Embed Size (px)
Citation preview
Julie DÉSERTI
AUTOMORPHISMES D’ENTROPIEPOSITIVE, LE CAS DES SURFACESRATIONNELLES

ii
Julie DÉSERTI
Institut de Mathématiques de Jussieu, Université Paris 7, Projet Géométrie et Dynamique,Site Chevaleret, Case 7012, 75205 Paris Cedex 13, [email protected]
Keywords :Birational maps, birational geometry, iteration problems, topological entropy,rotation domains and linearization, FATOU sets.
Introduction
Si f est un automorphisme sur une surface complexe compacteZ d’entropie topologiquepositive, alors ou bien la dimension de KODAIRA deZ est nulle et dans ce casf est conjuguéà un automorphisme de l’unique modèle minimal deZ qui doit être un tore, une surface K3ou une surface d’ENRIQUES; ou bien la surfaceZ est rationnelle non minimale etf estbirationnellement conjuguée à une transformation birationnelle du plan ([Can99]). Le casdes surfaces K3 a été en particulier étudié par [Can01, McM02, Ogu, Sil91, Wan95]. Undes premiers exemples donné dans le contexte des surfaces rationnelles est dû à COBLE
([Cob61]) ; nous en reparlerons au Chapitre 3. Donnons un autre exemple bien connu :soientΛ = Z[i] et E = C/Λ. Le groupe SL2(Λ) agit linéairement surC2 et préserve leréseauΛ×Λ; par suite tout élémentA de SL2(Λ) induit un automorphismefA sur E×Equi commute avecι(x,y) = (ix, iy). L’automorphismefA se relève en un automorphismefA sur la désingularisée de(E×E)/ι, qui est une surface de KUMMER. Cette surface estrationnelle et l’entropie defA est positive dès que le module de l’une des valeurs propres deA est strictement plus grand que 1.
On va s’intéresser aux surfaces obtenues en éclatant le planprojectif complexe en un nombrefini de points ; ceci est justifié par le théorème de NAGATA ([Nag60], Theorem 5) : soientZ une surface rationnelle etf un automorphisme surZ tel que f∗ soit d’ordre infini ; alorsil existe une suite d’applications holomorphesπ j+1 : Z j+1→ Z j telles queZ1 = P2(C),ZN+1 = Z et π j+1 soit l’éclatement dep j ∈ Z j . De telles surfaces sont appeléessurfacesrationnelles basiques. Néanmoins une surface obtenue à partir deP2(C) après des éclate-ments génériques n’a pas d’automorphisme non trivial ([Hir88, Koi88 ]).
Dans [McM07] M CMULLEN, en s’appuyant sur des travaux de NAGATA et HARBOURNE,donne un analogue du théorème de TORELLI pour les surfaces K3 : il construit des auto-morphismes sur certaines surfaces rationnelles en prescrivant l’action de l’automorphismesur les groupes de cohomologie de la surface. Ces surfaces sont des surfaces rationnellespossédant, à facteur multiplicatif près, une unique 2-forme méromorpheΩ qui ne s’annulepas. Si f est un automorphisme surZ obtenu via cette construction,f ∗Ω est proportion-nelle àΩ et f préserve le lieu des pôles deΩ. Notons que lorsqu’on projetteZ sur le planprojectif complexe,f induit une transformation birationnelle qui préserve une cubique.
1

2 INTRODUCTION
Dans [BK06, BK09, BKa] le point de vue est quelque peu différent. Les auteurs consi-dèrent des transformations birationnelles deP2(C) et ajustent les coefficients de celles-ciafin de trouver une suite finie d’éclatementsπ : Z → P2(C) telle que l’application indui-te fZ = π−1 f π soit un automorphisme deZ . Alors ils calculent le premier degré dynamiqueet établissent si la famille est triviale ou non. Certains deleurs travaux sont inspirés par[HV00b, HV00a, Tak01a, Tak01b, Tak01c]. Notons que la construction de McMullen nepermet pas d’obtenir tous les automorphismes construits par BEDFORD et KIM . Ces der-niers produisent en particuliers des exemples ne préservant aucune courbe mais aussi desfamilles continues. Ils montrent des propriétés de nature dynamique comme par exemple lacoexistence de domaines de rotation de rang 1 et 2.
Dans [DG10] les auteurs étudient une famille de transformations birationnelles(Φn)n≥2;ils construisent, pour toutn, deux points infiniment prochesP1 et P2 de P2(C) ayant lapropriété suivante :Φn induit un isomorphisme entreP2(C) éclaté enP1 et P2(C) éclatéen P2. Ensuite ils donnent des conditions générales portant surΦn permettant de trouverdes automorphismesϕ de P2(C) tels queϕΦn soit un automorphisme deP2(C) éclaté enP1, ϕ(P2), (ϕΦn)ϕ(P2), . . . , (ϕΦn)
k ϕ(P2) = P1. Cette démarche n’étant pas propre àΦn
ils l’appliquent à d’autres transformations. Enfin ils utilisent la théorie générale des dé-formations des variétés complexes pour décrire explicitement les petites déformations dessurfaces rationnelles ; cela leur permet de donner un critère simple pour compter le nombrede paramètres d’une déformation d’une surface rationnellebasique donnée.
Dans un premier chapitre nous rappelons des propriétés des automorphismes polynomiauxdeC2 et des transformations birationnelles du plan projectif complexe. Dans le second nousdonnons quelques résultats de géométrie birationnelle comme le théorème de factorisationde ZARISKI, la notion de dimension de KODAIRA, la description des surfaces complexescompactes kählériennes. Ensuite nous rappelons des énoncés de linéarisation, des propriétésdes automorphismes d’entropie positive, la notion de composantes de FATOU etc. Le cha-pitre 4 est consacré au travail de MCMULLEN ([McM07]), les chapitres 5 et 6 aux résultatsde BEDFORDet KIM ([BK09, BKa, BKb ]) et le dernier à [DG10].
Remerciements.Je tiens à remercier D. CERVEAU pour sa générosité, ses encoura-gements et son enthousiasme permanents. Merci à P. SAD pour son invitation au sud del’équateur, les séminaires bis... et à J. GRIVAUX pour sa précieuse aide. Merci à l’IMPApour son accueil formidable et au CNRS pour la délégation quim’a permis de réaliser ceprojet.
Table des matières
Introduction 1Remerciements 2
Chapitre 1. Groupe des automorphismes polynomiaux deC2 et groupe de CREMONA 51. Groupe des automorphismes polynomiaux deC2 52. Groupe des transformations birationnelles 7
Chapitre 2. Un peu de géométrie algébrique 171. Quelques définitions et propriétés 172. Théorème de factorisation de ZARISKI 203. Matrices caractéristiques 224. Dimension de KODAIRA 23
Chapitre 3. Un peu de dynamique 251. Linéarisation 252. Où chercher des automorphismes d’entropie positive ? 262.1. Entropie topologique 262.2. Un théorème de CANTAT 272.3. Cas des surfaces rationelles non minimales 283. Propriétés d’un automorphisme d’entropie positive 294. Trois involutions 294.1. Étude deσ 304.2. Étude deρ 334.3. Étude deτ 365. Ensembles de FATOU 395.1. Définitions et propriétés 395.2. Ensemble de FATOU des automorphismes de HÉNON 405.3. Ensemble de FATOU des automorphismes d’entropie positive sur les tores,
(quotients de) K3, surfaces rationnelles 41
Chapitre 4. Automorphismes d’entropie positive et groupesde WEYL 431. Groupes de WEYL 43
3

4 TABLE DES MATIÈRES
1.1. Groupes de WEYL, I 431.2. Groupes de WEYL, II 451.3. Éléments de COXETER et nombres de SALEM 472. Cubiques marquées, éclatements marqués, paires marquées 482.1. Cubiques marquées 482.2. Éclatements marqués 492.3. Paires marquées 513. Résultats et idée de démonstration 524. Exemples 53
Chapitre 5. Exemples d’automorphismes d’entropie positive 551. Construction de surfaces et d’automorphismes 582. Courbes invariantes 593. Domaines de rotation 614. Groupe de WEYL 625. Description des conditions pour obtenir un automorphisme 62
Chapitre 6. D’autres exemples 651. Familles continues d’automorphismes d’entropie positive 651.1. Construction de surfaces rationnelles et d’automorphismes 651.2. Une famille de systèmes dynamiques 691.3. D’autres résultats 712. Dynamique des automorphismes d’entropie positive : domaines de rotation 722.1. Énoncés 722.2. Construction des automorphismes et des surfaces 73
Chapitre 7. Une autre façon de construire des automorphismes d’entropie positive 771. Construction 771.1. Définitions deP1, P2 771.2. Conditions de recollement 812. Une première famille d’automorphismes 823. D’autres exemples 84
Index 87
Bibliographie 89

CHAPITRE 1
Groupe des automorphismes polynomiaux deC2 et groupe deCREMONA
1. Groupe des automorphismes polynomiaux deC2
Un automorphisme polynomial deC2 est une application bijective de la forme suivante
C2→ C2, (x,y) 7→ ( f1(x,y), f2(x,y)), fi ∈ C[x,y].
L’ensemble de ces automorphismes forme un groupe, appelégroupe des automorphismespolynomiaux deC2, que nous noterons Aut[C2].Introduisons deux sous-groupes naturels de Aut[C2]
E = (x,y) 7→ (αx+P(y),βy+ γ) |α, β, γ ∈ C, αβ 6= 0, P∈ C[y],A = (x,y) 7→ (a1x+b1y+c1,a2x+b2y+c2) |ai , bi , ci ∈ C, a1b2−a2b1 6= 0.
On dit que A est legroupe des automorphismes affineset E legroupe des automorphismesélémentaires; ce sont les exactement les automorphismes qui préservent le feuilletage « ho-rizontal » dy = 0.Soit S= A ∩E le groupe des automorphismes affines triangulaires
S= (x,y) 7→ (a1x+b1y+c1,b2y+c2) |ai , bi , ci ∈C, a1b2 6= 0.Le groupe Aut[C2] a une structure de produit amalgamé.
THÉORÈME1.1 ([Jun42]). Le groupeAut[C2] est le produit amalgamé des sous-groupesAetE le long de leur intersectionS.Autrement dit tout élémentϕ deAut[C2] \S s’écrit (a1)e1 . . .an(en) avecai dansA \E, ei
dansE\A; de plus, cette écriture est unique modulo les relations naturelles
aiei = (ais)(s−1ei), ei−1ai = (ei−1s′)(s′−1ai), s, s′ ∈ S.
REMARQUE 1.2. Hormis dans certains cas (cas résonants) un automorphisme élémen-taire est conjugué à un automorphisme affine. Cependant il existe dans Aut[C2] des élémentsnon conjugués à des automorphismes affines ; c’est par exemple le cas desautomorphismesdeHÉNON généralisés
(y,P(y)−δx), δ ∈ C∗, P∈ C[y], degP≥ 2,
5

6 1. GROUPE DES AUTOMORPHISMES POLYNOMIAUX DEC2 ET GROUPE DE CREMONA
qui s’écrivent aussi(y,x)(−δx+P(y),y) avec(y,x) dans A\E et(−δx+P(y),y) dans E\A.
À l’aide du théorème de JUNG, FRIEDLAND et MILNOR ont démontré l’énoncé suivant.
PROPOSITION1.3 ([FM89]). Soit f un automorphisme polynomial deC2. On a l’al-ternative
– f est conjugué à un élément deE;
– f est conjugué à une composée d’applications deHÉNON généralisées,i.e.
f = ϕg1 . . .gnϕ−1
où ϕ est dansAut[C2] et lesgi des applications deHÉNON généralisées.
Dans le premier casf est ditde type élémentaire, dans le secondde typeHÉNON ; H désignele semi-groupe des composées d’applications de HÉNON généralisées.
REMARQUE 1.4. Les automorphismes affines sont de type élémentaire (triangulationdes matrices).
Nous allons voir que cette dichotomie type élémentaire/type HÉNON se poursuit :– Tout élément de type élémentaire préserve une fibration rationnelle alors qu’un auto-
morphisme de type HÉNON n’en préserve pas.– Les automorphismes de type élémentaire ont tous un centralisateur non dénombrable
(en fait presque tous se plongent dans un groupe à un paramètre de Aut[C2]) alorsque le centralisateur d’un automorphisme de type HÉNON est dénombrable, souventmême réduit à ses itérés ([Lam01]).
– Un automorphisme de type HÉNON possède une infinité de points périodiques hyper-boliques.
Le degré algébriqued’un automorphisme polynomial
f : C2→ C2, (x,y) 7→ ( f1(x,y), f2(x,y)), fi ∈ C[x,y]
est défini par degf = max(degf1,degf2). Ce degré n’est pas un invariant dynamique (engénéral sif , g sont dans Aut[C2], alors deg( f g f−1) 6= degg) ; on introduit donc un seconddegré, le degré dynamique ([Dil96, FM89]), défini par
λ( f ) = limn→+∞
(degf n)1/n.
On peut vérifier que celui-ci est un invariant dynamique (en fait il existe deux constantesstrictement positivesα et β telles que
αdeggn≤ deg( f gn f−1)≤ βdeggn
pour tout entiern).

2. GROUPE DES TRANSFORMATIONS BIRATIONNELLES 7
Si f est un automorphisme élémentaire, on a degf n = degf d’où λ( f ) = 1. Au contraire,pour un élémentf de H , on a λ( f ) = degf ; plus précisément sif = f1 . . . fn, avec fiapplication de HÉNON généralisée, on a degf = ∏
idegfi ≥ 2 (voir [FM89]). Par suite
– f est de type élémentaire si et seulement siλ( f ) = 1;
– f est de type HÉNON si et seulement siλ( f ) > 1.
La plupart des propriétés qui précèdent ont été démontrées en s’appuyant sur la structurede produit amalgamé de Aut[C2]. Plus précisément puisque Aut[C2] = A ∗S E la théoriede BASS-SERRE assure que Aut[C2] agit de manière non triviale par translation à gauchesur un arbreT (voir [Ser77]). L’arbre T est défini comme suit : l’ensemble des sommetsest l’union disjointe des classes à gauche(Aut[C2])/A et (Aut[C2])/E et celui des arêtesl’union disjointe des classes à gauche(Aut[C2])/S. Pour tout automorphisme polynomialf l’arête f S relie les sommetsf A et f E. On hérite ainsi d’une action fidèle de Aut[C2]dans le groupe des isométries de l’arbreT . L’étude de cette action permet de démontrer denombreuses propriétés sur Aut[C2].
2. Groupe des transformations birationnelles
Unetransformation rationnelledeP2(C) dans lui-même est une transformation de la forme
P2(C) 99K P2(C), (x : y : z) 7→ ( f0(x,y,z) : f1(x,y,z) : f2(x,y,z))
où les fi sont des polynômes homogènes de même degré sans facteur commun.Une transformation birationnelledu plan projectif complexe dans lui-même est une trans-formation rationnelle qui admet un inverse rationnel.
EXEMPLES 1.5. – Un automorphisme deP2(C), i.e. un élément de PGL3(C), estune transformation birationnelle.
– Tout automorphisme polynomial deC2 se prolonge en une transformation biration-nelle du plan projectif complexe ; par exemple on a dans le casdes automorphismesélémentaires
P2(C) 99K P2(C), (x : y : z) 7→ (αxzn−1 +znP
(yz
): βyzn−1 + γzn : zn)
où α, β, γ sont des éléments deC tels queαβ 6= 0 et P un polynôme deC[y] dedegrén, alors que dans le cas des automorphismes de HÉNON généralisé on a
P2(C) 99K P2(C), (x : y : z) 7→ (yzn−1 : znP
(yz
)−δxzn−1 : zn),
où δ désigne un complexe non nul etP un polynôme de degré supérieur ou égal à 2.

8 1. GROUPE DES AUTOMORPHISMES POLYNOMIAUX DEC2 ET GROUPE DE CREMONA
– La transformation
σ : P2(C) 99K P2(C), (x : y : z) 7→ (yz: xz: xy)
est rationnelle ; elle s’écrit aussi(
1x : 1
y : 1z
). On remarque en particulier que c’est
une involution, elle est donc birationnelle.
On désigne par Bir(P2) le groupe des transformations birationnelles du plan projectif danslui-mêmeencore appelégroupe deCREMONA ; les éléments de Bir(P2) s’appellent aussitransformations deCREMONA.Le groupe Aut(P2(C)) des automorphismes deP2(C) est un sous-groupe de Bir(P2), demême que Aut[C2].Une transformation birationnelle
f : P2(C) 99K P2(C), (x : y : z) 7→ ( f0(x,y,z) : f1(x,y,z) : f2(x,y,z))
a unensemble d’indéterminationInd f défini par les zéros communs desfi , on dit aussi quece sont lespoints éclatéspar f . Elle possède aussi unensemble exceptionnelExc f dontles composantes sont lescourbes contractéespar f ; c’est « l’image » parf−1 de Indf−1.Lorsquef est birationnelle, Excf est le lieu des zéros de det jacf .
EXEMPLES 1.6. – Si f est un automorphisme deP2(C), alors f est du type
(x : y : z) 7→ (a0x+b0y+c0z : a1x+b1y+c1z : a2x+b2y+c2z)
avec
∣∣∣∣∣∣
a0 b0 c0
a1 b1 c1
a2 b2 c2
∣∣∣∣∣∣6= 0 et Indf = Exc f = /0.
– Soit f : P2(C) 99K P2(C) le prolongement d’un automorphisme élémentaire àP2(C)
(x : y : z) 7→ (αxzn−1 +znP
(yz
): βyzn−1 + γzn : zn),
avecα, β, γ ∈C, αβ 6= 0, P∈ C[y], degP = n, alors
Exc f = z= 0 et Ind f = (1 : 0 : 0).De même le prolongement d’un automorphisme de HÉNON généralisé àP2(C) contracteune unique droite et éclate un seul point situé sur cette droite.
– Considérons l’involutionσ : P2(C) 99K P2(C), (x : y : z) 7→ (yz: xz: xy). On remarqueque
Indσ = (1 : 0 : 0), (0 : 1 : 0), (0 : 0 : 1)et Excσ = x= 0∪y= 0∪z= 0. Plus précisémentσ contracte la droite d’équa-tion x = 0 (resp.y = 0, respz = 0) sur le point(1 : 0 : 0) (resp.(0 : 1 : 0), resp.(0 : 0 : 1)). Puisqueσ est une involutionσ éclate le point(1 : 0 : 0) (resp.(0 : 1 : 0),resp.(0 : 0 : 1)) sur la droitex = 0 (resp.y = 0, resp.z= 0).

2. GROUPE DES TRANSFORMATIONS BIRATIONNELLES 9
L’application d’éclatementen un point est un exemple de transformation birationnelle.SoientZ une surface etp un point deZ . Il existe une surfaceZ et un morphismeπ : Z → Ztels que
– E= π−1(p) soit isomorphe àP1(C);– la restrictionπ|Z \E : Z \E→ Z \p deπ à Z \E soit un isomorphisme.
À isomorphisme prèsZ et π sont uniques. On dit queπ est l’application d’éclatement enpet Z est l’éclaté deZ en p. On dit aussi qu’on passe deZ à Z en éclatant le pointp et qu’onpasse deZ à Z en contractant la courbe E. La courbe rationnelle E est appeléediviseurexceptionnel.Une présentation concrète de l’éclatement deC2 en 0 est la suivante : on considère
Γ = ((x,y), [ξ : η]) ∈ C2×P1(C) |xη = yξavec la projectionπ sur le premier facteur ; le couple(Γ,π) est l’éclatement deC2 en 0.Notons queπ−1 : C2 \ 0 → Γ est l’application définie parπ−1(x,y) = ((x,y), [x : y]); onpeut aussi écrire
π−1(x,y) = ((x,y), [1 : y/x]) = ((x,y), [x/y : 1]).
Ces deux représentations permettent de définir des cartesU ′ = C2s,η et U ′′ = C2
ξ,t où lescoordonnées sont définies à l’aide deπ
π′ : (s,η) 7→ (s,sη) = (x,y), π′′ : (ξ, t) 7→ (ξt, t) = (x,y).
Par suiteΓ = U ′∪U ′′ et E′ = E∩U ′ = s= 0 est équivalent àC. Dans l’éclaté la trans-formée stricte (voir Chapitre 2) dex = 0 (resp.y = 0) dansΓ est donnée parξ = 0(resp.η = 0) ; il s’en suit qu’on utilise le système de coordonnées(ξ, t) (resp.(s,η)) sion veut travailler au voisinage dex = 0 (resp.y = 0).Il existe un théorème de génération pour Bir(P2).
THÉORÈME 1.7 ([Cas01, Noe69, Noe70, Noe72]). Le groupe deCREMONA est en-gendré parσ etAut(P2(C)).
On peut reformuler cet énoncé d’une autre façon ; avant remarquons que les transformationsbirationnelles d’une surfaceZ dans elle-même forment un groupe que l’on note Bir(Z ).
THÉORÈME 1.8 ([Isk85]). Considérons le groupeBir(P1(C)×P1(C)) des transfor-mations birationnelles deP1(C)×P1(C) dans lui-même,π : P1(C)×P1(C)→ P1(C) laprojection sur le premier facteur etτ : (u,v) 7→ (v,u). Le groupeBir(P1(C)×P1(C)) estengendré parτ et le groupe des transformations qui préservent la fibrationπ.
Contrairement à Aut[C2] le groupe Bir(P2) n’est pas le produit amalgamé de deux groupesle long de leur intersection ([Wri92 ]). Les techniques utilisées pour décrire ces deux groupessont donc essentiellement différentes.

10 1. GROUPE DES AUTOMORPHISMES POLYNOMIAUX DEC2 ET GROUPE DE CREMONA
Il y a une notion de premier degré dynamique sur Bir(P2) qui prolonge la notion définiesur Aut[C2]. Si f : P2(C) 99K P2(C), (x : y : z) 7→ ( f0(x,y,z) : f1(x,y,z) : f2(x,y,z)) désigneune transformation birationnelle, ledegré algébriquede f est par définition égal au degrédes fi. Quant audegré dynamiqueil est donné par la même définition, à savoir par
λ( f ) = limn→+∞
(degf n)1/n.
Soit f dans Bir(P2); la transformationf est ditealgébriquement stables’il n’existe pasde courbeC dansP2(C) telle que f k(C ) appartienne à Indf pour un certain entierk≥ 0.Autrement dit une transformation est algébriquement stable si la situation suivante n’arrivepas
. . ... . .fffff
C
Les deux conditions qui suivent sont équivalentes ([DF01])
– il n’existe pas de courbeC dansP2(C) telle que f k(C ) appartienne à Indf pour uncertain entierk≥ 0;
– pour tout entiern on a degf n = (degf )n.
EXEMPLES 1.9. – Un automorphisme deP2(C) est algébriquement stable.– L’involution σ : P2(C) 99K P2(C), (x : y : z) 7→ (yz: xz: xy) n’est pas algébriquement
stable : siC appartient à Excσ alorsσ(C ) est un point de Indσ; par ailleurs degσ2 = 1alors que(degσ)2 = 4.
– SiA est un élément « générique » de Aut(P2(C)), alorsAσ est algébriquement stable([CD]).
D’après DILLER et FAVRE toute transformation birationnelle sur une surface complexecompacte est algébriquement stable modulo conjugaison birationnelle.
PROPOSITION1.10 ([DF01]). Soit f : Z 99K Z une transformation birationnelle sur unesurface complexe compacteZ . Il existe une suite d’éclatementsπ : X → Z telle queπ−1 f πsoit algébriquement stable.
Idée de démonstration.Raisonnons par l’absurde,i.e. supposons quef ne soit pas al-gébriquement stable ; il existe alors une courbeC et un entierk tels que

2. GROUPE DES TRANSFORMATIONS BIRATIONNELLES 11
. . ... . .
C
p1 p2 pk−1 pk
L’idée mise en œuvre par DILLER et FAVRE est la suivante : quitte à éclater lespi l’imagedeC est, pouri = 1, . . . , k, une courbe. En renouvelant un nombre fini de fois cette opérationon obtient le résultat annoncé.
Lorsquef est une transformation de CREMONA algébriquement stable, on aλ( f ) = degf .
Nous allons voir que pour Bir(P2) il n’y a pas d’analogue à la dichotomie automorphismede HÉNON/automorphisme élémentaire. Pour ce faire introduisons lafamille de transfor-mations birationnelles( fα,β) donnée par
P2(C) 99K P2(C), (x : y : z) 7→ ((αx+y)z : βy(x+z) : z(x+z)), α, β ∈ C∗
soit dans la carte affinez= 1
fα,β(x,y) =
(αx+yx+1
,βy
).
THÉORÈME1.11 ([Dés08]). Le premier degré dynamique defα,β vaut1; plus précisé-mentdegf n
α,β ∼ n.
Supposons queα et β soient de module1 et génériques. Sig commute àfα,β, alorsg estune puissance defα,β; en particulier, le centralisateur defα,β est dénombrable.Les élémentsf 2
α,β possèdent deux points fixesm1, m2 et
– il existe un voisinageV1 dem1 sur lequelfα,β est conjugué à(αx,βy); en particulierl’adhérence de l’orbite d’un point deV1 sous l’action defα,β est un tore de dimen-sion2;
– il existe un voisinageV2 dem2 tel que la dynamique def 2α,β soit localement linéaire
surV2; l’adhérence de l’orbite générique d’un point deV2 sous l’action def 2α,β est
un cercle.
Supposons que|β| = 1; dans la carte affine(x,y) les fα,β laissent les 3-variétés|y| = cteinvariantes. Les orbites présentées sont bornées dans unR2× S1. La dynamique se passeessentiellement en dimension 3, différentes projections permettent d’avoir une bonne re-présentation de l’orbite d’un point. Dans la carte affinez= 1 on désigne parp1 et p2 lesdeux projections standards. Les figures que nous proposons sont des représentations (enperspective) des projections suivantes.

