Embed Size (px)
Citation preview

Une Structure Adaptative Basée Sur la LogiqueFloue Pour la Commande de la Vitesse d’un Moteur
Asynchrone
Résumé – Cet article présente unecommande adaptative de la vitesse d’unmoteur asynchrone basée sur la logiquefloue, donc nous sommes concernés àl’utilisation d’un nouveau régulateur PIadaptatif – flou afin d’améliorer lesperformances du régulateur PI classique.Les entrées sont choisies de telle sorte àreprésenter le plus fidèlement possible ladynamique du système. A cet effet, onchoisit l'erreur de réglage e et sa variationΔe comme entrée. La sortie α du régulateurà logique flou est utilisée pour faire varierles paramètres du régulateur PI à savoir,Kp, Ki en utilisant certaines techniques dela théorie de la logique floue pour lacommande de la vitesse.Plusieurs essais de simulation sousSimulink/Matlab sont effectués en vue demettre en évidence les performances dusystème de commande.
Mots clé : PI adaptatif – flou, commandepar orientation de flux, moteur asynchrone,logique floue.
I. INTRODUCTIONLe moteur asynchrone est le moteur le plusutilisé dans les applications de la vitessevariable. Sa simplicité de conception, safiabilité, l’absence de collecteur sont lesprincipales raisons de son succès. Mais sonmodèle mathématique est complexe,multivariable, non-linéaire, avec un fortcouplage entre les variables d’entrée, desortie et internes, ce qui a longtempsretardé l’apparition de commandes
performantes et appropriés à ce type demotorisation [1], [2].Bien que beaucoup d'algorithmes decommande aient été développés pendantplusieurs décennies, les contrôleurs PIsont toujours la majorité des régulateursutilisés dans les systèmes de commandeindustrielles particulièrement quand lesperformances élevées du régulateur ne sontpas exigées. La conception et l’analysed’un tel contrôleur exigent de connaître lesdeux paramètres à savoir : le gainproportionnel (Kp) et l’intégrateur (Ki).Pour comprendre comment lecomportement du système affecté par lesdeux paramètres des contrôleurs PI,beaucoup de temps doit être consommépour trouver la règle optimale pour varierces paramètres.La plupart de ces règles sont acceptées parles systèmes de commande industriels engénéral, mais elles réalisent rarement unebonne performance parce que le système àcontrôler est difficile d’être modéliséexactement, [2], [3], [4], [5].Les contrôleurs basés sur les concepts del’intelligence artificielle, logique floue,réseaux de neurones, sont des alternativesintéressantes, et permettent d’améliorer larobustesse du processus à contrôler, [6].Dans ce travail, on a amélioré lesinconvénients des algorithmes classiquesdu contrôleur PI en adoptant desalgorithmes de commande floue enincluant l’expertise acquise par lesopérateurs, [7].Cette méthode permet d’obtenir une loi decommande souvent efficace, sans devoir
DJ. CHERIFI, Y. MILOUD
ICEO'11
67

faire appel à des développementsthéoriques importants. Elle présentel’intérêt de prendre en compte lesexpériences acquises par les utilisateurs etopérateurs du processus à commander.La méthode suivante est utilisée pourdéterminer les paramètres du régulateur PIadaptatif-flou, [8]. Premièrement, choisirles valeurs des gains du contrôleur PI Kp ,Ki initialement égales à 1. Ensuite, fairevarier G afin de minimiser l’erreurstatique. La dernière étape consiste àsélectionner les gains Ge et GΔe jusqu’àl’obtention de la meilleure réponse dusystème. Il est à noter que les gains ducontrôleur PI peuvent avoir des valeursdifférentes de 1.A ce moment là, on doitsélectionner des nouvelles valeurs durégulateur flou pour obtenir une bonneréponse du système.
II. MODELISATION DE LA MAS
Un modèle biphasé standard de lamachine asynchrone à un référentiel lié auchamp tournant est exprimé dans l'espaced'état comme suit.
