Embed Size (px)
Citation preview

Guide technique No. 1La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d‘écureuil
ABB drives

2 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 3
© Copyright 2012 ABB. Toutes les dispositions, indications et
caractéristiques sont susceptibles de modification sansréavis.
3BFE64287273 REV C 23.2.2012
Guide technique No. 1La technologie DTC ou le contrôle direct de couple - la technologie la plus évoluée pour la commande des moteurs à cage d‘écureuil

4 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 5
Table des matières
Chapitre 1 - Introduction ...........................................................................7
Généralités .........................................................................................7Pourquoi ce guide? ............................................................................7Contenu du guide ...............................................................................7
Chapitre 2 - Le contrôle direct de couple: les étapes clés d’une révolution technologique ............................................................................................8
Qu’est-ce qu’un entraînement à vitesse variable? ................................8Les différentes techniques de commande des moteurs ........................8Entraînements à courant continu .........................................................9
Les spécificités ..............................................................................9Les avantages .............................................................................10Les inconvénients ........................................................................10
Entraînements à courant alternatif - Introduction ................................11Entraînements à courant alternatif à commande en fréquence, de type MLI ......................................................................................11
Les spécificités ............................................................................11Les avantages .............................................................................12Les inconvénients ........................................................................12
Entraînements à courant alternatif à contrôle vectoriel de flux, de type MLI .....................................................................................12
Spécificités ..................................................................................13Les avantages .............................................................................13Les inconvénients ........................................................................13
Entraînements à courant alternatif à technologie DTC.........................14Variables de commande ....................................................................14Comparaison des différentes techniques de variation de vitesse .........15
Chapitre 3 - Questions et réponses .........................................................17
Généralités .......................................................................................17Les performances .............................................................................18Principes de fonctionnement .............................................................25
Chapitre 4 - Notions théoriques de base .................................................29
Fonctionnement de la technologie DTC .............................................29Boucle de régulation de couple .........................................................30
Etape 1 Mesure de la tension et du courant ..................................30Etape 2 Modèle Moteur Adaptatif .................................................30Etape 3 Comparateur de couple et comparateur de flux ................31Etape 4 Logique de commande optimisée .....................................31
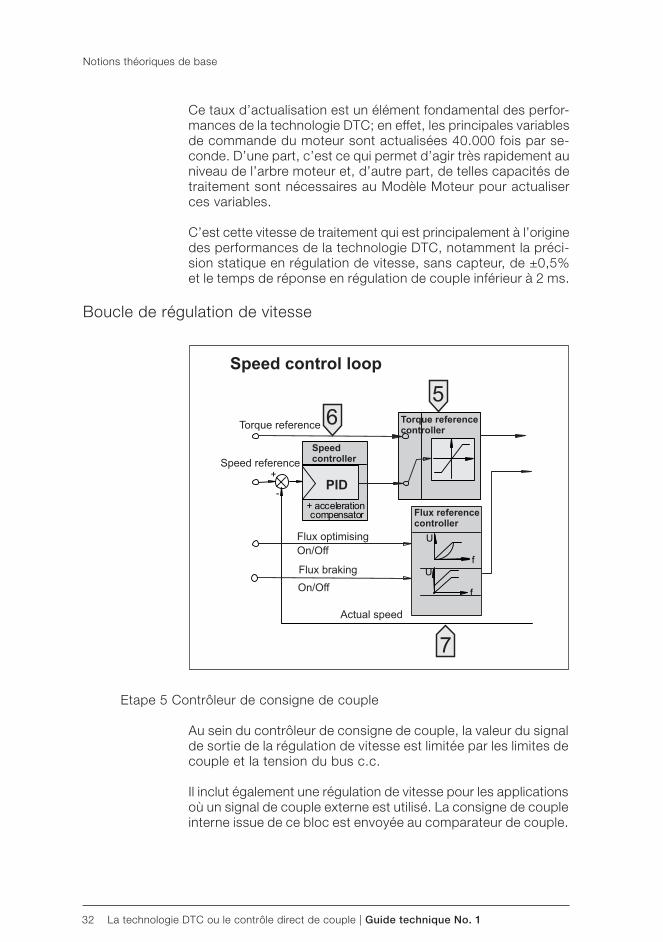
Boucle de régulation de vitesse .........................................................32Etape 5 Contrôleur de consigne de couple ....................................32Etape 6 Régulateur de vitesse ......................................................33Etape 7 Contrôleur de consigne de flux .........................................33
Chapitre 5 - Index ....................................................................................34

6 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 7
Chapitre 1 - Introduction
Généralités
La technologie DTC, ou contrôle direct de couple, est la technique de commande la plus performante des moteurs asynchrones, mise au point par le numéro un mondial de la variation de vitesse.
Pourquoi ce guide?
Ce guide technique a pour ambition de vous expliquer ce qu’est la technologie DTC; l’origine et les étapes de son développement; les fondements théoriques qui justifient le succès qu’elle rencontre; et, enfin, les spécificités et les avantages de cette nouvelle technologie.
Bien que mettant en avant, dans la mesure du possible, les as-pects pratiques, ce guide exige de la part du lecteur des notions de base des principes de commande des moteurs à courant alternatif.
Il est destiné à tous ceux qui doivent faire des choix techniques et économiques - concepteurs, ingénieurs, responsables des achats, constructeurs OEM et utilisateurs finals - dans les domaines d’activité les plus divers tels que distribution et traitement des eaux, industrie chimique, industrie papetière, production d’énergie, manutention/levage, génie climatique, etc.
En fait, pour tous ceux qui connaissent et exploitent des entraînements à vitesse variable et qui désirent tirer pleinement parti des potentiels de la variation de vitesse, ce guide technique constituera un véritable ouvrage de référence.
Contenu du guide
Le contenu de ce guide technique suit le cheminement du développement de la vitesse variable jusqu’à l’avènement de la technologie DTC.
Ceux qui désirent connaître les grandes étapes de l’évolution des entraînements électriques, des techniques à courant continu aux entraînements à courant alternatif jusqu’à la technologie DTC, liront le chapitre 2 (pages 8).
Ceux qu i cherchent p lus par t icu l ièrement à examiner les performances de la technologie DTC, son mode de fonctionnement et les formidables perspectives qu’elle offre pour les applications les plus diverses, passeront directement au chapitre 3, Questions et réponses, page 17.
Enfin, pour une description théorique de la technique de commande DTC, reportez-vous à la page 29.
8 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Chapitre 2 - Le contrôle direct de couple: les étapes clés d’une révolution technologique
Qu’est-ce qu’un entraînement à vitesse variable?
Pour bien comprendre la réponse à cette question, il faut au préalable comprendre que la fonction de base d’un entraînement à vitesse variable est de réguler le débit d’énergie entre le réseau d’alimentation électrique et l’application.
L’énergie est transmise à l’application par l’intermédiaire de l’arbre mécanique du moteur. Deux grandeurs physiques décri-vent l’état de l’arbre moteur: le couple et la vitesse de rotation. Pour contrôler et réguler le débit d’énergie, il faut par conséquent agir sur ces deux grandeurs.
Dans la pratique, on agit sur une de ces deux variables, et on parle alors de “régulation de couple” ou de “régulation de vi-tesse”. Dans un entraînement à vitesse variable fonctionnant en mode régulation de couple, la vitesse est fonction de la charge. De même, lorsqu’il fonctionne en mode régulation de vitesse, le couple est fonction de la charge.
A l’origine, seuls les moteurs à courant continu étaient utilisés pour les entraînements à vitesse variable car ils permettaient d’obtenir la vitesse et le couple requis sans recourir à des dis-positifs électroniques complexes.
Cependant, le développement des variateurs de vitesse à courant alternatif résulte en partie de la volonté d’obtenir les niveaux de performances très élevés des moteurs à courant continu (en termes de temps de réponse en régulation de couple et de précision en régulation de vitesse) avec des moteurs à courant alternatif, réputés pour leur robustesse, leur coût plus abordable et leur simplicité de maintenance.
Les différentes techniques de commande des moteurs
Dans ce chapitre, nous analyserons l’évolution des entraîne-ments à vitesse variable jusqu’à l’avènement de la technique de commande DTC, en reprenant les quatre principales étapes technologiques, à savoir :
– Entraînements à moteurs à courant continu 7 – Entraînements à courant alternatif à commande
en fréquence, de type MLI 9 – Entraînements à courant alternatif à contrôle
vectoriel de flux, de type MLI 10 – Entraînements à courant alternatif à
technologie DTC (contrôle direct de couple) 12
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 9
Variateur c.c.
Régulationde
vitesse
Régulationde
couple
C
Nous étudierons successivement chaque technique de com-mande avec ses avantages et ses inconvénients principaux, pour ensuite présenter une vision d’ensemble mettant en avant les différences essentielles qui existent entre ces quatre techniques.
Entraînements à courant continu
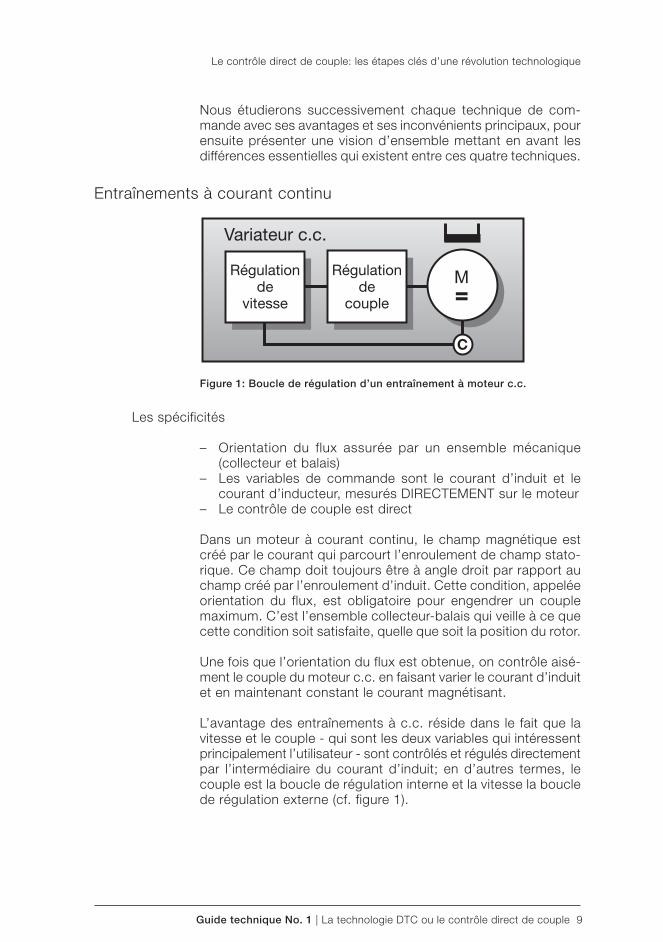
Figure 1: Boucle de régulation d’un entraînement à moteur c.c.
