Embed Size (px)
Citation preview

1
Ⅰ. Série TemporelleⅡ. Processus stationnaire
Ⅲ.Modèle ARMAⅣ. Modélisation de Box et Jenkins
Ⅴ.Application
TANG Liyun et QIAN Yuan
EXPOSE ORAL ------ Modèle ARMA

2
Ⅰ. S. S. S. Séééérie Temporelle rie Temporelle rie Temporelle rie Temporelle � Ⅰ.1 D.1 D.1 D.1 Dééééfinition finition finition finition : � une série temporelle est une suite de nombres réels , indexés
par les entiers relatifs tels que le temps. Pour chaque instant du temps, la valeur de la quantité é tudiée Xt est appelée variable aléatoire. L'ensemble des valeurs Xt quand t varie est appelé processus aléatoire
{Xt , }Tt∈

Ⅰ. S. S. S. Séééérie Temporellerie Temporellerie Temporellerie Temporelle� Ⅰ.1.1.1.1 D D D Dééééfinition finition finition finition � Une série temporelle est une suite de nombres réels, indexés par
les entiers relatifs tels que le temps . Pour chaque instant du temps , la valeur de la quantit é étudiée Xt
est appelée variable aléatoire . L'ensemble des valeurs X t quand t varie est appelé processus aléatoire
{ Xt , }Tt∈

� Ⅰ.2 Domaine d.2 Domaine d.2 Domaine d.2 Domaine d’’’’applicationapplicationapplicationapplication
� en astronomie (’on the periodicity of sunspots’, 1906), � en météorologie ( ’ time-seires regression of sea level on
weather ’, 1968)� en théorie du signal (’Noise in FM receivers’, 1963) � en biologie ( ’ the autocorrelation curves of schizophrenic
brain waves and the power spectrum’, 1960)� en économie (’time-series analysis of imports, exports and
other economic variables’, 1971)...etc.

5
En astronomie (‘on the periodicity of sunspots’, 1906)

6
� Ⅰ.3 Objectif .3 Objectif .3 Objectif .3 Objectif
� Modéliser les mouvements de la série temporelle à partir de
son histoire et des valeurs présentes et passés d’un Bruit Blanc
avec un modèle linéaire .

2013-3-21
� Ⅰ....4444 Hist Hist Hist Histoireoireoireoire 1927 1927 1927 1927 G.U.Yule -- modG.U.Yule -- modG.U.Yule -- modG.U.Yule -- modèèèèle ARle ARle ARle AR 1931 G.T.Walker 1931 G.T.Walker 1931 G.T.Walker 1931 G.T.Walker –––– mod mod mod modèèèèle MA et modle MA et modle MA et modle MA et modèèèèle ARMAle ARMAle ARMAle ARMA 1970 G.E.P.Box 1970 G.E.P.Box 1970 G.E.P.Box 1970 G.E.P.Box et G.M.Jenkinset G.M.Jenkinset G.M.Jenkinset G.M.Jenkins(BoxBoxBoxBox————JenkinsJenkinsJenkinsJenkins) 《Time Series Analysis Forecasting and ControlTime Series Analysis Forecasting and ControlTime Series Analysis Forecasting and ControlTime Series Analysis Forecasting and Control》 1982 ARCH 1982 ARCH 1982 ARCH 1982 ARCH 1985 GARCH 1985 GARCH 1985 GARCH 1985 GARCH

8
Ⅱ. . . . Processus stationnaire
� Ⅱ. 1 conception de stationnarit. 1 conception de stationnarit. 1 conception de stationnarit. 1 conception de stationnaritéééé La stationnarité joue un rôle central dans la théorie des processus
�Processus fortement stationnaire(ou au sens strict) : la distribution de probabilité est invariante par translation de l’axe du temps�Processus faiblement stationnaire (ou stationnaire à l’ordre 2) :
permanence des deux premiers moments (conditions utilisées en pratique)
ZtXXCTtEXTtEX
tt
t
t
∈∀=∈∀=∈∀∞<
+ k, ),ov()3 ,)2,)1
,kk
2
γµ

