Embed Size (px)
Citation preview
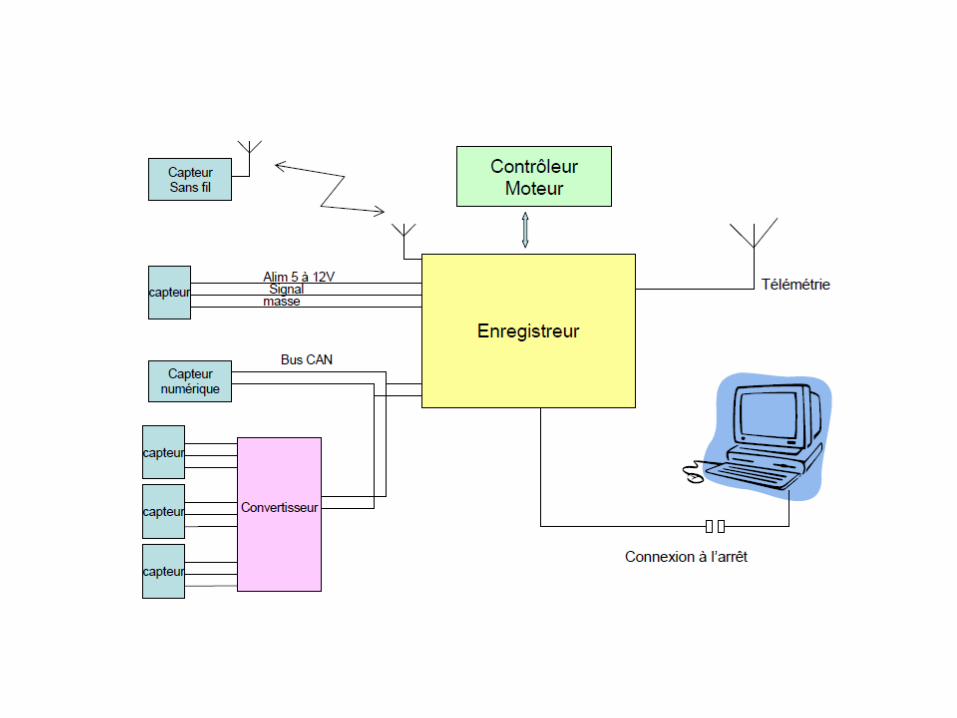
La Chaîne d’instrumentation : généralités
Une chaîne d’instrumentation est un dispositif qui contient
• Tous les éléments servant à mesurer des grandeurs physiques (capteur)
• Des fonctions de conditionnement, de filtrage, de stockage, d’affichage, d’analyse des données
• qui traite les mesures en vue d’effectuer
• de la surveillance (mesure quotidienne de la température), du diagnostic des tests• de la commande d’appareillage (mesure du taux de sucre dans le sang pour commander
une pompe à insuline.), on parlera alors de chaîne de régulation. • de la modélisation de phénomènes
La connaissance des phénomènes physiques et l’interprétation qu’en fait l’utilisateur sont primordiales.
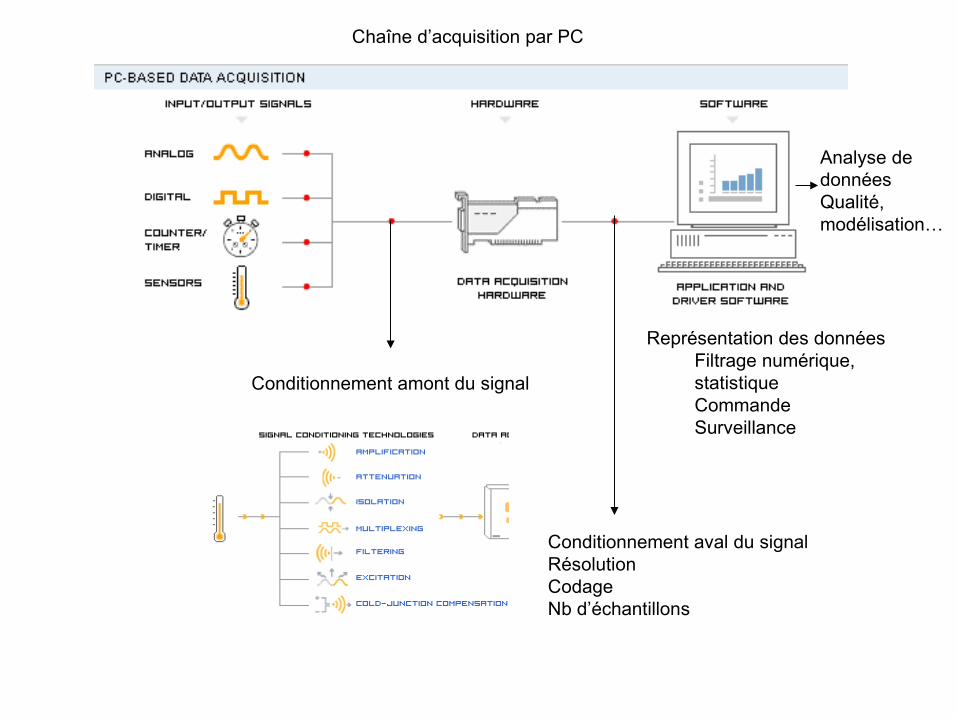
Chaîne d’acquisition par PC
Conditionnement amont du signal
Conditionnement aval du signalRésolutionCodageNb d’échantillons
Représentation des donnéesFiltrage numérique, statistiqueCommandeSurveillance
Analyse de donnéesQualité, modélisation…
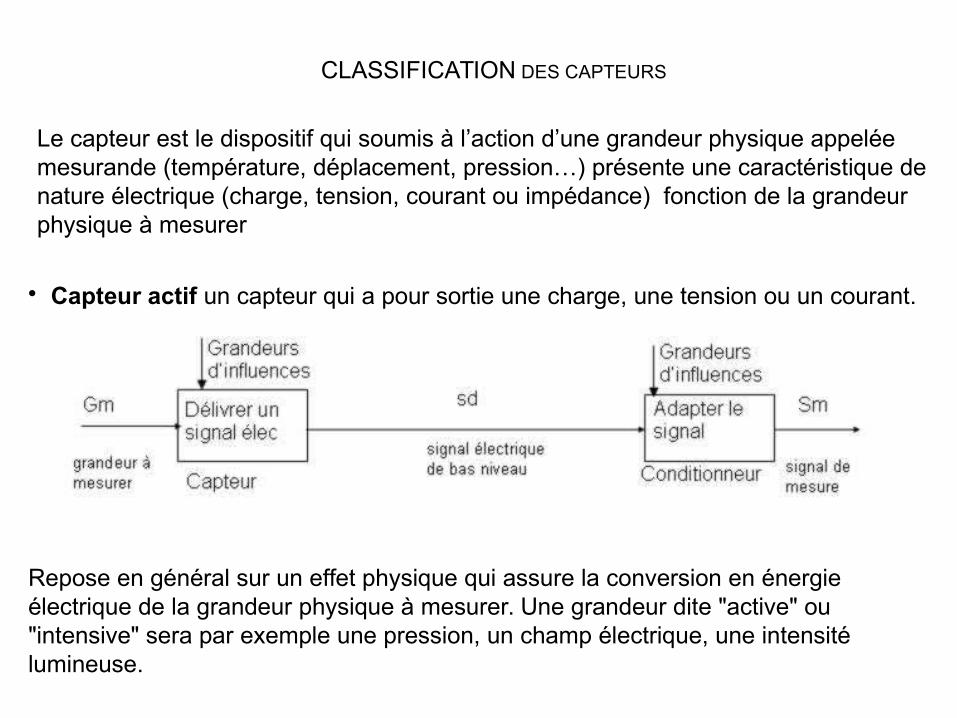
CLASSIFICATION DES CAPTEURS
Le capteur est le dispositif qui soumis à l’action d’une grandeur physique appelée mesurande (température, déplacement, pression…) présente une caractéristique de nature électrique (charge, tension, courant ou impédance) fonction de la grandeur physique à mesurer
• Capteur actif un capteur qui a pour sortie une charge, une tension ou un courant.
Repose en général sur un effet physique qui assure la conversion en énergie électrique de la grandeur physique à mesurer. Une grandeur dite "active" ou "intensive" sera par exemple une pression, un champ électrique, une intensité lumineuse.
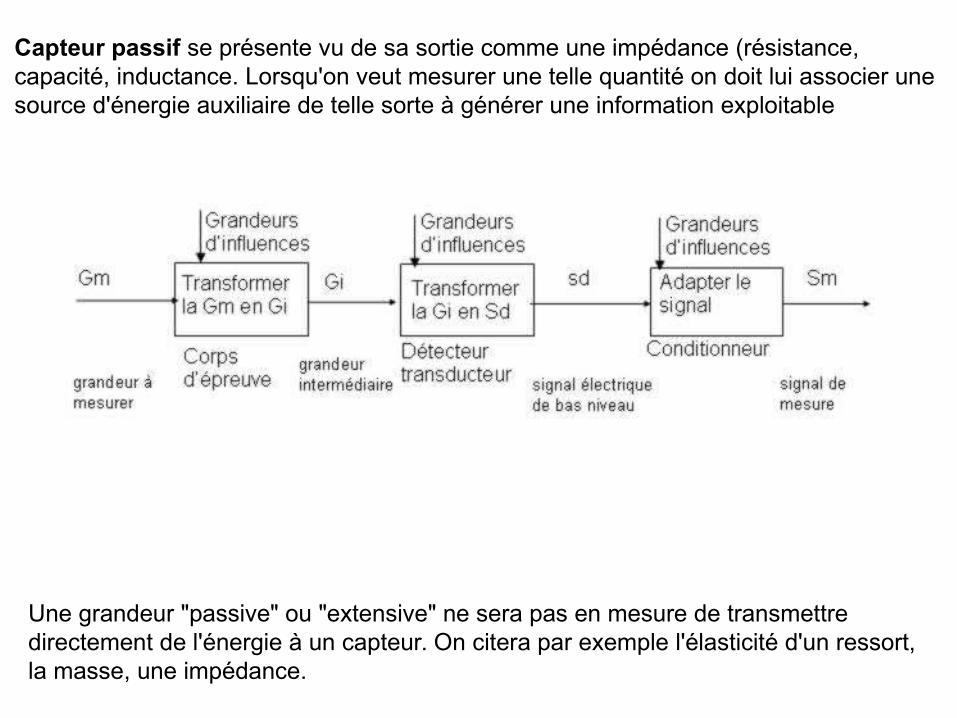
Capteur passif se présente vu de sa sortie comme une impédance (résistance, capacité, inductance. Lorsqu'on veut mesurer une telle quantité on doit lui associer une source d'énergie auxiliaire de telle sorte à générer une information exploitable
Une grandeur "passive" ou "extensive" ne sera pas en mesure de transmettre directement de l'énergie à un capteur. On citera par exemple l'élasticité d'un ressort, la masse, une impédance.
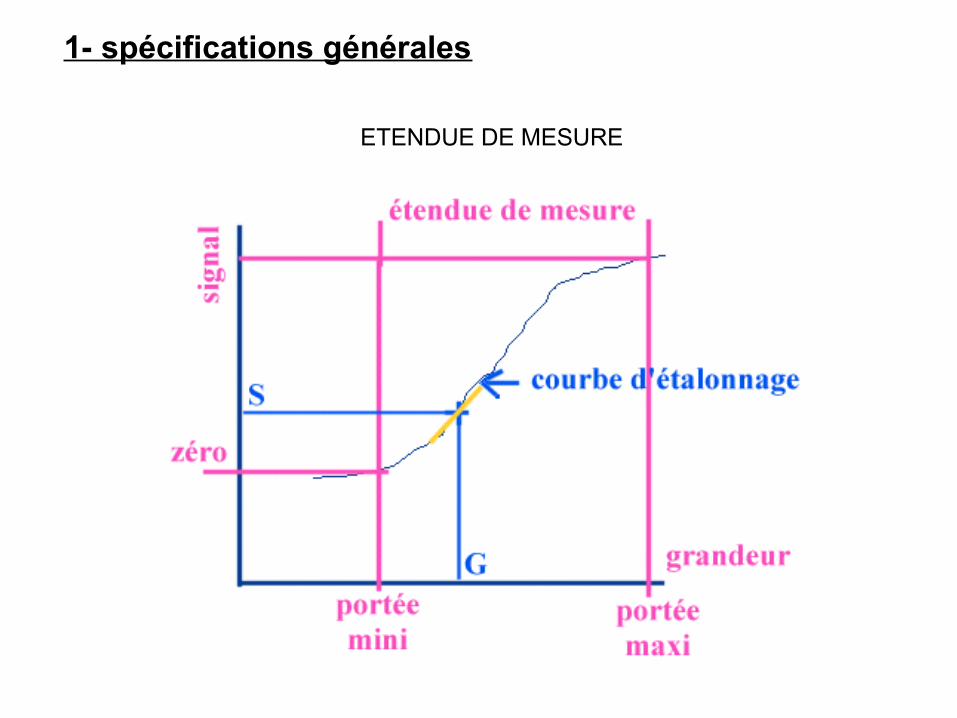
ETENDUE DE MESURE
1- spécifications générales
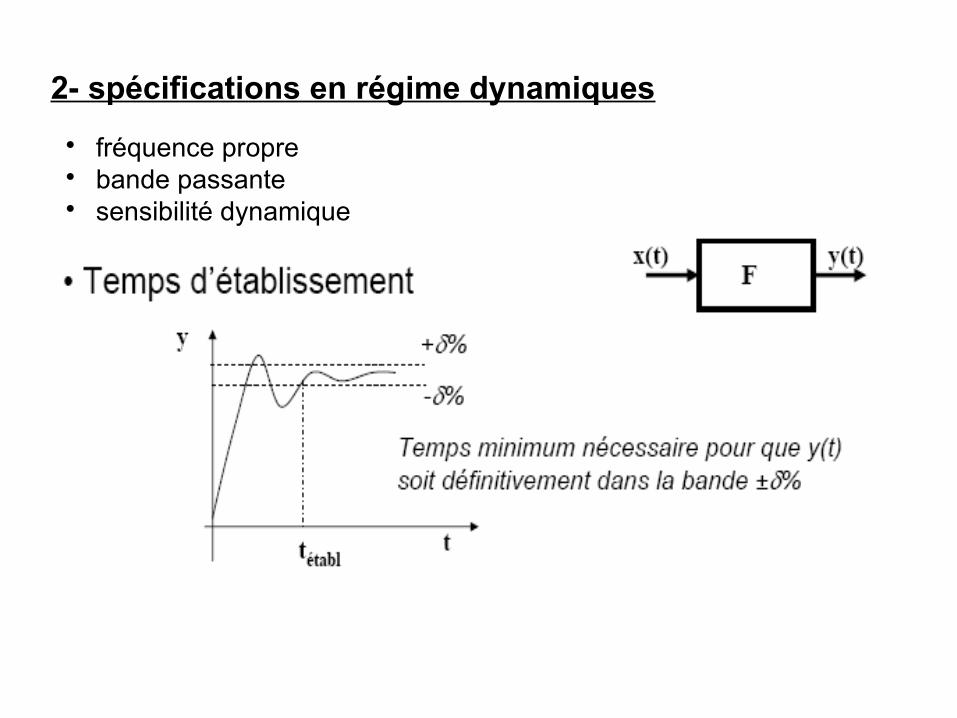
2- spécifications en régime dynamiques
• fréquence propre• bande passante• sensibilité dynamique
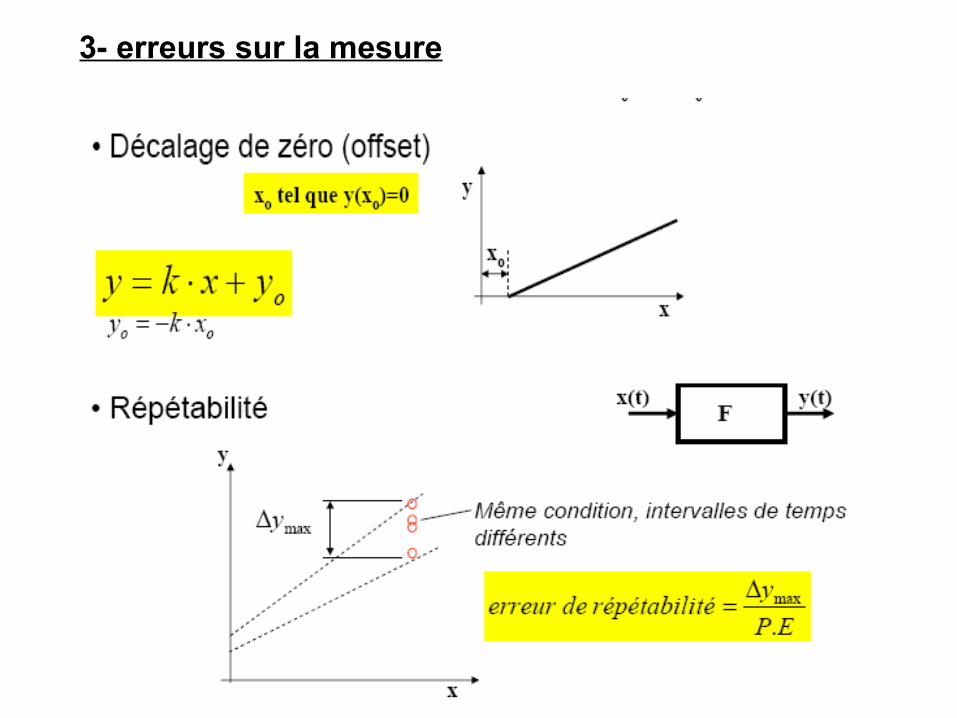
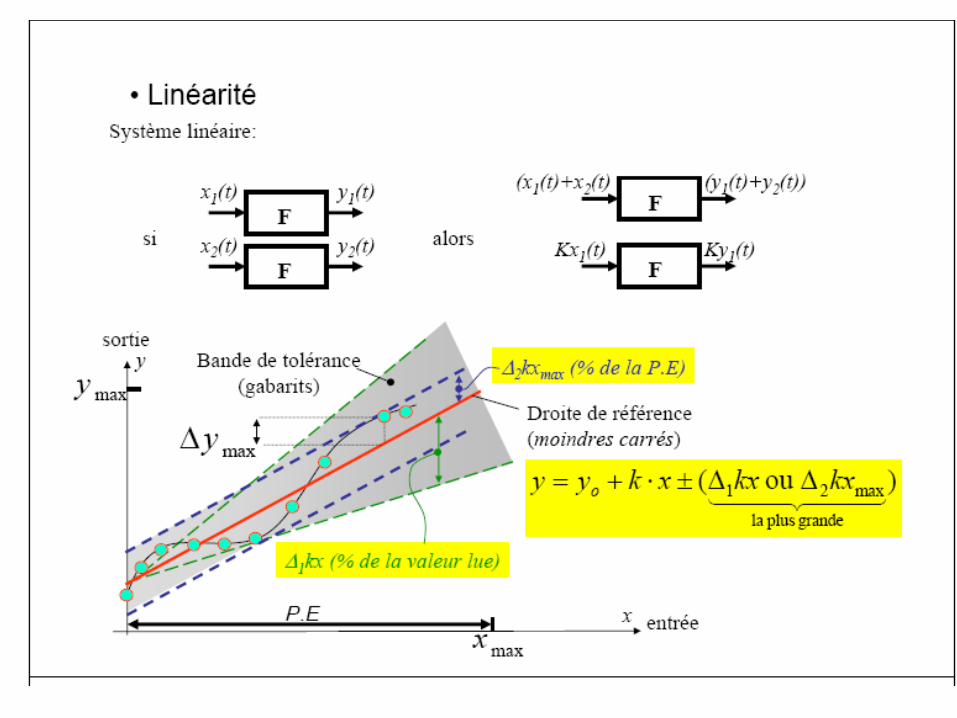
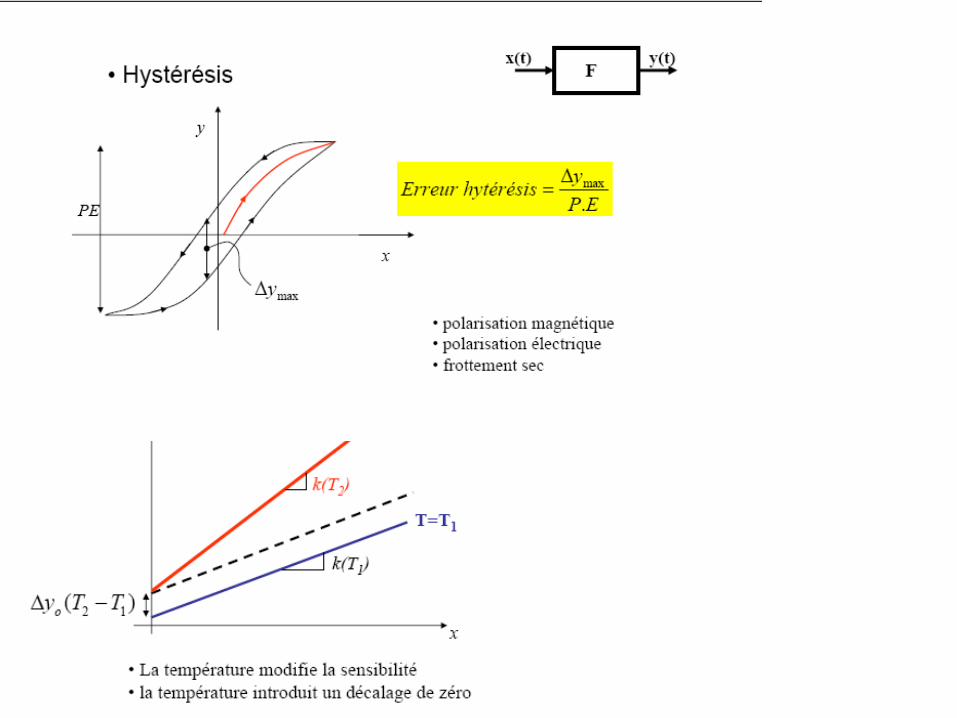
3- erreurs sur la mesure
- erreur due aux grandeurs d’influence
On appelle grandeurs d’influence les grandeurs physiques autres que la grandeur à mesurer et qui influent sur les caractéristiques métrologiques du capteur. Ce sont principalement la température, les vibrations, la pression statique, l’hygrométrie.
L‘effet des grandeurs d’influence n’est pas pris en compte dans l’erreur de précision mais doit s’y ajouter. Pour les réduire on choisira des composants peu sensibles et on protégera le système par un blindage adéquat, éventuellement en introduisant un doublement des capteurs pour éliminer par soustraction ces influences
- erreurs stochastiques
Ces erreurs résultent de processus fondamentaux se produisant dans les composants tels les bruits, l’échauffement du matériau, la pression dans un volume de gaz...
Pour les réduire on cherchera par exemple à réduire l'échauffement des composants, du à l’effet Joule, en tentant de réduire au mieux le courant ou en facilitant l’évacuation des calories par une ventilation adaptée.
- Derives
Le vieillissement du capteur ou des éléments associés entraîne une modification du signal de sortie en fonction du temps exprimé en heures, mois années selon le capteur
Etalonnage des capteurs:L’étalonnage permet d’expliciter la relation entre mesurande et grandeur électrique de sortie
Etalonnage direct: Les diverses valeurs du mesurande sont fournies par des étalons dont la valeur est connue avec une précision 100 fois supérieure à celle recherchée pour le capteurEtalonnage par comparaison: On utilise un capteur de référence dont on possède la courbe d’étalonnage et dont on est assuré de la stabilité
Organismes professionnels:Lors du choix de capteurs, de procédures d’essai ou d’étalonnage on peut s’adresser aux organismes suivants (liste non exhaustive)LNE laboratoire national d’essaisLCIE laboratoire central des industries électriquesSIMTEC syndicat d’instrumentation de mesure du test de l’énergie et de la CAOCETIM centre technique des industries mécaniques
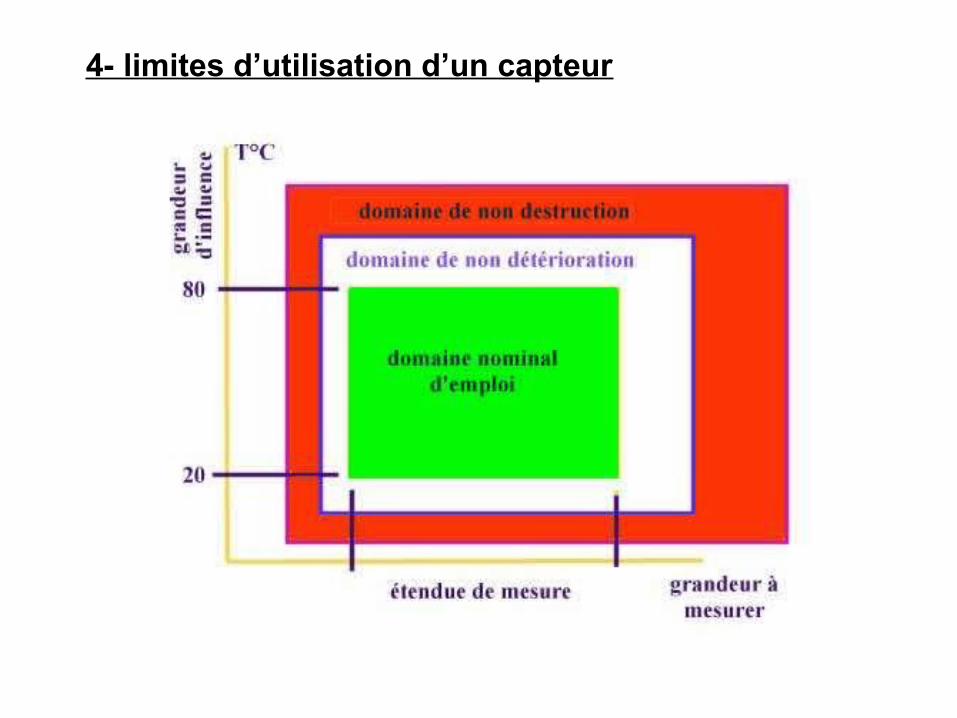
4- limites d’utilisation d’un capteur
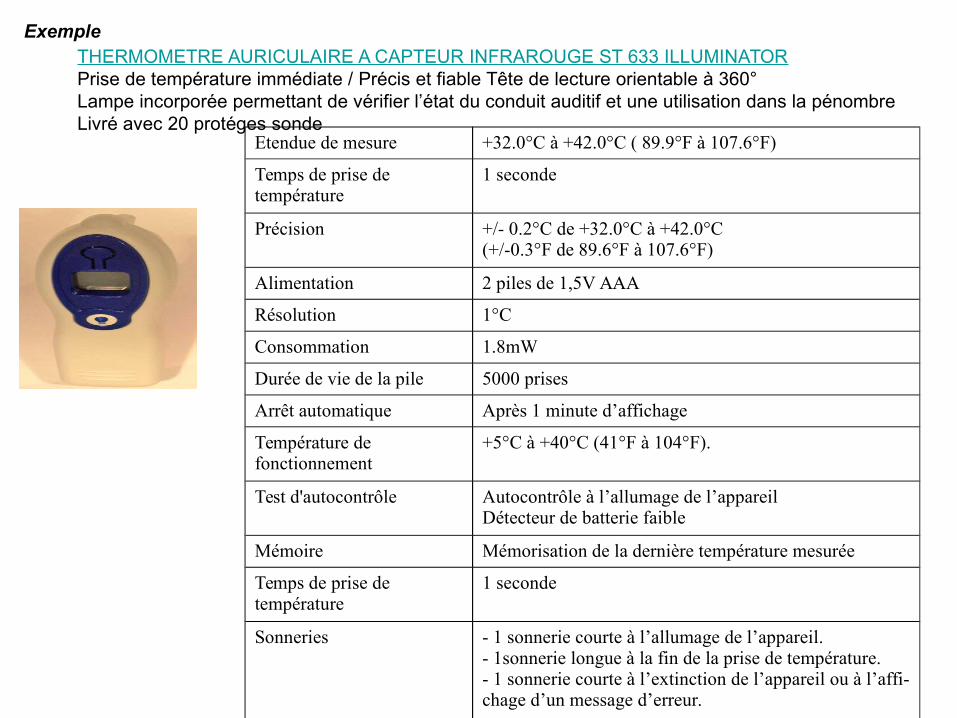
Exemple THERMOMETRE AURICULAIRE A CAPTEUR INFRAROUGE ST 633 ILLUMINATORPrise de température immédiate / Précis et fiable Tête de lecture orientable à 360° Lampe incorporée permettant de vérifier l’état du conduit auditif et une utilisation dans la pénombre Livré avec 20 protéges sonde
Etendue de mesure +32.0°C à +42.0°C ( 89.9°F à 107.6°F)
Temps de prise de température
1 seconde
Précision +/- 0.2°C de +32.0°C à +42.0°C (+/-0.3°F de 89.6°F à 107.6°F)
Alimentation 2 piles de 1,5V AAA
Résolution 1°C
Consommation 1.8mW
Durée de vie de la pile 5000 prises
Arrêt automatique Après 1 minute d’affichage
Température de fonctionnement
+5°C à +40°C (41°F à 104°F).
Test d'autocontrôle Autocontrôle à l’allumage de l’appareil Détecteur de batterie faible
Mémoire Mémorisation de la dernière température mesurée
Temps de prise de température
1 seconde
Sonneries - 1 sonnerie courte à l’allumage de l’appareil. - 1sonnerie longue à la fin de la prise de température. - 1 sonnerie courte à l’extinction de l’appareil ou à l’affi-chage d’un message d’erreur.