BUAXtd
Xd
Avec :
qr
dr
qs
ds
i
i
i
i
X
r
r
s
L
M0
0L
M
10
01
L
1B
et
qs
ds
v
vU
Oùsr LL
M 2
1
L'équation mécanique du système est
donnée par :
fdt
dJCC re
Avec :
)()2/3( qrdsqsdre iiiipMC
La commande vectorielle est de typeindirecte avec orientation du fluxrotorique. Son principe consiste à exploiterle modèle dynamique du moteur enchoisissant un système d’axe diphasé (d,q)et a l’orienter suivant le flux rotorique, enannulant sa composante quadratique qr , etne conserver que sa composante directe
dr . Le flux est alors entièrement porté surl’axe direct [4], [5] :
0qr D’où rdr
Le flux est ainsi commandéindépendamment par le courant iSd et lecouple par l’intermédiaire du courant iSq.Son amplitude est obtenue par une fonctionnon linéaire de défluxage délivrant sagrandeur de référence et exprimée par larelation :
*
dr
r
ms
sr
m
r
ms
r
m
rsr
rs
m
ss
ms
m
srs
ms
s
TTL
M
L
MTL
M
TL
MTL
M
L
M
T
L
M
TL
M
T
A
11
11
11
11
r Si Ω≤ ΩN
NRN Si Ω> ΩN
ICEO'11
68
Sa position est déterminée à tout instantpar intégration de la pulsation statorique,qui elle même est reconstituée à l’aide dela vitesse du moteur et de la pulsationrotorique :
dtT
iLpdtw
RqR
sqm
ss )...
.(.
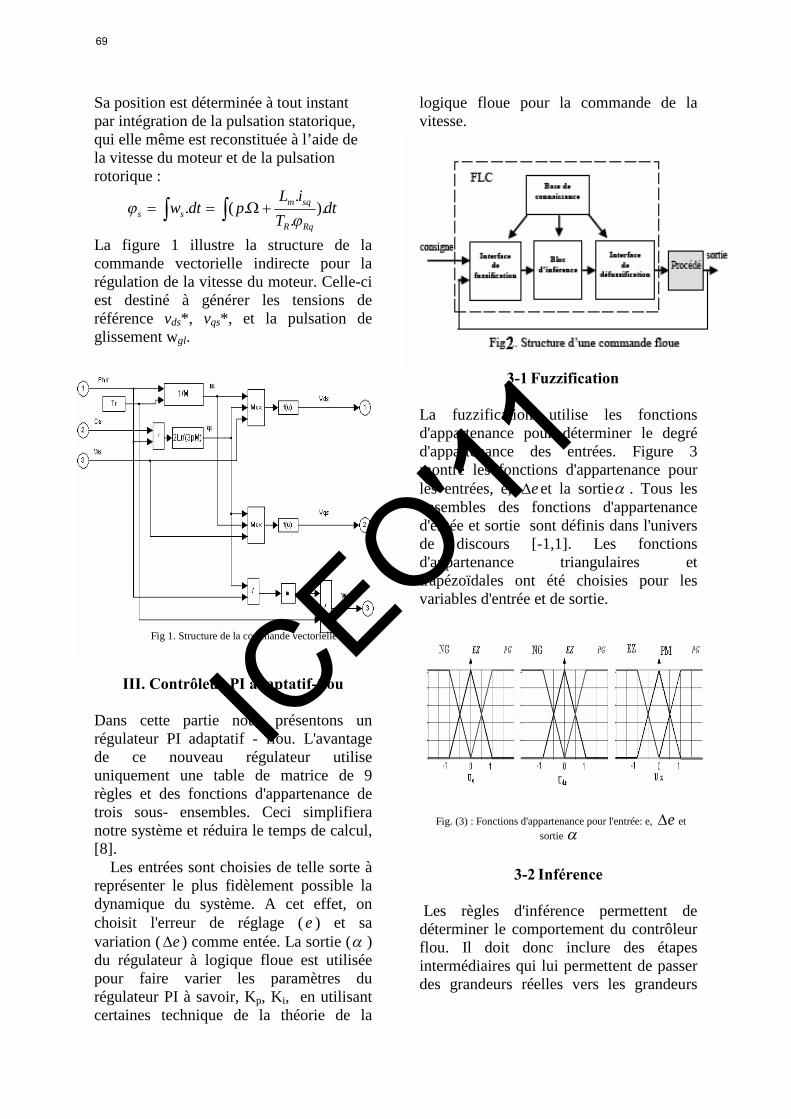
La figure 1 illustre la structure de lacommande vectorielle indirecte pour larégulation de la vitesse du moteur. Celle-ciest destiné à générer les tensions deréférence vds*, vqs*, et la pulsation deglissement wgl.