9
�Ⅱ. 2 . 2 . 2 . 2 CaractCaractCaractCaractééééristiques d'une sristiques d'une sristiques d'une sristiques d'une séééérie temporelle rie temporelle rie temporelle rie temporelle
� Fonction d’autocovariance :
� Fonction d’autocorrélation(ACF)
� Fonction d’autocorrélation partielle (PACF) :
)(ov kttk += XXC ,γ
Z∈= k , 0
kk γ
γρ
)()(
)(*
hh
hX ℜ
ℜ=ψ .
1...........................
...1
)(
21
11
−−
−
=ℜ
hh
h
h
ρρ
ρρ
avec
obtenue en remplaçant la dernière colonne de R(h) par le vecteur)(* hℜ [ ]hρρρ ,...., 21'

10
� Ⅱ. . . . 3333 Exemple de processus stationnaire : Exemple de processus stationnaire : Exemple de processus stationnaire : Exemple de processus stationnaire : Bruit blanc

11
1, ≥∀=− pxBx tp
pt
)!(!!,)1()1(
)(,)()(
1
0
11
1
0
ininCBCB
xxByxyxB
xcxBcxcBB
in
in
i
in
in
nttn
tttt
ttt
−=−=−
=
±=±⋅=⋅=⋅
=
∑=
−
−−
−
Ⅲ.1.2 Opérateur retard, noté B
Ⅲ.1 .1 .1 .1 OOOOppppéééérateur retardrateur retardrateur retardrateur retard Ⅲ.1.1 Différence
1−−=∇ ttt xxx
111
−−− ∇−∇=∇ t
pt
pt
p xxxktttk xxx −−=∇
Ⅲ.Modèle ARMA

12
it
p
i
ip
it
pt
p xCxBx −=∑ −=−=∇
0)1()1(
Ⅲ....1.1.1.1.3 3 3 3 AAAAppliquer lppliquer lppliquer lppliquer l’’’’opopopopéééératratratrateureureureur retard retard retard retard
tk
ktttk xBxxx )1( −=−=∇ −

13
Ⅲ....2 2 2 2 Cas particulier : AR(p)
⎪⎪
⎩
⎪⎪
⎨
⎧
<∀=≠===
≠
+++++= −−−
tsExtsEVarE
xxxx
ts
sttt
p
tptpttt
,0,0)(,)(0)(
02
22110
εεεσεε
φ
εφφφφ
ε,
L
ttxB ε=Φ )(
ppBBBB φφφ −−−−=Φ L2
211)(

14
� Propriété
)( 110 tptptt xxEEx εφφφ ++++= −− L
TtEEx tt ∈∀== ,0)(, εµ
pφφφ
µ−−−
=L1
0
1

15
� Fonction d’autocovariance
)()()()( 11 kttktptpkttktt xExxExxExxE −−−−−− +++= εφφ L
0)( =−ktt xE ε
LL ,2,1,2211 =+++= −−− kpkpkkk γφγφγφγ
)ar(X t0 V=γ

16
Fonction d’autocorrélation
0γγ
ρ kk =
LL ,2,1,2211 =+++= −−− kpkpkkk ρφρφρφρ

17
� Fonction d’autocorrélation partielle
�
])ˆ[()]ˆ)(ˆ[(
2ktkt
ktktttkk xExE
xExxExE
−−
−
−−−
=φ
⎪⎪⎩
⎪⎪⎨
⎧
+++=
+++=+++=
−−
−
−
02211
202112
112011
ρφρφρφρ
ρφρφρφρρφρφρφρ
kkkkkkk
kkkkk
kkkkk
L
LLLLLLLL
L
L
pkkk >= ,0φ

18
Ⅲ.3 Cas particulier : MA(q)
tt Bx ε)(Θ=q
q BBBB θθθ −−−−=Θ L2211)(

19
� Propriété
µ
εθεθεθεµ
=
−−−−+= −−− )( qtqtttt EEx L2211
2221
2211
)1(
)()(
εσθθ
εθεθεθεµ
q
qtqtttt VarxVar
+++=
−−−−+= −−−
L
L

20
� Études des autocovariance
⎪⎪
⎩
⎪⎪
⎨
⎧
>
≤≤+−
=+++
= ∑−
=+
q k
qk
kkq
iikik
q
k
,0
1 ,)(
0 ,)1(
2
1
2221
ε
ε
σθθθ
σθθ
γ
L
kγ

