Embed Size (px)
Citation preview

AgroParisTech
Master de Sciences et Technologies du Vivant
Mention Biologie, spécialité Écologie Biodiversité Évolution
Année universitaire 2006 – 2007
Influence de la distribution des ressources sur la valeur sélective
d’un prédateur à place centrale : une approche par modélisation
Soutenance le 19 juin 2007
Nicolas Hanuise
Stage réalisé sous la codirection de Christophe Guinet et de Pablo Inchausti
Centre d’Études Biologiques de Chizé – CNRS UPR 1934

Remerciements
Mes premiers mots vont à Vincent Bretagnolle et à Henri Weimerskirch, qui m’ont
respectivement permis d’intégrer le laboratoire et l’équipe des prédateurs marins.
Je remercie Christophe Guinet pour m’avoir proposé ce travail. Merci de ta confiance, et
merci de m’avoir donné l’occasion de remettre les pieds dans les TAAF. Que la suite nous
permette de continuer cette collaboration.
Je remercie également Pablo Inchausti pour avoir accepté de co-encadrer ce stage. Merci pour
ton accueil au laboratoire, ton point de vue de modélisateur et tes commentaires constructifs.
Merci à Morgane Viviant, dont les travaux de l’an passé ont constitué la base de cette étude.
Merci à l’ensemble du personnel du laboratoire pour les 5 mois passés ici. Une pensée
particulière à tous les habitués de la grande cuisine.
Je remercie mes nombreux chauffeurs pour avoir grandement facilité mes allées et
venues entre la gare de Niort et le parking du CEBC : Nathalie Coffineau, Raphaëlle Dhennin,
Simon Ducatez, Aurélie Goutte, William Huin, Mael Le Corre, Alexandre Martin, Catherine
Michel, Stéphane Mortreux , Florian Picaud, Virginie Rolland, Carole Sainglas et quelques
anonymes.
À π aussi, en souvenir d’Aline, pour qu’elle revienne…
Merci aussi à tous mes correcteurs de la dernière minute : Aurélie, Florian, Simon, William
avec une mention spéciale pour Pierrot.
Merci enfin à mes parents et à Chrystèle d’être toujours là à mes côtés.

1
Sommaire
Introduction .............................................................................................................................. 2
Stratégies d’approvisionnement ............................................................................................. 2
Stratégies de déplacement ...................................................................................................... 3
Choix du modèle .................................................................................................................... 3
Objectifs ................................................................................................................................. 5
Modèle ....................................................................................................................................... 6
Généralités.............................................................................................................................. 6
Paramètres du modèle ............................................................................................................ 6
Habitat et ressource alimentaire ............................................................................................. 6
Déroulement des simulations ................................................................................................. 8
Modes de déplacement ......................................................................................................... 11
Mémorisation ....................................................................................................................... 12
Sorties du modèle ................................................................................................................. 13
Simulations effectuées.......................................................................................................... 14
Analyses de sensibilité ......................................................................................................... 14
Résultats .................................................................................................................................. 15
Balance énergétique et variation de masse........................................................................... 15
Trajets simulés...................................................................................................................... 16
Survie des femelles............................................................................................................... 17
Survie des jeunes.................................................................................................................. 17
Taux de croissance juvénile ................................................................................................. 18
Durée et distance totale des trajets en mer ........................................................................... 19
Effet de la distance ............................................................................................................... 19
Effet de la prédictibilité........................................................................................................ 19
Analyses de sensibilité du modèle ....................................................................................... 20
Confrontation aux données réelles ....................................................................................... 21
Discussion................................................................................................................................ 23
Effet des différents modes de déplacement.......................................................................... 23
Effet de l’abondance locale de la ressource ......................................................................... 25
Conclusion............................................................................................................................ 27
Perspectives.......................................................................................................................... 27
Bibliographie........................................................................................................................... 28

2
Introduction
Stratégies d’approvisionnement
Les stratégies d’approvisionnement sont des comportements qui déterminent comment
les individus acquièrent des ressources alimentaires, dans un environnement où leur
distribution est généralement hétérogène et soumise à des variations au cours du temps
(Cézilly and Benhamou 1996). La quantité et la qualité de la ressource acquise sont des
déterminants directs de la survie et de la reproduction ; les stratégies d’approvisionnement
influencent donc de manière indirecte la valeur sélective des individus (Lemon 1991; Ritchie
1990; Georges and Guinet 2000).
La théorie de l’approvisionnement optimal (optimal foraging theory, OFT) postule que
les stratégies de recherche alimentaire permettant d’optimiser l’acquisition de ressources sont
sélectionnées au cours de l’évolution (Stephens and Krebs 1986). Le champ de cette théorie
est essentiellement divisé en l’étude du régime alimentaire, ou sélection de proie (MacArthur
and Pianka 1966) d’une part, et en l’étude de la distribution spatiale et temporelle de la
recherche d’autre part (Pyke 1984). Cette seconde partie regroupe plusieurs aspects : la
sélection et le départ de patch1 (Charnov 1976), ainsi que les déplacements entre et à
l’intérieur des zones d’alimentation. Ces différents volets sont basés sur une approche
économique coût/bénéfice des stratégies d’approvisionnement : l’optimalité consiste à
maximiser le gain énergétique net, différence entre le gain énergétique brut lié à l’assimilation
et la dépense énergétique résultant des activités de recherche, de poursuite, de capture et de
manipulation d’une proie (Stephens and Krebs 1986).
Certains animaux sont contraints de limiter leur approvisionnement autour d’un lieu
où ils reviennent régulièrement. De nombreuses espèces présentent ce comportement, en
particulier des insectes sociaux vivant en colonie, et de nombreux oiseaux et mammifères,
notamment en période de reproduction (Kramer and Nowell 1980; Kacelnik 1984; Kacelnik et
al. 1986). La ressource peut alors être consommée immédiatement pour subvenir aux besoins
énergétiques propres de l’individu ou être conservée pour un usage ultérieur lors du retour au
site de reproduction : stockage de nourriture ou nourrissage de la progéniture. Enfin, la
1 Dans un environnement où la distribution de la ressource est spatialement hétérogène et
discrète, un patch désigne une région délimitée de l’espace contenant une quantité finie de
ressource, au sein d’un environnement plus pauvre (Cézilly and Benhamou 1996).

3
ressource peut également être consommée et transformée en un produit délivré à la
progéniture, comme le lait chez les mammifères. Cette stratégie, appelée approvisionnement à
partir d’une place centrale (central place foraging, CPF) induit des contraintes spécifiques en
termes de temps, de distance et d’énergie (Orians and Pearson 1979). L’efficacité de la
stratégie de recherche est alors mesurée par la quantité nette d’énergie rapportée au nid. Afin
de conserver un bilan net positif, un individu doit donc contrebalancer le coût des voyages de
recherche alimentaire, lié en particulier à la distance parcourue et au mode de prospection, par
la quantité de ressource acquise, qui doit être augmentée lors des voyages les plus coûteux.
Stratégies de déplacement
Les stratégies de déplacement ont une influence directe sur l’optimalité de la recherche
alimentaire. Les animaux mobiles peuvent marcher, voler ou nager à la recherche de leurs
zones d’alimentation et adapter leurs déplacements en fonction de l’environnement et de leurs
interactions avec d’autres individus. Leurs modes de déplacement peuvent être caractérisés
par l’analyse des trajectoires : longueur de segments linéaires élémentaires et changements de
direction (Turchin 1998). Ces paramètres permettent de définir des comportements comme la
recherche en zone restreinte (area-restricted search) (Fauchald and Tveraa 2003), une
adaptation du mouvement en réponse à la ressource qui induit un temps de résidence prolongé
en milieu plus profitable. Cependant, par souci de simplification, la plupart des modèles
théoriques d’étude de l’approvisionnement optimal considèrent souvent que l’individu est
omniscient et se déplace directement d’une zone d’alimentation à la suivante, sans prise en
compte explicite du trajet (Charnov 1976; Cézilly and Benhamou 1996). En effet, grâce à leur
système sensoriel, les animaux peuvent acquérir de l’information visuelle, olfactive ou
auditive sur l’emplacement, la qualité ou la quantité de la ressource, ainsi que sur ses
variations au cours du temps. Dans certains cas, en particulier en milieu marin, l’éloignement
ou l’inaccessibilité des zones d’alimentation rend plus difficile leur détection à distance, bien
que des repères visuels ou olfactifs existent (Nevitt 1999). La prise en compte explicite des
stratégies de déplacement paraît donc nécessaire dans l’étude de l’approvisionnement en
milieu hétérogène.
Choix du modèle
Notre objectif est ici de déterminer l’influence relative de différentes stratégies
d’approvisionnement et de la distribution de la ressource sur l’efficacité de pêche et le succès
reproducteur d’un prédateur marin s’approvisionnant à partir d’une place centrale. L’approche
par modélisation est une solution intéressante aux échelles spatiales et temporelles

