-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 1 de 18
EExxeerrcciiccee 00 :: BBaanncc ddeessssaaii ppoouurr
ttrraannssmmiissssiioonnss ccaarrddaann
Entirement automatique, ce banc d'essai est conu pour simuler le
travail de transmissions cardan pour vhicules.
La transmission cardan est monte sur une armature articule
permettant de lui donner l'an-gle souhait grce l'action d'un vrin
hydraulique. Un moteur fait tourner la transmission la vitesse V
souhaite, et un frein permet de la solli-citer avec le couple C
voulu.
Les trois facteurs ainsi matriss pour tester la transmission
cardan sont donc :
l'angle ; la vitesse V ; le couple C.
Dune trs longue dure, les essais tournent 24 h sur 24, selon un
programme prenregistr, donnant tous moments les valeurs de la
vitesse V, du couple C, et de l'angle pris par la transmission au
long d'un parcours type : dmarrages, virages, arrts, etc.
Priodiquement, le programme demande une dpose et un contrle de la
transmission avant d'autoriser la pour-suite des essais.
Figure 1 : Machine dencaissage semi-automatique
Utilisation du GRAFCET
Dans cet exemple particulier, la production tant assure
uniquement par la lecture d'un pro-gramme, le GRAFCET n'a pas t
utilis. Cette application a t choisie comme premier exemple
introductif pour faire comprendre plus rapidement l'intrt du GEMMA
dans une pre-mire approche.
Modes de marches et darrts
Afin de faire tout de suite dcouvrir l'objectif poursuivi, nous
prsentons ici directement le GEMMA final (figure 2).
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 2 de 18
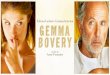
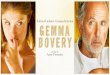
Figure 2 : GEMMA pour le banc dessai pour transmissions
cardan
Ce GEMMA a t en fait obtenu en deux temps : 1. Slection des
modes de marches et d'arrts, en utilisant les rectangles tats et en
dfi-
nissant les liaisons. 2. Recherche des conditions d'volution
entre tats, en parallle avec la dfinition du pupi-
tre de commande.
Pour ce premier exemple, contentons-nous d'expliquer les choix
effectus, sans suivre dans le dtail la mthode d'obtention.
L'tat F1, Production normale , est la mise en oeuvre du
programme, pour droulement de l'essai. Cet tat F1 est atteint
depuis l'tat initial A1, par la frappe du mot excution sur le
clavier du pupitre (figure 3), la traverse de l'tat F2 qui permet
une mise l'heure, puis la mise sur auto du slecteur de marche et
l'action sur le bouton marche .
tout moment, l'arrt de la machine peut tre provoqu manuellement
par passage dans les tats A3 et A4, en agissant sur le bouton arrt
du pupitre.
Lorsque le programme demande l'opration de dpose et de contrle
de la transmission, un signal fin de srie essais nous conduit en
A2, puis en A4 lorsque l'arrt est obtenu. Aprs contrle et
remontage, il suffit d'agir sur le bouton marche , le slecteur de
marche tant en auto pour repartir en F1 avec la srie suivante
dessais dans le programme.
Lorsque les essais sont termins, un signal Fin essais nous
conduit en A2, puis en A1.
Lorsque la machine s'carte de plus de 10 % des valeurs demandes
par le programme pour V, C ou , nous passons en D3, Production tout
de mme . Les essais continuent, mais dfaut
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 3 de 18
et heure sont affichs sur l'cran. Lorsqu'un oprateur survient,
il peut alors arrter la ma-chine vers A3 ou acquitter et revenir en
F1.
Atteinte par la slection manuel , la Marche de vrification F4
permet au choix :
de vrifier le fonctionnement des asservissements de V, C et ,
par affichage des perfor-mances mini et maxi, l'aide des
potentiomtres prvus au pupitre ;
de procder des vrifications de comportement par des essais
prolongs avec consignes fixes V, C et ; dans ce cas, la marche de
vrification est productive puisqu'elle essaie la transmission :
elle est donc situe dans le rectangle en production .
