Embed Size (px)
Citation preview

Images binaires - 1
IMAGES BINAIRES
1. TOPOLOGIE Connexité Composantes connexes : étiquetage
2. METRIQUE Norme, courbure et orientation Transformée de Hough Distance à une référence Paramètres morphométriques
3. TRAITEMENTS BINAIRES Traitements locaux par LUT Morphologie mathématique Squelettisation
4. EXTENSIONS MULTI-NIVEAUX Morphologie en niveaux de gris
FIN DE PRESENTATION
Voir Prétraitement des images :
Binarisation

Images binaires - 2
TOPOLOGIE
Topologie structure : connexité, dénombrement, nombre de connexité ( ou d’Euler )
Métrique mesure : distance, périmètre, surface
toutes notions sans ambiguïté dans R2, mais problèmes dans N2
NOTIONS DE TOPOLOGIE : CONNEXITE
Maillage carré : 4 voisins ( 4-connexité ) invariance en rotation de k./2
8 voisins ( 8-connexité ) invariance en rotation de k./4
connexité de 2 points : invariance : conservation de la connexité = homotopie
Maillage hexagonal : 6 voisins, en pratique approché par translation ½ pixel, ou interpolation
d’un réseau carré
{ } { }1, 2 X chemin 1 2 Xx x x xÎ Þ $ « Ì
Nombre de connexité : C = Nbre de composantes connexes – Nbre de trous C = Nbre de sommets + Nbre de faces – Nbre d’arêtes
Relation d’Euler : C {X} + C {X} = 1

Images binaires - 3
0 01 0
1 00 0
0 10 0
0 00 1
1 01 1
1 11 0
1 10 1
0 11 1
0 11 0
1 00 1
U
U
U
U U
U U
U 1 00 1
0 11 0
U
TOPOLOGIE ( 2 )
NOMBRE DE CONNEXITE
Calcul en 4-connexité : analyse de la maille élémentaire 2x2, sommet = élément bas / gauche
1 sommet :
1 face :
- 2 arêtes :
En tenant compte des symétries ( 4 sommets / maille )
4 x C4 = Nbre
- Nbre une analyse similaire mène au calcul de C8
+ Nbre
x x1 x
1 11 1
1 x1 x
x x1 1
0 01 0
1 01 0
0 11 0
1 11 0
0 01 1
1 01 1
0 11 1
1 11 1
1 01 0
1 11 0
1 01 1
1 11 1
0 01 1
1 01 1
0 11 1
1 11 1
Enumération des configurationspuis élimination des redondances
C4 = Nbre + Nbre - Nbre0 01 0
0 11 0
1 01 1

Images binaires - 4
TOPOLOGIE ( 3 )
8– ET 4–CONNEXITE
Vérification de la relation d’Euler sur une image binaire C {X} + C {X} = 1 :
Calcul de C4 Calcul de C8
Pixels à 1
{X} {X} {X}
Liens de connexité
C4 {X} =
4 – 0 = 4
C8 {X} =
1 – 1 = 0
{X} {X}C4 {X} =
2 – 1 = 1
C8 {X} =
1 – 4 = -3
Somme = 5 ! Somme = -3 !
Pour conserver la relation d’Euler il faut utiliser la 4-connexité pour {X} ( les régions à 1 )
la 8-connexité pour {X} ( le fond )
alors C4 {X} + C8 {X} = 1

Images binaires - 5
COMPOSANTES CONNEXES
ETIQUETAGE
C4 ne permet pas directement le dénombrement des composantes connexes ( les régions ) d’une
image binaire. De plus il faut pouvoir les différencier attribution d’un identificateur ou étiquette.
Etiquette = numéro identique attribué à chaque pixel d’une même composante connexe. La visualisation de l’image des étiquettes attribue donc une couleur par région.
procédure d’étiquetage ou de coloriage des régions
Principe : balayage de l’image par un motif 3 pixels ( A,B,C )
AB C
Si C ≠ 0 : les étiquettes de A et B déjà fixées imposent l’étiquette du pixel C Si C = 0 : pixel du fond, il reste invariant NB : initialiser bordures haute / gauche à 0 C1 C2
C6
C3
C5
C4
C7C2
A=0,B=1
C=B=1
C3
A=1,B=0
C=A=1
C4
A=B=1
C=A=1
C5
A=0,B=0
N=N+1
C=N=2
C6
A=1,B=2
C=min(A,B)=1
et équivalence
max(A,B) ~ C
2 ~ 1
C7
A=0,B=0
N=N+1
C=N=3
= 1= 2= 3
C1
A=0,B=0
N=N+1
C=N=1
N = Nbre étiquettes ( initialisé à 0 )

Images binaires - 6
COMPOSANTES CONNEXES ( 2 )
GESTION DES EQUIVALENCES
En cas d’équivalence ( exemple 2 ~ 1 ) : retour en arrière et ré-écriture de tous les « 2 » … lent !
mémorisation dans table puis second balayage global
étiquette équivalent ( étiquette )
Chaque ligne de la table d’équivalence est initialisée par son numéro :
0123
2 ~ 1
0113
re-étiquetage
pix = EQ( pix )
EQ
Pbs : pour une image Nx colonnes x Ny lignes
nombres maximum d’étiquettes créées ? nombre maximum d’équivalences à résoudre ?
EQ
Avant re-étiquetage :
renumérotation pournuméros consécutifs
0112
re-étiquetage
pix = EQ( pix )

Images binaires - 7
COMPOSANTES CONNEXES ( 3 )
TABLE D’EQUIVALENCE
Dimension de la table d’équivalence :
nombre maximum d’étiquettes sur une ligne : Nx/2
sur 2 lignes : Nx étiquettes différentes, en damier
dans l’image Nx.Ny/2 nombre de bits des étiquette log2( Nx.Ny ) -1
exemple : 512x512 = 29.29 218 / 2 soit 17 bits
Nombre d’équivalences à résoudre ( fusions ) :
nombre maximum d’étiquettes : Nx/2
sur 2 lignes : Nx/2 fusions, en peigne
peigne isolé sur 3 lignes dans l’image ( Nx.Ny ) /6 fusions exemple : 512x512 maximum ~ 44000 équivalences
Réduction du nombre d’étiquettes et de fusions :
création nouvelle étiquette indispensable en C1 inutile en C2
attente avant création ( retard à l’étiquetage ) de 1…N pixels
en C1 aucune équivalence création et étiquetage a posteriori
en C3 : C2 ~ C1 pas de création, propagation d’étiquette
C1
C2 C3

