Embed Size (px)
Citation preview

L’année psychologique, 2007, 107, 303-336
La main vers la cible :intégration multi-sensorielle et contrôle
en ligne du mouvement de pointage
Fabrice Sarlegna*
Movement Neuroscience Laboratory, Department of Kinesiology – Biomechanics laboratory, The Pennsylvania State University, USA
RÉSUMÉ
Le système nerveux, l’interface entre les systèmes sensoriels et moteurs,permet aux êtres vivants d’interagir avec leur environnement. Cette revuepropose une synthèse critique des travaux sur les processus neuropsycholo-giques sous-tendant le contrôle d’un mouvement d’atteinte manuelledurant sa réalisation. Alors que nous vivons dans un environnement incer-tain, les sens visuels et proprioceptifs sont continuellement utilisés pourmettre à jour les représentations du corps et de l’espace et contrôler nosmouvements dirigés vers une cible. Le cas de la localisation de la main restecependant largement débattu (vision, proprioception, copie d’efférences ?).De récents résultats expérimentaux suggèrent que c’est la capacité dusystème nerveux à intégrer rapidement les informations visuelles et proprio-ceptives qui, couplée à sa faculté de prédiction, permet d’optimiser notrecomportement moteur.
Reaching for a target with the hand :Multi-sensory integration and online control of arm movements
ABSTRACT
The central nervous system, the interface between sensory and motor systems, allows us tointeract with our environment. This review presents a critical analysis of the currentknowledge on the neuropsychological processes underlying the online control of goal-directed arm movements toward visual targets. While we live within an uncertain environ-ment, the visual and proprioceptive systems are continuously used to update body and spacerepresentations, in order to control our movements. However, it is still not well understoodhow hand position is determined : is the hand localization process based on visual, proprio-ceptive, efferent signals ? It has been shown that visual, proprioceptive and internal feedback
*Adresse actuelle : UMR Mouvement & Perception, CNRS et Université de la Méditerranée, 163 avenue deLuminy, 13288 Marseille Cedex 9. E-mail : [email protected]. Un grand merci à Jean Blouin pour son « feedback », toujours utile, sur des versions précéden-tes de ce manuscrit.
07_Sarlegna.fm Page 303 Mercredi, 18. avril 2007 2:29 14

304
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
loops can be used to control in flight fast reaching movements. Recent results support theidea that peripheral and central feedback signals are integrated in an optimal fashion tocontrol the movements. This review highlights the rapidity of information processing anddiscusses the specificity of the online motor control as a function of the task constraints,before suggesting new lines of research.
INTRODUCTION
« Le mouvement est vraiment un aspect critique de la vie. Sans mouvement,nous ne pourrions pas nous nourrir, nous ne pourrions pas nous reproduire,et nous ne survivrions pas. »
Schmidt & Lee (1999, p. 4)Si nos actes destinés à atteindre un objet sont quotidiennement effectuésavec précision et bien souvent sans y prêter attention, ils relèvent néan-moins de processus d’une paradoxale complexité. La problématiqueenvisagée dans la présente revue s’inscrit dans le cadre des recherchesmenées au sein de nombreux champs disciplinaires tels que la psychologieexpérimentale, les neurosciences ou la kinésiologie (sciences du mou-vement, du sport) pour mieux comprendre les processus sous-tendantla production du comportement moteur humain (Scott, 2004). Cettethématique est abordée selon des approches neurophysiologiques,comportementale ou de modélisation et à partir d’expérimentations surdes sujets humains et animaux, sains ou pathologiques (absence de pro-prioception par exemple). Cependant, pour limiter la longueur de cetterevue et pour mieux définir son cadre de référence, nous nous concentre-rons principalement sur des études psychophysiques comportementalesde sujets humains.La littérature abondante sur le contrôle du mouvement montre que lecomportement moteur de l’Homme résulte des propriétés de son corps etde l’environnement dans lequel il évolue. Comme l’illustre la figure 1,adaptée de Massion (1997) et Vercher, Sarès, Blouin, Bourdin et Gauthier(2003), le système nerveux central (SNC) constitue l’interface entrel’environnement et le corps, c’est-à-dire entre les informations senso-rielles et les actes mis en œuvre. Pour mieux comprendre les relationsentre perception et action et inférer sur le fonctionnement du SNC,Woodworth (1899) fut un des premiers scientifiques à utiliser une tâcheétudiant le système moteur du bras. L’analyse de mouvements de bras est
07_Sarlegna.fm Page 304 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
305
L’année psychologique, 2007, 107, 303-336
en effet moins complexe que l’analyse des mouvements de tous les seg-ments du corps. Le but ultime reste néanmoins de comprendre lesmécanismes sous-tendant les mouvements dirigés dans une plus largeacception, le mouvement de projection de la main vers un objet semblantêtre sous-tendu par des processus de transformations sensori-motricessimilaires à de nombreux mouvements spatialement orientés (Paillard,1996). La tâche de pointage vers une cible visuelle permet notammentd’étudier les mécanismes nerveux où des entrées sensorielles doivent êtretransformées en réponses motrices. Ces mécanismes permettent dedétecter la cible présente dans le champ visuel et de programmer et guiderles mouvements vers celle-ci. L’objectif de cette revue est de présenter cer-taines études qui ont permis de mieux comprendre les processus deguidage d’un mouvement de bras durant son exécution vers une ciblevisuelle.
Le contrôle en ligne du mouvement est ce qui nous permet d’atteindrel’objectif fixé, malgré d’éventuelles erreurs de programmation ou d’événe-ments imprévisibles gênant la réalisation du mouvement. Ainsi, lestravaux sur cette thématique ont généralement utilisé une méthode où lesconditions environnementales sont ponctuellement modifiées afind’étudier le contrôle du mouvement durant sa réalisation. La propriété deflexibilité du système sensori-moteur est donc l’objet d’étude général deces recherches. Dans cette revue, nous essaierons notamment decomprendre comment les individus utilisent les informations visuelles etproprioceptives pour contrôler la trajectoire du mouvement en coursde réalisation. Nous verrons que les résultats de certaines études desti-nées à investiguer le contrôle en ligne peuvent être influencés par des
Figure 1. Le comportement moteur résulte de l’interaction entre l’environ-nement, le SNC et l’appareil musculo-squelettiqueFigure 1. Motor behavior results from the interaction between the environment, theCNS ans the musculo-skeletal apparatus
07_Sarlegna.fm Page 305 Mercredi, 18. avril 2007 2:29 14

306
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
mécanismes attentionnels ou cognitifs durant la préparation du mouve-ment. Nous argumenterons alors en faveur de méthodes où lesperturbations ne sont pas consciemment perçues, ce qui permet delimiter considérablement l’influence de processus de haut niveau parfoisdifficiles à interpréter. L’étonnante rapidité du système sensori-moteur àréagir à des perturbations non perçues sera alors mise en évidence. Toute-fois, avant de voir comment un mouvement est ajusté durant saréalisation, il est important de présenter brièvement comment un mouve-ment est initié.
INITIATION D’UN MOUVEMENT D’ATTEINTE MANUELLE
« Le concept de programme moteur pourrait être vu comme un ensemble decommandes musculaires qui est préparé avant qu’une séquence de mouve-ments commence, et qui permet à cette séquence d’être réalisée sans influencede boucles de rétroactions périphériques »
S. W. Keele (1968, p. 387)Tout comme le sens visuel permet de localiser un objet, il permet de loca-liser la main. De plus, le SNC dispose d’un sens propre pour lalocalisation des segments du corps : la proprioception, qui est le sens de laposition et du mouvement (Berthoz, 1997 ; Gandevia, Smith, Crawford,Proske & Taylor, 2006 ; Massion, 1997 ; Pearson, 2001). Des signaux sen-soriels de nature différente doivent donc être combinés pour l’émergenced’une représentation homogène de l’espace et pour l’organisation spatialedes mouvements (pour une revue, Desmurget, Pélisson, Rossetti & Pra-blanc, 1998). Historiquement, Woodworth (1899) fut un pionnier dans satentative d’explication du contrôle des mouvements dirigés de bras. Sonmodèle prédit qu’une première partie du mouvement, la phase dite detransport, vise à diriger la main à proximité de la cible. Elle serait réaliséeplutôt rapidement, d’où son imprécision (conflit vitesse-précision ; voiraussi Fitts, 1954) et serait l’unique résultat des commandes motricesinitiales. La seconde phase, qualifiée de phase d’approche, consisterait àguider la main précisément sur la cible grâce à la vision (Woodworth,1899). Ainsi l’auteur de ce long essai sur le comportement moteur distin-guait déjà les deux principaux types de processus impliqués dans laréalisation de mouvements dirigés : les mécanismes proactifs etrétroactifs.
07_Sarlegna.fm Page 306 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
307
L’année psychologique, 2007, 107, 303-336
Dans une contribution majeure à l’étude du contrôle de mouvements debras, Keele (1968) a proposé le concept de programme moteur, qui per-mettrait à un mouvement d’être réalisé sans rétroaction d’originepériphérique. Ainsi, un modèle uniquement proactif (« en boucleouverte ») pourrait permettre la réalisation d’un mouvement. Cettethéorie survint peu après la traduction des écrits de Bernstein (1967), oùl’on pouvait lire (p. 37)
:
« il existe dans le CNS la formule exacte des mou-vements […], le processus entier du mouvement selon son décourstemporel complet ».
Les raisons principales soutenant le concept de pro-gramme moteur sont que des mouvements coordonnés peuvent êtreeffectués en l’absence complète de rétroactions sensorielles périphériques(Sainburg, Ghilardi, Poizner, & Ghez, 1995 ; Sarlegna, Gauthier, Bourdin,Vercher & Blouin, 2006), ou même s’ils sont réalisés dans un temps tropcourt pour permettre à ces boucles de rétroaction d’agir sur le mouve-ment en cours (exemple du direct en boxe, des mouvements des doigtsd’un pianiste). De plus, des ajustements sont observés en anticipation descouples d’interaction entre les segments corporels pendant un mouve-ment (Sainburg et al., 1995). Enfin, plus un mouvement est complexe àréaliser, plus le temps de réaction (ou programmation) est élevé (Sch-midt & Lee, 1999).Keele (1968) a donc proposé un concept selon lequel un mouvementpouvait être réalisé en boucle ouverte. Cependant, contrairement à uneidée largement répandue, la définition de programme moteur de Keele nenécessite pas forcément qu’un mouvement soit balistique, c’est-à-direnon influencé par des boucles de rétroaction. Sa définition exprime seule-ment la possibilité qu’un mouvement soit réalisé sans utiliser desinformations provenant de récepteurs sensoriels périphériques. Destravaux de Keele (e.g., Keele & Posner, 1968) portant sur l’utilisation del’information visuelle dans des tâches motrices démontrent que Keele nenégligeait pas le rôle des boucles de rétroactions dans le contrôle en lignedu mouvement.
CONTRÔLE EN LIGNE DES MOUVEMENTS DE BRAS
Suite à la théorisation de Keele (1968), la possibilité d’un contrôlecontinu du mouvement a largement été étudiée, sans doute pour ren-verser un modèle relativement contre intuitif selon lequel les afférencespourraient ne pas être utiles. Adams (1971) ou encore Paillard (1986)
07_Sarlegna.fm Page 307 Mercredi, 18. avril 2007 2:29 14