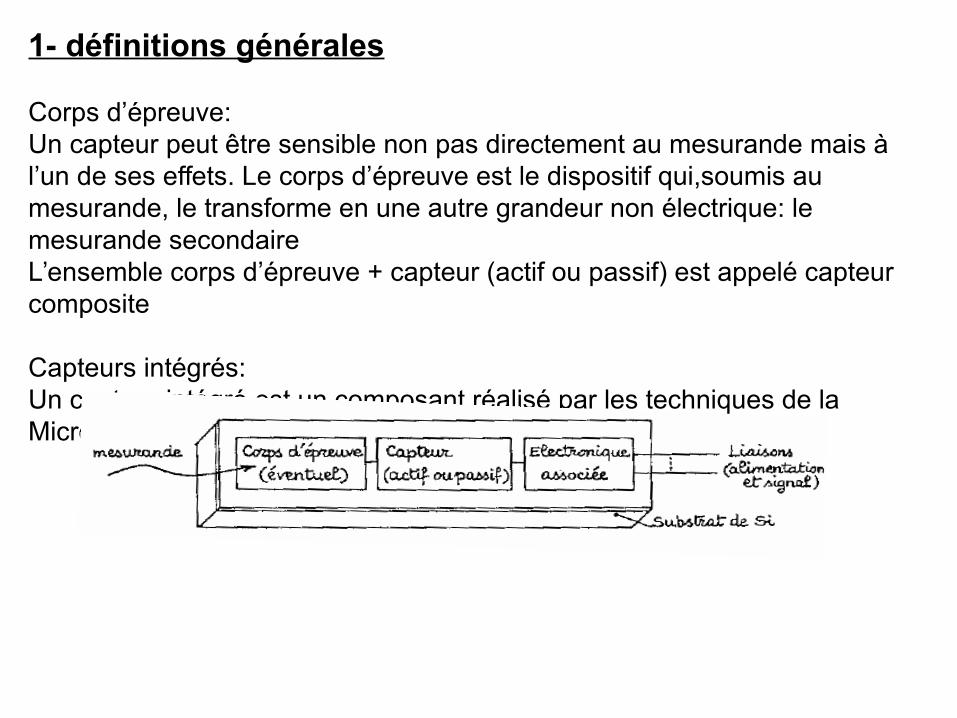
1- définitions générales
Corps d’épreuve:Un capteur peut être sensible non pas directement au mesurande mais à l’un de ses effets. Le corps d’épreuve est le dispositif qui,soumis au mesurande, le transforme en une autre grandeur non électrique: le mesurande secondaireL’ensemble corps d’épreuve + capteur (actif ou passif) est appelé capteur composite
Capteurs intégrés:Un capteur intégré est un composant réalisé par les techniques de la Microélectronique sur un substrat de silicium
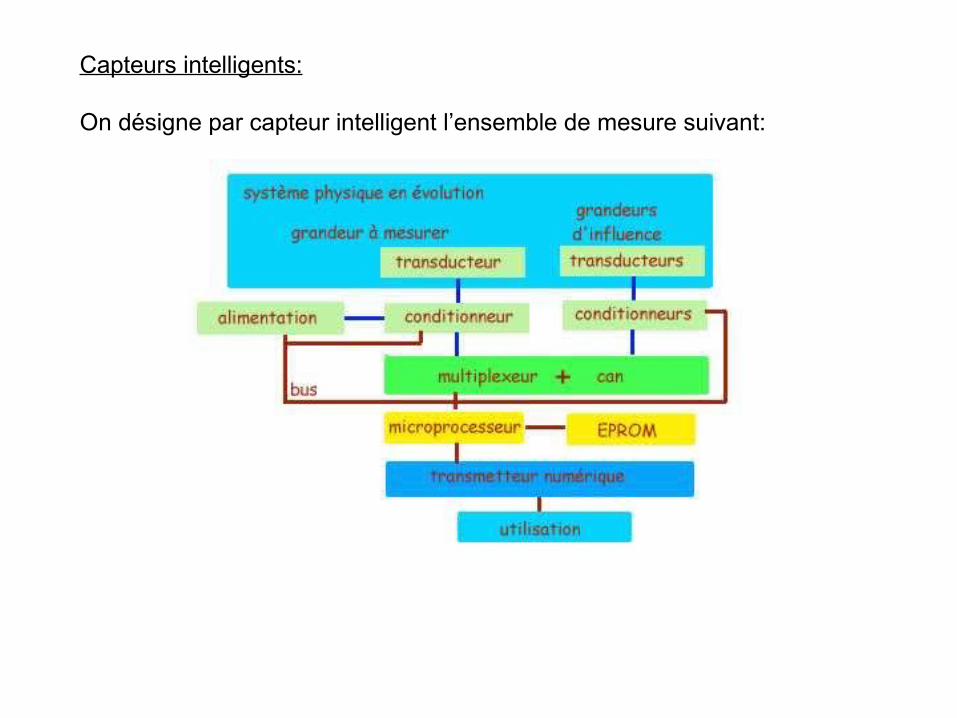
Capteurs intelligents:
On désigne par capteur intelligent l’ensemble de mesure suivant:
1- Deux méthodes fondamentales :
- Le capteur fournit un signal analogique fonction de la position de l ’une des parties mobiles. La majorité de ce type de capteurs a pour principe la variation de Z=f(m) sensible soit aux paramètres dimensionnels soit aux propriétés électriques (R, L, C ou mutuelle inductance) du matériau constitutif.
- Le capteur fournit une impulsion à chaque déplacement élémentaire de la catégorie des capteurs digitaux.
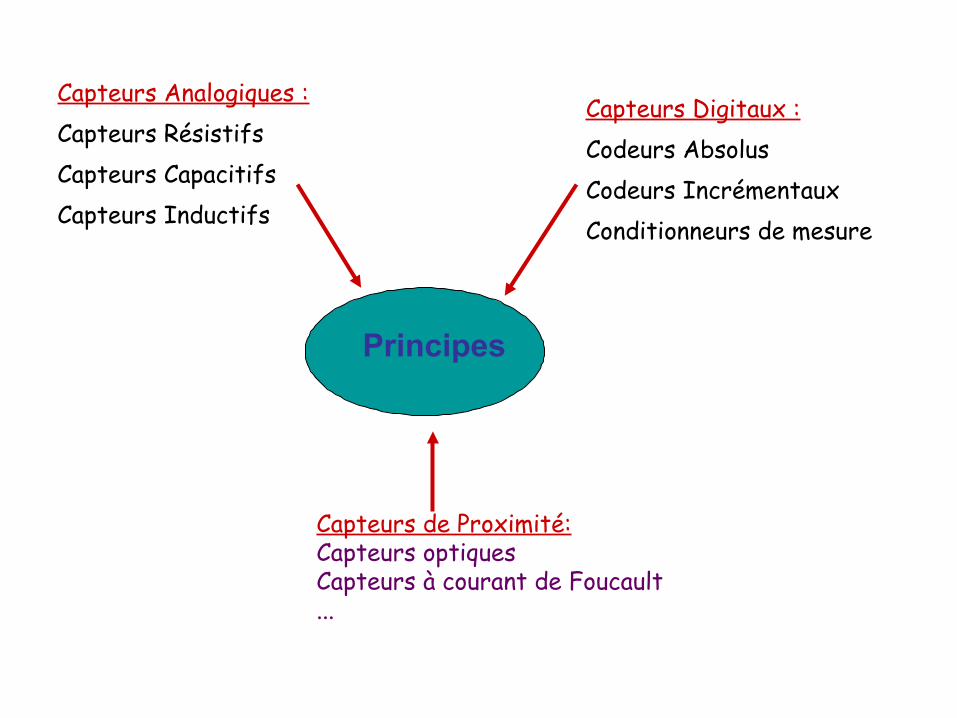
Capteurs Digitaux :Codeurs AbsolusCodeurs IncrémentauxConditionneurs de mesure
Principes
Capteurs Analogiques :Capteurs RésistifsCapteurs CapacitifsCapteurs Inductifs
Capteurs de Proximité:Capteurs optiquesCapteurs à courant de Foucault...
Capteurs analogiques de déplacement
Diapositive 25/30
L
l
0
R(n)
R(l)
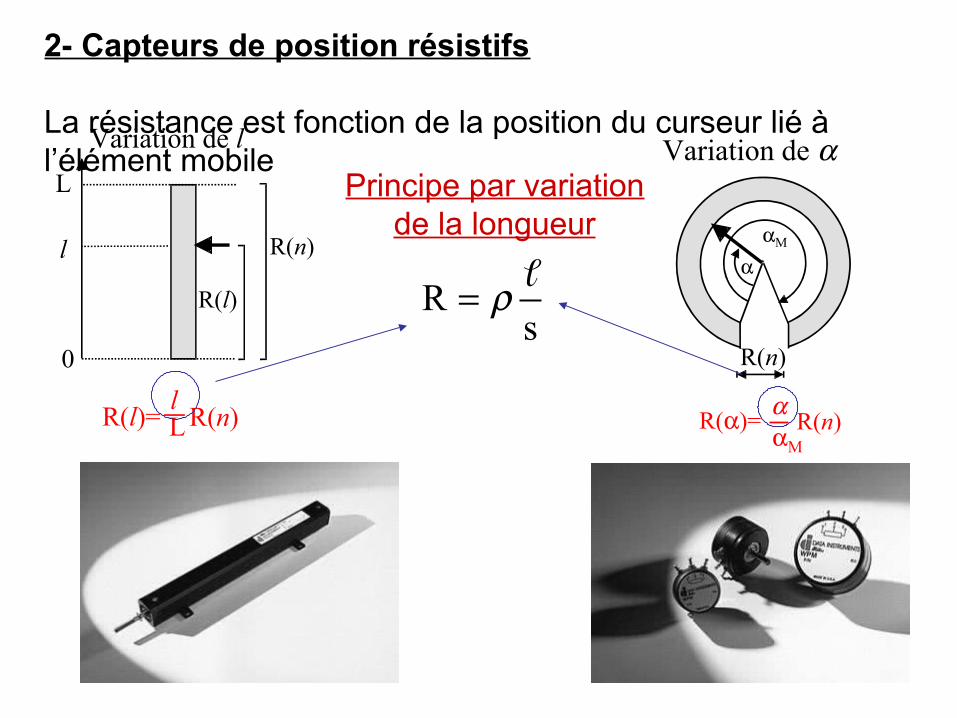
R(l)=lL R(n)
Variation de l Variation de
M
R(n)
R()=
R(n)M
sR
Principe par variation de la longueur
2- Capteurs de position résistifs
La résistance est fonction de la position du curseur lié à l’élément mobile
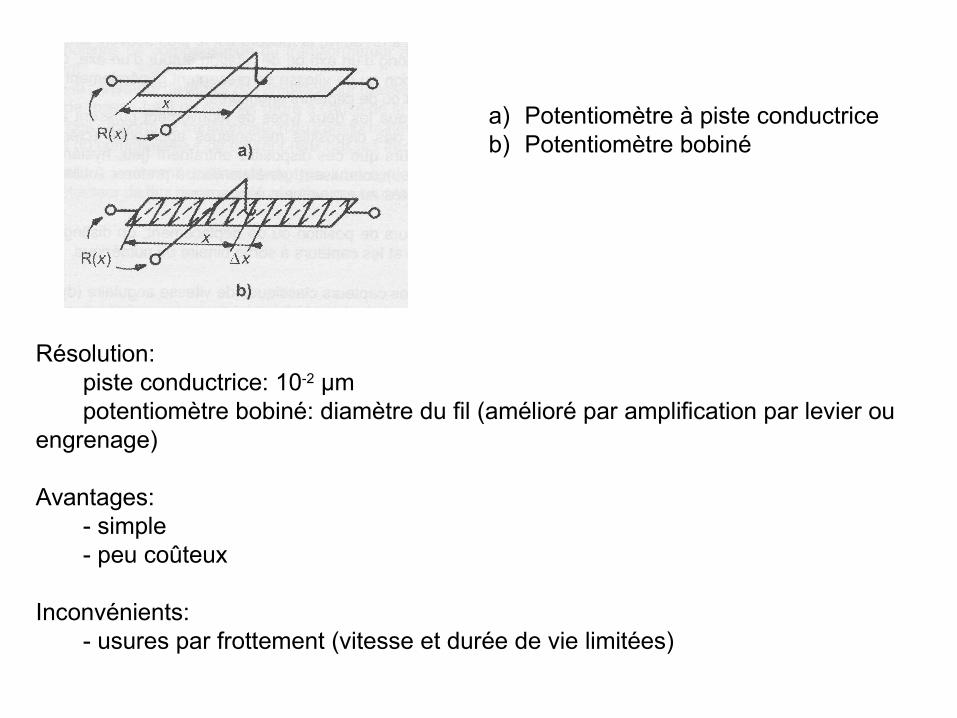
a) Potentiomètre à piste conductriceb) Potentiomètre bobiné
Résolution:piste conductrice: 10-2 µmpotentiomètre bobiné: diamètre du fil (amélioré par amplification par levier ou
engrenage)
Avantages:- simple- peu coûteux
Inconvénients:- usures par frottement (vitesse et durée de vie limitées)
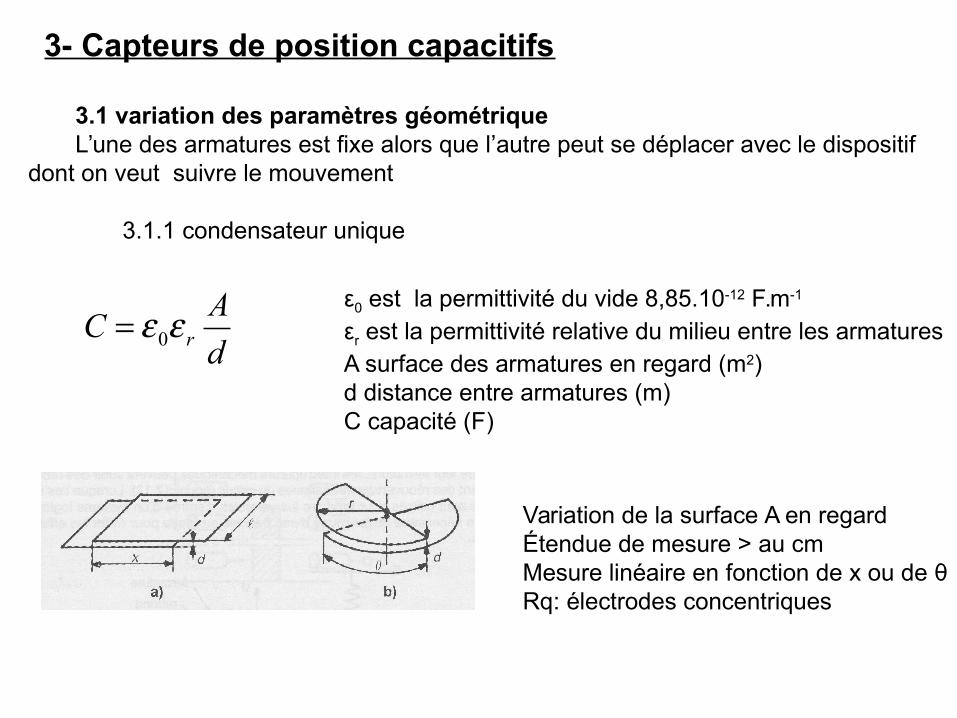
3.1 variation des paramètres géométriqueL’une des armatures est fixe alors que l’autre peut se déplacer avec le dispositif
dont on veut suivre le mouvement
3.1.1 condensateur unique
3- Capteurs de position capacitifs
Variation de la surface A en regardÉtendue de mesure > au cmMesure linéaire en fonction de x ou de θRq: électrodes concentriques
d
AC r 0
ε0 est la permittivité du vide 8,85.10-12 F.m-1
εr est la permittivité relative du milieu entre les armaturesA surface des armatures en regard (m2)d distance entre armatures (m)C capacité (F)
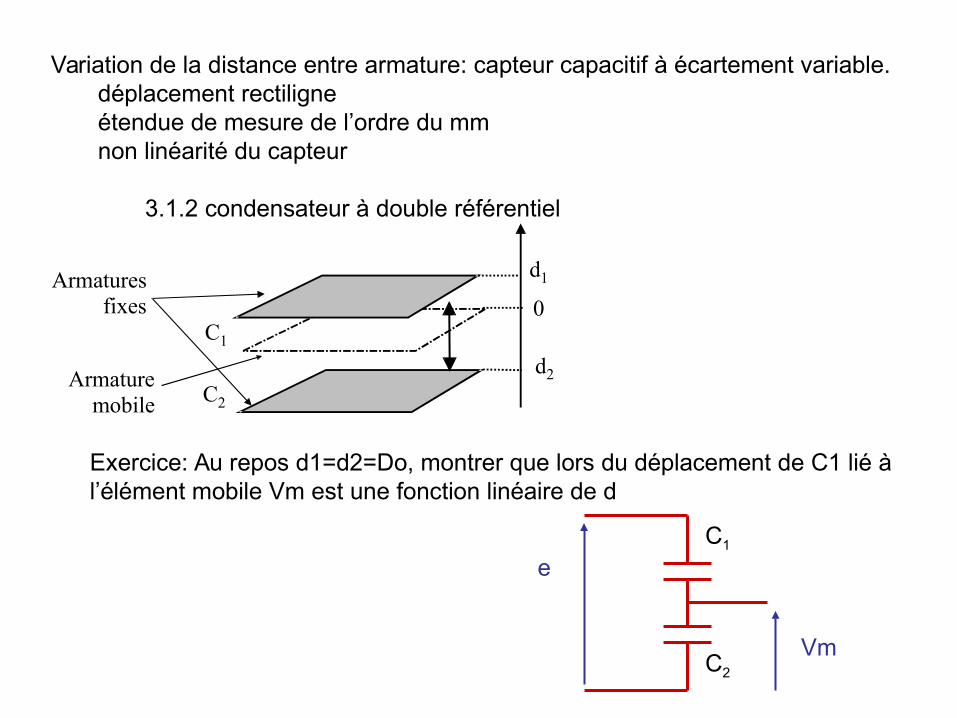
Variation de la distance entre armature: capteur capacitif à écartement variable. déplacement rectiligneétendue de mesure de l’ordre du mmnon linéarité du capteur
3.1.2 condensateur à double référentiel
Armaturesfixes
Armaturemobile
0
d1
d2
C1
C2
Exercice: Au repos d1=d2=Do, montrer que lors du déplacement de C1 lié à l’élément mobile Vm est une fonction linéaire de d
C1
C2
e
Vm

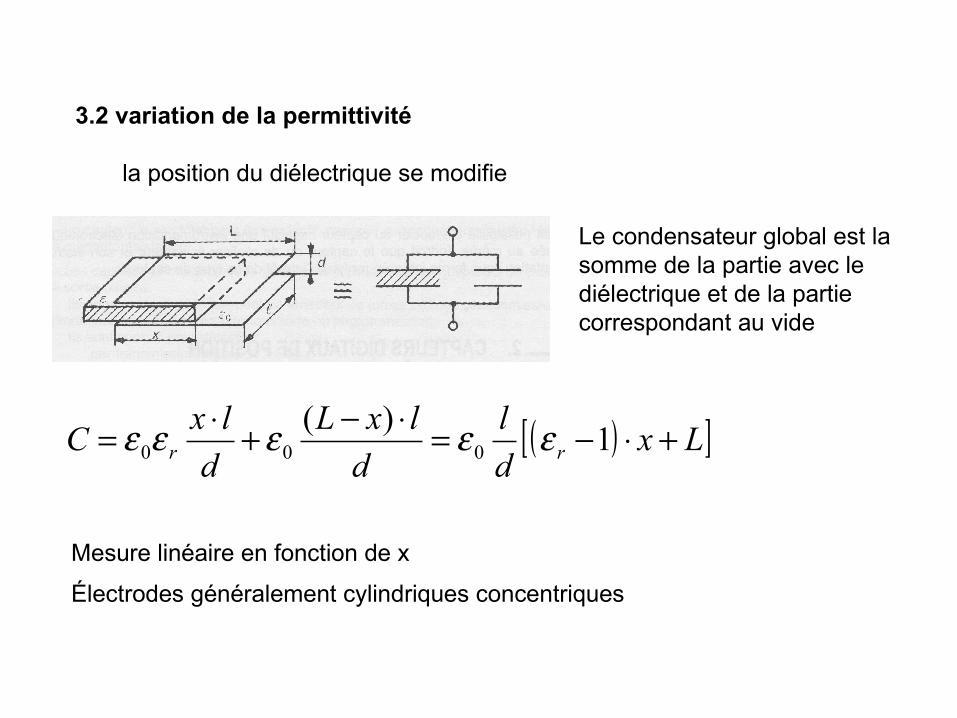
3.2 variation de la permittivité
la position du diélectrique se modifie
Mesure linéaire en fonction de x
Électrodes généralement cylindriques concentriques
Le condensateur global est la somme de la partie avec le diélectrique et de la partie correspondant au vide
Lxd
l
d
lxL
d
lxC rr 1
)(000
Capteur de niveau capacitifLiquides isolants ε>1Endress+HauserMFTI 51
Avantages des capteurs capacitifs:- simples, robustes, fiables- insensibles aux parasites électromagnétiques- pratiquement insensibles à la température
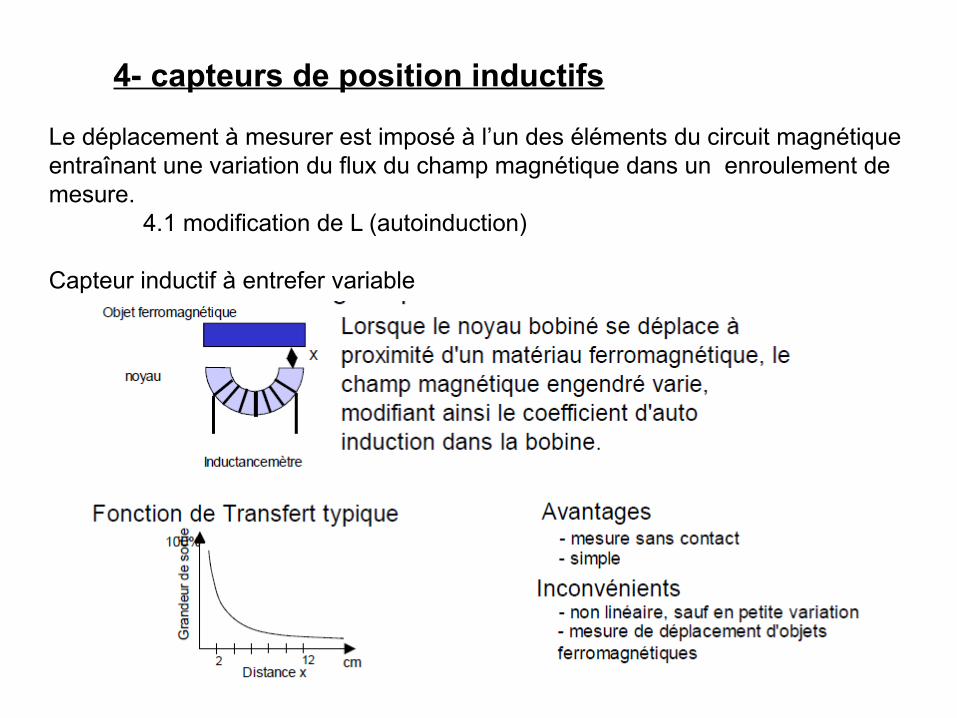
4- capteurs de position inductifs
Le déplacement à mesurer est imposé à l’un des éléments du circuit magnétique entraînant une variation du flux du champ magnétique dans un enroulement de mesure.
4.1 modification de L (autoinduction)
Capteur inductif à entrefer variable
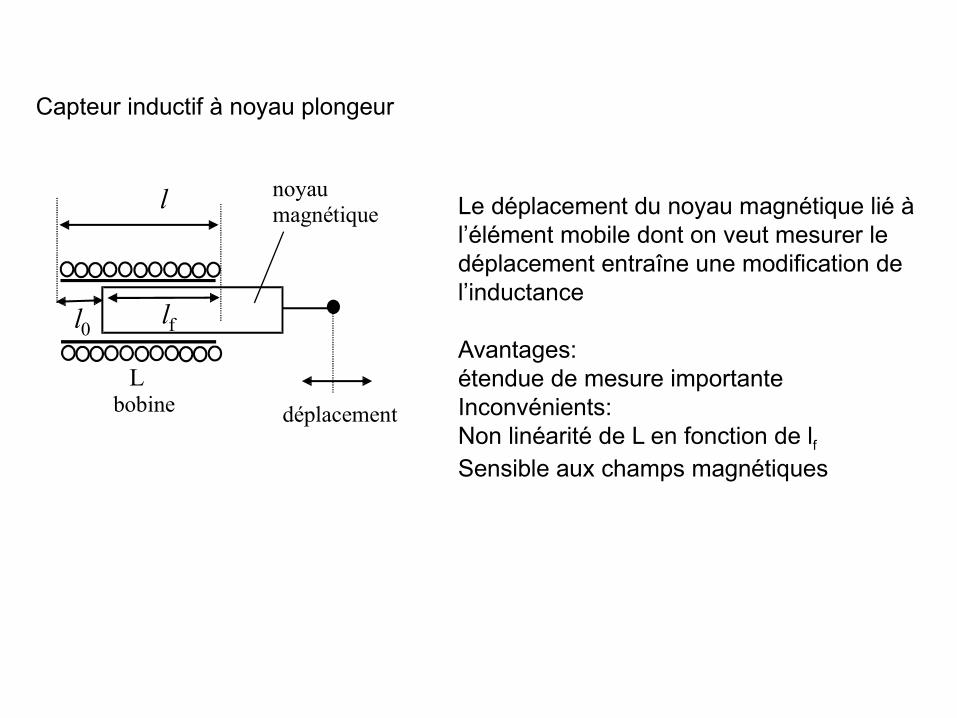
Capteur inductif à noyau plongeur
noyau magnétique
l
l0 lf
déplacementbobineL
Le déplacement du noyau magnétique lié à l’élément mobile dont on veut mesurer le déplacement entraîne une modification de l’inductance
Avantages: étendue de mesure importanteInconvénients:Non linéarité de L en fonction de lfSensible aux champs magnétiques
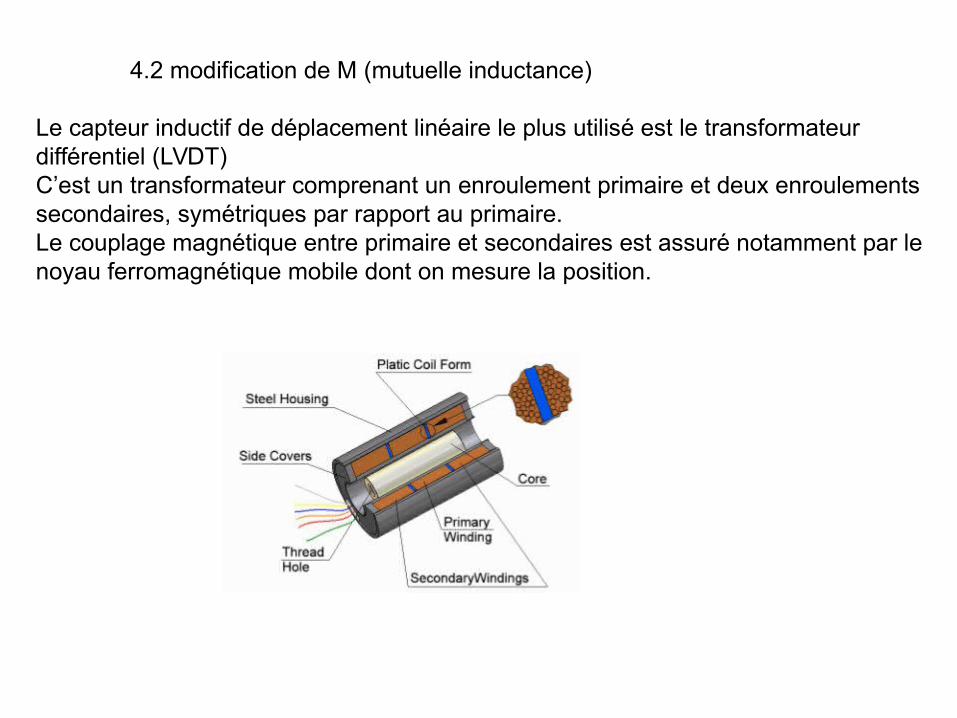
4.2 modification de M (mutuelle inductance)
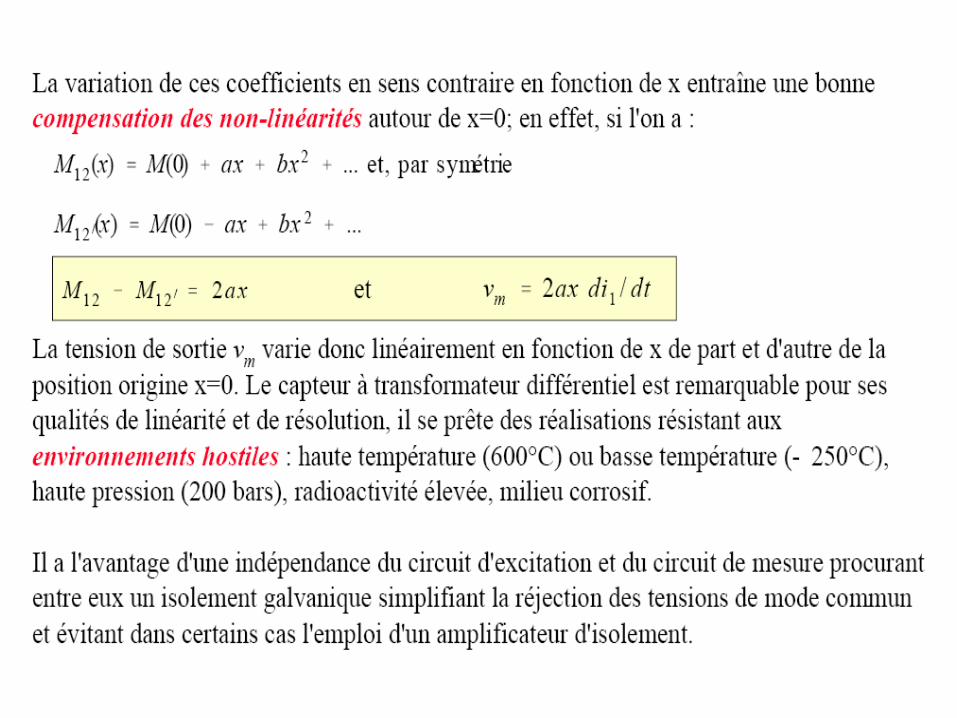
Le capteur inductif de déplacement linéaire le plus utilisé est le transformateur différentiel (LVDT)C’est un transformateur comprenant un enroulement primaire et deux enroulements secondaires, symétriques par rapport au primaire.Le couplage magnétique entre primaire et secondaires est assuré notamment par le noyau ferromagnétique mobile dont on mesure la position.