Images binaires - 8
COMPOSANTES CONNEXES ( 4 )
RETARD INFINI : SEGMENTS CONNEXES
Codage d’une image binaire par segments ( codage RLE « Run Length Encoding » ) :
mémorisation de liste : nbres de lignes et colonnes image
pour chaque ligne, nbre de segments,
colonnes début ( 0↑1 ) et fin ( 1↓0 ) de chaque segment
Ny Nx
Y1 Ns1 D0 F0 D1 F1
Y2 Ns2 D0 F0Intérêt compression, exemple :
taille d’origine : 33600 octets taille de liste : 1768 octets ( 5%, données sur 2 octets )
remarque : le codage RLE peut s’étendre à des images d’étiquettes, début et fin sont remplacés par numéro d’étiquette et nombre de pixel du segment
Etiquetage par connexité de segments, analogue à motif 3 pixels :segment sans voisin à ligne précédente nouvelle étiquette avec 1 voisin connexe à ligne précédente propagation d’étiquette N voisins connexes gestion des équivalences comme pour 3 pixels
Connexité : ( Dn(Y) ≤ Fk(Y-1) ) ET ( Fn(Y) ≥ Dk(Y-1) )

Images binaires - 9
COMPOSANTES CONNEXES ( 5 )
50 100 150 200 250 300
50
100
150
200
250
50 100 150 200 250 300
50
100
150
200
250
1 – Binarisation : image ≤190
50 100 150 200 250 300
50
100
150
200
250
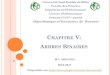
Analyse par motif 3 points
362 étiquettes sans retard80 étiquettes avec 3 attentes26 régions finales
2 - Etiquetage
Segments connexes
57 étiquettes temporaires26 régions finales
Comparaison : motif 3 points ( avec et sans retard à l’étiquetage ) et segments connexes

Images binaires - 10
COMPOSANTES CONNEXES ( 6 )
CHAÎNES D’EQUIVALENCES
Equivalences en cascade ( étiquetage sans retard ) :
fusions multiples chaînées renumérotation de la table ( transitivité )
algorithme pour l’étiquette N : k=N; tant que (k ≠ EQ(k) ) k=EQ(k); EQ(N)=k;
Accélération de l’étiquetage : en C1 2 ~ 1 puis en C2 3 ~ 2 chaînage : 3 ~ 1
C1
C2
si pour la fusion A≠0, B≠0 : C = min(A,B); EQ( max(A,B) ) = C devient
A = EQ(A)C = min( A,B ) B vient d’être calculée donc B = EQ(B)EQ(A) = EQ(B) = C 2 écritures évitent le test du maximum
C1
C2
0123
C1 : 3 ~ 2
0122
EQ EQ 0112
EQ
C2 : 2 ~ 1
0111
EQ 3 ~ 2 2 ~ 1 1 ~ 1
: 3 ~ 1
Moins de cascades d’équivalences caréliminées pour ce type de configuration
0123
C1
0113
EQ 0111
C2

Images binaires - 11
COMPOSANTES CONNEXES ( 7 )
RUPTURE DE CHAÎNE D’EQUIVALENCES
Rupture de la chaîne d’équivalence :
en C1 : 3 ~ 2 puis en C2 : 3 ~ 1 avec l’algorithme C = min(A,B); EQ( max(A,B) ) = C
C1
C2
0123
EQ 0122
0121C1 C2
Pb : « 2 » reste isoléor 2 ~ 1 !
Solution : avec la nouvelle formulation complétée, si fusion A≠0, B≠0
A = EQ(A); C = min( A,B ); EQ(A) = EQ(B) = C
0123
EQ 0122
0112C1 C2
La connexité de « 2 » et « 1 » est résoluereste le chaînage 3 ~ 2 sans problème
forme finale de l’algorithme
A=2, B=3A=EQ(A)=2
A=3, B=1A=EQ(A)=2

Images binaires - 12
50 100 150 200 250 300
50
100
150
200
250
50 100 150 200 250 300
50
100
150
200
250
COMPOSANTES CONNEXES ( 8 )
50 100 150 200 250 300
50
100
150
200
250
1 - Binarisation
50 100 150 200 250 300
50
100
150
200
250
Seuillage : image ≤ 190
362 étiquettes sans retard80 étiquettes avec 3 attentes26 régions finales
2 - Etiquetage
Seuillage : image ≤ 210
343 étiquettes sans retard65 étiquettes avec 3 attentes26 régions finales( ≠ des précédentes )
EXEMPLES
Les couleurs sont modifiées selon la connexité des régions ( ici selon le seuil )
Les couleurs sont réutilisées modulo le nombre de couleurs distinctes affichables

Images binaires - 13
METRIQUE
DISTANCE DE 2 POINTS : NORMES
Différentes normes dans le plan : distance (x0,y0)↔(x1,y1) = ( |x0-x1| N + |y0-y1| N ) 1/N
N = 2 : distance euclidienne D2 = sqrt( ∆x 2 + ∆y 2 ) Pb : complexité de calcul
N = 1 : « city bloc distance » D1 = |∆x| + |∆y|
N = ∞ : « chess board distance » D∞ = max( |∆x|, |∆y| )
Simulation numérique dans plan discret ∆x = 0…100, ∆y = 0…100 :
( % ) erreur relative par rapport à D2 moyenne D1 : 27 D∞ : -10
maximale D1 : 41 D∞ : 0 ( max par excès )
minimale D1 : 0 D∞ : -30 (max par défaut)
calculs simples mais erreurs trop importantes recherche d’une approximation
Combinaison de D1 et D∞, par optimisation : Dc = max( |∆x|, |∆y|, C.(|∆x|+|∆y|) )
critère moy = 0 C = .74171 moy = 0, max < 4.9, - min < 5.6
critère max = - min C = .74514 moy < 0.3, max < 5.4, - min < 5.4
critère de calcul simple C = ¾ moy < 0.7, max < 6.1, - min < 5.2
Pb : précision ?

