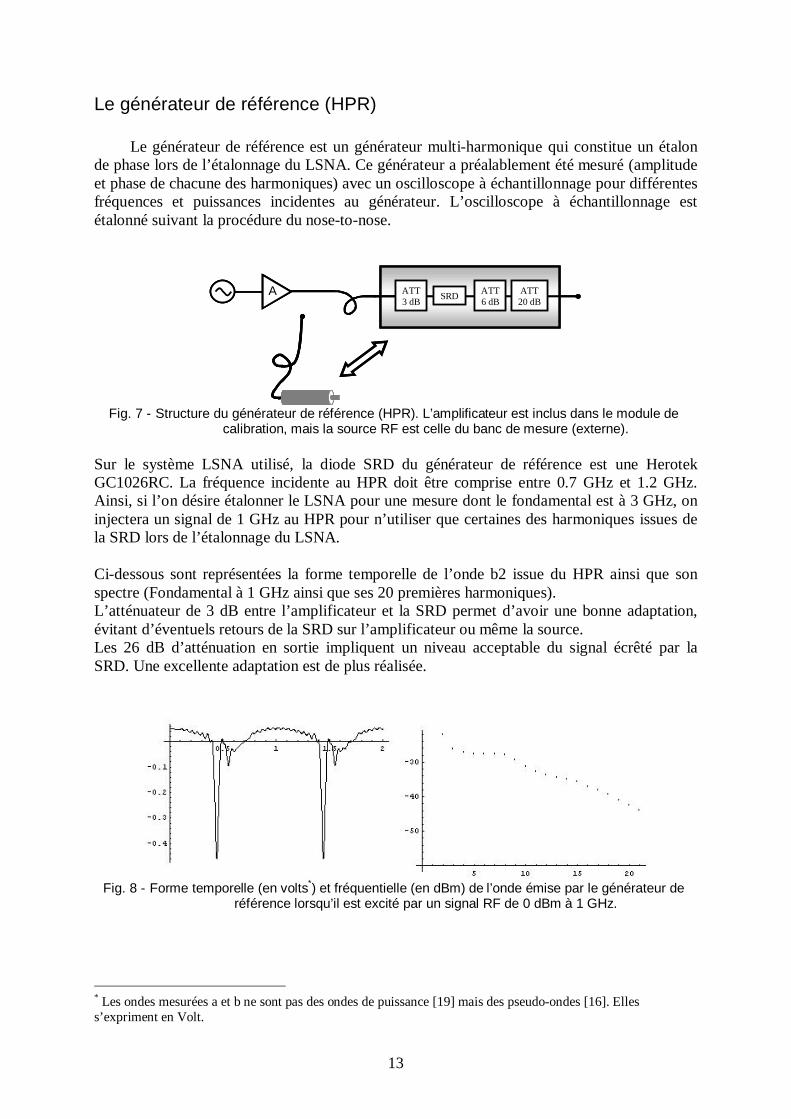
Le générateur de référence est un générateur multi-harmonique qui constitue un étalonde phase lors de l’étalonnage du LSNA. Ce générateur a préalablement été mesuré (amplitudeet phase de chacune des harmoniques) avec un oscilloscope à échantillonnage pour différentesfréquences et puissances incidentes au générateur. L’oscilloscope à échantillonnage estétalonné suivant la procédure du nose-to-nose.
A ATT3 dB
SRDATT6 dB
ATT20 dB
AA ATT3 dB
SRDATT6 dB
ATT20 dB
Fig. 7 - Structure du générateur de référence (HPR). L’amplificateur est inclus dans le module decalibration, mais la source RF est celle du banc de mesure (externe).
Sur le système LSNA utilisé, la diode SRD du générateur de référence est une HerotekGC1026RC. La fréquence incidente au HPR doit être comprise entre 0.7 GHz et 1.2 GHz.Ainsi, si l’on désire étalonner le LSNA pour une mesure dont le fondamental est à 3 GHz, oninjectera un signal de 1 GHz au HPR pour n’utiliser que certaines des harmoniques issues dela SRD lors de l’étalonnage du LSNA.
Ci-dessous sont représentées la forme temporelle de l’onde b2 issue du HPR ainsi que sonspectre (Fondamental à 1 GHz ainsi que ses 20 premières harmoniques).L’atténuateur de 3 dB entre l’amplificateur et la SRD permet d’avoir une bonne adaptation,évitant d’éventuels retours de la SRD sur l’amplificateur ou même la source.Les 26 dB d’atténuation en sortie impliquent un niveau acceptable du signal écrêté par laSRD. Une excellente adaptation est de plus réalisée.
Fig. 8 - Forme temporelle (en volts*) et fréquentielle (en dBm) de l’onde émise par le générateur deréférence lorsqu’il est excité par un signal RF de 0 dBm à 1 GHz.
* Les ondes mesurées a et b ne sont pas des ondes de puissance [19] mais des pseudo-ondes [16]. Elless’expriment en Volt.

14
Principe de Calibration du LSNA
Le principe de calibration du LSNA est divisé en 3 étapes :
- un étalonnage classique comme celui utilisé pour les analyseurs de réseautraditionnels ;
- un étalonnage en puissance ;- un étalonnage en phase.
L’étalonnage utilisé par les Analyseurs de réseaux est un étalonnage relatif : les ARV nemesurant que des rapports d’ondes. Ce type d’étalonnage conduit à la connaissance dematrices d’erreurs corrigeant les rapports d’ondes mesurées directement.Disposant alors des rapports d’ondes CORRIGES, il convient de connaître la matrice d’erreurABSOLUE du système pour 1 seule onde mesurée, afin d’en déduire les autres. C’est ce quiest fait avec le LSNA.L’onde (a1) est donc mesurée très précisément en amplitude et en phase.Les étalons utilisés pour cet étalonnage absolu sont le wattmètre (étalon d’amplitude tel qu’ ilest utilisé pour le banc télécom [28]) et le générateur de référence (amplitude et phase dechacune des raies ont été pré-caractérisé).
L’étalonnage du LSNA peut donc quasiment être vu comme l’étalonnage d’un ARVclassique.
Les corrections apportées sur les mesures du LSNA par rapport aux termes d’erreurs déduitspar étalonnage ne sont pas présentées dans ce rapport. On peut se reporter aux travaux surl’étalonnage du LSNA pour cela [10] [11].
Les étalonnages qui sont utilisés couramment (et donc implémentés dans des modules« Mathematica ») à Agilent NMDG sont :
Pour des mesures en connectorisé :- SOLT (Short Open Load) ;- MTRL (MultiLine / Through Reflect Line).
Pour des mesures « on-wafer » :- LRRM (Line Reflect Reflect Match).
Une procédure d’étalonnage MTRL « on-wafer » est en développement. Elle conduitactuellement à des indéterminations. Bien que les procédures d’étalonnages ne soit pasdécrites dans ce rapport, nous verrons néanmoins d’où vient cette indétermination car nousnous pencherons, lors de la dernière partie de ce rapport, sur le MTRL pour la déterminationde la constante de propagation d’un mode d’une ligne.
La technique du Multiline TRL a été introduite par le NIST [7] [24]. C’est une techniqueextrêmement rigoureuse d’un point de vu théorique car elle prend ses sources aux équationsde Maxwell, et permet un étalonnage d’appareil de mesure avec un minimum de conditions.Néanmoins, il s’agit plus d’un standard pour la métrologie que d’une méthode pratique pourétalonner rapidement un appareil de mesure.Dans la bande DC-40 GHz, l’étalonnage connectorisé en SOLT donne entière satisfaction etla technique du LRRM est la meilleure qui soit pour des mesures sous pointes [12].
15
Evolutions du LSNA
Le LSNA est l’objet de travaux qui tendent à le modifier et le faire évoluer.
L’équipe d’Agilent NMDG travaille actuellement sur une amélioration de l’étalonnage.En effet, actuellement l’étalonnage en phase donne un terme de déphasage existant entre unsignal RF et le signal mesuré grâce au HPR. Il existe donc par exemple un terme à 1 GHz et àchacune des harmoniques de 1 GHz. Lors d’une utilisation du LSNA en signaux modulés, lacorrection en phase et celle obtenue en monoporteuse. Ainsi toute l’enveloppe aufondamentale est corrigée par un même terme d’erreur de phase, l’enveloppe de la premièreharmonique par un autre terme (celui de l’harmonique de 1 GHz), …etc…Le but des travaux menés consiste à trouver un étalonnage de phase d’enveloppesupplémentaire à l’étalonnage de phase de porteuse déjà existant.
Par ailleurs, compte tenu de la demande croissante de chercheurs et industriels encaractérisation « système », Agilent NMDG travaille sur des mesures calibrées de signauxbiporteuses dont la fréquence de battement est supérieure à 8 MHz. Cela signifie que lespectre du signal FI en sortie de conversion de fréquence contient les informations du spectreRF mais de façon séquentielle désordonnée si on l’analyse en fonction de la fréquenceintermédiaire (c’est assez similaire aux travaux entrepris par Jean-Pierre Teyssier pourretrouver la forme temporelle d’un signal pulsé [34]). Un étalonnage automatique pourpermettre de telles mesures est envisagé.
De plus, l’équipe d’Agilent NMDG pense, dans le but de diminuer le prix d’un systèmeLSNA, à remplacer les cartes d’échantillonnage VXI 23 bits par des cartes moins chères. Eneffets, une quantification sur 23 bits (soit 130 dB de dynamique) et un luxe vis à vis del’échantillonnage harmonique qui présente une dynamique d’environ 65 dB.
Enfin, le département ELEC de la VUB travaille actuellement sur une version 3 ports(« Down-converter Box à 6 accès !!) afin de permettre une caractérisation non linéaire totalede mélangeurs.
Utilisation pragmatique du LSNA
Cette partie propose un exemple illustré d’un étalonnage (SOLT 2,4 mm) et d’une mesure surun amplificateur connectorisé du commerce : le « HP 83006A Microwave System Amplifier.01-26.5 GHz ». Le kit d’étalonnage utilisé est prévu dans le fichier maître (« Master File »)par un lien vers le fichier ressource décrivant ses paramètres.Ce qu’on appelle « port 1 » et « port 2 » sont les plans de références du dispositif sous test :les plans où est fait l’étalonnage.
Etalonnage
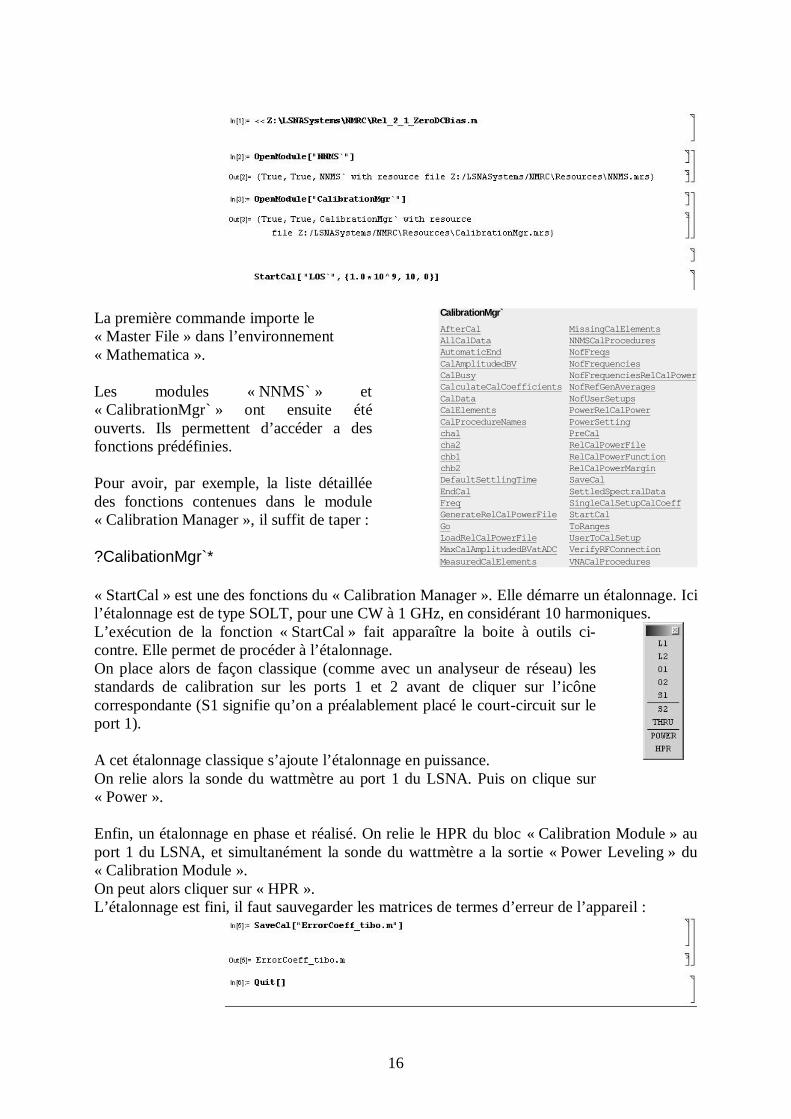
Après avoir lancé « Mathematica », les instructions suivantes sont exécutées :
16
La première commande importe le« Master File » dans l’environnement« Mathematica ».
Les modules « NNMS` » et« CalibrationMgr` » ont ensuite étéouverts. Ils permettent d’accéder a desfonctions prédéfinies.
Pour avoir, par exemple, la liste détailléedes fonctions contenues dans le module« Calibration Manager », il suffit de taper :
?CalibationMgr`*
CalibrationMgr`
AfterCal MissingCalElementsAllCalData NNMSCalProceduresAutomaticEnd NofFreqsCalAmplitudedBV NofFrequenciesCalBusy NofFrequenciesRelCalPowerCalculateCalCoefficients NofRefGenAveragesCalData NofUserSetupsCalElements PowerRelCalPowerCalProcedureNames PowerSettingcha1 PreCalcha2 RelCalPowerFilechb1 RelCalPowerFunctionchb2 RelCalPowerMarginDefaultSettlingTime SaveCalEndCal SettledSpectralDataFreq SingleCalSetupCalCoeffGenerateRelCalPowerFile StartCalGo ToRangesLoadRelCalPowerFile UserToCalSetupMaxCalAmplitudedBVatADC VerifyRFConnectionMeasuredCalElements VNACalProcedures
« StartCal » est une des fonctions du « Calibration Manager ». Elle démarre un étalonnage. Icil’étalonnage est de type SOLT, pour une CW à 1 GHz, en considérant 10 harmoniques.L’exécution de la fonction « StartCal » fait apparaître la boite à outils ci-contre. Elle permet de procéder à l’étalonnage.On place alors de façon classique (comme avec un analyseur de réseau) lesstandards de calibration sur les ports 1 et 2 avant de cliquer sur l’ icônecorrespondante (S1 signifie qu’on a préalablement placé le court-circuit sur leport 1).
A cet étalonnage classique s’ajoute l’étalonnage en puissance.On relie alors la sonde du wattmètre au port 1 du LSNA. Puis on clique sur« Power ».
Enfin, un étalonnage en phase et réalisé. On relie le HPR du bloc « Calibration Module » auport 1 du LSNA, et simultanément la sonde du wattmètre a la sortie « Power Leveling » du« Calibration Module ».On peut alors cliquer sur « HPR ».L’étalonnage est fini, il faut sauvegarder les matrices de termes d’erreur de l’appareil :
17
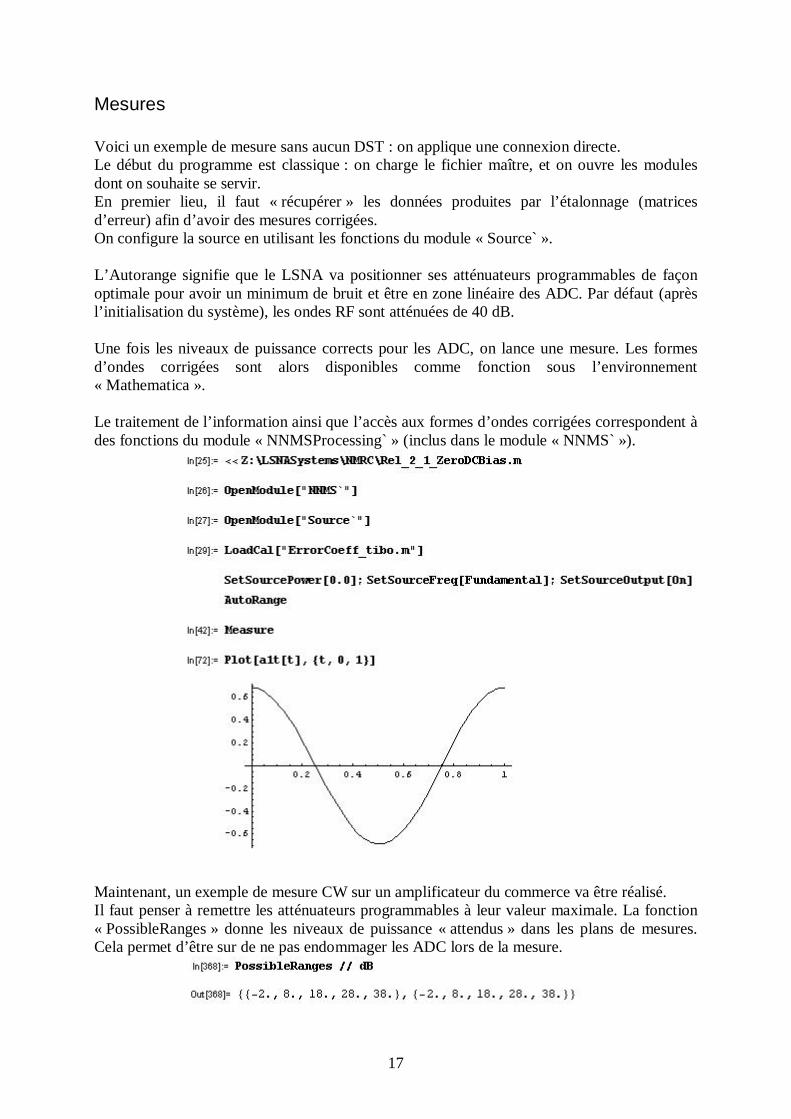
Mesures
Voici un exemple de mesure sans aucun DST : on applique une connexion directe.Le début du programme est classique : on charge le fichier maître, et on ouvre les modulesdont on souhaite se servir.En premier lieu, il faut « récupérer » les données produites par l’étalonnage (matricesd’erreur) afin d’avoir des mesures corrigées.On configure la source en utilisant les fonctions du module « Source ».
L’Autorange signifie que le LSNA va positionner ses atténuateurs programmables de façonoptimale pour avoir un minimum de bruit et être en zone linéaire des ADC. Par défaut (aprèsl’ initialisation du système), les ondes RF sont atténuées de 40 dB.
Une fois les niveaux de puissance corrects pour les ADC, on lance une mesure. Les formesd’ondes corrigées sont alors disponibles comme fonction sous l’environnement« Mathematica ».
Le traitement de l’ information ainsi que l’accès aux formes d’ondes corrigées correspondent àdes fonctions du module « NNMSProcessing` » (inclus dans le module « NNMS` »).
Maintenant, un exemple de mesure CW sur un amplificateur du commerce va être réalisé.Il faut penser à remettre les atténuateurs programmables à leur valeur maximale. La fonction« PossibleRanges » donne les niveaux de puissance « attendus » dans les plans de mesures.Cela permet d’être sur de ne pas endommager les ADC lors de la mesure.