On remarquera que, partir du guide graphique, le rectangle tat
F4 a t obtenu par le re-groupement des rectangles tats F4 et F5
dorigine. De telles adaptations du guide graphique donnent souvent
la souplesse ncessaire pour lappliquer des exemples trs
diffrents.
S'il y a action sur le bouton d'arrt d'urgence (AU) ou s'il y a
dpassement de V ou C maximum autoriss pour la transmission essaye,
nous passons en D1 Arrt d'Urgence ce qui provo-que la coupure
dnergie de la PO et le freinage. En D2, l'heure et la raison de
l'arrt sont af-fiches. Lorsqu'un oprateur survient, il peut alors
agir sur le bouton arrt pour passer on A5, remettre les consignes
zro et, par action sur le bouton acquittement, passer en A7 pour
redmarrer depuis A4.
Au travers de cet exemple, ltudiant peut commencer percevoir les
objectifs et rsultats du GEMMA.
Figure 3 : Pupitre de commande comportant un clavier et un
cran
Source : ADEPA, le GEMMA, Guide d'tude des Modes de Marches et
dArrts , Montrouge, France, 1981.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 4 de 18
EExxeerrcciiccee 11 :: MMaacchhiinnee rreemmpplliirr eett
bboouucchheerr
La machine remplir et boucher a t dj tudie titre dexemple
dapplication de GRAFCET. La machine montre la figure 4 est compose
de trois postes. Le poste 1 sert au transfert et au chargement. Le
poste 2 sert au remplissage des bouteilles. Enfin, le poste 3 est
le poste de bouchage.
Figure 4 : Machine remplir et boucher
Fonctionnement normal
Le GRAFCET du fonctionnement normal de la machine dencaissage
est prsent la figure 5. Pour optimiser la cadence de production,
les trois postes travaillent en parallle.
Depuis l'tape initiale 1, un signal dcy (bouton marche )
autorise le fonctionnement. Dans un premier temps, on sort le vrin
de transfert B pour dcaler le convoyeur dune position vers la
droite.
Ensuite, dans la branche correspondante au poste 1, le vrin A
charge une nouvelle bouteille vide et le vrin B se retire. Ensuite,
le vrin A se retire.
Dans la branche correspondante au poste 2, le vrin C sort, tout
en ouvrant la vanne D, pour vider le contenu du cylindre doseur
dans la bouteille. Ensuite, on ferme la vanne D et on r-tracte le
vrin C pour remplir nouveau le cylindre doseur.
Dans la branche correspondant au poste 3, lextension du vrin G
prsente un nouveau bou-chon sous le dispositif de vissage compos du
vrin E et du moteur F. Le vrin E est alors sorti pour saisir le
bouchon. Ensuite, le vrin E doit tre rentr de mme que le vrin G
pour retirer le dispositif prsentant le bouchon. Enfin, le vrin E
est mis en extension en mme temps que le moteur pneumatique F
tourne, pour permettre le vissage du bouchon sur la bouteille.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 5 de 18
11
2
dcy.a0.c0.e0
b+
b1
3 a+
a1.b0
5 c+
c1
4 a-
a0.c0.e0
b- d
6 c-
7 g+
g1
8 e+
e1
9 e-
e0
g-10
g0
11 e+
e1
f
12 e-
Figure 5 : GRAFCET du fonctionnement normal de la machine
remplir et boucher
Modes de marches et darrts
Le fonctionnement normal ayant t analys, passons maintenant aux
divers modes de mar-ches et darrts. En fonctionnement normal, il
tait assum quil ne manquait aucune bou-teille et que les trois
postes fonctionnaient ensemble.
Comme le produit mis dans les bouteilles se dgrade avec le temps
lorsque expos lair am-biant, il est donc ncessaire de procder en
fin de journe la vidange complte du convoyeur en interdisant le
chargement de nouvelles bouteilles. Larrt de la production sera
progressif, chaque poste sarrtant aprs avoir trait la dernire
bouteille.