308
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
ont alors proposé des modèles en boucle fermée, c’est-à-dire principa-lement basés sur les boucles de rétroaction. Il est séduisant de penserque le contrôle des mouvements dirigés pourrait opérer en comparanten continu les informations de localisation de main aux informationsde localisation de cible (Scott, 2004). Cette comparaison continuepourrait réduire les erreurs perceptivo-motrices, qui semblent inévita-bles à cause du bruit existant au niveau des signaux nerveux (Schmidt,Zelaznik, Hawkins, Frank, & Quinn, 1979 ; van Beers, Baraduc & Wol-pert, 2002). Les mécanismes de régulation du mouvement en courspermettraient donc de compenser pour une préparation erronée (Pra-blanc, Echallier, Komilis & Jeannerod, 1979 ; Desmurget & Grafton,2000 ; Desmurget, Turner, Prablanc, Russo, Alexander & Grafton,2005) ou pour une préparation incomplète du mouvement, commelorsque celui-ci doit être initié alors que tous ses paramètres n’ont pasété ajustés. De plus, l’environnement incertain dans lequel évoluel’Homme nécessite que ce dernier puisse réagir à un événementsoudain et inattendu. L’avantage principal du contrôle en ligne est qu’ildevrait permettre une économie de temps et d’énergie. À titred’exemple, si nous déclenchons un mouvement de bras pour saisir leverre amené par un garçon de café, ne pas contrôler en ligne le mouve-ment implique que si le garçon de café bouge le plateau pendant notregeste, nous n’atteindrons pas le verre. Ce n’est qu’à la fin du mouve-ment programmé (d’où perte de temps) qu’un nouveau mouvementsera réalisé (d’où nouvelle dépense d’énergie musculaire). Nous allonsvoir les différentes sources informationnelles que peut utiliser le SNCpour comparer en cours de mouvement l’emplacement de sa main àcelui de l’objectif spatial du geste.
CONTRIBUTION DE LA PROPRIOCEPTION AU CONTRÔLE EN LIGNE DES MOUVEMENTS
DE POINTAGE
De nombreux expérimentateurs ont cherché à étudier le rôle putatif de laproprioception dans le contrôle des mouvements de bras (Hasan, 2005pour revue). Toutefois, alors que la vision est relativement facile à mani-puler, le sens proprioceptif l’est plus difficilement. En effet, supprimer laproprioception de façon non invasive, de façon à ce que le sujet terminel’expérimentation dans le même état qu’il l’a commencée, n’est pas
07_Sarlegna.fm Page 308 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
309
L’année psychologique, 2007, 107, 303-336
évident. On pourra noter à titre d’anecdote que Garrett et Wallace (1975)ont dit avoir hypnotisé un bras et donc le sens proprioceptif de ce bras.D’autres méthodes telles que l’anesthésie ou l’ischémie ont également étéutilisées (e.g., Gandevia et al., 2006). Nous rapporterons dans cette partieles méthodes les mieux comprises et qui ont été reprises dans de nom-breuses expériences.Une méthode originale a été développée par Cordo. Des sujets sainsdevaient produire des extensions du coude et ouvrir la pince formée parle pouce et l’index au moment où la main passait en face d’une ciblevisuelle. Ce mouvement réalisé dans le plan horizontal ressemble aulancer de frisbee. Dans une de ses études, la vitesse et l’amplitude de mou-vement étaient variées en bloc, et la tâche était réalisée sans voir la mainpendant le mouvement (Cordo, Carlton, Bevan, Carlton & Kerr, 1994).De plus, le mouvement du sujet était réalisé passivement, un robot trans-portant le bras. Malgré les contraintes expérimentales, Cordo
et al
. (1994)ont observé que les sujets étaient extrêmement précis pour réaliser latâche, montrant que la proprioception permettait de coordonner précisé-ment nos actions.
Le modèle clinique de désafférentation
Les mécanismes de régulation du mouvement sur la base de la proprio-ception ont bien été caractérisés en étudiant la motricité de sujetsdépourvus du sens de la proprioception. Sherrington (1939) décrivit lecomportement de singes dont les racines dorsales de la moelle épinièreavaient été sectionnées. Observant qu’après rétablissement, les singesn’utilisaient pas le membre désafférenté, Sherrington conclut quel’information somato-sensorielle était nécessaire pour l’exécution demouvements volontaires. De nombreuses observations chez l’humainpermettent de dire aujourd’hui sans ambiguïté que les sujets proprio-ceptivement désafférentés sont capables de réaliser des mouvements,mais ceux-ci sont significativement moins précis (en terme de variabi-lité et d’exactitude selon la complexité de la tâche) que ceux de sujetssains lorsque les activités manuelles sont réalisées sans vision de lamain (Blouin, Bard, Teasdale, Paillard, Fleury, Forget & Lamarre,1993a, Ghez, Gordon & Ghilardi, 1995 ; Nougier, Bard, Fleury, Teas-dale, Cole, Forget, Paillard & Lamarre, 1996 ; Simoneau, Paillard, Bard,Teasdale, Martin, Fleury & Lamarre, 1999 ; Messier, Adamovich, Ber-kinblit, Tunik & Poizner, 2003 ; Sarlegna et al., 2006 ; pour une revue,Jeannerod, 1988).
07_Sarlegna.fm Page 309 Mercredi, 18. avril 2007 2:29 14

310
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
On peut noter que les patients désafférentés restent des cas extrêmementrares [une douzaine de cas recensés dans le monde selon Cole (1998)].Leur étude est précieuse car les déficits moteurs observés sont révélateursdu rôle de la proprioception. Toutefois, le fait que les sujets désafférentéssoient moins précis que des sujets disposant de proprioception ne peutque laisser suggérer un rôle du sens proprioceptif pour la régulation entemps réel des commandes motrices. En effet, ces patients sont constam-ment désafférentés, et les déficits observés dans de nombreuses étudessemblent également venir de problèmes de planification (Ghez
et al.
,1995 ; Sainburg et al., 1995). Il est cependant intéressant de constater quesans vision, les patients désafférentés ne peuvent pas réaliser des activitéscomme écrire (figure 2) ou boutonner une chemise (Cole, 1998). Cesremarques pourraient être corrélées au fait que la plus haute densité defuseaux neuromusculaires se trouve dans les muscles impliqués dans lecontrôle de la motricité fine (Pearson, 2001), ce qui semble souligner lerôle important de la régulation proprioceptive des mouvements deman-dant une extrême précision. Afin d’évaluer plus clairement le rôle de laproprioception dans le contrôle en ligne de mouvements de bras, de nou-veaux paradigmes ont dû être utilisés.
Figure 2. Signature d’une patiente désafférentée (GL). En haut, le nom« Ginette » est (très bien) écrit avec les yeux ouverts. Juste en dessous, avec lesyeux fermés, on aperçoit le début du mot : la patiente n’a pas senti qu’ellen’écrivait plus sur le papier dès le début de la signature, et a réalisé la suite« en l’air ».Figure 2. Signature of a deafferented patient (GL). Above, the patient has the eyesopen and writes the name « Ginette » very well. Bottom, with eyes closed, only thevery beginning of the word can be seen : the patient did not feel that she was notwriting anymore on the paper after a short period of time, and drew the rest of thesignature in the air.
07_Sarlegna.fm Page 310 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
311
L’année psychologique, 2007, 107, 303-336
La méthode de vibration myotendineuse
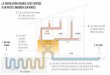
Il a été maintes fois observé qu’une stimulation vibratoire appliquée sur lebiceps brachii d’un sujet rendu aveugle (avec les yeux fermés ou des lunettesopaques) produit une illusion d’extension de l’avant-bras. Capaday et Cooke(1981) ont eu l’idée d’appliquer une telle vibration lors de mouvementsmono-articulaires impliquant le coude (figure 3). Lorsque les sujets avaientles yeux fermés, la vibration du muscle antagoniste a résulté en une sous-estimation de la localisation de la cible, la vibration du muscle étiré pendantle mouvement de pointage « faisant croire » au SNC que le mouvement aatteint son but d’où une erreur de sous-estimation. Redon, Hay, et Velay(1991) ont ensuite étendu ces résultats à des mouvements pluri-articulairesde bras, montrant également l’importance des boucles proprioceptives derégulation dans la phase finale d’ajustement du mouvement.
Une critique qui peut toutefois être adressée à la méthode de vibration estla difficulté de contrôler les effets réels de vibration. Ainsi, dans l’étude deGilhodes, Roll et Tardy-Gervet (1986), les illusions des sujets ont clairementvarié en fonction de la fréquence de vibration appliquée sur le biceps.Plus gênant encore, le membre peut être perçu dans une configuration
Figure 3. Méthode de vibration appliquée à la tâche de pointage. La vibra-tion d’un muscle fléchisseur du coude entraîne une illusion d’extension ducoude (hachuré).Figure 3. Use of the muscle vibration technique during a pointing task. The vibration ofthe biceps brachii, elbow flexor, results in the illusion of elbow extension (hatched arm).
07_Sarlegna.fm Page 311 Mercredi, 18. avril 2007 2:29 14

312
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
anatomique impossible (Craske, 1977), suggérant que des processusd’ordre cognitif vont intervenir pour tenter de solutionner le conflit. Ilconvient donc de dire que la méthode de vibration permet de perturber lesens proprioceptif du muscle, mais que les effets objectifs d’une telle sti-mulation sont difficiles à contrôler pour l’expérimentateur.
Comment perturber le comportement par le biais de la proprioception ?
L’ajout imprévisible de résistance à l’avancement d’un mouvement réalisésans vision a été utilisé pour savoir si la proprioception permettait deprendre en compte de telles perturbations et de préserver la précision desmouvements d’atteinte de cible (Hasan, 2005 pour revue). Ce type de per-turbation a été utilisé avec le protocole expérimental de Cordo décritprécédemment et malgré la résistance (ou la réduction de la résistance)appliquée au mouvement de bras, les sujets ont continué à ouvrir la mainavec la même précision que lorsqu’il n’y avait pas de variation de résistance(Cordo, 1990). En fait, on peut estimer que dans la vie de tous les jours, lamasse que l’on doit déplacer (incluant le bras, mais aussi un objet tel qu’unverre ou un marteau que l’on utilise) n’est généralement pas connue exacte-ment et les commandes motrices générées pour amener le bras à un endroitciblé peuvent être sous-estimées ou sur-estimées. Pour mouvoir le bras pré-cisément et rapidement, un mécanisme de correction d’erreurs serait trèsutile (Brown & Cooke, 1981 ; Gordon & Ghez, 1987). La compensationmotrice qui a été effectivement observée lors de variations de masse semblerésulter de l’interaction de plusieurs mécanismes. La perturbation méca-nique peut déclencher des réponses réflexes (d’étirement) qui servo-assistent le mouvement afin qu’il atteigne la cible. Lorsque la perturbationest relativement faible, ces réponses réflexes peuvent suffire à compenser lavariation de charge mais lorsque celle-ci est plus importante, les réflexesspinaux ne permettent pas d’exciter les motoneurones avec une intensitésuffisante. Dans le cas de perturbation plus importante, des réponses corti-cales sont nécessaires pour produire de profonds changements d’activation.Ces réponses pourraient correspondre à des réponses intentionnelles, plustardives que les réponses automatiques. En effet, Crago, Houk, et Hasan(1976) ont montré que les réponses tardives aux perturbations mécaniquespouvaient être supprimées si le sujet était instruit avant le mouvement « dene pas intervenir volontairement » suite à la perturbation.Pour généraliser l’idée de contrôle en ligne proprioceptif en réponse à desperturbations mécaniques, on peut noter que Gottlieb (1996) a montré
07_Sarlegna.fm Page 312 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
313
L’année psychologique, 2007, 107, 303-336
que la proprioception permettait de contrôler le geste lorsqu’une chargeinertielle (une masse ajoutée au début du mouvement), élastique (aug-mentant avec le déplacement) ou visqueuse (augmentant avec la vitesse)était aléatoirement appliquée sur le bras. Coello, Orliaguet et Prablanc(1996) ont soumis leurs sujets à un environnement gravito-inertielmodifié. Assis sur une plate-forme rotative, les sujets devaient pointervers des cibles visuelles sans vision du bras. Coello
et al.
(1996) ontobservé que malgré les forces appliquées sur le bras durant les pointages,l’amplitude des mouvements n’était pas affectée, même lors du premieressai, suggérant un contrôle en ligne de l’amplitude des mouvements surla base des afférences proprioceptives. En général, ces études ont doncmontré que le SNC pouvait utiliser les informations proprioceptives pourdétecter et corriger des erreurs lorsque des forces externes dévient la tra-jectoire des mouvements. De manière intéressante, Coello
et al.
(1996)ont observé que la direction des mouvements était significativementinfluencée par le champ de force lors du premier essai. Ceci pourrait sug-gérer que la direction des mouvements de bras est principalementcontrôlée à partir des boucles de rétroactions visuelles sur la localisationde la main (tout au moins pour ce type de perturbation, voir égalementBourdin, Gauthier, Blouin & Vercher, 2001), alors que l’amplitude seraitprincipalement contrôlée via la proprioception.
Durée des boucles de correction basées sur la proprioception de la main
L’estimation des délais de traitement des informations sensorielles est d’unegrande importance pour les théories du contrôle moteur en boucle fermée.Une des raisons pour laquelle la théorie centraliste du contrôle du mouve-ment a été dominante pendant des années est que les délais des boucles derétroactions sensorielles semblaient trop longs pour permettre un contrôlecourant efficace des mouvements. À titre d’exemple, Redon
et al.
(1991) ontrapporté que la perturbation du sens proprioceptif par vibration avait uneffet sur la précision des mouvements multi-articulaires de bras en 200 msenviron. Cependant, la technique de vibration pourrait induire une suresti-mation du temps de traitement de l’information proprioceptive liée autemps nécessaire à la mise en place de l’illusion. En fait, Vince (1948) avaitdéjà observé que lorsqu’un ressort perturbait de manière inattendue la réali-sation d’un mouvement, des ajustements compensatoires apparaissaientaprès 160 ms. Dans une étude de Higgins et Angel (1970), la tâche des sujets,qui ne pouvaient entendre ou voir la perturbation, consistait à maintenir
07_Sarlegna.fm Page 313 Mercredi, 18. avril 2007 2:29 14