Images binaires - 14
10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
METRIQUE ( 2 )
COURBES D’ ISODISTANCES
Points à distance 100 de l’origine :
Autre approche, partition angulaire :
10 20 30 40 50 60 70 80 90 100
10
20
30
40
50
60
70
80
90
100
D∞D1D2 ( référence )Dc ( C = ¾ )
D1 ≥ D2 ≥ D∞
3 zones angulaires ( évite « max » )
• horizontale : |∆x| > 2.|∆y| Da = |∆x| • verticale : |∆y| > 2.|∆x| Da = |∆y|• oblique Da = sqrt(2). (|∆x|+|∆y|)/2 ~ ¾ (|∆x|+|∆y|)
angles limites : atan(2) et atan(0.5) soit 63.5° et 26.5°
horizontale
oblique
vertic.
moy < -0.3, max < 6.1, - min < 10.4 mais donne information sur la direction par rapport à horizontale

Images binaires - 15
ORIENTATION
CODAGE DES ORIENTATIONS
Zones angulaires, angles limites 63.5° et 26.5° :
limites optimales pour un codage par pas de /4 : 67.5° et 22.5°
• horizontale : |∆x| > 2.|∆y|• verticale : |∆y| > 2.|∆x| et utilisation du signe pour l’orientation• oblique sinon
Angle = k./4 ( modulo 2. ) k : code de Freeman
• ∆y ≥ 0, ∆x ≥ 0 : k = 0 ... 2• ∆y ≥ 0, ∆x < 0 : k = 2 ... 4• ∆y < 0, ∆x < 0 : k = 4 …6• ∆y < 0, ∆x ≥ 0 : k = 6 …8 (0)
k = 0( référence )
k = 1
k = 2
k = 3
k = 4
k = 5
k = 6
k = 7

Images binaires - 16
ORIENTATION ( 2 )
CHAINE DE FREEMAN
Chaîne de Freeman = liste des codes de Freeman d’un contour de région
origine = coordonnées (x0,y0 ) du 1er point de la région
orientation courante présumée Fc = 0
algorithme de suivi point à point du contour (xc,yc) = (x0,y0) :
recherche point suivant en 8-connexité :
x0
y0
1 23456
1er point non nul dans l’ordre 16, motif tourné de k./4 selon Fc
création listes de x = xc+∆x, y = yc+∆y, F, ∆F
mise à jour du point courant : (xc,yc) = (x,y) et Fc = F si (xc,yc) ≠ (x0,y0) itération, sinon fin de suivi
yc
xc
1 2 3 4 5 6test :
∆F : 2 1 0 -1 -2 -3
F
∆x
∆y
01234567Fc
Table de recherchedu suivant selon Fc
23456701 56701
0-1-1-10111 -10111
-1-101110-1 1110-1

Images binaires - 17
ORIENTATION ( 3 )
Propriétés de quasi-invariance :
invariance stricte en translation
à une « N-plication » des codes près en échelle
à une constante additive k près, modulo 8, en rotation de k./4
descripteur de forme
Chaîne dérivée, courbure :
liste constituée des ∆F : dérivée de l’orientation, invariante en rotation de k./4
x0
y0
F = { 0,7,5,4,4,2,1 }
correction de métrique : si F impair ( diagonale ) longueur associée au code = sqrt(2) si F pair longueur unitaire
courbure en fonction de l’abscisse curvilignemeilleure invariance en rotation
∆F = { -1,-1,-2,-1,0,-2,-1 }
remarques : longueur de liste = périmètre ici tous ∆F ≤ 0 aucune concavité
la liste peut être lissée ( moyenne glissante ) élimination des irrégularités locales

Images binaires - 18
ORIENTATION ( 4 )
EXEMPLE : ORIENTATION ET COURBURE
Pour la visualisation les codes sont : orientation (1) : Fv = 3.F
courbure (2) : ∆Fv = 3.∆F
soit une résolution de /12 ( 15° )
La courbure est lissée par une moyenne 7 points puis mise à l’échelle [1…12]
+ (concave) : 7…12 - (convexe) : 1…6
les 2 courbures sont « comparables »
Contours extérieurs

Images binaires - 19
ORIENTATION ( 5 )
TRANSFORMEE DE HOUGH
Transformation globale de l’espace image en un espace paramétrique.
But : rechercher des structures rectilignes dans une image binaire
Droite de l’espace (x,y) : y = x.tg( /2 + o ) + o / sin(o) soit o = x.cos(o) + y.sin(o)
Transformation : (x,y) (, ) | = x.cos() + y.sin()
Dans l’espace (, ) 1 point (x’,y’) un arc de sinusoïde N points alignés famille de N sinusoïdes
passant par (o, o) définissant la droite
Exemple, soient 3 points de (x,y) : (1,1),(2,0.5),(3,0)
Remarque : est algébrique, donc varie de 0 à les axesx et y sont centrés dans l’image tels que
x = L – Nl / 2 ; y = C – Nc /2
ainsi est l’orientation selon Freeman de la droite dans l’image
x
o
o D
y
0.5 1 1.5 2 3 3.5
0
L
C
o y
x

Images binaires - 20
ORIENTATION ( 6 )
Algorithme : est discrétisé dans [0,] par pas de est discrétisé dansmax,maxpar pas de( oùmax = ½ diagonale )le tableauest initialisé à 0
pour chaque point p(x,y) à 1 et pour chaque valeur de dans [0,] incrémenter la case ( , (,x,y) )
en fin de traitement chaque case contient le nombre de points alignésselon la droite ( + .. + ) : histogramme bidimensionneldont les pics représentent des segments rectilignes.
Variante : utiliser le code de l’orientation du point p(x,y) et ne « voter » que pour cette case accélération du calcul. Exemple ci-dessous avec une résolution de /12
Image binaire et son contour
3 orientations : 0,6,9 soit 0,90°,135°5 droites supports des contours
Espace de Hough
La verticale comporte 2 segments disjoints de
même support