4
concernées, où la manipulation expérimentale est difficile. De plus, l’utilisation d’un modèle
spatialement explicite (Grunbaum 1998) permet de simuler la distribution de la ressource,
choix particulièrement intéressant dans un environnement comme le milieu marin pour lequel
peu de données sont disponibles. La variabilité temporelle de la ressource alimentaire en
qualité, quantité et accessibilité ainsi que sa prédictibilité pourront ainsi être prises en compte.
Le modèle doit permettre l’incorporation de règles comportementales, c’est-à-dire des
décisions prises par le prédateur au cours de la recherche alimentaire : choix de s’alimenter
dans une zone particulière ou de se déplacer vers une autre zone, ainsi que les lois régissant
son déplacement. Enfin, le modèle doit également intégrer une dimension de métabolisme
énergétique pour prendre en compte le bilan net lié à l’assimilation de ressource et aux
différentes activités.
Au sein d’une population, il existe une importante variabilité inter-individuelle :
génétique, phénotypique, comportementale, cognitive et spatiale (McNamara and Houston
1996). Ces différents facteurs propres à chaque individu ont un impact sur sa capacité à
survivre et à se reproduire, c’est-à-dire sur sa valeur sélective. La modélisation explicite de
ces différentes sources de variation est l’objet des modèles individu-centrés (individual-based
model, IBM) (DeAngelis and Mooij 2005; Grimm and Railsback 2005). Ces modèles
permettent de prendre en compte les caractéristiques propres d’un individu comme sa
localisation dans l’environnement, l’état de ses réserves énergétiques, son expérience, et
d’évaluer leur influence sur ses choix en terme de stratégie d’approvisionnement. Ces
caractéristiques affectent donc la capacité d’un individu à acquérir de la ressource alimentaire,
et au final sa survie et son succès reproducteur.
Un modèle individu-centré spatialement explicite permettant de considérer d’une part
les mécanismes comportementaux et énergétiques au niveau individuel, et d’autre part les
stratégies de déplacement au sein d’un champ de ressource alimentaire, a été choisi. Ce
modèle permet d’évaluer les conséquences des variations d’abondance, de distribution,
d’accessibilité et de prédictibilité des ressources sur la survie et la reproduction des individus,
qui sont des indices de leur valeur sélective. Dans le cadre de l’étude présente, le modèle a été
construit pour l’otarie à fourrure antarctique Arctocephalus gazella. Chez cette espèce, les
femelles en période de reproduction s’approvisionnent à partir d’une place centrale. Un
ensemble d’études préalables (voir dans la partie Paramètres du modèle) concernant le
métabolisme énergétique, le déplacement individuel et les zones d’alimentation de ces
animaux ont fourni les données permettant de le paramétrer.

5
Objectifs
Dans le cadre théorique général de l’approvisionnement optimal, cette étude vise à
déterminer l’influence des variations de la structuration spatiale des ressources alimentaires et
des stratégies de déplacement sur la valeur sélective de femelles otaries opérant à partir d’une
place centrale. La valeur sélective individuelle a été déterminée par l’analyse des taux de
survie et de croissance des jeunes. Nous avons formulé deux objectifs principaux :
• Comparaison de l’efficacité de deux stratégies de déplacement pour déterminer si
une marche aléatoire suffit à assurer le succès reproducteur ou si au contraire la prise
en compte d’indices environnementaux au cours du déplacement est nécessaire.
L’influence d’une éventuelle mémorisation des sites de pêche a également été
déterminée.
• Évaluation de l’influence de la distribution de la ressource, par la modification de
son abondance, de son agrégation et de sa prédictibilité. L’effet attendu d’une
diminution de l’abondance et de la prédictibilité de la ressource est une diminution
du succès reproducteur. L’effet d’une augmentation du niveau d’agrégation de la
ressource pourrait être une augmentation de l’efficacité des individus capables de
mémoriser l’emplacement des zones d’abondance élevée.
Enfin, la validation des sorties du modèle a été effectuée par une confrontation des
résultats issus du modèle avec des données réelles.

6
Modèle
Généralités
Le modèle individu-centré spatialement explicite écrit sous R 2.4.1 (R Development
Core Team 2006) simule les déplacements et la balance énergétique d’un prédateur
s’approvisionnant à partir d’une place centrale, ainsi que la masse de sa progéniture de la
mise-bas au sevrage. Au cours de chaque pas de temps, les individus effectuent une prise de
décision (déplacement, alimentation, nourrissage…) et leur balance énergétique est affectée
en conséquence.
Un tel modèle est générique et peut facilement être adapté à toute espèce
s’approvisionnant à partir d’une place centrale ; il nécessite cependant la connaissance de
paramètres énergétiques. Il est particulièrement adapté au milieu marin où la distribution de la
ressource alimentaire est difficilement accessible et peut alors être simulée. Dans ce travail, le
modèle a été utilisé pour modéliser la balance énergétique et le succès reproducteur d’un
mammifère marin pour lequel de nombreux paramètres énergétiques sont connus.
Paramètres du modèle
Le modèle est paramétré pour l’otarie à fourrure antarctique Arctocephalus gazella, un
mammifère marin de l’océan Austral ne venant à terre sur les îles-subantarctiques que pour la
reproduction. Aux Îles Kerguelen (49°S, 70°E), les femelles rejoignent les colonies en
novembre et donnent naissance à un nouveau-né unique au cours du mois de décembre, au
début de l’été austral. L’élevage du jeune dure 4 mois, période pendant laquelle les femelles
ont un comportement d’approvisionnement à partir d’une place centrale en alternant voyages
en mer vers les sites d’alimentation, situés en bordure du plateau continental et à proximité du
front polaire, et séjours à terre pour l’allaitement (Guinet et al. 2001; Bonadonna et al. 2000).
Dans cette zone, leur alimentation est constituée essentiellement de petits poissons, en
particulier de la famille des myctophidae (Lea et al. 2002). L’ensemble des paramètres utilisés
figure dans le tableau 1.
Habitat et ressource alimentaire
L’habitat marin est modélisé par une grille bidimensionnelle de 101 × 101 cellules
carrées identiques de 10 × 10 km2. La cellule située au centre de la grille constitue la colonie
de reproduction, site terrestre de naissance et d’élevage des jeunes. La région couverte
représente donc un rayon de 500 km autour de la colonie.

7
Distribution – Les données sur la distribution spatiale de la ressource alimentaire des
otaries autour des Îles Kerguelen sont restreintes (Guinet et al. 2001). En effet, la zone
d’alimentation des otaries de Kerguelen couvre plusieurs dizaines de milliers de kilomètres
carrés ; et les poissons myctophidae dont elles se nourrissent se trouvent à une profondeur
moyenne de 50 mètres, ce qui rend difficile une mesure précise de la distribution des proies à
ces échelles. En revanche, l’étude de la distribution spatiale des sites de pêche par l’analyse
des enregistrements simultanés de la position (balises Argos) et du comportement de plongée
(capteurs de pression) révèle qu’ils sont généralement situés dans un rayon de 50 à 400 km de
la colonie (Bonadonna et al. 2001). L’hypothèse est faite que cette distribution reflète, dans
une certaine mesure, celle de la ressource. Cette répartition correspond probablement à des
régions de haute productivité : front polaire et bordure du plateau continental (Guinet et al.
2001). Les otaries ne s’alimentent apparemment pas sur le plateau péri-insulaire de
Kerguelen. La distribution de la ressource dans le modèle prend en compte ces observations :
en conséquence, seules les cellules situées dans une zone d’alimentation potentielle constituée
d’un anneau centré sur la colonie sont ainsi susceptibles de contenir de la ressource. Il existe
donc une zone proche de la colonie dépourvue de ressource en deçà d’une distance minimale.
Dans le modèle, la ressource est caractérisée par trois paramètres : son abondance, son
agrégation et sa prédictibilité, dont les variations seront testées.
Abondance – L’abondance locale est caractérisée par un indice Qi compris entre 0 et
10 unités exprimant la quantité de ressources alimentaires contenue dans chaque cellule. En
absence de données sur l’abondance réelle des proies, cet indice est proportionnel à la quantité
d’énergie qu’elle représente. L’abondance totale à l’échelle du paysage global est la somme
de l’abondance locale dans chacune des cellules de la carte. Elle varie de 4 000 unités de
ressource pour un milieu pauvre à 12 000 pour un milieu riche. L’épuisement de la ressource
par les otaries n’est pas modélisé.
Agrégation – La distribution spatiale de la ressource est précisée par un niveau
d’agrégation à l’échelle locale. Dans le modèle, cette agrégation est caractérisée par un
variogramme gaussien isotrope, qui représente l’autocorrélation spatiale de la ressource à
différentes échelles. Le variogramme est une méthode géostatistique (Dale et al. 2002) utilisée
pour décrire le fait que les abondances en poisson (ou toutes autres mesures) en deux lieux
situés l’un près de l’autre doivent se ressembler davantage qu’en deux lieux plus éloignés. La
portée h du variogramme représente la distance au-delà de laquelle la corrélation entre deux
observations devient nulle ; elle fournit donc une mesure de l’agrégation de la ressource.
Différentes cartes avec une variation continue du niveau d’agrégation sont modélisées : d’une

8
ressource faiblement agrégée (portée égale à 1) à une ressource fortement agrégée (portée
égale à 10). Des distributions aléatoires correspondant à une portée théorique nulle ont
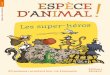
également été simulées (Figure 1).
Prédictibilité – La prédictibilité de la ressource est modélisée par le changement de
l’indice d’abondance des cellules au cours du temps. À une fréquence régulière, d’autant plus
basse que la prédictibilité de la ressource est élevée, chaque cellule de la zone d’alimentation
potentielle prend l’indice d’abondance de sa voisine de gauche. Pour la gestion de ce
phénomène de « dérive » de la ressource, les bordures droite et gauche de la zone sont
considérées comme étant directement en contact. Des vitesses de dérive de 0 à 4 cellules par
jour (soit 0 à 40 km.j-1) choisies dans la gamme des vitesses du Courant Circumpolaire
Antarctique autour de Kerguelen (Park et al. 1991) ont été utilisées dans les simulations.
Déroulement des simulations
Début et fin - Initialement, les femelles viennent de donner naissance à un jeune de
masse Minit chacune. Elles sont alors situées sur la colonie de reproduction, avec des réserves
énergétiques initiales Einit. La simulation prend fin après l’écoulement des 120 jours de la
période d’élevage, décomposés en pas de temps élémentaires de 2 heures.
Choix possibles – À chaque pas de temps, les femelles effectuent une des actions
suivantes : à terre (i) quitter la colonie ou (ii) allaiter leur petit ; en mer (iii) s’approcher de la
Figure 1. Quatre cartes de
distribution de la ressource
alimentaire simulées avec
des niveaux d’agrégation
différents. La portée est
notée h. Distributions (A)
aléatoire (h = 0), (B)
faiblement agrégée (h = 2),
(C) moyennement agrégée
(h = 5) et (D) fortement
agrégée (h = 10). L’étoile
signale l’emplacement de la
colonie. **
**
A B
C D