18
Une atténuation de 40 dB est faite sur les 2 canaux de mesures (les 4 accès) en imposant la5eme valeur d’atténuation parmi celles possibles (environ 40 dB d’atténuation).
Une mesure d’un amplificateur directement connecté au LSNA peut être noyée dans du bruit.I l faut donc faire un AutoRange avant l’acquisition :
Le programme réalise en faite un asservissement entre les ADC et les atténuateursprogrammables en contrôlant si les ADC sont écrêtés. Il déduit ainsi les positions desatténuateurs programmables. I ls faut noter que les atténuateurs programmables ne sont pasaccessibles indépendamment. Ainsi la voie a1 aura la même atténuation que la voie b1 (icienviron 0 dB), et la voie a2 que celle imposée sur la voie b2 (environ 20 dB). Cela peut êtreune limite lorsqu’on souhaite utiliser les 4 voies du tiroir compression de fréquence à des finsautres que pour les mesures classiques d’ondes de puissance couplée. Mais cela pourra êtrechangé si le besoin s’en fait sentir avec les sondes haute-impédance.
Exemples de mesures corrigées :
0.5 1 1.5 2
-0.4
-0.2
0.2
0.4
0.5 1 1.5 2
-0.04
-0.02
0.02
0.04
0.5 1 1.5 2
-0.06
-0.04
-0.02
0.02
0.04
0.06
0.5 1 1.5 2
-3
-2
-1
1
2
0.5 1 1.5 2
-0.4
-0.2
0.2
0.4
0.5 1 1.5 2
-0.04
-0.02
0.02
0.04
0.5 1 1.5 2
-0.06
-0.04
-0.02
0.02
0.04
0.06
0.5 1 1.5 2
-3
-2
-1
1
2
0.5 1 1.5 2
-0.4
-0.2
0.2
0.4
0.5 1 1.5 2
-0.04
-0.02
0.02
0.04
0.5 1 1.5 2
-0.06
-0.04
-0.02
0.02
0.04
0.06
0.5 1 1.5 2
-3
-2
-1
1
2
19
PROBLEMATIQUE LIEE A LA MESUREDE FORMES D’ONDES TEMPORELLES
A L’AIDE DE SONDES « HAUTEIMPEDANCE »
Des expériences avec des sondes haute-impédance ont déjà été le sujet de travauxprésents dans la littérature. Ce chapitre propose d’avoir un aperçu des références existantessur la mesure de formes d’ondes temporelles avec des sondes haute-impédance ainsi que surles méthodes utilisées pour l’étalonnage des sondes. Les solutions envisagées pour la mise enplace d’un banc de mesure autour du LSNA seront présentées.
Formalismes théoriques
Ce paragraphe présente quelques définitions et notions qui seront utilisées dans la suitedu chapitre.
Matrices [S] et [T]
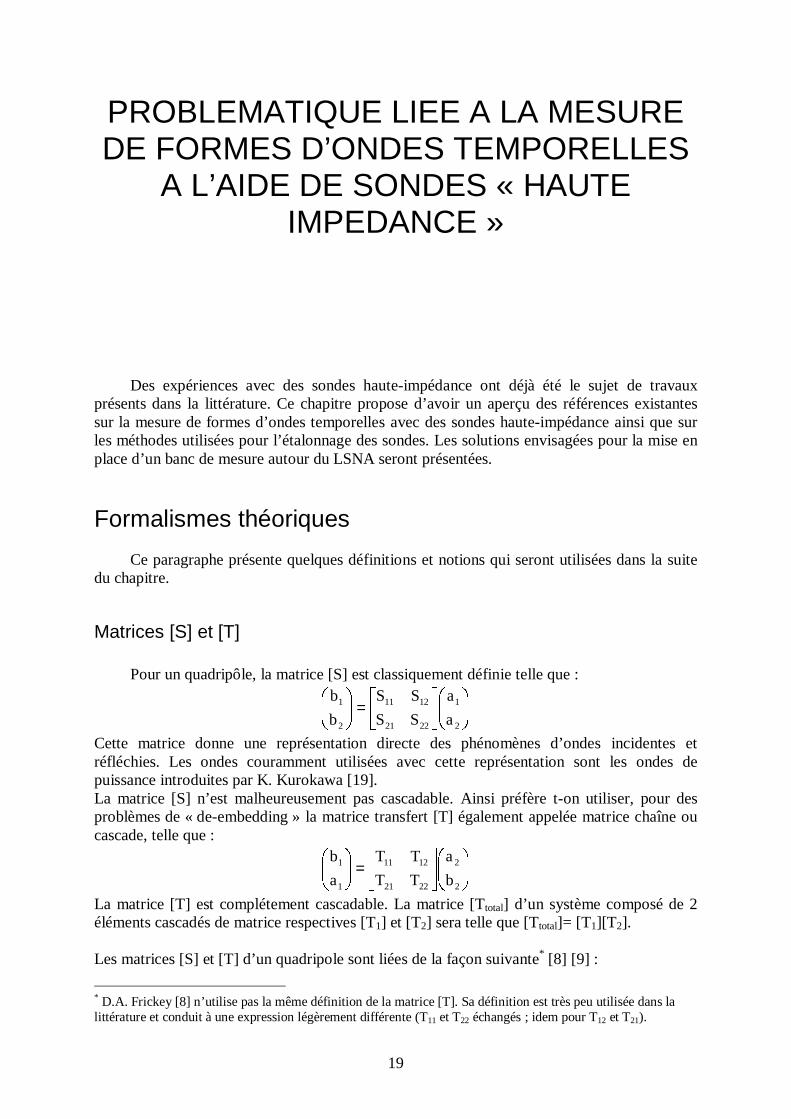
Pour un quadripôle, la matrice [S] est classiquement définie telle que :
=
2
1
2221
1211
2
1
a
a
SS
SS
b
b
Cette matrice donne une représentation directe des phénomènes d’ondes incidentes etréfléchies. Les ondes couramment utilisées avec cette représentation sont les ondes depuissance introduites par K. Kurokawa [19].La matrice [S] n’est malheureusement pas cascadable. Ainsi préfère t-on utiliser, pour desproblèmes de « de-embedding » la matrice transfert [T] également appelée matrice chaîne oucascade, telle que :
=
2
2
2221
1211
1
1
b
a
TT
TT
a
b
La matrice [T] est complétement cascadable. La matrice [Ttotal] d’un système composé de 2éléments cascadés de matrice respectives [T1] et [T2] sera telle que [Ttotal]= [T1][T2].
Les matrices [S] et [T] d’un quadripole sont liées de la façon suivante* [8] [9] :
* D.A. Frickey [8] n’utilise pas la même définition de la matrice [T]. Sa définition est très peu utilisée dans lalittérature et conduit à une expression légèrement différente (T11 et T22 échangés ; idem pour T12 et T21).
20
[ ]
−−
=1S
SS.SS.S
S
1T
22
1122112112
21
et [ ]
−−
=21
2112221112
22 T1
T.TT.TT
T
1S
Frickey, dans son article [8] propose également les relations existantes entres les ondes depuissances et les tensions et courants présents aux accès d’un quadripôle. Les relations ont étédiscutées et contredites par Marks et Williams [9]. L’origine du problème est qu’une onde depuissance est un artefact mathématique ne correspond par réellement aux ondes qui sepropagent, et n’ont aucun sens lorsque l’ impédance caractéristique de la propagation estcomplexe. Marks et Williams [16] proposent un autre artifice mathématique qui prend encompte une éventuelle partie imaginaire d’ impédance caractéristique et correspond, danscertaines conditions, parfaitement aux ondes qui se propagent : les pseudo-ondes.
Les pseudo-ondes
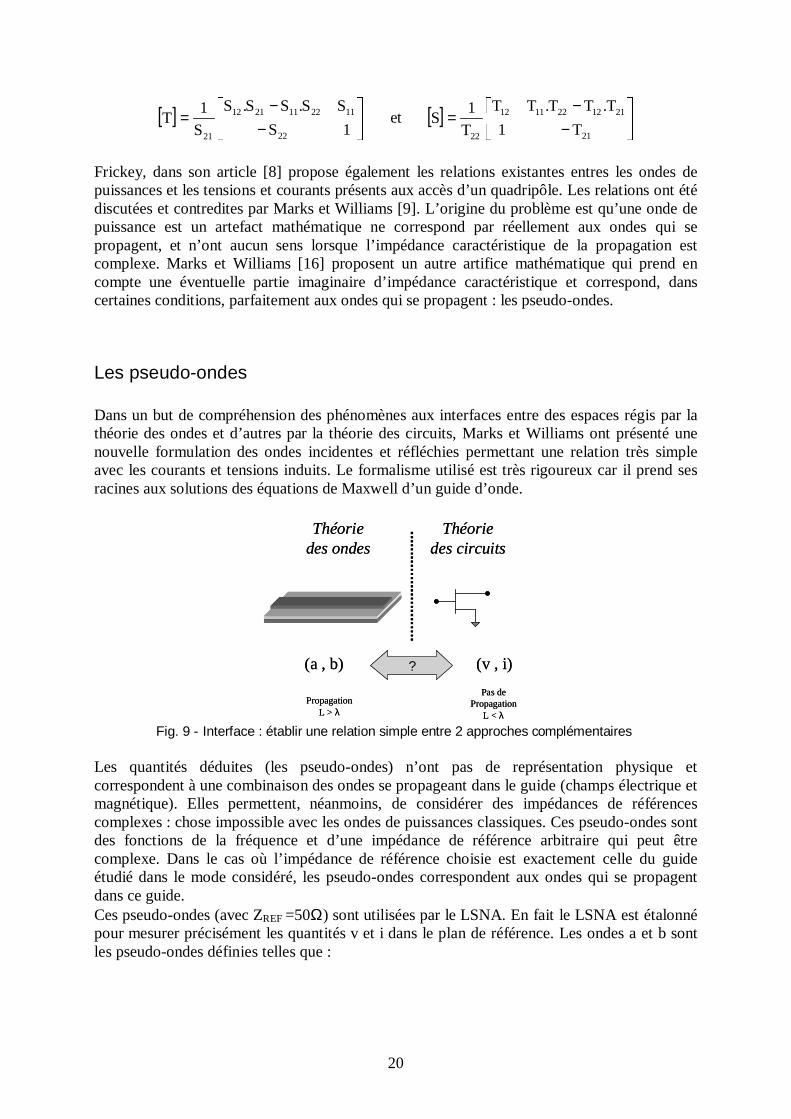
Dans un but de compréhension des phénomènes aux interfaces entre des espaces régis par lathéorie des ondes et d’autres par la théorie des circuits, Marks et Williams ont présenté unenouvelle formulation des ondes incidentes et réfléchies permettant une relation très simpleavec les courants et tensions induits. Le formalisme utilisé est très rigoureux car il prend sesracines aux solutions des équations de Maxwell d’un guide d’onde.
Théoriedes ondes
Théoriedes circuits
(a , b) (v , i)
PropagationL > λ
Pas de Propagation
L < λ
?
Théoriedes ondes
Théoriedes circuits
(a , b) (v , i)
PropagationL > λ
Pas de Propagation
L < λ
?
Fig. 9 - Interface : établir une relation simple entre 2 approches complémentaires
Les quantités déduites (les pseudo-ondes) n’ont pas de représentation physique etcorrespondent à une combinaison des ondes se propageant dans le guide (champs électrique etmagnétique). Elles permettent, néanmoins, de considérer des impédances de référencescomplexes : chose impossible avec les ondes de puissances classiques. Ces pseudo-ondes sontdes fonctions de la fréquence et d’une impédance de référence arbitraire qui peut êtrecomplexe. Dans le cas où l’ impédance de référence choisie est exactement celle du guideétudié dans le mode considéré, les pseudo-ondes correspondent aux ondes qui se propagentdans ce guide.Ces pseudo-ondes (avec ZREF =50Ω) sont utilisées par le LSNA. En fait le LSNA est étalonnépour mesurer précisément les quantités v et i dans le plan de référence. Les ondes a et b sontles pseudo-ondes définies telles que :