314
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
leur main en position stationnaire. Aussitôt qu’ils sentaient bouger la maindans un sens, ils devaient produire une force de sens opposé pour maintenirleur main stable dans l’espace. Les temps mesurés entre le début du mouve-ment déclenché par les expérimentateurs et le début de la décélération de cemouvement ont varié entre 108 et 169 ms. Il est intéressant de noter queHiggins et Angel ont vraisemblablement eu du mal à croire que l’informa-tion proprioceptive soit traitée aussi rapidement. En effet, leur interprétationa été que des boucles internes liées aux efférences permettant de maintenir lamain stable dans l’espace avaient été utilisées pour être comparées à unevaleur de référence. Cette hypothèse, très improbable dans le cas de mouve-ments passifs où les efférences ne devraient varier qu’après qu’undéplacement de la main ait été perçu, démontre surtout l’état d’esprit del’époque où les spécialistes du contrôle du mouvement étaient persuadés quele traitement de l’information était long et coûteux.Il a été montré par la suite que si le sujet est informé à l’avance d’une pos-sible perturbation, les corrections en réponses à des perturbationsmécaniques sont plus précoces (d’environ 30 ms) et moins variables(Boulinguez & Nougier, 1999 ; Crago
et al.
, 1976 ; Newell & Houk, 1983).Ceci suggère qu’à un certain degré, les boucles de rétroactions proprio-ceptives sont sous contrôle cognitif. Le délai entre la perturbation et lamise en place de modifications au plan cinématique du mouvement seraitd’environ 100-150 ms, une valeur avancée par de nombreux travaux(Boulinguez & Nougier, 1999 ; Crago
et al.
, 1976 ; Newell & Houk, 1983 ;Cordo et al., 1994 ; pour revues, Poulton, 1981 ; Schmidt & Lee, 1999 ;Diedrichsen, Hashambhoy, Rane and Shadmehr, 2005). Ceci démontreque les processus de correction sur la base d’informations proprioceptivesont des délais assez réduits, soutenant l’idée que la proprioception joueun rôle déterminant dans la coordination des actes moteurs.
Contribution des boucles internes au contrôle des mouvements de pointage : les copies d’efférences permettent-elles de localiser la main pendant le mouvement ?
« Le cerveau sert à prédire le futur, à anticiper les conséquences de l’action(la sienne ou celle des autres), à gagner du temps. »
A. Berthoz (1997, p. 7)En 1866, Helmholtz parlait d’« effort of will » pour définir le signal per-mettant au SNC de percevoir les yeux comme étant en mouvement. En1950, von Holst et Mittelstaedt ont proposé le concept de copie d’effé-rence, l’idée étant que le SNC pourrait utiliser des copies des efférences
07_Sarlegna.fm Page 314 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
315
L’année psychologique, 2007, 107, 303-336
qu’il génère pour réaliser des estimations sur le mouvement à venir. Leconcept de décharge corollaire proposé par Sperry (1950) illustre bienl’idée selon laquelle à la suite de l’envoi d’une commande motrice, descopies irradieraient le SNC. L’utilité d’une telle activité endogène estqu’elle permettrait une anticipation des conséquences prévisibles descommandes motrices sans attendre l’information des récepteurs senso-riels périphériques.Dans une étude qui aura incontestablement contribué à la mise en évi-dence de boucles internes participant au contrôle du mouvement de bras,Cooke et Diggles (1984) ont demandé à huit sujets de produire des mou-vements de bras en direction de cibles visuelles. Deux cibles étaientutilisées, nécessitant soit une flexion, soit une extension du coude. Aprèsque les participants aient appris à initier leur réponse le plus rapidementpossible à la suite de l’illumination de l’une des deux cibles (temps deréaction de 250 ms environ), ils devaient réaliser 200 pointages. Lesauteurs ont rapporté que parmi les 1 600 mouvements enregistrés, 51comprenaient une portion initiale qui était dirigée vers la mauvaise cible.Les auteurs ont déterminé à quel moment apparaissaient les premièresmodifications de trajectoire (renversements de direction). Cooke etDiggles ont rapporté que dans 18 essais, les corrections étaient observéesmoins de 90 ms après le début du mouvement. Pour les auteurs, le faitque des corrections aient été relevées seulement 30 ms après le début dumouvement indiquait (p. 361) :
“L’évidence suggère donc que la détectionde l’erreur initiale de la direction du mouvement dans la présente étuden’était basée ni sur l’information visuelle du membre en mouvement ni surl’information proprioceptive du membre. Nous suggérons que la détection del’erreur et la correction ont été réalisées à un niveau central.”
La démonstration expérimentale du fait que des modifications du mouve-ment puissent être déterminées par le SNC sur la base d’une anticipationa sans doute contribué au développement de concepts tels que celui dumodèle interne (plus précisément le modèle direct, voir Miall, Weir, Wol-pert & Stein, 1993 ; Desmurget & Grafton, 2000 ; Vercher et al., 2003 ;Scott, 2004). Toutefois, la méthode de calcul utilisée par Cooke et Diggles(1984) pour déterminer la durée des boucles internes semble erronée. Eneffet, les auteurs annoncent (p. 348) :
« Les temps de correction d’erreur(temps de l’initiation au renversement du mouvement dans la mauvaisedirection) allait de 30 à 150 ms ».
Cependant
les auteurs indiquent par lasuite (p. 360) que :
« les changements dans les commandes musculairesrésultant de la correction de l’erreur peuvent être déclenchés bien avant toutsigne de mouvement du membre ».
Les auteurs admettent donc que le pro-cessus interne de correction de l’erreur a débuté avant le début du
07_Sarlegna.fm Page 315 Mercredi, 18. avril 2007 2:29 14

316
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
mouvement. En fait, comme Georgopoulos, Kalaska et Massey (1981)chez le primate non-humain, puis Soechting et Lacquaniti (1983) chezl’homme, venaient de le montrer, des modifications de commandesmotrices (ou la génération des nouvelles commandes motrices) peuventêtre réalisées pendant le temps de réaction, c’est-à-dire avant que le mou-vement ne puisse être physiquement observé. Dans l’étude de Cooke etDiggles (1984), il est vraisemblable que les sujets se sont aperçus pendantle temps de réaction de leur erreur. Toutefois, il semble difficile de savoiravec précision à quel instant les sujets ont commencé à corriger leurerreur, ce qui complique significativement le calcul d’un temps de correc-tion d’erreur. Cette étude de Cooke et Diggles (1984) a doncincontestablement démontré la contribution de processus internes àl’ajustement des commandes motrices, mais les auteurs ont avancé destemps de correction d’erreur qui ne reflétaient sans doute pas la durée duprocessus de correction.Récemment, une étude de Bard, Turrell, Fleury, Teasdale, Lamarre etMartin (1999) a montré que des mouvements de bras pouvaient êtrecontrôlés en ligne sans afférences sensorielles permettant de localiser lamain. Ainsi, Bard
et al.
(1999) ont observé qu’une patiente désafférentéepouvait atteindre une cible visuelle alors même que ses mouvementsétaient très rapides (30 cm en 250 ms), que le bras ne pouvait être vupendant le mouvement et que la cible était déplacée quelques ms avant ledébut du mouvement. Nous avons récemment répliqué et rediscuté cesrésultats (Sarlegna
et al.
, 2006), qui suggèrent que le SNC peut corrigerdes trajectoires de mouvement de bras sur la base de copies d’efférencesutilisées pour localiser la main pendant le mouvement. Le SNC pourraitdonc dériver le signal d’erreur entre les positions de la cible et de la mainen comparant la représentation interne de la position de cible, dérivée desinformations rétiniennes et extra-rétiniennes, à la représentation internede la position de main, dérivée de la vision, de la proprioception ou uni-quement de copies d’efférences. L’avantage de ce mode de calcul del’erreur entre le mouvement désiré et le mouvement effectivement réaliséest qu’il est quasi-immédiat et ne nécessite pas d’attendre le traitementdes informations visuelles ou proprioceptives (Desmurget & Grafton,2000). Cependant, l’importance des afférences périphériques sensoriellesest soulignée par des observations de Gauthier et Mussa-Ivaldi (1988) etVercher, Gauthier, Guédon, Blouin, Cole et Lamarre (1996) sur despatients désafférentés qui, en l’absence de rétroactions visuelles et pro-prioceptives, sont incapables de suivre des yeux leur main, pourtantdéplacée de manière active (Vercher et al., 2003 pour revue).
07_Sarlegna.fm Page 316 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
317
L’année psychologique, 2007, 107, 303-336
La localisation de la main dans l’espace sur la base de boucles internesrapides est une idée soutenue par de récents travaux de Gandevia et al.(2006). Désormais, il semble généralement accepté que les signaux effé-rents internes soient utilisés pour l’anticipation des conséquences d’uneaction à venir sur l’appareil moteur (Hugon, Massion & Wiesendanger,1982 ; Sainburg
et al.
, 1995 ; Berthoz, 1997 ; Massion, 1997 ; Danion,2004). Ces signaux permettraient également la coordination entre mouve-ments oculaires et mouvements de bras (Gauthier & Mussa-Ivaldi, 1988 ;Ariff, Donchin, Nanayakkara & Shadmehr, 2002). L’étude de Shadmehret collaborateurs (Ariff
et al.
, 2002) a notamment permis de montrerqu’un modèle interne de notre appareil moteur du bras permet de réaliserdes prédictions sur l’endroit où la main sera dans plus d’une centaine dems lors de mouvements rapides du bras. En effet, les auteurs ont montréque des saccades oculaires peuvent être réalisées précisément vers la posi-tion où sera la main en mouvement, et ce malgré l’absence de vision.
Contribution de la vision de la main au contrôle en ligne des mouvements de pointage
La vision contribue au contrôle courant des mouvements rapidesd’atteinte manuelle.Cette affirmation qui semble tellement triviale a pourtant été sujette à denombreuses discussions scientifiques et est encore débattue aujourd’hui.Les différentes méthodes utilisées pour étudier ce rôle ont toutes consistéà manipuler l’information visuelle disponible pour en mesurer l’effet surles mouvements de pointages.
La méthode de suppression d’information : vision vs non vision
Dès 1899, Woodworth s’est intéressé au conflit vitesse – précision et aurôle de la vision dans le contrôle du mouvement. En demandant auxsujets de fermer les yeux, son idée était qu’« ouvrir » la boucle de contrôlevisuelle et comparer la précision obtenue à celle observée en condition deboucle visuelle fermée permettrait d’étudier le rôle de la vision dans lecontrôle en ligne des mouvements de pointage. L’ambiguïté de cettecomparaison est qu’en fermant les yeux, les sujets sont privés des affé-rences visuelles relatives à la main mais aussi à la cible et l’environnement. Ladiminution de précision généralement observée pourrait ainsi provenir del’absence d’information visuelle sur la localisation de la cible. De nombreusesexpériences plus récentes, où les paramètres expérimentaux ont été mieux
07_Sarlegna.fm Page 317 Mercredi, 18. avril 2007 2:29 14