9
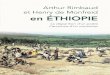
colonie, (iv) se déplacer à la recherche d’un site d’alimentation ou (v) plonger pour
s’alimenter (Figure 2). Une otarie à terre quitte la colonie lorsque ses réserves énergétiques
descendent sous leur niveau initial (soit initEE ≤ ) ou lorsque son jeune est mort. Dans le cas
contraire elle allaite son jeune. Une otarie en mer décide de retourner à la colonie si ses
réserves énergétiques sont entièrement remplies (soit maxEE = ) ou si la durée de son voyage
en mer dépasse un certain seuil et que ses réserves énergétiques lui permettent d’effectuer le
voyage retour sans entamer ses réserves vitales. Dans le cas contraire l’otarie effectue sur
place des plongées alimentaires avec une probabilité Pp ou se déplace à la recherche d’un
nouveau site d’alimentation avec une probabilitéqr PP −= 1 . La probabilité de plonger pour se
nourrir augmente avec l’abondance locale en poisson selon :
)(2
)(2
1 SQ
SQ
p i
i
e
eP −
−
+=
où Qi est l’abondance locale en poisson et S l’abondance pour laquelle cette probabilité vaut
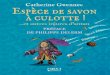
0,5, choisie égale à l’abondance moyenne de l’environnement (figure 3A).
Bilan énergétique – À chaque pas de temps, la dépense énergétique des femelles est
calculée en fonction de leur activité : déplacement ou plongées en mer, présence ou
allaitement à terre. Le bilan énergétique d’une otarie se déplaçant en mer est le suivant :
)1(1 mertt PEE −= −
où le niveau énergétique Et d’une otarie au temps t est exprimé en fonction de son niveau
d’énergie Et-1 au temps précédent et de la puissance spécifique Pmer consommée en mer par
Allaitement du jeune
Réserves suffisantes ?
Départ en mer
Approche de l’île
Se déplace
Présence sur l’île ?
Recherche un nouveau site d’alimentation ?
Effectue le voyage retour ?
Plonge et se nourrit
Fin du pas de temps
Début du pas de temps
oui oui
oui
oui
Fin de la simulation
Bilan énergétique
Période d’élevage terminée ?
Début de la simulation
oui
Allaitement du jeune
Réserves suffisantes ?
Départ en mer
Approche de l’île
Se déplace
Présence sur l’île ?
Recherche un nouveau site d’alimentation ?
Effectue le voyage retour ?
Plonge et se nourrit
Fin du pas de temps
Début du pas de temps
oui oui
oui
oui
Fin de la simulation
Bilan énergétique
Période d’élevage terminée ?
Début de la simulation
oui
Figure 2. Diagramme de flux du modèle indiquant le déroulement de la simulation et le détail
des décisions prises au cours d’un pas de temps.

10
pas de temps. Le gain énergétique des femelles s’alimentant est directement proportionnel à
l’abondance locale en ressource alimentaire Qi. Le bilan énergétique devient :
igainmertt QCPEE ×+−= − )1(1
Un terme de gain énergétique est alors ajouté, correspondant au produit de l’abondance locale
en ressource Qi, indice de quantité et de la valeur énergétique des proies, par un coefficient de
gain Cgain qui incorpore le taux net d’assimilation des proies. Pour une otarie allaitant son
jeune à terre, le bilan énergétique s’écrit :
laitterrett EPEE −−= − )1(1
Dans cette équation, la puissance spécifique Pterre consommée à terre et la quantité maximale
d’énergie Elait transformable en lait par pas de temps sont prises en compte. En phase de
jeûne, la perte de masse spécifique des jeunes otaries est constante (Beauplet et al. 2003). La
perte de masse des jeunes à chaque pas de temps représente donc une proportion constante de
leur masse qui correspond à leur métabolisme de maintien. Le bilan en terme de masse
s’écrit :
)1(1 jeunett DMM −= −
où la masse Mt d’un jeune au temps t est exprimée en fonction de sa masse Mt-1 au temps
précédent et de la perte de masse spécifique Djeune par pas de temps à terre. Au cours de
l’allaitement, l’énergie maternelle est transformée en lait avec un rendement Clait et convertie
en masse par le jeune avec un coefficient d’assimilation Ca. Le bilan devient donc :
laitalaitjeunett CCEDMM ××+−= − )1(1
0 1 2 3 4 5 6
0.0
0.2
0.4
0.6
0.8
1.0
Abondance locale
Pro
babi
lité
de s
e no
urrir
A
-4 -2 0 2 4
0
45
90
135
180
Variation d'abondance locale
Cha
ngem
ent a
ngul
aire
moy
en
B
0 1 2 3 4 5 6
0
45
90
Abondance locale
Eca
rt-t
ype
du c
hang
emen
t ang
ulai
re
C
Figure 3. Fonctions utilisées dans le modèle. (A) Probabilité pour une femelle de plonger
pour se nourrir en fonction de l’abondance locale en ressource. (B) Changement angulaire
moyen en fonction de la variation d’abondance entre deux pas de temps successifs. (C)
écart-type du changement angulaire en fonction de l’abondance locale en ressource. Pour
(A) et (C), l’abondance moyenne de l’environnement est égale à 3 unités de ressource par
cellule.

11
Dans le modèle, la mortalité est liée uniquement à l’épuisement total des réserves
énergétiques : à la fin de chaque pas de temps, la survie des femelles et des jeunes est vérifiée
par comparaison respective de leurs réserves énergétiques et de leur masse avec les seuils
minimums. Les individus passant sous ce seuil sont considérés comme morts. Les paramètres
énergétiques utilisés dans le modèle proviennent d’études métaboliques réalisées sur le terrain
par des techniques de respirométrie ou l’utilisation d’eau doublement marquée (tableau 1).
Modes de déplacement
À chaque pas de temps, le déplacement des individus est défini par la distance
parcourue ainsi que par le changement de direction du mouvement par rapport à la direction
du mouvement précédent, caractérisé par un angle entre 0° et 360° (Turchin 1998). Ici, on
s’intéresse seulement à la variation du changement angulaire. La distance parcourue par unité
de temps est constante et correspond à une vitesse moyenne de 1,4 m.s-1 dans les différents
modes de déplacement considérés. Cette valeur correspond à la vitesse de nage moyenne au
cours des phases de déplacement d’un trajet alimentaire, mesurée sur des otaries équipées
d’enregistreurs de vitesse (Bonadonna et al. 2000).
Marche à direction aléatoire – Ce mode de déplacement implique que la direction de
chaque mouvement élémentaire est indépendante de la direction du précédent (Turchin 1998).
Ainsi, à chaque déplacement, le changement de direction du mouvement est tiré aléatoirement
d’une loi uniforme entre 0° et 360°.
Marche aléatoire corrélée – Ce mode de déplacement prend en compte la capacité des
individus à adapter leur comportement en fonction de leur environnement, et en particulier de
l’abondance en ressource (Turchin 1998). À chaque déplacement, le changement de direction
du mouvement est tiré aléatoirement d’une loi normale circulaire dont l’espérance ϕm et
l’écart-type ϕσ dépendent de l’abondance locale en ressource alimentaire. La moyenne ϕm du
changement angulaire est définie par la fonction suivante :
90))1(10arctan( ++×−= Qm δϕ
qui tend asymptotiquement vers 0° lorsque la différence d’abondance δQ entre deux positions
successives est positive (mouvement rectiligne), et vers 180° lorsqu’elle est fortement
négative (demi-tour) (figure 3B). Elle permet de simuler l’aptitude des individus à se diriger
localement vers les maximums en ressource. L’écart-type ϕσ du changement angulaire est
défini par la fonction suivante :
2
90)arctan( +−=
SQiσϕ

12
qui tend asymptotiquement vers 0° lorsque l’abondance locale en ressource Qi est très
inférieure à l’abondance moyenne de l’environnement S et vers 90° quand elle lui est très
supérieure (figure 3C). Elle modélise donc l’augmentation de la sinuosité des trajectoires
observée lorsque la ressource est abondante.
Éloignement de la colonie – Les prédateurs opérant à partir d’une place centrale
réussissent généralement à revenir à la colonie au cours de la saison de reproduction. Afin de
prendre en compte cette tendance à ne pas s’en éloigner excessivement, et le fait qu’un
individu s’approvisionnant à un site trop éloigné a un bilan énergétique nul à son retour, une
modification des règles de mouvement au-delà d’une distance limite dl est introduite. Elle
consiste à intégrer à la direction de tout individu situé au-delà de cette limite une composante
dirigée vers la colonie. Cette tendance est définie par la fonction suivante :
)( 1−−+= tcoltt ϕϕαϕϕ
où la direction ϕt de l’individu au temps t est corrigée par une fraction α de la différence entre
la direction de l’individu ϕt-1 au temps précédent et celle de la colonie ϕcol. Cette fraction est
nulle lorsque la distance de l’animal à la colonie est inférieure à la distance limite dl puis croît
linéairement jusqu’à 1 lorsque la distance atteint une distance maximale dmax. Cette correction
se justifie compte tenu des observations
Mémorisation
L’analyse des trajets en mer successifs d’une même otarie montre qu’il existe une
fidélité importante dans la fréquentation des zones de nourrissage (Bonadonna et al. 2001).
Ces résultats laissent supposer l’existence d’une mémorisation individuelle des sites de pêche
profitables. Une possibilité de mémoriser le meilleur site de pêche rencontré a donc été
introduite dans le modèle. Pour ces stratégies comportementales, un voyage de 20 jours
préalable à la saison de reproduction est simulé, au cours duquel la balance énergétique des
individus n’est pas activée. Les femelles mémorisent alors la position de la cellule rencontrée
possédant l’abondance en ressource la plus élevée. Ce site mémorisé peut changer au cours de
la simulation si une cellule d’abondance supérieure est traversée. Après retour à la colonie, la
direction de départ en mer prise par une otarie est tirée aléatoirement d’une loi normale ayant
pour espérance la direction du site favorable retenu et pour écart-type 15°. Le déplacement est
alors rectiligne jusqu’au premier événement de pêche ou jusqu’à ce que le site mémorisé soit
atteint.

