Embed Size (px)
Citation preview
ICAM 1Promotion 107Année 2004-2005
Réalisé par : Fréneau CoralieDelessard Stéphanie
Questembert VincentDeroyer Julien
2
SOMMAIRE
Introduction
I Biographie de John Philip Holland (1841-1914)............................................................ 4 1) Ses premières années...................................................................................................... 4 2) Sa vie en tant que moine ................................................................................................ 4 3) Sa vie aux Etats-Unis ..................................................................................................... 5
II. Histoire du développement des sous-marins.............................................................. 7
1) Les Premiers Sous-marins.............................................................................................. 8 2) Les Guerres mondiales ................................................................................................... 8 3) Les Sous-marins après les deux Guerres Mondiales...................................................... 9
III. Les différents sous-marins......................................................................................... 10
1) Les SSK (Sous-marins Diesel): ……............................................................................10 2) Les SNA (Sous-marins Nucléaire d’Attaque) :............................................................ 10 3) Les SNLE (Sous-marins Nucléaire Lanceur d'Engins) : .............................................. 13 4) Les SNLE-NG (Sous-marins Nucléaire Lanceur d'Engins Nouvelle Génération) : .... 14
IV. Principe de plongée .................................................................................................... 15
1) Principe de Pascal......................................................................................................... 15 2) Le principe d’Archimède (principe de flottabilité) ...................................................... 17 3) Les ballasts et purges.................................................................................................... 19 4) Principe de l’assiette et de la gîte ................................................................................. 20
V. L’évolution des sous-marins du diesel au nucléaire .................................................... 21
1) Les sous-marins diesels électriques.............................................................................. 21 2) Les sous-marins nucléaires........................................................................................... 22
a) La réaction nucléaire ................................................................................................ 22 i Le principe de la fission ....................................................................................... 22 ii Le principe de la réaction en chaîne :.................................................................. 23
b) Fonctionnement du système : ................................................................................... 24 i Les différents constituants du réacteur à eau pressurisée : ................................. 25 ii Les trois circuits d’eau :....................................................................................... 25 iii Le cœur du réacteur : ........................................................................................... 26 iv Le générateur de vapeur ................................................................................. - 27 - v Le condenseur ................................................................................................. - 27 -
c) Le sous-marin AIP .............................................................................................. - 27 - Conclusion
Bibliographie
3
Introduction
Une innovation ne peut voir le jour que si un homme s’est consacré pleinement à son sujet et que son époque y est propice. Ainsi, l’ingénieur Irlandais John Philip Holland révolutionna la vision du monde sous-marin. En effet, il construisit le premier sous-marin véritablement opérationnel et le dota d’un système de propulsion mixte.
Cette découverte intrigue : en quoi le contexte historique et les innovations technologiques ont favorisé le développement des sous-marins ?
Dans une première partie, nous présenterons John Holland et son époque. Nous exposerons ensuite quelques généralités sur les différents sous-marins et leur système de plongée. Enfin, dans une dernière partie, nous nous intéresserons à l’évolution des moyens de propulsion.

4
I Biographie de John Philip Holland (1841-1914)
1) Ses premières années
Le père de John Holland travaillait comme cavalier pour le service britannique de
garde-côte. Il était affecté à la petite ville de Liscannor, avant que sa première épouse ne décède en janvier 1835. Plus tard, il épousa Mary Scanlan. Ensemble, ils eurent quatre enfants. Albert était l'aîné, et John, qui naquit le 24 février 1841 était leur deuxième enfant. Robert vit le jour le 1er juin 1845 et Michael, le 30 juillet 1847.
Peu d’éléments sur la jeunesse de John sont connus. Selon Richard Compton-Hall, il perdit son frère Robert et deux oncles pendant la grande famine de 1847. John alla probablement à l'école nationale Saint Macreehy à Liscannor et plus tard, le bruit court qu’il aurait marché 5 kilomètres pour aller à l'école secondaire des frères chrétiens à Ennistymon - vraisemblablement parce qu'ils proposaient un cours sur la navigation.
Le père de John se retira du service de garde-côte en 1853, et emmena sa famille à Limerick. Il mourut peu après le déménagement, laissant sa femme élever les trois garçons. John fut transféré de l'école chrétienne des frères d’Ennistymon, à l'école de rue de Sexton. Pendant cette période, Holland rencontra le frère Bernard O'Brien. Ce dernier était un scientifique et un excellent mécanicien qui se distingua en construisant plusieurs télescopes et divers appareils pour démontrer l'électromagnétisme.
A cette période, l'évêque demanda aux frères chrétiens de donner des cours pour adultes le soir et le dimanche. Étant peu qualifiés en tant que professeurs, les frères demandèrent à leurs étudiants plus doués de se porter volontaire. John Holland répondit à l'appel.
2) Sa vie en tant que moine
Holland rejoignit l'ordre des frères chrétiens irlandais, dont les voeux inclurent l'instruction gratuite. Il arriva au noviciat de Dublin le 15 juin 1858. Après une courte retraite, il devint notoire comme frère Philip. De brèves leçons sur la vie religieuse et d’autres sur la gestion des salles de classe suivirent. Le 3 novembre 1858, il fût affecté à l'école du monastère dans le Cork où il rencontra le frère James Dominic Burke. Ce frère était un
5
professeur de sciences renommé et un fondateur de la formation professionnelle en Irlande. Il démontrait les puissances de l'électricité dans la propulsion sous-marine aux expositions publiques pour le divertissement du peuple.
Holland était instituteur dans le Cork, quand la guerre civile commença. Il remarqua que le temps des navires de guerre en bois était passé, et que les bateaux blindés représentaient l’avenir. Il pensa alors que l'Angleterre les utiliserait et deviendrait la plus grande puissance navale au monde.
Le frère Philip fut transféré à Enniscorthy dans le comté de Wexford. Là, il développa un intérêt particulier pour le vol et commença à concevoir diverses machines.
En 1865, le frère Philip fut de nouveau transféré - cette fois à Drogheda. De vieux étudiants dans le Drogheda rappellent comment le frère Holland construisit un canard mécanique, ressemblant à un canard ordinaire, qui pouvait presque marcher dans le jardin et être mis dans l'eau pour nager, plonger et revenir à la surface. Ils racontent qu'Holland pouvait les maintenir en haleine pendant des heures.
En 1869, des frères fondèrent une école à Dundalk et le frère Philip fut transféré dans cette nouvelle école où il développa sa première embarcation submersible. 1872 fut une année pivot. La période du triennal se termina et il était temps pour lui de prononcer ses voeux perpétuels. La mère de Holland et son frère, Alfred, émigrèrent aux Etats-Unis, et le frère McConnell lança sa croisade pour rendre les écoles plus efficaces. Le frère McConnell commença à renvoyer les frères qui ne répondaient pas à ses normes. Le frère Philip renonça alors à ses voeux et le 26 mai 1873, John Philip Holland partit pour l'Amérique.
3) Sa vie aux Etats-Unis
Peu de temps après son arrivée à Boston, John glissa dans une rue glaciale et dut rester confiné dans ses appartements pendant un long mois. Ses pensées retournèrent aux problèmes de la navigation submersible. L'année suivante, John accepta un poste en tant que professeur à l'école paroissiale St. John.
Le frère de John Holland, Michael, le présenta aux membres de la confrérie irlandaise de Fenian en 1876. La confrérie avait regroupé des fonds pour financer des grèves contre les britanniques occupant l’Irlande. Ces fonds financèrent la construction des trois premiers sous-marins de John Holland. Cependant, des désaccords avec la tête de la confrérie de Fenian sur l'utilisation de l’argent se multiplièrent. En novembre 1883. John Holland rompit tout rapport avec la confrérie de Fenian.
Holland était âgé de 42 ans et choisit de ne pas retourner à l'école. Il prit un travail comme dessinateur chez Roland’s Iron Works à New York. L'année suivante, il accepta un poste à la compagnie Zalinski. Ce dernier commença à promouvoir l'idée d'un sous-marin armé d’un pistolet pneumatique. Ceci mena à la construction du bateau de Zalinski en 1886.
En 1888, le département de la marine des Etats-Unis annonça un concours général pour la conception d'un bateau submersible avec torpille qui devait répondre aux caractéristiques suivantes :
1. Vitesse : 15 noeuds en surface, 8 noeuds sous l’eau ; 2. Endurance : 2 heures sous l’eau, stockage de provisions pour 90 heures ; 3. Facilité de manoeuvre : périmètre du sous-marin inférieur à 4 fois sa longueur ; 4. Stabilité : flottabilité normale ou positive assurée à tout moment ;
6
5. Résistance de la structure : suffisante pour résister à une pression correspondant à 45 mètres de profondeur ; 6. Puissance de feu : torpilles. Les concurrents étaient le célèbre fabricant d’armes Suédois, Nordenfelt et Baker.
John Holland remporta cette compétition, mais aucun contrat ne fut signé. Découragé, John Holland reporta de nouveau son attention sur les problèmes du vol mécanique. Incapable de trouver un appui pour ses conceptions d'avion, il accepta un poste comme dessinateur à la compagnie Morris et Cummings Dredging.
Le 27 février 1893, un jeune avocat nommé Frost raconta à Morris qu'il avait l’intention de former une compagnie pour fournir à Holland l’argent nécessaire à ses expériences. Quand le congrès s'appropria $200.000 pour couvrir une autre compétition de bateau submersible le 3 mars 1893, Frost décida que le temps était venu. Peu de temps après, il rencontra John Holland et accepta de lui prêter la somme nécessaire pour préparer son offre. La compagnie Holland Torpédo Boat fut fondée aussitôt. Frost assuma le rôle de trésorier et Holland devint directeur général avec un salaire de $50.00 par mois.
Les archives de New York signalent que John Holland gagna la compétition en 1893 mais le conseil de la marine décida d'examiner le sous-marin de Baker, construit en 1891 et testé en 1892. En fin de compte, l'argent pour financer la construction d'un sous-marin fut détourné vers d'autres projets et la construction du plongeur fut retardée de deux ans.
La construction du sous-marin se fit lentement. Il y eut beaucoup de changements et de retards. En 1896, Holland se rendit compte que le sous-marin serait un échec. Il reçut l'approbation de la compagnie Holland Torpédo Boat pour construire son sixième sous-marin.
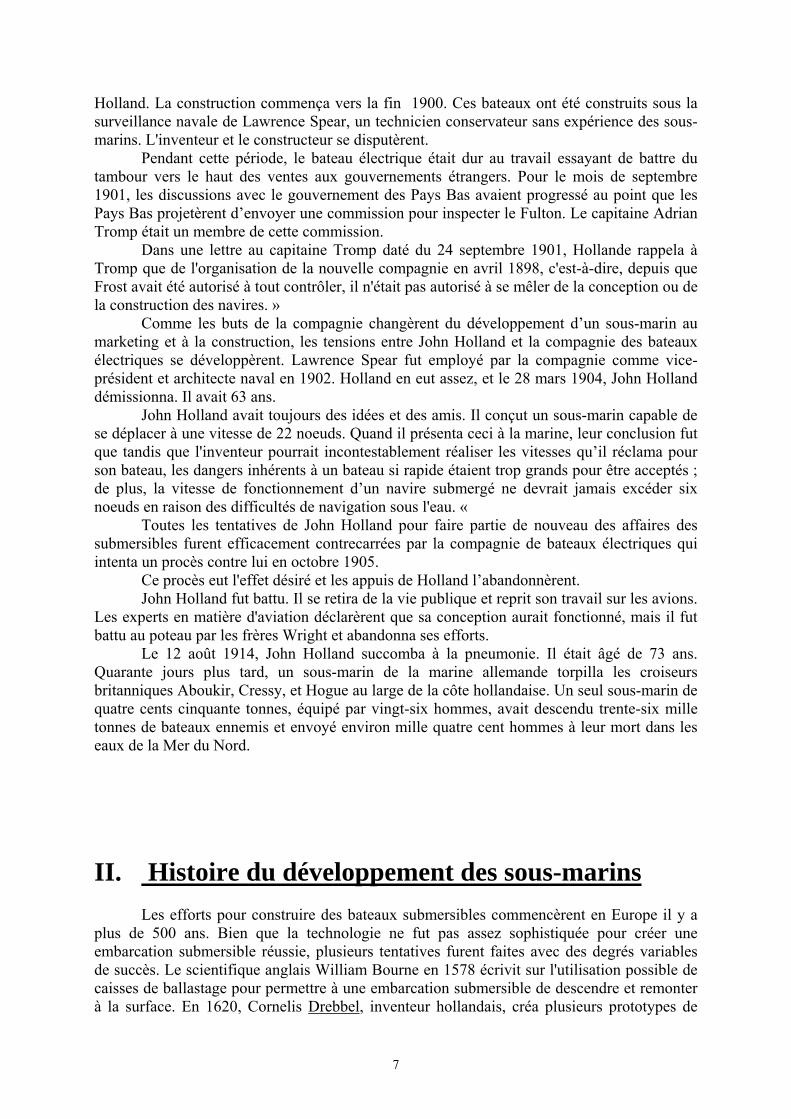
Le Holland VI prit forme sur les chantiers navals de Lewis Nixon dans le New Jersey. La construction continua tout au long de l'année 1897 et les tests commencèrent en mars de l’année suivante. Cable remplaça John Holland en tant que capitaine des essais à la fin 1898 suite à divers incidents. John Holland était âgé de 57 ans, mais son esprit ne cessa jamais de fonctionner. Il avait appris beaucoup pendant les essais du Holland VI et travailla dur à la conception d’un sous-marin amélioré. Les spécifications et les schémas furent expédiés à la marine en novembre 1899.
