Embed Size (px)
Citation preview

DQAL-0034 Ind. A 1
Les réseaux embarqués
Expérience et témoignage d'une PME/ETI
Bruno BAUDOTArchitecte systèmes é[email protected] mardi 7 décembre 2010
DQAL-0034 Ind. A 2
• Introduction : présentation Adetel Group
• Notre expérience des réseaux CAN embarqués
• Mise en œuvre FLEXRAY sur ECU
• Conclusion
Sommaire
DQAL-0034 Ind. A 3
• Introduction : présentation Adetel Group
• Notre expérience des réseaux CAN embarqués
• Mise en œuvre FLEXRAY sur ECU
• Conclusion
Sommaire
DQAL-0034 Ind. A 4
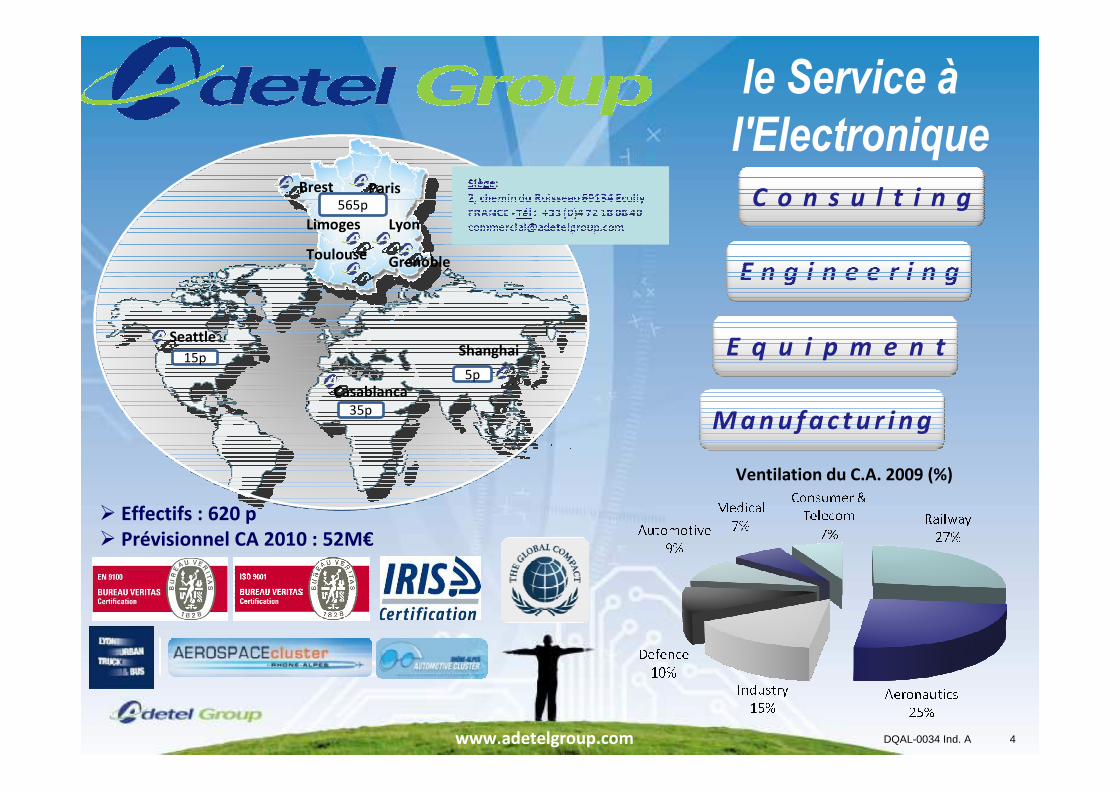
le Service à
l'Electronique
www.adetelgroup.com
565p
Brest Paris
LyonLimoges
GrenobleToulouse
Seattle
15p
Casablanca
Shanghai
35p
5p
� Effectifs : 620 p� Prévisionnel CA 2010 : 52M€
Ventilation du C.A. 2009 (%)
Manu fac tu r i ng
E q u i p m e n t
C o n s u l t i n g

DQAL-0034 Ind. A 5
Adetel et l'automobile Introduction
Capteur automobile
Équipement de localisationGPS 2ème monte
DémonstrateurX-by-Wire
Simulateurs et systèmes Hardware In the Loop
Validation de fonctionnalités de calculateurs moteurs
Ce projet est cofinancé par
l’Union européenne.