13
Tableau 1. Paramètres du modèle.
Paramètre Valeur Unité Source Jeune Masse à la naissance Minit 6 kg (Costa and Trillmich 1988) Perte de masse quotidienne 3 % (Guinet et al. 2000) Masse minimale 4 kg Femelle Masse initiale 35 kg (Costa and Trillmich 1988) Contenu énergétique 10 MJ.kg-1 (Arnould et al. 1996b) Taux métabolique à terre 3 W.kg-1 (Arnould et al. 1996c) Taux métabolique en mer 6 W.kg-1 (Arnould et al. 1996c) Énergie minimale 70 % Énergie maximale 130 % Allaitement Énergie transférée 2 MJ.h-1 (Arnould et al. 1996a) Rendement de conversion Clait 80 % (Boyd 1999) Coefficient d’assimilation Ca 0,128 kg.J-1 (Boyd 1999) Voyages en mer Durée maximale 10 j (Bonadonna et al. 2000) Distance limite dl 300 km (Bonadonna et al. 2000) Vitesse de nage 1,4 m.s-1 (Bonadonna et al. 2000) Écart-type de la direction de départ 15 ° (Bonadonna et al. 2001) Coefficient de gain Cgain 1 MJ.u-1 Simulation Durée 120 j Pas de temps 2 h
Sorties du modèle
À l’issue d’une simulation couvrant la saison de reproduction, les taux de survie des
femelles et des jeunes au cours de l’élevage, le taux de croissance des jeunes ainsi que la
durée et la distance des voyages en mer sont obtenus. Le taux de survie des femelles est égal
au rapport du nombre de femelles vivantes à la fin de la simulation sur le nombre initial de
femelles. Le taux de survie des jeunes est égal au nombre de jeunes vivants à la fin de la
simulation sur le nombre initial de jeunes, il constitue le succès reproducteur des femelles. Le
taux de croissance des jeunes donne une indication de leur probabilité de survie après le
sevrage (Beauplet et al. 2005). Ces deux valeurs permettent donc d’évaluer la valeur sélective
d’une femelle donnée, c’est-à-dire sa capacité à élever un jeune capable de survivre et
potentiellement de se reproduire ultérieurement.

14
Simulations effectuées
Chaque résultat est la moyenne de 100 simulations de 100 couples femelle-jeune
effectuées pour des valeurs identiques de paramètres. Pour chaque carte, quatre modes de
déplacement ont été testés : marche à direction aléatoire et marche aléatoire corrélée, avec et
sans mémorisation du meilleur site de pêche rencontré. Le tableau 2 présente le détail des
paramètres des différents scénarios.
Les effets de l’abondance et de l’agrégation de la ressource ont été testés
simultanément dans le scénario ABAG : d’une part l’abondance totale du milieu a varié de
4 000 (milieu pauvre) à 12 000 (milieu riche) unités de ressource (par pas de 1 000), et d’autre
part la portée de l’agrégation de la ressource a varié de 0 (milieu aléatoire) à 10 (milieu très
agrégé). L’effet de l’éloignement de la ressource a été testé dans le scénario DIST en faisant
varier la distance minimale de la ressource de 5 (proche) à 15 (éloigné) cellules. Enfin,
l’influence de la prédictibilité des ressources a été évaluée dans le scénario PRED où la
fréquence des changements locaux d’abondance variait de 0 à 4 par jour.
Tableau 2. Modalités des différents scénarios testés.
Scénario Abondance Agrégation Distance minimale Prédictibilité (× 1 000 unités) (portée) (cellules) (changements.j-1)
ABAG 4 à 12 0 à 10 5 0 DIST 4-8-12 0 à 10 5-10-15 0 PRED 4-8-12 0 à 10 5 0-1-2-3-4
Analyses de sensibilité
Les analyses de sensibilité du modèle à des paramètres sur la valeur desquels existe
une incertitude ou une marge d’erreur, et concernant en particulier le métabolisme
énergétique, ont été effectuées pour le mode de déplacement le plus efficace et dans des
conditions d’abondance totale et d’agrégation de la ressource moyennes. L’effet d’une
augmentation et d’une diminution de 15 % de la valeur des paramètres sur la survie des jeunes
et sur la survie des femelles a été observé.

15
Résultats
Balance énergétique et variation de masse
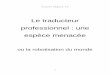
Une simulation typique de la balance énergétique d’une otarie femelle et l’évolution
de la masse de son jeune au cours des 120 jours de la saison d’élevage sont représentées sur la
Figure 4. Le niveau énergétique de la femelle (Figure 4A) est caractérisé par des cycles dont
les éléments correspondent aux différentes phases d’activité de l’animal (Figure 4C). Après le
départ de l’île, la diminution lente des réserves énergétiques correspond aux dépenses liées au
trajet aller vers le site d’alimentation. L’augmentation qui suit signale la reconstitution des
réserves corporelles lorsque la femelle s’alimente en mer ; sa pente est une indication de
l’abondance en ressource au site choisi. Elle est suivie d’une lente diminution des réserves
correspondant aux dépenses effectuées lors du trajet retour vers la colonie. Enfin, le cycle se
Figure 4. Évolution de (A) la balance énergétique d’une femelle et de (B) la masse de son
jeune au cours des 120 jours de la période d’élevage. Les droites horizontales continues
indiquent les valeurs initiales d’énergie et de masse, les droites interrompues représentent
les seuils minimums (énergie et masse) et maximum (énergie). (C) Détail des différentes
phases au cours d’un voyage en mer : a-voyage aller vers le site d’alimentation, b-pêche,
c-voyage retour vers la colonie, d-allaitement.
250
300
350
400
450
Ene
rgie
de
la fe
mel
le (M
J) A
0 20 40 60 80 100 120
4
6
8
10
Nombre de jours
Mas
se d
u je
une
(kg)
B
C
a b c d

16
termine par le transfert rapide des réserves énergétiques de la femelle vers son jeune au cours
de l’allaitement. L’évolution de la masse du jeune est constituée d’une alternance
d’augmentations et de diminutions (Figure 4B). Elle décroît de manière continue lors du
voyage en mer de la femelle et augmente de manière rapide lors de l’allaitement (Figure 4C).
La tendance asymptotique de la croissance du jeune s’explique par l’augmentation du coût
absolu de maintien avec la masse, alors que les apports maternels au cours du temps restent
relativement constants.
Trajets simulés
L’observation des trajets simulés permet de déterminer des différences qualitatives
entre les différentes stratégies de déplacement (Figure 5). La principale caractéristique des
trajets effectués en marche aléatoire est la présence de nombreux changements directionnels
et la quasi-absence de segments linéaires, à l’exception des voyages de retour vers la colonie
(Figure 5A). En marche aléatoire corrélée, les trajets se composent de phases de mouvement
directionnel, correspondant aux voyages au départ et à l’arrivée de la colonie, et de phases où
les changements directionnels sont plus fréquents et probablement reliés à la fréquentation des
sites de pêche (Figure 5B). Enfin, l’effet de la mémorisation du meilleur site de pêche
rencontré s’accompagne d’une fidélité directionnelle des trajets successifs d’un individu
(Figure 5C).
A B C
Figure 5. Exemples de trajets typiques simulés sous trois stratégies de déplacement : (A)
marche aléatoire, (B) marche aléatoire corrélée et (C) marche aléatoire corrélée avec
mémorisation. Le cercle représente la position de la colonie.