III. Contrôleur PI adaptatif-flou
Dans cette partie nous présentons unrégulateur PI adaptatif - flou. L'avantagede ce nouveau régulateur utiliseuniquement une table de matrice de 9règles et des fonctions d'appartenance detrois sous- ensembles. Ceci simplifieranotre système et réduira le temps de calcul,[8].
Les entrées sont choisies de telle sorte àreprésenter le plus fidèlement possible ladynamique du système. A cet effet, onchoisit l'erreur de réglage ( e ) et savariation ( e ) comme entée. La sortie ( )du régulateur à logique floue est utiliséepour faire varier les paramètres durégulateur PI à savoir, Kp, Ki, en utilisantcertaines technique de la théorie de la
logique floue pour la commande de lavitesse.
3-1 Fuzzification
La fuzzification utilise les fonctionsd'appartenance pour déterminer le degréd'appartenance des entrées. Figure 3montre les fonctions d'appartenance pourles entrées, e, e et la sortie . Tous lesensembles des fonctions d'appartenanced'entée et sortie sont définis dans l'universde discours [-1,1]. Les fonctionsd'appartenance triangulaires ettrapézoïdales ont été choisies pour lesvariables d'entrée et de sortie.
3-2 Inférence
Les règles d'inférence permettent dedéterminer le comportement du contrôleurflou. Il doit donc inclure des étapesintermédiaires qui lui permettent de passerdes grandeurs réelles vers les grandeurs
Fig 1. Structure de la commande vectorielle
Fig. (3) : Fonctions d'appartenance pour l'entrée: e, e etsortie
ICEO'11
69
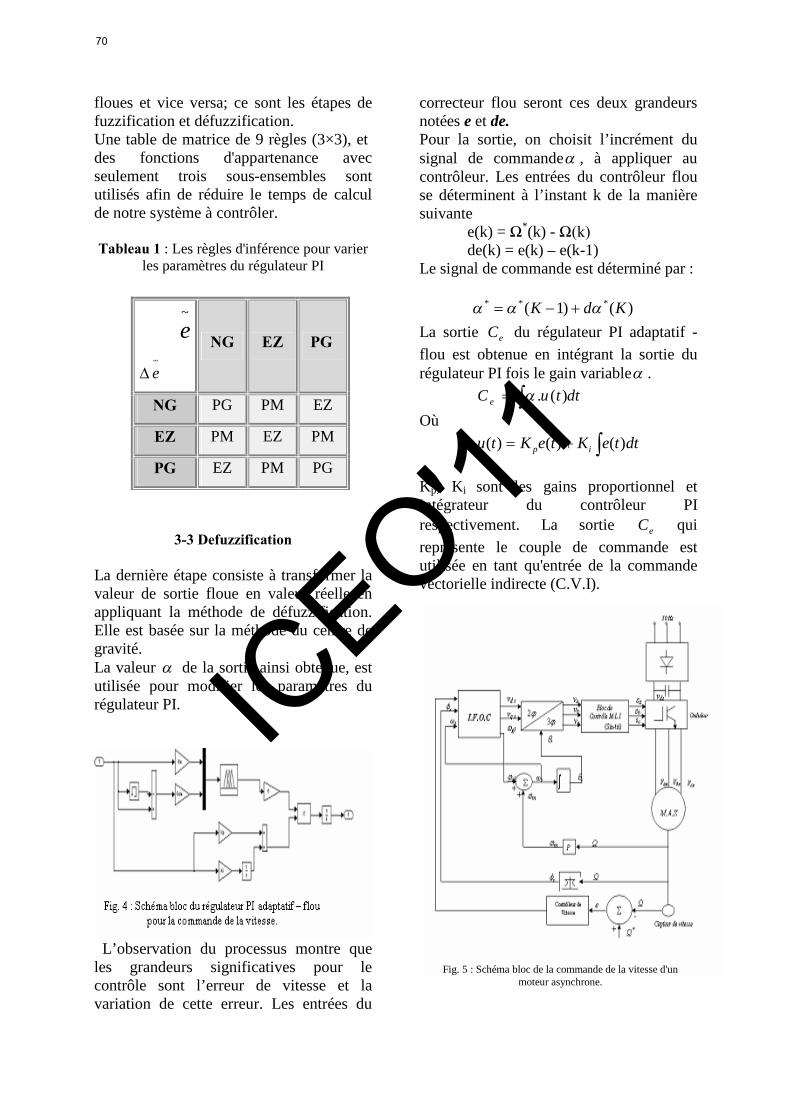
floues et vice versa; ce sont les étapes defuzzification et défuzzification.Une table de matrice de 9 règles (3×3), etdes fonctions d'appartenance avecseulement trois sous-ensembles sontutilisés afin de réduire le temps de calculde notre système à contrôler.
Tableau 1 : Les règles d'inférence pour varierles paramètres du régulateur PI
3-3 Defuzzification
