Embed Size (px)
Citation preview

Sciences Industriellesde l’ingénieur
CI 3 – CIN : ÉTUDE DU COMPORTEMENT CINÉMATIQUE DES SYSTÈMES
CHAPITRE 6 – CINÉMATIQUE DU POINT IMMATÉRIEL DANS UN SOLIDE EN MOUVEMENT
TRAVAIL DIRIGÉ : CALCUL DE VITESSE DE GLISSEMENT
Exercice 1 : Capsuleuse de bocauxObjectif :
– Introduire la notion de vitesse de glissement
– Établir la loi Entrée/Sortie lors d’une transmission de mouvement par contact ponctuel
Objectif technologique :
– Diminuer l’usure dans les composants constituants la croix de Malte.
– Valider que la vitesse de rotation du moteur empêche le basculement des bocaux.
– Valider le choix du galet.
Mise en situationLe conditionnement de nombreux produits alimentaires est réalisé
dans des bocaux en verre fermés par des capsules vissées. La société
RAVOUX, spécialisée dans le conditionnement, a créé ce prototype
afin d’optimiser ses machines de production. Elle est donc équipée
de nombreux capteurs permettant, via un ordinateur, d’optimiser
les paramètres de production tels que qualité totale, production
maximale, ...
Le système de laboratoire proposé s’insère dans une chaîne
de conditionnement de produits alimentaires, entre l’unité de
remplissage des bocaux et le poste d’étiquetage. Sa fonction principale
est la «fermeture étanche de bocaux préalablement remplis de
produits alimentaires»
Ce système comprend plusieurs parties :
– un convoyeur linéaire d’alimentation des bocaux ;
– un système électromécanique de transfert et d’indexation des
bocaux (moto-réducteur, mécanisme à Croix de Malte, étoile de
transfert) ;
– un magasin de stockage des capsules ;
– une partie opérative pneumatique de pose et de vissage des capsules
- vérin V1, tête de vissage comprenant les vérins V2 et VR, ventouse
et vacuostat (le vacuostat est une cellule permettant d’assurer la
mise en dépression de la ventouse afin d’effectuer la préhension de
la capsule) ;
– un vérin de serrage des bocaux sous la tête de vissage ;
– un convoyeur linéaire d’évacuation des bocaux ;
– une partie commande par automate programmable Télémécanique
TSX 37-10 64 entrées/sorties et un pupitre de commande.
2013 – 2014Xavier PESSOLES
1 CI 3 : CIN – CoursCh 6 : Cinématique du point – TD Glissement – P

Sciences Industriellesde l’ingénieur
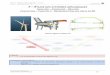
On s’intéresse ici au système de croix de Malte. Il permet d’obtenir une rotation discontinue à partir d’un mouvement de
rotation continue. Ainsi, pendant que la croix de Malte ne tourne pas, le système peut agir sur la matière d’œuvre (flacon).
Lors de la rotation de la croix de Malte, la capsuleuse déplace deux flacons. Afin d’accroître la productivité, il faut diminuer
la durée de cette phase. Cependant, si la croix de Malte tourne trop vite, les flacons basculent ce qui entraîne un mauvais
fonctionnement du système. Ainsi, on désire que la vitesse de la croix soit inférieure à 50 tours/minute.
Modélisation sans galetAfin de modéliser le système à croix de malte, on
propose le schéma cinématique ci-contre.
On note :
– R =
O,−→x0 ,−→y0 ,−→z 0
le repère lié au bâti S0. On
note−→O B =−L−→x0 avec L = 145 m m ;
– R1 =
O,−→x1 ,−→y1 ,−→z 1
le repère lié à l’arbre S1.
On pose−→OA = R−→y1 avec R = 141 m m et α =
−→x0 ,−→x1
. L’arbre S1 est lié au motoréducteur de
la capsuleuse. On a : α= 10 t r /m i n ;
– R2 =
B ,−→x2 ,−→y2 ,−→z 2
le repère lié à l’arbre S2. On
pose−→BA =λ(t )−→x2 ,
−→AI = r−→y2 et β =
−→x0 ,−→x2
;
Question 1
Donner le paramétrage associé au schéma cinématique.