21
−=
+=
2
i.Zvb
2
i.Zva
REF
REF
−=
+=
REFZ
bai
bav
La plupart des relations utilisées avec les ondes de puissances (matrices [S] ou [T]) restentvalident avec les pseudo-ondes. L’unité des pseudo-ondes est le volt.
Mesurer à l’aide de sondes haute-impédance
Nous allons voir comment obtenir des informations utiles (tension et courant ou ondesincidente et réfléchie) au cœur même des circuits MMIC grâce à la mesure de formes d’ondetemporelles réalisée avec des sondes haute-impédance.
Principe de mesure
On s’ intéresse à la caractérisation des ondes temporelles à certains points de circuitsMMICs. Pour cela, on se propose de mesurer 2 tensions (V1 et V2), à des positions distantesd’une longueur connue L, sur une des lignes du circuit grâce aux sondes haute-impédance. Ausein de la ligne se propagent des ondes incidentes et réfléchies correspondant à une porteuseRF et à ses harmoniques. Le principe des mesures à effectuer est représenté schématiquementfigure 10.
V1 V2
L
V1 V2
L
Fig. 10 - Principe de caractérisation sur une ligne a moyen de sondes haute-impédance
Les mesures de 2 tensions distinctes à un même instant, à des positions connues sur la lignesont indispensables pour pouvoir séparer les ondes incidentes et réfléchies.En effet, d’après l’équation des télégraphistes, et en posant l1 et l2 les positions respectives dessondes donnant lieu aux mesures V1 et V2, on a :
( )( )
+==+==
γ+−
γ−+
γ+−
γ−+
22
11
l.l.22
l.l.11
e.Ve.VlVV
e.Ve.VlVV
Les solutions de ce système sont :

22
−−=
−−=
γ+γ+
γ+γ+
−
γ−γ−
γ−γ−
+
21
21
21
21
l.2l.2
l.2
l.1
l.2l.2
l.2
l.1
eee.Ve.V
V
ee
e.Ve.VV
Le changement de variable 0l1 = et Ll 2 = conduit aux expressions suivantes :
( )
( )
γ−−=
γ−=
γ−
−
γ+
+
L.Sinh.2Ve.V
V
L.Sinh.2Ve.V
V
2L.
1
2L.
1
En raisonnant en ondes de tension incidente (a) et réfléchie(b), on peut écrire :
==
−
+
Vb
Va et
−=+=
0Z
bai
bav
oùv est la tension total au point de mesure l1 ;i est le courant total au même point ;Z0 est l’ impédance caractéristique de la ligne mesurée.
En conclusion, pour permettre la caractérisation des ondes de propagation dans une ligne d’unMMIC, il faut connaître les caractéristiques de cette ligne ; à savoir :
( )ωγ : la constante de propagation du mode en cours en fonction de la fréquence ;
( )ω0Z : l’ impédance caractéristique de la ligne en fonction de la fréquence.
On peut simplifier d’avantage les expressions des ondes en émettant les 2 hypothèsesrestrictives suivantes :
• ( ) ( ) ( ) ( )ωβ≈ωβ+ωα=ωγ .j.j : on néglige toutes les pertes dans l’expression de laconstante de propagation ;
• ( )L
.τω≈ωβ où τ correspond au temps de propagation dans la ligne de longueur L.
Ce temps est supposé constant dans toute la bande d’analyse. I l vient alors les expressions :
( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( )( )
ωτ−ω−ω=ω=ω
ωτω−ω
=ω=ωωτ−
−
ωτ+
+
Sin.j2
Ve.VVb
Sin.j2
Ve.VVa
2j
1
2.j
1
Banc de mesure autour d’un MTA
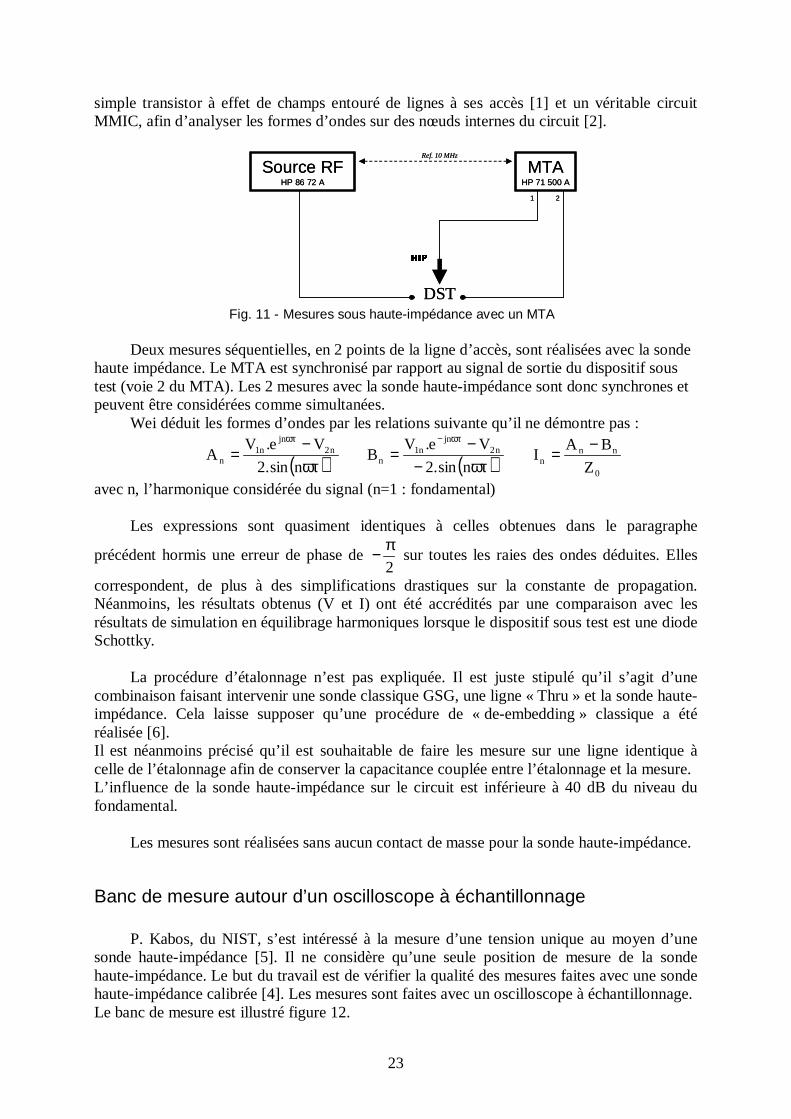
Le banc de mesure présenté est celui développé par C.J. Wei. Le schéma du banc estprésenté figure 11. Des résultats ont été présentés pour différents dispositifs sous test : un
23
simple transistor à effet de champs entouré de lignes à ses accès [1] et un véritable circuitMMIC, afin d’analyser les formes d’ondes sur des nœuds internes du circuit [2].
MTAHP 71 500 A
Source RFHP 86 72 A
Ref. 10 MHz
DST
1 2
MTAHP 71 500 A
Source RFHP 86 72 A
Ref. 10 MHz
DST
1 2
Fig. 11 - Mesures sous haute-impédance avec un MTA
Deux mesures séquentielles, en 2 points de la ligne d’accès, sont réalisées avec la sondehaute impédance. Le MTA est synchronisé par rapport au signal de sortie du dispositif soustest (voie 2 du MTA). Les 2 mesures avec la sonde haute-impédance sont donc synchrones etpeuvent être considérées comme simultanées.
Wei déduit les formes d’ondes par les relations suivante qu’ il ne démontre pas :
( )ωτ−
=ωτ
nsin.2
Ve.VA n2
jnn1
n ( )ωτ−−
=ωτ−
nsin.2
Ve.VB n2
jnn1
n 0
nnn Z
BAI
−=
avec n, l’harmonique considérée du signal (n=1 : fondamental)
Les expressions sont quasiment identiques à celles obtenues dans le paragraphe
précédent hormis une erreur de phase de 2
π− sur toutes les raies des ondes déduites. Elles
correspondent, de plus à des simplifications drastiques sur la constante de propagation.Néanmoins, les résultats obtenus (V et I) ont été accrédités par une comparaison avec lesrésultats de simulation en équilibrage harmoniques lorsque le dispositif sous test est une diodeSchottky.
La procédure d’étalonnage n’est pas expliquée. I l est juste stipulé qu’ il s’agit d’unecombinaison faisant intervenir une sonde classique GSG, une ligne « Thru » et la sonde haute-impédance. Cela laisse supposer qu’une procédure de « de-embedding » classique a étéréalisée [6].I l est néanmoins précisé qu’ il est souhaitable de faire les mesure sur une ligne identique àcelle de l’étalonnage afin de conserver la capacitance couplée entre l’étalonnage et la mesure.L’ influence de la sonde haute-impédance sur le circuit est inférieure à 40 dB du niveau dufondamental.
Les mesures sont réalisées sans aucun contact de masse pour la sonde haute-impédance.
Banc de mesure autour d’un oscilloscope à échantillonnage
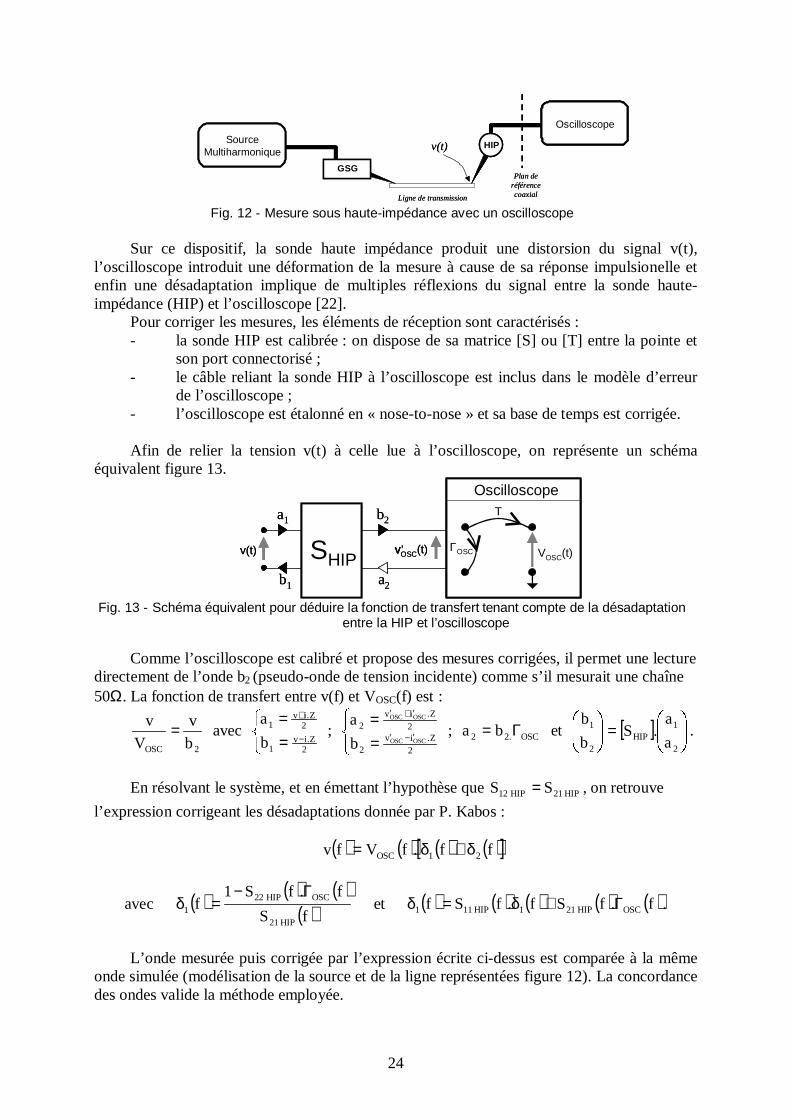
P. Kabos, du NIST, s’est intéressé à la mesure d’une tension unique au moyen d’unesonde haute-impédance [5]. Il ne considère qu’une seule position de mesure de la sondehaute-impédance. Le but du travail est de vérifier la qualité des mesures faites avec une sondehaute-impédance calibrée [4]. Les mesures sont faites avec un oscilloscope à échantillonnage.Le banc de mesure est illustré figure 12.
24
HIP
GSG
SourceMultiharmonique
Oscilloscope
Plan deréférencecoaxialLigne de transmission
v(t) HIP
GSG
SourceMultiharmonique
Oscilloscope
Plan deréférencecoaxialLigne de transmission
v(t)
Fig. 12 - Mesure sous haute-impédance avec un oscilloscope
Sur ce dispositif, la sonde haute impédance produit une distorsion du signal v(t),l’oscilloscope introduit une déformation de la mesure à cause de sa réponse impulsionelle etenfin une désadaptation implique de multiples réflexions du signal entre la sonde haute-impédance (HIP) et l’oscilloscope [22].
Pour corriger les mesures, les éléments de réception sont caractérisés :- la sonde HIP est calibrée : on dispose de sa matrice [S] ou [T] entre la pointe et
son port connectorisé ;- le câble reliant la sonde HIP à l’oscilloscope est inclus dans le modèle d’erreur
de l’oscilloscope ;- l’oscilloscope est étalonné en « nose-to-nose » et sa base de temps est corrigée.
Afin de relier la tension v(t) à celle lue à l’oscilloscope, on représente un schémaéquivalent figure 13.
SHIPv(t) ΓOSC
T
VOSC(t)
Oscilloscope
a1
b1
b2
a2
vOSC(t)v’SHIPv(t) ΓOSC
T
VOSC(t)
Oscilloscope
ΓOSC
T
VOSC(t)
Oscilloscope
a1
b1
b2
a2
vOSC(t)v’
Fig. 13 - Schéma équivalent pour déduire la fonction de transfert tenant compte de la désadaptationentre la HIP et l’oscilloscope
Comme l’oscilloscope est calibré et propose des mesures corrigées, il permet une lecturedirectement de l’onde b2 (pseudo-onde de tension incidente) comme s’ il mesurait une chaîne50Ω. La fonction de transfert entre v(f) et VOSC(f) est :
2OSC b
v
V
v = avec ==
−
+
2Z.iv
1
2Z.iv
1
b
a ;
==
′−′
′+′
2Z.iv
2
2Z.iv
2
OSCOSC
OSCOSC
b
a ; OSC.22 ba Γ= et [ ]
=
2
1HIP
2
1
a
a.S
b
b.
En résolvant le système, et en émettant l’hypothèse que HIP21HIP12 SS = , on retrouve
l’expression corrigeant les désadaptations donnée par P. Kabos :
( ) ( ) ( ) ( )[ ]ff.fVfv 21OSC δ+δ=
avec ( ) ( ) ( )( )fS
f.fS1f
HIP21
OSCHIP221
Γ−=δ et ( ) ( ) ( ) ( ) ( )f.fSf.fSf OSCHIP211HIP111 Γ+δ=δ .
L’onde mesurée puis corrigée par l’expression écrite ci-dessus est comparée à la mêmeonde simulée (modélisation de la source et de la ligne représentées figure 12). La concordancedes ondes valide la méthode employée.