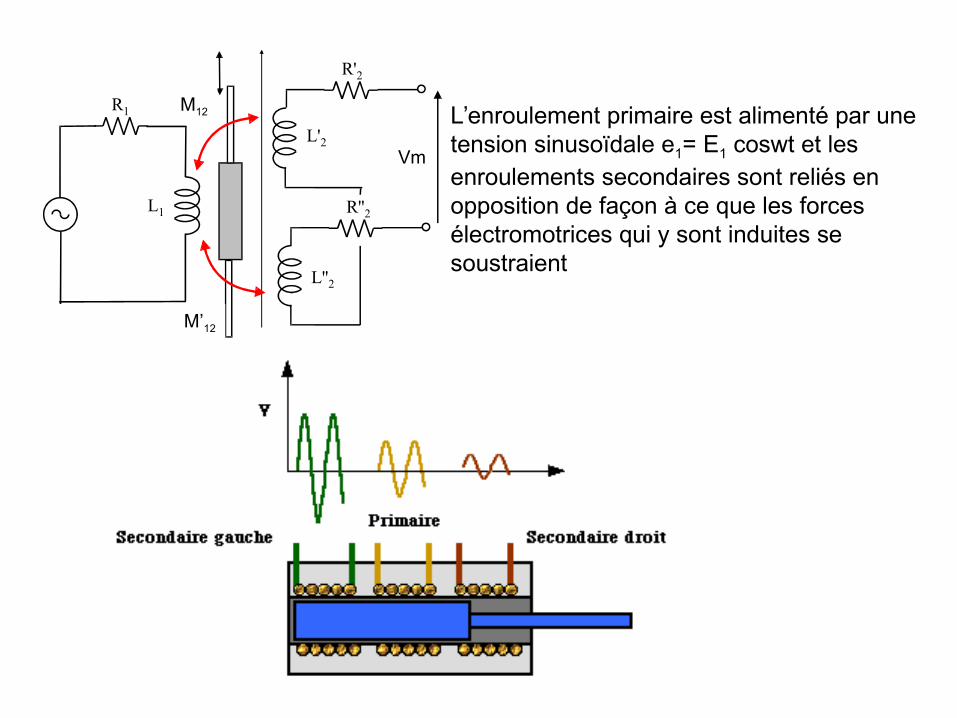
L’enroulement primaire est alimenté par une tension sinusoïdale e1= E1 coswt et les enroulements secondaires sont reliés en opposition de façon à ce que les forces électromotrices qui y sont induites se soustraient
R1
R'2
R''2
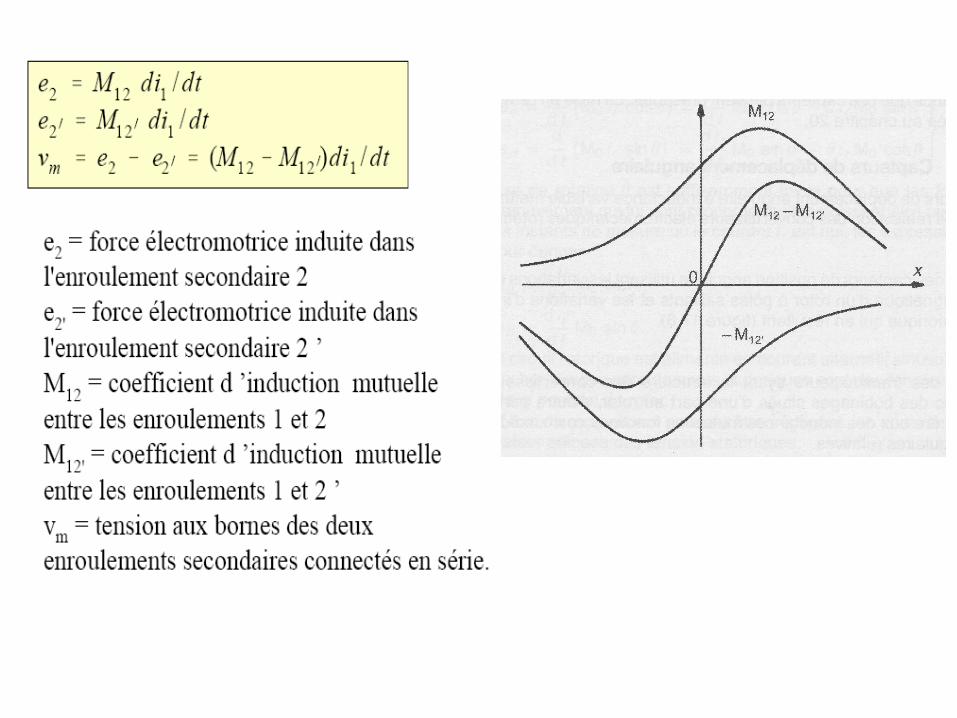
Vs
L'2
L''2
L1
M'(x)
M''(x)
M12
M’12
Vm

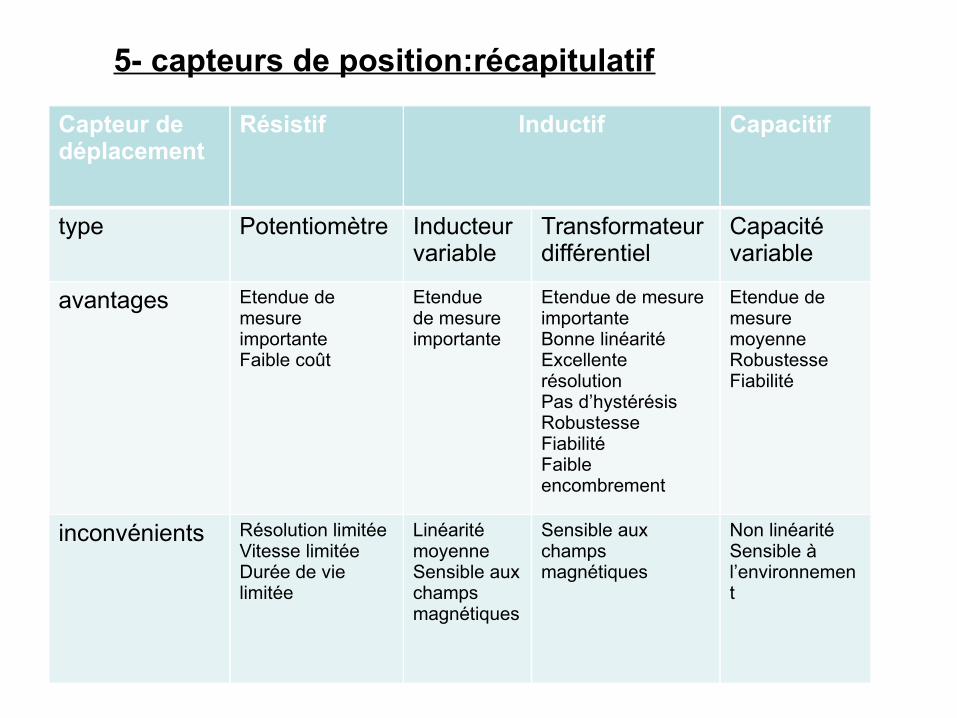
5- capteurs de position:récapitulatif
Capteur de déplacement
Résistif Inductif Capacitif
type Potentiomètre Inducteurvariable
Transformateur différentiel
Capacité variable
avantages Etendue de mesure importanteFaible coût
Etendue de mesure importante
Etendue de mesure importanteBonne linéaritéExcellente résolutionPas d’hystérésisRobustesseFiabilitéFaible encombrement
Etendue de mesure moyenneRobustesseFiabilité
inconvénients Résolution limitéeVitesse limitéeDurée de vie limitée
Linéarité moyenneSensible aux champs magnétiques
Sensible aux champs magnétiques
Non linéaritéSensible à l’environnement
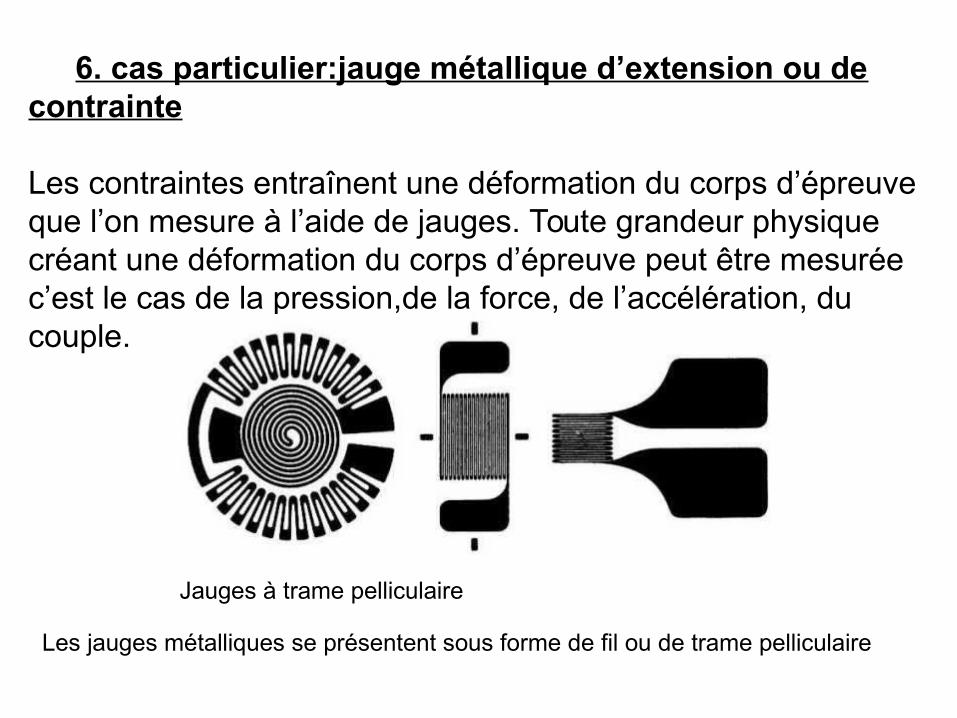
6. cas particulier:jauge métallique d’extension ou de contrainte
Les contraintes entraînent une déformation du corps d’épreuve que l’on mesure à l’aide de jauges. Toute grandeur physique créant une déformation du corps d’épreuve peut être mesurée c’est le cas de la pression,de la force, de l’accélération, du couple.
Jauges à trame pelliculaire
Les jauges métalliques se présentent sous forme de fil ou de trame pelliculaire
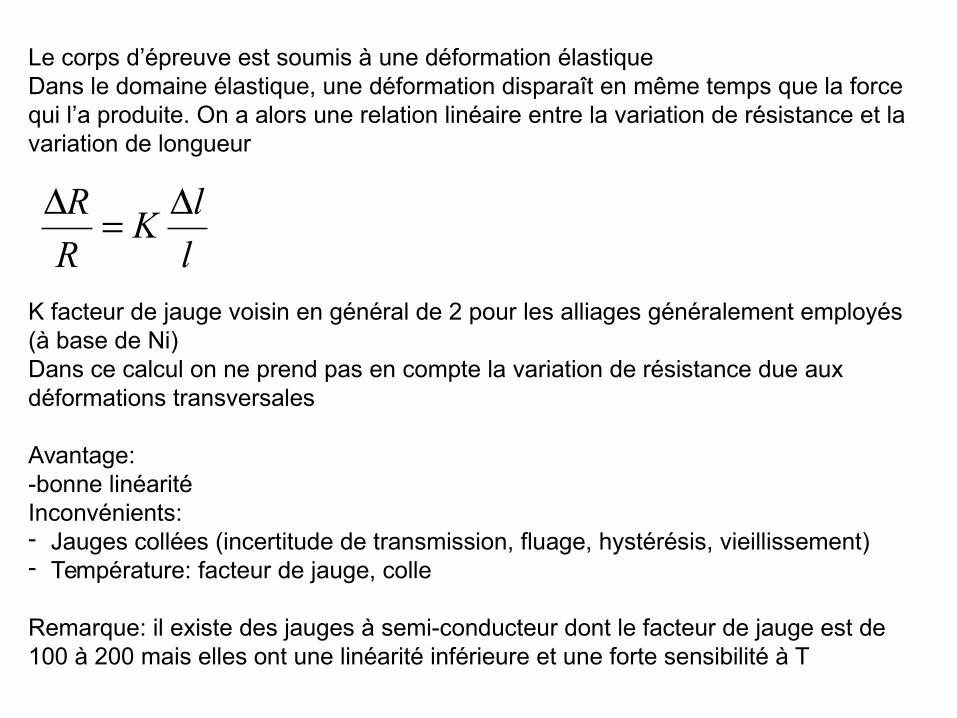
Le corps d’épreuve est soumis à une déformation élastiqueDans le domaine élastique, une déformation disparaît en même temps que la force qui l’a produite. On a alors une relation linéaire entre la variation de résistance et la variation de longueur
l
lK
R
R
K facteur de jauge voisin en général de 2 pour les alliages généralement employés (à base de Ni)Dans ce calcul on ne prend pas en compte la variation de résistance due aux déformations transversales
Avantage:-bonne linéaritéInconvénients:- Jauges collées (incertitude de transmission, fluage, hystérésis, vieillissement)- Température: facteur de jauge, colle
Remarque: il existe des jauges à semi-conducteur dont le facteur de jauge est de 100 à 200 mais elles ont une linéarité inférieure et une forte sensibilité à T
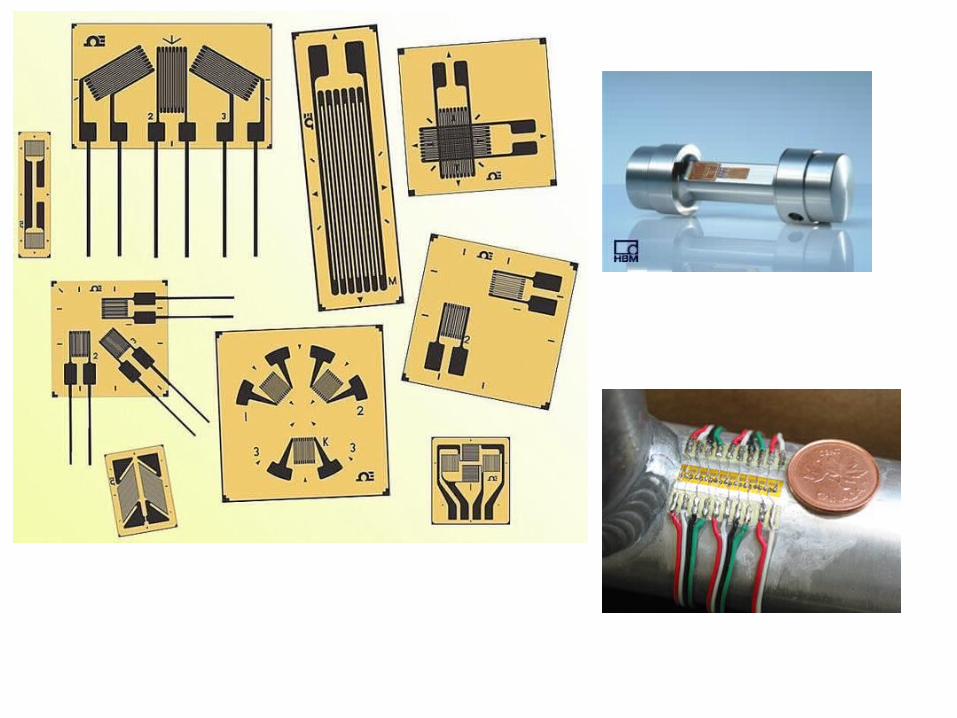

Exemples de capteurs à jauge de contraintes (en poutre, en acier inoxydables, miniatures) INTERFACE
Capteurs numériques de déplacement
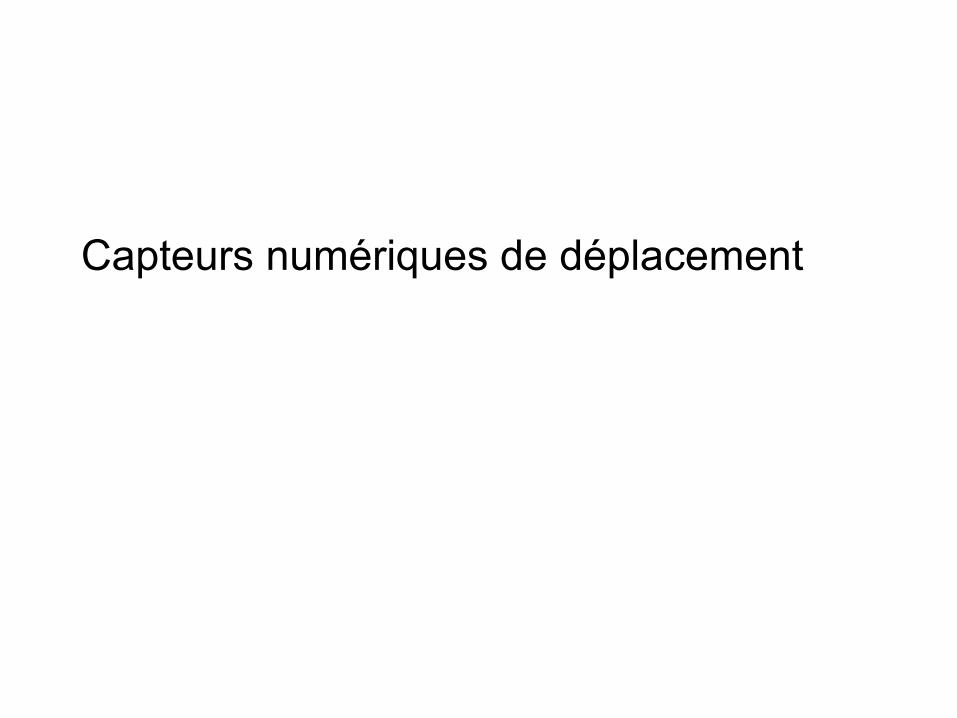
1- capteurs numériques de type binaire
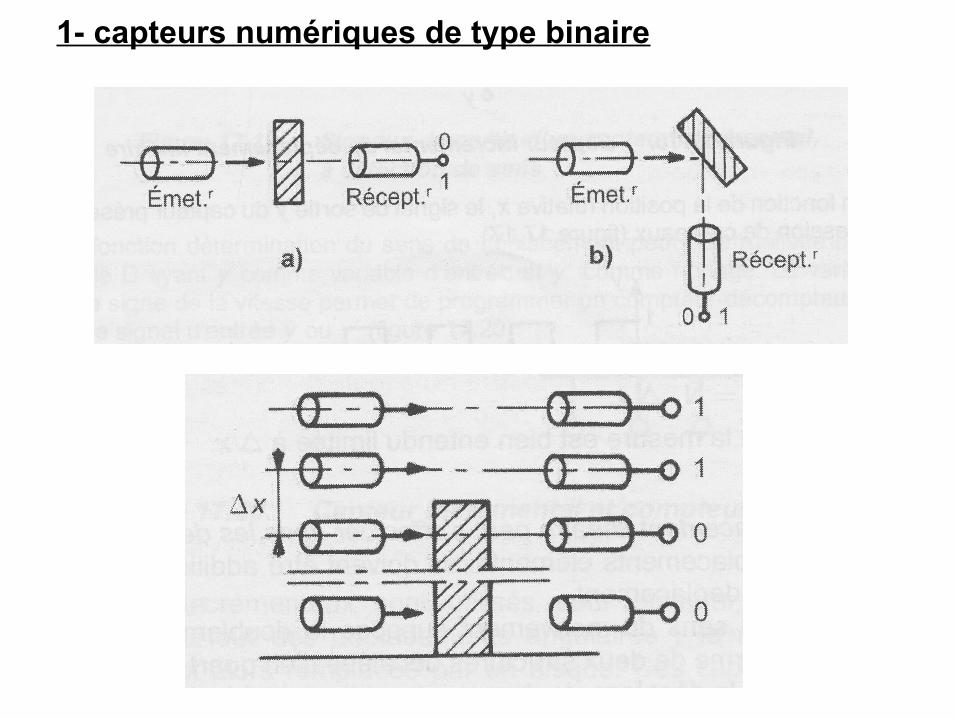
2- Capteurs digitaux
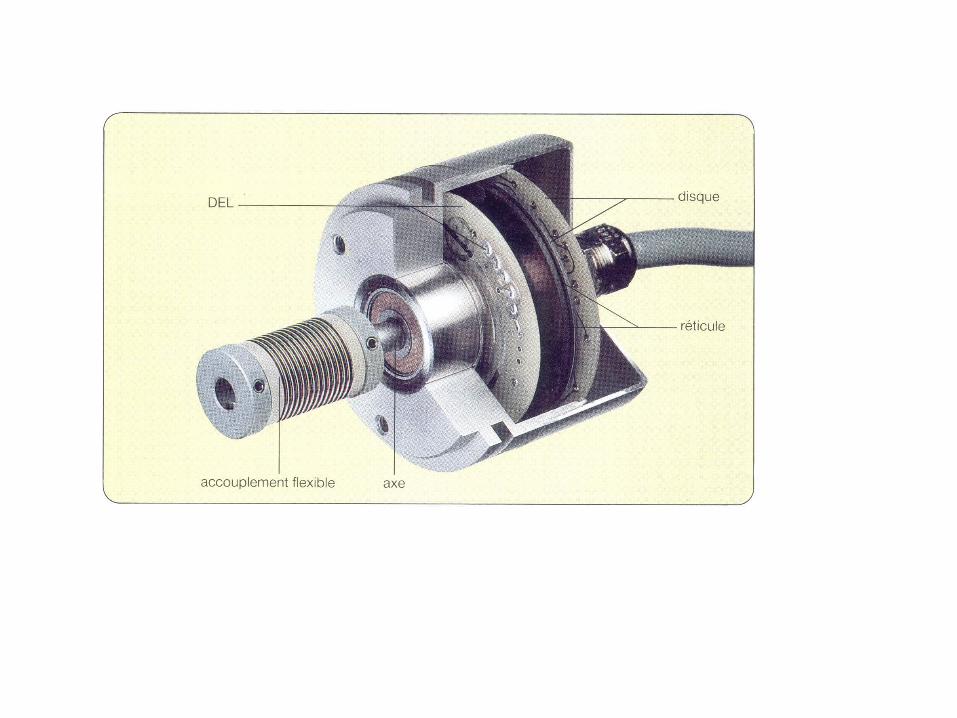
3-1 codeurs optiques
Un codeur optique est un système électromécanique dont la sortie représente sous forme numérique une fonction de la position angulaire
DEL
3-1-1 codeur « incrémental »
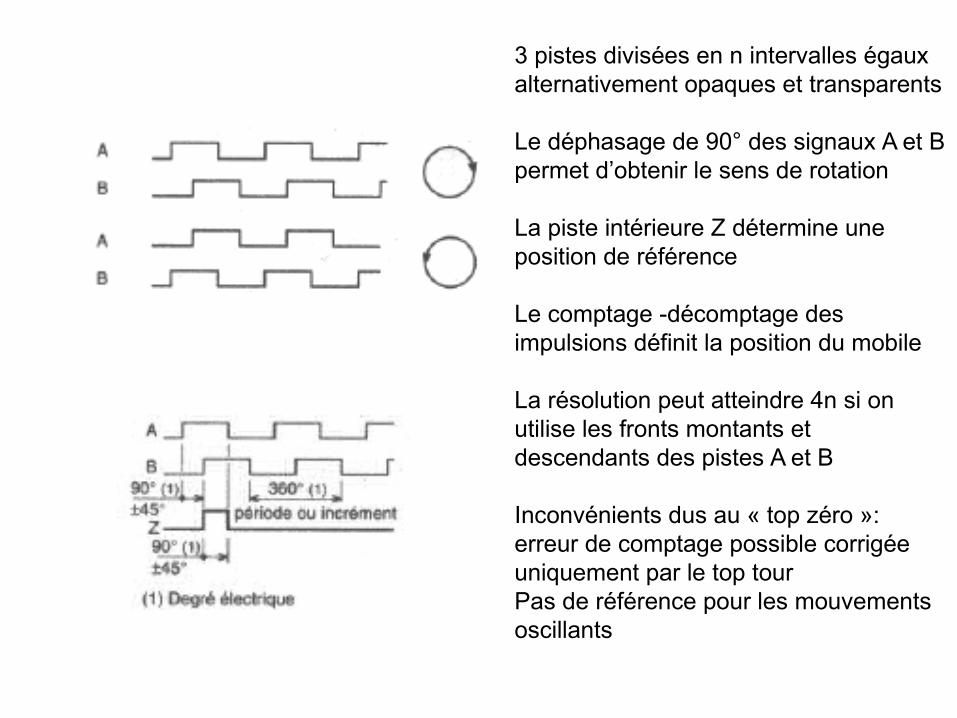
3 pistes divisées en n intervalles égaux alternativement opaques et transparents
Le déphasage de 90° des signaux A et B permet d’obtenir le sens de rotation
La piste intérieure Z détermine une position de référence
Le comptage -décomptage des impulsions définit la position du mobile
La résolution peut atteindre 4n si on utilise les fronts montants et descendants des pistes A et B
Inconvénients dus au « top zéro »: erreur de comptage possible corrigée uniquement par le top tourPas de référence pour les mouvements oscillants
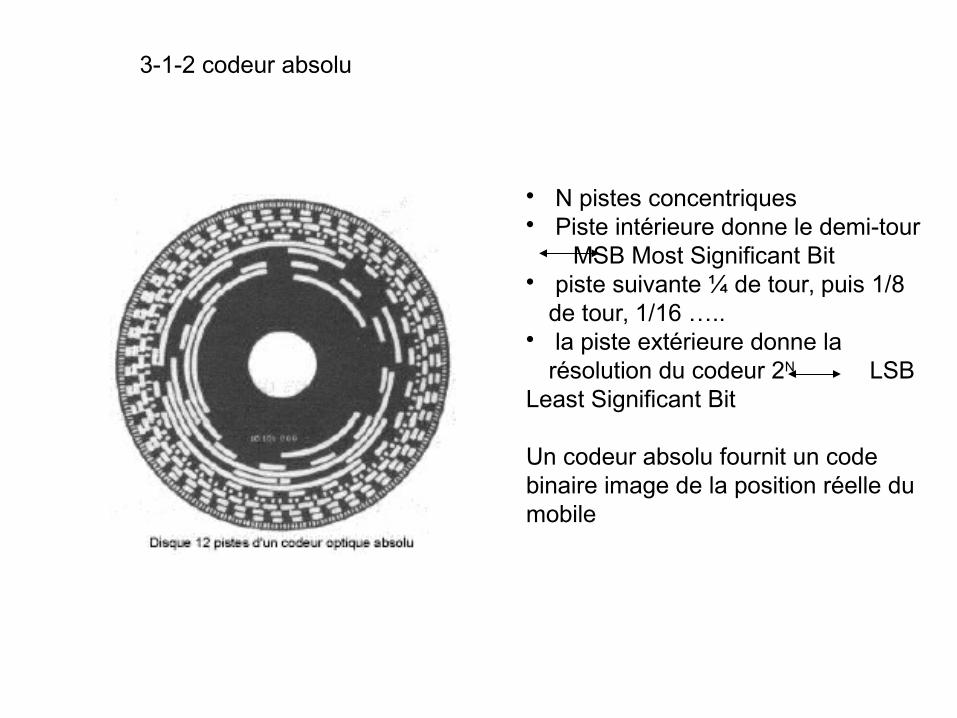
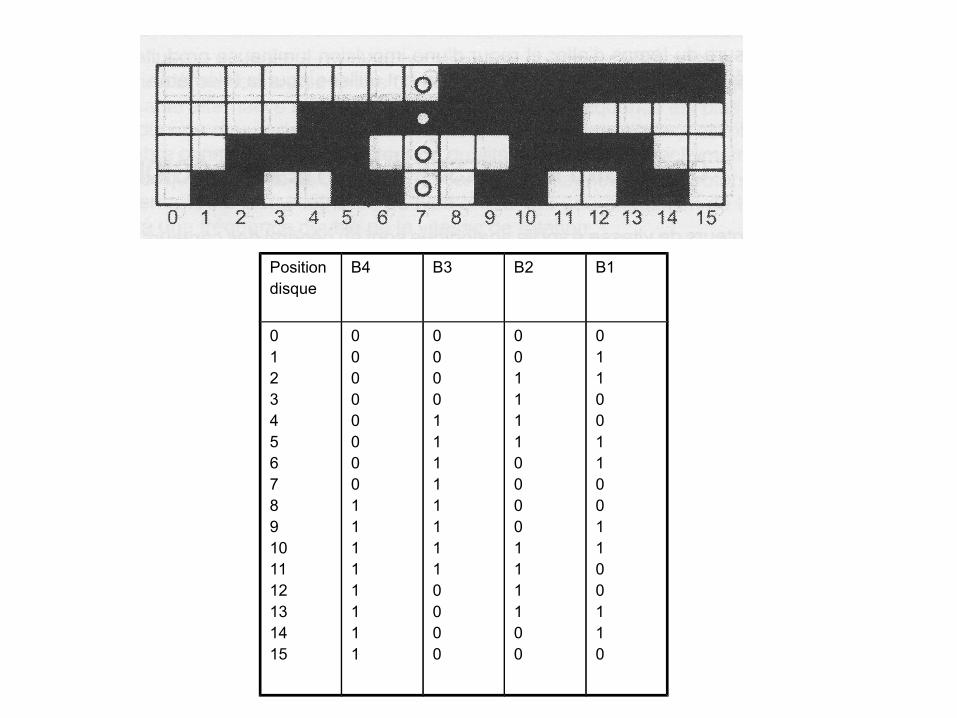
3-1-2 codeur absolu
• N pistes concentriques• Piste intérieure donne le demi-tour
MSB Most Significant Bit• piste suivante ¼ de tour, puis 1/8
de tour, 1/16 …..• la piste extérieure donne la
résolution du codeur 2N LSBLeast Significant Bit
Un codeur absolu fournit un code binaire image de la position réelle du mobile
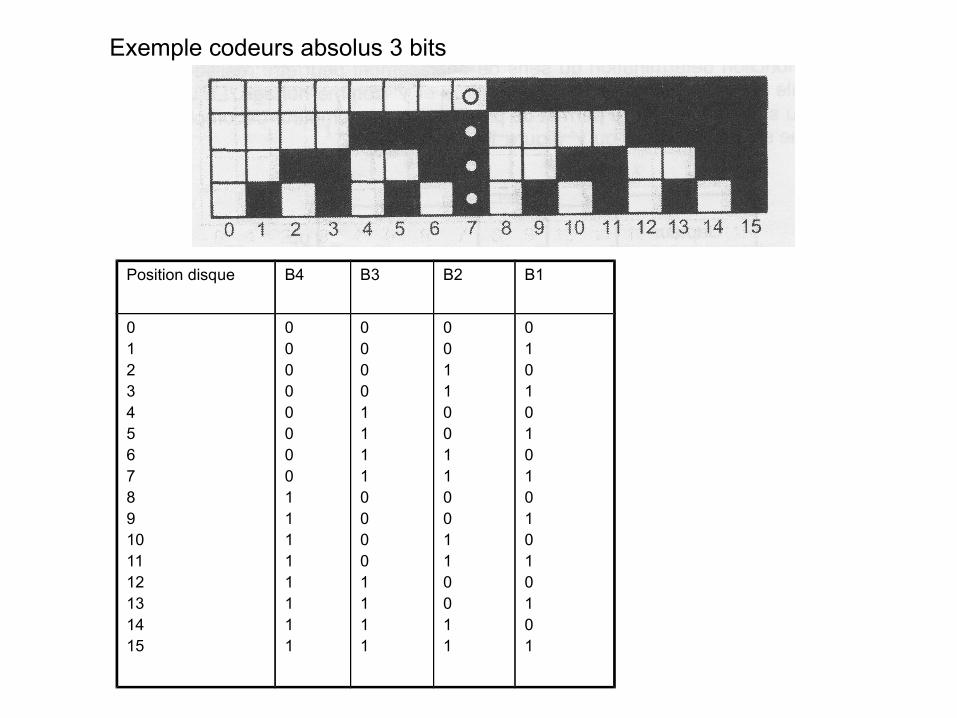
Exemple codeurs absolus 3 bits
Position disque B4 B3 B2 B1
0123456789101112131415
0000000011111111
0000111100001111
0011001100110011
0101010101010101
Positiondisque
B4 B3 B2 B1
0123456789101112131415
0000000011111111
0000111111110000
0011110000111100
0110011001100110
1- généralités:
Les capteurs de proximité sont caractérisés par l’absence de liaison mécanique avec l’objet dont ils mesurent la distance ou le déplacement.L’interaction intervient par l’intermédiaire d’un champ (champ d’induction magnétique, champ électromagnétique…). Ces capteurs sont donc très nombreux.
