Embed Size (px)
Citation preview

Human Performance
と身体

立ち方(自然体)
• しっかりと地に足がついている
• 上半身の無駄な力が抜けている
• 状況の変化に柔軟に対応できる
○腰腹感覚→帯×寄りかかる立ち方
(斉藤孝:身体感覚を取り戻す,NHKブックス,2000)

立ち方(バレエ)
(参考文献:ボリショイバレエの技法)
1番 2番 3番 4番 5番(前面) 5番(側面)
膝関節を屈曲して腰部を下ろしていく運動をプリエという途中までの状態は(ドゥミプリエ)と最後まで腰部を下ろした状態は(グランプリエ)

四股立ち
• 足を広げて,腰を落す
• 下半身の土台に上半身が乗る×上体が前に傾く
• 四股はゆっくり踏む(踏み足で地を掴む)

足
• 縦のアーチ→直立二足歩行
• 横のアーチ→把持機能
• 靴生活→横アーチ扁平→第1中足骨内反,親指外反→足裏筋・靭帯の低下→扁平足
• 回内・回外の減少→扁平脛骨(ひし形に近い)から三角へ

座り方
• 正座-両膝を折りたたみ踵を尻につける躾→居住まいを正す(心身を律する)
背筋を伸ばす
• 胡坐-足裏を反対側の太腿の上に乗せる釈迦が菩提樹の下で悟りを開いた坐法(結跏趺坐)
上半身リラックス,下半身緊張
• 蹲踞-大地の上で衣服を汚すことなく休息する姿勢踵も地面に着く,踵が浮く-足指の付け根の感覚=安定

重心
• 重力:身体の全ての部分に作用
• 重心:各部分に働く重力作用の合成点*姿勢によっては身体内にあるとは限らない

比重心高(年齢別)
55.2
55.4
55.6
55.8
56.0
56.2
56.4
56.6
56.8
57.0
57.2
6 7 8 9 10 11 12 13 14 15
�N �î
�ä�d�S��
�j �q
���q

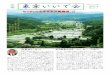
比重心高(種目別)
54.054.555.055.556.056.557.0
体操
水泳
柔道
重量挙
ボクシング
相撲
空手
テニス
弓道
ボート
スケート
スキー
山岳
卓球
剣道
自転車
バレー
野球
サッカー
ホッケー
バスケ
ラグビー
• 上体の筋群の発達を必要とする種目は比重心高が高い.

体重計の利用
• 重心位置Z
• 体重W
• 体重計wa
• 体重計までの距離L
• モーメント:力×距離
• ZW=Lwa
• ∴z=Lwa/W
秋田式重心測定法

写真法
• 頭
• 頚
• 上腕
• 前腕
• 手
•胴
•大腿•下腿•足

部分重心
部位 区間 男子 女子頭 頭頂―耳珠 0.63 0.63頚 耳珠―胸骨上縁 0.50 0.50胴 胸骨上縁―大転子 0.52 0.52上腕 肩関節―肘関節 0.46 0.46前腕 肘関節―手首 0.41 0.42手 手中央 0.50 0.50大腿 大転子―膝関節 0.42 0.42下腿 膝関節―足首 0.41 0.42足 足中央 0.50 0.50

内分質量比
合成部位 群 男子 女子頭:頚 0.43 0.41頭+頚:胴 0.86 0.89前腕:手 0.36 0.32上腕:前腕+手 上肢 0.46 0.43下腿:足 0.26 0.23大腿:下腿+足 下肢 0.42 0.38頭+頚+胴:下肢 0.38 0.40頭+頚+胴+下肢:上肢 全身 0.10 0.09

重心合成作図
• 各部位の部分重心を比に基づき求める
• 左右非対称の場合は左右の中点を取る
• 求めた重心同士の内分比により合成する
0.41 0.50
0.36

身体重心質量比 質量中心比 x y x y
頭 0.069 0.82 top 0.424 1.538 頭 0.191 頭重心 0.300 1.443胴 0.489 0.493 head 0.272 1.422上腕 0.027 0.529 shoulder0.072 1.468 肩-大転子 0.467 胴重心 -0.129 1.581前腕 0.016 0.415 hip -0.336 1.696手 0.006 0.891 Left Right大腿 0.11 0.475 knee -0.097 1.379 knee -0.232 1.281 左 右 x y下腿 0.051 0.406 ankle -0.152 0.929 ankle -0.553 1.030 膝-大転子 0.397 大腿重心 -0.222 1.546 0.428 大腿重心 -0.287 1.499足 0.011 0.595 tou 0.006 0.819 tou -0.445 0.903 足首-膝 0.454 下腿重心 -0.119 1.196 0.407 下腿重心 -0.362 1.179
1 Left Right 足先-足首 0.192 足重心 -0.058 0.864 0.166 足重心 -0.489 0.955elbow 0.018 1.162 0.018 1.162wrist -0.018 0.883 -0.018 0.883 肘-肩 0.311 上腕重心 0.044 1.306finger -0.003 0.747 -0.003 0.747 手首-肘 0.282 前腕重心 0.003 1.046
指-手首 0.136 手重心 -0.004 0.762
合成重心 -0.127 1.462
0.750
0.950
1.150
1.350
1.550
1.750
-0.600 -0.400 -0.200 0.000 0.200 0.400 0.600
Stick
PCG
CG

0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
-1 -0.5 0 0.5 1 1.5 2
head
body
leg_L
leg_R
arm
CG
0
0.75
1.5
2.25
-0.75 0 0.75 1.5 2.25
head
body
leg_L
leg_R
arm
CG
Vx
Vy V
θv
θbody
身体角 飛び出し角
離台時間

安定
• 重心位置と接地
•重心位置が接地面より外れると転ぶ•接地面広いと安定•重心位置が低いと安定

重心と浮心
• 重心と浮心が鉛直線上にある場合(図上左)
• 水面でキヲツケ姿勢をとると脚が沈降 (図右上)
• け伸び姿勢で,脚の沈降を抑制できる.(図右下)
重心浮心
水中トルク

足圧中心
• 床反力が作用する代表点
• 身体重心と足圧中心の関係で回転する
• 静止している場合、足圧中心から上げた垂線上に身体重心が位置する
• 身体重心に対して先行運動してバランス保持
• 安定には広い支持基底面が必要

姿勢制御
0.00
20.00
40.00
60.00
80.00
100.00
120.00
140.00
160.00
180.00
-30-1501530
水平座標
鉛直座標 系列1
0.00
20.00
40.00
60.00
80.00
100.00
120.00
140.00
160.00
180.00
-30-1501530
水平座標
鉛直座標 系列1
0.00
20.00
40.00
60.00
80.00
100.00
120.00
140.00
160.00
180.00
-30-1501530
水平座標
鉛直座標 系列1
0.0020.00
40.0060.00
80.00100.00
120.00140.00
160.00180.00
-30.0020.00
安静
前傾
後傾