Rice fonda la compagnie des bateaux électriques en 1899 avec la compagnie Holland Torpédo Boat comme filiale. Sentant ce que le futur apporterait, Holland commença des discussions avec le capitaine Tromp des Pays Bas au sujet d’une nouvelle compagnie européenne qui construirait les sous-marins qu’il avait conçu. Le 16 juin 1900, Holland signa un contrat avec la compagnie des bateaux électriques :
• La compagnie des bateaux électriques employa Holland en tant qu'ingénieur conseil pendant cinq années à un salaire annuel de $10.000.
• En échange de tous ses brevets concernant les submersibles actuels et futurs, la compagnie des bateaux électriques lui donna 500 parts d'action privilégiée ayant une valeur marchande de $35.000.
L'achat du Holland VI le 11 avril 1900 mena à beaucoup de discussions concernant la taille de la flotte submersible et tout ce qui à trait aux sous-marins. La Loi navale d'appropriation du 7 juin 1900 prévoyait la construction de cinq bateaux améliorés de
7
Holland. La construction commença vers la fin 1900. Ces bateaux ont été construits sous la surveillance navale de Lawrence Spear, un technicien conservateur sans expérience des sous-marins. L'inventeur et le constructeur se disputèrent.
Pendant cette période, le bateau électrique était dur au travail essayant de battre du tambour vers le haut des ventes aux gouvernements étrangers. Pour le mois de septembre 1901, les discussions avec le gouvernement des Pays Bas avaient progressé au point que les Pays Bas projetèrent d’envoyer une commission pour inspecter le Fulton. Le capitaine Adrian Tromp était un membre de cette commission.
Dans une lettre au capitaine Tromp daté du 24 septembre 1901, Hollande rappela à Tromp que de l'organisation de la nouvelle compagnie en avril 1898, c'est-à-dire, depuis que Frost avait été autorisé à tout contrôler, il n'était pas autorisé à se mêler de la conception ou de la construction des navires. »
Comme les buts de la compagnie changèrent du développement d’un sous-marin au marketing et à la construction, les tensions entre John Holland et la compagnie des bateaux électriques se développèrent. Lawrence Spear fut employé par la compagnie comme vice-président et architecte naval en 1902. Holland en eut assez, et le 28 mars 1904, John Holland démissionna. Il avait 63 ans.
John Holland avait toujours des idées et des amis. Il conçut un sous-marin capable de se déplacer à une vitesse de 22 noeuds. Quand il présenta ceci à la marine, leur conclusion fut que tandis que l'inventeur pourrait incontestablement réaliser les vitesses qu’il réclama pour son bateau, les dangers inhérents à un bateau si rapide étaient trop grands pour être acceptés ; de plus, la vitesse de fonctionnement d’un navire submergé ne devrait jamais excéder six noeuds en raison des difficultés de navigation sous l'eau. «
Toutes les tentatives de John Holland pour faire partie de nouveau des affaires des submersibles furent efficacement contrecarrées par la compagnie de bateaux électriques qui intenta un procès contre lui en octobre 1905.
Ce procès eut l'effet désiré et les appuis de Holland l’abandonnèrent. John Holland fut battu. Il se retira de la vie publique et reprit son travail sur les avions.
Les experts en matière d'aviation déclarèrent que sa conception aurait fonctionné, mais il fut battu au poteau par les frères Wright et abandonna ses efforts.
Le 12 août 1914, John Holland succomba à la pneumonie. Il était âgé de 73 ans. Quarante jours plus tard, un sous-marin de la marine allemande torpilla les croiseurs britanniques Aboukir, Cressy, et Hogue au large de la côte hollandaise. Un seul sous-marin de quatre cents cinquante tonnes, équipé par vingt-six hommes, avait descendu trente-six mille tonnes de bateaux ennemis et envoyé environ mille quatre cent hommes à leur mort dans les eaux de la Mer du Nord.
II. Histoire du développement des sous-marins Les efforts pour construire des bateaux submersibles commencèrent en Europe il y a
plus de 500 ans. Bien que la technologie ne fut pas assez sophistiquée pour créer une embarcation submersible réussie, plusieurs tentatives furent faites avec des degrés variables de succès. Le scientifique anglais William Bourne en 1578 écrivit sur l'utilisation possible de caisses de ballastage pour permettre à une embarcation submersible de descendre et remonter à la surface. En 1620, Cornelis Drebbel, inventeur hollandais, créa plusieurs prototypes de
8
sous-marins ressemblant à deux bateaux en bois placés l’un sur l'autre et assemblés par une peau de cuir imperméable. Ceux-ci furent propulsés par des avirons qui émergèrent de la coque par des ouvertures. Selon des comptes rendus contemporains, Drebbel testa ses embarcations plusieurs fois sur la Tamise à Londres.
1) Les Premiers Sous-marins
Les deux siècles suivants, les scientifiques et les inventeurs en Amérique, Angleterre, France, Allemagne et Italie essayèrent de créer un véritable vaisseau de guerre submersible, mais avec peu de succès. Un sous-marin américain fut utilisé pour tenter de couler un bateau ennemi pendant la guerre (1775-1783). Les sous-marins continuèrent à être améliorés, et furent de nouveau employés pendant la guerre civile américaine (1861-1865).
La tortue fut conçue par l'inventeur américain David Bushnell pour lutter contre la flotte britannique bloquant New York en 1776. La tortue était une embarcation en forme d’œuf, légèrement plus grande qu'un homme et construite en bois. Son propre équipage ne pouvait déplacer l’embarcation qu’en actionnant un propulseur manuel. L'arme du bateau était une charge explosive qui pouvait être visée sur le dessous de la coque du bateau cible.
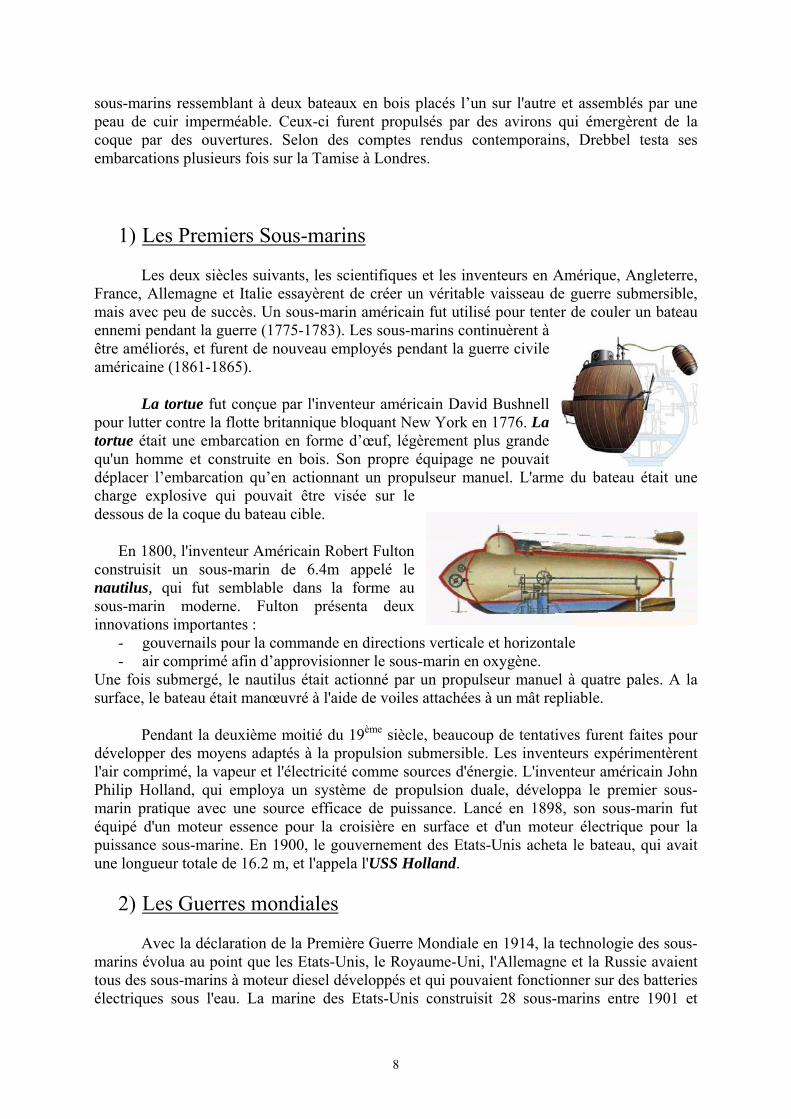
En 1800, l'inventeur Américain Robert Fulton construisit un sous-marin de 6.4m appelé le nautilus, qui fut semblable dans la forme au sous-marin moderne. Fulton présenta deux innovations importantes :
- gouvernails pour la commande en directions verticale et horizontale - air comprimé afin d’approvisionner le sous-marin en oxygène.
Une fois submergé, le nautilus était actionné par un propulseur manuel à quatre pales. A la surface, le bateau était manœuvré à l'aide de voiles attachées à un mât repliable.
Pendant la deuxième moitié du 19ème siècle, beaucoup de tentatives furent faites pour développer des moyens adaptés à la propulsion submersible. Les inventeurs expérimentèrent l'air comprimé, la vapeur et l'électricité comme sources d'énergie. L'inventeur américain John Philip Holland, qui employa un système de propulsion duale, développa le premier sous-marin pratique avec une source efficace de puissance. Lancé en 1898, son sous-marin fut équipé d'un moteur essence pour la croisière en surface et d'un moteur électrique pour la puissance sous-marine. En 1900, le gouvernement des Etats-Unis acheta le bateau, qui avait une longueur totale de 16.2 m, et l'appela l'USS Holland.
2) Les Guerres mondiales
Avec la déclaration de la Première Guerre Mondiale en 1914, la technologie des sous-marins évolua au point que les Etats-Unis, le Royaume-Uni, l'Allemagne et la Russie avaient tous des sous-marins à moteur diesel développés et qui pouvaient fonctionner sur des batteries électriques sous l'eau. La marine des Etats-Unis construisit 28 sous-marins entre 1901 et
9
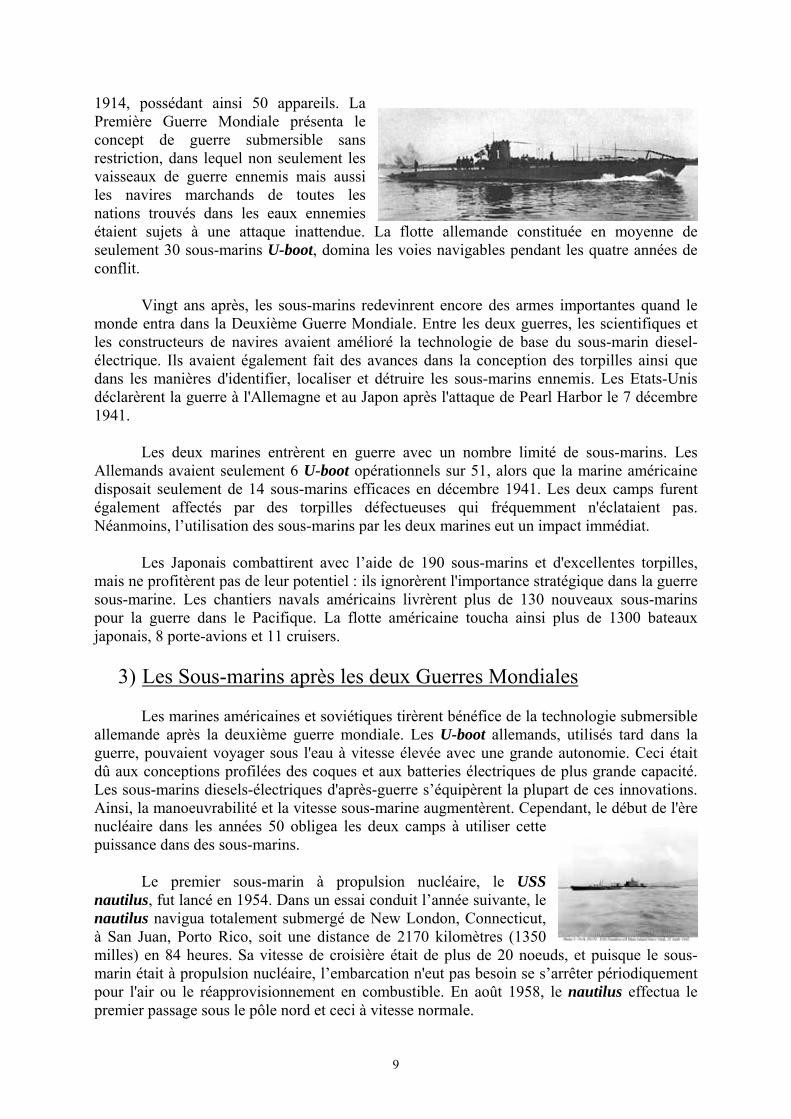
1914, possédant ainsi 50 appareils. La Première Guerre Mondiale présenta le concept de guerre submersible sans restriction, dans lequel non seulement les vaisseaux de guerre ennemis mais aussi les navires marchands de toutes les nations trouvés dans les eaux ennemies étaient sujets à une attaque inattendue. La flotte allemande constituée en moyenne de seulement 30 sous-marins U-boot, domina les voies navigables pendant les quatre années de conflit.
Vingt ans après, les sous-marins redevinrent encore des armes importantes quand le monde entra dans la Deuxième Guerre Mondiale. Entre les deux guerres, les scientifiques et les constructeurs de navires avaient amélioré la technologie de base du sous-marin diesel-électrique. Ils avaient également fait des avances dans la conception des torpilles ainsi que dans les manières d'identifier, localiser et détruire les sous-marins ennemis. Les Etats-Unis déclarèrent la guerre à l'Allemagne et au Japon après l'attaque de Pearl Harbor le 7 décembre 1941.
