Embed Size (px)
Citation preview

Mécanique & Industries 3 (2002) 93–98
Faisabilité en emboutissage : optimisation du matériau par surfacede réponse
Feasibility in deep drawing: optimization of material properties usingresponse surface
Arnaud Delamézière∗, Hakim Naceur, Piotr Breitkopf, Catherine Knopf-Lenoir,Jean-Louis Batoz, Pierre Villon
Laboratoire Roberval, UMR UTC-CNRS, Université de Technologie de Compiègne, BP 20529, 60205 Compiègne cedex, France
Reçu le 15 novembre 2001; accepté le 7 décembre 2001
Résumé
Cette communication concerne l’optimisation des propriétés du matériau pour des pièces obtenues en emboutissage. Deux propriétés dumatériau sont considérées, l’exposant d’écrouissagen (de la loi d’Hollomon) et le coefficient d’anisotropie moyenr. Une fonction objectif,visant le contrôle des défauts est définie. Son but est d’éviter toute rupture et de contrôler le plissement. Le risque de rupture est détectégrâce à la Courbe Limite de Formage (CLF). Un facteur de risque de plissement a été développé dans notre laboratoire [9]. L’optimisationest effectuée par une méthode utilisant une surface de réponse construite sur un nombre limité d’évaluations de la fonction objectif. Cettesurface est interpolée localement par approximation diffuse. 2002 Éditions scientifiques et médicales Elsevier SAS. All rights reserved.
Abstract
This paper deals with the optimization of the material properties of thin sheets obtained by deep-drawing. Two material parameters areconcerned, the strain-hardening exponentn (of the Hollomon law) and the average anisotropic coefficientr. Two objective functions aredefined to control the forming defects (failure and wrinkling). The risk of failure is detected through the Forming Limit Curve. A wrinklingrisk factor has been developed in our laboratory [9]. The thickness variation allows also to detect both risks. The optimization is done by amethod using a response surface built on a limited number of evaluations of the objective function. This surface is locally interpolated withthe diffuse approximation method. 2002 Éditions scientifiques et médicales Elsevier SAS. All rights reserved.
Mots-clés : Emboutissage ; Propriétés du matériau ; Courbe limite de formage ; Détection du plissement ; Optimisation ; Éléments finis ; Surface de réponse ;Approximation diffuse ; Approche inverse
Keywords: Deep drawing; Material properties; Forming limit curve; Detection of wrinkling; Optimization; Finite elements; Response surface; Diffuseapproximation; Inverse approach
1. Introduction
La simulation numérique de l’opération d’emboutissageest utilisée dans l’industrie dans le but de réduire au mi-nimum la phase de mise au point expérimentale. Deux fa-
* Correspondance et tirés à part.Adresses e-mail : [email protected] (A. Delamézière),
[email protected] (H. Naceur), [email protected] (P. Breitkopf),[email protected] (C. Knopf-Lenoir), [email protected](J.-L. Batoz), [email protected] (P. Villon).
milles de codes co-existent. Les codes incrémentaux (dy-namique explicite ou statique implicite) donnent des résul-tats précis. Les codes simplifiés permettent une estimationrapide des grandes déformations élasto-plastiques. Depuis1987, une approche simplifiée, l’Approche Inverse (AI) aété développée à l’UTC [1]. L’AI a ensuite été couplée avecun code d’optimisation (BFGS) pour déterminer les para-mètres du procédé, le contour du flan initial [1,2] et lesforces de retenue dues aux joncs [3]. Ce travail concernela recherche du matériau « idéal » pour une géométrie de
1296-2139/02/$ – see front matter 2002 Éditions scientifiques et médicales Elsevier SAS. All rights reserved.PII: S1296-2139(02 )01144-2

94 A. Delamézière et al. / Mécanique & Industries 3 (2002) 93–98
Nomenclature
d distance d’un point du DLF à la CLFfe risque de plissement pour un élémentf0 rapport entre les épaisseurs initiales à l’intérieur
et à l’extérieur de l’imperfectionh épaisseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . mmJ fonction objectif globaleJ1 fonction objectif détectant le risque de ruptureJ2 fonction objectif pour le contrôle du risque de
plissementK module de la loi d’Hollomon . . . . . . . . . . . . MPar coefficient d’anisotropie moyenR rayon de courbure . . . . . . . . . . . . . . . . . . . . . . mms marge de sécuritéw risque de plissement acceptable
Symboles grecs
α rapport de contrainteε déformation
ε accroissement de déformationσ contrainte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . MPaσy contrainte limite d’élasticité . . . . . . . . . . . . . MPaρ rapport d’accroissement de déformation
Indices
1 direction principale2 direction principalea concerne une variable à l’extérieur de l’im-
perfectionb concerne une variable à l’intérieur de l’im-
perfection
Exposants
a exposant non quadratique du critère de plasticitéde Hosford
n exposant d’écrouissage de la loi d’Hollomon
pièce donnée. Deux paramètres du matériau sont considéréscomme variables de conception pour l’optimisation, l’expo-sant d’écrouissagen (de la loi d’Hollomon) et le coefficientd’anisotropie moyenr.