Cor
rect
ion
Question 2
Établir la loi entrée/sortie du système.
Cor
rect
ion
On a :−→OA +
−→A B +
−→BO =
−→0 ⇐⇒R−→y1 −λ(t )−→x2 + L−→x0 =
−→0
En projetant sur −→x0 et −→y0 on a :(
−R sinα(t )−λ(t )cosβ (t )+ L = 0
R cosα(t )−λ(t )sinβ (t ) = 0
Suivant le cas, on peut donc avoir α en fonction de β ou λ en fonction de α ou β :
tanβ =R cosα
L−R sinα
λ(t )2 =R2+ L2−2RL sinα
2013 – 2014Xavier PESSOLES
2 CI 3 : CIN – CoursCh 6 : Cinématique du point – TD Glissement – P

Sciences Industriellesde l’ingénieur
Question 3
Donner une méthode permettant de valider la cahier des charges vis à vis de la vitesse de rotation de la croix de Malte.
Cor
rect
ion On peut calculer :
β =R2α− LRαsinα
L2−2RL sinα+R2
Le tracé Excel permet de valider que la vitesse de rotation de la croix de Malte reste inférieure à 50 tours par minute.
Question 4
Donner l’expression de−−−−−−→V (I ,S1/S0) et
−−−−−→Ω(S1/S0).
Cor
rect
ion
V (S1/S0)=
( −−−−−→Ω(S1/S0) = α
−→z 0−−−−−−−→V (O,S1/S0) =
−→0
)
O
=
( −−−−−→Ω(S1/S0) = α
−→z 0−−−−−−→V (I ,S1/S0) =
−→IO ∧ α−→z 0
)
I
−−−−−−→V (I ,S1/S0) =
−R−→y1 − r−→y2
∧ α−→z 0 =−Rα−→x1 − r α−→x2
V (S1/S0)=
( −−−−−→Ω(S1/S0) = α
−→z 0−−−−−−→V (I ,S1/S0) =−Rα−→x1 − r α−→x2
)
I
Question 5
Donner l’expression de−−−−−−→V (I ,S2/S0) et
−−−−−→Ω(S2/S0).
Cor
rect
ion
V (S2/S0)=
( −−−−−→Ω(S2/S0) = β
−→z 0−−−−−−−→V (B ,S2/S0) =
−→0
)
B
=
( −−−−−→Ω(S2/S0) = β
−→z 0−−−−−−→V (I ,S2/S0) =
−→I B ∧ β−→z 0
)
I
−−−−−−→V (I ,S2/S0) =
−λ(t )−→x2 − r−→y2
∧ β−→z 0 =λ(t )β−→y2 − r β−→x2
V (S2/S0)=
( −−−−−→Ω(S2/S0) = β
−→z 0−−−−−−→V (I ,S2/S0) =λ(t )β
−→y2 − r β−→x2
)
I
Question 6
En déduire l’expression de−−−−−−→V (I ,S2/S1) dans la baseR2. On donne −→x1 = cos(α−β )−→x2 + sin(α−β )−→y2 .