25
Des investigations ont été faites sur l’utilisation du connecteur de masse de la sondehaute impédance. I l apparaît que des mesures sont très différentes suivant si le plan de masseest utilisé ou pas. Cependant, les formes d’ondes corrigées par les paramètres d’erreurs issusde l’étalonnage de la sonde haute-impédance sont quasi-identiques si les mesures etl’étalonnage se font dans les mêmes configurations (masse utilisée ou pas). On peut doncréaliser des mesures sans connecter la masse de la sonde haute-impédance.
Banc de mesure envisagé autour du LSNA
Utiliser le LSNA avec les sondes haute-impédance permet des structure de banc demesure impossible avec un MTA ou un oscilloscope à échantillonnage : le LSNA dispose de 4canaux indépendants complètement étalonné. On peut donc penser à mesurer de façon absolue3 pseudo-ondes aux accès du dispositif sous test et réserver 1 entrée du « Down-converterBox » pour une sonde haute-impédance.Cependant une limitation apparaît à l’ issue de l’étalonnage du LSNA. En effet, les matricesd’erreurs ne sont pas diagonales. En conséquence, pour avoir par exemple la forme corrigéede l’onde a1, il faut disposer des ondes non-corrigées a1 et b1. Il en va de même pour les ondesa2 et b2.
Néanmoins, une astuce peut être faite en mesurant le coefficient de réflexion présenté par leLSNA dans le plan de référence. Cette mesure ne peut se faire que sur le port 2 (le port 1présentant une source n’est pas une structure passive).La mesure du coefficient de réflexionconduit à une relation entre les ondes a2 DUT
et b2 DUT, soit en considérant la matriced’erreur du port 2, à une relation entre lesondes non-corrigées a2 LSNA et b2 LSNA. LeLSNA peut alors mesurer 3 ondes aux accèsdu quadripôle et déduire la quatrième enlaissant un port du « Down-Converter Box »libre pour la mesure faite avec une sondeHIP. Cette configuration est illustrée figure14. Deux mesures séquentielles doivent alorsêtre réalisée avec la sonde HIP pour endéduire les formes d’ondes.
DST
DOWN-CONVERTER
TEST-SETA1
B1 B2
A2
A1
B1 B2
A2
50ΩΩΩΩ
HIP
a1
b1
a2
b2
DST
DOWN-CONVERTER
TEST-SETA1
B1 B2
A2
A1
B1 B2
A2
DSTDST
DOWN-CONVERTER
TEST-SETA1
B1 B2
A2A1
B1 B2
A2
A1
B1 B2
A2A1
B1 B2
A2
50ΩΩΩΩ
HIP
a1
b1
a2
b2
Fig. 14 - 1ère possibilité de mesure enprésence d’une sonde HIP avec le
LSNA
DST
DOWN-CONVERTER
TEST-SETA1
B1 B2
A2
A1
B1 B2
A2
HIPs
a1
b1
a2
b2
50ΩΩΩΩ
50ΩΩΩΩ
DST
DOWN-CONVERTER
TEST-SETA1
B1 B2
A2
A1
B1 B2
A2
DSTDST
DOWN-CONVERTER
TEST-SETA1
B1 B2
A2A1
B1 B2
A2
A1
B1 B2
A2A1
B1 B2
A2
HIPs
a1
b1
a2
b2
50ΩΩΩΩ50ΩΩΩΩ
50ΩΩΩΩ50ΩΩΩΩ
Fig. 15 - 2nde configurationpossible
Une seconde configuration d’utilisation du LSNA peutêtre envisagée. Elle consiste à utiliser 2 ports du « Down-converter Box » pour les sondes HIP (1 port par sonde, nouspermettant d’avoir les ondes a et b en une seule mesure) et les 2autres ports avec le « test-set » pour mesurer les ondes à unaccès du dispositif sous test. Cette configuration apparaîtnaturelle et ne nécessite pas d’hypothèse comme laconnaissance du coefficient de réflexion du LSNA présentedans la première configuration. Cette deuxième configurationest représentée figure 15. Elle est particulièrement intéressante
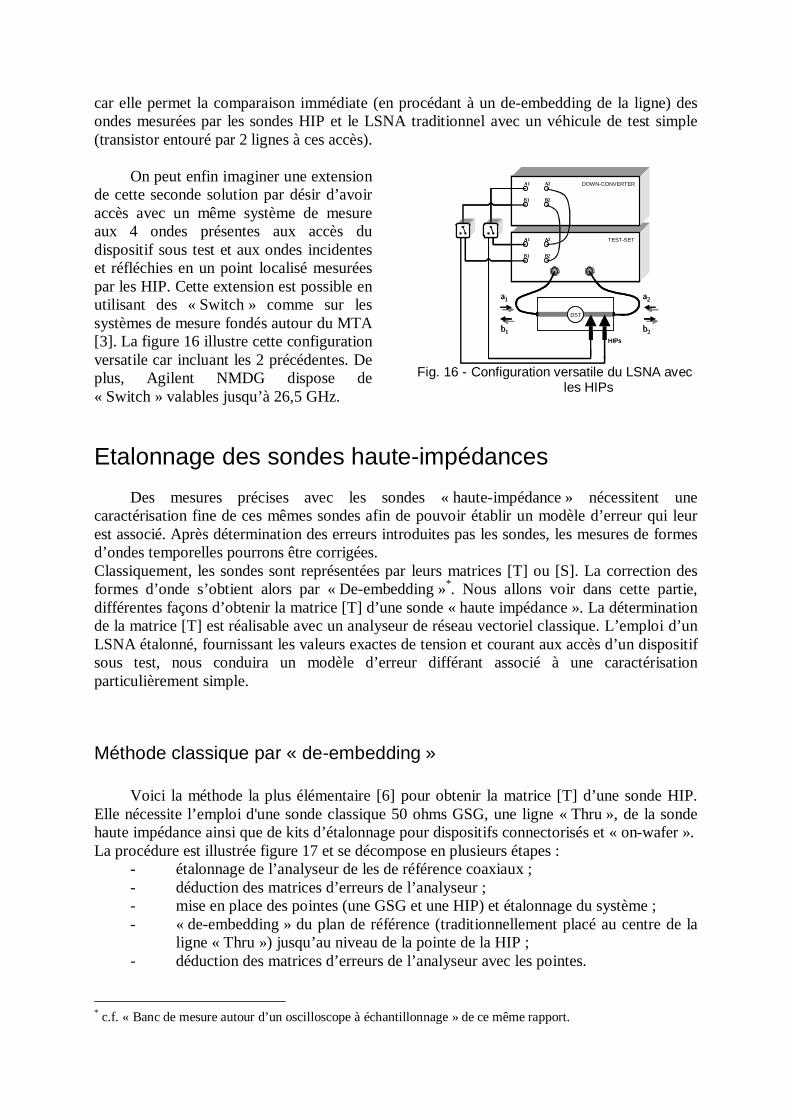
car elle permet la comparaison immédiate (en procédant à un de-embedding de la ligne) desondes mesurées par les sondes HIP et le LSNA traditionnel avec un véhicule de test simple(transistor entouré par 2 lignes à ces accès).
On peut enfin imaginer une extensionde cette seconde solution par désir d’avoiraccès avec un même système de mesureaux 4 ondes présentes aux accès dudispositif sous test et aux ondes incidenteset réfléchies en un point localisé mesuréespar les HIP. Cette extension est possible enutilisant des « Switch » comme sur lessystèmes de mesure fondés autour du MTA[3]. La figure 16 illustre cette configurationversatile car incluant les 2 précédentes. Deplus, Agilent NMDG dispose de« Switch » valables jusqu’à 26,5 GHz.
DST
DOWN-CONVERTER
TEST-SETA1
B1 B2
A2
A1
B1 B2
A2
HIPs
a1
b1
a2
b2
DST
DOWN-CONVERTER
TEST-SETA1
B1 B2
A2
A1
B1 B2
A2
DSTDST
DOWN-CONVERTER
TEST-SETA1
B1 B2
A2A1
B1 B2
A2
A1
B1 B2
A2A1
B1 B2
A2
HIPs
a1
b1
a2
b2
Fig. 16 - Configuration versatile du LSNA avecles HIPs
Etalonnage des sondes haute-impédances
Des mesures précises avec les sondes « haute-impédance » nécessitent unecaractérisation fine de ces mêmes sondes afin de pouvoir établir un modèle d’erreur qui leurest associé. Après détermination des erreurs introduites pas les sondes, les mesures de formesd’ondes temporelles pourrons être corrigées.Classiquement, les sondes sont représentées par leurs matrices [T] ou [S]. La correction desformes d’onde s’obtient alors par « De-embedding »*. Nous allons voir dans cette partie,différentes façons d’obtenir la matrice [T] d’une sonde « haute impédance ». La déterminationde la matrice [T] est réalisable avec un analyseur de réseau vectoriel classique. L’emploi d’unLSNA étalonné, fournissant les valeurs exactes de tension et courant aux accès d’un dispositifsous test, nous conduira un modèle d’erreur différant associé à une caractérisationparticulièrement simple.
Méthode classique par « de-embedding »
Voici la méthode la plus élémentaire [6] pour obtenir la matrice [T] d’une sonde HIP.Elle nécessite l’emploi d'une sonde classique 50 ohms GSG, une ligne « Thru », de la sondehaute impédance ainsi que de kits d’étalonnage pour dispositifs connectorisés et « on-wafer ».La procédure est illustrée figure 17 et se décompose en plusieurs étapes :
- étalonnage de l’analyseur de les de référence coaxiaux ;- déduction des matrices d’erreurs de l’analyseur ;- mise en place des pointes (une GSG et une HIP) et étalonnage du système ;- « de-embedding » du plan de référence (traditionnellement placé au centre de la
ligne « Thru ») jusqu’au niveau de la pointe de la HIP ;- déduction des matrices d’erreurs de l’analyseur avec les pointes.
* c.f. « Banc de mesure autour d’un oscilloscope à échantillonnage » de ce même rapport.