Les spécificités
– Orientation du flux assurée par un ensemble mécanique (collecteur et balais)
– Les variables de commande sont le courant d’induit et le courant d’inducteur, mesurés DIRECTEMENT sur le moteur
– Le contrôle de couple est direct
Dans un moteur à courant continu, le champ magnétique est créé par le courant qui parcourt l’enroulement de champ stato-rique. Ce champ doit toujours être à angle droit par rapport au champ créé par l’enroulement d’induit. Cette condition, appelée orientation du flux, est obligatoire pour engendrer un couple maximum. C’est l’ensemble collecteur-balais qui veille à ce que cette condition soit satisfaite, quelle que soit la position du rotor.
Une fois que l’orientation du flux est obtenue, on contrôle aisé-ment le couple du moteur c.c. en faisant varier le courant d’induit et en maintenant constant le courant magnétisant.
L’avantage des entraînements à c.c. réside dans le fait que la vitesse et le couple - qui sont les deux variables qui intéressent principalement l’utilisateur - sont contrôlés et régulés directement par l’intermédiaire du courant d’induit; en d’autres termes, le couple est la boucle de régulation interne et la vitesse la boucle de régulation externe (cf. figure 1).
Le contrôle direct de couple: les étapes clés d’une révolution technologique
10 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Les avantages
– Régulation de couple précise et rapide – Précision dynamique élevée en régulation de vitesse – Simplicité de la technique de commande
A l’origine, les entraînements à courant continu étaient utilisés pour les applications à vitesse variable du fait de leurs excellentes performances en régulation de couple et de vitesse, en termes de temps de réponse et de niveau de précision.
Les caractéristiques du couple produit par une machine à courant continu sont les suivantes :
– Direct - le couple moteur est proportionnel au courant d’in-duit: il peut ainsi être contrôlé et régulé directement et avec précision.
– Instantané - la régulation de couple est quasi instantanée; le système d’entraînement offre d’excellentes performances dynamiques en régulation de vitesse. Le couple peut être adapté instantanément si le moteur est alimenté par une source de courant idéale. Un entraînement à source de ten-sion offre également des performances de bon niveau car celles-ci sont déterminées uniquement par la constante de temps électrique du rotor (c’est-à-dire l’inductance plus la résistance dans le circuit d’induit).
– Simple - l’orientation du flux est assurée par un ensemble mécanique simple constitué d’un collecteur et de balais. Cette technique s’affranchit donc de circuits de commande électroniques complexes, facteur de surcoût de l’organe de commande du moteur.
Les inconvénients
– Fiabilité des moteurs – Contraintes de maintenance – Coût d’achat élevé des moteurs – Surcoûts des capteurs
L’inconvénient majeur de cette technique est le niveau de fiabi-lité des moteurs à courant continu ; les balais et les collecteurs s’usent et exigent une maintenance régulière ; les moteurs c.c. sont des machines coûteuses à l’achat et à l’entretien, et né-cessitent un capteur de vitesse (dynamo tachymétrique).
Alors qu’un variateur à courant continu permet de contrôler aisément le couple entre la vitesse nulle et la vitesse de base voire au-delà, les éléments mécaniques du moteur sont plus complexes et peuvent exiger une maintenance importante selon les types d’application.
Le contrôle direct de couple: les étapes clés d’une révolution technologique
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 11
Commande en fréquence
Consignede
fréquence
RapportU/f
Modu-lateur
M3 Ph
U
f
Entraînements à courant alternatif - Introduction
– Faible encombrement – Robustesse – Simplicité de conception – Légèreté et compacité – Maintenance réduite – Coût réduit
L’évolution des entraînements à courant alternatif résulte, en partie, de la volonté d’obtenir des performances comparables à celles des entraînements à courant continu, en termes de temps de réponse en régulation de couple et de précision en régulation de vitesse, en utilisant les avantages des moteurs c.a. standard.
Entraînements à courant alternatif à commande en fréquence, de type MLI
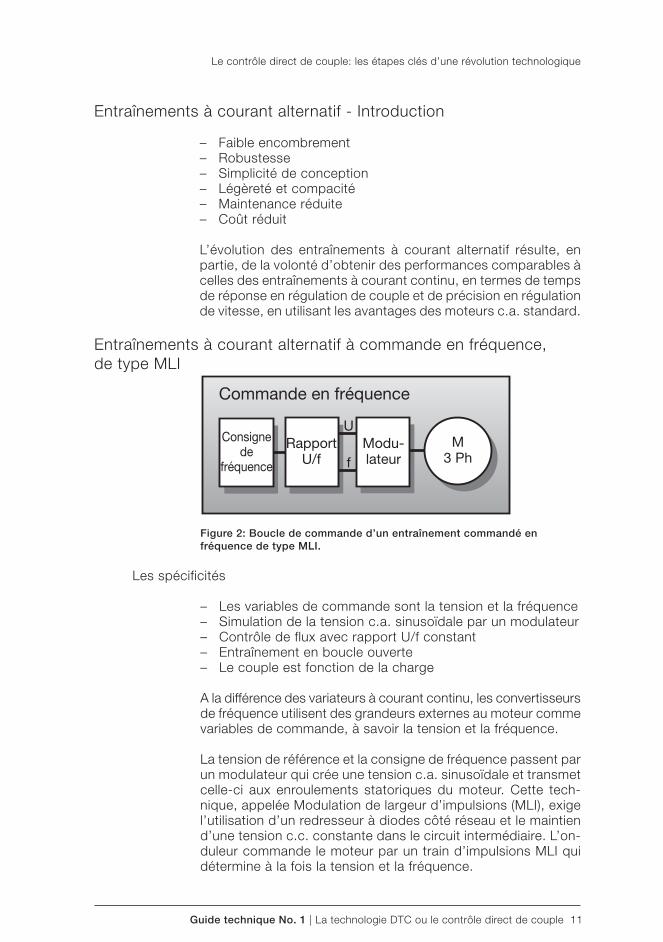
Figure 2: Boucle de commande d’un entraînement commandé en fréquence de type MLI.
Les spécificités
– Les variables de commande sont la tension et la fréquence – Simulation de la tension c.a. sinusoïdale par un modulateur – Contrôle de flux avec rapport U/f constant – Entraînement en boucle ouverte – Le couple est fonction de la charge
A la différence des variateurs à courant continu, les convertisseurs de fréquence utilisent des grandeurs externes au moteur comme variables de commande, à savoir la tension et la fréquence.
La tension de référence et la consigne de fréquence passent par un modulateur qui crée une tension c.a. sinusoïdale et transmet celle-ci aux enroulements statoriques du moteur. Cette tech-nique, appelée Modulation de largeur d’impulsions (MLI), exige l’utilisation d’un redresseur à diodes côté réseau et le maintien d’une tension c.c. constante dans le circuit intermédiaire. L’on-duleur commande le moteur par un train d’impulsions MLI qui détermine à la fois la tension et la fréquence.
Le contrôle direct de couple: les étapes clés d’une révolution technologique
12 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Variateur c.c.
Régulationde
vitesse
Modu-lateur
M3 Ph
Régulationde
couple
C
Cette technique de commande n’utilisant pas de capteur pour mesurer la vitesse de rotation de l’arbre ou sa position angulaire, la boucle de commande ne prend pas en compte ces valeurs.
On appelle “entraînement en boucle ouverte”, ce type de confi-guration sans retour capteur.
Les avantages
– Coût réduit – Simplicité du fait de l’absence de capteur
Cette configuration sans capteur constitue une solution écono-mique relativement simple pour la commande des moteurs asyn-chrones, machines moins onéreuses et plus simples à exploiter.
Ce type d’entraînement est plus particulièrement adapté aux applications exigeant des niveaux de précision limités, comme les applications de pompage et de ventilation.
Les inconvénients
– Pas d’orientation du flux – L’état électromagnétique du moteur n’est pas pris en compte – Pas de contrôle, ni de régulation de couple – Temps de réponse plus longs du fait du modulateur
Avec cette technique, parfois appelée “Contrôle scalaire”, l’orientation du flux du moteur n’est pas contrôlée. Les princi-pales variables de commande sont, dans ce cas, la fréquence et la tension qui sont appliquées aux enroulements statoriques. L’état du rotor n’est pas pris en compte, ce qui signifie qu’on ne dispose pas d’un retour vitesse ou d’un retour position.
Par conséquent, on ne peut en aucun cas agir sur le couple. En outre, cette technique nécessite le passage par un modulateur pour générer les signaux de tension et de fréquence avant leur application au moteur, ce qui rallonge quelque peu les temps de réponse du moteur à toute variation des conditions de fonc-tionnement.
