Embed Size (px)
Citation preview

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 1 / 17
TD d’initiation à la mécanique du solide : Cinématique et Dynamique
Pour chaque TD : A partir d’un système réel,
1. Fixer les objectifs de l’étude, définir les données en entrée et les données souhaitées en sortie.
2. Modéliser les liaisons pour pouvoir ensuite isoler chaque pièce ou ensemble de pièces (classes d’équivalence), formuler par écrit toutes les hypothèses de modélisation.
3. Utiliser les outils de mécanique adaptés au problème. (ex de Question : pour déterminer des actions de liaison, faut-il une étude statique ou prendre en compte les effets dynamiques lorsque les pièces sont en mouvement ?)
1. Mouvement de translation : mécanique du solide e n rotation, : Sur une droite orientée, on choisit une origine O et un vecteur unitaire x. Le point M
est situé sur cette droite et on pose ...xoxOM= Le mouvement du point M, initialement immobile en O, est caractérisé par trois phases :
� accélération constante pendant le temps t1 (5s), � mouvement à vitesse constante (10m/s) pendant le temps t2 (6s), � décélération constante de même module que dans la première phase jusqu’à l’arrêt tf.
1. Tracer l’allure des courbes a(t ),v(t ),x(t ) pour t compris entre t0 et tf
2. Déterminer analytiquement la vitesse et la position de M en fonction de t. Entre Os et t1 GM/O = a= cte donc VM/0 = at et xM (t) = ½ at² A t=5s, at = 10 donc a = 10/5 donc a = 2 ms-2 et x5 = 0,5*2*25 = 25m (intégrale sous la courbe des vitesses entre 0 et 5 s) Entre t1 et t2, l’accélération est nulle donc la vitesse constante = 10 ms-1 A t2= 16 s on a xM(16s) = 60+25m = 85 m À t3 on a une accélération nulle et une vitesse nulle. La distance parcourue entre t0 et t1 est la même qu’entre t2 et t3 = 25m XM (t3) = 110 m
(a en ms-2) (V en ms-1) (x en m) t
t1 t2 t3

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 2 / 17
2. Voiture dans un virage : mouvement de rotation, CIR Un véhicule à 4 roues roule en tournant à plat. On appelle R le rayon de courbure de la trajectoire de la roue arrière gauche, e l’empattement et L la largeur du véhicule au niveau des moyeux des roues. 1 – Déterminer graphiquement la position du centre instantané de rotation du mouvement. Les vitesses des points de centre Mi des axes des roues appartenant au véhicule / sol sont perpendiculaires à OMi (O étant le CIR). Les points de contact Ci des roues avec le sol ont une vitesse / sol nulle. (CIR du mvt de la roue/sol). V Mi(véhicule/sol) = V Mi(roue/sol) est donc inscrit dans le plan des roues et // au sol. Le CIR du mvt du véhicule/sol est à l’intersection des perpendiculaires aux vitesses V Mi(véhicule/sol).
2 – Déterminer l’angle entre les directions d’alignement des roues directrices en fonction de e, R et L tan (αd) = e/(L+R) et tan (αg) = e/( R) 3 – Déterminer les vitesses des différents centres des roues en fonction de la vitesse angulaire ω(veh/sol) de rotation du véhicule VMavg (vehicule/sol) = ω(veh/sol) Ravg avec Ravg = R/cos(αg ) = (R²+e²) ½ VMavd (vehicule/sol) = ω(veh/sol) Ravd avec Ravg = R/cos(αd ) = ((R+L)²+e²) ½ VMarg (vehicule/sol) = ω(veh/sol) Rarg avec Rarg = R VMard (vehicule/sol) = ω(veh/sol) Rard avec Ravg = R+e 4- Déterminer la vitesse de rotation moyenne entre les roues avant du véhicule.
La vitesse d’une roue/sol = ω(veh/sol) (Roue i/sol) = VMi(véhicule/sol)/rroue
ω(Roue avg/sol) = VMiavg(véhicule/sol)/rroue = ω(veh/sol) R/cos(αg) ω(Roue avd/sol) = VMiavd(véhicule/sol)/rroue = ω(veh/sol) R/cos(αd) ω moyen roues avant =[ ω(veh/sol) R/cos(αg)+ ω(veh/sol) R/cos(αg)]/2 (vitesses de sortie de la BdV du véhicule. Le différentiel permet la différence de vitesse entre les deux roues avant (cette différence se fait à la demande, en fonction des vitesses du véhicule, du rayon de braquage et de la route).
Ci
Mi VMi (roue/sol)
O
R L
e ααααg ααααd
Mavg Mavd
Mard Marg
Mc