La dernière étape consiste à transformer lavaleur de sortie floue en valeur réelle enappliquant la méthode de défuzzification.Elle est basée sur la méthode du centre degravité.La valeur de la sortie ainsi obtenue, estutilisée pour modifier les paramètres durégulateur PI.
L’observation du processus montre queles grandeurs significatives pour lecontrôle sont l’erreur de vitesse et lavariation de cette erreur. Les entrées du
correcteur flou seront ces deux grandeursnotées e et de.Pour la sortie, on choisit l’incrément dusignal de commande , à appliquer aucontrôleur. Les entrées du contrôleur flouse déterminent à l’instant k de la manièresuivante
e(k) = Ω*(k) - Ω(k)de(k) = e(k) – e(k-1)
Le signal de commande est déterminé par :
)()1( *** KdK
La sortie eC du régulateur PI adaptatif -flou est obtenue en intégrant la sortie durégulateur PI fois le gain variable .
dttuC e )(.
Où
dtteKteKtu ip )()()(
Kp, Ki sont les gains proportionnel etintégrateur du contrôleur PIrespectivement. La sortie eC quireprésente le couple de commande estutilisée en tant qu'entrée de la commandevectorielle indirecte (C.V.I).
~e
~e
NG EZ PG
NG PG PM EZ
EZ PM EZ PM
PG EZ PM PG
Fig. 5 : Schéma bloc de la commande de la vitesse d'unmoteur asynchrone.
ICEO'11
70

IV. RESULTAT ET INTERPRETATION
Le schéma de commande décrit par lafigure 5, a été testé par simulation et afind’évaluer les performances de la structureproposée, nous l’avons implémentée sousl’environnement logicielMATLAB/SIMULINK, pour un moteurasynchrone dont les principaux paramètresont donné dans le tableau 2.Enfin, divers tests de simulation, ont étéréalisés, leurs objectifs étant, nonseulement d’analyser les comportementsdu système pour différentes conditions defonctionnement, mais également de vérifierla robustesse de la stratégie de commandeenvisagée vis-à-vis des variations dumoment d’inertie et de la résistancerotorique.La figure 6 montre les résultats desimulation des performances dynamiquesainsi que la robustesse du régulateur PIadaptatif - flou.