Les deux marines entrèrent en guerre avec un nombre limité de sous-marins. Les Allemands avaient seulement 6 U-boot opérationnels sur 51, alors que la marine américaine disposait seulement de 14 sous-marins efficaces en décembre 1941. Les deux camps furent également affectés par des torpilles défectueuses qui fréquemment n'éclataient pas. Néanmoins, l’utilisation des sous-marins par les deux marines eut un impact immédiat.
Les Japonais combattirent avec l’aide de 190 sous-marins et d'excellentes torpilles, mais ne profitèrent pas de leur potentiel : ils ignorèrent l'importance stratégique dans la guerre sous-marine. Les chantiers navals américains livrèrent plus de 130 nouveaux sous-marins pour la guerre dans le Pacifique. La flotte américaine toucha ainsi plus de 1300 bateaux japonais, 8 porte-avions et 11 cruisers.
3) Les Sous-marins après les deux Guerres Mondiales
Les marines américaines et soviétiques tirèrent bénéfice de la technologie submersible allemande après la deuxième guerre mondiale. Les U-boot allemands, utilisés tard dans la guerre, pouvaient voyager sous l'eau à vitesse élevée avec une grande autonomie. Ceci était dû aux conceptions profilées des coques et aux batteries électriques de plus grande capacité. Les sous-marins diesels-électriques d'après-guerre s’équipèrent la plupart de ces innovations. Ainsi, la manoeuvrabilité et la vitesse sous-marine augmentèrent. Cependant, le début de l'ère nucléaire dans les années 50 obligea les deux camps à utiliser cette puissance dans des sous-marins.
Le premier sous-marin à propulsion nucléaire, le USS nautilus, fut lancé en 1954. Dans un essai conduit l’année suivante, le nautilus navigua totalement submergé de New London, Connecticut, à San Juan, Porto Rico, soit une distance de 2170 kilomètres (1350 milles) en 84 heures. Sa vitesse de croisière était de plus de 20 noeuds, et puisque le sous-marin était à propulsion nucléaire, l’embarcation n'eut pas besoin se s’arrêter périodiquement pour l'air ou le réapprovisionnement en combustible. En août 1958, le nautilus effectua le premier passage sous le pôle nord et ceci à vitesse normale.
10
Des flottes de grande puissance se développèrent pour la course à l’armement durant la guerre froide entre les Etats-Unis et l'URSS. La taille des sous-marins augmenta considérablement. Après la chute de l'URSS en 1991, les flottes commencèrent à se réduire. A la fin du 20ème siècle, les Etats-Unis diminuèrent donc les commandes pour de nouveaux sous-marins, ceux-ci s’avérant de plus en plus coûteux. Une doctrine post guerre froide sur le combat en eaux peu profondes émergea. En conséquence, la marine américaine commença à élaborer sa tactique pour de futurs conflits.
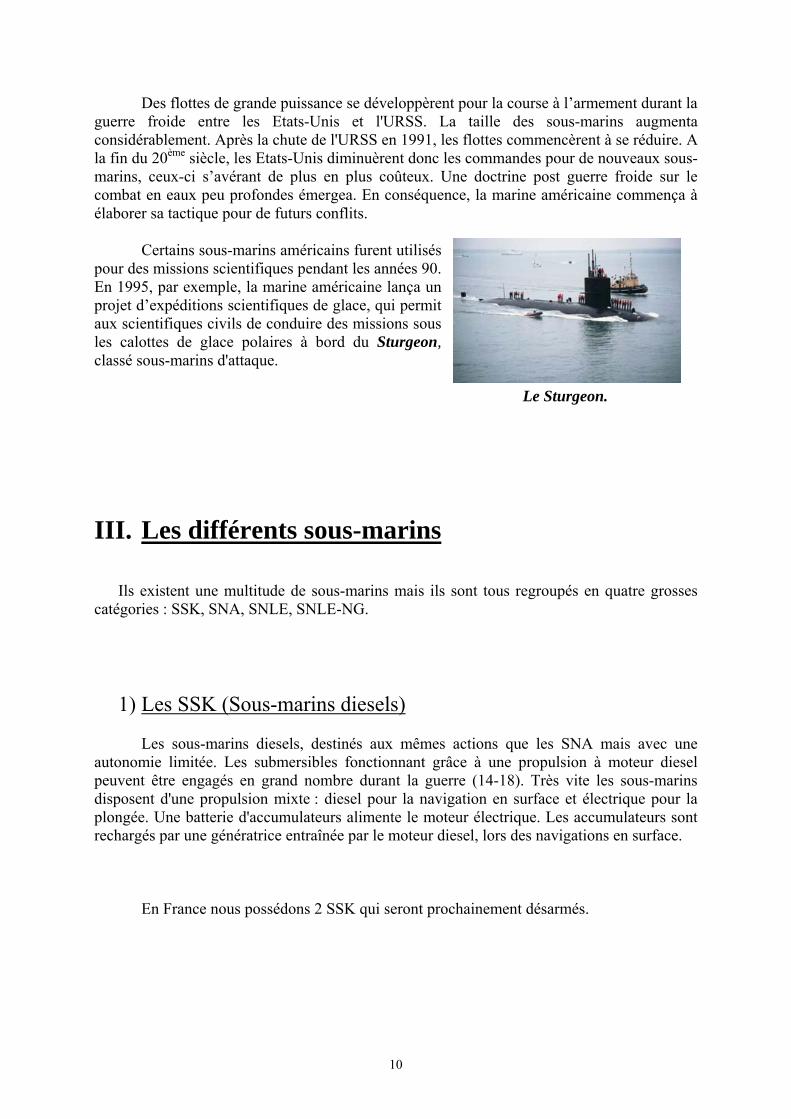
Certains sous-marins américains furent utilisés pour des missions scientifiques pendant les années 90. En 1995, par exemple, la marine américaine lança un projet d’expéditions scientifiques de glace, qui permit aux scientifiques civils de conduire des missions sous les calottes de glace polaires à bord du Sturgeon, classé sous-marins d'attaque.
III. Les différents sous-marins
Ils existent une multitude de sous-marins mais ils sont tous regroupés en quatre grosses catégories : SSK, SNA, SNLE, SNLE-NG.
1) Les SSK (Sous-marins diesels)
Les sous-marins diesels, destinés aux mêmes actions que les SNA mais avec une autonomie limitée. Les submersibles fonctionnant grâce à une propulsion à moteur diesel peuvent être engagés en grand nombre durant la guerre (14-18). Très vite les sous-marins disposent d'une propulsion mixte : diesel pour la navigation en surface et électrique pour la plongée. Une batterie d'accumulateurs alimente le moteur électrique. Les accumulateurs sont rechargés par une génératrice entraînée par le moteur diesel, lors des navigations en surface.
En France nous possédons 2 SSK qui seront prochainement désarmés.
Le Sturgeon.
11
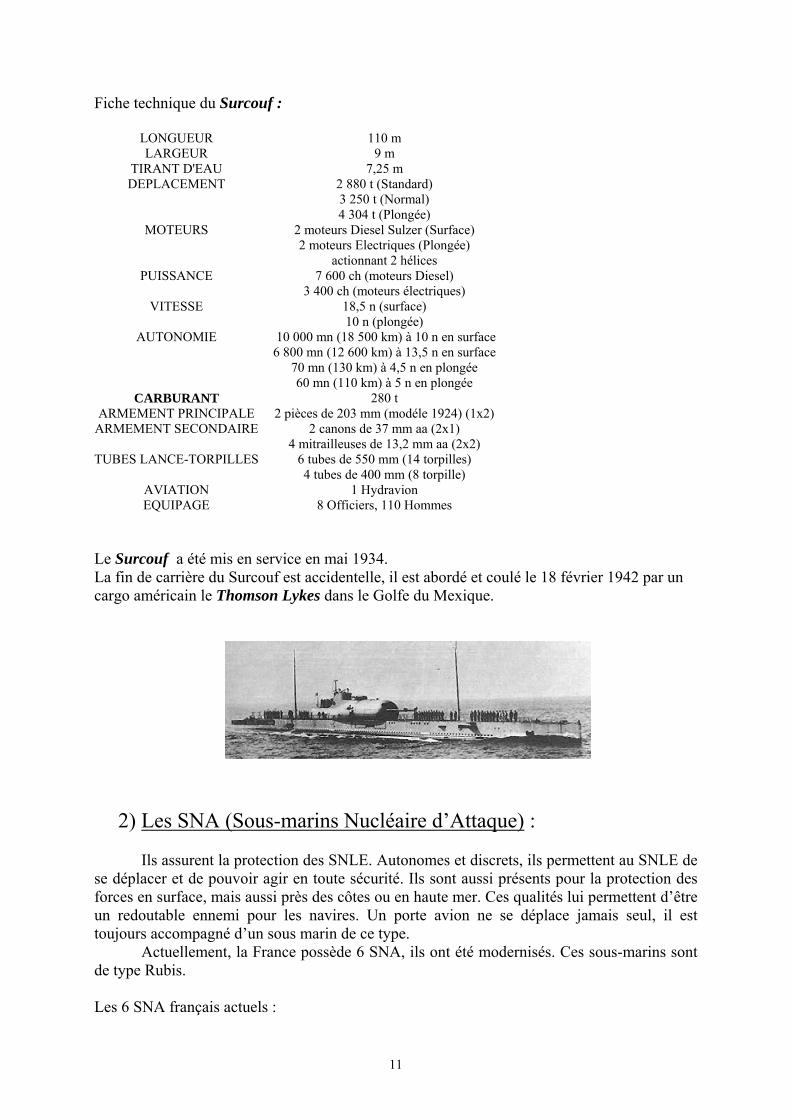
Fiche technique du Surcouf :
LONGUEUR 110 m LARGEUR 9 m
TIRANT D'EAU 7,25 m DEPLACEMENT 2 880 t (Standard)
3 250 t (Normal) 4 304 t (Plongée)
MOTEURS 2 moteurs Diesel Sulzer (Surface) 2 moteurs Electriques (Plongée)
actionnant 2 hélices PUISSANCE 7 600 ch (moteurs Diesel)
3 400 ch (moteurs électriques) VITESSE 18,5 n (surface)
10 n (plongée) AUTONOMIE 10 000 mn (18 500 km) à 10 n en surface
6 800 mn (12 600 km) à 13,5 n en surface 70 mn (130 km) à 4,5 n en plongée 60 mn (110 km) à 5 n en plongée
CARBURANT 280 t ARMEMENT PRINCIPALE 2 pièces de 203 mm (modéle 1924) (1x2)
ARMEMENT SECONDAIRE 2 canons de 37 mm aa (2x1) 4 mitrailleuses de 13,2 mm aa (2x2)
TUBES LANCE-TORPILLES 6 tubes de 550 mm (14 torpilles) 4 tubes de 400 mm (8 torpille)
AVIATION 1 Hydravion EQUIPAGE 8 Officiers, 110 Hommes
Le Surcouf a été mis en service en mai 1934. La fin de carrière du Surcouf est accidentelle, il est abordé et coulé le 18 février 1942 par un cargo américain le Thomson Lykes dans le Golfe du Mexique.
2) Les SNA (Sous-marins Nucléaire d’Attaque) :
Ils assurent la protection des SNLE. Autonomes et discrets, ils permettent au SNLE de se déplacer et de pouvoir agir en toute sécurité. Ils sont aussi présents pour la protection des forces en surface, mais aussi près des côtes ou en haute mer. Ces qualités lui permettent d’être un redoutable ennemi pour les navires. Un porte avion ne se déplace jamais seul, il est toujours accompagné d’un sous marin de ce type.
Actuellement, la France possède 6 SNA, ils ont été modernisés. Ces sous-marins sont de type Rubis. Les 6 SNA français actuels :
12
Rubis, Saphir, Casabianca, Emeraude, Améthyste, Perle L’Améthyste : C'est le 5ème sous-marin du type Rubis. Améthyste n'est pas seulement le nom d'une pierre précieuse mais signifie aussi AMElioration Tactique, HydrodYnamique, Silence, Transmission, Ecoute.