Images binaires - 21
ORIENTATION ( 7 )
Noter :
- la périodicité en ( 0° 180° )
- la présence des 5 pics 2 à 0°, 2 à 90°, 1 à 135°
- les 2 segments verticaux ont été comptabilisés dans la même case de l’histogramme ( même support )
- le bruit de fond autour des pics
Des alignements accidentels ( 3 pts sont toujours alignés ! ), ou deserreurs d’orientation ou de localisation, ou encore un défaut de résolutionen ou provoquent une dispersion des votes localisation des pics plus complexe
( importance du choix de et )
Des objets rectilignes discontinus du faitdu bruit ( lacunes ) pourrons être reconstruits

Images binaires - 22
DISTANCE A UNE REFERENCE
DISTANCE A UN ENSEMBLE DE POINTS
Distance d’un point à un ensemble de référence :
réfPD0
DN
D( P ↔ { réf } ) = min { D0,D1, … DN }
Méthode : le chemin P ↔ Pr Є { réf } est décomposé en cheminsélémentaires dont les coûts sont cumulés : pas horizontal ou vertical coût = 1 pas diagonal coût = sqrt(2)
P
Pr
CN = (7x1h, 3x1v )
C0 = (4x1h, 3x1v )
CPPr = min( C0,…,CN )
L’ensemble des coûts est ainsi calculé, d’où la distance :
D = min { CPPr | Pr Є { réf } } = min ( min { Ci } )
Optimisation : les coûts sont convertis en entiers en multipliant la distance par un coefficient : 1 → 2, sqrt(2) → 2x1.4 ~ 3 : approximation de 2 x distance euclidienne ( 13% par défaut ) 1 → 3, sqrt(2) → 3x1.4 ~ 4 : approximation de 3 x distance ( 8% par excès )
Distances dite de « chamfer » (2-3) ou (3-4)

Images binaires - 23
DISTANCE A UNE REFERENCE ( 2 )
CARTE DES DISTANCES
Généralisation : distance de chaque point à l’ensemble de référence carte des distances
l’ensemble de référence est l’ensemble des points à 1 de l’image
algorithme, phase 1 complémentation image ( distance Pr ↔ { réf } = 0 )
bordure d’image mise à N ( N >> max coeff x distance )
1
1 1
1 1
0
0 0
0 0
99
0
0 0
0 0
phase 2 balayage de l’image par une fenêtre de 5 points, les coûts des points a,b,c,d sont soit déjà calculés ( sens du balayage ) soit imposés par la valeur de la bordure à une valeur neutre, les surcoûts sont ajoutés :
ed
cbae = min(a+C2, b+C1, c+C2, d+C1 ) avec (C1,C2) = (2,3) ou (3,4)

Images binaires - 24
DISTANCE A UNE REFERENCE ( 3 )
phase 2, propagation des distances, les points à N ne sont pas traités :
99
0
0 0
0 0
99
0 2 4 6 8 10
2 3 5 7 9 11
4 5 6 0 0 2
6 7 0 0 2 3
8 3 2 2 3 5
6 5 4 4 5 6
ici (C1,C2) = (2,3)
La causalité du balayage fait que les points en aval
ne sont pas pris en compte
D’où phase 3
phase 3 balayage inverse par motif symétrique : propagation inverse, les coûts initiaux sont recalculés
abc
dee = min( e, a+C2, b+C1, c+C2, d+C1 )
654456
532235
320024
200234
322332
544420
99
remarque : si (C1,C2) = (1,∞) distance D1 si (C1,C2) = (1,1) distance D∞

Images binaires - 25
DISTANCE A UNE REFERENCE ( 4 )
EXEMPLES
Distances des points objets au fond
Distance des points du fond à l’objet
La distance ( chamfer 2-3 ), valeur > 0est représentée par un niveau de gris :
distance croissante gris → blanc

Images binaires - 26
DISTANCE GEODESIQUE
DISTANCE DANS UN ESPACE CONTRAINT
Distance d’un point à un ensemble de référence { réf }, avec espace interdit { int } :
distance euclidienne ≠ distance dite géodésique, longueur réelle du chemin
réf
int
distance euclidiennedistance géodésique ≥ distance euclidienne
L’espace interdit ( contrainte par pixel > 1 ) ne doit pas intervenir dans le calcul des coûts cumulés imposée à valeur N d’initialisation de bordure
Exemple : distance de chamfer (3-4) fond ( 0 : noir ) ↔ référence ( 1 : bleue ) avec contrainte ( 2 : rouge ), valeurs > 1 mises à N puis algorithme double balayage :
Zones interditesdistance ∞ ( N )
Référence,distance = 0

Images binaires - 27
PARAMETRES DE COMPOSANTE CONNEXE
CARACTERISATION D’UNE REGION
Pour chaque composante connexe, calcul de paramètres morphométriques :
paramètres de base surface S = card { pixel(x,y) = 1 }
périmètre P = card { pixels contour }
le contour peut être intérieur ou extérieur à la région
compacité C = 4. S / P2 voir [ binarisation ]
centre de gravité G = xG = 1/S. (x | pixel(x,y) = 1 )
yG = 1/S. (y | pixel(x,y) = 1 )
axes d’inertie : vecteurs propres V1 et V2 de la matrice d’inertie M =
xx = 1/S. (x – xG)2 = 1/S. (x2) – xG2
avec xy = yx = 1/S. (x – xG).(y – yG) = 1/S. (x.y) – xG.yG
yy = 1/S. (y – yG)2 = 1/S. (y2) – yG2
soit : V1 : ( [xx – yy + sqrt( (xx-yy)2 + 4.xy2 )] / 2.xy , 1 )
V2 : ( [xx – yy – sqrt( (xx-yy)2 + 4.xy2 )] / 2.xy , 1 )
NB : si xy = 0 → V1,V2 : (0,1), (1,0)
xx xyyx yy
V1 ┴ V2
Inertie.mws

Images binaires - 28
PARAMETRES DE COMPOSANTE CONNEXE ( 2 )
Paramètres de convexité, rectangle englobant :changement d’axes (x,y) → axes d’inertie V1,V2
rotation d’angle α : tan(2α) = 2.xy / ( xx – yy ) soit
dimensions du rectangle englobant :
L = max(xr) – min(xr)
l = max(yr) – min(yr)
élongation = L / l
rapport des surfaces = S / (L.l)
cos( ) sin( ).
sin( ) cos( )
xr x
yr y
a a
a a
-=
y
x
V1V2
α
Convexité, enveloppe convexe d’une région :convexité : pour tous couples de points P1,P2 de la région,
non convexe convexe
Enveloppe convexe = forme englobante convexe
indice de concavité = S / ( aire enveloppe convexe )
{ }1 2segment P ...P régionÌ