Le matin, la mise en route du procd sera, elle aussi
progressive, chaque poste se mettant en route lorsque la premire
bouteille sy prsente. La production devient donc normale lors-que
la bouteille atteint le poste 3.
tant donn les temps requis pour vider puis charger le convoyeur,
si loprateur dsire faire un arrt de courte dure (par exemple une
pause caf) en appuyant sur le bouton arrt , le systme sarrte en fin
de cycle et redmarre lors de lappuis sur le bouton marche . Cest ce
mme bouton que lon utilise pour lancer le procd le matin.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 6 de 18
En cas de dfaillance du poste de bouchage, il est prvu de
continuer de produire. Il faut alors que loprateur actionne le
slecteur poste 3 hors service (HS3) pour bloquer le fonction-nement
du poste 3, ce qui vite dendommager la machine ou les bouteilles.
Le bouchage sera assur par des ouvriers tant que cette situation
dure.
En cas de problmes majeurs, loprateur pourra stopper la machine
instantanment par ap-puis sur le bouton arrt durgence (AU). Larrt
durgence est de type figeage. Lors de larrt durgence, il faut
fermer la vanne D de remplissage pour viter que le rservoir se vide
par gravit. Suite larrt durgence, loprateur doit nettoyer les dgts
et vrifier la source du bris. Ensuite, il doit mettre la machine en
position initiale de faon manuelle.
Enfin, un mode de marche semi-automatique est prvu pour tester
sparment les squences des trois postes. Du mode semi-automatique,
loprateur peut retourner en production nor-male ou aller en mode
manuel. Justement, le mode de marche manuelle est disponible pour
tester chacun des actionneurs de faon indpendante. Le mode manuel
se fait par lintermdiaire dun panneau de commande extrieur qui nest
pas branch lautomate. Suite au mode manuel, loprateur doit remettre
la machine en position initiale.
laide du GRAFCET dj tabli (figure 5), construire le GEMMA de cet
automatisme et enri-chir le GRAFCET.
Source : ADEPA, le GEMMA, Guide d'tude des Modes de Marches et
dArrts , Montrouge, France, 1981.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 7 de 18
EExxeerrcciiccee 22 :: MMaacchhiinnee ddeennccaaiissssaaggee
sseemmii--aauuttoommaattiiqquuee
La machine dencaissage semi-automatique montre la figure 6
assure le groupage de pro-duits et leur introduction dans une boite
en carton. Les produits se prsentent sous forme de paquets, de
barquettes, de boites, de sachets ou de fardeaux. Ils peuvent tre
groups de fa-on trs variable, chaque carton comportant l fardes
constitues chacune de m ranges de n produits. L'oprateur prpare le
carton et le place sur la machine. Toutes les autres fonctions sont
assures par les trois vrins A, B, et D (figure 7).
Figure 6 : Machine dencaissage semi-automatique
Rle des vrins
Les produits arrivant constituent une range (ici trois produits)
sur le plateau du vrin B. Cha-que range est souleve par le vrin B
et empile devant le vrin A, sur le support lastique. Lorsque la
farde est complte (ici trois ranges), le vrin A la transfre dans le
carton, le pla-teau du vrin B servant alors de guide. En parallle,
le vrin D maintient le carton en position. Lorsque le carton est
plein (ici deux fardes), le vrin D le descend en le faisant pivoter
jus-qu'au chemin des rouleaux transporteurs par lesquels il est
vacu.
Disposition des capteurs
Les capteurs t1 et t2 sont des dtecteurs de produits : t1
constate la formation de la range alors que t2 constante la
formation de la farde.
Le capteur effet de pression t3, qui quipe le vrin A, dclenche
ds que la contre-pression d'chappement chute compltement ; ceci
signifie que la farde est en bute dans le carton, quelle que soit
alors la position de A au long de sa course. La combinaison des
capteurs t3 et a2 permet de dtecter si le carton est plein.