17
Survie des femelles
L’agrégation et l’abondance de la distribution spatiale de la ressource, ainsi que le
mode de déplacement, ont un effet marqué sur le taux de survie des femelles (scénario
ABAG, Figure 6). En marche aléatoire, le taux de survie des femelles est nul pour toutes les
valeurs d’abondance et d’agrégation de la ressource. En marche aléatoire avec mémoire, il
décroît rapidement avec l’augmentation de l’agrégation pour les différents niveaux
d’abondance (Figure 6A, B, C, lignes continues). Pour un même niveau d’agrégation, la
survie des femelles augmente lentement avec l’augmentation de l’abondance. En marche
aléatoire corrélée, le taux de survie des femelles décroît lentement avec l’augmentation de
l’agrégation au-delà d’un seuil (Figure 6A, B, C, lignes interrompues). Pour un même niveau
d’agrégation, il décroît lorsque l’abondance diminue, d’autant plus rapidement que
l’agrégation est élevée. La marche aléatoire corrélée avec mémoire produit un résultat
similaire quoique la valeur du taux de survie des femelles soit toujours supérieure (Figure 6A,
B, C, pointillés).
Survie des jeunes
L’agrégation spatiale et l’abondance totale de la ressource alimentaire, ainsi que le
mode de déplacement, ont un effet marqué sur le taux de survie des jeunes (scénario ABAG,
Figure 7). En marche aléatoire, le taux de survie des jeunes est nul pour toutes les valeurs
d’abondance et d’agrégation de la ressource. En marche aléatoire avec mémoire, il décroît
rapidement avec l’augmentation de l’agrégation (Figure 7A, B, C, lignes continues). Pour un
Figure 6. Taux de survie des femelles en fonction de l’agrégation spatiale de la ressource et
du mode de déplacement, pour différentes valeurs d’abondance totale de la ressource : (A)
Abondance basse (4 000 unités de ressource) (B) Abondance moyenne (8 000 unités de
ressource) (C) Abondance élevée (12 000 unités de ressource).
0 2 4 6 8 10
0.0
0.2
0.4
0.6
0.8
1.0
Agrégation
Sur
vie
des
fem
elle
s
A
0 2 4 6 8 10
Agrégation
B
aléatoire corréléeavec mémoirealéatoire corréléealéatoire avec mémoire
0 2 4 6 8 10
Agrégation
C

18
même niveau d’agrégation, la survie juvénile augmente lentement avec l’augmentation de
l’abondance. En marche aléatoire corrélée, le taux de survie des jeunes est maximal pour un
faible niveau d’agrégation, correspondant à une portée égale à 2 cellules (Figure 7A, B, C,
lignes interrompues). Il augmente avec l’augmentation de l’abondance. La marche aléatoire
corrélée avec mémoire produit un résultat similaire (Figure 7A, B, C, pointillés) quoique le
maximum de survie juvénile intervienne pour un niveau d’agrégation inférieur, correspondant
à une portée d’une seule cellule.
Taux de croissance juvénile
L’agrégation spatiale de la ressource, ainsi que le mode de déplacement, ont un effet
marqué sur le taux de croissance des jeunes (scénario ABAG, Figure 8). En marche aléatoire
Figure 7. Taux de survie des jeunes en fonction de l’agrégation spatiale de la ressource et
du mode de déplacement, pour différentes valeurs d’abondance totale de la ressource : (A)
Abondance basse (4 000 unités de ressource) (B) Abondance moyenne (8 000 unités de
ressource) (C) Abondance élevée (12 000 unités de ressource).
Figure 8. Taux de croissance (g.j-1) des jeunes en fonction de l’agrégation spatiale de la
ressource et du mode de déplacement, pour différentes valeurs d’abondance totale de la
ressource : (A) Abondance basse (4 000 unités de ressource) (B) Abondance moyenne
(8 000 unités de ressource) (C) Abondance élevée (12 000 unités de ressource).
0 2 4 6 8 10
0.0
0.2
0.4
0.6
0.8
1.0
Agrégation
Sur
vie
juvé
nile
A
0 2 4 6 8 10
Agrégation
B
0 2 4 6 8 10
Agrégation
C
aléatoire corréléeavec mémoirealéatoire corréléealéatoire avec mémoire
0 2 4 6 8 10
0
20
40
60
Agrégation
Tau
x de
cro
issa
nce
(g/jo
ur)
A
0 2 4 6 8 10
Agrégation
B
aléatoire corréléeavec mémoirealéatoire corréléealéatoire avec mémoire
0 2 4 6 8 10
Agrégation
C

19
avec mémoire, le taux de croissance juvénile est d’environ 40g.j-1 pour une distribution
aléatoire d’une ressource moyennement abondante. Il décroît rapidement avec l’augmentation
de l’agrégation et devient négatif quand la portée dépasse 2 cellules (Figure 8B, ligne
continue). En marche aléatoire corrélée, le taux de croissance des jeunes est maximal à
40 g.j-1 pour une faible agrégation et une abondance moyenne. Il diminue lorsque l’agrégation
augmente et devient négatif quand la portée dépasse 5 (Figure 8B, ligne interrompue). En
marche aléatoire corrélée avec mémoire, le taux de croissance des jeunes est maximal à
50 g.j-1 pour une très faible agrégation et une abondance moyenne. Il diminue lorsque
l’agrégation augmente mais conserve des valeurs positives (Figure 8, pointillés). Comme
attendu, pour les trois modes de déplacement, le taux de croissance juvénile est diminué
lorsque l’abondance totale de la ressource est élevée et augmenté lorsqu’elle est faible (Figure
8A et C).
Durée et distance totale des trajets en mer
L’agrégation spatiale et l’abondance totale de la ressource ont un effet marqué sur la
durée moyenne des trajets en mer, ainsi que sur la distance totale moyenne parcourue par les
femelles lors de l’approvisionnement à partir de la colonie. La durée et la longueur des
parcours augmentent avec le niveau d’agrégation mais diminuent lorsque l’abondance est
augmentée. Pour une abondance et une agrégation de la ressource fixées, la marche aléatoire
corrélée se traduit par des trajets plus courts et plus brefs que la marche aléatoire.
Effet de la distance
L’éloignement de la ressource par rapport à la colonie (scénario DIST), simulé par
l’augmentation du rayon de la zone centrale sans ressource, a un impact négatif sur le taux de
survie des jeunes (Figure 9A). Cette tendance est vérifiée pour toutes les stratégies de
déplacement, ainsi que pour toutes les valeurs d’abondance et d’agrégation de la ressource
testées. Par ailleurs, le taux de survie des femelles et le taux de croissance juvénile suivent
également la même tendance. À l’inverse, la durée et la longueur des trajets en mer
s’allongent de manière sensible avec l’augmentation de l’éloignement de la ressource
(données non montrées).
Effet de la prédictibilité
La diminution de la prédictibilité de la ressource (scénario PRED), simulée par
l’augmentation de la fréquence des modifications de l’abondance locale, a un impact négatif
sur le taux de survie des jeunes (Figure 9B). Cette tendance est vérifiée pour toutes les

20
stratégies de déplacement, ainsi que pour toutes les valeurs d’abondance et d’agrégation de la
ressource testées. Par ailleurs, le taux de survie des femelles et le taux de croissance juvénile
suivent également la même tendance. Inversement, la durée et la longueur des trajets en mer
s’allongent légèrement avec la hausse du nombre de variations quotidiennes de l’abondance
locale de la ressource (données non montrées).
6 0 8 0 1 0 0 1 2 0 1 4 0
0 .0
0 .2
0 .4
0 .6
0 .8
1 .0
D is ta nc e (k m )
Sur
vie
juvé
nile
A
0 1 2 3 4
0 .0
0 .2
0 .4
0 .6
0 .8
1 .0
N o m b re d e va ria tio ns q uo tid ie nne s
Sur
vie
juvé
nile
B
a lé a to i re c o rré lé ea ve c m é m o i rea lé a to i re c o rré lé ea lé a to i re a ve c m é m o i re
Figure 9. Taux de survie des jeunes en fonction (A) du rayon de la zone sans ressources
autour de la colonie, et (B) du nombre de variations quotidiennes de l’abondance locale de la
ressource alimentaire (Abondance : 8 000 unités de ressource, Agrégation : 1)
Analyses de sensibilité du modèle
Les effets de la variation de différents paramètres énergétiques et comportementaux
sur la survie des femelles et celle des jeunes sont présentés dans le Tableau 3. Par souci de
simplicité d’interprétation, en raison du nombre de stratégies de déplacement et de l’étendue
de la gamme des valeurs d’abondance totale et d’agrégation spatiale de la ressource, ces tests
n’ont été réalisés que pour un scénario déterminé. La marche aléatoire corrélée avec mémoire,
qui constitue le mode de déplacement permettant généralement les meilleures performances
de croissance a été choisie. Pour la ressource, une abondance totale moyenne et un niveau
d’agrégation moyen ont été utilisés. Quand tous les autres paramètres sont conservés
constants, l’augmentation du métabolisme de maintien des jeunes, donc du pourcentage
quotidien de masse perdue, a un effet négatif sur leur survie mais pas d’effet sur celle des
femelles. L’augmentation du taux métabolique des femelles en mer a un effet négatif sur la
survie des femelles et des jeunes, mais l’augmentation du métabolisme des femelles à terre
ainsi que l’augmentation de la durée au-delà de laquelle elles retournent à terre n’affectent