Images binaires - 29
TRAITEMENTS BINAIRES
TRAITEMENTS LOCAUX PAR LUT
Analyse du voisinage en 4- ou 8-connexité calcul d’un descripteur utilisé comme index :
4-connexité, les voisins sont numérotés 0 à 3, le descripteur est :
l’index adresse une table de décision ( LUT ) de taille 2 4 = 16
8-connexité, les voisins sont numéroté 0 à 7, la table comporte 2 x 256 positions :0,3
2 .Pii
iIndex
== å
3 2 1
4 P 0
5 6 70,7
2 .Pii
iIndex
== å
P=0 P=1
01..
P = LUT( P, Index )
LUT
les 2 cas P = 0 et P = 1 sont souvent traités en 2 passes successives sur l’image.les voisinages plus étendus sont difficiles à analyser : 5x5 → table de taille 2 24
~16.8 M positions !
Décision 0 / 1
Adressage de LUT
Application : élimination des lacunes et fausses alarmes isolées lissage ou régularisation des bordures d’objets détection de configurations de voisinage particulières, exemple : enveloppe convexe

Images binaires - 30
TRAITEMENTS BINAIRES ( 2 )
Lacunes et fausses alarmes, configurations établies pour P0 = 0/1, toutes les autres config.
peuvent en être déduites par rotations de /2 : Pi P(i+2)modulo 8 et doivent être ajoutées
3 2 1
4 P 0
5 6 7
x 1 x
x 0 1
x 1 x
x 0 x
0 1 0
x 0 x
( x = indifférent )
Lacune : un 0 avec au moins 3 voisins à 1 est mis à 1P0+P2+P4+P6 >= 3 1
Fausse alarme : un 1 avec 4 voisins à 0 est mis à 0P0+P2+P4+P6 ≠ 0 1
Binarisation :
Img < 160 lacunesImg < 210 fausses alarmes

Images binaires - 31
Lacunes comblées par 2 itérations ( vert )
x 1 x
x 0 1
x 1 x
0 0 x
0 1 1
0 0 x
0 0 0
0 1 x
0 0 x
Fausses alarmes éliminées ( orange )
Lissage des bordures, 2 passes successives, lissage des 0 puis des 1 :
Concavités :
(P0+P2+P4+P6) >= 3 1
Bordure W ( ouest ) aspérités ou pts saillants, notation Matlab :
~(P2 | P3 | P4 | P5 | P6) & (P0| ~P1| ~P3) 0
0 0 x
0 1 x
0 0 0
et rotations de /2
TRAITEMENTS BINAIRES ( 3 )

Images binaires - 32
TRAITEMENTS BINAIRES ( 4 )
x 1 x
x 0 1
x 1 x
x x 1
x 0 1
x 1 1
x 1 1
x 0 1
x x 1
Enveloppe convexe, itérations jusqu’à stabilisation ( invariance ) de l’image, ici convexité 8-C :
P0 & P2 & P6 1P0 & P1 & P7 & P6 1P0 & P1 & P7 & P2 1
Contours lissés ( 0→1 vert, 1→0 orange )
Génération de LUT
Déficience de convexité = { E(X) – X }Point W, ajouter rotation de /2

Images binaires - 33
MORPHOLOGIE MATHEMATIQUE
OPERATIONS DE BASE
Théorie ensembliste basée sur les travaux de Minkowski et Hadwiger, développée par Matheron et Serra.
Notations et définitions :
{ } { }ensemble objet | 1 fond | 0
origine d'un ensemble ( ) : point de référence
symétrique ( ) d'un ensemble par rapport à : s
X x x X x x
o X o
X o o
= = = =
{ }Addition de 2 ensembles et , ou addition de Minkovski :
( ) ( ) ( opération commutative ) dilatation | ( )
de par l'élément structurant :
z Z x Xs
X Z
Y X Z X z Z x Y y S y X
X S Y X S
Î Î= Å = = Þ = Ç ¹ Æ
= Å
U U
Dilatation
Xs(o)
X(o)
Ss(o)X(o)
( )sz S
X zÎU
{ }| ( )y S y XÇ ¹ Æ
S(o), l’élément structurant est caractérisé par son origine, sa forme et ses dimensions
Elément centré, symétrique, de taille minimale en 4-C ou 8-C :

Images binaires - 34
MORPHOLOGIE MATHEMATIQUE ( 2 )
Ss(o)X(o)
( )sz S
X zÎI
{ }| ( )y S y XÇ =Æ
{ } { }Soustraction de 2 ensembles ( Hadwiger ) :
( ) érosion | ( ) | ( )
de par l'élément structurant :
z Zs
Y X Z X z Y y S y X y S y X
X S Y X S
Î= = Þ = Í = Ç =Æ
=
I
Erosion
$
$
{ }
{ } ( )
( ) ( )( )
:
| ( )
| ( )
Autres relations : ( inclusion )
1 2 1 2
1 2
s
s s
s
Y X S y S y X
Y y S y X X S X S X S
X S X X S
X S S X S S
X S S X
= = Ç =Æ ®
= Ç ¹ Æ = Å ® = Å
Ì Ì Å
Å Å = Å Å
=
Dualité des 2 opérations
$
$
$
$ $ $ ( )1 2sS SÅ
Itérations d’opérations :
puis S2S1
S

Images binaires - 35
MORPHOLOGIE MATHEMATIQUE ( 3 )
EXEMPLE : EROSION ET DILATATION
Erosion en 4-C et 8-C :
Les objets de taille inférieure à S disparaissent → pts oranges éliminés,la connexité n’est pas conservée( dissociation de régions ).
Dilatation en 4-C et 8-C :
Les trous de taille inférieure à S disparaissent → pts verts ajoutés, la connexité n’est pas conservée( fusions de régions voisines )
Pour les éléments structurants de taille minimale 4-C ou 8-C, l’érosion correspond à uneélimination d’un pixel de bordure, et la dilatation correspond à une croissance de un pixel en bordure. L’itération de ces opérations conduit donc à des croissances ou contractions de N pixels.
S 4-connexe S 8-connexe

