Embed Size (px)
Citation preview

Ann. Scient. Éc. Norm. Sup.,4e série, t. 33, 2000, p. 301 à 320.
FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉSDE FINITUDE DES GROUPES
PAR MIHAI DAMIAN
ABSTRACT. – Let Mn a closed, connected manifold,n > 6. Denote by Nov(M ) and Novst(M ) theminimal number of zeros of a generic closed one-form defined onM , resp. the minimal number of zeros ofa generic closed one-form onM ×Rk which is almost quadratic at infinity.
Under an assumption on the Bieri–Neumann–Strebel and Bieri–Renz invariants ofπ1(M ), we show theimplication Novst = 0⇒ Nov = 0. If we drop this assumption, the implication above turns out to be falsein general. In fact, our assumption is closely related to the implicationFP2⇒F2, therefore, it’s in somesense optimal.
Applications in Novikov homology theory and in symplectic topology are given. 2000 Éditionsscientifiques et médicales Elsevier SAS
RÉSUMÉ. – SoitMn une variété différentielle compacte et connexe,n > 6. On note par Nov(M ) etNovst(M ) respectivement le nombre minimal de zéros d’une 1-forme fermée non-dégénérée surM et celuid’une 1-forme fermée non-dégénérée et presque quadratique à l’infini surM ×Rk.
Si les invariants de Bieri–Neumann–Strebel et de Bieri–Renz associés au groupe fondamental deMsatisfont une certaine condition, on montre l’implication Novst = 0⇒ Nov = 0. On construit des exemplesde variétés pour lesquelles l’implication ci-dessus n’est pas vraie ; en fait la condition sur les invariants BNSet BR est liée à l’implicationFP2⇒F2. Elle est donc optimale dans un certain sens.
Comme application, on montre une propriété d’ouverture de l’homologie de Novikov, ainsi qu’un résultatde disjonction symplectique dans le fibré cotangent. 2000 Éditions scientifiques et médicales ElsevierSAS
1. Introduction
Soit M une variété compacte et connexe de dimensionn. Toute fonction réelle surM ades points critiques. Plus précisément, le nombre de points critiques d’une fonction générique(appelée aussi fonction de Morse) est minoré par la somme des nombres de Betti deM via lesinégalités de Morse. Ces inégalités restent valables pour les fonctions de Morsef :M ×Rk→Rqui sontquadratiques à l’infini— c’est-à-dire égales à une forme quadratique non-dégénérée àl’extérieur d’un compact deM ×Rk [13]. Donc, si on note parµ(M ) (resp.µst(M )) le nombreminimal de points critiques d’une fonction générique sur la variétéM (resp. quadratique à l’infinisurM ×Rk), on a l’inégalité :
µ(M )> µst(M )>∑i
βi(M )(1)
oùβi sont les nombres de Betti deM .
ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE. – 0012-9593/00/03/ 2000 Éditions scientifiques etmédicales Elsevier SAS. All rights reserved
302 M. DAMIAN
PourM simplement connexe de dimension supérieure ou égale à 6 S. Smale a montré l’égalitéµ(M ) = µst(M ) [35]. Ce résultat a été généralisé par Sharko [30,31] pour certaines classes devariétés non simplement connexes. Mais la question générale reste ouverte.
Le même problème peut être posé pour des 1-formes fermées. Dans [26] S. Novikov introduitune notion d’homologie associée à une 1-classe de cohomologie réelle dans le but de généraliserles inégalités de Morse dans le cas des 1-formes fermées. D’après ces inégalités, dites de Morse–Novikov, le nombre de zéros d’une 1-forme fermée non-dégénéréeα appartenant à une classeu∈H1(M ; R) est supérieur au rang de la partie libre de l’homologie de NovikovH∗(M ;u).
Une 1-forme ferméeα surM ×Rk est ditepresque quadratique à l’infinisi la différence entreα et la différentielle d’une forme quadratique non-dégénéréeQ surRk est bornée en norme.
Comme précédemment, les inégalités de Morse–Novikovpersistent pour des 1-formes ferméesgénériques surM × Rk qui sont presque quadratiques à l’infini. En particulier, si Nov(M ) etNovst(M ) sont respectivement le nombre minimal de zéros d’une 1-forme fermée non-dégénéréesurM et le nombre minimal de zéros d’une 1-forme fermée non-dégénérée presque quadratiqueà l’infini surM ×Rk, on aura :
Nov(M )>Novst(M )> minu∈H1(M ;R)
rg(H∗(M ;u)
).(2)
Le but de ce article est de répondre à la question suivante :
Q: Sous quelles hypothèses a-t-on Novst(M ) = 0⇒Nov(M ) = 0?
Notre motivation pour aborder ce problème réside dans le fait qu’il est lié à une question detopologie symplectique : trouver des conditions nécessaires pour que la section nulle 0M du fibrécotangentT ∗M puisse être disjointe d’elle-même par une isotopie symplectique (voir l’énoncédu Th. 1.4 ci-après).
L’implication ci-dessus est vraie pourn 6 2 et pourn = 3 etM irréductible [37,6,38]. Engrande dimension,n > 6, elle a été démontrée par J.-C. Sikorav [32] pourπ1(M ) = Z, puisgénéralisée par A. Pajitnov [27] pourπ1(M ) =H × Z, sous une certaine hypothèse.
Notre résultat améliore les précédents pourn> 6 : on montre l’implication Novst(M ) = 0⇒Nov(M ) = 0 sous une hypothèse plus faible qui porte sur les invariants de Bieri–Neumann–Strebel et de Bieri–Renz associés au groupeG = π1(M ). Ces invariants, notésΣi(G) etΣi(G; Z), sont des sous-ensembles ouverts de la sphère unitéS(G) = (Hom(G; R) \ 0) /R∗+.Si u :G→ Z, dire que±u∈Σi(G; Z) (ou±u ∈Σi(G)) équivaut à une condition de finitude surKer(u) (voir Théorème 4.1). La définition de ces invariants sera rappelée en §4.
Voici les énoncés des résultats principaux :
THÉORÈME 1.1. – SoitMn une variété compacte connexe de dimensionn> 6. On supposeaussi que les deuxièmes invariants de Bieri–Renz et de Bieri–Neumann–Strebel associés àπ1(M )vérifient l’inclusion [
Σ2(π1(M ); Z
)∩−Σ2
(π1(M ); Z
)]⊂Σ2(
π1(M )).(∗)
AlorsNovst(M ) = 0⇒Nov(M ) = 0.
Des exemples de groupes qui vérifient la condition (∗) sont donnés en §4.1. Le résultat qui suitmontre que cette condition ne peut pas être supprimée dans l’énoncé du Théorème 1.1. En faitelle est optimale dans un certain sens puisque l’égalité des invariantsΣ2(G; Z) etΣ2(G) étaitune conjecture avant qu’elle ne soit infirmée par les résultats récents de Bestvina et Brady [2].
4e SÉRIE– TOME 33 – 2000 –N 3
FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉS DE FINITUDE DES GROUPES 303
PROPOSITION 1.2. – Pour toutn> 8 il existe une variété compacte et connexeMn telle queNovst(M ) = 0 et Nov(M ) 6= 0.
Dans un travail ultérieur je montrerai que pourn> 6 l’égalité Nov(M ) = Novst(M ) est vraie
si on renforce la condition (∗) en :Σ2(π1(M )) = S(π1(M )). Je pense que cette dernière condition
peut être encore améliorée ; cependant elle est satisfaite par beaucoup de groupes, dont parexemple ceux qui admettent au moins un morphismeG→R non nul sur le centreZ(G).
On énonce maintenant deux applications du Théorème 1.1. La première est une propriétéd’ouverture de l’homologie de Novikov :
PROPOSITION 1.3. – L’ensemble des classesu∈H1(M ; R) dont l’homologie de Novikov estnulle est un ouvert deH1(M ; R) (pour la topologie standard).
Voici le résultat de disjonction symplectique qui était envisagé. Il est également conséquencedu Théorème 1.1, via la théorie des formes génératrices des sous-variétés lagrangiennes deT ∗M .
THÉORÈME 1.4. – SoitMn une variété compacte connexe de dimensionn > 6 et dont legroupe fondamental vérifie la condition(∗). Sur le fibré cotangentT ∗M on considère la formesymplectique standardωM = dλM . Les affirmations suivantes sont équivalentes:
(i) Il existe une isotopie symplectique(Φt)t∈[0,1] partant de l’Identité qui vérifie
Φ1(0M )∩ 0M = ∅
où0M est l’image de la section nulle deT ∗M .(ii) Il existe une fibrationp :M → S1.
On voit facilement que la condition (ii) est équivalente à Nov(M ) = 0 : ce résultat est connusous le nom de théorème de Tischler [39].
Le texte est structuré comme suit :Dans le paragraphe 2 on rappelle un théorème de Latour qui sera l’ingrédient principal pour
la démonstration du Théorème 1.1. Il donne en grande dimension des conditions algébriquesnécessaires et suffisantes que doit vérifier une 1-classe de cohomologie réelle surM pourqu’elle contienne une forme non-dégénérée sans zéro. On généralise ce théorème et on obtientune caractérisation algébrique de Novst(M ) = 0. On utilise ces résultats pour montrer laProposition 1.3.