La méthode utilisée dans cette communication est diffé-rente de celle utilisée précédemment [1–3]. Cette nouvelleméthode est basée sur la construction d’une surface de ré-ponse à partir d’un nombre limité d’évaluations de la fonc-tion objectif. L’optimisation est appliquée sur cette surfacede réponse et non sur la fonction objectif. La vitesse des cal-culs de l’AI et de la fonction objectif permet une évaluationde cette surface dans un temps raisonnable.
Il faut définir le concept de pièces sans défauts. Lasimulation numérique ne peut pas mettre en évidence lesdéfauts de surface. Mais les défauts volumiques [4], commela rupture, l’amincissement local excessif, les plis, lescloques et le non-respect des tolérances dimensionnellessont détectables. Dans la suite de cette communication, piècesans défauts signifiera une pièce pour laquelle les risques derupture et de plissement seront contrôlés.
2. Fonction objectif
2.1. Contrôle de la rupture
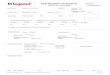
Durant la mise au point d’une gamme d’emboutissageexpérimentale, le risque de rupture est apprécié grâce àl’utilisation de la Courbe Limite de Formage (CLF) et duDiagramme Limite de Formage (DLF). La CLF est définiedans le plan des déformations principales (ε2, ε1) (Fig. 1).Expérimentalement, la méthode la plus utilisée consiste àtracer un réseau de cercles sur le flan initial. L’évolution
de la déformation d’un de ces cercles pour différentesprofondeurs de poinçon permet de connaître le chemin dedéformations du point du flan étudié. La rupture a lieu ence point lorsque les déformations (ε2, ε1) sont sur la CLF.Si nous considérons tous les cercles, nous obtenons le DLF.De manière identique en simulation numérique, avec uncode incrémental nous pouvons suivre l’évolution du DLFconstitué des déformations principales pour chaque élémentet avec un code simplifié connaître le DLF équivalent audéplacement total du poinçon.
Dans le cadre de l’AI, la rupture est détectée si un pointdu DLF est au-dessus de la CLF (Fig. 1). Nous définissonsalors une fonction objectifJ1 :
J1 =∑nelt
{(s − d)2 si (s − d) > 00 sinon
(1)
oùnelt est le nombre d’éléments,d la distance entre un pointdu DLF et la CLF et s la marge de sécurité.
Nous cherchons à optimiser les propriétés du matériau.Elles vont donc varier durant les calculs. La CLF dépendantdes propriétés du matériau, nous devons être capable de laprédire pour chaque nouveau couple(n, r). Pour cela nousutilisons la théorie développée par Graf et Hosford [5,6],basée sur la croissance d’une imperfection.
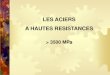
La géométrie de l’imperfection est présentée sur la Fig. 2.La géométrie initiale est définie parf0 qui est le rapportentre les épaisseurs initiales à l’intérieur et à l’extérieur del’imperfection. L’imperfection est et restera perpendiculaireaux axes de chargement.
Dans la suite,σ symbolise une contrainte, ε un acrois-sement de déformation, les indices 1 et 2 la direction et lesindices a et b si il s’agit d’une quantité à l’extérieur ou àl’intérieur de l’imperfection.

A. Delamézière et al. / Mécanique & Industries 3 (2002) 93–98 95
Fig. 1. CLF, DLF, et définition de la distanced et de la marge de sécurités.
Fig. 1. FLC, FLD, and definition of the distanced and of the safetymargins.