L’Europe s’engage en Rhône
Alpes avec le FEDER.
Dispositif anti-renversement passif
Surveillance vigilance
Intégration calculateurs COTS bus CAN & J1587Spécification,Paramétrage, validation
DQAL-0034 Ind. A 6
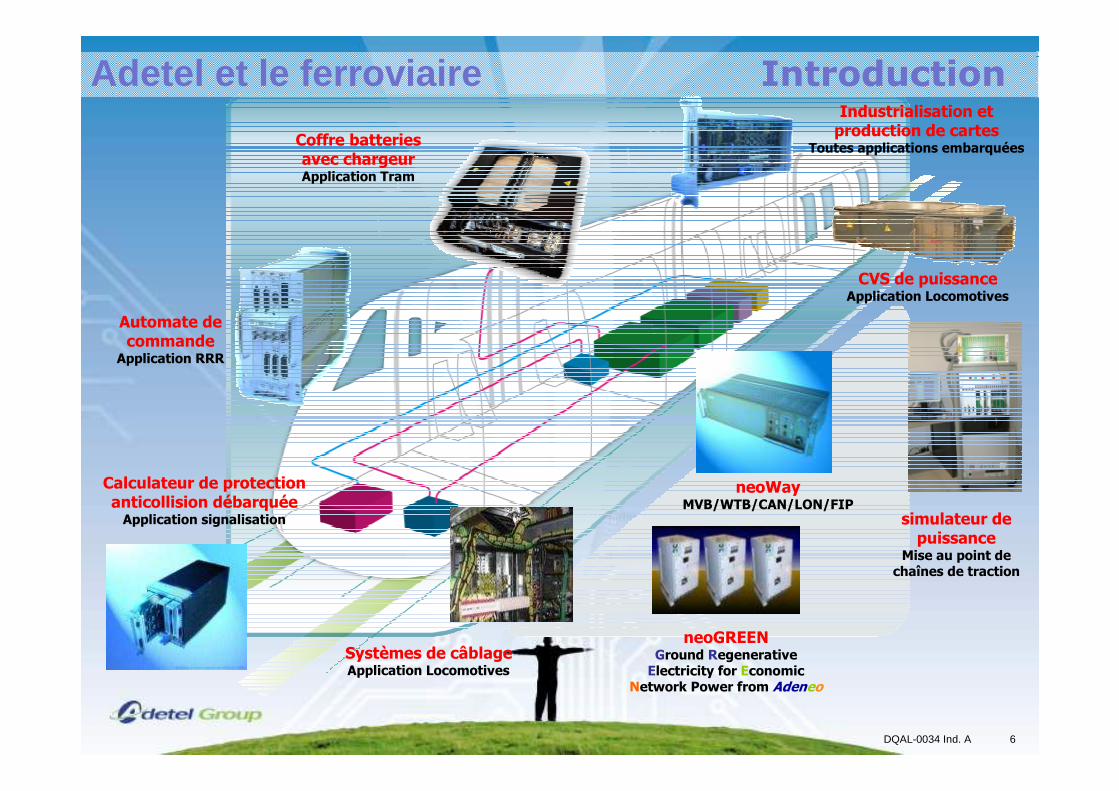
Coffre batteries avec chargeurApplication Tram
Automate de commande
Application RRR
CVS de puissanceApplication Locomotives
Systèmes de câblageApplication Locomotives
Industrialisation et production de cartes
Toutes applications embarquées
simulateur de puissance
Mise au point de chaînes de traction
neoWayMVB/WTB/CAN/LON/FIP
Calculateur de protection anticollision débarquéeApplication signalisation
neoGREENGround Regenerative Electricity for Economic
Network Power from Adeneo
Adetel et le ferroviaire Introduction
DQAL-0034 Ind. A 7
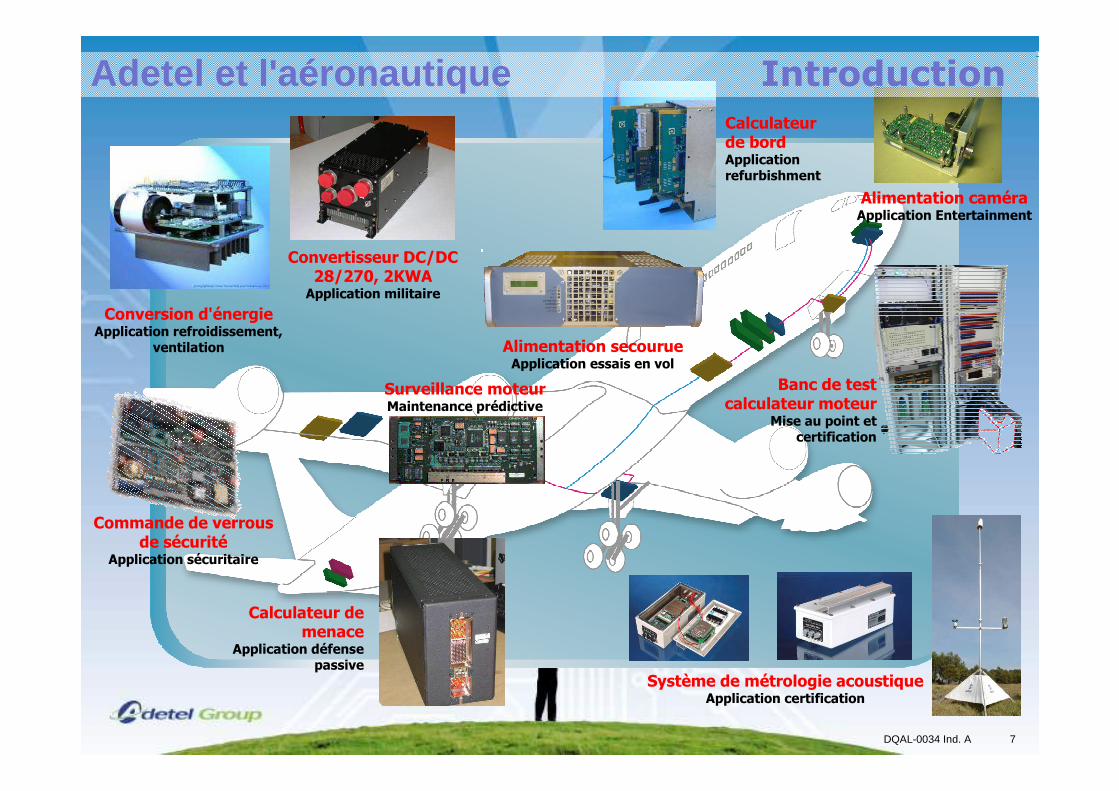
Calculateurde bordApplication refurbishment
Commande de verrous de sécurité
Application sécuritaire
Conversion d'énergieApplication refroidissement,
ventilation
Banc de test calculateur moteur
Mise au point et certification
Alimentation secourueApplication essais en vol
Système de métrologie acoustiqueApplication certification