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 3 / 17
3. Vérin de niveau de caravane : Composition de mouvements, CIR
1. Le centre instantané de rotation de (4) par rapport au sol et la vitesse de B(4/sol).
I 40 = CIR : intersection de CE et de la perpendiculaire au sol en H. VB (4/sol) en est déduit. 2. La vitesse du point H par rapport au sol.(VE(4/0) * (H.I40 / E.I40) 3. Les directions des vitesses des points C(2,1) C(1/0)
V C(2/7)=0 = V C( 3/2), C(3/7) 4. En utilisant l’équiprojectivité déterminer les vitesses de C(2/1) équiprojectivité des vitesses de 3/0 et composition des vitesses en C
4. Robot de préhension* : Composition de vitesses e t accélérations.
Un objet de masse M est fixé à P3. Ses coordonnées dans le repère 03R3 sont :
CbM= cx3+dz3 avec c et d constants R3 (x3, y3. z3=z2)
R2(x2,y2,z2)//Rl Rl(xl,yLzl)//RO RO (xO, yO. zO)
z1 a OO 1O = z2 | )x2,x3.....(_y2b 0O 21 θ==
Déterminer : • La vitesse instantanée de M3 par rapport à R2 puis RI et RO. • L'accélération de M3 par rapport à R2 puis RI et RO.
La vitesse instantanée de M3 par rapport à R2 puis RI et RO. L'accélération de M3 par rapport à R2 puis RI et RO.
Eléments de correction
A chaque instant nous pouvons définir en M plusieurs points :
V H(4/0)
V E(1/0)
V C(2/1)
V C(2/1)
I40 V C(1/0)
V C(2/0)

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 4 / 17
M : point géométrique fixe de l'espace M3 point géométrique appartenant à 3 et confondu à l'instant t avec M M2 point géométrique appartenant à 2 et confondu à l'instant t avec M... Lorsque l'on parle de vitesse, il faut donc définir la vitesse de quel Point (de PI, P2, P3...) par rapport à quel repère (lieu d'observation du mouvement).
Ici la vitesse de M appartenant à 3 par rapport à R2 est une vitesse due au mouvement de rotation de 3 par rapport à 2. Mise en place des repères : 3 tourne par rapport à 2, l'axe de rotation est z2=z3 et la position est repérée
par un angle.
On utilise ici la composition de vitesses pour écrire les vitesses de M3 par rapport aux différents repères. Le mouvement de 2/1 est une translation d'axe y2 de vitesse b' (tous les points du solide ont la même vitesse) Le mouvement de 1/0 est une translation d'axe zl de vitesse a'
L'accélération de M3 par rapport à R2 puis RI et RO. L'accélération est la dérivée de la vitesse. Il faut faire
attention au repère de dérivation (différent du repère d'écriture). On exprime ici le plus simplement possible l'accélération du point M3 par rapport au repère général RO. Cette accélération n'est pas forcément exprimée dans le repère RO
5. Etude Cinématique d’un train simple (maquette) : composition de vitesses
Un train épicycloïdal (voir la figure suivante) est constitué d’un pignon central 1 appelé "planétaire", d'un (ou trois) pignon 3 appelé "satellite" en liaison pivot en A avec le "porte-satellite" 2 et d’une couronne 4. Pour obtenir un rapport de vitesse, il faut qu'un arbre (1, 2 ou 4) soit moteur, un arbre soit récepteur et un arbre soit bloqué lié au bâti. On peut aussi avoir