Le paragraphe 3 est consacré à la construction d’un contre-exemple qui démontre laProposition 1.2.
Dans le dernier paragraphe on prouve le Théorème 1.1 et son application symplectique 1.4.
2. Le théorème de Latour
2.1. Énoncé et conséquences
On s’intéresse aux classesu qui peuvent être représentées par une forme non-singulière (i.e.sans aucun zéro). L’ensemble de ces classes est un cône ouvert dansH1(M ; R) ; suivant [20] onle notera parC(M ).
Au vu des inégalités de Novikov, l’homologieH∗(M ;u) est une obstruction à l’existenced’une forme non-singulière dansu. Mais elle n’est pas la seule : lorsqueH∗(M ;u) est nulleon définit la torsion de Whitehead associé àu [18], notéeτ (M ;u). L’annulation de cet élémentdu groupe de WhiteheadWh(π1(M );u) est une autre condition nécessaire. Dans [18] F. Latourajoute une condition de stabilité aux deux conditions ci-dessus et démontre le théorème suivant :
ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE

304 M. DAMIAN
THÉORÈME 2.1. – SiM est une variété compacte connexe sans bord et de dimensionn> 6,une condition nécessaire et suffisante pour que la classeu ∈H1(M ) contienne une forme non-singulière est:
(1)H∗(M ;−u) = 0,
(2) τ (M ;−u) = 0,
(3) u et−u sont stables.
L’idée de la preuve est d’éliminer tous les zéros d’une 1-forme fermée non-dégénérée commedans la démonstration du théorème de s-cobordisme de Stallings [37,21] ; à noter que la troisièmecondition sert uniquement à éliminer les zéros d’indices 2 etn− 2.
Les conditions de Latour pour une classeu rationnelle(i.e. telle que l’image du morphismeu :π1(M ) → R est infinie cyclique) apparaissent aussi dans le travail de Pajitnov [27] etégalement de façon implicite dans les travaux plus anciens de Browder–Levine, Farrell etSiebenmann.
Dans ce paragraphe on va généraliser le théorème de Latour pour une variété de la formeM ×R2k, k > 2 (Théorème 2.6). Comme conséquence on obtiendra :
PROPOSITION 2.2. – SoitM une variété sans bord, compacte et connexe. Les affirmationssuivantes sont équivalentes:
(i) Novst(M ) = 0.(ii) Il existeu ∈H1(M ; R) telle queH∗(M ;−u) = 0 et τ (M ;−u) = 0.
Compte tenu de 2.1 et 2.2, pour démontrer le Théorème 1.1 il faut prouver que sousl’hypothèse (∗) les deux premières conditions de Latour impliquent la troisième. Ensuite, montrerla Proposition 1.2 revient à montrer que la troisième condition n’est pas redondante.
Pour les définitions et les propriétés des notions dont il est question dans les conditions duThéorème 2.1, on renvoie le lecteur à [26,34,28] pour l’homologie de Novikov, à [25,22,18] pourla torsion de Whitehead (associée àu) et à [18] pour la stabilité d’une classeu.
2.2. Une généralisation du théorème de Latour
On commence par quelques définitions. Considérons la forme quadratique non-dégénérée designature (k,k) surR2k :
Q0(x−,x+) =−|x−|2 + |x+|2
(oùx−,x+ ∈Rk).
DÉFINITION. – Soitα une1-forme fermée surM ×R2k. On définit l’applicationi∂vα :M ×R2k→R par
(q,v) 7→(αq,v(∂v1),αq,v(∂v2), . . . ,αq,v(∂v2k )
).
La formeα sera appelée standard à l’infini si l’application
(q,v) 7→ ‖i∂vα− dQ0‖
est bornée.
Remarques. –1. Si la forme quadratique non-dégénérée n’est pas donnée à l’avance dans la définition
précédente, on retrouve la notion classique de 1-forme presque quadratique à l’infini.
4e SÉRIE– TOME 33 – 2000 –N 3

FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉS DE FINITUDE DES GROUPES 305
2. Les zéros d’une telle forme sont tous contenus dans un compact deM ×R2k.3. Étant donnée une 1-forme fermée presque quadratique à l’infiniα surM × Rk
′, il existe
k assez grand etQ une forme quadratique non-dégénérée surR2k−k′ telle queα + dQsoit standard à l’infini. L’addition dedQ ne change pas le nombre de zéros deα. Donc,on peut calculer Novst en utilisant uniquement des 1-formes fermées standard à l’infini surM ×R2k (pourk entier positif). C’est ce qu’on fera dans la suite.
On introduit aussi la notion suivante :
DÉFINITION. – Soitα une1-forme fermée générique surM ×R2k qui est standard à l’infini.On appelle pseudo-gradient pourα un champ de vecteursξ vérifiant les conditions suivantes:
(a) Pour chaque zéroc de α, il existe une carte de Morseh :U (c)→ Rn+2k et une formequadratique non-dégénéréeQ sur Rn+2k telles queh∗(ξ|U(c)) = grad(Q)|h(U(c)).
(b) Pour toutx ∈M ×R2k \Crit(α), on aα(ξx)> 0.On dit que le pseudo-gradient est standard à l’infini s’il vérifie de plus la condition suivante:(c) Le champξ coïncide avec le gradient deQ0 en dehors d’un compact deM ×R2k.
On peut facilement construire un pseudo-gradient standard à l’infini pourα en utilisant unepartition de l’unité.
Pour chaque zéroc deα on fixe un relèvementc dans le revêtement universelM ×R2k. SoitΛ= Z[π1(M )], Λ= Z[[π1(M )]]. Notons parCq leΛ-module libre engendré par les pointsc pourlesquels l’indice de MorseI(c) est égal àq. Pouru= [α], vue comme morphismeπ1(M )→R,on pose par définition :
Cq(α) := Λ−u ⊗Λ Cq,
où l’anneau complétéΛ−u est
Λ−u :=λ=
∑nigi ∈ Λ | u(gi)→−∞
.
La convergence vers−∞ signifie ici que pour toutA < 0, u(gi) < A pour toutgi qui apparaîtdans l’écriture deλ, à l’exception d’un nombre fini.
Les propositions qui suivent sont des généralisations des résultats de [18], Théorème 2.18,Prop. 4.6, Prop. 4.7. Voici leurs énoncés :
PROPOSITION 2.3. – Soit α une 1-forme fermée non-dégénérée et standard à l’infini surM ×R2k. On prend un pseudo-gradient pourα qui est standard à l’infini et générique(dans lesens où les variétés stables intersectent transversalement les variétés instables). Il existe alorsunΛ−u-complexeC•(α,ξ) avec les propriétés suivantes:
(a) Les modules deC•(α,ξ) sontCq(α).(b) L’homologieH∗(C•(α,ξ)) est égale àH∗−k(M ;−u). Lorsque l’homologie est nulle, on a
τ(C•(α,ξ)
)= (−1)kτ (M ;−u).
Les groupes de cohomologieH1(M ; R) etH1(M ×R2k; R) sont canoniquement isomorphes.Si u ∈H1(M ; R), on notera paru l’image deu par cet isomorphisme. On a :
PROPOSITION 2.4. – Supposons quek > 2 etHm(M ;−u) = 0 pour unm ∈ 1, . . . ,n− 1 .Soit β ∈ u non-dégénérée et standard à l’infini n’ayant que des zéros d’indice compris entrem+ k et n+ 2k − 3. Il existe une forme fermée dansu, standard à l’infini, sans zéro d’indiceinférieur ou égal àm+ k et ayant les mêmes zéros d’indicel >m+ k+ 2 queβ.
ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE
306 M. DAMIAN
PROPOSITION 2.5. – On supposek > 2. Soit β ∈ u de Morse et standard à l’infini dontles indices des zéros sont deux entiers consécutifs situés entre3 et n + 2k − 3. Alors, siH∗(M ;−u) = 0 et τ (M ;−u) = 0, la formeβ est cohomologue à une forme standard à l’infiniet non-singulière.
On en obtient comme conséquence la généralisation du Théorème 2.1 qui est l’objectif de ceparagraphe et qui implique 2.2 :
THÉORÈME 2.6. – Soit u ∈ H1(M ; R), fixée. Pourk > 2, les affirmations suivantes sontéquivalentes:
(i) Il existe une forme non-singulière et standard à l’infini dans la classeu ∈ H1(M ×R2k; R).
(ii) H∗(M ;−u) = 0 et τ (M ;−u) = 0.
Démonstration. –(i) ⇒ (ii) Supposons queβ ∈ u vérifie la condition (i). Pour un pseudo-gradient standard
à l’infini quelconqueξ associé àβ, le complexeC•(β,ξ) est nul, donc, en vertu de 2.3,H∗(M ;−u) = 0 etτ (M ;−u) = 0.
