Embed Size (px)
Citation preview
Université Paris XII Val de Marne
Ecole Doctorale : Sciences et Ingénierie
Habilitation à Diriger des Recherches
Spécialité : Automatique
Méthodes Ensemblistes
pour l'Estimation
Nacim RAMDANI
Soutenue le 9 Décembre 2005
devant le jury constitué de Messieurs :
Rapporteurs : Jean-Pierre MERLET, Directeur de Recherche INRIA Sophia
Joseba QUEVEDO CASIN, Professeur UPC Terrassa
Alain RICHARD, Professeur UHP Nancy
Examinateurs : Alain OUSTALOUP, Professeur ENSEIRB Bordeaux
Eric WALTER, Directeur de Recherche CNRS Gif-sur-Yvette
Etienne DOMBRE, Directeur de Recherche CNRS Montpellier
Yves CANDAU, Professeur UPVM Créteil

Dans mon Habilitation à Diriger les Recherches, le lecteur trouvera d’abord la synthèse de mon activité de recherche, puis en annexe les tirés à parts de publications significatives.
Nacim RAMDANI Décembre 2005

Remerciements
J'aimerai exprimer mes plus vifs remerciements à Messieurs Alain Richard, Joseba
Quevedo Casin et Jean-Pierre Merlet pour avoir accepté d’être les rapporteurs de ce
dossier d’Habilitation à Diriger les Recherches.
Je souhaite exprimer mes plus vifs remerciements à Messieurs Alain Oustaloup, Eric
Walter, Etienne Dombre et Yves Candau pour avoir accepté de participer au jury de cette
Habilitation.
J’aimerai aussi témoigner une reconnaissance particulière à Messieurs Eric Walter et
Etienne Dombre pour la confiance et tout le soutien qu’ils ont accordés à mes projets de
recherche.
J’aimerai exprimer ma reconnaissance et toute mon amitié à Monsieur Yves Candau,
pour avoir apporté un soutien sans faille à toutes mes entreprises.
Lors de ces dix années d’activité d’enseignement et de recherche, j’ai eu la chance de
croiser des collaborateurs de grande valeur qui ont grandement contribué à la réussite de
mon travail. J’aimerai citer (par ordre d’apparition) :
Abdelhamid Mellouk, Gérard Bourdon, Nathalie Didier, Isabelle Braems, Michel Kieffer,
Laurent Ibos, Luc Jaulin, Tarek Raïssi, Laurent Autrique, Philippe Fraisse, Philippe
Poignet, David Guiraud …


à Hélène, Thaïs et Bayan.

Sommaire
INTRODUCTION GÉNÉRALE........................................................................................ 1
CHAPITRE 1 PROPAGATION D'INCERTITUDE
SUR LES SORTIES DE MODÈLES..................................................... 5
1.1 MOTIVATIONS ......................................................................................................................... 5
1.2 PROPAGATION D'INCERTITUDES DE VARIANCE CONSTANTE .................................. 6
1.2.1 Principe....................................................................................................................................... 6
1.2.2 Techniques efficaces pour la sélection des paramètres actifs .................................................. 7
1.2.3 Techniques d’estimation des fonctions de sensibilités.............................................................. 7
1.2.4 Etude de cas en Thermique du bâtiment .................................................................................. 8
1.3 UNE NOUVELLE MÉTHODE POUR
PROPAGER DES INCERTITUDES DE VARIANCE VARIABLE ........................................ 9
1.3.1 Motivations................................................................................................................................. 9
1.3.2 Méthodologie développée ........................................................................................................... 9
1.4 PUBLICATIONS ..................................................................................................................... 11
CHAPITRE 2 ESTIMATION DE GRANDEURS
DANS CONTEXTE À ERREURS BORNÉES ................................... 13
2.1 MOTIVATIONS ....................................................................................................................... 13
2.2 IDENTIFICATION DE PARAMÈTRES ................................................................................ 14
2.2.1 Erreurs additives sur la sortie du modèle............................................................................... 14
2.2.2 Erreurs additives sur la sortie du modèle en présence
de paramètres de nuisance incertains..................................................................................... 16
2.2.3 Encadrement de paramètres ................................................................................................... 18
2.3 ESTIMATION D'ÉTAT ...........................................................................................................18
2.3.1 Modèles algébriques................................................................................................................. 18
2.3.2 Modèles à temps continu.......................................................................................................... 19
2.4 PUBLICATIONS ..................................................................................................................... 20
2.4.1 Estimation de paramètres de modèles linéaires..................................................................... 20
2.4.2 Estimation de paramètres de modèles non-linéaires et à variables complexes .................... 20
2.4.3 Estimation de paramètres et d'états de modèles à temps continu......................................... 21
CHAPITRE 3 MÉTHODES ENSEMBLISTES POUR MODÈLES LINÉAIRES ;
APPLICATION EN ROBOTIQUE. .................................................... 23
3.1 MOTIVATIONS ....................................................................................................................... 23
3.2 ESTIMATION ELLIPSOÏDALE DE PARAMÈTRES........................................................... 23
3.2.1 Intervalles d'incertitudes pour les paramètres identifiés ...................................................... 25
3.2.2 Les approches englobantes de volume minimal, dites "dégénérées"...................................... 25
3.2.3 Méthodes minimisant la taille géométrique de l'ellipsoïde englobant................................... 25
3.3 ESTIMATION PARALLÉLOTOPIQUE ................................................................................ 28
3.4 CONVERGENCE ET TAILLE DE L'ENSEMBLE SOLUTION
DANS UN CONTEXTE STATISTIQUE................................................................................ 31
3.5 MISE EN ŒUVRE EXPÉRIMENTALE : IDENTIFICATION DES PARAMÈTRES
DYNAMIQUES DE ROBOTS MANIPULATEURS .............................................................. 32
3.5.1 Motivations............................................................................................................................... 33
3.5.2 Contributions............................................................................................................................ 33
3.6 PUBLICATIONS ..................................................................................................................... 37
CHAPITRE 4 MÉTHODES ENSEMBLISTES POUR
MODÈLES NON-LINÉAIRES ET À VARIABLES COMPLEXES ;
APPLICATION EN MESURE PHYSIQUE....................................... 39
4.1 MOTIVATIONS : IDENTIFICATION DE PARAMÈTRES.................................................. 39
4.2 CALCULS ENSEMBLISTES PAR LE BIAIS D'INTERVALLES RÉELS .......................... 41
4.2.1 Arithmétique d'intervalles réels. ............................................................................................. 41
4.2.2 Problème de satisfaction de contraintes, contracteurs ........................................................... 42
4.2.3 Inversion ensembliste par arithmétique d'intervalles............................................................ 44
4.2.4 Projection ensembliste par arithmétique d'intervalles........................................................... 44
4.3 CALCULS ENSEMBLISTES PAR LE BIAIS D'INTERVALLES COMPLEXES............... 45
4.3.1 Secteur intervalle : Définition ................................................................................................. 46
4.3.2 Opérations arithmétiques........................................................................................................ 46
4.3.3 Caractérisation de la somme de deux secteurs ....................................................................... 47
4.3.4 Conditions d’optimalité ............................................................................................................ 49
4.4 MISE EN ŒUVRE EXPÉRIMENTALE :
IDENTIFICATION DE PROPRIÉTÉS PHYSIQUES DE MATÉRIAUX............................ 50
4.4.1 Identification garantie de propriétés thermiques en présence de paramètres de nuisance . 50
4.4.2 Sélection de structure et validation de modèles : application à l'analyse des spectres de
relaxation électrique de matériaux ......................................................................................... 52
4.5 PUBLICATIONS ..................................................................................................................... 53
CHAPITRE 5 MÉTHODES ENSEMBLISTES POUR MODÈLES À TEMPS
CONTINU ; ESTIMATION D’ÉTAT ET DE PARAMÈTRES ........ 57
5.1 MOTIVATIONS ....................................................................................................................... 57
5.2 INTÉGRATION NUMÉRIQUE GARANTIE D'ÉQUATION DIFFÉRENTIELLE............. 58
5.3 INTÉGRATION NUMÉRIQUE GARANTIE PAR MODÈLES DE TAYLOR ..................... 60
5.3.1 Existence et unicité de la solution........................................................................................... 61
5.3.2 Solution a priori........................................................................................................................ 62
5.3.3 Réduction de la solution à l'aide de méthodes explicites........................................................ 65
5.4 AUTRES MÉTHODES D'INTÉGRATION NUMÉRIQUE GARANTIE.............................. 69
5.4.1 Méthode de Taylor implicite .................................................................................................... 69
5.4.2 Méthode de Hermite-Obreschkoff............................................................................................ 70
5.5 ESTIMATION D'ÉTAT ...........................................................................................................70
5.5.1 Estimateur causal .................................................................................................................... 71
5.5.2 Estimateur non-causal............................................................................................................. 71
5.5.3 Estimateur d'états à horizon glissant ..................................................................................... 72
5.5.4 Convergence et stabilité des algorithmes................................................................................ 73
5.6 ESTIMATION DE PARAMÈTRES ........................................................................................ 73
5.7 ETUDES DE CAS.................................................................................................................... 74
5.7.1 Concurrence de populations, le modèle de Lotka-Volterra..................................................... 74
5.7.2 Etude de cas en bio-procédé..................................................................................................... 76
5.8 PUBLICATIONS ..................................................................................................................... 77
CHAPITRE 6 PERSPECTIVES ET PROJETS DE RECHERCHES ..................... 79
RÉFÉRENCES BIBLIOGRAPHIQUES ....................................................................... 83
ANNEXES : TIRES A PARTS DE PUBLICATION ............................................... 93

Introduction générale
Les notions de validation et de garantie de résultat sont importantes pour assurer
crédibilité et confiance dans tous les domaines où la prise de décision s'appuie sur la
simulation d'un modèle. Ainsi, c'est le cas dans les domaines de la commande de
processus, du diagnostic et de l'estimation de grandeurs à partir de données
expérimentales. Il en est de même lors de l'évaluation de risque et les études de viabilité
pour le nucléaire, le stockage des déchets radioactifs ou le calcul des ouvrages d'arts etc
...
• La validation de résultat consiste à prouver l'existence ou non de solution pour tout
problème mathématique traduisant des hypothèses au sens physiques et prenant en
compte de manière rigoureuse toutes les sources d'incertitudes qu'elles soient
induites par la modélisation, les données expérimentales utilisées ou
l'implémentation numérique.
• La garantie de résultat signifie "apporter une preuve mathématique aux résultats
obtenus bien que les calculs soient effectués avec une précision finie sur ordinateur".
En plus d'algorithmes spécifiques de résolution globale que je détaillerai plus loin
dans ce document, cela nécessite bien entendu, une implémentation numérique
stable et robuste. En particulier, il est nécessaire de procéder à un contrôle rigoureux
des arrondis lors des calculs avec les nombres codés en virgule flottante.
Mon activité de recherche durant ces 10 dernières a principalement consisté à
développer et évaluer des méthodes permettant de réaliser ces deux objectifs pour des
problèmes réels d'ingénierie.
Cependant, durant les années 1995-2000, j'avais étudié seulement la notion de
validation et uniquement par le biais de méthodes statistiques mais sans garantie. Il
s'agissait à proprement parler de propagation d'incertitude dans les résultats de
simulation de modèles non-linéaires et à temps continu de systèmes dynamiques
complexes ; une thématique de recherche qui s'inscrivait dans la continuité de mes
travaux de thèse de Doctorat [Ram94]. Notre contribution a concerné le développement
et l'évaluation de techniques à faible coût numérique permettant la propagation de
l'incertitude affectant les entrées des modèles que nous prenons au sens large de
paramètres et excitations. Nous avons étudié le cas d'incertitude de variance constante
dans le cadre de la thèse de Doctorat de Mme N.Rahni [Rah98]. J'ai ensuite étudié le cas
d'incertitude de variance variable dans le temps [RCGD05].
C'est donc à partir de 2000 que j'ai traité de manière effective les problèmes de
validation et de garantie, en développant des méthodes ensemblistes, c'est-à-dire des
méthodes qui permettent de manipuler directement des sous-ensembles de ℝn .
L'ensemble résultat d'une opération est alors l'ensemble de toutes les valeurs possibles
que peut prendre le résultat. Les ensembles sont représentés à l’aide de formes
géométriques simples comme des ellipsoïdes par exemple dans le cas linéaire, ou encore
comme des unions de pavés intervalles dans le cas général. De plus, des formulations
numériques spécifiques apportent la garantie numérique aux résultats obtenus.
Par conséquence, les méthodes ensemblistes sont fréquemment utilisées pour apporter
des preuves numériques de propriété et/ou de non-propriété ; en effet, il est possible de
prouver l’absence ou l’existence de solution. Si la solution existe, et si elle n’est pas
unique, les méthodes ensemblistes permettent de caractériser toutes les solutions. Les
sous-ensembles solutions peuvent alors être encadrés par des approximations
extérieures et intérieures, à la résolution désirée. Elles permettent donc de résoudre de
nombreux problèmes réels réputés difficiles car possédant plusieurs solutions discrètes
ou dont la solution, si elle existe, prend la forme de la réunion de sous-ensembles non-
connexes de solutions continues. En robotique par exemple le problème cinématique
direct ou l'étalonnage géométrique de mécanismes parallèles de type Stewart-Gough,
peuvent être résolus de manière efficace par le biais d’une méthode ensembliste fondée
sur l'arithmétique d’intervalles [Mer04]. Les méthodes ensemblistes sont utilisées
aujourd'hui pour résoudre efficacement par exemple, des problèmes de localisation de
robot ou de véhicule mobile [JKDW01], [Dro02], [Bou02], de contrôle robuste [Vil05],
[LHCJ04], de diagnostic [Adr00], [SAV02], [FPG04] et d'estimation [Bra03]. Mais elles
apportent aussi une contribution à la résolution des problèmes rencontrés en vision, en
logique floue, en satisfaction de contraintes etc ...
Néanmoins, il apparaissait en 2000, que les problèmes mettant en jeu des modèles à
variables complexes ou à temps continu disposaient de peu de méthodes de résolution.
Aussi, avons nous développé et évalué des méthodes ensemblistes pour traiter ces types
de problème dans le contexte de l'identification de modèles et l'observation de l'état de
systèmes dynamiques. Ces travaux ont été menés pour partie dans le cadre de la thèse
de Doctorat de Mr T.Raïssi [Raï04] et dans le cadre de collaborations nationales. Il est
intéressant de noter qu'en 2000, cette thématique de recherche était assez peu répandue
dans la communauté scientifique "automaticienne" nationale ou internationale. Enfin, en
montrant que les méthodes ensemblistes peuvent résoudre efficacement les problèmes
réels rencontrés dans le cadre de mes recherches, j'ai tenté de contribuer à une plus
large diffusion de ces méthodes dans le domaine de l'ingénierie.
Je présente dans ce document une synthèse détaillée de ces travaux de recherche. Elle
est composée de deux parties décrivant des méthodologies bien distinctes :
• La première partie constituée du chapitre 1 concerne la propagation d'incertitude
dans les modèles de connaissances de systèmes dynamiques non-linéaires. J'y
présenterai les différentes méthodes que nous avons développées et fournirai une
synthèse des résultats obtenus [RRCD97], [RCGD05].
• La seconde partie traite des méthodes ensemblistes pour l'estimation et est
constituée des chapitres 2, 3, 4 et 5.
– Le chapitre 2 introduit l'approche déterministe, dite à erreurs bornées, pour
l'estimation de paramètres ou de l'état d'un système. Les méthodes ensemblistes
permettant de procéder à cette estimation dépendent du type de modèle utilisé :
linéaire, non-linéaire, ou décrit par une équation différentielle. Elles seront donc
présentées dans trois chapitres différents.
– Le chapitre 3 introduit les méthodes ensemblistes permettant de traiter le cas des
modèles linéaires. J'aborderai les filtrages ellipsoïdal et parallélotopique et
présenterai une synthèse de leur évaluation sur des modèles et des données
réelles issus de la robotique [RP05], [PRV03a,b,c], [RP06].
– Le chapitre 4 traite du cas des modèles non-linéaires mais à valeur complexe. Je
rappellerai les calculs ensemblistes par le biais d'intervalles réels puis introduirai
une nouvelle arithmétique d'intervalles complexes où ces derniers sont
représentés sous la forme de secteurs [CRRI06]. Enfin, je présenterai une
synthèse de la mise en œuvre de toutes ces méthodes sur des modèles et des
données expérimentales issus du contexte de la mesure de propriétés physiques
de matériaux (par ex. [BRKW03], [BRB+05], [RIRC05]).
– Le chapitre 5 traite du cas des modèles décrits par des équations différentielles
non-linéaires. Nous utilisons des techniques d'intégration numérique garantie
d'équations différentielles par modèles de Taylor intervalle. Je présenterai de
manière didactique ces outils, introduirai les observateurs et estimateurs
ensemblistes que nous avons développés et fournirai une synthèse de leur
évaluation sur des données simulées [RRC04], [RRC05].
Je conclus ce document par les perspectives recherches proposées pour la période 2005-
2010. J'indiquerai d'abord les développements méthodologiques qui me paraissent
nécessaire pour permettre aux méthodes ensemblistes de résoudre les problèmes
d'estimation, en des temps de calculs raisonnables, pour une plus grande classe de
problèmes réels. Ensuite je propose deux projets s'appuyant sur des méthodes
ensemblistes : le premier concerne la commande en locomotion artificielle et le second
l'estimation de grandeurs physiques avec comme application le diagnostic de matériaux.
Enfin, le lecteur trouvera en annexe, le texte complet des publications les plus
significatives choisies au sein de ma production scientifique.
Chapitre 1
Propagation d'incertitude
sur les sorties de modèles
1.1 Motivations
La mesure de la confiance que l’on peut accorder à un résultat de simulation fait l'objet
d'une préoccupation continue depuis plusieurs décennies, on peut lire à ce sujet l'état de
l'art assez complet sur ce sujet dans [HJO04]. Dans le cadre de nos travaux de recherche,
nous avons utilisé une analyse d'incertitude et une analyse de sensibilité.
• L’analyse d’incertitude des modèles s’attache à évaluer l’incertitude induite sur la
sortie du modèle par les erreurs affectant paramètres et excitations. L’approche la
plus naturelle s’appuie sur des échantillonnages aléatoires (Monte Carlo), elle
présente néanmoins des propriétés de convergence assez médiocres, la variance de
l'estimateur étant proportionnelle à 1 N , N étant le nombre de tirages aléatoires ;
elle conduit donc à des temps de calcul très importants. Des techniques dites de
réduction de variance, consistant en un choix judicieux des nombres aléatoires,
permettent parfois d’accélérer la convergence [PTVF92, pp.309]. On obtient aussi une
meilleure convergence en utilisant des échantillonnages stratifiés comme le réalise la
méthode de l'hypercube latin [PTVF92, pp.315].
• L'analyse de sensibilité vise à déterminer parmi les entrées du modèle (ici prises au
sens large de paramètres ou excitations) celles dont l'incertitude agit le plus sur le
résultat de simulation. On parlera d'entrée "active" ou "influente". En général, pour
des modèles de connaissances construits avec un grand nombre de paramètres
physiques, il arrive souvent qu’un faible nombre de ces derniers soient véritablement
influents.
Notre recherche vise à procéder à ces deux analyses par le biais de techniques rapides.
Aussi, nous avons exploré les méthodes dites différentielles :
– Dans le cadre de la thèse de Mme N. Rahni [Rah98], nous avons évalué différentes
méthodes existantes pour le cas des incertitudes de variance constante.
– Pour le cas des incertitudes de variance variable dans le temps, j'ai développé une
méthode originale fondée sur une décomposition du modèle en structure de

Hammerstein et un développement en série de Volterra de la partie invariant dans le
temps de cette dernière [RCGD05].
1.2 Propagation d'incertitudes de variance constante
Dans cette partie, je présente les travaux de recherche correspondant aux résultats
obtenus dans le cadre de la thèse de Mme N. Rahni [Rah98].
1.2.1 Principe
L’évaluation de l’incertitude induite sur la sortie d'un modèle par des erreurs de variance
constante affectant paramètres et excitations peut être réalisée par des méthodes
différentielles, fondées sur les fonctions de sensibilités du modèle, c’est-à-dire les dérivés
paramétriques. A condition de calculer les sensibilités sans surcoût numérique excessif,
ce qui peut être réalisé en écrivant une équation de sensibilité, il est possible d’obtenir
une évaluation rapide des intervalles de confiance ou d’incertitude des sorties du
modèles.
La variance de la sortie du modèle non-linéaire décrit par l'expression formelle suivante
( ) ( )( )= , ,y t H t tu (1.1)
où u désignent le vecteur des entrées et θθθθ le vecteur des paramètres du modèle, peut être
approchée par une relation différentielle obtenue par le biais d'un développement de
Taylor du premier ordre, soit
( ) ( )( )θσ σ
θ
∂ ≈ ∂ ∑
2
2 2, ,
iy
i i
H t tt
u(1.2)
Remarque 1 : On notera qu'il n’est pas nécessaire que la relation (1.1) soit fournie par
une relation explicite.
Remarque 2 : Il aussi possible de calculer une approximation de la norme L1 de l'erreur,
c'est-à-dire, l'erreur maximale commise. Cette dernière est alors donnée par
( ) ( )( )θθ
∂ ∆ ≈ ∆∂ ∑ , ,
iy
i i
H t tt
u(1.3)
où θ∆ ireprésente l'incertitude maximale affectant le paramètre θi .
1.2.2 Techniques efficaces pour la sélection des paramètres actifs
L’analyse des effets des variations des paramètres permet la détermination des
paramètres « actifs », c’est-à-dire ceux dont l’incertitude (ou encore la variance) agit le
plus sur le résultat de simulation. Dans le cadre d’une analyse de sensibilité, cette
recherche des paramètres influents et la qualification de leurs effets relèvent du
screening des paramètres.
Nous avons évalué deux méthodes pour la détermination rapide des paramètres les plus
actifs lors du screening : ce sont le screening par groupes [Wat61] et le screening
différentiel c’est-à-dire par le biais des fonctions de sensibilités.
Pour réaliser un screening par groupes, on utilise des plans d'expériences numériques
dans lesquels les facteurs sont constitués de groupes de paramètres physiques. En
général, les plans factoriels utilisés sont saturés (comme celui de Plackett et Burman
[PB46]. Ces techniques souffrent néanmoins de quelques faiblesses. D'abord, il est
nécessaire de connaître le sens des effets des paramètres d'un même groupe, ceux-ci
pouvant se compenser si les effets sont de signes opposés. Ensuite, l'utilisation de plans
saturés rend délicate le test de signifiance des effets évalués pour chaque groupe.
Par le biais des mises en œuvre numériques que nous avons réalisées, nous avons
montré que le screening par groupes reste sensible à la connaissance a priori du sens de
variation des paramètres et il nécessite souvent plusieurs essais en changeant la
constitution des groupes [RRCD97], [RRCD95]. En revanche, le screening différentiel
donne des résultats immédiats mais nécessite le calcul préalable des fonctions de
sensibilités [RRCG98].
Pour plus de détail, le lecteur pourra se reporter au document joint en annexe [RRCD97,
Application of group screening to dynamic buildings energy simulation models].
1.2.3 Techniques d’estimation des fonctions de sensibilités
L’analyse de sensibilité différentielle s’appuie sur les fonctions de sensibilités qui sont
les dérivées de la sortie par rapport aux paramètres. Nous avons testé et comparé les
fonctions de sensibilités obtenues par résolution de l’équation de sensibilité [WP97] et
celles obtenues par plans d’expériences. Dans ce dernier cas, il s'agit d'identifier la
surface de réponse du modèle dans le plan paramétrique ; nous avons testé différents
plans : la méthode des perturbations connue aussi sous le nom de plan un-à-la-fois, des
plans factoriels fractionnaires comme ceux de Rechtschaffner [Rec67] ou de Doelhert
[Doe70] et les plans saturés de Plackett et Burman [PB46].
1.2.4 Etude de cas en Thermique du bâtiment
L’application de l’analyse de sensibilité permet une meilleure compréhension des
interactions entre les phénomènes physiques mis en jeu dans les systèmes dynamiques
complexes. Nous avons procédé à différentes étude de cas en thermique du bâtiment.
(i) Analyse des réponses temporelles : Nous avons étudié des modèles correspondant à
l'enveloppe thermique de bâtiments réels similaires à celui montré à la figure 1 ; ils
mettent en jeu des équations différentielles faiblement non-linéaires mais
correspondent à des systèmes numériques raides. La taille du vecteur d'état ne
dépasse pas quelques dizaines mais le nombre de paramètres physiques présents
dans les modèles atteint le nombre de 400. La sortie considérée est la température
de zone intérieure, alors que cette dernière est chauffée par un convecteur
électrique et le bâtiment soumis aux conditions climatiques naturelles. Nous avons
montré que le jeu de paramètres réellement influents ne représente pas plus de
15% du jeu de paramètre initial. De plus, les paramètres sélectionnés sont tous en
rapport avec les éléments de l’enveloppe qui échangent le plus avec la zone dont on
simule la température [RRCD97]. Nous avons aussi montré que dans les contextes
étudiés, les intervalles de confiance calculés par le biais des méthodes
différentielles étaient comparables aux intervalles de confiances obtenus par
échantillonnages aléatoires. En ce qui concerne les fonctions de sensibilité, les
dérivées obtenues par calcul exact et par plan d’expériences sont similaires, compte
tenu du fait que les effets des paramètres influents sont dans la majorité des cas,
linéaires [RRCG98a].
Figure 1. Exemple de bâtiment réel étudié.
(ii) Analyse des réponses fréquentielles : Les fonctions de sensibilité de modèles
dynamiques calculées dans le domaine temporel restent liées à la forme des
excitations. Afin d’obtenir des résultats traduisant un comportement intrinsèque
du système physique, on peut analyser les fonctions de sensibilité des réponses
fréquentielles. Dans le cas du modèle de thermique d'un bâtiment réel, nous avons
pu établir un lien entre les phénomènes physiques tels que l'accumulation de
chaleur dans les murs du bâtiment telle que modélisée et le comportement
dynamique de ce dernier [ERC00].
1.3 Une nouvelle méthode pour propager des incertitudes de
variance variable
1.3.1 Motivations
Les excitations des systèmes complexes sont parfois affectées de bruits de mesure
stochastiques ou d’incertitudes de variance variable dans le temps. Il peut aussi en être
de même pour les paramètres de modèles. Or, la propagation de telles incertitudes
variables dans le temps ne peut être traitée par le biais de développements de Taylor. En
effet, les séries de Taylor peuvent caractériser les relations entrée-sortie seulement pour
des systèmes statiques. Aussi, ai-je développé une nouvelle méthode, fondée sur un
développement en série de Volterra, afin de réaliser, à faible coût numérique, cette
propagation d'incertitude.
1.3.2 Méthodologie développée
Considérons le système dynamique décrit par la relation entrée-sortie (1.1). Pour
simplifier la présentation, je supposerai le système mono-entrée, elle sera aisément
généralisable au cas multi-entrées. On a
( ) ( )( )= , ,y t H u t t (1.4)
où la fonction H peut être non-linéaire. u(t) représente l’excitation du modèle et θθθθ le
vecteur des paramètres, supposé constant.
L’objectif du développement est d’évaluer l’effet sur la sortie du modèle d’une incertitude
( )δu t affectant l’excitation, ce qui correspond à la grandeur
δ δ δ θ θ= + −( ( ), ) ( ( ) ( ), , ) ( ( ), , )y u t t H u t u t t H u t t (1.5)
L’idée ici est d’utiliser un développement en série de Volterra – voir par exemple [Sch98].
Pour cela, je suppose que la relation (1.4) peut prendre la forme d'une structure de