D’autres sous-marins remplaceront les actuels entre 2010 et 2020, ils seront de plus grande taille et ils s’appelleront « les Barracuda ». Fiche technique de L’Améthyste
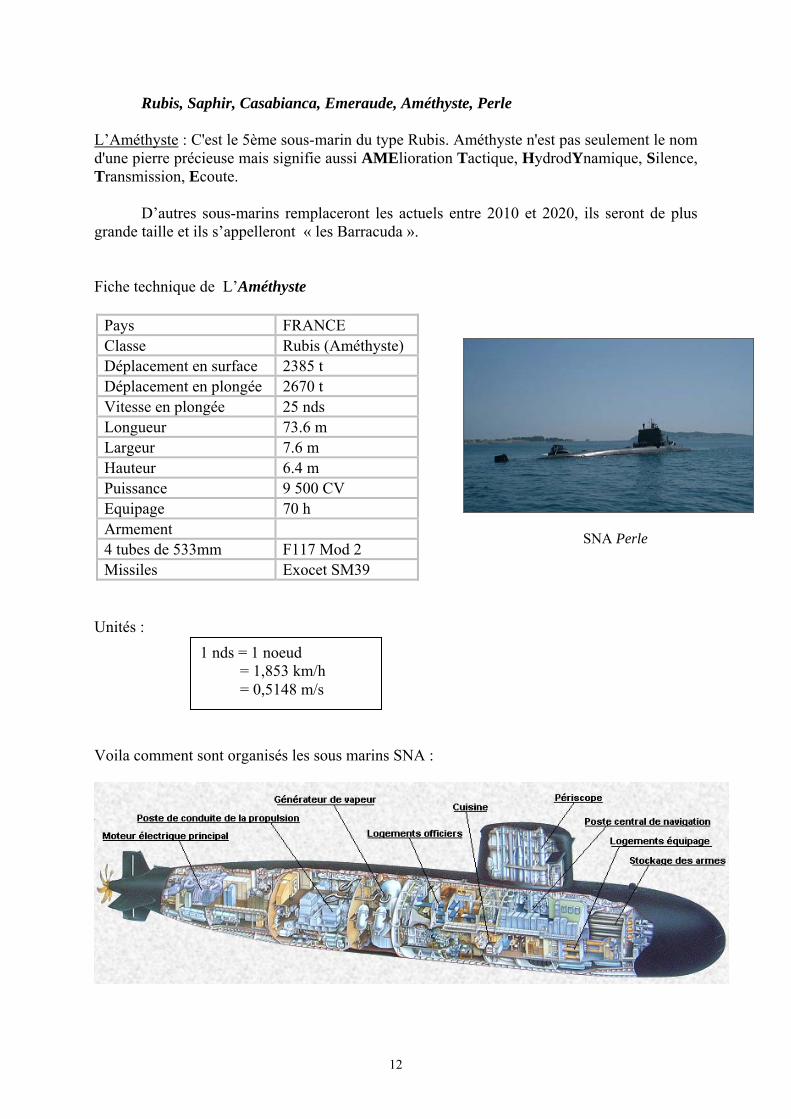
Unités : Voila comment sont organisés les sous marins SNA :
Pays FRANCE Classe Rubis (Améthyste) Déplacement en surface 2385 t Déplacement en plongée 2670 t Vitesse en plongée 25 nds Longueur 73.6 m Largeur 7.6 m Hauteur 6.4 m Puissance 9 500 CV Equipage 70 h Armement 4 tubes de 533mm F117 Mod 2 Missiles Exocet SM39
1 nds = 1 noeud = 1,853 km/h = 0,5148 m/s
SNA Perle
13
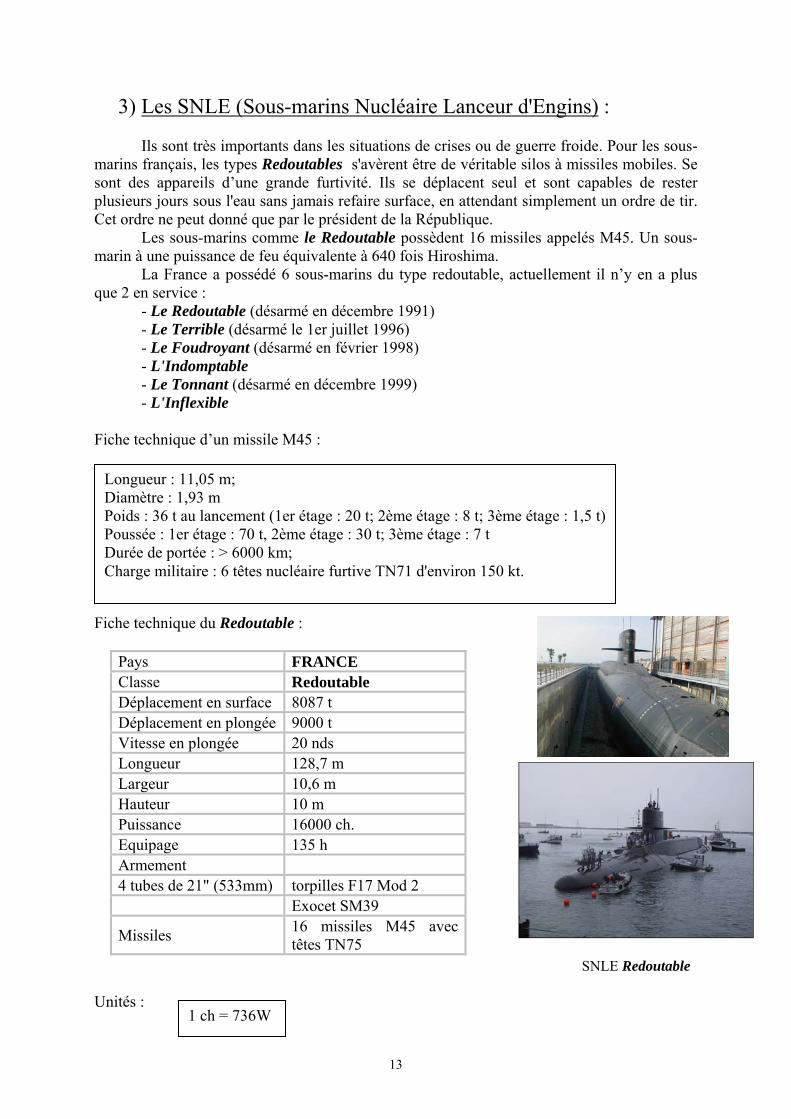
3) Les SNLE (Sous-marins Nucléaire Lanceur d'Engins) :
Ils sont très importants dans les situations de crises ou de guerre froide. Pour les sous-marins français, les types Redoutables s'avèrent être de véritable silos à missiles mobiles. Se sont des appareils d’une grande furtivité. Ils se déplacent seul et sont capables de rester plusieurs jours sous l'eau sans jamais refaire surface, en attendant simplement un ordre de tir. Cet ordre ne peut donné que par le président de la République.
Les sous-marins comme le Redoutable possèdent 16 missiles appelés M45. Un sous-marin à une puissance de feu équivalente à 640 fois Hiroshima.
La France a possédé 6 sous-marins du type redoutable, actuellement il n’y en a plus que 2 en service : - Le Redoutable (désarmé en décembre 1991)
- Le Terrible (désarmé le 1er juillet 1996) - Le Foudroyant (désarmé en février 1998) - L'Indomptable - Le Tonnant (désarmé en décembre 1999) - L'Inflexible
Fiche technique d’un missile M45 :
Fiche technique du Redoutable :
Pays FRANCE Classe Redoutable Déplacement en surface 8087 t Déplacement en plongée 9000 t Vitesse en plongée 20 nds Longueur 128,7 m Largeur 10,6 m Hauteur 10 m Puissance 16000 ch. Equipage 135 h Armement 4 tubes de 21" (533mm) torpilles F17 Mod 2 Exocet SM39
Missiles 16 missiles M45 avec têtes TN75
Unités :
Longueur : 11,05 m; Diamètre : 1,93 m Poids : 36 t au lancement (1er étage : 20 t; 2ème étage : 8 t; 3ème étage : 1,5 t) Poussée : 1er étage : 70 t, 2ème étage : 30 t; 3ème étage : 7 t Durée de portée : > 6000 km; Charge militaire : 6 têtes nucléaire furtive TN71 d'environ 150 kt.
SNLE Redoutable
1 ch = 736W
14
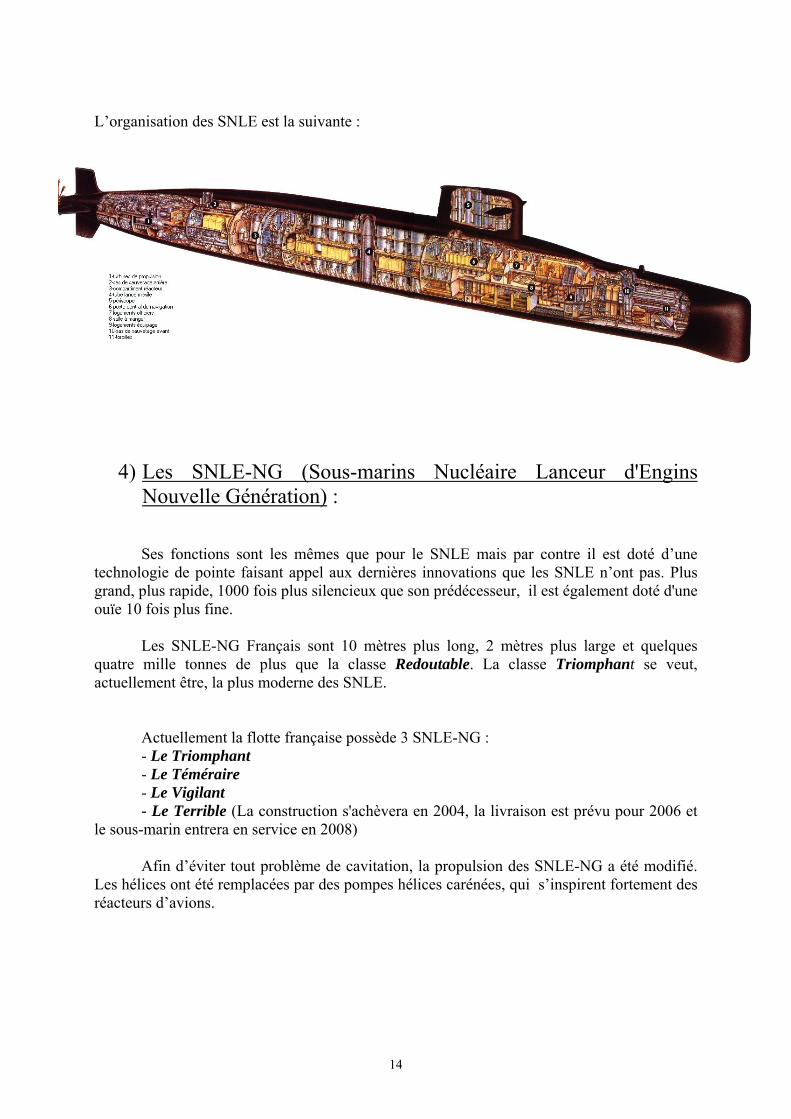
L’organisation des SNLE est la suivante :
4) Les SNLE-NG (Sous-marins Nucléaire Lanceur d'Engins Nouvelle Génération) :
Ses fonctions sont les mêmes que pour le SNLE mais par contre il est doté d’une technologie de pointe faisant appel aux dernières innovations que les SNLE n’ont pas. Plus grand, plus rapide, 1000 fois plus silencieux que son prédécesseur, il est également doté d'une ouïe 10 fois plus fine.
Les SNLE-NG Français sont 10 mètres plus long, 2 mètres plus large et quelques
quatre mille tonnes de plus que la classe Redoutable. La classe Triomphant se veut, actuellement être, la plus moderne des SNLE.
Actuellement la flotte française possède 3 SNLE-NG : - Le Triomphant - Le Téméraire - Le Vigilant - Le Terrible (La construction s'achèvera en 2004, la livraison est prévu pour 2006 et
le sous-marin entrera en service en 2008) Afin d’éviter tout problème de cavitation, la propulsion des SNLE-NG a été modifié.
Les hélices ont été remplacées par des pompes hélices carénées, qui s’inspirent fortement des réacteurs d’avions.
15
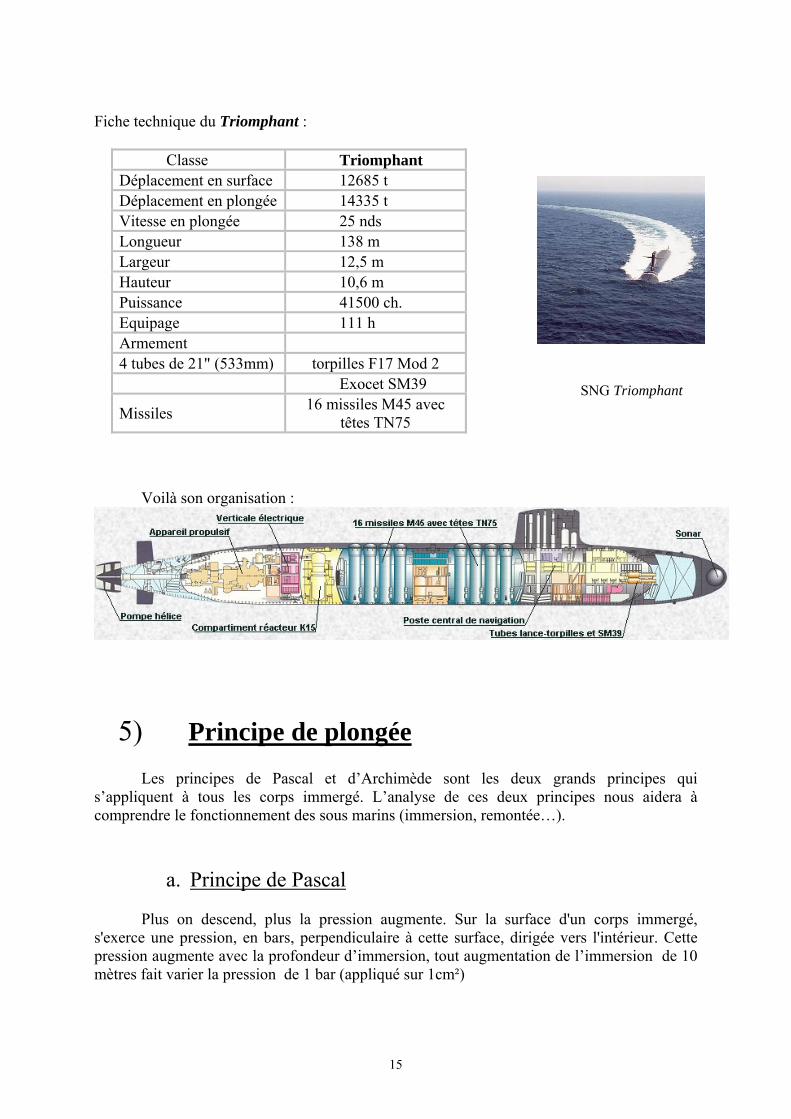
Fiche technique du Triomphant :
Classe Triomphant Déplacement en surface 12685 t Déplacement en plongée 14335 t Vitesse en plongée 25 nds Longueur 138 m Largeur 12,5 m Hauteur 10,6 m Puissance 41500 ch. Equipage 111 h Armement 4 tubes de 21" (533mm) torpilles F17 Mod 2
Exocet SM39
Missiles 16 missiles M45 avec têtes TN75
Voilà son organisation :
5) Principe de plongée
Les principes de Pascal et d’Archimède sont les deux grands principes qui s’appliquent à tous les corps immergé. L’analyse de ces deux principes nous aidera à comprendre le fonctionnement des sous marins (immersion, remontée…).