12 1. GROUPE DES AUTOMORPHISMES POLYNOMIAUX DEC2 ET GROUPE DE CREMONA
– On considère d’abord l’ensemble
Ω1(m,α,β) = (p1( f nα,β(m)), Im(p2( f n
α,β(m)))) |n = 1..30000;
cet ensemble est contenu dans le produit deR2 par un intervalle. L’orbite d’un pointsous l’action defα,β est comprimée par le revêtement double(x,ρeiθ)→ (x,ρsinθ).
– De même on introduit
Ω2(m,α,β) = (Re(p1( f nα,β(m))), p2( f n
α,β(m))) |n = 1..30000
qui est inclus dans un cylindreR× S1; cette seconde projection montre comment« décomprimer »Ω1 pour avoir l’allure de l’orbite.
On suppose queα = exp(2i√
3) et β = exp(2i√
2) et on noteΩi(m) au lieu deΩi(m,α,β).Les figures qui suivent illustrent très bien le Théorème 1.11.
Ω1(10−4i,10−4i) Ω2(10−4i,10−4i)
Il s’agit de l’orbite d’un point situé dans la zone de linéarisation du point(0 : 0 : 1); onobserve que l’adhérence d’une orbite est un tore.
Ω1(10000+10−4i,10000+10−4i) Ω2(10000+10−4i,10000+10−4i)
C’est « l’orbite » sous l’action def 2α,β d’un point dans la zone de linéarisation du point
(0 : 1 : 0); ici l’adhérence d’une « orbite » est un cercle topologique.Les singularités sontdes artéfacts de projection.
REMARQUE 1.12. La droitez= 0 est contractée parfα,β sur(0 : 1 : 0) lui-même éclatésur z = 0 : la transformationfα,β n’est pas algébriquement stable ; c’est pour cette raisonque l’on a considéréf 2
α,β et non fα,β.
2. GROUPE DES TRANSFORMATIONS BIRATIONNELLES 13
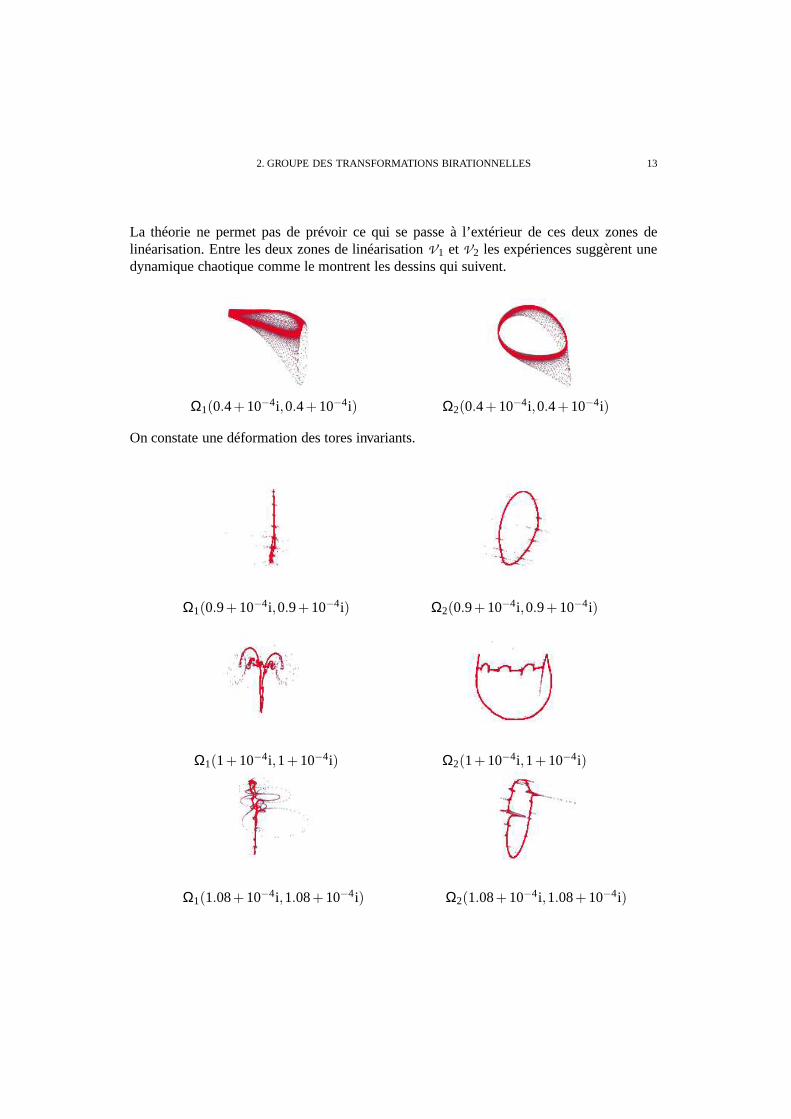
La théorie ne permet pas de prévoir ce qui se passe à l’extérieur de ces deux zones delinéarisation. Entre les deux zones de linéarisationV1 etV2 les expériences suggèrent unedynamique chaotique comme le montrent les dessins qui suivent.
Ω1(0.4+10−4i,0.4+10−4i) Ω2(0.4+10−4i,0.4+10−4i)
On constate une déformation des tores invariants.
Ω1(0.9+10−4i,0.9+10−4i) Ω2(0.9+10−4i,0.9+10−4i)
Ω1(1+10−4i,1+10−4i) Ω2(1+10−4i,1+10−4i)
Ω1(1.08+10−4i,1.08+10−4i) Ω2(1.08+10−4i,1.08+10−4i)

14 1. GROUPE DES AUTOMORPHISMES POLYNOMIAUX DEC2 ET GROUPE DE CREMONA
Manifestement les tores invariants ont disparu. Toutefoisla figure semble s’organiser autourd’une courbe fermée.
Si, contrairement au cadre des automorphismes polynomiauxdeC2, on n’a pas d’équiva-lence entre premier degré dynamique strictement supérieurà 1 et centralisateur non dénom-brable on a néanmoins une implication. Plus précisément on al’énoncé suivant.
THÉORÈME 1.13 ([Can]). Soit f une transformation birationnelle du plan projectifcomplexe dont le premier degré dynamiqueλ( f ) est strictement plus grand que1. Si g estun élément deBir(P2) qui commute avecf , il existe deux entiersmdansN∗ etn dansZ telsquegm = f n.
Étant donnée une transformation birationnellef , DILLER et FAVRE ont étudié le compor-tement de(degf n)n et donné des propriétés dans chacun des cas possibles.
THÉORÈME1.14 ([DF01]). Une transformation birationnelle deP2(C) satisfait, à conju-gaison birationnelle près, une et une seule des propriétés suivantes.
– La suite(degf n)n est bornée,f est un automorphisme d’une surface rationnelleZ etun itéré def appartient àAut0(Z ), la composante neutre deAut(Z ).
– degf n∼ n alors f n’est pas un automorphisme etf préserve une unique fibration quiest rationnelle.
– degf n ∼ n2 auquel casf est un automorphisme préservant une unique fibration quiest elliptique.
– degf n∼ αn, α > 1.
Dans les trois premières éventualité on aλ( f ) = 1, dans le dernièreα = λ( f ) > 1.
EXEMPLES 1.15. – Si f est un automorphisme deP2(C), alors degf n = 1 pourtout n. Toute transformation birationnellef d’ordre fini satisfait :(degf n)n est bor-née.
– La transformationf = (xz: xy : z2) vérifie degf n∼ n (se placer dans la cartez= 1).
– Le prolongementf d’un automorphisme de HÉNON généralisé(y,P(y)−δx), avecPdansC[y] tel que degP≥ 2 etδ dansC∗, a une croissance des degrés exponentielle,i.e.degf n = (degP)n.
– Soit fM l’élément de Bir(P2) défini dans la cartez= 1 par
fM = (xayb,xcyd) avec M =
[a bc d
]∈ SL2(Z).
On a l’alternative
– ou bien|trM| ≤ 2 etλ( fM) = 1;
2. GROUPE DES TRANSFORMATIONS BIRATIONNELLES 15
– ou bienM a pour valeurs propres réellesλ etλ−1 avecλ−1 < 1< λ etλ( fM) =λ.
Par suite(degf nM)n est bornée (resp. degf n
M ∼ n, resp. degf nM ∼ n2, resp. degf n
M ∼ λ( fM)n)si et seulement siM est elliptique (resp. parabolique, resp. parabolique, resp. hyper-bolique).
Unevariété kählérienne Mest une variété hermitienneM (i.e. une variété complexe munied’une métrique hermitienneh) telle que la 2-formeω =−imh soit fermée.
EXEMPLES 1.16. – Puisque toute sous-variété d’une variété kählérienne est käh-lérienne et que la métrique de Fubini-Study surPn(C) est kählérienne toute variétéalgébrique projective est kählérienne.
– SoitΛ un réseau dansCn; le toreCn/Λ est une variété kählérienne.– Toute surface de Riemann est kählérienne.
Les notions de premier degré dynamique, de stabilité algébrique et le Théorème 1.14 segénéralisent au contexte suivant : les transformations biméromorphes sur des surfaces com-pactes kählériennes. Une transformation rationnellef sur une surface complexe compactekählérienneZ définit un opérateur linéairef ∗ sur les groupes de cohomologie deZ préser-vant la décomposition de HODGE Hk(Z ,C) =
M
i+ j=k
Hi, j(Z ,C). On définit lepremier degré
dynamiquede f par
λ( f ) = limn→+∞
||( f n)∗||1/n
où || · || désigne une norme sur End(H1,1(Z ,R)); toujours d’après [DF01] cette quantité estun invariant birationnel. Elle coïncide sur le plan projectif complexe avec la notion déjàintroduite.


CHAPITRE 2
Un peu de géométrie algébrique
1. Quelques définitions et propriétés
SoientX etZ deux surfaces complexes compactes. Une application méromorphe f : X 99K
Z est définie par son grapheΓ( f )⊂ X ×Z ; ce graphe est une sous-variété irréductible pourlaquelle la projectionπ1 : Γ( f )→ X sur le premier facteur est unemodification propre, i.e.une application holomorphe surjective propre dont la fibre générique est un point ([Fis76]).Le lieu d’indéterminationde f est l’ensemble fini de points oùπ1 n’admet pas d’inverselocal. L’application f estdominantesi la seconde projectionπ2 : Γ( f )→ Z est surjective.L’ ensemble critiquede f est l’image parπ1 du lieu critique deπ2; on le noteraC ( f ). No-tons Excπ2 l’ensemble des points oùπ2 n’est pas une application finie ; on définit l’ensembleexceptionnelde f par Excf = π1(Excπ2) ⊂ C ( f ). Soient f : X 99K Y , g: Y 99K Z deuxapplications méromorphes dominantes ; le grapheΓ(g f ) deg f est l’adhérence de
(x,g( f (x))) ∈ X ×Z |x 6∈ Ind f , f (x) 6∈ Indg;ce sous-ensemble coïncide avec
Γ(g)Γ( f ) = (x,z) ∈ X ×Z |∃y∈ Y , (x,y) ∈ Γ( f ), (y,z) ∈ Γ(g)si et seulement si ce dernier est irréductible.
PROPOSITION2.1 ([DF01]). Soientf : X 99K Y , g: Y 99K Z deux applications méromor-phes dominantes entre deux surfaces complexes compactes ;Γ(g) Γ( f ) est irréductible siet seulement s’il n’existe pas de composanteV dansExc f telle que f (V ) appartienne àIndg.
La transformationf estalgébriquement stablesi et seulement siΓ( f ) Γ( f n) = Γ( f f n)pour toutn dansN.
Soit f : X 99K Z une application méromorphe dominante entre deux surfaces complexescompactes,Γ une désingularisation de son graphe etπ1, π2 les deux projections naturelles.Une forme lisseα ∈ C ∞
p,q(Z ) de bidegré(p,q) peut être tirée en arrière comme une formelisseπ∗2α ∈ C ∞
p,q(Γ) et poussée en avant comme un courant. Siα ∈ Hp,q(Z ) est la classede Dolbeault d’une forme lisseα on définit f ∗α par f ∗α := π1∗π∗2α ∈Hp,q(X ) d’où
17

18 2. UN PEU DE GÉOMÉTRIE ALGÉBRIQUE
l’application linéairef ∗ : Hp,q(Z )→ Hp,q(X ). De la même façon on peut définir
f∗ = π2∗π∗1 : Hp,q(X )→ Hp,q(Z ).
SoientZ une surface etπ : Z → Z l’application d’éclatement d’un pointp deZ . Si C estune courbe deZ passant parp on désigne parC = π−1(C \p) la transformée strictedeC ;la transformée totaledeC est le diviseurπ∗C . Remarquons que siC est lisse enp on a
π∗C = C +E.
Un diviseur E sur Z est une combinaison linéaire du type∑ciCi , les Ci désignant descourbes irréductibles éventuellement singulières deZ et lesci des entiers relatifs. Les di-viseursD′ et D′′ sont linéairement équivalents, D′ ∼ D′′, si D′−D′′ est le diviseur d’unefonction rationnelleR, autrement dit siD′−D′′ coïncide avec le lieu des zéros (avec multi-plicité) deR privé de l’ensemble des pôles deR.Le groupe dePICARD deZ , noté Pic(Z ), est le groupe quotient des diviseurs modulo équi-valence linéaire. On a : Pic(P2(C)) ≃ Z. Soient H la classe d’une droite dans Pic(P2(C))etC la classe d’une courbe de degréd; on constate queC ∼ dH.La surfaceZ est munie d’une forme d’intersection : siD et D′ sont deux courbes dis-tinctes,D ·D′ correspond au nombre de points d’intersection de ces courbes comptés avecmultiplicité ; on remarque que dans ce casD ·D′ est positif ou nul. On peut étendre naturel-lement cette définition pour donner un sens à l’intersectionde deux diviseurs quelconques ;un cas particulier est l’auto-intersection, on désigne alors D ·D parD2. Le nombre d’inter-section vérifie les propriétés suivantes
– siD′ ∼D′′ alorsD ·D′ = D ·D′′;– π∗D ·π∗D′ = D ·D′;– E·π∗D = 0;– E2 =−1;– C 2 = C 2−1.
Soientπ : BlpP2→ P2(C) l’éclatement deP2(C) au pointp et E= π−1(p) la fibre excep-
tionnelle. Notons Rat(S) l’ensemble des fonctions rationnelles sur S; on a :
Rat(BlpP2) = π∗(Rat(P2)).
Le groupe Pic(BlpP2) est engendré par E etL où L = ℓ = 0 désigne une droite ne passant
pas parp et L = π∗L = ℓπ = 0 le pull-back de L.Plus généralement soientZ une variété complexe obtenue en éclatant le plan projectif com-plexe enN points distinctsp1, . . . , pN et π la composition de ces différents éclatements.Posons HZ = π∗H, H désignant une droite. Si H ne contient aucun despi, alors HZ estreprésenté par la transformée stricteH de H. Notons Ej = π−1(p j) la classe dans Pic(Z ) de
1. QUELQUES DÉFINITIONS ET PROPRIÉTÉS 19
la fibre exceptionnelle obtenue en éclatantpi . En général si H est une droite deP2(C), alorsHZ = H+ ∑
j|pj∈H
E j . Dans ce cas on peut décrire Pic(Z ).
THÉORÈME 2.2. Soient p1, . . . , pN des points distincts deP2(C). Notonsπ : Z →P2(C) la suite d’éclatements despi . Si E j = π−1(p j) désignent les fibres exceptionnelles etH une droite générique deP2(C), alors
Pic(Z ) = ZE1⊕ . . .⊕ZEN⊕Zπ∗H.
Rappelons ce que sont lessurfaces deHIRZEBRUCH Fn. Posons F0 = P1(C)×P1(C). Lasurface F1 est obtenue en éclatant le plan projectif complexe en(1 : 0 : 0); cette surfaceest un compactifié deC2 naturellement muni d’une fibration rationnelle correspondant auxdroitesy= cte. Le diviseur à l’infini est constitué de deux courbes rationnelles s’intersectanttransversalement en un point. On a
– la transformée stricte de la droite à l’infini dansP2(C) qui est une droite ;
– le diviseur exceptionnel de l’éclatement qui est une section pour la fibration.Plus généralement Fn est, pour toutn≥ 1, un compactifié deC2 muni d’une fibration ration-nelle telle que le diviseur à l’infini soit constitué de deux courbes rationnelles transverses,une fibref et une sectionsn d’auto-intersection−n
Fn = PP1(C)(OP1(C)(1)⊕OP1(C)(n)), n≥ 2.
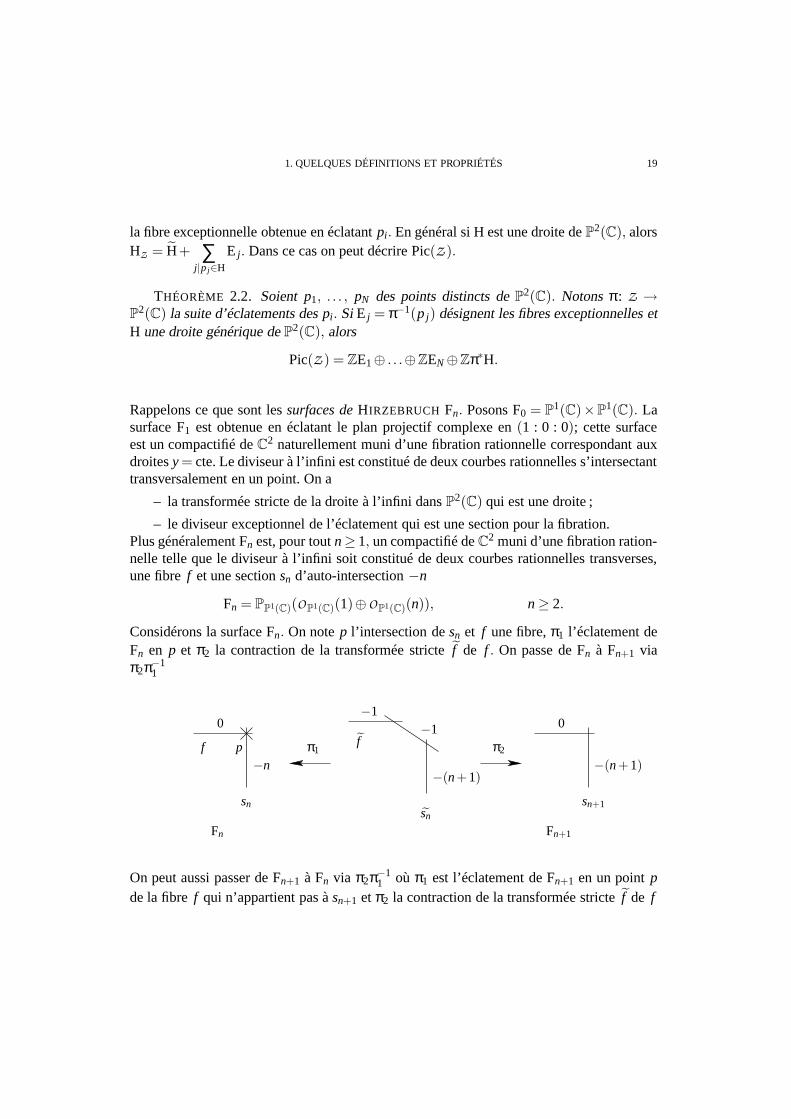
Considérons la surface Fn. On notep l’intersection desn et f une fibre,π1 l’éclatement deFn en p et π2 la contraction de la transformée strictef de f . On passe de Fn à Fn+1 viaπ2π−1
1
sn+1
−(n+1)
0
π2
−(n+1)
sn
−1−1
fπ1
sn
−np
0
f
Fn+1Fn
On peut aussi passer de Fn+1 à Fn via π2π−11 où π1 est l’éclatement de Fn+1 en un pointp
de la fibref qui n’appartient pas àsn+1 et π2 la contraction de la transformée strictef de f
20 2. UN PEU DE GÉOMÉTRIE ALGÉBRIQUE
snsn+1
−(n+1)
π2f
0−1−1
π1
−(n+1)
sn+1
p
0
f
FnFn+1
−n
Dans ces deux éventualités on dit queπ2π−11 est unetransformation élémentaireen p.
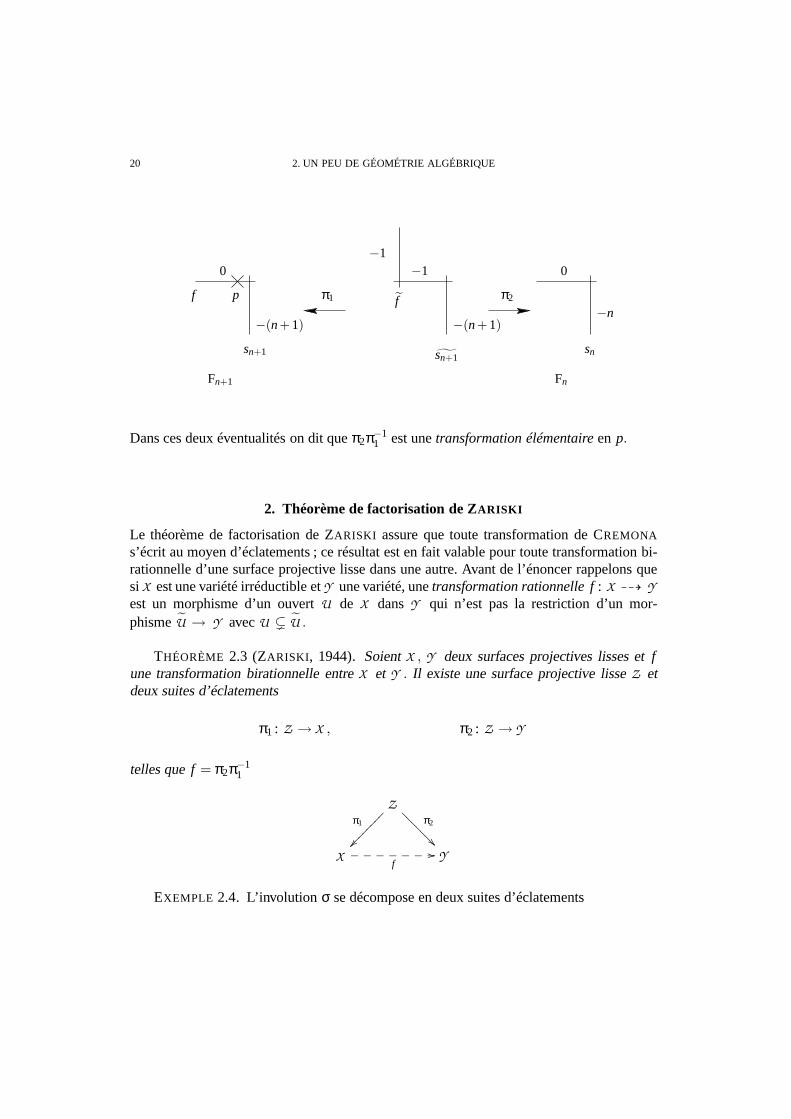
2. Théorème de factorisation de ZARISKI
Le théorème de factorisation de ZARISKI assure que toute transformation de CREMONA
s’écrit au moyen d’éclatements ; ce résultat est en fait valable pour toute transformation bi-rationnelle d’une surface projective lisse dans une autre.Avant de l’énoncer rappelons quesiX est une variété irréductible etY une variété, unetransformation rationnelle f: X 99K Yest un morphisme d’un ouvertU de X dansY qui n’est pas la restriction d’un mor-phismeU → Y avecU ( U .
THÉORÈME 2.3 (ZARISKI, 1944). SoientX , Y deux surfaces projectives lisses etfune transformation birationnelle entreX et Y . Il existe une surface projective lisseZ etdeux suites d’éclatements
π1 : Z → X , π2 : Z → Y
telles quef = π2π−11
Zπ1
π2
??
????
?
Xf
//_______ Y
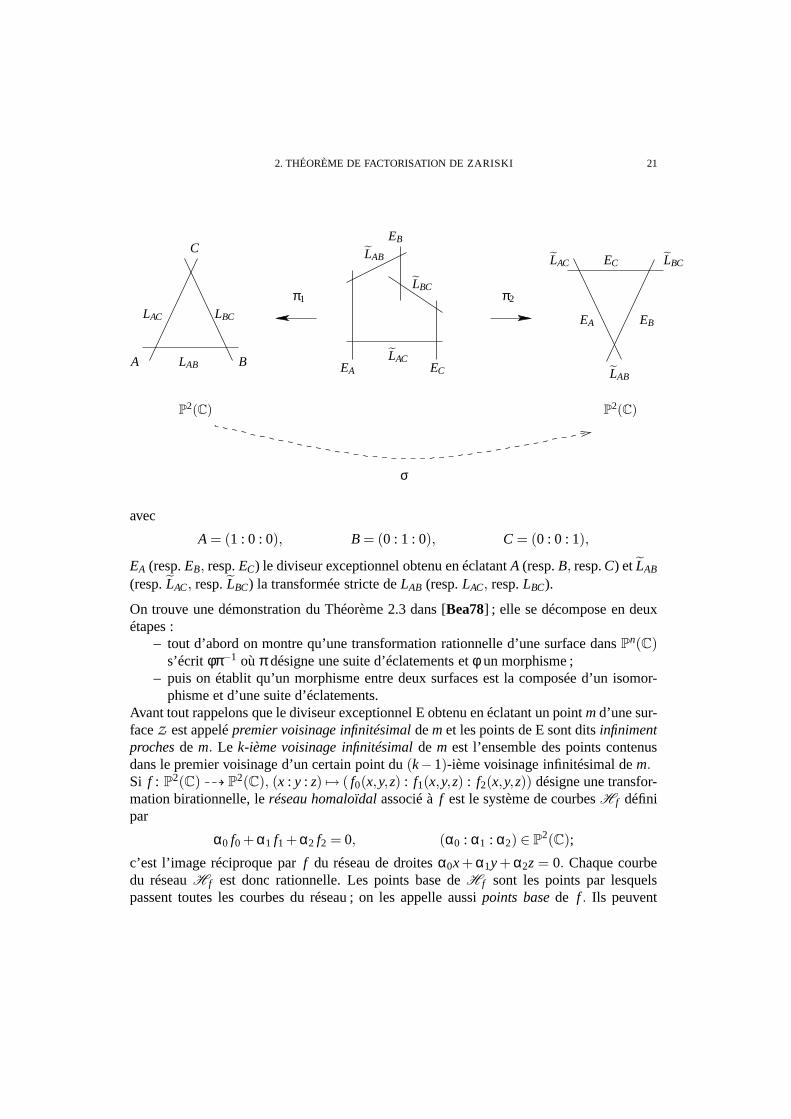
EXEMPLE 2.4. L’involution σ se décompose en deux suites d’éclatements
2. THÉORÈME DE FACTORISATION DE ZARISKI 21
P2(C)
LAB
EBEA
ECLAC LBC
LBC
LACEA
EB
LAB
P2(C)
C
LAC
LABA B
σ
LBC
π1 π2
EC
avec
A = (1 : 0 : 0), B = (0 : 1 : 0), C = (0 : 0 : 1),
EA (resp.EB, resp.EC) le diviseur exceptionnel obtenu en éclatantA (resp.B, resp.C) et LAB
(resp.LAC, resp.LBC) la transformée stricte deLAB (resp.LAC, resp.LBC).
On trouve une démonstration du Théorème 2.3 dans [Bea78] ; elle se décompose en deuxétapes :
– tout d’abord on montre qu’une transformation rationnelled’une surface dansPn(C)s’écrit φπ−1 où π désigne une suite d’éclatements etφ un morphisme ;
– puis on établit qu’un morphisme entre deux surfaces est la composée d’un isomor-phisme et d’une suite d’éclatements.
Avant tout rappelons que le diviseur exceptionnel E obtenu en éclatant un pointmd’une sur-faceZ est appelépremier voisinage infinitésimaldemet les points de E sont ditsinfinimentprochesde m. Le k-ième voisinage infinitésimalde m est l’ensemble des points contenusdans le premier voisinage d’un certain point du(k−1)-ième voisinage infinitésimal dem.Si f : P2(C) 99K P2(C), (x : y : z) 7→ ( f0(x,y,z) : f1(x,y,z) : f2(x,y,z)) désigne une transfor-mation birationnelle, leréseau homaloïdalassocié àf est le système de courbesH f définipar
α0 f0 + α1 f1 + α2 f2 = 0, (α0 : α1 : α2) ∈ P2(C);
c’est l’image réciproque parf du réseau de droitesα0x+ α1y+ α2z = 0. Chaque courbedu réseauH f est donc rationnelle. Les points base deH f sont les points par lesquelspassent toutes les courbes du réseau ; on les appelle aussipoints basede f . Ils peuvent

22 2. UN PEU DE GÉOMÉTRIE ALGÉBRIQUE
être dansP2(C) ou infiniment proches deP2(C); dès que l’un de ces points n’est pas dansP2(C), i.e. n’est paspropre, il appartient à unk-ième voisinage infinitésimal d’un pointbase.
3. Matrices caractéristiques
Soit f une transformation birationnelle deP2(C) dans lui-même de degréν. D’après leThéorème 2.3 il existeπ et η deux suites d’éclatements telles que
Zπ
||zzzz
zzzz η
""DDDD
DDDD
P2(C)f
//_______ P2(C)
On peut écrireπ sous la forme
π : Z = Z kπk→ Z k−1
πk−1→ . . .π2→ Z1
π1→ Z0 = P2(C)
où πi est l’éclatement d’un pointpi−1 de Z i−1; de même, pourj = 1, . . . , k, il existeη j : X j → X j−1 éclatement du pointp′j−1 deX j−1 tels que
η : Z = Xkηk→ Xk−1
ηk−1→ . . .η2→ X1
η1→ X0 = P2(C).
Notons E1, . . . , Ek (resp. E′1, . . . , E′k) les diviseurs exceptionnels obtenus en éclatantp1, . . . , pk
(resp.p′1, . . . , p′k). Unerésolution ordonnéede f est une décompositionf = ηπ−1 oùη etπsont des suites d’éclatements ordonnées. La donnée d’une résolution ordonnée def définitdeux bases de Pic(Z )
– B = e0 = π∗H, e1 = E1, . . . , ek = Ek;– B ′ = e′0 = η∗H, e′1 = E′1, . . . , e′k = E′k.
On peut écrire lese′i de la façon suivante
e′0 = νe0−k
∑i=1
miei , e′j = ν je0−k
∑i=1
mi j ei , j ≥ 1.
La matrice de changement de bases
M =
ν ν1 . . . νk
−m1 −m11 . . . −m1k...
......
−mk −mk1 . . . −mkk
est appeléematrice caractéristiquede f . La première colonne de la matriceM est le vecteur(ν,−m1, . . . ,−mk), vecteur caractéristique def . Les autres colonnes(νi ,−m1i , . . . ,−mki)

4. DIMENSION DE KODAIRA 23
décrivent le « comportement de E′i » : si ν j > 0, alorsπ(E′j) est une courbe dansP2(C) dedegréν j passant par les points basexℓ de f avec multiplicitémℓ j .Notons que siZ domineP2(C) on peut identifier H2(Z ,Z) et Pic(Z ) ce que nous feronspar la suite.
4. Dimension de KODAIRA
SoitM une variété complexe compacte. SiL est un fibré en droites holomorphe surM ,on désigne par H0(M ,L) le C-espace vectoriel constitué des sections holomorphes glo-bales deL. La dimension de H0(M ,L) est finie. Soientx un point deM et Lx la fibredeL en ce point ; l’évaluation des sections deL au pointx détermine une application linéai-re ΘLx : H0(M ,L)→ Lx. Lorsque toutes les sections globales deL s’annulent enx, l’appli-cationΘLx est identiquement nulle etx est un point base deL. Étant donné un isomorphismedeLx avecC, l’application ΘLx s’interprète comme une forme linéaire ; elle ne dépend duchoix de l’isomorphisme que par un facteur multiplicatif. Ainsi pour tout pointx deM quin’est pas un point base deL on obtient un élément[ΘLx] deP(H0(M ,L)∗). Pour les fibrésen droites possédant au moins une section non nulle on a une application méromorphe
ΘL : M 99K P(H0(M ,L)∗)
telle que IndΘL soit contenu dans l’ensemble des points base deL. On peut répéter cetteconstruction en remplaçantL par L⊗ℓ où ℓ désigne un entier. On définit ladimension deKODAIRA-I ITAKA deL par
kod(M ,L) = maxℓ>0
dimC(ΘL⊗ℓ(M ))
avec la convention suivante : si aucune puissance strictement positive deL ne possède desection non nulle, on pose kod(M ,L) = −∞. La dimension deKODAIRA deM , notéekodM , est la dimension de KODAIRA-I ITAKA du fibré canonique KM = det(T∗M ) deM .
Soit Z une surface complexe compacte kählérienne ; kodZ appartient à−∞, 0, 1, 2.Lorsque la dimension de KODAIRA deZ est positive ou nulle, le modèle minimalZ ′ deZ , i.e. la surface obtenue en contractant les éventuelles courbes d’auto-intersection−1 surZ , est unique ; de plus, les groupes Bir(Z ′), Bir(Z ) et Aut(Z ) coïncident ([BHPVdV04]).Avant de caractériser de telles surfacesZ rappelons quelques définitions.
Unesurface K3 est une surfaceZ complexe, compacte, simplement connexe, à fibré cano-nique trivial. En particulier il existe une 2-forme holomorpheω surZ qui ne s’annule pas ;ω est unique à multiplication près par un scalaire.
EXEMPLES 2.5. – Toute surface quartique lisse dansP3(C) est une surface K3.
– Tout revêtement double deP2(C) ramifié le long d’une courbe sextique lisse est unesurface K3.