21
que la survie juvénile. Enfin, l’augmentation de la vitesse de nage des femelles, sans autre
modification de paramètres, a un effet positif sur les taux de survie des jeunes et des femelles.
Tableau 3. Analyse de sensibilité du modèle à la variation de différents paramètres.
Résultats présentés sous la forme de différences de survie moyenne entre le modèle par
défaut et le même modèle pour lequel la valeur d’un unique paramètre est modifiée.
Paramètre Variation du paramètre (%)
Variation de la survie des femelles (%)
Variation de la survie des jeunes (%)
Jeune Perte de masse quotidienne + 15 0 − 13 − 15 0 + 6 Femelle Taux métabolique en mer + 15 − 10 − 10 − 15 + 1 + 3 Taux métabolique à terre + 15 0 − 5 − 15 0 + 5 Voyages en mer Durée maximale + 15 0 − 6 − 15 0 + 6 Vitesse de nage + 15 + 2 + 7 − 15 − 8 − 9
Confrontation aux données réelles
L’existence d’études portant sur la survie et la croissance des jeunes ainsi que sur la
durée et la distance des voyages en mer des femelles permet de comparer les différentes
sorties du modèle (scénario ABAG) : les survies des jeunes et des femelles, le taux de
croissance des jeunes, la durée et la longueur des trajets en mer et la durée des séjours à terre,
à des données mesurées sur le terrain (Tableau 4). Il existe des valeurs d’abondance et
d’agrégation pour lesquelles les sorties du modèle coïncident avec la gamme des données
observées, pour chacun des modes de déplacement à l’exception de la marche aléatoire sans
mémoire. Les paramètres d’abondance et d’agrégation qui permettent aux données simulées
de correspondre aux données observées peuvent être représentés graphiquement (Figure 10).
Cette représentation indique que l’ensemble des sorties du modèle tombe dans la gamme des
données observées lorsque les paramètres sont choisis de façon à ce que le point de
coordonnées (agrégation, abondance) soit à l’intérieur de la région délimitée propre à chaque
mode de déplacement.
La marche aléatoire ne recoupe les données réelles que pour une distribution aléatoire
de la ressource (agrégation nulle) et une abondance moyenne à élevée. En marche aléatoire
corrélée, le recouvrement obtenu est plus important et couvre des niveaux d’agrégation plus

22
élevés ainsi que des niveaux d’abondance plus faibles. La marche aléatoire corrélée avec
mémoire élargit peu les valeurs d’abondance et d’agrégation pour lesquelles les données
simulées coïncident avec les données réelles.
Tableau 4. Données empiriques.
Paramètre Valeur Source Survie adulte > 98 % (Beauplet et al. 2005) Survie juvénile 50-90 % (Reid and Forcada 2005) Taux de croissance 40-90 g.j-1 (McCafferty et al. 1998) Durée d’un voyage en mer 5-10 j (Bonadonna et al. 2000) Distance parcourue en mer 100-700 km (Bonadonna et al. 2000) Durée d’un séjour à terre 1-3 j (Boyd 1999)
0 2 4 6 8 10
4000
6000
8000
10000
12000
Agrégation
Abo
ndan
ce
Figure 10. Valeurs des paramètres d’abondance totale et d’agrégation spatiale de
la ressource pour lesquelles les sorties du modèle correspondent aux gammes de
données observées (voir texte pour détails).
aléatoire avec mémoire
aléatoire corrélée
aléatoire corrélée avec mémoire

23
Discussion
Les variations de la masse des jeunes otaries ainsi que leur taux de survie et celui des
femelles, la durée et la longueur des trajets d’alimentation en mer sont des propriétés
émergentes issues des processus comportementaux, énergétiques et physiologiques simulés
dans le modèle. L’abondance et la distribution de la ressource ainsi que la stratégie de
déplacement ont un effet majeur sur la capacité des femelles à élever leur jeune jusqu’au
sevrage. À l’exception d’une étude modélisant le bilan énergétique d’élans se nourrissant
dans un environnement défini explicitement (Moen et al. 1997), peu de modèles semblent
avoir intégré simultanément les variations d’abondance de la ressource, les stratégies de
recherche et leurs conséquences au niveau énergétique.
Effet des différents modes de déplacement
Cette étude permet de mettre en évidence des différences au niveau de l’acquisition de
la ressource alimentaire selon le mode de déplacement retenu.
Marche aléatoire – La marche aléatoire ne permet en aucun cas la survie des femelles.
Un tel mode de déplacement stochastique, assimilé à un mouvement brownien1 ou à de la
diffusion simple (Turchin 1998), ne prend en compte ni mémoire à long terme ni influence
immédiate de l’environnement sur le comportement. À ce titre, il s’agit d’un modèle trop
simple pour être biologiquement intéressant. Dans une marche aléatoire, la distance moyenne
parcourue depuis la place centrale augmente de manière proportionnelle à la racine carrée du
temps. En l’absence de ressources à proximité immédiate de la colonie, comme c’est le cas
dans les simulations réalisées, il apparaît que ce mode de déplacement ne permet pas aux
femelles d’accéder aux sites de pêche avant d’avoir épuisé la totalité de leurs réserves
énergétiques. Une solution consiste à imaginer un déplacement linéaire jusqu’au site de
pêche, puis une marche aléatoire à partir de celui-ci : c’est l’objet de la marche aléatoire avec
mémoire.
Marche aléatoire avec mémoire – Ce mode de déplacement permet de différencier
deux phases au cours du voyage d’approvisionnement : une première phase de mouvement
linéaire pendant laquelle l’otarie se déplace en direction d’un site de pêche précédemment
visité, suivie d’une phase de prospection suivant les règles d’une marche aléatoire. Le seul
type d’environnement dans lequel des otaries réussissent à survivre et à élever leur jeune est
1 Le mouvement brownien est le mouvement aléatoire d’une grosse particule en suspension
dans un fluide.

24
celui où la ressource est distribuée de façon aléatoire (agrégation nulle). Dès que le niveau
d’agrégation de la ressource augmente, même de façon minime, la mortalité des femelles et
des jeunes augmente de façon dramatique. En effet, dans un environnement structuré de
façon aléatoire, la ressource est répartie de façon globalement homogène et la probabilité pour
un prédateur se déplaçant aléatoirement d’en trouver est élevée. En revanche, dans un
environnement spatialement agrégé, il existe des régions dépourvues de ressource dans
lesquelles un tel prédateur risque de prospecter sans aucun succès.
Marche aléatoire corrélée – La marche aléatoire corrélée utilisée dans les simulations
implique l’existence d’une mémoire à court terme. Le prédateur est alors capable d’utiliser
des indices environnementaux (ici, la variation de l’abondance locale en proies entre les deux
derniers pas de temps, et la valeur absolue de l’abondance locale actuelle) pour adapter son
déplacement aux variations de ressources rencontrées, et donc à sa réussite de chasse. Il peut
ainsi conserver une direction si l’abondance en ressource augmente, faire demi-tour si elle
diminue, et augmenter la sinuosité de sa trajectoire si l’abondance locale en proies est élevée.
Avec un tel mode de déplacement, le taux de survie des femelles et des jeunes est élevé pour
une large gamme de niveau d’agrégation des ressources. Cependant, on observe que la gamme
des valeurs maximales de survie correspond à une ressource faiblement agrégée, une
augmentation de l’agrégation s’accompagnant d’une mortalité adulte et juvénile en hausse.
Marche aléatoire corrélée avec mémoire – La marche aléatoire corrélée avec mémoire
est basée sur l’existence de deux niveaux de mémoire : une mémoire à long terme permettant
aux otaries de retrouver la région d’un site de pêche connu, et une mémoire à court terme leur
permettant d’adapter leur mouvement à l’échelle locale en fonction de l’abondance en
ressource. Avec ce mode de déplacement, le taux de survie des femelles et celui des jeunes
varient de manière similaire à la marche aléatoire corrélée sans mémoire. Il apparaît donc que
dans un milieu isotrope où la ressource, même agrégée, est distribuée de manière identique
dans toutes les directions autour de la colonie, la mémoire n’apporte qu’un léger bénéfice en
terme de survie. En revanche, dans un milieu anisotrope1, les otaries possédant une mémoire
seraient certainement favorisées en prenant préférentiellement au départ de la colonie la
direction des sites de pêche. Par ailleurs, l’évidence d’une fidélité individuelle et collective à
des régions de pêche préférées (Bonadonna et al. 2001) laisse supposer l’existence de cette
mémorisation.
1 Un milieu anisotrope est un milieu dont les propriétés varient selon les directions.

25
Trajectoires – L’aspect des trajets en mer des otaries est variable selon le mode de
déplacement. La marche aléatoire induit des trajectoires erratiques qui ne ressemblent pas aux
parcours d’otaries équipées de balises Argos (Bonadonna et al. 2000). En revanche, la marche
aléatoire corrélée se traduit par des trajectoires où des phases linéaires, correspondant
probablement aux déplacements entre la colonie et les sites de pêche, ainsi qu’à ceux entre
différents sites de pêche, alternent avec des portions de sinuosité élevée correspondant
probablement à la fréquentation des sites de pêche. Ce type de trajets est assez semblable aux
parcours observés de prédateurs qui adaptent leur mouvement à l’abondance locale en
ressource alimentaire (Fauchald and Tveraa 2003). Il semble donc vraisemblable que les
otaries adaptent leur déplacement sur la base d’indices de l’abondance locale en ressource
alimentaire.
Effet de l’abondance locale de la ressource
Effet de l’abondance globale – Conformément aux prédictions formulées, il apparaît
que l’augmentation de l’abondance en ressource s’accompagne d’un meilleur succès
reproducteur. En marche aléatoire, le succès reproducteur n’est élevé que pour une abondance
forte, alors qu’en marche aléatoire corrélée les otaries peuvent se contenter d’une abondance
moyenne. Ce résultat n’est pas inattendu, mais il montre qu’avec un mode de déplacement
simple prenant en compte des indices environnementaux, les femelles peuvent maintenir une
survie élevée pour une gamme d’abondance relativement importante. En revanche, le succès
reproducteur est beaucoup plus sensible aux variations de richesse du milieu. La diminution
de l’abondance entraîne également un allongement de la distance et de la durée des trajets en
mer des femelles, ce qui concorde avec des voyages de plus longue durée observés en Géorgie
du Sud lors d’une année où l’abondance en proies était faible (Boyd et al. 1994).
Effet de l’agrégation spatiale – L’effet de l’agrégation de la ressource sur le succès
reproducteur des femelles est très différent selon le mode de déplacement. Le résultat obtenu
en marche aléatoire est attendu : seule une distribution aléatoire des ressources (agrégation
nulle) est compatible avec la survie du jeune. En marche aléatoire corrélée avec ou sans
mémoire, la stratégie d’approvisionnement des otaries leur confère une survie maximale pour
un faible niveau d’agrégation. Cette observation n’était pas évidente à prévoir puisqu’on
pouvait s’attendre à ce qu’une agrégation élevée de la ressource favorise les otaries adaptant
leur déplacement à l’abondance de la ressource, et que ce phénomène soit accentué chez les
individus capables de mémoriser un site de pêche. En augmentant le niveau d’agrégation, on
élève localement la densité en proies mais on étend également la surface des zones