Hammerstein, c'est-à-dire qu'elle se décompose comme suit
( ) ( )( )θ θ= = Υ( ( ), , ) ,y t H u t t v t (1.6)
et ( ) ( )( )= ,v t g u t t (1.7)
et où les fonctions Y et g satisfont, au moins localement autour du point nominal de
fonctionnement et pour la durée temporelle considérée, les propriétés suivantes,
( ) ( )( )θ θ∀ fixé, , Y , est invariant par translation temporellev t v t (1.8)
et ( ) ( )( )∀ ∀, , , est sans mémoiret u t g u t t (1.9)
En utilisant le noyau d’ordre 1 de la fonction Y et une dérivée partielle de la fonction g,
on obtient la relation différentielle recherchée :
( )( ) ( ) ( ) ( )δ δ τ τ δ τ τ ο δ∞
−∞
= − − +∫ 2
1, ( )y u t t h K t u t d u (1.10)
où la grandeur K est définie par
( ) ( ) ( )( ) ( )( ) ( )( )δ
κ δ κκδδ→
∆ = − ∆ =∀ ≡ ∆ = =
∆ 0
0, 0 lim
t tdK t t
d t(1.11)
et ( )( ) ( ) ( )( )κ ∆ ≡ + ∆ fixé, ,t t g u t t t (1.12)
La relation (1.10) permet d'exprimer des fonctions de sensibilité de la sortie du modèle
par rapport aux erreurs affectant les entrées. De plus, elle est aisément généralisée au
cas multi-entrées ; on peut alors établir une approximation différentielle pour exprimer
la variance de la sortie du modèle, induite par les erreurs affectant les entrées.
Deux types d’erreurs ont été considérées : les erreurs systématiques et les erreurs
stochastiques.
Les erreurs stochastiques sont en fait des processus aléatoires décrits par des fonctions
de probabilité. Dans mon étude, j'ai considéré qu'elles étaient de moyenne nulle et de
variance ( )σ 2i t . A l'aide de (1.10), la variance de la sortie y(t) est obtenue par
( ) ( )δσ τ τ σ τ τ∞
= =−∞
≈ − − ∑ ∑∫
2
2 2
( )
1 1
( )imn
y t l l i
i l
h K t t d (1.13)
où n indique le nombre d'excitations mesurées (et donc incertaines) et où mi indique le
nombre de réponses impulsionnelles "excitées" par la grandeur mesurée. En thermique
du bâtiment par exemple, le rayonnement solaire est mesuré une seule fois, mais "excite"

le modèle dynamique à plusieurs endroits : façades extérieurs, vitrages extérieurs, parois
intérieures, etc .... : une seule incertitude de mesure nécessitera l'utilisation de plusieurs
réponses impulsionnelles.
Quant aux erreurs systématiques, elles sont décrites par la relation suivante :
δ ζ= ∆ ⋅( ) ( )i i iu t t (1.14)
où ∆(t) est une fonction déterministe du temps et où ζ est une variable aléatoire de
moyenne nulle et de variance σ2. La variable aléatoire ζ représente la réalisation d'une
erreur systématique qui reste constante durant toute la période de mesure, et donc aussi
pendant la simulation de modèle. La variance de la sortie du modèle s'écrit pour ce cas,
de la manière suivante :
( ) ( )δσ τ τ τ τ σ∞
= =−∞
≈ − ∆ − ∑ ∑∫
2
2
( )
1 1
( )imn
y t l l i i
i l
h K t t d (1.15)
Les nouvelles relations (1.13) et (1.15) ont été appliquées au modèle de thermique du
bâtiment réel illustré à la figure 1, mettant en jeu 8 excitations avec incertitudes
systématiques de variance variables dans le temps et 10 réponses impulsionnelles. Elles
ont rendu possible le calcul de l'intervalle de confiance pour la simulation avec une
précision très satisfaisante tout en divisant par 20 le temps de calcul comparativement à
une méthode de Monte Carlo.
Pour plus de détail, le lecteur pourra se reporter au document joint en annexe [RCGD05,
Sensitivity analysis of dynamic models to uncertainties in inputs data with time-varying
variances].
1.4 Publications
Dans cette partie, seuls les résumés des publications les plus significatives sont indiqués.
[RCGD05] N. Ramdani, Y. Candau, G. Guyon, C. Dalibart, Sensitivity analysis of dynamic models touncertainties in inputs data with time-varying variances, Technometrics, à paraître en2005.
This article deals with the differential computation of sensitivity functions and confidenceintervals for model output, when model inputs are subject to systematic or stochastic uncertaintieswith time-varying variances. The nonlinear, time-varying systems dealt with correspond to theclass of nonlinear systems with time-invariant dynamics and boundary conditions involvingalgebraic-only equations. It is shown that the first-order kernel of a Volterra series expansion of thetime-invariant model, allied with a derivation of the algebraic equations, can be used to deriveapproached differential formulas. These are applied to the case study of a real-size building thermal

dynamic model developed with the Clim2000 software; the results are compared with Monte Carlosampling and show very good agreement.
[RRCD97] N. Rahni, N. Ramdani, Y. Candau, P. Dalicieux, Application of group screening todynamic buildings energy simulation models, Journal of Statistical Computation Simulation57(1-4): 285-304, 1997.
In order to select the most influential parameters of a building thermal model, a group screeningtechnique was conducted. This technique uses regression analysis and experimental Plackett andBurman designs. After 136 simulations, 23 factors were selected from the initial set of 390. Wecame to the conclusion that global output variations (obtained with all parameters) can beaccurately predicted from these 23 parameters. On the other hand, the results confirmed thatgroup screening can be employed in the case of building energy models, despite the fact that thesigns of the parameter effects are unknown. For the analysed configuration, the effects were foundto be strongly influenced by the exchanged heat flows. In addition, the influential parameters (withrespect to the inner air temperature) were all related to the building components having the largestheat exchange with the air cell.
[RRCG98a] N. Rahni, N. Ramdani, Y. Candau, G. Guyon, Application of exact differential screeninganalysis to dynamic building energy simulation models, in J.Henriette, P.Lybaert,, M. ElHayeck (eds.), Advanced concepts and techniques in thermal modelling, pp. 99-106, Elsevier,1998.
In order to select the most influential parameters of a building thermal model involving 390parameters, an exact differential screening analysis is performed and compared to a statisticaltechnique. Only 23 parameters are retained, at a cost of 136 runs for the statistical approach and ofone single run for the differential approach. For the analysed configuration, the effects are found tobe strongly influenced by the exchanged heat flows. In addition, the influential parameters (withrespect to the inner air temperature) are all related to the building components having the largestheat exchange with the air cell.
Chapitre 2
Estimation de grandeurs
dans contexte à erreurs bornées
Dans ce chapitre, je présenterai les motivations sous-jacentes à mon activité de
recherche ainsi que son positionnement méthodologique.
2.1 Motivations
L'estimation de grandeurs (paramètres physiques par exemple) par identification à
partir de données expérimentales est habituellement réalisée par la minimisation de
normes quadratiques de la différence entre des données expérimentales et les sorties
d'un modèle. Ces derniers étant généralement non-linéaires, la minimisation est
effectuée par des méthodes itératives locales (telles que la méthode de Gauss-Newton,
Levenberg-Marquardt ou gradients conjugués par exemple) alors même que ces
techniques présentent la faiblesse de fournir des résultats dépendant fortement des
choix des points initiaux. Des techniques de minimisation globales (comme les
algorithmes évolutionnaires par exemple) peuvent parfois contourner ce type d'écueils
numériques.
Néanmoins, les grandeurs identifiées doivent être assorties d'intervalles de confiance ou
d'incertitude. Dans le contexte statistique, ces derniers sont obtenus par le biais de la
borne de Cramèr-Rao, correspondant à l'inverse de la matrice d'information de Fisher.
Or, cette valeur est une borne asymptotique d'estimateur et de plus, n'a de sens que si le
modèle utilisé est valide et que les erreurs agissant sur le système sont distribuées selon
une loi de probabilité connue a priori. Malheureusement, ces conditions sont rarement
vérifiées : en effet, les modèles incluent souvent des approximations qui se traduisent
par des erreurs systématiques difficilement décrites comme des variables aléatoires et la
nature exacte des bruits agissant sur les grandeurs mesurées est souvent mal connue.
Ainsi, le contexte erreurs bornées offre-t-il une alternative séduisante au contexte
statistique. En effet, il est souvent plus naturel d'utiliser la formulation erreurs-
inconnues-mais-bornées pour traduire les informations disponibles sur les perturbations
agissant sur un système physique, comme par exemple des erreurs de mesure
systématiques ou encore des erreurs déterministes de modélisation. La seule hypothèse
formulée dans ce contexte est que le support de la fonction de distribution de probabilité
est borné, mais de borne connue a priori. Le support X de la variable incertaine x
correspond seulement au domaine des valeurs acceptables de la variable : il contient le
support de la fonction (loi) de probabilité décrivant la variable x. Dans ce contexte, la
solution, si elle existe, n’est plus ponctuelle mais prend la forme d’un ensemble de
solutions, voire de la réunion de sous-ensembles disjoints de solutions. Enfin, la forme et
le volume des ensembles solutions peuvent ensuite être interprétés en terme
d’incertitudes associées aux grandeurs estimées. En particulier, la projection des
encadrements de l'ensemble solution (sur les axes du vecteur de paramètres ou d'état)
fournit des encadrements des intervalles d'incertitudes des grandeurs identifiées.
L'approche "erreurs bornées" date de la fin des années 1960 suite aux travaux de
Schweppe [Sch68] Witsenhausen [Wit68] et Bertsekas et Rhode [BR71]. Cette
thématique de recherche est aujourd'hui bien établie. Dans la suite ce chapitre, je
présente le principe de cette approche pour l'estimation de paramètres et de l'état d'un
système.
2.2 Identification de paramètres
2.2.1 Erreurs additives sur la sortie du modèle
En supposant que les perturbations agissant sur le système physique sont additives sur
la sortie, les données expérimentales yk sont alors reliées au modèle ( )∗m
ky par une
relation de la forme
( ) ε∗ ∗= + = …, 1m
k k ky y k N (2.1)
où k désigne le numéro de l'échantillon et N, la taille de l'échantillon correspondant au
nombre d'observations. ∗ est le vrai vecteur de paramètres inconnu à estimer.
Dans le contexte de l’estimation à erreur bornée, la séquence ε ∗ est supposée bornée,
de bornes connues, sans aucune autre hypothèse a priori. Sous forme normalisée, elle
satisfait l’inégalité suivante :
ε ∗∀ = − ≤ ≤…1 , 1 1kk N (2.2)
L’hypothèse de normalisation n’est pas restrictive car il est toujours possible de se
ramener à cette forme dans le cas où les bornes d’erreur inférieure et supérieure sont
quelconques et a fortiori différentes de ±1 .
Remarque : Il est intéressant de noter qu'il n'est pas nécessaire que les réalisations ε ∗k
soient dé-corrélées ni même indépendantes entre elles.
Un vecteur de paramètres est dit acceptable, si et seulement si l’erreur entre ky et
( )m
ky est comprise entre les bornes a priori. Par conséquent, l’objectif de l’estimation
ensembliste à erreurs bornées est de calculer l’ensemble admissible a posteriori, défini
par :
( ) = ∈ ∀ = − ≤ − ≤…1 , 1 1m
k kk N y yS Q (2.3)
où ⊆ pQ est l'espace de recherche a priori du vecteur paramètres, de taille p.
Plusieurs approches ont été explorées pour encadrer l’ensemble (2.3), selon le caractère
linéaire ou non-linéaire, à temps continu ou à temps discret des modèles mis en jeu
Lorsque le modèle est linéaire, l'ensemble S est un polyèdre convexe qui peut être
caractérisé de manière exacte (voir par exemple [WP89]), mais dont la forme devient
complexe lorsque N est grand. Plusieurs approches ont alors été explorées dans la
littérature, pour encadrer ce polyèdre avec des formes plus simples telles que des
ellipsoïdes (voir [FH82], [BBC90], [MV91a,b], [VZ96], [DW01] par exemple), des pavés,
des zonotopes [ABC05] ou encore des parallélotopes [CGZ96] par exemple. La question
de la convergence de cet ensemble englobant a aussi été étudiée [Akç04], [BCT98],
[BH99]. Le lecteur trouvera dans le chapitre 3, une présentation didactique des
techniques ellipsoïdales et parallélotopiques que j'ai mises en œuvre en Robotique1 et des
commentaires sur les propriétés des ces algorithmes. Je présenterai en particulier, une
formulation numérique développée dans [LB02] qui assure la stabilité des algorithmes
récursifs ellipsoïdaux [PRV03a,b,c], [RP05], [RP06] et une méthodologie originale pour
tenir compte de la présence de données expérimentales aberrantes.
Lorsque le modèle est non-linéaire, la forme de l'ensemble S est quelconque. Nous
verrons que la détermination de cet ensemble correspond à une inversion ensembliste.
Nous utiliserons des pavages intervalles [JKDW01] (union de boites) pour effectuer cette
inversion et décrire l'ensemble solution. Le lecteur trouvera dans le chapitre 4, les
méthodes intervalles utilisées dans le cadre de ma recherche et notamment
l'arithmétique des secteurs que nous avons développée pour représenter les intervalles
complexes2 [CRRI06] [RRC+05], ainsi que les applications de ces méthodes dans le
contexte de la mesure de propriétés physiques par méthodes périodiques3 (diffusion
1 Travaux réalisés en collaboration avec M. Philippe POIGNET du LIRMM CNRS Univ-Montpellier 2.2 Ces travaux correspondent au travail de Thèse de Doctorat de Mr. Tarek RAÏSSI au CERTES EA3481 Université
Paris XII Val de Marne, [Raï04].3 Ces travaux utilisent des données expérimentales obtenues par MM. Laurent IBOS et Abderrahim BOUDENNE,
du CERTES EA3481 Université Paris XII Val de Marne.
thermique et relaxation diélectrique) [RIRC03, 04, 05] [RRIC04].
Lorsque le système est décrit par des équations différentielles ordinaires, l'évaluation de
la sortie du modèle à temps continu aux instants correspondant aux mesures doit être
réalisée sous forme ensembliste. Nous avons montré que l'intégration numérique
garantie par modèles de Taylor intervalles rendait possible cette évaluation2
[RRC03a,b,c, 04]. Il est ensuite possible d'utiliser ces résultats numériques au sein d'un
algorithme d'inversion ensembliste, tel que SIVIA [JW93a,b] par exemple. Ces travaux
seront présentés dans le chapitre 5.
2.2.2 Erreurs additives sur la sortie du modèle en présence de paramètres de
nuisance incertains
La présence d'incertitudes de modèles dans le cas linéaire a par exemple été étudiée pour
l'estimation d'état dans [CR00], [CE04], et [PNDW04]. Le cas de l'identification de
paramètres avec des modèles non-linéaire avec des facteurs expérimentaux incertains a
été étudié dans [JW99].
Dans cette partie, nous nous intéressons au cas particulier de la présence de paramètres
de nuisance avec des modèles non-linéaires : les modèles physiques, appelés aussi
phénoménologiques, de connaissances ou encore boîtes blanches, sont généralement
construits avec un grand nombre de paramètres, dont certains supposés connus, ne le
sont pas parfaitement.
En robotique, ce sont par exemples les longueurs des bras manipulateurs. Lors de la
mesure indirecte de propriétés des matériaux, c'est par exemple la taille des échantillons
ou encore les modèles traduisant les échanges avec l'environnement immédiat des bancs
d'essai : les modèles de convection, les modèles de contacts thermiques .... De manière
assez fréquente, ces paramètres supposés connus, que j'appellerai de nuisance dans la
suite, ne sont pas parfaitement connus, ils sont donc assortis d'incertitude : Dans le
meilleur des cas, les paramètres de nuisance sont mesurés ; il y a donc naturellement
une incertitude de mesure. Dans le pire des cas, ils correspondent à des grandeurs tirées
de la littérature et prennent la forme de plage de valeurs admissibles.
Une manière intuitive de prendre en compte cette méconnaissance dans la démarche
d'identification serait d'inclure dans le vecteur de paramètres à identifier, les
paramètres de nuisances, puis d'identifier directement le nouveau vecteur de
paramètres. Cette démarche rencontre en fait des difficultés de mise en œuvre et la
validité des résultats obtenus est parfois critiquable. En effet, les paramètres physiques
apparaissant dans les modèles de connaissances ne sont pas tous identifiables (du moins
pas tous simultanément), il n'y a donc pas unicité de solution. Ceci peut handicaper les
techniques d'identification par minimisation de critère et optimisation locale. On peut
parfois ajouter des contraintes sur les bornes des paramètres de nuisance ou sur le
distribution de probabilité a priori de ces derniers pour mieux tenir compte des
informations disponibles.
Par exemple, j'ai étudié ce problème dans le contexte Bayesien lors d'une étude de cas de
mesure de paramètres thermiques par identification par erreur de sortie, en présence de
paramètres de nuisance incertains. En supposant que les incertitudes affectant les
paramètres de nuisance sont indépendantes et suivent une loi de distribution de
probabilité Gaussienne, il était possible de trouver l'optimum du critère du maximum a
posteriori par un algorithme d'optimisation local [RP03]. La critique majeure que l'on
peut formuler quant à cette démarche est le choix de la loi Gaussienne pour la
distribution des incertitudes de modèles. En, effet, dans le contexte de la mesure
physique, il est plus naturel de décrire les incertitudes affectant les paramètres de
nuisances par des bornes d'erreurs connues a priori.
En présence de paramètres de nuisance νννν mal connus, l'ensemble solution (2.3) est re-
défini comme suit
( ) ( ) = ∈ × ∈S Q N Y, | ,f (2.4)
où Q et N désignent des ensembles admissibles a priori (resp.) pour les paramètres à
identifier θθθθ et de nuisance νννν et où Y désigne un ensemble admissible a priori pour les
sorties du modèle. Comme nous ne nous intéressons pas à la valeur des paramètres de
nuisance, mais plutôt à l'effet de leur incertitude sur les résultats d'identification, une
méthode simple consiste à réaliser la projection de l'ensemble S sur le sous-espace défini
par les paramètres à identifier
( ) , ,pProjΠ = ∈ ∃ ∈ ∈fS Q N Y (2.5)
Comme il est de dimension plus réduite, on peut s'attendre à ce que la mise en œuvre
informatique de cette démarche soit plus facile et la mémoire requise plus petite.
Dans le cas général non-linéaire que j'ai abordé dans le cadre de mes recherches4, nous
avons utilisé l'arithmétique d'intervalles et plus particulièrement un algorithme de
projection ensembliste développé conjointement par Mlle Braems [Bra03] et M. Jaulin
4 Ces travaux ont été effectués dans le cadre d'une collaboration avec MM. Eric WALTER et Michel KIEFFER du L2S
CNRS Supelec Université Paris Sud, Mlle Isabelle BRAEMS du LEMHE CNRS Université Paris Sud dans le cadrede sa thèse au L2S sous la direction de Mr. Eric WALTER, et avec M. Luc JAULIN de l'E3I2 ENSIETA.
[JBW02], pour caractériser l'ensemble (2.5). Le principe de cet algorithme et son
application à la mesure physique seront rappelés dans le chapitre 4. Le lecteur pourra
aussi se référer aux documents joints en annexe de ce document [BJK+03], [BRKW03] et
[BRB+05].
2.2.3 Encadrement de paramètres
Les algorithmes d'inversion et projection ensemblistes ont pour objectif de caractériser
complètement la forme de l'ensemble solution. Lorsque la dimension du vecteur de
paramètres est supérieure à 2, la représentation graphique de cet ensemble devient
délicate. On pourrait par exemple déterminer des projections sur le plan formé par deux
paramètres choisis au sein du vecteur des paramètres.
Dans le domaine de la mesure physique, la caractérisation de la forme de l'ensemble
solution n'est pas vraiment désirée, on souhaite surtout avoir une bonne évaluation de
l'intervalle d'incertitude à associer au paramètre identifié : les bornes de cet intervalle
sont fournis par les plus grande et plus petite valeur prise par les composantes du
vecteur de paramètres, c'est-à-dire qu'elles correspondent à la projection de l'ensemble
solution sur les axes définis par les paramètres.
Dans le cas de modèles linéaires par rapport aux paramètres, nous verrons dans le
chapitre 3, que les approches ellipsoïdale ou parallélotopique sont déjà assez
économiques en terme de mémoire et de complexité de mise en œuvre informatique. De
plus, nous verrons que la détermination des intervalles d'incertitudes est assez
immédiate.
Lorsque le modèle est non-linéaire, des algorithmes spécifiques doivent être mise en en
œuvre. Une solution intéressante est offerte par l'algorithme Hull développé par Mr.
Jaulin [Jau00] avec des intervalles réels. Je monterai dans le chapitre 4, comment j'ai
étendu cet algorithme aux intervalles complexes pour l'identification de paramètres
physiques avec des modèles à valeur complexe [RRCI05].
2.3 Estimation d'état
2.3.1 Modèles algébriques
Le problème de l'estimation de l'état d'un système dynamique décrit par un modèle
algébrique linéaire ou non linéaire a fait l'objet de nombreuses études. Les méthodes
sont similaires à celles mises en œuvre pour l'identification de paramètres : approches
ellipsoïdales [DWP01b], parallélotopiques [CGZ96] et zonotopes dans le cas linéaire et
arithmétique d'intervalles [JKDW01] dans le cas non-linéaire. Les applications sur des
données réelles sont diverses : on peut citer dans le cas non-linéaire la localisation de
robots mobiles [KJW02], [KJWM02] ou de véhicules [DDBC03], [BM03].
2.3.2 Modèles à temps continu
Pour des systèmes coopératifs incertains, des propriétés de monotonie permettent
d'encadrer le système incertain par des systèmes certains mettant en jeu des grandeurs
ponctuelles. C'est cette méthode qui est utilisée dans [GRH00] et [HG01] pour obtenir un
observateur intervalle.
Dans le cas général des systèmes décrits par des équations différentielles non-linéaires
quelconques, l'idée consiste à utiliser les outils d'intégration numérique garantie des
équations différentielles afin d'obtenir des évaluations numériques des grandeurs
étudiées (sortie des modèles, vecteurs d'états) aux instants correspondant à
l'observation.
Dans [Jau02], Mr. Jaulin a utilisé un encadrement au premier ordre de la solution de
l'équation différentielle pour obtenir une évaluation de l'état du système aux pas de
temps de mesure, mais en supposant qu'il n'y a pas de bruit d'état. On obtient ainsi un
observateur de type prédicteur-correcteur à un pas, tout à fait similaire à ce qui est
développé dans le contexte erreur bornée avec des modèles à temps discret (comme dans
[KJW02] par exemple). Néanmoins, cet encadrement au premier ordre est connu pour
fournir des résultats très pessimistes, ce qui rend la bissection du vecteur d'état
indispensable.
Dans le cadre de nos travaux2, nous avons apporté des amélioration techniques au
schéma proposé par M. Jaulin. En utilisant des modèles de Taylor et un pré-
conditionnement numérique des opérations matricielles, nous avons pu obtenir des
approximations numériques de l'état au pas de mesure, avec un pessimisme très faible,
ce qui a permis d'obtenir des résultats similaires à ceux obtenus dans [Jau02] sans avoir
recours à la bissection du vecteur d'état.
Ensuite, nous avons généralisé notre approche en reformulant le problème d'observation
à horizons glissants dans un contexte à erreurs bornées en utilisant la propagation de
contraintes intervalles et l'intégration numérique garantie. L'observateur développé peut
utiliser un horizon de taille quelconque et peut traiter le cas d'état initial incertain
[RRC05].
Enfin, un élément intéressant quant à nos méthodes : il n'est pas nécessaire que le pas
d'échantillonnage des données expérimentales soit constant, ni même corresponde au
pas d'intégration de l'équation différentielle.
Toutes ces notions seront détaillées dans le chapitre 5. Le lecteur pourra aussi se
reporter aux documents [RRC04] et [RRC05] joints en annexe.
2.4 Publications
2.4.1 Estimation de paramètres de modèles linéaires
[RP05a] N. Ramdani, P. Poignet, Robust dynamic experimental identification of robots with setmembership uncertainty, IEEE/ASME Transactions on Mechatronics 10(2):253-256, 2005.
Voir le chapitre 3.
[PRV03a] P. Poignet, N. Ramdani, A. Vivas, Approche ellipsoïdale factorisée pour l’estimation deparamètres dynamiques physiques de robots parallèles, APII-Journal Européen desSystèmes Automatisés 37(9):1111-1127, 2003.
Voir le chapitre 3.
[PRV03b] P. Poignet, N. Ramdani, A. Vivas, Ellipsoidal estimation of parallel robot dynamicparameters, Proceedings of IEEE/RSJ IROS 2003, pp. 3300-3305
Voir le chapitre 3.
[PRV03c] P. Poignet, N. Ramdani, A. Vivas, Robust estimation of parallel robot dynamicparameters with interval analysis, Proceedings 42th IEEE Conference on Decision andControl, CDC2003, Maui, USA, pp. 6503-6508.
Voir le chapitre 3.
[RP06] N. Ramdani, P. Poignet, Experimental parallel robot dynamic model Evaluation with setmembership estimation, 14th IFAC Symposium on System Identification 2006, soumise.
Voir le chapitre 3.
2.4.2 Estimation de paramètres de modèles non-linéaires et à variables
complexes
[CRRI06] Y. Candau, T. Raïssi, N. Ramdani, L. Ibos, Complex interval arithmetic using polar form,Reliable Computing 12(1):1–20, 2006.
Voir le chapitre 4.
[BJK+03] I.Braems, L.Jaulin, M.Keiffer, N.Ramdani, E.Walter, Reliable parameter estimation inpresence of uncertainty, 13th IFAC Symposium on System Identification, Rotterdam,SYSID2003, pp.1856-1861.
Voir le chapitre 4.
[BRKW03] I. Braems, N. Ramdani, M. Kieffer, E. Walter, Caractérisation garantie d'un dispositif demesure de grandeurs thermiques, APII-Journal Européen des Systèmes Automatisés 37(9):1129-1143, 2003.
Voir le chapitre 4.
[BRB+05] I.Braems, N.Ramdani, A.Boudenne, L.Jaulin, L.Ibos, E.Walter, Y.Candau (2005), New set-membership techniques for parameter estimation in presence of model uncertainty, 5AIInt. Conf. Inverse Problems in Engineering: Theory, Practice, July 2005, Cambridge, UK.
Voir le chapitre 4.
[RRC+05] N. Ramdani, T. Raïssi, Y. Candau, A. Boudenne, L. Ibos, Set membership parameteridentification with complex intervals using polar forms, IFAC World Congress Praha05,July 2005, acceptée.
Voir le chapitre 4.
[RIRC03] T. Raïssi, L. Ibos, N. Ramdani, Y. Candau, Analyse de spectres de relaxation diélectriquepar arithmétique d’intervalles, NUMELEC2003, Toulouse, CD-Rom 2003.
Voir chapitre 4.
[RIRC04] T.Raïssi, L.Ibos, N.Ramdani, Y.Candau Guaranteed method for the estimation ofdielectric relaxation models parameters, IEEE International Conference on Solid DielectricsICSD 2004, Toulouse.
Voir chapitre 4.
[RRIC04] T. Raïssi, N. Ramdani, L. Ibos, Y. Candau, Analyse de propriétés diélectriques dans uncontexte à erreurs bornées, CIFA 2004, Confèrence Internationale Francophone d’Automatique,Novembre 2004, Douz, Tunisie.
Voir chapitre 4.
[RIRC05] T. Raïssi, L. Ibos, N. Ramdani, Y. Candau, Analyse de spectres de relaxation diélectriquepar arithmétique d’intervalles, Revue Internationale de Génie Electrique 8(1):97-117, 2005.
Voir chapitre 4.
[RRIC05] T. Raïssi, N. Ramdani, L. Ibos, Y. Candau, A reliable method for the estimation ofdielectric relaxation models parameters, Proc. 5AI Int. Conf. Inverse Problems inEngineering: Theory, Practice, July 2005, Cambridge, UK, 2005
Voir chapitre 4.
2.4.3 Estimation de paramètres et d'états de modèles à temps continu
[RRC04] T. Raïssi, N. Ramdani, Y. Candau, Set membership state and parameter estimation forsystems described by nonlinear differential equations, Automatica 40(10):1771-1777, 2004.
Voir chapitre 5.
[RRC05] T. Raïssi, N. Ramdani, Y. Candau, Bounded-error moving horizon state estimator fornon-linear continuous-time systems : application to a bioprocess system, Journal of ControlProcess 15(5):537-545, 2005.
Voir chapitre 5.
[RRC03a] T. Raïssi, N. Ramdani, Y. Candau, Guaranteed state estimation for nonlinear continuoustime systems with taylor models, 13th IFAC Symposium on System Identification,SYSID2003, Rotterdam, pp.1725-1730.
Voir chapitre 5.
[RRC03b] T. Raïssi, N. Ramdani, Y. Candau, Parameter estimation for nonlinear continuous-timesystems in a bounded error context, Proceedings 42th IEEE Conference on Decision andControl, CDC2003, Maui, USA, pp.2240-2245.
Voir chapitre 5.
[RRC03c] T. Raïssi, N. Ramdani, Y. Candau, Estimation d’etat pour des systemes decrits par desequations differentielles non-lineaires dans un contexte à erreurs bornées, actes desJDA2003, pp.341-346.
Voir chapitre 5.
[RRC06] T. Raïssi, N. Ramdani, Y. Candau, Robust nonlinear continuous-time state estimationusing interval taylor models, 5th IFAC Symposium on Robust Control Design, soumise.
Voir chapitre 5.
Chapitre 3Méthodes ensemblistespour modèles linéaires ;Application en robotique.Dans ce chapitre, j'aborde la question de l'identification de paramètres dans un contexte
à erreurs bornées pour le cas des modèles linéaires.
3.1 Motivations
Lorsque le modèle est linéaire par rapport au vecteur des paramètres, on peut écrire
ε∗ ∗
= + = …, 1T
k k ky k Nd θ (3.1)
L'ensemble solution recherché s'écrit
∗
= ∈ ∀ = − ≤ − ≤ℝ …1 , 1 1p T
k kk N yθ d θS (3.2)
c'est un polyèdre convexe qui peut être caractérisé de manière exacte (voir par exemple
[WP89]), mais dont la forme devient complexe lorsque N est grand. Plusieurs approches
ont été explorées dans la littérature, pour encadrer ce polyèdre avec des formes plus
simples telles que des ellipsoïdes, des pavés ou encore des parallélotopes par exemple.
Dans ce chapitre, je détaillerai deux familles d'algorithmes utilisés dans le cadre de mes
travaux de recherche, puis illustrerai leurs avantages dans le cadre d'applications en
robotique.
3.2 Estimation ellipsoïdale de paramètres
Les algorithmes d’estimation ellipsoïdale ont pour objectif d’englober le polyèdre des
paramètres admissibles dans un ellipsoïde [FH82], [BBC90], [MV91a,b], [VZ96],
[MNPW96], [DW01]. Un des avantages de l’ellipsoïde est qu’il est décrit de façon simple
par un vecteur spécifiant son centre et par une matrice définie positive qui précise sa
taille et son orientation. Après le traitement des −1k premières observations,
l’ellipsoïde 1k−
E réalisant l’approximation extérieure de l’ensemble admissible a

24 Chapitre 3
posteriori compatible avec les observations est caractérisé par :
( ) ( ) 2 1 2
1 1 1 1 1 1 1 1
ˆ ˆ ˆ( , , )T
p
k k k k k k k kσ σ
−
− − − − − − − −
= ∈ − − ≤θ P θ θ θ P θ θE ℝ (3.3)
ou encore sous une forme équivalente simplifiée
( ) ( ) 1 1 1 1 1 1
ˆ ˆ ˆ( , ) 1T
p
k k k k k k− − − − − −
= ∈ − − ≤θ M θ θ θ M θ θE ℝ (3.4)
où −1
ˆ
kθ est le centre de l’ellipsoïde et ( )σ
−
− − −
≜1
2
1 1 1k k kM P est une matrice définie positive
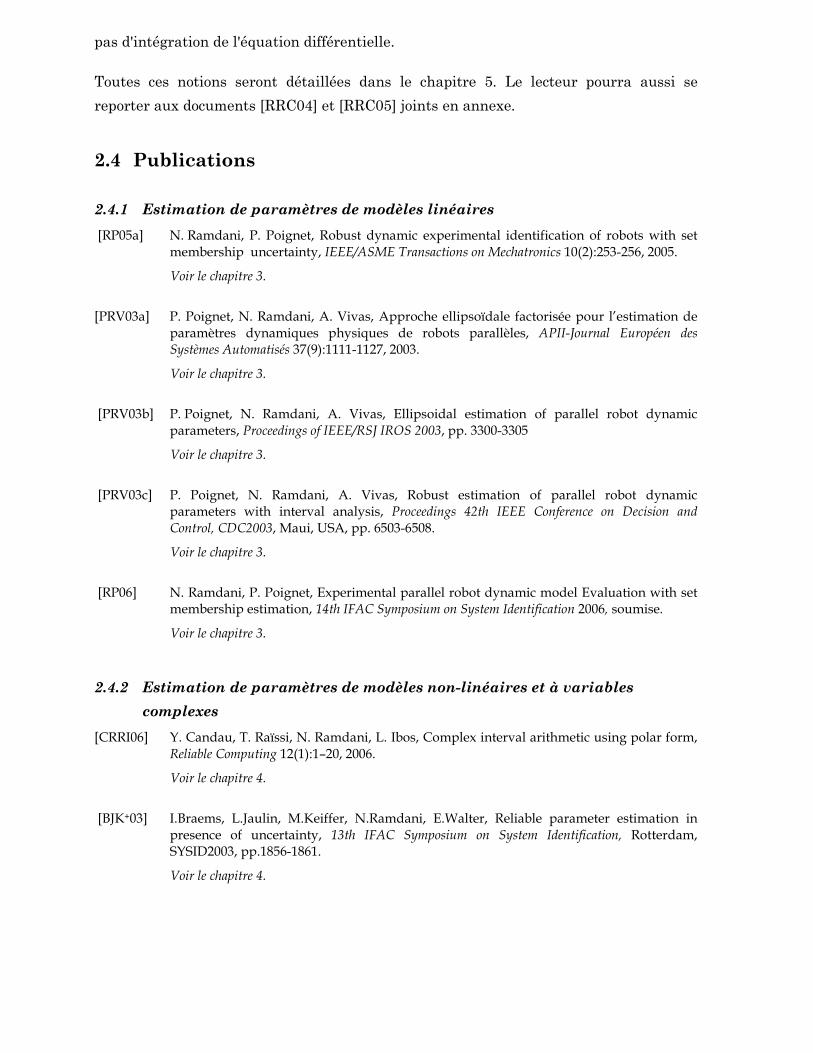
qui spécifie la forme et l’orientation de l’ellipsoïde. Etant donnée la nouvelle observation
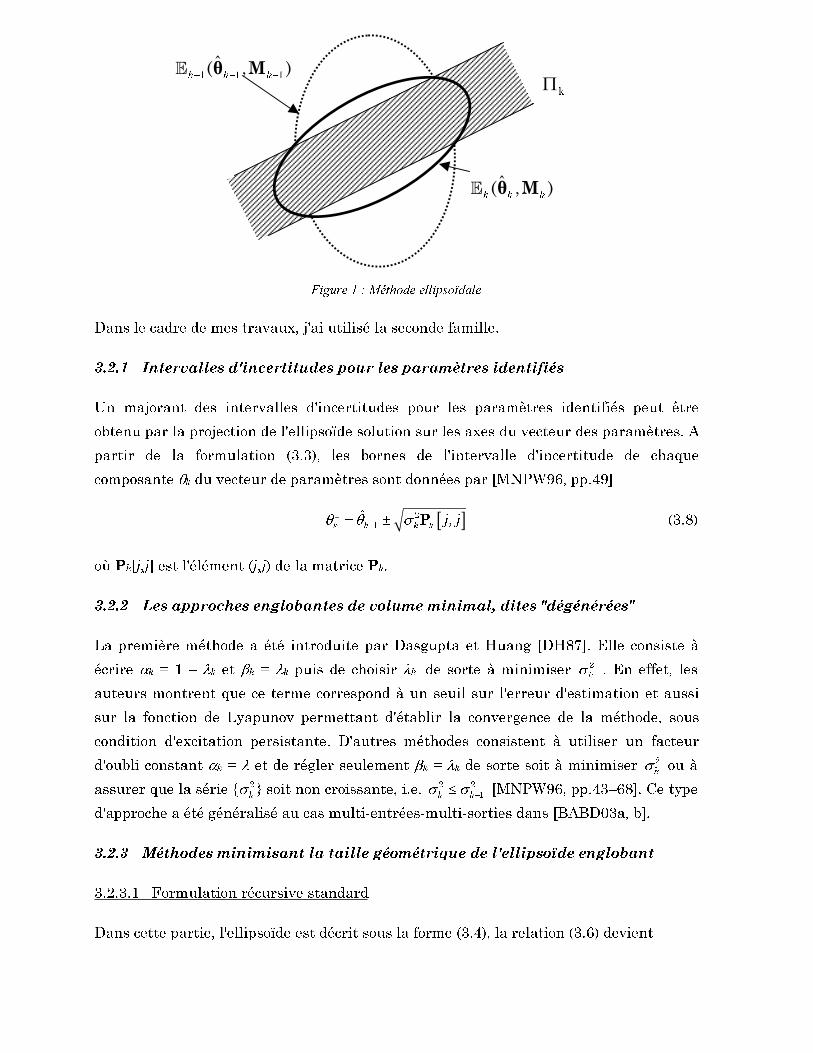
à l’instant k, l’ellipsoïde ˆ( , )k k kθ ME qui englobe l’intersection de l’ellipsoïde
1 1 1
ˆ( , )k k k− − −
θ ME et la bande de contrainte
Π = ∈ − ≤ − ≤ℝT
1 1p
k k kyθ d θ (3.5)
définie par la nouvelle donnée expérimentale, satisfait la relation suivante
2 2
1 1 1 1
ˆ ˆ( , , ) ( , , )k k k k k k k k k
σ σ− − − −
⊇ ∩Πθ P θ PE E (3.6)
et qui peut être écrite de façon équivalente sous la forme de l’inégalité suivante (voir
aussi la figure 1) :
( )2ˆ , ,k k k k
σ∈ ⇒θ θ PE
] ] [ ] ( ) ( )α β α β α σ β−
− − − −
∀ ∈ ∀ ∈ − − + − ≤ +2
1 2
1 1 1 1
ˆ ˆ0,1 , 0,1 , T
T
k k k k k k k k k k k kyθ θ P θ θ d θ (3.7)
Remarque : On notera que dans la relation (3.7), le coefficient αk apparaît comme un
facteur d'oubli permettant de pondérer l'information "passée" alors que βk est un facteur
qui pondère l'information "nouvelle".
Les nouvelles valeurs de ˆ
kθ ,
kP et σ
2
k sont obtenues de manière récursive à partir de
leurs valeurs respectives à l'indice k–1 mais aussi en fonction des coefficients αk et βk. En
fait, on trouve dans la littérature deux familles de méthodes pour choisir des valeurs
optimales pour les coefficients αk et βk.
(i) Les méthodes de volume minimal, dites "dégénérées" : les coefficients αk et βk sont
choisis de sorte à assurer une réduction, mais non optimale, de la taille
géométrique de l'ellipsoïde.
(ii) Les méthodes minimisant la taille géométrique de l'ellipsoïde englobant : les
coefficients αk et βk sont calculés de sorte à minimiser le volume ou la somme
quadratique des demi-axes de l'ellipsoïde Ek, mais de manière optimale.
Méthodes ensemblistes pour modèles linéaires 25
Figure 1 : Méthode ellipsoïdale
Dans le cadre de mes travaux, j'ai utilisé la seconde famille.
3.2.1 Intervalles d'incertitudes pour les paramètres identifiés
Un majorant des intervalles d'incertitudes pour les paramètres identifiés peut être
obtenu par la projection de l'ellipsoïde solution sur les axes du vecteur des paramètres. A
partir de la formulation (3.3), les bornes de l'intervalle d'incertitude de chaque
composante θk du vecteur de paramètres sont données par [MNPW96, pp.49]
[ ]θ θ σ±
−= ±
2
1ˆ ,
k k k kj jP (3.8)
où Pk[j,j] est l'élément (j,j) de la matrice Pk.
3.2.2 Les approches englobantes de volume minimal, dites "dégénérées"
La première méthode a été introduite par Dasgupta et Huang [DH87]. Elle consiste à
écrire αk = 1 – λk et βk = λk puis de choisir λk de sorte à minimiser σ 2
k . En effet, les
auteurs montrent que ce terme correspond à un seuil sur l'erreur d'estimation et aussi
sur la fonction de Lyapunov permettant d'établir la convergence de la méthode, sous
condition d'excitation persistante. D'autres méthodes consistent à utiliser un facteur
d'oubli constant αk = λ et de régler seulement βk = λk de sorte soit à minimiser σ2
k ou à
assurer que la série σ2
k soit non croissante, i.e. σ σ
−
≤2 2
1k k [MNPW96, pp.43–68]. Ce type
d'approche a été généralisé au cas multi-entrées-multi-sorties dans [BABD03a, b].
3.2.3 Méthodes minimisant la taille géométrique de l'ellipsoïde englobant
3.2.3.1 Formulation récursive standard
Dans cette partie, l'ellipsoïde est décrit sous la forme (3.4), la relation (3.6) devient
1 1 1
ˆ( , )k k k− − −
θ ME
ˆ( , )k k kθ ME
kΠ