Fig. 2. Modèle géométrique pour le calcul de la CLF.
Fig. 2. Geometrical model for the prediction of the FLC.
L’équilibre de la pièce se traduit par :
• La continuité des efforts le long de la direction 1 :
σ1aha = σ1bhb (2)
oùh est l’épaisseur.• La continuité des accroissements de déformation suivant
l’axe 2 à l’extérieur et à l’intérieur de l’imperfection :
ε2a= ε2b (3)
Le calcul de la CLF se fait point par point. Une défor-mation initiale peut-être prise en compte (εini
2 , εini1 ). Pour un
point, nous fixons le rapportρ :
ρ = ε2a
ε1a(4)
Nous imposons alors un incrément de déformation ε1b.La résolution du système d’équations non linéaires constituédes deux équations d’équilibre 2 et 3 et de la relation decomportement donne comme résultat l’accroissement ε1a
correspondant à ε1b imposé. Les autres déformations sontaussi calculées, ce qui permet d’actualiser la géométrie etd’imposer un nouvel incrément ε1b. La rupture a lieulorsque toute la déformation se passe dans l’imperfection :
ε1a
ε1b→ 0 (5)
Le calcul d’un autre point de la CLF s’effectue enchangeant le rapportρ dans la procédure précédente.
Graf et Hosford ont utilisé cette procédure pour prédireles CLF dans la région des déformationsε2 positives [5,6].Zhao et al. [7] l’ont étendue à des valeurs négatives deε2.
En comparant la CLF calculée avec une courbe expéri-mentale, il apparaît qu’une meilleure prédiction est donnéeen utilisant un critère de plasticité développé par Hosford [6]et qui s’exprime en contraintes planes et anisotropie normalepar :
|σ1|a + |σ2|a + r|σ1 − σ2|a = (r + 1)σ ay (6)
où σ1 et σ2 sont les contraintes principales,σy la contraintelimite d’élasticité et a un exposant pair.
Graf et Hosford [5] et Zhao et al. [7] utilisenta = 6pour les métaux dont le réseau cristallin est un cubiquecentré et a = 8 pour les cubiques face centrée. Pouraccroître la précision de cette méthode, des chercheurs ontproposé d’utiliser un modèle dont l’imperfection présenteune inclinaison par rapport à l’axe de chargement [8].Nous avons remarqué qu’un changement d’exposanta
(a = 10) pour les déformationsε2 négatives apporte la mêmeamélioration.
2.2. Contrôle du risque de plissement
Un pli est la conséquence d’un flambement de la tôle.Une condition nécessaire au flambement est un état decompression. La condition de compression est :
ε1 < − r + 1
rε2 (7)
Cette condition est trop restrictive pour être utilisée dans unefonction objectif.
Brunet et al. [9] s’inspirant des travaux de Hutchinson,Neale et Tugcu [10,11], ont développé un critère simplepour estimer le risque de plissement dans une coque courbedéformée. Le facteur de risque de plissement est calculéen prenant en compte la géométrie actuelle et l’état decontraintes. Les hypothèses suivantes ont été utilisées parHutchinson, Neale et Tugcu :
• configuration déformée (coque à doubles courburesconstantes et d’épaisseur constante),
• état de contrainte plan uniforme de membrane (caracté-risation par les deux contraintes principales),
• phénomène de flambage plastique soumis au critère debifurcation plastique de Hill,
• théorie de la déformation plastique totale appliquée lorsdu flambement,

96 A. Delamézière et al. / Mécanique & Industries 3 (2002) 93–98
• interactions outils-pièce négligées,• plissement localisé (dimensions de la coque et condi-
tions aux limites ne sont pas prises en compte),• plis de faible longeur d’onde : utilisation de la théo-
rie des coques minces surbaissées (Donnell–Mushtari–Vlasov).
Brunet et al. ont ajouté des hypothèses supplémentairespour réduire le nombre d’inconnues du problème et sa nonlinéarité :
• Dans le repère des contraintes principales, une portionde coque est susceptible de plisser si au moins une deces contraintes principales est négative.
• Le rapport des contraintes principales ne varie pas entrel’état de préflambage et l’étape de bifurcation plastique.
Le problème est toujours fortement non linéaire. Larésolution itérative présente un coût élevé sans être assuréde la convergence.