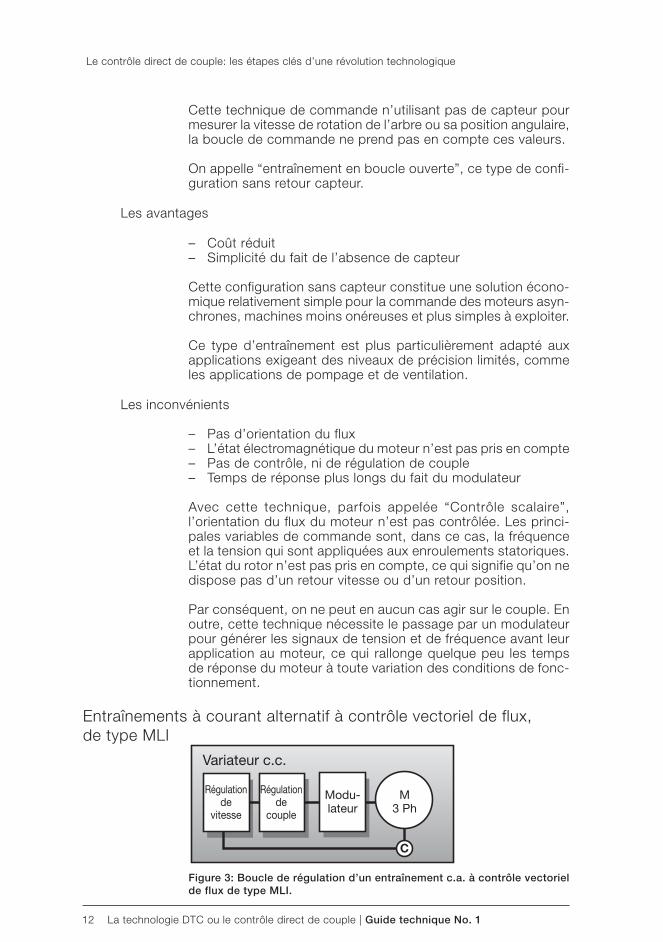
Entraînements à courant alternatif à contrôle vectoriel de flux, de type MLI
Figure 3: Boucle de régulation d’un entraînement c.a. à contrôle vectoriel de flux de type MLI.
Le contrôle direct de couple: les étapes clés d’une révolution technologique
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 13
Spécificités
– Contrôle de l’orientation du flux - comme pour un entraîne-ment c.c.
– Modélisation des caractéristiques électriques du moteur – Entraînement en boucle fermée – Contrôle INDIRECT de couple
Pour simuler les caractéristiques de fonctionnement électro-magnétiques d’un moteur c.c., c’est-à-dire pour contrôler l’orientation du flux, le variateur à contrôle vectoriel de flux doit connaître la position angulaire du flux rotorique à l’intérieur du moteur asynchrone.
Avec un variateur à contrôle vectoriel de flux de type MLI, l’orientation du flux est assurée électroniquement et non plus par l’ensemble mécanique collecteur/balais comme dans le cas d’un moteur c.c.
Dans un premier temps, la vitesse de rotation et la position an-gulaire du rotor par rapport au champ statorique sont mesurées au moyen d’un codeur incrémental. Un entraînement mettant en oeuvre ce type de capteur est appelé “entraînement en boucle fermée”.
Par ailleurs, les caractéristiques électriques du moteur sont modélisées par des microprocesseurs qui traitent les données collectées.
Le circuit de commande d’un variateur à contrôle vectoriel de flux élabore des grandeurs électriques telles que tension, courant et fréquence, qui sont les variables de commande, et transmet ces valeurs au moteur asynchrone par l’intermédiaire d’un modulateur (cf. page11). C’est ainsi que le couple est contrôlé INDIRECTEMENT.
Les avantages
– Temps de réponse courts en régulation de couple – Bonne précision en régulation de vitesse – Couple maxi à vitesse nulle – Performances comparables à celles des entraînements c.c.
La technique du contrôle vectoriel de flux permet d’obtenir un couple maximum à vitesse nulle, offrant des performances très proches de celles d’un entraînement à courant continu.
Les inconvénients
– Utilisation obligatoire d’un capteur – Technique coûteuse – Utilisation obligatoire d’un modulateur
Le contrôle direct de couple: les étapes clés d’une révolution technologique
14 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Contrôle direct de couple (technologie DTC)
Régulationde
vitesse
Régulationde
couple
M3 Ph
Pour obtenir des temps de réponse très courts en régulation de couple et une précision élevée en régulation de vitesse, il faut recourir à un capteur, facteur de surcoût et de complexité pour un moteur asynchrone dont deux atouts clés sont justement faible coût et simplicité.
Par ailleurs, cette technique nécessite la mise en oeuvre d’un modulateur pour traiter les signaux de tension et de fréquence avant qu’ils ne soient appliqués au moteur, ce qui rallonge quelque peu les temps de réponse du moteur à toute variation des conditions de fonctionnement.
Même si le moteur est simple du point de vue mécanique, l’en-traînement est complexe du point de vue électrique.
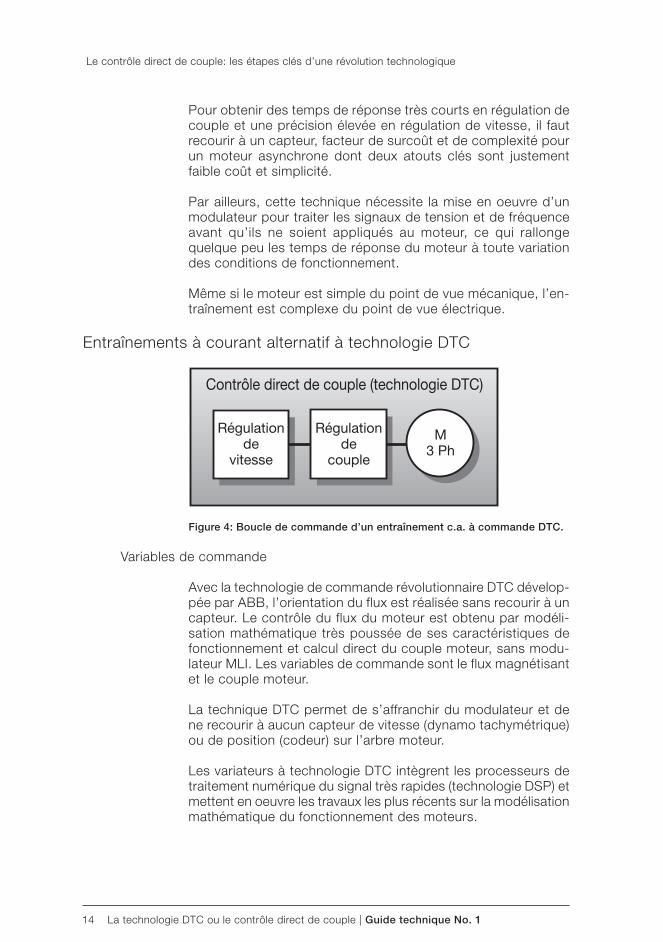
Entraînements à courant alternatif à technologie DTC
Figure 4: Boucle de commande d’un entraînement c.a. à commande DTC.
Variables de commande
Avec la technologie de commande révolutionnaire DTC dévelop-pée par ABB, l’orientation du flux est réalisée sans recourir à un capteur. Le contrôle du flux du moteur est obtenu par modéli-sation mathématique très poussée de ses caractéristiques de fonctionnement et calcul direct du couple moteur, sans modu-lateur MLI. Les variables de commande sont le flux magnétisant et le couple moteur.
La technique DTC permet de s’affranchir du modulateur et de ne recourir à aucun capteur de vitesse (dynamo tachymétrique) ou de position (codeur) sur l’arbre moteur.
Les variateurs à technologie DTC intègrent les processeurs de traitement numérique du signal très rapides (technologie DSP) et mettent en oeuvre les travaux les plus récents sur la modélisation mathématique du fonctionnement des moteurs.
Le contrôle direct de couple: les étapes clés d’une révolution technologique
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 15
Variateur c.c.
Régulationde
vitesse
Modu-lateur
M3 Ph
Régulationde
couple
C
Contrôle direct de couple (technologie DTC)
Régulationde
vitesse
Régulationde
couple
M3 Ph
Variateur c.c.
Régulationde
vitesse
Régulationde
couple
C
Commande en fréquence
Consignede
fréquence
RapportU/f
Modu-lateur
M3 Ph
U
f
On dispose ainsi d’un variateur offrant un temps de réponse en régulation de couple 10 fois plus court que n’importe quel autre variateur à courant alternatif ou courant continu. La précision dynamique en régulation de vitesse est huit fois supérieure à celle des entraînements c.a. en boucle ouverte et comparable à celle d’un entraînement c.c. équipé d’un capteur.
La technologie DTC marque ainsi l’avènement du premier varia-teur “universel” capable de rivaliser avec les variateurs à courant alternatif et les variateurs à courant continu.
Les chapitres suivants de ce guide vont mettre en évidence les spécificités et les atouts de la technique de commande DTC.
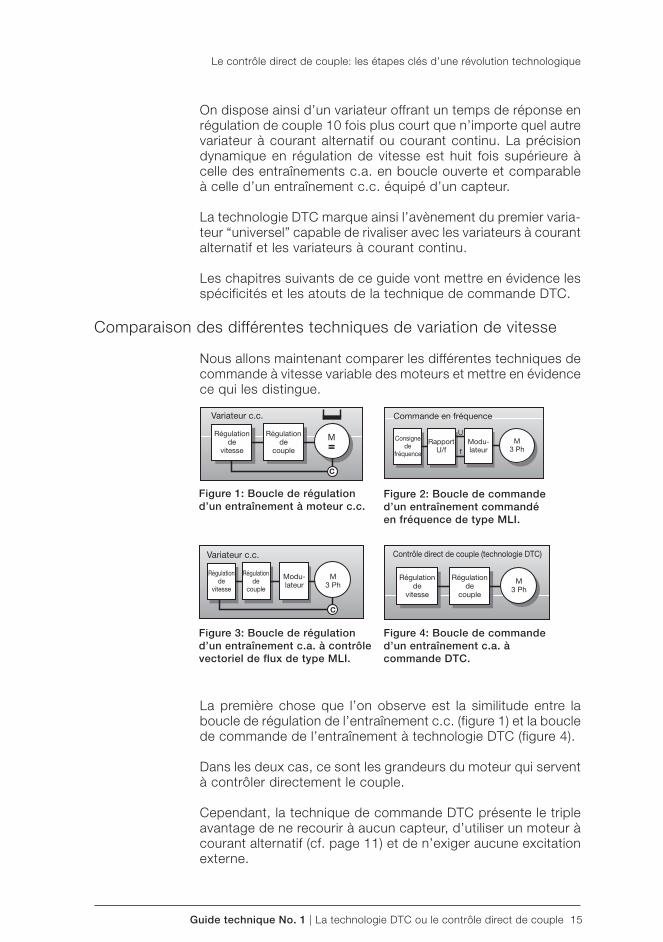
Comparaison des différentes techniques de variation de vitesse
Nous allons maintenant comparer les différentes techniques de commande à vitesse variable des moteurs et mettre en évidence ce qui les distingue.