26 Chapitre 3
1 1 1
ˆ ˆ( , ) ( , )k k k k k k k− − −
⊇ ∩Πθ M θ ME E (3.9)
ce qui donne pour la relation (3.7), la formulation suivante
( )ˆ ,k k k
∈ ⇒θ θ ME ] ] ( ) ( ) ( )α α α− − −
∀ ∈ − − + − − ≤2
1 1 1
ˆ ˆ0,1 , 1 1T
T
k k k k kyθ θ M θ θ d θ (3.10)
Sous cette forme, la famille d’ellipsoïdes k
E est paramétrée par le seul coefficient α ,
dont la valeur optimale α est choisie de manière à minimiser la taille de l’ellipsoïde.
Pour évaluer cette taille, deux types de critère sont utilisés. Le premier minimise le
déterminant de −1
kM ce qui revient à minimiser le volume de l’ellipsoïde. Ce critère peut
conduire à des ellipsoïdes très allongés, de faible volume mais correspondant à des
incertitudes très grandes pour certains paramètres. On peut alors préférer utiliser le
critère minimisant la trace de −1
kM , ce qui représente la somme des carrés des demi–
longueurs des axes du nouvel ellipsoïde k
E . Ce dernier fournit alors des ellipsoïdes
mieux conditionnés [DW01].
On doit à Fogel et Huang [FH82] les deux premiers algorithmes fournissant une solution
explicite au problème de la détermination de ces ellipsoïdes au sens de ces deux critères ;
les auteurs utilisèrent une famille paramétrée d'ellipsoïdes introduite par Schweppe
[Sch68]. La solution obtenue était néanmoins sous-optimale et de meilleurs résultats
peuvent être obtenus en effectuant au préalable une réduction de la bande de contrainte,
c’est-à-dire en procédant, chaque fois que l’un des hyperplans définissant la bande Πk ne
coupe pas l’ellipsoïde courant, à une translation de cet hyperplan parallèlement à lui-
même jusqu’à ce qu’il devienne tangent à l’ellipsoïde courant. Cette démarche ne change
évidemment pas le résultat de l’intersection mais présente deux avantages majeurs.
D’une part, l’algorithme du volume minimal devient mathématiquement équivalent à un
algorithme récursivement optimal développé en programmation linéaire. D’autre part, la
réduction de bande rend l’algorithme de la trace minimale aussi simple à mettre en
œuvre que celui du déterminant. Le lecteur trouvera les démonstrations, le détail
complet des calculs et une solution explicite pour le calcul de α dans les deux cas dans
[WP97], [DW01] et [DWP01].
3.2.3.2 Formulation factorisée pour assurer la stabilité numérique
Le meilleur ellipsoïde donnant une approximation extérieure de l’ensemble des
paramètres a posteriori peut être obtenu par l'algorithme récursif que l'on peut écrire de
la manière suivante [Sed98] [DW00]:
Méthodes ensemblistes pour modèles linéaires 27
( )( )( )
( )( )
α α
α α
δ α α
δ
−
−
− −
− − −
= + − = + −
= + − −
= −
1
1
1 1
2
1 1 1
ˆ ˆ1
ˆ ˆ
ˆ ˆ1
ˆ ˆ ˆ ˆˆ
ˆ ˆ1
ˆ
1
T
k k k
k k k k k
T T
k k k k k k
k
y
N M d d
θ N M θ d y
θ M θ θ Nθ
M N
(3.11)
En théorie on doit avoir δ≤ <ˆ
0 1 et > 0k
M , ce que ne peut garantir la formulation
standard des équations (3.11) [LB02]. Cette dernière est potentiellement numériquement
instable parce qu’elle est fondée sur l’utilisation des équations normales des moindres
carrés. Cette instabilité est essentiellement due à la présence du signe moins dans le
calcul de δˆ qui ne permet pas de garantir sa non-négativité. Si un tel cas se produisait,
on verrait la taille de l’ellipsoïde croître, la matrice k
M pouvant devenir non définie
positive. Une formulation factorisée a été proposée dans [LB02] pour contourner ces
difficultés. L’idée principale est de considérer la détermination de l’ellipsoïde ˆ( , )k k kθ ME
comme un problème d’optimisation :
( ) = ˆ argmin f
θ
θ θ (3.12)
où la fonction de coût est donnée par :
( ) ( ) ( ) ( )α α− − −
= − − + − −
2
1 1 12
ˆ ˆ
ˆ ˆ1
TT
k k k k kf yθ d θ θ θ M θ θ (3.13)
En introduisant les vecteurs suivants :
α
α
α
− − − −
− −
=
=
= −
= −
ɶ ɶ ɶ
ɶ
1 1 1 1
1 1
,
ˆ ,
ˆ1 ,
ˆ1
T
k k k k
k k
k
k
tq
v
w y
X M X X
X X
d
(3.14)
où −1k
X représente la factorisation de Cholesky de α−1
ˆ
kM , la fonctionnelle (3.13) peut
être écrite de façon équivalente :
( ) −
− −
− − −
= − + − = −
2
221 1 1
1 1 12 2
2
ˆ
ˆkT k k
k k k Tf v w
v w
X X θθ θ X θ X θ θ (3.15)
L’équation (3.15) a la forme d’un coût classique pour la méthode des moindres carrés. La
résolution est faite au travers d’une factorisation orthogonale. Le nouvel algorithme dans
sa forme factorisée peut alors en être déduit pour la mise à jour récursive de
l’approximation ellipsoïdale extérieure. On montre que la formulation (3.11) est
équivalente à [LB02]:

28 Chapitre 3
τ
τ
− − −
=
=
=
= −ɶ
1 1 1
2
ˆ
:0
ˆ ˆ :
1
k k k
T
k k
k
construirev w
calculer une forme triangulaire
de par factorisation orthogonale
calculer en résolvant le système triangulaire
calculer
X X θW
U uW QW
θ Uθ u
X U
(3.16)
Cet algorithme est numériquement stable et rend également les calculs plus simples
dans la mesure où les déterminations du centre ˆk
θ et de la matrice k
M sont réalisées de
façon indépendante, ce qui n'était pas le cas de la formulation (3.11). Notons qu'une
version factorisée de l'algorithme faisant intervenir la matrice −
=
1
k kP M est également
fournie dans [LB02].
Remarque : Nous verrons que lorsque nous avons mis en œuvre l'estimation ellipsoïdale
sur des données issues de robots manipulateurs, ce n'est que grâce à l'utilisation de la
formulation factorisée que nous avons pu obtenir des résultats satisfaisants [RP05],
[RP06], [PRV03b, c].
3.3 Estimation parallélotopique
Une alternative intéressante au filtrage ellipsoïdal est fournie par les approximations
parallélotopiques ; elles cherchent à encadrer l'ensemble solution par un parallélotope de
taille minimale. L'idée principale consiste à déterminer un polytope convexe encadrant
l'ensemble solution. Tout polytope satisfaisant cette condition, peut être caractérisé par
l'intersection de m bandes de contraintes réduites. Une bande de contraintes est dite
réduite si les hyperplans qui la constituent sont tangents au polyèdre solution. Lorsque
le nombre m de bandes utilisées est égale au nombre de paramètres p, le polytope est un
parallélotope P qui satisfait la propriété
1
p
j
j=
= ΠP ∩ (3.17)
où chaque bande jΠ est définie par (3.5). Le parallélotope P peut être décrit par
( )∞
= = + ≤ ≡ɶ ɶ, 1 ,
c cθ θ θ Tθ θ T θP P (3.18)
où le centre du parallélotope est défini par = ∈ … ℝ1, ,
Tp
c py yθ T et la forme du
parallélotope est définie par la matrice de transformation −
=
1T P . La matrice P est
définie par
Méthodes ensemblistes pour modèles linéaires 29
× = ∈ … ℝ1, ,
Tp p
pP d d (3.19)
Elle est inversible si le parallélotope est borné. Soient ti, i=1…p, les colonnes de T, les
2psommets de P peuvent être exprimés par les relations suivantes
α α
=
= + ∈ − =∑ …, ,
1
, 1,1 , 1, ,2p
p
l c l j j l j
j
lν θ t (15)
et le volume du parallélotope est donné par
( ) ( )= 2 detp
vol TP (16)
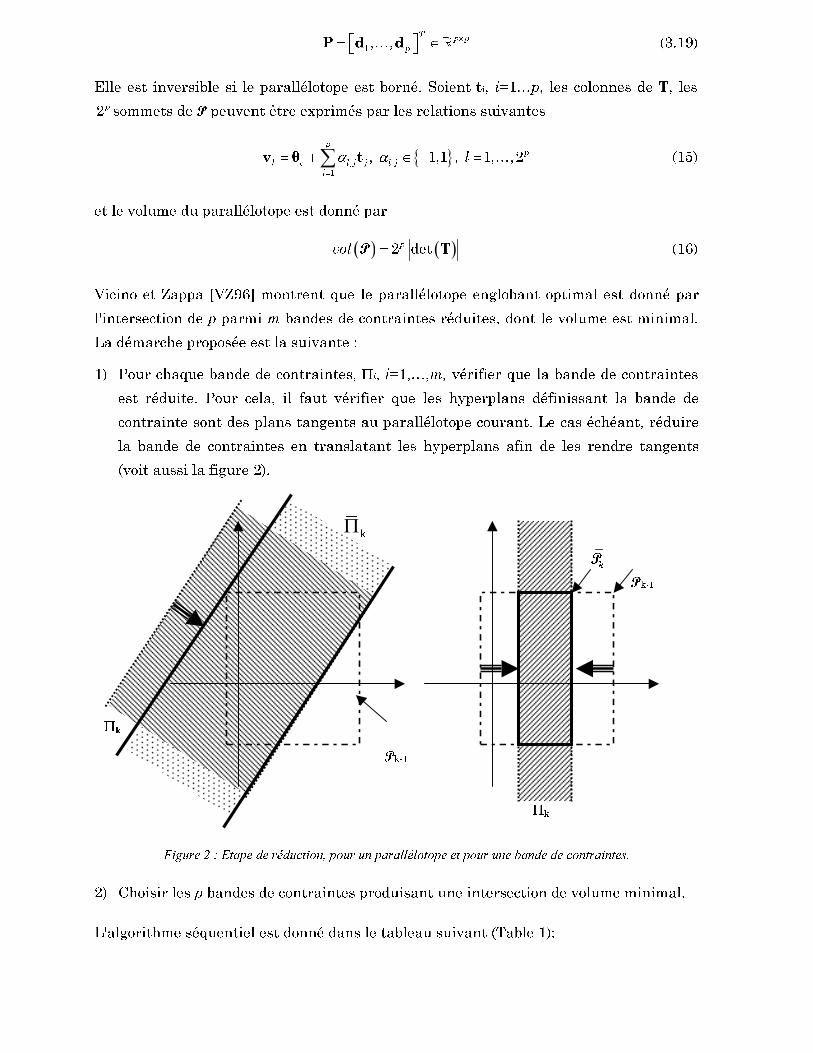
Vicino et Zappa [VZ96] montrent que le parallélotope englobant optimal est donné par
l'intersection de p parmi m bandes de contraintes réduites, dont le volume est minimal.
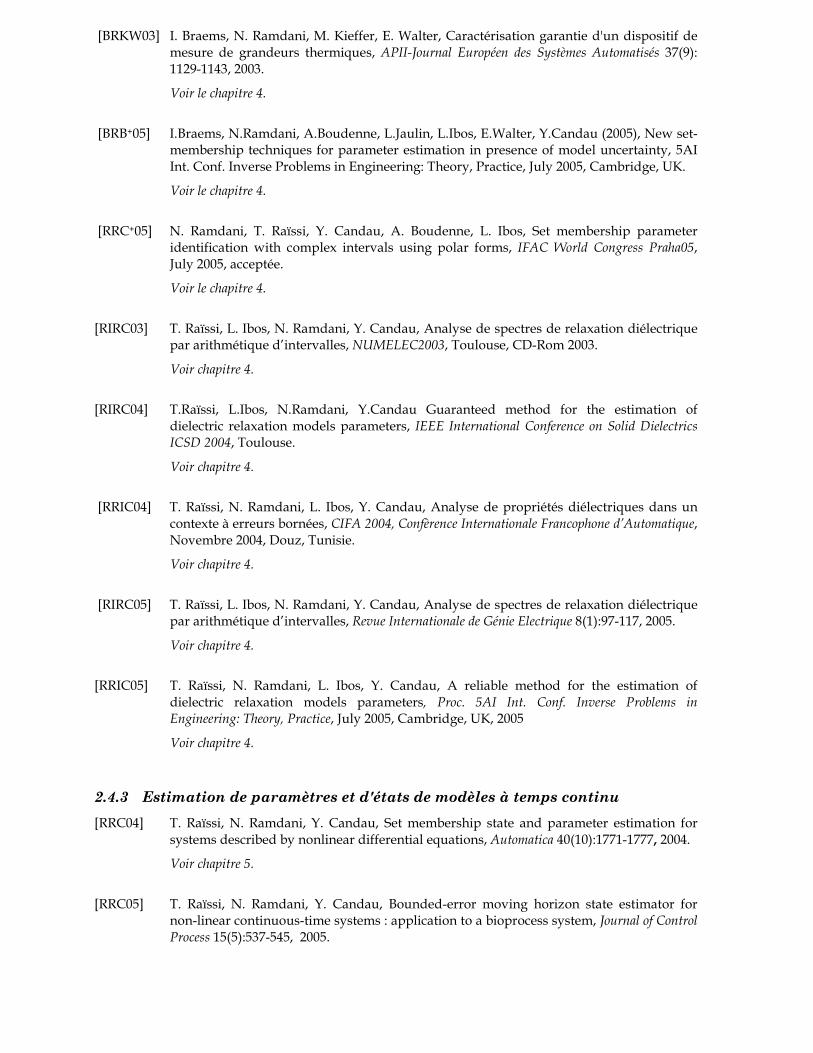
La démarche proposée est la suivante :
1) Pour chaque bande de contraintes, Πi, i=1,…,m, vérifier que la bande de contraintes
est réduite. Pour cela, il faut vérifier que les hyperplans définissant la bande de
contrainte sont des plans tangents au parallélotope courant. Le cas échéant, réduire
la bande de contraintes en translatant les hyperplans afin de les rendre tangents
(voit aussi la figure 2).
Figure 2 : Etape de réduction, pour un parallélotope et pour une bande de contraintes.
2) Choisir les p bandes de contraintes produisant une intersection de volume minimal.
L'algorithme séquentiel est donné dans le tableau suivant (Table 1):
Pk-1
Πk
Pk-1
Πk
kP
kΠ

30 Chapitre 3
TABLE 1 : APPROXIMATION PARALLELOTOPIQUE SEQUENTIELLE [VZ96]
Initialisation : =0
ˆ
0θ , µ
=
1
0 pT I , µ : petit
Récurrence : for = …1k N ,
( )− − −1 1 1
ˆ,k k k
T θP : parallélotope
( ) Π = − ≤ − ≤, 1 1T
k k k k ky yR θ R θ : nouvelle bande de contrainte
−1,k it : ie colonne de la matrice
−1kT .
pour = …1i p , si ( )−
<1,
0T
k k iR t alors
− −
= −1, 1,k i k i
t t
( )δ+
− −
=
= − +∑0 1 1,
1
ˆ
p
T T
k k k k k i
i
yR θ R t ,
( )δ−
− −
=
= − −∑0 1 1,
1
ˆ
p
T T
k k k k k i
i
yR θ R t
Si ( ) ( )( )δ δ+ −
< − >0 0
1 1ou alors ensemble solution vide: P φ−
∩Π =1k k
sinon ( )δ+ +
=0 0
min 1,r , ( )δ− −
= −0 0
min 1,r ,
pour = …1i p ,
si ( )−
=1,
0T
k k iR t alors
+
=1ir ,
−
=1ir
sinon
δ−
+
−
−= −
0
1,
1min 1 , 1
i T
k k i
r
R t,
δ+
−
−
+= −
0
1,
1min 1 , 1
i T
k k i
r
R t
( ),k k kT θP :
+ −
−
+
=0 0
, 1,
2k i k i
r r
t t ,
+ −
− −
=
−
= +∑1 1,
1
ˆ
2
p
i ik k k i
i
r r
θ θ t
( )Π R ,k k k
y :+ −
=
+0 0
2
k kr r
R R ,
+ −
+ −
−= +
+
0 0
0 0
2
2k k
r r
y y
r r
=,0 2
k
k
k
Rt
R
,
( ) ∗
=
= ,0,
arg maxT
k k ii p
i R t
si ( )∗
= 0i alors ∗
=k
T T , ∗
=k
θ θ
sinon pour = …1i p
si ( )∗≠i i alors ∗
= −
,
, *
*
T
k k i
i i k iT
k i
R tt t t
R t
sinon∗
=* *
*
1
i iT
k i
t tR t
( )∗
= + −*
*
1 T
k i k k kT
k i
yθ θ t R θR t
( ) ( )∗ ∗ ∗
=
ˆ, ,k k kT θ T θP P
k ← k + 1