(ii) ⇒ (i) Soit α ∈ u définie surM , qu’on suppose générique. On peut prendreα sans zérod’indice 0 etn (on appelle une telle formesans centre[20]). La formeβ := α+dQ0 est standardà l’infini et ses zéros ont leurs indices situés entrek + 1 etn+ k − 1. En utilisant 2.4 pour laformeα+ dQ0 et pourm= 1, on trouve une forme fermée, encore notéeβ, qui n’a pas de zérod’indice inférieur ou égal àk+ 1.
Puis, en procédant par récurrence, on obtient finalement une formeβ ∈ u standard à l’infiniet dont les zéros ont pour indiceq ou q + 1 pour unq ∈ k + 1,. . . ,n + k − 1. Commeτ (M ;−u) = 0, on utilise 2.5 pour éliminer tous les points critiques deβ. 2
Remarque. – Il est intéressant de constater que l’hypothèse (purement algébrique) destabilitédu Théorème 2.1 est compensée dans l’énoncé précédent par la stabilisation pardQ0 surM × R2k. En fait, la stabilité de±u implique l’existence d’une primitive deu sur lerevêtement universelM , dont les niveaux sont simplement connexes ([18, Prop. 5.20]). Celapermet d’éliminer des paires de trajectoires (d’orientations opposées) entre des zéros d’indicesconsécutifs : à l’aide d’un disque de Whitney produit par cette condition, on sépare la variétéstable de la variété instable dans une feuillef−1(c).
La stabilisation pardQ0 a pour effet de rendre les niveaux simplement connexes (comme il n’ya plus de point critique de petit ou de grand indice, tout disque s’appuyant sur un niveauf−1(c)peut être projeté dansf−1(c), en suivant les trajectoires d’un pseudo-gradient). La condition destabilité devient donc inutile.
Les preuves de 2.3–2.5 ne sont pas substantiellement différentes de celles de [18], une foisqu’on a observé que toutes les modifications qu’on fait subir à une 1-forme non-dégénéréestandard à l’infini ont un support compact. Voici quelques détails :
Démonstration de 2.3. –Soit ξ un pseudo-gradient pourα qui est standard à l’infini. Doncξ = grad(Q0) à l’extérieur d’un compact noté parK . Le compactK est supposé de la formeM × ||v−||6R, ||v+||6R.
Soitγ : I→M ×R2k un morceau de trajectoire deξ ; par définition, sa longueur mesurée parβ est donnée par
L(γ) :=∫I
γ∗β.
4e SÉRIE– TOME 33 – 2000 –N 3

FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉS DE FINITUDE DES GROUPES 307
La longueur est strictement positive siγ n’est pas constante. On s’intéresse maintenant auxtrajectoires deξ qui joignent deux zéros deα. Le résultat qui permet de construire le complexeC•(α,ξ) comme dans le cas compact est :
LEMME. – Une orbite deξ joint deux zéros deα si et seulement si elle est de longueur finie.
Démonstration. –Le fait qu’une trajectoire entre deux zéros ait une longueur finie est évident.Réciproquement, si une trajectoire a une longueur finie elle ne peut pas sortir deK : unetrajectoireγt qui passe par un point extérieur deK va à l’infini dansM × R2k pour t→∞ou pour t→−∞ et sa longueur est infinie. La suite de la preuve est identique au cascompact [18]. 2
On a vu que les trajectoires qui joignent deux zéros sont contenues dans le compactK . PourA > 0 on note parL(c,d;A) l’ensemble des trajectoires allant dec à d qui sont de longueurinférieure àA. Si I(d) = I(c) + 1, pourξ générique,L(c,d;A) est formée d’un nombre fini detrajectoires [18].
On fixe une orientation pour chaque variété stableW s(d). Cela induit des co-orientations pourles variétés instables. Les liaisons deL(c,d;A) sont munies dans le casI(d) = I(c) + 1 d’unsigneε=±1 qui est l’orientation de l’intersection transverse deW s(d) avecWu(c).
Définissons la différentielledq :Cq(α)→ Cq−1(α). Soit c,d ∈ Crit(α) et l ∈ L(c,d). Si onrelèvel dansM × R2k à partir ded on obtient un chemin entred et g(l)c, où g(l) ∈ π1(M ).Supposons maintenant queI(d)− I(c) = 1. On définit le « nombre d’incidence » [d, c] ∈ Λ−ucomme suit :
[d, c] :=∑
l∈L(c,d)
ε(l)g(l).
Comme pour toutA > 0 L(c,d;A) ne contient qu’un nombre fini de liaisons, on vérifiefacilement que [d, c] est un élément deΛ−u.
On définit la différentielledq+1(ξ) :Cq+1(β)→ Cq(β) sur les générateurs deCq+1(β) par laformule :
dq+1(d) := (−1)q∑I(c)=q
[d, c]c.
Cette formule s’étend parΛ−u-linéarité àCq+1(β).Pour g ∈ π1(M ) on a [gd, c] = g[d, c] et [d,gc] = g−1[d, c]. Par suite, la différentielle ne
dépend pas du choix des relevésc.Pour terminer la construction il reste à montrer quedq(ξ)dq+1(ξ) = 0. La démonstration est
analogue à celle de [18]. Pour montrer que l’homologie et la torsion deC•(α,ξ) vérifient leségalités de l’énoncé on procède également comme dans le cas compact [18].
Démonstration des Propositions 2.4 et 2.5. –La démonstration est analogue à celle de [18] ;en fait toutes les opérations qu’on applique à la formeβ pour éliminer ses zéros d’indicem+ kont le support compact — le caractère standard à l’infini deβ n’est donc pas affecté. Voici lesmodifications autorisées [18] :
I. Monter (ou descendre) des zéros :– données: c, zéro deβ ; 0<L<L′ des réels.– hypothèse: aucuneξ-trajectoire partant dec n’a une longueur (mesurée parβ) inférieure
àL′.– support de la modification: un voisinage tubulaireV de Wu(c,L′) (la variété instable
formée des trajectoires partant dec jusqu’à la longueurL′).
ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE

308 M. DAMIAN
– modification: (β,ξ)⇒ (β′,ξ) de telle sorte que sif :V → R est la primitive deβ surVvérifiantf (c) = 0, alorsβ′|V admet une primitivef ′ égale àf sur∂V et telle quef ′(c) = L.
II. Ajouter une paire de zéros d’indices consécutifs :– données: une boule ouverteU ⊂M ×R2k, un entierq.– hypothèse: U qui ne contient pas de zéro deβ.– support de la modification: U .– modification: (β,ξ)⇒ (β′,ξ′) ; β′ a deux zéros d’indicesq,q+ 1 situés dansU .
III. Éliminer une paire de zéros d’indices consécutifs :(Lemme de Morse–Smale) :
– données: deux zéros deβ d’indicesq,q+ 1.– hypothèse: il existe uneξ-trajectoire allant dec à d de longueurL et toutes les autres
trajectoires entrec etd ont une longueur strictement supérieure àL.– support: un voisinageV deΩ(c) ∪W s(d,L− ε), oùΩ(c) est un voisinage de Morse dec
de diamètre 2ε.– modification: (β,ξ)⇒ (β′,ξ′) oùβ′|V n’a pas de zéro.
IV. Ajouter des liaisons :– données: des relevésc1, . . . , ck ∈ M ×R2k des zéros d’indiceq et des relevésd1, . . . , dl ∈M × R2k des zéros d’indiceq + 1 ; g0 ∈ π1(M ) ; η = ±1 ; L > 0 ; f :M × R2k→ R uneprimitive deβ.
– hypothèse: β n’a pas de zéros d’indice< q (où q > 2) ; f (d1)> f (d2) + u(g0).– support: Un voisinage tubulaire d’un compactK contenu dans la feuilleF = π(f−1(t0)),
où t0 ∈ ]f (d2) + u(g0), f (d1)[ est fixé au départ.– modification: (β,ξ)⇒ (β,ξ′) où ξ′ vérifie les propriétés suivantes pourA= supi,j(f (dj)−f (ci)) :
[d1, ci]ξ′ = [d1, ci]ξ + ηg0[d2, ci]ξ + (u <A−L),
∀j > 2, [dj , ci]ξ′ = [dj, ci]ξ + (u <A−L).
Ici [ dj , ci] ∈ Λ−u est le « nombre d’incidence » défini à l’aide des trajectoires allant deci à dj[18]. Puis, (u < A − L) désigne un élémentλ =
∑nigi deΛ−u tel queu(gi) < A − L pour
tout i.
V. Éliminer des liaisons :– données: c,d deux zéros deβ d’indices respectifsq et q+ 1 ; L> 0 ; l, l′ desξ-trajectoires
entrec etd de longueur inférieure àL.– hypothèse: β n’a pas de zéro d’indice< q et q > 3 ; les relèvements del et l′ à partir ded ∈ M × R2k aboutissent au même pointgc dans la fibre dec ; les orientations del et l′
(comme intersections des variétés stables et instables) sont opposées.– support : un voisinage d’un disque de Whitney situé dans la feuilleF = π(f−1(t)), oùt ∈ ]f (gc), f (d)[ est fixé au départ.
– modification: (β,ξ)⇒ (β,ξ′) où ξ′ a les mêmes liaisons de longueur< L entre les zérosd’indiceq et q + 1 saufl et l′.