Calculateur de menace
Application défense passive
Convertisseur DC/DC 28/270, 2KWAApplication militaire
Alimentation caméraApplication Entertainment
Adetel et l'aéronautique Introduction
Surveillance moteurMaintenance prédictive
DQAL-0034 Ind. A 8
Sommaire
• Introduction : présentation Adetel Group
• Notre expérience des réseaux CAN embarqués
• Mise en œuvre FLEXRAY sur ECU
• Conclusion
DQAL-0034 Ind. A 9
� Industrie� Banc de test automatique des distributeurs de pressions
hydrauliques pour des engins de travaux public
• Utilisation CAN : bus de commande : consignes débit/pression
• Environnement PC carte PCI CAN et LabWindows/CVI (DLL C++ interface CAN)
• Réseau CAN 2.0A/500kbps
� Disjoncteur à ouverture en moins de 300 µs suite à court-circuit entre deux phases (courant > 1600A)
• Utilisation CAN : bus de supervision électronique de commande
• Environnement Freescale 68HC912 + noyau RTOS CMX
• Réseau CAN 2.0A/125 kbps
Bus CAN : des exemples d’utilisation
DQAL-0034 Ind. A 10
�Aéronautique� Carte surveillance moteur embarqué dans FADEC d’avion
militaire
• Utilisation : bus de maintenance
• Environnement : Analog Device ADSP – logiciel DO178B sécuritaire