Méthodes ensemblistes pour modèles linéaires 31
3.4 Convergence et taille de l'ensemble solution dans uncontexte statistique
La question de la convergence des encadrements extérieurs de l'ensemble solution dans
le contexte "erreur bornée" pour des modèles linéaires a été abordée dans la littérature,
dans un contexte statistique, c'est-à-dire selon des hypothèses sur la fonction de
distribution (probabilité) des erreurs additives et sous l'hypothèse d'excitation
persistante, mais avec un regresseur déterministe.
Dans cette partie, l'ensemble solution (3.2) est ré-écrit en introduisant la borne e sur les
erreurs additives, soit
∗
= ∈ ∀ = − ≤ − ≤e eℝ …1 ,p T
k kk N yθ d θS (3.20)
Définition 1, Excitation persistante : Le regresseur T
kd constitue une excitation
persistante, si
α β α β
+
=
∀ ∃ > > > ≤ ≤∑00
2 2
0, 0, 0, 0
i m
T
k k
k i
i m I d d I (3.21)
Définition 2, Borne d'erreur réduite (tight) : La borne d'erreur a priori e est réduite
(tight) si pour tout nombre ρ > 0 petit, on a pour tout k
( ) ( )
ε ρ ξ ρ
ρ ε ξ ρ
− ≤ ≤ − + ≥ >
≤ ≤ ≥ >
0
0
k
k
Prob
Prob
e e
e- e
(3.22)
Remarque : Lorsque la borne d'erreur est réduite, la vrai séquence de perturbations
additives atteint fréquemment les bornes. En d'autres termes, les erreurs atteignent très
fréquemment les valeurs maximales et minimales fixées a priori.
Les propriétés de convergence établies pour les ensembles englobant peuvent être
résumées comme suit [Akç04], [BCT98], [BH99] :
• Il est bien connu que dans un cas assez général, le vrai ensemble solution (3.20)
converge vers un point lorsque N → ∞. De plus cette convergence a lieu avec une
probabilité 1 si les perturbations sont une séquence de variables aléatoires réduites.
• Les algorithmes englobant séquentiels introduisent un conservatisme: la convergence
de l'ensemble solution ne garantie pas la convergence des ellipsoïdes ou
parallélotopes englobant.
• Si l'excitation est persistante, si les perturbations additives (bruit sur la sortie) sont
32 Chapitre 3
des réalisations de variables aléatoires, si la borne d'erreur est réduite (tight) et si
l'ellipsoïde de départ contient le vecteur paramètres vrai, alors l'ellipsoïde englobant
converge vers un point (le vecteur paramètres vrai) avec une probabilité 1, lorsque
N → ∞.
• Dans les mêmes conditions que précédemment, rien ne peut être dit quant à la
convergence asymptotique du parallélotope englobant [BH99]. Ce résultat est assez
surprenant car il a été souvent observé que le volume des parallélotopes englobant
est plus petit que celui des ellipsoïdes englobant [VC96]. Néanmoins, en présence de
peu de données expérimentales (N petit), la méthode parallélotopique peut présenter
de meilleures performances.
• Lorsque les erreurs additives sur la sortie du modèle sont la réalisation de grandeurs
aléatoires indépendantes identiquement distribuées, si l'excitation est persistante et
si les bornes réduites, la convergence du vrai ensemble solution dépend de la vrai
fonction de distribution des perturbations agissant sur la sortie du modèle : si les
erreurs sont distribuées majoritairement près des bornes avec une probabilité non
nulle, le diamètre de l'ensemble solution converge vers zéro en O(N–2) ; dans le cas
contraire, si les erreurs atteignent rarement les bornes, le diamètre converge plus
lentement, moins vite qu'en O(N–1) (voir [Akç04] pour la référence la plus récente sur
ce sujet).
3.5 Mise en œuvre expérimentale : Identification desparamètres dynamiques de robots manipulateurs
Dans le cadre de mes travaux de recherche1, j’ai utilisé les méthodes ellipsoïdales et
parallélotopiques pour identifier les paramètres dynamiques de robots séries2 [RP05a] et
parallèles3 [PRV03a, 03b, 03c] [RP06] dans un contexte à erreurs bornées.
Pour plus de détails, le lecteur pourra aussi se référer aux articles joints en annexe :
[RP05, Robust dynamic experimental identification of robots with set membership
uncertainty] et [PRV03a, Approche ellipsoïdale factorisée pour l’estimation de paramètres
dynamiques physiques de robots parallèles].
1 Ces travaux sont effectués, depuis janvier 2002, en collaboration avec Mr Philippe Poignet du LIRMM-CNRS-
Université Montpellier II.
2 Le robot utilisé est le SCARA de l'IRCCYN-CNRS-Univ. Nantes.3 Le robot utilisé est le H4 du LIRMM-CNRS-Université Montpellier II.
Méthodes ensemblistes pour modèles linéaires 33
3.5.1 Motivations
La réalisation d'opérations rapides de prise et dépose ou de mouvements précis pour des
tâches d’usinage peut être obtenue à l'aide de robots à structures parallèles commandés
par des contrôleurs robustes. Pour ces structures, la synthèse de commandes robustes
passe par l’utilisation de modèles physiques non linéaires caractérisant de façon précise
la dynamique du système. Le robot est modélisé avec les équations de Lagrange qui
conduisent à un modèle dynamique inverse linéaire par rapport aux paramètres
dynamiques à identifier. Il est d’usage, dans ce contexte robotique, d’utiliser des
approches de type maximum de vraisemblance pour estimer les paramètres de ces
modèles.
Dans ce cadre, les hypothèses formulées quant à la distribution aléatoire des
perturbations affectant les mesures permettent une évaluation d’ensembles de confiance
pour les paramètres identifiés. Or ces résultats, calculés à l’aide de la matrice
d’information de Fisher, sont critiquables lorsque la nature probabiliste des erreurs de
mesure peut être remise en cause ou en présence d’erreurs de modélisation ou d’erreurs
structurelles qui sont généralement de nature déterministe en robotique. En effet les
modèles retenus pour les frottements par exemple, réalisent une simplification
importante de la réalité, notamment pour des faibles vitesses articulaires. De plus, les
jeux dans les mécanismes ne sont pas modélisés ; cette erreur de modélisation ne saurait
être représentée de manière fiable par des grandeurs aléatoires. Ainsi une alternative
aux approches de type maximum de vraisemblance pour l’estimation garantie des
paramètres physiques du modèle dynamique des robots peut être proposée au travers de
méthodes ensemblistes dans un contexte à erreurs bornées.
3.5.2 Contributions
Nous avons réalisé l’estimation dans un contexte à erreurs bornées, comme une
alternative robuste au contexte probabiliste. L’erreur est prise additive sur l'entrée du
système (le couple moteur) et est supposée bornée, de borne connue. Dans un premier
temps, nous avons traité le cas d'un manipulateur série (le robot SCARA de l'IRCCYN)
[RP05] pour évaluer les algorithmes puis le cas du robot parallèle H4 du LIRMM
(illustré à la figure 3) [PRV03a,b], [RP06]. Nous avons évalué deux approches
ellipsoïdales, l’une utilisant le critère déterminant et l’autre le critère trace, ainsi que le
filtrage parallélotopique pour identifier les paramètres dynamiques des robots.
3.5.2.1 Contributions quant à la mise en œuvre expérimentale
Dans un premier temps, nous avons proposé une méthode reproductible pour choisir
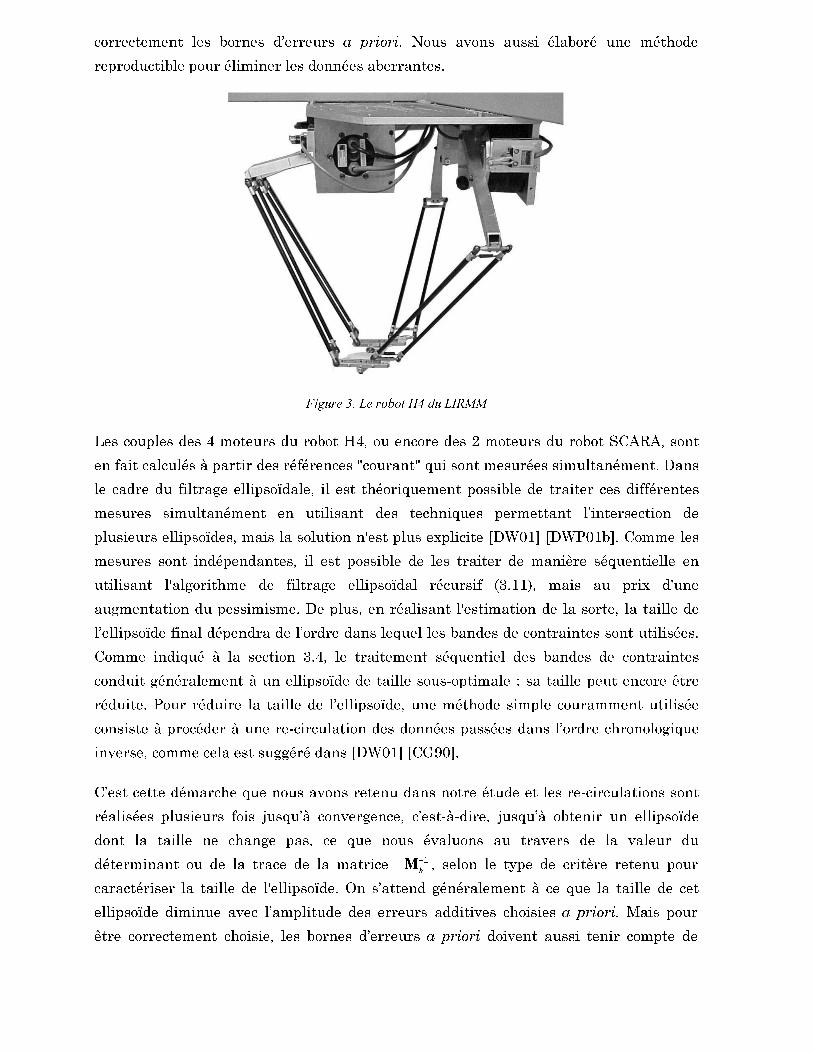
34 Chapitre 3
correctement les bornes d’erreurs a priori. Nous avons aussi élaboré une méthode
reproductible pour éliminer les données aberrantes.
Figure 3. Le robot H4 du LIRMM
Les couples des 4 moteurs du robot H4, ou encore des 2 moteurs du robot SCARA, sont
en fait calculés à partir des références "courant" qui sont mesurées simultanément. Dans
le cadre du filtrage ellipsoïdale, il est théoriquement possible de traiter ces différentes
mesures simultanément en utilisant des techniques permettant l’intersection de
plusieurs ellipsoïdes, mais la solution n'est plus explicite [DW01] [DWP01b]. Comme les
mesures sont indépendantes, il est possible de les traiter de manière séquentielle en
utilisant l'algorithme de filtrage ellipsoïdal récursif (3.11), mais au prix d'une
augmentation du pessimisme. De plus, en réalisant l'estimation de la sorte, la taille de
l’ellipsoïde final dépendra de l’ordre dans lequel les bandes de contraintes sont utilisées.
Comme indiqué à la section 3.4, le traitement séquentiel des bandes de contraintes
conduit généralement à un ellipsoïde de taille sous-optimale : sa taille peut encore être
réduite. Pour réduire la taille de l’ellipsoïde, une méthode simple couramment utilisée
consiste à procéder à une re-circulation des données passées dans l’ordre chronologique
inverse, comme cela est suggéré dans [DW01] [CG90].
C’est cette démarche que nous avons retenu dans notre étude et les re-circulations sont
réalisées plusieurs fois jusqu’à convergence, c’est-à-dire, jusqu’à obtenir un ellipsoïde
dont la taille ne change pas, ce que nous évaluons au travers de la valeur du
déterminant ou de la trace de la matrice −1
kM , selon le type de critère retenu pour
caractériser la taille de l'ellipsoïde. On s’attend généralement à ce que la taille de cet
ellipsoïde diminue avec l’amplitude des erreurs additives choisies a priori. Mais pour
être correctement choisie, les bornes d’erreurs a priori doivent aussi tenir compte de
Méthodes ensemblistes pour modèles linéaires 35
l’erreur de modèle, notamment pour des systèmes mécaniques pour lesquels les jeux et
les frottements dans les articulations sont des phénomènes fortement non-linéaires et
surtout très mal modélisés. Par conséquent, le seul choix correct des bornes d’erreurs a
priori n’est généralement pas suffisant pour traiter des cas réels de ce type : il faut
également tenir compte de données aberrantes. En effet, il peut arriver que l’intersection
entre une bande de contrainte et l’ellipsoïde courant soit vide. Dans ce cas, plusieurs
conclusions sont possibles. On peut tout d’abord conclure qu’il n’existe pas de solution, la
structure du modèle devant être modifiée. On peut ensuite prétendre que les bornes
d’erreurs choisies a priori sont trop petites et procéder à une augmentation de cette
dernière. Enfin on peut plus simplement considérer qu’il s’agit là d’une donnée aberrante
et éliminer cette dernière du jeu de données expérimentales (c'est cette démarche qui est
retenue par exemple dans [MC98]). Ainsi, la présence de données aberrantes est
inévitable dans le cadre de notre étude avec données réelles et mettant en œuvre des
systèmes électromécaniques. Aussi, nous traiterons le problème de l’estimation à erreur
bornée en acceptant la présence de données aberrantes mais dont le nombre ne dépasse
pas un seuil choisi préalablement à l'estimation. Ce seuil a été fixé à 1% du nombre total
d’échantillons dans l'étude mettant en jeu des données issues du robot H4 [PRV03a] et
[RP06] et 2% pour le robot SCARA [RP05].
La démarche retenue pour détecter les données aberrantes est la suivante. Dans un
premier temps, nous choisissons les bornes d’erreurs a priori sur la base de
considérations physiques. Ces bornes d'erreurs a priori sont ensuite ajustées en fonction
de performances expérimentales constatées comme suggéré dans [DW01]. Ensuite, nous
procédons à la détection des données aberrantes. Cette opération reste délicate, d’autant
plus que l’algorithme (3.11) appliqué aux systèmes étudiés ne détecte aucune donnée
aberrante lors des premières re-circulations, tant que la taille de l'ellipsoïde courant
demeure assez grande. Nous procédons donc comme suit : on applique l'algorithme (3.11)
en procédant à une circulation des données comme indiqué plus haut jusqu’à
convergence ou détection d’une donnée aberrante. Si une donnée aberrante est détectée,
cette dernière est éliminée du jeu de données puis l’algorithme est re-initialisé (centre à
zéro et taille de l'ellipsoïde grand) ; la donnée aberrante ayant déjà contribuée à
l'estimation lors de précédentes re-circulations, l'ellipsoïde courant n'est pas correct. Le
taux de données aberrantes est calculés après convergence, c'est-à-dire quand aucune
donnée aberrante n'est plus détectée et que la taille de l'ellipsoïde ne diminue plus. Nous
validons finalement les résultats obtenus si ce taux reste inférieur au seuil choisi a
priori. On peut noter que la démarche proposée est aussi applicable au filtrage
parallélotopique défini par l'algorithme de la table 1.
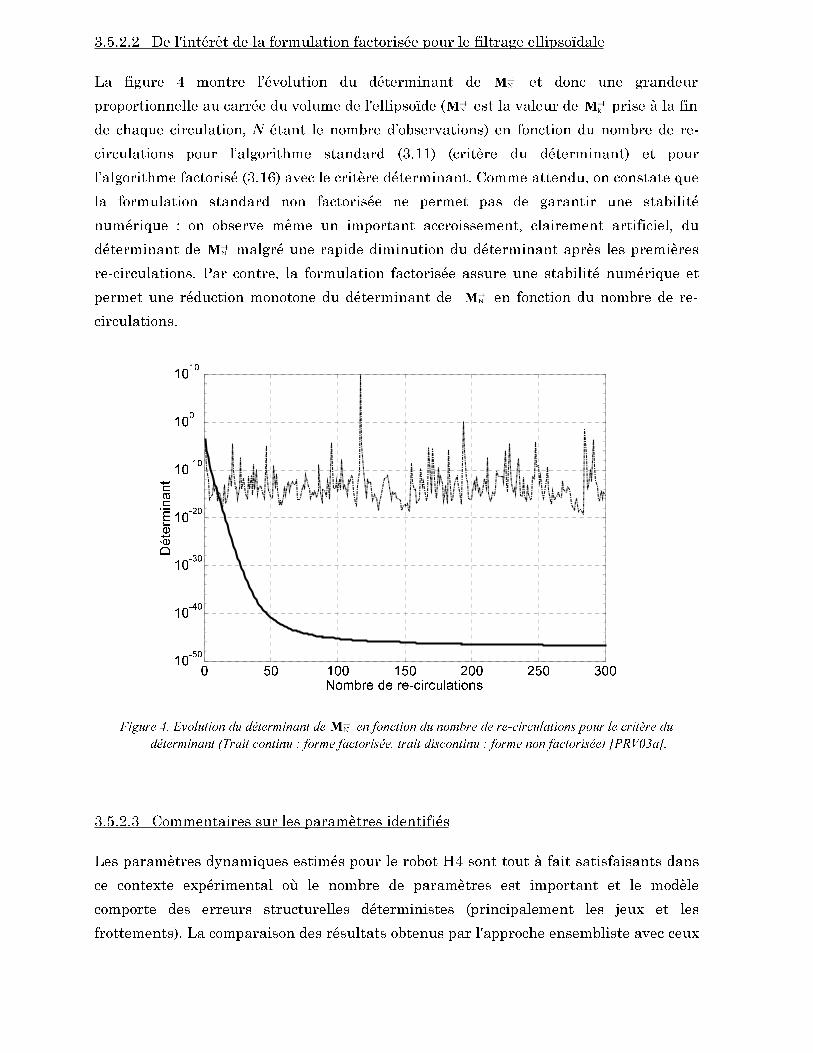
36 Chapitre 3
3.5.2.2 De l'intérêt de la formulation factorisée pour le filtrage ellipsoïdale
La figure 4 montre l’évolution du déterminant de 1
N
−
M et donc une grandeur
proportionnelle au carrée du volume de l'ellipsoïde ( 1
N
−
M est la valeur de 1
k
−
M prise à la fin
de chaque circulation, N étant le nombre d’observations) en fonction du nombre de re-
circulations pour l’algorithme standard (3.11) (critère du déterminant) et pour
l’algorithme factorisé (3.16) avec le critère déterminant. Comme attendu, on constate que
la formulation standard non factorisée ne permet pas de garantir une stabilité
numérique : on observe même un important accroissement, clairement artificiel, du
déterminant de 1
N
−
M malgré une rapide diminution du déterminant après les premières
re-circulations. Par contre, la formulation factorisée assure une stabilité numérique et
permet une réduction monotone du déterminant de 1
N
−
M en fonction du nombre de re-
circulations.
0 50 100 150 200 250 30010
-50
10-40
10-30
10-20
10-10
100
1010
Nombre de re-circulations
Déterminant
Figure 4. Evolution du déterminant de 1
N
−
M en fonction du nombre de re-circulations pour le critère du
déterminant (Trait continu : forme factorisée, trait discontinu : forme non factorisée) [PRV03a].
3.5.2.3 Commentaires sur les paramètres identifiés
Les paramètres dynamiques estimés pour le robot H4 sont tout à fait satisfaisants dans
ce contexte expérimental où le nombre de paramètres est important et le modèle
comporte des erreurs structurelles déterministes (principalement les jeux et les
frottements). La comparaison des résultats obtenus par l'approche ensembliste avec ceux
Méthodes ensemblistes pour modèles linéaires 37
fournis par l'approche, classique en robotique, des moindres carrés pondérés a révélé une
différence significative entre ces résultats, tant en termes de valeurs de paramètres
qu'en termes d'incertitudes associées [PRV03a,b] [RP06]. En ce qui concerne le
manipulateur série SCARA, nous avons mis en lumière des problèmes similaires quant à
la présence probable d’un biais dans les résultats obtenus dans le contexte probabiliste.
De plus, les incertitudes calculées dans le contexte à erreurs bornées sont plus étroites
que celles obtenues dans le contexte probabiliste, pour le jeu de données expérimentales
utilisées. Enfin, nous avons montré que les intervalles d’incertitudes obtenus par filtrage
parallélotopique sont plus étroits que ceux obtenus par filtrage ellipsoïdale (pour les
deux critères) [RP05].
3.6 Publications [RP05a] N. Ramdani, P. Poignet, Robust dynamic experimental identification of robots with set
membership uncertainty, IEEE/ASME Transactions on Mechatronics 10(2):253-256, 2005.
This paper focuses on robust dynamic identification of robots with set membership uncertainty.
The error, taken additive on model output (input motor torque), is only assumed to be bounded.
Three bounded-error recursive algorithms are implemented to outer-bound the solution parameter
set with ellipsoids or parallelotopes. Experimental results are presented for a two degrees of
freedom SCARA robot.
[PRV03a] P. Poignet, N. Ramdani, A. Vivas, Approche ellipsoïdale factorisée pour l’estimation de
paramètres dynamiques physiques de robots parallèles, APII-Journal Européen des
Systèmes Automatisés 37(9):1111-1127, 2003.
Cet article présente une alternative à l’estimation de type maximum de vraisemblance,
usuellement employée pour l’estimation des paramètres physiques du modèle dynamique d’un
robot, au travers de l’application de méthodes d’estimation dans un contexte à erreur bornée. Le
robot est modélisé avec les équations de Lagrange qui conduisent à un modèle dynamique inverse
linéaire par rapport aux paramètres à identifier. L’erreur est prise additive sur l'entrée du système
(le couple moteur) et elle est supposée bornée. Dans ce contexte à erreur bornée, nous utilisons une
méthode ellipsoïdale, en minimisant deux types de critère (déterminant ou trace). Cette méthode
est mise en œuvre dans sa forme factorisée pour être numériquement stable. Des résultats
expérimentaux sont présentés pour un robot pleinement parallèle à 4 degrés de liberté.
[PRV03b] P. Poignet, N. Ramdani, A. Vivas, Ellipsoidal estimation of parallel robot dynamic
parameters, Proceedings of IEEE/RSJ IROS 2003, pp. 3300-3305
This paper presents the application of an ellipsoidal method for robust dynamic identification of
parallel robots. The robot is modelled with classical Lagrange equation which leads to an inverse
dynamic model linear with respect to the parameters. Assuming the error additive on input (motor
torque), the problem is expressed in a bounded error context. The ellipsoidal method is applied in a
factorised form in order to guarantee numerical stability. Experimental results are exhibited for a
fully parallel robot with 4 degrees of freedom
[PRV03c] P. Poignet, N. Ramdani, A. Vivas, Robust estimation of parallel robot dynamic
parameters with interval analysis, Proceedings 42th IEEE Conference on Decision and
Control, CDC2003, Maui, USA, pp. 6503-6508.
This paper deals with the application of interval analysis for outer bounding the physical

38 Chapitre 3
parameters of parallel robots. The robot is modelled with classical Lagrange equation which leads
to an inverse dynamic model linear with respect to the parameters. Assuming the error additive on
input (motor torque), the problem is termed as a constraint propagation one and the solution is
performed with a pre-conditionned Gauss-Seidel contractor modified in order to be used with over-
determined linear systems. Experimental results are exhibited for a fully parallel robot with 4
degrees of freedom.
[RP06] N. Ramdani, P. Poignet, Experimental parallel robot dynamic model Evaluation with set
membership estimation, 14th IFAC Symposium on System Identification 2006, soumise.
This paper presents the application of an ellipsoidal method for robust dynamic identification of
parallel robots. The robot is modelled with classical Lagrange equation which leads to an inverse
dynamic model linear with respect to the parameters. Assuming the error additive on input (motor
torque), the problem is expressed in a bounded error context. The ellipsoidal method is applied in a
factorized form in order to guarantee numerical stability. Friction model evaluation is performed
from experimental results exhibited for a fully parallel robot with 4 degrees of freedom.
Chapitre 4
Méthodes ensemblistes pour modèles
non-linéaires et à variables complexes ;
Application en mesure physique.
Dans ce chapitre, j'aborde la question de l'identification de paramètres dans un contexte
à erreurs bornées pour le cas des modèles non-linéaires. J'aborderai d'abord le problème
de la présence d'incertitudes dans les modèles puis le cas des modèles à variables
complexes.
4.1 Motivations : Identification de paramètres
Dans le cadre de mes travaux, je me suis intéressé au problème de l'identification de
paramètres en présence d'incertitudes de modèles. Aussi, dans la suite, je considérerai
deux types de paramètres : les paramètres inconnus à identifier, représentés par le
vecteur p ; et des paramètres du modèle supposés connus, ce sont les paramètres de
nuisance regroupés dans un vecteur q. Je suppose de plus que p Œ P et q Œ Q, où les
domaines P et Q sont connus a priori : bien évidemment, le domaine Q traduira
l'incertitude physique sur les paramètres de nuisance alors que P correspond à un
domaine de recherche physiquement admissible pour les paramètres inconnus. Ce
dernier peut être très grand.
Définissions l'erreur de sortie e = y – f(p,q), où y est le vecteur des données
expérimentales et où f(.,.) est la sortie du modèle. Notre objectif est la détermination de
tous les vecteurs de paramètres pour lesquels l'erreur de sortie reste confinée dans un
domaine admissible E, défini a priori, c'est-à-dire e Œ E.
Supposons d'abord que les paramètres de nuisance sont fixés à une valeur nominale q*
connue. L'ensemble C à estimer est l'ensemble des vecteurs de paramètres acceptables p
défini par
( ) , , ∗= ∈ ∈p f p qC P Y (4.1)
avec Y = y – E.
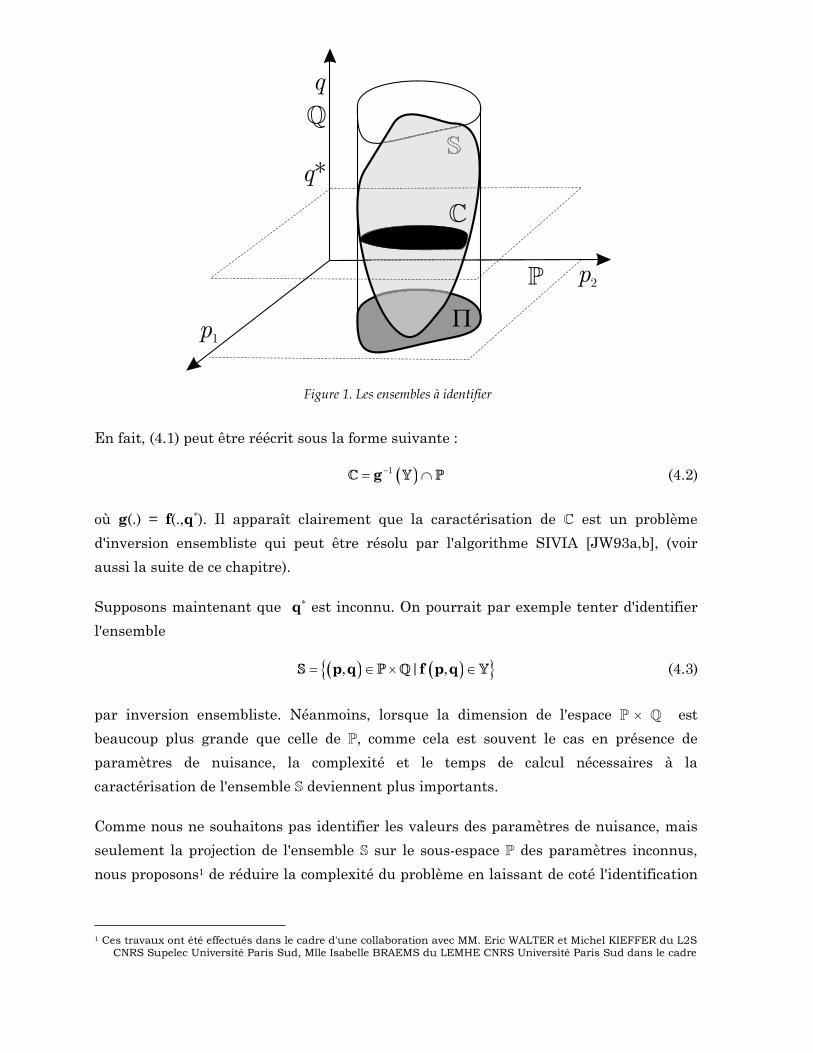
En fait, (4.1) peut être réécrit sous la forme suivante :
( )−= ∩C Y P1g (4.2)
où g(.) = f(.,q*). Il apparaît clairement que la caractérisation de C est un problème
d'inversion ensembliste qui peut être résolu par l'algorithme SIVIA [JW93a,b], (voir
aussi la suite de ce chapitre).
Supposons maintenant que q* est inconnu. On pourrait par exemple tenter d'identifier
l'ensemble
( ) ( ) = ∈ × ∈S P Q Y, | ,p q f p q (4.3)
par inversion ensembliste. Néanmoins, lorsque la dimension de l'espace P × Q est
beaucoup plus grande que celle de P, comme cela est souvent le cas en présence de
paramètres de nuisance, la complexité et le temps de calcul nécessaires à la
caractérisation de l'ensemble S deviennent plus importants.
Comme nous ne souhaitons pas identifier les valeurs des paramètres de nuisance, mais
seulement la projection de l'ensemble S sur le sous-espace P des paramètres inconnus,
nous proposons1 de réduire la complexité du problème en laissant de coté l'identification
1 Ces travaux ont été effectués dans le cadre d'une collaboration avec MM. Eric WALTER et Michel KIEFFER du L2S
CNRS Supelec Université Paris Sud, Mlle Isabelle BRAEMS du LEMHE CNRS Université Paris Sud dans le cadre
p1
S
p2
q
P
q*
C
Q
Figure 1. Les ensembles à identifier
de q et en caractérisant directement l'ensemble Π de tous les vecteurs de paramètres p
acceptables pour tout vecteur de paramètres q pris dans son domaine admissible a
priori, soit
Π =PSproj (4.4)
c'est-à-dire ( ) Π = ∈ ∃ ∈ ∈P Q Y| , ,p q f p q (4.5)
La figure 1 montre les trois ensemble C, S et Π. Alors que C est une coupe de S, Π est la
projection de S sur le sous-espace des paramètres p. Enfin, l'inclusion C Ã Π, illustre le
fait que le volume (une surface en dimension 2) de Π est plus grand que celui de C. En
d'autre termes, l'incertitude affectant les paramètres de nuisance q provoque un
accroissement de l'incertitude a posteriori des paramètres identifiés p.
4.2 Calculs ensemblistes par le biais d'intervalles réels
Dans cette partie, je rappelle succinctement les outils théoriques fondamentaux,
aujourd'hui relativement bien connus de la communauté intervalles.
4.2.1 Arithmétique d'intervalles réels.
Contrairement à ce que l'on pourrait croire, le concept d'arithmétique des intervalles est
assez ancien : au 3e siècle avant notre ère, Archimède avait déjà eu l'idée d'encadrer le
nombre adimensionnel π entre une borne supérieure et une borne inférieure [Arc1953].
Plus récemment, R. C. Young étudia en 1931 dans sa thèse [You31] le concept de la
manipulation d'un ensemble de grandeurs pouvant prendre plusieurs valeurs (many-
valuedness) par une unique opération, en approfondissant une idée formulée par W.H.
Young en 1908 [You08]. Les bases de la théorie de l'arithmétique des intervalles ont
ensuite été établies par plusieurs auteurs (vraisemblablement indépendamment les uns
des autres, mais ceci est une autre histoire!) par P.S.Dwyer [Dwy51] aux USA,
M.Warmus [War56] en Pologne, T.Sunaga [Sun58] au Japon et R.Moore [Moo59]
[Moo66] aux USA. Certains considèrent que c'est la thèse de R. Moore qui a contribué de
manière significative à une plus large diffusion de l'arithmétique d'intervalles.
Initialement développée pour tenir compte des erreurs de quantification introduites par
la représentation en virgule flottante des nombres réels à l'aide d'ordinateur,
l'arithmétique d'intervalles est utilisée aujourd'hui utilisée pour apporter des résultats
numériques validés (ou vérifiés) [Neu90], [JKDW01]
de sa thèse au L2S sous la direction de Mr. Eric WALTER, et avec M. Luc JAULIN de l'E3I2 ENSIETA

Un intervalle [ ] [ ]= ,a a a de R est un ensemble fermé, connexe et non vide. L’ensemble
des intervalles de R est noté par IR. La largeur de l'intervalle [ ]a est définie par
= −w a a a( ) et le centre par = + / 2m a a a( ) ( ) . Soient [x] et [y] deux intervalles, alors les
opérations élémentaires ∈ + − × ÷ , , , sont définies par (pour la division, 0 ∉ [y]) :
[ ] [ ] = | [ ] et [ ]∈ ∈ x y x y x x y y (4.6)
On considère une fonction f de →n mR R ; l'image d'un vecteur intervalle [a] par cette
fonction est donnée par
[ ]( ) ( ) [ ] | ∈f a f x x a (4.7)
la fonction intervalle [f] de →I In m
R R est une fonction d'inclusion pour f si
[ ] [ ]( ) [ ] [ ]( )∀ ∈ ⊆,na f a f aIR (4.8)
Elle est dite minimale si pour tout pavé [ ]∈ na IR , [ ] [ ]( )f a est le plus petit pavé
contenant [ ]( )f a .
La fonction d’inclusion n’est pas unique. La forme la plus simple, appelée fonction
d’inclusion naturelle, s’obtient en remplaçant chaque variable ponctuelle par la variable
intervalle correspondante. Néanmoins, le pessimisme obtenu dépendra de l'expression
formelle de la fonction f.
4.2.2 Problème de satisfaction de contraintes, contracteurs
On considère n variables xi ∈ R, i ∈ 1,2,…,n, liées par nf relations de la forme
=…1 2( , , , ) 0j nf x x x (4.9)
A chaque variable xi est associée un domaine initial connu a priori [xi]0.
Posons le vecteur …
T
1 2 = ( , , , )nx x xx et la fonction vectorielle …
T
1 2= ( , , , )fnf f ff x x x x( ) ( ) ( ) ( ) .
La relation (4.9) peut être réécrite sous la forme d'un problème de satisfaction de
contraintes (ou CSP – constraint satisfaction problem) [JKDW01] :
H : ( ∈ = , f x 0 x x 0( ) [ ] ) (4.10)
L'objectif est de déterminer le plus petit domaine [x] contenant les solutions du CSP
(4.10) : c'est ce que réalisent les contracteurs ou fonctions de réduction.
Un opérateur CH est un contracteur pour le CSP H défini par (4.10) si, pour tout pavé
intervalle [x] inclus dans [x]0, il vérifie les propriétés suivantes :
(i) la contractance : [ ] [ ]∀ ⊂0
x x , [ ]( ) [ ]⊂HC x x
(ii) la monotonie : [ ] [ ]∀ ⊂0
y x , [ ] [ ]∀ ⊂0
z x , [ ] [ ]⊆ ⇒y z [ ]( ) [ ]( )⊆H HC Cy z
(iii) la complétude : [ ] [ ]∀ ⊂0
x x , [ ]( ) [ ]∩ ⊂ ∩S SHC x x
où ∩ est l'intersection de deux pavés et S l'ensemble solution de H.
Une méthode pour résoudre le CSP (4.10) est de définir une fonction Ψ vérifiant
= ⇔ = Ψ( ) ( )f x 0 x x (4.11)
Grâce au théorème du point-fixe et compte tenu de (4.11), si la série + = Ψ1[ ] ([ ] )k kx x
converge vers ∞[ ]x , alors ∞[ ]x contiendra la solution de H.
Plusieurs solveurs issus de l'analyse numérique classique en virgule flottante comme la
méthode de Newton, de Gauss-Seidel ou l'opérateur de Krawczyk ont fait l'objet d'une
extension aux intervalles ; ces méthodes intervalles permettent de résoudre de manière
fiables des CSPs linéaires et non-linéaires. Elles restent cependant limitées aux
problèmes pour lesquels le nombre de contraintes et de variables sont identiques
[Moo66], [Neu90], [JKDW01], [HW04].
Lorsque le nombre de contraintes et le nombre de variables différent, on utilise un
contracteur fondé sur des techniques de propagation de contraintes. Ces dernières
associent les techniques de propagation de contraintes utilisées de manière classique
dans le domaine de l'intelligence artificielle avec l'arithmétique d'intervalles
[Cle87],[Dav87]. Elles ont été introduites en automatique par M. Jaulin dans [Jau00]
pour résoudre des problèmes d'inversion ensembliste. L'algorithme utilisé pour la
propagation de contraintes est une extension aux intervalles de l'algorithme de filtrage
local de Waltz [Wal75]. En fait, les relations (4.9) entre les variables peuvent être
considérées comme un réseau dans lequel les nœuds sont connectés par des arcs
représentant les contraintes. Pour propager les conséquences de chaque nœud sur le
réseau, l'idée est de traiter localement un petit groupe de nœuds et d'arcs, c'est-à-dire de
variables et de contraintes, puis d'enregistrer les changements dans le réseau. En
procédant de la sorte de proche en proche, il est possible de propager des modifications
dans le réseau. De la sorte, toutes les valeurs des variables inconsistantes seront
éliminées. Lorsque le graphe est acyclique, alors une réduction (contraction) optimale
peut être atteinte grâce à une propagation dans le sens direct et une propagation dans le
sens rétrograde : le contracteur obtenu est connu sous le nom de forward-backward
contractor [JKDW01].

4.2.3 Inversion ensembliste par arithmétique d'intervalles
On considère le problème de la détermination de l'ensemble solution pour les grandeurs
inconnues u définies par
( ) [ ] [ ]( )−= ∈ Ψ ∈ = Ψ ∩S U U1|u u y y (4.12)
où [y] est connu a priori, U est le domaine de recherche initial pour u choisi a priori et ψψψψune fonction non-linéaire non nécessairement inversible au sens classique. Le problème
(4.12) est un problème d'inversion ensembliste qui peut être résolu de manière fiable par
SIVIA (Set Inversion Via Interval Analysis). SIVIA [JW93a,b] est un algorithme récursif
qui explore tous l'espace de recherche sans perdre aucune solution. Il permet d'obtenir,
de manière garantie, un encadrement de l'ensemble solution S de la manière suivante
⊆ ⊆S S S (4.13)
L'approximation (ou encadrement) intérieur S est constituée des pavés acceptables
(faisables) : pour prouver qu'une boite [u] est acceptable, il suffit de prouver que
Ψ ⊆u y[ ]([ ]) [ ] ; à l'inverse, si on peut prouver que Ψ ∩ =∅u y[ ]([ ]) [ ] , alors le pavé [u] est
inacceptable. Le cas échéant, aucune conclusion ne peut être atteinte et le pavé [u] est
dit ambigu : il est bissecté – coupé en deux – et les deux sous-pavés testés à nouveau
jusqu'à ce que leur taille, par exemple, atteint un seuil ε > 0 fixé par l'utilisateur ; on
procédant de la sorte, on assure que l'algorithme SIVIA converge en un nombre fini
d'itérations [Jau93a,b].
L'approximation (ou encadrement) extérieur S est définie par
= ∪ ∆S S S (4.14)
où ∆S est une couche d'incertitude formée par l'union de tous les pavés ambigus dont la
taille est en deçà de ε .
Remarque : D'autres tests d'arrêts peuvent aussi être utilisés : taille relative de pavé,
taille (éventuellement relative) du pavé image.
4.2.4 Projection ensembliste par arithmétique d'intervalles
Pour caractériser la projection Π , on ne peut pas utiliser SIVIA directement. Mais on
peut utiliser l'algorithme de projection PROJECT développé dans [JBW02] et [BJK+03],
et qui permet de calculer les approximations intérieure Π et extérieure Π de l'ensemble
Π défini par (4.5). Comme on ne procède à la bissection que dans l'espace des
paramètres p, la mémoire et le temps de calcul requis sont beaucoup plus faibles que
ceux nécessaires pour caractériser S, tel que défini par (4.3).
La différence entre PROJECT et SIVIA réside dans les tests d'inclusion à implémenter :
alors que dans SIVIA, l'approximation extérieur [g]([p]) est utilisée directement pour
tester l'acceptabilité de tous les éléments de [p], dans PROJECT, [p] ne sera dit
acceptable que s'il existe q∈Q tel que ⊆ Yf p q[ ]([ ], ) .
Le lecteur trouvera le détail de l'algorithme PROJECT dans les publications [BRKW03,
Caractérisation garantie d'un dispositif de mesure de grandeurs thermiques] et [BJK+03,
Reliable parameter estimation in presence of uncertainty], jointes en annexe de ce
document.
4.3 Calculs ensemblistes par le biais d'intervalles complexes
Dans la littérature, on trouve principalement deux représentations des intervalles
complexes : les intervalles circulaires et les intervalles rectangulaires [RL71], [Hen71],
[KU80], [Nic80], [PP98]. Pour la représentation circulaire, on définit un intervalle
complexe circulaire, c'est-à-dire un disque, par son centre et son rayon. En revanche, un
intervalle rectangulaire est défini par deux intervalles réels : un pour la partie réelle et
l'autre pour la partie imaginaire. Il est facile de vérifier que l’addition et la soustraction
de deux intervalles complexes représentés par les formes circulaires et rectangulaires
sont des opérations exactes, i.e. la somme (ainsi que la différence) de deux intervalles
complexes est encore un intervalle complexe, alors que la multiplication et la division ne
le sont pas. Ces deux représentations sont donc très efficaces lorsque le modèle utilisé est
linéaire.
Or l'étude des systèmes physiques dans le domaine fréquentiel est généralement réalisée
par le biais de modèles non-linéaires de variables complexes fondés sur des fonctions
trigonométriques, exponentielles ou transcendantales. Par conséquent, la qualité et la
performance des résultats d'estimation ensembliste dans ce cas dépendront fortement de
la qualité des fonctions d'inclusion utilisées.
Dans le cadre de nos travaux de recherche2, nous avons cherché une représentation des
intervalles complexes qui conduisait à des fonctions d'inclusions les moins pessimistes
pour des opérateurs non-linéaires. Notre choix a porté sur la représentation des
intervalles complexes sous forme polaire, c'est-à-dire sous la forme de secteurs, car la
fonction d'inclusion pour la multiplication et la division de secteurs est exacte et donc
2 Ces travaux correspondent au travail de Thèse de Doctorat de Mr. Tarek RAÏSSI au CERTES EA3481 Université
Paris XII Val de Marne

minimale. Cependant, l'addition et la soustraction ne le sont plus.
Notre contribution a porté sur la définition d'algorithmes permettant de trouver le plus
petit secteur contenant la somme (ou la différence) de deux secteurs intervalles
[CRRI06]. Je rappelle dans la suite les idées de base de ces algorithmes ; le lecteur peut
aussi consulter le texte de la publication [CRRI06, Complex interval arithmetic using
polar form] jointe en annexe.
4.3.1 Secteur intervalle : Définition
Soient [ ]ρ +⊆R et [ ]θ ⊆ R . L’ensemble Z tel que :
[ ] ( ) [ ] ρ θ= ∈ ∈ ∈| , argZ z z zC (4.15)
est un intervalle complexe polaire, que nous nommerons dans la suite secteur, noté
[ ] [ ] ρ θ, (voir figure 2). L’ensemble des intervalles complexes polaires sera noté par
( )S C .
Un secteur est alors caractérisé par deux paramètres : son module [ ]ρ ρ ρ− + = ,
( ρ − ≥ 0 ) et son argument [ ]θ θ θ = , (de taille inférieure ou égale à π2 ). Pour assurer
l’unicité de la représentation, on peut choisir les bornes de l’angle θ[ ] de la manière
suivante :
θ θ π θ π θ π+ − − +≤ − ≤ ≤ < ≤ <0 2 , 0 2 , 0 4 (4.16)
π/3
π/6
5π/4
3π/4
−3π/4
Figure 2. Orientation d’un secteur
4.3.2 Opérations arithmétiques
Soient ρ θ1 1 1=[ ],[ ]Z et ρ θ2 2 2=[ ],[ ]Z deux secteurs, l’opération de multiplication de Z1
et Z2 est définie comme suit :