Images binaires - 36
MORPHOLOGIE MATHEMATIQUE ( 4 )
CASCADES D’OPERATEURS
Erosion et dilation modifient la taille globale des régions, la succession des 2 opérations ramènent les objets à leurs dimensions par compensation.
Ci-dessous, exemples pour S = Ss 4-connexe.
Ouverture : érosion puis dilatation
{ }
{ }( ) ( ) | ( )
( ) | ( )
sY X S X S S S y S y X
S y S y X
= = Å = Ì =
Ç =Æ
d $
Fermeture : dilatation puis érosion
{ }( ) ( ) | ( )s sY X S X S S S y S y X= = Å = Ç ¹ Æ# $
sX S$
sX SÅ
X Sd
X S#
Propriétes :
( inclusion )
( ) ( dualité )
( ) et ( ) ( idempotence )
s
X S X X S
X S X S
X S S X S X S S X S
Ì Ì
=
= =
d
d
d d d
#
#
# # #

Images binaires - 37
MORPHOLOGIE MATHEMATIQUE ( 5 )
MISE EN OEUVRE ALGORITHMIQUE
Nous supposons ci-dessous que S est symétrique : S = Ss
Algorithmes basés sur des fonctions booléennes :
dilatation : pour tous pixels
érosion : pour tous pixels
Algorithmes basés sur les cartes des distances, pour S de taille 2.N+1 :
dilatation : calcul des distances dans fond à X puis mise à 1 de
érosion : calcul des distances dans X au fond puis mise à 1 de
Algorithmes basés sur une convolution ( image S ) :
dilatation :
érosion :
: ( ) ( 'ou' booléen )s S
x X x X sÎ
Î ® U
: ( ) ( 'et' booléen )s S
x X x X sÎ
Î ® I
{ }/1| ( )Xx dist x N<
{ }/ 0| ( )Xx dist x N<
{ }| ( ) ( ) 0Y X S y S y X image S= Å = Ç ¹ Æ = Ä ¹
{ }| ( ) ( ) ( )Y X S y S y X image S Card S= = Ì = Ä =$

Images binaires - 38
MORPHOLOGIE MATHEMATIQUE ( 6 )
APPLICATIONS
Les exemples suivants utilisent S = Ss 4-connexe. En orange pts éliminés, en vert ajoutés
Périmètre d’un objet : contour intérieur Ci = X – ( X S ) ou extérieur Ce = ( X S ) - X
S étant en 4-connexité, le contour est 8-connexe ( et inversement )
Sélection de détails de petite taille face à l’élément structurant : D = X – ( X S )
« Top Hat Transform »

Images binaires - 39
MORPHOLOGIE MATHEMATIQUE ( 7 )
APPLICATIONS : « Hit or Miss Transform »
Transformation par tout ou rien - TTR
Les transformations par descripteur de voisinage et LUT peuvent être reformulées :
détection des pts de bordure ouest W( les configurations {S0,S1} ont été répertoriées alphabet de Golay )
0 x 1
0 1 1
0 x 1 10
110
0
V = (P0 & P1 & P7) & (~P3 & ~P4 & ~P5) ( notation Matlab )
2 éléments structurants disjoints mais demême origine S0(o) = { 0 } et S1(o) = { 1 }
{ 1 } { ( | 1( ) ) et ( 0( ) ) }
{ 1 } ( 1 ) ( 0 )ss
V x S x X S x X
V X S X S
= Û Ì Ì
Þ = = Ç$ $
Sous la forme de 2 éléments structurants, il n’y aplus de limite de dimension du voisinage ( # LUT )
NB : contours intérieurs
Ci = X – ( X S )
1
Bordure W : les points oranges sont éliminés
Sw = {S0,S1}
TTR( X,SW )

Images binaires - 40
MORPHOLOGIE MATHEMATIQUE ( 8 )
APPLICATIONS : AMINCISSEMENT / EPAISSISSEMENT
La transformation par tout ou rien ( illustrée ici par Sw ) permet des opérations :
- d’amincissement - d ’épaississement
TR wX - T (X,S ) TR WX T (X,S )È
( amincissement W ) ( épaississement E )
L’application de ces opérations avec les 8 éléments structurants successifs S i selon les 8
orientations de la 8-connexité conduit à des amincissements ou épaississements isotropes.L’itération du cycle d’amincissement par { Si=0,7 } conduit à une invariance ou idempotence :
X X1 X2 invariante ultérieurement
1 2

Images binaires - 41
MORPHOLOGIE MATHEMATIQUE ( 9 )
AMELIORATION D’IMAGE BINAIRE
Rappel : les points oranges sont éliminés ( 1 0 ), les points verts sont ajoutés ( 0 1 ). Ouverture ( 1 ) : l’érosion élimine les fausses alarmes, la dilatation restitue la taille d’origine
Fermeture ( 2 ) : la dilatation « bouche » les lacunes, l’érosion restitue la taille d’origine
1 2
X S = ( X S ) S X S = ( X S ) S
( X S ) S ( X S ) S
puis opération duale :

Images binaires - 42
SQUELETTISATION
NOTION DE SQUELETTE
Graphe (1) caractéristique de la forme d’un objet binaire, qui peut permettre de le reconstituer (2) 1 - c’est un ensemble de points connexes2 - c’est une transformation réversible
Deux définitions similaires dans R2 ( mais non dans N2 ) :
- Lieu des centres des disques de rayon maximum inscrits dans l’objet, le rayon en chaque point permet de reconstruire l’objet.
- Axe médian, ensemble des points équidistants de 2 bords de l’objet, cette définition correspond à l’état stable obtenu par érosions successives sans perte de connexité. La distance aux bords permet la reconstruction.
==

Images binaires - 43
SQUELETTISATION ( 2 )
PROPRIETES
- invariance présumée en rotation- sensibilité aux détails des objets : irrégularité des bordures, lacunes … éventuel lissage des bordures avant squelettisation ( voir traitements par LUT )
Nombreux algorithmes et versions multiples, aboutissant à des squelettes légèrement différents :
- algorithmes parallèles : érosions conditionnelles sans propagation d’information- algorithmes séquentiels : érosions conditionnelles avec propagation des modifications in situ- algorithmes basés sur la recherche de maxima locaux dans une carte de distance
lacune irrégularitélocale