Avantages principaux de ces capteurs:- mesure de déplacements rapides (bande passante importante)- mesure sur matériaux fragiles- isolement galvanique entre l’objet et le circuit de mesure- grande finesse- grande durée de vie
Inconvénients:-influence de la forme, de la nature, des dimensions de la cible- étendue de mesure généralement faible (de l’ordre du mm)- non linéarité
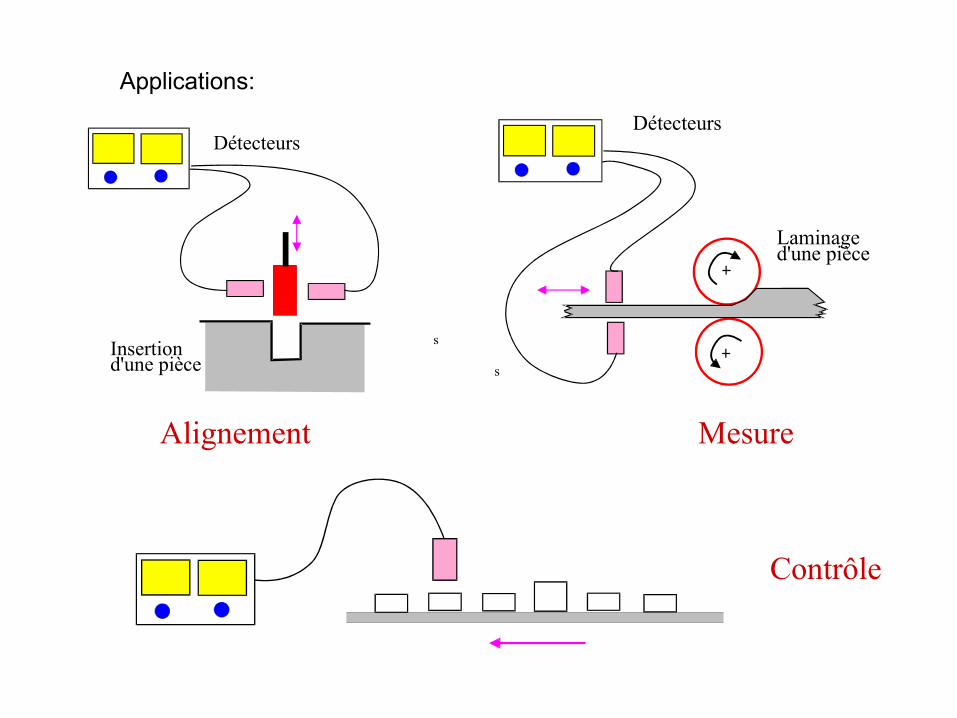
Insertiond'une pièce
s
Détecteurs
s
Laminaged'une pièce
Détecteurs
Alignement Mesure
Contrôle
Applications:
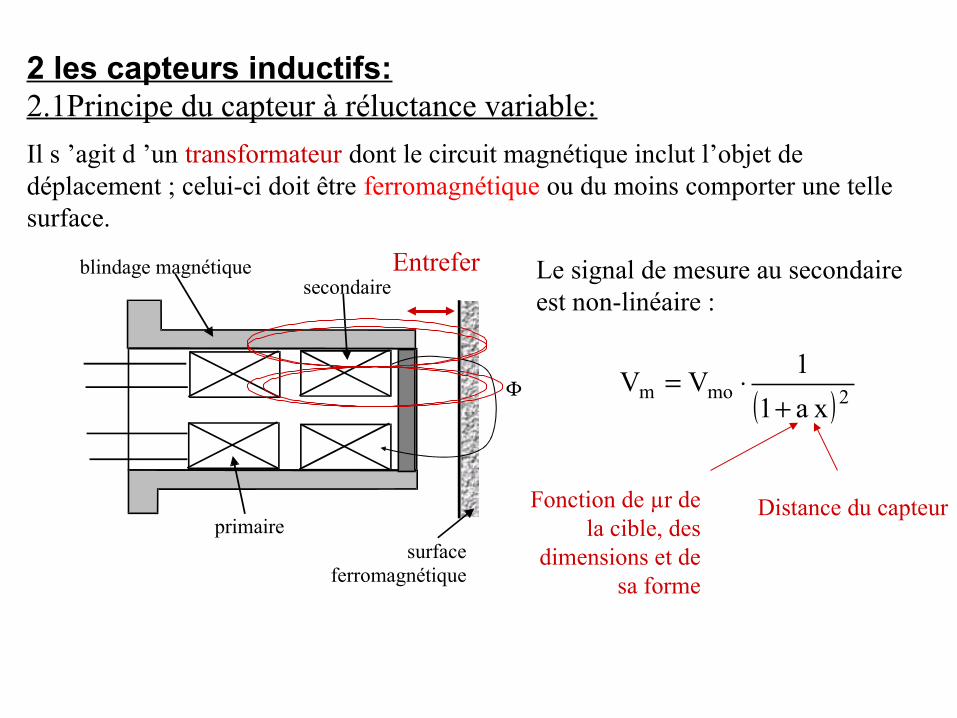
2 les capteurs inductifs:2.1Principe du capteur à réluctance variable:
Il s ’agit d ’un transformateur dont le circuit magnétique inclut l’objet de déplacement ; celui-ci doit être ferromagnétique ou du moins comporter une telle surface.
primaire
secondaire
surface ferromagnétique
blindage magnétique
2momxa1
1VV
Entrefer Le signal de mesure au secondaire est non-linéaire :
Distance du capteurFonction de µr de la cible, des
dimensions et de sa forme
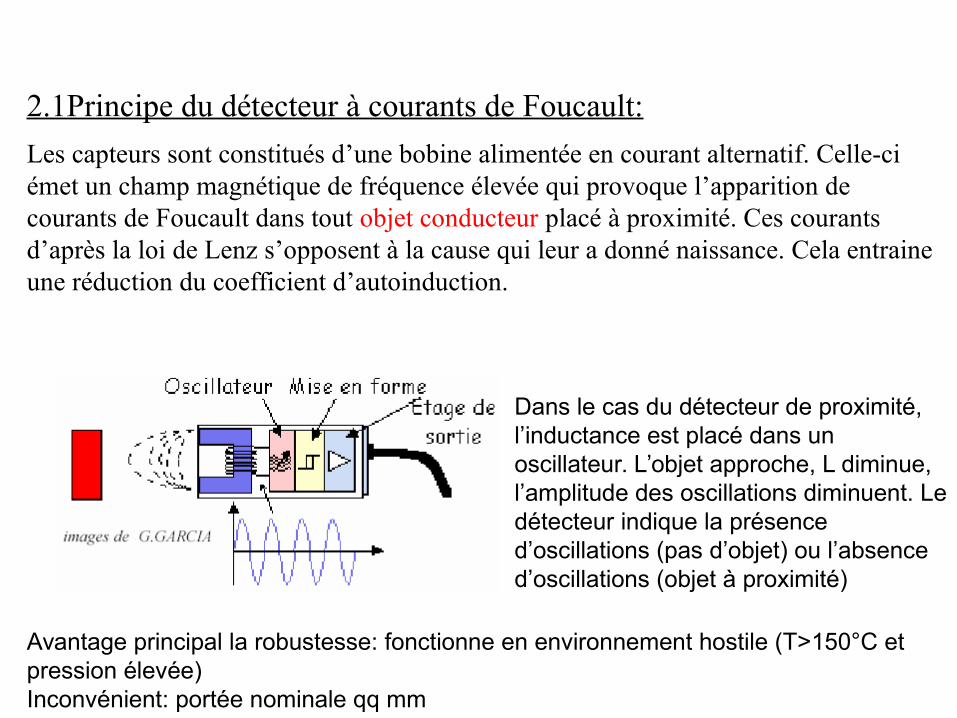
2.1Principe du détecteur à courants de Foucault:
Les capteurs sont constitués d’une bobine alimentée en courant alternatif. Celle-ci émet un champ magnétique de fréquence élevée qui provoque l’apparition de courants de Foucault dans tout objet conducteur placé à proximité. Ces courants d’après la loi de Lenz s’opposent à la cause qui leur a donné naissance. Cela entraine une réduction du coefficient d’autoinduction.
Dans le cas du détecteur de proximité, l’inductance est placé dans un oscillateur. L’objet approche, L diminue, l’amplitude des oscillations diminuent. Le détecteur indique la présence d’oscillations (pas d’objet) ou l’absence d’oscillations (objet à proximité)
Avantage principal la robustesse: fonctionne en environnement hostile (T>150°C et pression élevée)Inconvénient: portée nominale qq mm
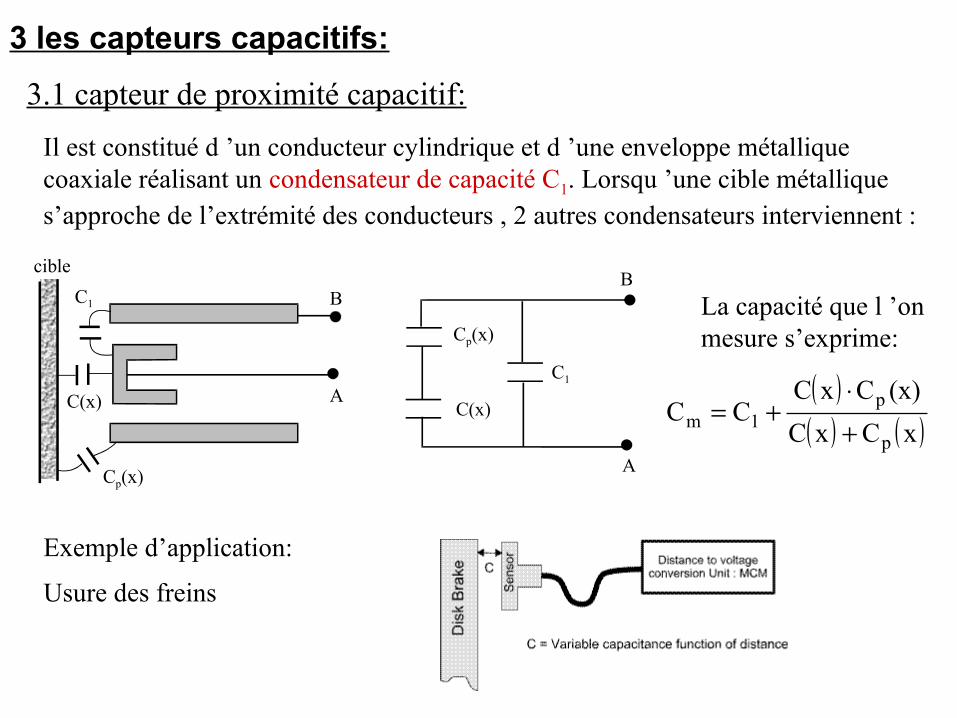
3.1 capteur de proximité capacitif:
Il est constitué d ’un conducteur cylindrique et d ’une enveloppe métallique coaxiale réalisant un condensateur de capacité C1. Lorsqu ’une cible métallique s’approche de l’extrémité des conducteurs , 2 autres condensateurs interviennent :
C1
Cp(x)
C(x)
B
A
cible
Cp(x)
C(x)
C1
B
A
xCxC
(x)CxCCC
p
p1m
La capacité que l ’on mesure s’exprime:
3 les capteurs capacitifs:
Exemple d’application:
Usure des freins
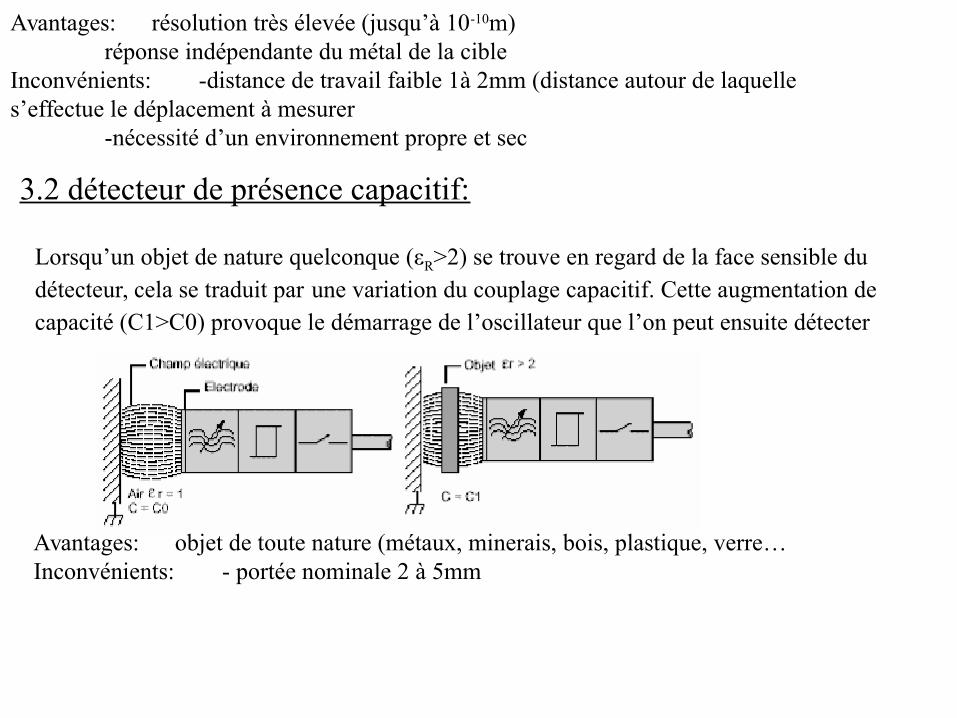
3.2 détecteur de présence capacitif:
Lorsqu’un objet de nature quelconque (εR>2) se trouve en regard de la face sensible du détecteur, cela se traduit par une variation du couplage capacitif. Cette augmentation de capacité (C1>C0) provoque le démarrage de l’oscillateur que l’on peut ensuite détecter
Avantages: résolution très élevée (jusqu’à 10-10m)réponse indépendante du métal de la cible
Inconvénients: -distance de travail faible 1à 2mm (distance autour de laquelle s’effectue le déplacement à mesurer
-nécessité d’un environnement propre et sec
Avantages: objet de toute nature (métaux, minerais, bois, plastique, verre…Inconvénients: - portée nominale 2 à 5mm
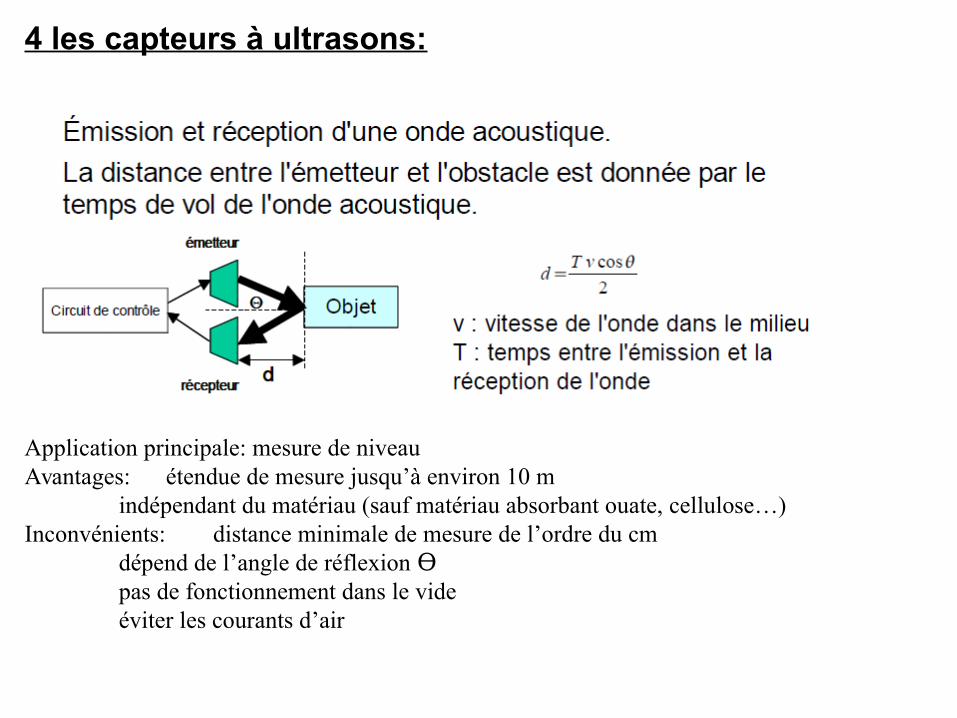
4 les capteurs à ultrasons:
Application principale: mesure de niveauAvantages: étendue de mesure jusqu’à environ 10 m
indépendant du matériau (sauf matériau absorbant ouate, cellulose…)Inconvénients: distance minimale de mesure de l’ordre du cm
dépend de l’angle de réflexion ϴpas de fonctionnement dans le videéviter les courants d’air
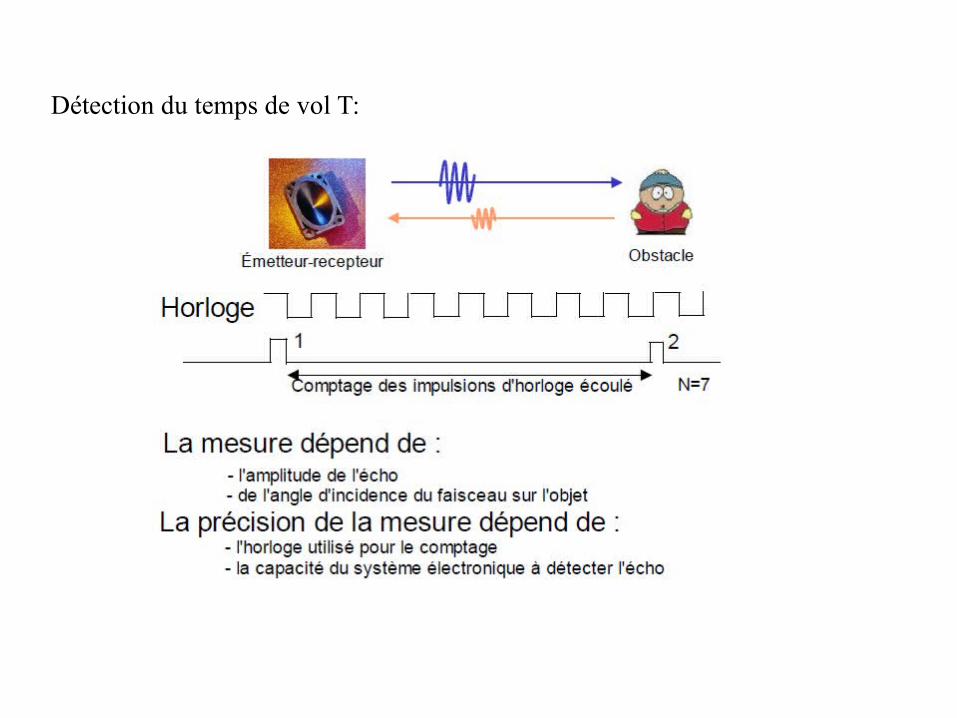
Détection du temps de vol T:
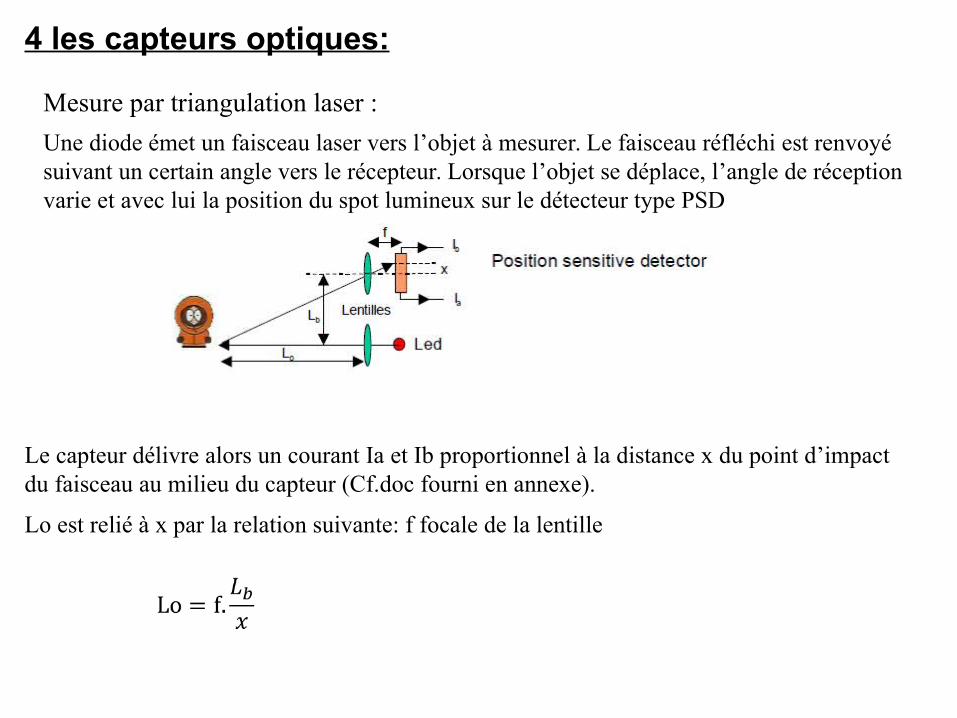
4 les capteurs optiques:
Mesure par triangulation laser :
Une diode émet un faisceau laser vers l’objet à mesurer. Le faisceau réfléchi est renvoyé suivant un certain angle vers le récepteur. Lorsque l’objet se déplace, l’angle de réception varie et avec lui la position du spot lumineux sur le détecteur type PSD
Le capteur délivre alors un courant Ia et Ib proportionnel à la distance x du point d’impact du faisceau au milieu du capteur (Cf.doc fourni en annexe).
Lo est relié à x par la relation suivante: f focale de la lentille
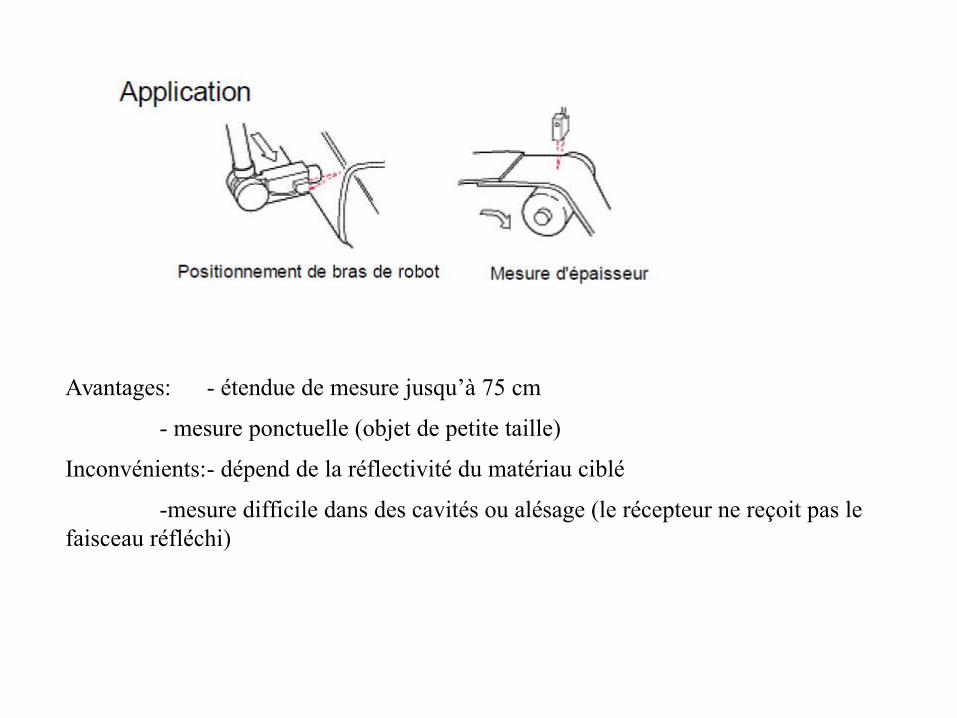
Avantages: - étendue de mesure jusqu’à 75 cm
- mesure ponctuelle (objet de petite taille)
Inconvénients:- dépend de la réflectivité du matériau ciblé
-mesure difficile dans des cavités ou alésage (le récepteur ne reçoit pas le faisceau réfléchi)
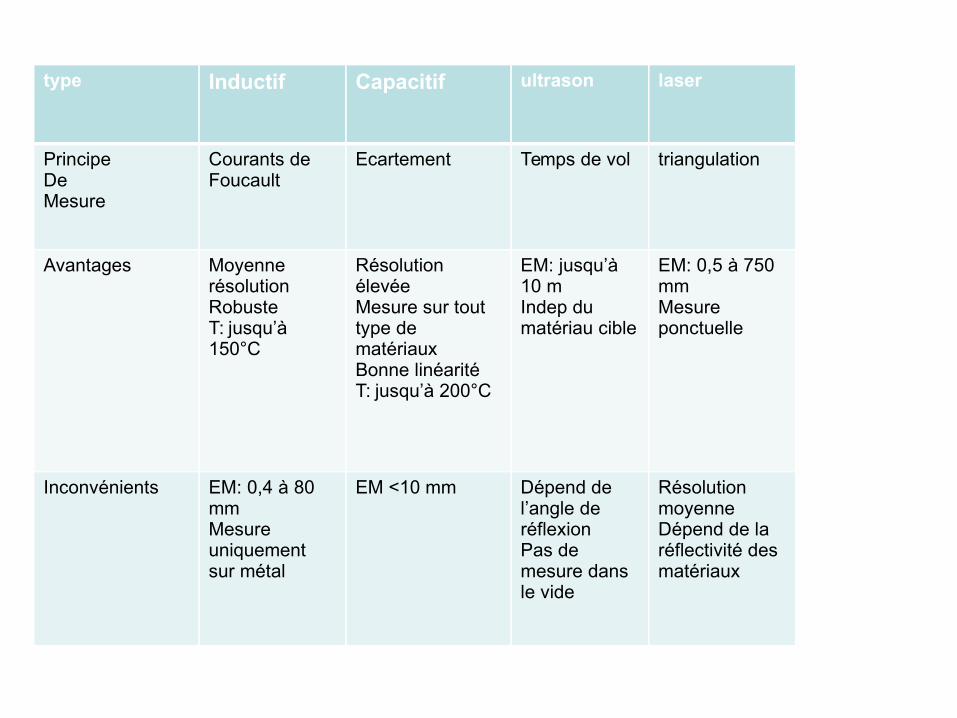
type Inductif Capacitif ultrason laser
PrincipeDeMesure
Courants de Foucault
Ecartement Temps de vol triangulation
Avantages Moyenne résolutionRobusteT: jusqu’à 150°C
Résolution élevéeMesure sur tout type de matériauxBonne linéaritéT: jusqu’à 200°C
EM: jusqu’à 10 mIndep du matériau cible
EM: 0,5 à 750 mmMesure ponctuelle
Inconvénients EM: 0,4 à 80 mmMesure uniquement sur métal
EM <10 mm Dépend de l’angle de réflexionPas de mesure dans le vide
Résolution moyenneDépend de la réflectivité des matériaux
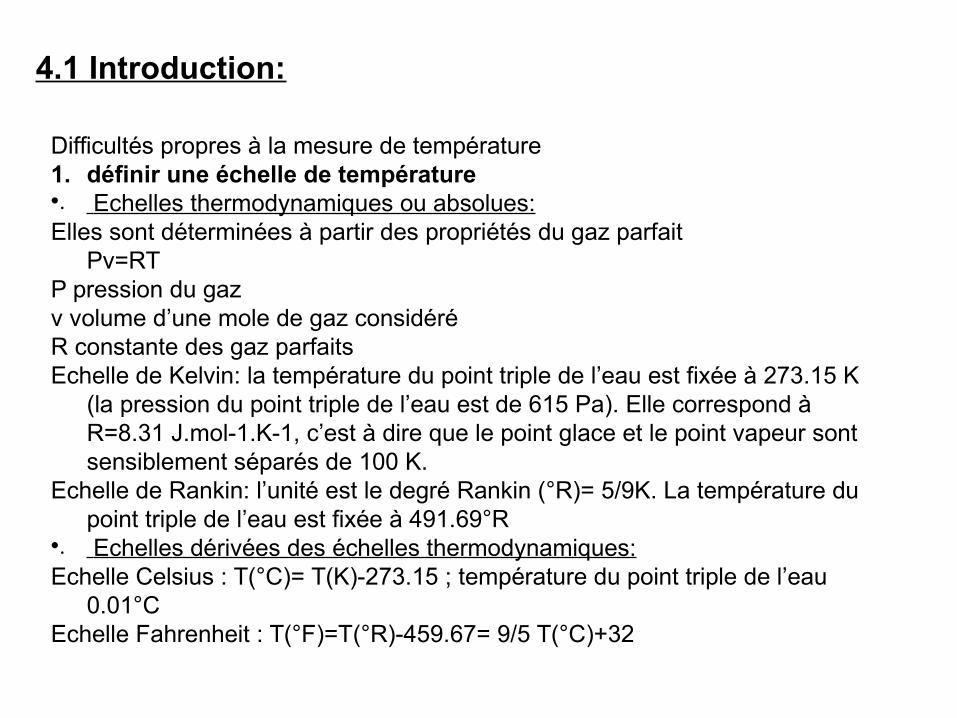
Difficultés propres à la mesure de température1. définir une échelle de température•. Echelles thermodynamiques ou absolues:Elles sont déterminées à partir des propriétés du gaz parfait
Pv=RTP pression du gazv volume d’une mole de gaz considéréR constante des gaz parfaitsEchelle de Kelvin: la température du point triple de l’eau est fixée à 273.15 K
(la pression du point triple de l’eau est de 615 Pa). Elle correspond à R=8.31 J.mol-1.K-1, c’est à dire que le point glace et le point vapeur sont sensiblement séparés de 100 K.