21
Le Corrélogramme
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
>
≤≤+++
+−
=
=∑−
=+
qk
qk
k
q
kq
iikik
k
,0
1 ,1
0 ,1
221
1
θθ
θθθρ
L
Si q<∞,MA(q) stationnaire

22
� Le corrélogramme de MA(q) s’annule à partir de q+1
0car
)1()1(
)()(
)(
])[(
),,|()]}(ˆ)][(ˆ{[
0
22q
21
022
q2
1
0
0
11
≠
+++
−=
+++
−=
−=
−−
∑
∑∑
∑
∞
=+
∞
=+
∞
=−−−+−
−
−−−
∞
=+
+−−−
−−
llkl
llkl
lktkltklktt
kt
ktkltl
klt
kttkt
ktkttt
I
IxxEIxE
xVar
xxIE
xxxVarxExxExE
γ
σθθ
γ
σθθ
ε
ε
LL
L

Ⅲ.4 Modèle ARMA� Ⅲ.4.1 Définition générale Un processus stationnaire Xt suit un ARMA(p,q) s'il vérifie la relation suivante :
2013-3-21
⎪⎪⎩
⎪⎪⎨
⎧
≠≠
−−−++++= −−−−
)0(~
002
11110
εσε
θφ
εθεθεφφφ
,
,
BB
XXX
t
qp
qtqttptptt LL

24
� En introduisant l'opérateur retard, la relation s'écrit :
avec
et
tt LXL ε)()( Θ=Φ
pp LLLL φφφ −−−−=Φ L2
211)(
qqLLLL θθθ −−−−=Θ L2
211)(

25
� Ⅲ.4.2 La thLa thLa thLa thééééororororèèèème de Woldme de Woldme de Woldme de Wold� Une version simple du théorème de Wold :
Soit T réalisations d’un processus stationnaire centré.
et avec et tels que
� tout processus (Xt) stationnaire peut se mettre sous forme MA(∞),
{ }TttX 1=
),0(~ 2εσε BBt∃ ),,,( 210 Lδδδ∃
10 =δ 0lim =∞→
iiδ
ti
itit LX εδεδ )(0
==∑∞
=−

� Approximation fractionnelle du thApproximation fractionnelle du thApproximation fractionnelle du thApproximation fractionnelle du thééééororororèèèème de Woldme de Woldme de Woldme de Wold
Soit et
avec
Le processus peut être réécrit sous la forme
ou : modélisation ARMA(p,q) de
qqLLL θθθ +++= L11)( p
pLLL φφφ −−−= L11)(
)()()(
LLL
φθδ ≈
tt LLX ε
φθ
)()(
=
tX
tt LXL εθφ )()( =
tX
�ARMA:approximation de l’écriture MA(∞)

27
� Remarque : un modèle ARMA stationnaire et inversible peut toujours se réécrire sous la forme d’un modèle AR ou d’un modèle MA
� Cas particuliers � ARMA(p,0) ou AR(p) : � ARMA(0,q) ou MA (q) : � ARMA(0,0) : bruit blanc
ttt XX εφ += −11
11 −−= tttX εθε

28
Ⅳ. Modélisation de Box et Jenkins
� Stationnarisation et Dessaisonalisation� Identification� Estimation� Validation et Test� Prévisions

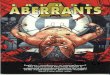
� Ⅳ.1 .1 .1 .1 Stationnarisation et DessaisonalisationStationnarisation et DessaisonalisationStationnarisation et DessaisonalisationStationnarisation et Dessaisonalisation Ⅳ.1.1 Tests de la stationnarit.1.1 Tests de la stationnarit.1.1 Tests de la stationnarit.1.1 Tests de la stationnaritéééé � Pour vérifier la stationnarité : plusieurs méthodes Examen visuel de la série
Calculs de la moyenne et de la variance sur des sous ensembles de la serie et tests d’égalité Analyse visuelle de la décroissance de la fonction d’autocorrélation Tests de recine unité (Dickey-Fuller, …)
2013-3-21
Pas stationnaire stationnaire