a. Principe de Pascal
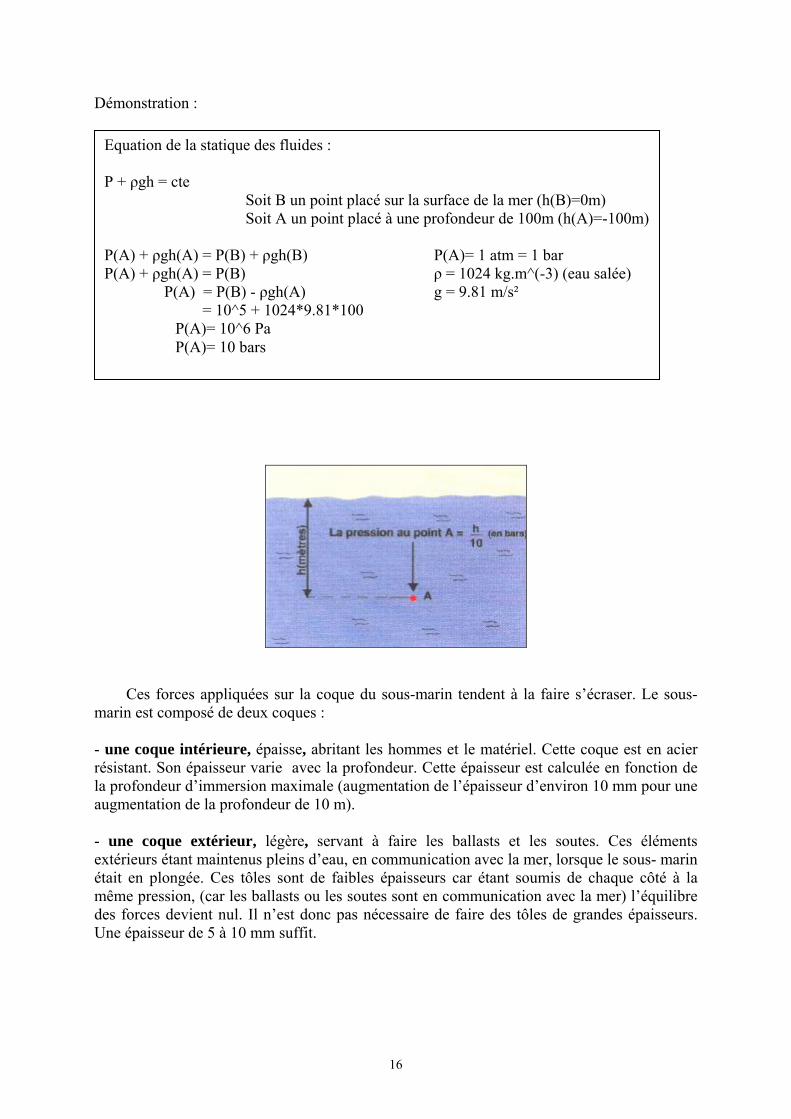
Plus on descend, plus la pression augmente. Sur la surface d'un corps immergé, s'exerce une pression, en bars, perpendiculaire à cette surface, dirigée vers l'intérieur. Cette pression augmente avec la profondeur d’immersion, tout augmentation de l’immersion de 10 mètres fait varier la pression de 1 bar (appliqué sur 1cm²)
SNG Triomphant
16
Démonstration :
Ces forces appliquées sur la coque du sous-marin tendent à la faire s’écraser. Le sous-marin est composé de deux coques :
- une coque intérieure, épaisse, abritant les hommes et le matériel. Cette coque est en acier résistant. Son épaisseur varie avec la profondeur. Cette épaisseur est calculée en fonction de la profondeur d’immersion maximale (augmentation de l’épaisseur d’environ 10 mm pour une augmentation de la profondeur de 10 m).
- une coque extérieur, légère, servant à faire les ballasts et les soutes. Ces éléments extérieurs étant maintenus pleins d’eau, en communication avec la mer, lorsque le sous- marin était en plongée. Ces tôles sont de faibles épaisseurs car étant soumis de chaque côté à la même pression, (car les ballasts ou les soutes sont en communication avec la mer) l’équilibre des forces devient nul. Il n’est donc pas nécessaire de faire des tôles de grandes épaisseurs. Une épaisseur de 5 à 10 mm suffit.
Equation de la statique des fluides : P + ρgh = cte
Soit B un point placé sur la surface de la mer (h(B)=0m) Soit A un point placé à une profondeur de 100m (h(A)=-100m)
P(A) + ρgh(A) = P(B) + ρgh(B) P(A)= 1 atm = 1 bar P(A) + ρgh(A) = P(B) ρ = 1024 kg.m^(-3) (eau salée) P(A) = P(B) - ρgh(A) g = 9.81 m/s² = 10^5 + 1024*9.81*100 P(A)= 10^6 Pa P(A)= 10 bars
17
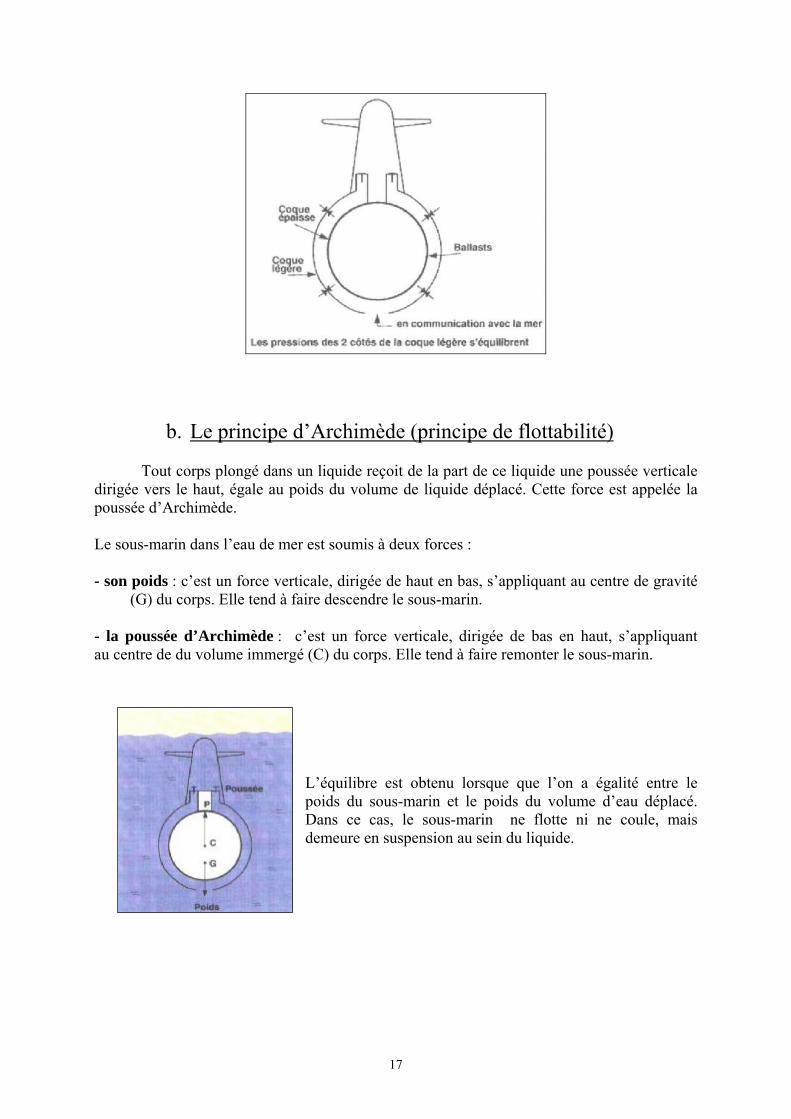
b. Le principe d’Archimède (principe de flottabilité)
Tout corps plongé dans un liquide reçoit de la part de ce liquide une poussée verticale dirigée vers le haut, égale au poids du volume de liquide déplacé. Cette force est appelée la poussée d’Archimède. Le sous-marin dans l’eau de mer est soumis à deux forces : - son poids : c’est un force verticale, dirigée de haut en bas, s’appliquant au centre de gravité
(G) du corps. Elle tend à faire descendre le sous-marin.
- la poussée d’Archimède : c’est un force verticale, dirigée de bas en haut, s’appliquant au centre de du volume immergé (C) du corps. Elle tend à faire remonter le sous-marin.
L’équilibre est obtenu lorsque que l’on a égalité entre le poids du sous-marin et le poids du volume d’eau déplacé. Dans ce cas, le sous-marin ne flotte ni ne coule, mais demeure en suspension au sein du liquide.
18
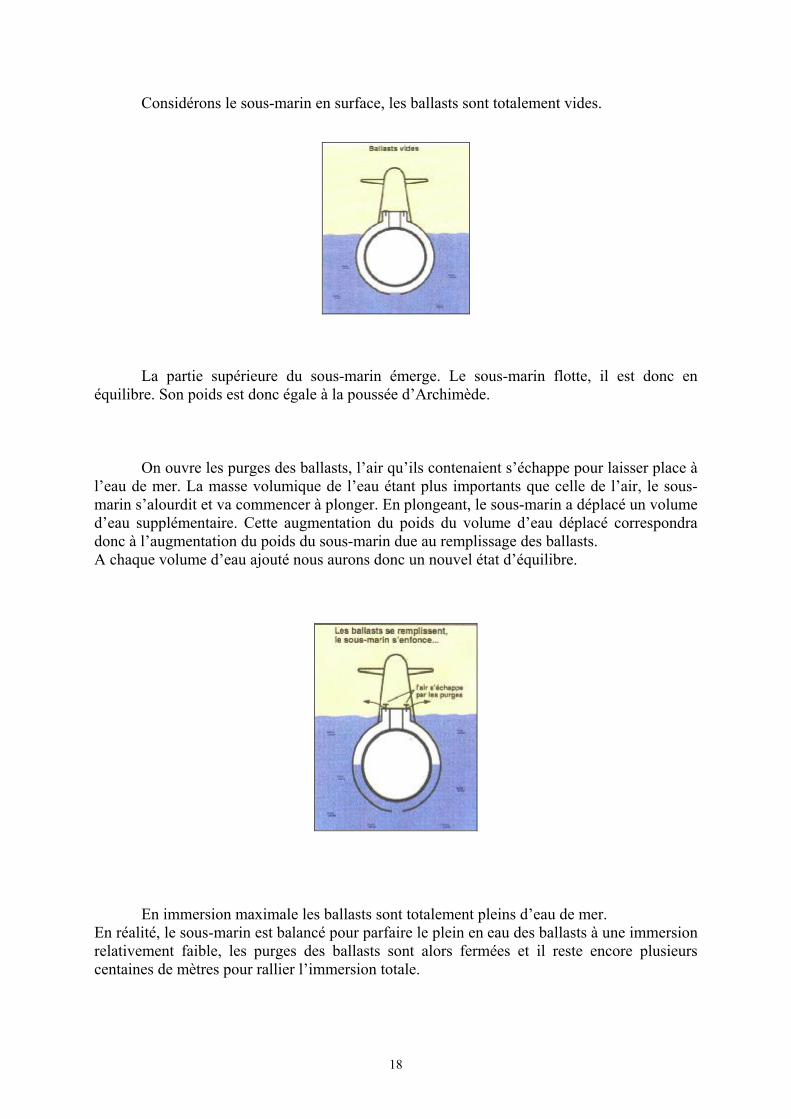
Considérons le sous-marin en surface, les ballasts sont totalement vides.
La partie supérieure du sous-marin émerge. Le sous-marin flotte, il est donc en équilibre. Son poids est donc égale à la poussée d’Archimède.
On ouvre les purges des ballasts, l’air qu’ils contenaient s’échappe pour laisser place à l’eau de mer. La masse volumique de l’eau étant plus importants que celle de l’air, le sous-marin s’alourdit et va commencer à plonger. En plongeant, le sous-marin a déplacé un volume d’eau supplémentaire. Cette augmentation du poids du volume d’eau déplacé correspondra donc à l’augmentation du poids du sous-marin due au remplissage des ballasts. A chaque volume d’eau ajouté nous aurons donc un nouvel état d’équilibre.
En immersion maximale les ballasts sont totalement pleins d’eau de mer. En réalité, le sous-marin est balancé pour parfaire le plein en eau des ballasts à une immersion relativement faible, les purges des ballasts sont alors fermées et il reste encore plusieurs centaines de mètres pour rallier l’immersion totale.