Cor
rect
ion
D’après la composition du torseur cinématique on a :
V (S2/S1)= V (S2/S0)+ V (S0/S1)⇐⇒ V (S2/S1)= V (S2/S0)− V (S1/S0)
On a donc :
V (S2/S1)=
( −−−−−→Ω(S2/S1) =
−−−−−→Ω(S2/S0)−
−−−−−→Ω(S1/S0) =
β − α−→z 0
−−−−−−→V (I ,S2/S1) =
−−−−−−→V (I ,S2/S0)−
−−−−−−→V (I ,S1/S0) =λ(t )β
−→y2 − r β−→x2 +Rα−→x1 + r α−→x2
)
I
−→x1 = cos(α−β )−→x2 + sin(α−β )−→y2
2013 – 2014Xavier PESSOLES
3 CI 3 : CIN – CoursCh 6 : Cinématique du point – TD Glissement – P

Sciences Industriellesde l’ingénieur
Cor
rect
ion
D’où :
−−−−−−→V (I ,S2/S1) =λ(t )β
−→y2 − r β−→x2 +Rαcos(α−β )−→x2 +Rαsin(α−β )−→y2 + r α−→x2 =
−r β +Rαcos(α−β )+ r α
λ(t )β +Rαsin(α−β )0
R2
Question 7
D’après le paramétrage adopté, quelle est la direction du vecteur vitesse du solide S1 par rapport à S2 ? En utilisant les résultats
de la question précédente, déduire une condition de fonctionnement du mécanisme.
Cor
rect
ion
Nécessairement, la vitesse de glissement appartient au plan tangent au contact. On a donc :
(
−r β +Rαcos(α−β )+ r α= λ
λ(t )β +Rαsin(α−β ) = 0
Question 8−−−−−−→V (I ,S2/S1) · −→x2 est appelée vitesse de glissement. Quel problème technologique pose l’existence de cette vitesse ? Ce problème
est-il pris en compte sur la capsuleuse ? Si oui, comment ? Si non, proposez une modification du système permettant la prise en
compte de ce problème.
Cor
rect
ion
Cette vitesse de glissement provoque le frottement du doigt sur la croix de Malte. Ce frottement entraînant de l’usure,
la capsuleuse de bocaux est équipée d’un galet.
Modélisation avec galet
On considère maintenant l’existence d’un galet S3
en bout de de l’arbre S1. On fait l’hypothèse que le
galet roule sans glisser dans le S2. S3 et S1 sont en
liaison pivot d’axe −→z 0 et de centre A.
Le galet a un diamètre extérieur de 16 m m .
D’après la documentation constructeur, la vitesse
de rotation du galet ne doit pas dépasser les
5000 t r /m i n .
2013 – 2014Xavier PESSOLES
4 CI 3 : CIN – CoursCh 6 : Cinématique du point – TD Glissement – P

Sciences Industriellesde l’ingénieur
Question 9
Quelle est la modification sur le paramétrage du système ?
Cor
rect
ion
Un angle γ correspondant à la rotation du galet sur lui même apparaît.
Question 10
Comment est-il possible de traduire l’hypothèse de roulement sans glissement ?
Cor
rect
ion La vitesse est nulle entre le galet et la croix de Malte est nulle au point I :
−−−−−−→V (I ,S3/S2) =
−→0
Question 11
Calculer la vitesse de rotation du galet γ en commençant par exprimer−−−−−−→V (I ,S3/S2) ? Indice : décomposer
−−−−−−→V (I ,S3/S2) en fonction
des mouvements connus.
Cor
rect
ion
Malgré l’introduction d’un nouveau composant, la position du point I reste inchangée.
Il faut identifier le torseur V (S3/S2). Pour cela, la composition des vitesses donne :
V (S3/S2)= V (S3/S1)+ V (S1/S2)
Au point I on connaît déjà V (S1/S2).Calculons V (S3/S1) :
V (S3/S1)=
( −−−−−→Ω(S3/S1) = γ
−→z 0−−−−−−−→V (A,S3/S1) =
−→0
)
A
=
( −−−−−→Ω(S3/S1) = γ
−→z 0−−−−−−→V (I ,S3/S1) =
−→I A ∧ γ−→z 0 =−r−→y2 ∧ γ−→z 0 =−r γ−→x2
)
I
On a donc :−−−−−−→V (I ,S3/S2) =
−−−−−−→V (I ,S3/S1)+
−−−−−−→V (I ,S1/S2)
2013 – 2014Xavier PESSOLES
5 CI 3 : CIN – CoursCh 6 : Cinématique du point – TD Glissement – P

Sciences Industriellesde l’ingénieur
Cor
rect
ion
−−−−−−→V (I ,S3/S2) =−r γ−→x2 +
−r β +Rαcos(α−β )+ r α−→x2 −
λ(t )β +Rαsin(α−β )−→y2
−−−−−−→V (I ,S3/S2) =
−r γ+
−r β +Rαcos(α−β )+ r α
−
λ(t )β +Rαsin(α−β )
0
R2
D’après l’hypothèse de roulement sans glissement, on a :
−−−−−−→V (I ,S3/S2) =
−→0 =⇒ γ=−
−r β +Rαcos(α−β )+ r α
r
Question 12
Valider le choix du galet.