� Tests de recine unitTests de recine unitTests de recine unitTests de recine unitéééé ————————identification de lidentification de lidentification de lidentification de l’’’’ordre dordre dordre dordre d’’’’intintintintéééégration des sgration des sgration des sgration des sééééries ries ries ries
� Le test de Dickey & Fuller propos de tester 3 situations1. H0:yt est un pure RW
ttt yy εαρ +=− −1
2. H0:yt est un RW avec dérive
1:0 =ρH
01:0 =−= ραH
3. H0:yt est un RW avec trend et dérive
01:0 =−== ρβαH
ttt yy ερ =− −1 ttt yy ερ +−=∆ −1)1(
ttt yy ερα +−+=∆ −1)1(
ttt tyy εβαρ ++=− −1 ttt yty ερβα +−++=∆ −1)1(

� Le test de Dickey & Fuller Augmenté H0 : est intégré d’ordre au moins 1 H1 : le processus suit un modèle AR(p)
� Compléments sur les tests de racine unité� Tests de Phillips et PerronIls proposent une correction non paramétrique des deux
statistique des test de Dickey et Fuller
ttyLA ε=)(
tt tyLA εβα ++=)(ttyLA εα +=)(
0)1(:0 =AH
0)1(:0 ==αAH
0)1(:0 === βαAH

Série stationnaire Série non stationnaire en moyenne
Série non stationnaire en variance

33
Ⅳ.1. 2 Transformation stationnarisante d.1. 2 Transformation stationnarisante d.1. 2 Transformation stationnarisante d.1. 2 Transformation stationnarisante d’’’’un un un un processus non stationnaire processus non stationnaire processus non stationnaire processus non stationnaire
� La s La s La s La séééérie non stationnairerie non stationnairerie non stationnairerie non stationnaire
� processus TS(Trend stationary) processus TS(Trend stationary) processus TS(Trend stationary) processus TS(Trend stationary) présente une non stationnarité de nature déterministe
Yt − f(t) = Zt stationnaire� processus DS (Difference stationnary) processus DS (Difference stationnary) processus DS (Difference stationnary) processus DS (Difference stationnary) présente une non
stationnarité de nature stochastique (1 − L)dYt = Zt stationnaire

� Ⅳ.1.2.1.2.1.2.1.2 Si la série n’est pas stationnaire, il faut la stationnariser par une méthode adaptée Processus TS Processus TS Processus TS Processus TS Xt = f(t) + Et avec f(t) = fonction déterministe du temps, Et :stationnaire Décomposition tendance déterministe - fluctuations Exemples fréquents : - Trend linéaire : - Tend quadratique : - Trend polynomial :
- Trend exponentiel : 2013-3-21
tX t 1βα +=
221 ttX t ββα ++=
nnt tttX βββα ++++= L2
21
tLogXLogeX Trendt
tt βαα β +=⇒= )()(

� Décomposition saisonnalité déterministe - fluctuations Modèle sans tendance :
Modèle avec tendance :
∑=
+=s
ittiit uDX
1,γ
∑=
++=s
ittiit uDtX
1,γβ

� Processus DSProcessus DSProcessus DSProcessus DS� Les plus utilisées : � La différence d’ordre d : ∆dXt = (1-B)dXt
� Trend stochastiqueTrend stochastiqueTrend stochastiqueTrend stochastique
� SaisonnalitSaisonnalitSaisonnalitSaisonnalitéééé stochastique stochastique stochastique stochastique
� SSSSééééries avec trend et saisonnalitries avec trend et saisonnalitries avec trend et saisonnalitries avec trend et saisonnalitéééé stochastiques stochastiques stochastiques stochastiques
)0(~)( 1 IXXX ttt −−=∆
)0(~)( IXXX StttS −−=∆
)()( )1)(1(
11 −−−− −−−=−−=∆∆
SttStt
tS
tS
XXXXXLLX

37
Ⅳ.2 .2 .2 .2 Identification� Objectif : déterminer d, p, q� Outils d’identification : � ACF� PACF� Fonction d’autocorrélation inverse� Méthode du coin � Critères d’information AIC� la fonction d’autocorrélation étendue (Tsay, & Ciao)� Méthode ’SCAN…