Echelle de Rankin: l’unité est le degré Rankin (°R)= 5/9K. La température du point triple de l’eau est fixée à 491.69°R
•. Echelles dérivées des échelles thermodynamiques:Echelle Celsius : T(°C)= T(K)-273.15 ; température du point triple de l’eau
0.01°CEchelle Fahrenheit : T(°F)=T(°R)-459.67= 9/5 T(°C)+32
4.1 Introduction:
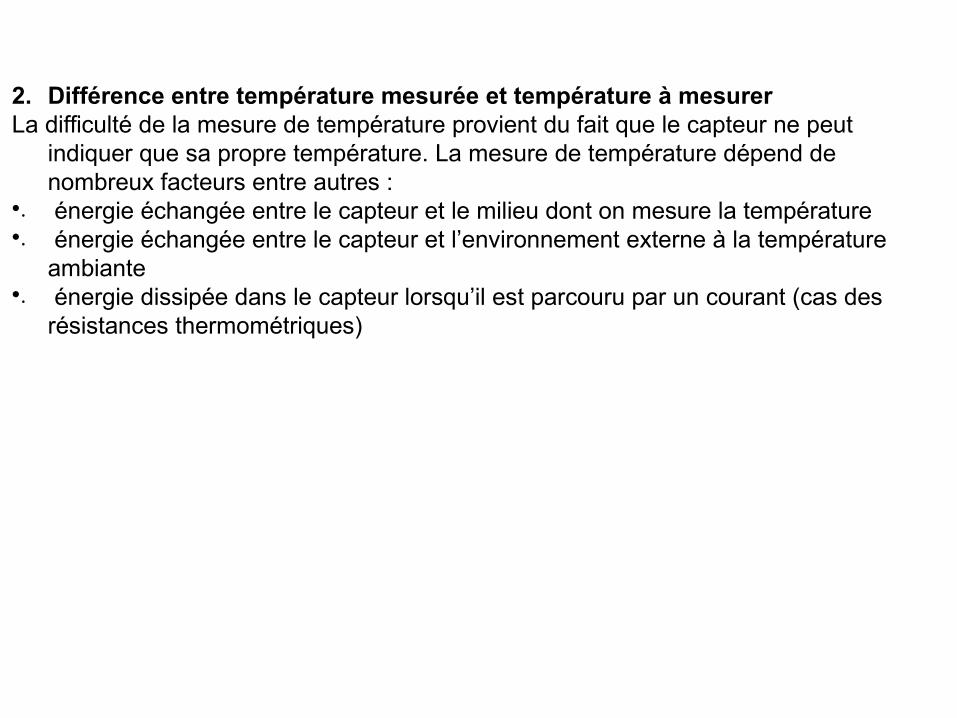
2. Différence entre température mesurée et température à mesurerLa difficulté de la mesure de température provient du fait que le capteur ne peut
indiquer que sa propre température. La mesure de température dépend de nombreux facteurs entre autres :
•. énergie échangée entre le capteur et le milieu dont on mesure la température •. énergie échangée entre le capteur et l’environnement externe à la température
ambiante•. énergie dissipée dans le capteur lorsqu’il est parcouru par un courant (cas des
résistances thermométriques)
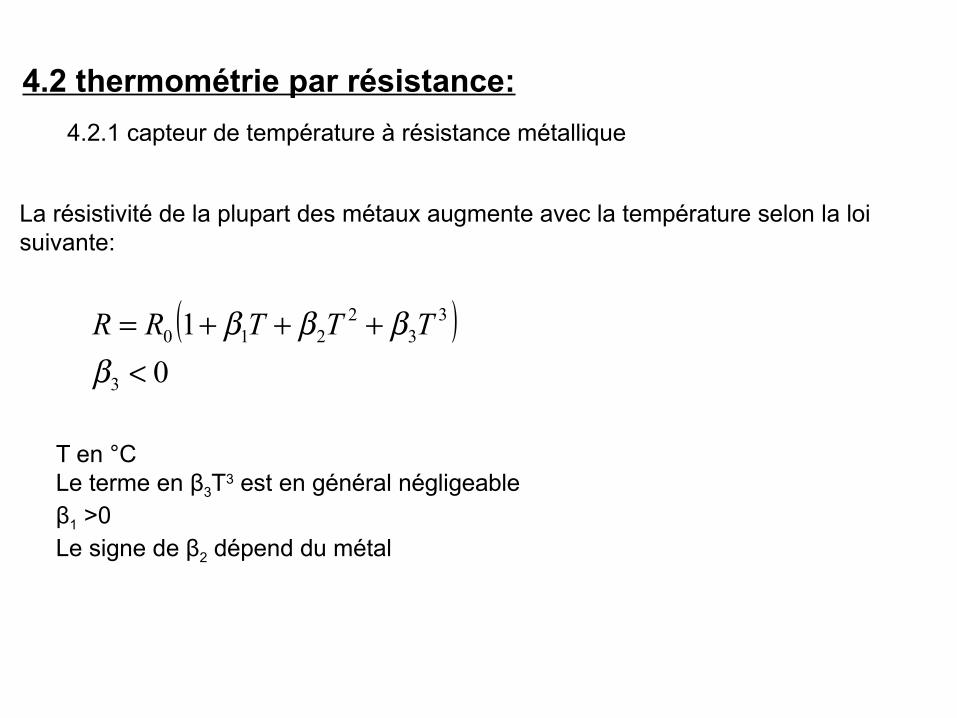
4.2 thermométrie par résistance:
4.2.1 capteur de température à résistance métallique
La résistivité de la plupart des métaux augmente avec la température selon la loi suivante:
0
1
3
33
2210
TTTRR
T en °CLe terme en β3T3 est en général négligeableβ1 >0Le signe de β2 dépend du métal
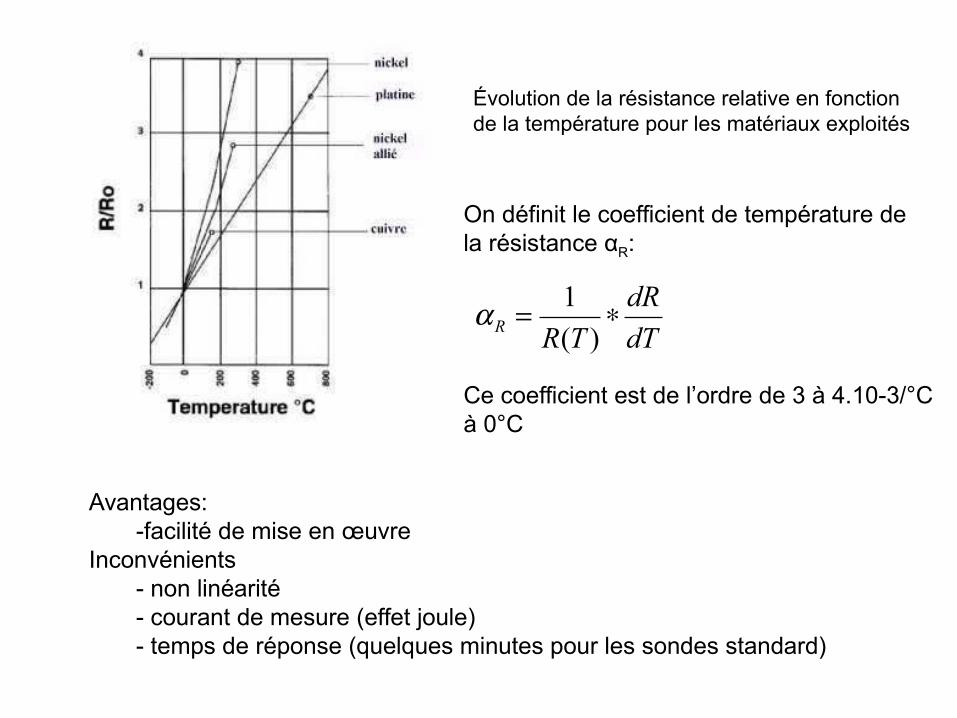
Évolution de la résistance relative en fonction de la température pour les matériaux exploités
On définit le coefficient de température de la résistance αR:
dT
dR
TRR )(
1
Ce coefficient est de l’ordre de 3 à 4.10-3/°C à 0°C
Avantages:-facilité de mise en œuvre
Inconvénients- non linéarité- courant de mesure (effet joule)- temps de réponse (quelques minutes pour les sondes standard)
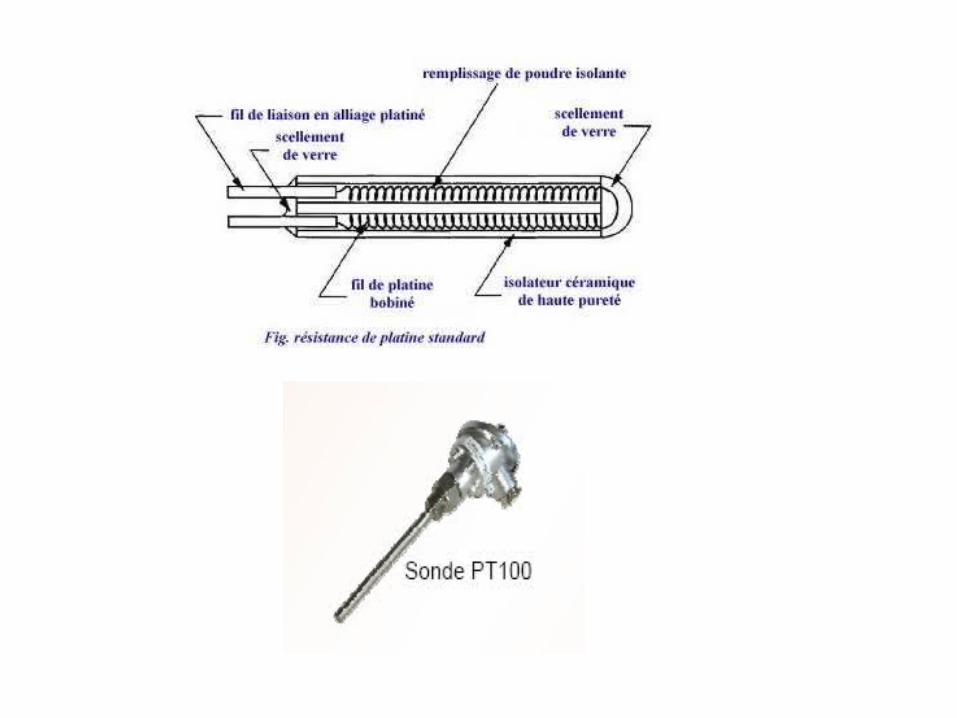
Métaux utilisés:Platine : bonne inertie chimique, grande reproductibilité des caractéristiques des sondes (-200°C<T<1000°C)Nickel : sensibilité thermique accrue mais linéarité moins bonne que le platine et forte réactivité chimique (T<250°C)Cuivre : grande linéarité mais forte réactivité chimique (T<180°C)Tungstène : utilisation aux températures élevées à la place du platine
Résistances normalisées :- platine PT100: 100 ohms à 0°C
αR=3,9.10-3/°C à 0°C-nickel: 50 ohms à 25 °C
αR=5,5.10-3/°C à 0°C
AN: Calcul de l’évolution V aux bornes d’une sonde PT100 parcourue par un courant faible 10mA (à cause de l’échauffement) lorsque la température à mesurer passe de 0 à 1°C
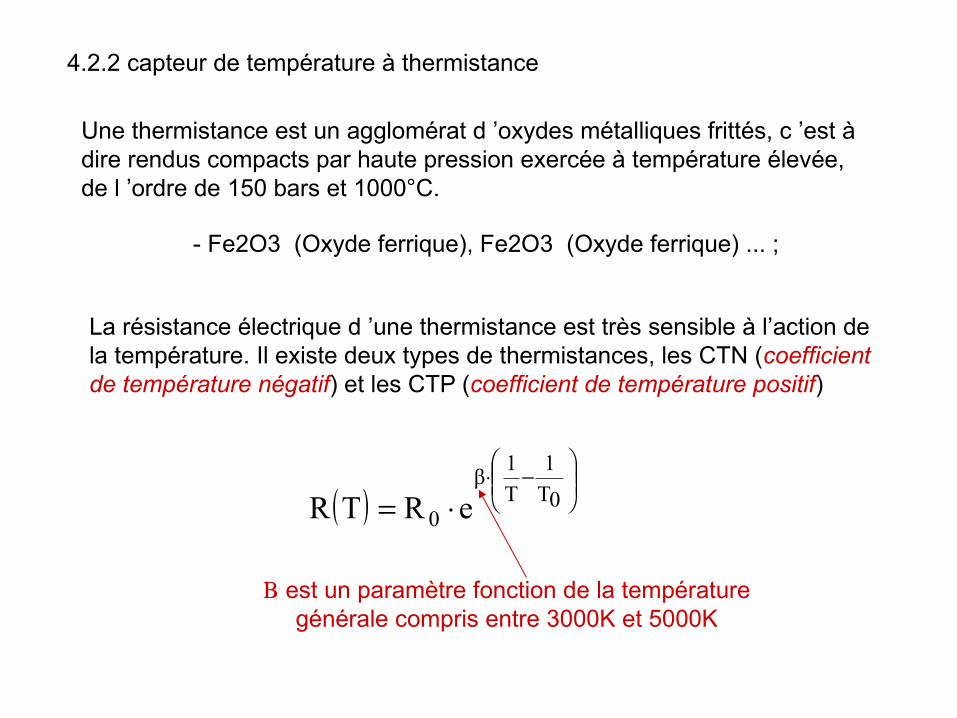
4.2.2 capteur de température à thermistance
Une thermistance est un agglomérat d ’oxydes métalliques frittés, c ’est à dire rendus compacts par haute pression exercée à température élevée, de l ’ordre de 150 bars et 1000°C.
- Fe2O3 (Oxyde ferrique), Fe2O3 (Oxyde ferrique) ... ;
La résistance électrique d ’une thermistance est très sensible à l’action de la température. Il existe deux types de thermistances, les CTN (coefficient de température négatif) et les CTP (coefficient de température positif)
0T
1
T
1β
0 eRTR
est un paramètre fonction de la température générale compris entre 3000K et 5000K
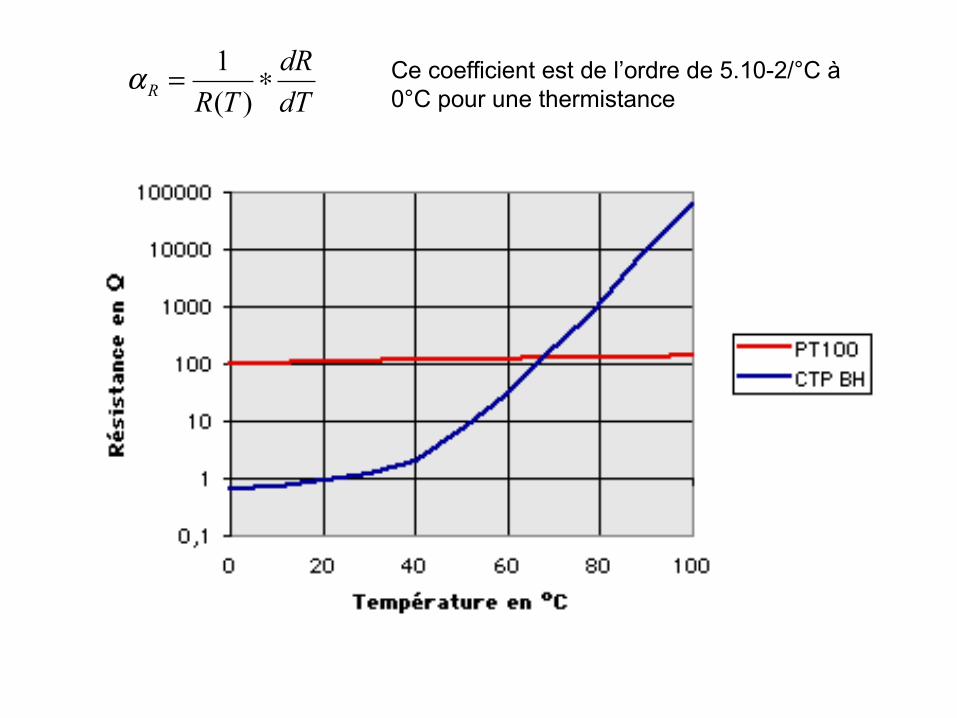
dT
dR
TRR )(
1 Ce coefficient est de l’ordre de 5.10-2/°C à 0°C pour une thermistance
Domaine d’utilisation: - 100°C à +300°CAvantages:
- meilleure sensibilité que les résistances métalliques- disponibles sous des formes variées (faible encombrement)- temps de réponse élevé
Inconvénients- non linéarité- courant de mesure (effet joule)- interchangeabilité médiocre- mauvaise stabilité à long terme
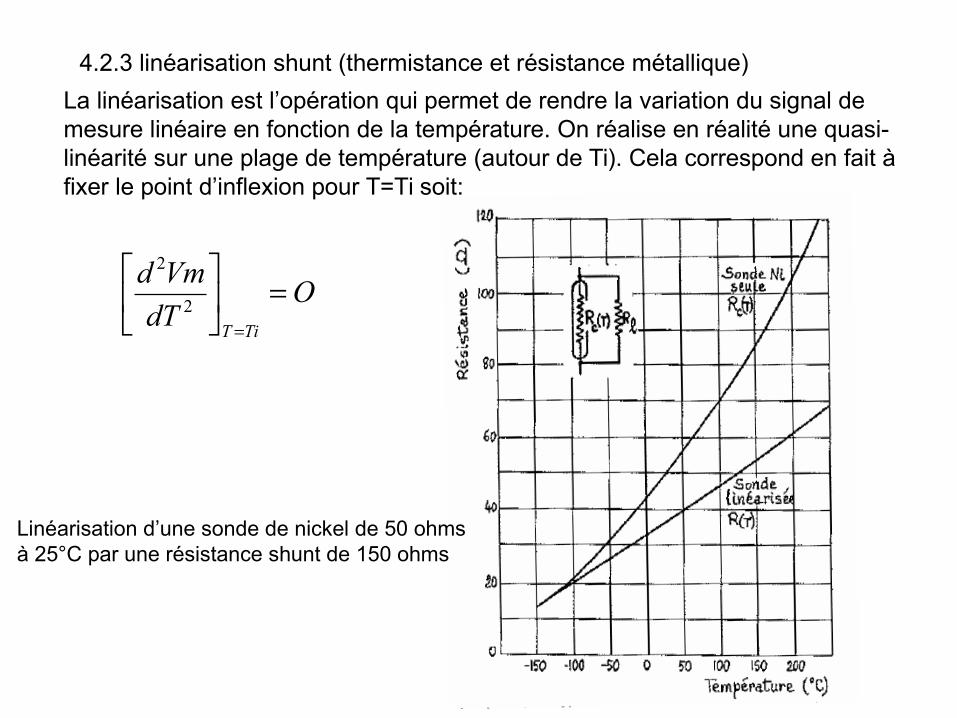
La linéarisation est l’opération qui permet de rendre la variation du signal de mesure linéaire en fonction de la température. On réalise en réalité une quasi-linéarité sur une plage de température (autour de Ti). Cela correspond en fait à fixer le point d’inflexion pour T=Ti soit:
OdT
Vmd
TiT
2
2
Linéarisation d’une sonde de nickel de 50 ohms à 25°C par une résistance shunt de 150 ohms
4.2.3 linéarisation shunt (thermistance et résistance métallique)
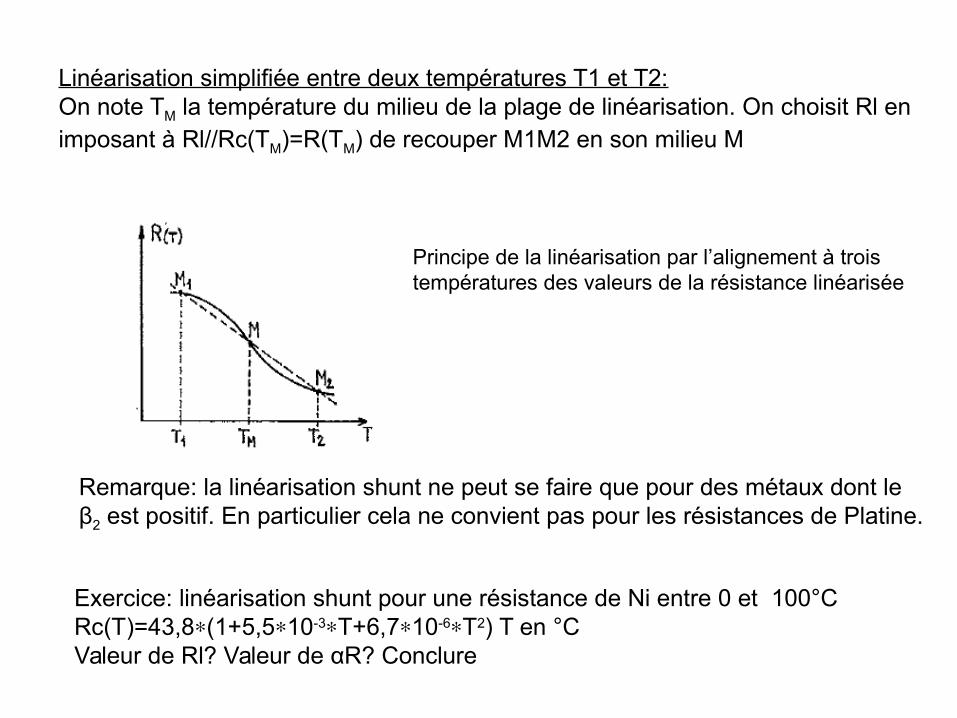
Linéarisation simplifiée entre deux températures T1 et T2:On note TM la température du milieu de la plage de linéarisation. On choisit Rl en imposant à Rl//Rc(TM)=R(TM) de recouper M1M2 en son milieu M
Principe de la linéarisation par l’alignement à trois températures des valeurs de la résistance linéarisée
Exercice: linéarisation shunt pour une résistance de Ni entre 0 et 100°CRc(T)=43,8(1+5,510-3T+6,710-6T2) T en °CValeur de Rl? Valeur de αR? Conclure
Remarque: la linéarisation shunt ne peut se faire que pour des métaux dont le β2 est positif. En particulier cela ne convient pas pour les résistances de Platine.

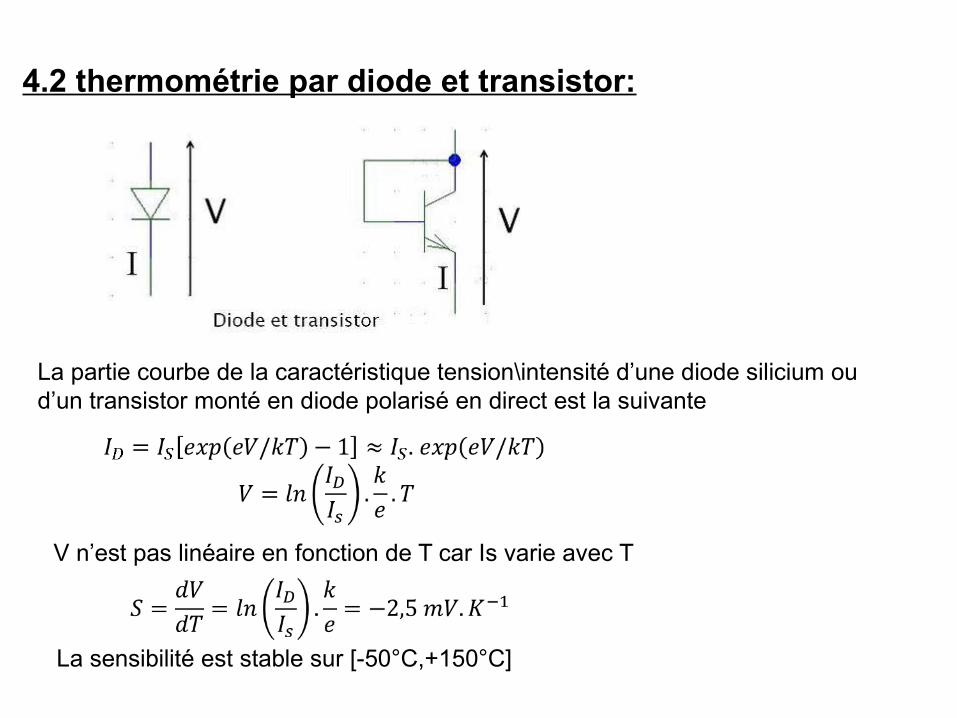
4.2 thermométrie par diode et transistor:
La partie courbe de la caractéristique tension\intensité d’une diode silicium ou d’un transistor monté en diode polarisé en direct est la suivante
V n’est pas linéaire en fonction de T car Is varie avec T
La sensibilité est stable sur [-50°C,+150°C]
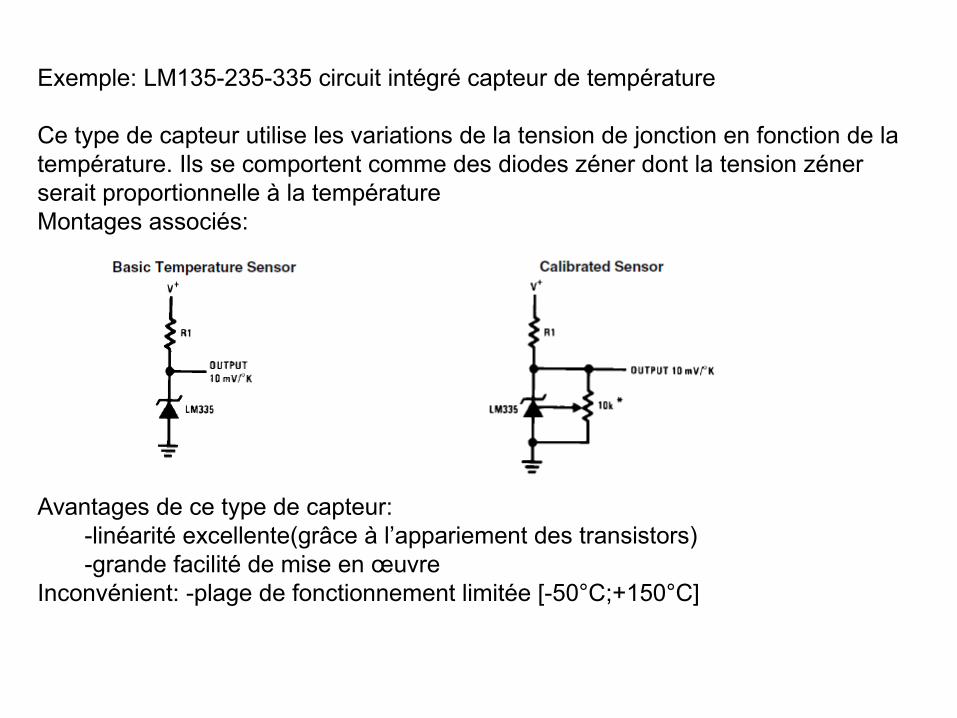
Exemple: LM135-235-335 circuit intégré capteur de température
Ce type de capteur utilise les variations de la tension de jonction en fonction de la température. Ils se comportent comme des diodes zéner dont la tension zéner serait proportionnelle à la températureMontages associés:
Avantages de ce type de capteur:-linéarité excellente(grâce à l’appariement des transistors)-grande facilité de mise en œuvre
Inconvénient: -plage de fonctionnement limitée [-50°C;+150°C]
4.3- thermoélectricité et thermocouples
T2T1
A
B
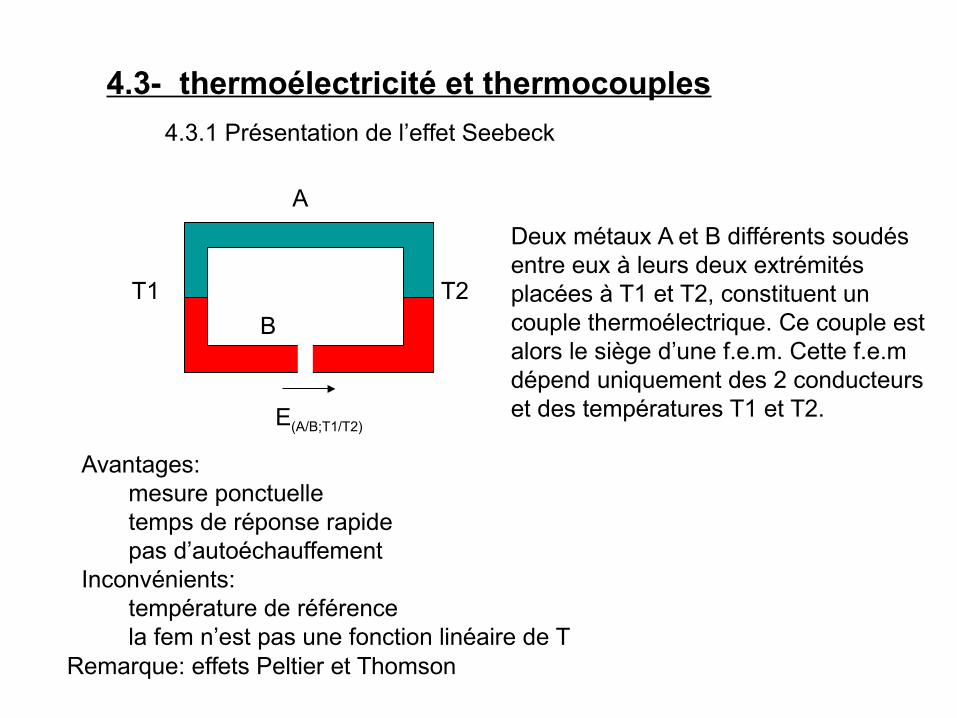
4.3.1 Présentation de l’effet Seebeck
E(A/B;T1/T2)
Remarque: effets Peltier et Thomson
Deux métaux A et B différents soudés entre eux à leurs deux extrémités placées à T1 et T2, constituent un couple thermoélectrique. Ce couple est alors le siège d’une f.e.m. Cette f.e.m dépend uniquement des 2 conducteurs et des températures T1 et T2.
Avantages:mesure ponctuelletemps de réponse rapidepas d’autoéchauffement
Inconvénients:température de référencela fem n’est pas une fonction linéaire de T
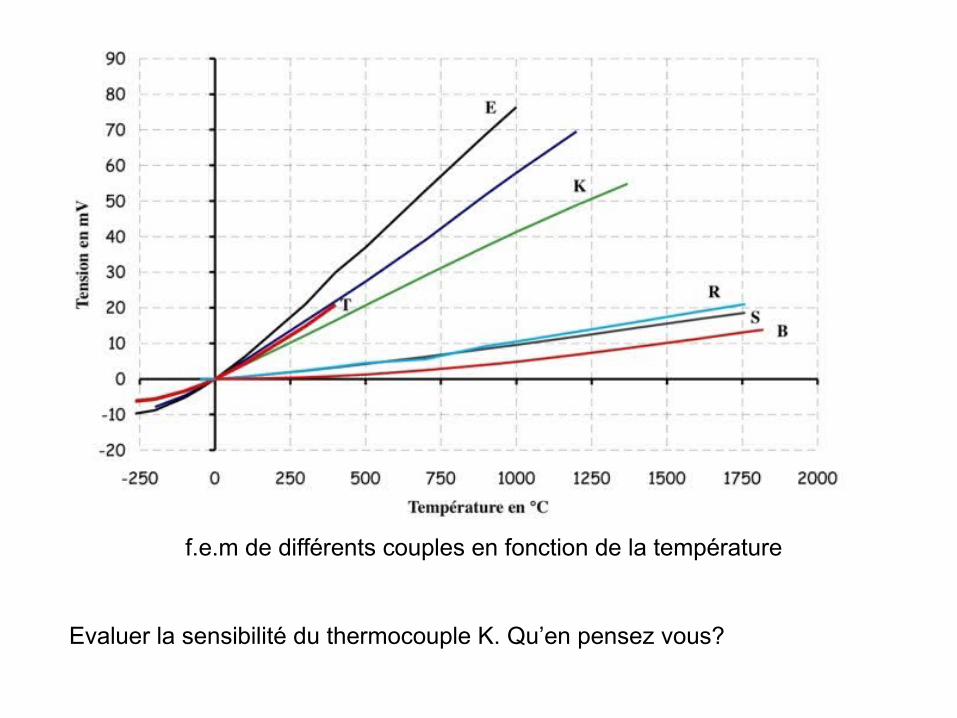
f.e.m de différents couples en fonction de la température
Evaluer la sensibilité du thermocouple K. Qu’en pensez vous?