318
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
contrôlés, ont montré que les sujets font généralement moins d’erreurslorsqu’ils peuvent voir leur main pendant le mouvement par rapport àlorsqu’ils ne peuvent pas la voir (pour revues, voir Jeannerod, 1988 ;Carlton, 1992 & Paillard, 1996). De plus, la vision courante de la mainpermet de réduire la variabilité terminale du mouvement(Hay & Beaubaton, 1986). En fait, une étude pionnière de Prablanc,Echallier, Komilis et Jeannerod (1979) avait montré que c’était bien lesignal visuel permettant de localiser la main, et non le signal visueldonnant directement le signal d’erreur entre la main et la cible visuelle,qui était utilisé pour contrôler en ligne les mouvements d’atteinte. Eneffet, le bénéfice en terme de précision est observé pour la condition avecvision courante de la main (en comparaison à celle sans vision de la mainpendant le mouvement) aussi bien lorsque la cible est visible que nonvisible pendant le mouvement.Une légère variante de la méthode de suppression a consisté à manipulerla vision de certaines portions du mouvement. Carlton (1981) a ainsidécouvert que voir la portion finale de la trajectoire était particulièrementimportant pour l’atteinte de cibles, comme le modèle de Woodworth(1899) le suggérait. Carlton (1981), puis Beaubaton et Hay (1986), ontobservé que la précision d’un mouvement était similaire lorsque toute latrajectoire ou seulement la portion finale était visible. De façon assezsimilaire, Bard, Hay et Fleury (1985), Bard, Paillard, Fleury, Hay et Larue(1990) et Blouin, Teasdale, Bard et Fleury (1993b) ont montré l’impor-tance de la vision de la portion initiale de la trajectoire pour la précisiondes mouvements multi-segmentaires. Il semble donc que le CNS soit dotéd’une puissante flexibilité qui lui permet d’utiliser les informationsvisuelles provenant de toute portion du mouvement, pour corriger deserreurs dans la réalisation du mouvement.La contribution de la vision au contrôle en ligne du mouvement a égale-ment bien été illustrée grâce à des protocoles où de nouvelles forcesexternes étaient appliquées sur le bras. En plaçant des sujets sur une plate-forme rotative, Bourdin
et al.
(2001) ont observé que la vision courantedu bras permettait au sujet de conserver une bonne précision même lorsdu premier essai où les sujets découvraient la perturbation. L’expérienced’Elliott, Heath, Binsted, Ricker, Roy et Chua (1999) où un champélectro-magnétique était utilisé pour perturber ponctuellement la réalisa-tion du mouvement, a également permis de montrer la puissance desmécanismes de régulation visuelle du mouvement. En effet, la vision de lamain permettait aux sujets d’atteindre aussi précisément la cible qu’il y aitune réduction, une stabilité ou une augmentation de l’intensité duchamp. En moyenne, les sujets atteignaient la cible dans 76 % des essais.
07_Sarlegna.fm Page 318 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
319
L’année psychologique, 2007, 107, 303-336
Cette observation renforce donc l’idée selon laquelle les boucles de cor-rection visuelles permettent de corriger des erreurs importantes de latrajectoire initiale du mouvement. Cependant, la limite d’un tel résultatest qu’il ne permet pas de différencier complètement la contribution desinformations visuelles de localisation de main au contrôle du mouvementpar rapport aux informations proprioceptives. En effet, lorsque les sujetsétaient privés de vision de la main, ils parvenaient encore à atteindre lacible dans 67 % des essais. Il n’est alors pas possible d’affirmer avec certi-tude que les résultats obtenus avec vision de la main soient dus àl’utilisation exclusive de l’information visuelle ou que la performanceobtenue soit due à la combinaison des informations visuelles etproprioceptives.Un exemple intéressant d’interaction visuo-proprioceptive vient del’étude de Redon et al. (1991) qui avaient observé des augmentationsd’erreur lorsqu’une vibration était appliquée sur le biceps lors de mouve-ment de bras (non visible). Toutefois, ces erreurs disparaissaient lorsqueles sujets pouvaient voir leur main, ce qui montre l’importance du sensvisuel. Cette importance a également été soulignée par les études mon-trant que lorsque des sujets désafférentés ont la vision du membre (quidemeure leur seule source sensorielle les renseignant sur la localisation dela main), ils sont aussi précis que des sujets sains (Ghez et al., 1995 ;Nougier et al., 1996 ; voir aussi Cole, 1998). Gauthier et Mussa-Ivaldi(1988 ; p. 144) ont pu observer que dès le premier jour après la désaffé-rentation de babouins, chaque animal était capable d’amener avec sonmembre désafférenté, sous contrôle visuel, un morceau de pomme à sabouche. Ces travaux montrent donc bien que la vision permet de réaliserdes mouvements précis malgré d’importants déficits proprioceptifs.Dans les protocoles de suppression de l’information souvent utilisés pourétudier la contribution de la vision du membre au contrôle courant dumouvement, les sujets réalisent à la fois des essais avec et sans vision de lamain pendant le mouvement. Certains auteurs ont avancé la possibilitéque les sujets utilisent l’information visuelle d’erreur pour ajuster lescommandes motrices des mouvements subséquents (stratégie « offline »,Bard et al., 1985 ; Khan, Lawrence, Franks & Buckolz, 2004). L’effet de cetype de connaissance du résultat a en effet été clairement montré parBeaubaton et Hay (1986) ou Ghez et al. (1995). De plus, une critiqueavancée, et expérimentalement vérifiée, à l’égard de ce type de paradigmea indiqué que lorsque les sujets ne savent pas s’ils vont pouvoir voir leurmain pendant le mouvement rapide, ils se préparent à agir comme si cetteinformation visuelle n’allait pas être disponible (Zelaznik, Hawkins & Kis-selburgh, 1983 ; Elliott & Allard, 1985). Cette stratégie pourrait augmenter
07_Sarlegna.fm Page 319 Mercredi, 18. avril 2007 2:29 14

320
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
les délais de traitement, ce qui expliquerait que la vision de la main nepuisse être utilisée pour le contrôle en ligne de mouvements rapides dansdes situations avec une telle incertitude. En conclusion, supprimer lesinformations visuelles pour répondre aux questions liées aux contribu-tions des informations visuelles pour le contrôle des mouvements rapidesest une méthodologie conduisant à des résultats à interpréter avecprécaution.
La manipulation des informations visuelles ou l’appel à la créativité scientifique
Une autre méthode pouvant être utilisée pour étudier le rôle de la visiondans le contrôle courant du mouvement consiste à modifier, sans la sup-primer, l’information visuelle et à étudier si cette manipulation affecte legeste. Cruse, Dean, Heuer et Schmidt (1990, p. 58) ont rapporté unexemple original d’expérience de distortion des réafférences visuelles de lamain, réalisée par Nielsen (1963). Nielsen avait demandé à des sujets detracer une ligne droite. La main gantée que les sujets pouvaient voirn’était toutefois pas leur main mais celle de l’expérimentateur. Lorsque lamain visible faisait une courbe plutôt qu’une ligne droite, les sujets pro-duisaient une déviation de leur propre mouvement de main dans le sensopposé. Ces résultats, confirmés et approfondis par une série d’études deFourneret et Jeannerod (e.g., 1998), montrent que l’information visuelleest utilisée pour corriger une erreur perçue de trajectoire.En 1985, Elliott et Allard ont utilisé des prismes déviant le champ visuelde 15° pour que les sujets réalisent, et perçoivent visuellement, des erreursdans la trajectoire initiale des mouvements par rapport à la cible. Or lessujets parvenaient à atteindre la cible avec une bonne précision dès lepremier essai d’exposition prismatique, malgré la rapidité des mouve-ments (170 ms en moyenne pour une cible située à 20 cm). Toutefois, lefait que les sujets aient dû porter des prismes pourrait avoir conduit lessujets à élaborer des stratégies ou à détecter un conflit sensoriel. À la suitede ces travaux, un certain essoufflement a pu être observé sur les recher-ches menées sur le rôle de la vision dans le contrôle en ligne dumouvement. Cet essoufflement semble être en partie dû aux limites tech-niques qui font que pour observer le rôle de la vision du membre dans lecontrôle du mouvement, les scientifiques utilisaient principalement laméthode vision vs. non vision. Ce n’est qu’à partir du moment où lestechniques de réalité virtuelle ont été développées et intégrées dans lesprotocoles de recherche sur le contrôle moteur qu’un renouveau a été
07_Sarlegna.fm Page 320 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
321
L’année psychologique, 2007, 107, 303-336
observé. C’est à partir de 2003 que la thématique du contrôle en lignevisuel est réapparue chez quelques groupes de recherche (celui de DavidKnill, et celui de Jean Blouin, Gabriel Gauthier et Jean-Louis Vercherdont l’auteur est issu). Ainsi, en utilisant des techniques de réalité vir-tuelle permettant de modifier ponctuellement la position vue de la mainsans que le sujet ne s’en aperçoive, Sarlegna, Blouin, Vercher, Bresciani,Bourdin et Gauthier (2004) et Saunders et Knill (2005) ont montré quel’information visuelle de la main était utilisée pour ajuster la trajectoiredes mouvements rapides de pointage. Bien qu’un contrôle en ligne effi-cace sur la base de la vision de la main ait été la conclusion de nombreuxpapiers par le passé, les protocoles utilisés (bien souvent avec/sans visionde la main) avaient souvent laissé planer un doute sur le rôle des pro-cessus « offline ». Ces récentes études ont permis de montrerindiscutablement que l’information visuelle de localisation de mainpouvait être utilisée pour le contrôle en temps réel de mouvementsrapides d’atteinte.
Durée des boucles de correction basées sur la localisation visuelle de la main
La loi de Fitts (1954), une des premières formalisation mathématique ducontrôle du mouvement, indique que plus le mouvement est réalisé rapi-dement, moins sa précision est bonne. Comme Woodworth (1899) lesuggérait, l’idée était que l’imprécision pouvait être liée à la moins bonneutilisation, voire l’impossibilité d’utiliser les informations afférentes pourcontrôler le mouvement. En combinant la méthode de suppression vueci-dessus avec une méthode de variation du temps de mouvement, cer-tains auteurs ont étudié plus en détail la contribution des rétroactionsvisuelles au contrôle en ligne des mouvements d’atteinte.Keele et Posner (1968) ont essayé de mesurer le temps de traitement del’information visuelle de la main pour le contrôle du mouvement de brasen supprimant de façon aléatoire la vision du mouvement (par l’extinc-tion d’une lumière, la cible restant visible en toutes circonstances danscette expérience) au moment où le mouvement débutait. Ces auteurs ontobservé que la vision de la main permettait une meilleure précision despointages lorsque le temps de mouvement était de 267 ms en moyenne,par rapport à la condition sans vision. Toutefois voir la main pendant lemouvement n’influençait pas la précision du pointage lorsque le temps demouvement était de 190 ms en moyenne. Keele et Posner (1968) ont doncprécisé une gamme de temps de mouvement (entre 190 et 267 ms) à
07_Sarlegna.fm Page 321 Mercredi, 18. avril 2007 2:29 14