Figure 1: Boucle de régulation d’un entraînement à moteur c.c.
Figure 2: Boucle de commande d’un entraînement commandé en fréquence de type MLI.
Figure 3: Boucle de régulation d’un entraînement c.a. à contrôle vectoriel de flux de type MLI.
Figure 4: Boucle de commande d’un entraînement c.a. à commande DTC.
La première chose que l’on observe est la similitude entre la boucle de régulation de l’entraînement c.c. (figure 1) et la boucle de commande de l’entraînement à technologie DTC (figure 4).
Dans les deux cas, ce sont les grandeurs du moteur qui servent à contrôler directement le couple.
Cependant, la technique de commande DTC présente le triple avantage de ne recourir à aucun capteur, d’utiliser un moteur à courant alternatif (cf. page 11) et de n’exiger aucune excitation externe.
Le contrôle direct de couple: les étapes clés d’une révolution technologique
16 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
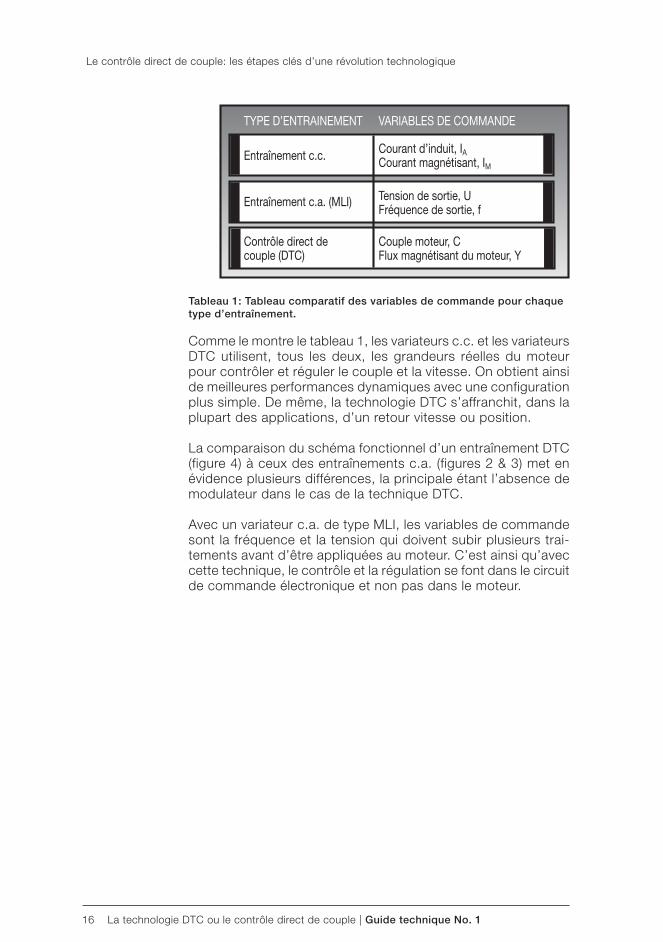
Tableau 1: Tableau comparatif des variables de commande pour chaque type d’entraînement.
Comme le montre le tableau 1, les variateurs c.c. et les variateurs DTC utilisent, tous les deux, les grandeurs réelles du moteur pour contrôler et réguler le couple et la vitesse. On obtient ainsi de meilleures performances dynamiques avec une configuration plus simple. De même, la technologie DTC s’affranchit, dans la plupart des applications, d’un retour vitesse ou position.
La comparaison du schéma fonctionnel d’un entraînement DTC (figure 4) à ceux des entraînements c.a. (figures 2 & 3) met en évidence plusieurs différences, la principale étant l’absence de modulateur dans le cas de la technique DTC.
Avec un variateur c.a. de type MLI, les variables de commande sont la fréquence et la tension qui doivent subir plusieurs trai-tements avant d’être appliquées au moteur. C’est ainsi qu’avec cette technique, le contrôle et la régulation se font dans le circuit de commande électronique et non pas dans le moteur.
TYPE D’ENTRAINEMENT VARIABLES DE COMMANDE
Entraînement c.c.
Entraînement c.a. (MLI)
Contrôle direct de couple (DTC)
Courant d’induit, IACourant magnétisant, IM
Tension de sortie, UFréquence de sortie, f
Couple moteur, CFlux magnétisant du moteur, Y
Le contrôle direct de couple: les étapes clés d’une révolution technologique
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 17
Chapitre 3 - Questions et réponses
Généralités
Qu’est-ce que le contrôle direct de couple?
Le contrôle direct de couple - ou technologie DTC - est la toute nouvelle technique de commande des moteurs c.a. développée par ABB et destinée à remplacer très prochaine-ment les techniques traditionnelles MLI mises en oeuvre dans les entraînements en boucle ouverte et en boucle fermée.
Pourquoi parle-t-on de contrôle direct de couple?
La technique de commande DTC contrôle directement le couple et la vitesse à partir d’informations sur l’état électromagnétique du moteur, comme c’est le cas avec un moteur c.c., mais contraire-ment à la technique de commande des variateurs MLI tradition-nels qui utilise la fréquence d’entrée et la tension. La technologie DTC agit ainsi pour la première fois sur les véritables variables de commande d’un moteur qui sont le couple et le fl ux.Quels sont les avantages d’une telle technique de commande?Parce qu’on contrôle directement le couple et le fl ux du moteur, il n’est pas nécessaire d’utiliser un modulateur pour contrôler la fréquence et la tension, comme c’est le cas des convertisseurs MLI. On supprime ainsi un intermédiaire, ce qui permet à l’en-traînement de réagir beaucoup plus rapidement à toute variation de couple. La technologie DTC offre, par ailleurs, un niveau de précision exceptionnel en régulation de couple sans recourir à un capteur.
Pourquoi encore une autre technologie pour les variateurs c.a.?
La technique de commande DTC n’est pas simplement un enrichissement fonctionnel de la technologie des variateurs à courant alternatif. Les industriels doivent aujourd’hui relever des défis que la technologie actuelle en matière de variation de vitesse est incapable de satisfaire.
Parmi les contraintes aujourd’hui imposées aux industriels, nous citerons:
– Amélioration constante de la qualité des produits fabriqués, ce qui exige notamment une meilleure précision en régulation de vitesse et des temps de réponse plus courts en régulation de couple.
– Moins d’interruptions de production, avec un entraînement qui ne déclenche pas de manière intempestive ; un entraînement
18 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
sans capteur, c’est-à-dire plus simple et plus économique ; et, enfin, un entraînement très peu sensible aux interférences telles que perturbations harmoniques et parasites HF.
– Une solution technique universelle. Une seule et même technologie capable de répondre aux besoins de toutes les applications, à savoir entraînements c.a., c.c. et servo-sys-tèmes. On dispose ainsi d’un véritable variateur “universel”.
– Un confort d’utilisation et un environnement industriel plus agréable avec des entraînements à niveau de bruit plus faible.
Il nous incombe d’aider les industriels à relever de tels défis avec des produits qui satisfont ces contraintes. La technologie DTC contribue à atteindre ces objectifs et offre, en plus, de formidables perspectives d’amélioration (productivité, qualité, rendement énergétique, disponibilité) pour un nombre très im-portant d’applications standard..
Qui est à l’origine de la technologie DTC?
Le programme de recherche ABB sur la technologie DTC fut lancé en 1988, à la suite de la publication des travaux théo-riques en 1971 et 1985 des chercheurs allemands, les docteurs Blaschke et Depenbrock. La technologie DTC s’appuie sur la théorie du contrôle par le flux des machines asynchrones et sur la théorie du contrôle direct de couple. ABB a consacré l’équi-valent de plus de 100 années-hommes au développement de cette technologie.
Les performances
Quels sont les principaux avantages de la technologie DTC sur les techniques de commande traditionnelles des moteurs c.a.?
La technologie DTC présente de nombreux avantages. Ce-pendant, elle offre surtout des performances dynamiques exceptionnelles en boucle ouverte, c’est-à-dire sans recourir à un capteur de vitesse ou de position sur l’arbre moteur. Ces performances se traduisent notamment en termes de:
– Temps de réponse en régulation de couple - Rapidité de réaction de l’entraînement lors de l’application d’un échelon de couple correspondant à 100% de la valeur nominale.
Avec la technologie DTC, le temps de réponse moyen est de 1 à 2 ms en dessous de 40 Hz, comparé à 10 à 20 ms pour les variateurs à contrôle vectoriel de flux et les varia-teurs c.c. avec capteur. Dans le cas des convertisseurs MLI en boucle ouverte (cf. page 10), ce temps de réponse se situe en général bien au-dessus de 100 ms. En fait, avec une telle réactivité, la technologie DTC a atteint les
Questions et réponses
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 19
limites possibles. Au vu des caractéristiques actuelles de l’alimentation électrique (courant et tension), il est techno-logiquement impossible d’obtenir des temps de réponse plus courts. Les tout récents variateurs à contrôle vectoriel de flux “sans capteur” des concurrents offrent des temps de réponse de plusieurs centaines de millisecondes.
– Le couple est entièrement maîtrisé aux basses fréquences et on obtient un couple à pleine charge à vitesse nulle sans utiliser de capteur. Avec la technologie DTC, la vitesse peut être contrôlée jusqu’aux fréquences inférieures à 0,5 Hz tout en maintenant un couple de 100% jusqu’à la vitesse nulle.
– Répétabilité de couple - Aptitude de l’entraînement à repro-duire le couple de sortie à partir d’une même consigne de couple.
Sans retour codeur, la technique de commande DTC offre, en régulation de couple, une répétabilité de 1 à 2% du couple nominal sur toute la plage de vitesse. C’est deux fois mieux que les autres variateurs c.a. en boucle ouverte et compa-rable au niveau de répétabilité des variateurs c.a. et c.c. en boucle fermée.
– Précision statique en régulation de vitesse - Ecart entre la consigne de vitesse et la vitesse réelle à charge constante.