• Réseau CAN 2.0B/500kbps
� Onduleur de ventilation A380 5KVA
• Utilisation : bus commande (consigne flux d’air)
• Environnement : TI TMS320 – logiciel DO178B sécuritaire
• Réseau CAN 2.0A/125 kbps
Bus CAN : des exemples d’utilisation
DQAL-0034 Ind. A 11
� Ferroviaire� Système embarqué tramway pour récupération/restitution
d’énergie de freinage à base de Super Condensateurs (1,6KWh)• Utilisation de 2 réseaux CAN : mesure tensions/T° C
cellules super condensateurs & commande de 4 cartes de contrôle/commande de CVS
• Environnement : Noyau µC/OS-II sur DSP Freescale56F83xx et Microchip PIC 18F
• Réseaux CAN 2.0B/500kbps
Bus CAN : des exemples d’utilisation
� Système embarqué tramway chargeur de batteries 15kW/24V
• Utilisation bus CAN redondée: bus interface calculateur train ( modes de marche et consignes courant/tension)
• Environnement : RTOS eCos sur FPGA Cyclone3 SoCAltera NIOSII
• Réseau CAN redondé 2.0A / 125 kbps
DQAL-0034 Ind. A 12
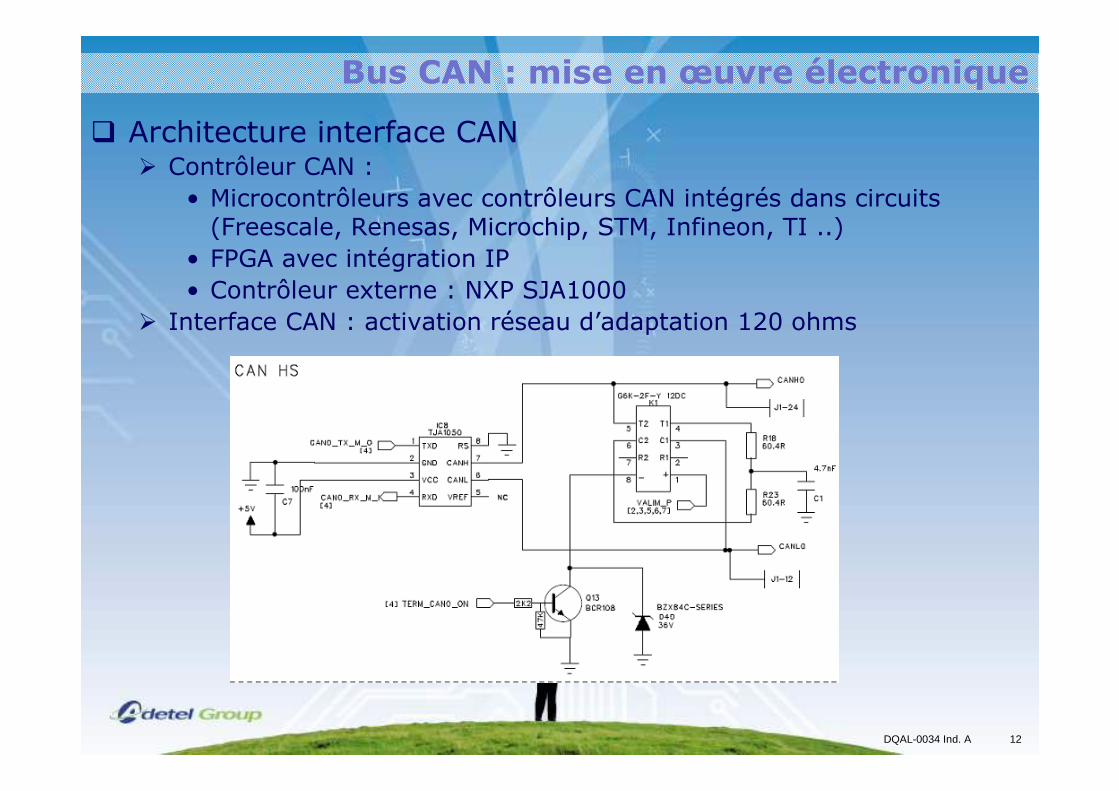
� Architecture interface CAN� Contrôleur CAN :
• Microcontrôleurs avec contrôleurs CAN intégrés dans circuits (Freescale, Renesas, Microchip, STM, Infineon, TI ..)