24 2. UN PEU DE GÉOMÉTRIE ALGÉBRIQUE
SoitZ une surface K3 munie d’une involution holomorpheι. Lorsqueι est sans point fixe,le quotient est ce qu’on appelle unesurface deENRIQUES; sinon il s’agit d’une surfacerationnelle.Unesurface minimaleest une surface ne contenant aucune courbe rationnelle lisse d’auto-intersection−1. Les surfaces rationnelles minimales sontP2(C), P1(C)× P1(C) et Fn,n≥ 2 (voir [Bea78]).Nous pouvons maintenant passer à la description des surfaces complexes compactes kählé-riennes.
– Lorsque kodZ = −∞ il y a deux familles : la première constituée des surfaces bi-rationnelles àP2(C) (par exempleP2(C), P1(C)×P1(C), les surfaces de HIRZE-BRUCH) ; la seconde formée des surfaces réglées non rationnelles (par exemple lesfibrés enP1(C) au dessus d’une courbe de genreg≥ 1).
– Lorsque kodZ = 0 il y a aussi deux familles : celle constituée des toresC2/Γ et dessurfaces hyperelliptiques (surfaces revêtues par des tores à l’aide d’un morphismeétale) ; et enfin celle formée des surfaces K3 et surfaces de ENRIQUES.
– Lorsque kodZ = 1, alorsZ est une surface elliptique.– Lorsque kodZ = 2, alorsZ est une surface de type général (exemple : toute hyper-
surface lisse deP3(C) de degré supérieur ou égal à 5).

CHAPITRE 3
Un peu de dynamique
1. Linéarisation
Commençons par quelques rappels de linéarisation en dimension 1. Soit
f (z) = αz+a2z2 +a3z3 + . . . , α = e2iθ, θ ∈ R\Q.
On chercheh(z) = z+b2z2 + . . . tel que f h(z) = h(αz). Formellement
b2 =a2
α2−α, . . . , bn =
an +Qn
αn−αoù Qn ∈ Z[ai , i ≤ n−1, bi , i ≤ n];
on dit quef estformellement linéarisable.
THÉORÈME 3.1 (CREMER). Si lim inf |αq−α|1/q = 0, il existe un germe analytiquefnon linéarisable.Si lim inf |αq−α| 1
αq = 0 aucun germe polynomialf (z) = αz+a2z2 + . . .+zd n’est linéari-sable.
THÉORÈME3.2 (SIEGEL). S’il existe deux constantescetM strictement positives tellesque|αq−α| ≥ c
qM , tout germef (z) = αz+a2z2 + . . . est localement linéarisable.
Passons maintenant au cas de deux variables. Soitf (x,y) = (αx,βy)+ termes d’ordre su-périeur avecα, β de module 1, non racines de l’unité. On parle derésonancelorsqu’on ades relations de la formeα = αaβb ou β = αaβb où a, b désignent des entiers positifs telsquea+b≥ 2. Un monôme résonantest un monôme de la formexayb. Il y a une obstructionformelle à la linéarisation : la présence de monômes résonants. On dit queα etβ sontmulti-plicativement indépendantssi l’unique solution deαaβb = 1 aveca, b dansZ est la solutionnulle (0,0). On dit queα et β sontsimultanément diophantienss’il existe deux constantesstrictement positivesc etM telles que
min(|αaβb−α|, |αaβb−β|
)≥ c|a+b|M ∀a, b∈ N, a+b≥ 2.
THÉORÈME3.3. Si α et β sont simultanément diophantiens,f est linéarisable.Si α et β sont algébriques et multiplicativement indépendants, ilssont simultanément dio-phantiens.
On renvoie à [Her87] pour de plus amples détails sur les questions de linéarisation.
25

26 3. UN PEU DE DYNAMIQUE
2. Où chercher des automorphismes d’entropie positive ?
2.1. Entropie topologique. SoientX un espace métrique compact etf : X → X unetransformation continue. Soitε un nombre réel strictement positif. Pour tout entier positif n,on désigne parN(n,ε) le cardinal minimum d’une partieXn deX telle que pour tout pointydeX il existex dansX tel que
dist( f j(x), f j (y))≤ ε, ∀ 0≤ j ≤ n.
On introduit la quantitéhtop( f ,ε) définie par
htop( f ,ε) = limsupn→+∞
(1n
log(N(n,ε)))
.
L’ entropie topologiquede f est donnée par
htop( f ) = limε→0
htop( f ,ε);
cette définition ne dépend pas du choix de la distance.Soit f une transformationC ∞ sur une variété compacteM , on a l’inégalité
htop( f )≥ logr( f ∗),
i.e. l’entropie topologique est minorée par le logarithme du rayon spectral de l’applicationlinéaire induite parf sur H∗(M ,R), somme directe des groupes de cohomologie deM . Re-marquons que la majorationhtop( f )≥ logr( f ∗) est encore valable dans le cas méromorphe([DS04]). LorsqueM est kählérienne on a un résultat plus précis ; avant de l’énoncé in-troduisons la notation suivante : pour tout entierp compris entre 0 et dimCM on désignepar λp( f ) le rayon spectral de l’applicationf ∗ agissant sur le groupe de cohomologie deDolbeault Hp,p(M ,R).
THÉORÈME3.4 ([Gro03, Gro87, Yom87]). Soit f une transformation holomorphe surune variété complexe compacte kählérienneM . On a l’égalité
htop( f ) = max0≤p≤dimCM
logλp( f ).
REMARQUE 3.5. Le rayon spectral def ∗ est strictement plus grand que 1 si et seule-ment si l’un desλp( f ) l’est et, en fait, si et seulement siλ( f ) = λ1( f ) l’est. En d’autrestermes pour savoir sif est d’entropie positive il suffit de calculer la croissance de ( f n)∗αoùα est une forme de KÄHLER.
EXEMPLES 3.6. – SiM est une variété compacte kählérienne, tout élément de lacomposante connexe de l’identité de AutM est d’entropie nulle.
– L’entropie topologique d’un endomorphisme holomorphef de l’espace projectif estégale au logarithme du degré topologique def .
2. OÙ CHERCHER DES AUTOMORPHISMES D’ENTROPIE POSITIVE ? 27
– Contrairement à un automorphisme élémentaire, un automorphisme de HÉNON estd’entropie positive.
2.2. Un théorème de CANTAT . L’énoncé suivant répond à la question : où chercherdes automorphismes de surfaces complexes compactes d’entropie positive ?
THÉORÈME 3.7 ([Can99]). SoitZ une surface complexe compacte. Supposons queZpossède un automorphismef dont l’entropie topologique est positive. Alors
– ou bienkodZ = 0 et f est conjugué à un automorphisme de l’unique modèle minimaldeZ qui est un tore, une surface K3 ou une surface deENRIQUES;
– ou bienZ est rationnelle auquel casZ s’obtient en éclatantP2(C) en au moins10points (éventuellement proches) etf est birationnellement conjugué à un élément deBir(P2).
En particulierZ est une surface kählérienne.
EXEMPLES 3.8. – Commençons par un exemple dû à COBLE. Considérons unecourbe sextiqueC dansP2(C) avec 10 points doubles. Supposons queC soit choisiegénérique. SoitZ la surface obtenue en éclatant ces 10 points ; on l’appellesurfacede COBLE. La surfaceZ est le quotient d’une surface K3 par une involution ayantdes points fixes et les automorphismes deZ proviennent de ceux de la surface K3(voir [Cob61]).Le groupe Aut(Z ) s’identifie à un sous-groupe discret et de covolume fini de SO(1,9).Par suite c’est un groupe infini dénombrable contenant un groupe libre non abé-lien. On peut construire des automorphismes surZ de la façon suivante. Soitp unpoint double deC . L’ensemble des courbes de degré 6 passant par les 9 autres pointsdoubles constitue un pinceau de courbes de genre 1. Si on éclate ces 9 points on ob-tient une surfaceZ p sur laquelle les transformées strictes de ces courbes forment lesfibres d’une fibration elliptique singulièreπp : Z p→ P1(C). Remarquons que chacundes diviseurs exceptionnels coupe la fibre générique deπp en deux points. Considé-rons l’un de ces diviseurs que nous noterons E0. Soient E un autre diviseur etfl’automorphisme deZ p défini par
– simest un point d’une fibre lisse F deπp, l’image f (m) demest l’unique pointde F tel quef (m)+E∩F= m+E0∩F;
– cette transformation s’étend aux fibres singulières.On remarque queπp f = πp. En faisant varier le choix de E0 on obtient huit automor-phismes. Pour un choix générique deC ces automorphismes engendrent un groupeisomorphe àZ8. Chacun de ces automorphismes fixe la fibre singulière obtenuepartransformée stricte deC et fixe le point singulierp de cette fibre. Quitte à éclater cepoint les automorphismes construits se relèvent à la surface de COBLE Z . En faisantvarier p parmi les singularités deC on obtient 10 copies deZ8 dans Aut(Z ); pour

28 3. UN PEU DE DYNAMIQUE
un choix générique deC il n’y a pas de relation non triviale, autrement dit le produitlibre de 10 copies deZ8 se plonge dans Aut(Z ).
– On a l’énoncé suivant, dit théorème de TORELLI.
THÉORÈME3.9 ([BHPVdV04]). SoitZ une surface K3. Le morphisme
Aut(Z )→GL(H2(Z ,Z)), f 7→ f ∗
est injectif.Réciproquement supposons queF soit un élément deGL(H2(Z ,Z)) qui préserve laforme d’intersection surH2(Z ,Z) ainsi que la décomposition deHODGEdeH2(Z ,C)et le cône deKÄHLER de H2(Z ,R); alors il existe un automorphismef sur Z telque f ∗ = F.
– LorsqueZ est un toreC2/Γ l’énoncé est le même modulo le fait suivant : le noyaude
Aut(Z )→GL(H2(Z ,Z)), f 7→ f ∗
est engendré par les translations et l’involution(x,y) 7→ (−x,−y).
Le cas des surfaces K3 a été étudié par CANTAT et MCMULLEN ([Can01, McM02, Sil91,Wan95]) ; celui des surfaces rationnelles est celui qui produit leplus de tels automorphismes([McM07, BK06, BK09]) d’où l’intérêt qu’il suscite. Néanmoins on ne sait pas déterminerl’ensemble des surfaces rationnelles admettant des automorphismes non triviaux et étantdonnée une surface on est incapable de décrire ses automorphismes.
2.3. Cas des surfaces rationelles non minimales.Jusqu’à aujourd’hui on s’est essen-tiellement intéressés aux surfaces obtenues en éclatantP2(C) un nombre fini de points ; ceciest justifié par le théorème suivant dû à NAGATA .
THÉORÈME 3.10 ([Nag60]). SoientZ une surface rationnelle etf un automorphismesurZ tel quef∗ soit d’ordre infini. Il existe une suite d’applications d’éclatementπ j+1 : Z j+1→Z j d’un point p j deZ j telles queZ1 = P2(C), ZN+1 = Z .
Néanmoins remarquons qu’une surface obtenue en éclatantP2(C) en des points génériquesn’a pas d’automorphisme non trivial ([Hir88, Koi88 ]). De plus on a l’énoncé suivant quel’on peut par exemple trouver dans [Dil ].
PROPOSITION3.11. SoientZ une surface obtenue en éclatantP2(C) en n≤ 9 pointset f un automorphisme surZ . L’entropie topologiquelogλ( f ) de f est nulle. De plus, sinest inférieur ou égal à8, un itéré def est birationnellement conjugué à un automorphismedu plan projectif complexe.

4. TROIS INVOLUTIONS 29
Démonstration.Raisonnons par l’absurde : supposons quef soit d’entropie positive.D’après [Can99] il existeθ dans H2(Z ,R) d’auto-intersection nulle et tel quef ∗θ = λ( f )θ.Si KZ désigne la classe du diviseur canonique surZ , on a f∗KZ = f ∗KZ = KZ . On constateque
λ( f )−1〈θ,KZ 〉= 〈 f ∗θ,KZ 〉= 〈θ, f∗KZ 〉= 〈θ,KZ 〉d’où 〈θ,KZ 〉= 0. Comme la forme d’intersection surZ a une unique valeur propre positiveet comme K2Z ≥ 0 pourn≤ 9, la classeθ s’écritcKZ pour un certainc< 0. Mais alorsf ∗θ =θ 6= λ( f )θ : contradiction.Supposons quen soit inférieur ou égal à 8 alors K2Z > 0. Il s’en suit que la forme d’intersec-tion est strictement négative sur le complément orthogonalH ⊂ H2(Z ,R) de KZ . CommeH est de dimension finie et invariant parf ∗ et commef ∗ préserve H2(Z ,Z), la restrictionde f ∗ à H est d’ordre fini. Il en résulte l’existence d’un entierk tel que f k∗ soit trivial. Enparticulier f k préserve les diviseurs exceptionnels obtenus en éclatant lesn points deP2(C);par suitef k appartient, à conjugaison près, à Aut(P2(C)).
3. Propriétés d’un automorphisme d’entropie positive
Soit f un automorphisme sur une surface kählérienne d’entropie positive. Comme l’indiquele résultat qui suit les valeurs propres def ∗ vérifient des propriétés particulières.
THÉORÈME3.12. Soit f un automorphisme sur une surface kählérienne tel queλ( f ) >1. Le premier degré dynamiqueλ( f ) est une valeur propre def ∗ avec multiplicité1 et c’estl’unique valeur propre de module strictement supérieur à1.Si η est une valeur propre def ∗, alors soitη appartient àλ( f ),1/λ( f ), soit |η|= 1.
Soit f un automorphisme sur une surface kählérienne tel queλ( f ) > 1. Notonsχ f le po-lynôme caractéristique def ∗. C’est un polynôme monique dont le terme constant, qui estle déterminant def ∗, vaut±1. Désignons parψ f le polynôme minimal deλ( f ). D’aprèsle Théorème 3.12 les racines deχ f , et celles deψ f , exceptéesλ( f ) et 1/λ( f ), sont sur lecercle unité. Un telψ f est unpolynôme deSALEM et λ( f ) est unnombre deSALEM . Leplus petit nombre de SALEM connu est la racineλLehmerdu polynôme de LEHMER
L(t) = t10+ t9− t7− t6− t5− t4− t3+ t +1
dont nous reparlerons au Chapitre 4.
4. Trois involutions
Le groupe PGL3(C)×PGL3(C) agit sur Bir(P2) de la façon suivante
PGL3(C)×Bir(P2)×PGL3(C)→ Bir(P2) (A, f ,B) 7→ A f B−1.
Il est naturel de s’intéresser aux transformations birationnelles quadratiques ([CD]) ; en ef-fet toute transformation birationnelle du plan projectif complexe s’écrit comme un produit

30 3. UN PEU DE DYNAMIQUE
de transformations quadratiques (Théorème 1.7). Introduisons les trois involutions biration-nelles quadratiques suivantes qui jouent un rôle particulier
σ = (yz: xz: xy), ρ = (xy : z2 : yz), τ = (x2 : xy : y2−xz).
Soit f une transformation birationnelle de degré 2; alorsf est de l’une des formes suivantes
AσB, AρB, AτB, A, B∈ PGL3(C).
Les transformationsAσB, avecA, B automorphismes deP2(C), sont les transformationsbirationnelles quadratiques génériques ; en effet l’adhérence de l’ensemble des transforma-tions birationnelles quadratiques est une variété irréductible et siO ( f ) désigne l’orbite defsous l’action de PGL3(C)×PGL3(C) on peut vérifier que ([CD])
dimO (σ) = 14, dimO (ρ) = 13, dimO (τ) = 12.
4.1. Étude deσ. Les points d’indétermination deσ sontP = (1 : 0 : 0), Q = (0 : 1 : 0)etR= (0 : 0 : 1); quant au lieu exceptionnel, il est formé des droites∆ = x= 0, ∆′ = y=0 et ∆′′ = z= 0.
∆
R∆′
Q∆′′
P
Commençons par éclater le pointP; notons E le diviseur exceptionnel etD 1 la transforméestricte deD :
y = u1
z= u1v1
E = u1 = 0∆′′1 = v1 = 0
y = r1s1
z= s1
E = s1 = 0∆′1 = r1 = 0

4. TROIS INVOLUTIONS 31
∆′′1
∆′1
∆1
R1
Q1
E
D’une part
(u1,v1)→ (u1,u1v1)(y,z)→ (u1v1 : v1 : 1) =
(1u1
,1
u1v1
)
(y,z)→
(1u1
,1v1
)
(u1,v1)
;
d’autre part
(r1,s1)→ (r1s1,s1)(y,z)→ (r1s1 : 1 : r1) =
(1
r1s1,
1s1
)
(y,z)→
(1r1
,1s1
)
(r1,s1)
.
Par suite E est envoyé sur∆1; commeσ est une involution∆1 est envoyé sur E.Éclatons le pointQ1; cette fois nous désignerons par F le diviseur exceptionnelet parD 2 latransformée stricte deD 1 :
x = u2
z= u2v2
F = u2 = 0∆′′2 = v2 = 0
x = r2s2
z= s2
E = s2 = 0∆2 = r2 = 0
∆′2
∆′′2
∆2
E1
F
R2
On a
(u2,v2)→ (u2,u2v2)(x,z)→ (v2 : u2v2 : 1) =
(1u2
,1
u2v2
)
(x,z)→
(1u2
,1v2
)
(u2,v2)
32 3. UN PEU DE DYNAMIQUE
et
(r2,s2)→ (r2s2,s2)(x,z)→ (1 : r2s2 : r2) =
(1
r2s2,
1s2
)
(x,z)→
(1r2
,1s2
)
(r2,s2)
.
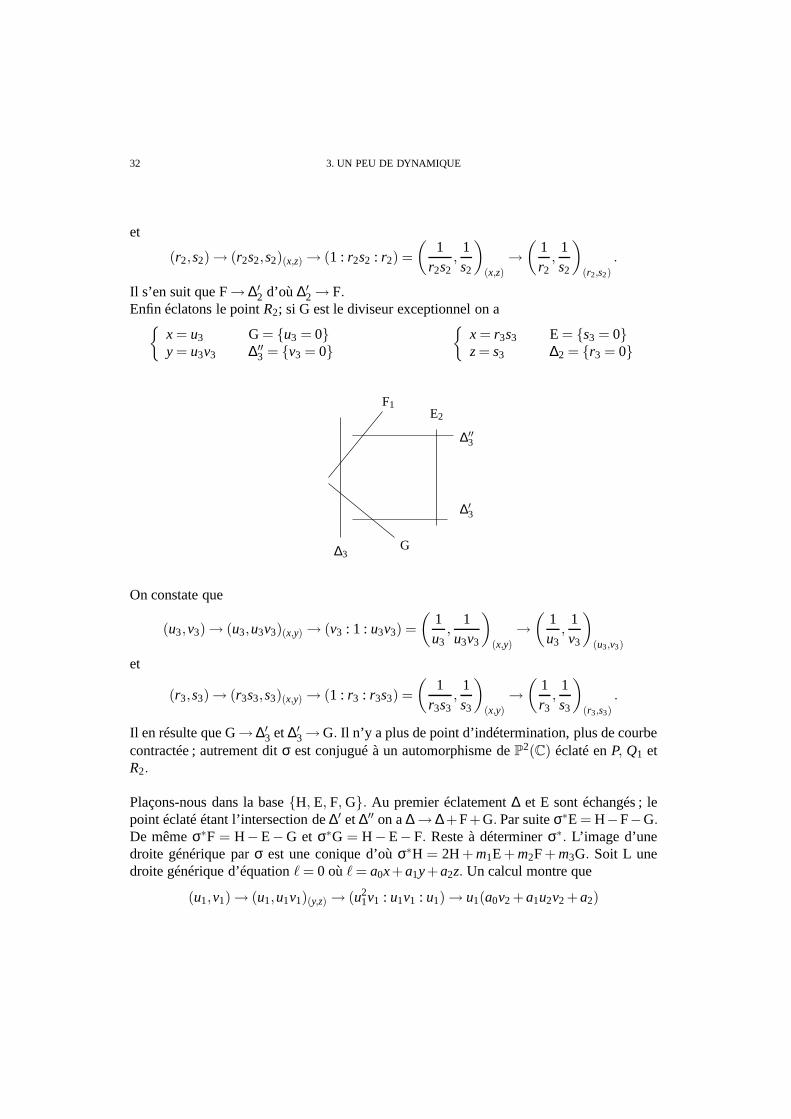
Il s’en suit que F→ ∆′2 d’où ∆′2→ F.Enfin éclatons le pointR2; si G est le diviseur exceptionnel on a
x = u3
y = u3v3
G = u3 = 0∆′′3 = v3 = 0
x = r3s3
z= s3
E = s3 = 0∆2 = r3 = 0
∆′3
∆′′3
F1E2
∆3G
On constate que
(u3,v3)→ (u3,u3v3)(x,y)→ (v3 : 1 : u3v3) =
(1u3
,1
u3v3
)
(x,y)→
(1u3
,1v3
)
(u3,v3)
et
(r3,s3)→ (r3s3,s3)(x,y)→ (1 : r3 : r3s3) =
(1
r3s3,
1s3
)
(x,y)→
(1r3
,1s3
)
(r3,s3)
.
Il en résulte que G→ ∆′3 et∆′3→G. Il n’y a plus de point d’indétermination, plus de courbecontractée ; autrement ditσ est conjugué à un automorphisme deP2(C) éclaté enP, Q1 etR2.
Plaçons-nous dans la baseH, E, F, G. Au premier éclatement∆ et E sont échangés ; lepoint éclaté étant l’intersection de∆′ et∆′′ on a∆→ ∆+F+G. Par suiteσ∗E = H−F−G.De mêmeσ∗F = H−E−G et σ∗G = H−E−F. Reste à déterminerσ∗. L’image d’unedroite générique parσ est une conique d’oùσ∗H = 2H+ m1E+ m2F+ m3G. Soit L unedroite générique d’équationℓ = 0 oùℓ = a0x+a1y+a2z. Un calcul montre que
(u1,v1)→ (u1,u1v1)(y,z)→ (u21v1 : u1v1 : u1)→ u1(a0v2 +a1u2v2 +a2)

4. TROIS INVOLUTIONS 33
s’annule à l’ordre 1 sur E= u1 = 0 d’où m1 = 0. De même on constate que
(u2,v2)→ (u2,u2v2)(x,z)→ (u2v2 : u22v2 : u2)→ u2(a0v2 +a1u2v2 +a2),
resp.
(u3,v3)→ (u3,u3v3)(x,y)→ (u3v3 : u3 : u23v3)→ u3(a0v3 +a1+a2u3v3)
s’annule à l’ordre 1 sur F= u2 = 0, resp. G= u3 = 0 d’où m2 = −1, resp.m3 = −1.Par suiteσ∗H = 2H−E−F−G et la matrice caractéristique deσ dans la baseH, E, F, Gest
Mσ =
2 1 1 1−1 0 −1 −1−1 −1 0 −1−1 −1 −1 0
.
4.2. Étude deρ. À partir des plongements naturels
C2⊂ P2(C), (x : y : 1) 7→ (x : y : z), C×C⊂ P1(C)×P1(C), (x,y) 7→ ((x : 1),(y : 1))
on obtient l’identification suivante
P2(C)←→ P1(C)×P1(C), (x : y : z)←→ ((x : z),(y : z)).
On a donc
(x : y : z) oo //
ρ
((x : z),(y : z))
ρ
(xy : z2 : yz) oo // ((xy : yz),(z2 : yz)) = ((x : z),(z : y))
puisque((x : z),(z : y)) est holomorphe surP1(C)×P1(C), la transformationρ est un auto-morphisme surP2(C) éclaté en un nombre fini de points. Détaillons ceci.
On remarque que
Indρ = P, Q, Excρ = ∆∪∆′
où
P = (0 : 1 : 0), Q = (1 : 0 : 0), ∆ = y = 0, ∆′ = z= 0.

34 3. UN PEU DE DYNAMIQUE
∆
∆′Q
P
Posons :
x = r1s1
z= s1E = s1 = 0
x = u1
z= u1v1
E = u1 = 0∆′ = v1 = 0
∆1
∆′1Q1
E
On a(r1,s1)→ (r1s1,s1)(x,z)→ (r1 : s1 : 1); par suite E est envoyé sur∆. Puisqueρ est uneinvolution ∆→ E.Par ailleurs(u1,v1)→ (u1,u1v1)(x,z)→ (1 : u1v2
1 : v1).
ÉclatonsQ1, posons
y = r2s2
z= s2
F = s2 = 0∆2 = r2 = 0
y = u2
z= u2v2
F = u2 = 0∆′2 = v2 = 0
4. TROIS INVOLUTIONS 35
∆2
E1
∆′2
F
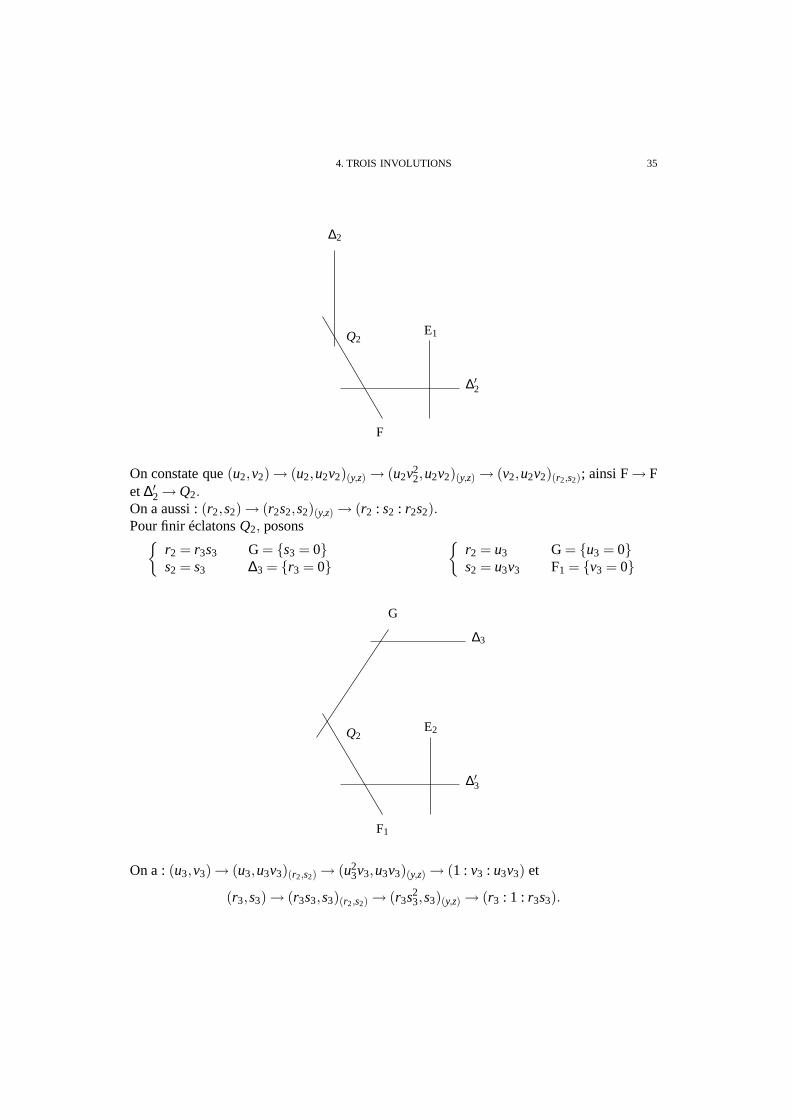
Q2
On constate que(u2,v2)→ (u2,u2v2)(y,z)→ (u2v22,u2v2)(y,z)→ (v2,u2v2)(r2,s2); ainsi F→ F
et ∆′2→Q2.On a aussi :(r2,s2)→ (r2s2,s2)(y,z)→ (r2 : s2 : r2s2).Pour finir éclatonsQ2, posons
r2 = r3s3
s2 = s3
G = s3 = 0∆3 = r3 = 0
r2 = u3
s2 = u3v3
G = u3 = 0F1 = v3 = 0
Q2
∆3
∆′3
F1
E2
G
On a :(u3,v3)→ (u3,u3v3)(r2,s2)→ (u23v3,u3v3)(y,z)→ (1 : v3 : u3v3) et
(r3,s3)→ (r3s3,s3)(r2,s2)→ (r3s23,s3)(y,z)→ (r3 : 1 : r3s3).