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 5 / 17
deux arbres moteurs et un arbre récepteur.. On rappelle que le diamètre d d'un engrenage est définie par d = m Z, où Z est le nombre de dents et m est le module identique pour tous les engrenages.
Questions : 5.1. On se place dans un premier temps dans la configuration où le PS2 est fixe par rapport
au bâti. (ω ω ω ω 2/0 = 0 rd/s) On notera ωi /0, la vitesse de rotation de la pièce i par rapport au bâti 0)
• On pose ω1 /0, = ωe. • Déterminer la relation entre ω1/0 (=ω1/2), ω 3/0 (=ω3/2) et ω4/0 (=ω4/2).
• Déterminer le rapport ω4 /0, / ω1 /0, = k (=ω4 /2, / ω1 /2,)
5.2. On se place maintenant dans le cas général • A l’aide de ces deux relations et en utilisant la composition de vitesse (ωa/c =ωa/b + ωb/c), montrer que l’on
peut écrire 41
0/20/1
0/20/4
ZZ−=−
−ωωωω
Cette relation est une expression de la " formule de Willis ". Elle nous met en relation 3 vitesse pour une relation. Nous avons donc un mécanisme à deux degrés de liberté ou 2 mobilités. Pour le faire fonctionner, il est nécessaire de fixer la vitesse de deux éléments.
5.3. En négligeant les inerties et frottements déterminer la relation entre les couples d’entrée et de sortie.
Configuration avec porte-satellites 2 fixe / Bâti 0. On se place dans un premier temps dans la configuration où le PS2 est fixe par rapport au bâti. (ω 2/0 = 0 rd/s)
On notera ωi /0, la vitesse de rotation de la pièce i par rapport au bâti 0) ................................................................................................................................................................................ ω1/2 / ω3/2 = - Z3/Z1 (engrenages à contact extérieur) et ω3/2 / ω4/2 = Z 4 / Z3 (engrenages à contact intérieur)................................................................................... (ω1/2 / ω3/2)*( ω3/2 / ω4/2 )= (Z 4 / Z3) * ( - Z3/Z1)
(ω1/2 / ω4/2 )= - Z 4 /Z1 (ω(ω(ω(ω4/2 / ωωωω1/2 )= - Z 1 /Z4 et on note k = - Z 1 /Z4
Configuration avec porte-satellites 2 mobile / Bâti 0.
(1) (ω4/2 / ω1/2 )= - Z 1 /Z4 (2) ω1/2 = ω1/0 + ω0/2 ou (3) ω1/2 = ω1/0 - ω2/0 en prenant en compte les relations (1) et (3) on a (4) (ω4/0 - ω2/0) / (ω1/0 - ω2/0) = - Z1 / Z4 ou
Cette relation est une expression de la " formule de Willis ". Elle nous met en relation 3 vitesses pour une relation. Nous avons donc un mécanisme à deux degrés de liberté ou 2 mobilités. Pour le faire fonctionner, il est nécessaire de fixer les vitesses de deux éléments pour déduire la vitesse du troisième.
41
0/20/1
0/20/4
ZZ−=−
−ωωωω

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 6 / 17
Pour écrire la relation entre les couples on isole le satellite 3. Pour que le satellite soit en équilibre (en négligeant les frottements et inerties) on a les relations suivantes : F K(4/3) = F J(1/3) = - F A(2/3) / 2 C(sur 3) = - F K(4/3)*R3 = (F A(2/3) / 2)*R3
C(sur 1) = - F J(1/3)*R1 = (F A(2/3) / 2)*R1 = C(sur 4) R1/R3
C(sur 2) = - F A(2/3)*(R1+R3)/2 donc F A(2/3) = 2 C(sur 2)/ (R1+R3) C(sur 3) = C(sur 2) R3/ (R1+R3)
C(sur 1) = C(sur 2) R1/ (R1+R3) Dons si sur un élément, le couple résistant est nul, les autres couples sont nuls. F K(4/3)
F A(2/3)
F J(1/3 R1
R3