• FPGA avec intégration IP
• Contrôleur externe : NXP SJA1000
� Interface CAN : activation réseau d’adaptation 120 ohms
Bus CAN : mise en œuvre électronique
DQAL-0034 Ind. A 13
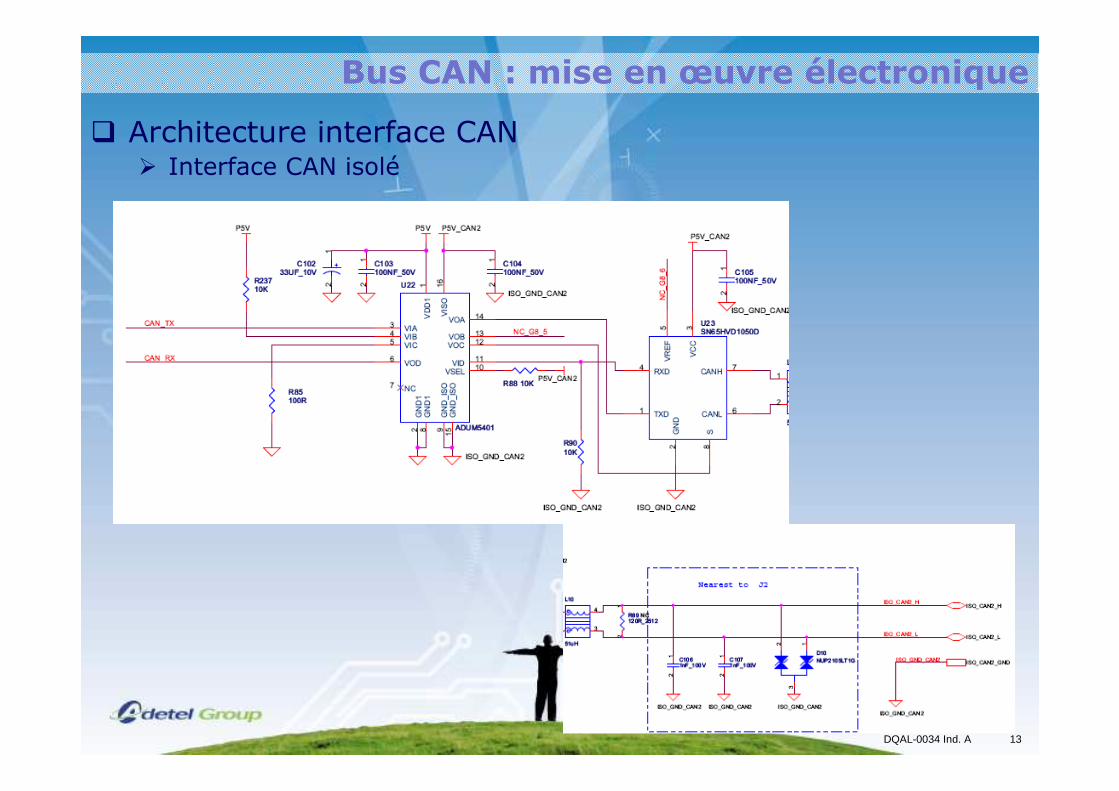
� Architecture interface CAN� Interface CAN isolé
Bus CAN : mise en œuvre électronique
DQAL-0034 Ind. A 14
• Introduction : présentation Adetel Group
• Notre expérience des réseaux CAN embarqués
• Mise en œuvre FLEXRAY sur ECU
• Conclusion
Sommaire
DQAL-0034 Ind. A 15
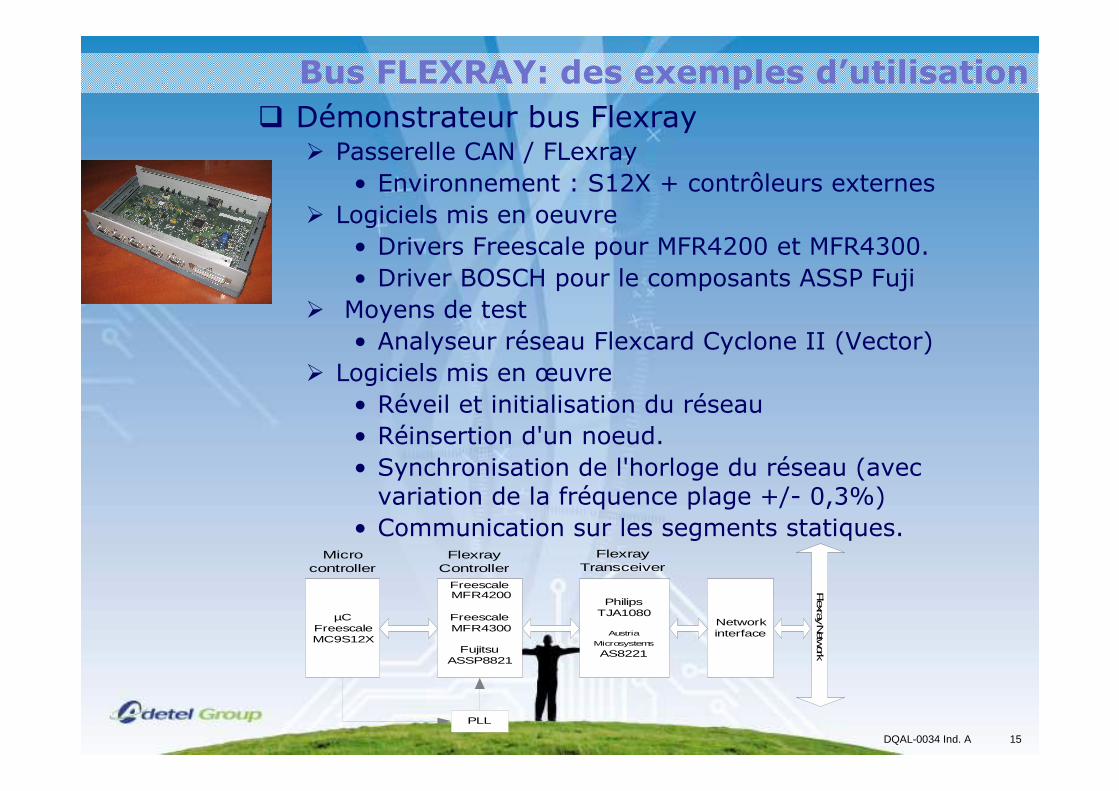
� Démonstrateur bus Flexray� Passerelle CAN / FLexray
• Environnement : S12X + contrôleurs externes
� Logiciels mis en oeuvre
• Drivers Freescale pour MFR4200 et MFR4300.
• Driver BOSCH pour le composants ASSP Fuji
� Moyens de test
• Analyseur réseau Flexcard Cyclone II (Vector)
� Logiciels mis en œuvre
• Réveil et initialisation du réseau
• Réinsertion d'un noeud.
• Synchronisation de l'horloge du réseau (avec variation de la fréquence plage +/- 0,3%)
• Communication sur les segments statiques.