( ) ( ) ( ) [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]
θ θρ ρ ρ ρ θ θ ρ ρ θ θρ ρ θ θ ρ θ
+
⋅ ∗ ∈ ∈
= ∗ ∈ × × ×
= ∗ + =
≜
1 1
1 2 1 2 1 1 2 2
1 2 1 2 1 2 1 2 1 2
1 2 1 2
,
, , ,
; ;
i
Z Z z z z Z z Z
e (4.17)
Etant donné que l’ensemble des intervalles réels est fermé par rapport à l’addition et à la
multiplication, le produit de deux secteurs est aussi un secteur ; cette opération est donc
minimale. De la même manière, la division est définie par :
[ ] [ ] [ ] [ ] [ ] [ ] ρ θ ρ θ ρ θ ρ θρ ρ θ θ ρ θ
= ∈ ∈
= − =
1 2 1 1 2 2 1 1 1 2 2 2
1 2 1 2
; / ; | ; , ;
/ ; ;
Z Z Z Z(4.18)
avec ]ρ∉ 20 [ . Nous signalons ici que les bornes du résultat peuvent ne pas respecter la
condition (4.16). Dans ce cas, nous devons rajouter π2k (où ∈k Z ) à l’angle [ ]θ pour
satisfaire à cette condition.
Contrairement à l’opération de multiplication, la somme de Minkowski [FP02] de deux
secteurs, définie par :
⊕ = + ∈ ∈1 2 1 2 1 1 2 2| ,Z Z z z z Z z Z (4.19)
n’est pas un secteur mais un ensemble de forme géométrique complexe. Par conséquent,
pour définir l’opération + dans l’ensemble S(C), il faut calculer un secteur ∈ ( )Z S Z
contenant ⊕1 2Z Z . Néanmoins, un pessimisme est systématiquement introduit. Pour
minimiser ce pessimisme, nous définissons Z1+Z2 comme étant le plus petit secteur
contenant Z1≈Z2 :
( )1 2 1 2, ,Z Z Z Z Z Z Z+ = ∩ ∈ ⊕ ⊂ ∩S C (4.20)
L’existence du secteur Z1+Z2, défini par (4.20), est assurée étant donné que l’intersection
d’un nombre quelconque de pavés de fermés de 2R est un pavé.
Nous rappelons que la soustraction est définie de la même manière
Z1 – Z2 = Z1 + (–Z2), où = (–Z2) = z | –z Œ Z2 (4.21)
Elle ne nécessite donc pas un traitement supplémentaire. Pour cette raison, nous ne
considérons dans la suite que l’addition.
4.3.3 Caractérisation de la somme de deux secteurs
Soient : [ ] [ ] ρ θ=1 1 1;Z , [ ] [ ] ρ θ=2 2 2;Z ∈ ( )S C et [ ] [ ] ρ φ= ;Z , alors les bornes ρ–
et ρ+ de [ρ] vérifient :

ρ
ρ
−∈ ⊕
+
∈ ⊕
= =1 2
1 2
min
max
z Z Z
z Z Z
z
z(4.22)
où
( )θ θρ ρ ρ ρ ρ ρ θ θ+ = + + −1 2 2 2
1 2 1 2 1 2 1 22 cosi i
e e (4.23)
Etant donné que la fonction « racine carrée » est strictement croissante, calculer ρ −
revient à résoudre :
( )ρ ρ θΩ 1 2min , ,f (4.24)
où
( ) ( )ρ ρ θ ρ ρ ρ ρ θ+ +֏2 2
1 2 1 2 1 2: , , 2 cosf (4.25)
[ ] [ ] [ ] [ ]ρ ρ θ π+ +Ω = × × ⊂ × ×ℝ ℝ1 2 0,2
De même, calculer ρ+ revient à maximiser la fonction f. D’un autre coté, les bornes de [φ]
sont solutions de :
( )( )
φφ
−∈ ⊕
+
∈ ⊕
= =1 2
1 2
min
max
z Z Z
z Z Z
A z
A z(4.26)
où A(z) est l’angle du nombre complexe ∈ ⊕1 2z Z Z . On note par : θρ= 1
1 1
iz e ,
θρ= 2
2 2
iz e ,
θ θθρ ρ ρ= = +1 2
1 2
i iiz e e e et ρ ρ= 1 2x , alors :
( ) ( )φ θ θ= 1 2tan , ,g x (4.27)
avec :
( ) θ θρ ρ θ θ θ θ+
=+
1 21 2 1 2
1 2
sin sin, , ,
cos cos
xg
x(4.28)
Tout extremum de A correspond à un extremum de g étant donné que la fonction « tan »
est strictement croissante.
Pour récapituler, calculer les bornes du module [ρ] et de l’angle [φ] revient à résoudre
quatre problèmes d’optimisation sous contraintes. Dans les paragraphes suivants, nous
allons donner la méthodologie à suivre pour résoudre analytiquement ces problèmes
d’optimisation.

4.3.4 Conditions d’optimalité
Soient [ ] [ ] [ ]Ω = × × ⊂ 3
1 2 3u u u et Ω→:f R . Considérons alors le problème
d’optimisation :
Ωmax f (4.29)
En tenant compte du fait que Ω est un ensemble compact et convexe, le problème (4.29)
possède une solution ( )∗ ∗ ∗ ∗= 1 2 3, ,u u uu . Le ième composant ∗
iu de ∗u doit vérifier l’une des
conditions suivantes :
( ) ( )∗ ∗∂ ∂= ≤∂ ∂
2
20 et 0
i i
f f
u uu u (4.30)
( )− ∗∂= <∂
* et 0i i
i
fu u
uu (4.31)
( )+ ∗∂= >∂
* et 0i i
i
fu u
uu (4.32)
Nous rappelons que pour le cas de la minimisation de f, les mêmes conditions sont
appliquées mais en inversant le sens des inégalités.
Nous remarquons que chacune de ces conditions est composée d’une première partie
donnée par une équation (condition de premier ordre) et d’une seconde partie définie par
une inégalité (condition de second ordre). Un ensemble de 3 conditions de premier ordre,
une pour chaque indice i, est un système d’équations qui a généralement au plus une
solution. Dans la suite, nous appellerons candidat tout point de Ω1 qui vérifie, pour
chacun de ces éléments, une des conditions du premier ordre. Si en plus, les conditions
du second ordre sont satisfaites, le candidat est dit acceptable et il correspond donc à un
minimum local.
La stratégie que nous avons retenu pour résoudre ce problème d’optimisation consiste à
déterminer analytiquement tous les candidats en examinant toutes les combinaisons des
conditions du premier ordre, et ensuite, éliminer les candidats qui ne peuvent jamais
être acceptables en examinant les conditions du second ordre. Le maximum parmi les
candidats acceptables est le maximum global. Le détail complet de l'algorithme est
fourni dans le texte de la publication [CRRI06 : Complex interval arithmetic using polar
form] jointe en annexe.
4.4 Mise en œuvre expérimentale : Identification de
propriétés physiques de matériaux
La mise en œuvre expérimentale des méthodes ensemblistes pour l'identification "erreur
bornée" a porté sur des données provenant de deux contextes différents mais utilisant
tous deux des modèles à variables complexes :
(i) l'identification garantie de propriétés thermiques en présence de paramètres de
nuisances incertains ; et
(ii) l'analyse des spectres de relaxation électrique de matériaux polymères.
4.4.1 Identification garantie de propriétés thermiques en présence de
paramètres de nuisance
4.4.1.1 Motivations
L'objectif de ces travaux consiste à identifier de manière garantie la conductivité et la
diffusion thermique de matériaux composites par une méthode périodique et à évaluer
de manière fiable un intervalle d'incertitude pour le vecteur de paramètres identifiés,
tout en tenant compte de toutes les sources d'erreurs agissant sur le système : erreurs de
mesure et erreurs de modélisation additives sur la sortie, incertitudes de modèle
(paramètres de nuisances incertains). Ces travaux ont été réalisés dans le cadre de la
thèse de Mlle Braems [Bra03] puis plus récemment [BRB+05], en mettant en œuvre les
algorithmes SIVIA et PROJECT sur des données expérimentales réelles obtenues par M.
Tang Kwor [Tan98] en 1998 et par M. Boudenne [BIGC04] en 2003, sur les bancs d'essai
du CERTES (voir l'exemple de la figure 3). Les domaines admissibles pour les sorties ont
été obtenus en répétant la mesure 30 fois pour la première et 20 fois pour la seconde.
4.4.1.2 Contributions
De manière synthétique, les résultats obtenus peuvent se résumer comme suit (le lecteur
pourra consulter le texte des publications [BRKW03, Caractérisation garantie d'un
dispositif de mesure de grandeurs thermiques], [BRB+05, New set-membership techniques
for parameter estimation in presence of model uncertainty] et [RRC+05, Set membership
parameter identification with complex intervals using polar forms] jointes en annexe) :
1. Dans une première phase, nous avons traité le cas sans incertitudes de modèle, ce
qui revient à considérer que les paramètres de nuisance ont une valeur certaine et
bien connue. Pour certaines valeurs nominales des paramètres de nuisances,
l'algorithme SIVIA montre en un temps de calcul négligeable que l'ensemble solution
est vide : les domaines retenus pour la sortie du modèle et les hypothèses de
modélisation (y compris les valeurs choisies pour les paramètres de nuisance) sont
incompatibles.
2. Lorsque les domaines retenus pour la sortie du modèle et les hypothèses de
modélisation sont compatibles, c'est-à-dire que l'algorithme SIVIA fournit des
encadrements intérieur et extérieur de l'ensemble solution, les intervalles
d'incertitudes obtenus pour les paramètres identifiés sont satisfaisants. De plus, la
taille de la couche d'incertitude ∆C de l'ensemble solution C, est très petite.
3. La prise en compte des incertitudes de modèle conduit à un ensemble solution se
traduisant en des intervalles d'incertitudes pour les paramètres identifiés plus larges
que ceux obtenus au point 2.
4. Nous avons pu procéder à l'évaluation de l'influence de l'incertitude affectant chaque
paramètre de nuisance sur le volume de l'ensemble solution. Cette analyse de
sensibilité d'un genre particulier nous a permis d'exhiber les sources d'erreurs les
plus influentes et donc celles dont la réduction conduirait à la réduction du volume de
l'ensemble solution.
Néanmoins, la qualité de l'approximation de l'ensemble solution obtenu par projection
ensembliste, c'est-à-dire la taille de la couche d'incertitude ∆Π de Π, reste importante. Ce
mauvais résultat est du au pessimisme des fonctions d'inclusion construites avec des
intervalles complexes représentés sous forme rectangulaire. L'utilisation de
l'arithmétique des secteurs pourrait apporter une solution à ce problème [RRC+05].
Figure 3. Photographie du dispositif expérimental développé par Mr. Boudenne [BIGC04].
4.4.2 Sélection de structure et validation de modèles : application à l'analyse
des spectres de relaxation électrique de matériaux
4.4.2.1 Motivations
L'objectif est d'analyser les propriétés diélectriques de polymères à l'aide du modèle
d’Havriliak-Negami. Ce dernier correspond à une somme d'un nombre inconnu de modes
de relaxations dont les caractéristiques sont également inconnues. Il faut donc identifier
le nombre et les caractéristiques des modes de relaxation.
Habituellement, la caractérisation des spectres de relaxation diélectrique des matériaux
polymères s'appuie sur le calage de modèles semi-empiriques par minimisation de critère
quadratique. Cette démarche se heurte généralement à deux écueils majeurs: (i) Les
paramètres des modèles utilisés ne sont pas tous identifiables ; il n' y a pas unicité de la
solution. De ce fait, les méthodes d'optimisation locales classiquement utilisées échouent
souvent. (ii) La présence notable d'erreurs de modèles rend difficile la validation du choix
du nombre de relaxations par minimisation quadratique.
Nous avons donc abordé ce problème dans un contexte à erreurs bornées : Le problème
d’inversion ensembliste est alors résolu par SIVIA avec le contracteur forward-
backward.
4.4.2.2 Contributions
Les résultats obtenus peuvent se résumer comme suit, (le lecteur pourra consulter le
texte des publications [RRIC05, A reliable method for the estimation of dielectric
relaxation models parameters] et [RRCI05, Complex Interval Constraint Propagation for
Non Linear Bounded-Error Parameter Identification] :
1. L'utilisation de l'arithmétique des secteurs fournissant des fonctions d'inclusion
exactes pour la multiplication et l'exponentiation et de pessimisme maîtrisé pour
l'addition, permet l'obtention de graphe de contraintes acycliques. Le contracteur
propagation de contraintes devient assez efficace. Il n'est cependant pas minimal car
les fonctions d'inclusion utilisées ne le sont pas.
2. Nous avons évalué les stratégies de bissection et nous avons montré que pour le cas
étudié, des stratégies fondées sur la taille dans l'espace image pouvaient réduire le
temps de calcul [RRIC04].
3. Le pessimisme des fonctions d'inclusion, même avec une arithmétique des secteurs,
reste important : nous n'avons pas pu obtenir d'approximation intérieure en un
temps raisonnable [RIRC05, 04, 03].
4. Nous sommes capable de rejeter une structure de modèles, c'est-à-dire le nombre de
relaxations, lorsque ce dernier est insuffisant [RRIC05], [RIRC03, 04, 05].
Néanmoins, il reste à définir une méthodologie reproductible pour choisir le nombre
optimal. Dans ces études, le nombre de relaxation retenu est le plus petit nombre
conduisant à un ensemble solution non vide.
Des techniques de recherche de points intérieurs telles que suggérées dans [Jau00] ont
été étendue aux intervalles complexes et mis en œuvres dans ce contexte [RRCI05]. Il est
alors possible d'obtenir des approximations intérieures.
Une méthodologie générale de choix du nombre de relaxation reste à définir et des
techniques de consistance globale doivent être développées pour résoudre en des temps
raisonnable le problème de satisfaction de contraintes.
4.5 Publications
[CRRI06] Y. Candau, T. Raïssi, N. Ramdani, L. Ibos, Complex interval arithmetic using polar form,Reliable Computing 12(1):1–20, 2006.
In this paper, the polar representation of complex numbers is extended to complex polar intervalsor sectors; detailed algorithms are derived for performing basic arithmetic operations on sectors.While multiplication and division are exactly defined, addition and subtraction are not, and weseek to minimize the pessimism introduced by these operations. Addition is studied as anoptimization problem which is analytically solved. The complex interval arithmetic thus defined isillustrated with some numerical examples.
[BJK+03] I.Braems, L.Jaulin, M.Keiffer, N.Ramdani, E.Walter, Reliable parameter estimation inpresence of uncertainty, 13th IFAC Symposium on System Identification, Rotterdam,SYSID2003, pp.1856-1861.
In a bounded-error context, reliable set-inversion algorithms such as Sivia provide guaranteedestimates of the set of all the parameters deemed compatible with the selected model and thecollected data, assuming that all the uncertain variables of the model are those to be estimated. Inthis paper we propose a new approach to estimate the parameters of interest assuming that thereare other parameters that will not be estimated. This leads to the idea of set projection. A newalgorithm for set projection is proposed and applied to the estimation of thermal quantities via anew experimental device to be calibrated.
[BRKW03] I. Braems, N. Ramdani, M. Kieffer, E. Walter, Caractérisation garantie d'un dispositif demesure de grandeurs thermiques, APII-Journal Européen des Systèmes Automatisés 37(9):1129-1143, 2003.
Pour étalonner un dispositif de mesure thermique développé récemment, il est proposé de réaliserl’identification des paramètres thermo-physiques d’un échantillon de matériau à partir des donnéesexpérimentales recueillies sur ce dispositif. La prise en compte des erreurs de mesure et de modèleaboutit à une description de l’erreur de sortie par une grandeur incertaine bornée. L’estiméerecherchée est alors l’ensemble des valeurs du vecteur des paramètres compatibles avec les donnéesexpérimentales. D’abord nous supposons le dispositif de mesure modélisé à l’aide de grandeurs

parfaitement connues. L’identification est alors un problème d’inversion ensembliste. Nousmontrons ensuite que la prise en compte des incertitudes liées au dispositif de mesure est unproblème de projection d’ensembles. Dans ces deux cas, nous disposons d’algorithmes garantispour caractériser ces ensembles. Les résultats sont détaillés et comparés à ceux d’une estimationstatistique plus classique. Des améliorations du dispositif fondées sur ces résultats sont égalementproposées.
[BRB+05] I.Braems, N.Ramdani, A.Boudenne, L.Jaulin, L.Ibos, E.Walter, Y.Candau (2005), New set-membership techniques for parameter estimation in presence of model uncertainty, 5AIInt. Conf. Inverse Problems in Engineering: Theory, Practice, July 2005, Cambridge, UK.
This paper introduces new methods for estimating parameters and their uncertainty in the contextof inverse problems. The new techniques are capable of dealing with both measurement andmodelling errors but also with uncertainty in parameters of the model that are not to be estimated(nuisance parameters). All the uncertain quantities are taken as unknown but bounded. In such abounded-error context, reliable set-membership techniques are used to characterize, in aguaranteed way, the set of the unknown physical parameters that are compatible with the collectedexperimental data, the model and the prior error bounds. This ensures that no solution is lost. Themethodology described will be applied to the simultaneous identification of thermal conductivityand diffusivity of polymeric materials by a periodic method from actual experimental data. Theguaranteed approach provides a natural description of the uncertainty associated with theidentified parameters.
[RRC+05] N. Ramdani, T. Raïssi, Y. Candau, A. Boudenne, L. Ibos, Set membership parameteridentification with complex intervals using polar forms, IFAC World Congress Praha05,July 2005, acceptée.
This paper is dedicated to bounded error identification with complex valued non-linear models.Complex intervals are characterized by using polar forms and a new inclusion function is givenfor the addition of sectors. The latter is expressed as an optimization problem solved analytically.The new complex interval arithmetic is used with actual data and a complex valued non-linearmodel for the bounded error identification of the thermal properties of materials.
[RIRC03] T. Raïssi, L. Ibos, N. Ramdani, Y. Candau, Analyse de spectres de relaxation diélectriquepar arithmétique d’intervalles, NUMELEC2003, Toulouse, CD-Rom 2003.
Le but de ce papier est d’appliquer des outils ensemblistes à l’analyse des propriétés diélectriquesde polymères. L’estimation des paramètres du modèle est réalisée dans un contexte à erreursbornées, permettant par rapport aux techniques classiques des moindres carrés et d’optimisationlocale de trouver toutes les solutions compatibles avec les mesures.
RIRC04] T.Raïssi, L.Ibos, N.Ramdani, Y.Candau Guaranteed method for the estimation ofdielectric relaxation models parameters, IEEE International Conference on Solid DielectricsICSD 2004, Toulouse.
In this paper, a guaranteed method for the estimation of dielectric relaxation model parameters ispresented. The only assumption used is that data uncertainty is bounded. The main difference withclassical methods based on least squares minimisation is that the solution is not a point but leadsto a set. When least squares methods are used, the model structure should be known. In somecases, this information is not available (for instance because there is not enough data); in this casethe identification process can lead to unacceptable results. In this paper, a new technique, based oninterval analysis, allowing the rejection of models that are not consistent with data is presented.

[RRIC04] T. Raïssi, N. Ramdani, L. Ibos, Y. Candau (2004) Analyse de propriétés diélectriques dansun contexte à erreurs bornées, CIFA 2004, Confèrence Internationale Francophoned’Automatique, Novembre 2004, Douz, Tunisie.
Le but de cette communication est l’analyse des propriétés diélectriques de polymères à l’aide dumodèle d’Havriliak-Negami, dans un contexte à erreurs bornées. En règle générale, la structuredu modèle est inconnue. De plus, les données ne couvrent pas toujours tout le spectre defréquences. Les résultats habituellement obtenus par les techniques classiques des moindres carréset d’optimisation locale, peuvent alors être erronés. Dans cette communication, l’estimation desparamètres du modèle est obtenue de manière garantie par inversion ensembliste. Nousmontrerons que nous pourrons invalider un modèle lorsqu’il n’est pas compatible avec lesmesures. Par ailleurs, nous verrons aussi qu’il est parfois possible de réduire les temps de calcul,en utilisant une bonne stratégie de bissection avec l’algorithme de partitionnement. Les donnéesutilisées sont obtenues par simulation
[RIRC05] T. Raïssi, L. Ibos, N. Ramdani, Y. Candau, Analyse de spectres de relaxation diélectriquepar arithmétique d’intervalles, Revue Internationale de Génie Electrique 8(1):97-117, 2005.
Le but de ce papier est d’appliquer des outils ensemblistes à l’analyse des propriétés diélectriquesde polymères à l’aide du modèle d’Havriliak-Negami. L’estimation des paramètres du modèle estréalisée dans un contexte à erreurs bornées, permettant par rapport aux techniques classiques desmoindres carrés et d’optimisation locale de trouver toutes les solutions compatibles avec lesmesures. Pour identifier les paramètres diélectriques en utilisant des techniques d’optimisation parminimisation de critères, la structure du modèle doit être connue. Dans certains cas, cesinformations ne sont pas disponibles : par exemple les mesures ne couvrent pas tout le spectre ;dans ce cas, l’identification peut donner lieu à des résultats erronés. Dans ce papier nousprésentons une alternative permettant d’invalider le modèle lorsqu’il n’est pas compatible avec lesmesures.
[RRIC05] T. Raïssi, N. Ramdani, L. Ibos, Y. Candau (2005) A reliable method for the estimation ofdielectric relaxation models parameters, 5AI Int. Conf. Inverse Problems in Engineering:Theory, Practice, July 2005, Cambridge, UK.
In this paper, a guaranteed method for the estimation of dielectric relaxation model parameters ispresented. The only assumption used is that data uncertainty is bounded with known priorbounds. The main difference with classical methods based on least squares minimisation is that thesolution is not a point but leads to a set. When least squares methods are used, the model structureshould be known. In some cases, this information is not available (for instance because there is notenough data); in this case the identification process can lead to unacceptable results. In this paper,a new technique, based on interval analysis, allowing the rejection of models that are notconsistent with data is presented. When a solution exists, the guaranteed method provides anatural description of the uncertainty associated with the identified dielectric parameters.

Chapitre 5Méthodes ensemblistespour modèles à temps continu ;Estimation d’état et de paramètresDans ce chapitre, j'aborde la question de l'estimation des paramètres et de l'état d'un
système dans un contexte à erreurs bornées pour le cas des modèles non-linéaires à
temps continu.
5.1 Motivations
Alors qu’une grande classe de systèmes dynamiques sont naturellement décrits par des
équations différentielles, il n’existait que peu de solutions pour procéder à des
estimations garanties pour cette classe de problème. Dans le cadre de la thèse de Mr.
Raïssi [Raï04], nous avons contribué au développement de méthodes ensemblistes pour
l’estimation d’états et de paramètres pour des systèmes non-linéaires décrits par des
équations différentielles ordinaires (EDO).
Le lecteur pourra aussi consulter les publications [RRC04, Set membership state and
parameter estimation for systems described by nonlinear differential equations] et
[RRC05, Bounded-error moving horizon state estimator for non-linear continuous-time
systems : application to a bioprocess system] jointes en annexe de ce document.
Dans la suite, nous considérons un système décrit par des équations de la forme
=
=
∈ ∈
ɺ
0 0
0
,
,
t t
t t
t
x f p x
y g p x
x
p
X
P
( ) ( ( ))
( ) ( ( ))
( )(5.1)
où ∈0, t t T[ ] , ∈
-1kCf D( ) ,
+
⊆ ℝp
n n
D est un ensemble ouvert, 0P un domaine pour le
vecteur de paramètres ; n, m et np sont les dimensions (resp.) du vecteur d'état x, du
vecteur de sortie y et du vecteur de paramètres p. Les fonctions →:n
f D R et →:m
g D R
peuvent être linéaires ou non-linéaires, mais continûment différentiables k–1 fois. On
écartera donc de cette étude celles incluant par exemple les fonctions valeur absolue ou
58 Chapitre 5
signe. On suppose que le vecteur état initial x0 est inconnu mais appartient à un
domaine a priori 0
X . On suppose de plus, que les sorties ( )ty sont mesurées aux
instants ∈ …
1 2, , ,
i Nt t t t ⊆
0, t T[ ] .
Remarque 1 : Il n'est pas nécessaire que le pas d'échantillonnage des mesures soit
constant ; les instants ti peuvent être choisis de manière quelconque dans l'intervalle
0, t T[ ] .
Dans le contexte "erreur bornée", on suppose que les perturbations, prises additives sur
la sortie, sont inconnues mais bornées de borne connue : à chaque instant de mesure ti,
un domaine admissible Yi pour le vecteur des sorties est connu a priori, ce qui s'écrit
( )∀ ∈ = = ∈…
1 2, , , , ,
i N i i i it t t t t ty y g p x Y( ) ( ) (5.2)
Remarque 2 : Dans le cadre de nos travaux nous avons considéré qu'il n'y avait pas de
bruit d'état. Il est néanmoins possible d'ajouter un bruit borné dans l'équation d'état
mais au prix d'un accroissement du pessimisme lors des calculs ensemblistes.
Pour résoudre le problème de l'estimation de l'état et des paramètres de (5.1) avec la
condition (5.2), nous devons évaluer numériquement la sortie du modèle et donc le
vecteur d'état, aux instants de mesure ti. Pour réaliser cette évaluation numérique de
manière fiable et garantie et pour ne perdre aucune solution, nous utilisons l'intégration
numérique garantie par arithmétique d'intervalles.
5.2 Intégration numérique garantie d'équation différentielle
Le problème de la valeur initiale d'une équation différentielle ordinaire (EDO) non-
linéaire dont les conditions initiales sont définies sous la forme d’un ensemble de valeurs
possibles ou si l’EDO met en jeu des grandeurs décrites par des intervalles, peut être
résolue de manière fiable par des techniques d’intégration numérique garantie.
En effet, les techniques ponctuelles classiques de résolution d'équation différentielle
fournissent des approximations dont l'erreur globale n'est pas connue. Par ailleurs, la
propagation des incertitudes paramétriques ou dans les conditions initiales avec des
méthodes similaires à celles introduites dans le chapitre 1 par exemple, nécessiterait un
grand nombre de simulations de modèle, mais toujours sans garantie.
Au contraire, l’intégration numérique garantie permet de prouver l’existence et l’unicité
de la solution et si c’est le cas, de calculer un pavé intervalle contenant de manière
garantie la solution de l'EDO obtenue pour toute combinaison de valeurs prises par les

Méthodes ensemblistes pour modèles à temps continu 59
paramètres ou l'état initial.
1. Pour prouver l’existence et l’unicité de la solution, on utilisera le théorème du point
fixe de Brouwer et l’opérateur de Picard-Lindelöf [Moo66]. A l'issue de cette phase, on
obtient un encadrement (parfois très pessimiste) de la solution ainsi qu'une
évaluation du pas d'intégration, si on souhaitait une valeur pour ce pas de manière
adaptative.
2. Un encadrement réduit de la solution est ensuite obtenu de manière garantie par le
biais de formulations intervalles des développements en série de Taylor explicite
[Moo66], [Eij81], [Loh88] ou implicite [Rih98] ou de Hermite-Obreschkoff [Ned99]
[NJ99]. On peut aussi réduire la solution en associant des filtres polynomiaux de
Hermite avec des techniques de résolution globale de problèmes de satisfaction de
contraintes [JVD02].
Des mises en œuvres numériques de certaines de ces méthodes sont par ailleurs
disponibles, comme par exemple les logiciels AWA [Loh94], COSY [Ber97], [Mak98] et
VNODE [NJ02].
Remarque 3 : Dans la suite, nous considérons le système autonome. En fait, ceci n'est
pas restrictif car il est possible de transformer un système non autonome décrit par
( ) ( ),t t=x f xɺ , ( ) [ ]0 0t ∈x x (5.3)
en un système autonome en construisant un état étendu
[ ]Tt+
=x x avec 1
1n
x+
+=ɺ , ( )1 0 0n
x t t+
+= (5.4)
Lorsque l'entrée du système est obtenue par échantillonnage, on doit procéder à une
interpolation par le biais de fonctions d'interpolation continûment dérivables à l'ordre
k–1.
Remarque 4 : Si le vecteur de paramètres est défini par un pavé intervalle, c'est-à-dire
que l'équation d'état est définie par
( ) ( ),t =x f x pɺ , ( ) [ ]0 0t ∈x x , [ ]∈p p (5.5)
il est préférable de construire un vecteur d'état étendu
[ ]Tp=x x p avec 0
p
n ix+=ɺ , ( ) [ ]0
p
n i ix t p+
∈ (5.6)
pour mieux contrôler la qualité (ici au sens du pessimisme) de l'estimation.