� ACF et PACF
ACFACFACFACF PACFPACFPACFPACF
AR(p)AR(p)AR(p)AR(p) ddddéééécroissance croissance croissance croissance ggggééééomomomoméééétrique vers 0trique vers 0trique vers 0trique vers 0
ϕϕϕϕkkkkkkkk=0=0=0=0pour k>ppour k>ppour k>ppour k>p
MA(q)MA(q)MA(q)MA(q) ρρρρkkkk=0 =0 =0 =0 pour k>qpour k>qpour k>qpour k>q
ddddéééécroissance croissance croissance croissance ggggééééomomomoméééétrique vers 0trique vers 0trique vers 0trique vers 0
ARMA(p,q)ARMA(p,q)ARMA(p,q)ARMA(p,q) ddddéééécroissance croissance croissance croissance ggggééééomomomoméééétrique vers 0trique vers 0trique vers 0trique vers 0
ddddéééécroissance croissance croissance croissance ggggééééomomomoméééétrique vers 0trique vers 0trique vers 0trique vers 0

� Critères d’information AIC
� - Estimation de tous les modèles ARMA(p,q) pour et
�On retient la forme ARMA(p, q) qui minimise au choix l’un des deux criteres AIC ou BIC suivants ( )
critere AIC : critere BIC :
)/)ˆ(ˆ 22 Ttt εσ Σ=
TqpqpAIC )(2ˆlog),( 2 +
+= σ
TTqpqpBIC )log()(ˆlog),( 2 ++= σ
maxpp ≤maxqq ≤

40
Ⅳ.3.3.3.3 Estimation� L’estimateur du maximum de vraisemblanceH1 on suppose que la population des résidus {εt} peut être
décrite par un processus bruit blanc gaussien Ν(0,σ2ε).
Écrivons alors la vraisemblance associée au vecteur de réalisation (χ1,χ2, …… χT).

41
Ⅳ.4 .4 .4 .4 Validation et Test
Test sur les résidus� Test d’absence d'autocorrélation des résidus le test de Box-Pierce le test de Ljung-Box le test de Durbin-Watson� Test d’homoscédasticité le test de Goldfield et Quandt le test de White le test de Breusch et Pagan� Estimation récursive et analyse de la stabilité du modèle

42
Ⅳ.4.4.4.4 Validation et Test � Test d’absence d'autocorrélation des résidus
� le test de Box-Pierce et le test de Ljung-Box
Statistics :Box-Pierce ∑
=
=h
kkh TQ
1
2ρ̂
~ ∑= −
+=′h
k
kh kT
TTQ1
2ˆ)2(
ρ
p>0.05, la série est statistiquement un bruit blanc
Ljung-Box )(2 hχ

4343
Ⅳ.4.4.4.4 Validation et Test � Test d’absence d'autocorrélation des résidus� le test de Durbin-Watson H0 : ρ=0 H1 : il existe d’autocorrélation statistics :
Avec et la série de résidu, T est le nombre d’observation

44
� Tests de normalité: Bera & Jarque (1984)notonsμk le moment d’ordre k de la distribution Coefficient du skewness et de la kurtosis
statistics:
[ ] ))(( kk XEXE −=µ
2/323 / µµ=s 2
24 / µµ=k
on rejette l’hypothèse H0 de normalité des résidus au seuil α)2(21 αχ−≥BJ

45
� Estimation rEstimation rEstimation rEstimation réééécursive et analyse de la stabilitcursive et analyse de la stabilitcursive et analyse de la stabilitcursive et analyse de la stabilitéééé du mod du mod du mod du modèèèèlelelele� Estimation récursive du modèle sur les sous-échantillons :
t = 1,…,T*; t = 1, …, T*+1; …., t = 1,…,T-1
� Calcul des résidus récursifs (one-step ahead forecast error)
� On peut démontrer le résultats suivant :
avec et
� Résidus récursifs normalisés
t = T *,…,T-1
� Statistique du CUSUM :
t = T *,…,T-1
� Calcul d’un Intervalle de confiance pour le CUSUM à partir des bornes tabulées de la statistique
∗++
∗+ −= ttttt yy ,11,1ε
),0(~ 2,1 ttt rN σε ∗+ 1>tr 1lim =
∞→tt
r
)1,0(~,1,1 N
r
iid
t
tttt σ
εω
∗+
+ =
∑=
+=t
TtCUSUM
*,1
τττω