36 3. UN PEU DE DYNAMIQUE
Par suite il n’y a plus de point d’indétermination, G est envoyé sur∆′3 et puisqueρ est uneinvolution, ∆′3 est envoyé sur G.Par conséquentρ est conjugué à un automorphisme de BlP,Q1,Q2P
2.
On travaille dans la baseH, E, F, G. Au premier éclatement E est envoyé sur∆; au secondF est fixé et∆ est contracté sur F∩∆. Enfin au dernier G est envoyé sur∆′. Le secondéclatement étant l’éclatement d’un point sur∆ on a∆→ ∆ +F; puisque le dernier consisteà éclater F∩∆ on a∆→ ∆+F→ ∆+F+2G. Puisque les deux premiers points éclatés sontsur∆′ on a∆′→ ∆′+E+F; pour finir on éclate un point de F∩∆ d’où ∆′→ ∆′+E+F→∆′+E+F+G.Par suite
ρ∗E = H−F−2G, ρ∗F = F, ρ∗G = H−E−F−G.
Reste à déterminerρ∗H. L’image d’une droite générique parρ étant une coniqueρ∗H s’écritaussi 2H+m0E+m1F+m2G. Déterminons lesmi . Soit L une droite générique ; elle a pouréquationℓ = 0 avecℓ = a0x+a1y+a2z. Un calcul montre que
(r1,s1)→ (r1s1,s1)(x,z)→ (r1s1 : s21 : s1)→ s1(a0r1 +a1s1 +a2)
s’annule à l’ordre 1 sur E= s1 = 0 d’où m0 = 1. On constate que
(r2,s2)→ (r2s2,s2)(y,z)→ (r2s2 : s22 : r2s2
2)→ s2(a0r2 +a1s2 +a2r2s2)
s’annule à l’ordre 1 sur F= s2 = 0 d’où m1 = 1. On remarque que
(r3,s3)→ (r3s23,s3)(y,z)→ (r3s2
3 : s23 : r3s3
3)→ s23(a0r3 +a1 +a2r3)
s’annule à l’ordre 2 sur G= s3 = 0, par suitem2 = 2. On en déduit que la matrice carac-téristique deρ dans la baseH, E, F, G
Mρ =
1 1 0 1−1 0 0 −1−1 −1 1 −1−2 −2 0 −1
.
4.3. Étude deτ. Rappelons queτ ne contracte qu’une droite∆ = x = 0 et n’éclatequ’un pointP = (0 : 0 : 1).
P
∆
Éclatons le pointP; posonsx = r1s1 ety = s1.
4. TROIS INVOLUTIONS 37
P1
∆1
E
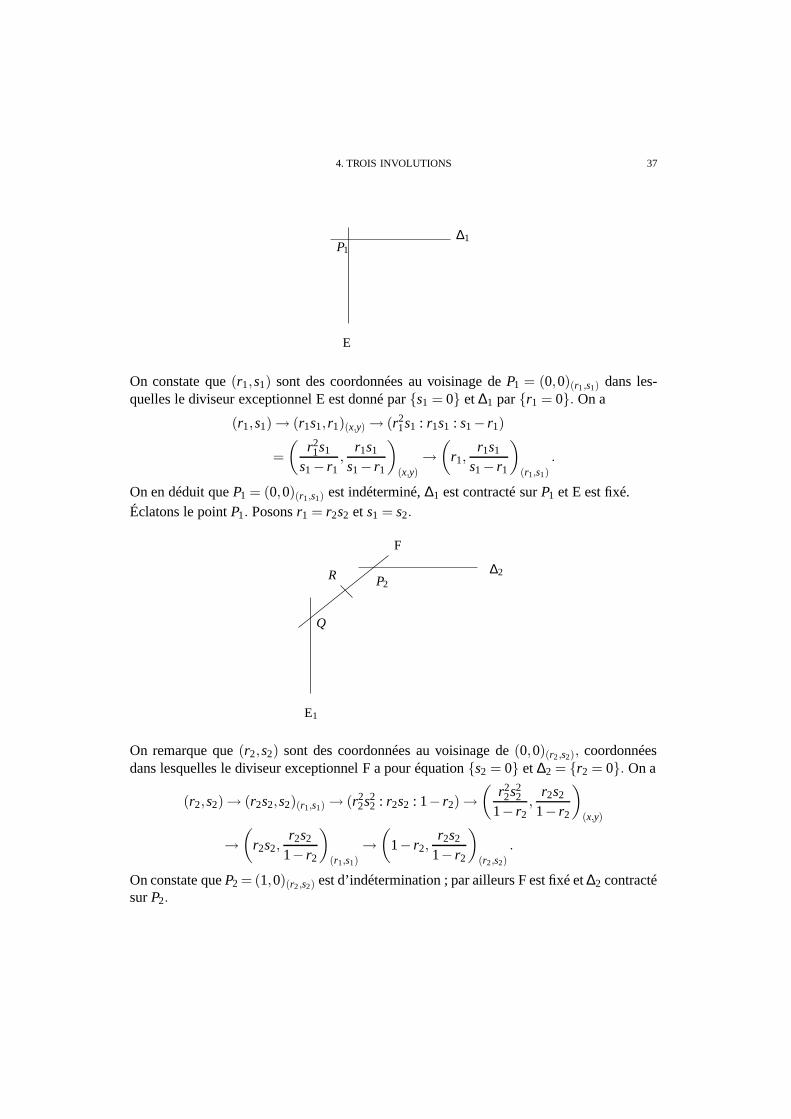
On constate que(r1,s1) sont des coordonnées au voisinage deP1 = (0,0)(r1,s1) dans les-quelles le diviseur exceptionnel E est donné pars1 = 0 et ∆1 parr1 = 0. On a
(r1,s1)→ (r1s1, r1)(x,y)→ (r21s1 : r1s1 : s1− r1)
=
(r21s1
s1− r1,
r1s1
s1− r1
)
(x,y)→
(r1,
r1s1
s1− r1
)
(r1,s1)
.
On en déduit queP1 = (0,0)(r1,s1) est indéterminé,∆1 est contracté surP1 et E est fixé.Éclatons le pointP1. Posonsr1 = r2s2 et s1 = s2.
E1
F
Q
P2R ∆2
On remarque que(r2,s2) sont des coordonnées au voisinage de(0,0)(r2,s2), coordonnéesdans lesquelles le diviseur exceptionnel F a pour équations2 = 0 et ∆2 = r2 = 0. On a
(r2,s2)→ (r2s2,s2)(r1,s1)→ (r22s2
2 : r2s2 : 1− r2)→(
r22s2
2
1− r2,
r2s2
1− r2
)
(x,y)
→(
r2s2,r2s2
1− r2
)
(r1,s1)
→(
1− r2,r2s2
1− r2
)
(r2,s2)
.
On constate queP2 = (1,0)(r2,s2) est d’indétermination ; par ailleurs F est fixé et∆2 contractésurP2.
38 3. UN PEU DE DYNAMIQUE
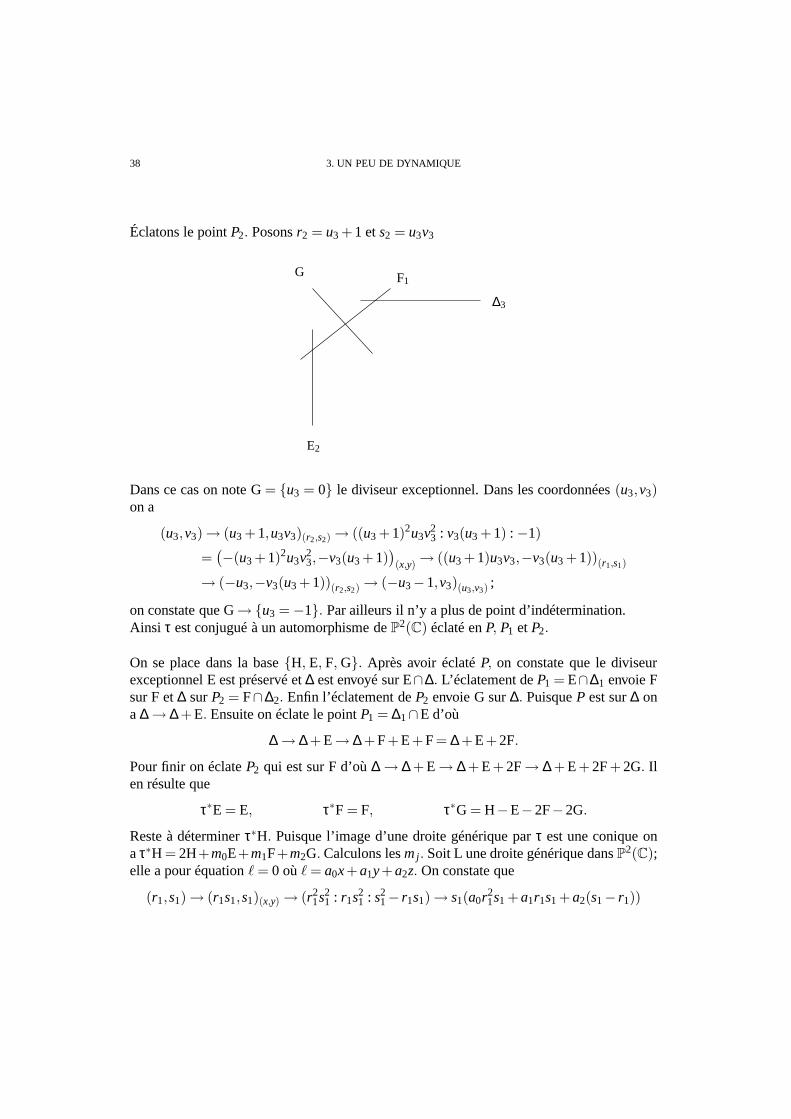
Éclatons le pointP2. Posonsr2 = u3 +1 ets2 = u3v3
E2
F1G
∆3
Dans ce cas on note G= u3 = 0 le diviseur exceptionnel. Dans les coordonnées(u3,v3)on a
(u3,v3)→ (u3 +1,u3v3)(r2,s2)→ ((u3 +1)2u3v23 : v3(u3 +1) :−1)
=(−(u3 +1)2u3v2
3,−v3(u3 +1))(x,y)→ ((u3 +1)u3v3,−v3(u3 +1))(r1,s1)
→ (−u3,−v3(u3 +1))(r2,s2)→ (−u3−1,v3)(u3,v3)
;
on constate que G→u3 =−1. Par ailleurs il n’y a plus de point d’indétermination.Ainsi τ est conjugué à un automorphisme deP2(C) éclaté enP, P1 etP2.
On se place dans la baseH, E, F, G. Après avoir éclatéP, on constate que le diviseurexceptionnel E est préservé et∆ est envoyé sur E∩∆. L’éclatement deP1 = E∩∆1 envoie Fsur F et∆ surP2 = F∩∆2. Enfin l’éclatement deP2 envoie G sur∆. PuisqueP est sur∆ ona ∆→ ∆ +E. Ensuite on éclate le pointP1 = ∆1∩E d’où
∆→ ∆ +E→ ∆ +F+E+F= ∆ +E+2F.
Pour finir on éclateP2 qui est sur F d’où∆→ ∆ + E→ ∆ + E+ 2F→ ∆ + E+ 2F+ 2G. Ilen résulte que
τ∗E = E, τ∗F = F, τ∗G = H−E−2F−2G.
Reste à déterminerτ∗H. Puisque l’image d’une droite générique parτ est une conique onaτ∗H = 2H+m0E+m1F+m2G. Calculons lesmj . Soit L une droite générique dansP2(C);elle a pour équationℓ = 0 oùℓ = a0x+a1y+a2z. On constate que
(r1,s1)→ (r1s1,s1)(x,y)→ (r21s2
1 : r1s21 : s2
1− r1s1)→ s1(a0r21s1 +a1r1s1 +a2(s1− r1))

5. ENSEMBLES DE FATOU 39
s’annule à l’ordre 1 sur E= s1 = 0 doncm0 = 1. De même un calcul montre que
(r2,s2)→ (r2s22,s2)(x,y)→ (r2
2s42 : r2s3
2 : s22− r2s2
2)→ s22(a0r2
2s22 +a1r2s2 +a2(1− r2))
et F= s2 = 0 d’où m1 = 2. Enfin on obtient que
(u3,v3)→ (u3 +1,u3v3)(r2,s2)→ ((u3 +1)u23v2
3,u3v3)(x,y)
→ u33(a0(u3 +1)2u3v4
3 +a1(u3 +1)v33−a2v2
3)
et G= u3 = 0 ainsim2 = 3. Par suite la matrice caractéristique deτ dans la baseH, E, F, G
Mτ =
1 0 0 1−1 1 0 −1−2 0 1 −2−3 0 0 −2
.
5. Ensembles de FATOU
5.1. Définitions et propriétés. Soit f un automorphisme sur une variétéM complexe,compacte. Rappelons que l’ensemble deFATOU F ( f ) de f est l’ensemble des points quipossèdent un voisinageV tel que f n
|V , n ≥ 0 soit une famille normale. Considéronsl’ensemble
G = G (U ) = g: U → U |g = limnj→+∞
f nj.
On dit queU est undomaine de rotationsi G est un sous-groupe de Aut(U ) autrement ditsi tout élément deG définit un automorphisme deU . Une autre définition possible est lasuivante : siU est une composante deF ( f ) invariante parf , on dit queU est un domainede rotation sif|U est conjugué à une rotation linéaire ; en dimension 1 cela correspond àposséder un disque de SIEGEL. On a la liste de propriétés suivantes ([BKb ]).
– Si f préserve une forme volume lisse, alors toute composante de FATOU est un do-maine de rotation.
– SiU est un domaine de rotation,G est un sous-groupe de Aut(M ).– Une composante de FATOU U est un domaine de rotation si et seulement s’il existe
une sous-suite(n j) tendant vers+∞ telle que( f nj ) converge uniformément versl’identité sur des sous-ensembles compacts deU .
– SiU est un domaine de rotation,G est un groupe de LIE abélien, compact et l’actiondeG surU est analytique réelle.
SoitG0 une composante connexe de l’identité deG . PuisqueG est un groupe de LIE abélien,infini et compact,G0 est un tore de dimensiond ≥ 0; notons qued ≤ dimCM . On dit qued est lerang du domaine de rotation. Le rang est égal à la dimension de l’adhérence del’orbite générique d’un point deU .On a des renseignements de nature géométrique sur les domaines de rotation : siU est undomaine de rotation, il est pseudo-convexe ([BKb ]).

40 3. UN PEU DE DYNAMIQUE
Donnons quelques précisions lorsqueM est une surface kählérienne possédant un automor-phisme d’entropie positive.
THÉORÈME 3.13 ([BKb ]). SoientZ une surface kählérienne compacte etf un auto-morphisme surZ d’entropie positive. SoitU un domaine de rotation de rangd. Alors d≤ 2.Si d = 2 la G0-orbite d’un point générique deU est un2-tore réel.Si d vaut1, il existe un champ de vecteurs holomorphes induisant surZ un feuilletage ensurfaces de Riemann dont chaque feuille est invariante parG0.
On peut utiliser un argument de linéarisation locale pour montrer que certains points fixesappartiennent à l’ensemble de FATOU. Réciproquement linéariser un point fixe de l’en-semble de FATOU est toujours possible.
5.2. Ensemble de FATOU des automorphismes de HÉNON. Soit f un automorphismede HÉNON. On désigne parK ± le sous-ensemble deC2 dont l’orbite positive/négative estbornée
K ± = (x,y) ∈ C2 | f±n(x,y) |n≥ 0 est borné.Posons
K = K +∩K −, J ± = ∂K ±, J = J +∩ J −, U + = C2\K +.
Énonçons quelques propriétés.– Les itérésf n, n≥ 0, forment une famille normale dans l’intérieur deK +.– Si (x,y) appartient àJ + il n’existe pas de voisinageU de(x,y) sur lequel la famille f n|U |n≥ 0 soit normale.
On a l’énoncé suivant.
PROPOSITION3.14. L’ensemble deFATOU d’une application deHÉNON estC2\ J +.
DÉFINITIONS. Soit Ω une composante de FATOU ; Ω est diterécurrentes’il existe uncompactC de Ω et un pointm deC tels que f nj (m) appartienne àC pour une infinité den j →+∞. Une composante récurrente de FATOU est nécessairement périodique.Un point fixemde f est unfoyersi mappartient à l’intérieur de la variété stable
W s(m) = p| limn→+∞
dist( f n(m), f n(p)) = 0.
On dit queW s(m) est lebassindem. Si m est un foyer, les valeurs propres deD f(m) sontde module inférieur à 1.Un disque deSIEGEL (resp.anneau deHERMAN) est l’image d’un disque (resp. d’un an-neau)∆ par une application holomorphe injectiveϕ avec la propriété suivante : pour toutzdans∆ on a
f ϕ(z) = ϕ(αz), α = e2iπθ, θ ∈ R\Q.
On peut décrire les composantes de FATOU récurrentes d’un automorphisme de HÉNON.
5. ENSEMBLES DE FATOU 41
THÉORÈME 3.15 ([BS91]). Soient f un automorphisme deHÉNON de déterminantjacobien strictement inférieur à1 et Ω une composante deFATOU récurrente. AlorsΩ est
– ou bien le bassin d’un foyer ;– ou bien un disque deSIEGEL ;– ou bien un anneau deHERMAN.
Sous certaines conditions les composantes de FATOU d’un automorphisme de HÉNON sontrécurrentes.
PROPOSITION3.16. Les composantes deFATOU d’une application deHÉNON préser-vant le volume sont périodiques et récurrentes.
5.3. Ensemble de FATOU des automorphismes d’entropie positive sur les tores,(quotients de) K3, surfaces rationnelles.Si Z est un tore complexe, un automorphismed’entropie positive est essentiellement un élément de GL2(Z); le fait que l’entropie soitpositive implique que les valeurs propres satisfont :|λ1|< 1< |λ2| et l’ensemble de FATOU
est vide.Supposons queZ soit une surface K3 ou un quotient d’une surface K3. Puisqu’il existeune forme volume invariante les seules composantes de FATOU possibles sont les domainesde rotation. MCMULLEN a montré l’existence de surfaces K3 non algébriques avec desdomaines de rotation de rang 2 (voir [McM02]) ; une autre référence est la suivante [Ogu].Les autres surfaces compactes possédant des automorphismes d’entropie positive sont dessurfaces rationnelles ; dans ce cas il peut y avoir des domaines de rotation de rang 1 et2 (voir [BK09, McM07]). D’autres phénomènes peuvent arriver tels des bassins attractifset/ou répulsifs ([BK09, McM07]).


CHAPITRE 4
Automorphismes d’entropie positive et groupes de WEYL
Le lien entre les groupes de WEYL et la géométrie birationnelle sur le plan projectif com-plexe a été abordé dès 1895 dans [Kan95] puis dans [DV36, Nag60, Nag61, Cob61, Giz80,Loo81, Har85, Man86, Har87, Nik87, Har88, DO88, Hir88, Zha01, DZ01].
1. Groupes de WEYL
1.1. Groupes de WEYL , I. SoitZ une surface rationnelle. Considérons la représenta-tion
cr : Aut(Z )→GL(H2(Z ,Z)), f 7→ f∗;
son image est un groupe d’isométries préservant en particulier le produit d’intersection. Soite0, . . . ,en une base de H2(Z ,Z); si
e0 ·e0 = 1, ej ·ej =−1, ∀ 1≤ j ≤ k, ei ·ej = 0, ∀ 0≤ i 6= j ≤ n
on dit quee0, . . . ,en est unebase géométrique.
EXEMPLE 4.1. Les basesH, E, F, G introduites au §4.1, §4.2 et §4.3 sont des basesgéométriques.Plus généralement supposons queπ : Z → P2(C) soit obtenue en éclatantn points distinctsdeP2(C). Si Ej = π−1(p j) désigne la fibre exceptionnelle obtenue en éclatantp j et π∗H laclasse d’une droite, alorsπ∗H, E1, . . . , En est une base géométrique.
Replaçons-nous dans les conditions du Théorème 3.10. Soient Z une surface rationnelle etfun automorphisme surZ tel que f∗ soit d’ordre infini. Il existe une suite d’applications holo-morphesπ j : Z j+1→ Z j telles queZ1 = P2(C) etZn+1 = Z . Notons Ej = π−1
j+1(p j)⊂ Z j+1
le diviseur exceptionnel obtenu en éclatantp j et ej = π∗n+1 . . .π∗j+1(E j). UneconfigurationexceptionnelleE est la donnée desej . Soit α un élément de H2(Z ,Z) tel queα ·α = −2,
alorsRα(x) = x+(x·α)α envoieα sur−α etRα fixe tout élément deα⊥; autrement ditRαest une réflexion dans la directionα.Considérons les vecteurs définis par
α0 = e0−e1−e2−e3, α j = ej+1−ej , 1≤ j ≤ n−1.
43

44 4. AUTOMORPHISMES D’ENTROPIE POSITIVE ET GROUPES DE WEYL
Pour tout j dans0, . . . ,n−1 on a l’égalitéα j ·α j = −2. Pour j non nul la réflexionRα j
induit une permutation surej , ej+1. Le sous-groupe engendré par lesRα j , avec 1≤j ≤ n− 1, coïncide avec l’ensemble des permutations dee1, . . . , en. Le groupe〈Rα j |0≤j ≤ n−1〉 est appelégroupe deWEYL et noté Wn⊂O(Z1,n).Les groupes de WEYL sont, pour 3≤ n≤ 8, isomorphes au groupes de COXETER finis
A1×A2, A4, D5, E6, E7, E8
et sont associés aux surfaces de Del Pezzo1. Pourk≥ 9 les groupes de WEYL sont infiniset pourk≥ 10 ils contiennent des éléments dont le rayon spectral est strictement supérieurà 1.Donnons quelques propriétés de ce groupe. Sif est un automorphisme deZ , un résultat deNAGATA assure l’existence d’un unique élémentw de Wn tel que le diagramme
Z1,n
ϕ
w // Z1,n
ϕ
H2(Z ,Z)f∗
// H2(Z ,Z)
commute ; on dit quew estréalisé parl’automorphismef . On a aussi l’énoncé suivant.
THÉORÈME4.2 ([Dol08]). SoitZ une surface rationnelle qui domineP2(C).– Le groupe deWEYL Wk⊂GL(Pic(Z )) ne dépend pas de la configuration exception-
nelle choisie.– SiE etE ′ sont deux configurations exceptionnelles distinctes, il existew dansWk tel
quew(E ) = E ′.– SiZ est obtenue en éclatantk points génériques et siE est une configuration excep-
tionnelle, alors, pour toutw dans le groupe deWEYL, w(E ) est une configurationexceptionnelle.
Un produit de générateursRα j est unélément deCOXETER w dans Wn. Notons que tous leséléments de COXETER sont conjugués donc le rayon spectral dew est bien défini.L’involution de CREMONA est représentée par la réflexionκi jk = Rαi jk où αi jk = e0−ei −ej −ek pour i, j, k≥ 1 distincts ; elle agit comme suit
e0→ 2e0−ei−ej −ek, ei → e0−ej −ek, ej → e0−ei−ek
ek→ e0−ei−ej , eℓ→ eℓ si ℓ 6∈ 0, i, j, kLorsquen = 3, on dira queκ123 est l’élément standardde W3.
1. Une surface de Del Pezzo est isomorphe àP2(C) ou à P1(C)× P1(C) ou encore àP2(C) éclaté en1≤ r ≤ 8 points en « position générale ».

1. GROUPES DE WEYL 45
Soit πn = κ123Rα1 . . .Rαn−1 ∈ Σn ⊂Wn la permutation cyclique(123. . .n). Pourn≥ 4, onappelle élément standard du groupe de WEYL l’élémentw de Wn défini parw = πnκ123. Ilvérifie
w(e0) = 2e0−e2−e3−e4, w(e1) = e0−e3−e4, w(e2) = e0−e2−e4,
w(e3) = e0−e2−e3, w(ej) = ej+1, 4≤ j ≤ n−2, w(en−1) = e1.
Comme nous le verrons au §3 il existe une condition suffisantepermettant de réaliser deséléments du groupe de WEYL par des automorphismes des surfaces rationnelles obtenuesen éclatantk points distincts deP2(C) le long d’une cubique.
1.2. Groupes de WEYL , II. Une autre façon de voir le groupe de WEYL est la sui-vante. Sin≥ 3 on considère le grapheΓn suivant
s0
s1 s2 s3 s5 sn−1s4
. . .
dont l’ensemble des sommets estSn = s0, . . . ,sn−1. Lorsquen = 3, Γ3 possède un seulcôté, joignants1 às2. Soit M = (mi j ) la matrice deM n(C) définie par
mi j =
1 si i = j3 sisi etsj sont « voisins » dansΓn
2 sinon
Le groupe de WEYL est donné par
Wn = 〈s0, . . . , sn−1 |(sisj)mi j = 1〉.
ConsidéronsVn = RSn muni de la baseα0, . . . , αn−1, base duale des0, . . . , sn−1, et duproduit intérieur
Bn(α j ,α j) =−2cos(π/mi j ).
Tout élémentα deVn tel queB(α,α) =±2 détermine une réflexion
Rα(x) = x− 2B(x,α)
B(α,α)α (4.1)
dans le groupe orthogonal(Vn,Bn). L’homomorphisme
Wn→ (Vn,Bn), si 7→ Rαi

46 4. AUTOMORPHISMES D’ENTROPIE POSITIVE ET GROUPES DE WEYL
définit l’action géométrique de Wn surVn.Lesαi sont lesracines simplesde Wn. Lesracinesde Wn sont les orbites des racines simples
Θn =[
Wn ·αi .
NotonsLn le réseau⊕Zαi. L’égalité (4.1) assure queLn est invariant sous l’action de Wn.Un vecteurv = ∑ciαi deVn estpositif si ci ≥ 0 pour touti. On désigne parΘ+
n l’ensembledes racines positives. Toute racine de Wn est positive ou négative,i.e. Θn = Θ+
n ∪ (−Θ+n )
(voir [Bou81, Hum90]). Un produit du type
sς(0)sς(1) . . .sς(n−1),
où ς désigne une permutation de0, . . . , n−1, est un élément de COXETER. Puisque tousles éléments de Wn sont conjugués, ils ont tous le même ordrehn. On ahn = 6, 5, 8, 12, 18, 30pourn = 3, 4, 5, 6, 7, 8 ethn = ∞ pourn≥ 9.
ConsidéronsA(Γn) = 2Id−Bn la matrice adjointe deΓn qui peut être vu comme un opéra-teur surVn. On a
A(Γn)i j =
1 sisi etsj sont « voisins » dansΓn
0 sinon
PROPOSITION4.3 ([McM07]). Le rayon spectralλn = λ(A(Γn)) croit strictement avecn et λ9 = 2.
Le graphe du groupe de WEYL satisfait la propriété suivante : toute arête joint un sommetimpair à un sommet pair d’où la décomposition
Vn = V0n ⊕V1
n , V0n = 〈αi | i pair〉, V1
n = 〈αi | i impair〉
etA(Γn) =
[0 tCn
Cn 0
]. Considérons l’élément de COXETER wn défini par
wn = (s0s2s4 . . .) · (s1s3s5 . . .) = w0n ·w1
n.
Notons que, puisquesisi+2 = si+2si , l’ordre des éléments apparaissant dans l’écriture dew0n
(resp.w1n) n’a pas d’importance. À partir deBn = 2Id−A(Γn) on obtient
w0n =
[−Id tCn
0 Id
], w1
n =
[Id 0Cn −Id
]
puis
wn =
[tCnCn− Id −tCn
Cn −Id
].
Le théorème de Perron-Frobenius assure l’existence d’un vecteur positifvn dansVn, uniquemodulo multiplication par un scalaire, tel queA(Γn) · vn = λnvn. ConsidéronsGn ⊂ Vn lesous-espace vectoriel de dimension 2 engendré par les parties paire et impaire devn =

1. GROUPES DE WEYL 47
v0n + v1
n. L’égalité A(Γn) ·vn = λnvn implique que(Cn ·v0n,
tCn ·v1n) = λn(v1
n,v0n). Par suiteGn
est invariant parwn; plus précisément
wn|Gn=
[λ2
n−1 −λn
λn −1
].
Cette égalité associée à la Proposition 4.3 permet d’énoncer le résultat suivant.
THÉORÈME4.4 ([McM07]). L’application linéairewn|Gnest
– elliptique, d’ordrehn, pourn≤ 8,– parabolique, d’ordre infini, pourn = 9,– hyperbolique, d’ordre infini, pourn≥ 10.
REMARQUE 4.5. Dans le cas elliptiquewn|Gnest une rotation d’angle 2π/hn (voir
[Hum90], §3.7).
THÉORÈME 4.6 ([McM07]). Pourn 6= 9, toute racineα deΘn a une projection ortho-gonale non triviale surGn⊂Vn.
Démonstration.Supposons queα appartienne àΘ+n . Soitβ une projection deα surGn.
Puisqueλn 6= 2 pourn 6= 9 et puisqueα = ∑xiαi , vn = ∑yiαi sont des vecteurs positifson a :
B(vn,β) = B(vn,α) = (2−λn)∑xiyi 6= 0;
par suiteβ 6= 0.
COROLLAIRE 4.7 ([McM07]). Soitw un élément deCOXETER deWn.Si n < 9, toute orbite dew|Θn est formée dehn éléments.Si n > 9, toute orbite dew|Θn est infinie,i.e. wn’a pas de racine périodique.
1.3. Éléments de COXETER et nombres de SALEM . Il existe un lien entre les nombresde SALEM et les éléments de COXETER : les premiers apparaissent comme valeurs propresdes seconds. Le polynôme caractéristique d’un élément de COXETER w de Wn est donnépar
Pn(t) = det(tId−w) =tn−2(t3− t−1)+ (t3+ t2−1)
t−1.
Pour n distinct de 9, le polynômePn a des racines simples et pourn ≥ 10 le polynômePn s’écrit comme le produit de deux polynômesQn et Rn où Qn désigne un polynôme deSALEM et Rn un produit de polynômes cyclotomiques. Les racinest = λ±1
n deQn sont desvaleurs propres dewn|Gn
.
REMARQUE 4.8. Le polynômeQ10 coïncide avec le polynôme de LEHMER d’où λ10 =λLehmer.
Étendons la factorisation dePn de la façon suivante :

48 4. AUTOMORPHISMES D’ENTROPIE POSITIVE ET GROUPES DE WEYL
– on définitQ8 comme étant le polynôme cyclotomique des racinesh8ième de l’unité ;– on poseQ9(t) = t−1.
On dit queλ est unevaleur propre dominantedew si Qn(λ) = 0; autrement dit les valeurspropres dominantes sont les valeurs propres dewn|Gn
et leur conjugués de GALOIS. Lesvecteurs propres associés à ces valeurs propres sont lesvecteurs propres dominants; ilsvérifient la propriété suivante.
THÉORÈME 4.9 ([McM07]). Soientw un élément deCOXETER deWn et v∈ Ln⊗C
un vecteur propre dominant. Sin est distinct de9, on av·α 6= 0 pour toute racineα deΘn.
Démonstration.Il suffit de prouver l’énoncé lorsquew(v) = λ±1n v auquel casv appar-
tient àGn⊗C. Puisquen est distinct de 9, le sous-espace vectorielGn est engendré parvet ses conjugués de GALOIS. Si v ·α = 0, alors, pour tout conjugué de GALOIS v′ dev, ona l’égalitév′ ·α = 0 et la projection deα surGn est nulle : contradiction avec le Théorème4.6.
2. Cubiques marquées, éclatements marqués, paires marquées
2.1. Cubiques marquées.Une cubiqueC ⊂ P2(C) est une courbe réduite de degré3. Elle peut être singulière ou réductible ; on désigne parC ∗ la partie lisse. Commençonspar quelques rappels sur le groupe de PICARD d’une telle courbe ; pour plus de détails onrenvoie à [HM98]. On a la suite exacte suivante
0−→ Pic0(C )−→ Pic(C )−→ H2(C ,Z)−→ 0
où Pic0(C ) est isomorphe– soit à un toreC/Λ (quandC est lisse) ;– soit au groupe multiplicatifC∗ (ceci correspond au cas oùC est une cubique nodale
ou l’union d’une cubique et d’une droite transverse à celle-ci ou l’union de troisdroites en position générale) ;
– soit au groupe additifC (lorsqueC est une cubique cuspidale ou l’union d’une co-nique et d’une droite tangente à celle-ci ou l’union de troisdroites concourantes).
Unecubique marquéeest un couple(C ,η) formé d’une courbe abstraiteC et d’un homo-morphismeη : Z1,n→ Pic(C ) tel que
– les sections du fibré en droitesη(e0) proviennent du plongement deC dansP2(C);– il existe des points bases distinctspi surC ∗ pour lesquelsη(ei) = [pi ] pour i = 2, . . . ,
n.Les points basespi sont uniquement déterminés parη puisqueC∗ se plonge dans Pic(C ).Réciproquement une cubiqueC qui se plonge dansP2(C) et une collection de points dis-tincts surC ∗ déterminent un marquage deC .
REMARQUE 4.10. Différents marquages deC peuvent conduire à différents plonge-ments deC dansP2(C) mais tous ces plongements sont équivalents via l’action de Aut(C ).