60 Chapitre 5
Remarque 5 : L’utilisation de ces techniques lorsque le vecteur paramètres de l’EDO est
décrit par un pavé intervalle de taille significative conduit parfois à des résultats très
pessimistes. Une solution à ce problème peut parfois être apportée en utilisant la
propriété de coopérativité, qui permet d’obtenir des fonctions d’inclusions pour l’EDO
[GRH00], [HG01], [WK03].
5.3 Intégration numérique garantie par modèles de Taylor
On considère l’équation différentielle suivante :
( ) ( )( ) ( ), j jt t t= =x f x x xɺ (5.7)
Connaissant la solution xj à l’instant tj, on pourra déduire la solution xj+1 à l’instant tj+1,
par le développement de Taylor suivant :
[ ] ( ) [ ] ( )( )ξ
−
+
=
= + +∑11
1
ki ki k
j j j
i
h h tx x f x f x (5.8)
où hj = tj+1 – tj est le pas de discrétisation, qui n’est pas nécessairement constant et où
( )ξtx est la solution de (5.7) à un instant ξ + ∈ 1, .j jt t t Les coefficients de Taylor sont
obtenus par différentiation automatique [RC96] et la relation récursive suivante :
[ ]1
[ 1]
[ ]
d1 , 2
dx
i
ii
i
−
=
= ≥
f f
ff f
(5.9)
Dans notre étude, l’état initial xj n’est pas parfaitement connu, il appartient à un pavé.
Pour résoudre ce problème, l’équation (5.8) est étendue au cas des intervalles, en
cherchant une fonction d’inclusion pour (5.8). La première difficulté consiste à calculer le
terme « reste » dans (5.8). Pour avoir une solution garantie, on ne peut pas se contenter
d’une approximation ponctuelle pour ( )ξtx , il faut trouver un ensemble contenant ( )ξtx .
Cependant, il suffira de prendre comme ensemble toute la trajectoire entre tj et tj+1, cette
approximation notée ici [ ]ξ , pouvant être considérée comme une solution a priori pour
(5.7) à l’instant tj+1. Le développement de Taylor dans le cas des intervalles s’écrit alors:
[ ] ( ) [ ] [ ]( )−
+
=
= + + ∑11
1
ki ki k
j j j
i
h hx x f x f ξ (5.10)
En conclusion, trois étapes seront nécessaires pour résoudre (5.7) :
1. prouver l’existence et l’unicité de la solution
2. donner une solution a priori

Méthodes ensemblistes pour modèles à temps continu 61
3. réduire le pessimisme
Pour montrer l’existence et l’unicité de la solution à un instant tj+1 pour l’ensemble des
états initiaux à l’instant tj, nous utilisons le théorème du point fixe (dit théorème de
Brouwer) et l’opérateur de Picard-Lindelöf. Pour réduire le pessimisme de la solution a
priori, nous utiliserons (5.8) mais avec des formulations spécifiques.
Remarque 6 : Il est intéressant de noter que dans les méthodes classiques ponctuelles
d'approximations de la solution d'équations différentielles, on préfère utiliser les
méthodes de Runge-Kutta car elles ne nécessitent pas le calcul des dérivées de la
fonction f, alors même que les méthodes de Taylor présentent un réel avantage
puisqu'elle permettent une évaluation simple de l'erreur de troncature. Néanmoins, une
extension aux intervalles des méthodes de Runge-Kutta conduirait à l'évaluation de
somme d'intervalles. Or, nous savons que la largeur de la somme d'intervalles et la
somme des largeurs d'intervalles, les résultats ainsi obtenus seraient rapidement
inexploitables. C'est ce qui explique le fait que l'extension des méthodes de Runge-Kutta
aux intervalles a été rarement étudiée.
5.3.1 Existence et unicité de la solution
Théorème (du point fixe) : On considère un espace métrique complet non vide X muni
d’une distance d. Soit :Φ →X X . Si Φ satisfait une condition de Lipschitz
( ) ( )( ) ( )γΦ Φ ≤, ,d dx y x y (5.11)
pour tout x et y ∈ X, et γ≤ <0 1 , alors Φ possède un et un seul point fixe.
Définition : Soit U un ensemble de fonctions continues, l’opérateur Φdéfini par :
( )( ) ( )( )τ τ τΦ = + ∫ ,
j
t
jt
t du u f u (5.12)
avec ( )t ∈u U définie sur ( )+ = 1, , j j j jt t tu u , est appelé opérateur de Picard–Lindelöf.
Propriété : Soit u le point fixe de l’opérateur de Picard–Lindelöf Φ , alors :
( ) ( ) ( )( )τ τ τΦ = ⇔ = + ∫ ,
j
t
jt
t du u u u f u (5.13)
On dérive u(t) dans (5.13) par rapport au temps, par suite :
( ) ( ) ( )( )Φ = ⇔ =ɺ
ɺ ɺt t tu u f u (5.14)
on constate d’après (5.14) que le point fixe de Φ est la solution de l’équation

62 Chapitre 5
différentielle (5.7).
5.3.2 Solution a priori
Il s’agit ici de calculer une solution a priori [ ]ξ pour (5.7). Le pavé [ ]ξ contient
l’ensemble des points fixes de Φ entre tj et tj+1, ssi
[ ]( ) [ ]Φ ⊆ξ ξ (5.15)
Proposition 1 : On considère l’équation différentielle (5.7), soient +
= −1j j jh t t et
j[ ] ⊆x Dɶ tels que :
⋅ ⊆ɶ ɶ + [0, ] ([ ]) [ ]j j j jhx f x x (5.16)
alors le pavé [ ]ɶ
jx contient toute la trajectoire de x(t), solution de l’équation différentielle
(5.7), entre tj et tj+1.
Preuve : Supposons que l’inclusion (5.16) est vérifiée ; soit U l’ensemble des fonctions
continues sur +1
[ , ]j jt t et à valeurs dans le pavé [ ]ɶ
jx :
( ) 0
1 1| [ , ] et [ , ], ( )j j j j jC t t t t t t
+ += ∈ ∀ ∈ ∈[ ]u u u xU ɶ (5.17)
En appliquant l’opérateur de Picard-Lindelöf à une fonction ∈u U , on obtient :
( )( ) ( ( )) ( ) ( ) [0, ] ( )j j
t t
j j j j j j jt t
t s ds t ds h= + = ∈ + [ ] ⊆ + ⋅ [ ] ⊆ [ ]∫ ∫T u x f u x x f x x f x xɶ ɶ ɶ (5.18)
On constate alors d’après (5.18) que :
∀ ∈u U , ( ) ∈ [ ]ɶ( ) jtT u x (5.19)
Et comme ( )+
∈ ([ ])0
1( ) ,j jt C t tT u , alors :
( ) ⊆T U U (5.20)
L’opérateur de Picard-Lindelöf est alors contractant et possède un seul point fixe dans
U . D’autre part, on sait que le point fixe de l’opérateur de Picard-Lindelöf est solution de
l’équation différentielle (5.7) pour +
∈1
[ , ]j jt t t avec jx comme condition initiale. On peut
donc déduire que le pavé ɶ[ ]x contient toute la trajectoire de la solution de (5.7) pour
+∈
1[ , ]j jt t t .
Proposition 2 : Supposons maintenant que dans (5.7), l’état initial x(tj) n’est pas connu
d’une manière exacte mais ∈[ ]( )j jtx x ; dans ce cas un pavé ɶ[ ]x vérifiant l’inclusion
suivante :
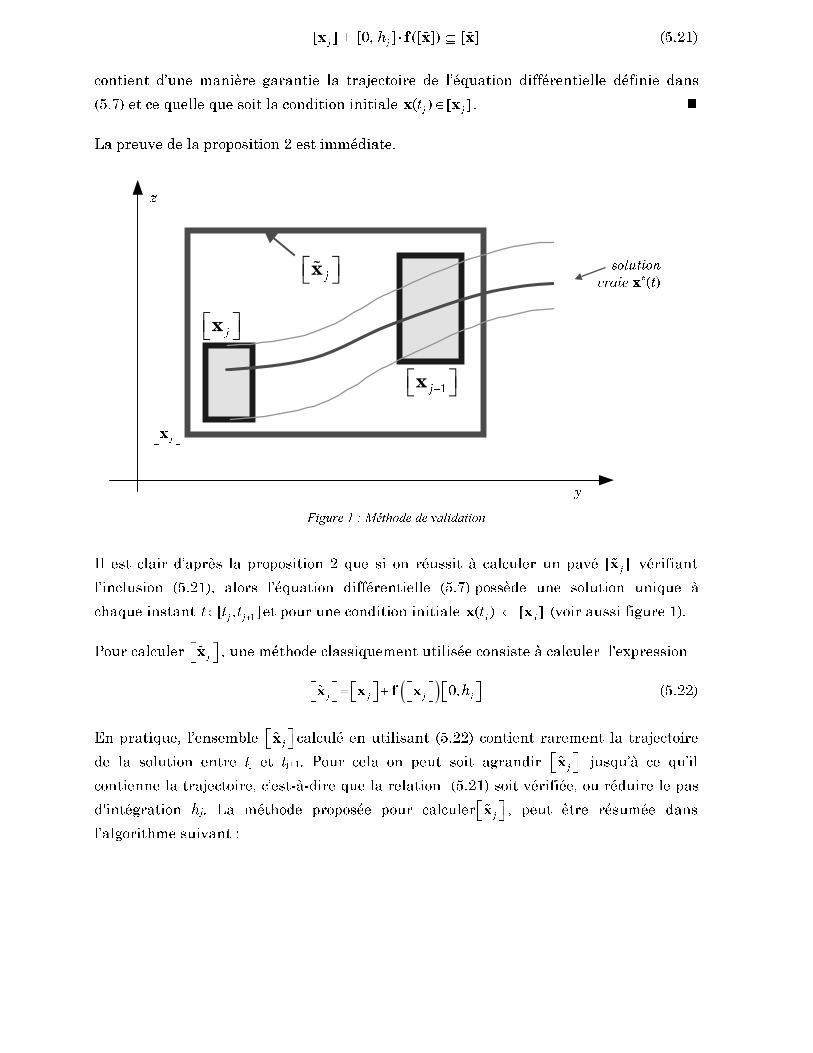
Méthodes ensemblistes pour modèles à temps continu 63
[ ] ⋅ ⊆ɶ ɶ + [0, ] ([ ]) [ ]j jhx f x x (5.21)
contient d’une manière garantie la trajectoire de l’équation différentielle définie dans
(5.7) et ce quelle que soit la condition initiale ∈[ ]( )j jtx x .
La preuve de la proposition 2 est immédiate.
j x
j x
1j+ x
j xɶ
Figure 1 : Méthode de validation
Il est clair d’après la proposition 2 que si on réussit à calculer un pavé ɶ[ ]jx vérifiant
l’inclusion (5.21), alors l’équation différentielle (5.7) possède une solution unique à
chaque instant +
∈1
[ , ]j jt t t et pour une condition initiale ∈ [ ]( ) j jtx x (voir aussi figure 1).
Pour calculer ɶ
jx , une méthode classiquement utilisée consiste à calculer l'expression
( ) 0,j j j jh = + x x f xɶ (5.22)
En pratique, l’ensemble ɶ
jx calculé en utilisant (5.22) contient rarement la trajectoire
de la solution entre tj et tj+1. Pour cela on peut soit agrandir ɶ
jx jusqu’à ce qu’il
contienne la trajectoire, c’est-à-dire que la relation (5.21) soit vérifiée, ou réduire le pas
d'intégration hj. La méthode proposée pour calculer ɶ
jx , peut être résumée dans
l’algorithme suivant :
y
z
solution
vraie x*(t)

64 Chapitre 5
Algorithme : enclosure (entrée : jx , h, α ; sortie : ɶ
jx )
1. Initialisation: [ ] ( ): 0,j j jh = + x x f xɶ ;
2. tant que ( [ ] ( ) + ⊄ ɶ ɶ0,j j jhx f x x )
3. [ ]α α + − ɶ ɶ ɶ:= ,j j jx x x
fin
Remarque 7 : Dans l'algorithme enclosure la valeur absolue d'un vecteur intervalle est
un vecteur défini par : [ ] =max ,i iu uu .
Remarque 8 : La précision et le temps du calcul de ɶ
jx dépend évidement du choix de
la valeur de α. Le temps de calcul sera d'autant plus long que α est petit.
Remarque 9 : L'algorithme enclosure ci-dessus est une version simplifiée d'algorithmes
de validation plus complexes permettant de déterminer simultanément la solution a
priori ɶ
jx et le pas d'intégration optimal hj. On peut aussi améliorer la performance de
l'algorithme en remplaçant l'opérateur de Picard-Lindelöf par un développement de
Taylor d'ordre élevé [Ned99], [NJP01].
Remarque 10 : La solution a priori ɶ
jx peut encore être réduite en utilisant la
propriété (5.21), c'est-à-dire le fait que l'opérateur de Picard-Lindelöf agit comme un
contracteur sur le domaine ɶ
jx . Une version modifiée de l'algorithme enclosure pourrait
être :
Algorithme : enclosureC (entrée : jx , h, α ; sortie : ɶ
jx )
1. Initialisation: [ ] ( ): 0,j j jh = + x x f xɶ ;
2. tant que ( [ ] ( ) + ⊄ ɶ ɶ0,j j jhx f x x )
3. [ ]α α + − ɶ ɶ ɶ:= ,j j jx x x
fin
4. [ ] ( )0
0,j j jh = + x x f xɶ ɶ
5. tant que (0
j j x xɶ ɶ )
6.0
:=j j x xɶ ɶ
7. [ ] ( )0
: 0,j j jh = + x x f xɶ ɶ
fin
8.0
:j j = x xɶ ɶ
fin
Remarque 11 : Dans l'algorithme enclosureC, le test0
j j x xɶ ɶ vérifie que le pavé
0
j xɶ est contenu dans l'intérieur du pavé j
xɶ , ce qui revient à vérifier que la

Méthodes ensemblistes pour modèles à temps continu 65
contraction effectuée par l'opérateur de Picard-Lindelöf est significative.
5.3.3 Réduction de la solution à l'aide de méthodes explicites
La solution a priori j xɶ est en fait une approximation du premier ordre : elle est
connue pour son pessimisme. Pour réduire ce pessimisme, on utilisera un développement
de Taylor donné par (5.10) (où [ ]ξ = ɶ
jx ). Par conséquence, la solution à l’instant tj+1 est
donnée par :
[ ] ( ) [ ] ( )−
+
=
= + + ∑ ɶ
1
1
1
ki ki k
j j j j
i
h hx x f x f x (5.23)
On remarque que la taille des vecteurs intervalles dans (5.23) est strictement croissante,
par conséquent ce schéma explicite divergera après quelques pas d’intégration. Plusieurs
auteurs se sont intéressés à la réduction du pessimisme de la méthode directe (5.23) en
utilisant des formulations spécifiques.
On utilise en premier lieu la forme centrée pour les coefficients de Taylor, soit :
[ ] ( ) [ ] ( ) [ ]( ) ( )ˆ ˆ J ; - i i i
j j j j j = + f x f x f x x x (5.24)
où [ ]( )J ;i
j f x est une fonction d’inclusion du Jacobien du ième coefficient de Taylor et
ˆ
jx un point appartenant au pavé jx . Si les termes hors diagonale du Jacobien des
coefficients de Taylor sont négatifs, ce schéma peut fournir des encadrements de la
solution de l'EDO de taille non croissante [AH83], [Eij81], [Loh87], [Rih94].
En utilisant (5.24), l'équation (5.23) devient
( ) ( ) ( ) ( )1 1
[ ] [ ] [ ]
1
1 1
ˆ ˆ ˆ -
k k
i i k k i i
j j j j j j j j j j
i i
h h h
− −
+
= =
= + + [ ] + + ;[ ] [ ]
∑ ∑x x f x f x I J f x x xɶ (5.25)
et on obtient alors l'algorithme Mean value suivant
Algorithme Mean Value (entrée : j x , ˆ
jx , hj, j xɶ ; sortie :
1j+ x ,
1ˆ
j+x )
1. [ ] ( ) [ ] ( )1
1
1
ˆ ˆ
ki ki k
j j j j j j
i
h h
−
+
=
= + ⋅ + ⋅ [ ] ∑v x f x f xɶ ;
2. [ ]( )1
1
;
ki
j j
i
−
=
= + [ ]
∑S I J f x ;
3. ( )1 1ˆ - j j j j j+ +
= + [ ] x v S x x
4. ( ) ( )1 1 1ˆ
j j jm m+ + +
= = [ ] x v x ;
La ligne 1 de l'algorithme utilise des intervalles dégénérés pour évaluer le
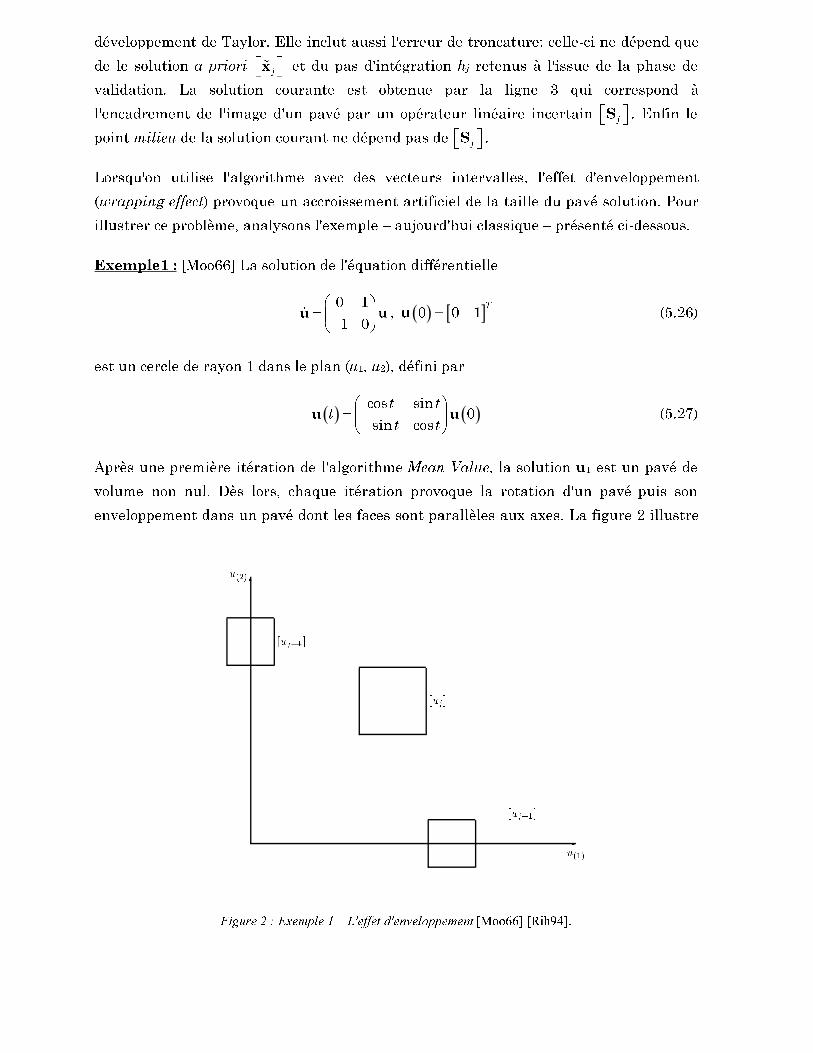
66 Chapitre 5
développement de Taylor. Elle inclut aussi l'erreur de troncature: celle-ci ne dépend que
de le solution a priori j xɶ et du pas d'intégration hj retenus à l'issue de la phase de
validation. La solution courante est obtenue par la ligne 3 qui correspond à
l'encadrement de l'image d'un pavé par un opérateur linéaire incertain j S . Enfin le
point milieu de la solution courant ne dépend pas de j S .
Lorsqu'on utilise l'algorithme avec des vecteurs intervalles, l'effet d'enveloppement
(wrapping effect) provoque un accroissement artificiel de la taille du pavé solution. Pour
illustrer ce problème, analysons l'exemple – aujourd'hui classique – présenté ci-dessous.
Exemple1 : [Moo66] La solution de l'équation différentielle
0 1
1 0
=
− u uɺ , ( ) [ ]0 0 1
T
=u (5.26)
est un cercle de rayon 1 dans le plan (u1, u2), défini par
( ) ( )cos sin0
sin cos
t tt
t t
=
− u u (5.27)
Après une première itération de l'algorithme Mean Value, la solution u1 est un pavé de
volume non nul. Dès lors, chaque itération provoque la rotation d'un pavé puis son
enveloppement dans un pavé dont les faces sont parallèles aux axes. La figure 2 illustre
-
6
u(1)
u(2)
[uj1]
.
................................................................................................................................................................
..
.......................................................................................................................
..
...............................................................................
..
.......................................
.
........................................................................................................................
.
................................................................................
.
..
..
....................................
[uj ]
..
..
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................
..
.................................................................................................................................................................
.........................................................................................................................
..................................................................................
..........................................
.........................................................................................................................
..................................................................................
..........................................
[uj+1].................................................................................................................................................................
.........................................
.................................................................................
..........................................................................................................................
........................................
..
...............................................................................
.........................................................................................................................
....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
..
.
.............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
Figure 2 : Exemple 1 – L'effet d'enveloppement [Moo66] [Rih94].

Méthodes ensemblistes pour modèles à temps continu 67
ce phénomène : la taille du pavé solution croit de manière exponentielle alors que la
taille de la vraie solution ne change pas!
Différentes méthodes ont été proposées pour juguler le pessimisme introduit par le
phénomène d'enveloppement. Une première solution fournie dans [Moo66] consiste à
utiliser des pavés dont les faces ne sont pas parallèles avec les axes des composantes du
vecteur d'état. D'autres techniques ont ensuite été proposées et ont permis de contrôler
le pessimismes dans certains cas (on peut lire par exemple à ce sujet l'étude
bibliographique dans [Rih94]). Dans la suite, je détaille les méthodes les plus
performantes : celle de Lohner [Loh87], implémentée dans le solveur AWA et celle de
Rihm [Rih94], que nous avons utilisée dans le cadre de nos travaux.
5.3.3.1 Méthode de Lohner
Dans [Loh87],[Loh88], la solution à l'instant tj+1 est écrite sous la forme
+ + + + + + = + ∈ 1 1 1 1 1 1
ˆ |j j j j j jx x A r r r (5.28)
où +1
ˆ
jx est le centre du pavé obtenu en évaluant la relation (5.23) avec le centre de jx .
+1jA est une matrice ponctuelle et +1
[ ]jr un pavé. L'idée générale de la méthode est de ne
pas tenter d'envelopper un ensemble de la forme
( ) [ ] [ ], : |= ∈ ⊆A r Ar r r A r (5.29)
dans le pavé [ ]A r . La figure 3 montre le pessimisme introduit si on procédait de la
sorte.
y
fr j r 2 [r]g
fAr j r 2 [r]g
A [r]y
Figure 3 : Effet d'enveloppement [Ned99]

68 Chapitre 5
On peut donc résumer la méthode de Lohner dans l'algorithme suivant
Algorithme : méthode de Lohner
(entrée : jh , j xɶ , j
x , j r , jA ; sortie :
1j+ x ,
1j+ r ,
1j+A )
1. [ ] ( )1
kk
j j jh
+ = z f xɶ
2. ( )1 1j jm+ +
= s z
3. [ ] ( )1
1 1
1
ˆˆ ˆ ˆ
kii
j j j j j
i
h
−
+ +
=
= + ⋅ +∑x x f x s
4. [ ]( )1
1
;
ki
j j
i
−
=
= + [ ]
∑S I J f x
5. choisir la matrice 1j+A (voir ci-dessous)
6. ( ) ( )( )1 1
1 1 1 1 1j j j j j j j j
− −
+ + + + +
= [ ] + − r A S A r A z s
7. 1 1 1 1
ˆ
j j j j+ + + + = + x x A r
On notera donc que l'on ne propage pas l'enveloppement réalisé à la ligne 7, mais plutôt
le pavé r, image réciproque de x par l'opérateur linéaire défini par A. Par ailleurs,
comme un effet d'enveloppement est malgré tout introduit à la ligne 6, la performance de
la méthode dépend évidemment du choix de la matrice +1jA , en particulier on essaiera de
satisfaire la condition
( )1
1j j j
−
+
≈ A S A I (5.30)
dès lors le phénomène d'enveloppement sera fortement réduit puisque la ligne 6 sera
approximativement égale à
( )1
1 1 1 1j j j j j
−
+ + + +
≈ [ ] + − r r A z s (5.31)
Il reste à déterminer la matrice +1jA . Deux méthodes ont été proposées pour déterminer
cette matrice :
A) La méthode parallélépipédique [Eij81]; [Loh88] dans laquelle on écrit
( )1j j jm+
= A S A (5.32)
B) Par factorisation QR [Loh88] qui consiste à procéder à une factorisation QR de la
manière suivante :
1. choisir 1j j j+
∈ A S Aɶ
2. permutation: 1 1 1
ˆ
j j j+ + +=A A Pɶ
3. factorisation QR: 1 1 1
ˆ
j j j+ + +→A Q R
4. choisir la nouvelle matrice: 1 1j j+ +=A Q (5.33)

Méthodes ensemblistes pour modèles à temps continu 69
La méthode implémentée dans le solveur AWA pour évaluer ces matrices utilise la
factorisation QR.
5.3.3.2 La méthode de Rihm : La méthode de la valeur moyenne étendue
Dans [Rih94], le problème de l'enveloppement est résolu par un pré-conditionnement des
matrices. C’est l’algorithme E.M.V. (Extended Mean Value), suivant :
Algorithme : E.M.V. ( entrées : ɶ
jx[ ] , jx[ ] , j
x , j
v[ ] , j
p[ ] , j
A , hj,
sorties : +1jx[ ] ,
+1jx ,
+1jv[ ] ,
+1jp[ ] ,
+1jA )
1. +
=
= + +∑ ɶ
-1
1
1
ˆ ˆ
k
i i k k
j j j j
i
h hv x f x f x[ ] [ ][ ] ( ) ([ ])
2.
−
=
= + ∑11
;
k
i i
j j
i
hS I J f x[ ][ ] ( [ ])
3. +
= +1
ˆ j j j j j j jq S A p S v x[ ] ([ ] )[ ] [ ]([ ] - )
4. + + +
= +1 1 1
j j jx v q[ ] [ ] [ ]
5. +=
1 j j jmA S A([ ] ) ou factorisation QR
6. − −
+ + +
= +1 1
1 1 1ˆ -j j j j j j j j jp A S A p A S v x[ ] ([ ] )[ ] ( [ ])([ ] )
7. + +
=1 1
ˆ j jmx v([ ]) ;
La méthode de Rihm utilise l'une des deux méthodes proposées par Lohner pour choisir
la matrice 1j+A . En comparant la méthode de Lohner et celle de Rihm on peut constater
qu'elles fournissent une même expression pour le point milieu 1
ˆ
j+x . La différence porte
donc seulement sur le contrôle du phénomène d'enveloppement et donc sur la taille
finale du pavé solution 1j+x[ ] .
Rihm a comparé sa méthode avec celle de Lohner dans [Rih94] : les résultats obtenus
montrent qu'elle fournit des encadrements de plus petite taille. Les points milieux étant
bien évidemment les mêmes. Il n'y a pas à ma connaissance, de résultat général sur la
supériorité de l'une ou l'autre de ces méthodes.
En pratique, les méthodes de Rihm et de Lohner, ainsi que les deux approches pour
choisir les matrices 1j+A devraient être utilisées en collaboration.
5.4 Autres méthodes d'intégration numérique garantie
5.4.1 Méthode de Taylor implicite
Les solutions obtenues par la méthode de Lohner ou de Rihm pourraient être encore
réduites en utilisant un développement de Taylor intervalle sous forme implicite [Rih98],
c'est à dire en écrivant une relation similaire à (5.23) pour la solution à l'instant tj+1,

70 Chapitre 5
comme suit
[ ] ( ) ( ) [ ] ( ) ( )−
+ +
=
= + − + − ∑ ɶ
1
1 1
1
ki ki k
j j j j
i
h hx x f x f x (5.34)
Notons que le terme reste utilisé dans (5.34) est le même que celui utilisé dans (5.23). La
contraction du domaine +
1jx est obtenu en utilisant par exemple, le contracteur de
Newton ou de Krawzcyk [JKDW01].
5.4.2 Méthode de Hermite-Obreschkoff
On attribue souvent le développement en série d'Hermite-Obreschkoff (avec des
variables ponctuelles) à Darboux [Dar1876] et Hermite [Her1878]. Elle s'écrit
( ) [ ] ( ) [ ] ( ) ( ) ( )[ ] ( )
( )ξ
+ +
+ +
+
= =
− = + −
+ + +
∑ ∑1
, , 1
1
0 0
! !1 1
! 1 !
p qq p
i qi iq p i p q i p q
i j j i j j j
i i
tq pc h c h h
p q p q
x
f x f x (5.35)
avec ( )( )( )+ −
=
+ −
,
!!
! !
n m
i
n m inc
m n n i(5.36)
et ≥ 0p , ≥ 0q et ≤ ≤0 i q , et où la fonction f est au moins + +1p q fois continûment
différentiable.
Cette méthode est utilisée en analyse numérique (cas ponctuel avec une implémentation
virgule flottante), pour résoudre des EDOs correspondant à des systèmes raides. Elle a
été étendue au intervalles dans [Ned99] [NJ99] afin d'apporter une amélioration aux
méthodes de Taylor. On peut noter que selon le choix des entiers p et q, on peut se
ramener à un modèle de Taylor explicite (q = 0, p > 0) ou implicite (p = 0, q > 0).
L'implémentation numérique de cette méthode nécessite néanmoins des précautions
similaires à celles des méthodes de Taylor : forme centrée pour les coefficients de Taylor,
pré-conditionnement des matrices .... Elle est implementée dans le logiciel VNODE
[Ned99].
5.5 Estimation d'état
Dans cette partie, nous considérons que le vecteur des paramètres p dans (5.1) est
parfaitement connu. Notre objectif est d'estimer le vecteur d'état ( )tx aux instants de
mesure ∈ …
1 2, , ,
i Nt t t t , de sorte que la condition (5.2) soit vérifiée.

Méthodes ensemblistes pour modèles à temps continu 71
5.5.1 Estimateur causal
Pour réaliser l'estimation d'état dans un contexte causal, ou en – ligne par exemple, nous
avons construit un algorithme fondé sur une approche prédiction – correction classique.
L'étape de prédiction calcule l'ensemble atteignable pour le vecteur d'état puis l'étape de
correction en élimine toutes les parties inconsistantes avec le domaine admissible pour
les sorties (domaine fixé a priori).
Notre contribution concerne l'étape de prédiction : nous utilisons un développement de
Taylor explicite d'ordre élevé implémenté par le biais de l'algorithme E.M.V. décrit dans
la section 5.3.3.2. En notant +1jy[ ] l'ensemble admissible pour les sorties
+1jY , on obtient
l'algorithme suivant [RRC04] :
Algorithme
Estimateur causal ( )α… …
0 0 1: , , , , , , : , ,
N Nentrées h sortiesx y y x x[ ] [ ] [ ] [ ] [ ]
1. ( )0 0ˆ mx x = [ ] ,
0 0v x[ ] = [ ] ,
0p 0[ ] = ,
0=A I ;
2. pour j = 0 à N-1,
3. Prediction : E.M.V. ( entrées: jx[ ] , j
x , j
v[ ] , j
p[ ] , j
A , h, α ,
sorties : +1jx
+[ ] , +1j
x , +1j
v[ ] , +1j
p[ ] , +1j
A )
4. Correction : −
+ + +
= ∩1
1 1 1j j jx x g y+[ ] [ ] ([ ]) ;
5. fin
Remarque 12 : Dans l'étape de prédiction, il est possible d'utiliser un algorithme
d'intégration numérique garantie autre que l'algorithme E.M.V. De plus, il n'est pas
nécessaire que le pas d'intégration soit égal au pas d'échantillonnage des mesures ; on
procéderait dans ce cas à plusieurs étapes de prédiction sans étape de correction.
5.5.2 Estimateur non-causal
Dans un contexte hors – ligne ou en présence d'état initial incertain, il peut être
intéressant d'utiliser un estimateur non-causal. On suppose donc que toutes les mesures
sont disponibles.
Il suffit de traiter ce problème comme un problème de satisfaction de contraintes. Puis de
réaliser une extension au temps continu de l'algorithme proposé dans [JKDW01, pp.182].
On obtient :

72 Chapitre 5
Algorithme
Estimateur non causal ( )α… …
0 0 0: , , , , , , : , ,
N Nentrée h sortiesx y y x x[ ] [ ] [ ] [ ] [ ]
1. Répéter
2. Propagation dans le sens direct :
3. Pour j = 0 à N – 1, −
+ +
= ∩1
1 1,j j jt EMV t hx x g y[ ( )] ([ ( )] ) ([ ])
4. Propagation dans le sens rétrograde :
5. Pour j = N – 1 à 0, −
+
= − ∩1
1,j j jt EMV t hx x g y[ ( )] ([ ( )] ) ([ ])
6. jusqu'à (il n'y a plus d'amélioration)
Remarque 13 : Les arguments de l'algorithme E.M.V. ont été simplifié pour alléger
l'écriture.
Remarque 14 : L'algorithme Estimateur non causal permet de contracter (réduire) le
domaine 0
x[ ] associé à l'état initial. Il est donc possible de traiter des problèmes pour
lesquels l'état initial est mal connu. Cependant, lorsque la taille (volume) du domaine
0x[ ] est très grande, il peut être nécessaire de procéder à des bissections.
5.5.3 Estimateur d'états à horizon glissant
Une stratégie couramment mise en œuvre pour estimer un vecteur d'état en tenant
compte de tout ou partie des données expérimentales consiste à formuler le problème
comme la minimisation d'un critère quadratique. L'utilisation de toutes les données
disponibles (même en – ligne) accroît continuellement la complexité numérique de
l'optimisation. Une solution consiste alors à ne traiter qu'une fraction des données les
plus récentes : celles contenues dans un horizon temporel glissant.
Nous avons revisité ce concept dans le contexte erreur bornée et pour des modèles à
temps continu. L'estimation sur un horizon de taille N est obtenu par l'algorithme ci-
dessous [RRC05]. Lorsqu'une nouvelle donnée est disponible, il suffit de faire glisser la
fenêtre temporelle.
Algorithme Estimateur sur un horizon de taille N
( )α− − − −
… …
1 1: , , , , , , , , , :
k N k k N k k kentrée h sortiesx x y y y x[ ] [ ] [ ] [ ] [ ] [ ]
1. Répéter
2. Propagation dans le sens direct :
3. Pour j = k – N à k – 1, −
+ +
= ∩1
1 1,j j jEMV hx x g y[ ] ([ ] ) ([ ])
4. Propagation dans le sens rétrograde :
5. Pour j = k – 1 à k – N,−
+
= − ∩1
1,j j jt EMV t hx x g y[ ( )] ([ ( )] ) ([ ])
6. jusqu'à (il n'y a plus d'amélioration)
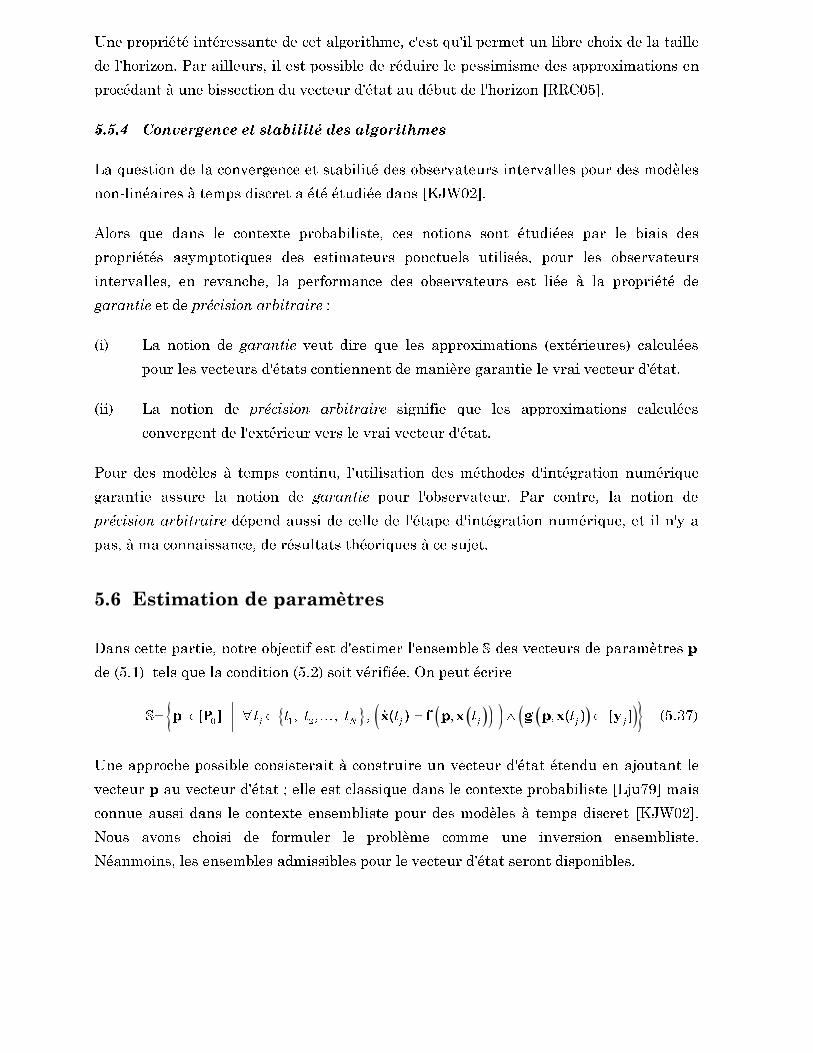
Méthodes ensemblistes pour modèles à temps continu 73
Une propriété intéressante de cet algorithme, c'est qu'il permet un libre choix de la taille
de l'horizon. Par ailleurs, il est possible de réduire le pessimisme des approximations en
procédant à une bissection du vecteur d'état au début de l'horizon [RRC05].
5.5.4 Convergence et stabilité des algorithmes
La question de la convergence et stabilité des observateurs intervalles pour des modèles
non-linéaires à temps discret a été étudiée dans [KJW02].
Alors que dans le contexte probabiliste, ces notions sont étudiées par le biais des
propriétés asymptotiques des estimateurs ponctuels utilisés, pour les observateurs
intervalles, en revanche, la performance des observateurs est liée à la propriété de
garantie et de précision arbitraire :
(i) La notion de garantie veut dire que les approximations (extérieures) calculées
pour les vecteurs d'états contiennent de manière garantie le vrai vecteur d'état.
(ii) La notion de précision arbitraire signifie que les approximations calculées
convergent de l'extérieur vers le vrai vecteur d'état.
Pour des modèles à temps continu, l'utilisation des méthodes d'intégration numérique
garantie assure la notion de garantie pour l'observateur. Par contre, la notion de
précision arbitraire dépend aussi de celle de l'étape d'intégration numérique, et il n'y a
pas, à ma connaissance, de résultats théoriques à ce sujet.
5.6 Estimation de paramètres
Dans cette partie, notre objectif est d'estimer l'ensemble S des vecteurs de paramètres p
de (5.1) tels que la condition (5.2) soit vérifiée. On peut écrire
( )( )( ) ( )( ) = ∈ ∀ ∈ = ∧ ∈P ɺ…0 1 2
, , , , , ,j N j j j jt t t t t t tp x f p x g p x yS [ ] ( ) ( ) [ ] (5.37)
Une approche possible consisterait à construire un vecteur d'état étendu en ajoutant le
vecteur p au vecteur d'état ; elle est classique dans le contexte probabiliste [Lju79] mais
connue aussi dans le contexte ensembliste pour des modèles à temps discret [KJW02].
Nous avons choisi de formuler le problème comme une inversion ensembliste.
Néanmoins, les ensembles admissibles pour le vecteur d'état seront disponibles.