322
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
partir de laquelle l’effet de rétroactions visuelles sur la localisation de lamain pouvait être observé sur le comportement moteur des individus. Cetemps représenterait le délai d’intervention des boucles de rétrocontrôlevisuel. Confirmé par d’autres travaux, ce délai d’environ 200-250 ms alongtemps influencé les scientifiques dans leur conception du contrôle dumouvement. À titre d’exemple, Beggs et Howarth (1970) ont rapportéque le temps d’utilisation de l’information visuelle était d’environ 290 ms.Pourtant, dans une condition expérimentale, un temps de traitement de165 ms avait été calculé mais les auteurs, à la manière de Higgins et Angel(1970) concernant le délai proprio-manuel, ont plutôt suggéré « il sembley avoir un résultat anormal » (p. 758). Cet exemple est révélateur de lacroyance de l’époque selon laquelle les délais des boucles de rétroactionne pouvaient être aussi réduits.Il semblerait qu’une étude de Conti et Beaubaton (1976) soit une des pre-mières indications d’une latence visuo-motrice plus courte que 200 ms.En effet, Conti et Beaubaton (1976) ont observé que lorsque les mouve-ments étaient réalisés en moins de 200 ms, voir la portion initiale de latrajectoire permettait de réaliser moins d’erreurs que lorsqu’aucune infor-mation visuelle n’était disponible. Les travaux de Carlton (1981) ontensuite permis une estimation plus précise du temps nécessaire pour quel’information visuelle de la main affecte la cinématique du mouvement.Ainsi, lorsque l’information visuelle devenait disponible en cours demouvement, des modifications du profil de vitesse du mouvement ont étédétectées après un délai moyen de 135 ms. Fait intéressant remarqué parCarlton (1981), une estimation similaire du délai visuo-moteur avait déjàété rapportée lors de l’étude du système oculomoteur de Becker et Fuchs(1969). Ceux-ci avaient rapporté que les saccades avaient tendance à êtrehypométriques, c’est-à-dire toujours de trop faible amplitude (d’environ10 %) par rapport à la position de la cible. Pour fovéaliser la cible, unesaccade dite de correction était réalisée sur la base de l’erreur visuellementperçue. Becker et Fuchs (1969) ont estimé que le temps moyen séparant lafin de la première saccade du début de la seconde saccade était de 130 ms,soit une valeur très similaire à celle que Carlton rapporta pour le systèmemanuel. En plus de ce résultat, Carlton (1981) a également montréqu’une analyse détaillée de la cinématique du mouvement représentaitune méthode sensible pour estimer des délais d’intervention de méca-nismes nerveux.Par la suite, les résultats de Beaubaton et Hay (1986) ont soutenu l’idée delatences d’utilisation très courtes. Ces auteurs ont en effet observé quel’erreur terminale de pointage observée sans vision de la main étaitréduite en condition de vision de la main pour des pointages de durée
07_Sarlegna.fm Page 322 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
323
L’année psychologique, 2007, 107, 303-336
comprise entre 110 et 150 ms (voir également Bard
et al
., 1985 ;Hay & Beaubaton 1986). De nombreuses études ont rapporté de telsdélais de prise en compte de l’information visuelle de la main (Zelaznik
etal.
, 1983 ; Elliott & Allard, 1985 ; Blouin
et al.
, 1993b ; Khan et al., 2004 ;pour revues, Carlton, 1992 ; Paillard, 1996). Toujours dans le but detester la contribution de l’entrée visuelle au contrôle de mouvementd’atteinte, Smith et Bowen (1980) ont eu l’idée de fournir aléatoirementaux sujets un retour visuel retardé, de 66 ms par rapport au mouvementréel du bras, grâce à un système de caméra vidéo. Pour les mouvementsréalisés en 164 ms en moyenne, le délai de 66 ms a entraîné une hypermé-trie par rapport à la condition sans délai. Cette observation suggère que ladurée minimale des boucles de correction basées sur l’informationvisuelle de la main est au plus de 100 ms, sinon le délai de 66 ms n’auraitpas affecté les mouvements réalisés en 164 ms.Plus récemment, Sarlegna
et al.
(2004) et Saunders et Knill (2005) onttesté l’effet de modifications subtiles (respectivement discrètes et gra-duelles) de l’information visuelle de la main pendant le mouvement. Lesauteurs ont pu remarquer que des modifications de trajectoire en réponseà ces perturbations apparaissaient après 150 ms en moyenne. Die-drichsen
et al.
(2005) ont confirmé ces résultats lorsqu’une rotationvisuo-motrice continue est utilisée (la main est dirigée dans une directionmais le curseur représentant la main se déplace avec un biais d’environ30°). Au regard de l’ensemble de ces études, il apparaît que la visionsemble contribuer rapidement au contrôle du mouvement. Cependant, ily a une importante variabilité entre les durées rapportées des bouclesvisuo-motrices, qui est probablement due au moins pour partie aux diffé-rentes méthodes expérimentales employées. Dans l’expérience de Keele etPosner (1968) par exemple, les sujets étaient soumis à une suppressionaléatoire de l’information visuelle de localisation de main. Or nous avonsvu l’élément important apporté par Zelaznik
et al.
(1983) concernantl’incertitude quant à la disponibilité de l’information visuelle pendant lemouvement. Les sujets ont semblé se préparer à agir sans vision (stratégie« par défaut »), ce qui pourrait nuire à un traitement optimal de l’infor-mation visuelle. D’autre part, une mesure de la performance par uneévaluation du nombre de contacts réalisés avec la cible [donnant lieu àun % de réussite, utilisé par Keele et Posner (1968) notamment] estmoins sensible qu’une mesure d’exactitude ou de variabilité de la réponsemotrice (Zelaznik
et al.
, 1983 ; Bard et al., 1985) ou qu’une analyse ciné-matique détaillée (Carlton, 1981 ; Prablanc & Martin, 1992 ; Blouin
et al.,
1993b). Cependant, la conclusion des résultats présentés est que la limitetemporelle empêchant tout contrôle rétroactif visuel est inférieure à ce
07_Sarlegna.fm Page 323 Mercredi, 18. avril 2007 2:29 14

324
Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
qui a été initialement pensé. La valeur de 100-150 ms de délai visuo-moteur représente alors un argument de poids pour renforcer l’hypothèsed’un contrôle en ligne efficace sur la base des informations visuelles delocalisation de main. Nous tâcherons maintenant de montrer que la dis-tinction de deux systèmes visuels, associée à la dualité amplitude/direction, pourrait être à la source de certains résultats contradictoires.
Spécificité des informations visuelles centrales et périphériques
Les résultats expérimentaux que nous venons de présenter sont pour laplupart basés sur l’idée que les informations visuelles sont traitées àtravers un canal unique. Or de nombreuses études ont montré l’interven-tion différenciée des systèmes visuels centraux et périphériques, enfonction de leurs caractéristiques anatomo-physiologiques (Blouin
et al.
,1993b ; Paillard, 1996). La rétine périphérique est sensible au mouvementde l’image de la main projetée sur la rétine pendant le mouvement. Elleest donc apte à fournir au SNC une information sur la direction du mou-vement. Du fait que le regard est généralement dirigé sur la cible pendantl’intégralité du mouvement, la main est généralement vue en vision péri-phérique (qui a une haute résolution temporelle) durant la premièrepartie du mouvement où la vitesse est élevée. Bard
et al.
(1985) etBlouin
et al.
(1993b) ont observé une meilleure précision directionnellede mouvements très rapides (110 ms), non contraints en ce qui concerneleur amplitude, lorsque les sujets voyaient seulement la portion initiale deleur mouvement par rapport à lorsqu’ils n’avaient aucun retour visuel dela trajectoire de la main. En fait, la précision directionnelle des mouve-ments avec vision de la portion initiale du mouvement était similaire àcelle obtenue lorsque la trajectoire entière était visible. Ces résultats ren-forcent donc l’hypothèse d’un contrôle directionnel efficace sur la basedes boucles visuelles périphériques puisque la partie initiale des mouve-ments était perçue en vision périphérique. Bien que Temprado
et al.
(1996) aient montré que la portion « extrêmement » périphérique duchamp visuel située entre 60 et 40° ne permettait pas de contrôler en lignela direction de mouvements de bras, Proteau et collaborateurs ontconfirmé la contribution du système visuel périphérique au contrôlerapide de la direction du mouvement, et ce pour une large gamme devitesses de mouvement et que les conditions de vision soient monoculaireou binoculaire (e.g., Proteau
et al
. 2000).À l’inverse d’un contrôle directionnel précoce, l’amplitude d’un mouve-ment semble être contrôlée plus tard dans le mouvement. Van derMeulen, Gooskens, Denier van der Gon, Gielen et Wilhelm (1990) ontutilisé une tâche sans aucune composante directionnelle (seule l’amplitudedu mouvement était à contrôler) et n’ont pas observé d’effet de la vision
07_Sarlegna.fm Page 324 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement
325
L’année psychologique, 2007, 107, 303-336
de la main pendant la première portion du mouvement sur les paramè-tres cinématiques de la phase d’accélération. La spécificité de la tâcheutilisée n’a sans doute pas permis d’observer des bénéfices visuels pour laphase initiale des mouvements. De plus, Bard
et al.
(1990) ont mis en évi-dence le rôle important de la vision centrale pour le contrôle del’amplitude. Parce que l’image de la main ne se projette sur la partie cen-trale de la rétine que lorsque la main est proche de la cible, c’est-à-direvers la fin du mouvement, l’amplitude du mouvement semble êtrecontrôlée sur la base des informations visuelles plus tard que la direction.Il est à noter que dans cette phase terminale, la direction du mouvementpeut également être corrigée.Les éléments cités permettent-ils d’expliquer certaines contradictions sur lecontrôle visuel des mouvements ? Carlton (1981) et Beaubaton et Hay(1986) n’avaient pas observé de contribution de la vision de la portion ini-tiale du mouvement. Ces derniers ont cependant utilisé des méthodologiesd’analyse des résultats (« touché ou manqué » pour Carlton, mesured’erreur totale ne permettant pas d’étudier spécifiquement amplitude etdirection pour Beaubaton et Hay) qui ne permettaient pas de distinguerl’apport spécifique de la portion initiale du mouvement au contrôle direc-tionnel du mouvement. On peut noter que si Elliott et Allard (1985)n’avaient analysé que les erreurs en amplitude, ils n’auraient pas puobserver de différences de précision entre conditions de vision et nonvision. Seule l’analyse des erreurs directionnelles leur a permis de mettreen évidence l’efficacité des boucles de rétrocontrôle visuel pour optimiserla précision des mouvements rapides. Les contributions spécifiques desinformations visuelles centrales et périphériques au contrôle de l’ampli-tude et de la direction ont donc été mises en évidence dans de maintesétudes, mais elles demeurent largement débattues actuellement (Khan etal., 2004 ; Sarlegna et al., 2003, 2004 ; Saunders & Knill, 2005).
VISION ET PROPRIOCEPTION DANS LE CONTRÔLE EN LIGNE DU MOUVEMENT
La position de la main peut être déterminée grâce à la proprioception et lavision, ce qui amène à la question de savoir comment le SNC combinedes informations provenant de différentes sources pour diriger un mou-vement vers une cible (Graziano, Cooke & Taylor, 2000 ; Scott, 2004). Lacompréhension de l’intégration multi-sensorielle est d’une importance
07_Sarlegna.fm Page 325 Mercredi, 18. avril 2007 2:29 14