27
HIP
GSGPlan de
référencecoaxial
Ligne « THRU »
Plan deréférencecoaxial
Analyseur de
Réseau Vectoriel
Plan de référence « On-Wafer »initial
Plan de référence « On-Wafer »après « De-embedding »
HIP
GSGPlan de
référencecoaxial
Ligne « THRU »
Plan deréférencecoaxial
Analyseur de
Réseau Vectoriel
Plan de référence « On-Wafer »initial
Plan de référence « On-Wafer »après « De-embedding »
Fig. 17 - Illustration de la détermination de la matrice [T] de la sonde HIP par 2 étalonnages successifset « De-embedding »
On peut alors déduire très facilement la matrice [T] de la HIP car la matrice d’erreur tenantcompte de la sonde HIP correspond à la mise en cascade de la matrice recherchée et de lamatrice d’erreur du même accès en connectorisé.Cette méthode est sûrement celle employée par C.J. Wei pour son banc autour d’un MTA[1][2], mais elle conduit à des résultats imprécis [4] due à la trop forte atténuation de la sondeHIP pour déterminer avec une grande précision les matrices d’erreur.
Une méthode améliorée a été proposée par U. Arz [4]. Elle consiste dans un premier temps àeffectuer les opérations de « de-embedding » décrite ci-dessus mais lors d’étalonnages nefaisant intervenir que des pointes classiques GSG 50Ω. L’usage exclusif de pointes 50Ω lorsdes mesures conduit à des résultats plus précis car moins bruités. On peut alors bénéficier des
matrices de transmission [ ]1GSGT , [ ]2GSGT , [ ]LT correspondant respectivement aux pointes
GSG du port 1,GSG du port 2 et à la ligne de transmission. Plusieurs autres lignes peuventêtre caractérisées avec le système étalonnées et conduire à un ensemble de matrices de
transmission [ ]LxT leurs étant associées.Les hypothèses de la méthode améliorée sont la connaissance de ces matrices de transmission.
Méthode améliorée : étalonnage dans le plan coaxial (SOLT)
Cette méthode (étalonnage dans le plan coaxial) nécessite la connaissance des matrices
[ ]1GSGT et [ ]LxT . Le principe est simple. Après avoir étalonné l’appareil de mesure dans les
plans de référence coaxiaux, on réalise les connexions illustrées figure 18. On peut alors faireune mesure (en présence d’une des x lignes) dont les plans de référence sont les plans
coaxiaux. On obtient alors la matrice [ ]SOLTTotalT . Cette matrice correspond à l’expression
suivante :
[ ] [ ][ ][ ]HIPLx1GSGSOLTTotal T.T.TT =
I l vient alors la matrice transmission de la sonde « haute-impédance » :

28
[ ] [ ][ ][ ] [ ]SOLTTotal
1Lx1GSGHIP T.T.TT −=
Cette procédure peut être répétée pour différents standards pré-caractérisés [ ]LxT , nousconduisant ainsi à une matrice de transmission moyenne de la sonde « haute-impédance ».
HIP
GSGPlan de
référencecoaxial
x Lignes
Plan deréférencecoaxial
[ ]SOLTTotalT
[ ]1GSGT [ ]xLT [ ]HIPT
HIP
GSGPlan de
référencecoaxial
x Lignes
Plan deréférencecoaxial
[ ]SOLTTotalT
[ ]1GSGT [ ]xLT [ ]HIPT
Fig. 18 - Caractérisation de la sonde HIP – Méthode améliorée.
La méthode de caractérisation de la sonde HIP est particulièrement lourde. Elle implique unétalonnage coaxial puis un étalonnage sous pointes afin de déduire les matrices des sondesGSG. Cet étalonnage sous pointes est conservé pour la mesure des lignes standards Lx, mais ànouveau on doit revenir au plan de référence coaxial afin de déduire les coefficients de la
matrice [ ]HIPT . Ce dernier changement de plan de référence peut être évité par un « de-embedding » supplémentaire. Ceci est expliqué dans le paragraphe suivant.
Méthode améliorée : étalonnage dans le plan des sondes (LRRM)
Cette méthode requière la connaissance des matrices [ ]1GSGT , [ ]2GSGT et [ ]LxT . Après
avoir mesuré les lignes standards (matrices [ ]LxT ), la sonde GSG 2 est alors remplacée par lasonde HIP. Les lignes sont à nouveau mesurées (sans changer d’étalonnage ni de plan deréférence qui est alors un plan de référence « virtuel » en ce qui concerne le port 2). Lesmesures effectuées correspondent à l’écriture suivante :
[ ] [ ] [ ] [ ] 12GSG
SOLTTotal
11GSG
LRRMTotal T.T.TT −−=
On peut ainsi revenir à la matrice des mesures considérées dans les plans de référencecoaxiaux telle que :
[ ] [ ][ ][ ]2GSGLRRMTotal1GSG
SOLTTotal T.T.TT =
et ainsi appliquer la méthode améliorée précédente sans avoir préalablement fait unétalonnage dans les plans coaxiaux soit :
[ ] [ ][ ][ ] [ ]SOLTTotal
1Lx1GSGHIP T.T.TT −=
29
Les méthodes qui viennent d’être présentée sont applicables avec un ARV ou un LSNA. Lespotentialités supplémentaires du LSNA sont exploitées dans une méthode supplémentaireparticulièrement facile à mettre en œuvre, et qui fait l’objet du prochain paragraphe.
Notons également qu’ il existe un changement d’ impédance entre les lignes standards et lasonde « haute-impédance ». Ce changement d’ impédance est inclus dans la matricetransmission déduite de la sonde HIP. En conséquence, ce type d’étalonnage n’est valable quelorsque les lignes standards utilisées sont semblables aux lignes qui seront mesuréesultérieurement sur MMIC.
Méthode supplémentaire envisagée avec le LSNA
En utilisant le fait que le LSNA est capable de mesurer de façon absolue, aux accès d’undispositif sous test, les pseudo-ondes (ou tensions et courants), l’étalonnage des sondes« haute-impédances » est extrêmement simplifié et ne nécessite aucune déconnexion sur lesystème de mesure.
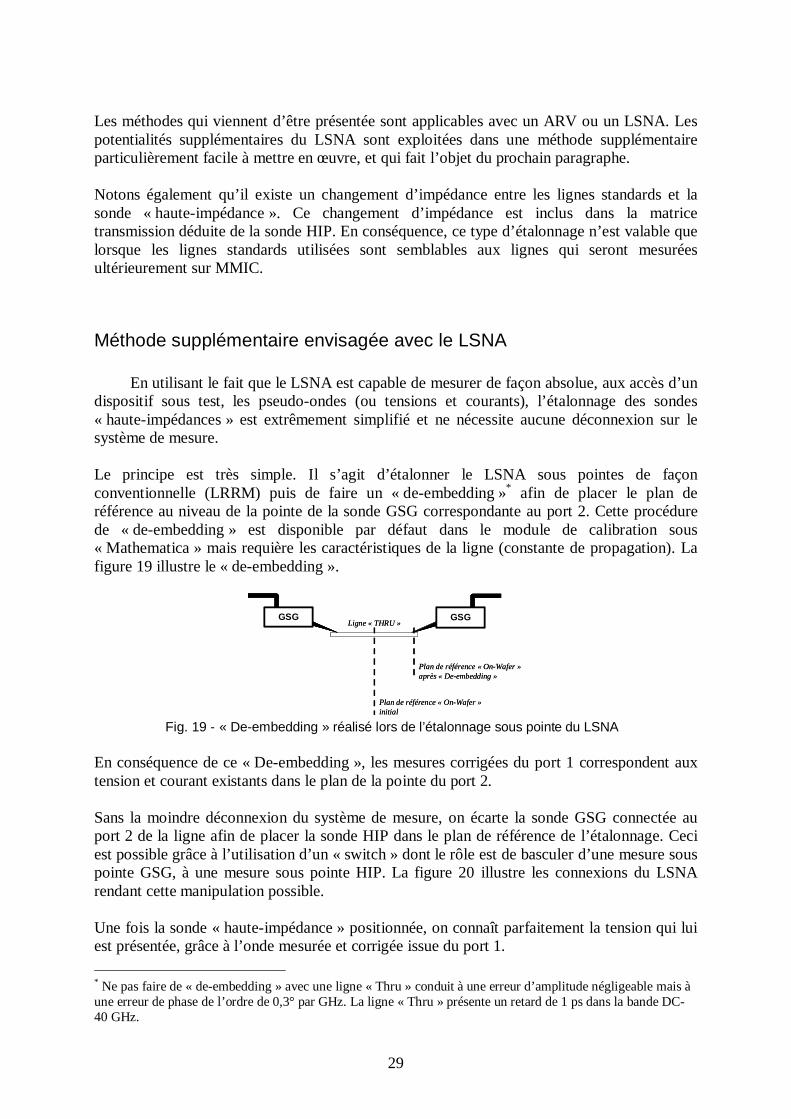
Le principe est très simple. I l s’agit d’étalonner le LSNA sous pointes de façonconventionnelle (LRRM) puis de faire un « de-embedding »* afin de placer le plan deréférence au niveau de la pointe de la sonde GSG correspondante au port 2. Cette procédurede « de-embedding » est disponible par défaut dans le module de calibration sous« Mathematica » mais requière les caractéristiques de la ligne (constante de propagation). Lafigure 19 illustre le « de-embedding ».
GSGGSGLigne « THRU »
Plan de référence « On-Wafer »initial
Plan de référence « On-Wafer »après « De-embedding »
GSGGSGGSGGSGLigne « THRU »
Plan de référence « On-Wafer »initial
Plan de référence « On-Wafer »après « De-embedding »
Fig. 19 - « De-embedding » réalisé lors de l’étalonnage sous pointe du LSNA
En conséquence de ce « De-embedding », les mesures corrigées du port 1 correspondent auxtension et courant existants dans le plan de la pointe du port 2.
Sans la moindre déconnexion du système de mesure, on écarte la sonde GSG connectée auport 2 de la ligne afin de placer la sonde HIP dans le plan de référence de l’étalonnage. Ceciest possible grâce à l’utilisation d’un « switch » dont le rôle est de basculer d’une mesure souspointe GSG, à une mesure sous pointe HIP. La figure 20 illustre les connexions du LSNArendant cette manipulation possible.
Une fois la sonde « haute-impédance » positionnée, on connaît parfaitement la tension qui luiest présentée, grâce à l’onde mesurée et corrigée issue du port 1.
* Ne pas faire de « de-embedding » avec une ligne « Thru » conduit à une erreur d’amplitude négligeable mais àune erreur de phase de l’ordre de 0,3° par GHz. La ligne « Thru » présente un retard de 1 ps dans la bande DC-40 GHz.
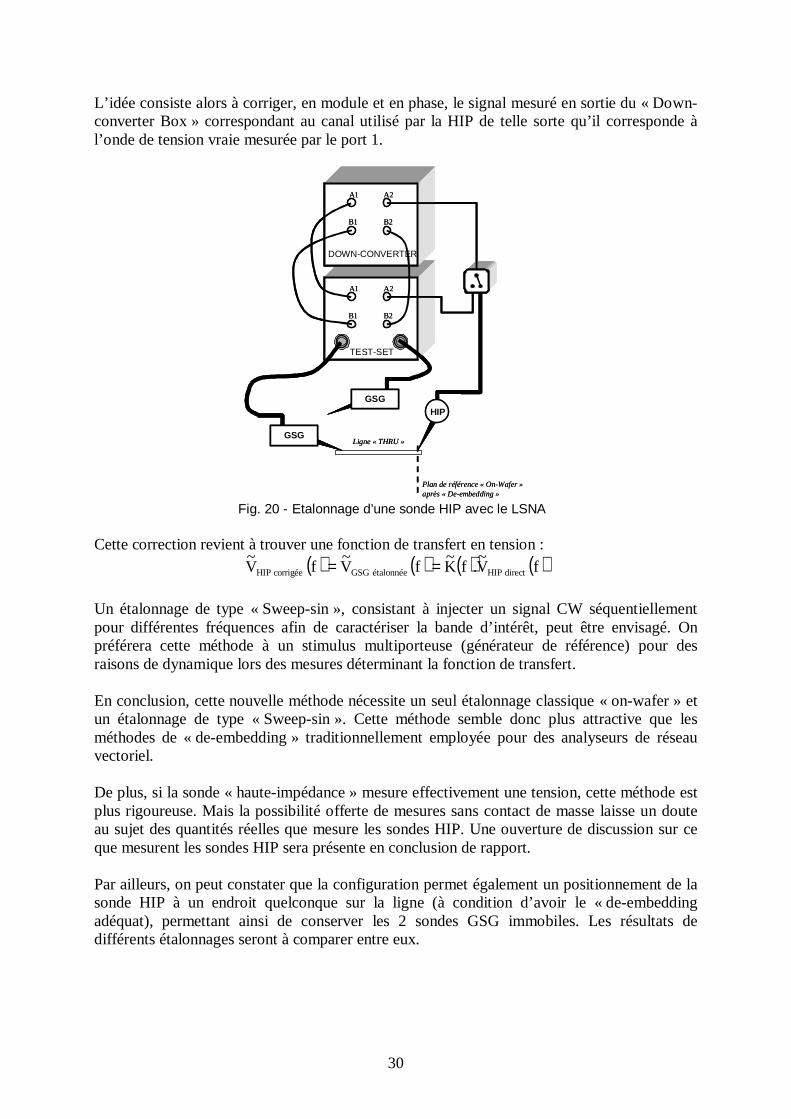
30
L’ idée consiste alors à corriger, en module et en phase, le signal mesuré en sortie du « Down-converter Box » correspondant au canal utilisé par la HIP de telle sorte qu’ il corresponde àl’onde de tension vraie mesurée par le port 1.
DOWN-CONVERTER
TEST-SET
A1
B1 B2
A2
A1
B1 B2
A2
HIP
GSGLigne « THRU »
Plan de référence « On-Wafer »après « De-embedding »
GSG
DOWN-CONVERTER
TEST-SET
A1
B1 B2
A2A1
B1 B2
A2
A1
B1 B2
A2A1
B1 B2
A2
HIP
GSGGSGLigne « THRU »
Plan de référence « On-Wafer »après « De-embedding »
GSGGSG
Fig. 20 - Etalonnage d’une sonde HIP avec le LSNA
Cette correction revient à trouver une fonction de transfert en tension :( ) ( ) ( ) ( )fV
~.fK
~fV
~fV
~directHIPétalonnéeGSGcorrigéeHIP ==
Un étalonnage de type « Sweep-sin », consistant à injecter un signal CW séquentiellementpour différentes fréquences afin de caractériser la bande d’ intérêt, peut être envisagé. Onpréférera cette méthode à un stimulus multiporteuse (générateur de référence) pour desraisons de dynamique lors des mesures déterminant la fonction de transfert.
En conclusion, cette nouvelle méthode nécessite un seul étalonnage classique « on-wafer » etun étalonnage de type « Sweep-sin ». Cette méthode semble donc plus attractive que lesméthodes de « de-embedding » traditionnellement employée pour des analyseurs de réseauvectoriel.
De plus, si la sonde « haute-impédance » mesure effectivement une tension, cette méthode estplus rigoureuse. Mais la possibilité offerte de mesures sans contact de masse laisse un douteau sujet des quantités réelles que mesure les sondes HIP. Une ouverture de discussion sur ceque mesurent les sondes HIP sera présente en conclusion de rapport.
Par ailleurs, on peut constater que la configuration permet également un positionnement de lasonde HIP à un endroit quelconque sur la ligne (à condition d’avoir le « de-embeddingadéquat), permettant ainsi de conserver les 2 sondes GSG immobiles. Les résultats dedifférents étalonnages seront à comparer entre eux.