Enfin, les capteurs de fin de course suivants sont utiliss : a0
et d1, capteurs de fin de course mcaniques ; b0 et b1, capteurs de
fin de course monts sur vrin.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 8 de 18
Figure 7 : Machine dencaissage semi-automatique (vrins et
capteurs montrs)
Fonctionnement normal
Le GRAFCET du fonctionnement normal de la machine dencaissage
est prsent la figure 8.
Depuis l'tape initiale 1, un signal m (marche) autorise le
fonctionnement : tape 2, descente de B, suivie du transfert des
produits jusqu'au capteur t1, et tape 3,
remonte de B pour mise en position de la range de produits ;
l'une des tapes 2 ou 3, l'oprateur provoque le mouvement D pour
introduction du
carton demballage.
Tant que la farde n'est pas complte (/t2), les tapes 2 et 3 sont
reprises pour une nouvelle range.
Lorsque la farde est complte (t2) et condition que le carton
soit en place (d1), on passe l'tape 4.
La farde est pousse (A+) dans le carton jusqu' ce qu'elle arrive
en bute, ce qui dclenche le capteur t3 :
si le capteur a2 n'est pas actionn (t3./a2), l'tape 5 provoque
le retour de A et la reprise de la squence 2-3 puis 2-3 et 4 pour
constituer et introduire la farde suivante ;
si, au contraire, le capteur a2 est actionn (t3.a2), l'tape 6
provoque le retour de la ma-chine en tat initiale (le carton plein
descend sur les rouleaux et le cycle reprend).
En bref, le fonctionnement normal de la machine dencaissage est
: Des ranges de trois pices sont crs (dtection par t1) ; Des fardes
de trois ranges sont formes (dtection par t2) ; Deux fardes sont
pousses dans la boite (dtection par t3 et a2) ; Mise en place de la
boite par pdale q ; Dpart de cycle par m.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 9 de 18
1
2 B-
m
3 B+
b1.t1
b0./t2
D-
q
D-
q
4 A+
b0.t2.d1
t3./a2
6 A-
t3.a2
5 A- D+
a0./d1a0
Figure 8 : GRAFCET du fonctionnement normal de la machine
dencaissage semi-automatique
Modes de marches et darrts
Le fonctionnement normal ayant t analys, passons maintenant aux
divers modes de mar-ches et darrts. Les nouvelles exigences du
cahier de charges sont prsentes ici-bas.
o Au repos, la machine a ses vrins B et D en extension et le
vrin A en rtraction. o La machine encaisse des pices selon le
GRAFCET de la figure 8. o La machine peut aussi tre mise en mode de
rglage pour tester chaque vrin indpen-
damment. La fin de ce mode entrane une remise en tat initial de
la machine. o La condition de fin de mode de rglage est la dtection
du retour en mode automatique,
le signal de rarmement et la vrification de la fermeture du
capot de protection (fc). o Larrt normal de la machine en fin de
cycle se fait par appui sur le bouton arrt . o Lorsque que larrt
durgence (AU) survient, lalimentation des vrins A, B et D doit
tre
sectionne. Par la suite, loprateur doit procder au dgagement
manuel des produits, si ncessaire. La remise en condition initiale
est ncessaire avant de lancer le procd (conditions identiques
celles de la fin du mode de rglage).
o Lorsque la machine est hors tension, les vrins A et B ont leur
alimentation sectionne. Lors de la mise sous tension, loprateur
doit vrifier ltat de la machine avant de re-mettre en condition
initiale et repartir.
o Si quelquun ouvre le capot de scurit, il faut dclencher un
arrt durgence.
laide du GRAFCET dj tabli (figure 8), construire le GEMMA de cet
automatisme et enri-chir le GRAFCET.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 10 de 18
EExxeerrcciiccee 33 :: SSyyssttmmee ddee ttrrii
aauuttoommaattiiqquuee
Le systme de tri automatique montr la figure 9 assure le tri des
pices arrivant sur un convoyeur en ordre mixte. Des pices guides et
orientes, repres A et B, sacheminent sur la voie centrale 0 par un
convoyeur double bande actionn par le moteur M1. Une tte de
lecture, comprenant deux cellules, identifie le type de pices
(cellules A et B).