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 7 / 17
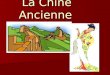
6. Différentiel 50/50 de véhicule de tourisme : com position de vitesses. Transmission de puissance
Les trois schémas et photo suivantes présentent un différentiel de voiture. La couronne en, liaison pivot/bâti est entraînée en rotation par le pignon de sortie de la bôite de vitesse. L’arbre Rg est relié à la roue gauche motrice et l’arbre Rd à la roue droite motrice.
Configuration A : en route droite, les deux roues à la même vitesse. Le satellite ne tourne par rapport à la couronne.
Configuration B : la roue gauche est bloquée et la roue droite tourne
. 1 Montrer que le différentiel est un train épicycloïdal conique (les roues et pignons sont coniques et non plus droits). Ecrire la relation de Willis reliant les différents éléments du train épicycloïdal
ωg = ωe + ∆ω et ωd = ωe - ∆ω 2 En isolant le satellite montrer que le couple transmis à chacune des roues est égal à la moitié du couple d’entrée. (Cg = Cd = Ce/2) 3 Déterminer pour la configuration A,
o les vitesses de rotation des deux roues/bâti ωg = ωe ω et ωd = ωe (route droite et même diamètre de roues)
o les couples maxi sur chaque roue. (Cg = Cd = Ce/2) 4 Déterminer pour la configuration B,
o les vitesses de rotation des deux roues/bâti
ωg = ωe + ∆ω =0 ωe =- ∆ω et ωd = 2ωe o les couples maxi sur chaque roue. (Cg = Cd = Ce/2) si sur Rd le couple est nul (roue dans la
boue ou sur la glace) les trois couples sont alors nul. Certains différentiels (auto bloquant, à glissement limité ou à blocage manuel) permettent de solidariser ou freiner le satellite relié à la roue sans adhérence et ainsi permettre d’avoir un couple moteur sur l’autre roue.
Rd
Rg
Couronne
Satellite Axe
Rd Rg

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 8 / 17
7. Réducteur d’extrudeuse mono vis. : réduction, pu issance, rendements.
Le réducteur ci-dessous permet de transmettre la puissance électrique du moteur à la broche d’extrudeuse. Un variateur de vitesse permet de moduler la vitesse de rotation de la sortie.
1. Nommez tous les éléments repérés ci-dessus.
2. Expliquez ce qu’est une courroie polyV et comment se fait la transmission de puissance pour ce type de courroie.
Butée à rouleaux sphériques Poulie réceptrice PRr
Poulie motrice du variateur de vitesse PMv
Poulie réceptrice du variateur de vitesse PRv
Tendeur
Poulie motrice PMr

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 9 / 17
Une courroie polyV est un assemblage de courroies de type trapézoïdal. Elles permettent la transmission d’un couple important pour de hauteur de courroies réduites (plus de flexibilité). La transmission de puissance se fait par adhérence entre les courroies et les flancs des poulies. 3. Schématisez le réducteur. 4. Calculez les vitesses maxi et mini de rotation de la vis.
NPRr = NPMr * (DPMr/DPRr)
NPRv = NPMv * (DPMv/DPRv)
NPRr = NPMv * (DPMr/DPRr) * (DPMv/DPRv) 1/3 < (DPMv/DPRv) <3 et (DPMr/DPRr) = 18/57 NPMv = 1500 tr/mn
158 tr/mn < NPRr < 1420 tr/mn
5. Déterminez les couples maxi et mini à la sortie. Psortie = Pentrée *rendement Psortie = Csortie * w sortie = Csortie * Nsortie * π/30 Csortie = Pentrée *rendement/( Nsortie * π/30) C sortie mini = 1000 * 0,4 / (1420 * π/30) = 2,6 Nm C sortie maxi = 1000 * 0,4 / (158 * π/30) = 24,2 Nm Données : N moteur = 1500 tr/mn, P sortie Moteur = 1 kW Le variateur de vitesse a un rapport de réduction compris entre 1/3 et 3. Le rendement total du mécanisme est estimé à 40% Toutes les autres données seront prises sur le dessin ou précisées par le candidat.
8. Véhicule dans une courbe : Dynamique du point matériel.
Une automobile roule à la vitesse constante de 90 km.h-1 dans un virage relevé d'angle a. Déterminer Les efforts dynamiques appliqués à la voiture a de façon à ce qu'il n'y ait aucune force tangentielle de frottement (ou d'adhérence) entre les pneus et la route si le rayon du virage est de 200 m. (Choisir les paramètres utiles pour ce problème)
Eléments de correction
Le problème posé ici met en œuvre des effets dynamiques dus à la masse de la voiture, à ses propriétés d'inertie ainsi qu'à la vitesse et l'accélération de la voiture par rapport à im repère galiléen.
En cours nous avons vu que le principe fondamental de la dynamique avait pour forme générale : PFD : principe fondamental de la dynamique.
PMv
PRv PMr
PRr