2. CUBIQUES MARQUÉES, ÉCLATEMENTS MARQUÉS, PAIRES MARQUÉES 49
Soient(C ,η) et (C ′,η′) deux cubiques marquées ; unisomorphismeentre(C ,η) et (C ′,η′)est une application biholomorphef : C → C ′ telle queη′ = f∗ η.Étant donnée une cubique marquée(C ,η) on pose
W(C ,η) = w∈Wn |(C ,ηw) est une cubique marquée,
Aut(C ,η) = w∈W(C ,η) |(C ,η) et (C ′,η′) sont isomorphes.On peut décomposer le marquageη deC en deux parties
η0 : ker(degη)→ Pic0(C ), degη : Z1,n→ H2(C ,Z).
On a la propriété suivante.
THÉORÈME4.11 ([McM07]). Soit (C ,η) une cubique marquée. Les applicationsη0 etdegη déterminent(C ,η) à isomorphisme près.
Une conséquence de cet énoncé est la suivante.
COROLLAIRE 4.12 ([McM07]). Une cubique irréductible marquée(C ,η) est détermi-née, à isomorphisme près, parη0 : Ln→ Pic0(C ).
2.2. Éclatements marqués.Un éclatement marqué(Z ,Φ) est la donnée d’une surfaceprojective lisseZ et d’un isomorphismeΦ : Z1,n→ H2(Z ,Z) tels que
– Φ envoie le produit de MINKOWSKI (x · x) = x2 = x20− x2
1− . . .− x2n sur le produit
d’intersection sur H2(Z ,Z);– il existe un morphisme birationnelπ : Z →P2(C) présentantZ comme l’éclaté deP2(C)
enn points distinctsp1, . . . , pn;– Φ(e0) = [H] et Φ(ei) = [Ei ] pour i = 1, . . . ,n où H est la préimage d’une droite géné-
rique deP2(C) et Ei le diviseur obtenu en éclatantpi .Le marquage détermine le morphismeπ : Z → P2(C) modulo l’action d’un automorphismedeP2(C).Soient(Z ,Φ) et(Z ′,Φ) deux éclatements marqués ; unisomorphismeentre(Z ,Φ) et(Z ′,Φ′)est la donnée d’une application biholomorpheF : Z → Z ′ tel que le diagramme suivant
Z1,n
Φ
zzuuuuuuuuu
Φ′
$$IIIIIIIII
H2(Z ,Z)F∗
// H2(Z ′,Z)
commute. Si(Z ,Φ) et (Z ′,Φ′) sont isomorphes, il existe un automorphismeϕ deP2(C) telquep′i = ϕ(pi).Supposons qu’il existe deux morphismes birationnelsπ, π′ : Z → P2(C) tels queZ soit lasurface obtenue en éclatantP2(C) en p1, . . . , pn (resp.p′1, . . . , p′n) via π (resp.π′). Il existe

50 4. AUTOMORPHISMES D’ENTROPIE POSITIVE ET GROUPES DE WEYL
une transformation birationnellef : P2(C) 99K P2(C) telle que le diagramme
Zπ
||zzzz
zzzz π′
""DDDD
DDDD
P2(C)f
//_______ P2(C)
commute ; de plus il existe un unique élémentw dansZ1,n tel queΦ′ = Φw.Le groupe de WEYL satisfait la propriété suivante dûe à NAGATA : soient(Z ,Φ) un écla-tement marqué etw un élément deZ1,n. Si (Z ,Φw) est encore un éclatement marqué,alors w appartient au groupe de WEYL Wn. Étant donné un éclatement marqué(Z ,Φ)on noteW(Z ,Φ) l’ensemble des élémentsw de Wn tels que(Z ,Φw) soit un éclatementmarqué :
W(Z ,Φ) = w∈Wn |(Z ,Φw) est un éclatement marqué.L’action à droite du groupe symétrique consiste à réordonner les points base de la suited’éclatements donc le groupe des permutations est contenu dansW(Z ,Φ). L’énoncé quisuit donne d’autres exemples d’éléments deW(Z ,Φ).
THÉORÈME 4.13 ([McM07]). Soient(Z ,Φ) un éclatement marqué etσ l’involutionde CREMONA. Désignons parp1, . . . , pn les points base de(Z ,Φ). Si pour 4 ≤ k ≤ n,le point pk n’appartient pas à la droite passant parpi et p j , où 1≤ i, j ≤ 3, i 6= j, alors(Z ,Φκ123) est un éclatement marqué.
Démonstration.Soientπ : Z → P2(C) le morphisme birationnel associé à l’éclatementmarqué(Z ,Φ). Désignons parq1, q2 et q3 les points d’indétermination deσ. Choisissonsdes coordonnées dans lesquellespi = qi pour i = 1, 2, 3; alorsπ′ = σπ : Z → P2(C) est unmorphisme birationnel permettant de voir(Z ,Φκ123) comme un éclatement marqué avecpoints basep1, p2, p3 et σ(pi) pour i ≥ 4. Ces points sont distincts puisque, par hypothè-se,p4, . . . , pn n’appartiennent pas aux droites contractées parσ.
Une racineα deΘn est uneracine nodalepour(Z ,Φ) si Φ(α) est représenté par un diviseureffectif D. Dans ce casD se projette sur une courbe de degréd > 0 surP2(C); par sui-te α = de0−∑i≥1miei est une racine positive. Une racine nodale est ditegéométriquesi onpeut écrireD comme une somme de courbes rationnelles lisses.
THÉORÈME 4.14 ([McM07]). Soit (Z ,Φ) un éclatement marqué. Si trois des pointsbases sont colinéaires,(Z ,Φ) possède une racine nodale géométrique.
Démonstration.Quitte à réordonner les points basesp1, . . . , pn, on peut supposer quep1, p2 et p3 sont colinéaires ; notonsL la droite passant par ces trois points. À réindexationprès on se ramène à : les points bases appartenant àL sont p1, . . . , pk. La transformée

2. CUBIQUES MARQUÉES, ÉCLATEMENTS MARQUÉS, PAIRES MARQUÉES 51
stricteL deL induit une courbe rationnelle lisse surZ avec[L] = [H−∑ki=1Ei] d’où
Φ(α123) = [L+k
∑i=1
Ei].
THÉORÈME4.15 ([McM07]). Soit (Z ,Φ) un éclatement marqué. Si(Z ,Φ) n’a pas deracine géométrique nodale, alors
W(Z ,Φ) = Wn.
Démonstration.Commençons par remarquer que si(Z ,Φ) n’a pas de racine nodalegéométrique et siw appartient àW(Z ,Φ), alors (Z ,Φw) ne possède pas de racine no-dale géométrique. Il suffit donc de démontrer que les générateurs de Wn appartiennent àW(Z ,Φ). Pour les transpositions cela découle de l’inclusion du groupe des permutationsdansW(Z ,Φ); pourκ123 c’est une conséquence des Théorèmes 4.13 et 4.14.
COROLLAIRE 4.16 ([McM07]). Une surface marquée possède une racine nodale si etseulement si elle possède une racine nodale géométrique.
2.3. Paires marquées.2.3.1. Premières définitions.Soit(Z ,Φ) un éclatement marqué. Rappelons qu’unecourbe
anticanoniqueest une courbe réduiteY ⊂ Z telle que la classe deY dans H2(Z ,Z) vérifie
[Y] = [3H−∑i
Ei ] =−KZ . (4.2)
Unepaire marquée(Z ,Φ,Y) est la donnée d’un éclatement marqué(Z ,Φ) et d’une courbeanticanoniqueY. Un isomorphismeentre les paires marquées(Z ,Φ,Y) et (Z ′,Φ′,Y′) est unbiholomorphismef deZ dansZ ′, compatible avec les marquages et qui envoieY surY′.Si n≥ 10, alorsZ contient au plus une courbe anticanonique irréductible ; eneffet, si unetelle courbeY existe, alorsY2 = 9−n < 0.
2.3.2. Des surfaces aux cubiques.Considérons une paire marquée(Z ,Φ,Y). Soit πune projection deZ surP2(C) compatible avecΦ. L’égalité (4.2) implique queC = π(Y) estune cubique passant par chaque point basepi avec multiplicité 1. De plus, le fait que Ei ·Y =1 assure queπ : Y→ C est un isomorphisme. L’identification de H2(Z ,Z) et Pic(Z ) permetd’obtenir le marquage naturel
η : Z1,n Φ−→ H2(Z ,Z) = Pic(Z )r−→ Pic(Y)
π∗−→ Pic(C )
où r est l’application de restriction Pic(Z )r−→ Pic(Y). Ainsi une paire marquée(Z ,Y,Φ)
détermine canoniquement une cubique marquée(C ,η).
52 4. AUTOMORPHISMES D’ENTROPIE POSITIVE ET GROUPES DE WEYL
2.3.3. Des cubiques aux surfaces.Réciproquement considérons une cubique marquée(C ,η).On dispose de points basespi ∈ C déterminés par(η(ei))1≤i≤n et un plongement deCdansP2(C) déterminé parη(e0). Soient(Z ,Φ) l’éclatement marqué avec points basespi
etY ⊂ Z la transformée stricte deC . On obtient ainsi une paire marquée(Z ,Φ,Y) qu’onappelle éclatement de(C ,η) et que l’on note Bl(C ,η).
Les constructions présentées au §2.3.2 et §2.3.3 sont inverses l’une de l’autre. En d’autrestermes on a l’énoncé suivant.
THÉORÈME 4.17 ([McM07]). Une paire marquée détermine canoniquement une cu-bique marquée et réciproquement.
3. Résultats et idée de démonstration
3.0.4. Énoncés.Dans [McM07] M CMULLEN produit des exemples d’automorphismesd’entropie positive à l’aide d’éléments du groupe de WEYL.
THÉORÈME4.18 ([McM07]). Pourn≥ 10, tout élément deCOXETER deWn peut êtreréalisé par un automorphismefn sur une surface rationnelle d’entropie positivelog(λn).
Plus précisément l’automorphismefn : Zn→ Zn peut être choisi de sorte– queZn soit le plan projectif complexe éclaté enn points distinctsp1, . . . , pn situés
sur une cubique cuspidaleC ,– qu’il existe une 2-forme méromorpheη surZn à pôles simples le long de la transfor-
mée propre deC qui ne s’annule pas,– que f ∗n (η) = λn ·η,– que(〈 fn〉,Zn) soit minimal au sens de MANIN 2.
Les trois premières propriétés déterminentfn de manière unique. Les pointspi admettentune description simple en termes de vecteurs propres ce qui permet de donner des formulespour fn.Notons que le plus petit nombre de SALEM connu est la racineλLehmer∼ 1.17628081 dupolynôme de LEHMER
L(t) = t10+ t9− t7− t6− t5− t4− t3 + t +1.
MCMULLEN montre que ce nombre est une borne inférieure pour l’entropie.
THÉORÈME4.19 ([McM07]). Si f est un automorphisme d’une surface complexe com-pacteZ d’entropie positive, l’entropie def est supérieure ou égale àlogλLehmer.
Constatant queλ10 = λLehmer, il obtient que cette borne inférieure est réalisée.
2. SoientZ une surface etG un sous-groupe de Aut(Z ). Une application birationnellef : Z 99K Z estdite G-équivariante siG = f G f−1 ⊂ Aut(Z ). Le couple(G,Z ) est minimal si tout morphisme birationnelG-équivariant est un isomorphisme.

4. EXEMPLES 53
COROLLAIRE 4.20 ([McM07]). La transformationf10: Z10→ Z10 est un automor-phisme d’une surface rationnelle d’entropie minimum.
On peut voir qu’un automorphisme sur un tore complexe ne peutpas avoir de disque deSIEGEL ; ce n’est pas le cas sur une surface K3 du moins si celle-ci estnon projective([McM02]). Dans le contexte des surfaces rationnelles MCMULLEN établit l’énoncé sui-vant.
THÉORÈME 4.21 ([McM07]). Il y a une infinité den pour lesquels l’élément standardde Wn peut être réalisé comme un automorphisme deP2(C) éclaté en un nombre fini depoints possédant un disque deSIEGEL.
3.0.5. Idée de démonstration.Les automorphismes construits pour établir les résultatsprécédents sont obtenus en éclatant des points bases situéssur une cubiqueC , les cubiquesjouant un rôle particulier du fait que leurs transformées propresY sont des courbes antica-noniques.Supposons que l’élémentw de Wn soit réalisé par un automorphismeF deZ préservantY.Comme on l’a vu au Théorème 4.17, à la paire marquée(Z ,Φ,Y) est canoniquement asso-ciée une cubique marquée(C ,η). Alors il existe une transformation birationnellef : P2(C) 99K P2(C)telle que : le relevé def àZ coïncide avecF, f préserveC et f induit un automorphismef∗de Pic0(C ) satisfaisantη0w = f∗η0. En d’autres termes[η0] est un point fixe pour l’actionnaturelle dew sur l’espace des modules des marquages.
Réciproquement pour réaliser un élement donnéw du groupe Wn on commence par cher-cher un point fixeη0 dans l’espace des modules des marquages. Le Corollaire 4.12associeà η0 une cubique marquée(C ,η) à isomorphisme près. Notons(Z ,Φ,Y) la paire marquéecanoniquement déterminée par(C ,η). Supposons que pour toutα dansΘn, η0(α) soit nonnul (ce qui est une condition générique) ; les points basespi ne satisfont pas de relation no-dale (ils sont tous distincts, il n’y en a pas 3 alignés, pas 6 sur une conique etc). Un théorèmede NAGATA assure alors l’existence d’une seconde projectionπ′ : Z → P2(C) correspon-dant au marquageΦw. Désignons parC ′ la cubiqueπ′(Y). Puisque[η0] est un point fixe dew, les cubiques marquées(C ′,ηw) et (C ,η) sont isomorphes. Mais un tel isomorphisme estun automorphismeF deZ satisfaisantF∗Φ = Φw.
Notons que dans [Hir88, Har85, PS81, Dil] il y a aussi des constructions faisant intervenirà la fois les automorphismes de surfaces et les cubiques.
4. Exemples
Considérons la famille de transformations birationnellesf : P2(C) 99K P2(C) donnée, dansla carte affinez= 1, par
f (x,y) =(
a+y,b+yx
), a, b∈C.

54 4. AUTOMORPHISMES D’ENTROPIE POSITIVE ET GROUPES DE WEYL
Notons que le casb =−a a été étudié dans [PS81] et [BR04].Les points d’indétermination def sont p1 = (0 : 0 : 1), p2 = (0 : 1 : 0) et p3 = (1 : 0 : 0).Posonsp4 = (a : b : 1) et désignons par∆ (resp.∆′) le triangle de sommetsp1, p2, p3 (resp.p2, p3, p4). La transformationf envoie∆ sur∆′ : le point p1 (resp.p2, resp.p3) est éclatésur la droite(p1p4) (resp.(p2p3), resp.(p3p4)) et les droites(p1p2) (resp.(p1p3), resp.(p2p3)) sont contractées surp2 (resp.p4, resp.p3).Si aetb sont choisis de sorte quep1 = p4, alors∆ est invariant parf et quitte à éclaterP2(C)en p1, p2, p3 on obtient une réalisation de l’élément standard de COXETER dans W3. Eneffet f envoie une droite générique sur une conique passant par lespi ; ainsiw(e0) = 2e0−e1−e2−e3. Le pointp1 (resp.p2, resp.p3) est éclaté sur la droite passant parp2 et p3 (resp.p1 et p3, resp.p1 et p2). Il s’en suit que
w(e1) = e0−e2−e3, w(e2) = e0−e1−e3, w(e3) = e0−e1−e2.
Plus généralement on a l’énoncé suivant.
THÉORÈME4.22 ([McM07]). Désignons parpi+4 l’itéré ième f i(p4) de p4.La réalisation de l’élément standard deCOXETER de Wn correspond aux couples(a,b)deC2 tels que
pi 6∈ (p1p2)∪ (p2p3)∪ (p3p1), pn+1 = p1.
Démonstration.Supposons qu’il existe un entieri tel que f i(p4) = pi+4. Soit (Z ,π)l’éclatement marqué de points basespi . La transformationf se relève en un morphismeF0 de Z dansP2(C). Comme toutpi est désormais l’imageF0(ℓi) d’une droite deZ , lemorphismeF0 se relève en un automorphismeF deZ , F satisfaisant la propriété suivante :f se relève enF. Déterminons l’élémentw réalisé parF. Remarquons quef envoie unedroite générique sur une conique passant parp2, p3 et p4 d’où w(e0) = 2e0−e2−e3−e4.Le point p1 est éclaté sur la droite passant parp3 et p4 doncw(e1) = e0−e3−e4; de mêmeon obtient
w(e2) = e0−e2−e4, w(e3) = e0−e2−e3, w(ei) = ei+1 pour 4≤ i < n et w(en) = e1.
Réciproquement si un automorphismeF : Z → Z réalise la transformation standard deCOXETER w = πnκ123, on peut normaliser les points bases de sorte que
p1, p2, p3= (0 : 0 : 1), (0 : 1 : 0), (1 : 0 : 0);la transformation birationnellef : P2(C) 99K P2(C) dont le relevé coïncide avecF est lacomposée de l’involution de CREMONA et d’un automorphisme envoyant(p1, p2) sur(p2, p3).Un tel f est, dans la carte affinez = 1, de la forme f (x,y) = (a′,b′) + (Ay,By/x) soit, àconjugaison près par(Bx,By/A), du type f (x,y) = (a,b)+ (y,y/x).
CHAPITRE 5
Exemples d’automorphismes d’entropie positive
Dans ce paragraphe nous présentons un exemple dû à BEDFORDet KIM ([BK06, BK09]).Une possibilité pour produire un automorphismef sur une surface rationnelleZ est la sui-vante : on part d’une transformation birationnellef deP2(C), on trouve une suite d’écla-tementsπ : Z → P2(C) telle que l’application induitefZ = π f π−1 soit un automorphismesurZ . La difficulté est de trouver une telle suiteπ... Si f n’est pas un automorphisme duplan projectif complexe,f contracte une courbeC1 sur un pointp1; la première chose à fairepour construire un automorphisme à partir def est d’éclater le pointp1 via π1 : Z1→P2(C).Dans le meilleur des casfZ1 = π1 f π−1
1 envoie la transformée deC1 sur le diviseur excep-tionnel E1. Mais sip1 n’est pas un point d’indéterminationfZ1 contracte E1 sur p2 = f (p1).Autrement dit ce procédé n’aboutit que sif n’est pas algébriquement stable ce qui va êtrele cas dans l’exemple qui suit.
Soit fa,b la transformation birationnelle deP2(C) définie par
fa,b(x,y,z) = (x(bx+y) : z(bx+y) : x(ax+z)),
soit en carte affine
fa,b(y,z) =
(z,
a+zb+y
).
On constate que Indfa,b = p1, p2, p∗ et que Excfa,b = Σ0∪Σβ∪Σγ avec
p1 = (0 : 1 : 0), p2 = (0 : 0 : 1), p∗ = (1 :−b :−a),
Σ0 = x = 0, Σβ = bx+y = 0, Σγ = ax+z= 0.
Plus précisémentΣ0 (resp.Σβ, resp.Σγ) est contracté surp1 (resp.p2, resp.q= (1 :−a : 0))et p2 (resp.p1, resp.q = (1 :−a : 0)) est éclaté surΣ0 (resp. sur la droiteΣB = z = 0passant par les pointsp1 etq, resp. sur la droiteΣC passant par les pointsp2 etq).
55
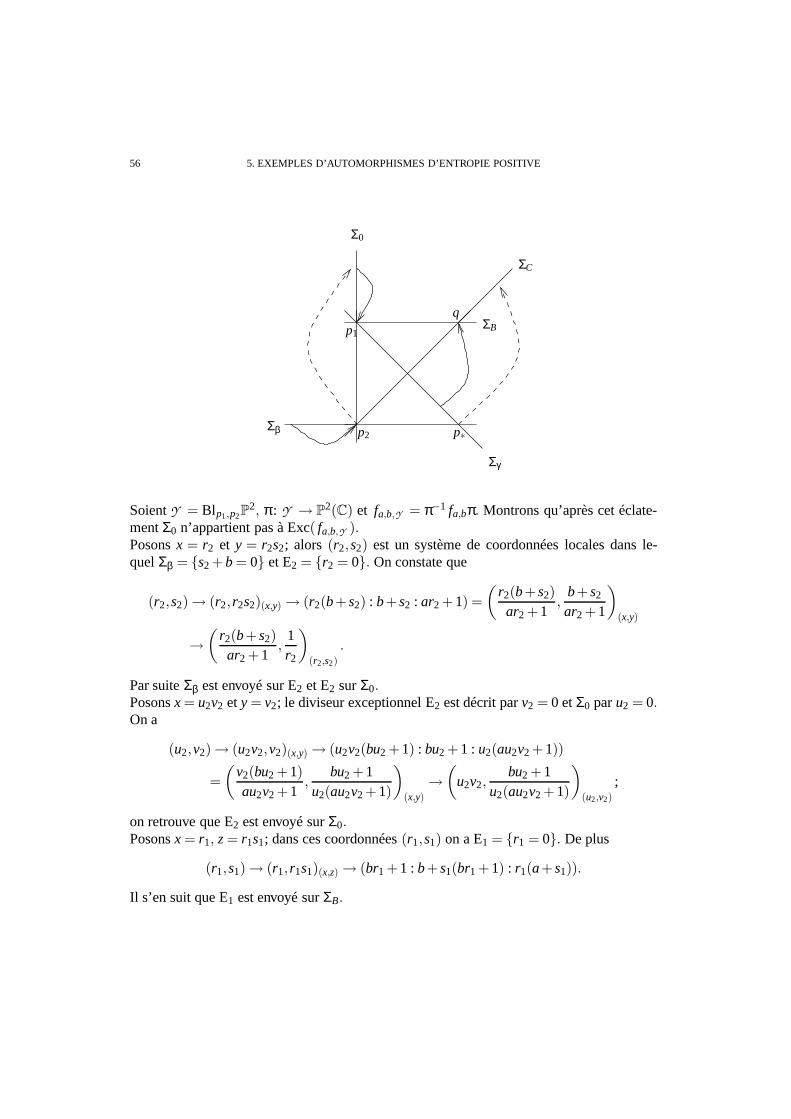
56 5. EXEMPLES D’AUTOMORPHISMES D’ENTROPIE POSITIVE
Σγ
ΣB
ΣC
Σ0
p∗p2
q
Σβ
p1
SoientY = Blp1,p2P2, π : Y → P2(C) et fa,b,Y = π−1 fa,bπ. Montrons qu’après cet éclate-
mentΣ0 n’appartient pas à Exc( fa,b,Y ).Posonsx = r2 et y = r2s2; alors (r2,s2) est un système de coordonnées locales dans le-quelΣβ = s2 +b = 0 et E2 = r2 = 0. On constate que
(r2,s2)→ (r2, r2s2)(x,y)→ (r2(b+s2) : b+s2 : ar2 +1) =
(r2(b+s2)
ar2 +1,
b+s2
ar2 +1
)
(x,y)
→(
r2(b+s2)
ar2 +1,
1r2
)
(r2,s2)
.
Par suiteΣβ est envoyé sur E2 et E2 surΣ0.Posonsx= u2v2 ety = v2; le diviseur exceptionnel E2 est décrit parv2 = 0 etΣ0 paru2 = 0.On a
(u2,v2)→ (u2v2,v2)(x,y)→ (u2v2(bu2 +1) : bu2 +1 : u2(au2v2 +1))
=
(v2(bu2 +1)
au2v2 +1,
bu2 +1u2(au2v2 +1)
)
(x,y)→
(u2v2,
bu2 +1u2(au2v2 +1)
)
(u2,v2)
;
on retrouve que E2 est envoyé surΣ0.Posonsx = r1, z= r1s1; dans ces coordonnées(r1,s1) on a E1 = r1 = 0. De plus
(r1,s1)→ (r1, r1s1)(x,z)→ (br1 +1 : b+s1(br1 +1) : r1(a+s1)).
Il s’en suit que E1 est envoyé surΣB.