Aprs identification, les pices A et B sont pousses vers la voie
A ou B par les vrins VA ou VB, condition que ces voies ne soient
pas satures, cette saturation tant capte par MA ou MB = 1. Dans le
cas o une pice A est identifie et que MA = 1, le convoyeur simple
bande, actionn par le moteur M2, vacue la pice et celle-ci sera
recycle en tte de la voie 0.
Un capteur R dtecte le passage de la pice lors de lvacuation. Le
systme de tri peut fonc-tionner en cycle unique (CU) ou en cycle
continu (CC). Le cycle dmarre ds lappui du bouton de dpart de cycle
(M) et du bouton de marche (Marche), et arrte la fin du cycle en
cours si le bouton de marche est dsactiv.
Figure 9 : Systme de tri automatique
Fonctionnement normal
Le GRAFCET du fonctionnement normal du systme de tri est prsent
la figure 10. Ce GRAFCET ne sera pas dcrit ici ; contentons nous
noter lexclusivit des conditions dans les trois branches. Une
erreur commune est davoir des transitions qui ne sont pas toujours
exclu-sives, ce qui peut entraner de graves problmes.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 11 de 18
Marche.M.VA0.VB0
M2
/A + /B
A./B./MA /A.B./MB A./B.MA + /A.B.MB
VA1 VB1 R
(/Marche + CU).VA0.VB0 Marche.CC.VA0.VB0
7
2
1
3
4 6
M1
5 VB M2VA
Figure 10 : GRAFCET du fonctionnement normal du systme de tri
automatique
Modes de marches et darrts
Le fonctionnement normal ayant t analys, passons maintenant aux
divers modes de mar-ches et darrts. On a remarqu que dans certains
cas, des pices nayant aucun trou peuvent se prsenter au dessus des
capteurs (/A./B = 1). Dans ce cas ou si le bouton durgence (AU) est
appuy nimporte quand, toutes les actions doivent tre bloques et un
signal dalarme (AL) doit tre activ. Par la suite, loprateur devra
manuellement retirer la pice dfec-tueuse (si cest le cas) ou rgler
tout autre problme. Un fois fait, pour rendre lautomatisme en
conditions initiales, il devra appuyer le bouton de remise zro
(S).
Lingnieur industriel fait remarquer que le vrin VB est souvent
dfectueux. Lorsquun bris arrive, tout lautomatisme sarrte.
Lingnieur vous demande, dans ce contexte, dajouter un module de
production tout de mme qui fonctionne comme suit : Si le vrin VB
est dfectueux, loprateur enclenche le slecteur de vrin loption
V-
rin A (PTVA) et appuis sur le bouton de production tout de mme
(PT). Ds que ces deux conditions sont remplies, lautomatisme ne
traitera que les pices A. Les pices B seront envoyes au
recyclage.
Le mme mcanisme doit tre implant pour le vrin A. Il faut noter
que le slecteur de vrin ne peut tre qu PTVA ou PTVB et que seul
lappui du bouton PT engendre le mode de production tout de mme.
laide du GRAFCET dj tabli (figure 10), construire le GEMMA de
cet automatisme et enri-chir le GRAFCET.
Source : J. C. Bossy, P. Brand, P. Faugre, et C. Merland, Le
GRAFCET : sa pratique et ses applica-tions , Educalivre, Paris,
France, 1979.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 12 de 18
EExxeerrcciiccee 44 :: MMaacchhiinnee sseerrttiirr
Il faut raliser une machine fabricant une pice constitue dune
contreplaque et dune vis. Cette pice est utilise dans les
dispositifs de fermeture magntique des armoires (figure 11).
Figure 11 : Fermeture magntique
La contreplaque est une pice trs simple (figure 12) fabrique en
deux tailles. La vis sera sertie (figure 13) avec la contreplaque
grce notre automatisme.