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 10 / 17
Il existe au moins un repère galiléen tel que le torseur dynamique d'un solide en mouvement par rapport à Rg (repère galiléen) est égal à la somme des actions mécaniques extérieurs qui lui sont appliquées.
avec
le Torseur cinétique
Torseur dynamique
Cette forme est très difficile à exploiter sans outils numériques si l'on désire prendre en compte les inerties réelles des pièces (matrices d'inerties obtenues par l'intermédiaire des logiciels de modélisation 3D) et que les mouvements sont complexes. Dans le cas de pré-étude on peut généralement simplifier les études en se posant trois questions :
1. Le solide étudié est-il assimilable à un point matériel, c'est à dire : est-ce que les dimensions du solide et ses tonnes vis à vis des autres données du problème sont petites (dans ce cas
est nul).
2. La tonne du solide est-elle assimilable à un volume élémentaire (cylindre, cube...) alors la forme de la matrice d'inertie est connue ou à un assemblage de volumes élémentaires alors on pourra utiliser les matrices des volumes élémentaire et le théorème de Huygens nous pennet d'obtenir la matrice d'inertie générale de la pièce.
3. Le mouvement est-il particulier (translation, rotation autour d'un axe fixe.... Dans ces cas le torseur dynamique a une forme simplifiée : voir les fonnes dans le cours)
Ici nous pouvons dire que la voiture (maxi 3 m de largeur) est assimilable à un point matériel vis à vis du rayon du virage de 200 m et de la trajectoire du véhicule.
Le principe fondamental de la dynamique (PFD) s'écrit donc ;
Bilan des actions extérieures :
En A et B ()nous avons des actions normales aux contacts (recherche d'aucune force tangentielle de frottement (ou d'adhérence) entre les pneus et la route) dirigée sur l’axe v.
Calcul de l'accélération en G par rapport à RO (repère galiléen) pour un mouvement de rotation autour de l'axe Oz :
R est ici négatif car il représente OG.x
et la vitesse de rotation (supposée
constante) est notée :
Ecriture du PFD : Somme des forces :

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 11 / 17
Somme des moments en G donc Ra = Rb La somme des forces projetée sur l'axe u donne : (Ra+Rb) sin αααα = -mR ω2
La somme des forces projetée sur l'axe v donne : (Ra+Rb) cos α - mg = 0
La combinaison des deux équations donne : -m g tan αααα = - m R ω² Soit : tan αααα = R ω2 / g
Cette méthode est utilisable pour définir des inclinaisons de pistes de circulation pour des véhicules de tous types (voitures, bouteilles sur chemins de circulation..) mais aussi pour des cheminements d’objets dans des lignes de production.
9. Tige composée : Matrice d’inertie Une tige mince AB, de longueur 1 et de masse m est fixée sur un disque (1) de masse M en rotation à la vitesse m I/O par rapport à un bâti fixe (O).
Déterminer • le moment cinétique de la tige en O, • l'énergie cinétique de la tige et de l'ensemble. • les actions d'encastrement en A • les actions d'encastrement en B : centre de la liaison pivot entre
1 et O (BO = dy + az ) .
Eléments de correction :
Le problème posé ici est un problème de dynamique : On a un solide non équilibré en rotation. Pour obtenir les moments d'inerties du solide il faut utiliser les matrices d'inerties des cylindres et le théorème de Huygens. La liaison pivot encaissera des efforts radiaux et des moments radiaux. PFD appliqué à un solide en rotation. Pour équilibrer le solide il faut utiliser deux masses positives (addition de masses) ou négatives (enlèvement de masses par perçage par exemple).
10. Réducteur : Démarrage en utilisant le théorème de l’énergie cinétique.
Une roue dentée A (masse 4 kg, rayon de gyration 120 mm, rayon primitif Ra = 150 mm) transmet son mouvement à une roue B (masse 12 kg, rayon de gyration 300 mm. rayon primitif Rb = 375 mm). L'ensemble est à l'arrêt lorsqu'un couple CA= 10 Nm est appliqué à la roue A. Les frottements sont négligés.
a) Quel nombre de tours fait la roue A avant qu'elle n'atteigne la vitesse de 900 tr.min-1.
b) Quel est le temps correspondant c) Calculer l'effort tangentiel FT exercé entre les deux roues.
Rayon de gyration : Rayon utilisé pour calculer Izz = MR2/2
Eléments de correction :
Le problème posé ici caractérise le démarrage d'un ensemble mécanique. A l'état initial les vitesses des deux roues sont nulles pour accélérer jusqu'à une vitesse de travail stabilisée. C'est durant ces périodes d'accélération que les couples moteurs nécessaires sont les plus importants. Ceux-ci vont donc caractériser les moteurs. Il faut donc utiliser un outil mécanique caractérisant les changements d'états (de la vitesse initiale à la vitesse finale). L'outil approprié est l'énergie cinétique. Le théorème de l'énergie cinétique nous pennet de relier la variation d'énergie et le travail des actions extérieures. Rappel : Pour un solide, la variation d'énergie cinétique entre tl et t2 est égale au travail des actions extérieures appliquées au solide. )