Le support de toutes ces opérations étant compact, l’élimination des zéros est analogue au cascompact [18]. 24e SÉRIE– TOME 33 – 2000 –N 3

FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉS DE FINITUDE DES GROUPES 309
2.3. Conséquences : Propriétés de l’homologie de Novikov
A) OuvertureLa première conséquence des résultats 2.3–2.6 est le fait que l’ensemble des classesu dont
l’homologie de Novikov est nulle est un ouvert dansH1(M ; R) muni de la topologie standard. Cerésultat a été énoncé dans [18] (Prop. 1.17), mais sa preuve (par ailleurs complètement différentede celle-ci) n’est pas correcte (remarque de A. Pajitnov et J.-C. Sikorav).
Pour simplifier, on va noter parX l’ensemble des classesu∈H1(M ; R) telles que l’homologiede Novikov associée à−u est nulle et parY , le sous-ensemble deX formé des classes quivérifientτ (M ;−u) = 0. Par ce qui précède, on a l’inclusion :
C ⊂ Y ⊂X
oùC ⊂H1(M ) représente le cône ouvert formé des classes qui peuvent être représentées par desformes non-singulières.
On va montrer :
PROPOSITION 2.7. – Les ensemblesX et Y sont également des(cônes) ouverts dansH1(M ,R), muni de sa topologie standard.
Démonstration. –L’ouverture deY est une conséquence directe du Théorème 2.6. On au ∈ Y si et seulement s’il existe une forme non-singulière et standard à l’infini dans la classeu∈H1(M ×R2k; R). Or cette dernière condition est évidemment ouverte enu.
La propriété analogue pour l’ensembleX repose sur le résultat suivant :
LEMMA A. – Les affirmations suivantes sont équivalentes:(i) u ∈ X .(ii) Pour toutm ∈ 0, 1, . . . ,n+ 2k il existe une forme de Morse standard à l’infini dans la
classeu ∈H1(M ×R2k; R) qui n’a aucun zéro d’indicem.
Montrons que la condition (ii) est ouverte. Si (ii)m est cette condition formulée pour unmfixé, soitu vérifiant (ii)m. Notons parβm ∈ u une forme produite par cette condition. PrenonsU une réunion finie de petites boules disjointes deM telle que la totalité des zéros deβm soitcontenue dansU ×R2k.
Si β′ est une 1-forme fermée surM qui est nulle surU et suffisamment proche de 0, il estclair queβm + β′ a les mêmes zéros queβm, donc pas de zéro d’indicem.
Par ailleurs, la flècheH1(M ,U ; R)→ H1(M ; R) est surjective, donc siu′ ∈ H1(M ; R) estsuffisamment proche de 0, alorsu+ u′ vérifie (ii)m.
Par conséquent, les conditions (ii)m sont ouvertes, donc leur intersection (ii), l’est aussi. Ilreste donc à prouver le Lemme A.
Démonstration du Lemme A. –(ii) ⇒ (i) Fixons m entre k et n + k. Si βm ∈ u vérifiela condition (ii)m, alors pour tout pseudo-gradient associéξm on aCm(βm,ξm) = 0, doncHm(C•(βm,ξm)) = 0. Par la Proposition 2.3, on obtient queHm−k(M ;−u) = 0. Commema été arbitrairement choisi, on aH∗(M ;−u) = 0. Il suit queu ∈ X .
(i) ⇒ (ii) Pourm6 k oum> n+ k toute forme du typeα+ dQ0, avecα ∈ u sans centre etnon-dégénérée, vérifie (ii). On suppose doncm compris entrek+ 1 etn+ k− 1.
Fixonsm. On part avec une forme du typeα+dQ0, comme ci-dessus. Une application répétéede 2.4 donne alors une formeβ ∈ u dont les zéros ont pour indicen + k ou n + k + 1. Parconséquent,β vérifie la condition (ii)m. 2
La Proposition 2.7 est donc complètement démontrée.2ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE

310 M. DAMIAN
B) DualitéSoitw : Wh(π1(M );−u)→Wh(π1(M );u) le morphisme de groupes induit parg 7→ w1(g)g−1
avecw1(g) =±1 selon le cas où l’action deg préserve ou change l’orientation deM . Siα est uneforme générique dans la classeu etξ un pseudo-gradient associé, on considère lesΛu-complexesCn−•(−α,−ξ) et HomΛ−u (C•(α,ξ),Λ−u) (la structure du deuxième étant définie à l’aide dew).Dans [18] (Prop. 2.30) on montre que ces complexes sont simplement isomorphes. On en obtientun résultat de dualité sur l’homologie de Novikov, via le théorème des coefficients universels. Enparticulier, on a :
PROPOSITION 2.8. – SoitM une variété compacte et connexe de dimensionn et u une 1-classe de cohomologie. SiH∗(M ;−u) = 0 pour ∗ 6 l, alorsH∗(M ;u) = 0 pour ∗ > n− l. Sil= n, on a aussi la relation
τ (M ;u) = (−1)n−1w(τ (M ;−u)
)entre les torsions de Whitehead associées àu et−u.
On peut facilement montrer cette proposition en appliquant la Proposition 2.4 : en effet, siH∗(M ;u) = 0 pour∗ 6 l, on utilise ce théorème pour trouver une 1-forme génériqueβ dans laclasseu, qui est standard à l’infini et dont tous les zéros ont leurs indices strictement supérieurs àk+ l. Donc, la forme−β n’aura pas de zéro d’indice supérieur ou égal àn+ k− l et on concluten utilisant la Proposition 2.3.
Quant à la relation entre les torsions, on l’obtient en trouvant une 1-formeβ dans la classeu quiest standard à l’infini et dont tous les zéros ont deux indices consécutifs,q,q+1. Il suffit après deremarquer que les matrices des différentiellesdq+1(β,ξ) :Cq+1→ Cq etdq+1(β,ξ) :Cq+1→ Cqse correspondent parw.
On l’utilisera cette proposition dans le §3.
3. Sur la condition de stabilité
Ce paragraphe est consacré à la construction d’un exemple qui prouve la Proposition 1.2.Compte tenu de 2.2, cela revient à montrer que la condition de stabilité dans le Théorème 2.1n’est pas impliquée par les deux premières. Autrement dit, avec les notations antérieures, il fautprouver qu’en généralC 6= Y .
La stabilité est une condition purement algébrique : elle dépend uniquement deπ1(M ) et deu(voir [18], Lemme 5.7). Pour une classeu rationnelle on a le critère suivant [18] :
PROPOSITION 3.1. – Si le sous-groupeKer(u)⊂G est de présentation finie alors les classes±u sont stables. La réciproque est vraie siu est rationnelle.
Lorsqu’un groupe est de présentation finie on dit aussi qu’il a la propriété de finitudeF2.Par ailleurs, on montrera ci-après (Prop. 4.2) que siu ∈ X alors Ker(u) a la propriété de finitudeFP2. On est donc amené à étudier des classes dont le noyau a (ou n’a pas) certaines propriétés definitude. On va s’appuyer sur les résultats de Bestvina et Brady [2] qui fournissent des exemplesde telles classes.
Commençons par rappeler les définitions et quelques résultats concernant les différentespropriétés de finitude des groupes.
3.1. Propriétés de finitude des groupes
Ce sont des généralisations naturelles pour les notions de « type fini » et « présentation finie ».Voici les définitions :
4e SÉRIE– TOME 33 – 2000 –N 3

FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉS DE FINITUDE DES GROUPES 311
DÉFINITION. – On dit que le groupeG est de typeFn si une des deux conditions équivalentessuivantes est satisfaite:
(i) Il existe un complexeK(G, 1) dont len-squelette est fini.(ii) Il existe une action libre, propre, cellulaire, discontinue, fidèle et cocompacte deG sur un
complexe(n− 1)-connexe.
DÉFINITION. – On dit que le groupeG est de typeFHn s’il existe une action libre, propre,cellulaire, discontinue, fidèle et cocompacte deG sur un complexeK dont l’homologie réduitevérifie: Hi(K; Z) = 0 pour i6 n− 1.
DÉFINITION. – On dit que le groupeG est de typeFPn s’il existe une résolution deZ
Pn→ Pn−1→ · · ·→ P0→ Z
formée deZ[G]-modules projectifs de type fini.
Les types de finitude ci-dessus ont été introduites par Wall [40] et Bieri [3]. On voit facilementqu’être de typeF1 équivaut à être de type fini pour un groupeG ; puisG est de typeF2 si etseulement s’il est de présentation finie. Voici d’autres propriétés :
1. G ∈Fn⇒G ∈ FHn⇒G ∈FPn.2. G ∈F1⇔G ∈ FP1⇔ G de type fini.3. Pourn> 2,G ∈ Fn⇔G ∈F2 ∩FPn [9].Une question naturelle est de savoir s’il existe des groupes qui ont un certain type de finitude,
mais n’en ont pas un autre. Par exemple, siF2 est le groupe libre à 2 générateurs, le morphismeu :F2 × F2 → Z qui envoie tous les générateurs en 1 a son noyau de type fini mais pas deprésentation finie [36]. Plus généralement, Stallings (pourn = 3) et Bieri ont montré que lemorphisme analogueu :Fn2 → Z a le noyau de typeFn−1 mais pas de typeFPn [36,4].