74 Chapitre 5
L'inversion ensembliste est effectuée par l'algorithme SIVIA. Pour cela, il suffit de
définir le test d'inclusion [RRC04]:
• Pour prouver qu'un pavé [p] est acceptable (faisable) il suffit de vérifier que
∀ ∈ ⊆…
1 2, , , ,,j N j jt t t t g p x y([ ] [ ]) [ ] (5.38)
• Pour prouver qu'un pavé [p] est inacceptable (non faisable) il suffit de vérifier que
∃ ∈ ∩ =∅…
1 2, , , , ,j N j jt t t t g p x y([ ] [ ]) [ ] (5.39)
où [xj] est la solution de l'équation différentielle apparaissant dans (5.1) à l'instant de
mesure tj, obtenue par intégration numérique garantie.
5.7 Etudes de cas
Nous avons évalué nos algorithmes d'estimation sur deux cas tirés de la littérature et
avec des données simulées :
(i) Concurrence de population Lotka-Volterra [RRC04] ; et
(ii) Bio-procédé [RRC05].
5.7.1 Concurrence de populations, le modèle de Lotka-Volterra
C'est un modèle non linéaire utilisé pour décrire la concurrence entre deux populations
(proies – prédateurs par exemple). L'équation d'état a la forme suivante :
[ ] [ ] ( )= − −ɺ ɺɺ ≜ ≜1 2 1 2 1 2 1 2
, 1 , 1 ,T T
x x p x x p x xx f p x( ) ( ) (5.40)
L'équation d'observation est donnée par
( )= ≜1
,y g xp x (5.41)
Nous supposons que l'équation d'état est sans bruit et que les erreurs additives sur la
sortie sont inconnues mais bornées de bornes connues. Le domaine admissible pour la
sortie est pris comme suit
[ ]= + −ˆ 1.5,1.5i i
yY (5.42)
avec ˆ
iy une pseudo-mesure obtenue par simulation et ajout de bruit numérique. L'ordre
du développement de Taylor est fixé à 4.
Les résultats que nous avons obtenus peuvent se résumer comme suit :
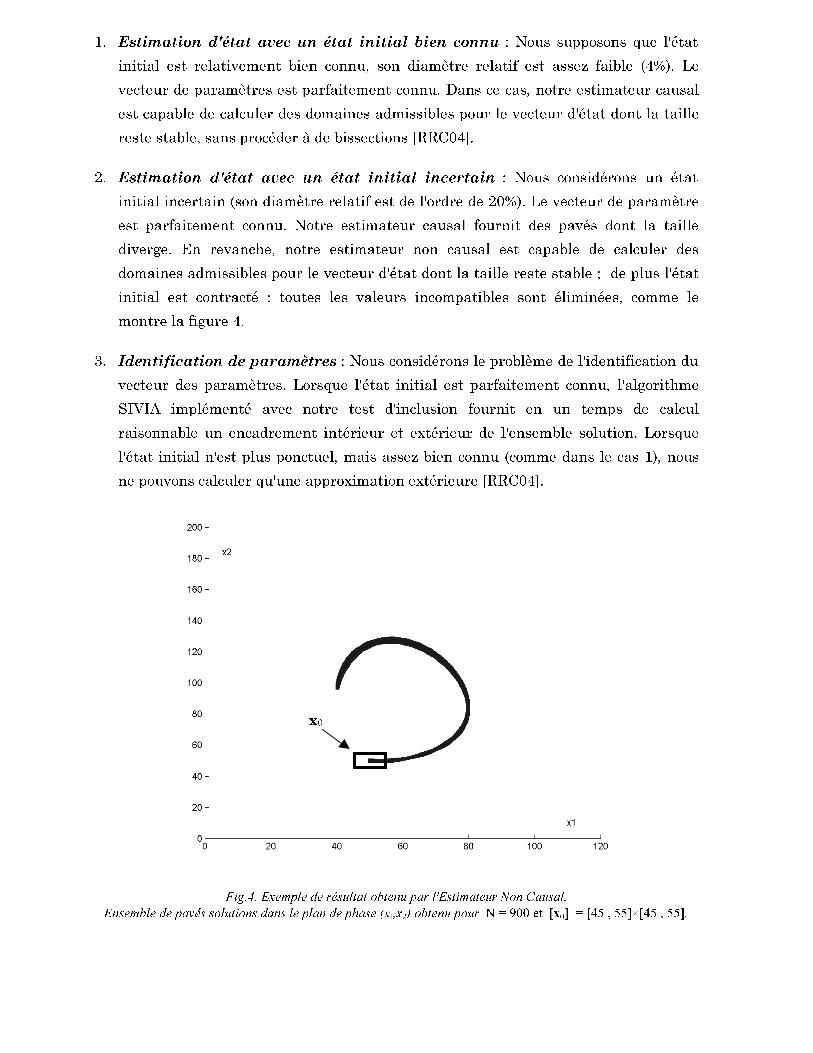
Méthodes ensemblistes pour modèles à temps continu 75
1. Estimation d'état avec un état initial bien connu : Nous supposons que l'état
initial est relativement bien connu, son diamètre relatif est assez faible (4%). Le
vecteur de paramètres est parfaitement connu. Dans ce cas, notre estimateur causal
est capable de calculer des domaines admissibles pour le vecteur d'état dont la taille
reste stable, sans procéder à de bissections [RRC04].
2. Estimation d'état avec un état initial incertain : Nous considérons un état
initial incertain (son diamètre relatif est de l'ordre de 20%). Le vecteur de paramètre
est parfaitement connu. Notre estimateur causal fournit des pavés dont la taille
diverge. En revanche, notre estimateur non causal est capable de calculer des
domaines admissibles pour le vecteur d'état dont la taille reste stable ; de plus l'état
initial est contracté : toutes les valeurs incompatibles sont éliminées, comme le
montre la figure 4.
3. Identification de paramètres : Nous considérons le problème de l'identification du
vecteur des paramètres. Lorsque l'état initial est parfaitement connu, l'algorithme
SIVIA implémenté avec notre test d'inclusion fournit en un temps de calcul
raisonnable un encadrement intérieur et extérieur de l'ensemble solution. Lorsque
l'état initial n'est plus ponctuel, mais assez bien connu (comme dans le cas 1), nous
ne pouvons calculer qu'une approximation extérieure [RRC04].
Fig.4. Exemple de résultat obtenu par l'Estimateur Non Causal.
Ensemble de pavés solutions dans le plan de phase (x1,x2) obtenu pour N = 900 et [x0] = [45 , 55]×[45 , 55].
x0
76 Chapitre 5
5.7.2 Etude de cas en bio-procédé
Un bio-procédé est un procédé constitué par des bactéries ou des champignons et il est
généralement difficile de trouver un modèle reproduisant d’une manière satisfaisante le
comportement de ce type de systèmes. Les méthodes ensemblistes constituent donc une
approche intéressante pour caractériser l’incertitude sur ces modèles. Un estimateur
d’état pour des bio-procédés décrits par des équations différentielles a été proposé dans
[RFC97]. Néanmoins, on ne peut en aucun cas garantir que les approximations
extérieures calculées contiennent la vraie solution. D’autres estimateurs utilisant une
discrétisation temporelle du modèle continu ont été proposés dans [FA03, VFA03].
Nous avons étudié un bio-procédé décrit par un modèle à temps continu, à l’aide de notre
estimateur à horizon glissant. L’exemple étudié est extrait de la littérature [BH01]. Le
procédé considéré concerne la culture de cellules CHO. Le modèle cinématique fait
intervenir les concentrations de bio-masse, de glucose, de glutamine et de lactate. Le
problème est de déterminer la concentration de bio-masse X en mesurant celle du glucose
G, de la glutamine Gln et du lactate L et en utilisant une équation d'état à temps
continu définie par [BCH99], [BH01].
−
−
−
−
= =−
=−
=
ɺ
ɺ
ɺ
ɺ
2
1
2
1
0.33 0.069 0.006
1 1 3
1.006 0.114 0.09
2 1 2
0.33 0.069 0.006
3 1 3
1.006 0.114 0.09
4 1 2
0.129
0.043
0.030444
0.064586
x
x
x
x
x x x e
x x x e
x x x e
x x x e
(5.43)
avec le vecteur d'état x = [x1, x2, x3, x4]T = [X, G, Gln, L]T. Nous avons considéré les
hypothèses suivantes :
(i) Nous prenons un état initial très incertain : pour le problème étudié, cela
correspond à des erreurs de 50% sur les concentrations initiales.
(ii) Nous considérons que le nombre de mesures est assez faible. En effet, il est
fréquent qu'en bio-procédé, les mesures soient rares et irrégulières (dans le
temps). Nous supposons que nous ne disposons d'une nouvelle mesure qu'une fois
par 6 heures.
(iii) L'erreur additive sur la sortie est considérée inconnue mais bornée de borne égale
à 1%.
(iv) Afin de réduire le pessimisme lors des étapes de prédiction, le vecteur d'état
correspondant au début de l'horizon temporel est partitionné. Nous avons étudié
le cas d'une partition en 3, 5 et 11 boîtes.
Méthodes ensemblistes pour modèles à temps continu 77
(v) Nous avons étudié plusieurs tailles d'horizons temporels.
L'estimateur à horizon glissant que nous avons développé fournit de très bons résultats.
De plus, nous avons constaté que l'approximation extérieure du vecteur d'état est moins
pessimiste lorsqu'on utilise un horizon temporel de grande taille et un nombre de
bissection du vecteur d'état important [RRC05], comme on pouvait bien entendu, s'y
attendre.
5.8 Publications[RRC04] T. Raïssi, N. Ramdani, Y. Candau, Set membership state and parameter estimation for
systems described by nonlinear differential equations, Automatica 40(10):1771-1777, 2004.
This paper investigates the use of guaranteed method s to perform state and parameter estimation
for nonlinear continuous-time systems, in a bounded-error context. A state estimator based on a
prediction-correction approach is given, where the prediction step consists in a validated
integration of an initial value problem for an ordinary differential équation (IVP for ODE) using
interval analysis and high-order Taylor models, while the correction step uses a set inversion
technique. The state estimator is extended to solve the parameter estimation problem. An
illustrative example is presented for each part.
[RRC05] T. Raïssi, N. Ramdani, Y. Candau, Bounded-error moving horizon state estimator for
non-linear continuous-time systems : application to a bioprocess system, Journal of Control
Process 15(5):537-545, 2005.
This paper investigates moving horizon state estimation (MHSE) within a bounded-error context
for continuous-time systems. Verified integration of the non-linear ordinary differential equations
used as system équation is achieved with interval Taylor expansions. In addition, interval
constraint propagation techniques are used in order to reduce the pessimism due to interval
arithmetic. The new MHSE method is illustrated with a bio-process system, for several lengths of
the time horizon.
[RRC03a] T. Raïssi, N. Ramdani, Y. Candau, Guaranteed state estimation for nonlinear continuous
time systems with taylor models, 13th IFAC Symposium on System Identification,
SYSID2003, Rotterdam, pp.1725-1730.
The aim of this paper is to study state estimation for nonlinear continuous-time systems in a
bounded-error context. A causal estimator based on prediction-correction approach is proposed.
The prediction part consists on a validated integration of an Initial Value Problem for an
Ordinary Differential Equation. The correction part uses set inversion. The main tools used are
Taylor models and interval analysis. The derived estimator is illustrated on an example.
[RRC03b] T. Raïssi, N. Ramdani, Y. Candau, Parameter estimation for nonlinear continuous-time
systems in a bounded error context, Proceedings 42th IEEE Conference on Decision and
Control, CDC2003, Maui, USA, pp.2240-2245.
This paper deals with guaranteed parameter estimation bounded error context for nonlinear
continuous-time systems. Perturbations are assumed bounded but otherwise unknown.solution is
a set of parameter vectors consistent with modelling hypotheses, measured data and prior error
bounds. The algorithm proposed in this paper does not suffer initialization problems encountered
in the local optimization methods. The main tools to solve such a problem are guaranteed
techniques for the integration of ordinary differential equations, and set inversion. Both of these
techniques interval analysis. An illustrative example will be given.