19
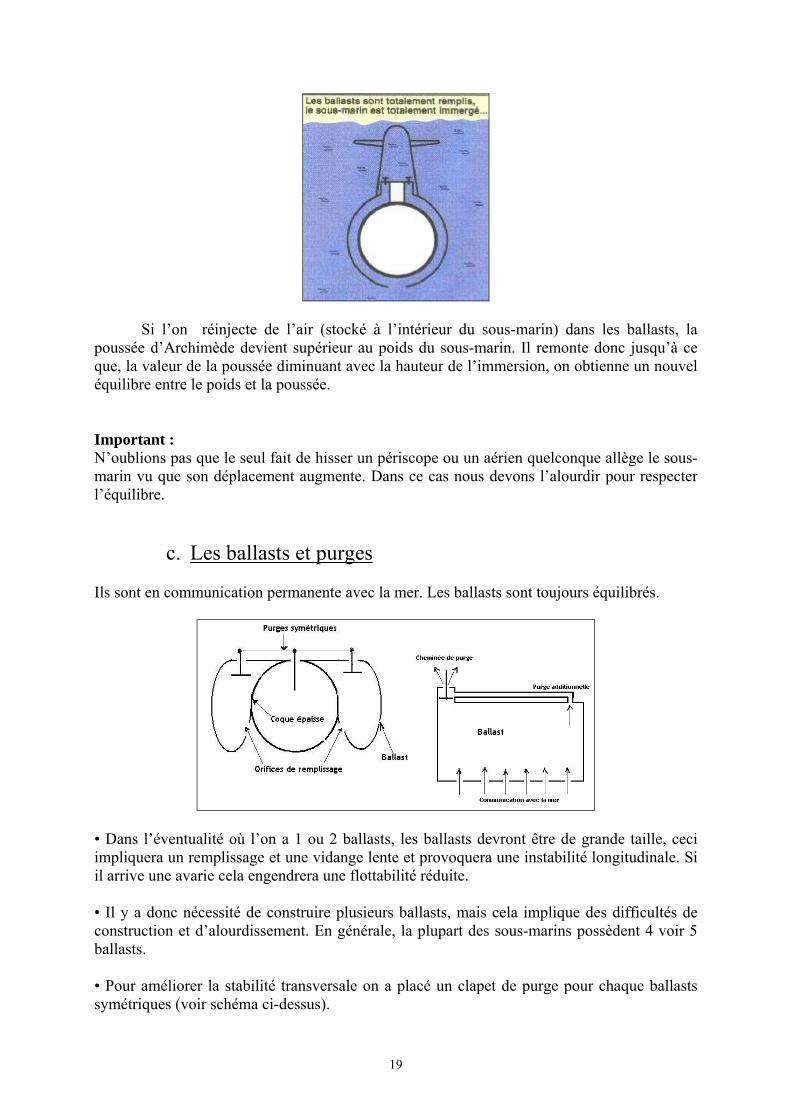
Si l’on réinjecte de l’air (stocké à l’intérieur du sous-marin) dans les ballasts, la poussée d’Archimède devient supérieur au poids du sous-marin. Il remonte donc jusqu’à ce que, la valeur de la poussée diminuant avec la hauteur de l’immersion, on obtienne un nouvel équilibre entre le poids et la poussée. Important : N’oublions pas que le seul fait de hisser un périscope ou un aérien quelconque allège le sous-marin vu que son déplacement augmente. Dans ce cas nous devons l’alourdir pour respecter l’équilibre.
c. Les ballasts et purges Ils sont en communication permanente avec la mer. Les ballasts sont toujours équilibrés.
• Dans l’éventualité où l’on a 1 ou 2 ballasts, les ballasts devront être de grande taille, ceci impliquera un remplissage et une vidange lente et provoquera une instabilité longitudinale. Si il arrive une avarie cela engendrera une flottabilité réduite. • Il y a donc nécessité de construire plusieurs ballasts, mais cela implique des difficultés de construction et d’alourdissement. En générale, la plupart des sous-marins possèdent 4 voir 5 ballasts. • Pour améliorer la stabilité transversale on a placé un clapet de purge pour chaque ballasts symétriques (voir schéma ci-dessus).
20
• Les ballasts sont numérotés de l’arrière vers l’avant, près du centre on les appelle centraux ou ballasts de manœuvres car il est possible de jouer sur la quantité d’eau. • La pression de l’air à l’intérieur du ballast est égale à la pression du tirant d’eau. (Tirant d’eau : hauteur de la partie immergé du sous-marin) • Les purges de deux ballasts symétriques sont manœuvrées par une seule commande. Pour réaliser cela les clapets de purges sont placés l’un à côté de l’autre au bout de la cheminée de purge de façon qu’elles soient manœuvrées en même temps par une commande à huile.
d. Principe de l’assiette et de la gîte
On dit que le sous-marin flotte toujours entre deux eaux. Si le poids du sous-marin devenait supérieur à la poussée qu’il reçoit, il coulerait au fond de la mer et ne pourrait plus remonter. Le volume des ballasts étant constant (défini à la construction), il nous faut donc régler le poids du sous-marin afin d’obtenir l’égalité Poids/Poussée. Cette opération est appelée « la pesée », elle est réalisée lors des premiers essais à la mer.
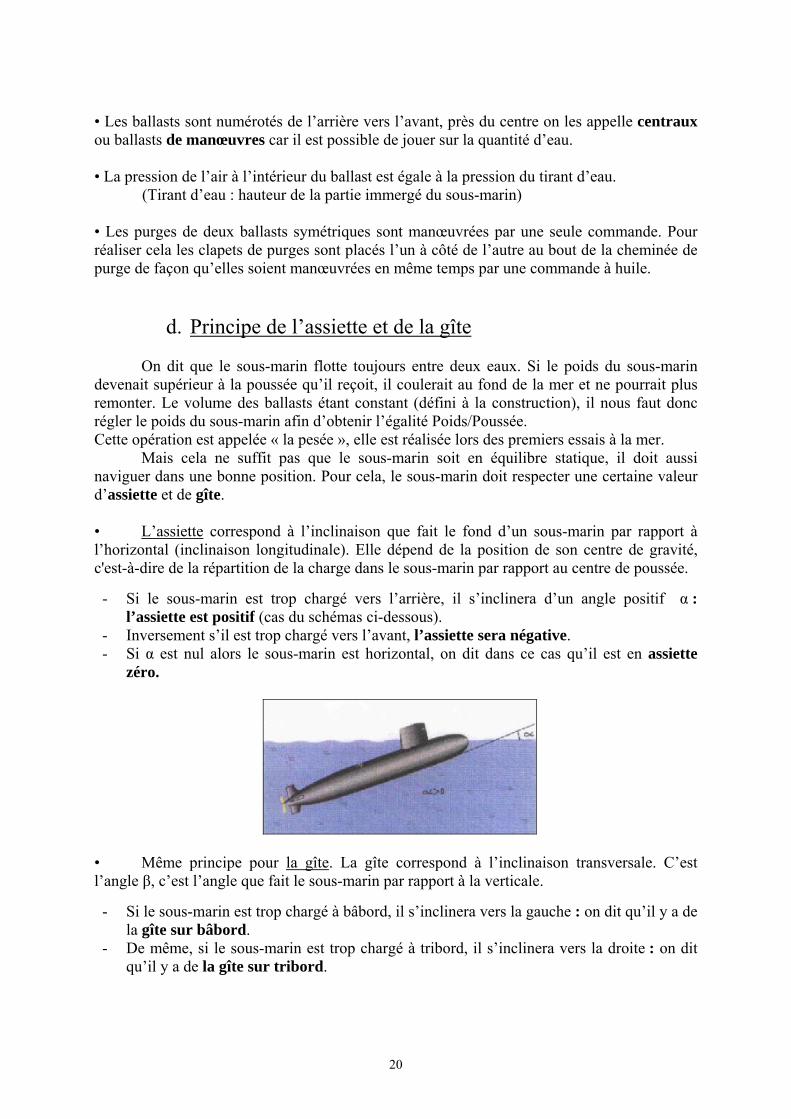
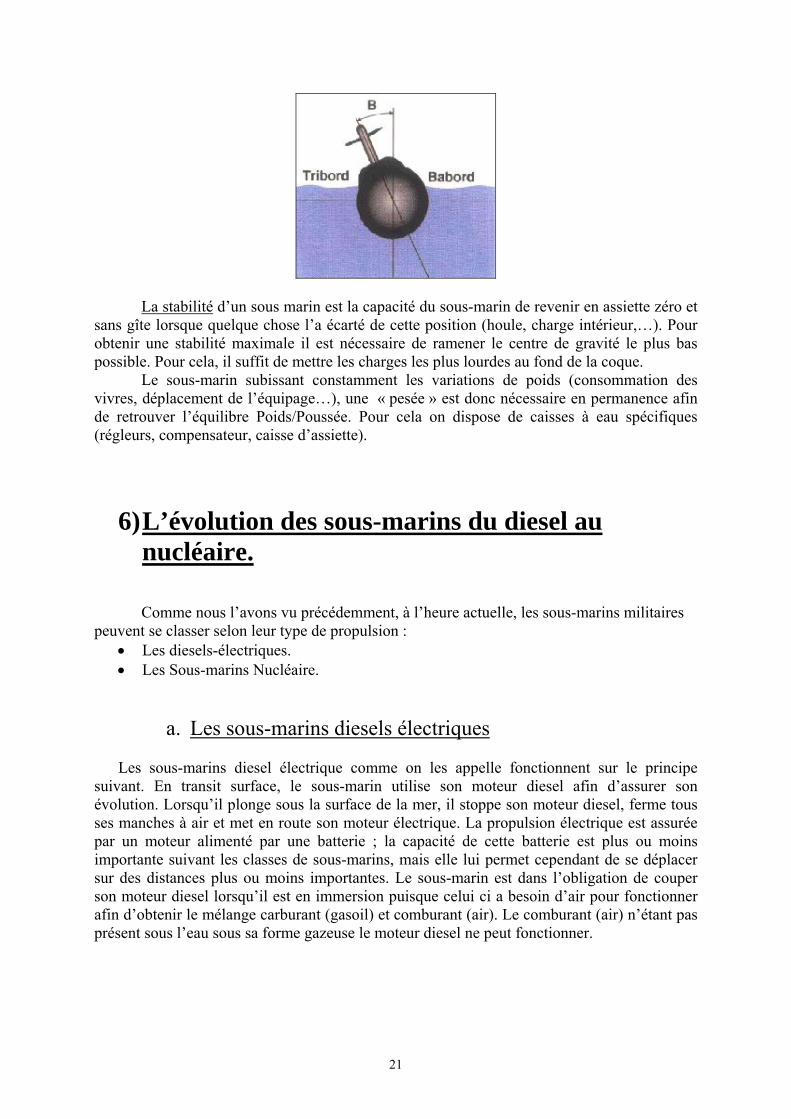
Mais cela ne suffit pas que le sous-marin soit en équilibre statique, il doit aussi naviguer dans une bonne position. Pour cela, le sous-marin doit respecter une certaine valeur d’assiette et de gîte. • L’assiette correspond à l’inclinaison que fait le fond d’un sous-marin par rapport à l’horizontal (inclinaison longitudinale). Elle dépend de la position de son centre de gravité, c'est-à-dire de la répartition de la charge dans le sous-marin par rapport au centre de poussée. - Si le sous-marin est trop chargé vers l’arrière, il s’inclinera d’un angle positif α :
l’assiette est positif (cas du schémas ci-dessous). - Inversement s’il est trop chargé vers l’avant, l’assiette sera négative. - Si α est nul alors le sous-marin est horizontal, on dit dans ce cas qu’il est en assiette
zéro.
• Même principe pour la gîte. La gîte correspond à l’inclinaison transversale. C’est l’angle β, c’est l’angle que fait le sous-marin par rapport à la verticale. - Si le sous-marin est trop chargé à bâbord, il s’inclinera vers la gauche : on dit qu’il y a de
la gîte sur bâbord. - De même, si le sous-marin est trop chargé à tribord, il s’inclinera vers la droite : on dit
qu’il y a de la gîte sur tribord.
21
La stabilité d’un sous marin est la capacité du sous-marin de revenir en assiette zéro et
sans gîte lorsque quelque chose l’a écarté de cette position (houle, charge intérieur,…). Pour obtenir une stabilité maximale il est nécessaire de ramener le centre de gravité le plus bas possible. Pour cela, il suffit de mettre les charges les plus lourdes au fond de la coque. Le sous-marin subissant constamment les variations de poids (consommation des vivres, déplacement de l’équipage…), une « pesée » est donc nécessaire en permanence afin de retrouver l’équilibre Poids/Poussée. Pour cela on dispose de caisses à eau spécifiques (régleurs, compensateur, caisse d’assiette).
6) L’évolution des sous-marins du diesel au nucléaire. Comme nous l’avons vu précédemment, à l’heure actuelle, les sous-marins militaires
peuvent se classer selon leur type de propulsion : • Les diesels-électriques. • Les Sous-marins Nucléaire.
a. Les sous-marins diesels électriques
Les sous-marins diesel électrique comme on les appelle fonctionnent sur le principe suivant. En transit surface, le sous-marin utilise son moteur diesel afin d’assurer son évolution. Lorsqu’il plonge sous la surface de la mer, il stoppe son moteur diesel, ferme tous ses manches à air et met en route son moteur électrique. La propulsion électrique est assurée par un moteur alimenté par une batterie ; la capacité de cette batterie est plus ou moins importante suivant les classes de sous-marins, mais elle lui permet cependant de se déplacer sur des distances plus ou moins importantes. Le sous-marin est dans l’obligation de couper son moteur diesel lorsqu’il est en immersion puisque celui ci a besoin d’air pour fonctionner afin d’obtenir le mélange carburant (gasoil) et comburant (air). Le comburant (air) n’étant pas présent sous l’eau sous sa forme gazeuse le moteur diesel ne peut fonctionner.