L’implication FP2 ⇒ F2 (qui entraîneraitFPn ⇒ Fn) a été conjecturée, mais elle a étéinfirmée par le résultat récent de Bestvina et Brady [2]. Ce résultat généralise les exemplesde Stallings et Bieri et fournit du même coup une large panoplie d’exemples de morphismesu :G→ Z dont le noyau a un type de finitude et n’en a pas un autre. Le travail de Bestvinaet Brady a lui-même été généralisé par Meier, Meinert et van Wyk [23] pour des morphismesu :G→R. On va présenter un bref résumé de ces résultats.
3.2. Le résultat de Bestvina et Brady
Tous les exemples de [2] sont des noyaux de morphismesu :G→ Z ; les groupesG sont desgroupes associés à des graphes qui ont la propriété d’être le 1-squelette d’un complexe drapeaufini. Voici la définition exacte :
DÉFINITION. – Un complexe simplicialL est un complexe drapeau si tout ensemble desommets deL mutuellement adjacents engendre un simplexe deL.
Remarques. –1. Un complexe drapeau est complètement déterminé par son 1-squelette.2. La première subdivision barycentrique de n’importe quel complexe simplicial est un
complexe drapeau.
Soit g1,g2, . . . ,gm les sommets d’un complexe drapeauL, supposé fini. On associe àL (plusprécisément à son 1-squeletteSk1(L)) un groupeGL de la manière suivante :
DÉFINITION. – On appelle groupe d’Artin à angles droits associé àL le groupe:
GL = 〈g1,g2, . . . ,gm〉/[gi,gj] = 1 ∀gi,gj adjacents dans Sk1(L).
ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE

312 M. DAMIAN
Le résultat principal de [23] qui généralise celui de [2] s’énonce comme suit :
THÉORÈME 3.2. – Soit L un complexe drapeau fini,GL le groupe d’Artin associé etu :GL → Z un morphisme. On suppose queu(gi) 6= 0 pour tout générateurgi dans laprésentation ci-dessus. Alors, pour toutn ∈N∪ ∞ , le noyau deu vérifie:
(i) Ker(u) de typeFPm si et seulement siL est(m− 1)-acyclique.(ii) Ker(u) de typeFm si et seulement siL est(m− 1)-connexe.
On va utiliser ce théorème pour donner un exemple de classeu ∈ Y qui n’est pas stable surune variétéM .
3.3. Construction d’un exemple deu ∈Y \ COn va chercher notre exemple parmi celles de Bestvina et Brady. Mais il faut encore trouver
un lien entre des propriétés de finitude de Ker(u) et l’homologie de Novikov. On l’établit par lerésultat suivant :
PROPOSITION 3.3. – SoitMn une variété(ou un CW-complexe) compacte et connexe tellequeM soitm-connexe pour unm > 1 fixé. Alors, siu :π1(M )→ R est un morphisme dont lenoyau est de typeFPm+1, on aH∗(M ;±u) = 0 pour∗6m.
Démonstration. –L’image deu est isomorphe àZs ⊂ R. Si M estm-connexe, l’homologiede Novikov associée àu vérifie [34] :
H∗(M ;u) = TorΛ∗ (Λu,Z) ∀∗6m.
Autrement dit, pour∗ 6m, l’homologie de Novikov coïncide avec l’homologie du groupefondamental deM à coefficients dans leΛ-moduleΛu. Pour relier celle-ci au noyau deu onutilise la suite spectrale de Hochschild et Serre [15] :
PROPOSITION 3.4 (voir [9, p. 171]). – Si 1→ K → G → Q → 1 est une suite exactede groupes etR est unG-module, alors il existe une suite spectraleErpq convergeant versHp+q(G;R) telle que:
E2pq =Hp
(Q;Hq(K;R)
).
Ici Q agit surHq(K;R) par conjugaison.
Dans notre contexteG= π1(M ), Q= Zs, K = Ker(u) etR= Λu ; on obtient donc une suitequi converge vers l’homologie de Novikov pourp+ q 6m. CommeQ= Zs, le groupeE2
pq estnul pourp 6= 0, 1,. . . ,s. Par ailleurs, on a :
LEMME 3.5. – Si Ker(u) est de typeFPm+1, alorsE2pq = 0 pourq 6= 0, q 6m.
Admettons pour l’instant ce lemme. Voici alors la fin de la preuve de 3.3. Siu est rationnelle(i.e. Im(u)≈ Z), c’est plus simple : On vient de montrer que tous les groupesE2
pq avecp+q6msont nuls à l’exception deE2
00 et E210. Par conséquent la même remarque est valable pour les
groupesE∞pq . Cela impliqueH∗(M ;u) = 0 pour 26 ∗6m. MaisH1(M ;u) est également nulpuisque Ker(u) est de typeFP1, donc de type fini ([18, Prop. 5.8]).
Dans le cas général montrons queE2p0 = 0 pour toutp. On a tout d’abord
H0(Ker(u);Λu
)= Z ⊗Z[Ker(u)] Λu ≈ Z[[ t1, t2, . . . , ts]][ t
−11 , . . . t−1
s ].
On voit que l’action deZ[Zs] ≈ Z[t1, t2, . . . , ts] sur l’anneau des séries de Laurent àsvariables ci-dessus est donnée par la multiplication canonique. Pours = 1, comme 1− t est
4e SÉRIE– TOME 33 – 2000 –N 3

FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉS DE FINITUDE DES GROUPES 313
inversible dans l’anneau des séries de Laurent, on aH∗(Z; Z[[ t]][ t−1]) = 0 (pour la résolution
canonique 0→ Z[[ t]][ t−1]∗(1−t)→ Z[[ t]][ t−1]→ Z).
Puis, on procède par récurrence ; on aZ[t1, t2, . . . , ts] ≈ Z[t1, t2, . . . , ts−1]⊗Z Z[ts] (de mêmepour des séries de Laurent) et on utilise la formule de Künneth.
Par conséquent,E2pq = 0 pourp+ q 6m, doncH∗(M ;u) = 0 pour∗6m.
Comme Ker(u) = Ker(−u), on obtient de manière analogue la nullité deH∗(M ;−u) pour∗6m. 2
Voici maintenant la démonstration du Lemme 3.5.Le résultat suivant a été démontré par Bieri et Eckmann [5] :
THÉORÈME 3.6. – SoitK un groupe etm un nombre entier positif. Les affirmations suivantessont équivalentes:
(i) Le groupeK est de typeFPm+1.(ii) Le foncteurTorZ[K]
∗ (Z, ·) commute avec les produits directs pour tout∗6m.
PourK = Ker(u) cela implique immédiatement le Lemme 3.5. En effet, considérons pourl ∈ Im(u) lesZ[Ker(u)]-modules suivants
Λ(l) =
∑i
nigi ∈ Λ | u(gi) = l ∀i.
Il est évident que les modulesΛ(l) sont libres surZ[Ker(u)]. En effet, sit ∈ π1(M ) est tel queu(t) = l, on voit que t est une base pour leZ[Ker(u)]-moduleΛ(l).
On définit maintenant pourk ∈N lesZ[Ker(u)]-modules
Λk =∏l>−k
Λ(l).
Le Théorème 3.6 implique que TorZ[K]∗ (Z,Λk) = 0 pour tout 16 ∗ 6m et pour toutk. Pour
finir, il suffit de remarquer queΛu est la limite directe desΛk via les inclusions canoniques.Comme le foncteur Tor commute avec les limites directes, on obtientH∗(Ker(u);Λu) = 0 pour16 ∗6m. La démonstration du Lemme 3.5 est terminée.
On utilise la Proposition 3.3 et le Théorème 3.2 pour donner l’exemple souhaité :
PROPOSITION 3.7. – Il existe une variété différentielle compacte et connexeM et un systèmefini de générateurs g1, . . . ,gm de son groupe fondamental tels que:
(i) Aucune classeu ∈H1(M ; R) ne satisfait la condition±u stables. En particulierM nefibre pas sur le cercle(cf. Théorème2.1)
(ii) Pour toute classe rationnelleu ∈ H1(M ; R), non nulle sur les générateursgi, on aH∗(M ;u) = 0.
(iii) Pour toute classeu ∈H1(M ; R) le groupe de Whitehead Wh(π1(M );u) est nul.
Démonstration. –On prend d’abord un complexe fini acyclique non simplement connexeL (par exemple une sphère d’homologie privée d’un disque). Quitte à prendre sa premièresubdivision barycentrique, on peut supposer queL est un complexe drapeau fini. SoitGL legroupe d’Artin associé etu :GL→ Z un morphisme qui est non nul sur les générateurs deGL(pour la présentation canonique). Grâce au Théorème 3.2, Ker(u) est de typeFP∞, mais pas detypeF2.
Le groupeGL admet un espace d’Eilenberg–Mac LaneQ ∼K(GL, 1) qui est un complexecompact (voir [24,11], ou [2] pour la construction).
ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE
314 M. DAMIAN
Pour obtenir une variété à partir du complexeQ on utilise un procédé classique. Siq est ladimension deQ, on plongeQ dansR2q+3 et on épaissit son image dansR2q+3 ; on obtient ainsiune variété à bordW qui a le même type d’homotopie queQ. Notons parM le bord∂W —c’est une variété compacte et connexe de dimension 2q+ 2.
Par position générale, un objet de dimensionq + 2 n’intersecte pas l’âmeQ ⊂ W . Enparticulier, on a une application bien définie et surjective
πi(Q)≈ πi(W )→ πi(M )
pour touti6 q+ 1. Il suit queM est (q+ 1)-connexe.La variétéM et le système canonique de générateurs pour le groupe d’ArtinGL = π1(M )
satisfont aux conditions de l’énoncé. Vérifions d’abord la condition (i).Soit u non nulle sur les générateursgi. En vertu du critère 3.1, la condition (i) est satisfaite
si u est rationnelle, car Ker(u) n’est pas de présentation finie. Mais la stabilité est une conditionouverte enu [18], donc a est vérifiée pour toute classeu. En particulier, la variétéM ne fibre passur le cercle.
(ii) Soit u rationnelle, non nulle sur les générateursgi. Appliquons la Proposition 3.3. Onobtient queH∗(M ;±u) = 0 pour tout∗ 6 q + 1. En appliquant la dualité 2.8, il suit queH∗(M ;±u) = 0 pour tout∗, doncu ∈ X .
(iii) L’espace d’Eilenberg–Mac LaneQ pourGL peut être choisi à courbure négative [2] dansle sens de Gromov [17]. Par ailleurs, siX est un complexe à courbure négative, son groupefondamental vérifieWh(π1(K)) = 0. Ce résultat a été prouvé par Farrell–Jones pour des variétés[14]. La généralisation dans le cas des complexes est due à Hu [16]. Par conséquent, on a
Wh(π1(M )
)≈Wh
(π1(Q)
)= 0.
Il suit facilement queWh(π1(M );u) = 0 pour toute 1-classeu surM . 2Cet exemple constitue une preuve pour la Proposition 1.2. En effet on trouve des classesu ∈ Y
(car la torsion de Whitehead associée à une classeu, d’homologieH∗(M ;u) = 0, appartient augroupeWh(π1(M );u) qui est nul). Donc Novst(M ) = 0 en vertu de la Proposition 2.2. Par ailleursNov(M ) 6= 0 par 2.1.
Puis, on peut fabriquer de telles variétésMn pour toutn> 8 : en effet, d’après [2], il existeun complexe d’Eilenberg–Mac LaneK(GL, 1) de dimensionq = dim(L) + 1. On peut partir dedim(L) = 2 et obtenir une variété de dimension 8.
4. La démonstration du Théorème 1.1
Tout d’abord, on rappelle la définition et quelques propriétés des invariants géométriques quiinterviennent dans la condition (∗).
4.1. Les invariantsΣi(G) etΣi(G; Z)
Ces invariants ont été introduits par Bieri, Neumann, Strebel et Renz en [6–8,29]. PourG ayantun type de finitude donné, ils donnent des informations sur les types de finitude des sous-groupesN ⊂G pour lesquels le quotientG/N est abélien libre. Pour simplifier, on va appeler BNS lesinvariantsΣi(G) et BR les invariantsΣi(G; Z). Voici leurs définitions.
Notons par [G,G] le sous-groupe des commutateurs du groupeG. Si G est de type fini, lequotientG/[G,G] est isomorphe àZm ⊕ torsion pour unm entier positif, appelé rang deG.
4e SÉRIE– TOME 33 – 2000 –N 3

FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉS DE FINITUDE DES GROUPES 315
Considérons l’ensemble Hom(G; R) des morphismesu :G→R. Les invariants BNS et BR sontdes sous-ensembles de la sphère unité
Sm−1≈ S(G) =(Hom(G; R) \ 0
)/R∗+
définie via l’action canonique (r,u) 7→ ru deR+ sur les morphismes. On note par [u] la classedu morphismeu.
Considérons un groupeG de typeFq. Il admet donc un espaceQ≈K(G, 1) dont leq-squeletteest fini. Étant donné un morphismeu :G→ R, on choisit une primitivef : Q→ R pouru (i.e.une fonction qui vérifief (gx) = u(g) + f (x) pour tout (g,x)∈G× Q). On peut construiref enchoisissant un arbre maximalT dans le 1-squelette deQ, en le relevant enT ⊂ Q et en imposantf |T
= 0, f |gT
= u(g), puis en prolongeantf à Q de telle sorte qu’elle soit affine sur chaquesimplexe. Notons parQu,r l’ensemble
x ∈ Q | f (x)>−r
, r ∈R.
DÉFINITION. – La classe[u] appartient àΣq(G) (resp.Σq(G; Z)) s’il existe un nombre réel
r tel que l’inclusionQu,0i→Qu,r vérifieπk(i) = 0 (resp.Hk(i) = 0) pour toutk < q. On a noté
par πk (resp.Hk) le k-ième foncteur d’homotopie(resp. d’homologie réduite).
Remarque. – Dans la définition précédente on aurait pu prendre à la place deQ un espace(q − 1)-connexe sur lequelG agit de manière libre, cellulaire, propre, discontinue, fidèle etcocompacte.
Propriétés1. (voir [6]) [u] ∈Σ1(G)⇔H1(M ;u) = 0.2. (voir [7])Σ1(G) =Σ1(G; Z).3. [6, Théorème A], [7, Théorème A] Les ensemblesΣq(G; ) etΣq(G; Z) sont des ouverts
deS(G).4. Σi(G) =Σi(G; Z)∩Σ2(G) (par Hurewicz).La propriété essentielle de ces invariants est la suivante :SoitN un sous-groupe deG tel queG/N soit un groupe abélien. On définit
S(G,N ) =
[u] ∈ S(G) | u|N = 0.
C’est une grande sous-sphère deS(G) de dimensionrg(G/N )− 1. On a :
THÉORÈME 4.1 ([6, Théorème B1] et [7, Théorème B]). –Le sous-groupeN est de typeFq(resp.FPq) si et seulement siΣq(G) (resp.Σq(G; Z)) contient la sphèreS(G,N ). En particulier,si Ker(u) est de typeFq (resp.FPq) alors±u ∈Σq(G) (resp.Σq(G; Z)).
On voit facilement que pour une classeu rationnelleS(G, Ker(u)) = ±u. On a alors :
COROLLAIRE (voir aussi Prop. 3.1). –Siu est rationnelle, alorsKer(u) est de typeFq (resp.FPq) si et seulement si±u∈Σq(G) (resp.Σq(G; Z)).
Groupes(de présentation finie) qui vérifient la condition(∗).La condition (∗) n’est pas vérifiée pour tous les groupes. En effet, l’exemple construit dans
la Proposition 3.7 contredirait le Théorème 1.1. Voici quelques classes de groupes pour lesquelscette condition est satisfaite :
1. Groupes dont le sous-groupe des commutateurs est de présentation finie (en particulier lesgroupes abéliens). Dans ce casΣ2(G) = S(G).
ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE
316 M. DAMIAN
2. Groupes pour lesquels la restriction Hom(G,R)→ Hom(Z(G),R) est non nulle. Sig0 ∈Z(G) est non-trivial et le morphismeu vérifie u(g0) 6= 0, alors [u] ∈ Σk(G) pour tout
k > 1 [24,7]. En particulierΣ2(G) = S(G).
3. Groupes fondamentaux des variétés compactes de dimension 3. SiG = π1(M3), on aΣ1(G) = C(M )/R+ (=−Σ1(G)) [6,38]. En particulier,Σ1(G) =Σ2(G) et la relation (∗)suit trivialement.
4. Groupes de présentation finie à une seule relation. Pour ces groupes on aΣq(G) =Σ1(G)etΣ1(G; Z) =Σq(G; Z) [8]. Cela entraîne en particulier l’égalitéΣ2(G) =Σ2(G; Z).En fait, si le nombre de générateurs d’une présentation finie à une relation est supérieur à3, on aΣi(G; Z) = ∅ (voir 5. ci-après) ; pour une présentation à deux générateurs et unerelation, l’invariantΣ1(G) a été explicitement calculé par Brown [10].
5. Groupes qui admettent une présentation à défaut supérieur à 2 (par définition, le défautd’une présentation est le nombre de générateurs — le nombre de relations). Dans ce cas,on aΣ1(G) = ∅ [6,34,20].
6. Groupes associés à des graphes cordaux (par définition, un graphe cordal n’admet pas dessous-graphes pleins engendrés par plus de 3 sommets qui sont des circuits) — voir [12,24]. Plus généralement, tout groupe associé à un graphe dont le complexe drapeau estsimplement connexe vérifie (∗) (en vertu de 3.2).
7. Groupes vérifiantΣ2(G; Z) = ∅. Un exemple estG= F2×F2 [7]. Plus généralement, toutgroupe associé à un graphe dont le complexe drapeau n’est pas 1-cyclique vérifie cettecondition (en particulier c’est le cas des graphes qui n’ont aucun 3-circuit).
Le Théorème 1.1 est une conséquence immédiate du résultat qui suit.
