Embed Size (px)
Citation preview

Le corps d’Ahmed : de la simulation vers le contrôle
Emmanuel GUILMINEAU
Equipe Modélisation NumériqueLaboratoire de Mécanique des Fluides-CNRS UMR 6598
Ecole Centrale de Nantes, Nantes, FRANCE
GRD Contrôle des Décollements, I.M.F.T. Toulouse24 mars 2005
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Physique de l’écoulement
Ahmed model
Expérience de Lienhart & Becker, 2003
Vitesse : 40m/s⇒ Re = 2.8×106
2 angles de la lunette : 25◦ et 35◦(Ahmed et al., 1984)
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Physique de l’écoulement
Topologie de l’écoulement dans la région arrière du corps
Topologie
25◦ 35◦
(Menter & Kuntz, 2002)
25◦ : bulle de séparation au début de la lunette arrière
35◦ : séparation massive sur toute la lunette arrière
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Solveur ISISDescription du maillage
Le Solveur ISIS
Ecoulements visqueux incompressibles
Phases non-miscibles
Equations de Navier-Stokes-Reynolds moyennées
Discrétisation volume fini entièrement impliciteVolume de controle de forme arbitrairePrécision du 2nd ordre en espace et en tempsEquation de pression : algorithme SIMPLESolveurs GMRES/CGSTAB + ILU(k)Version parallélisée (MPI)
Modélisation de la turbulence1 Eq : Spalart-Allmaras2 Eqs: K − ε, K −ω Wilcox/Menter, EASM, ASM7 Eqs: Rij −ωLES : D.E .S.
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Solveur ISISDescription du maillage
Maillage utilisé
Domaine
Domaine de calcul: 2×L devant et 3×L derrière le corps, lalargeur=0.935 m et la hauteur=1.4 m
x = 0 : fin du corps, y = 0: plan de symétrie, z = 0 : sol
Calcul avec ou sans les pieds du corps
Maillage
Sans les pieds : 1.8106 noeudsAvec les pieds : 3.9106 noeuds
Nombre de points sur le corps ∼ 15,300
Distance y+ ∼ 0.24
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
Angle de la lunette arrière: 25◦
Géométrie
Modèles de turbulence utilisés
1 Eq : Spalart-Allmaras
2 Eqs: K −ω SST (Menter), EASM, ASM
7 Eqs: Rij −ω (2 modèles pour le terme pression-déformation :IP and SSG)
LES : D.E .S. SST
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
Lignes de courant dans le plan de symétrie
Expérience Rij−ω SSG DES SST
Spalart-Allmaras EASM Rij−ω IP
K −ω SST ASM
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
U Profils de vitesse à y = 0
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
Lignes de frottement sur la lunette arrière
Spalart-Allmaras Rij −ω IP EASM
K −ω SST Rij −ω SSG ASM
DES SSTEmmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
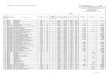
Coefficient de traînée
Modèle de turbulence Sans les pieds Avec les piedsSpalart-Allmaras 0.3291
K −ω SST 0.3074Rij −ω IP 0.3016
Rij −ω SSG 0.2698EASM 0.2138ASM 0.2505
DES SST 0.2725Expérience 0.2846
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
Angle de la lunette arrière 35◦
Géométrie
Sans les pieds Avec les pieds
Modèles de turbulence utilisés
1 Eq : Spalart-Allmaras
2 Eqs: K −ω SST (Menter), EASM, ASM
7 Eqs: Rij −ω (2 modèles pour le terme pression-déformation :IP and SSG)
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
Lignes de courant dans le plan de symétrie
x[mm]
z[m
m]
-1000 -500 0 5000
100
200
300
400
500
600
Expérience Rij−ω SSG Rij−ω IP
Spalart-Allmaras EASM
K −ω SST ASM
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
U Profils de vitesse à y = 0 (sans les pieds)
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
Lignes de frottement sur la lunette arrière (sans les pieds)
Spalart-Allmaras Rij −ω IP EASM
K −ω SST Rij −ω SSG ASM
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
U Profils de vitesse dans le plan de symétrie
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
Coefficient de traînée
Modèle de turbulence Sans les pieds Avec les piedsSpalart-Allmaras 0.3404 ×
K −ω SST 0.2895 0.3138Rij −ω IP 0.2835 0.3123
Rij −ω SSG 0.2504 0.2858EASM 0.2343 0.2674ASM 0.2386 ×
Expérience × 0.2551
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Angle de la lunette : 25◦
Angle de la lunette : 35◦
Remarques
Conclusions
25◦ : aucun modèle de turbulence ne prédit la séparation et leréattachmement sur la lunette arrière.
35◦ : toutes les simulations prédisent un bon accord avec lesdonnées expérimentales.
Contrôle
Tentative de contrôle pour l’angle d’incidence de la lunette de 35◦,
Modèle de turbulence : EASM,
Maillage sans les pieds de la maquette.
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
DéfinitionCorps d’AhmedRésultats
Définition du jet
U = Ujetd jet
d jet : vecteur unité représentantla direction du jet,
αjet : angle entre d jet et la lunette,
Ujet : vitesse du jet
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
DéfinitionCorps d’AhmedRésultats
Corps d’Ahmed
Caractéristiques
h = 1mm, soit 0.45% de la longueur de la lunette
75% de la largeur du corps d’Ahmed,
A = 145.875mm2, soit 0.34% de la surface de la lunette.
Maillage
Corps d’Ahmed : 28300 points,
Fente : 350 points (10 × 35).
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
DéfinitionCorps d’AhmedRésultats
Lignes de courant
Ujet = 0m/s Ujet = 24m/s and αjet = 90◦
Ujet = 48m/s and αjet = 60◦ Ujet = 41m/s and αjet = 337◦
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
DéfinitionCorps d’AhmedRésultats
Lignes de frottement
Ujet = 0m/s Ujet = 24m/s and αjet = 90◦
Ujet = 48m/s and αjet = 60◦ Ujet = 41m/s and αjet = 337◦
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
DéfinitionCorps d’AhmedRésultats
Coefficient de trainée
AngleVitesse 30◦ 60◦ 90◦ 218◦ 305◦ 335◦ 337◦
Aspiration Soufflage
0 m/s 0.2412 0.2412 0.2412 0.2412 0.2412 0.2412 0.2412
24 m/s 0.2687 0.2692 0.2419
41 m/s 0.2386
48 m/s 0.2692 0.2670 0.2990 0.2665
49 m/s 0.2387
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
DéfinitionCorps d’AhmedRésultats
Coefficient de trainée
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
DéfinitionCorps d’AhmedRésultats
Vecteur vitesse dans le plan de symétrie
Ujet = 0m/s Ujet = 41m/s and αjet = 337◦
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
DéfinitionCorps d’AhmedRésultats
Coefficient de pression à l’arrière
Plan de symétrie
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed

IntroductionLe numérique
RésultatsContrôle
Conclusions
Conclusions & Perspectives
Conclusions
Premières tentatives de contrôle pour l’incidence de 35◦,
Gain environ 2%
Perspectives
Positionner une fente sur le côté de la lunette arrière,
Utilisation de plusieurs fentes (soufflage, aspiration).
Emmanuel Guilmineau, LMF, Ecole Centrale de Nantes Corps d’Ahmed