Pour la technologie DTC, la précision de vitesse corres-pond à 10% du glissement du moteur ce qui, dans le cas d’un moteur de 11 kW, équivaut à une précision statique de vitesse de 0,3%. Dans le cas d’un moteur de 110 kW, la précision de vitesse atteint 0,1% sans retour codeur (boucle ouverte). Ces performances sont bien supérieures à celles requises par 95% des applications industrielles à vitesse variable. Cependant, pour obtenir la même précision d’un entraînement c.c., un codeur s’impose.
En comparaison, la précision statique de vitesse des en-traînements à convertisseurs MLI se situe entre 1 et 3%. C’est ainsi que les gains potentiels de productivité et de qualité pour les applications utilisateurs sont beaucoup plus importants avec les variateurs standard à technologie DTC.
Un entraînement DTC équipé d’un codeur simple de 1024 impulsions/tour offre une précision de vitesse de 0,01%.
– Précision dynamique de vitesse - Intégrale de temps de la chute de vitesse lors de l’application d’un échelon de couple nominal (100%). La précision dynamique de vitesse d’un entraînement DTC en boucle ouverte se situe entre 0,3 et 0,4%s. Celle-ci dépend du réglage du gain du régulateur, paramétré en fonction des spécificités de l’application.
Questions et réponses
20 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Avec les autres variateurs c.a. en boucle ouverte, la précision dynamique est huit fois inférieure et se situe autour de 3%s. Lorsque l’on équipe l’entraînement DTC d’un codeur, la pré-cision dynamique de vitesse atteint 0,1%s, comparable aux performances des servo-systèmes.
Quels sont, dans la pratique, les corollaires de tels niveaux de performances?
– Régulation de couple quasi instantanée: - On réduit considé-rablement la durée de la chute de vitesse lors des transitoires de charge, ce qui permet une conduite de procédé beaucoup plus précise et des produits de qualité plus constante.
– Contrôle de couple aux basses fréquences: - Cette fonction-nalité est particulièrement avantageuse pour les équipements de levage et les ascenseurs, où la charge doit être démarrée et arrêtée sans à-coups. De même, dans les applications d’en-roulage, la tension du produit est contrôlée en permanence entre la vitesse nulle et la vitesse maximale. Par rapport aux variateurs MLI à contrôle vectoriel de fl ux, la technique de commande DTC s’affranchit de l’investissement d’un capteur.
– Linéarité du couple: - Cet aspect est particulièrement avantageux pour les applications haute précision telles que les enrouleuses, utilisées dans l’industrie du papier, où un bobinage précis et régulier est capital.
– Précision dynamique de vitesse: - Après toute variation brusque de la charge, le moteur rétablit très rapidement son régime de fonctionnement.
Questions et réponses
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 21
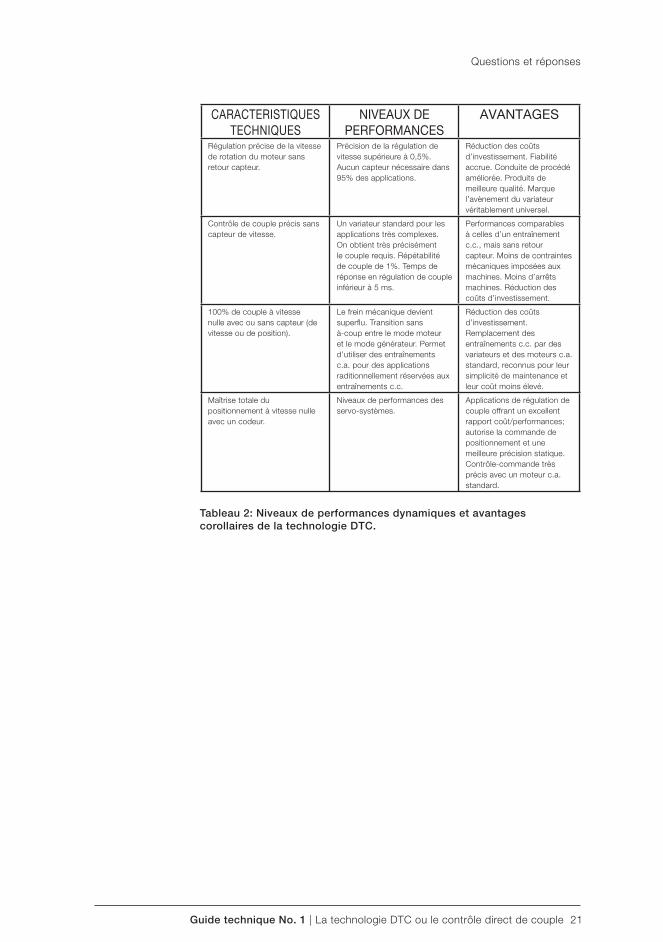
Tableau 2: Niveaux de performances dynamiques et avantages corollaires de la technologie DTC.
CARACTERISTIQUES TECHNIQUES
NIVEAUX DE PERFORMANCES
AVANTAGES
Régulation précise de la vitesse de rotation du moteur sans retour capteur.
Précision de la régulation de vitesse supérieure à 0,5%. Aucun capteur nécessaire dans 95% des applications.
Réduction des coûts d’investissement. Fiabilité accrue. Conduite de procédé améliorée. Produits de meilleure qualité. Marque l’avènement du variateur véritablement universel.
Contrôle de couple précis sans capteur de vitesse.
Un variateur standard pour les applications très complexes. On obtient très précisément le couple requis. Répétabilité de couple de 1%. Temps de réponse en régulation de couple inférieur à 5 ms.
Performances comparables à celles d’un entraînement c.c., mais sans retour capteur. Moins de contraintes mécaniques imposées aux machines. Moins d’arrêts machines. Réduction des coûts d’investissement.
100% de couple à vitesse nulle avec ou sans capteur (de vitesse ou de position).
Le frein mécanique devient superfl u. Transition sans à-coup entre le mode moteur et le mode générateur. Permet d’utiliser des entraînements c.a. pour des applications raditionnellement réservées aux entraînements c.c.
Réduction des coûts d’investissement. Remplacement des entraînements c.c. par des variateurs et des moteurs c.a. standard, reconnus pour leur simplicité de maintenance et leur coût moins élevé.
Maîtrise totale du positionnement à vitesse nulle avec un codeur.
Niveaux de performances des servo-systèmes.
Applications de régulation de couple offrant un excellent rapport coût/performances; autorise la commande de positionnement et une meilleure précision statique. Contrôle-commande très précis avec un moteur c.a. standard.
Questions et réponses
22 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
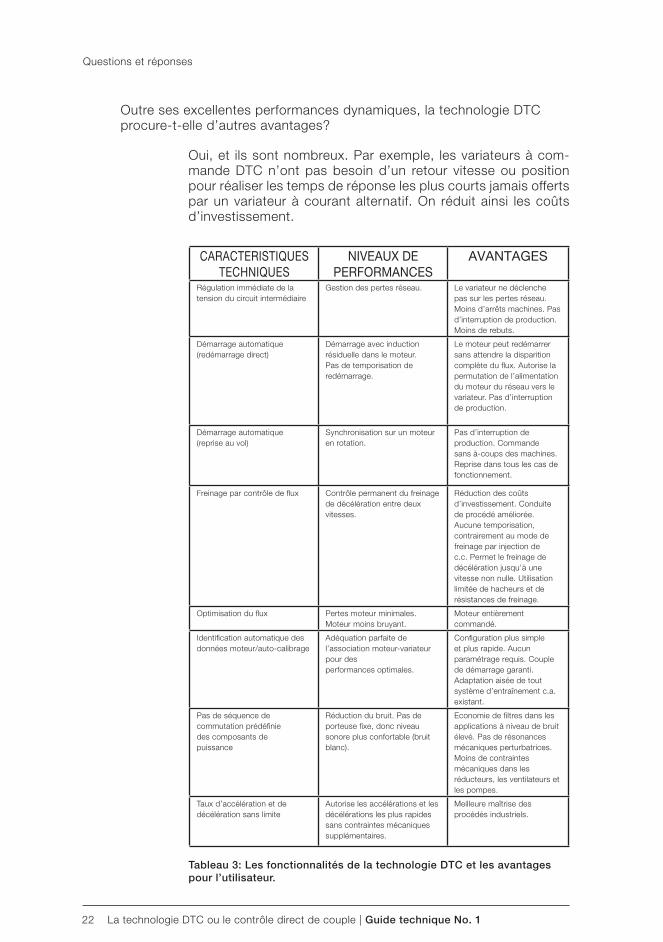
Outre ses excellentes performances dynamiques, la technologie DTC procure-t-elle d’autres avantages?
Oui, et ils sont nombreux. Par exemple, les variateurs à com-mande DTC n’ont pas besoin d’un retour vitesse ou position pour réaliser les temps de réponse les plus courts jamais offerts par un variateur à courant alternatif. On réduit ainsi les coûts d’investissement.
CARACTERISTIQUES TECHNIQUES
NIVEAUX DE PERFORMANCES
AVANTAGES
Régulation immédiate de la tension du circuit intermédiaire
Gestion des pertes réseau. Le variateur ne déclenche pas sur les pertes réseau. Moins d’arrêts machines. Pas d’interruption de production. Moins de rebuts.
Démarrage automatique( redémarrage direct)
Démarrage avec induction résiduelle dans le moteur. Pas de temporisation de redémarrage.
Le moteur peut redémarrer sans attendre la disparition complète du fl ux. Autorise la permutation de l’alimentation du moteur du réseau vers le variateur. Pas d’interruption de production.
Démarrage automatique( reprise au vol)
Synchronisation sur un moteur en rotation.
Pas d’interruption de production. Commande sans à-coups des machines. Reprise dans tous les cas de fonctionnement.
Freinage par contrôle de fl ux Contrôle permanent du freinage de décélération entre deux vitesses.
Réduction des coûts d’investissement. Conduite de procédé améliorée. Aucune temporisation, contrairement au mode de freinage par injection de c.c. Permet le freinage de décélération jusqu’à une vitesse non nulle. Utilisation limitée de hacheurs et de résistances de freinage.
Optimisation du fl ux Pertes moteur minimales. Moteur moins bruyant.
Moteur entièrement commandé.