4.2. Un résultat de J.-C. Sikorav
La nullité de l’homologie de Novikov impose une certaine propriété de finitude pour le noyaude la classeu, comme le montre la proposition suivante. Elle a été prouvée par J.-C. Sikorav dansle casπ2(M ) = 0 (communication privée), mais on n’a pas besoin de cette condition.
PROPOSITION 4.2. – On considère une variétéM compacte et connexe. Soitu une1-classede cohomologie rationnelle surM vérifiantHi(M ;±u) = 0 pour i = 1, 2. Alors Ker(u) est detypeFP2.
Démonstration. –Tout d’abord, quitte à remplacerM parM × S4, on peut supposer que sadimension est supérieure à 5. Ensuite, commeH1(M ;±u) = 0, on peut éliminer comme dans[18] les points critiques d’indice 1 etn− 1 d’une forme non-dégénéréeα deu (supposée sanscentre). En particulier, on peut trouver une primitivef deα dont toutes les feuillesf−1(c) sontconnexes.
Puis, on utilise la suite suivante [34] qui est exacte pour toutk :
0→ lim←−
1Hk+1(M , f 6 c)→Hk(M ;u)→ lim←−
Hk(M , f 6 c)→ 0
où, par définition, lim←−
1An = ΠAn/π(α)− α (ici π :ΠAn→ΠAn est l’application donnée
par les projectionsπn du système projectif (An)n).En particulier, la nullité du deuxième groupe d’homologie de Novikov entraîne lim
←−H2(M ,
f 6 c) = 0. Mais, du fait quef n’a pas de point critique d’indice 0, 1,n− 1,n, il suit que pourc < c′ les morphismes canoniques
H1(f 6 c)→H1(f 6 c′)
4e SÉRIE– TOME 33 – 2000 –N 3
FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉS DE FINITUDE DES GROUPES 317
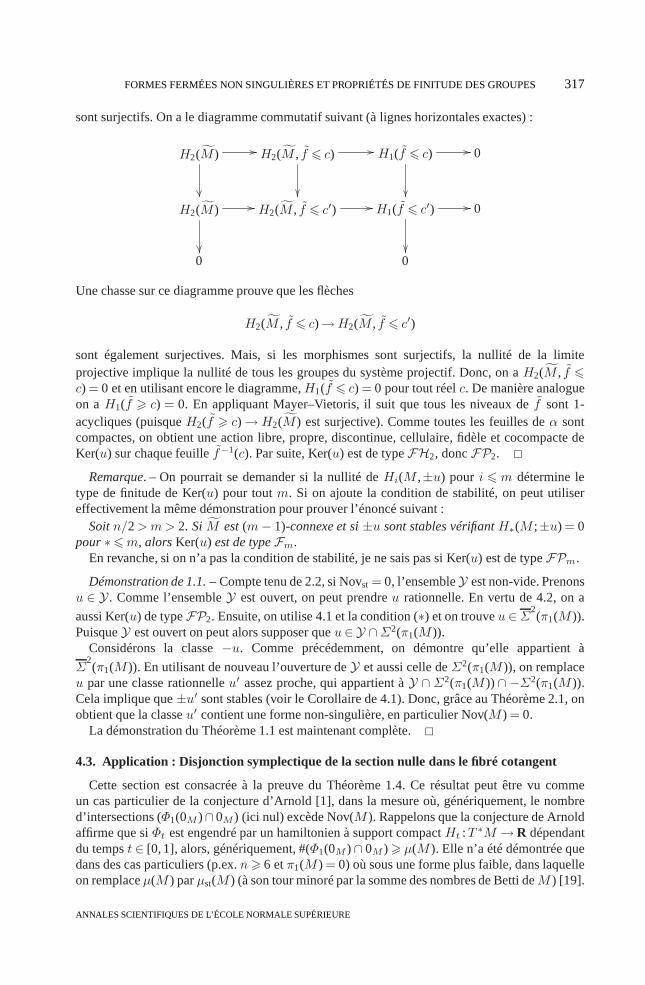
sont surjectifs. On a le diagramme commutatif suivant (à lignes horizontales exactes) :
H2(M ) H2(M , f 6 c) H1(f 6 c) 0
H2(M ) H2(M , f 6 c′) H1(f 6 c′) 0
0 0
Une chasse sur ce diagramme prouve que les flèches
H2(M , f 6 c)→H2(M , f 6 c′)
sont également surjectives. Mais, si les morphismes sont surjectifs, la nullité de la limiteprojective implique la nullité de tous les groupes du système projectif. Donc, on aH2(M , f 6c) = 0 et en utilisant encore le diagramme,H1(f 6 c) = 0 pour tout réelc. De manière analogueon aH1(f > c) = 0. En appliquant Mayer–Vietoris, il suit que tous les niveaux def sont 1-acycliques (puisqueH2(f > c)→ H2(M ) est surjective). Comme toutes les feuilles deα sontcompactes, on obtient une action libre, propre, discontinue, cellulaire, fidèle et cocompacte deKer(u) sur chaque feuillef−1(c). Par suite, Ker(u) est de typeFH2, doncFP2. 2
Remarque. – On pourrait se demander si la nullité deHi(M ,±u) pour i 6m détermine letype de finitude de Ker(u) pour toutm. Si on ajoute la condition de stabilité, on peut utilisereffectivement la même démonstration pour prouver l’énoncé suivant :
Soitn/2>m> 2. SiM est(m− 1)-connexe et si±u sont stables vérifiantH∗(M ;±u) = 0pour∗6m, alorsKer(u) est de typeFm.
En revanche, si on n’a pas la condition de stabilité, je ne sais pas si Ker(u) est de typeFPm.
Démonstration de 1.1. –Compte tenu de 2.2, si Novst = 0, l’ensembleY est non-vide. Prenonsu ∈ Y . Comme l’ensembleY est ouvert, on peut prendreu rationnelle. En vertu de 4.2, on a
aussi Ker(u) de typeFP2. Ensuite, on utilise 4.1 et la condition (∗) et on trouveu ∈Σ2(π1(M )).
PuisqueY est ouvert on peut alors supposer queu∈ Y ∩Σ2(π1(M )).Considérons la classe−u. Comme précédemment, on démontre qu’elle appartient à
Σ2(π1(M )). En utilisant de nouveau l’ouverture deY et aussi celle deΣ2(π1(M )), on remplace
u par une classe rationnelleu′ assez proche, qui appartient àY ∩ Σ2(π1(M )) ∩ −Σ2(π1(M )).Cela implique que±u′ sont stables (voir le Corollaire de 4.1). Donc, grâce au Théorème 2.1, onobtient que la classeu′ contient une forme non-singulière, en particulier Nov(M ) = 0.
La démonstration du Théorème 1.1 est maintenant complète.24.3. Application : Disjonction symplectique de la section nulle dans le fibré cotangent
Cette section est consacrée à la preuve du Théorème 1.4. Ce résultat peut être vu commeun cas particulier de la conjecture d’Arnold [1], dans la mesure où, génériquement, le nombred’intersections (Φ1(0M )∩0M ) (ici nul) excède Nov(M ). Rappelons que la conjecture de Arnoldaffirme que siΦt est engendré par un hamiltonien à support compactHt :T ∗M →R dépendantdu tempst ∈ [0, 1], alors, génériquement, #(Φ1(0M )∩ 0M )> µ(M ). Elle n’a été démontrée quedans des cas particuliers (p.ex.n> 6 etπ1(M ) = 0) où sous une forme plus faible, dans laquelleon remplaceµ(M ) parµst(M ) (à son tour minoré par la somme des nombres de Betti deM ) [19].
ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE

318 M. DAMIAN
On peut formuler une version non-hamiltonienne, où on ne demande pas que l’isotopiesymplectique soit engendrée par un hamiltonien ; dans ce cas on a Nov(M ) comme minorant.
Dans le casπ1(M ) = Z et dim(M ) > 6, la démonstration du Théorème 1.4 a été donnéepar J.-C. Sikorav dans [32]. Elle a été généralisé par A. Pajitnov pourπ1(M ) = Z × G, sousl’hypothèse que la classe de Liouville deΦ1(0M ) est la projection surZ [27]. Comme dans ladémonstration qui suit, la théorie des fonctions génératrices y est l’outil principal. En voici unebrève présentation.
Fonctions et formes génératricesPour une présentation plus complète des notions développées ici, on renvoie le lecteur à
[33]. On commence par rappeler la définition des fonctions et des formes génératrices presquequadratiques à l’infini. On utilise la notation « fgqi » pour les deux notions et on déduit ducontexte s’il s’agit d’une forme ou d’une fonction.
DÉFINITION. – Soitα une1-forme fermée presque quadratique à l’infini surM × Rk. Ondit que α est une « fgqi » si l’origine0 ∈ Rk est une valeur régulière pour l’applicationi∂vα :M ×Rk→Rk.
Si α = dS est exacte, on dit queS est une fonction génératrice presque quadratique àl’infini. Si de plusS est quadratique à l’extérieur d’un compact,S s’appelle fonction génératricequadratique à l’infini.