Figure 12 : Dtail de la contreplaque
Figure 13 : Principe du sertissage
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 13 de 18
Les contreplaques sont achemines vers lautomatisme depuis un bol
vibrant (pouvant en contenir 1000) quip dune buse dair qui jectera
les pices ayant le trou orient vers le bas. En sortie du bol
vibrant, les contreplaques sont achemines par une glissire incline
de 45 (appel tampon) vers un vrin quip dun poussoir mcanique en v
pour assurer le ser-rage de la contreplaque pendant le sertissage
(figure 14).
Figure 14 : Glissire et poussoir mcanique
La contreplaque tant bloque, le sertissage a lieu et la pice
finale est vacue en la dser-tant et en positionnant correctement le
tiroir dvacuation pour aligner le trou dvacuation sous la pice
(figure 15).
Figure 15 : Systme de serrage et dvacuation
Les vis sont achemines depuis un second bol vibrant pouvant en
contenir 1500. Les vis sont alors descendues par une glissire qui
les oriente et qui les prsente dans un tube tenant le poinon de
sertissage (figures 16 et 17). Un systme de sas sassure quune seule
vis la fois est achemine vers la contreplaque. La machine complte
est montre en figure 18.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 14 de 18
Figure 16 : Systme dacheminement de vis
Figure 17 : Dtail de lacheminement des vis
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 15 de 18
Figure 18 : Machine de sertissage
Fonctionnement normal
Les GRAFCET des niveaux 1 et 2 du fonctionnement normal de la
machine de sertissage sont prsents aux figures 19 et 20. Pour
sertir une pice, il faut que les glissires (appeles aussi tampons)
soient pleines (capteurs tpB1 et tpB2) et que loprateur appui sur
le bouton pous-soir DCY (dpart de cycle).
La premire opration est de transfrer et serrer une contreplaque
sous le poinon de sertis-sage avec le vrin de transfert et de
serrage (action T+). Lorsque ce vrin est sorti (capteur t1), une
vis est achemine en actionnant le sas (action S+), puis en
attendant que la vis sorte du sas (dlai de 0.2 seconde) et en
rechargeant le sas (action S).
Simultanment avec lopration du sas, le poinon est actionn
(action I+). Comme la mise en pression du vrin de sertissage exige
au moins 0.5 seconde avant quil descende et percute la
contreplaque, cette opration est faite en mme temps que ladmission
de la vis qui a donc largement le temps de se mettre en
position.
Une fois que le sertissage est complt (capteur i1), le poinon
remonte (action I) en mme temps que le vrin dvacuation est actionn
(action E) pour mettre le trou dvacuation sous la contreplaque
sertie. Une fois le trou sous la contreplaque (capteur e1) un dlai
de 0.2 seconde est lanc puis le vrin dvacuation retourne sa
position de repos (action E+). Si-multanment, aprs un dlai de 0.3
seconde pour permettre au vrin dvacuation de bien se positionner,
la pice est desserre et le vrin de transfert retourne au repos
(action T).
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 16 de 18
Une fois les vrins retourns leur position de repos (capteurs s0,
i0, e0 et t0), la machine est de nouveau en condition initiale.
Figure 19 : GRAFCET de niveau 1 du fonctionnement normal du
systme de sertissage
1
2 T+
DCY.tpB1.tpB2
t1
3 S+
s1
4 T2 = 0.2s
T2/4/0.2s
5 S-
s0
6
7 I+
i1
8 I-
i0
9
10 E-
e1
11 T3 = 0.2s
T3/11/0.2s
12 E+
e0
13
14
T4/14/0.3s
15
T4 = 0.3s
t0
T-
16
=1
Figure 20 : GRAFCET de niveau 2 du fonctionnement normal du
systme de sertissage
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 17 de 18
Modes de marches et darrts
La machine en condition initiale doit avoir tous les vrins dans
leur position initiale. Les glis-sires peuvent tre vides et les
bols vibrants sont arrts.