26
dépourvues de ressource. Un prédateur évoluant dans le milieu peut alors parcourir de longues
distances sans rencontrer de ressource. D’autres modèles d’approvisionnement ont également
montré que l’efficacité de la recherche alimentaire diminue au-delà d’un certain niveau
d’agrégation de la ressource, comme celui où un prédateur s’alimente dans un système de
patches imbriqués (Fauchald 1999).
Effet de l’accessibilité – L’étude des sites de pêche fréquentés par les otaries autour
des Îles Kerguelen a montré qu’elles se nourrissaient essentiellement au-delà du plateau péri-
insulaire, à plus de 50 km de la colonie (Bonadonna et al. 2001). Il est donc admis que les
proies dont se nourrissent ces prédateurs sont localisées au-delà d’une distance minimale à
parcourir. L’augmentation virtuelle de cette distance a un impact négatif important sur le taux
de survie juvénile.
Effet de la prédictibilité – La distribution de la ressource varie au cours du temps ;
c’est-à-dire qu’un site d’alimentation favorable à un moment donné peut ne plus l’être après
un temps déterminé en raison du déplacement ou de l’épuisement local de la ressource. Dans
le modèle, la variation temporelle de la distribution de la ressource a été modélisée par une
dérive à vitesse et direction constantes. La prédictibilité de la ressource est d’autant plus faible
que la vitesse de dérive, choisie dans une gamme des valeurs du Courant Circumpolaire
antarctique dans la région de Kerguelen (Park et al. 1991), est élevée. La diminution de la
prédictibilité entraîne une diminution importante du succès reproducteur des otaries.
Cependant, cette façon de simuler la baisse de la prédictibilité a ses limites : les proies des
otaries sont des poissons, capables de nager et ne subissant pas passivement l’action des
courants marins. La variation temporelle de leur distribution est plus probablement liée aux
variations des conditions environnementales (température de l’eau, productivité primaire) au
cours de l’année. Par ailleurs, la consommation importante de myctophidae par les prédateurs
marins supérieurs (Guinet et al. 1996) peut également avoir un impact direct sur la
distribution de la ressource par épuisement local lié à l’exploitation. Cependant, la
consommation de myctophidae par les otaries autour de Kerguelen ne représente qu’une petite
fraction (1 %) de la consommation totale, qui est essentiellement le fait du manchot royal et
du gorfou macaroni (Guinet et al. 1996). De plus, les populations d’otaries de Kerguelen sont
actuellement en phase de recolonisation après les chasses intensives du 19ème siècle et le taux
de croissance annuel élevé (14 à 18 % ; C. Guinet, comm. pers.) ne laisse entrevoir aucun
phénomène de densité-dépendance. La prise en compte de l’épuisement de la ressource par la
prédation des otaries simulées ne semble donc pas être indispensable, ce qui justifie
l’approche considérée dans le modèle présenté.

27
Conclusion
La confrontation des résultats du modèle (survie, taux de croissance des jeunes,
longueur et durée des trajets en mer) à un ensemble d’observations expérimentales montre
qu’il existe une gamme de paramètres d’abondance et d’agrégation de la ressource pour
laquelle les valeurs simulées et les valeurs réelles coïncident. Cette gamme de paramètres est
plus étendue dans le cas des marches aléatoires corrélées que dans celui de la marche
aléatoire. Le modèle construit et paramétré pour l’otarie à fourrure antarctique semble donc
pouvoir être validé. Dans son principe, il s’agit cependant d’un modèle générique qui peut
facilement être utilisé pour d’autres prédateurs marins opérant à partir d’une place centrale,
comme le manchot royal (Charrassin and Bost 2001). Cette mise en œuvre nécessite
simplement l’intégration des paramètres énergétiques propres à l’espèce considérée. Par
ailleurs, le modèle peut également être transposé à un autre type d’approvisionnement à partir
d’une place centrale : celui de la plongée. Dans ce cas, le prédateur marin opère à partir de la
surface pour rejoindre les sites de prédation situés à une certaine profondeur, liée à des indices
environnementaux comme la thermocline (Charrassin and Bost 2001), et l’approvisionnement
en oxygène doit être considéré (Thompson and Fedak 2001). L’application du modèle à des
animaux terrestres est également envisageable ; des informations sur la distribution réelle de
la ressource alimentaire, non disponibles en milieu marin, pourraient alors être incorporées.
L’établissement d’un protocole expérimental où les paramètres de distribution de la ressource
sont entièrement contrôlés permettrait de tester de manière complète les résultats du modèle
dans différentes conditions.
Perspectives
Modélisation de la ressource – En absence d’informations précises sur la répartition
des proies des otaries dans la région de Kerguelen, leur distribution a du être simulée de
manière simple. La seule étude s’intéressant à cette distribution (Guinet et al. 2001) avait
permis d’observer un certain niveau d’agrégation des poissons inclus dans le régime
alimentaire des otaries. Leur abondance absolue, ainsi que la variation temporelle de cette
distribution n’a toutefois pas été déterminée. De telles campagnes de mesures nécessitent la
mise en place de moyens techniques lourds (navire océanographique) et leur répétition n’est
guère envisageable. Un moyen plus simple d’obtenir des informations sur la productivité
océanique est d’utiliser la mesure de la concentration marine en chlorophylle-a fournie par des
satellites (Antoine and Morel 1996). Cette estimation de la productivité primaire présente
toutefois quelques inconvénients : la concentration en chlorophylle-a n’est mesurée qu’en

28
surface et non dans l’ensemble de la colonne d’eau dans laquelle s’alimentent les prédateurs
des réseaux trophiques supérieurs, et dans la région des Îles Kerguelen la couverture nuageuse
interdit une résolution temporelle inférieure au mois. De plus, la productivité primaire ne
fournit qu’un indice relatif de l’abondance des niveaux trophiques supérieurs, un décalage
spatial et temporel pouvant exister dans la variation des différents niveaux de la chaîne
alimentaire. Malgré les limites énoncées, l’utilisation des données de productivité primaire
pour modéliser la distribution de la ressource alimentaire permettrait probablement de prendre
en compte de manière plus réaliste l’anisotropie et la variabilité temporelle de cette
distribution.
Variabilité phénotypique inter-individuelle – L’intérêt des modèles individu-centrés en
écologie réside dans la prise en compte explicite des différences inter-individuelles
(DeAngelis and Mooij 2005; Grimm and Railsback 2005). Dans notre modèle, des différences
comportementales ont été simulées par les différentes stratégies de déplacement, et la
modélisation explicite de la distribution de la ressource a permis d’incorporer une variabilité
dans l’environnement spatial de chaque individu. L’ajout d’une possibilité de mémorisation a
introduit des différences liées à l’apprentissage, chaque individu possédant sa propre
expérience.
D’autres sources de variabilité existent chez les otaries, en particulier une variabilité
de taille, qui se traduit par des différences dans la capacité de stockage d’énergie. Intégrer
cette variabilité au modèle permettrait de comparer la valeur sélective de femelles de
différentes tailles. La micro-évolution observée chez une espèce proche, l’otarie à fourrure
subantarctique Arctocephalus tropicalis (Authier 2007), et se traduisant par une augmentation
de la taille pourrait ainsi être étudiée. Le modèle permettrait d’évaluer l’influence de la
variabilité phénotypique de taille, en relation avec la structuration spatiale des ressources
alimentaires, sur la valeur sélective des individus.
Bibliographie
Antoine, D. and A. Morel. 1996. Oceanic primary production .1. Adaptation of a spectral light-
photosynthesis model in view of application to satellite chlorophyll observations. Global
Biogeochemical Cycles 10:43-55.
Arnould, J. P. Y., I. L. Boyd, and D. G. Socha. 1996a. Milk consumption and growth efficiency in
Antarctic fur seal (Arctocephalus gazella) pups. Canadian Journal of Zoology-Revue
Canadienne de Zoologie 74:254-266.