31
CARACTERISATION DES LIGNES DEPROPAGATIONS
Nous avons pu constater jusqu’à présent que la détermination des ondes de tension et decourant en un point localisé d’un circuit MMIC est une opération totalement réalisable.Cependant ces mesures nécessitent, une connaissance des paramètres essentiels des lignessondées par les pointes « haute-impédances ». Ces paramètres sont, pour le mode depropagation considéré, la constante de propagation (γ) et l’ impédance caractéristique (Z0).
Une bonne méthode pour trouver les valeurs de ces paramètres, consiste à faire une simulationelectro-magnétique sur des structures identiques à celles mesurées.Une autre approche consiste à mesurer ces lignes afin d’en déduire les paramètres essentielsque sont γ et Z0.
Cette 3ème et dernière partie du présent rapport traite donc des méthodes possibles conduisantà la caractérisation d’une ligne.Une méthode simple basée sur la mesure des paramètres [S] de la structure est proposée, suiteà quoi différentes méthodes présentées dans la littératures seront énumérées. Le sujet, trèslargement présent dans de très nombreuses publications, n’a semble t’ il pas de solution simpleet pratique à proposer. Les méthodes montrées dans ce chapitre ne constituent absolument pasune base exhaustive : l’étude bibliographique de cette thématique étant en cours au momentde la rédaction de ce rapport.
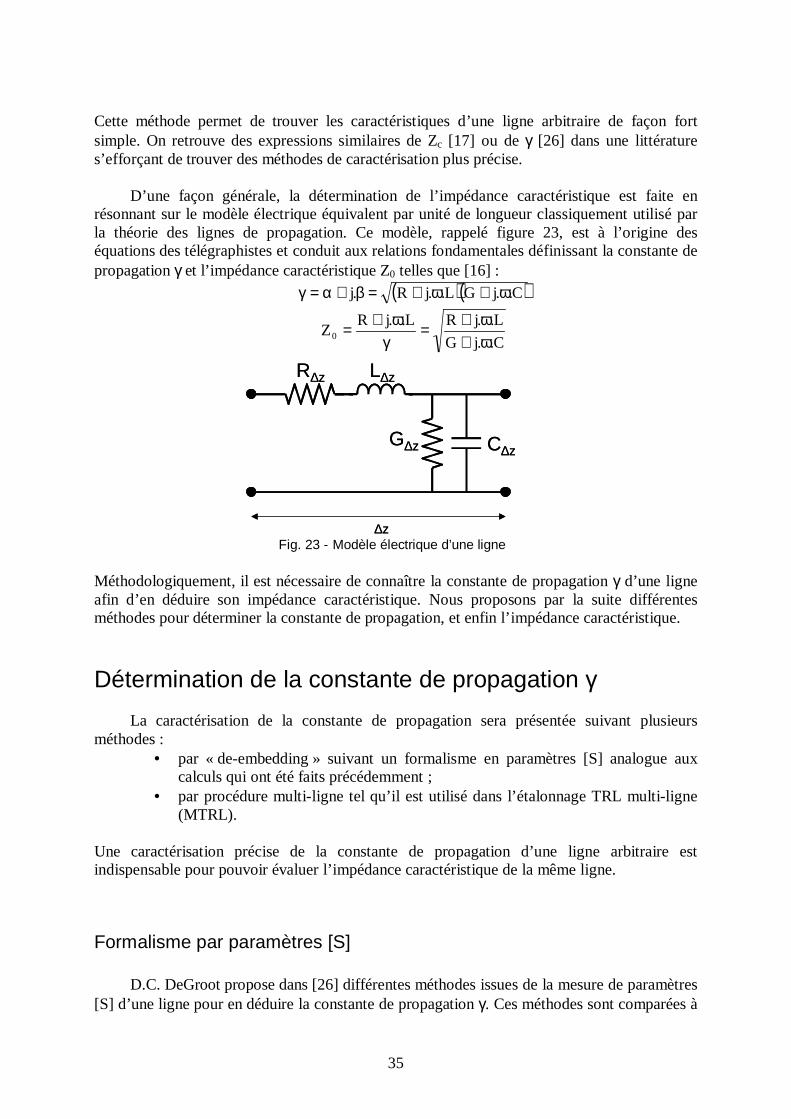
Formalisme théorique utilisé : la transformationd’impédance par matrices [T].
A nouveau, quelques notions élémentaires sont présentées afin de permettre une pluslarge compréhension dans la suite du chapitre. Il s’agit du formalisme des matrices [T]traduisant un changement d’ impédance de référence. Cette matrice de transmission traduitphysiquement la discontinuité dans l’expression de l’ impédance de référence.Ces notions ont été décrites par Marks et Williams dans [16]. Elles ont étés démontrées enémettant l’ hypothèse que la tension V et le courant I sont CONTINUS à l’ interface des 2milieux.
Définition de la matrice [Qnm]

32
La matrice transfert de la transformation d’ impédance utilise le formalisme des pseudo-ondes. Elle supporte donc des impédances de référence complexes. On rappelle que lespseudo-ondes sont des fonctions de l’ impédance de référence.Considérons 2 milieux (guides coplanaires par exemple) en contact et d’ impédances deréférence respectives n
REFZ et mREFZ En considérant la continuité des courant et tension à
l’ interface, la relation entre les pseudo-ondes est, en correspondance avec la figure 21, lasuivante :
( )( ) [ ] ( )
( )
=
mREF
mREFnm
nREF
nREF
Zb
Za.Q
Zb
Za
[ ]nmQ traduit le changement d’ impédance de référence passant de nREFZ à m
REFZ dans le sensde la transmission (cascade).
Discontinuité
nREFZ m
REFZ
( )nREFZa
( )nREFZb
( )mREFZa
( )mREFZb
Discontinuité
nREFZ m
REFZ
( )nREFZa
( )nREFZb
( )mREFZa
( )mREFZb
Fig. 21 - Illustration de la transformation d’impédance avec les pseudo-ondes a et b
L’expression matricielle de [ ]nmQ est :
[ ]
ΓΓ
Γ−
ℜℑ
−
ℜℑ−
=1
1.
1
1.
Ze
Zm.j1
Ze
Zm.j1
Qnm
nm
2nm
nREF
nREF
mREF
mREF
nm avec nREF
mREF
nREF
mREF
nmZZ
ZZ
+−
=Γ
Propriétés
De l’expression précédente, on peut la relation liants les coefficients de réflexion enpseudo-ondes :
( ) ( )( )m
REFnm
mREFnmn
REFZ.1
ZZ
ΓΓ+Γ+Γ
=Γ
On peut alors signaler quelques propriétés intéressantes entre les coefficients de réflexionsprésentés respectivement en m
REFZ et nREFZ :
si ( ) 0ZmREF =Γ , alors ( ) nm
nREFZ Γ=Γ ;
si ( ) nmmREFZ Γ−=Γ , alors ( ) 0Zn
REF =Γ ;

33
si ( ) 1ZmREF +=Γ , alors ( ) 1Zn
REF +=Γ ;
si ( ) 1ZmREF −=Γ , alors ( ) 1Zn
REF −=Γ .
I l apparaît que les transformations d’ impédance n’ont aucune influence sur les court-circuit etcircuit ouvert.
Par ailleurs, notons que :
[ ] [ ] [ ]npmpnm QQ.Q = ; [ ] IQnn = (matrice identité) ; [ ] [ ]mn1nm QQ =−
Cas particulier utile
Considérons un quadripôle dont la matrice [T] est parfaitement connue lorsque
l’ impédance de référence est mREFZ . Cette matrice est notée [ ]mmT . Quelle est la matrice [T] de
ce même quadripôle obtenue par une mesure avec un appareil utilisant une autre impédancede référence p
REFZ ?
pREFZ m
REFZ pREFZ
[ ]mmT
[ ]ppT
pREFZ m
REFZ pREFZ
[ ]mmT
[ ]ppT Fig. 22 - Présentation du problème : changement d’impédance de référence – influence sur la matrice
[T] du quadripôle.
En utilisant le formalisme des matrices de transformation d’ impédance cascadable, la réponseest élémentaire :
[ ] [ ][ ][ ] [ ]
Γ−Γ−
Γ
ΓΓ−
==1
1.T.
1
1.
1
1Q.T.QT
pm
pmmm
pm
pm
2pm
mpmmpmpp
C’est grâce à cette relation que nous allons tenter de déterminer l’ impédance caractéristique etla constante de propagation d’une ligne à partir des mesures de ses paramètres [S].
Caractériser une ligne par sa matrice [S]
Les paramètres [S] d’une ligne doivent théoriquement s’exprimer en fonction de sonimpédance caractéristique et de sa constante de propagation. Bien qu’une ligne soit réciproque(S11=S22 et S12=S21), on doit aboutir pour chaque fréquence à un système de 2 équationscomplexes (module et phase du paramètre [S]) à 2 inconnues complexes (l’ impédancecaractéristique pas forcément réelle et ( ) ( ) ( )ωβ+ωα=ωγ .j ) Les mesures de paramètres [S] se
faisant dans un environnement Z0=50Ω, on peut se demander quelle est la matrice [S](50Ω)
(référencée par rapport à 50 ohms) d’une ligne quelconque (γ , Zc).