Supposons queα est comme dans la définition ci-dessus. On considère alors la sous-variétédeM ×R définie comme suit :
Σα :=
(q,v)∈M ×R | i∂vα(q,v) = 0.
Puis, on définit une immersioniα :Σα→ T ∗M par la formule :
(q,v) 7→ (q,αq,v)
oùαq,v est vue comme application linéaire deTqM dansR.On voit facilement queiα est une immersion lagrangienne. De plus, siα est exacte, alors
l’immersion lagrangienneiα est également exacte. Les intersections deL avec la section nulles’identifient via l’applicationiα avec les zéros de la formeα. Par cette identification, lesintersections transverses deL avec 0M correspondent aux zéros non-dégénérés deα.
DÉFINITION. – On dit que la variété lagrangienneL := iα(Σα) est engendrée par la formegénératriceα.
On utilise le théorème suivant de [33] :
THÉORÈME 4.3. – Toute variété symplectiquement isotope à0M admet une fgqi définie surM ×R2k et standard à l’infini.
Le résultat est démontré dans [33] dans le cas exact. La généralisation non-hamiltonienne enest une conséquence immédiate [32]. On passe maintenant à la :
Démonstration de 1.4. –(ii) ⇒ (i) Si Nov(M ) = 0, pourα forme fermée non-singulière dedegré 1, l’isotopie de plongements lagrangiensΦt :M → T ∗M , définie parq 7→ tαq disjoint lasection nulle d’elle-même.
(i)⇒ (ii) Si l’auto-disjonction est réalisée par une isotopieΦt, la variété lagrangienneΦ1(0M )admet d’après le Théorème 4.3 une fgqi non-singulière. Donc Novst(M ) = 0 et, en vertu duThéorème 1.1, Nov(M ) = 0. Cela implique queM fibre sur le cercle. 24e SÉRIE– TOME 33 – 2000 –N 3
FORMES FERMÉES NON SINGULIÈRES ET PROPRIÉTÉS DE FINITUDE DES GROUPES 319
Remarque. – La question suivante est ouverte :
Question. – Existe-t-il une variété compacte et connexeM ne fibrant pas sur le cercle pourlaquelle la section nulle deT ∗M peut être disjointe d’elle-même par une isotopie symplectique ?
Il s’agit donc de supprimer la condition (∗) de l’énoncé 1.4. Les contre-exemples potentielssont à chercher parmi les variétés ayant la propriété de la Proposition 3.7 (existence d’une classeu∈ Y telle que Ker(u) /∈F2).
Remerciements
Je remercie François Laudenbach pour m’avoir fait découvrir l’article de F. Latour et Jean-Claude Sikorav pour les nombreuses discussions que nous avons eues sur ces questions.
RÉFÉRENCES
[1] A RNOL’ D V.I., First steps in symplectic topology,Russ. Math. Surv.6 (1986) 3–18.[2] BESTVINA M., BRADY N., Morse theory and finiteness properties of groups,Invent. Math.129(1997)
445–470.[3] BIERI R., Homological Dimension of Discrete Groups,Queen Mary College Mathematics Notes,
1976.[4] BIERI R., Normal subgroups in duality groups and in groups of cohomological dimension 2,J. Pure
App. Algebra7 (1976) 35–52.[5] BIERI R., ECKMANN B., Finiteness properties of duality groups,Comment. Math. Helv.49 (1974)
74–83.[6] BIERI R., NEUMANN W., STREBEL R., A geometric invariant for discrete groups,Invent. Math.90
(1987) 451–477.[7] BIERI R., RENZ B., Valuations on free resolutions and higher geometric invariants of groups,
Comment. Math. Helv.63 (1998) 464–497.[8] BIERI R., STREBEL R., Geometric invariants for discrete groups, Frankfurt, Manuscript in progress.[9] BROWN K.S.,Cohomology of Groups, GTM 87, Springer, New York, 1982.
[10] BROWN K.S., Trees, valuations and the Bieri–Neumann–Strebel invariant,Invent. Math.90 (1987)479–504; 451–477.
[11] CHARNEY R., DAVIS M., FiniteK(π, 1)’s for Artin groups, in:Prospects in Topology, Princeton, NJ,1994, pp. 110–124.
[12] DROMS C., Subgroups of graph groups,J. Algebra110(1987) 519–522.[13] ELIASHBERG Y., GROMOV M., Lagrangian intersections and the stable Morse theory,J. Boll. Unione
Mat. Ital., Ser. B11VII (2) Suppl. (1997) 289–326.[14] FARRELL F.T., JONES L.E., Stable pseudoisotopy spaces of non-positively curved manifolds,
J. Differential Geom.38 (1991) 769–834.[15] HOCHSCHILDG., SERREJ.-P., Cohomology of group extensions,Trans. Amer. Math. Soc.74 (1953)
110–134.[16] HU B., Whitehead groups of finite polyhedra with non-positive curvature,J. Differential Geom.38 (3)
(1993) 501–517.[17] GROMOV M., Hyperbolic groups, essays in group theory, in: Gersten S.M (Ed.),M.S.R.I. Publ. 8,
Springer, New York, 1987, pp. 75–263.[18] LATOUR F., Existence de 1-formes fermées non-singulières dans une classe de cohomologie de de
Rham,Publ. Math. IHES80 (1994).[19] LAUDENBACH F., SIKORAV J.-C., Persistance de l’intersection avec la section nulle au cours d’une
isotopie hamiltonienne dans un fibré cotangent,Invent. Math.82 (1985) 349–357.[20] LEVITT G., 1-formes singulières et groupe fondamental,Invent. Math.88 (1987) 635–667.[21] KERVAIRE M., On the theorem of Barden–Mazur–Stallings,Comment. Math. Helv.40 (1965) 31–42.
ANNALES SCIENTIFIQUES DE L’ÉCOLE NORMALE SUPÉRIEURE
320 M. DAMIAN
[22] MAUMARY S., Type simple d’homotopie, in:Torsion et Type Simple d’Homotopie, Lecture Notes inMath., Vol.48, Springer, Berlin, 1967.
[23] MEIER J., MEINERT H., VAN WYK L., Finiteness properties and abelian quotients of graph groups,J. Math. Res. Lett.3 (1996) 779–785.
[24] MEIER J., VAN WYK L., The Bieri–Neumann–Strebel invariants for graph groups,Proc. LondonMath. Soc.71 (1995) 263–280.
[25] MILNOR J., Whitehead torsion,Bull. Amer. Math. Soc.72 (1966) 358–426.[26] NOVIKOV S.P., Multivalued functions and functionals. An analogue of the Morse theory,Soviet. Math.
Dokl. 24 (2) (1981) 222–226.[27] PAJITNOV A., Surgery on the Novikov complex,K-theory10 (1996) 323–412.[28] PAJITNOV A., On the sharpness of Novikov type inequalities for manifolds with free abelian group,
Math. USSR Sbornik68 (1991) 351–389.[29] RENZ B., Thesis, University of Frankfurt, 1987.[30] SHARKO V.V., The stable algebra of Morse theory,Math. USSR-Izv.36 (3) (1991) 629–653.[31] SHARKO V.V., Functions on Manifolds. Algebraic and Topological Aspects, Trans. Math. Mono-
graphs, Vol.131, Amer. Math. Soc., Providence, RI, 1993.[32] SIKORAV J.-C., Un problème de disjonction par isotopie symplectique dans un fibré cotangent,Ann.
Scient. Éc. Norm. Sup.19 (1986) 543–552.[33] SIKORAV J.-C., Problèmes d’intersection et de points fixes en géométrie Hamiltonienne,Comment.
Math. Helv.62 (1987) 61–72.[34] SIKORAV J.-C., Homologie de Novikov associée à une classe de cohomologie réelle de degré un,
Thèse Orsay, 1987.[35] SMALE S., On the structure of manifolds,Amer. J. Math.84 (1962) 387–399.[36] STALLINGS J.R., A finitely presented group whose 3-dimensional integral homology is not finitely
generated,Amer. J. Math.85 (1963) 541–543.[37] STALLINGS J.R., On fibering certain 3-manifolds, in:Topology of 3-Manifolds and Related Topics,
Prentice-Hall, Englewood Cliffs, NJ, 1962, pp. 95–100.[38] THURSTONW.P., A norm on the homology of 3-manifolds,Mem. Amer. Math. Soc.339(1986).[39] TISCHLERD., On fibering certain foliated manifolds overS1, Topology9 (1970) 153–154.[40] WALL C.T.C., Finiteness conditions for CW-complexes,Ann. of Math.81 (1965) 56–69.
(Manuscrit reçu le 13 juillet 1999.)
Mihai DAMIAN
Ecole Polytechnique, Centre de Mathématiques,UMR 7640 CNRS,
91128 Palaiseau cedex, FranceE-mail: [email protected]
4e SÉRIE– TOME 33 – 2000 –N 3

















![[Quentin Meillassoux] Après La Finitude Essai s(BookZZ.org)](https://img.pdfslide.fr/doc/110x75/55cf8f60550346703b9bb448/quentin-meillassoux-apres-la-finitude-essai-sbookzzorg.jpg)