5. EXEMPLES D’AUTOMORPHISMES D’ENTROPIE POSITIVE 57
Posonsx = u1v1 etz= v1; dans ces coordonnéesΣ0 = u1 = 0, E1 = v1 = 0 et
(u1,v1)→ (u1v1,v1)(x,z)→ (u1(bu1v1 +1) : bu1v1 +1 : u1v1(au1 +1))
=
(u1,
u1v1(au1 +1)
bu1v1 +1
)
(x,z)→
(u1,
v1(au1 +1)
bu1v1 +1
)
(r1,s1)
.
Il en résulte queΣ0→E1 et queΣβ→E2→ Σ0→E1→ ΣB. En particulier Indfa,b,Y = p∗et Excfa,b,Y = Σγ.On remarque queH, E1, E2 est une base de Pic(Y ). Le diviseur exceptionnel E1 est en-voyé surΣB; puisquep1 appartient àΣB on a E1→ ΣB→ ΣB+E1. Par ailleurs E2 est envoyésurΣ0; commep1 et p2 appartiennent àΣ0 on a E2→ Σ0→ Σ0+E1+E2. Soit H une droitegénérique deP2(C) d’équationℓ = 0 avecℓ = a0x+a1y+a2z. Son image parfa,b,Y est uneconique d’où
f ∗a,b,Y H = 2H+2
∑i=1
miEi.
Déterminons lesmi. Étant donné que
(r2,s2)→ (r2, r2s2)(x,y)→ (r2(b+s2) : b+s2 : ar2 +1)
→ r2
(a0r2(b+s2)+a1(b+s2)+a2(ar2 +1)
)
et que E2 = r2 = 0 l’entier m2 vaut 1. D’autre part
(r1,s1)→ (r1, r1s1)(x,z)→ (br1 +1 : b+s1(br1 +1) : r1(a+s1))
→ s1r1
(a0(bs1r1 +1)+a1s1(bs1r1 +1)+s1r1(a+s1)
)
et E1 = s1 = 0 d’où m1 = 1. Il s’en suit que
M fa,b,Y=
2 1 1−1 −1 −1−1 0 −1
.
Le polynôme caractéristique deM fa,b,Yest 1+ t − t3. Traduisons les renseignements que
contientM fa,b,Y. Soient L une droite etL sa classe dans Pic(Y ). Si L n’intersecte ni
E1, ni E2, alorsL= H. Puisquef ∗a,b,Y H = 2H−E1−E2 l’image de L parfa,b,Y est uneconique intersectant E1 et E2 avec multiplicité 1. Si L contientp∗, alors fa,b,Y (L) est l’uniondeΣC et d’une seconde droite. Supposons quep∗ n’appartienne pas à L∪ fa,b,Y (L), alors
f 2a,b,Y (L)= M2
fa,b
100
= 2H−E2;

58 5. EXEMPLES D’AUTOMORPHISMES D’ENTROPIE POSITIVE
autrement ditf 2a,b,Y (L) est une conique intersectant E2 mais pas E1. De même sip∗ n’ap-
partient pas à L∪ fa,b,Y (L)∪ f 2a,b,Y (L), alors
f 3a,b,Y (L)= M3
fa,b
100
= 3H−E1−E2,
i.e. f3a,b,Y (L) est une cubique intersectant E1 et E2 avec multiplicité 1. Si p∗ n’appartient
pas à L∪ fa,b,Y (L)∪ . . .∪ f n−1a,b,Y (L), les itérés defa,b,Y sont holomorphes au voisinage de
L et ( f ∗a,b,Y )n(H) = f na,b,Y L. Les paramètresa etb sont ditsgénériquessi p∗ n’appartient
pas àS∞
j=0 f ja,b,Y (L).
THÉORÈME 5.1 ([BK09]). Supposons quea et b soient génériques ; alorsfa,b,Y estalgébriquement stable etλ( fa,b) ∼ 1.324 est la plus grande valeur propre du polynômecaractéristiquet3− t−1.
1. Construction de surfaces et d’automorphismes
Considérons le sous-espaceVn deC2 défini par
Vn = (a,b) ∈ C2 | f ja,b,Y (q) 6= p∗ ∀0≤ j ≤ n−1, f n
a,b,Y (q) = p∗.L’énoncé suivant donne une condition nécessaire et suffisante pour quefa,b,Y soit un auto-morphisme sur une certaine surface rationnelle.
THÉORÈME5.2 ([BK09]). La transformationfa,b,Y est conjuguée à un automorphismed’une certaine surface rationnelle si et seulement si(a,b) appartient àVn pour un certainn.
Démonstration.Si (a,b) n’appartient pas àVn, le Théorème 5.1 assure queλ( fa,b) estla plus grande racine det3− t−1; on constate queλ( fa,b) n’est pas un nombre de SALEM
donc fa,b n’est pas conjugué à un automorphisme (Théorème 3.12).Réciproquement supposons qu’il existe un entiern tel que(a,b) appartienne àVn. Soit Zla surface obtenue à partir deY en éclatant les pointsq, fa,b,Y (q), . . . , f n
a,b,Y (q) = p∗ del’orbite de q. On peut vérifier que la transformation induitefa,b,Z est un automorphisme.
On s’intéresse maintenant àf ∗a,b,Z que nous noteronsf ∗a,b.
THÉORÈME 5.3 ([BK09]). Supposons que(a,b) appartienne àVn pour un certain en-tier n. Si n≤ 5, l’application fa,b est périodique de période inférieure ou égale à30. Si nvaut 6, la croissance des degrés defa,b est quadratique. Enfin sin≥ 7, alors(degf k
a,b)k aune croissance exponentielle etλ( fa,b) est la plus grande valeur propre du polynôme carac-téristique
χn(t) = tn+1(t3− t−1)+ t3+ t2−1.

2. COURBES INVARIANTES 59
De plus, lorsquen tend vers l’infiniλ( fa,b) tend vers la plus grande valeur propre det3−t−1.
L’action de fa,b,Z ∗ sur la cohomologie est donnée par
E2→ Σ0 = H−E1−E2→ E1→ ΣB = H−E1−Q
où Q désigne le diviseur obtenu en éclatant le pointq qui est surΣB. Par ailleursp∗ étantéclaté parfa,b surΣC, on a
Q→ fa,b(Q)→ . . .→ f na,b(Q)→ ΣC = H−E2−Q.
Finalement une droite générique L intersecteΣ0, Σβ et Σγ avec multiplicité 1; l’image deL est donc une conique passant parq, p1 et p2 d’où H→ 2H−E1−E2−Q. Ainsi dans labaseH, E1, E2, Q, fa,b(Q), . . . , f n
a,b(Q) on a
M fa,b =
2 1 1 0 0 . . . . . . 0 1−1 −1 −1 0 0 . . . . . . 0 0−1 0 −1 0 0 . . . . . . 0 −1−1 −1 0 0 0 . . . . . . 0 −10 0 0 1 0 . . . . . . 0 0
0 0 0 0 1 0 . . . 0...
......
...... 0
... . .....
......
......
......
. . . . .. 0 00 0 0 0 0 . . . 0 1 0
.
2. Courbes invariantes
Dans l’esprit de [DJS07] BEDFORD et KIM étudient les courbes invariantes parfa,b. Ilexiste des transformations rationnellesϕ j : C→ C2 telles que si(a,b) = ϕ j(t) pour uncertain complexet, alors fa,b a une courbe invarianteC ayant j composantes irréductibles.Posons
ϕ1(t) =
(t− t3− t4
1+2t + t2 ,1− t5
t2 + t3
), ϕ2(t) =
(t + t2+ t3
1+2t + t2 ,t3−1t + t2
), ϕ3(t) =
(1+ t,t− 1
t
).
THÉORÈME 5.4 ([BK09]). Soit t dansC \ −1, 1, 0, j , j2. Il existe une cubiqueCinvariante parfa,b si set seulement si(a,b) = ϕ j(t) pour un certain1≤ j ≤ 3 auquel casCest décrite par un polynôme homogènePt,a,b de degré3.

60 5. EXEMPLES D’AUTOMORPHISMES D’ENTROPIE POSITIVE
De plus, siPt,a,b existe, il est donné, à multiplication près par une constante, par
Pt,a,b(x,y,z) = ax3(t−1)t4+yz(t−1)t(z+ ty)+x(2byzt3+y2(t−1)t3+z2(t−1)(1+bt)
)
+x2(t−1)t3(
a(y+ tz)+ t(y+(t−2b)z)).
Plus précisément on a la description suivante.– Si (a,b) = ϕ1(t), alorsΓ1 = (Pt,a,b = 0) est une cubique irréductible cuspidale. La
transformationfa,b a deux points fixes dont l’un est le point singulier deC .– Si (a,b) = ϕ2(t), alors Γ2 = (Pt,a,b = 0) est l’union d’une conique et d’une droite
tangente à celle-ci. La transformationfa,b a, là aussi, deux points fixes.– Si(a,b) = ϕ3(t), alorsΓ3 = (Pt,a,b = 0) est l’union de trois droites concourantes ;fa,b
a encore deux points fixes dont l’un est le point d’intersection des trois composantesdeC .
Il existe un lien étroit entre les paramètres(a,b) pour lesquels il existe un complexet telqueϕ j(t) = (a,b) et les racines du polynôme caractéristiqueχn.
THÉORÈME 5.5 ([BK09]). Soientn un entier, j un entier compris entre1 et 3 et tun complexe. Supposons que(a,b) := ϕ j(t) n’appartienne à aucun desV k pour k < n.Alors (a,b) appartient àVn si et seulement sij divisen et t est une racine deχn.
On peut écrireχn sous la formeCnψn oùCn est le produit des facteurs cyclotomiques etψn
le polynôme minimal deλ( fa,b).
THÉORÈME5.6 ([BK09]). Supposons quen soit supérieur ou égal à7. Soit t une racinedeχn distincte de1. Alors ou bient est une racine deψn, ou bient est une racine deχ j pourun certain0≤ j ≤ 5.
En décrivant de manière précise ce qu’il se passe lorsquet n’est pas une racine deψn,BEDFORDet KIM montrent que le nombre d’éléments deΓ j ∩Vn est, pourn≥ 7, déterminépar le nombre de conjugués de GALOIS de l’unique racine deψn strictement supérieure à1 : si n≥ 7 et 1≤ j ≤ 3 divisen, alors
Γ j ∩Vn = ϕ j(t) | t racine deψn;en particulierΓ j ∩Vn n’est pas vide.SoientX une surface rationnelle etg un automorphisme surX . Le couple(X ,g) est ditminimal si tout morphisme birationnelπ : X → X ′ qui envoie(X ,g) sur (X ′,g′), où g′
est un automorphisme surX ′, est un isomorphisme. Rappelons une question posée dans[McM07]. SoientX une surface rationnelle etg un automorphisme surX . Supposons que(X ,g) soit minimal. Existe-t-il une puissance négative de la classe du diviseur canoniqueKX admettant une section holomorphe ? On sait depuis [Har87] que la réponse est négativesi on enlève l’hypothèse «(X ,g) minimal ».

3. DOMAINES DE ROTATION 61
THÉORÈME 5.7 ([BK09]). Il existe une surfaceZ et un automorphismefa,b sur Zd’entropie positive tels que(Z , fa,b) soit minimal et tels quefa,b ne possède pas de courbeinvariante.
Si g est un automorphisme sur une suface rationnelleX telle qu’une puissance négativede KX admette une section holomorphe,g préserve une courbe ; par conséquent le Théo-rème 5.7 répond à la question de MCMULLEN.
3. Domaines de rotation
Supposons quen soit supérieur ou égal à 7 auquel casfa,b n’est pas périodique ; s’il ya un domaine de rotation, son rang vaut 1 ou 2. Nous allons voir que les deux arrivent ;commençons par ceux de rang 1.
THÉORÈME 5.8 ([BK09]). Supposons quen soit supérieur ou égal à7, que j divisenet que(a,b) appartienne àΓ j ∩Vn. Il existe un complexet tel que(a,b) = ϕ j(t). Si t est unconjugué deGALOIS deλ( fa,b) distinct deλ( fa,b) et λ( fa,b)
−1, alors fa,b a un domaine derotation de rang1 centré en
(t3
1+ t,
t3
1+ t
)si j = 1,
(− t2
1+ t,− t2
1+ t
)si j = 2, (−t,−t) si j = 3.
Passons à ceux de rang 2.
THÉORÈME5.9 ([BK09]). Considérons un entiern supérieur ou égal à8, un entier j àvaleurs dans2, 3 qui divisen. Supposons que(a,b) = ϕ j(t) et que|t|= 1; supposons deplus quet soit une racine deψn. Notonsη1, η2 les valeurs propres deD fa,b au point
m=
(1+ t + t2
t + t2 ,1+ t + t2
t + t2
)si j = 2, m=
(1+
1t,1+
1t
)si j = 3.
Si η1 et η2 sont de module1, alors fa,b a un domaine de rotation de rang2 centré enm.
Il peut y avoir coexistence de domaines de rotation de rang 1 et 2.
THÉORÈME 5.10. Supposons quen soit supérieur ou égal à8, que j soit égal à2 ou 3et quej divisen. Il existe(a,b) dansΓ j ∩Vn tel que fa,b possède un domaine de rotation derang2 centré en
(1+ t + t2
t + t2 ,1+ t + t2
t + t2
)si j = 2,
(1+
1t,1+
1t
)si j = 3
ainsi qu’un domaine de rotation de rang1 centré en(− t2
1+ t,− t2
1+ t
)si j = 2, (−t,−t) si j = 3.

62 5. EXEMPLES D’AUTOMORPHISMES D’ENTROPIE POSITIVE
4. Groupe de WEYL
Rappelons que E1 et E2 sont les diviseurs obtenus en éclatantp1 et p2. Pour simplifierintroduisons les notations suivantes : E0 = H et E3 = Q, E4 = f (Q), . . . , En = f n−3(Q), πi
éclatement associé au diviseur Ei. Posons
e0 = E0, ei = (πi+1 . . .πn)∗Ei , 1≤ i ≤ n;
la basee0, . . . ,en de Pic(Z ) est géométrique.BEDFORD et KIM montrent qu’ils peuvent appliquer le Théorème 4.22 et en déduisentl’énoncé suivant.
THÉORÈME5.11 ([BK09]). SoientX une surface rationnelle obtenue en éclatantP2(C)en un nombre fini de pointsπ : X → P2(C) et F un automorphisme surX représentantl’élément standard du groupe deWEYL Wn avecn≥ 5. Il existe un automorphismeA deP2(C) et des complexesa etb tels que
fa,bAπ = AπF.
De plus ils obtiennent qu’une représentation de l’élément standard du groupe de WEYL peutêtre obtenue à partir defa,b,Y .
THÉORÈME 5.12 ([BK09]). SoientX une surface rationnelle etF un automorphismesurX représentant l’élément standard du groupe deWEYL Wn. Il existe
– une surfaceY obtenue en éclatantY en un nombre fini de points distinctsπ : Y → Y ,
– un automorphismeg sur Y ,– (a,b) dansVn−3
tels que(F,X ) soit conjugué à(g, Y ) et πg = fa,b,Y π.
5. Description des conditions pour obtenir un automorphisme
Dans [BK06] est étudiée la famille(FA,B) définie dans la cartex = 1 par
FA,B =
(z,
a0 +a1y+a2zb0 +b1y+b2z
), A = (a0,a1,a2), B = (b0,b1,b2);
on remarque que( fa,b) en est une sous-famille. On peut dans ce cadre définir des espacesde paramètresVn qui correspondent aux paramètres pour lesquels l’application n’est pasalgébriquement stable « aun-ième itéré ». Il y a une action de groupes naturels sur l’espacedes paramètresVn; en effet si(η,c,µ) appartient àC∗×C∗×C on a les actions suivantes
(a1) (u,v) 7→ (ηu,ηv)
(a2) (u,v) 7→ (u0,cu1,cu2,cv0,c2v1,c
2v2)
(a3) (u,v) 7→ (u0 +µ(u1 +u2)−µ(v0 +µ(v1 +v2)),u1−µv1,u2−µv2,v0 +µ(v1 +v2),v1,v2).

5. DESCRIPTION DES CONDITIONS POUR OBTENIR UN AUTOMORPHISME 63
La première action correspond à l’homogénéité deFA,B, les deux dernières à des actions parconjugaison linéaire surFA,B(
1c
y,1c
z
)FA,B(cy,cz) =
(z,
a0 +a1cy+a2czb0c+b1c2y+b2c2z
)
et
(y−µ,z−µ)FA,B(y+µ,z+µ)
=
(z,
a0 +µ(a1 +a2)−µ(b0 +µ(b1 +b2))+ (a1−µb1)y+(a2−µb2)zb0 +µ(b1 +b2)+b1y+b2z
).
L’ensembleVn est défini par la conditionf na,b(q) = p. Les coefficients des équations définis-
santVn sont des entiers positifs ; en particulierVn est invariant par conjugaison complexe.En exploitant ces équations BEDFORDet KIM obtiennent la description suivante ([BK06])
– V0 : orbite de(a,b) = (0,0) sous l’action dea1−a3.– V1 : orbite de(a,b) = (1,0) sous l’action dea1−a3.– V2 : orbite de(a,b) =
(1+i2 , i
).
– V3 : orbites de(
2−√
3+i2 , i
),(
2+√
3+i2 , i
)et de leurs conjugués.
– V4 : orbites de(a0,b0), (a1,b1), (a2,b2) et de leurs conjugués oùai (resp.bi) estune racine de 1−3x+9x2−24x3 +36x4−27x5 +9x6 (resp. 1+6x2 +9x4 +3x6).
– V5 : orbites de(a0,b0), (a1,b1), (a2,b2), (a3,b3) et de leurs conjugués oùai (resp.bi) est une racine de 1+3x2−20x3 +49x4−60x5+37x6−10x7+x8 (resp. 1+7x2+14x4 +8x6 +x8).
– V6 : les équations deV6 sont divisibles parb2 donc tous les couples de paramètres(a,0) aveca 6∈ 0, 1 appartiennent àV6; de plusV6 contient les orbites de
3±
√5+2i
√5±√
52
4, i
√5±√
52
et de leurs conjugués.


CHAPITRE 6
D’autres exemples
1. Familles continues d’automorphismes d’entropie positive
Dans [BKa] BEDFORDet KIM étudient la famille de transformations birationnelles définiedans la cartex = 1 par
f (y,z) =(
z,−y+cz+k−2
∑j=1
j pair
a j
y j +1yk
), a j ∈ C, c∈ R, k≥ 2.
1.1. Construction de surfaces rationnelles et d’automorphismes. Les auteurs construi-sent des surfaces en éclatantP2(C) en un nombre fini de points sur lesquellesf est conjuguéà un automorphisme d’entropie positive.
THÉORÈME6.1. Soient j, n deux entiers premiers entre eux tels que1≤ j ≤ n. Il existeun sous-ensemble non videCn de R tel que, pour toutk≥ 2 pair et pour tout(c,a j ) dansCn×C, la transformationf soit conjuguée à un automorphisme sur une certaine surfacerationnelle d’entropielogλn,k où logλn,k est la plus grande racine du polynôme
χn,k = 1−kn−1
∑j=1
x j +xn.
Disons un mot sur la construction deCn. La droite∆ = x= 0 est invariante parf . Écrivonsles points de∆ \(0 : 0 : 1) sous la forme(0 : 1 :w); alors f (0 : 1 :w) =
(0 : 1 :c− 1
w
).
La restriction def à ∆ coïncide avecg(w) = c− 1w. L’ensemble des valeurs dec pour
lesquellesg est périodique de périoden est
2cos( jπ/n) |0 < j < n, ( j,n) = 1.
Posonsws = gs−1(c) pour 1≤ s≤ n−1, autrement dit leswi codent l’orbite de(0 : 1 : 0)sous l’action def . Lesw j satisfont les propriétés suivantes
– w jwn−1− j = 1;– sin est pairw1 . . .wn−2 = 1;– sin est impair, posonsw∗(c) = w(n−1)/2 auquel casw1 . . .wn−2 = w∗.
65

66 6. D’AUTRES EXEMPLES
Nous allons détailler l’éventualitén= 3, k= 2, auquel casC3 = −1, 1. Supposons quec= 1;autrement dit
f = (xz2 : z3 : x3 +z3−yz2).
La transformationf contracte une seule droite∆′′ = z= 0 sur le pointR= (0 : 0 : 1) etéclate un seul point,Q = (0 : 1 : 0).Dans un premier temps nous allons éclaterQ à la source etRau but. Posons
x = u1
z= u1v1
E = u1 = 0∆′′1 = v1 = 0
x = a1
z= a1b1F = a1 = 0
x = r1s1
z= s1E = s1 = 0
x = c1d1
z= d1F = d1 = 0
On a
(u1,v1)→ (u1,u1v1)(x,z)→ (u1v21 : u1v3
1 : u1 +u1v31−v2
1)
=
(u1v2
1
u1 +u1v31−v2
1
,u1v3
1
u1 +u1v31−v2
1
)
(x,y)
→(
u1v21
u1 +u1v31−v2
1
,v1
)
(a1,b1)
et(r1,s1)→ (r1s1,s1)(x,z)→ (r1s1 : s2
1 : r31s1 +s1−1).
Par suite E est envoyé sur F, ∆′′1 est contracté surS= (0,0)(a1,b1) et Q1 = (0,0)(u1,v1) est unpoint d’indétermination.Poursuivons en éclatantQ1 à la source etSau but
u1 = u2
v1 = u2v2G = u2 = 0
a1 = a2
b1 = a2b2H = a2 = 0
u1 = r2s2
v1 = s2G = s2 = 0
a1 = c2d2
b1 = d2H = d2 = 0
On a dans les différents systèmes de coordonnées
(u2,v2)→ (u2,u2v2)(u1,v1)→ (u22v2
2 : u32v3
2 : 1+u32v3
2−v22) =
(u2
2v22
1+u32v3
2−v22
,u3
2v32
1+u32v3
2−v22
)
(x,y)
→(
u22v2
2
1+u32v3
2−v22
,u2v2
)
(a1,b1)
→(
u2v2
1+u32v3
2−v22
,u2v2
)
(c2,d2)
;
ainsi G est contracté surT = (0,0)(c2,d2) etU = (0,0)(r2,s2) est indéterminé. De plus on a
(u1,v1)→(
u1v21
u1 +u1v31−v2
1
,v1
)→
(u1v1
u1 +u1v31−v2
1
,v1
)
(c2,d2)
donc∆′′2 est contracté surT.

1. FAMILLES CONTINUES D’AUTOMORPHISMES D’ENTROPIE POSITIVE 67
Continuons en éclatantU à la source etT au but
r2 = u3
s2 = u3v3
K = u3 = 0G1 = v3 = 0
c2 = a3
d2 = a3b3L = a3 = 0
r2 = r3s3
s2 = s3K = s3 = 0
c2 = c3d3
d2 = d3L = d3 = 0
On constate que
(u3,v3)→ (u3,u3v3)(r2,s2)→ (u23v2
3 : u33v3
3 : 1+u33v3
3−v3)
=
(u2
3v23
1+u33v3
3−v3,
u33v3
3
1+u33v3
3−v3
)
(x,y)
→(
u23v2
3
1+u33v3
3−v3,u3v3
)
(a1,b1)
→(
u3v3
1+u33v3
3−v3,u3v3
)
(c2,d2)
→(
1
1+u33v3
3−v3,u3v3
)
(c3,d3)
et
(r3,s3)→ (r3s3,s3)(r2,s2)→ (r3s23 : r3s3
3 : r3 + r3s33−1);
par conséquentW = (1,0)(r3,s3) est indéterminé, K est envoyé sur L et G1 est contracté surV = (1,0)(c3,d3). Par ailleurs on note que
(u1,v1)→(
u1v1
u1 +u1v31−v2
1
,v1
)
(c2,d2)
→(
u1
u1 +u1v31−v2
1
,v1
)
(c3,d3)
ainsi∆′′3 est contracté surV.
ÉclatonsW à la source etV au but
r3 = u4 +1s3 = u4v4
M = u4 = 0
c3 = a4 +1d3 = a4b4
N = a4 = 0
r3 = r4s4 +1s3 = s4
M = s4 = 0
c3 = c4d4 +1d3 = d4
N = d4 = 0
D’une part
(u1,v1)→(
u1
u1 +u1v31−v2
1
,v1
)
(c3,d3)
→(
u21v1−v1
u1 +u1v31−v2
1
,v1
)
(c4,d4)
et
(u3,v3)→(
1
1+u33v3
3−v3,u3v3
)
(c3,d3)
→(
1−u33v3
u3(1+u33v3
3−v3),u3v3
)
(c4,d4)
dont on déduit que∆′′4 est contracté surX = (0,0)(c4,d4) et que G1 est envoyé sur N.

68 6. D’AUTRES EXEMPLES
D’autre part on a
(u4,v4)→ (u4 +1,u4v4)(r3,s3)→ (u4v24(u4 +1) : u3
4v34(u4 +1) : 1+u2
4v34(u4 +1))
=
(u4v2
4(u4 +1)
1+u24v3
4(u4 +1),
u34v3
4(u4 +1)
1+u24v3
4(u4 +1)
)
(x,y)
→(
u4v24(u4 +1)
1+u24v3
4(u4 +1),u4v4
)
(a1,b1)
→(
v4(u4 +1)
1+u24v3
4(u4 +1),u4v4
)
(c2,d2)
et
(r4,s4)→ (r4s4 +1,s4)(r3,s3)→ (s4(r4s4 +1) : s24(r4s4 +1) : r4 +(r4s4 +1)s2
4);
il en résulte queY = (0,0)(r4,s4) est indéterminé et M est envoyé sur H.Finalement éclatonsY à la source etX au but
r4 = u5
s4 = u5v5Λ = u5 = 0
c4 = a5
d4 = a5b5Ω = a5 = 0
r4 = r5s5
s4 = s5Λ = s5 = 0
c4 = c5d5
d4 = d5Ω = d5 = 0
Tout d’abord remarquons que∆′′5 est envoyé surΩ
(u1,v1)→(
u1v21−v1
u1 +u1v31−v2
1
,v1
)
(c4,d4)
→(
u1v1−1
u1 +u1v31−v2
1
,v1
)
(c5,d5)
.
Ensuite on a dans chacun des systèmes de coordonnées
(u5,v5)→ (u5,u5v5)(r4,s4)→ ((u25v5 +1)v5 : (u2
5v5 +1)u5v25 : 1+(u2
5v5 +1)u5v25)
et
(r5,s5)→ (r5s5,s5)(r4,s4)→ (r5s25 +1 : s5(r5s2
5 +1) : r5 +s5(r5s25 +1)).
En particulier on note queΛ est envoyé sur∆′′5.NotonsP1 (resp.P2) le point infiniment proche obtenu en éclatantQ, Q1,U, W etY (resp.R,S, T,V etX). Les calculs qui précèdent permettent d’affirmer quef induit un isomorphismeentre BlP1
P2 et BlP2P2 les composantes étant échangées comme suit
E→ F, ∆′′→Ω, K→ L, M→ H, Λ→ ∆′′, G→ N.
Pour qu’un conjugué def soit un automorphisme d’entropie positive surP2(C) éclaté enℓpoints il faut queℓ ≥ 10; on cherche donc un automorphismeA de P2(C) tel que(A f)2AenvoieP2 sur P1. On remarque quef (R) = (0 : 1 : 1) et f 2(R) = Q puis que f 2(P2) = P1
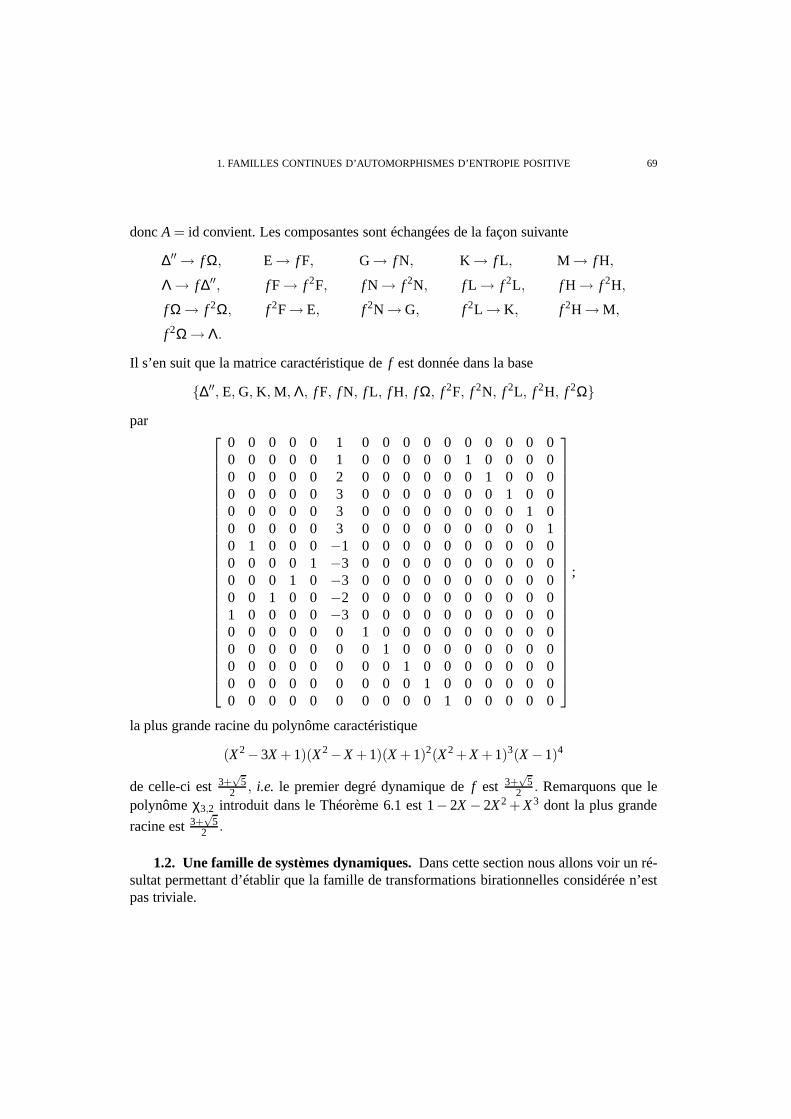
1. FAMILLES CONTINUES D’AUTOMORPHISMES D’ENTROPIE POSITIVE 69
doncA = id convient. Les composantes sont échangées de la façon suivante
∆′′→ f Ω, E→ f F, G→ f N, K→ f L, M→ f H,
Λ→ f ∆′′, f F→ f 2F, f N→ f 2N, f L→ f 2L, f H→ f 2H,
f Ω→ f 2Ω, f 2F→ E, f 2N→G, f 2L→ K, f 2H→M,
f 2Ω→ Λ.
Il s’en suit que la matrice caractéristique def est donnée dans la base
∆′′, E, G, K, M, Λ, f F, f N, f L, f H, f Ω, f 2F, f 2N, f 2L, f 2H, f 2Ω
par
0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 00 0 0 0 0 1 0 0 0 0 0 1 0 0 0 00 0 0 0 0 2 0 0 0 0 0 0 1 0 0 00 0 0 0 0 3 0 0 0 0 0 0 0 1 0 00 0 0 0 0 3 0 0 0 0 0 0 0 0 1 00 0 0 0 0 3 0 0 0 0 0 0 0 0 0 10 1 0 0 0 −1 0 0 0 0 0 0 0 0 0 00 0 0 0 1 −3 0 0 0 0 0 0 0 0 0 00 0 0 1 0 −3 0 0 0 0 0 0 0 0 0 00 0 1 0 0 −2 0 0 0 0 0 0 0 0 0 01 0 0 0 0 −3 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 1 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 1 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 1 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0
;
la plus grande racine du polynôme caractéristique
(X2−3X +1)(X2−X +1)(X +1)2(X2+X +1)3(X−1)4
de celle-ci est3+√
52 , i.e. le premier degré dynamique def est 3+
√5
2 . Remarquons que lepolynômeχ3,2 introduit dans le Théorème 6.1 est 1− 2X− 2X2 + X3 dont la plus grande
racine est3+√
52 .
1.2. Une famille de systèmes dynamiques.Dans cette section nous allons voir un ré-sultat permettant d’établir que la famille de transformations birationnelles considérée n’estpas triviale.