Identifi cation automatique des données moteur/ auto-calibrage
Adéquation parfaite de l’association moteur-variateur pour des performances optimales.
Confi guration plus simple et plus rapide. Aucun paramétrage requis. Couple de démarrage garanti. Adaptation aisée de tout système d’entraînement c.a. existant.
Pas de séquence de commutation prédéfi nie des composants de puissance
Réduction du bruit. Pas de porteuse fi xe, donc niveau sonore plus confortable ( bruit blanc).
Economie de fi ltres dans les applications à niveau de bruit élevé. Pas de résonances mécaniques perturbatrices. Moins de contraintes mécaniques dans les réducteurs, les ventilateurs et les pompes.
Taux d’ accélération et de décélération sans limite
Autorise les accélérations et les décélérations les plus rapides sans contraintes mécaniques supplémentaires.
Meilleure maîtrise des procédés industriels.
Tableau 3: Les fonctionnalités de la technologie DTC et les avantages pour l’utilisateur.
Questions et réponses
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 23
De même, un entraînement à technologie DTC est capable de démarrer très rapidement, et de redémarrer sans temporisation, quel que soit l’état électromagnétique et mécanique du moteur.
La technologie DTC semble donc être particulièrement avantageuse pour les applications complexes et très sensibles. Qu’en est-il des applications standard?
Les applications standard représentent 70% du marché actuel de la variation de vitesse. Deux des applications les plus courantes sont la ventilation et le pompage dans les secteurs d’activité tels que le génie climatique, l’agro-alimentaire ainsi que la distribution et le traitement des eaux.
Pour ces applications, la technologie DTC permet de résoudre les problèmes liés aux harmoniques et au niveau de bruit.
Avec la technologie DTC on peut, par exemple, commander l’étage d’entrée du variateur, où le pont de diodes, solution classique, est remplacé par un pont tout transistors IGBT à réinjection d’énergie sur le réseau.
Cette configuration permet de réduire de manière significative les harmoniques en entrée. La distorsion de courant de faible intensité avec un pont entièrement commandé à transistors est inférieure à celle d’un variateur traditionnel à pont hexaphasé ou dodécaphasé, ce qui permet d’obtenir un facteur de puissance de 0,99.
Pour les applications standard, les variateurs à commande DTC sont capables de supporter des variations de charges très brusques et très importantes sans jamais déclencher en surtension ou surintensité.
De plus, même en cas de coupure réseau de courte durée, l’en-traînement doit rester alimenté. La tension c.c. du circuit inter-médiaire ne doit pas tomber en dessous du seuil de commande de 80%. Pour satisfaire à ces conditions, le cycle de commande du variateur DTC est de 25 microsecondes.
Quel est l’apport de la technologie DTC dans la commande des pompes?
La technologie DTC présente un intérêt pour tous les types de pompes. Comme elle marque l’avènement du variateur univer-sel, toutes les pompes, qu’elles soient centrifuges ou à couple constant (pompes à vis), peuvent maintenant être commandées avec une même configuration d’entraînement, comme peuvent l’être les ventilateurs et les convoyeurs. Avec la technique de commande DTC, le variateur est auto-adaptatif aux contraintes des différentes applications.
Par exemple, un entraînement à commande DTC d’une pompe à vis sera capable de s’adapter automatiquement pour fournir
Questions et réponses
24 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
le niveau de couple de démarrage requis et garantir ainsi le démarrage.
Une meilleure gestion des pertes réseau est un atout supplé-mentaire pour les pompes qui resteront performantes pendant les microcoupures.
Les performances inhérentes de la technologie DTC en régu-lation de couple permettent de limiter le couple et ainsi éviter les contraintes mécaniques sur les pompes et les réseaux de tuyauterie.
La technologie DTC est-elle source d’économie d’énergie?
Une des innovations marquantes de la technologie DTC, qui permet un meilleur rendement énergétique, est la fonctionnalité d’optimisation du flux moteur.
Celle-ci augmente, en effet, considérablement le rendement glo-bal de l’entraînement (variateur + moteur) dans les applications de pompage et de ventilation.
Par exemple, avec une charge de 25%, on améliore le rendement énergétique global de 10%. A 50% de charge, le rendement global est amélioré de 2%, avec un impact direct sur les coûts d’exploitation.
Cette fonctionnalité réduit également de manière substantielle le bruit au niveau du moteur, par rapport au bruit engendré par la fréquence de commutation fixe d’un convertisseur MLI traditionnel.
La technologie DTC a-t-elle fait ses preuves dans de nombreuses installations?
Oui, le parc installé compte aujourd’hui plusieurs centaines de milliers de variateurs DTC. Nous citerons l’exemple d’un des premiers constructeurs mondiaux d’enrouleuses qui a testé la technologie DTC avec une enrouleuse au sein d’une unité de production de film plastique.
Elément du cahier des charges:
Contrôle et régulation très précis de l’enrouleuse pour obtenir des produits de qualité (film plastique).
La solution:
Les entraînements à technologie DTC en boucle ouverte ont remplacé les entraînements c.c. traditionnels et, ensuite, les variateurs c.a. à contrôle vectoriel de flux des entraînements intermédiaires des rebobineuses.
Questions et réponses
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 25
Les avantages:
Montage plus simple et meilleure fiabilité des stations d’enrou-leuses. Le coût d’un capteur de vitesse et du câblage associé équivaut au coût d’un moteur c.a. de 30 kW, ce qui représente une réduction importante des coûts d’investissement.
Principes de fonctionnement
Qu’est-ce qui distingue la technique de commande DTC des techniques traditionnelles MLI?
– Convertisseur de fréquence MLI et variateur MLI à contrôle vectoriel de flux
Les variateurs MLI utilisent la tension de sortie et la fréquence de sortie comme variables de commande de base, mais celles-ci doivent être modulées en largeur avant d’être appliquées au moteur.
L’étage de modulation rallonge les temps de réponse en régu-lation de couple et de vitesse des variateurs MLI.
En moyenne, un variateur MLI nécessite un temps dix fois plus long qu’un variateur DTC pour réagir à toute sollicitation des valeurs réelles.
– Technique de commande DTC
La technologie DTC utilise le couple et le flux statorique du moteur comme variables de commande de base, celles-ci étant relevées directement sur le moteur. C’est la raison pour laquelle il n’est pas nécessaire d’avoir un modulateur MLI à commande séparée en tension et en fréquence. Un autre atout essentiel de la technologie DTC est l’absence de capteur pour 95% des applications.
Pourquoi la technologie DTC n’a-t-elle pas besoin du retour vitesse ou position de l’arbre moteur?
Les quatre raisons principales sont :
– Le degré de précision de la modélisation mathématique du moteur (cf. page 30).
– Les variables de commande sont rélevées directement sur le moteur (cf. page 30).
– Les vitesses de traitement du processeur DSP et la logique de commutation optimisée (cf. page 31)
– L’absence de modulateur (cf. page 14).
Questions et réponses
26 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Tous ces éléments combinés font du variateur DTC un appareil capable de calculer les tensions de commutation idéales 40.000 fois par seconde, ce qui permet de commander individuellement chaque impulsion de commutation. En d’autres termes, on est jamais allé aussi rapidement.
Toutes les 25 microsecondes, les semiconducteurs de l’onduleur reçoivent une commande de séquence de commutation optimi-sée pour engendrer le couple requis. Un tel taux d’actualisation est bien plus rapide que les constantes de temps du moteur. C’est ainsi qu’aujourd’hui on est limité par les performances du moteur, non par celles de l’onduleur.
Qu’est-ce qui distingue la technologie DTC des technologies “sans capteur” actuellement disponibles sur le marché?
Il y a des différences marquantes entre les variateurs DTC et de nombreux variateurs qualifiés de “sans capteur”. Mais la principale différence réside dans le niveau de précision offert par la technologie DTC aux basses vitesses et même à vitesse nulle sans retour capteur. Aux basses fréquences, l’échelon de couple nominal peut être augmenté en moins d’1 ms. Les autres techniques de commande sont loin derrière.
Pourquoi un variateur DTC est-il en mesure d’offrir les mêmes performances qu’un servo-système?
Tout simplement parce que les performances globales de l’en-traînement sont maintenant limitées par celles du moteur, non par celles du variateur. La précision dynamique moyenne de la régulation de vitesse d’un servo-système est de 0,1%s. Un va-riateur à commande DTC peut atteindre ce niveau de précision dynamique en lui ajoutant un capteur de vitesse.
Qu’est-ce qui permet à la technologie DTC de se démarquer aussi nettement des autres technologies de variation de vitesse?
La différence la plus marquante se situe au niveau des perfor-mances en termes de rapidité de traitement et de communication interne de la technologie DTC. En effet, nous avons déjà mis l’accent sur le temps de réponse exceptionnellement court en régulation de couple.
Pour réaliser des telles performances, ABB a intégré les innova-tions technologiques les plus récentes en matière de traitement numérique du signal (DSP) et a consacré plus de 100 années-hommes pour modéliser de manière très poussée le fonctionne-ment du moteur (Modèle Moteur), qui simule très précisément les grandeurs réelles du moteur au sein du circuit de commande.
Pour une description détaillée des éléments théoriques de la technique de commande DTC, cf. page 29.
Questions et réponses
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 27
Un variateur DTC fait-il intervenir la logique floue dans sa boucle de commande?
Non. Certains variateurs font appel à la logique floue pour main-tenir le courant d’accélération dans les limites définies et éviter, ainsi, tout déclenchement intempestif du variateur. Comme avec la technologie DTC on contrôle directement le couple, le courant est maintenu dans ces limites indépendamment des conditions réelles de fonctionnement.
Un variateur à technologie DTC est réputé être “sans déclenchement”. Comment cela est-il possible?
De nombreux constructeurs cherchent, depuis des années, à résoudre les problèmes de déclenchement lors des accéléra-tions et des décélérations ; ils éprouvent pour cela d’énormes difficultés. Le fonctionnement sans déclenchement du variateur DTC s’explique par le fait qu’il contrôle directement le couple moteur réel.
Mais un variateur qui fonctionne à partir de valeurs calculées, et non mesurées, ne reflètera jamais la réalité. Ce n’est qu’en ayant une image précise du comportement de l’arbre moteur qu’on peut savoir exactement ce qui se passe. Comment la technologie DTC relève-t-elle ce défi?