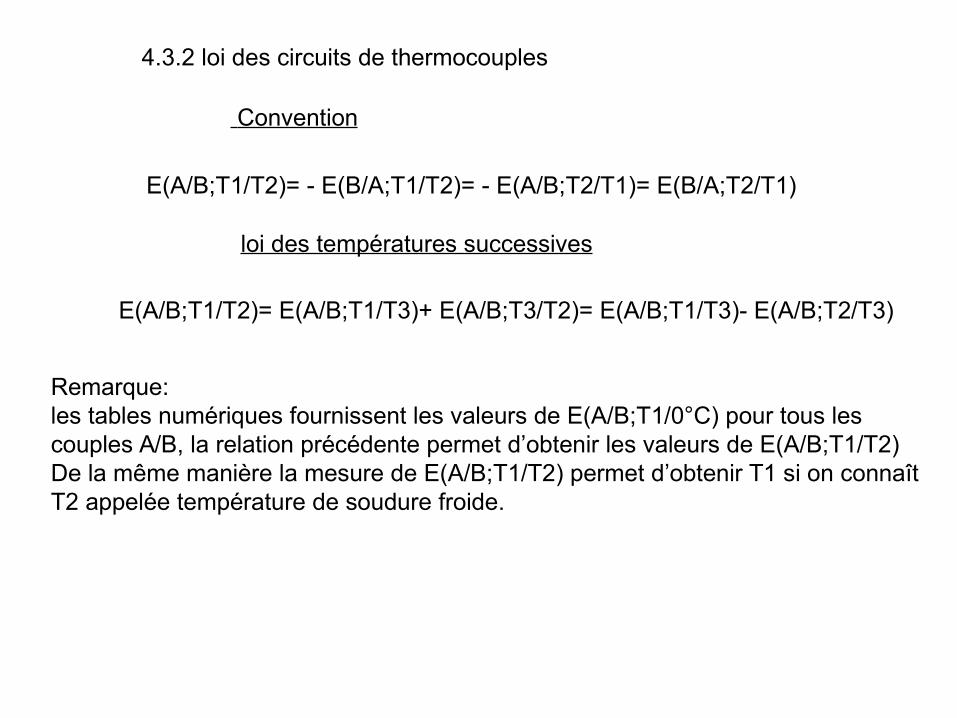
4.3.2 loi des circuits de thermocouples
Convention
E(A/B;T1/T2)= - E(B/A;T1/T2)= - E(A/B;T2/T1)= E(B/A;T2/T1)
loi des températures successives
E(A/B;T1/T2)= E(A/B;T1/T3)+ E(A/B;T3/T2)= E(A/B;T1/T3)- E(A/B;T2/T3)
Remarque: les tables numériques fournissent les valeurs de E(A/B;T1/0°C) pour tous les couples A/B, la relation précédente permet d’obtenir les valeurs de E(A/B;T1/T2)De la même manière la mesure de E(A/B;T1/T2) permet d’obtenir T1 si on connaît T2 appelée température de soudure froide.
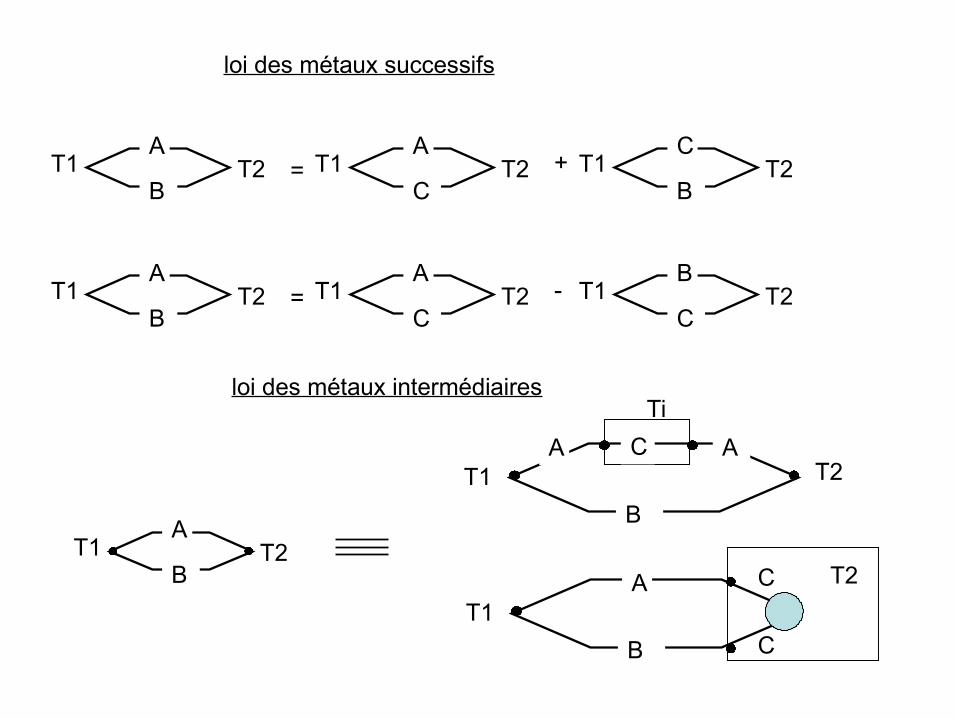
loi des métaux successifs
loi des métaux intermédiaires
A
BT1 T2
A
CT1 T2
C
BT1 T2= +
A
BT1 T2
A
CT1 T2
B
CT1 T2= -
A
BT1 T2
A
B
T1 T2AC
A
B
T1
T2
Ti
C
C
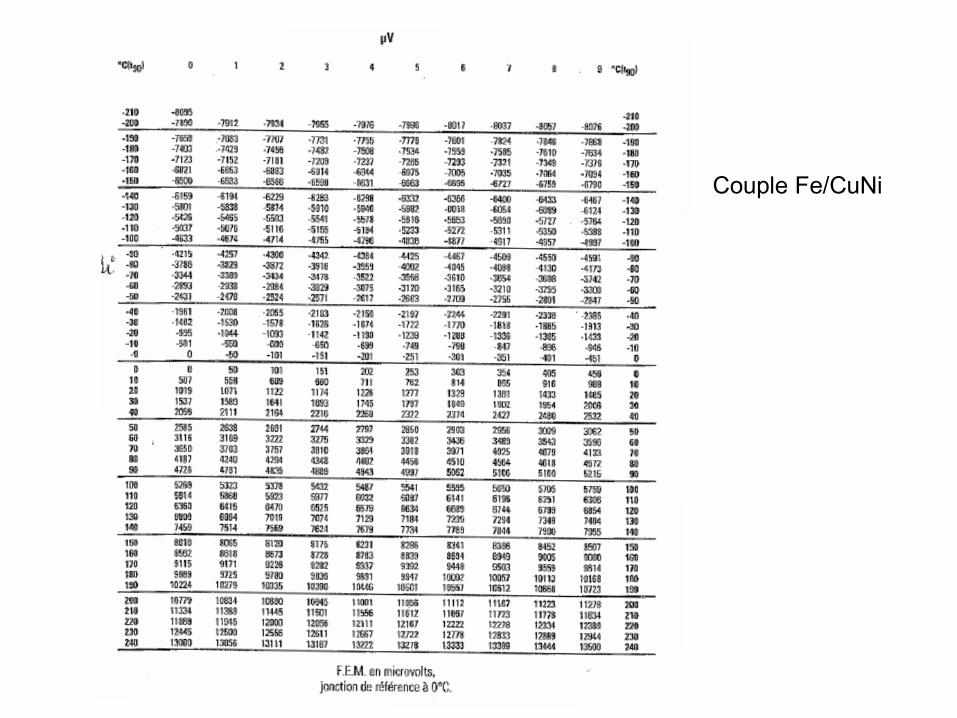
Couple Fe/CuNi
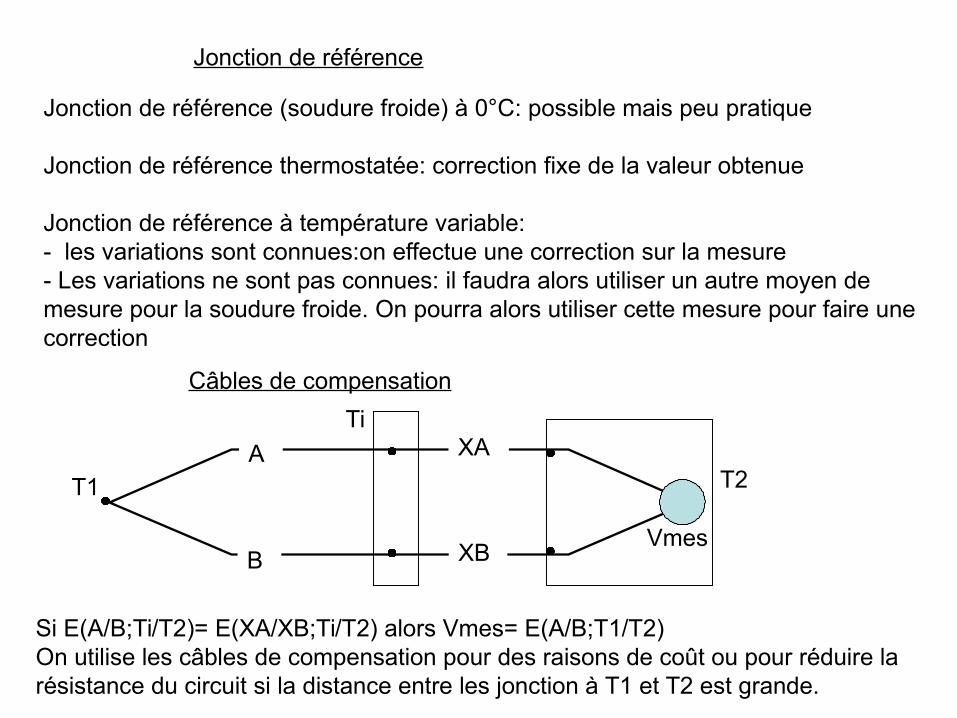
Jonction de référence
Câbles de compensation
Jonction de référence (soudure froide) à 0°C: possible mais peu pratique
Jonction de référence thermostatée: correction fixe de la valeur obtenue
Jonction de référence à température variable: - les variations sont connues:on effectue une correction sur la mesure- Les variations ne sont pas connues: il faudra alors utiliser un autre moyen de mesure pour la soudure froide. On pourra alors utiliser cette mesure pour faire une correction
T1 T2A
B
XA
XB
Ti
Si E(A/B;Ti/T2)= E(XA/XB;Ti/T2) alors Vmes= E(A/B;T1/T2)On utilise les câbles de compensation pour des raisons de coût ou pour réduire la résistance du circuit si la distance entre les jonction à T1 et T2 est grande.
Vmes
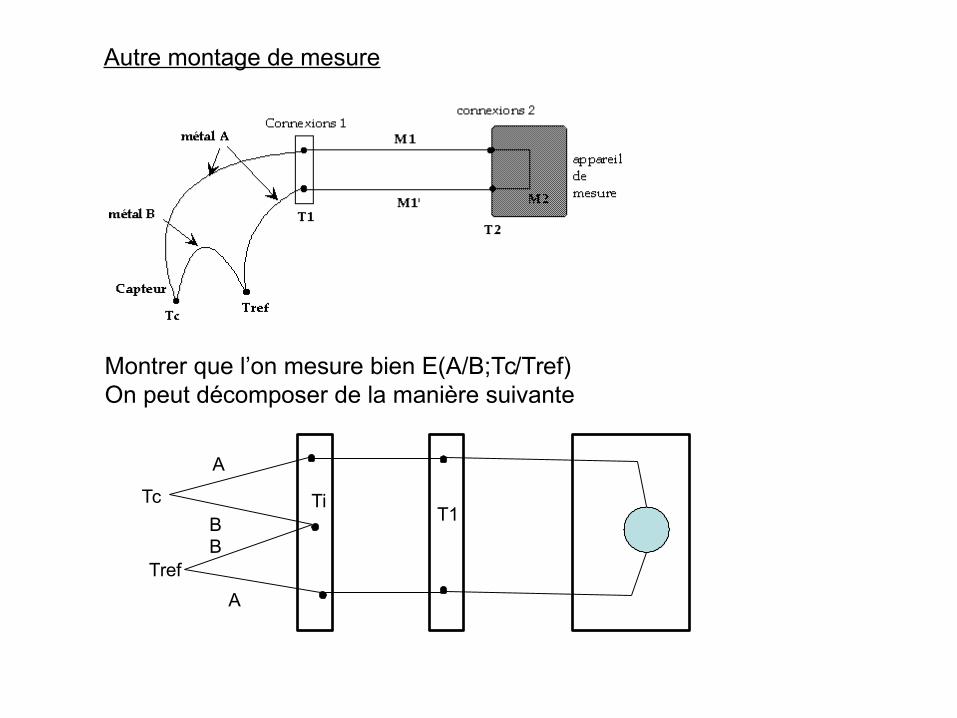
Autre montage de mesure
Montrer que l’on mesure bien E(A/B;Tc/Tref)On peut décomposer de la manière suivante
Tc
Tref
A
A
BB
T1Ti
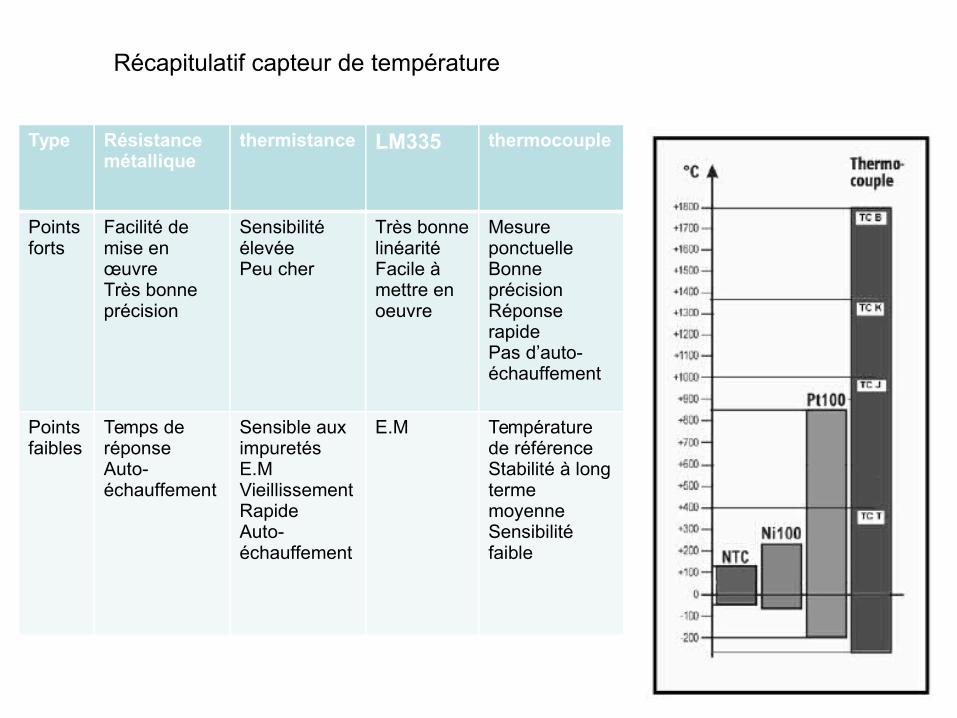
Type Résistancemétallique
thermistance LM335 thermocouple
Points forts
Facilité de mise en œuvre Très bonne précision
Sensibilité élevéePeu cher
Très bonne linéaritéFacile à mettre en oeuvre
Mesure ponctuelleBonne précisionRéponse rapidePas d’auto-échauffement
Points faibles
Temps de réponseAuto-échauffement
Sensible aux impuretésE.MVieillissement RapideAuto-échauffement
E.M Température de référenceStabilité à long terme moyenneSensibilité faible
Récapitulatif capteur de température
Chapitre: conditionnement du signal
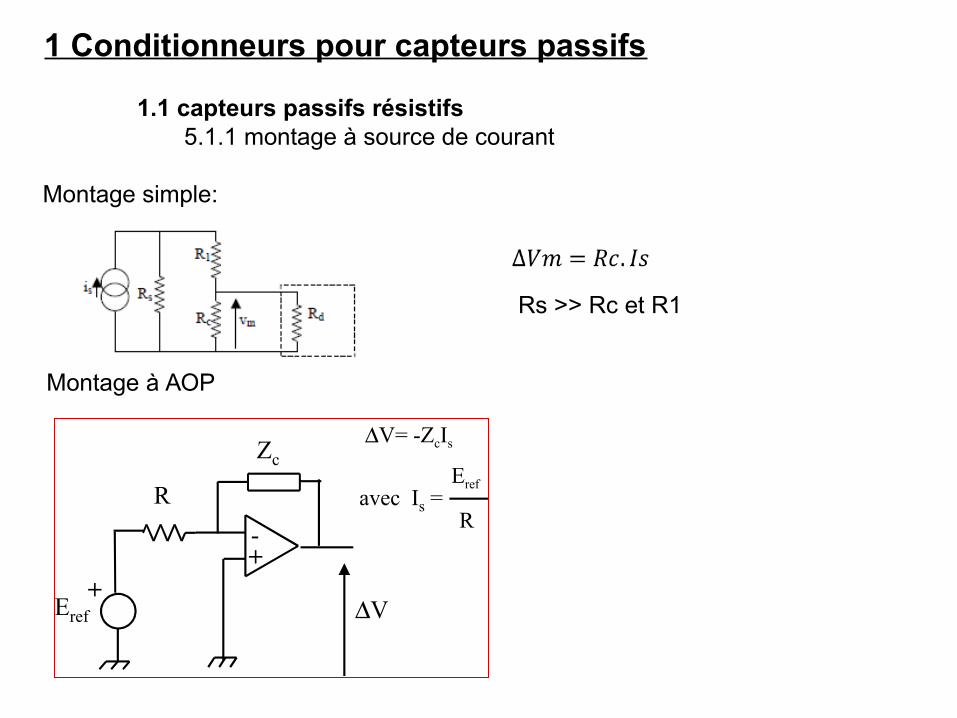
1 Conditionneurs pour capteurs passifs
V
R
Zc
+-
Eref
+
V= -ZcIs
avec Is = Eref
R
1.1 capteurs passifs résistifs5.1.1 montage à source de courant
Montage simple:
Rs >> Rc et R1
Montage à AOP
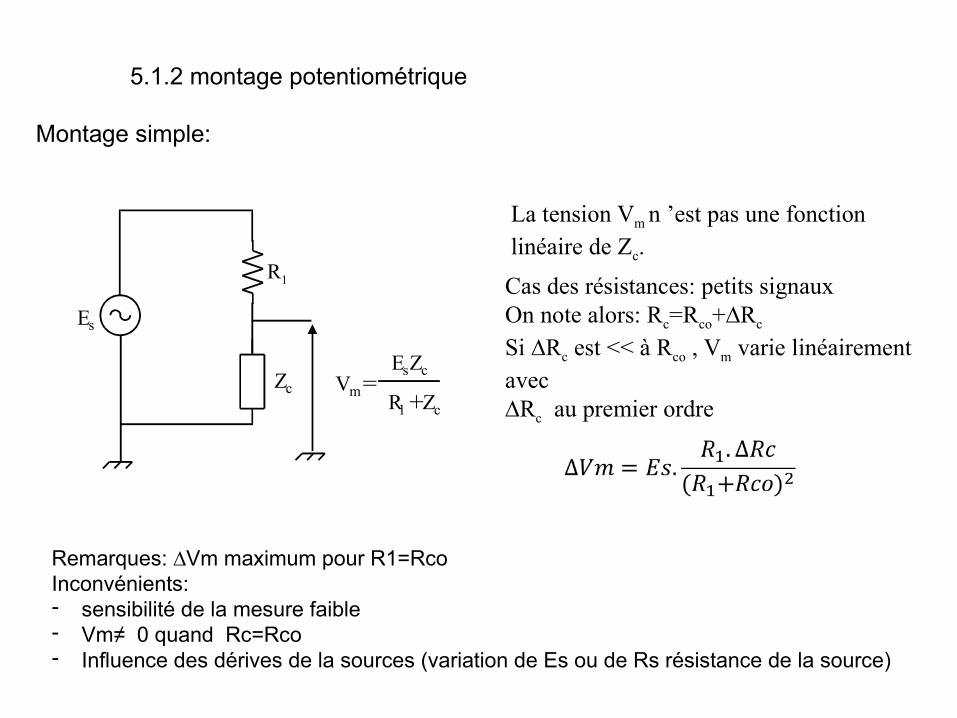
5.1.2 montage potentiométrique
Montage simple:
La tension Vm n ’est pas une fonction linéaire de Zc.
Cas des résistances: petits signauxOn note alors: Rc=Rco+∆Rc
Si ∆Rc est << à Rco , Vm varie linéairement avec∆Rc au premier ordre
Remarques: ∆Vm maximum pour R1=RcoInconvénients: - sensibilité de la mesure faible- Vm≠ 0 quand Rc=Rco- Influence des dérives de la sources (variation de Es ou de Rs résistance de la source)
Es
R1
Zc Vm=EsZc
R1 +Zc
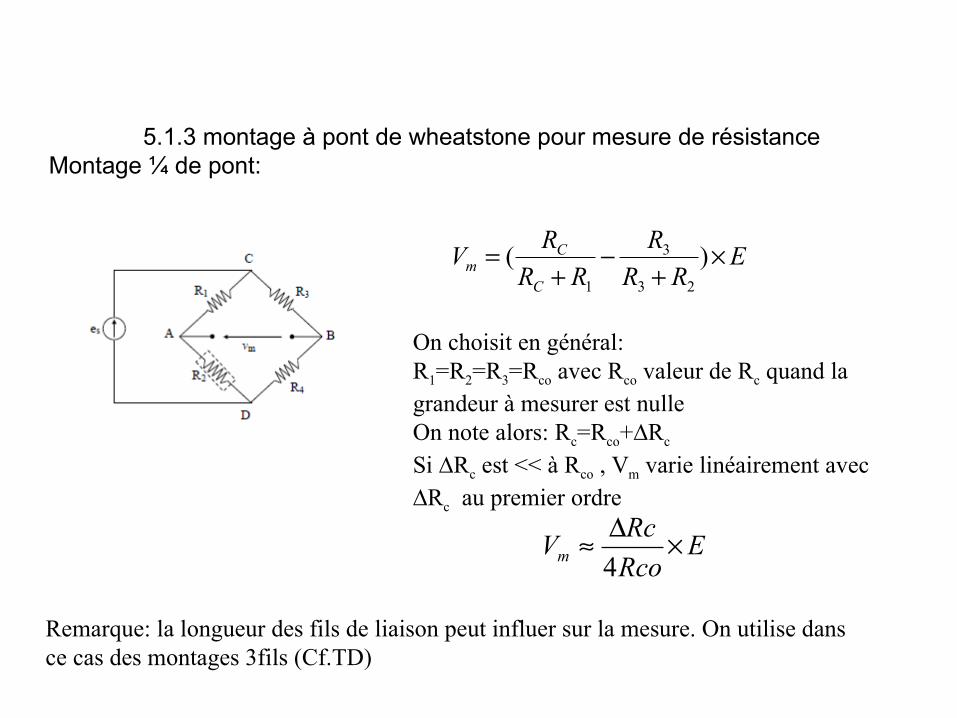
5.1.3 montage à pont de wheatstone pour mesure de résistanceMontage ¼ de pont:
ERR
R
RR
RV
C
Cm
)(
23
3
1
On choisit en général:R1=R2=R3=Rco avec Rco valeur de Rc quand la grandeur à mesurer est nulleOn note alors: Rc=Rco+∆Rc
Si ∆Rc est << à Rco , Vm varie linéairement avec∆Rc au premier ordre
ERco
RcVm
4
Remarque: la longueur des fils de liaison peut influer sur la mesure. On utilise dans ce cas des montages 3fils (Cf.TD)
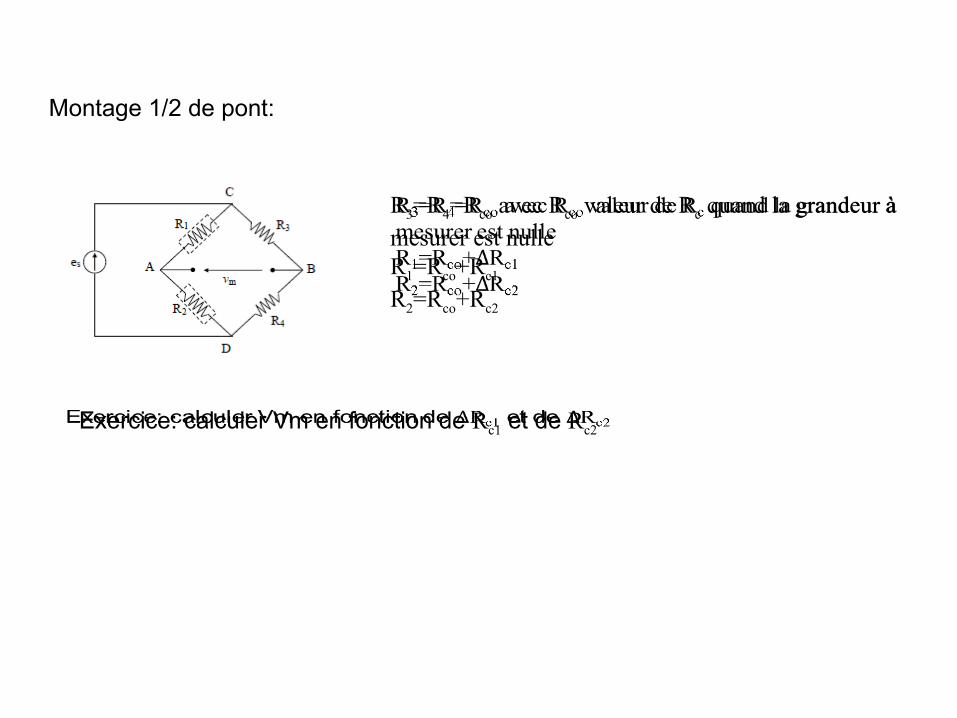
Montage 1/2 de pont:
R3=R4=Rco avec Rco valeur de Rc quand la grandeur à mesurer est nulleR1=Rco+Rc1
R2=Rco+Rc2
Exercice: calculer Vm en fonction de Rc1 et de Rc2
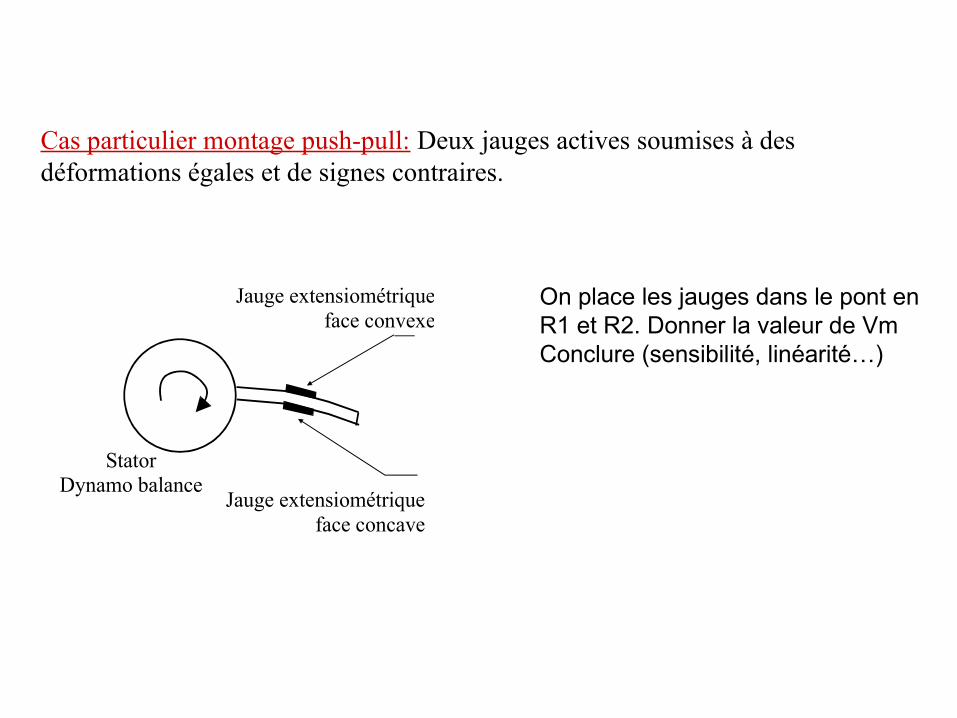
StatorDynamo balance
Jauge extensiométriqueface convexe
Jauge extensiométriqueface concave
Cas particulier montage push-pull: Deux jauges actives soumises à des déformations égales et de signes contraires.