326 Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
fondamentale car dans la vie de tous les jours, il y a une abondanced’informations provenant de divers sens que le SNC doit continuellementutiliser pour créer une représentation unique et cohérente du corps et del’espace. De nombreuses études ont suggéré une dominance de la visionsur la proprioception lorsque ces deux sens étaient disponibles simultané-ment. Ainsi, dans l’étude de Saunders et Knill (2005), les sujets ont utiliséen ligne l’information visuelle de la main pour corriger la perturbationvisuelle induite, « négligeant » quelque peu l’information proprioceptivequi devrait différer. Ces résultats, ainsi que ceux d’Elliott et Allard (1985),tendent donc à renforcer la notion de capture visuelle (Hay, Pick & Ikeda,1965 ; Rock & Harris, 1967). Toutefois, comme le fait remarquer Paillard(1986, p. 177), il serait certainement peu raisonnable de considérerl’extrême subtilité d’organisation du système proprioceptif comme unluxe sans utilité réelle.Certaines études ont suggéré que lorsque vision et proprioception sontdisponibles pour localiser la main pendant le mouvement, la propriocep-tion pourrait être utilisée prioritairement car le sens de la position et dumouvement est toujours disponible, contrairement à la vision qui dépenddes conditions environnementales. Dans une expérience de Prablanc etMartin (1992) où les sujets devaient réaliser la tâche avec ou sans visionde la main, la cible pouvait être déplacée aléatoirement au début du mou-vement de bras. Les auteurs n’ont pas observé de différence significativeentre les latences d’apparition des premières modifications de trajectoire.Dans une étude subséquente, Prablanc et collaborateurs ont proposé quele contrôle en ligne des mouvements de bras était indépendant des affé-rences visuelles sur la localisation de la main en mouvement (Komilis,Pélisson & Prablanc, 1993 ; p. 299). Pour ce groupe d’auteurs, le contrôlecourant du mouvement serait donc principalement effectué sur la basedes informations proprioceptives et/ou efférentes (Goodale, Pélisson &Prablanc, 1986).Nous (Sarlegna et al., 2004) avons souhaité étudier les contributions desinformations visuelles et proprioceptives dans le contrôle en ligne desmouvements d’atteinte manuelle en utilisant une nouvelle méthodologie.Nous avons tâché de prendre en compte le fait que lorsque des ajuste-ments sont produits en réponse à une perturbation perçue, ils peuventvarier en fonction de processus dits de haut niveau (Poulton, 1981 ; Zela-znik et al., 1983 ; Elliott & Allard, 1985). S’inspirant des études où unemodification de la position vue de la cible était réalisée pendant la saccadeoculaire pour que cette perturbation ne soit pas consciemment perçue (e.g.Bridgeman, Lewis, Heit & Nagle, 1979 ; Goodale et al., 1986 ; Prablanc& Martin, 1992), des modifications de la position vue de la main ont été
07_Sarlegna.fm Page 326 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement 327
L’année psychologique, 2007, 107, 303-336
réalisées de façon similaire, juste avant le début du mouvement (Sar-legna et al., 2004 ; figure 4). Nous avons ainsi pu analyser comment le sujetutilisait les informations visuelles et proprioceptives permettant de localiserla main pour contrôler ses rapides mouvements. Dans notre expérience oùseule la direction du mouvement était à contrôler, l’information visuelle aété utilisée de manière consistante et significative pour que la trajectoiredu mouvement soit ajustée en ligne, de façon à amener la diode représen-tant la main plus près de la cible visuelle. Toutefois, l’information visuelle
Figure 4. Au début de l’essai, la diode centrale représentant la main dansl’obscurité est allumée. Elle peut être éteinte juste avant le début du mouve-ment, alors qu’une diode latérale est allumée. Dans ce cas, le sujet dévie satrajectoire en ligne pour rapprocher la diode allumée de la cible.Figure 4. At the beginning of each trial, the central diode representing hand positionin darkness is illuminated. It can be turned off close to movement onset, while thelateral diode is lit on. In such a case, the subject adjusts online movement trajectoryto bring the left diode closer to the target.
07_Sarlegna.fm Page 327 Mercredi, 18. avril 2007 2:29 14

328 Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
n’a pas été utilisée « complètement » et nos analyses suggèrent fortementque le sens proprioceptif (et/ou de l’effort) a également contribué de façonsignificative au contrôle du mouvement. Nos résultats suggèrent donc quela localisation de main a été déterminée par combinaison des informationsvisuelles et proprioceptives pour n’obtenir qu’une représentation unitaire.Le fait que les poids de la vision et de la proprioception aient été respecti-vement de 45 et 55 % suggère que s’il y a une pondération concernant lesdifférentes sources sensorielles de localisation de la main, cette pondéra-tion est très faible. Cette étude a donc permis de mettre en évidence lacapacité du SNC à intégrer rapidement et précisément les informationsvisuelles et proprioceptives sur la localisation de la main pour contrôler enligne les rapides mouvements de pointage.Concernant le processus de localisation de la main, on peut tout de mêmese poser les questions de savoir (i) comment peut-on contrôler en ligneun mouvement sur la base d’afférences sensorielles périphériques que leSNC reçoit avec un délai certes réduit mais non nul, (ii) commentpeuvent être combinées les informations visuelles et proprioceptives (etefférentes) si les latences des boucles de rétroaction ne sont pas stricte-ment égales. Ainsi, pour une main à une position à un instant t donnédurant un mouvement, le SNC ne reçoit l’information proprioceptive delocalisation de main qu’après un délai dp. Selon le même raisonnement,le SNC reçoit l’information visuelle avec un délai dv. Si dv et dp sont stric-tement égaux, alors le SNC peut réaliser une combinaison cohérente dedeux informations de localisation de la main à l’instant t. On peut notercependant que dans le cas de modifications de trajectoire à produire, leSNC va devoir envoyer des commandes motrices sur la base d’informa-tions ne donnant pas la localisation de la main au moment où lescommandes motrices vont être générées. Il est possible que ces modifica-tions soient donc élaborées sur la base d’une prédiction de la position oùsera la main lorsque ces commandes motrices vont commencer às’exprimer. C’est ce que suggère l’étude de Sarlegna et al. (2006) où lessujets contrôles ont réalisé des ajustements directs vers la cible déplacée.Le problème semble se compliquer encore un peu plus si les les délais dvet dp sont différents. Faisons l’hypothèse que dp est plus court que dv.Dans ce cas, le SNC reçoit à un certain moment m des informationsdatant de m – dv dans le cas d’informations visuelles et datant de m – dppour des informations proprioceptives. Le SNC recevrait donc en mêmetemps des informations de localisation de main n’ayant pas été prélevéesau même instant. Une proposition de solution à ce problème pourraitêtre inférée de l’article de Miall et al. (1993), selon lequel un modèleinterne du système moteur pourrait, grâce notamment à la connaissance
07_Sarlegna.fm Page 328 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement 329
L’année psychologique, 2007, 107, 303-336
de tels délais, permettre la combinaison d’informations différant de parleurs caractéristiques temporelles (e.g. informations afférentes et copied’efférence). Ces considérations renforcent l’hypothèse du modèle internequi serait capable de réaliser de nombreuses prédictions, estimations etautres simulations.
CONCLUSION
Les études présentées montrent que les informations efférentes et affé-rentes (visuelles et proprioceptives) relatives à la localisation de la main etde la cible contribuent au contrôle en ligne des mouvements de bras. LeSNC est capable de prendre en compte des modifications arrivantpendant le temps de préparation d’un mouvement en direction d’unecible (Georgopoulos et al., 1981 ; Soechting & Lacquaniti, 1983) ainsi quependant la réalisation du mouvement. Dans ce cas, des perturbationsperçues grâce au sens proprioceptif peuvent être compensées rapidement(Cordo, 1990 ; Coello et al., 1996 ; Gottlieb, 1996). Lorsque la perturba-tion est détectée visuellement, qu’elle concerne la main (Sarlegna et al.,2004 ; Saunders & Knill, 2005) ou la cible (Boulinguez & Nougier, 1999 ;Prablanc & Martin, 1992 ; Sarlegna et al., 2003), elle est généralementprise en compte rapidement. Le SNC est donc informé de façon trèsrapide (ce qui devrait impliquer à la fois échantillonnage à haute fré-quence, conduction et traitement optimal de l’information) sur l’état del’organisme et de l’environnement pour que le comportement moteursoit le plus adapté à la situation. Ceci amène à penser que les boucles derétroaction sont toujours présentes et actives pour un contrôle optimal denos mouvements.Les observations que nous avons présentées démontrent également que lareprésentation du corps est par essence un mécanisme pluri-modalitaire.Les informations visuelles et proprioceptives semblent être continuelle-ment utilisées pour comparer en ligne positions de main et de cible etainsi produire des ajustements fins de trajectoire. Ces mises à jour conti-nues des représentations internes des positions de main et de ciblepeuvent être clairement observées dans les cas où des perturbations sontdéclenchées par l’expérimentateur. Toutefois, soulignons que le contrôleen ligne du mouvement est toujours présent, même s’il n’y a pas de perturbation,comme le soulignent Desmurget et collaborateurs dans un récent article(2005). Des perturbations sont simplement utilisées expérimentalement
07_Sarlegna.fm Page 329 Mercredi, 18. avril 2007 2:29 14