Pour une étude qualitative, Brunet et al. ont supposé enoutre que :
• Les axes principaux des courbures et les axes descontraintes principales sont confondus.
Le problème peut alors être résolu analytiquement. Pourun état de contrainte défini par le rapport :
α = σ2
σ1(8)
connaissant la géométrie de la tôle par son épaisseurh etles rayons de courburesR1 et R2, nous calculons alors unecontrainte critiqueσ cr
1 :
σ cr1 = K
[1+ r√
3(1+ 2r)
(h
R2
)√n(α′)1−1/n
]n
α′ =√
1− 2rα
1+ r+ α2
(9)
oùK est le module de la loi d’Hollomon.Pour un élément le risque de plissement est défini par :
fe = σ1
σ cr1
(10)
où σ1 est la contrainte principale de compression au pointconsidéré. Un risque existe pourfe plus grand que un.
Le modèle d’Hutchinson et Neale est aussi utilisé pourtracer un diagramme limite de plissement (Wrinkling LimitDiagram, WLD) dans l’espace des déformations principales(ε2, ε1) par Kim et Son [12]. Ce diagramme, qui correspondplus à la définition de courbe, limite l’espace libre dedéfaut. Mais Hutchinson et Neale [10] et Améziannne-Hassani et Neale [13], qui ont développé la théorie durisque de plissement mettent en exergue le rôle significatifde la courbure locale sur les conditions de plissement. Pourprendre en compte cet aspect, il faudrait donc tracer un WLDpour chaque point de la pièce.
Nous avons décidé de rester au niveau de l’élément oùnous comparons le risque de plissementfe à un facteur derisque de plissement acceptablew.
Une fonction objectifJ2 est définie sur l’ensemble de lapièce :
J2 =∑nelt
(fe − w
w
)2
si fe ≥ w
0 sinon
(11)
Le contrôle des risques de rupture et de plissement se faitpar la fonctionJ :
J = J1 + J2 (12)
Remarquons queJ1 etJ2 sont sans dimension.
3. Résolution du problème d’optimisation
3.1. Principe des méthodes de surface de réponse
Nous avons choisi d’utiliser la méthode de surface deréponse pour trouver l’optimum. Cette méthode, issue destechniques de plans d’expériences, consiste à construire toutd’abord une expression approchée de la fonction objectifJ ,explicite en fonction des variablesn et r. Cette fonction,notée J , est réalisée à partir du calcul préalable de lafonctionJ pour un nombre limité de valeurs(n, r) appeléespoints d’évaluation, choisis par l’utilisateur en fonctionde la méthode d’approximation utilisée (splines, moindrescarrés. . .). Ce calcul nécessite pour chaque point une analyseéléments finis du procédé d’emboutissage par l’AI.
L’approximation J est ensuite minimisée, et non lafonction réelle. L’intérêt de cette démarche est d’utiliser,pour la recherche du minimum, une fonction très rapide àévaluer, puisque l’approximation est explicite. De plus, ilest possible de séparer l’étape de minimisation et l’étapede simulation du procédé, ce qui facilite le contrôle de laconvergence des analyses non linéaires.
En règle générale, le minimum de l’approximation est en-suite déterminé itérativement, mais dans notre travail, nousdéfinissons une surface de réponse originale, basée sur l’ap-proximation diffuse [14], et nous lui associons un algorithmede minimisation spécifique, utilisant les propriétés de l’ap-proximation diffuse. L’approximation diffuse est construitelocalement, dans l’application suivante, huit points d’éva-luations sont utilisés pour calculerJ à chaque itération. Parconstruction la fonctionJ est continue sur l’ensemble dudomaine. La grille d’évaluation de la fonctionJ ne néces-site pas d’être régulière pour construireJ . L’ajout de pointsdans la grille est possible et permet alors d’améliorer l’ap-proximationJ .
La procédure d’optimisation consiste à minimiser l’ap-proximationJ construite au voisinage des valeurs initialesdes variables. Pour le minimum de cette fonction, une nou-velle approximationJ est alors réalisée, et la procédure estrépétée jusqu’à convergence. Cette méthode est présentée etcommentée sur un exemple dans le paragraphe suivant.

A. Delamézière et al. / Mécanique & Industries 3 (2002) 93–98 97
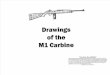
Fig. 3. Points d’évaluation de la fonction objectif et trajectoire de conver-gence de la méthode.