On place les jauges dans le pont en R1 et R2. Donner la valeur de Vm Conclure (sensibilité, linéarité…)
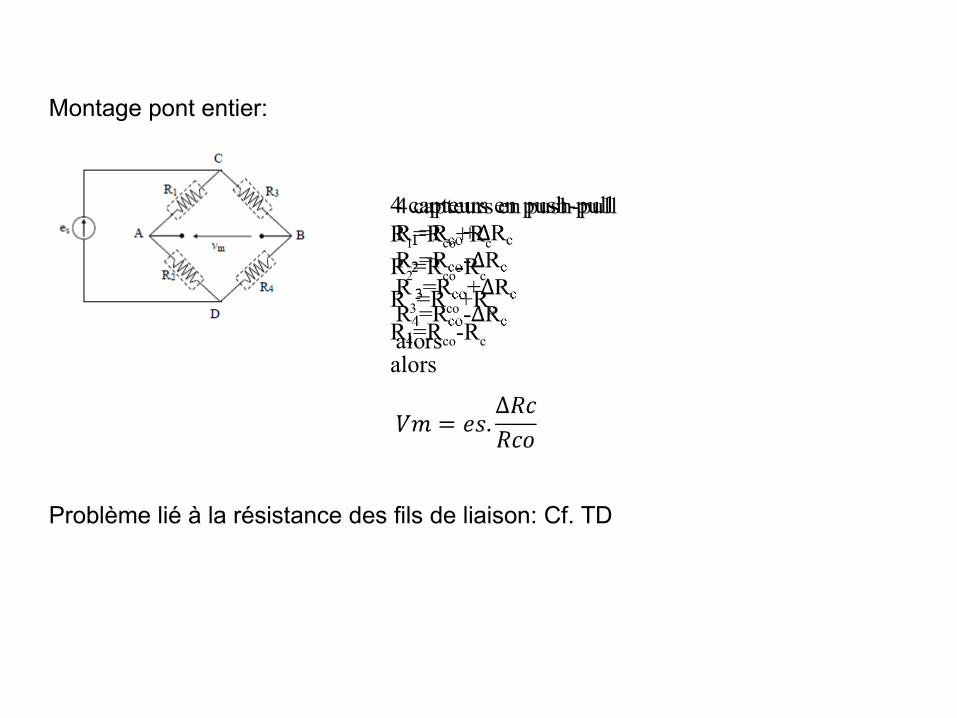
Montage pont entier:
4 capteurs en push-pullR1=Rco+Rc
R2=Rco-Rc R 3=Rco+Rc
R4=Rco-Rc
alors
Problème lié à la résistance des fils de liaison: Cf. TD
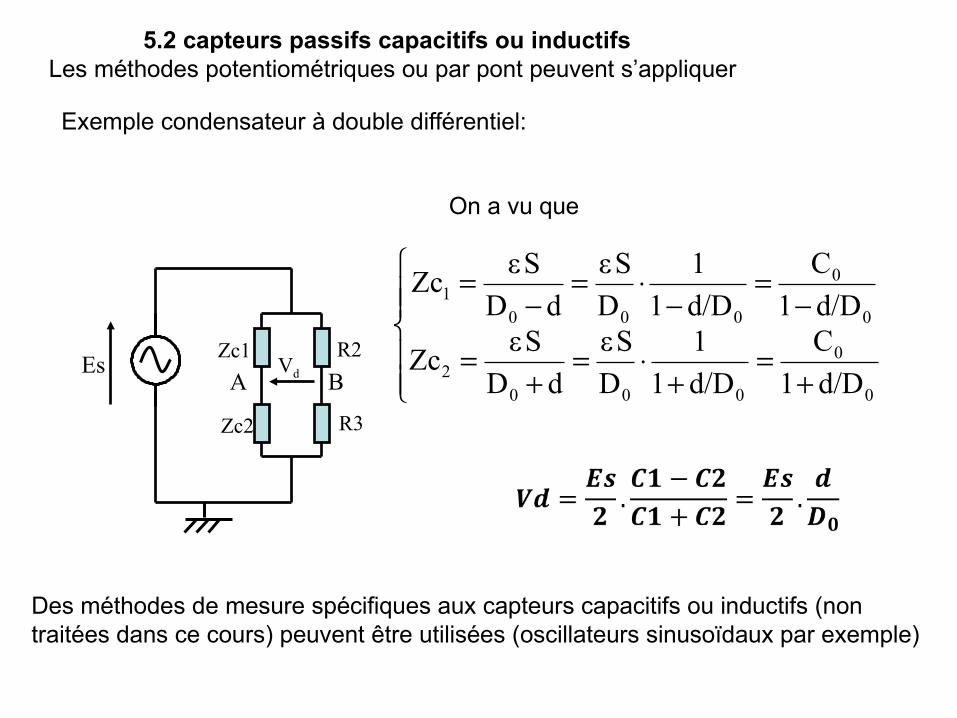
5.2 capteurs passifs capacitifs ou inductifsLes méthodes potentiométriques ou par pont peuvent s’appliquer
Exemple condensateur à double différentiel:
Zc2
Zc1 R2
R3
Es VdA B
0
0
0002
0
0
0001
d/D1
C
d/D1
1
D
Sε
dD
SεZc
d/D1
C
d/D1
1
D
Sε
dD
SεZc
On a vu que
Des méthodes de mesure spécifiques aux capteurs capacitifs ou inductifs (non traitées dans ce cours) peuvent être utilisées (oscillateurs sinusoïdaux par exemple)
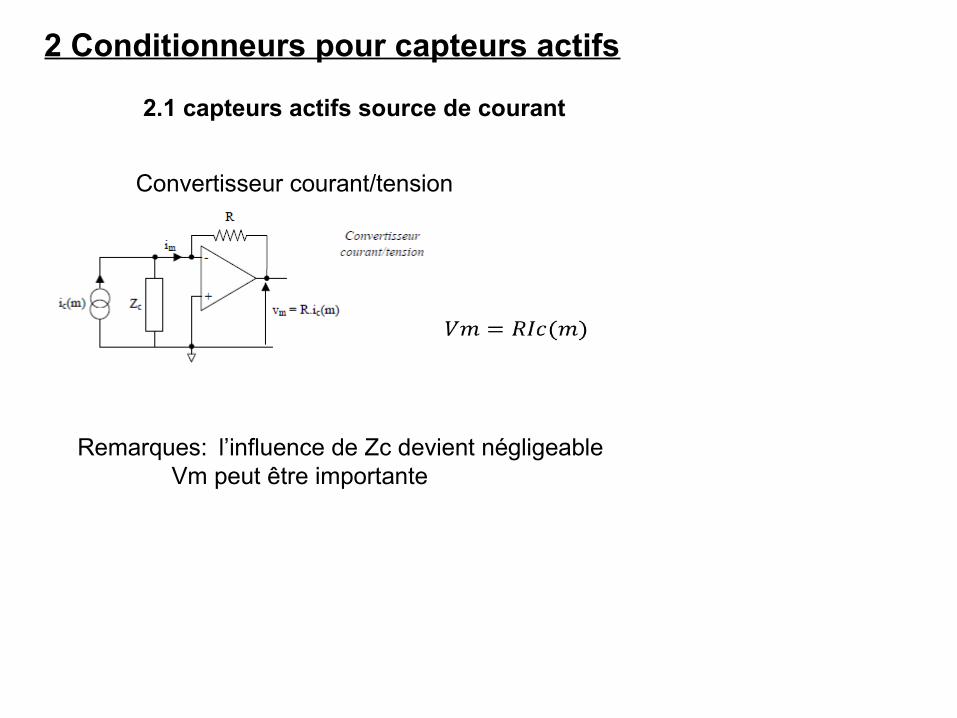
2 Conditionneurs pour capteurs actifs
2.1 capteurs actifs source de courant
Convertisseur courant/tension
Remarques: l’influence de Zc devient négligeableVm peut être importante
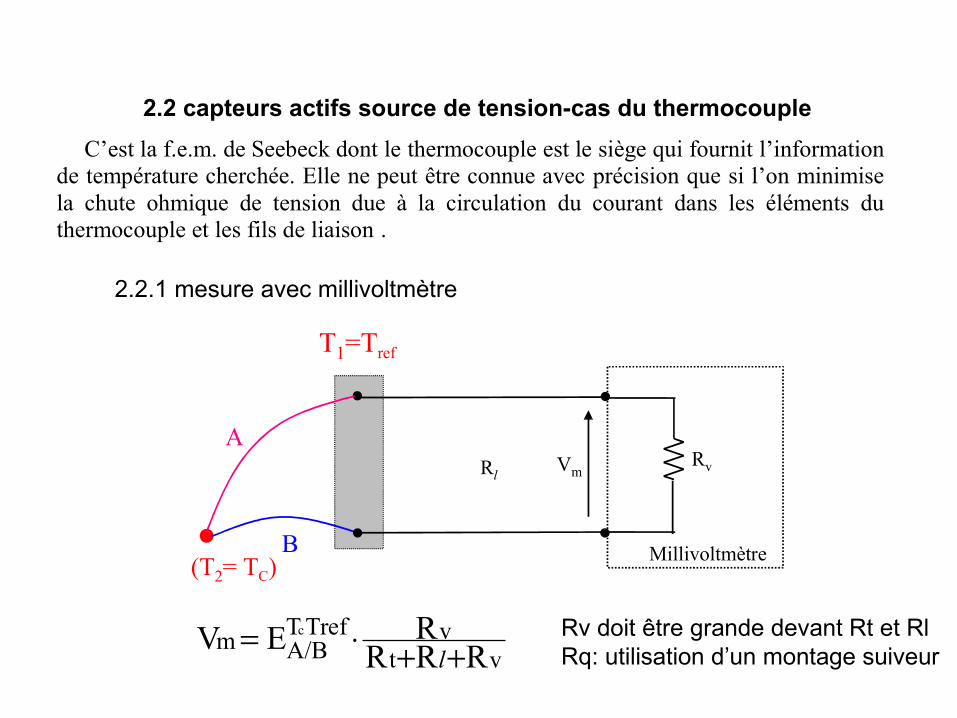
2.2 capteurs actifs source de tension-cas du thermocouple
C’est la f.e.m. de Seebeck dont le thermocouple est le siège qui fournit l’informationde température cherchée. Elle ne peut être connue avec précision que si l’on minimisela chute ohmique de tension due à la circulation du courant dans les éléments duthermocouple et les fils de liaison .
T1=Tref
(T2= TC)
A
B
Rl VmRv
Millivoltmètre
2.2.1 mesure avec millivoltmètre
vtvTrefT
A/BmRRR
REV c
l
Rv doit être grande devant Rt et RlRq: utilisation d’un montage suiveur
Tref
(TC)
A
B
RtRe
G+
-
EA/B
Tc, Tref
I
I
+E
Rh
mA
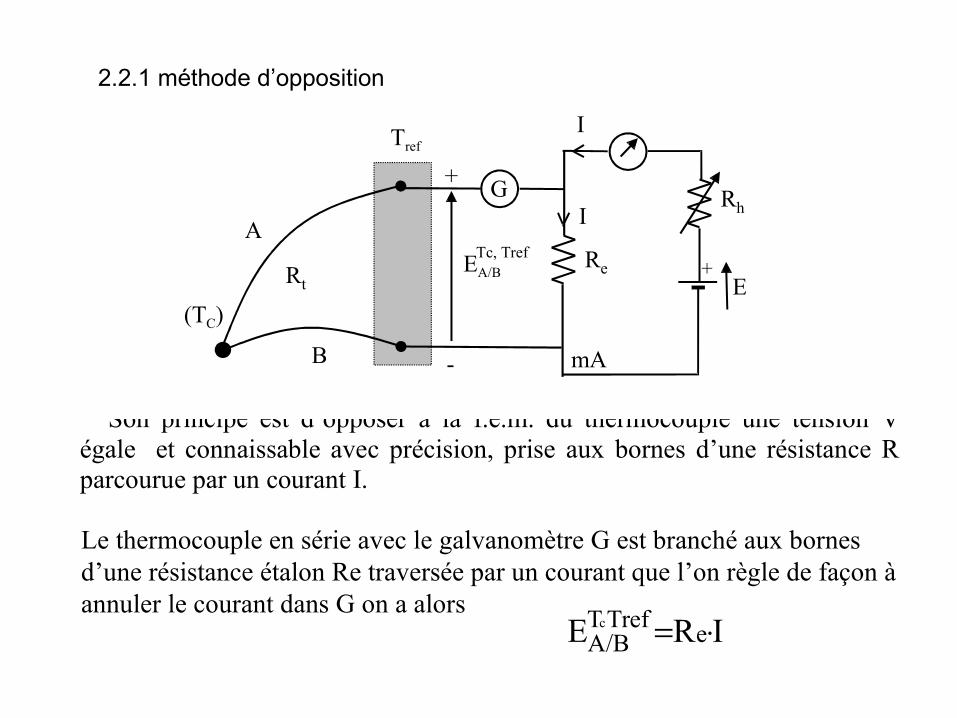
2.2.1 méthode d’opposition
Son principe est d’opposer à la f.e.m. du thermocouple une tension Végale et connaissable avec précision, prise aux bornes d’une résistance Rparcourue par un courant I.
IRE eTrefT
A/Bc
Le thermocouple en série avec le galvanomètre G est branché aux bornes d’une résistance étalon Re traversée par un courant que l’on règle de façon à annuler le courant dans G on a alors
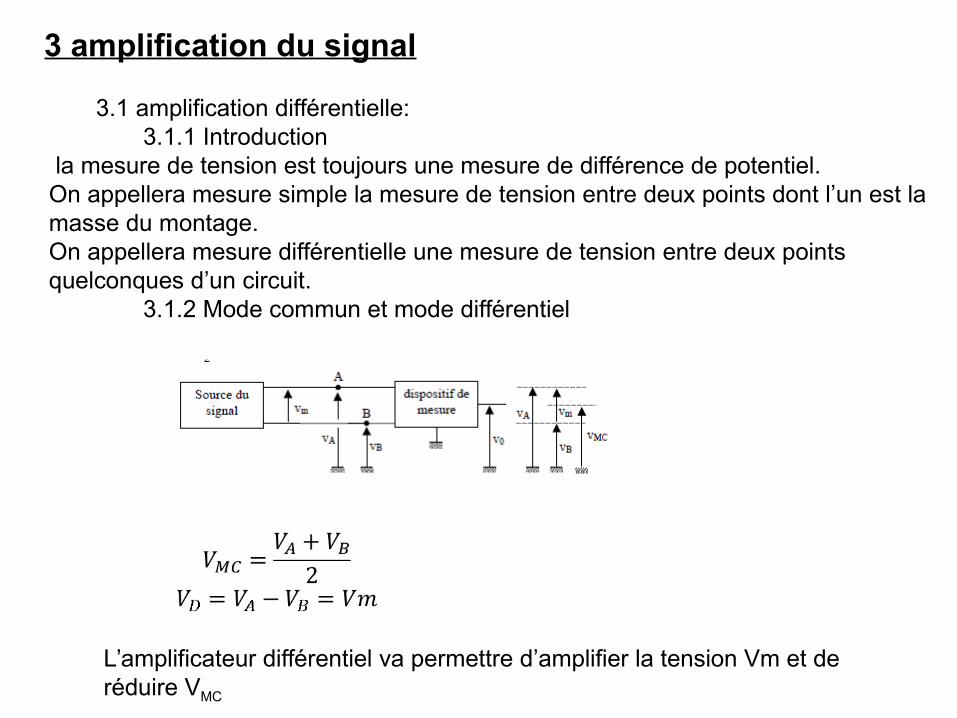
3.1 amplification différentielle:3.1.1 Introduction
la mesure de tension est toujours une mesure de différence de potentiel.On appellera mesure simple la mesure de tension entre deux points dont l’un est la masse du montage.On appellera mesure différentielle une mesure de tension entre deux points quelconques d’un circuit.
3.1.2 Mode commun et mode différentiel
3 amplification du signal
L’amplificateur différentiel va permettre d’amplifier la tension Vm et de réduire VMC
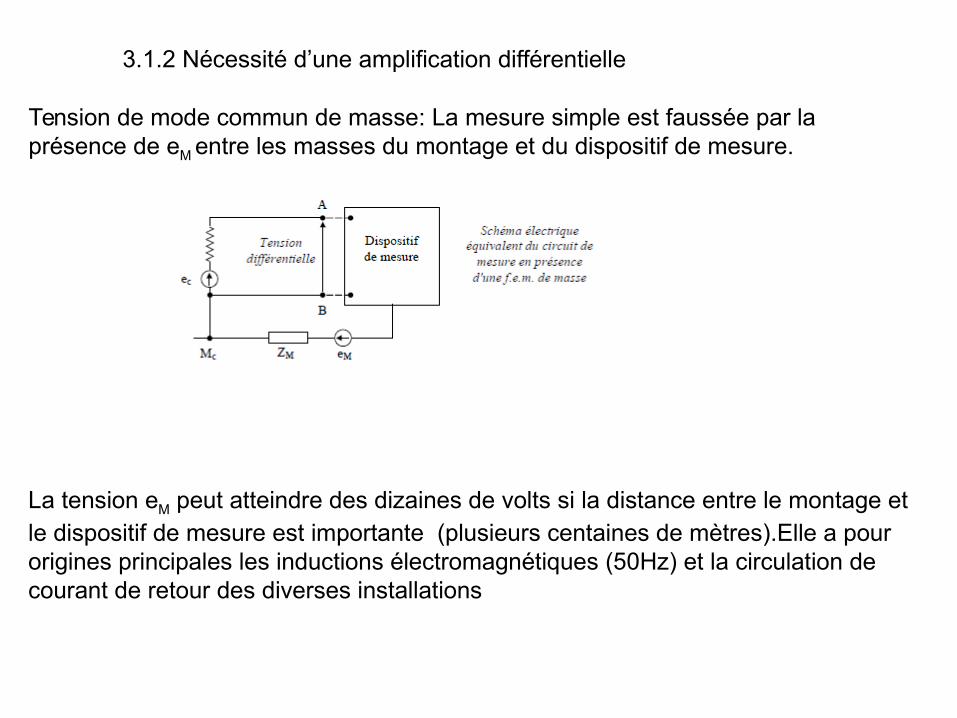
3.1.2 Nécessité d’une amplification différentielle
Tension de mode commun de masse: La mesure simple est faussée par la présence de eM entre les masses du montage et du dispositif de mesure.
La tension eM peut atteindre des dizaines de volts si la distance entre le montage et le dispositif de mesure est importante (plusieurs centaines de mètres).Elle a pour origines principales les inductions électromagnétiques (50Hz) et la circulation de courant de retour des diverses installations
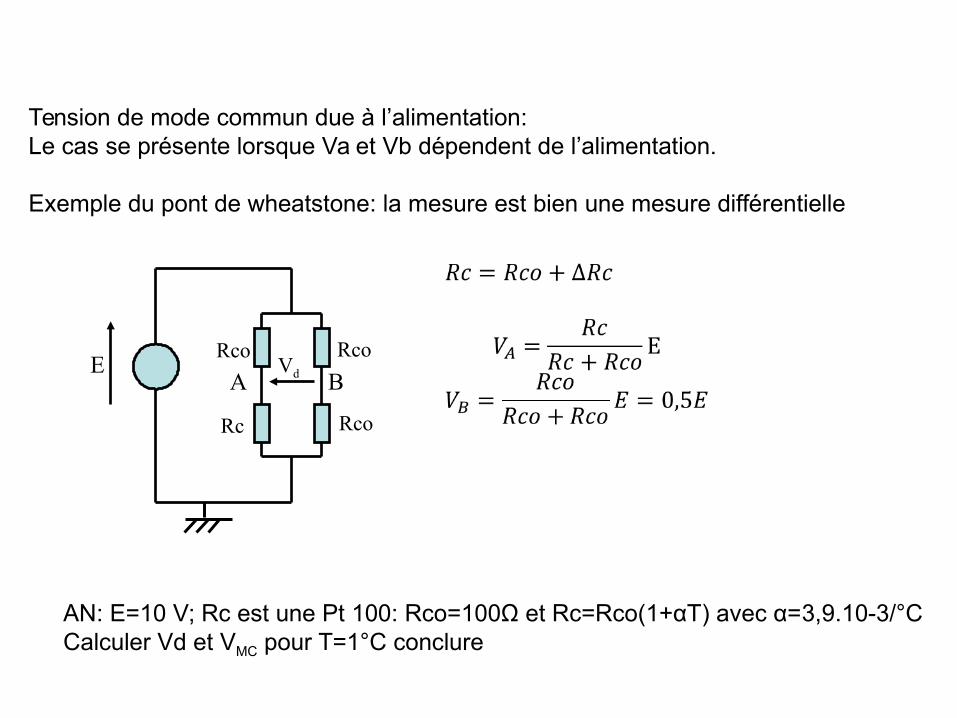
Tension de mode commun due à l’alimentation:Le cas se présente lorsque Va et Vb dépendent de l’alimentation.
Exemple du pont de wheatstone: la mesure est bien une mesure différentielle
Rc
Rco Rco
Rco
E VdA B
AN: E=10 V; Rc est une Pt 100: Rco=100Ω et Rc=Rco(1+αT) avec α=3,9.10-3/°C Calculer Vd et VMC pour T=1°C conclure
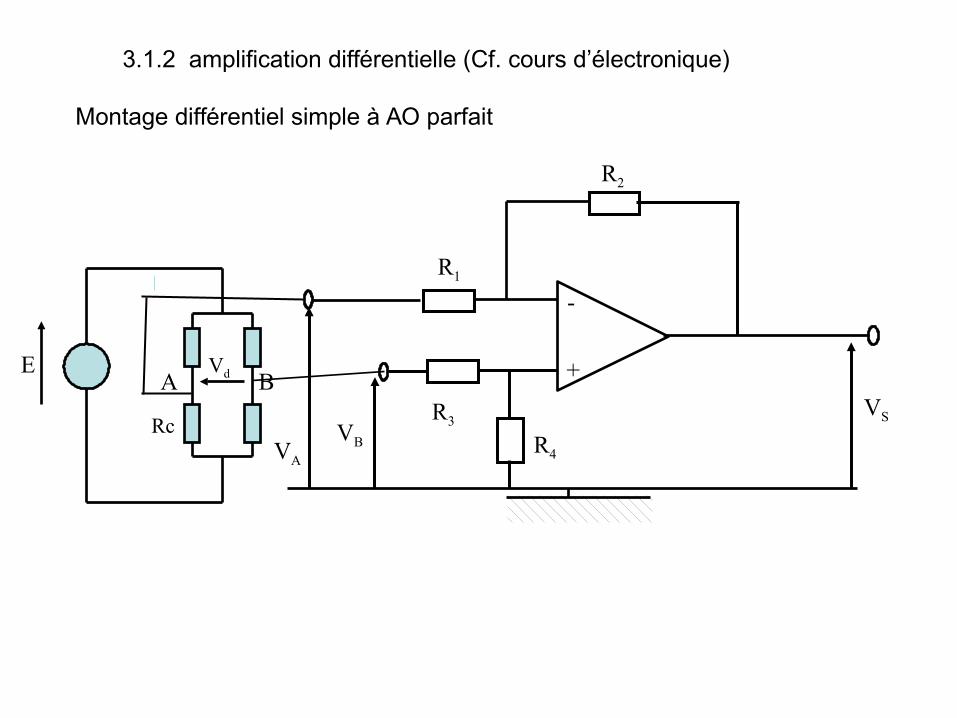
3.1.2 amplification différentielle (Cf. cours d’électronique)
Montage différentiel simple à AO parfait
R2
R3
R4
R1
-
+
VA
VB
VSRc
E VdA B
Si R1 = R3 et R2 = R4 on a Vs =(VA-VB) (R4/R3)=G (VA-VB) Si les résistances ne sont pas égales (même si l’AO est parfait) on va amplifier aussi VMC. Le facteur d’amplification de VMC ,GMC ,sera faible mais VMC peut être grand devant Vd=VA-VB donc en sortie on peut retrouver une partie de la tension de mode commun.On définit le Taux de Réjection de Mode Commun comme étant:TRMC=20*log G/Gǀ MCǀ
Avantages: Coût faible et réalisation facile
Inconvénients:Nécessité d’apparier les résistances pour obtenir un bon TRMC
AN: Vd=2mV,VMC=5V, TRMC=88dB et G=1000 (valeurs obtenues pour un AO parfait et des résistances à 1%), calculer l’erreur sur Vs due à VMC
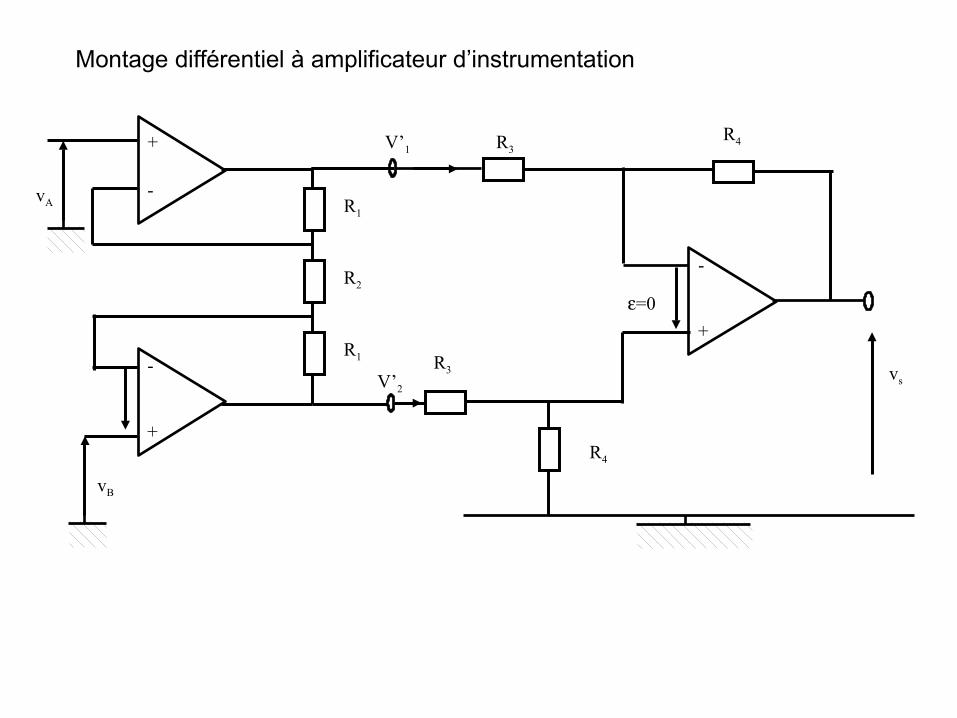
Montage différentiel à amplificateur d’instrumentation
vs
R4
R3
R4
R3
-
+
=0
-
+
-
+
R1
R2
R1
vB
V’1
V’2
vA
) v v( RR 2R *R
R v 122
21
3
4s
Avantages de l’amplificateur d’instrumentation- gain précis et stable réglé avec une seule résistance extérieure R2
(et plus avec un rapport de résistance plus difficile à obtenir), R3 et R4 sont fixes- impédance d’entrée très importante (de l’ordre de 1010 Ω)- TRMC généralement > à 100
Inconvénients:- coût élevé du composant qui parfois ne se justifie pas
AN: Vd=2mV,VMC=5V, TRMC=100dB et G=1000 , calculer l’erreur sur Vs due à VMC
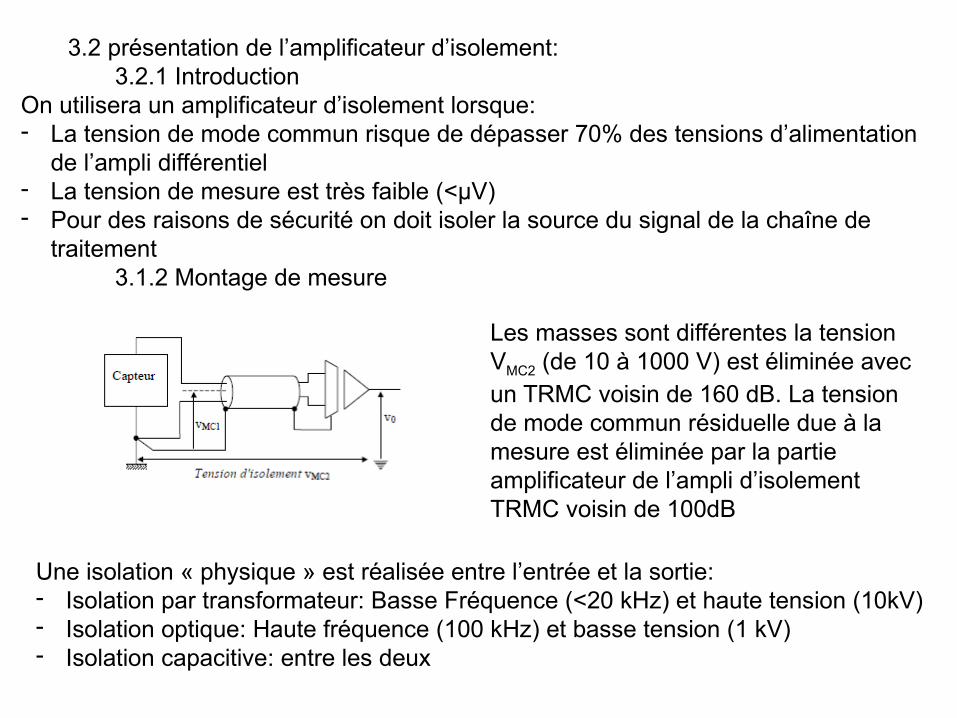
3.2 présentation de l’amplificateur d’isolement:3.2.1 Introduction
On utilisera un amplificateur d’isolement lorsque:- La tension de mode commun risque de dépasser 70% des tensions d’alimentation
de l’ampli différentiel - La tension de mesure est très faible (<µV)- Pour des raisons de sécurité on doit isoler la source du signal de la chaîne de
traitement3.1.2 Montage de mesure
Une isolation « physique » est réalisée entre l’entrée et la sortie:- Isolation par transformateur: Basse Fréquence (<20 kHz) et haute tension (10kV)- Isolation optique: Haute fréquence (100 kHz) et basse tension (1 kV)- Isolation capacitive: entre les deux
Les masses sont différentes la tension VMC2 (de 10 à 1000 V) est éliminée avec un TRMC voisin de 160 dB. La tension de mode commun résiduelle due à la mesure est éliminée par la partie amplificateur de l’ampli d’isolement TRMC voisin de 100dB
1- Introduction
Les signaux issus de capteur sont la plupart du temps utilisés dans un système de traitement numérique (microprocesseurs, microcontrôleur, API….). Ce système de traitement permet non seulement d’obtenir la valeur du mesurande mais également son exploitation (action sur les différents actionneurs, stockage en fonction du temps par exemple)
Certains capteurs donnent directement des valeurs exploitables par un système numérique (capteurs digitaux, capteurs TOR), d’autres nécessitent l’emploi d’un convertisseur analogique-numérique.
Ce chapitre abordera également de manière succinte un point important de la chaîne de mesure la transmission des données.
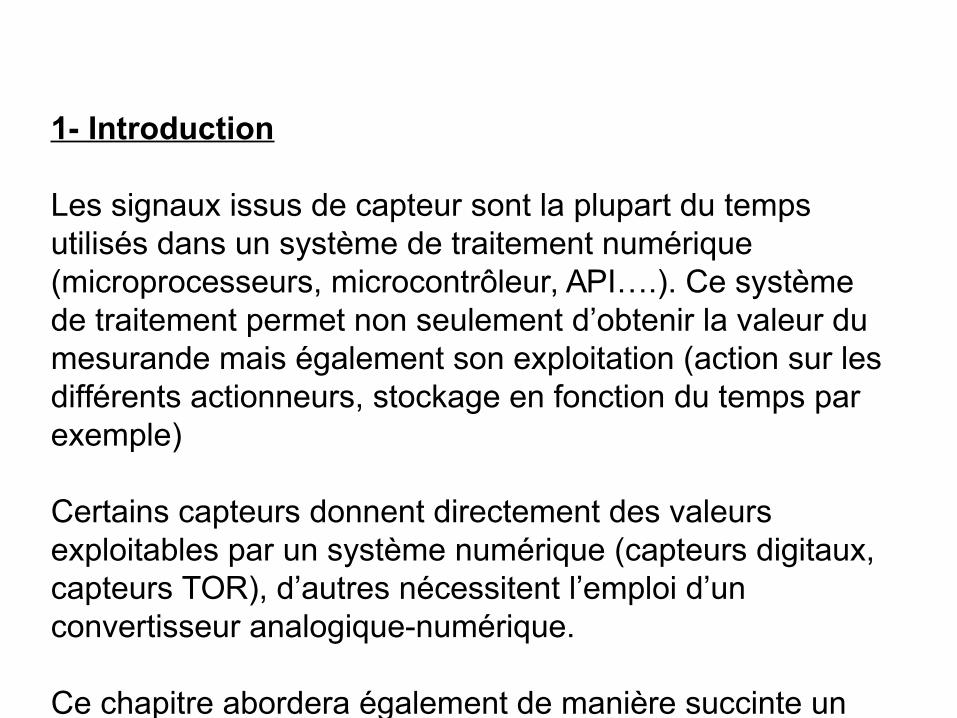
2- transmission analogique
Liaison 4-20 mA: cette liaison est amenée à disparaître au profit de la liaison numérique mais elle est encore très employée.L’amplitude du courant est proportionnelle à la tension à mesurer. La conversion analogique numérique se fait du côté contrôle commande
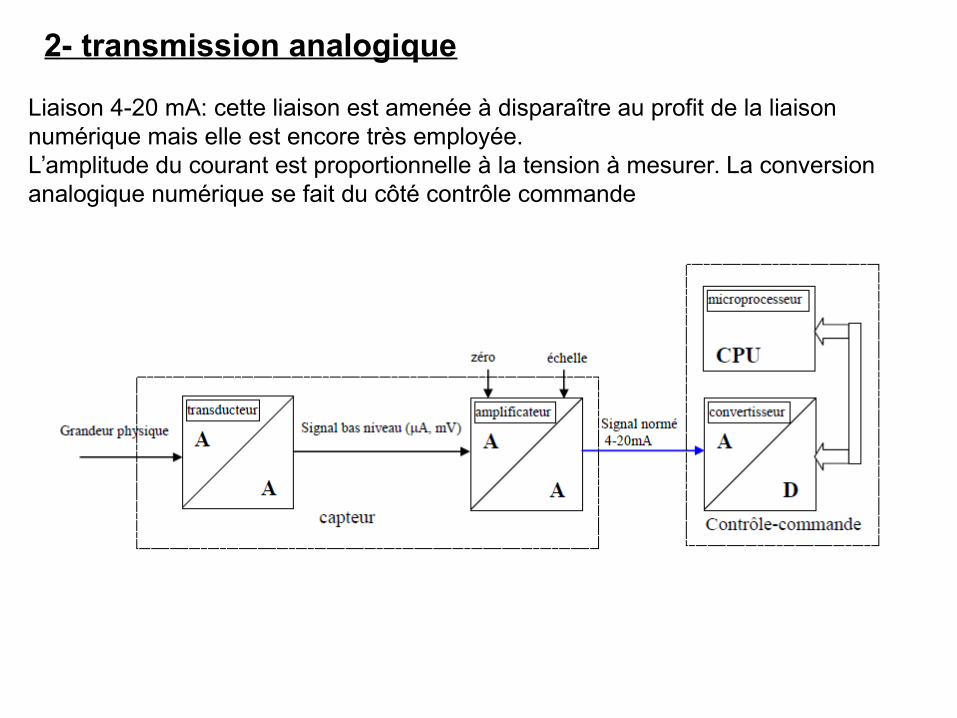
Une boucle 4-20 ma comporte au minimum 4 éléments: l’émetteur, l’alimentation de la boucle, les fils, et le récepteur.L’émetteur convertit la valeur mesurée par le capteur en un courant: 4mA pour le bas de l’EM et 20 mA pour la dernière mesure du capteur
Avantages : - transmission sur grandes longueur (1km) indépendantes de la longueur de la ligne
- Bonne immunité aux bruits- Détection de panne intégré
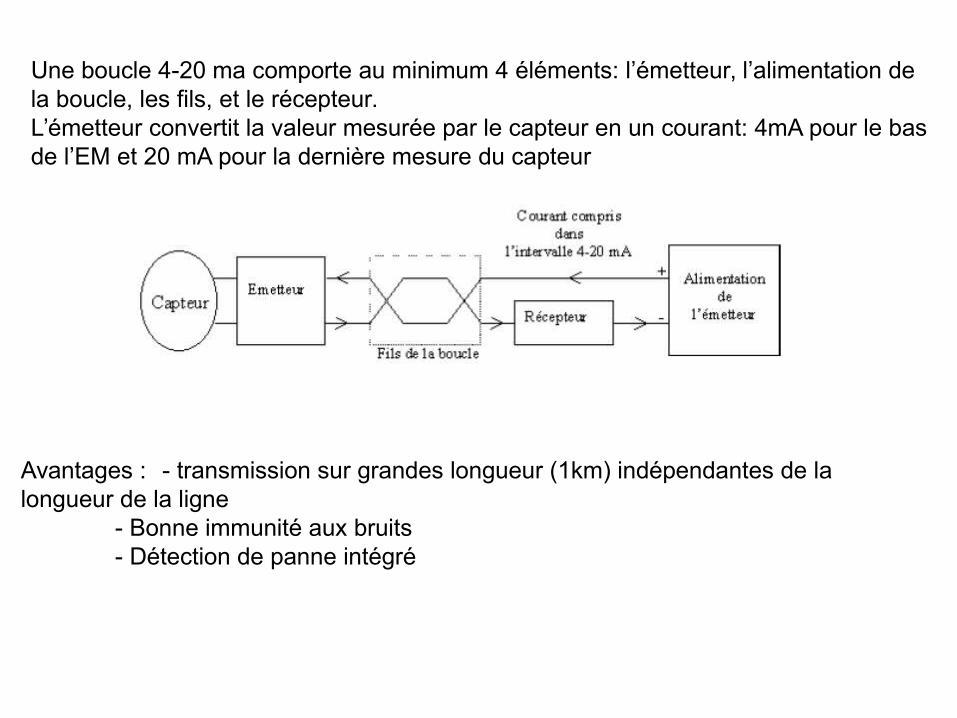
3- transmission numérique
La conversion analogique est effectué en sortie du capteur. La transmission du signal s’effectue alors de plus en plus soit par des réseaux locaux dédiés à l’instrumentation soit par le réseau intranet de l’entreprise grâce au protocole TCP/IP (sur des distances importantes) ou alors via une connexion USB (surveillance du fonctionnement du capteur ou mesure à courte distance).