Le variateur DTC sait exactement ce qui se passe! Comme nous l’avons déjà expliqué, la modélisation très poussée du moteur ainsi que les 40.000 opérations/s permettent au variateur de connaître très précisément, sans aucune zone d’ombre, le comportement et l’état de l’arbre moteur. La preuve en est les performances exceptionnelles en termes de temps de réponse en régulation de couple et de précision de vitesse (cf. chiffres donnés pages 18 et 19).
Contrairement aux variateurs c.a. traditionnels, dans lesquels jusqu’à 30% des commutations sont inutiles, un variateur DTC maîtrise parfaitement toutes les données moteur et ne connaît aucune commutation superflue.
La technologie DTC satisfait pleinement les contraintes de 95% des applications industrielles. Les cas exceptionnels, essentiel-lement les applications aux exigences de précision de vitesse sans compromis, seront résolus en utilisant un capteur et en réalisant ainsi une commande en boucle fermée. Mais ici encore, l’apport de la technologie DTC réside dans l’utilisation d’un capteur de conception plus simple que les capteurs requis par les entraînements traditionnels en boucle fermée.
Questions et réponses
28 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Même avec les semiconducteurs les plus rapides, un certain temps mort est introduit. Par conséquent, quel est le degré de précision de l’auto-calibrage d’un variateur DTC?
L’auto-calibrage se fait lors de la phase initiale d’identification des données moteur par le variateur DTC (cf. page 30). Ce temps mort est calculé et pris en compte par le Modèle Moteur lors du calcul du flux réel. Dans le cas d’un variateur MLI, il y aura ondulation de couple dans la plage de 20 à 30 Hz.
Quel est le niveau de stabilité d’un entraînement à technologie DTC à charges faibles et vitesses réduites?
La stabilité est bonne jusqu’à vitesse nulle et la précision de la régulation de couple et de vitesse est maintenue aux très basses vitesses et aux charges faibles. Nos critères de précision sont:
Précision en régulation de couple: sur une plage de vitesse de 2 à 100% et de charge de 10 à 100%, la précision de la régulation de couple sera de 2%.
Précision en régulation de vitesse: sur une plage de vitesse de 2 à 100% et de charge de 10 à 100%, la précision en régu-lation de vitesse est de 10% du glissement du moteur. Pour un moteur de 37 kW, ce glissement est de l’ordre de 2%, ce qui correspond à une précision de 0,2%.
Quelles sont les limites de la technologie DTC?
Lorsque plusieurs moteurs sont connectés en parallèle à un onduleur à commande DTC, l’ensemble est considéré comme un seul moteur de grande puissance. Le variateur ne dispose pas d’informations sur l’état de chaque moteur. Si le nombre de moteurs varie ou si la puissance du moteur reste inférieure à 1/8 de la puissance nominale, il est préférable de sélectionner le macro-programme de contrôle scalaire.
Un variateur DTC peut-il être associé à n’importe quel type de moteur asynchrone?
Oui, à tous les types de moteurs asynchrones à cage d’écureuil.
Questions et réponses
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 29
Chapitre 4 - Notions théoriques de base
Fonctionnement de la technologie DTC
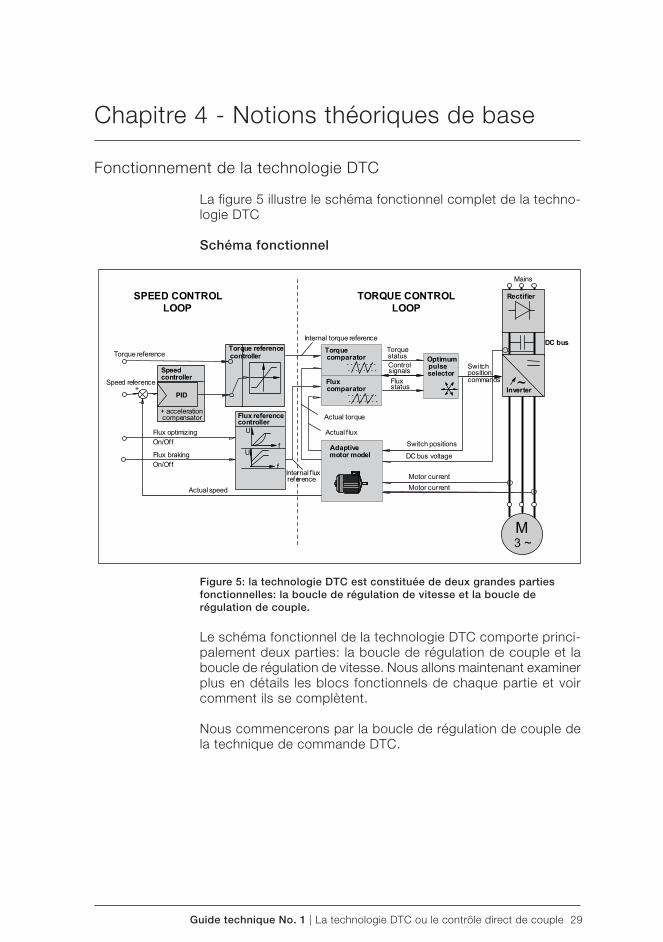
La figure 5 illustre le schéma fonctionnel complet de la techno-logie DTC
Schéma fonctionnel
Figure 5: la technologie DTC est constituée de deux grandes parties fonctionnelles: la boucle de régulation de vitesse et la boucle de régulation de couple.
Le schéma fonctionnel de la technologie DTC comporte princi-palement deux parties: la boucle de régulation de couple et la boucle de régulation de vitesse. Nous allons maintenant examiner plus en détails les blocs fonctionnels de chaque partie et voir comment ils se complètent.
Nous commencerons par la boucle de régulation de couple de la technique de commande DTC.
30 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
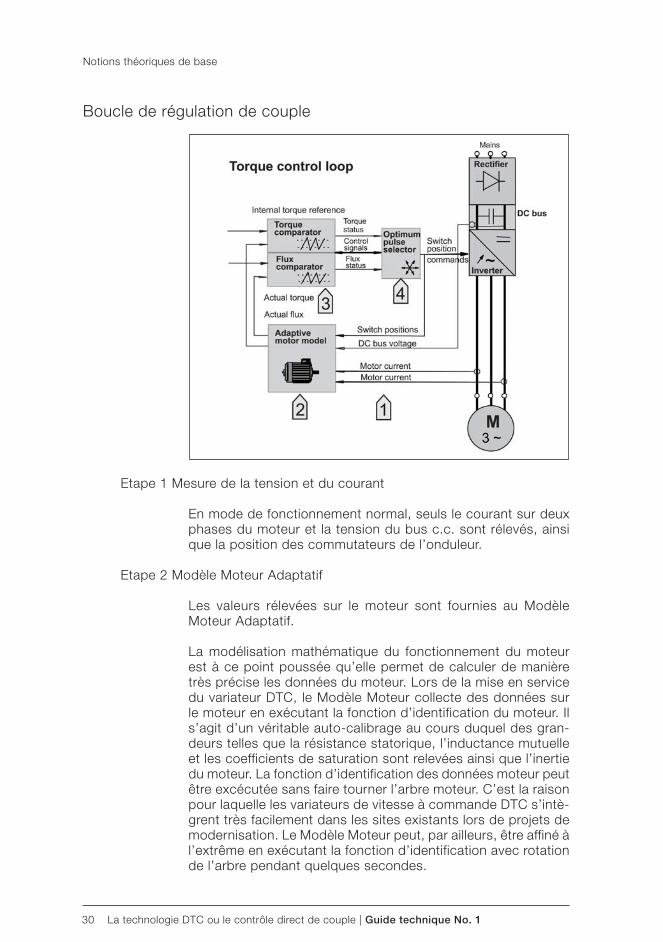
Boucle de régulation de couple
Etape 1 Mesure de la tension et du courant
En mode de fonctionnement normal, seuls le courant sur deux phases du moteur et la tension du bus c.c. sont rélevés, ainsi que la position des commutateurs de l’onduleur.
Etape 2 Modèle Moteur Adaptatif
Les valeurs rélevées sur le moteur sont fournies au Modèle Moteur Adaptatif.
La modélisation mathématique du fonctionnement du moteur est à ce point poussée qu’elle permet de calculer de manière très précise les données du moteur. Lors de la mise en service du variateur DTC, le Modèle Moteur collecte des données sur le moteur en exécutant la fonction d’identification du moteur. Il s’agit d’un véritable auto-calibrage au cours duquel des gran-deurs telles que la résistance statorique, l’inductance mutuelle et les coefficients de saturation sont relevées ainsi que l’inertie du moteur. La fonction d’identification des données moteur peut être excécutée sans faire tourner l’arbre moteur. C’est la raison pour laquelle les variateurs de vitesse à commande DTC s’intè-grent très facilement dans les sites existants lors de projets de modernisation. Le Modèle Moteur peut, par ailleurs, être affiné à l’extrême en exécutant la fonction d’identification avec rotation de l’arbre pendant quelques secondes.
Notions théoriques de base
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 31
Notions théoriques de base
Aucun capteur de position ou de vitesse n’est nécessaire si un niveau de précision statique de vitesse de 0,5% est requis, comme l’exige la plupart des applications industrielles. Il s’agit-là d’un progrès significatif par rapport aux autres technologies de variation de vitesse. En réalité, le Modèle Moteur est la clé des performances inégalées en régulation de vitesse de la tech-nologie DTC.
Les signaux de commande issus du Modèle Moteur correspon-dent directement au couple moteur réel et au flux statorique réel. La vitesse de rotation de l’arbre moteur est également calculée au sein du Moteur Modèle.
Etape 3 Comparateur de couple et comparateur de flux
Les signaux de commande des commutateurs (composants de puissance) sont élaborés dans les comparateurs de couple et de flux.
Les valeurs réelles de couple et de flux sont transmises aux com-parateurs où elles sont comparées, toutes les 25 microsecondes, à une consigne de couple et une consigne de flux. Les signaux d’état de couple et de flux sont calculés selon une méthode de contrôle par hystérésis à double niveau.