Fig. 3. Evaluation points of the cost function and convergence path of themethod.
3.2. Application sur un cas académique
Parmi les cas-tests, expérimentaux et numériques, propo-sés à Numisheet’93, l’emboutissage d’une boîte carrée étaitdemandé avec deux matériaux distincts, un aluminium (n =0,3593, r = 0,6425) et un acier (n = 0,2637 etr = 1,77).
Expérimentalement, cet aluminium ne permet d’emboutirque des boites dont la profondeur est inférieure à 20 mm. Eneffet une rupture apparaît pour cette profondeur. Nous avonsdonc créé un modèle éléments finis pour une boîte emboutieavec un déplacement de poinçon de 23 mm. La marge desécurité au niveau de la CLF est des = 0,05.
Pour représenter graphiquement la méthode nous avonséchantillonné la fonction objectif sur une grille 51× 51(Fig. 3,n compris entre 0,1 et 0,5 etr entre 0,5 et 4,0). Ladémarche est la suivante :
• Une grille d’évaluation de la fonction coût est prévue audépart, ce qui signifie que le calcul exact de la fonctioncoût (par simulation numérique de l’emboutissage) nesera fait qu’en certains de ces points. Ici une grille12× 12 a été choisie.
• Le point de départ choisi est l’aluminium (point 1,Fig. 3).
• Chaque itération consiste en deux étapes :– une surface de réponse est construite en utilisant les
huit plus proches voisins du point courant,– le point suivant est le minimum de cette surface de
réponse.• Un test d’arrêt vérifie l’évolution de la fonction objectif
exacte (elle doit être nulle pour que le matériau soitadmissible), et la procédure est renouvelée jusqu’àconvergence. L’algorithme mène ainsi à la constructiond’un échantillonnage adaptatif de la fonction objectif.
Fig. 4. CLF et DLF pour les propriétés obtenues à l’itération 7.
Fig. 4. FLD and FLD for the material parameters obtained at iteration 7.
Tableau 1Valeurs des propriétés pour les itérations successives
Table 1Values of the material parameters during iterations
Itération n r Faisabilité
1 0,3593 0,6425 Non2 0,3428 0,7618 Non3 0,3105 0,8767 Non4 0,2824 0,7124 Non5 0,2754 0,6340 Non6 0,2513 0,8334 Non7 0,1943 1,9391 Oui
Les résultats sont reportés graphiquement sur la Fig. 3 ;les points 1 à 6 ne sont pas admissibles, la solution est ob-tenue après 7 itérations. Compte tenu du recouvrement desvoisinages, seuls 26 points (indiqués par les croix sur laFig. 3) ont été pris en compte dans l’algorithme, à compareravec 48 évaluations nécessaires avec un algorithme d’opti-misation (BFGS) n’utilisant pas de surface de réponse. Nousrappelons que la grille fine(51× 51) n’a servi qu’au tracédes lignes de niveau, et pas à l’optimisation, qui utilise lagrille 12× 12.
Le Tableau 1 présente les paramètres matériaux obtenuspar les itérations successives. Les valeurs de la fonctionapprochéeJ en ces points permettent de savoir si cesmatériaux satisfont ou non nos critères d’admissibilité. Lespropriétés de l’itération 7 sont utilisées ensuite dans uncalcul d’AI pour calculer la CLF et le DLF. Les résultatssont présentés Tableau 2 et Fig. 4.
Certains points du DLF (représenté par des triangles)sont au-dessus de la courbe située à une distance s de 0,05(traits continus). Mais ils sont sous la CLF (traits continuset carrés pleins). Le risque de plissement est inférieur à 5.Le résultat respecte donc trop le fait que les facteurs derisque de plissement doivent être inférieurs à 5 et pas assezle fait que le DLF doit être sous la CLF. Ceci provient dufaible poids deJ1 par rapport àJ2 dansJ , et sera résolu enréécrivantJ :
J = αJ1 + βJ2 (13)

98 A. Delamézière et al. / Mécanique & Industries 3 (2002) 93–98
Tableau 2Risque de plissement et variation d’épaisseur pour les différentes propriétés
Table 2Wrinkling risk factors and thickness variations for different material properties
Matériau n r Critère de plissement maximal hmin hmax Nombre évaluations deJ Itérations
Aluminium de Numisheet’93 0,3593 0,6425 10,4 −35,60% 16,16%Diffus 0,1943 1,939 3,81 −9,73% 11,07% 26 7BFGS 0,2390 1,950 5,00 −9,96% 10,84% 16+ 2× 16 12Acier de Numisheet’93 0,2637 1,770 5,85 −10,08% 9,46%
avec les poidsα etβ réglés correctement.Le point de convergence tend vers les propriétés de
l’acier de Numisheet, dont nous savons qu’il permet deréaliser une pièce avec un déplacement de poinçon de40 mm.