4646
Ⅳ.5.5.5.5 Prévisions
⎩⎨⎧
≤≥
=
⎪⎩
⎪⎨
⎧
>−++−
≤−−++−=
−−−+++=
+
=−+
−−+−++−+−+
∑
0,1,)(ˆ
)(ˆ
,)(ˆ)1(ˆ
,)(ˆ)1(ˆ
),,()(ˆ
1
1
11111
kxkkx
kx
qkpkxkx
qkpkxkx
xxxxEkx
kt
tt
tpt
q
kiiktitpt
ttqktqktktpktpktt
φφ
εθφφ
εθεθεφφ
L
L
LLL
221
21
20 )()]([ εσ−+++= kt GGGkeVar L

Incertitude associée aux prévisions� Critère de pouvoir prédicitf
� Critère d’information � Test s d’anticipations rationnelles� Limite de prédictibilité d’un modèle ARMA� les prévisions hors échantillon des modèles ARMA convergent
vers la moyenne non conditionnelle du processus. � On peut calculer la limite de prédictibilité� Expliquer et présenter
2013-3-21

Incertitude associée aux prévisions� Critère de pouvoir prédicitfPlusieurs indicateurs sontalors possibles :� (i) la variance du résidu σ2, ou la somme des carrés des
résidus SCR� (ii) le coefcient de détermination R2, correspondant à
une normalisation de la variance� (iii) le coefficient de détermination modifié adjust-R2� (iv) la statistique de Fisher (comme dans le cas du
modèle linéaire)� Le but est alors de minimiser (i), ou de maximiser (ii) ;
(iii) ou (iv).
2013-3-21

Incertitude associée aux prévisions
� Critère d’information
� Évaluation de plusieurs prévisionscomparer la précision de prévisions non optimales:� l’erreur de prévision � l’erreur de prévision en pourcentage
2013-3-21
TqpqpAIC )(2ˆlog),( 2 +
+= σ
TTqpqpBIC )log()(ˆlog),( 2 ++= σ
ththttht yye ,, +++ −=
ht
ththttht y
yyp
+
+++
−= ,
,

50
�Critères Mean Error (ME) et Error Variance (EV): : mesure du biais (faible avec une « bonne prévision ») : dispersion des erreurs de prévisions (faible avec une « bonne prévision »)�Mesures globales de la précision des prévisions: MSE et MSPE
�Des variantes de ces indicateurs (RMSE et RMSPE) permettent de préserver les unités des grandeurs prévues :
�Autres mesures : MAE et MAPE
∑=
+=T
tthte
TMSE
1
2, )(1
∑=
+=T
tthtp
TMSPE
1
2, )(1
MSERMSE = MSPERMSPE =
∑=
+=T
tthte
TMAE
1,
1∑=
+=T
tthtp
TMAPE
1,
1
∑=
+=T
tthte
TME
1,
1
∑=
+ −=T
ttht MEe
TEV
1
2, )(1

Ⅴ.Application
Modèle ARMA pour données des employés Canadian�1961:1 1994:4

� Identification du modèle par AICAIC analysis of models for series CAEMP




� Identification du modèle par corrélogramme

57


59
� ProlongementProlongementProlongementProlongement du du du du modmodmodmodèèèèlelelele ARMA ARMA ARMA ARMA
ARIMA(p,d,q) SARIMA(p,d,q)(P,D,Q)s
tt LXLL ε)()1)(( d Θ=−Φ
tt LLXLLLL ε)()()1()1)(()( sQq
DsdsPp ΘΘ=−−ΦΦ

60
� ProlongementProlongementProlongementProlongement du du du du modmodmodmodèèèèlelelele ARMAARMAARMAARMA� ARFIMA: processus à mémoire longue ARFIMA(p,d,q) :
� TARMA: processus à seuil
où u1t et u2t sont deux bruits blancs de variance respective σ21et σ2
2
� FARMA: ∆dXt suivent un processus ARMA(p, q) où d n’est pas entier, compris entre -1/2 et 1/2
� ARCH : processus avec la variance évolué dans le temps, notamment pour les problèmes monétaire et financière