34
Pour répondre à cette question, considérons une ligne quelconque de constante de propagationγ, et d’ impédance caractéristique Zc. La matrice [T] de cette ligne référencée par rapport à sapropre impédance caractéristique Zc s’écrit :
( )
=γ+
γ−
l.
l.Z
lignee0
0eT c .
Son expression dans un environnement référence par rapport à une impédance Z0
(classiquement 50Ω) s’écrit :
( ) [ ] [ ]co
l.
l.ocZ
ligne Q.e0
0e.QT 0
=
γ+
γ−
;
soit :
( ) ( )( )
Γ−Γ−Γ−Γ−
Γ−= γ−γ−
γ−γ−γ+
2oc
l.2oc
l.2oc
l.22oc
l.2
2oc
l.Z
ligne.e1.1e
.e1e.
1
eT 0 avec
0c
0coc ZZ
ZZ
+−
=Γ
Cette expression, utilisée pour les étalonnages [27] peut être trouvée par transformationsmultiples entre matrice [Z] et [S] assez fastidieuse. L’utilisation des matrices trans-impédanceen est donc d’autant plus justifiée.
La matrice [S] qui lui est associée, correspond à une mesure d’une ligne arbitraire (γ , Zc)fournie par un appareil dont les ports sont des lignes d’ impédance caractéristique Z0.
[ ]( ) ( )
( ) ( )
Γ−Γ−
Γ−Γ−
Γ−Γ−
Γ−Γ−
=
γ
γ
γ
γ
γ
γ
γ
γ
2oc
l.2oc
l.2
2oc
l.2
2oc
l.
2oc
l.2
2oc
l.
2oc
l.2oc
l.2
e
.1e
e
1.ee
1.e
e
.1e
S
La matrice étant symétrique, on ne considère que les termes S11 et S21 afin de déduire lesexpressions complexes Zc et γ. La résolution du système nous amène à 2 couples desolutions possibles:
( )( )
( )
−+−++−=
−−−+
=
γ
21
221
2221
211
221
211l.
221
211
221
211
0c
S.2
S.4SS1SS1e
SS1
SS1.ZZ
;
( )( )
( )
−+−++−−=
−−−+
−=
γ
21
221
2221
211
221
211l.
221
211
221
211
0c
S.2
S.4SS1SS1e
SS1
SS1.ZZ
Le bon couple de solution peut s’obtenir facilement en calculant numériquement les valeursde Zc et en éliminant celle dont la partie réelle est négative (pas d’ interprétation physique).
Le couple de valeur étant définit, γ admet toujours plusieurs solutions. Son calcul faitintervenir un logarithme népérien d’un nombre complexe, ce qui conduit à une infinité desolutions*.
* Soit ϕ= .je.Az , alors ( ) [ ]π+ϕ+= .k.2.j)Aln(zln
35
Cette méthode permet de trouver les caractéristiques d’une ligne arbitraire de façon fortsimple. On retrouve des expressions similaires de Zc [17] ou de γ [26] dans une littératures’efforçant de trouver des méthodes de caractérisation plus précise.
D’une façon générale, la détermination de l’ impédance caractéristique est faite enrésonnant sur le modèle électrique équivalent par unité de longueur classiquement utilisé parla théorie des lignes de propagation. Ce modèle, rappelé figure 23, est à l’origine deséquations des télégraphistes et conduit aux relations fondamentales définissant la constante depropagation γ et l’ impédance caractéristique Z0 telles que [16] :
( )( )C..jGL..jR.j ω+ω+=β+α=γ
C..jG
L..jRL..jRZ0 ω+
ω+=γ
ω+=
C∆zG∆z
L∆zR∆z
∆z
C∆zG∆z
L∆zR∆z
∆z Fig. 23 - Modèle électrique d’une ligne
Méthodologiquement, il est nécessaire de connaître la constante de propagation γ d’une ligneafin d’en déduire son impédance caractéristique. Nous proposons par la suite différentesméthodes pour déterminer la constante de propagation, et enfin l’ impédance caractéristique.
Détermination de la constante de propagation γLa caractérisation de la constante de propagation sera présentée suivant plusieurs
méthodes :• par « de-embedding » suivant un formalisme en paramètres [S] analogue aux
calculs qui ont été faits précédemment ;• par procédure multi-ligne tel qu’ il est utilisé dans l’étalonnage TRL multi-ligne
(MTRL).
Une caractérisation précise de la constante de propagation d’une ligne arbitraire estindispensable pour pouvoir évaluer l’ impédance caractéristique de la même ligne.
Formalisme par paramètres [S]
D.C. DeGroot propose dans [26] différentes méthodes issues de la mesure de paramètres[S] d’une ligne pour en déduire la constante de propagation γ. Ces méthodes sont comparées à

36
la méthode conventionnellement utilisée par le NIST : le multi-line. I l apparaît que ladésadaptation entre l’appareil de mesure et la ligne produit une erreur systématique sur lesrésultats obtenus pour γ lorsqu’on applique les méthodes par paramètres [S].
D.C. DeGroot considère la structure simple (une ligne mesurée avec 2 pointes classiquesGSG) illustré par le schéma équivalent figure 24. Il utilise la relation suivante :
21
L..222
21L.
t
e.r1.Se
γ−γ− −
= où 222222 BAr = et 122121 BAt = .
a1
b1
a2
b2
L.e γ−
L.e γ−
11A 22A
21A
12A
11B22B
21B
12Ba1
b1
a2
b2
L.e γ−
L.e γ−
11A 22A
21A
12A
11B22B
21B
12B
Fig. 24 - Modèles d’erreur entre les ondes mesurées et la ligne
Les termes Aij et Bij sont des boites d’erreur qui caractérisent non seulement le changementd’ impédance mais aussi les contacts de pointes (ou connecteurs si on considère une ligneconnectorisée) non-idéaux. Le modèle d’erreur est bien plus général qu’une simple matricetrans-impédance. I l apparaît que cette formulation est analogue aux résultats obtenus dans leparagraphe sur la caractérisation d’une ligne en paramètre [S] lorsque les quadripôles A et Bsont sans pertes. En effet dans ce cas, il vient :
• co2222 AB Γ== d’où 2oc2222 B.A Γ= ;
• oc1111 AB Γ== d’où ( ) ( )
( ) ( ) ( ) Γ+=Γ−=−=
Γ−=−=
occo2212
oc1121
11B1B
1A1A ;
et donc les expressions du S21 sont similaires :( ) ( )
L.22oc
2oc
L.
L.22222
1221L.
L.222
21L.
21e.1
1.e
e.B.A1
B.A.e
e.r1
t.eS γ−
γ−
γ−
γ−
γ−
γ−
Γ−Γ−
=−
=−
=
En ce qui concerne la détermination de la constante de propagation γ, 3 possibilités sont àpartir de l’expression de D.C. DeGroot :
• Disposer d’un système de mesure calibré, respectant les conditions d’adaptation entrel’appareil de mesure et la ligne (i.e ZREF=Zc : comme pour les pseudo-ondes) etdisposer de contacts idéaux. Alors r22 tend vers 0 et t11 vers 1. La constante depropagation est directement déductible du S21 mesuré.
• Faire un rapport entre 2 résultats de mesures réalisées avec des lignes de différenteslongueurs. Cela permet d’éliminer le terme d’erreur en transmission t21 et ne nécessiteque le terme d’erreur en réflexion r22. Cette expression est donc mesurable avec unsystème non-étalonné. On a ainsi :
1
2
1
2
L..222
L..222
L21
L21L.
e.r1
e.r1.
S
Se γ−
γ−∆γ−
−−
= avec 12 LLL −=∆
• Faire un rapport entre 2 résultats avec un système étalonné. On connaît alors le termed’erreur en réflexion (r22), et on peut en déduire γ.

37
Les résultats obtenus sont comparés avec la détermination de γ par multi-line. Les mesuresont été faites sur 2 lignes AsGa d’environ 50 et 70 ohms. Même si les résultats obtenus parmulti-line sont bien meilleurs, la détermination de γ par une mesure en [S] reste une bonneapproximation au-delà de 2 GHz.
Formalisme par lignes multiples (MTRL)
La détermination de la constante de propagation grâce à des lignes de caractéristiquesidentiques mais de longueurs différentes est la première étape de l’étalonnage MTRL [7].Cette méthode ne nécessite pas l’usage d’un appareil de mesure étalonné, on peut doncraisonner avec des formes d’ondes non-corrigées [23].La détermination de γ est complètement indépendante de ZREF (impédance de référence del’appareil de mesure) et de Zc (impédance caractéristique de la ligne mesurée).Le formalisme est expliqué, par mesure de simplification, en ne considérant que 2 lignes.
Considérons 2 lignes, i et j, strictement identiques hormis leurs longueurs (avec lj>li).Ces lignes sont mesurée avec un appareil (type ARV) non-étalonné. En convertissant lesmesures en matrices [T], on a :
==
Y.T.XM
Y.T.XMjj
ii
avec
= γ+
γ−
i
i
l.
l.i
e0
0eT et
= γ+
γ−
j
j
l.
l.j
e0
0eT
Les matrices X et Y correspondent aux matrices d’erreurs de l’appareil de mesure. Cesmatrices sont inconnues car l’appareil n’est pas calibré. Les matrices M sont les mesures noncorrigées des lignes i et j.
On pose les formulations suivantes afin de faire apparaître une longueur différentielle de ligne(lj-li) :
[ ] 1ijij T.TT−
= et [ ] 1ijij M.MM−
=I l apparaît, en calculant Mij, l’égalité suivante :
ijij T.XX.M =Bien que les matrices Mij et Tij soient différents, elles ont, d’après l’égalité ci-dessus, lesmêmes valeurs propres. De plus il se trouve que Tij est une matrice diagonale. Sescomposantes sont donc ses valeurs propres.
( )( )
= −γ+
−γ−
ij
ij
ll
llij
e0
0eT d’où les valeurs propres ( )ij llT
1 e −γ=λ et ( )ij llT2 e −γ−=λ
On a alors 2 solutions possibles pour γ :
( )( )ij
T1
1 ll
ln
−λ=γ et ( )ij
T2
2 ll
1ln
−
λ=γ
La solution utilisée est la moyenne arithmétique des solutions précédentes, soit :
( )( )ij
ij
ll
ln
−λ=γ avec
λ
+λ=λT2
T1
ij 1
2
1

38
Comme nous l’avons dit, les valeurs propres de la matrice M ij sont celles de Tij. Ces valeurssont analytiquement les suivantes :
( ) ( )2
M.M.4MMMM ij21
ij12
2ij22
ij11
ij22
ij11M
2,1
++±+=λ
I l demeure néanmoins une incertitude de taille : on ne sait pas si T1λ (et donc T
2λ ) correspond àM1λ ou à M
2λ .
Pour résoudre cette incertitude, il faut calculer les deux γ possibles et prendre la solution laplus probable.Si, par exemple, une des solutions présente une partie réelle (α) négative, elle peut êtreécartée car non physique. Mais que choisir lorsqu’on hésite entre 2 valeurs physiquementpossibles ?
L’article [24] de D.C. DeGroot répond à la question en révélant l’étalonnage du NIST. Endémarrant un étalonnage MTRL, l’utilisateur est prié de rentré une estimation de la constantediélectrique effective des lignes utilisées ( effrε ) à 1 GHz.
Suite au calcul des valeurs propres, c’est la solution la plus proche de l’estimation qui seraconservée.
Conclusion
Plusieurs méthodes pour la détermination de la constante de propagation d’une lignearbitraire ont été présentées. La méthode, basée sur la mesure de la matrice [S] d’une ligneavec un appareil étalonné est facile à mettre en place et ne nécessite qu’une seule ligne, maissemble fournir des résultats moins performants que la caractérisation utilisée dans le MTRL(qui requière un minimum de 2 lignes).
Néanmoins, des expérimentations de chacune de ces méthodes sont envisagées sur le kitd’étalonnage « multi-line » PCB (connectorisé) d’Agilent NMDG, ainsi que sur des lignes detransmissions connectorisées fournies par l’ IRCOM. En ce qui concerne les lignes envoyéespar l’ IRCOM, compte tenu qu’elles ont la même longueur, on comparera la méthode desparamètres [S] à un « multi-line » fait avec une seule ligne (i.e. l1=0 et l2=L).
Détermination de l’impédance caractéristique Z0
Afin de pouvoir fournir les ondes de tension et de courants circulants au cœur d’unMMIC, il est nécessaire d’avoir la constante de propagation mais également l’ impédancecaractéristique de la ligne sondée. L’ impédance caractéristique est généralement déduite desrelations la liant à la constante de propagation. Cette dernière étant supposée connue, nousintroduiront quelles méthodes de caractérisation de l’ impédance caractéristique.

39
Formalisme par paramètres [S]
En raisonnant à partir des paramètres [S] d’une ligne d’ impédance caractéristique Z0 mesurésau moyen d’un appareil d’ impédance caractéristique ZREF :
( )( ) 2
212
11
221
211
REF0SS1
SS1.ZZ
−−−+
=
Les résultats obtenus par cette formulation ont été comparés une autre méthode (toujours surles bases d’un étalonnage MTRL) par Williams et Marks [17]. La relation obtenue parparamètre [S] apparaît comme une approximation incertaine, car les discontinuités quiexistent au niveau des connexions de la ligne à caractériser ne peuvent pas être décrites par unsimple changement d’ impédance. C’est pourquoi, des méthodes plus rigoureuses, associé aucircuit équivalent d’une ligne (figure 23) ont été développée pour déterminer Z0.
Les principales relations amenant à la détermination de Z0 à partir de la connaissance de γsont [13] [14] [17] :
γ=+ω
γ=+ω
0
0
Z.RL..jZ
GC..j
Hypothèse d’une ligne à faibles pertes (substrat GaAs)
Trouver Z0 :
Une première méthode [13] consiste à émettre quelques hypothèses restrictives à partirdes équations écrites ci-dessus. I l apparaît que pour des lignes à faibles pertes et dispersions(cas des substrats GaAs), on peut négliger la conductance par unité de longueur (G ≅ 0) et la
capacitance ne dépend pas de la fréquence ( 0f
C =∂∂
d’où C = C0 = constante). On peut alors
déterminer très simplement l’ impédance caractéristique grâce à la relation : 0Z
GC..jγ=+ω .
L’autre relation, faisant intervenir les termes de résistance et d’ inductance par unité delongueur ( 0Z.RL..j γ=+ω ) n’est pas utilisable pour la détermination de Z0 car R et L
dépendent très fortement de la fréquence. Par contre elle permet d’établir le modèle électriquede la ligne mesurée.
Les hypothèses utilisées pour la détermination de Z0 sont celles de la procédure d’étalonnageMTRL pour déduite l’ impédance des lignes étalon en GaAs.