70 6. D’AUTRES EXEMPLES
THÉORÈME6.2 ([BKa]). À c fixé, la famille de transformations définies par
f (y,z) =(
z,−y+cz+k−2
∑j=1
j pair
a j
y j +1yk
), a j ∈ C, c∈ R,k≥ 2.
induit une famille de systèmes dynamiques de dimensionk/2−1.
La stratégie est la suivante. Un telf possèdek+1 points fixes que nous noteronsp1, . . . , pk+1.Posonsa = (a1, . . . ,ak−2). BEDFORD et KIM montrent que les valeurs propres deD fa aupoint p j(a) dépendent dea; il s’en suit que la famille varie aveca de manière non triviale.Plus précisément ils montrent que la trace deD fa varie de manière non triviale. Désignonsparτ j(a) la trace de la différentielleD fa au pointp j(a) et considérons l’applicationT défi-nie par
a→ T(a) = (τ1(a), . . . ,τk+1(a)).
1.2.1. Première étape.Le rang de l’applicationT est k2−1 au pointa = 0. En effet les
points fixes def sont de la forme(ξs,ξs) où ξs est une racine de
ξ = (c−1)ξ+k−2
∑j=1
j pair
a j
ξ j +1ξk . (6.1)
Lorsquea est nul, on a pour tout point fixeξk+1 = 12−c. En différenciant (6.1) par rapport
auxaℓ on obtient poura = 0 l’égalité(
2−c+k
ξk+1
)∂ξ∂aℓ
=1ξℓ
dont on déduit∂ξ∂aℓ
∣∣∣a=0
=1
(2−c)(k+1)ξℓ.
La trace deD f(y,z) est donnée par
τ = c−k−2
∑j=1
j pair
ja j
y j+1 −k
yk+1 .
Poury = ξa on a
∂τ(ξa)
∂aℓ
∣∣∣a=0
=− ℓ
yℓ+1 +k(k+1)
yk+2
∂ξa
∂aℓ=− ℓ
yℓ+1 +k
2−c1
ξk+1ξℓ+1 =− ℓ
yℓ+1 +k
yξℓ=
k− ℓ
ξℓ+1 .
Si ξ j parcourt lesk2 − 1 racines distinctes de 1
(2−c)k+1 , la matrice est essentiellement une
matrice de Vandermonde de taille( k2−1)× ( k
2−1) donc de rangk2−1.

1. FAMILLES CONTINUES D’AUTOMORPHISMES D’ENTROPIE POSITIVE 71
1.2.2. Deuxième étape.Désignons parfa une transformation du type
(z,−y+cz+
k−2
∑j=1
j pair
a j
y j +1yk
), a j ∈C, c∈ R,k≥ 2.
Il existe un voisinageU de 0 dansCk2−1 tel que pour tousa′, a′′ dansU aveca′ 6= a′′
l’application fa′ n’est pas difféomorphe àfa′′ . En effet, d’après ce qui précède l’applicationC
k2−1→ Ck+1, a 7→ T(a) est localement injective au voisinage de 0. De plus poura nul les
points fixesp1, . . . , pk+1, et donc les valeursτ1(0), . . . , τk+1(0) sont distinctes. Par suiteC
k2−1 ∋ a 7→ τ1(a), . . . ,τk+1(a) est localement injective en 0. Ainsi siU est un voisinage
suffisamment petit de 0 et sia′ et a′′ sont deux éléments distincts deU les ensembles demultiplicateurs aux points fixes ne sont pas les mêmes ; il s’en suit quefa′ et fa′′ ne sont pasdifféomorphes.
1.3. D’autres résultats. Soient f une transformation satisfaisant le Théorème 6.1 ; no-tonsZ f la surface sur laquellef est conjuguée à un automorphisme que l’on notera encorefpour simplifier. À l’aide de ce même théorème BEDFORD et KIM déterminent les courbesdeZ f invariantes parf (voir [BKa], Théorème 3.5). Ils en déduisent que sin > 2, alors( f ,Z f ) est minimal ; de plus sin = 2 il est minimal après avoir contracté∆ (voir [BKa],Théorème 3.6).À chaquef est donc associée une surface rationnelleZ = Z f sur laquellef est conjuguéeà un automorphisme. Une question naturelle est la suivante :que peut-on dire de Aut(Z ) ?Rappelons que cr est la représentation de Aut(Z ) dans GL(Pic(Z )) définie par (cf §1)
cr : Aut(Z )→GL(Pic(Z )), g 7→ g∗.
BEDFORDet KIM montrent que dans tous les cas qu’ils considèrent cr est au plus((k2−1) :1); de plus siak−2 est non nul, cr est fidèle. Lorsquen vaut 2, ils obtiennent le résultat suivantplus précis.
THÉORÈME6.3 ([BKa]). Supposons quen soit égal à2 et que
f (y,z) =(
z,−y+cz+k−2
∑j=1
j pair
a j
y j +1yk
), a j ∈ C, c∈ R,k≤ 2.
soit conjugué à un automorphisme sur une surface rationnelle d’entropielogλn,k où logλn,k
est la plus grande racine du polynômeχn,k = 1−kn−1
∑j=1
x j +xn.
Soientι la réflexion(x,y) 7→ (y,x) etcr : Aut(Z )→GL(Pic(Z )), g 7→ g∗.

72 6. D’AUTRES EXEMPLES
L’image decr est le sous-groupe deGL(Pic(Z )) constitué des isométries qui préservent àla fois la classe canonique deZ et l’ensemble des diviseurs effectifs ; ce sous-groupe est legroupe diédral infini de générateursf∗ et ι∗.
Ils en déduisent, toujours pourn = 2, que génériquement les surfacesZa ne sont pas biho-lomorphiquement équivalentes.
THÉORÈME6.4 ([BKa]). Supposons quen soit égal à2, quek soit pair et supérieur ouégal à4. Soienta dansCk/2−1 et fa une transformation du type
(z,−y+cz+
k−2
∑j=1
j pair
a j
y j +1yk
), a j ∈C, c∈ R,k≥ 2.
qui soit conjuguée à un automorphisme sur une surface rationnelleZa.Il existe un voisinageU de0 dansCk/2−1 tel que sia, a′ sont deux points distincts deU etsi ak−1 est non nul, alorsZa n’est pas biholomorphiquement équivalent àZa′ .
2. Dynamique des automorphismes d’entropie positive : domaines de rotation
Comme on l’a dit précédemment siZ est une surface complexe, compacte possédant unautomorphismef d’entropie topologique non nulle, un théorème de CANTAT assure qu’oubien la dimension de KODAIRA de Z est nulle et dans ce casf est conjugué à un auto-morphisme de l’unique modèle minimal deZ qui doit être un tore, une surface K3 ou unesurface d’ENRIQUES; ou bien la surfaceZ est rationnelle non minimale etf est biration-nellement conjuguée à une transformation birationnelle duplan ([Can99]). On a aussi vuque siZ est un tore complexe, l’ensemble de FATOU de f est vide. SiZ est une surface K3ou un quotient d’une surface K3, l’existence d’une forme volume invariante implique queles seules composantes de FATOU possibles sont les domaines de rotation. MCMULLEN amontré l’existence de surfaces K3 non algébriques avec des domaines de rotation de rang 2(voir [McM02]). Qu’en est-il siZ est une surface rationnelle non minimale ? Les automor-phismes d’entropie positive sur les surfaces rationnellesnon minimales peuvent posséderde « grands » domaines de rotation.
2.1. Énoncés.
THÉORÈME 6.5 ([BKb ]). Il existe une surface rationnelleZ possédant un automor-phisme d’entropie positiveh et un dommaine de rotationU . De plus,U est une union dedisques deSIEGEL invariants sur chacun desquelsh agit comme une rotation irrationnelle.
La linéarisation est un outil remarquable pour prouver l’existence de domaines de rotationsmais c’est une technique local. Afin de comprendre la nature globale de la composante deFATOU U , BEDFORDet KIM introduisent un modèle global et obtiennent le résultat suivant.

2. DYNAMIQUE DES AUTOMORPHISMES D’ENTROPIE POSITIVE : DOMAINES DE ROTATION 73
THÉORÈME 6.6 ([BKb ]). Il existe une surfaceL obtenue en éclatantP2(C) en unnombre fini de points, un automorphismeL surL , un domaineΩ deL et une conjugaisonbiholomorpheΦ : U → Ω qui envoie(h,U ) sur(L,L ).En particulier,h n’a pas de point périodique surU \z= 0.Les auteurs introduisent pourn, m≥ 1 le polynôme
χn,m(t) =t(tnm−1)(tn−2tn−1+1)
(tn−1)(t−1)+1.
Si n≥ 4, m≥ 1 ou sin = 3, m≥ 2 ce polynôme est un polynôme de SALEM . Soit δ uneracine deχn,m qui ne soit pas une racine de l’unité. Pour 1≤ j ≤ n−1, ( j,n) = 1 posons
c = 2√
δcos( jπ/n)
et considérons la transformation birationnellef donnée dans la carte affinez= 1 par
f (x,y) =
(y,−δx+cy+
1y
).
Les auteurs montrent le résultat suivant.
THÉORÈME6.7 ([BKb ]). Il existe une surface rationnelleZ obtenue en éclatantP2(C)en un nombre fini de pointsπ : Z → P2(C) telle queπ−1 f π soit un automorphisme deZ .De plus, l’entropie def est la plus grande racine du polynômeχn,m.
BEDFORDet KIM utilisent ensuite le couple( f k,Z ) pour démontrer les énoncés 6.5 et 6.6.
2.2. Construction des automorphismes et des surfaces.Nous allons détailler la construc-tion de la surfaceZ évoquée dans le Théorème 6.7.La transformationf s’écrit en coordonnées homogènes(y2 :−δxy+cy2+z2 : yz); elle éclateexactement un pointR= (1 : 0 : 0) et contracte exactement une droite∆′ = y = 0 sur lepoint Q = (0 : 1 : 0).Commençons par éclaterRà gauche etQ à droite
y = u1
z= u1v1E = u1 = 0
x = a1
z= a1b1F = a1 = 0
y = r1s1
z= s1
E = s1 = 0∆′1 = r1 = 0
x = c1d1
z= d1F = d1 = 0
On a d’une part
(u1,v1)→ (u1,u1v1)(y,z)→ (u1 :−δ+cu1+u1v21 : u1v1)
=
(u1
−δ+cu1 +u1v21
,u1v1
−δ+cu1+u1v21
)
(x,z)
→(
u1
−δ+cu1 +u1v21
,v1
)
(a1,b1)

74 6. D’AUTRES EXEMPLES
et d’autre part
(r1,s1)→ (r1s1,s1)(y,z)→ (r21s1 :−δr1 +cr2
1s21 +s1 : r1s1)
=
(r21s1
−δr1 +cr21s2
1 +s1,
r1s1
−δr1 +cr21s2
1 +s1
)
(x,z)
→(
r1,r1s1
−δr1 +cr21s2
1 +s1
)
(c1,d1)
.
Il s’en suit queP = (0,0)(r1,s1) est d’indétermination,∆′1 est contracté surS= (0,0)(c1,d1)
et E est envoyé sur F.Désormais on éclateP à gauche etSà droite
r1 = u2
s1 = u2v2G = u2 = 0
c1 = a2
d1 = a2b2H = a2 = 0
r1 = r2s2
s1 = s2G = s2 = 0
c1 = c2d2
d1 = d2H = d2 = 0
On constate que
(u2,v2)→ (u2,u2v2)(r1,s1)→ (u22v2 :−δ+cu3
2v22 +v2 : u2v2)
=
(u2
2v2
−δ+cu32v2
2 +v2,
u2v2
−δ+cu32v
22 +v2
)
(x,z)
→(
u2,u2v2
−δ+cu32v2
2 +v2
)
(c1,d1)
→(−δ+cu23v2
2 +v2
v2,
u2v2
−δ+cu23v22 +v2
)
(c2,d2)
et
(r2,s2)→ (r2s2,s2)(r1,s1)→ (r22s2
2 :−δr2 +cr22s3
2 +1 : r2s2)
=
(r22s2
2
−δr2 +cr22s3
2 +1,
r2s2
−δr2+cr22s3
2 +1
)
(x,z)
→(
r2s2,r2s2
−δr2 +cr22s3
2 +1
)
(c1,d1)
→(−δr2 +cr2
2s32 +1,
r2s2
−δr2 +cr22s3
2 +1
)
(c2,d2)
.
Ainsi G est envoyé sur H etT = (0,δ)(u2,v2) est d’indétermination.De plus
(y,z)→(
y2
−δy+cy2 +z2 ,yz
−δy+cy2+z2
)
(x,z)→
(yz,
yz−δy+cy2+z2
)
(c1,d1)
→(−δy+cy2+z2
z2 ,yz
−δy+cy2+z2
)
(c2,d2)
ce qui montre que∆′2 est contracté surU = (1,0)(c2,d2).
2. DYNAMIQUE DES AUTOMORPHISMES D’ENTROPIE POSITIVE : DOMAINES DE ROTATION 75
Pour finir éclatonsT à gauche etU à droite
u2 = u3
v2 = u3v3 + δ K = u3 = 0
c2 = a3 +1d2 = a3b3
L = a3 = 0
u2 = r3s3
v2 = s3 + δ G = s3 = 0
c2 = c3d3 +1d2 = d3
L = d3 = 0
On a
(u3,v3)→ (u3,u3v3 + δ)(u2,v2)→ (u3(u3v3 + δ) : v3 +cu23(u3v3 + δ)2 : u3v3 + δ)
=
(u3(u3v3 + δ)
v3 +cu23(u3v3 + δ)2
,u3v3 + δ
v3 +cu23(u3v3 + δ)2
)
(y,z)
→(
u3,u3v3 + δ
v3 +cu23(u3v3 + δ)2
)
(c1,d1)
et
(r3,s3)→ (r3s3,s3 + δ)(u2,v2)→ (r23s3(s3 + δ) : 1+cr3
3s23(s3 + δ)2 : r3(s3 + δ)).
Par suite K est envoyé sur∆ = x = 0.Enfin
(y,z)→(−δy+cy2+z2
z2 ,yz
−δy+cy2+z2
)
(c2,d2)
→(
cy2− δyz2 ,
z3
(cy− δ)(−δy+cy2+z2)
)
(a3,b3)
en particulier∆′3 est envoyé sur L.On peut donc énoncer le résultat suivant.
PROPOSITION 6.8. La transformationf induit un isomorphisme entreBlR,P,TP2 etBlQ,S,UP2.
Les différentes composantes sont échangées comme suit
E→ F, G→ H, K→ ∆, ∆′→ L.
Supposons quen = 4, que δ soit une racine deχ4,1 et quec = 2√
δcos(π/4) =√
2√
δalors f 4(Q) = R donc quitte à éclaterf i(Q), f i(S) et f i(U) pour i = 0, . . . ,3 la transforma-tion f est conjuguée à un automorphisme surP2(C) éclaté en ces 12 points. On a
∆′′→ f L, E→ f F, G→ f H, K→ f ∆, f F→ f 2F,
f H→ f 2H, f L→ f 2L, f 2F→ f 3F, f 2H→ f 3H, f 2L→ f 3L,
f 3F→ E, f 3H→G, f 3L→ K.
Autrement dit la matrice def ∗ dans la base
∆′, E, G, K, f F, f H, f L, f 2F, f 2H, f 2L, f 3F, f 3H, f 3L
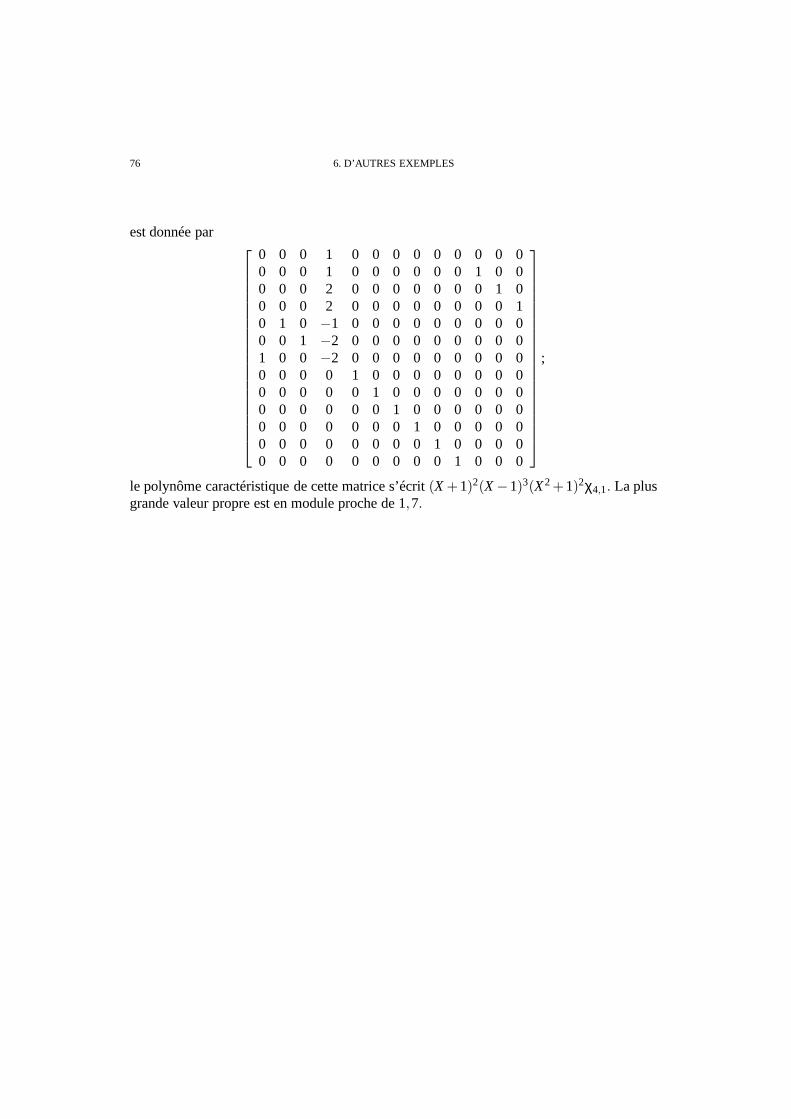
76 6. D’AUTRES EXEMPLES
est donnée par
0 0 0 1 0 0 0 0 0 0 0 0 00 0 0 1 0 0 0 0 0 0 1 0 00 0 0 2 0 0 0 0 0 0 0 1 00 0 0 2 0 0 0 0 0 0 0 0 10 1 0 −1 0 0 0 0 0 0 0 0 00 0 1 −2 0 0 0 0 0 0 0 0 01 0 0 −2 0 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 0 00 0 0 0 0 1 0 0 0 0 0 0 00 0 0 0 0 0 1 0 0 0 0 0 00 0 0 0 0 0 0 1 0 0 0 0 00 0 0 0 0 0 0 0 1 0 0 0 00 0 0 0 0 0 0 0 0 1 0 0 0
;
le polynôme caractéristique de cette matrice s’écrit(X +1)2(X−1)3(X2+1)2χ4,1. La plusgrande valeur propre est en module proche de 1,7.

CHAPITRE 7
Une autre façon de construire des automorphismes d’entropiepositive
Dans [DG10] les auteurs s’intéressent, entre autres, à la transformation
Φn = (xzn−1 +yn : yzn−1 : zn), n≥ 3.
Dans ce chapitre nous allons reprendre quelques-uns de leurs résultats ; pour simplifier lescalculs nous supposerons quen= 3 et on désignera parΦ la transformationΦ3. On constateque la suite(degΦn)n∈N est bornée (Φk = (x+ ky3,y) dans la carte affinez= 1), doncΦest conjugué à un automorphisme sur une certaine surface rationnelleZ et un itéré deΦest conjugué à un automorphisme isotope à l’identité. La transformationΦ éclate un uniquepoint P = (1 : 0 : 0) et contracte une unique droite∆ = z= 0.
1. Construction
La première étape est la construction de deux pointsP1 et P2 infiniment proches deP telsqueΦ induise un isomorphisme entreP2(C) éclaté enP1 etP2(C) éclaté enP2. La secondeétape consiste à trouver des automorphismesϕ de P2(C) tels queP1, ϕP2, ϕΦϕP2 soientà supports distincts etP1 = (ϕΦ)2ϕP2 donc tels que(ϕΦ)2 induise un automorphisme deP2(C) éclaté enP1, ϕP2, ϕΦϕP2.
1.1. Définitions deP1, P2. Commençons par éclater le pointP :
∆1
P1
E
Q
77

78 7. UNE AUTRE FAÇON DE CONSTRUIRE DES AUTOMORPHISMES D’ENTROPIE POSITIVE
Posonsy = u1 et z = u1v1; on remarque que(u1,v1) sont des coordonnées au voisinagede P1 = (0,0)(u1,v1) dans lesquelles le diviseur exceptionnel est E= u1 = 0 et la trans-formée de∆ est donnée par∆1 = v1 = 0. Posonsy = r1s1 et z= s1; notons que(r1,s1)sont des coordonnées au voisinage deQ = (0,0)(r1,s1) dans lesquelles E= s1 = 0. Onremarque que
(u1,v1)→ (u1,u1v1)(y,z)→ (v21 +u1 : v2
1u1 : v31u1)
=
(v2
1u1
v21 +u1
,v3
1u1
v21 +u1
)
(y,z)
→(
v21u1
v21 +u1
,v1
)
(u1,v1)
et
(r1,s1)→ (r1s1,s1)(y,z)→ (1+ r31s1 : r1s1 : s1)
=
(r1s1
1+ r31s1
,s1
1+ r31s1
)
(y,z)
→(
r1,s1
1+ r31s1
)
(r1,s1)
;
il en résulte queP1 est un point d’indétermination,∆1 est contracté surP1 et E est fixé.ÉclatonsP1 :
∆2
P2
AE1
F
Posonsu1 = u2 et v1 = u2v2. Remarquons que(u2,v2) sont des coordonnées au voisinagede P2 = (0,0)(u2,v2) dans lesquelles∆2 = v2 = 0 et F= u2 = 0. Si on poseu1 = r2s2
et v1 = s2 alors (r2,s2) sont des coordonnées au voisinage deA = (0,0)(r2,s2); dans cescoordonnées F= s2 = 0. De plus
(u2,v2)→ (u2,u2v2)(u1,v1)→ (1+u2v22 : u2
2v22 : u3
2v32)
et
(r2,s2)→ (r2s2,s2)(r1,s1)→ (r2 +s2 : r2s22 : r2s3
2).
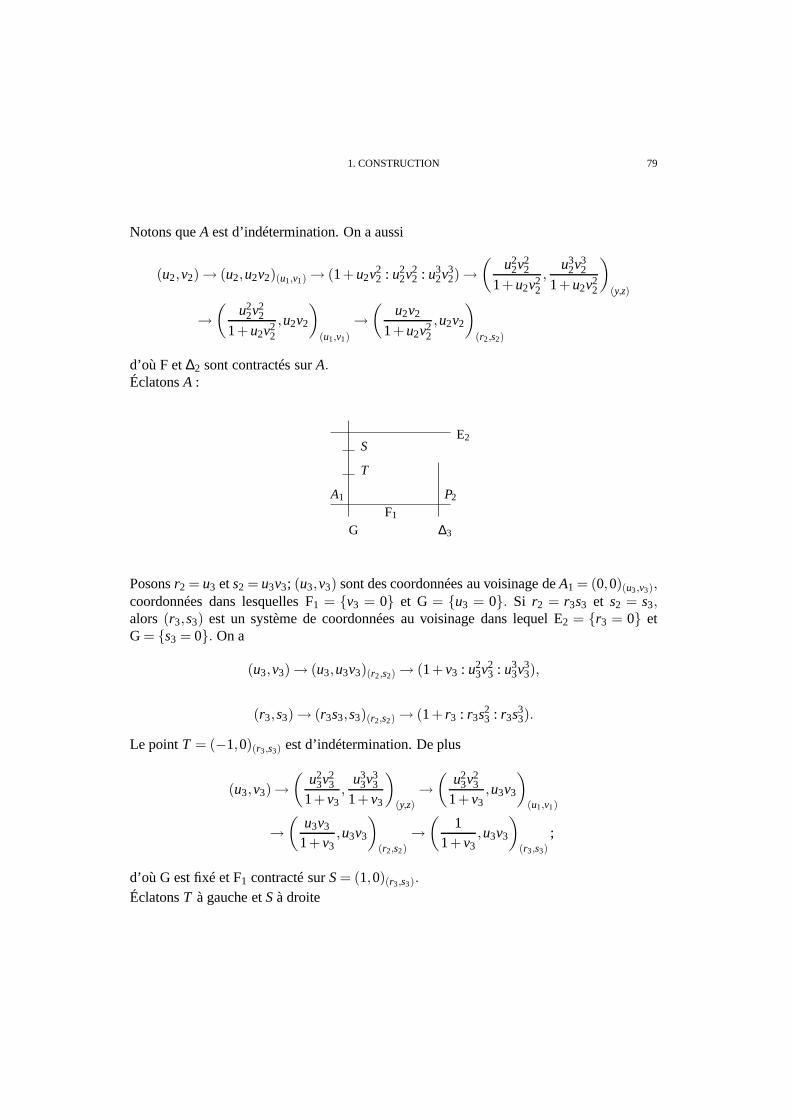
1. CONSTRUCTION 79
Notons queA est d’indétermination. On a aussi
(u2,v2)→ (u2,u2v2)(u1,v1)→ (1+u2v22 : u2
2v22 : u3
2v32)→
(u2
2v22
1+u2v22
,u3
2v32
1+u2v22
)
(y,z)
→(
u22v2
2
1+u2v22
,u2v2
)
(u1,v1)
→(
u2v2
1+u2v22
,u2v2
)
(r2,s2)
d’où F et∆2 sont contractés surA.ÉclatonsA :
A1 P2
∆3
E2
F1
G
T
S
Posonsr2 = u3 ets2 = u3v3; (u3,v3) sont des coordonnées au voisinage deA1 = (0,0)(u3,v3),coordonnées dans lesquelles F1 = v3 = 0 et G= u3 = 0. Si r2 = r3s3 et s2 = s3,alors (r3,s3) est un système de coordonnées au voisinage dans lequel E2 = r3 = 0 etG = s3 = 0. On a
(u3,v3)→ (u3,u3v3)(r2,s2)→ (1+v3 : u23v2
3 : u33v3
3),
(r3,s3)→ (r3s3,s3)(r2,s2)→ (1+ r3 : r3s23 : r3s3
3).
Le pointT = (−1,0)(r3,s3) est d’indétermination. De plus
(u3,v3)→(
u23v2
3
1+v3,
u33v3
3
1+v3
)
(y,z)→
(u2
3v23
1+v3,u3v3
)
(u1,v1)
→(
u3v3
1+v3,u3v3
)
(r2,s2)
→(
11+v3
,u3v3
)
(r3,s3)
;
d’où G est fixé et F1 contracté surS= (1,0)(r3,s3).
ÉclatonsT à gauche etSà droite

80 7. UNE AUTRE FAÇON DE CONSTRUIRE DES AUTOMORPHISMES D’ENTROPIE POSITIVE
∆4
P4A2
E3
F2
H
G1
T1 B
∆′4
P′4F′2
E′3
G1
A′2
CS1K
Posonsr3 = u4−1 ets3 = u4v4; dans le système de coordonnées(u4,v4) on a G1 = v4 = 0et H= u4 = 0. Notons aussi que(r4,s4), où r3 = r4s4−1 ets3 = s4, est un système decoordonnées dans lequel H= s4 = 0. D’une part
(u4,v4)→ (u4−1,u4v4)(r3,s3)→ ((u4−1)u4v24,(u4−1)u2
4v34)(y,z)
→ ((u4−1)u4v24,u4v4)(u1,v1)→ ((u4−1)v4,u4v4)(r2,s2)→
((u4−1)v4,
u4
u4−1
)
(u3,v3)
par suite H est envoyé sur F2;d’autre part
(r4,s4)→ (r4s4−1,s4)(r3,s3)→ (r4 : (r4s4−1)s4 : (r4s4−1)s24);
il s’en suit queB = (0,0)(r4,s4) est d’indétermination.
Posonsr3 = a4+1, s3 = a4b4; (a4,b4) sont des coordonnées dans lesquelles G1 = b4 = 0et K = a4 = 0. On peut aussi poserr3 = c4d4 + 1 ets3 = d4 auquel cas(c4,d4) sont descoordonnées dans lesquelles K est donné pard4 = 0.Remarquons que
(u3,v3)→(
11+v3
,u3v3
)
(r3,s3)
→(− v3
1+v3,−u3(1+v3)
)
(a4,b4)
;
par suite F2 est envoyé sur K.On constate que
(u1,v1)→ (v21 +u1 : u1v2
1 : u1v31) =
(u1v2
1
u1 +v21
,u1v3
1
u1 +v21
)
(y,z)
→(
u1v21
u1 +v21
,v1
)
(u1,v1)
→(
u1v1
u1 +v21
,v1
)
(r2,s2)
→(
u1
u1 +v21
,v1
)
(r3,s3)
→(− v1
u1 +v21
,v1
)
(c4,d4)
;
ainsi∆4 est contracté surC = (0,0)(c4,d4).Maintenant éclatonsB à gauche etC à droite.