330 Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
pour mieux mettre en évidence les boucles de contrôle courant du mou-vement. De tels ajustements continuels sont particulièrement utiles pourcorriger les possibles erreurs de localisation de cible, de programmationou d’exécution surtout si, comme Schmidt et al. (1979) l’ont suggéré, lessignaux nerveux sont bruités.Un plan moteur serait donc défini pour initier un mouvement, et lesinformations afférentes et efférentes seraient prises en compte à chaqueinstant pour affiner continuellement ce plan moteur. Dans ce cadred’idée, deux informations valent évidemment mieux qu’une, mais cetteaffirmation qui semble triviale est confirmée notamment par une récenteétude de van Beers et al. (1999), montrant que la combinaison des infor-mations visuelles et proprioceptives vaut mieux que la somme des deux.Les récents résultats de Sainburg et al. (2003) indiquent que vision et pro-prioception seraient spécifiquement combinées pour la planification del’amplitude et la direction des mouvements. Nos résultats montrent éga-lement que la combinaison de ces informations sensorielles est spécifiquepour le contrôle en ligne de l’amplitude et la direction des mouvements.En effet, nous avons récemment comparé les contributions des informa-tions visuelles de la cible et de la main au contrôle courant dumouvement (Sarlegna et al., 2003). Nous avons observé que ces deuxinformations visuelles, qui conceptuellement auraient pu être traitées dela même façon, étaient en fait utilisées très différemment, un résultatqu’ont récemment confirmé Diedrichsen et collaborateurs (2005). Danscette tâche où les participants devaient essentiellement contrôler l’ampli-tude de leur mouvement, l’information visuelle de la main n’a quasimentpas été utilisée en ligne puisque les sujets ont peu ou pas modifié l’ampli-tude de leur mouvement en fonction de la perturbation de l’informationvisuelle de la main. Par contre, lorsque la cible était déplacée, l’informa-tion visuelle de la cible a été largement utilisée puisque les sujets ontmodifié en ligne le mouvement de la main.Dans une seconde étude (Sarlegna et al., 2004) où seule la direction dumouvement était à contrôler, les informations visuelles (et proprioceptives)de localisation de main ont pu être utilisées pour réaliser d’importantsajustements de la direction du mouvement. Ces résultats diffèrent de ceuxde l’étude précédente où l’amplitude était à contrôler (Sarlegna et al.,2003) et ou les informations visuelles de la main n’avaient pas ou peu étéutilisées pour modifier l’amplitude du mouvement. Ces deux études sug-gèrent donc que le fait de devoir contrôler l’amplitude du mouvement aempêché d’observer des modifications en ligne du mouvement sur la basede la vision de la main. De nombreuses études ont mis en évidence desmodes de contrôle différents pour l’amplitude et la direction du mouvement.
07_Sarlegna.fm Page 330 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement 331
L’année psychologique, 2007, 107, 303-336
L’ensemble de ces observations tend à renforcer l’hypothèse d’un codagevectoriel du mouvement, c’est-à-dire que le mouvement serait représentéau sein du SNC selon une direction, une amplitude, et une positiond’origine.La mise en évidence de l’utilisation des informations de localisation demain pour le contrôle du mouvement semble également être un élémentsoutenant la théorie du codage vectoriel. En effet, comme Rossetti, Des-murget et Prablanc (1995) ou Sainburg et al. (2003) avaient utilisél’argument que si une manipulation de la localisation initiale de la mainaffecte la précision finale du mouvement, l’hypothèse du codage vectorielest confirmée, les résultats montrant que les informations de localisationde main influencent la trajectoire du mouvement appuient donc cettemême hypothèse. Il est cependant possible que le codage vectoriel et lecodage de la position finale, l’hypothèse opposée, représentent deux stra-tégies non exclusives utilisées par le SNC, expliquant par là les preuvesexpérimentales renforçant chacun de ces courants influents de pensée. Unimportant défi pour l’avenir sera d’identifier les conditions de mise enœuvre des modes de contrôle de la trajectoire et de la position finale dumouvement.Concernant le contrôle en ligne de la trajectoire du mouvement, l’obser-vation répétée du fait que des ajustements moteurs peuvent être produitsen réponse à des perturbations non consciemment perçues témoigne de lacapacité du SNC à contrôler le mouvement indépendamment de la prisede conscience d’une erreur motrice. Ceci démontre l’existence d’un contrôleen temps réel, automatique, des mouvements d’atteinte manuelle dirigésvers une cible visuelle, sur la base d’informations sensorielles périphéri-ques. Un commentaire peut alors être porté sur la méthode d’isolation.Lorsqu’une modalité sensorielle n’est pas disponible pour quelque raisonque ce soit, le SNC utilise toute autre information disponible de façon àcompenser ce manque d’information. Ainsi, lorsqu’il ne nous est paspossible de voir (par exemple, dans la nuit noire, ou dans le cas de per-sonnes aveugles), il y a de fortes chances que le contrôle du mouvementrepose sur les mécanismes centraux et les boucles de rétroaction proprio-ceptives. Ceci indique que la méthode d’isolation ne semble pas être lameilleure des méthodes pour analyser le rôle d’une fonction (pour unediscussion plus détaillée, voir Cruse et al., 1990). Il a ainsi pu être observéque supprimer la vision pendant un mouvement ne résultait pas forcé-ment en une augmentation d’erreurs. De tels résultats expérimentaux ontlaissé supposer une contribution peu importante des signaux visuels relatifs àla localisation de la main pour le contrôle en ligne des mouvements rapides.La méthode de perturbation semble être plus à même de renseigner sur le
07_Sarlegna.fm Page 331 Mercredi, 18. avril 2007 2:29 14

332 Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
rôle d’une fonction et a permis de mettre en évidence le rôle des bouclesvisuelles sur la localisation de la main, en combinaison avec les signauxproprioceptifs et/ou efférents (Sarlegna et al., 2004).Concernant le processus de localisation de la main, des questions demeu-rent sans réponse claire à ce jour. Comment peut-on contrôler en ligneun mouvement sur la base d’afférences sensorielles périphériques que leSNC reçoit avec un délai certes réduit mais non nul ? Comment peuventêtre combinées les informations visuelles et proprioceptives (et efférentes)si les latences des boucles afférentes ne sont pas strictement égales ? Nousavons vu que le concept de modèle interne a été proposé et semble per-mettre de répondre à ce problème, mais il sera difficile d’en démontrerl’existence, même si le réseau de neurones formé par le complexe pariéto-cérebelleux semble avoir un rôle comparable à ce modèle interne (Miall etal., 1993 ; Vercher et al., 2003 ; Scott, 2004 ; Diedrichsen et al., 2005).
BIBLIOGRAPHIE
Adams, J. A. (1971). A closed-loop theoryof motor learning, Journal of Motor Beha-vior, 3, 111-149.
Ariff, G., Donchin, O., Nanayakkara, T., &Shadmehr, R. (2002). A real-time state pre-dictor in motor control : study of saccadiceye movements during unseen reachingmovements. Journal of Neuroscience, 22,7721-7729.
Bard, C., Hay, L., & Fleury, M. (1985). Roleof peripheral vision in the directional controlof rapid aiming movements. Canadian Jour-nal of Experimental Psychology, 39, 151-161.
Bard, C., Paillard, J., Fleury, M., Hay, L., &Larue, J. (1990). Positional versus directio-nal control loops in visuomotor pointing.Cahiers de Psychologie Cognitive/EuropeanJournal of Cognition and Psychology, 10,145-156.
Bard, C., Turrell, Y., Fleury, M., Teas-dale, N., Lamarre, Y., & Martin, O. (1999).Deafferentation and pointing with visualdouble step perturbations. ExperimentalBrain Research, 125, 410-416.
Beaubaton, D., & Hay, L. (1986). Contri-bution of visual information to feed-forward and feedback processes in rapidpointing movements. Human MovementScience, 5, 19-34.
Becker, W., & Fuchs, A. F. (1969). Furtherproperties of the human saccadic system :eye movements and correction saccadeswith and without visual fixation points. Vi-sion Research, 9, 1247-1258.
Beggs, W. D., & Howarth, C. I. (1970).Movement control in a repetitive motortask. Nature, 225, 752-753.
Bernstein, N. (1967). The coordination andregulation of movements. Oxford : Perga-mon Press.
Berthoz, A. (1997). Le sens du mouvement.Paris : Odile Jacob.
Blouin, J., Bard, C., Teasdale, N., Paillard, J.,Fleury, M., Forget, R., & Lamarre, Y. (1993a).Reference systems for coding spatial infor-mation in normal subjects and a deafferen-ted patient. Experimental Brain Research,93, 324-331.
07_Sarlegna.fm Page 332 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement 333
L’année psychologique, 2007, 107, 303-336
Blouin, J., Teasdale, N., Bard, C., & Fleury,M. (1993b). Directional control of rapidarm movements : the role of the kinetic vi-sual feedback system. Canadian Journal ofExperimental Psychology, 47, 678-696.
Boulinguez, P., & Nougier, V. (1999).Control of goal-directed movements : thecontribution of orienting of visual atten-tion and motor preparation. Acta Psycholo-gica, 103, 21-45.
Bourdin, C., Gauthier, G. M., Blouin, J., &Vercher, J. L. (2001). Visual feedback of themoving arm allows complete adaptation ofpointing movements to centrifugal andCoriolis forces. Neuroscience Letters, 301,25-28.
Bridgeman, B., Lewis, S., Heit, G., & Nagle,M. (1979). Relation between cognitive andmotor-oriented systems of visual positionperception. Journal of Experimental Psycho-logy : Human Perception and Performance,5, 692-700.
Brown, S.H., & Cooke, J. D. (1981). Res-ponses to force perturbations precedingvoluntary human arm movements. BrainResearch, 220, 350-355.
Capaday, C., & Cooke, J. D. (1981). The ef-fects of muscle vibration on the attainmentof intended final position during voluntaryhuman arm movements. ExperimentalBrain Research, 42, 228-230.
Carlton, L. G. (1981). Processing visualfeedback information for movementcontrol. Journal of Experimental Psycho-logy, 7, 1019-1030.
Carlton, L. G. (1992). Visual processingtime and the control of movement. InL. Proteau, D. Elliott (Eds.), Vision andMotor Control. New York : Elsevier SciencePublishers.
Coello, Y., Orliaguet, J. P., & Prablanc,C. (1996). Pointing movement in an artifi-cial perturbing inertial field : a prospectiveparadigm for motor control study. Neurop-sychologia, 34, 879-892.
Cole, J. D. (1998). Rehabilitation after sen-sory neuronopathy syndrome. Journal ofRoyal Society of Medicine, 91, 30-32.
Conti, P., & Beaubaton, D. (1976). Utilisa-tion des informations visuelles dans lecontrôle du mouvement : étude de laprécision des pointages chez l’homme. LeTravail Humain, 39, 19-32.
Cooke, J. D., & Diggles, V. A. (1984). Rapiderror correction during human arm move-ments : evidence for central monitoring.Journal of Motor Behavior, 16, 348-363.
Cordo, P. J. (1990). Kinesthetic control ofa multijoint movement sequence. Journalof Neurophysiology, 63, 161-172.
Cordo, P., Carlton, L., Bevan, L., Carlton, M.,& Kerr, G. K. (1994). Proprioceptive coor-dination of movement sequences : role ofvelocity and position information. Journalof Neurophysiology, 71, 1848-1861.
Crago, P. E., Houk, J. C., & Hasan, Z.(1976). Regulatory actions of humanstretch reflex. Journal of Neurophysiology,39, 925-935.
Craske, B. (1977). Perception of impossiblelimb positions induced by tendon vibra-tion. Science, 1, 71-73.
Cruse, H., Dean, J., Heuer, H., & Scmidt, R.A. (1990). Utilization of sensory informationfor motor control. In O. Neumann &W. Prinz (Eds.), Relationships between percep-tion and action. Berlin : Springer-Verlag.
Danion, F. (2004). How dependent are gripforce and arm actions during holding anobject ? Experimental Brain Research, 158,109-119.
Desmurget, M., & Grafton, S. T. (2000).Forward modeling allows feedback controlfor fast reaching movements. Trends in Co-gnitive Science, 4, 423-431.
Desmurget, M., Pélisson, D., Rossetti, Y.,& Prablanc, C. (1998). From eye to hand :Planning goal-directed movements. Neuros-cience Biobehavioral Review, 22, 761-788.
Diedrichsen, J., Hashambhoy, Y., Rane, T.,& Shadmehr, R. (2005). Neural correlatesof reach errors. Journal of Neuroscience, 25,9919-9931.
Elliott, D., & Allard, F. (1985). The utiliza-tion of visual feedback information during
07_Sarlegna.fm Page 333 Mercredi, 18. avril 2007 2:29 14