Mode Automatique Lorsque la machine est arrte en condition
initiale et que le slecteur de mode est sur auto-matique (AUTO), un
appui sur le bouton poussoir de dpart de cycle (DCY) lance la
produc-tion. La machine doit alors tre prpare par loprateur qui
rempli et dmarre les bols vi-brants. Une fois que les glissires
sont pleines (capteurs tpB1 et tpB2) et que les deux bols vi-brants
en marche (capteurs B1m et B2m), la machine passe en production
normale.
La machine produit en continu cadence maximale jusqu ce que
loprateur demande un arrt en fin de cycle en appuyant sur le bouton
poussoir ACY. Le cycle en cours se termine, la machine attend
ensuite larrt des bols vibrants (/B1m et /B2m) par loprateur, puis
la ma-chine sarrte en condition initiale. Une autre condition de
fin de cycle, cest la dtection dun des tampons vide (glissire vide)
ce qui est caus par un manque de pice (capteurs tvB1 ou tvB2). Le
cycle se termine de la mme faon que prcdemment.
La machine peut tre mise en figeage par appui sur le bouton
poussoir pause, les mouvements en cours se terminant. Cet arrt
permet une pause de courte dure. Pour reprendre la pro-duction
normale, il faut que le slecteur de mode soit sur automatique et
appuyer sur le bou-ton de dpart de cycle.
Mode Manuel Une mode manuel est disponible sur cette machine. Il
suffit de mettre le slecteur de mode sur manuel (MANU). Les
actionneurs peuvent tre actionns par appui sur des boutons poussoir
installs sur le panneau oprateur. On peut accder ce mode de tous
les modes sauf ceux ayant rapport une dfaillance.
Pour quitter ce mode, il faut passer par la mise en condition
initiale en mettant le slecteur de mode la position initialisation
(INIT). Loprateur accs un bouton poussoir BPrf qui doit tre appuy
pour remettre la machine en condition initiale de faon automatique,
ce qui se fait en remettant tous les vrins en position initiale en
mme temps. Une fois cette initiali-sation faite, la machine est
alors arrte en condition initiale.
Dfaillances La machine est quipe de capteurs pour dtecter
certains types de dfaillances. Ainsi, un capteur de pression (p5)
vrifie que la pression du systme pneumatique est suprieure ou gale
5 bars. Un autre capteur (EPO) vrifie si la Partie Oprative est
convenablement ali-mente lectriquement. Si lun ou lautre des
capteurs est un niveau logique 0, un arrt durgence doit tre gnr
automatiquement. Un bouton de type coup de poing identifi AU permet
de gnrer aussi un arrt durgence.
Lorsque larrt durgence survient, il doit y avoir une coupure
immdiate de lalimentation lectrique et pneumatique de la Partie
Oprative, puis un gyrophare doit tre allum. Loprateur doit alors
mettre le slecteur de mode en position INIT et demander au
technicien de venir faire le diagnostic de la panne et de la
solutionner.
Une fois la panne rpare, loprateur doit ramasser les pices
coinces, dsactiver le bouton darrt durgence, puis remettre la
puissance lectrique et pneumatique sur la machine. Une fois
lalimentation lectrique et la pression pneumatique de retour,
loprateur procdera linitialisation de la machine.
-
Exercices sur le GEMMA
Ilian Bonev (2006) Page 18 de 18
Mise en nergie de la Partie Commande
Lors de la mise en nergie de la Partie Commande, loprateur devra
mettre le slecteur de mode en position INIT, puis mettre la
puissance lectrique et pneumatique sur la machine avant de
linitialiser.
Mise hors nergie de la Partie Commande
Lors de la mise hors nergie de la Partie Commande, il faudra
prendre soin de couper la puis-sance lectrique et pneumatique sur
la machine.
laide du GRAFCET dj tabli (figure 20), construire le GEMMA de
cet automatisme, enri-chir le GRAFCET, et dessiner le panneau de
commande.
Source : S. Moreno et E. Peulot, Le GEMMA : Modes de marches et
darrts , Educalivre, Paris, France, 1997.