Ces signaux sont ensuite transmis à la logique de commande optimisée.
Etape 4 Logique de commande optimisée
Le bloc de la logique de commande optimisée intègre un pro-cesseur numérique du signal de 40 MHz (technologie DSP) et un circuit ASIC dont la fonction est de déterminer la séquence de commutation de l’onduleur. Par ailleurs, tous les signaux de commande sont transmis par liaisons optiques, garantie d’une transmission à très grande vitesse.
Le recours à ces technologies les plus avancées et à de telles vitesses de traitement et de communication permet d’optimiser, toutes les 25 microsecondes, la séquence de commutation des semiconducteurs de l’onduleur, et ainsi produire ou maintenir le couple moteur très précisément.
La séquence de commutation optimale est ainsi établie à chaque cycle de commande de telle sorte qu’il n’y a pas de séquence prédéterminée. Avec la technologie DTC, on peut parler de com-mutation en “juste-à-temps” car, contrairement aux variateurs MLI traditionnels où jusqu’à 30% des commutations ne sont pas nécessaires, chaque opération de commutation dans un variateur DTC résulte d’un besoin et est effectivement utilisée.
32 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Ce taux d’actualisation est un élément fondamental des perfor-mances de la technologie DTC; en effet, les principales variables de commande du moteur sont actualisées 40.000 fois par se-conde. D’une part, c’est ce qui permet d’agir très rapidement au niveau de l’arbre moteur et, d’autre part, de telles capacités de traitement sont nécessaires au Modèle Moteur pour actualiser ces variables.
C’est cette vitesse de traitement qui est principalement à l’origine des performances de la technologie DTC, notamment la préci-sion statique en régulation de vitesse, sans capteur, de ±0,5% et le temps de réponse en régulation de couple inférieur à 2 ms.
Boucle de régulation de vitesse
Etape 5 Contrôleur de consigne de couple
Au sein du contrôleur de consigne de couple, la valeur du signal de sortie de la régulation de vitesse est limitée par les limites de couple et la tension du bus c.c.
Il inclut également une régulation de vitesse pour les applications où un signal de couple externe est utilisé. La consigne de couple interne issue de ce bloc est envoyée au comparateur de couple.
Notions théoriques de base
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 33
Etape 6 Régulateur de vitesse
Le bloc du régulateur de vitesse est constitué d’un régulateur PID et d’un compensateur d’accélération. Le signal de consigne de vitesse externe est comparé à la valeur du signal de vitesse issu du Modèle Moteur. La valeur d’écart est ensuite transmise à la fois au régulateur PID et au compensateur d’accélération. La valeur finale correspond à la somme des valeurs de sortie de ces deux derniers.
Etape 7 Contrôleur de consigne de flux
Une valeur absolue de flux statorique peut être fournie par le contrôleur de consigne de flux au bloc “comparateur de flux”. C’est l’aptitude à contrôler et à modifier cette valeur absolue qui permet de réaliser de nombreuses fonctions du variateur, notamment l’optimisation du flux, le freinage par contrôle de flux et l’affaiblissement de champ (cf. page 22).
Notions théoriques de base
34 La technologie DTC ou le contrôle direct de couple | Guide technique No. 1
Chapitre 5 - Index
AAffaiblissement de champ 31Ascenseur 18Autocalibrage 21, 27, 30
BBasses fréquences 17, 25Blaschke 16Boucle de régulation de couple 28Boucle de régulation de vitesse 28Boucle de régulation 7, 8, 10, 12, 13, 14, 26, 27, 29, 31Boucle fermée 11, 12, 15, 17Bruit du moteur 21, 23Bruit 16, 21, 22, 23
CCapteur 10, 11, 13, 14, 15, 16, 17, 24, 26Champ statorique 12Chauffage 22Circuit ASIC 30Climatisartion 5, 22Codeur de position 13, 24Codeurs 9, 12, 13, 15, 17, 18, 20, 24, 25, 30, 31Coefficient de saturation 30Commande de moteur 8Commande en fréquence 7, 10, 14, 18, 24Comparateur de couple et flux 30Comparateur de couple 30, 31Comparateur de flux 30, 31Compensateur d’accélération 31Constante de temps 8, 25Contraintes 21, 23Contrôle de position 20Contrôle direct de couple 5, 6, 7, 13, 15, 28Contrôle direct 16Contrôle par hystérésis 30Contrôle par le flux 17Contrôle scalaire 11, 26Contrôle vectoriel de flux 7, 11, 12, 14Convoyeurs 22Couple de charge 17, 22Couple moteur 8, 13, 30Couple 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 20, 21, 22, 23, 24, 25, 26, 27, 29, 30, 31- régulation 5, 6, 7, 8, 11, 13, 15, 16, 17, 18, 20, 22, 28- régulation aux basses fréquences 17- charge maxi à vitesse nulle 17- linéarité 18- boucle 24- répétabilité 17, 19- réponse 6, 9, 13, 14, 17, 18, 20, 25, 26, 31- taux d’ondulation 27Courant de champ 7Courant d’induit 7, 8
Courant magnétisant 8Coût d’exploitation 24Coût initial 19Coûts 8, 9, 11, 13, 18, 20, 21, 23Cycle de commande 30
DDéclenchement 16, 21, 22, 26Démarrage 5, 18, 20, 21, 22, 28Depenbrock 16DSP 23, 29DTC 5, 7, 13, 14, 15, 16, 17, 18, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30
EEau 5, 22Echelon de couple nominal 25Economies d’énergie 22Enroulement d’induit 8Enroulement statorique 10, 11Enrouleuse 18Ensemble collecteur-balais 8Entraînement c.a. à vitesse variable 6, 9Entraînement c.a. en boucle ouverte 14Entraînement en boucle ouverte 10Entraînements à vitesse variable 5, 7, 14, 22Entretien 9
FFacteur de puissance 22Fiabilité 9, 20Flux magnétisant du moteur 13Flux rotorique 12Flux statorique 24, 30, 31Frein mécanique 20Freinage par contrôle de flux 21, 31Freinage 21, 31Fréquence de sortie 24Fréquence d’entrée 15
GGénie climatique 22Gestion des pertes réseau 21, 22
HHarmoniques 20, 4
IImpulsions de commutation 25Inductance mutuele 30Industrie agro-alimentaire 22Industrie du papier 18Inertie 30Interférences 16
LLevage 18Liaison optique 30Logique de commande optimisée 30Logique floue 26
Guide technique No. 1 | La technologie DTC ou le contrôle direct de couple 35
MMaintenance 6, 9, 20Mise en service 20MLI 7, 9, 10, 12, 15, 17, 18, 23, 24, 27, 30Modèle moteur 11, 24, 25, 26, 28, 29, 30, 31Modernisation 21Modulateur 10, 11, 12, 13, 15, 24Modulation de largeur d’impulsions 10Moteur asynchrone 11, 12, 13Moteur c.a. 5, 6, 9, 14, 20Moteur c.c. 6, 7, 8, 9, 12, 15
NNiveau de bruit 16
OOEM 5Optimisation du flux 21, 23, 31Orientation du champ 7, 8, 11, 12, 13
PPerte de puissance d’entrée 22Pompe 11, 21, 22, 23Pont de diodes 23Pont d’entrée commandé 22Pont générateur 22Position angulaire 12Position rotorique 8Précision de régulation 20Précision de vitesse dynamique 14, 18Précision de vitesse statique 17, 18, 30Précision de vitesse 6, 9, 13, 14, 16, 17, 18, 20, 26, 27, 30Précision statique 19
RRedémarrage 20Redresseur à diodes 10Réducteur 20Référence de vitesse externe 31Régulateur de référence de couple 29Régulateur de référence de flux 31Régulateur de vitesse 31Régulateur PID 31Régulation de vitesse 6, 8, 26, 28, 31Régulation en boucle fermée 11, 12Réponse en vitesse 8, 24Réseau de tuyauteries 23Résistance statorique 30Retour position 9Rotor 8, 11, 12
SSans capteur 17, 25Séquence de commutation prédéterminée 21, 30Séquence de commutation 21, 25, 30Servosystèmes 18, 20, 25Signal de couple externe 31Sortie de régulation de vitesse 31
Stabilité 27Stator 7, 9, 11, 12, 24, 30, 31
TTachymètre 13, 15, 17, 18, 20, 24, 30Temps de réponse en régulation de vitesse 8Temps de traitement des signaux 24Tension de sortie 24Tension du bus c.c. 29, 31Tension du circuit intermédiaire 20, 21Tension 8, 10, 11, 12, 13, 15, 17, 21, 22, 24, 25, 29, 30Traitement du signal 13, 24, 25Traitement numérique du signal 13, 30
UUniversel 14, 16, 20, 22
VVariables de commande 10, 12, 13, 15, 24Variables de commande 11, 14, 15, 24Variateur alimenté en tension 8Variateur c.a. à contrôle vectoriel de flux 12Variateur c.a. à MLI 12, 15, 17, 18, 23, 24, 27, 30Variateur c.a. à technologie DTC 13, 14Variateur c.a. 7, 10, 12, 13, 14, 15, 16, 17, 18, 20, 26, 30Variateur c.c. 7, 8, 9, 10, 11, 12, 14, 17, 20Variateur électronique 12, 15Variateur MLI à contrôle vectoriel de flux 12Variateur MLI à contrôle vectoriel de flux 18Variateur MLI commandé en fréquence 18Variateur pour moteur c.c. 7Variateurs MLI en boucle ouverte 17Vecteur de flux 7, 11, 12, 14, 17, 18, 24Ventilateur 11, 21, 22, 23Ventilation 22VEV 5, 6Vitesse du rotor 12Vitesse nulle 12, 17, 20, 21, 25, 27Vitesse statique du moteur 17Vitesse 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 21, 22, 24, 25, 26, 27, 29, 30, 31
Index

3BFE
6428
7273
RE
V C
FR
23.
2.20
12 #
1611
3© Copyright 2012 ABB. Toutes les dispositions, indications et caractéristiques sont susceptibles de modification sansréavis.
Pour information plus détaillée, veuillez contactervotre représentant ABB local, ou visiter:
www.abb.com/driveswww.abb.com/drivespartners
Contactez-nous