22
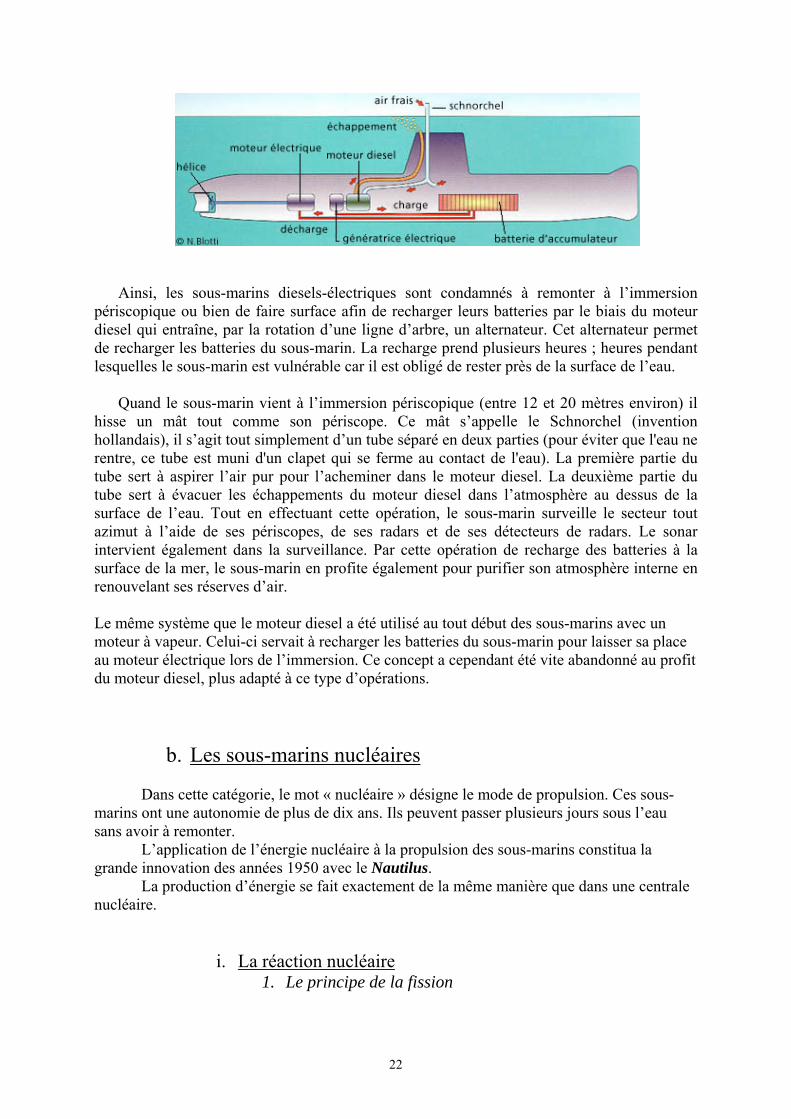
Ainsi, les sous-marins diesels-électriques sont condamnés à remonter à l’immersion
périscopique ou bien de faire surface afin de recharger leurs batteries par le biais du moteur diesel qui entraîne, par la rotation d’une ligne d’arbre, un alternateur. Cet alternateur permet de recharger les batteries du sous-marin. La recharge prend plusieurs heures ; heures pendant lesquelles le sous-marin est vulnérable car il est obligé de rester près de la surface de l’eau.
Quand le sous-marin vient à l’immersion périscopique (entre 12 et 20 mètres environ) il
hisse un mât tout comme son périscope. Ce mât s’appelle le Schnorchel (invention hollandais), il s’agit tout simplement d’un tube séparé en deux parties (pour éviter que l'eau ne rentre, ce tube est muni d'un clapet qui se ferme au contact de l'eau). La première partie du tube sert à aspirer l’air pur pour l’acheminer dans le moteur diesel. La deuxième partie du tube sert à évacuer les échappements du moteur diesel dans l’atmosphère au dessus de la surface de l’eau. Tout en effectuant cette opération, le sous-marin surveille le secteur tout azimut à l’aide de ses périscopes, de ses radars et de ses détecteurs de radars. Le sonar intervient également dans la surveillance. Par cette opération de recharge des batteries à la surface de la mer, le sous-marin en profite également pour purifier son atmosphère interne en renouvelant ses réserves d’air. Le même système que le moteur diesel a été utilisé au tout début des sous-marins avec un moteur à vapeur. Celui-ci servait à recharger les batteries du sous-marin pour laisser sa place au moteur électrique lors de l’immersion. Ce concept a cependant été vite abandonné au profit du moteur diesel, plus adapté à ce type d’opérations.
b. Les sous-marins nucléaires
Dans cette catégorie, le mot « nucléaire » désigne le mode de propulsion. Ces sous-marins ont une autonomie de plus de dix ans. Ils peuvent passer plusieurs jours sous l’eau sans avoir à remonter.
L’application de l’énergie nucléaire à la propulsion des sous-marins constitua la grande innovation des années 1950 avec le Nautilus.
La production d’énergie se fait exactement de la même manière que dans une centrale nucléaire.
i. La réaction nucléaire 1. Le principe de la fission
23
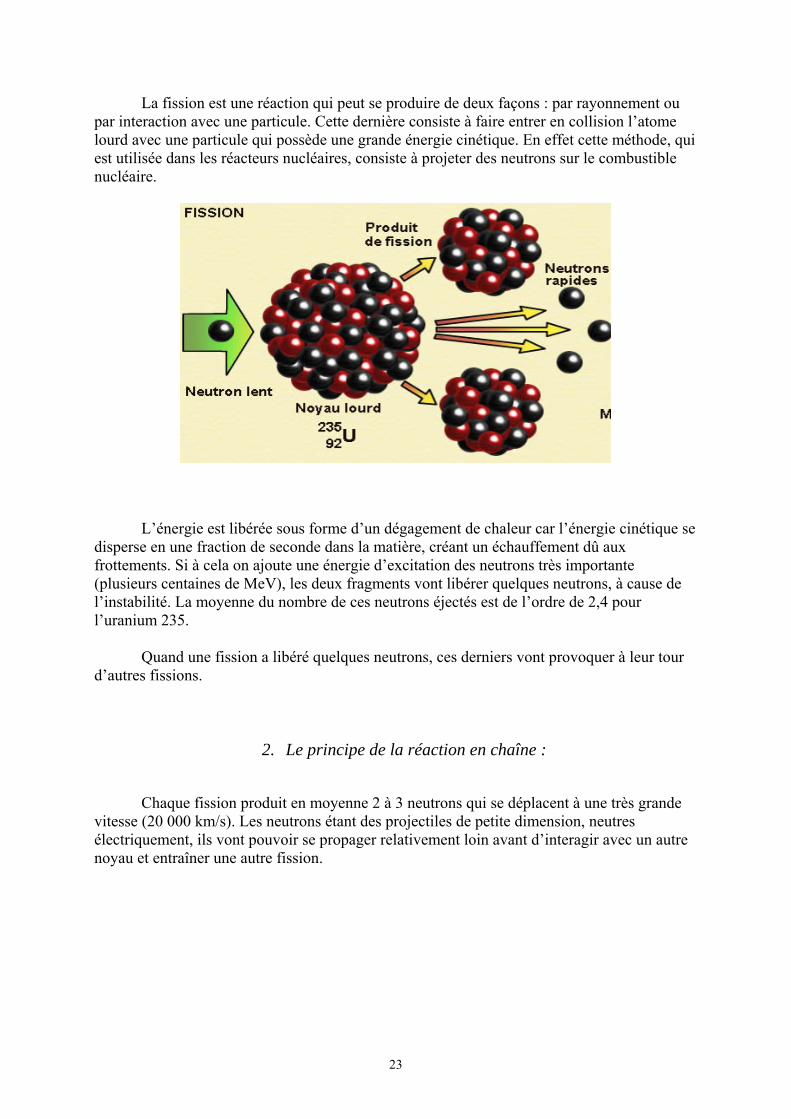
La fission est une réaction qui peut se produire de deux façons : par rayonnement ou par interaction avec une particule. Cette dernière consiste à faire entrer en collision l’atome lourd avec une particule qui possède une grande énergie cinétique. En effet cette méthode, qui est utilisée dans les réacteurs nucléaires, consiste à projeter des neutrons sur le combustible nucléaire.
L’énergie est libérée sous forme d’un dégagement de chaleur car l’énergie cinétique se disperse en une fraction de seconde dans la matière, créant un échauffement dû aux frottements. Si à cela on ajoute une énergie d’excitation des neutrons très importante (plusieurs centaines de MeV), les deux fragments vont libérer quelques neutrons, à cause de l’instabilité. La moyenne du nombre de ces neutrons éjectés est de l’ordre de 2,4 pour l’uranium 235.
Quand une fission a libéré quelques neutrons, ces derniers vont provoquer à leur tour d’autres fissions.
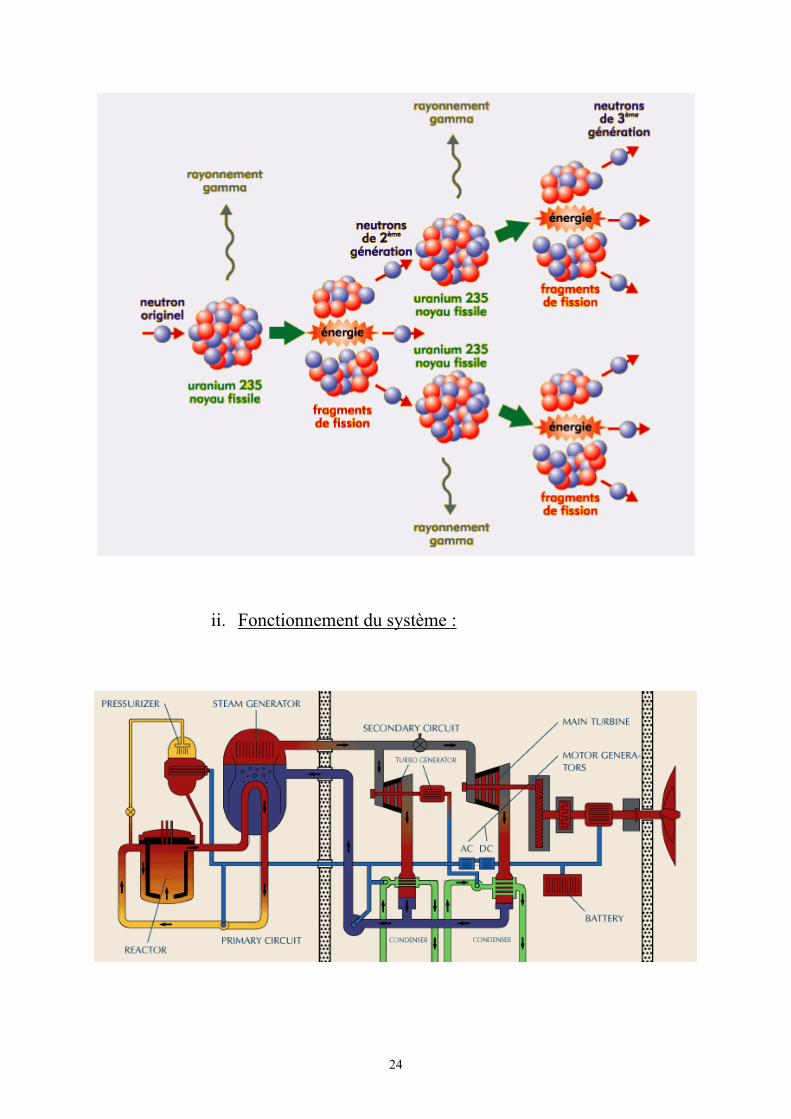
2. Le principe de la réaction en chaîne :
Chaque fission produit en moyenne 2 à 3 neutrons qui se déplacent à une très grande vitesse (20 000 km/s). Les neutrons étant des projectiles de petite dimension, neutres électriquement, ils vont pouvoir se propager relativement loin avant d’interagir avec un autre noyau et entraîner une autre fission.
24
ii. Fonctionnement du système :
25
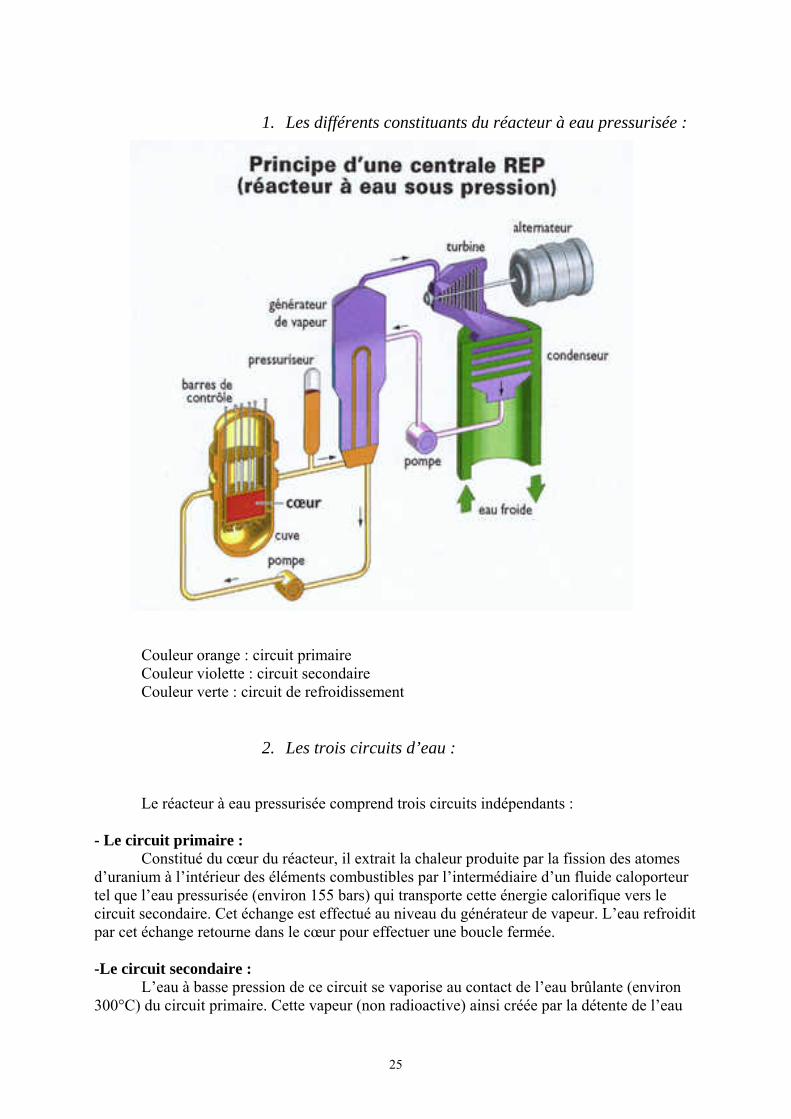
1. Les différents constituants du réacteur à eau pressurisée :
Couleur orange : circuit primaire
Couleur violette : circuit secondaire Couleur verte : circuit de refroidissement
2. Les trois circuits d’eau :
Le réacteur à eau pressurisée comprend trois circuits indépendants :
- Le circuit primaire : Constitué du cœur du réacteur, il extrait la chaleur produite par la fission des atomes
d’uranium à l’intérieur des éléments combustibles par l’intermédiaire d’un fluide caloporteur tel que l’eau pressurisée (environ 155 bars) qui transporte cette énergie calorifique vers le circuit secondaire. Cet échange est effectué au niveau du générateur de vapeur. L’eau refroidit par cet échange retourne dans le cœur pour effectuer une boucle fermée.