Bus FLEXRAY: des exemples d’utilisation
µCFreescaleMC9S12X
FreescaleMFR4200
FreescaleMFR4300
FujitsuASSP8821
PhilipsTJA1080
Austria
Microsystems
AS8221
Networkinterface
Flexray N
etwork
PLL
Microcontroller
FlexrayController
FlexrayTransceiver
DQAL-0034 Ind. A 16
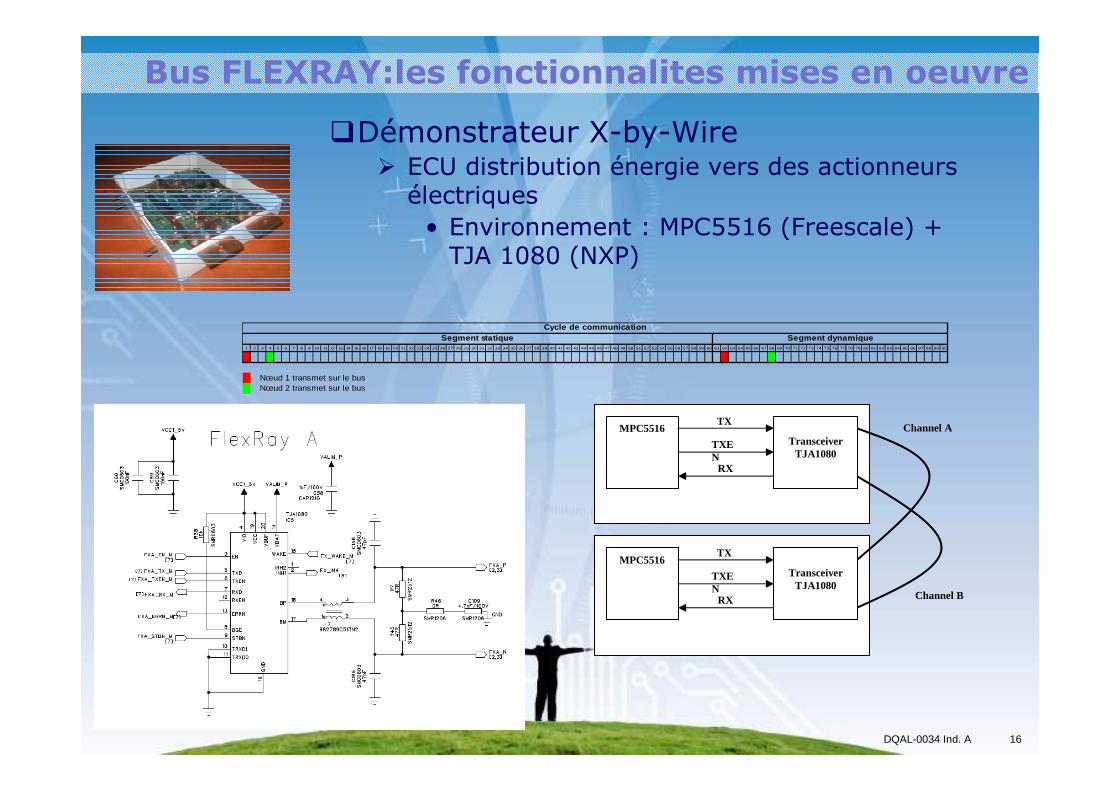
�Démonstrateur X-by-Wire� ECU distribution énergie vers des actionneurs
électriques
• Environnement : MPC5516 (Freescale) + TJA 1080 (NXP)
Bus FLEXRAY:les fonctionnalites mises en oeuvre
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90
Nœud 2 transmet sur le bus
Segment statique Segment dynamiqueCycle de communication
Nœud 1 transmet sur le bus
MPC5516Transceiver
TJA1080RX
TX
TXEN
MPC5516Transceiver
TJA1080RX
TX
TXEN
Channel A
Channel B
DQAL-0034 Ind. A 17
• Introduction : présentation Adetel Group
• Notre expérience des réseaux CAN embarqués
• Mise en œuvre FLEXRAY sur ECU
• Conclusion
Sommaire
DQAL-0034 Ind. A 18
• CAN• Robustesse dans environnement embarqué
• Mise en œuvre simple et offres fondeurs multiples
• Débit adapté au contrôle commande et à la maintenance
• Pas utilisé comme bus sécuritaire avion (ARINC429, AFDX MIL-STD-15543) et trains (TORNADE, FIP MVB et Ethernet redondé)
• Possibilités d’intégration de couches normalisés (CAN-OPEN) ou messagerie personnalisée
• FLEXRAY• Bus pas encore déployé dans les véhicules
• Alternative au réseau CAN pour offrir débits de 10Mb/s
• Evaluations dans monde aéronautique
• Utilisable pour des applications sécuritaire
• Cout fonctions du même ordre que CAN
Conclusion

DQAL-0034 Ind. A 19
ADETEL est, bien sur, à votre disposition pour intégrer ses bus dans vos produits !!
Conclusion
Contacts:
Bruno BAUDOT [email protected]
Patrick PINEDRE [email protected]