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 12 / 17
Pour un ensemble de solides, la variation d'énergie cinétique entre tl et t2 est égale au travail des actions extérieures appliquées au solide.
Hypothèses : les liaisons sont parfaites et il n'y a pas de frottement donc le travail des actions mutuelles est nul.
• Les roues ont un mouvement de rotation autour d'un axe fixe Oz donc : 2T = Ioz(S)ωz²(S/R )
• On connaît les rayons de giration des roues donc Izz = MR2/2
Application :
Théorème de l'énergie cinétique appliqué à la roue A : αa (en rd) = angle de rotation de entre l'état initial et l'état final, vitesse de rotation initiale ωai = 0 (rd/s) vitesse de rotation finale ωaf = π. Naf / 30 (rd/s)
Théorème de l'énergie cinétique appliqué à la roue B : αb = αa . (Ra/Rb) (en rd) = angle de rotation de entre l'état initial et l'état final, vitesse de rotation initiale ωbi = 0 (rd/s) vitesse de rotation finale ωbf = ωaf (Ra/Rb) (rd/s) Roue Bilan des
actions Travail des actions extérieures Energie cinétique Théorème de l'Energie
cinétique A Cext/A et
FB/A Cext/A αa (travail moteur) et - FB/A Ra αa (travail résistant)
(Ja/2.) (ωaf ²- ωai²) (Ja / 2.) (ωaf - ωai )2 = Cext/A αa - FB/A Ra αa
B Cext/B FA/B αb
(Jb/2.)( ωbf²-ωbi²) = C'ext/B αb - FA/B Rb αb
Le couple CCext/A est le couple moteur Cm, le couple Cext/B est nul en phase de démarrage s'il n'y a pas de résistance. FB.A=- FA.B=
Ft (force tangentielle au niveau de l'engrenage A-B).
(Ja / 2.) (ωaf)2 = Cm αa - Ft Ra αa et (Jb / 2.) (ωbf)2 = Ft Ra αa (car Ra αa= Rb αb)
dans la première équation on a (Ja / 2.) (coaf)2 = Cm αa - (Jb / 2.) (ωbf)2 ou Cm αa = (Ja / 2.) (ωaf)2 + (Jb / 2.) (ωbf)2
ou αa = [(Ja / 2.) (ωaf)2 + (Jb / 2.) (ωbf)2] / Cm |et Ft = (Jb / 2.) (ωbf)2 / Ra αa
Résultats numériques :| αa = 51, 16 rds et Ft = 50 N