334 Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
rapid pointing movements. Quarterly Jour-nal of Experimental Psychology, 37, 407-425.
Elliott, D., Heath, M., Binsted, G., Ricker,K. L., Roy, E. A., & Chua, R. (1999). Goal-directed aiming : correcting a force-speci-fication error with the right and left hands.Journal of Motor Behavior, 31, 309-324.
Fitts, P. M. (1954). The information capa-city of the humn motor system in control-ling the amplitude of movement. Journal ofExperimental Psychology, 47, 381-391.
Fourneret, P., Jeannerod, M. (1998). Limitedconscious monitoring of motor performancein normal subjects. Neuropsychologia, 36,1133-1140.
Gandevia, S. C., Smith, J. L., Crawford, M.,Proske, U., & Taylor, J. L. (2006). Motorcommands contribute to human positionsense. Journal of Physiology, 571, 703-710.
Garrett, J. B., & Wallace, B. (1975). A noveltest of hypnotic anesthesia. InternationalJournal of Clinical Experimental Hypnose,23, 139-149.
Gauthier, G. M., & Mussa-Ivaldi, F. (1988).Oculo-manual tracking of visual targets inmonkeys : role of the arm afferent informa-tion in the control of arm and eye move-ments. Experimental Brain Research, 73,138-154.
Georgopoulos, A. P., Kalaska, J. F., Massey,J. T. (1981). Spatial trajectories and reac-tion times of aimed movements : effects ofpractice, uncertainty, and change in targetlocation. Journal of Neurophysiology, 4,725-743.
Gilhodes, J. C., Roll, J. P., & Tardy-Gervet,M. F. (1986). Perceptual and motor effects ofagonist-antagonist muscle vibration in man.Experimental Brain Research, 61, 395-402.
Ghez, C., Gordon, J., & Ghilardi, M. F.(1995). Impairments of reaching move-ments in patients without proprioception.II. Effects of visual information on accuracy.Journal of Neurophysiology, 73, 361-372.
Goodale, M. A., Pélisson, D., & Prablanc,C. (1986). Large adjustments in visuallyguided reaching do not depend on vision
of the hand and perception of target displa-cement. Nature, 320, 748-750.
Gordon, J., & Ghez, C. (1987). Trajectorycontrol in targeted force impulses. III.Compensatory adjustments for initial er-rors. Experimental Brain Research, 67, 253-269.
Gottlieb, G. L. (1996). On the voluntarymovement of compliant (inertial-viscoe-lastic) loads by parcellated control mecha-nisms. Journal of Neurophysiology, 76,3207-3229.
Graziano, M. S., Cooke, D. F., & Taylor, C.S. (2000). Coding the location of the armby sight. Science, 290, 1782-1786.
Hasan, Z. (2005). The human motorcontrol system’s response to mechanicalperturbation : should it, can it, and does itensure stability ? Journal of Motor Behavior,37, 484-493.
Hay, J. C., Pick, H. L., & Ikeda, K. (1965).Visual capture produced by prism specta-cles. Psychonomic Science, 2, 215-216.
Hay, L., & Beaubaton, D. (1986). Visualcorrection of a rapid goal-directed response.Perceptual and Motor Skills, 62, 51-57.
Helmholtz, H., von (1866). Treatise onPhysiological Optics, Volume 3. New York :Optical Society of America.
Higgins, J. R, & Angel, R. W. (1970). Cor-rection of tracking errors without sensoryfeedback. Journal of Experimental Psycho-logy, 84, 412-416.
Hugon, M., Massion, J., & Wiesendanger,M. (1982). Anticipatory postural changesinduced by active unloading and compari-son with passive unloading in man. PfügersArch, 393, 292-296.
Jeannerod, M. (1988). The neural and be-havioural organization of goal-directed mo-vements. Oxford : Clarendon Press/OxfordUniversity Press.
Keele, S. W. (1968). Movement control inskilled motor performance. Psychology Bul-letin, 70, 387-403.
Keele, S. W., & Posner, M. I. (1968). Pro-cessing of visual feedback in rapid move-
07_Sarlegna.fm Page 334 Mercredi, 18. avril 2007 2:29 14

Vision, proprioception et contrôle en ligne du mouvement 335
L’année psychologique, 2007, 107, 303-336
ments. Journal of Experimental Psychology,77, 155-158.
Khan, M. A., Lawrence, G. P., Franks,I. M., & Buckolz, E. (2004). The utilizationof visual feedback from peripheral and cen-tral vision in the control of direction, Ex-perimental Brain Research, 158, 241–251.
Komilis, E., Pélisson, D., & Prablanc, C.(1993). Error processing in pointing at ran-domly feedback-induced double-step sti-muli. Journal of Motor Behavior, 25, 299-308.
Massion, J. (1997). Cerveau et motricité.Paris, PUF.
Messier, J., Adamovich, Berkinblit, Tunik,& Poizner, (2003). Influence of movementspeed on accuracy and coordination of rea-ching movements to memorized targets inthree-dimensional space in a deafferentedsubject. Experimental Brain Research, 150,399-416.
Miall, R. C., Weir, D. J., Wolpert,D. M., & Stein, J. F. (1993). Is the cerebel-lum a Smith predictor ? Journal of MotorBehavior, 25, 203-216.
Newell, K. M., & Houk, J. C. (1983) Speedand accuracy of compensatory responses tolimb disturbances. Journal of ExperimentalPsychology : Human Perception and Perfor-mance, 9, 58-74.
Nougier, V., Bard, C., Fleury, M., Teas-dale, N., Cole, J., Forget, R., Paillard, J., La-marre, Y. (1996). Control of single-jointmovements in deafferented patients :evidence for amplitude coding rather thanposition control. Experimental Brain Re-search, 109, 473-482.
Paillard, J. (1986). Itinéraire pour une psy-chophysiologie de l’action. Paris : Actio.
Paillard, J. (1996). Fast and slow feedbackloops for the visual correction of spatialerrors in a pointing task : a reappraisal.Canadian Journal of Physiology and Phar-macology, 74, 401-417.
Pearson, K. G. (2001). Proprioceptive sen-sory feedback. In Encyclopedia of Life Scien-ces. Nature Publishing Group.
Poulton, E. C. (1981). Human manualcontrol. In V. B. Brooks (Ed.) Handbook ofphysiology, Section 1. The nervous system,vol 2, Motor control. Bethesda : AmericanPhysiological Society.
Prablanc, C., & Martin, O. (1992). Auto-matic control during hand reaching atundetected two-dimensional target displa-cements. Journal of Neurophysiology, 67,455-469.
Proteau, L., Boivin, K., Linossier, S., &Abahnini, K. (2000). Exploring the limitsof peripheral vision for the control ofmovement. Journal of Motor Behavior,32, 277-286.
Redon, C., Hay, L., & Velay, J-L. (1991).Proprioceptive control of goal-directedmovements in Man, studied by means ofvibratory muscle tendon stimulation. Jour-nal of Motor Behavior, 23, 101-108.
Rock, I., & Harris, C. S. (1967). Vision andtouch. Scientific American, 216, 96-104.
Rossetti, Y., Desmurget, M., & Prablanc,C. (1995). Vectorial coding of movement :vision, proprioception, or both ? Journal ofNeurophysiology, 74, 457-463.
Sainburg, R. L., Ghilardi, M. F., Poi-zner, H., & Ghez, C. (1995). Control oflimb dynamics in normal subjects and pa-tients without proprioception. Journal ofNeurophysiology, 73, 820-835.
Sainburg, R. L., Lateiner, J. E., Latash,M. L., & Bagesteiro, L. B. (2003). Effects ofaltering initial position on movement di-rection and extent. Journal of Neurophysio-logy, 89, 401-415.
Sarlegna, F., Blouin, J., Bresciani, J-P.,Bourdin, C., Vercher, J.-L., & Gauthier G. M.(2003). Target and hand position informa-tion in the online control of goal-directedarm movement. Experimental Brain Research,151, 524-535.
Sarlegna, F., Blouin, J., Vercher, J-L., Bres-ciani, J-P., Bourdin, C., & Gauthier, G.M. (2004). Online control of the directionof rapid reaching movements. Experimen-tal Brain Research, 157, 468-471.
07_Sarlegna.fm Page 335 Mercredi, 18. avril 2007 2:29 14

336 Fabrice Sarlegna
L’année psychologique, 2007, 107, 303-336
Sarlegna, F., Gauthier, G. M., Bourdin, C.,Vercher, J.-L., & Blouin, J. (2006). Internally-driven control of reaching movements : astudy on a proprioceptively deafferentedsubject. Brain Research Bulletin, 69 (4),404-415.
Saunders, J. A., & Knill, D. C. (2005). Hu-mans use continuous visual feedback fromthe hand to control both the direction anddistance of pointing movements. Experi-mental Brain Research, 162, 458-473.
Schmidt, R. A., & Lee, T. D. (1999). Motorcontrol and learning : A Behavioral Empha-sis. Champaign : IL.
Schmidt, R. A., Zelaznik, H., Hawkins, B.,Frank, J. S., & Quinn, J. T. (1979). Motor-output variability : a theory for the accu-racy of rapid motor acts. Psychological Re-view, 86, 415-451.
Scott, S. H. (2004). Optimal feedbackcontrol and the neural basis of volitionalmotor control. Nature Review Neuroscience,5, 532-546.
Sherrington, C. S. (1939). Selected writingsof Sir Charles Sherrington. Denny-Brown :Oxford Medical Publications.
Simoneau, M., Paillard, J., Bard, C., Teas-dale, N., Martin, O., Fleury, M., & La-marre, Y. (1999). Role of the feedforwardcommand and reafferent information inthe coordination of a passing prehensiontask. Experimental Brain Research, 128,236-242.
Sittig, A. C., Denier van der Gon, J. J.,& Gielen, C. C. A. M. (1987). The contri-bution of afferent information on positionand velocity to the control of slow and fasthuman forearm movements. ExperimentalBrain Research, 67, 33-40.
Smith, W. M., & Bowen, K. F. (1980). Theeffect of delayed and displaced visual feed-back on motor control. Journal of MotorBehavior, 12, 91-101.
Soechting, J. F., & Lacquaniti, F. (1983).Modification of trajectory of a pointingmovement in response to a change in targetlocation. Journal of Neurophysiology, 49,548-564.
Sperry, R. W. (1950). Neural basis of thespontaneous optokinetic response produ-ced by visual inversion. Journal of Psycho-logy and Physiology, 43, 482-89.
Temprado, J. J., Vieilledent, S., & Proteau, L.(1996). Afferent information for motorcontrol : The role of visual information indifferent portions of the movement. Jour-nal of Motor Behavior, 28, 280-287.
van Beers, R. J., Baraduc, P., & Wolpert, D. M.(2002). Role of uncertainty in sensorimo-tor control. Philosophical Transcripts of theRoyal Society of London Biological Sciences,357, 1137-1145.
van Beers, R. J., Sittig, A. C., Denier van derGon, J. J. (1999). Integration of proprio-ceptive and visual position-information :An experimentally supported model. Jour-nal of Neurophysiology, 81, 1355-1364.
van der Meulen, J. H., Gooskens, R. H.,Denier van der Gon, J. J., Gielen, C. C.,& Wilhelm, K. (1990). Mechanisms under-lying accuracy in fast goal-directed armmovements in man. Journal of Motor Beha-vior, 22, 67-84.
Vercher, J. L., Sares, F., Blouin, J., Bour-din, C., & Gauthier, G. M. (2003). Role ofsensory information in updating internalmodels of the effector during arm tracking.Progress in Brain Research, 142, 203-222.
Vince, M. A. (1948). Corrective move-ments in a pursuit task. Quarterly Journalof Experimental Psychology, 1, 85-106.
von Holst, H., & Mittelstaedt, H. (1950).The reafference principle. Interactionbetween the central nervous system andthe periphery. Traduction in Selected pa-pers of Erich von Holst : The behaviouralphysiology of animals and man. London :Methuen.
Woodworth, R. S. (1899). The accuracy ofvoluntary movement. Psychological Review,Monograph (suppl.3).
Zelaznik, H. N., Hawkins, B., Kisselburgh,L. (1983). Rapid visual feedback processingin single-aiming movements. Journal ofMotor Behavior, 15, 217-36.
07_Sarlegna.fm Page 336 Mercredi, 18. avril 2007 2:29 14