Cor
rect
ion
γ=−−r β +Rαcos(α−β )+ r α
r
Exercice 2 : Roulement à billesD’après ressources de Renan Bonnard.
Un roulement mécanique est un élément technologique permettant le positionnement, la transmission des efforts et la
rotation entre deux pièces par roulement. Ce composant mécanique interposé entre les deux pièces optimise le frottement et la
précision de la liaison. Un roulement à billes se présente sous la forme de deux bagues coaxiales entre lesquelles sont placées des
billes maintenues espacées par une cage. La fonction de la cage est donc de maintenir deux billes consécutives à distance égale
l’une de l’autre lors du fonctionnement du roulement mais elle entraîne aussi des effets nuisibles car il existe un phénomène de
glissement entre la cage et les billes. L’objectif est d’étudier ce phénomène de glissement.
On désigne par :
– R0 =
O,−→x0 ,−→y0 ,−→z 0
le repère associé au bâti 0 ;
– R1 =
O,−→x1 ,−→y1 ,−→z 0
le repère associé à la bague intérieure 1 en liaison pivot d’axe (O,−→z 0 ) avec le bâti 0 tel que θ1 =−→x0 ,−→x1
=−→y0 ,−→y1
;
– R2 =
O,−→x2 ,−→y2 ,−→z 0
le repère associé à la bague extérieure 2 en liaison pivot d’axe (O,−→z 0 ) avec le bâti 0 tel que θ2 =−→x0 ,−→x2
=−→y0 ,−→y2
;
– R3 =
G ,−→x3 ,−→y3 ,−→z 0
le repère associé à la bille 3 qui roule sans glisser sur 1 en I et sur 2 en J et dont on peut considérer
qu’elle est en liaison pivot d’axe (G ,−→z 0 ) avec la cage 4 tel que θ3 =−→x0 ,−→x3
=−→y0 ,−→y3
;
2013 – 2014Xavier PESSOLES
6 CI 3 : CIN – CoursCh 6 : Cinématique du point – TD Glissement – P

Sciences Industriellesde l’ingénieur
– R4 =
O,−→x4 ,−→y4 ,−→z 0
le repère associé à la cage 4 en mouvement de rotation autour de (O,−→z 0 ) tel que θ4 =−→x0 ,−→x4
=−→y0 ,−→y4
.
Pour faciliter les calculs on définit le repère R =
O,−→i ,−→j ,−→z 0
tel que, à tout instant, le vecteur−→i possède la même
direction et le même sens que le vecteur−→OG . Ce repère n’est lié à aucun solide en particulier et ne sert qu’à exprimer simplement
les différents termes cinématiques évoqué dans l’énoncé. On pose :
ωk = θk (k = 1, 2, 3, 4)−→OI = r1
−→i−→O J = r2
−→i−→G C =
1
2(r2− r1)
−→j
Question 1
Réaliser les figures planes correspondant au paramétrage du système.
Question 2
Déterminer−−−→Ω(1/0),
−−−−−−−→V (O ∈ 1/0) et
−−−−−−→V (I ∈ 1/0).