Images binaires - 44
SQUELETTISATION ( 3 )
ALGORITHMES D’ EROSION CONDITIONNELLE
Algorithme parallèle : itération d’amincissements avec conservation de la connexité
cas de la bordure W ( configurations similaires pour les autres bordures ), P 0 si :
3 2 1
4 P 0
5 6 7
0 1 x
0 1 1
0 1 x
0 0 x
0 1 1
x 1 x
( x = indifférent )
Du fait du parallélisme les bandes de largeur paire ( 2 pixels )disparaissent configurations de conservation sur 4 points:
~P4 & P & P0 & ~P8 P = 1~P2 & P & P6 & ~P9 P = 1
9
8
110
110
110
00
00
00
Algorithme séquentiel : les modifications s’effectuent dans l’image en cours de balayagece qui introduit une dépendance du sens de balayage
configurations essentielles ( sans modification ), cas de la bordure W :
1 0 x
0 1 x
x x x
x x x
0 1 x
1 0 x
x 0 0
0 1 1
x 0 0
- si x = 0 P est une extrémité- si x = 1 P est un lien de connexité locale

Images binaires - 45
SQUELETTISATION ( 4 )
ALGORITHMES D’ EROSION CONDITIONNELLE
Algorithme séquentiel, dernière configuration ( 4 configurations essentielles ) :
y y y
0 1 0
x x x
- si x,y = 0 P est un point isolé ( à conserver )- si x et y = 1 P est un lien de connexité locale- si x = 0 et y = 1 P est une extrémité ou un lien de connexité
Les points essentiels sont des points du squelette, les numéros des itérations où ils sont déclarésessentiels correspondent aux rayons des disques centrés sur ces points.
Les points non essentiels sont marqués, valeur < 0, puis sont éliminés en fin de balayage.
Séquencement des itérations :
Initialisation : Iter = 1
Itération tant que des points sont éliminés, 2 sous cycles pour symétriser le squelette :
1 - test bordures E,W si essentiel P = Iter, sinon marqué2 - test bordures N,S non marquées si essentiel P = Iter, sinon marquéPoints marqués = 0, Iter = Iter +1
Fin d’itérations { P > 0 } = squelette valué

Images binaires - 46
SQUELETTISATION ( 5 )
ALGORITHMES BASE SUR LES CRETES DE DISTANCES
Pour les algorithmes précédents, le nombre de passes dépend de la taille des objets, pourl’algorithme basé sur les maximums locaux de la carte des distances il n’y a que 3 passes :2 passes pour la carte des distances + 1 pour la recherche des lignes de crêtes
Principe : - calcul des distances des points des objets au fond : chamfer - seuillage éventuel pour éliminer les irrégularités locales - maximums locaux directionnels
si maximum strict, sur 3 points a b c : (b > a) & (b > c)
problème de squelette non connexe, exemple avec la norme D, les maximums stricts sont en gras, reste le 2 central :
d’où tests de maximums relatifs sur 4 points a b c d :
crête : ((b > a) & (b > c)) | ((b > a) & (b = c) & (c > d))
Profil de crête : ou selon les 4 directions à /4
0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 1 2 1 0 0 0 1 1 1 2 1 1 0 0 1 2 2 2 2 1 0 0 1 2 3 3 2 1 0 0 1 2 2 2 2 1 0 0 1 1 1 1 1 1 0 0 0 0 0 0 0 0 0

Images binaires - 47
SQUELETTISATION ( 6 )
RESULTATS : VARIABILITE DU SQUELETTE
Sans régularisation des bordures
Avec régularisationdes bordures
Algorithmes
Parallèle Séquentiel Crêtes de distances (3-4)
( seuil = 6 )

Images binaires - 48
SQUELETTISATION ( 7 )
QUALITE DU SQUELETTE ?
Sans régularisation des bordures
Avec régularisationdes bordures
Algorithmes
Parallèle Séquentiel Crêtes de distances (3-4)
( seuil 9 )

Images binaires - 49
SQUELETTISATION ( 8 )
CAS PARTICULIER : OBJETS MINCES
Dans le cas d’objets de faibles épaisseurs ( < 5 pixels par exemple ) une approche parconvolution est rapide, 2 passes sur l’image :
axe médian = lignes des crêtes de l’image convoluée par un masque triangulaire
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
Exemple 2Dpointillé noir : image binaire
IB k.[1 2 3 2 1]
les 2 zones distinctes ne sont pas résolues
IB k.[1 2 8 2 1]
max(coeff) > somme(coeff) – max(coeff)
les maximums locaux (non stricts) donnent les axes médians

Images binaires - 50
SQUELETTISATION ( 9 )
ZONES D’ INFLUENCE
Le squelette du fond { x | x = 0 } donne, après élimination des branches pendantes, les limites des zones d’influence des objets.
Branche pendante = partie du squelette ayant une ( ou plus ) extrémité libre, ici le squelette doit être constitué de boucles fermées si le bord de l’image est considéré comme un objet.
Squelette de ~X ( vert ) Zones d’influence : étiquetage des régionsdélimitées par le squelette du fond
Bord à 1
La zone d’influence d’un objet est l’ensemble des points à distance de cet objet inférieureaux distances des autres objets.

Images binaires - 51
EXTENSIONS MULTI-NIVEAUX
MORPHOLOGIE MULTI-NIVEAUX
Bases ensembliste : analogie des opérations 2D binaires d’érosion et dilatation L’image en niveaux de gris ( espace N3 ) est représentée par son sous-graphe :
g g(x)
x
-
Sous-graphe de g(x) : x N2, g N SG( g(x) ) = { (x,g) | g g(x) }
L’élément structurant est aussi représenté par son sous-graphe
élément structurant So(x) 3Dcentré en o
Les opérations de base se ramènent donc à des unions / intersections / complémentations ensemblistes :
Erosion : Y = X S = { y | Sy X } { (y,g) | SG( Sy(x)+g) ) SG( X(x) )
Dilatation par dualité : Y = X S = ( X Ss ) { (y,g) | SG(-Sy(-x)+g ) SG( X(x) ) }
SG( g(x) )
x
g
SG( g(x) ) Noter pour Ss la symétrie 3D
x