40
CG
LR
MESUREDE
LIGNESγ Z0
Hypothèses
mFcsteCC
mS0G
0 =≈≈
00 C..j
Zω
γ=CG
LR
CG
LR
MESUREDE
LIGNESγ Z0
Hypothèses
mFcsteCC
mS0G
0 =≈≈
00 C..j
Zω
γ=
Fig. 25 - Hypothèses et principe de la caractérisation des lignes par MTRLTrouver C0 :
I l faut donc pouvoir mesurer la capacitance linéique afin de déduire Z0.
Cette mesure est possible sur des lignes très grandes avec un capacimètre conventionnel. Lacapacitance linéique étant alors la valeur mesurée divisée par la longueur de la ligne. Cetteprocédure est employée sur le kit d’étalonnage multiline en PCB connectorisé d’AgilentNMDG (la ligne de plus grande taille fait près de 10 cm !!!) mais n’est pas réalisable « on-wafer » : compte tenu des longueurs de lignes, un capacimètre conventionnel resterais dansl’ incertitude.
Williams et Marks [14] proposent 2 solutions pour déterminer C0.
La première solution repose sur le fait que
ω
γℜ=+.j
eLGRC2
et que LGRC <<
(puisque G est négligeable). En émettant alors l’hypothèse que R est à peu près la résistance
linéique mesurable en DC, on peut établir que
ω
γℜ≈.j
e.R
1C
2
DC
. Il faut faire attention à
cette formulation : l’hypothèse d’une résistance linéique semblable à celle présentée aucontinu est une approximation utilisable qu’en basse fréquence car elle conduit à une
dépendance fréquentielle de C. De plus, la relation 0f
R =∂∂
s’est avérée expérimentalement
fausse, même à très basse fréquence.Il faut ajouter à cela que le LSNA ne peut pas mesurer de fréquence inférieure à 600 MHz(minimum possible pour le fondamental). S’ il permet la mesure de γ pour une fréquence de600 MHz, l’emploi de la méthode décrite ici est possible par l’emploi d’une hypothèsecontredite par [14] : MHz600DC RR ≈ .
La seconde solution est plus complexe à mettre en œuvre, elle nécessite de placer dansla ligne, une résistance localisé parfaitement connue. Par mesure du coefficient de réflexionde cette ligne transformée, on peut déduire C.
Les relations décrites ici sont valables pour l’hypothèse de ligne à faibles pertes etdispersions. Ces techniques sont inutilisables pour des substrats en silicium, par exemple, oùle formalisme par mesures de paramètres [S] est longtemps resté la seule alternative.

41
Lignes à pertes (substrat Si)
Des techniques de caractérisation de lignes présentant des pertes sont référencées dans lalittérature. Les principes utilisés (assez complexes) vont être présentés très sommairement.Ces méthodes considèrent une dépendance fréquentielle de C et une prise en compte de G,dépendant de la fréquence également.
Une première technique a été présentée par Williams et Marks [17]. Elles consistent àdisposer de 2 kits d’étalonnage MTRL : un parfaitement connu (Z0) et l’autre d’ impédancecaractéristique inconnue. Deux étalonnages sont alors fait. Suite chaque étalonnage réaliséavec un kit, on mesure les lignes de l’autre kit d’étalonnage. On dispose alors desuffisamment d’ information pour connaître les caractéristiques du kit inconnu. Le procédéutilisé analyse les matrices d’erreurs générées par les étalonnages et les compares entre elles.Des résultats significatifs de cette méthode ont été présentés dans [20].
Une autre technique, présenté par T.M. Winkel et Al. [25] consiste à élaborer un modèlecircuit très précis des contacts de pointes (ou connecteurs) et de soustraire les parasites ainsimodélisés aux mesures. Cette procédure nécessite de nombreuse supplémentaires à lapremière méthode.
Les deux méthodes offrent des résultats similaires [21] et dévoilent le manque de précision dela méthode « simpliste » fondée autour de la mesures de paramètres [S] de la ligne mesurée.
Lignes Multi-modes
Enfin, il existe des travaux sur des modèles multi-mode des lignes de propagation [18] [19].Cette hypothèse ne répond plus au principe de mesure avec les sondes « haute-impédante »qui supposent que l’on soit dans un mono-mode transverse quasi-TEM.
42
CONCLUSION
Le principe de mesure de formes d’ondes temporelles au moyen de sondes « haute-impédance » couplées au système LSNA d’Agilent NMDG a été présenté. Une configurationspécifique du LSNA avec des « switch » supplémentaire s’ impose comme une configurationparticulièrement versatile tant pour les mesures que pour l’étalonnage des sondes HIP.Les dispositions du LSNA à mesurer des formes d’ondes absolues ont permis d’ imaginer unformalisme d’étalonnage des sondes bien plus simple à mettre en place que les méthodesconventionnelles de « de-embedding ».
Le principe de déduction des formes d’ondes incidente et réfléchie en un point d’un circuitMMIC à partir de 2 mesures séquentielles de la tension sur les lignes sondées a été détaillé.Ce principe nécessite la connaissance des caractéristiques principales de la ligne sondée. Cescaractéristiques peuvent être obtenues par simulation electro-magnétique de la structure. Ellespeuvent néanmoins être caractérisées, a condition que le fondeur mette des lignes équivalentesà disposition de façon indépendante du MMIC.
La grande interrogation qui persiste en cette fin de rapport est la nature des quantités mesuréespar la sonde « haute-impédance ». A priori, cette sonde se présente comme une sondetraditionnelle d’oscilloscope basse fréquence : elle mesurerait une tension. Cependant, laconnexion à un plan de masse n’est pas nécessaire. Ce n’est donc pas une tension qui estmesurée mais une charge (auquel cas, la soit disant tension obtenue en sortie de sonde dépendde l’ impédance caractéristique de la ligne sondée) ou encore une partie du champ électrique.S’ il s’agit d’une mesure du champ électrique, on peut alors s’ interroger sur la nécessité d’uncontact perturbateur sur la ligne sondée [36].I l sera donc fortement intéressant de mesurer des formes d’ondes sur de simple ligne,présentant des impédances caractéristiques différentes, afin de constater la fiabilité desmesures et de l’étalonnage présenté dans ce rapport.
Enfin, la mesure avec les sondes « haute-impédances » implique que les signaux ne sepropagent que suivant un seul mode transverse. Si cette condition n’est pas vraie, on ne peutpas mesurer le véritable champ électrique avec ce type d’appareil. La seule alternative seraitalors des systèmes electro-optique [37] particulièrement coûteux, complexe et encombrants.

43
BIBLIOGRAPHIE
[1] C.J.Wei, Y.A. Tkachenko and J.C.M.Hwang, “Non-invasive waveform probing fornonlinear network analysis” , IEEE MTT-S Digest 1993
[2] C.J. Wei, Y.A. Tkachenko, J.C.M. Hwang, K.R. Smith and A.H. Peake, « Internal-NodeWaveform Analysis of MMIC Power Amplifier” , IEEE Trans. On MTT, vol.43, n°12,dec 1995, pp. 3037-3042
[3] C.J. Wei, Y.E. Lan, J.C.M. Wang, W-J. Ho, and J.A. Higgins, “Waveform-BasedModeling and Characterization of Microwave Power Heterojonction BipolarTransistors” , IEEE Trans. On MTT, vol.43, n°12, dec 1995.
[4] U. Arz, H.C. Reader, P. Kabos, and D.F. Williams, "Wideband frequency-domaincharacterization of high impedance probes", 58th ARFTG Conference Digest, SanDiego, CA, USA, November 2001
[5] P. Kabos, H.C. Reader, U. Arz, and D.F. Williams, “Calibrated WaveformMeasurement with High Impedance Probes”, Article du NIST, periodique à paraitre,2002 ou 2003.www.boulder.nist.gov/div813/rfelec/micro/dylan/papers/WaveformMeasurementsMTT.pdf
[6] R.F. Bauer and P. Penfield, “De-embedding and Unterminating” , IEEE Trans. On MTT,vol. 22, n°3, pp.282-288, March 1974
[7] R.B. Marks, “A Multiline Method of Network Analyser Calibration” , IEEE Trans. OnMTT, vol.39, no 7, pp.1205-1215, July 1991
[8] D.A. Frickey, “Conversions Between S, Z, Y, h, ABCD, and T Parameters which areValid for Complex Source and Load Impedances”, .IEEE Trans. On MTT, vol.42, no 2,Feb 1994, pp.205-211.
[9] R.B. Marks and D.F. Williams, “Comments on “Conversions Between S,Z,Y,h,ABCD,and T Parameters which are Valid for Complex Source and Load Impedances” ” , IEEETrans. On MTT, vol.43, no 4, April 1995, pp. 914-915.
[10] W. Van Moer, “Development of New Measuring and Modelling Techniques for RFICsand their Nonlinear Behaviour” , PhD Thesis, Vije Universiteit Brussel, Juni 2001
[11] D. Barataud, “Etude et conception de systèmes de caractérisation fonctionnelle dans ledomaine temporel des transistors de puissance radiofréquences et microondes”, Thèsede doctorat, Université de Limoges, n°42-98, Octobre 1998.
44
[12] CASCADE Microtech, “A Guide to Better Vector Network Analyser Calibrations forProbe-Tip Measurement” , Technical Brief, TECHBRIEF4-0694, 1994.
[13] R.B. Marks, D.F. Williams, “Characteristic Impedance Determination UsingPropagation Constant Measurement” , IEEE Microwave and Guided Wave Letters,vol. 1, n°6, June 1991, pp. 141-143.
[14] D.F. Williams, R.B. Marks, “Transmission Line Capacitance Measurement” , IEEEMicrowave and Guided Wave Letters, vol. 1, pp.243-245, September 1991.
[15] K. Kurokawa, “Power Waves and the Scattering Matrix” , IEEE Transactions onMicrowave Theory and Techniques, pp. 194-202, March 1965.
[16] R.B. Marks, D.F. Williams, “A General Waveguide Theory” , Journal of Research of theNational Institute of Standards and Technology, vol. 97, n°5, pp. 533-562, September-October 1992.
[17] D.F. Williams, R.B. Marks, “Accurate Transmission Line Characterization” , IEEEMicrowave and Guided Wave Letters, vol. 3, n° 8, August 1993, pp 247-249.
[18] D.F. Williams, “Multiconductor Transmission Line Characterization” , IEEE Trans.Comp. Pack. and Manuf. Techno. – Part B, vol. 20, n° 2, pp. 129-132, May 1997.
[19] D.F. Williams, L.A. Hayden, R.B. Marks, “A Complete Multimode Equivalent-CircuitTheory for Electrical Design”, Journal of Research of the National Institute of Standardsand Technology, vol. 102, Number 4, July-August 1997.
[20] D.F. Williams, R.B. Marks, “On-Wafer Impedance Measurement on Lossy Substrates” ,IEEE Microwave and Guided Wave Letters, vol. 4, n° 6, June 1994, pp. 175-176.
[21] D.F. Williams, U. Arz, H. Grabinsky, “Accurate Characteristic ImpedanceMeasurement on Silicon”, 1998
[22] D.F. Williams, P.D. Hale, T.S. Clement, J.M. Morgan, “Mismatch corrections forElectro-Optic Sampling Systems”,
[23] M. D. Janezic, J.A. Jargon, “Complex Permittivity Determination from PropagationConstant Measurements” , IEEE Microwave and Guided Wave Letters, vol. 9, n° 2,February 1999, pp. 76-78.
[24] D.C. DeGroot, J.A. Jargon, R.B. Marks, “Multiline Revealed”, à paraitre 2002 ou 2003.
[25] T.M. Winkel, L.S. Dutta, H. Grabinsky, E. Grotelüschen, “Determination of thePropagation Constant of Coupled Lines on Chips Based on High FrequencyMeasurements” , IEEE Multi-Chip Module Conference, pp. 99-104, February 1996.
[26] D.C. DeGroot, D.K. Walker, R.B. Marks, “Impedance Mismatch effects on PropagationConstant Measurements” , 7th IEEE EPEP Conference Digest, pp. 141-143, Napa, CA,October 28-30, 1996.
45
[27] H.F. Eul, B. Schiek, “A Generalized Theory and New Calibration Procedure forNetwork Analyser Self Calibration” , IEEE Transactions on Microwave Theory andTechniques, vol. 39, n°4, April 1991.
[28] T. Reveyrand, “Conception d’un système de mesure d’enveloppes temporelles auxaccès de modules de puissance. Application à la mesure du NPR et à la modélisationcomportementale” , Thèse de doctorat, Université de Limoges, n°15-2002, Avril 2002.
[29] J. Verspecht, K. Rush, “Individual Characterization of Broadband SamplingOscilloscopes with a Nose-to-Nose Calibration Procedure” , IEEE Trans. Instrum.Meas., vol. 43, n° 2, pp.347-354, April 1994.
[30] C.M. Wang, P.D. Hale, K.J. Coakley, “Least-Squares Estimation of Time-BaseDistortion of Sampling Oscilloscopes”, IEEE Trans. Instr. and Meas., vol. 48, 1999,pp. 1324-1332.
[31] Agilent Technologies, “HP 71500A – Microwave Transition Analyser”
[32] J. Verspecht, “Everything you’ve always wanted to know about « Hot-S22 » (but wereafraid to ask)” , Intoducing New Concepts in Nonlinear Network Design, Workshop atthe International Microwave Symposium 2002, Seattle, Washington, June 2002.
[33] A. Geens, “Measurement and Modelling of the Noise Behavior of High-FrequencyNonlinear Active Systems”, PhD Thesis, Vije Universiteit Brussel, Mei 2002
[34] J.P. Teyssier, S. Augaudy, D. Barataud, J.M. Nébus, R. Quéré, “Large-signal timedomain characterization of microwave transistors under RF pulsed conditions” , ARFTGSpring 2001 Digest, 25 may 2001, Phoenix, AZ, pp.45-48
[35] J. Verspecht, P. Debie, A. Barel, L. Martens, “Accurate on wafer measurement of phaseand amplitude of the spectral components of incedents and scattered voltage waves atthe signal ports of a non-linear microwave device” , Conference record of the IEEEMicrowave Theory and Techniques Symptosium 1995, Orlando, Florida, USA, pp.1029-1032, May 1995.
[36] J. Stenarson, K. Yhland, C. Wingqvist, “An In-Circuit Noncontacting MeasurementMethod for S-Parameters and Power in Planar Circuits” , IEEE Trans. On MTT, vol. 49,no. 12, December 2001, pp. 2567-2572.
[37] R.M. Reano, J.F. Whitaker, L.P.B. Katehi, “Field-Tunable Probe for Combined Electricand Magnetic Field Measurements” , IEEE MTT-S Digest, 2002, pp.1513-1516.
























![Alain [Emile Chartier] - Preliminaire a l'Esthetique [1936]](https://img.pdfslide.fr/doc/110x75/577ce1411a28ab9e78b51678/alain-emile-chartier-preliminaire-a-lesthetique-1936.jpg)