29
Arnould, J. P. Y., I. L. Boyd, and J. R. Speakman. 1996b. Measuring the body composition of
Antarctic fur seals (Arctocephalus gazella): Validation of hydrogen isotope dilution.
Physiological Zoology 69:93-116.
Arnould, J. P. Y., I. L. Boyd, and J. R. Speakman. 1996c. The relationship between foraging behaviour
and energy expenditure in Antarctic fur seals. Journal of Zoology 239:769-782.
Authier, M. La micro-évolution en conditions naturelles. Cas de la taille corporelle chez l'otarie à
fourrure subantarctique (Arctocephalus tropicalis) sur l'île d'Amsterdam, océan Austral. 2007.
Rapport de Master 2, Université Paul Sabatier, Toulouse.
Beauplet, G., C. Barbraud, M. Chambellant, and C. Guinet. 2005. Interannual variation in the post-
weaning and juvenile survival of subantarctic fur seals: influence of pup sex, growth rate and
oceanographic conditions. Journal of Animal Ecology 74:1160-1172.
Beauplet, G., C. Guinet, and J. P. Y. Arnould. 2003. Body composition changes, metabolic fuel use,
and energy expenditure during extended fasting in subantarctic fur seal (Arctocephalus
tropicalis) pups at Amsterdam Island. Physiological and Biochemical Zoology 76:262-270.
Bonadonna, F., M. A. Lea, O. Dehorter, and C. Guinet. 2001. Foraging ground fidelity and route-
choice tactics of a marine predator: the Antarctic fur seal Arctocephalus gazella. Marine
Ecology-Progress Series 223:287-297.
Bonadonna, F., M. A. Lea, and C. Guinet. 2000. Foraging routes of Antarctic fur seals (Arctocephalus
gazella) investigated by the concurrent use of satellite tracking and time-depth recorders. Polar
Biology 23:149-159.
Boyd, I. L. 1999. Foraging and provisioning in Antarctic fur seals: interannual variability in time-
energy budgets. Behavioral Ecology 10:198-208.
Boyd, I. L., J. P. Y. Arnould, T. Barton, and J. P. Croxall. 1994. Foraging behavior of Antarctic fur
seals during periods of contrasting prey abundance. Journal of Animal Ecology 63:703-713.
Cézilly, F. and S. Benhamou. 1996. Optimal foraging strategies: A review. Revue d'Ecologie-la Terre
et la Vie 51:43-86.
Charnov, E. L. 1976. Optimal foraging, marginal value theorem. Theoretical Population Biology
9:129-136.
Charrassin, J. B. and C. A. Bost. 2001. Utilisation of the oceanic habitat by king penguins over the
annual cycle. Marine Ecology-Progress Series 221:285-297.
Costa, D. P. and F. Trillmich. 1988. Mass changes and metabolism during the perinatal fast - A
comparison between Antarctic (Arctocephalus-gazella) and Galapagos fur seals
(Arctocephalus-galapagoensis). Physiological Zoology 61:160-169.

30
Dale, M. R. T., P. Dixon, M. J. Fortin, P. Legendre, D. E. Myers, and M. S. Rosenberg. 2002.
Conceptual and mathematical relationships among methods for spatial analysis. Ecography
25:558-577.
DeAngelis, D. L. and W. M. Mooij. 2005. Individual-based modeling of ecological and evolutionary
processes. Annual Review of Ecology Evolution and Systematics 36:147-168.
Fauchald, P. 1999. Foraging in a hierarchical patch system. American Naturalist 153:603-613.
Fauchald, P. and T. Tveraa. 2003. Using first-passage time in the analysis of area-restricted search and
habitat selection. Ecology 84:282-288.
Georges, J. Y. and C. Guinet. 2000. Maternal care in the subantarctic fur seals on Amsterdam Island.
Ecology 81:295-308.
Grimm, V. and S. F. Railsback. 2005. Individual-based Modeling and Ecology. Princeton University
Press, Princeton.
Grunbaum, D. 1998. Using spatially explicit models to characterize foraging performance in
heterogeneous landscapes. American Naturalist 151:97-115.
Guinet, C., Y. Cherel, V. Ridoux, and P. Jouventin. 1996. Consumption of marine resources by
seabirds and seals in Crozet and Kerguelen waters: Changes in relation to consumer biomass
1962-65. Antarctic Science 8:23-30.
Guinet, C., L. Dubroca, M. A. Lea, S. Goldsworthy, Y. Cherel, G. Duhamel, F. Bonadonna, and J. P.
Donnay. 2001. Spatial distribution of foraging in female Antarctic fur seals Arctocephalus
gazella in relation to oceanographic variables: a scale-dependent approach using geographic
information systems. Marine Ecology-Progress Series 219:251-264.
Guinet, C., M. A. Lea, and S. D. Goldsworthy. 2000. Mass change in Antarctic fur seal (Arctocephalus
gazella) pups in relation to maternal characteristics at the Kerguelen Islands. Canadian Journal
of Zoology-Revue Canadienne de Zoologie 78:476-483.
Kacelnik, A. 1984. Central place foraging in starligs (Sturnus vulgaris) .1. Patch residence time.
Journal of Animal Ecology 53:283-299.
Kacelnik, A., A. I. Houston, and P. Schmidhempel. 1986. Central-place foraging in honey-bees - The
effect of travel time and nectar flow on crop filling. Behavioral Ecology and Sociobiology
19:19-24.
Kramer, D. L. and W. Nowell. 1980. Central place foraging in the eastern chipmunk, Tamias-striatus.
Animal Behaviour 28:772-778.

31
Lea, M. A., Y. Cherel, C. Guinet, and P. D. Nichols. 2002. Antarctic fur seals foraging in the Polar
Frontal Zone: inter-annual shifts in diet as shown from fecal and fatty acid analyses. Marine
Ecology-Progress Series 245:281-297.
Lemon, W. C. 1991. Fitness consequences of foraging behavior in the zebra finch. Nature 352:153-
155.
MacArthur, R. H. and E. R. Pianka. 1966. On Optimal Use of a Patchy Environment. The American
Naturalist 100:603-609.
McCafferty, D. J., I. L. Boyd, T. R. Walker, and R. I. Taylor. 1998. Foraging responses of Antarctic
fur seals to changes in the marine environment. Marine Ecology-Progress Series 166:285-299.
McNamara, J. M. and A. I. Houston. 1996. State-dependent life histories. Nature 380:215-221.
Moen, R., J. Pastor, and Y. Cohen. 1997. A spatially explicit model of moose foraging and energetics.
Ecology 78:505-521.
Nevitt, G. 1999. Olfactory foraging in Antarctic seabirds: a species-specific attraction to krill odors.
Marine Ecology-Progress Series 177:235-241.
Orians, G. H. and N. E. Pearson. 1979. On the theory of central place foraging. Pages 155-177
Analysis of ecological systems. Ohio State University Press, Columbus, Ohio.
Park, Y. H., L. Gamberoni, and E. Charriaud. 1991. Frontal structures and transport of the Antarctic
circumpolar current in the South Indian-Ocean sector, 40-80-degrees-E. Marine Chemistry
35:45-62.
Pyke, G. H. 1984. Optimal foraging theory - A critical-review. Annual Review of Ecology and
Systematics 15:523-575.
R Development Core Team. R: A language and environment for statistical computing. 2006. R
Foundation for Statistical Computing, Vienna, Austria.
Reid, K. and J. Forcada. 2005. Causes of offspring mortality in the Antarctic fur seal, Arctocephalus
gazella: the interaction of density dependence and ecosystem variability. Canadian Journal of
Zoology-Revue Canadienne de Zoologie 83:604-609.
Ritchie, M. E. 1990. Optimal foraging and fitness in Columbian ground-squirrels. Oecologia 82:56-67.
Stephens, D. W. and J. R. Krebs. 1986. Foraging Theory. Princeton University Press, Princeton.
Thompson, D. and M. A. Fedak. 2001. How long should a dive last? A simple model of foraging
decisions by breath-hold divers in a patchy environment. Animal Behaviour 61:287-296.
Turchin, P. 1998. Quantitative Analysis of Movement: Measuring and Modeling Population
Redistribution in Animals and Plants. Sinauer Associates, Sunderland, Massachusetts,USA.

Résumé
Les stratégies d’approvisionnement déterminent la capacité d’un individu à acquérir
des ressources alimentaires, et influent donc sur sa survie et sa reproduction. En conséquence,
il est supposé que l’évolution devrait sélectionner les stratégies permettant un
approvisionnement optimal : choix de proie, choix de patch et temps à y passer… Le mode de
déplacement dans un milieu hétérogène, où la ressource subit des variations au cours du
temps, conditionne également l’efficacité de l’acquisition de nourriture et d’énergie. En
période de reproduction le nourrissage de la progéniture constitue une contrainte temporelle et
énergétique supplémentaire. Un modèle individu-centré spatialement explicite intégrant la
distribution de la ressource, les choix comportementaux et le métabolisme énergétique a été
construit pour évaluer l’effet de différentes stratégies de recherche d’une part et de
l’agrégation et de l’abondance de la ressource d’autre part sur la survie et le succès
reproducteur d’un prédateur marin opérant depuis une colonie : l’otarie à fourrure antarctique.
Dans tous les milieux, une stratégie de recherche par marche aléatoire corrélée à la ressource
est plus efficace qu’une marche aléatoire. L’efficacité d’approvisionnement est optimale
lorsque la ressource est abondante, prédictible, proche du site de reproduction et faiblement
agrégée. La confrontation des résultats simulés à des observations indépendantes valide le
modèle, qui est générique et peut facilement être adapté à d’autres espèces.
Abstract
Foraging strategies modulate individual’s capacity to obtain food resource, and
therefore impact its survival and reproduction. Consequently, optimal foraging strategies are
thought to evolve through natural selection to maximise energy intake from prey and patch
selection and patch departure decisions. Movement strategies in a heterogeneous environment
where spatial and temporal variations in resource occurs also determine both food and energy
acquisition efficiency. During reproduction, progeny feeding is a supplementary temporal and
energetic constraint. A spatially explicit, individual-based model unifying resource spatial
distribution, behavioural choices and energy metabolism was developed. We investigated the
effects of movement strategies and abundance/aggregation of resource on survival and
reproductive success of Antarctic fur seal, a marine central-place forager. Using a resource-
correlated random walk provided a higher reproductive success than random walk. Maximum
foraging efficiency occurred when resource was abundant, predictable, close to the colony
and weakly aggregated. The model was validated with respect to observed data. This model is
generic and can easily be adapted to other central-place foragers.