Cor
rect
ion
V (1/0)=
( −−−→Ω(1/0) = θ1
−→z 0−−−−−→V (O, 1/0) =
−→0
)
O
=
( −−−→Ω(1/0) = θ1
−→z 0−−−−−→V (I , 1/0) = r1ω1
−→j
)
I
Question 3
Déterminer−−−→Ω(2/0),
−−−−−−−→V (O ∈ 2/0) et
−−−−−−→V (J ∈ 2/0).
Cor
rect
ion
V (1/0)=
( −−−→Ω(2/0) = θ2
−→z 0−−−−−→V (O, 2/0) =
−→0
)
O
=
( −−−→Ω(2/0) = θ2
−→z 0−−−−−→V (J , 2/0) = r1ω2
−→j
)
J
Question 4
Exprimer les conditions de roulement sans glissement en I et J . Établir les expression des vecteurs−−−−−→V (I , 3/0) et
−−−−−→V (J , 3/0).
Cor
rect
ion
−−−−−→V (I , 3/1) =
−→0
−−−−−→V (I , 3/0) =
−−−−−→V (I , 3/1)+
−−−−−→V (I , 1/0) =⇒
−−−−−→V (I , 3/0) =
−−−−−→V (I , 1/0) = r1ω1
−→j
−−−−−→V (J , 3/2) =
−→0
−−−−−→V (J , 3/0) =
−−−−−→V (J , 3/2)+
−−−−−→V (J , 2/0) =⇒
−−−−−→V (J , 3/0) =
−−−−−→V (J , 2/0) = r2ω2
−→j
Question 5
En déduire l’expression deω3 en fonction de r1, r2,ω1,ω2.
Cor
rect
ion −−−−−→
V (I , 3/0) =−−−−−→V (J , 3/0)+
−→I J ∧
−−−→Ω(3/0)
ω3 =r2ω2− r1ω1
r2− r1
2013 – 2014Xavier PESSOLES
7 CI 3 : CIN – CoursCh 6 : Cinématique du point – TD Glissement – P

Sciences Industriellesde l’ingénieur
Question 6
Déterminer−−−−−→V (G , 3/0) en fonction de r1, r2,ω1,ω2.
Cor
rect
ion
−−−−−→V (G , 3/0) =
−−−−−→V (I , 3/0)+
−→G I ∧
−−−→Ω(3/0) =
r2ω2+ r1ω1
2
−→j
Question 7
Déterminer l’expression de la vitesse de glissement de la bille 3 par rapport à la cage 4 au point C en fonction de r1, r2,ω1,ω2.
Cor
rect
ion
On cherche à calculer−−−−−→V (C , 3/4) :
−−−−−→V (C , 3/4) =
−−−−−→V (G , 3/4)+
−→CG ∧
−−−→Ω(3/4)
Calcul de−→CG :
−→CG =−
1
2(r2− r1)
−→j
Calcul de−−−→Ω(3/4) :
−−−→Ω(3/4) =
−−−→Ω(3/0)−
−−−→Ω(4/0)
Calcul deω4 :−−−−−→V (G , 3/4) =
−−−−−→V (G , 3/0)−
−−−−−→V (G , 4/0) =
−→0
Calcul de−−−−−→V (G , 4/0) :
−−−−−→V (G , 4/0) =
−−−−−→V (O, 4/0)+
−→GO ∧
−−−→Ω(4/0) =
r2+ r1
2ω4−→j
Au final calcul deω4 :
ω4 =r2ω2+ r1ω1
r1+ r2
Calcul de−−−→Ω(3/4) :
−−−→Ω(3/4) =
−−−→Ω(3/0)−
−−−→Ω(4/0) =
r2ω2− r1ω1
r2− r1−
r2ω2+ r1ω1
r2+ r1
−→z 0
Au final en faisant le calcul on obtient :
−−−−−→V (C , 3/4) =
r2r1(ω1−ω2)r1+ r2
−→i
2013 – 2014Xavier PESSOLES
8 CI 3 : CIN – CoursCh 6 : Cinématique du point – TD Glissement – P