Avantages : - on peut transmettre des informations non transmissibles de manière analogique (nom du capteur, zone où ce capteur est installé, type de panne…)
- flexibilité de raccordement et d’extension des mesures- réduction des câbles et des coûts- correction des grandeurs d’influence- réduction des dérives dues aux composants analogiques…
Ve Vs
N bitsde sortie
M bitsd'entrée
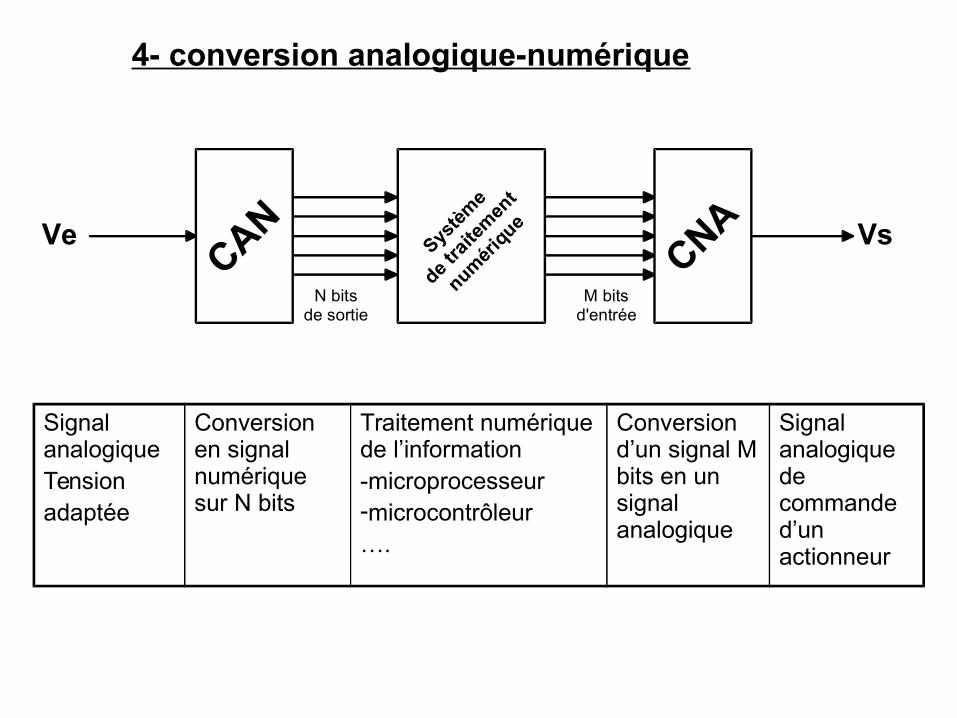
4- conversion analogique-numérique
Signal analogiqueTensionadaptée
Conversion en signal numérique sur N bits
Traitement numérique de l’information-microprocesseur-microcontrôleur….
Conversion d’un signal M bits en un signal analogique
Signal analogique de commande d’un actionneur
N (Bits)
Ve (V)
Caractéristique théorique idéale
Caractéristique théorique réelle
Quantum
Valeur pleine échelle
0 1 2 3 4 5 6 7
001
010
011
100
101
110
111
0008
2
ValeurValeur
2
échellePleineValeurq
bitsdenombre
minMAXbitsdenombre
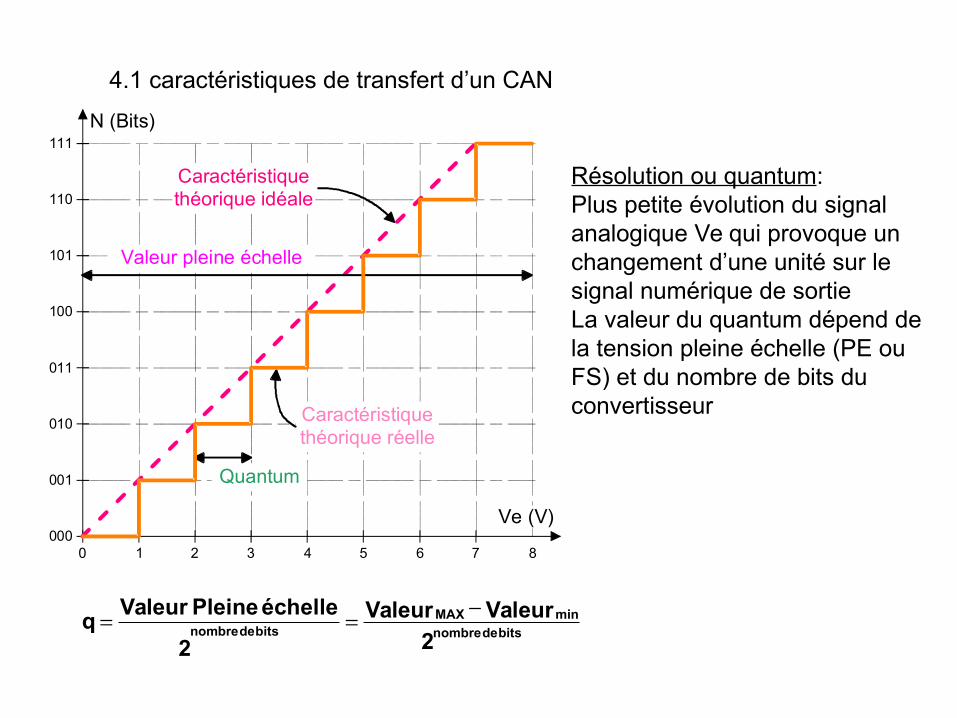
4.1 caractéristiques de transfert d’un CAN
Résolution ou quantum:Plus petite évolution du signal analogique Ve qui provoque un changement d’une unité sur le signal numérique de sortieLa valeur du quantum dépend de la tension pleine échelle (PE ou FS) et du nombre de bits du convertisseur
-4 -3 -2 -1 0 1 2 3
N (Bits)
4
Ve (V)
001
010
011
100
101
110
111
000
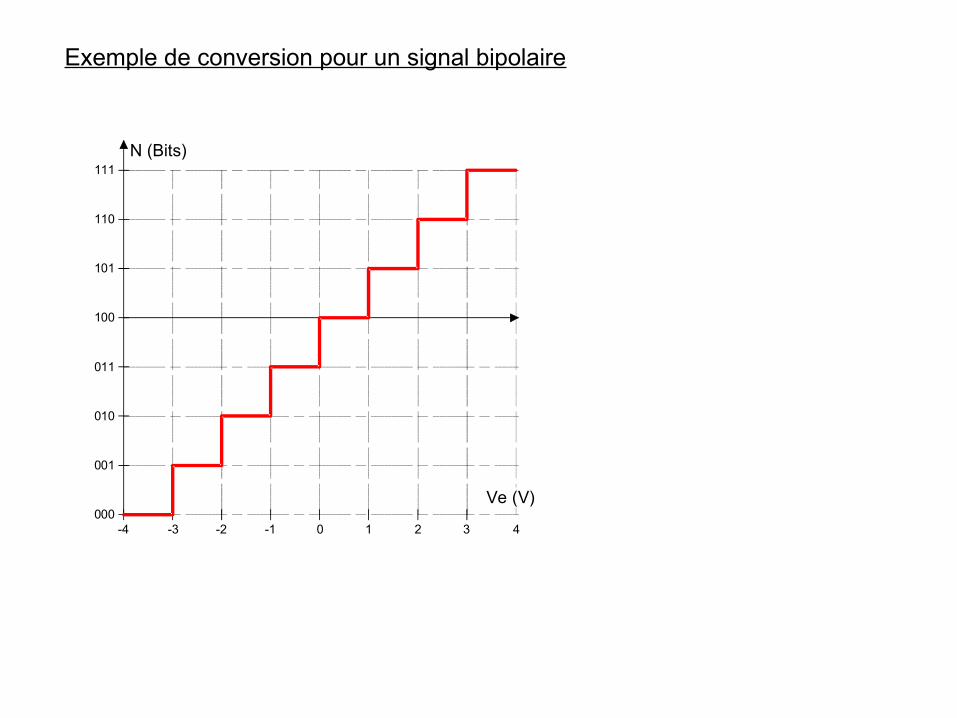
Exemple de conversion pour un signal bipolaire
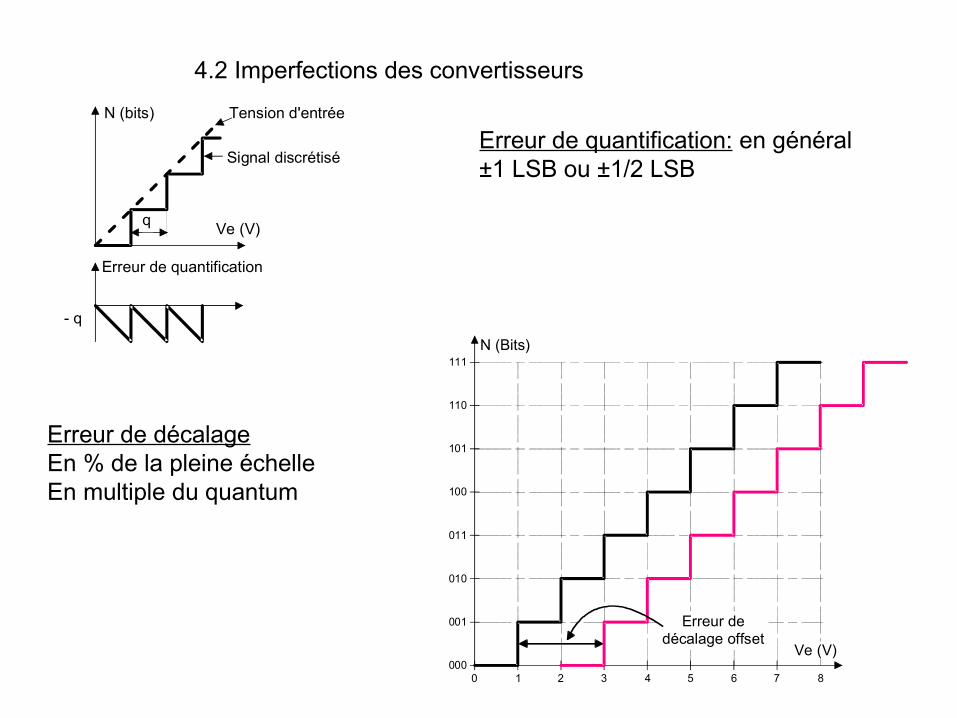
4.2 Imperfections des convertisseurs
Tension d'entrée
Signal discrétisé
Ve (V)
N (bits)
Erreur de quantification
q
- q
0 1 2 3 4 5 6 7
N (Bits)
001
010
011
100
101
110
111
0008
Ve (V)
Erreur de décalage offset
Erreur de quantification: en général±1 LSB ou ±1/2 LSB
Erreur de décalageEn % de la pleine échelleEn multiple du quantum
0 1 2 3 4 5 6 7
N (Bits)
001
010
011
100
101
110
111
0008
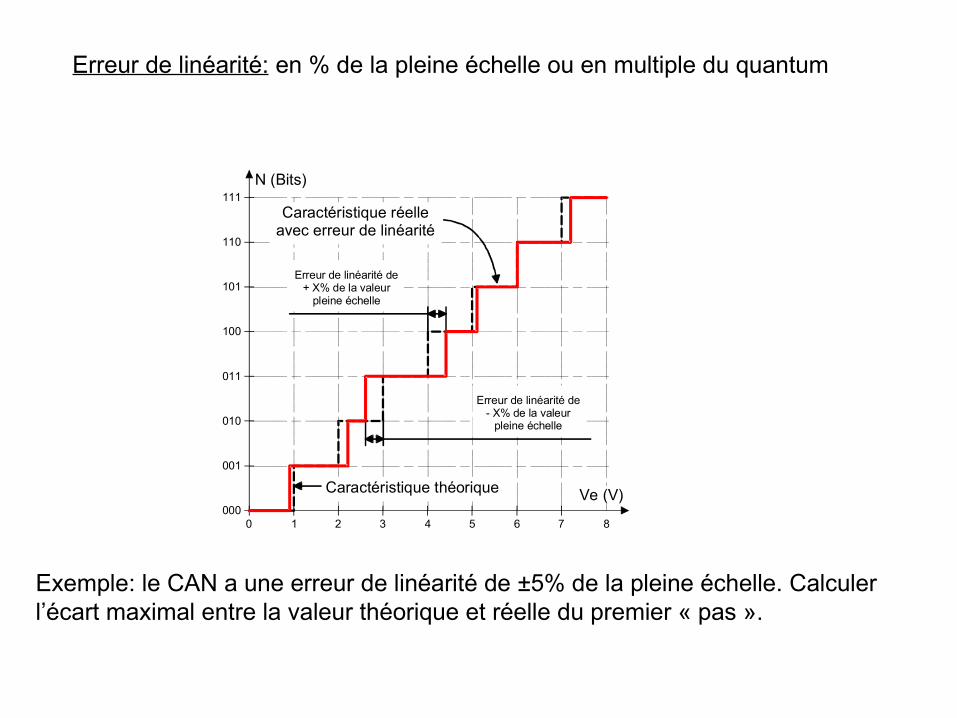
Ve (V)Caractéristique théorique
Caractéristique réelle avec erreur de linéarité
Erreur de linéarité de + X% de la valeur
pleine échelle
Erreur de linéarité de - X% de la valeur
pleine échelle
Erreur de linéarité: en % de la pleine échelle ou en multiple du quantum
Exemple: le CAN a une erreur de linéarité de ±5% de la pleine échelle. Calculer l’écart maximal entre la valeur théorique et réelle du premier « pas ».
0 1 2 3 4 5 6 7
N (Bits)
001
010
011
100
101
110
111
0008
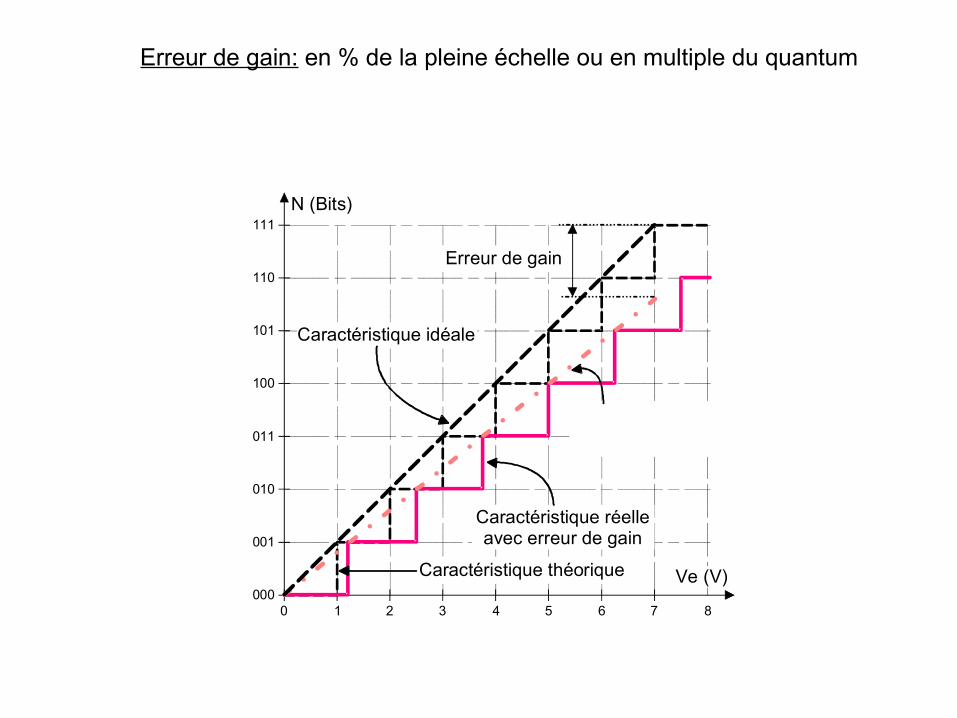
Ve (V)Caractéristique théorique
Caractéristique réelle avec erreur de gain
Erreur de gain
Caractéristique idéale
Caractéristique réelle Idéale
Erreur de gain: en % de la pleine échelle ou en multiple du quantum
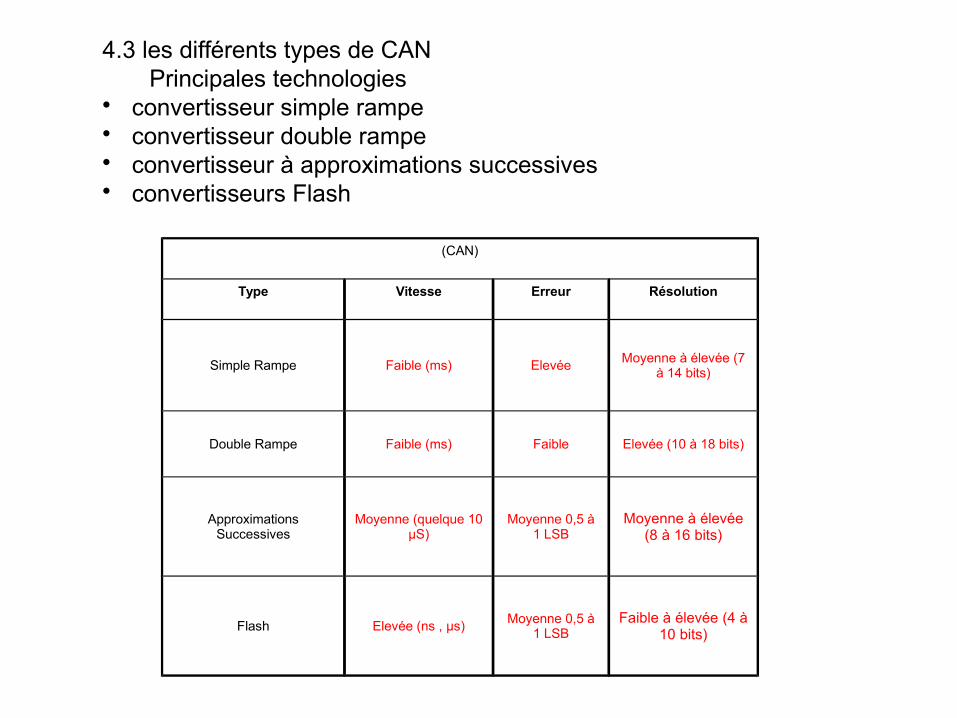
(CAN)
Type Vitesse Erreur Résolution
Simple Rampe Faible (ms) ElevéeMoyenne à élevée (7
à 14 bits)
Double Rampe Faible (ms) Faible Elevée (10 à 18 bits)
Approximations Successives
Moyenne (quelque 10 µS)
Moyenne 0,5 à 1 LSB
Moyenne à élevée (8 à 16 bits)
Flash Elevée (ns , µs)Moyenne 0,5 à
1 LSBFaible à élevée (4 à
10 bits)
4.3 les différents types de CAN Principales technologies• convertisseur simple rampe• convertisseur double rampe• convertisseur à approximations successives• convertisseurs Flash
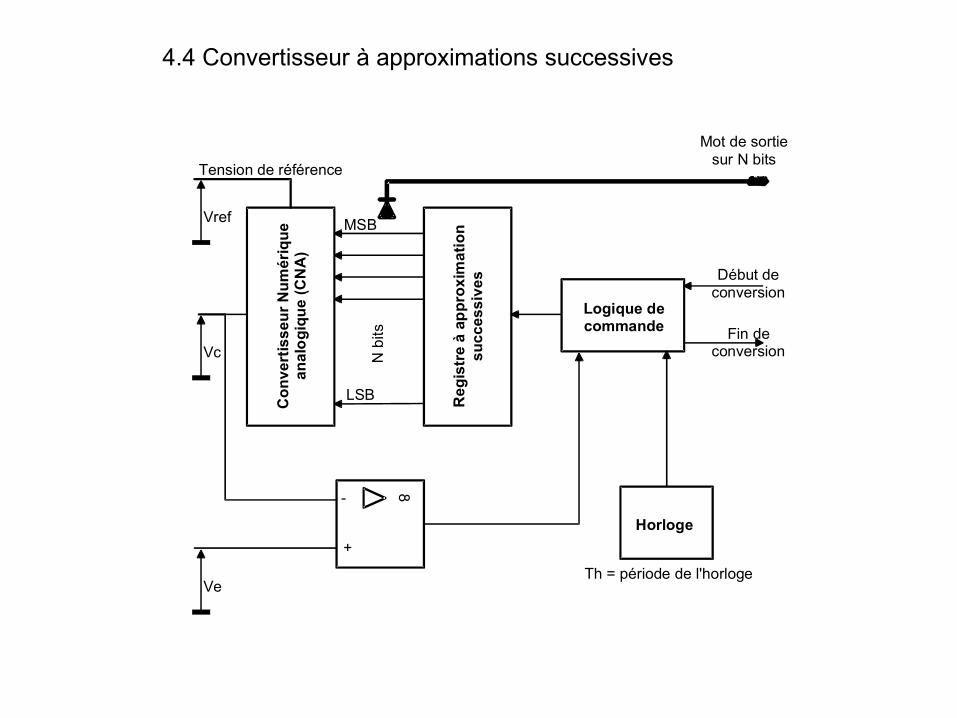
Horloge
Logique de commande
Re
gis
tre
à a
pp
rox
ima
tio
n
su
cc
es
siv
es
Co
nv
ert
iss
eu
r N
um
éri
qu
e
an
alo
giq
ue
(C
NA
)
-
+
MSB
LSBN
bits
8
Vc
Vref
Ve
Tension de référence
Th = période de l'horloge
Début de conversion
Fin de conversion
Mot de sortie sur N bits
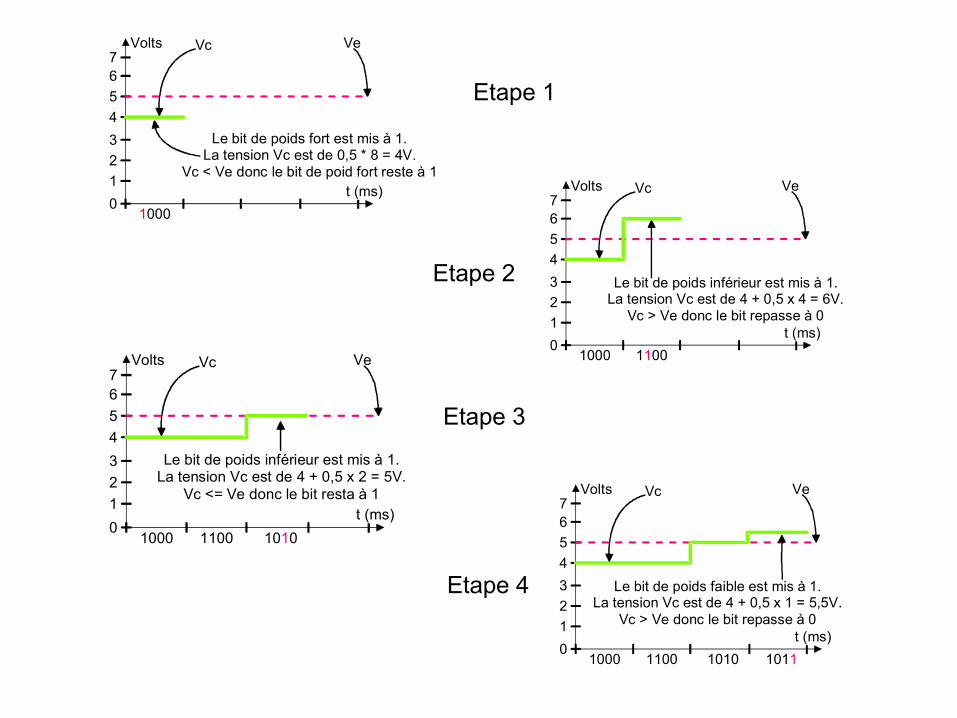
4.4 Convertisseur à approximations successives
t (ms)
Volts
0
1
2
3
4
5
67
Ve
Le bit de poids fort est mis à 1.La tension Vc est de 0,5 * 8 = 4V.
Vc < Ve donc le bit de poid fort reste à 1
1000
Vc
t (ms)
Volts
0
1
2
3
4
5
67
Ve
Le bit de poids inférieur est mis à 1.La tension Vc est de 4 + 0,5 x 4 = 6V.
Vc > Ve donc le bit repasse à 0
1000 1100
Vc
t (ms)
Volts
0
1
2
3
4
5
67
Ve
Le bit de poids inférieur est mis à 1.La tension Vc est de 4 + 0,5 x 2 = 5V.
Vc <= Ve donc le bit resta à 1
1000 1100 1010
Vc
t (ms)
Volts
0
1
2
3
4
5
67
Ve
Le bit de poids faible est mis à 1.La tension Vc est de 4 + 0,5 x 1 = 5,5V.
Vc > Ve donc le bit repasse à 0
1000 1100 1010 1011
Vc
Etape 1
Etape 2
Etape 3
Etape 4
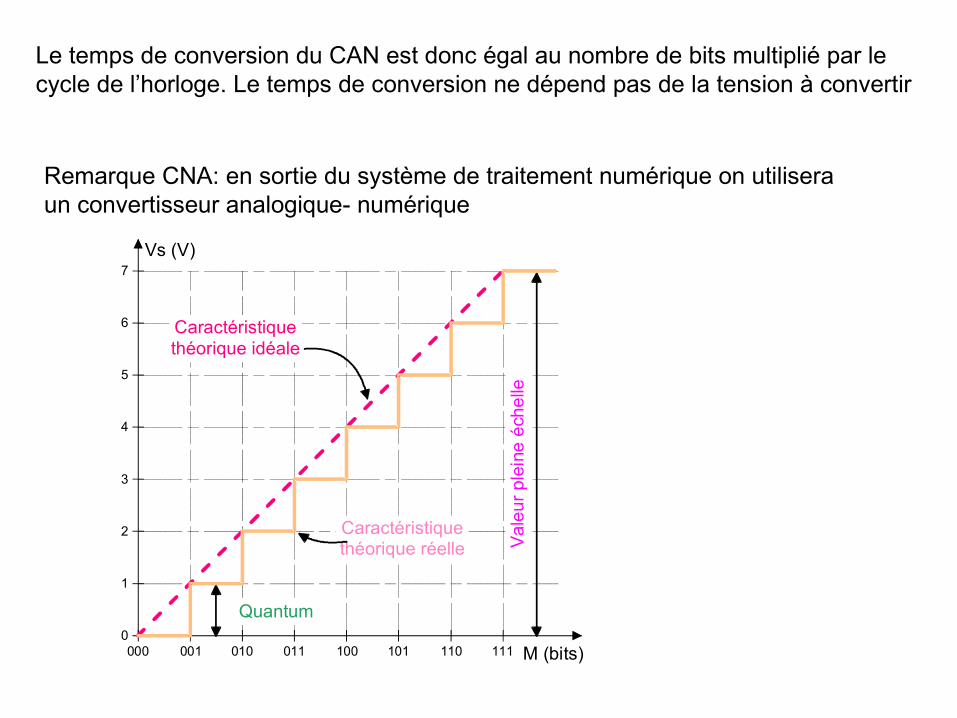
Remarque CNA: en sortie du système de traitement numérique on utilisera un convertisseur analogique- numérique
Le temps de conversion du CAN est donc égal au nombre de bits multiplié par le cycle de l’horloge. Le temps de conversion ne dépend pas de la tension à convertir
Vs (V)
M (bits)000 001 010 011 100 101 110 111
1
2
3
4
5
6
7
0
Caractéristique théorique réelle
Caractéristique théorique idéale
Quantum
Va
leu
r p
lein
e é
che
lle
Bibliographie:- Les capteurs en instrumentation industrielle Georges Asch et collaborateurs, Dunod 1995- Les capteurs, exercices et problèmes corrigés, Pascal Dassonvalle, Dunod
2005- http://pagesperso-orange.fr/michel.hubin/capteurs/instrum.htm- http://asi.insa-rouen.fr/enseignement/siteUV/capteur- traité de thermométrie par thermocouple et résistance TC S.A.