-Le circuit secondaire :
L’eau à basse pression de ce circuit se vaporise au contact de l’eau brûlante (environ 300°C) du circuit primaire. Cette vapeur (non radioactive) ainsi créée par la détente de l’eau
26
va faire tourner les turbines à haute et basse pression; celles-ci vont entraîner un alternateur qui va produire l’électricité. La vapeur va ensuite être condensée pour retourner à l’état liquide puis être réinjectée dans le générateur de vapeur : la boucle est bouclée.
- Le circuit de refroidissement :
Le circuit de refroidissement intermédiaire assure le refroidissement des équipements des circuits nucléaires à l’aide d’eau déminéralisée chromatée, qui circule en boucle fermée. Ce système comprend quatre trains alignés en deux boucles fermées. Cette eau est refroidie à son tour par le refroidissement normal d’eau brute en un circuit ouvert, comprenant deux trains par unité équipé chacun d’une pompe aspirant dans la mer, un collecteur commun pour les deux unités qui sert au refroidissement des échangeurs du circuit de refroidissement intermédiaire, et un canal de rejet à la mer.
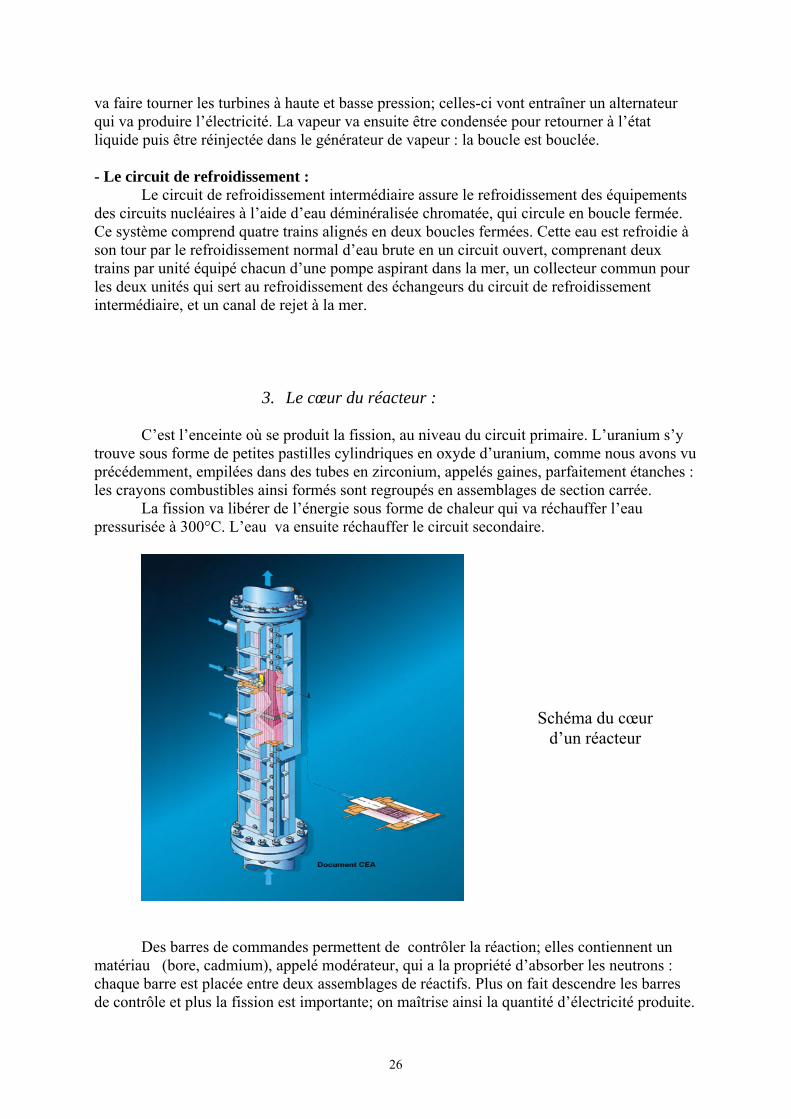
3. Le cœur du réacteur :
C’est l’enceinte où se produit la fission, au niveau du circuit primaire. L’uranium s’y trouve sous forme de petites pastilles cylindriques en oxyde d’uranium, comme nous avons vu précédemment, empilées dans des tubes en zirconium, appelés gaines, parfaitement étanches : les crayons combustibles ainsi formés sont regroupés en assemblages de section carrée.
La fission va libérer de l’énergie sous forme de chaleur qui va réchauffer l’eau pressurisée à 300°C. L’eau va ensuite réchauffer le circuit secondaire.
Des barres de commandes permettent de contrôler la réaction; elles contiennent un
matériau (bore, cadmium), appelé modérateur, qui a la propriété d’absorber les neutrons : chaque barre est placée entre deux assemblages de réactifs. Plus on fait descendre les barres de contrôle et plus la fission est importante; on maîtrise ainsi la quantité d’électricité produite.
Schéma du cœur d’un réacteur
27
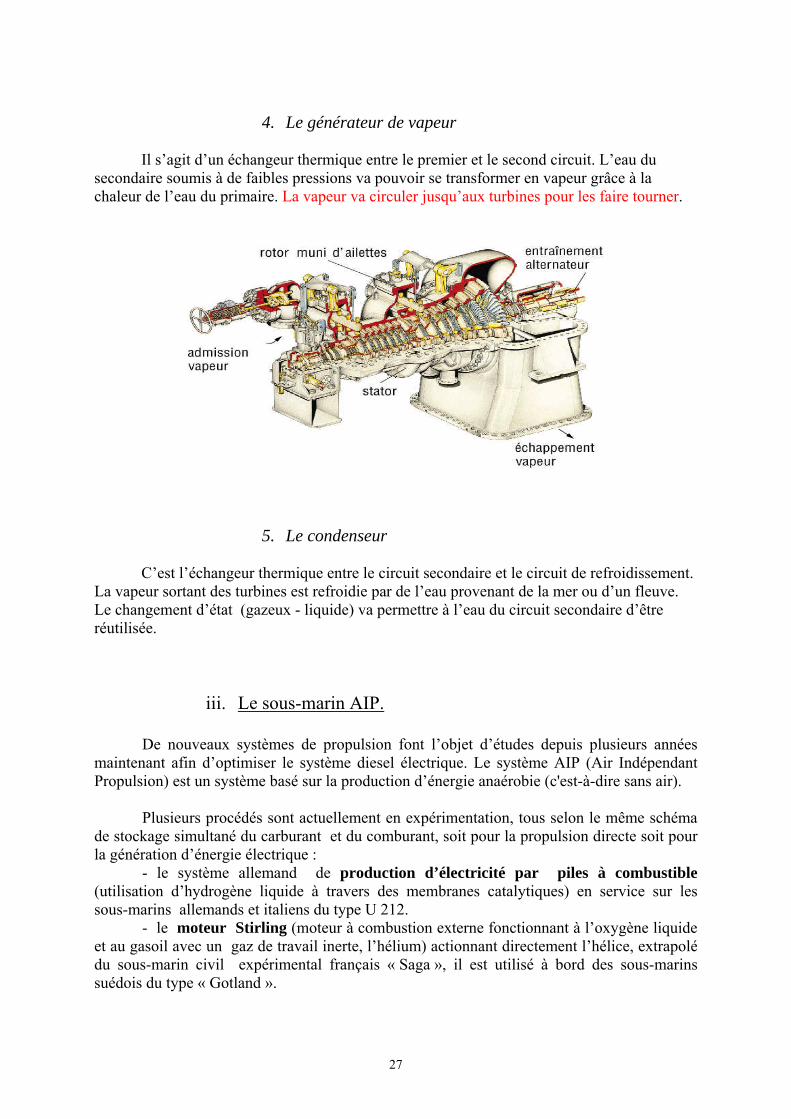
4. Le générateur de vapeur
Il s’agit d’un échangeur thermique entre le premier et le second circuit. L’eau du
secondaire soumis à de faibles pressions va pouvoir se transformer en vapeur grâce à la chaleur de l’eau du primaire. La vapeur va circuler jusqu’aux turbines pour les faire tourner.
5. Le condenseur
C’est l’échangeur thermique entre le circuit secondaire et le circuit de refroidissement. La vapeur sortant des turbines est refroidie par de l’eau provenant de la mer ou d’un fleuve. Le changement d’état (gazeux - liquide) va permettre à l’eau du circuit secondaire d’être réutilisée.
iii. Le sous-marin AIP. De nouveaux systèmes de propulsion font l’objet d’études depuis plusieurs années
maintenant afin d’optimiser le système diesel électrique. Le système AIP (Air Indépendant Propulsion) est un système basé sur la production d’énergie anaérobie (c'est-à-dire sans air).
Plusieurs procédés sont actuellement en expérimentation, tous selon le même schéma
de stockage simultané du carburant et du comburant, soit pour la propulsion directe soit pour la génération d’énergie électrique :
- le système allemand de production d’électricité par piles à combustible (utilisation d’hydrogène liquide à travers des membranes catalytiques) en service sur les sous-marins allemands et italiens du type U 212.
- le moteur Stirling (moteur à combustion externe fonctionnant à l’oxygène liquide et au gasoil avec un gaz de travail inerte, l’hélium) actionnant directement l’hélice, extrapolé du sous-marin civil expérimental français « Saga », il est utilisé à bord des sous-marins suédois du type « Gotland ».
28
- le système français Mesma (production de vapeur par combustion d’un mélange de fuel-oil ou éthanol et d’oxygène liquide) actionnant un turboalternateur producteur d’électricité alimentant la batterie et mis au point sur certains sous-marins de la classe « Agosta » proposés au Pakistan.
Tous ces modes de production d’énergie de propulsion se trouvent en concurrence
pour la construction de sous-marin diesel « évolués » destinés à des pays qui n’ont pas les moyens de maîtriser l’énergie nucléaire.
En tout état de cause, ils ne pourront jamais, et de très loin, concurrencer l’atome pour la propulsion sous-marine. Ils permettront, s'ils sont mis au point convenablement, de « booster » un peu les performances des SSK en leur permettant d’améliorer leur autonomie en plongée à faible vitesse. On pourrait ainsi compter sur 8 à 10 jours d’autonomie plongée à vitesse lente.
29
CONCLUSION
Depuis toujours, l’homme essaye de repousser les limites de la physique en construisant des outils de plus en plus perfectionner pour lui permettre d’explorer des mondes nouveaux tels que les grandes profondeurs ou l’espace. Ainsi, nous pouvons observer une grande évolution du matériel dans chaque domaine, comme dans notre cas le sous-marin. En effet, au départ, ils ne pouvaient descendre qu’à quelques mètres de profondeur pendant une poignée de secondes tandis que maintenant, les sous-marins peuvent rester presque tout le temps qu’ils souhaitent sous l’eau à plusieurs centaines de mètres de profondeur.
Nous pouvons également dire que cette évolution n’est pas encore terminée car de
nouveaux systèmes de propulsion sont à l’étude pour réduire les coûts de production et d’installation de telles machines et ouvrir le marché à de nouveaux pays. Finissons par une petite devinette : Comment fait-on pour couler un sous-marin belge ?
Réponse : il faut revêtir un scaphandre et aller frapper à la porte
30
BIBLIOGRAPHIE.
Encyclopédie Microsoft encarta Encyclopédie Universalis Internet : http://zone.sousmarins.free.fr/Sous-marins%20anaerobies.htm http://hydro.marseille.free.fr/cours/propulsion_elec.pdf http://www.ifrance.com/sousmarinJUNON/ http://perso.wanadoo.fr/cobaye.daisy/sousmarins/accueil.htm http://www.maritime.org/fleetsub/diesel/chap1.htm http://americanhistory.si.edu/subs/operating/aboard/index.html http://r.faugere.chez.tiscali.fr/sousmarins.htm http://www.geocities.com/gwmccue/index.html http://perso.wanadoo.fr/bertrand.daubigny/SSSurcouf.htm http://fr.wikipedia.org/wiki/Sous-marin