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 13 / 17
11. Complément sur les différentiels 11.1. Différentiel central.
Lors de transmissions intégrales un différentiel central permet de distribuer la puissance mécanique vers les trains avant et arrière d'. Le plan ci-dessous représente une boîte transfert permettant un blocage de différentiel et la distribution, grâce au train épicycloïdal, du couple en répartition inégale entre les trains avant et arrière du véhicule.
Cette boîte transfert permet également de bloquer le différentiel en cas de patinage des roues avant ou arrière. Ce blocage s’opère à l’aide d’un crabot, commandé par une fourchette, solidarisant le porte satellite et un planétaire.
moteur BdV
Boîte transfert et différentiel central
Différentiel avant
Différentiel arrière
différentiel Blocage de différentiel

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 14 / 17
. 11.2. Boîte transfert et différentiel « Dangel » : glissement limité
Ce différentiel est monté sur des véhicules classiques transformés en 4x4.

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 15 / 17
11.3. Visco-coupleur Différents types de différentiels, soit à blocage total par crabots soit à glissement limité sont montés sur les essieux. Le différentiel interpont est un visco-coupleur, un différentiel à transfert de couple par glissement limité, un Torsen, ou encore un coupleur Haldex. http://www.histomobile.com/histomob/internet/techniqu/134-4.jpgFonctionnement du coupleur Haldex. Une différence de régime entre les deux arbres provoque le fonctionnement de la pompe, qui met alors en pression l'embrayage multi-disques. Une vanne pilotée électroniquement permet d'éviter le serrage de l'embrayage lorsque cela n'est pas souhaitable.
11.4. Le pont Torsen L'inconvénient du différentiel standard est que si l’arbre A tourne avec (ou sans) un couple CA plus vite que le boîtier de différentiel, le satellite entraîne en sens inverse l’arbre B avec (ou sans) un couple de transmission CB : en permanence CA=CB. Le fonctionnement du pont TORSEN utilise le principe d'irréversibilité des engrenages roues et vis sans fin. (En choisissant correctement les géométries de la vis et de la roue, la vis pourra entraîner la roue en rotation mais la roue ne pourra pas entraîner la vis en rotation) Ce pont peut être monté en différentiel central ou sur un train moteur.
Comportement en courbe (pour un montage en différentiel de pont):
• A tend à tourner plus vite que la couronne, A entraîne A 1 en rotation. • dans cette même courbe B tend à tourner moins vite que la couronne. B entraîne B 1 en rotation, mais
en sens inverse . • A 2 et B 2 tournant en sens inverse, le fonctionnement est autorisé.
Couronne du différentiel
Arbre A avec sa vis
Arbre B
Roue A1
Pignon A2

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc impression le 08/09/2009 16 / 17
Comportement en décélération : Le couple vient de A et B.
• en ligne droite, et avec les mêmes conditions d'adhérence, • A 2 et B 2 ont tendance à tourner dans le même sens d'où blocage du
système. • l’essieu devient rigide .
Comportement lorsqu’une roue a tendance à patiner :
• Si A manque d'adhérence, A tend à entraîner A 1 qui fait tourner A 2 qui engraine B 2 qui fait tourner B 1,
• à cause de l' irréversibilité , B 1 (roue) ne peut pas faire tourner B (vis) .
• Il y a donc transfert de couple de la roue en perte d'adhérence vers la roue adhérente,
• Le système est bloqué et le patinage est rendu impossible. Comportement en décélération : Le TORSEN, réagit comme un ABS, en évitant pratiquement tout blocage intempestif des roues cet aspect positif présente pour la sécurité, un avantage indéniable. Son rendement mécanique, légèrement inférieur à celui du différentiel classique ( frottements internes un peu plus importants) reste toutefois supérieur à celui du différentiel à glissement limité. Pour donner un ordre de grandeur, on signalera que son surcoût en 1998 était comparable à celui d'un ABS. En 2004, les ABS produits en grande série ont vu leurs coûts diminués. ,

Sujet de TP de CM GMP2
corrections ciné-dynamique 2009-2010.doc 08/09/2009 Page 17 sur 17












![arXiv:0909.5076v1 [physics.flu-dyn] 28 Sep 2009](https://img.pdfslide.fr/doc/110x75/6264f5fe9c1f736b2253c4be/arxiv09095076v1-28-sep-2009.jpg)