1. CONSTRUCTION 81
A3
∆5
F3G2
T2 L
E4H1
B1
P5
∆′5F′3
E′4
G2
C1K1
M
P′5
Posonsr4 = u5, s4 = u5v5 et r4 = r5s5, s4 = s5. Alors (u5,v5) (resp.(r5,s5)) est un systèmede coordonnées dans lequel L= u5 = 0 (resp. H1 = v5 = 0 et L = s5 = 0). Notonsque
(u5,v5)→ (u5,u5v5)r4,s4 → (1 : v5(u25v5−1) : u5v2
5(u25v5−1))
etr5,s5)→ (r5s5,s5)r4,s4→ (r5 : r5s2
5−1 : s5(r5s25−1)).
On en déduit que L est envoyé sur∆5 et qu’il n’y a pas de point d’indétermination.Posonsc4 = a5, d4 = a5b5 etc4 = c5d5, d4 = d5. Dans le premier (resp. second) système decoordonnées le diviseur exceptionnel M est donné para5 = 0 (resp.d5 = 0). Notonsque
(u1,v1)→(− v1
u1 +v21
,v1
)
(c4,d4)
→(− 1
u1 +v21
,v1
)
(c5,d5)
;
en particulier∆5 est envoyé sur M.La construction qui précède permet d’énoncer le résultat suivant.
PROPOSITION7.1 ([DG10]). Soit P1 (resp.P2) le point infiniment proche deP obtenuen éclatantP2(C) at P, P1, A, T etU (resp.P, P1, A, SetU ′).La transformationΦ induit un isomorphisme entreBlP1
P2 etBlP2P2.
Les différentes composantes sont échangées comme suit
∆→M, E→ E, F→ K, G→G, H→ F, L→ ∆.
Soit ϕ un automorphisme deP2(C). Dans le paragraphe qui suit on va ajusterϕ de sorteque(ϕΦ)2ϕ envoieP1 surP2.
1.2. Conditions de recollement.Soitgun germe de biholomorphisme de(C2,0) donnépar
g(y,z) =(
∑0≤i, j≤4
mi, jyizj , ∑
0≤i, j≤4
ni, j yizj
)+o(||(y,z)||4).
On remarque queg(0,0) = (m0,0,n0,0) doncg(P) = P si et seulement sim0,0 = n0,0 = 0.Dorénavant nous supposerons quem0,0 = n0,0 = 0. Désignons parg1 (resp.g2) la première(resp. seconde) composante deg.

82 7. UNE AUTRE FAÇON DE CONSTRUIRE DES AUTOMORPHISMES D’ENTROPIE POSITIVE
Posonsy = u1 etz= u1v1. Considérons la transformationg1 donnée par
g1(u1,v1) =
(g1(u1,u1v1),
g2(u1,u1v1)
g1(u1,u1v1)
).
On remarque queg1(0,0) =(
0,n1,0
m1,0
); ainsi g1(0,0) = (0,0) si et seulement sin1,0 = 0.
Supposons dans la suite quen1,0 = 0.Posonsu1 = r2s2 etv1 = s2. On définitg2 par
g2(r2,s2) =
(g1
1(r2s2,s2)
g21(r2s2,s2)
,g21(r2s2,s2)
).
Alors g2(0,0) = (0,0), i.e. g2(A) = A.Posonsr2 = r3s3 ets2 = s3. Soitg3 la transformation donnée par
g3(sr3,s3) =
(g1
2(r3s3,s3)
g22(r3s3,s3)
,g22(r3s3,s3)
).
On peut vérifier queg3(1,0)=
(m3
1,0
n20,1
,0
). Il s’en suit queg3(S)= T si et seulement si
m31,0
n20,1
= −1.
Supposons quem1,0 = t2 et quen0,1 = it3 auquel casm3
1,0
n20,1
= −1.
Finalement sir3 = r4s4 +1 ets3 = s4, on pose
g4(r4,s4) =
(g1
3(r4s4 +1,s4)+1
g23(r4s4 +1,s4)
,g23(r4s4 +1,s4)
).
On note queg4(0,0) =(
i(3m0,1t+2in2,0)t4 ,0
). On en déduit queg4(0,0) = (0,0) si et seulement
si 3m0,1t +2in2,0 = 0.Ceci permet d’énoncer la proposition qui suit.
PROPOSITION7.2 ([DG10]). Un germeg de biholomorphisme de(C2,0) donné par
g(y,z) =(
∑0≤i, j≤4
mi, jyizj , ∑
0≤i, j≤4
ni, jyizj
)+o(||(y,z)||4)
envoieP2 surP1 si et seulement si
m0,0 = n0,0 = 0, n1,0 = 0, m1,0 = t2, n0,1 = it3, 3m0,1t +2in2,0 = 0.
2. Une première famille d’automorphismes
La construction détaillée précédemment permet d’exhiber des familles d’automorphismesd’entropie positive. Avant de donner celle-ci introduisons la notion suivante. SoientU unouvert deCd, ϕ : U → PGL(3;C) une transformation holomorphe etf une transforma-tion de CREMONA. La famille de transformations birationnelles(ϕα1, ...,αn f )(α1, ...,αn)∈U est
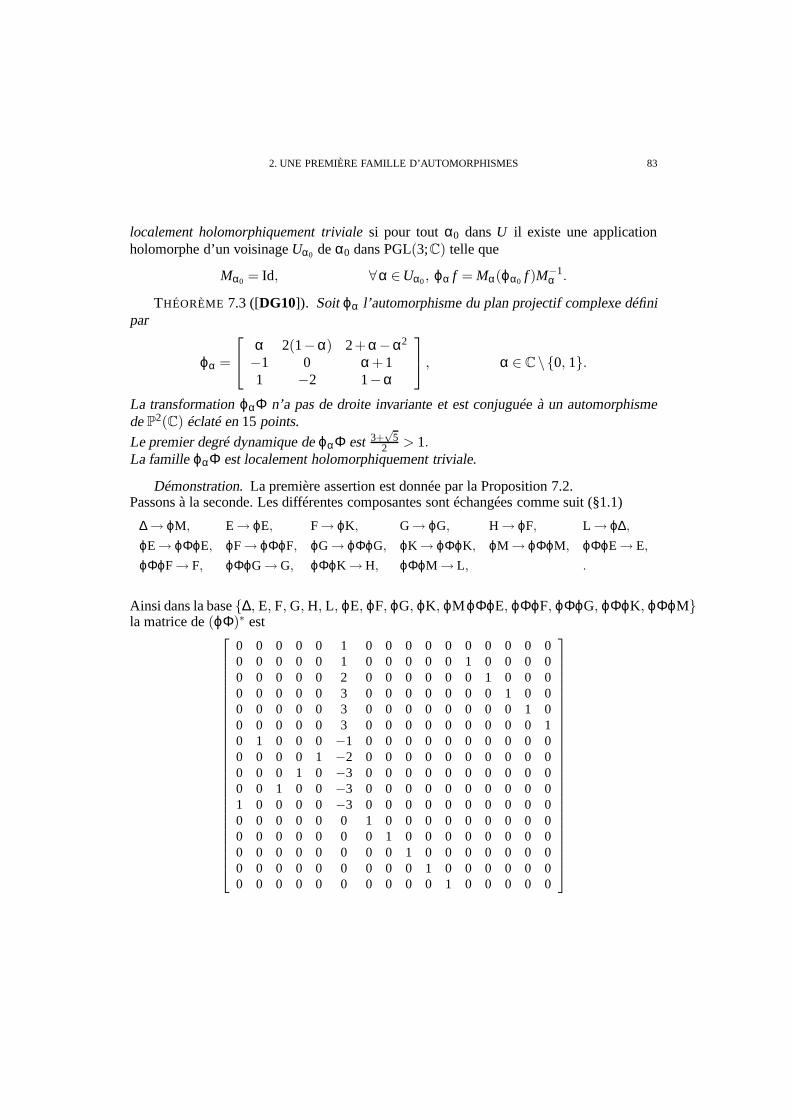
2. UNE PREMIÈRE FAMILLE D’AUTOMORPHISMES 83
localement holomorphiquement trivialesi pour toutα0 dansU il existe une applicationholomorphe d’un voisinageUα0 deα0 dans PGL(3;C) telle que
Mα0 = Id, ∀α ∈Uα0, ϕα f = Mα(ϕα0 f )M−1α .
THÉORÈME7.3 ([DG10]). Soit ϕα l’automorphisme du plan projectif complexe définipar
ϕα =
α 2(1−α) 2+ α−α2
−1 0 α+11 −2 1−α
, α ∈ C\0, 1.
La transformationϕαΦ n’a pas de droite invariante et est conjuguée à un automorphismedeP2(C) éclaté en15 points.Le premier degré dynamique deϕαΦ est 3+
√5
2 > 1.La famille ϕαΦ est localement holomorphiquement triviale.
Démonstration.La première assertion est donnée par la Proposition 7.2.Passons à la seconde. Les différentes composantes sont échangées comme suit (§1.1)
∆→ ϕM, E→ ϕE, F→ ϕK, G→ ϕG, H→ ϕF, L→ ϕ∆,
ϕE→ ϕΦϕE, ϕF→ ϕΦϕF, ϕG→ ϕΦϕG, ϕK→ ϕΦϕK, ϕM→ ϕΦϕM, ϕΦϕE→ E,
ϕΦϕF→ F, ϕΦϕG→G, ϕΦϕK→H, ϕΦϕM→ L, .
Ainsi dans la base∆, E, F, G, H, L, ϕE, ϕF, ϕG, ϕK, ϕM ϕΦϕE, ϕΦϕF, ϕΦϕG, ϕΦϕK, ϕΦϕMla matrice de(ϕΦ)∗ est
0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 00 0 0 0 0 1 0 0 0 0 0 1 0 0 0 00 0 0 0 0 2 0 0 0 0 0 0 1 0 0 00 0 0 0 0 3 0 0 0 0 0 0 0 1 0 00 0 0 0 0 3 0 0 0 0 0 0 0 0 1 00 0 0 0 0 3 0 0 0 0 0 0 0 0 0 10 1 0 0 0 −1 0 0 0 0 0 0 0 0 0 00 0 0 0 1 −2 0 0 0 0 0 0 0 0 0 00 0 0 1 0 −3 0 0 0 0 0 0 0 0 0 00 0 1 0 0 −3 0 0 0 0 0 0 0 0 0 01 0 0 0 0 −3 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 1 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 1 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 1 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0

84 7. UNE AUTRE FAÇON DE CONSTRUIRE DES AUTOMORPHISMES D’ENTROPIE POSITIVE
et son polynôme caractéristique est donné par
(X2−3X +1)(X2−X +1)(X +1)2(X2 +X +1)3(X−1)4.
Ainsi
λ(ϕΦ) =3+√
52
> 1.
Reste à justifier la dernière assertion : soitα0 dansC \0, 1. On peut trouver localementautour deα0 une matriceMα dépendant holomorphiquement deα et tel que pour toutαproche deα0 on aitϕαΦ = M−1
α ϕα0ΦMα. La matrice
Mα =
1 0 α0−α0 1 00 0 1
convient.
3. D’autres exemples
Comme on l’a déjà mentionné, la construction détaillée précédemment est dans [DG10]faite pourΦ = (xzn−1 +yn : yzn−1 : zn) pourn≥ 3. On peut donc obtenir des familles d’au-tomorphismes d’entropie positive pourn≥ 3.
THÉORÈME7.4 ([DG10]). Supposons quen≥ 3 et que
ϕα,β =
1 2βα − 1+δk+δ2
kα
0 −1 0α β δk
avecα ∈ C∗, β ∈ C et δk = exp(
(2k+1)iπ3n
)−1, 0≤ k≤ 3n−1.
La transformationϕα,βΦ est conjuguée à un automorphisme deP2(C) éclaté en3(2n−1)points.Le premier degré dynamique deϕα,βΦ estλ(ϕα,βΦ) = n+
√n2−42 > 1.
La famille ϕα,βΦ est localement holomorphiquement triviale.
THÉORÈME7.5 ([DG10]). Supposons quen≥ 4 et
ϕα,β,γ,δ =
α β β(γ2εk−α2)δ(α−γ)
0 γ 0δ(α−γ)
β δ −α
avecα, β ∈C, γ, δ ∈C∗, α 6= γ, εk = exp((2k+1)iπ
n
), 0≤ k≤ n−1.
La transformationϕα,β,γ,δΦ est conjuguée à un automorphisme deP2(C) éclaté en4n− 2points.

3. D’AUTRES EXEMPLES 85
Le premier degré dynamique deϕα,β,γ,δΦ estλ(ϕα,β,γ,δΦ) =(n−1)+
√(n−1)2−4
2 > 1.La famille ϕα,β,γ,δΦ est localement holomorphiquement triviale.
De plus, dans [DG10], les auteurs utilisent la même méthode avec une transformation bira-tionnelle qui contracte une droite et une conique et obtiennent là encore une famille d’auto-morphismes d’entropie positive sur le plan projectif éclaté en un nombre fini de points.
THÉORÈME7.6. Soient f = (y2z : x(xz+y2) : y(xz+y2)) et
ϕα =
2α3
343(37i√
3+3) α −2α2
49 (5i√
3+11)α2
49(−15+11i√
3) 1 − α14(5i√
3+11)−α
7 (2i√
3+3) 0 0
avecα ∈ C∗.La transformationϕα f est conjuguée à un automorphisme deP2(C) éclaté en15points.Le premier degré dynamique deϕα f est 3+
√5
2 > 1.La famille ϕαΦ est localement holomorphiquement triviale.

Index
algébriquement stable 10, 17anneau de HERMAN 40automorphisme de HÉNON généralisé 5automorphisme de type élémentaire 6automorphisme de type HÉNON 6automorphisme polynomial deC2 5base géométrique 43bassin 40composante de FATOU récurrente 40configuration exceptionnelle 43couple(X ,g) minimal 60courbes contractées 8cubique 48cubique marquée 48degré algébrique d’un automorphisme polynomial 6degré algébrique 10degré dynamique d’une transformation birationnelle 10degré dynamique sur une surface complexe compacte kählérienne 16dimension de KODAIRA-I ITAKA 23dimension de KODAIRA 23disque de SIEGEL 40diviseur 18diviseur exceptionnel 9domaine de rotation 39dominante (application) 17éclatement d’une variété 9éclatement marqué 49entropie topologique 26ensemble critique 17ensemble d’indétermination 8, 17ensemble exceptionnel 8, 17
87
88 INDEX
ensemble de FATOU 39élément de COXETER 44élément standard du groupe de WEYL 44formellement linéarisable 25foyer 40groupe des automorphismes polynomiaux deC2 5groupe des automorphismes affines 5groupe des automorphismes élémentaires 5groupe des automorphismes affines triangulaires 5groupe de CREMONA 8groupe de PICARD 18groupe de WEYL 44isomorphisme entre cubiques marquées 49isomorphisme entre éclatements marqués 49isomorphisme entre paires marquées 51localement holomorphiquement triviale 23linéairement équivalents 18matrice caractéristique 22modification propre 17monôme résonant 25multiplicativement indépendants 25nombre de SALEM 29paire marquée 51points éclatés 8point propre 22polynôme de Salem 29racine 46racine simple 46racine positive 46rang du domaine de rotation 39résolution ordonnée 22résonance 25simultanément diophantiens 25surface K3 23surface de COBLE 27surface de ENRIQUES 24surface minimale 24surface de HIRZEBRUCH 19transformation élémentaire 20transformation rationnelle 7

INDEX 89
transformation birationnelle 7transformation de CREMONA 8transformée stricte 18transformée totale 18variété kählérienne 15vecteur positif 46valeur propre dominante 48vecteur propre dominant 48

Bibliographie
[Bea78] A. Beauville.Surfaces algébriques complexes. Société Mathématique de France, Paris, 1978.Avec une sommaire en anglais, Astérisque, No. 54.
[BHPVdV04] W. P. Barth, K. Hulek, C. A. M. Peters, and A. Van deVen.Compact complex surfaces, volume 4of Ergebnisse der Mathematik und ihrer Grenzgebiete. 3. Folge. A Series of Modern Surveys inMathematics. Springer-Verlag, Berlin, second edition, 2004.
[BKa] E. Bedford and K. Kim. Continuous families of rationalsurface automorphisms with positiveentropy,arxiv :0804.2078, 2008, to appear in Math. Ann.
[BKb] E. Bedford and K. Kim. Dynamics of rational surface automorphisms : rotations domains,arxiv : 0907.3339, 2009.
[BK06] E. Bedford and K. Kim. Periodicities in linear fractional recurrences : degree growth of birationalsurface maps.Michigan Math. J., 54(3) :647–670, 2006.
[BK09] E. Bedford and K. Kim. Dynamics of rational surface automorphisms : linear fractional recur-rences.J. Geom. Anal., 19(3) :553–583, 2009.
[Bou81] N. Bourbaki.Éléments de mathématique. Masson, Paris, 1981. Groupes et algèbres de Lie. Cha-pitres 4, 5 et 6.
[BR04] G. Bastien and M. Rogalski. Global behavior of the solutions of Lyness’ difference equationun+2un = un+1 +a. J. Difference Equ. Appl., 10(11) :977–1003, 2004.
[BS91] E. Bedford and J. Smillie. Polynomial diffeomorphisms of C2. II. Stable manifolds and recur-rence.J. Amer. Math. Soc., 4(4) :657–679, 1991.
[Can] S. Cantat. Sur les groupes de transformations birationnelles des surfaces.To appear in Ann. ofMath.
[Can99] S. Cantat. Dynamique des automorphismes des surfaces projectives complexes.C. R. Acad. Sci.Paris Sér. I Math., 328(10) :901–906, 1999.
[Can01] S. Cantat. Dynamique des automorphismes des surfacesK3. Acta Math., 187(1) :1–57, 2001.
[Cas01] G. Castelnuovo. Le trasformationi generatrici delgruppo cremoniano nel piano.Atti della R.Accad. delle Scienze di Torino, 36 :861–874, 1901.
[CD] D. Cerveau and J. Déserti.Transformations birationnelles de petit degré,arXiv : 0811.2325,2008.
[Cob61] A. B. Coble.Algebraic geometry and theta functions. Revised printing. American Mathemati-cal Society Colloquium Publication, vol. X. American Mathematical Society, Providence, R.I.,1961.
[Dés08] J. Déserti. Expériences sur certaines transformations birationnelles quadratiques.Nonlinearity,21(6) :1367–1383, 2008.
91
92 BIBLIOGRAPHIE
[DF01] J. Diller and C. Favre. Dynamics of bimeromorphic maps of surfaces.Amer. J. Math.,123(6) :1135–1169, 2001.
[DG10] J. Déserti and J. Grivaux. Special automorphisms of rational surfaces with positive topologicalentropy,arxiv :1004.0656. 2010.
[Dil] J. Diller. Cremona transformations, surface automorphisms and the group law, arXiv :
0811.3038, 2008.
[Dil96] J. Diller. Dynamics of birational maps ofP2. Indiana Univ. Math. J., 45(3) :721–772, 1996.
[DJS07] J. Diller, D. Jackson, and A. Sommese. Invariant curves for birational surface maps.Trans. Amer.Math. Soc., 359(6) :2793–2991 (electronic), 2007.
[DO88] I. Dolgachev and D. Ortland. Point sets in projectivespaces and theta functions.Astérisque,(165) :210 pp. (1989), 1988.
[Dol08] I. V. Dolgachev. Reflection groups in algebraic geometry.Bull. Amer. Math. Soc. (N.S.), 45(1) :1–60 (electronic), 2008.
[DS04] T.-C. Dinh and N. Sibony. Regularization of currentsand entropy.Ann. Sci. École Norm. Sup.(4), 37(6) :959–971, 2004.
[DV36] P. Du Val. On the Kantor group of a set of points in a plane.Proc. London Math. Soc., 42 :18–51,1936.
[DZ01] I. V. Dolgachev and D.-Q. Zhang. Coble rational surfaces.Amer. J. Math., 123(1) :79–114, 2001.
[Fis76] G. Fischer.Complex analytic geometry. Lecture Notes in Mathematics, Vol. 538. Springer-Verlag, Berlin, 1976.
[FM89] S. Friedland and J. Milnor. Dynamical properties of plane polynomial automorphisms.ErgodicTheory Dynam. Systems, 9(1) :67–99, 1989.
[Giz80] M. H. Gizatullin. RationalG-surfaces.Izv. Akad. Nauk SSSR Ser. Mat., 44(1) :110–144, 239,1980.
[Gro87] M. Gromov. Entropy, homology and semialgebraic geometry. Astérisque, (145-146) :5, 225–240, 1987. Séminaire Bourbaki, Vol. 1985/86.
[Gro03] M. Gromov. On the entropy of holomorphic maps.Enseign. Math. (2), 49(3-4) :217–235, 2003.
[Har85] B. Harbourne. Blowings-up ofP2 and their blowings-down.Duke Math. J., 52(1) :129–148,1985.
[Har87] B. Harbourne. Rational surfaces with infinite automorphism group and no antipluricanonicalcurve.Proc. Amer. Math. Soc., 99(3) :409–414, 1987.
[Har88] B. Harbourne. Iterated blow-ups and moduli for rational surfaces. InAlgebraic geometry (Sun-dance, UT, 1986), volume 1311 ofLecture Notes in Math., pages 101–117. Springer, Berlin,1988.
[Her87] M.-R. Herman. Recent results and some open questions on Siegel’s linearization theorem ofgerms of complex analytic diffeomorphisms ofCn near a fixed point. InVIIIth internationalcongress on mathematical physics (Marseille, 1986), pages 138–184. World Sci. Publishing,Singapore, 1987.
[Hir88] A. Hirschowitz. Symétries des surfaces rationnelles génériques.Math. Ann., 281(2) :255–261,1988.
BIBLIOGRAPHIE 93
[HM98] J. Harris and I. Morrison.Moduli of curves, volume 187 ofGraduate Texts in Mathematics.Springer-Verlag, New York, 1998.
[Hum90] J. E. Humphreys.Reflection groups and Coxeter groups, volume 29 ofCambridge Studies inAdvanced Mathematics. Cambridge University Press, Cambridge, 1990.
[HV00a] J. Hietarinta and C. Viallet. Discrete Painlevé I and singularity confinement in projective space.Chaos Solitons Fractals, 11(1-3) :29–32, 2000. Integrability and chaos in discretesystems (Brus-sels, 1997).
[HV00b] J. Hietarinta and C. Viallet. Singularity confinement and degree growth. InSIDE III—symmetriesand integrability of difference equations (Sabaudia, 1998), volume 25 ofCRM Proc. LectureNotes, pages 209–216. Amer. Math. Soc., Providence, RI, 2000.
[Isk85] V. A. Iskovskikh. Proof of a theorem on relations in the two-dimensional Cremona group.Us-pekhi Mat. Nauk, 40(5(245)) :255–256, 1985.
[Jun42] H. W. E. Jung. Über ganze birationale Transformationen der Ebene.J. Reine Angew. Math.,184 :161–174, 1942.
[Kan95] S. Kantor.Theorie der endlichen Gruppen von eindeutigen Transformationen in der Ebene.1895.
[Koi88] M. Koitabashi. Automorphism groups of generic rational surfaces.J. Algebra, 116(1) :130–142,1988.
[Lam01] S. Lamy. L’alternative de Tits pour Aut[C2]. J. Algebra, 239(2) :413–437, 2001.
[Loo81] E. Looijenga. Rational surfaces with an anticanonical cycle.Ann. of Math. (2), 114(2) :267–322,1981.
[Man86] Y. I. Manin. Cubic forms, volume 4 ofNorth-Holland Mathematical Library. North-HollandPublishing Co., Amsterdam, second edition, 1986. Algebra,geometry, arithmetic, Translatedfrom the Russian by M. Hazewinkel.
[McM02] C. T. McMullen. Dynamics onK3 surfaces : Salem numbers and Siegel disks.J. Reine Angew.Math., 545 :201–233, 2002.
[McM07] C. T. McMullen. Dynamics on blowups of the projective plane.Publ. Math. Inst. Hautes ÉtudesSci., (105) :49–89, 2007.
[Nag60] M. Nagata. On rational surfaces. I. Irreducible curves of arithmetic genus 0 or 1.Mem. Coll. Sci.Univ. Kyoto Ser. A Math., 32 :351–370, 1960.
[Nag61] M. Nagata. On rational surfaces. II.Mem. Coll. Sci. Univ. Kyoto Ser. A Math., 33 :271–293,1960/1961.
[Nik87] V. V. Nikulin. Discrete reflection groups in Lobachevsky spaces and algebraic surfaces. InPro-ceedings of the International Congress of Mathematicians,Vol. 1, 2 (Berkeley, Calif., 1986),pages 654–671, Providence, RI, 1987. Amer. Math. Soc.
[Noe69] M. Noether. Ueber die auf Ebenen eindeutig abbildbaren algebraischen Flächen.Göttigen Na-chr., pages 1–6, 1869.
[Noe70] M. Noether. Ueber Flächen, welche Schaaren rationaler Curven besitzen.Math. Ann., 3(2) :161–227, 1870.
[Noe72] M. Noether. Zur Theorie der eindentigen Ebenentrasformationen.Math. Ann., 5(4) :635–639,1872.

94 BIBLIOGRAPHIE
[Ogu] K. Oguiso. The third smallest Salem number in automorphisms of K3 surfaces, arXiv :
0905.2396, 2009.
[PS81] R. Penrose and C. A. B. Smith. A quadratic mapping withinvariant cubic curve.Math. Proc.Cambridge Philos. Soc., 89(1) :89–105, 1981.
[Ser77] J.-P. Serre.Arbres, amalgames,SL2. Société Mathématique de France, Paris, 1977. Avec unsommaire anglais, Rédigé avec la collaboration de Hyman Bass, Astérisque, No. 46.
[Sil91] J. H. Silverman. Rational points onK3 surfaces : a new canonical height.Invent. Math.,105(2) :347–373, 1991.
[Tak01a] T. Takenawa. Algebraic entropy and the space of initial values for discrete dynamical systems.J. Phys. A, 34(48) :10533–10545, 2001. Symmetries and integrabilityof difference equations(Tokyo, 2000).
[Tak01b] T. Takenawa. Discrete dynamical systems associated with root systems of indefinite type.Comm.Math. Phys., 224(3) :657–681, 2001.
[Tak01c] T. Takenawa. A geometric approach to singularity confinement and algebraic entropy.J. Phys.A, 34(10) :L95–L102, 2001.
[Wan95] L. Wang. Rational points and canonical heights onK3-surfaces inP1×P1×P1. In Recent de-velopments in the inverse Galois problem (Seattle, WA, 1993), volume 186 ofContemp. Math.,pages 273–289. Amer. Math. Soc., Providence, RI, 1995.
[Wri92] D. Wright. Two-dimensional Cremona groups acting on simplicial complexes.Trans. Amer.Math. Soc., 331(1) :281–300, 1992.
[Yom87] Y. Yomdin. Volume growth and entropy.Israel J. Math., 57(3) :285–300, 1987.
[Zha01] D.-Q. Zhang. Automorphisms of finite order on rational surfaces.J. Algebra, 238(2) :560–589,2001. With an appendix by I. Dolgachev.







![Compression de données préservant les complexes …...la forme de modules pour la plate-forme open-source d’analyse topologique de données “Topology ToolKit” (TTK) [38] (intégrée](https://img.pdfslide.fr/doc/110x75/5f6eb26631d1ec2e33082b66/compression-de-donnes-prservant-les-complexes-la-forme-de-modules-pour-la.jpg)


![Méthode de Monte-Carlo & Application aux Processus …rpeyre/pro/enseignement/poly-MCPA.pdf · & Application aux Processus Aléatoires Rémi Peyre ... Un espace topologique[] Xest](https://img.pdfslide.fr/doc/110x75/5b96435709d3f27e758b67e6/methode-de-monte-carlo-application-aux-processus-rpeyreproenseignementpoly-mcpapdf.jpg)


