Images binaires - 52
EXTENSIONS MULTI-NIVEAUX ( 2 )
OPERATIONS DE BASE
Erosion : Y = X S { (y,g) | SG( Sy(x)+g ) ) SG( X(x) ) }
x
So(x)
X(x)
g(x) = érodé( X(x) )
Analogie avec un palpeur suivant le profil X(x)l’érodé est la trajectoire du point de référence( ou origine ) du palpeur.
La forme 3D du palpeur ( élément structurant )fixe son comportement dans les pics de X(x) érosion des pics
Expression analytique pour S centré en xo : x [xo-x1…xo+x2] X(x) – ( Sxo(x)+g(xo) ) 0 g(xo) = min( X(x) – Sxo(x) )
Il s’agit donc d’une transformation non linéaire contrairement aux filtres classiques
La translation de niveaux qui peut amener des g < 0, peut être compensée par une translation de valeur max( So(x) ), sans changer le profil de g(x) :
g(x) = min( X – Sx ) + max( S )
g
-x1 x2

Images binaires - 53
EXTENSIONS MULTI-NIVEAUX ( 3 )
Dilatation : Y = X S { (y,g) | SG( -Sy(-x)+g ) ) SG( X(x) ) }
x
So(x) X(x)
g(x) = dilaté( X(x) )
Même analogie avec un palpeur :
La forme 3D du palpeur ( élément structurant )fixe son comportement dans les vallées de X(x) comblement des vallées
Expression analytique pour S centré en xo : x [xo-x1…xo+x2] X(x) + Sxo(x) g(xo) g(xo) = max( X(x) + Sxo(x) )
La translation de niveaux peut amener des g > gmax, d’où une translation optionnelle devaleur - max( So(x) ), sans changer le profil de g(x) :
g(x) = max( X + Sx ) - max( S )
Remarque, cas particulier de l’élément structurant « plat » : x [-x1…x2] So(x) = 0
filtres ‘ inf ’ : érosion = min( X ) et ‘ sup ‘ : dilatation = max( X ) ( voir lissage des bruits – opérateurs de base )
g
-x1 x2

Images binaires - 54
-2-1
01
2
-2
0
2-4
-2
0
2
4
EXTENSIONS MULTI-NIVEAUX ( 4 )
ouverture : X S = ( X S ) S )
fermeture : X S = ( X S ) S)
« top hat » : X – ( X S )
lissage morphologique ( non linéaire ) : ( X S ) S ou ( X S ) S
gradient morphologique : ( X S ) – X ou X - ( X S ) ou ( X S ) – ( X S )
laplacien morphologique : ( X S) + ( X S) – 2.X
OPERATIONS COMBINEES
Elément structurant 5 x 5
-4 -1 0 -1 -4
-1 2 3 2 1
0 3 4 3 0
-1 2 3 2 1
-4 -1 0 -1 -4
Forme 3D

Images binaires - 55
EXTENSIONS MULTI-NIVEAUX ( 5 )
EXEMPLES
Image originale
Ouverture Fermeture
Lissages
fermeture ouverture
Gradientmorphologique

Images binaires - 56
EXTENSIONS MULTI-NIVEAUX ( 6 )
AMINCISSEMENT / EPAISSISSEMENT
Par analogie avec la morphologie binaire, deux éléments structurants multi-niveaux disjointspermettent de définir l’amincissement AMM et l’épaississement EPM multi-niveaux :
-N -N 1
-N 1 1
-N -N 1
S1 = S0 =
1 -N -N
1 -N -N
1 -N -N
-N = - « infini », élément neutre de l’opération, les pixelscorrespondants ne sont pas traités.
Ici exemple de l’élément structurant ouest W
0 0 1sup ( ) si sup ( ) inf ( )( )
sinonS S SX X X X
AMM XX
< £=
0 1 0inf ( ) si sup ( ) inf ( )( )
sinonS S SX X X X
EPM XX
£ <=
Amincissement et épaississement isotropes sont obtenus par application successive des {S0,S1}correspondants aux 8 orientations de la 8-connexité ( rotations de 45° ).

Images binaires - 57
Intuitivement : amincissement contraction des plages claires épaississement extension des plages claires
EXTENSIONS MULTI-NIVEAUX ( 7 )
X image d’origine
AMM(X)
EPM(X)

Images binaires - 58
RETOUR AU PLAN
FIN DE PRESENTATION
FIN DE PRESENTATION

Images binaires - 59
GENERATION DE LUT - CODE MATLAB
EXEMPLE : LISSAGE DES BORDURES
Code Matlab pour établir les LUTs :
function [Lut0,Lut1]=lislutV8=[0:255];P0=bitget(V8,1); P1=bitget(V8,2); P2=bitget(V8,3); P3=bitget(V8,4);P4=bitget(V8,5); P5=bitget(V8,6); P6=bitget(V8,7); P7=bitget(V8,8);Modif=(~P0 & ~(P1|P2|P6|P7) & (~P3|P4|~P5)) | ... (~P2 & ~(P3|P4|P0|P1) & (~P5|P6|~P7)) | ... (~P4 & ~(P5|P6|P2|P3) & (~P7|P0|~P1)) | ... (~P6 & ~(P7|P0|P4|P5) & (~P1|P2|~P3));Lut1=~Modif; % Pc=1 : si modif -> 0Lut0=((P0+P2+P4+P6) >= 3);
x 1 x
x 0 1
x 1 x
0 0 x
0 1 1
0 0 x
0 0 0
0 1 x
0 0 x
2 passes successives, lissage des 0 puis des 1 2 LUTs ( Lut1 et Lut0 ) :
Concavités :
(P0+P2+P4+P6) >= 3 1
Bordure W ( ouest ) aspérités, pts saillants, en notation Matlab :
~(P2 | P3 | P4 | P5 | P6) & (P0| ~P1| ~P3) 0
0 0 x
0 1 x
0 0 0
( et rotations de /2 )

Images binaires - 60
ZOOM – LACUNES

Images binaires - 61
ZOOM – FAUSSES ALARMES

Images binaires - 62
ZOOM – LISSAGE BORDURES

Images binaires - 63
CONTOURS – ORIENTATION

Images binaires - 64
CONTOURS – COURBURE