4. Conclusion
L’utilisation d’une surface de réponse permet de trouverun matériau admissible dans le cadre du formage paremboutissage. Pour la fonction objectif proposée dans cetravail, la solution n’est cependant pas unique. En effet,plusieurs matériaux permettent de réaliser la pièce. Le critèrechoisi ne les différencie pas. La méthode de la surface deréponse permettra, grâce à son faible coût, d’identifier ledomaine des matériaux admissibles. Un critère de choixsupplémentaire devra être intégré dans la démarche enfonction de l’application choisie : coût de la mise en forme,contrôle du retour élastique, résistance aux sollicitations àl’usage. . .
La méthode couplée avec la modélisation permet detrouver une approximation du minimum à un coût moindreque les méthodes classiques. D’autre part elle permet deséparer la phase d’analyse de celle d’optimisation.
Références
[1] Y.Q. Guo, J.L. Batoz, H. Naceur, S. Bouabdallah, F. Mercier, O. Bar-let, Recent developments on the analysis and optimum design of sheetmetal forming parts using a simplified inverse approach, Computersand Structures 78 (1–3) (2000) 133–148.
[2] O. Barlet, H. Naceur, J.L. Batoz, C. Knopf-Lenoir, Shape optimumdesign of blank contours using a simplified inverse approach, in :Proceedings of the 6th Int. Conf. on Numerical Methods in IndustrialForming Processes, Numiform’98, University of Twente, Enschede,Hollande, 1998, pp. 801–807.
[3] H. Naceur, Y.Q. Guo, J.L. Batoz, C. Knopf-Lenoir, Optimisation desforces de retenue pour le contrôle de la qualité des tôles mincesembouties, Revue européenne des éléments finis 9 (1–2–3) (2000)151–172.
[4] E. Felder, Tribologie de l’emboutissage, Techniques de l’IngénieurB 7535 (1994).
[5] A. Graf, W.F. Hosford, Calculations of Forming Limit Diagrams, Met.Trans. 21A (1990) 87–94.
[6] W.F. Hosford, R.M. Caddell, Metal Forming Mechanics and Metal-lurgy, 2nd ed., Prentice Hall, New York, 1993.
[7] L. Zhao, R. Sowerby, M.P. Sklad, A theoretical and experimentalinvestigation of limit strains in sheet metal forming, Int. J. Mech.Sci. 38 (1996) 1307–1317.
[8] D. Lee, J.R. Zaveri, Neck growth and forming limits in sheet metals,Int. J. Mech. Sci. 24 (1982) 157–173.
[9] S. Brunet, J.L. Batoz, S. Bouabdallah, Sur l’évaluation des risquesde plissement local de pièces industrielles obtenues par emboutissage,in : Actes du 3èmeColloque National en Calcul des Structures, Giens,France, 1997, pp. 753–758.
[10] J.W. Hutchinson, K.W. Neale, Wrinkling of curved thin sheet, in :International Symposium on Plastic Instability, Paris, France, 1985,pp. 71–78.
[11] K.W. Neale, P. Tugcu, A numerical analysis of wrinkle formationtendencies in sheets metals, Int. J. Numer. Methods Engrg. 30 (1990)1595–1608.
[12] Y. Kim, Y. Son, Study on wrinkling limit diagram of anisotropic sheetmetals, J. Mat. Process. Technol. 97 (2000) 88–94.
[13] H. Ameziane-Hassani, K.W. Neale, On the analysis of sheet metalwrinkling, Int. J. Mech. Sci. 33 (1991) 13–90.
[14] B. Nayroles, G. Touzot, P. Villon, Using the diffuse approximationfor optimizing the location of anti-sound sources, J. Sound Vibra-tion 171 (1) (1994) 1–21.