Le moteur est démarré avec une charge de10 N.m et subis à st 5.2 et à st 5.4respectivement une perturbation de charge(±2 N.m). Le rejet de la perturbations’effectue rapidement avec seulement unechute de vitesse de 0.4 (tr/min) et onconstate également que la vitesse dumoteur se stabilise à sa valeur de référence.Concernant la variation des paramètres dumoteur, on a mené à augmenter larésistance rotorique à deux fois la valeurnominale. On remarque d'après lesrésultats que le régulateur PI adaptatif –flou rejette la perturbation de la résistancerotorique après un temps de 0.16s avec unechute maximale de vitesse de 1.5 (tr/min).Tan disque la poursuite de la vitesses'effectue parfaitement. En doublant lemoment d'inertie et en démarrant le moteuren pleine charge, le régulateur PI adaptatif-flou réagit d'une maniére satisfaisante sansaucun dépassement.
V. CONCLUSIONDans cet article, on a proposé un nouveaurégulateur PI adaptatif-flou pour lacommande de la vitesse du moteur
asynchrone pour faire face auxinconvénients du régulateur classique PI etévaluer les performances telles que, letemps de réponse, le dépassement, le rejetde la perturbation, etc…Les résultats obtenus ont montré desperformances très satisfaisantes etsignificatives d’une bonne adaptationtraduite par des comportements excellents,aussi bien en poursuite, qu’en régulation,avec une dynamique de la vitessecaractérisée par un excellent suivi destrajectoires de référence et par une trèsfaible sensibilité aux perturbations de lacharge.D'après les résultats de simulation, lerégulateur PI adaptatif-flou a montré sesbonnes performances à la variation desparamètres du système à contrôler.
Tableau 2 : Parameters de la machineasynchrone
50 Hz, 1.5 Kw , 1420 tr/mn, 380 V, 3.7ARésistance rotorique 805.3rR
Résistance statorique 85.4sR
Inductance rotorique 274sL mHInductance statorique 274sL mHMoment d’inertie 031.0J kg.m2
Coefficient defrottement
F=0.00114kg.m2/s
BIBLIOGRAPHIE
[1] L.BAGHLI, Contribution à la commandede la machine asynchrone, utilisation de lalogique floue, des réseaux de neurones et desalgorithmes génétiques, thèse de doctorat,Université Henry Poincaré, Nancy-I, Janv.1999.[2] J.P.CARON, J.P.HAUTIER,Electrotechnique Modélisation et commandede la machine asynchrone, Editions Technip,Paris 1995.
[3] P.J. Mac Vivar Whelen, « Fuzzy SetsMan-Machine Interaction », In.J.Man-MachineStudies, Vol. 8, pp.687-697,1976.
[4] S. Chand, "on-line, Setf-Monitiring Tunerfor Proportional Integral DerivativeControllers". IEEE Proceedings of 30th
ICEO'11
71

Conference on Decision and Control,December, pp. 1905-1906, 1991.[5] S. Z. He, S. Tan, F. L. Xu, and P. Z. Wang. "fuzzy Self-tuning of PID controllers", fuzzy Sets andSystems, Vol. 56, pp. 37-46, 1993.
[6] Z. Y. Zhao, M. Tomizuka, and S. Isaks, "Fuzzy Gain Scheduling of PID Controller", IEEE Trans,On Systems, Man, and Cybernetics, Vol. 23, No. 5, Sep –Oct, pp. 1392-1398, 1993.
[7] Yuwana, M. and Seborg D. E., "A new Method for On-line Controller Tuning", AICHE J, Vol.28,pp. 434-440.
[8] Y.Miloud, "Etude de l'estimation de la résistance rotorique dans la commande vectorielle d'unmoteur asynchrone en utilisant la logique floue". Thèse Doctorat d'état. 2006.
RESULTAT DE SIMULATION
La figure 6 montre les résultats de simulation des performances dynamiques ainsi que la
robustesse du régulateur PI adaptatif - flou.
Lavi
tess
e(tr
/min
)Le
coup
le(N
.m)
Leco
uran
t(A
)
2×J
J
Pour
suite
dela
vite
sse
Temps (S)
2× Rn
Lavi
tess
e(tr
/min
)
Lavi
tess
e(tr
/min
)
Temps (S)Fig. 6 : Les Performances du régulateur PI adaptatif-flou pour la commande de la vitesse d’un moteur
asynchrone.
ICEO'11
72