78 Chapitre 5
[RRC03c] T. Raïssi, N. Ramdani, Y. Candau, Estimation d’état pour des systèmes décrits par des
équations différentielles non-linéaires dans un contexte à erreurs bornées, actes des
JDA2003, pp.341-346.
The aim of this paper is to present a guaranteed state estimator for nonlinear continuoustime
systems in a bounded error context. This estimator is based on prediction correction approach. The
prediction part consists on a validated resolution of an initial value problem of ordinary
differential équation (IVP for ODE). The correction part consists on determining the set of all
state vectors (solutions of the IVP for ODE) that are consistent with the available measured data,
it is a set inversion problem. An illustrative example will be presented.
[RRC06] T. Raïssi, N. Ramdani, Y. Candau, Robust nonlinear continuous-time state estimation
using interval taylor models, 5th IFAC Symposium on Robust Control Design, soumise.
In this paper, state estimation for non-linear continuous-time systems is considered in a bounded-
error context. The studied systems are described by ordinary differential equations for which
explicit solutions are not available. The state estimator built in this paper relies on a validated
integration of the ordinary differential equations using Taylor models and on set inversion. This
estimator generates the set of all state vectors that are consistent with the modelling hypotheses,
the measured data and the noise prior bounds. This property makes the use of this estimator
suitable in the field of robust control. To render this algorithm efficient when the initial state is
approximately known, consistency techniques are used. An illustrative example is presented.
Chapitre 6
Perspectives et projets de recherches
Dans ce document, j'ai présenté mes travaux sur la propagation d'incertitude dans les
modèles de simulation par méthodes différentielles puis synthétisé la contribution de
mes travaux de recherche au développement de méthodes ensemblistes apportant
validation et garantie lors de l'identification de paramètres ou l'estimation de l'état d'un
système. Alors que les méthodes ensemblistes de résolution de problèmes mettant en jeu
des modèles linéaires ou algébriques non-linéaires mais à variables réelles ont atteint
une certaine maturité et peuvent résoudre efficacement des problèmes de complexité
importante, le cas des modèles à temps continu ou à variables complexes nécessitait
encore des développements méthodologiques. Ce fut l'objectif principal de mes travaux
de recherche :
– La nouvelle arithmétique d'intervalles complexes utilisant une représentation polaire
que nous avons développée devrait permettre de mieux contrôler le pessimisme des
fonctions d'inclusions lorsque les modèles utilisés sont fortement non-linéaires.
– L'intégration numérique garantie d'équations différentielles par méthodes de Taylor
intervalle nous a permis d'améliorer le traitement ensembliste de l'estimation de
grandeurs lorsque les modèles sont à temps continu. Nous avons ainsi étendu les
observateurs ensemblistes existants au cas à temps continu et les avons testé avec
succès sur des problèmes réels mais de complexité réduite.
Ces résultats sont encourageants mais restent cependant insuffisants pour résoudre des
problèmes de grande dimension à variables complexes ou décrits par des modèles à
temps continu. A cette fin, je propose de mener à court et moyen termes, les
développements méthodologiques suivants :
•••• Résolution des équations différentielles: L'utilisation des méthodes de Taylor
intervalle introduites dans le chapitre 5 avec des modèles de grande dimension et
lorsque le vecteur état initial ou le vecteur des paramètres est un pavé de taille
importante, fournit des résultats assez pessimistes et donc souvent inexploitables.
Une alternative intéressante pourrait être apportée par des inclusions
différentielles. On sait par exemple déterminer une fonction d'inclusion pour la
solution des équations différentielles lorsqu'il est possible d'encadrer le système
original par deux systèmes coopératifs, ce résultat est issu de la théorie des
systèmes dynamiques monotones. Cette théorie devrait aussi permettre de
résoudre de la même manière les systèmes d'équations aux dérivées partielles
paraboliques utilisés pour modéliser des problèmes de diffusion-réaction en chimie
ou de diffusion thermique par exemple. Dans le cas général, des inclusions
différentielles peuvent encore être obtenues en utilisant le théorème de Müller
[KW06]. Enfin, les modèles dynamiques directs généralement établis en robotique
par exemple, prennent la forme d'équations différentielles implicites ; des nouvelles
méthodes d'intégration numérique doivent alors être utilisées. La méthode
proposées dans [HBM03], utilisant anti-dérivation (intégration) et développement
de Taylor, devrait permettre la résolution de ce problème.
•••• Propagation de contraintes continues à variable complexes : L'utilisation de
l'arithmétique des secteurs intervalles permet de traiter les problèmes de
satisfaction de contraintes continues mettant en jeu des variables complexes sans
utiliser de décomposition en parties réelles et imaginaires. Ce résultat est
intéressant lorsque cette décomposition est difficile à obtenir, ou lorsqu'elle
provoque un accroissement artificiel du nombre d'occurrences des variables dans
les modèles. On travaille ainsi avec des graphes de contraintes contenant peu de
cycles, voire acycliques. Nonobstant, la résolution des contraintes primitives telles
que l'addition de complexes, le logarithme de complexe, la puissance d'un complexe
par un réel, les fonctions hyperboliques de complexes, etc ...., est toujours réalisée
par projection de contraintes : le domaine obtenu par les contacteurs n'est pas
minimal. Pour améliorer la performance de la contraction, il convient de résoudre
ces contraintes globalement afin d'assurer une consistance globale. On pourrait par
exemple utiliser une démarche similaire à celle de l'algorithme d'optimisation sous
contraintes utilisé dans le chapitre 4 pour traiter le problème de l'addition de deux
secteurs....
•••• Recherche intérieure, encadrements de paramètres et non-connexité :
Lors de l'estimation de grandeurs pour une certaine catégorie de problèmes
d'ingénierie, comme l'estimation de paramètre physiques par exemple, les
ingénieurs ne sont pas vraiment intéressés par la forme exacte de l'ensemble
solution S, mais seulement par la projection de ce dernier sur les axes des
paramètres. Il suffit alors de fournir des encadrements intérieurs et extérieurs de
l'enveloppe (hull) [S] de S, c'est-à-dire le pavé contenant la projection de S. Des
algorithmes tels que Hull introduit dans [Jau00] et que j'ai étendu aux modèles à
variables complexes [RRCI05] peuvent répondre à cet objectif. Dans sa version
actuelle, cette algorithme ne détecte pas la présence de sous-ensembles non-
connexes de solutions. Il serait intéressant de modifier cet algorithme, en utilisant
les algorithmes de vérification de connexité développés dans [DJC05] par exemple,
afin de manipuler des unions de pavés, dans lesquelles chaque pavé correspondra à
l'enveloppe d'un sous-ensemble de solutions continues et connexes. Une telle
approche permettrait de réduire la taille mémoire et la complexité des calculs
ensemblistes sans perdre d'informations quant à la connexité de l'ensemble
solution.
Ces développements méthodologiques devraient permettre aux méthodes ensemblistes
de résoudre de manière efficace des problèmes réels pour lesquels les notions de
validation et garantie sont importantes.
C'est le cas de deux projets difficiles auxquelles je participe actuellement : le premier
concerne la commande et interface patient en locomotion artificielle par stimulation
électrique fonctionnelle et le second, le diagnostic multi-échelles de matériaux par
méthodes photo-thermiques périodiques
•••• Méthodes ensemblistes pour la commande en locomotion artificielle : Ce
projet de recherche est réalisé au sein du projet DEMAR1 au LIRMM CNRS Univ.
Montpellier II. Ma contribution concerne le développement d'observateur intervalle
pour des systèmes décrits par des équations différentielles ordinaires non-linéaires
mais de grande dimension.
Aujourd’hui, la stimulation électrique fonctionnelle (FES) est une des voies
possibles vers la restauration du mouvement de membres paralysés. Un des
objectifs du projet consiste à pallier les déficiences des systèmes FES actuels qui
fonctionnent en boucle ouverte, ne gèrent pas la fatigue, etc ... Dans une étape
intermédiaire, la boucle de commande est fermée par le patient via un nouveau
déambulateur instrumenté qui intègre sur chaque poignée un capteur d’effort 6
axes permettant au patient de disposer d’une gestion continue de l’ensemble des
degrés de libertés. Ce déambulateur rendra possible la mise en place d’une
commande avancée.
La difficulté de cette étape est de retrouver la posture et le mouvement du patient
à partir de la seule mesure des efforts fournis par le déambulateur, afin d’adapter
le mouvement des membres inférieurs à celui du mouvement volontaire du haut du
corps. C’est un problème numériquement difficile pour deux raisons principales : (i)
Il nécessite l’intégration numérique d'un modèle dynamique biomécanique de
1 Le projet DEMAR, « DEambulation et Mouvement ARticifiel » est un projet commun INRIA et LIRMM-CNRS-
Université Montpellier II. Le responsable du projet est Mr David GUIRAUD, INRIA Sophia-Antipolis. Ce travailest aussi réalisé en collaboration avec Mr Philippe FRAISSE, LIRMM-CNRS-Université Montpellier 2.
grande dimension, ayant la forme d'une équation différentielle implicite, en
présence d'incertitudes de modèle et avec un état initial incertain. (ii) La
détermination de la posture est un problème qui peut admettre plusieurs solutions,
car plusieurs postures pouvant correspondre à un même vecteur d’efforts. Toutes
ces postures doivent être estimées et l’incertitude qui leur est associée doit être
rigoureusement caractérisée en tenant compte de toutes les sources d’incertitudes :
les données expérimentales, les paramètres du modèle biomécanique, l’état initial,
...
Dans le cadre de ce projet, ma contribution consistera à développer des méthodes
ensemblistes afin d'assurer les propriétés de validation et de garantie, cruciales
pour apporter une sécurité dans les résultats : comme par exemple, garantir
l'absence de chute du patient !
•••• Méthodes ensemblistes pour l'analyse multi-échelles de matériaux : Ma
contribution à cette recherche concerne le développement d'outils ensemblistes
pour réaliser une analyse multi-échelles des propriétés thermo-mécaniques de
matériaux par méthodes d'identification périodiques2. Les modèles utilisés seront à
variables complexes ou à temps continu. Il s'agit en fait de réaliser l'observation
d'une propriété thermo-mécanique d'un matériau jouant le rôle d'un traceur. Ce
dernier permettra d'assurer le suivi des performances du matériau et donc détecter
si une éventuelle modification est représentative d'un endommagement. Le
contexte industriel visé concernant l'aviation, le spatial et le domaine militaire, les
propriétés requises portent essentiellement sur la protection thermomécanique et
l'augmentation des temps de vie de pièces mécaniques. Il est clair qu'assurer les
propriétés de validation et de garantie lors du diagnostic sont primordiales pour le
succès de ce projet : les méthodes ensemblistes joueront là encore un rôle clé.
2 Ce projet a été présenté dans le cadre de l'appel à projet non thématique 2005 de l'ANR. Le responsable du projet
est Mr. Laurent AUTRIQUE (Université Perpignan, DGA/GHF/Odeillo).
Références bibliographiques
[ABC05] T. Alamo, J.M. Bravo, E.F. Camacho, Guaranteed state estimation by zonotopes,Automatica 41 , 2005.
[Adr00] A. Adrot, Diagnostic à base de modèles incertains utilisant l'analyse par intervalles : l'approchebornante, Thèse de Doctorat INPL, 2000.
[AH83] G. Alefeld, J. Herzberger, Introduction to Interval Computation, Academic Press, NY,1983.
[Akç04] H. Akçay, The size of the membership-set in a probabilistic framework, Automatica 40:253–260, 2004.
[ALR02a] L. Autrique, J.P. Leyris, N. Ramdani, Optimal Sensor Location for the Identification ofMoving Heat Sources, in Proceedings of IFAC World Congress B’02, CD-ROM, 6p.
[ALR02b] L. Autrique, J.P. Leyris, N. Ramdani, Sur L’identification Du Couple "Puissance/Trajectoire" Dans Le Cas D'une Source Thermique Mobile, in CIFA ConfèrenceInternationale Francophone d’Automatique 2002, Nantes, pp.934–938.
[Arc53] Archimedes, On the measurement of the circle, In: Thomas L. Heath (ed.), The Works ofArchimedes, Cambridge University Press, Cambridge, 1897; Dover edition, 1953.
[ARR05] L. Autrique, N. Ramdani, S. Rodier, Mobile source estimation with an iterativeregularization method, 5AI Int. Conf. Inverse Problems in Engineering: Theory, Practice, July2005, Cambridge, UK.
[ATD00] P. Aude, L.Tabary, P.Depecker, Sensitivity analysis and validation of buildings thermalmodels using adjoint-code method, Energy and Buildings (31): 267–283, 2000.
[Aud98] P. Aude, Contribution à l’amélioration des protocoles de validation des modèles numériques desimulation du comportement thermo-aéraulique des bâtiments, Thèse de l’INSA de Lyon, 285pp,1998.
[BABD03a] Y. Becis-Aubry, M. Boutayeb, M. Darouach, A parameter estimation algorithm fornonlinear multivariable systems subject to bounded disturbances, in Proc. 2003 AmericanControl Conference, 2003, pp.
[BABD03b] Y. Becis-Aubry, M. Boutayeb, M. Darouach, An optimal algorithm for the parameteridentification of MIMO linear systems using bounding ellipsoids, in Proc. 42th IEEEConference on Decision and Control, 2003, pp.
[BBC90] G. Belforte, B. Bona, V. Cerone, Parameter estimation algorithms for a set-membershipdescription of uncertainty, Automatica 26, 887-898, 1990.
[BBJ+01] I. Braems, F. Berthier, L. Jaulin, M. Kieffer and E. Walter, Guaranteed estimation ofelectrochemical parameters by set inversion using interval analysis. JournalElectroanalytical Chemistry 495: 1-9, 2001.
[BCD+95] D. Bloomfield, Y. Candau, P. Dalicieux, S. Delille, S. Hammond, K. Lomas, C. Martin, F.Parand, J. Patronis, N. Ramdani, New techniques for validating buildings energysimulation models, Proc. Building Simulation'95, Madison, USA, pp.596-603, 1995.
[BCH99] P. Bogaerts, J. Castillo and R. Hanus, A general mathematical modelling technique forbioprocesses in engineering applications, Systems analysis modelling simulation 35: 87-113,1999.
[BCT98] E.W. Bai, H. Cho, R. Tempo, Convergence properties of the membership set, Automatica34 (10):1245–1249, 1998.
[Ber97] M. Berz, COSY INFINITY Version 8 reference manual, Technical Report MUSCL-1088,National Superconducting Cyclotron Laboratory, Michigan State University, Est Lansing,MI 488824, 1997, http://cosy.nscl.msu.edu
[BH01] P. Bogaerts and R. Hanus. On-line state estimation of bioprocesses with full horizonobservers, Mathematics and computers in Simulation 56: 425-441, 2001.
[BH99] E.R. Bai, Y.F. Huang, Convergence of optimal sequential outer bounding sets in boundederror parameter estimation, Mathematics and Computers in Simulation 49: 307–317, 1999.
[BIGC04] A. Boudenne, L. Ibos, E. Gehin, Y. Candau, A Simultaneous characterization of thermalconductivity and diffusivity of polymer materials by a periodic method, Journal of PhysicsD: Applied Physics 37: 132–139, 2004.
[BJK+03] I. Braems, L. Jaulin, M. Keiffer, N. Ramdani, E.Walter, Reliable parameter estimation inpresence of uncertainty, in proc. 13th IFAC Symposium on System Identification, Rotterdam,SYSID2003, pp.1856-1861.
[BM03] P. Bouron, D. Meizel, Evaluation de méthodes ensemblistes pour l’estimation d’état et lafusion multisensorielle dans le domaine automobile, APII-Journal Européen des SystèmesAutomatisés 37(9): 1095-1110, 2003.
[Bou02] P. Bouron, Méthodes ensemblistes pour le diagnostic, l'estimation d'etat et la fusion de donnéestemporelles, Thèse de Doctorat UTC, 2002.
[BP86] J.S. Bendat, A.G. Piersol, Random Data, Analysis and Measurement Procedures, SecondEdition, John Wiley and Sons,1986.
[BR71] DP. Bertsekas, I.B. Rhodes, Recursive state estimation for a set-membership description ofuncertainty, IEEE Transactions on Automatic Control AC-16(2): 117–128
[Bra02] I. Braems, Méthodes ensemblistes garanties pour l’estimation de grandeurs physiques, Thèse del’université Paris-Sud, 2002.
[BRB+05] I. Braems, N. Ramdani, A. Boudenne, L. Jaulin, L. Ibos, E. Walter, Y. Candau, New set-membership techniques for parameter estimation in presence of model uncertainty, 5AIInt. Conf. Inverse Problems in Engineering: Theory, Practice, July 2005, Cambridge, UK.
[BRKW03] I. Braems, N. Ramdani, M. Kieffer, E. Walter, Caractérisation garantie d'un dispositif demesure de grandeurs thermiques, APII-Journal Européen des Systèmes Automatisés 37(9):1129-1143, 2003.
[CC90] C. Canudas de Wit, J. Carrillo, A modified EW-RLS algorithm for systems with boundeddisturbances, Automatica 26(3): 599–606, 1990.
[CE04] G. Calafiore, L. El Ghaoui, Ellipsoidal bounds for uncertain linear equations dynamicalsystems, Automatica 40: 773 – 787, 2004.
[CG90] T. Clement et S. Gentil, Recursive membership set estimation for output-error models,Mathematics and Computer in Simulation 32: 505-513, 1990.
[CGVZ98] L. Chisci, A. Garulli, A. Vicino, G. Zappa, Block Recursive Parallelotopic Bounding in SetMembership Identification, Automatica 34 (1): 15– 22, 1998.
[CGZ96] L. Chisci, A. Garulli, G. Zappa, Recursive State Bounding by Parallelotopes,Automatica 32(7): 1049–1055, 1996.
[Cle87] J. C. Cleary, Logical arithmetic, Future Computing Systems 2 (2): 125–149, 1987.
[CMD98] R. Cameron, R.L. Marcos, C. De Prada, Model validation of discrete transfer functionsusing the distortion method, Mathematical and Computer Modelling of Dynamical Systems 4:58-72, 1998.
[CMP98] R. Cameron, R.L. Marcos, C. De Prada, Model validation of discrete transfer functionsusing the distortion method, Mathematical and Computer Modelling of Dynamical Systems 4:58-72, 1998.
[CR00] F. L. Chernousko, D. Y. Rokityanskii, Ellipsoidal Bounds on Reachable Sets of DynamicalSystems with Matrices Subjected to Uncertain Perturbations, Journal of OptimizationTheory and Applications 104(1): 1–19, 2000.
[CRRI05] Y. Candau, T. Raissi, N. Ramdani, L. Ibos, Complex interval arithmetic using polar form,Reliable Computing, à paraître en 2005.
[Dar1876] G. Darboux, Sur les développements en série des fonctions d'une seule variable, Journaldes Mathématique pures et appliquées, 3e série, tome II, pp.291–312, 1876.
[Dav87] E. Davis, Constraint propagation with interval labels, Artificial Intelligence 32: 281–331,1987.
[DDBC03] C. Drocourt, L. Delahoche, E. Brassart, C. Cauchois, Localisation et modélisationensembliste de l’environnement d’un robot, APII-Journal Européen des SystèmesAutomatisés 37(9): 1075-1094, 2003.
[DH87] S. Dasgupta, Y.F. Huang, Asymptotically convergent modified recursive least-squareswith data-dependent updating and forgetting factor for systems with bounded noise,IEEE Transactions on information theory IT-33(3):383–392, 1987.
[DJC05] N. Delanoue, L. Jaulin, B. Cottenceau, Using interval arithmetic to prove that a set ispath-connected, Theoretical Computer Science, Special issue: Real Numbers andComputers, 2005, à paraître.
[Doe70] D.H. Doehlert, Uniform shell design, Applied Statistics 19 : 231-239, 1970.
[Dro02] C. Drocourt, Localisation et modélisaiton de l'environnement d'un robot mobile par cooperationde deux capreurs omnidirectionnels, Thèse de Doctorat de l'UTC, 2002.
[DW01] C. Durieu, E. Walter, Estimation ellipsoïdale à erreur bornée, in Identification des systèmes,Hermès, Paris, 2001.
[DWP01a] C. Durieu, E. Walter, B. Polyak, Set membership estimation with the trace criterion madesimpler than with the determinant criterion, in System identification, a Proceedings volumefrom the SYSID2000, 12th IFAC Symposium on System identification, Pergamon,Elsevier, 2001, pp. 1007-1012.
[DWP01b] C. Durieu, E. Walter, B. Polyak, Multi-input multi-output ellipsoidal state bounding, J.Optimization Theory and Appl. 111(2): 273-303, 2001.
[Dwy51] P. S. Dwyer, Linear Computations, J. Wiley, N.Y., 1951.
[Eij81] P. Eijgenraam. The Solution of Initial Value Problems Using Interval Arithmetic.Mathematical Centre Tracts No. 144. Stichting Mathematisch Centrum, Amsterdam, 1981.
[ERC00] S. Ezzamari, N. Ramdani, Y. Candau, Analyse de sensibilité de la réponse fréquentielled'un modèle en thermique du bâtiment, Proc. SFT2000, Lyon, pp.723-728, Elsevier, 2000.
[FA03] J. M. Flaus, O. Adrot, Estimation d'état sûre pour procédés non linéaires par méthodesensemblistes – Application à un procédé biotechnologique, APII - Journal Européen desSystèmes Automatisés 37(9) : 1145-1161, 2003.
[FH82] E. Fogel, Y.F. Huang, On the value of information in system identification – boundednoise case, Automatica 18(2): 229-238, 1982.
[FP02] R.T. Farouki, H. Pottmann, Exact Minkowski products of N complex disks. ReliableComputing 8: 43-66, 2002.
[FPG04] I. Fagarasan, S. Ploix, S. Gentil, Causal fault detection and isolation based on a set-membership approach, Automatica 40(12): 2099-2110, 2004.
[Gar97] F. Garde, Validation et développement d’un modèle thermo-aéraulique de bâtiments enclimatisation passive et active, Thèse de l’université de la Réunion, 1997.
[GK90] M. Gautier, W. Khalil, Direct calculation of minimum inertial parameters of serial robots,IEEE Transactions on Robotics and Automation 6(3): 368–373, 1990.
[GRH00] J.L. Gouzé, A. Rappaport, M.Z. Hadj-Sadock, Interval observers for uncertain biologicalsystems, Ecological Modelling 133(1-2):45-56, 2000.
[HBM03] J. Hoefkens, M. Berz, K. Makino, Computing validated solutions of implicit differentialequations, Advances in Computationnal Mathematics 19:231–253, 2003.
[Hen71] P. Henrici, Circular arithmetic and the determination of polynomial zeros. SpringerLecture Notes 228: 86-92, 1971.
[Her1878] Ch. Hermite, Extrait d'une lettre de M. Ch. Hermite à M. Borchardt sur la formuled'interpolation de Lagrange, Journal de Crelle, Oeuvres, tome III, 84(70), pp.432–443, 1878.
[HG01] M.Z. Hadj-Sadock, J.L. Gouzé, Estimation of uncertain models of activated sludgeprocesses with interval observers, Journal of Process Control 11(3):299-310, 2001.
[HJO04] J.C. Helton, J.D. Johnson, W.L. Oberkampf, An exploration of alternative approaches tothe representation of uncertainty in model predictions, Reliability Engineering and SystemSafety 85: 39–71, 2004.
[HW04] E Hansen, G.W. Walster, Global optimization using interval analysis, 2nd ed. Marcel Dekker,New York, 2004.
[Jau00] L. Jaulin, Interval constraint propagation with application to bounded-error estimation,Automatica 36(10):1547-1552, 2000.
[Jau02] L. Jaulin, Nonlinear bounded-error state estimation of continuous-time systems,Automatica 38, 1079 –1082, 2002.
[JBW02] L. Jaulin, I. Braems, E. Walter, Interval methods for nonlinear identification and robustcontrol, In Proc. CDC2002, 41st IEEE Conference on Decision and Control, Las Vegas,USA, pp. 4676-4681, 2002.
[JKDW01] L. Jaulin, M. Kieffer, O. Didrit, E. Walter, Applied interval analysis, Springer: London, 2001.
[JVD02] M. Janssen, P. Van Hentenryck, Y. Deville, A Constraint Satisfaction Approach forEnclosing Solutions to Parametric Ordinary Differential Equations, SIAM Journal onNumerical Analysis 40(5): 1896-1939, 2002.
[JW93a] L. Jaulin and E. Walter, Guaranteed nonlinear parameter estimation from bounded-errordata via interval analysis. Mathematics and Computer in Simulations 35: 123-137, 1993.
[JW93b] L. Jaulin and E. Walter, Set inversion via interval analysis for nonlinear bounded-errorestimation. Automatica 29: 1053-1064,1993.
[JW99] L. Jaulin, E. Walter, Guaranteed parameter bounding for nonlinear models with uncertainexperimental factors, Automatica 35, 849– 856, 1999.
[KJW02] M. Kieffer, L. Jaulin, and E. Walter. Guaranteed recursive nonlinear state bounding usinginterval analysis, International Journal of Adaptative Control and Signal Processing 6(3): 193–218, 2002.
[KJW02] M. Kieffer, L. Jaulin, E. Walter, Guaranteed recursive non-linear state bounding usinginterval analysis, International Journal Of Adaptive Control And Signal Processing 16 :193 –218, 2002.
[KJW02] M. Kieffer, L. Jaulin, E. Walter, Guaranteed recursive non-linear state bounding usinginterval analysis, International Journal of Adaptative Control and Signal Processing 16:193-218, 2002.
[KJWM00] M. Kieffer, L. Jaulin, E. Walter and D. Meizel, Robust autonomous robot localizationusing interval analysis. Reliable Computing (2000) 6, 337-362.
[KJWM00] M. Kieffer, L. Jaulin, E. Walter, and D. Meizel. Robust autonomous robot localizationusing interval analysis, Reliable Computing 6(3): 337–362, 2000.
[Kle97] J.P.C. Kleijnen, Sensitivity Analysis and Related Analysis. A review of Some StatisticalTechniques, Journal of Statistical Computation and Simulation 57: 111-142, 1997.
[KU80] R. Klatte, C. Ullrich, Complex sector arithmetic, Computing 24(2-3): 139-148, 1980.
[KW06] M. Kieffer, E. Walter, Guaranteed nonlinear state estimation for continuous-timedynamical models from discrete-time measurements, 5th IFAC Symposium on RobustControl Design, Toulouse, 2006, soumise.
[LB02] S. Lesecq, A. Barraud, Une approche factorisée plus simple et numériquement stable pourl'estimation ensembliste ellipsoïdale, APII-Journal Européen des Systèmes Automatisés 36(4):505-518, (2002).
[LEMB97] K.J. Lomas, H. Eppel, C.J. Martin and D.P. Bloomfield, Empirical validation of buildingenergy simulation programs, Energy and Buildings 26(3): 253-275, 1997.
[LHCJ04] M. Lhommeau, L. Hardouin, B. Cottenceau, L. Jaulin, Interval analysis and dioid:application to robust controller design for timed event graphs, Automatica 40(11): 1923-1930, 2004.
[Lju99] L. Ljung, Model validation and model error modelling, Technical report for theAströmsymposium on control, ftp.control.isy.liu.se, file 2125, 1999.
[Loh87] R. J. Lohner, Enclosing the solutions of ordinary initial and boundary value problems, inComputer Arithmetics: Scientific Computation and Programming Languages, Wiley, 1987.
[Loh88] R. J. Lohner, Einschließung der Lösung gewöhnlicher Anfangs–und Randwertaufgaben undAnwendungen, PhD thesis, Universität Karlsruhe, 1988.
[Loh94] R. J. Lohner. AWA: software for the computation of guaranteed bounds for solutions of ordinaryinitial value problems. Institut fur Angewandte Mathematik, Universitat Karlsruhe, 1994,ftp://iamk4515.mathematik.uni-karlsruhe.de/pub/awa
[Mak98] K. Makino, Rigorous Analysis of Nonlinear Motion in Particle Accelerators. PhD thesis,Michigan State University, East Lansing, Michigan, USA, 1998.
[Mar01] T. A. Mara, Validation et analyse de sensibilité de codes de simulation thermo-aéraulique del’habitat, Thèse de l’université de la Réunion, 2001.
[MC98] D. Maksarov, Z.S. Chalabi, Computing bounds on greenhouse energy requirements usingbounded error approach, Control Engineering Practice 6: 947-955, 1998.
[Mer04] J.-P. Merlet, Solving the Forward Kinematics of a Gough-Type Parallel Manipulator withInterval Analysis, Int. J. of Robotics Research 23(3): 221–235, 2004.
[MGBM01] T. A. Mara, F.Garde, H.Boyer, M.Mamode, Empirical validation of the thermal model ofa passive solar cell test, Energy and Buildings (33): 589–599, 2001.
[MN02] D.G. Maksarov, J.P. Norton, Computationally efficient algorithms for state estimationwith ellipsoidal approximations, Int. J. Adapt. Control Signal Process 16(6): 411-434, 2002.
[MNPW96] M. Milanese, J.P. Norton, H. Piet-Lahanier, E. Walter (Eds), Bounding approaches to systemidentification, Plenum, New York, 1996.
[Moo59] R. E. Moore. Automatic error analysis in digital computation. Technical Report Space Div.Report LMSD84821, Lockheed Missiles and Space Co., 1959.
[Moo66] R. E. Moore, Interval Analysis, Prentice-Hall, Englewood Cliffs, 1966.
[Mur98] D.J. Murray-Smith, Methods for the external validation of continuous system simulationmodels : A review, Mathematical and Computer Modelling of Dynamical Systems 4: 5-31,1998.
[MV91a] M. Milanese, A. Vicino, Estimation theory for nonlinear models and set membershipuncertainty, Automatica 27(2): 403–408, 1991.
[MV91b] M. Milanese, A. Vicino, Optimal estimation theory for dynamic systems with setmembership uncertainty : an overview, Automatica 27(6): 997–1009, 1991.
[Ned99] N.S. Nedialkov, Computing rigorous bounds on the solution of an initial value problem for anordinary differential equation, PhD, University of Toronto, 1999.
[Neu80] A. Neumaier, Interval methods for systems of equations. Cambridge university press,Combridge, UK, 1990.
[Nic80] K. Nickel, Arithmetic of complex sets. Computing 24: 97-105, 1980.
[NJ02] N. S. Nedialkov, K. R. Jackson, The Design and Implementation of an Object-OrientedValidated ODE Solver,http://www.cs.toronto.edu/pub/reports/na/ned.software.01.ps.gz
[NJ99] N. S. Nedialkov, K. R. Jackson, An Interval Hermite-Obreschkoff Method for ComputingRigorous Bounds on the Solution of an Initial Value Problem for an Ordinary DifferentialEquation, Reliable Computing 5: 289-310, 1999.
[NJC99] N.S. Nedialkov, K.R. Jackson, G.F. Corliss, Validated solutions of initial value problemsfor ordinary differential equations, Applied Mathematics and Computation 105(1): 21-68,1999.
[NJP01] N.S. Nedialkov, K.R. Jackson, J. D. Pryce, An Effective High-Order Interval Method forValidating Existence and Uniqueness of the Solution of an IVP for an ODE, ReliableComputing 7(6): 449-465, 2001.
[Nor94] J.P. Norton (Ed.), Special issue on bounded-error estimation 1, International Journal ofAdaptive Control and Signal Processing 8(1): 1-118,1994.
[Nor95] J.P. Norton (Ed.), Special issue on bounded-error estimation 2, International Journal ofAdaptive Control and Signal Processing 9(1): 1-132, 1995.
[PB46] R.L. Plackett, J.P. Burman, Design Of Optimal Multifactorial Experiments,Biometrica 23: 305-325, 1946.
[PNDW04] B.T. Polyak, S.A. Nazin, C. Durieu, E. Walter, Ellipsoidal parameter or state estimationunder model uncertainty, Automatica 40, 1171 – 1179, 2004.
[PP98] M.S. Petkovic, L.D. Petkovic, Complex interval arithmetic and its applications, Wiley-VCH,Berlin, 1998.
[PRV03a] P. Poignet, N. Ramdani, A. Vivas, Approche ellipsoïdale factorisée pour l’estimation deparamètres dynamiques physiques de robots parallèles, APII-Journal Européen desSystèmes Automatisés 37(9):1111-1127, 2003.
[PRV03b] P. Poignet, N. Ramdani, A. Vivas, Ellipsoidal estimation of parallel robot dynamicparameters, Proceedings of IEEE/RSJ IROS 2003, pp. 3300-3305.
[PRV03c] P. Poignet, N. Ramdani, A. Vivas, Robust estimation of parallel robot dynamicparameters with interval analysis, Proceedings 42th IEEE Conference on Decision andControl, CDC2003, Maui, USA, pp. 6503-6508.
[PTVF92] W.H. Press, S.A. Teukolsky, W.T. Vetterling, B.P. Flannery, Numerical Recipes in C, The Artof Scientific Computing, University Press, Cambridge, 1992.
[Rah98] N. Rahni, Validation de modèles et variabilité des paramètres : analyse de sensibilité etd’incertitude, procédures d’optimisation - application à la thermique du bâtiment, Thèse del’université Paris XII – Val de Marne, 1998.
[Raï04] T. Raïssi, Méthodes ensemblistes pour l'estimation détat et de paramètres, Thèse de Doctorat del’université Paris XII Val de Marne, 2004.
[Ram94] N. Ramdani, Validation expérimentale et analyse de signaux : Développement d'uneméthodologie de comparaison modèle/mesures en Thermique du Bâtiment, Thèse de de Doctoratl’université Paris XII - Val de Marne, 1994.
[RC96] L. B. Rall, G. F. Corliss, Introduction to automatic differentiation, In: ComputationalDifferentiation: Techniques, Applications, and Tools. SIAM: Philadelphia, 1-18, 1996.
[RC96] N. Ramdani, Y. Candau, A new methodology to improve the accuracy of dynamicthermal modelling by comparison to experiment, in D. Lemonnier, J.B. Saulnier, M.Fiebig, (eds.), Advanced concepts and techniques in thermal modelling, 291-297, Elsevier, 1996.
[RCD+97] N. Ramdani, Y. Candau, S. Dautin, S. Delille, N. Rahni, P. Dalicieux, How to improvebuilding thermal simulation program by use of spectral analysis, Energy and Buildings25(3): 223-242, 1997.
[RCD94] N. Ramdani, Y. Candau, P. Dalicieux, Linear model identification as a tool for empiricalmodel validation of dynamic building energy simulation models, proc. 4th SSB, Liège,pp.371-386, 1994.
[RCGD05] N. Ramdani, Y. Candau, G. Guyon, C. Dalibart, Sensitivity analysis of dynamic models touncertainties in inputs data with time-varying variances, Technometrics, à paraître en2005.
[Rec67] R.L. Rechtschaffner, Saturated fraction of 2n and 3n factorial design, Technometrics 9(4),1967.
[RFC97] G. Romero, J. M. Flaus and A. Cheruy, Semiqualitative modelling of bioprocesses, Journalof Mathematical Modelling 3(3) : 246-264, 1997.
[Rih94] R. Rihm, Interval methods for initial value problems in ODEs, in Topics in Validatedcomputations: proceedings of the IMACS-GAMM International Workshop on ValidatedComputations, University of Oldenburg, J. Herzberger, ed. Elsevier Studies inComputational Mathematics, Elsevier, Amsterdam, New York, 1994.
[Rih98] R. Rihm, Implicit methods for enclosing solutions of ODEs, Journal of Universal ComputerScience 4(2), 1998.
[RIRC03] T. Raïssi, L. Ibos, N. Ramdani, Y. Candau, Analyse de spectres de relaxation diélectriquepar arithmétique d’intervalles, NUMELEC2003, Toulouse, CD-Rom 2003.
[RIRC04] T. Raïssi, L. Ibos, N. Ramdani, Y. Candau Guaranteed method for the estimation ofdielectric relaxation models parameters, IEEE International Conference on Solid DielectricsICSD 2004, Toulouse.
[RIRC05] T. Raïssi, L. Ibos, N. Ramdani, Y. Candau, Analyse de spectres de relaxation diélectriquepar arithmétique d’intervalles, Revue Internationale de Génie Electrique 8(1):97-117, 2005.
[RL71] J. Rokne, P.Lancaster, Complex interval arithmetic. ACM 14: 111-112, 1971.
[RO03] N. Ramdani, J. Ojalvo, A software for validating complex systems dynamic models: acase study in building thermal physics, Proc. IEEE-SMC/IMACS CESA’2003, Modeling,Analysis and Control, Lille, CD-ROM 2003.
[RP03] N. Ramdani, T. Poinot, Nonlinear system identification in presence of nuisanceparameters, Proc. ECC 2003, IEEE/IFAC European Control Conference, Cambridge, UK,2003.
[RP05] N. Ramdani, P. Poignet, Robust dynamic experimental identification of robots with setmembership uncertainty, IEEE/ASME Transactions on Mechatronics 10(2):253-256, 2005.
[RP06] N. Ramdani, P. Poignet, Parallel Robot Dynamic Model Evaluation with Set MembershipEstimation, 14th IFAC Symposium on System Identification 2006, soumise.
[RRC+05] N. Ramdani, T. Raïssi, Y. Candau, A. Boudenne, L. Ibos, Set membership parameteridentification with complex intervals using polar forms, IFAC World Congress Praha05,July 2005.
[RRC03a] T. Raïssi, N. Ramdani, Y. Candau, Guaranteed state estimation for nonlinear continuoustime systems with taylor models, in Proc. 13th IFAC Symposium on System Identification,SYSID2003, Rotterdam, pp.1725-1730.
[RRC03b] T. Raïssi, N. Ramdani, Y. Candau, Parameter estimation for nonlinear continuous-timesystems in a bounded error context, Proceedings 42th IEEE Conference on Decision andControl, CDC2003, Maui, USA, pp.2240-2245.
[RRC03c] T. Raïssi, N. Ramdani, Y. Candau, Estimation d’etat pour des systemes decrits par desequations differentielles non-lineaires dans un contexte à erreurs bornées, actes desJDA2003, pp.341-346.
[RRC04] T. Raïssi, N. Ramdani, Y. Candau, Set membership state and parameter estimation forsystems described by nonlinear differential equations, Automatica 40(10):1771-1777, 2004.
[RRC05] T. Raïssi, N. Ramdani, Y. Candau, Bounded-error moving horizon state estimator fornon-linear continuous-time systems : application to a bioprocess system, Journal of ControlProcess 15(5):537-545, 2005.
[RRC06] T. Raïssi, N. Ramdani, Y. Candau, Robust nonlinear continuous-time state estimationusing interval taylor models, 5th IFAC Symposium on Robust Control Design, soumise.
[RRCD95] N. Rahni, N. Ramdani, Y. Candau, P. Dalicieux, Sensitivity analysis of dynamic buildingsenergy simulation models using group screening and sampling methods, Proc. SAMO’95,Belgirate, pp.14-16, 1995.
[RRCD97] N. Rahni, N. Ramdani, Y. Candau, P. Dalicieux, Application of group screening todynamic buildings energy simulation models, Journal of Statistical Computation Simulation57(1-4): 285-304, 1997.
[RRCG98a] N. Rahni, N. Ramdani, Y. Candau, G. Guyon, Application of exact differential screeninganalysis to dynamic building energy simulation models, in J.Henriette, P.Lybaert,, M. ElHayeck (eds.), Advanced concepts and techniques in thermal modelling, pp. 99-106, Elsevier,1998.
[RRCG98b] N. Rahni, N. Ramdani, Y. Candau, G. Guyon, Regression analysis and dynamic buildingsenergy models, proc. SAMO’98, Venice, pp.211-214, 1998.
[RRCG99] N. Rahni, N. Ramdani, Y. Candau, G. Guyon, New experimental validation and modelimprovement tools for the clim2000 energy simulation software, proc. BuildingSimulation’99, Kyoto, vol.3: 1431-1437, 1999.
[RRCI05] N. Ramdani, T. Raïssi, Y. Candau, L. Ibos, Complex Interval Constraint Propagation forNon Linear Bounded-Error Parameter Identification, 44th IEEE conference on Decision andControl and European Control Conference, December 2005.
[RRIC04] T. Raïssi, N. Ramdani, L. Ibos, Y. Candau, Analyse de propriétés diélectriques dans uncontexte à erreurs bornées, CIFA 2004, Confèrence Internationale Francophone d’Automatique,Novembre 2004, Douz, Tunisie.
[RRIC05] T. Raïssi, N. Ramdani, L. Ibos, Y. Candau, A reliable method for the estimation ofdielectric relaxation models parameters, 5AI Int. Conf. Inverse Problems in Engineering:Theory, Practice, July 2005, Cambridge, UK.
[RTJC01] N. Ramdani, M. Tayakout-Fayolle, C. Jallut, Y. Candau, Etude de cas de l'identifiabilitéstructurelle en thermique, Actes des JIME2001, Vandœuvre-lès-Nancy, 2001.
[SAV02] M. Á. Sainz, J. Armengol, J. Vehí, 2002, Fault detection and isolation of the three-tanksystem using the modal interval analysis, Journal of Process Control 12(2): 325-338.
[Sch68] F.C. Schweppe, Recursive state estimation: Unknown but bounded errors and systeminputs, IEEE Transactions on Automatic Control AC-13(1): 22-28, 1968
[Sch89] M. Schetzen, The Volterra and Wiener theories for nonlinear systems, Krieger, Florida, 1989.
[Sed98] E. Sedda, Estimation en ligne de l’état et des paramètres d’une machine asyn-chrone par filtrage àerreur bornée et par filtrage de Kalman, Thèse de Doctorat, ENS Cachan, 1998.
[SF01] X.F. Sun, Y.Z. Fan, Comments on "Identification for systems with bounded noise", IEEETransactions on Automatic Control 46(5): 808–809, 2001.
[Sun58] T. Sunaga, Theory of interval algebra and its application to numerical analysis, In: RAAGMemoirs, Ggujutsu Bunken Fukuy-kai. Tokyo, Vol. 2, 1958, pp. 29-46 (547-564).
[Tan98] E. Tang-Kwor, Contribution au développement de méthodes périodiques de mesure de propriétésthermophysiques des matériaux opaques, Thèse de l’université Paris XII Val-de-Marne, 1998.
[Tan98] E. Tang-Kwor, Contribution au développement de méthodes périodiques de mesure de propriétésthermophysiques des matériaux opaques, Thèse de l'Université Paris XII VdM, 1998.
[TAR03a] B. Telle, M. J. Aldon, N. Ramdani, 3D guaranteed visual sensing based on intervalanalysis, Proceedings of IEEE/RSJ IROS 2003, pp. 1566-1571
[TAR03b] B. Telle, M. J. Aldon, N. Ramdani, Camera calibration and 3D reconstruction usinginterval analysis, Proc. ICIAP2003, IEEE Computer Society, ISBN:0-7695-1948-2, pp.374-380
[TR95] L. Tabary, N. Ramdani, An error analysis method applied to a building simulationsoftware : an example of application and its results, Proc. Building Simulation'95, Madison,USA, pp.316-323, 1995.
[TWS97] G. Tan, C. Wen, Y.C. Soh, Identification for systems with bounded noise, IEEETransactions on Automatic Control 42(7): 996–1001, 1997.
[VFA03] H. Valdés-González, J.M. Flaus, G. Acuña, Moving horizon state estimation with globalconvergence interval techniques: application to biotechnological processes, Journal ofProcess Control 13: 325–336, 2003.
[Vil05] R. Villamizar Mejia, Robust Control of Systems subjected to uncertain disturbances and actutaordynamics, PHD thesis, Universitat de Girona, 2005
[VS94] J.Vlach, K.Singhal, Computer methods for Circuit Analysis and Design, 2nd ed., 1994, VanNostrant Reinhold.
[VZ96] A. Vicino, G. Zappa, Sequential approximation of feasible parameter sets foridentification with set membership uncertainty, IEEE Trans. Automatic Control, 41(6): 774-785, 1996.
[Wal75] D. L. Waltz, Generating semantic descriptions from drawings of scenes with shadows, InP. H. Winston, The psychology of computer vision, pp. 19–91, New York: McGraw-Hill, 1975.
[Wal90] E. Walter E. (Ed.), Special issue on parameter identification with error bound, Mathematicsand Computer in Simulation 32: 447-607, 1990.
[War56] M. Warmus, Calculus of Approximations, Bulletin de l'Académie Polonaise de Sciences, 1956,Vol. 4, No. 5, pp. 253-257.
[War61] M. Warmus, Approximations and Inequalities in the Calculus of Approximations.Classification of Approximate Numbers, Bulletin de l'Académie Polonaise des Sciences SerieSciences Math. Astronomie Physique, 1961, Vol. 9, pp. 241-245.
[Wat61] G.S. Watson, A Study Of The Group Screening Method, Technometrics 3(3): 371-388, 1961.
[Wit68] H.S. Witsenhausen, Sets of possible states of linear systems given perturbed observations,IEEE Transations on Automatic Control 13(5): 56–58.
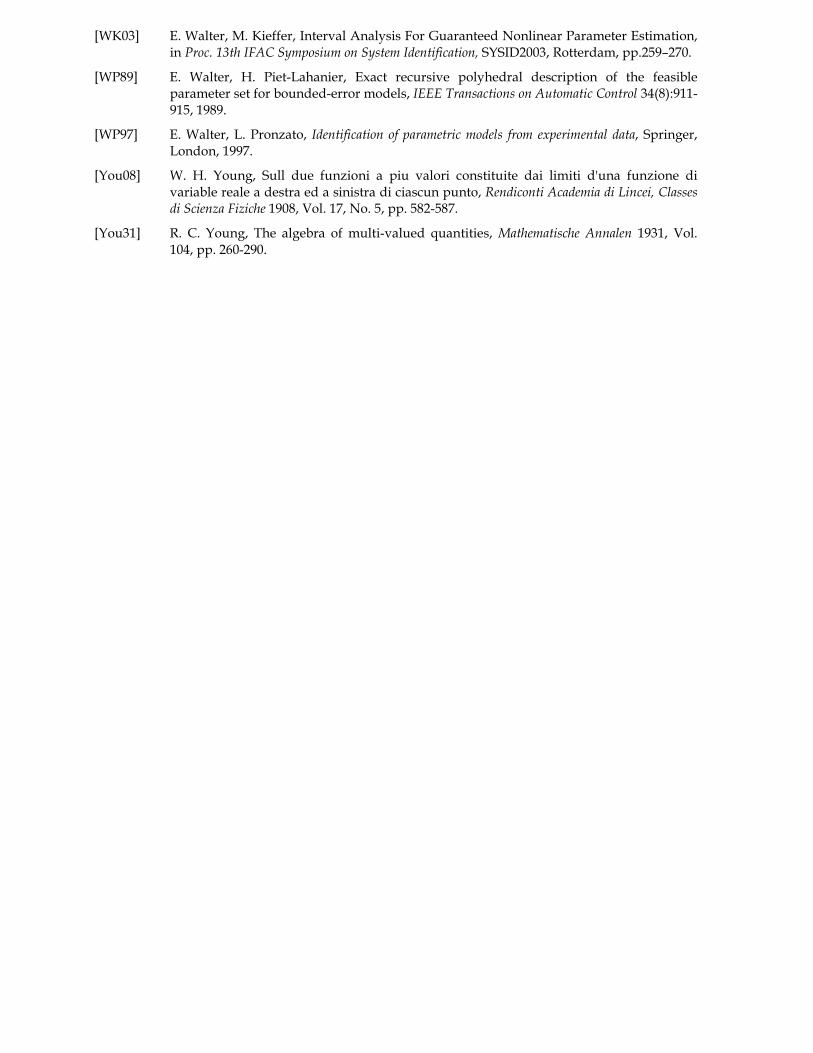
[WK03] E. Walter, M. Kieffer, Interval Analysis For Guaranteed Nonlinear Parameter Estimation,in Proc. 13th IFAC Symposium on System Identification, SYSID2003, Rotterdam, pp.259–270.
[WP89] E. Walter, H. Piet-Lahanier, Exact recursive polyhedral description of the feasibleparameter set for bounded-error models, IEEE Transactions on Automatic Control 34(8):911-915, 1989.
[WP97] E. Walter, L. Pronzato, Identification of parametric models from experimental data, Springer,London, 1997.
[You08] W. H. Young, Sull due funzioni a piu valori constituite dai limiti d'una funzione divariable reale a destra ed a sinistra di ciascun punto, Rendiconti Academia di Lincei, Classesdi Scienza Fiziche 1908, Vol. 17, No. 5, pp. 582-587.
[You31] R. C. Young, The algebra of multi-valued quantities, Mathematische Annalen 1931, Vol.104, pp. 260-290.





























