Embed Size (px)
Citation preview
Numéro 23 Septembre 2005
MMMIIICCCRRR BBBEEE
- Le virus de l’informatique – La fièvre de l’animation -
Microbe est une revue du Groupe Robotique etInformatique de l’association Planète Sciences Toute duplication ou photocopie de cette œuvre esttrès fortement conseillée.
La nouvelle carte interface ASPIC

Microbe 23 – 2005
2 WWW.PLANETE-SCIENCES.ORG/ROBOT
Edit
Deux numéros de MICROBE en moins d’un an… l’exploit mérite d’être souligné ! Alors, moi je dis « chapeau bas pour les auteurs des articles ». Espérons toutefois que le rythme pourra être maintenu à l’avenir, après 4 années d’une longue attente. Au détour de la vingtaine de pages de ce numéro, nous vous invitons au « Paradis de la Robotique » et vous permettons de découvrir le concept de Junior Association. Les férus d’électronique se délecteront avec les articles sur le robot Cortex et l’astuce sous EAGLE, logiciel bien connu des électroniciens. Mais l’activité robotique ne se limite pas aux prouesses techniques. L’une des particularités de Planète Sciences réside dans son soucis de rendre abordable aux jeunes ses activités. L’article « Un atelier robotique sans électricité » s’inscrit dans cette direction. Bon, d’accord, certains pourront avancer qu’en l’absence d’électricité on peut difficilement qualifier un objet de robot… mais laissons là ces querelles d’experts et contentons-nous d’apprécier à sa juste valeur cette expérience qui mérite d’être contée. Mais, MICROBE ne serait pas MICROBE… sans ses comptes-rendus d’expériences. Vous découvrez dans ce numéro une interview de Roger Tanguy, un compte-rendu de participation à Hispabot, sans oublier les traditionnelles fiches d’animation de Monseigneur Dayot. Je termine juste en lançant l’habituel appel à participation : que vous soyez écrivain-né ou que vous soyez fâché avec le stylo, n’hésitez pas à nous contacter. MICROBE est notre publication à tous et elle perdurera grâce à votre soutien. Bonne lecture et à bientôt pour le numéro 24.
Tonton
Planète Sciences 16, place Jacques Brel 91 130 Ris-Orangis Tél. direct: 01.69.02.76.12 Std.: +33 (0) 1.69.02.76.10 Fax: +33 (0) 1.69.43.21.43
Ont contribué à cette publication : Rachid Aït-Mansour, Loïc Dayot, Aïala Ellenberger, Gwénaël Forestier, Valérie Péron, Julien et Soudabeh Serre, Thierry Coquard, Antoine Zores, Olivier Dalechamps, Abdelaziz Badri, Dominique Maronnier, Jean-Roland Tartas, Roger Tanguy. Microbe est une publication du GROIN (GRoupe RObotique et INformatique) - secteur robotique de l’association Planète Sciences.
Le Microbe et ses liens hypertextes, est téléchargeable au format PDF à l’adresse :
www.planete-sciences.org/robot/ index.php?section=ressources&option=microbe
Sommaire Page 3 – Interview de Roger Tanguy Page 6 – Petite description d’Hispabot Page 9 – Projet d’animation robotique Page 12 – Cortex le robot Page 17 – Un atelier SANS électricité Page 21 – Visite au « Paradis de la robotique » Page 24 – Astuce sous EAGLE Page 25 – Références Planète Sciences

MICROBE 23
3 WWW.PLANETE-SCIENCES.ORG/ROBOT
Interview de Roger Tanguy, professeur à l'université de Paris 8, par Gwénaël
> Bonjour Roger, nous nous retrouvons lors du 8ème Colloque Francophone de Robotique Pédagogique 2005, organisé pendant le festival ARTEC à la Ferté Bernard (72), non pas par hasard, mais plutôt parce que tu es l’un des « grands anciens » du secteur robotique de Planète Sciences, mais aussi l’un des précurseurs de la robotique pédagogique en France. Peux-tu nous parler de ton parcours personnel de chercheur en robotique et de celui de bénévole dans notre association ?
> Mes relations avec l’éducation nationale ont mal commencé : en effet j’ai été jeté du système scolaire à l’âge de 13 ans et demi ! A 16 ans et demi je commence dans l’industrie comme électronicien. Pour améliorer ma situation, je m’inscris au Conservatoire National des Arts et Métiers (CNAM) pour y suivre des cours du soir tout en poursuivant mon activité professionnelle (47h30 de travail par semaine). J'y obtiens là quelques connaissances qui me seront bien utiles, puisque grâce à elles je peux m'inscrire au département d’informatique de la faculté de Vincennes (Paris 8). Les cours se déroulant la journée, je décide d’arrêter de travailler. A la fac, je retrouve un copain de travail et avec lui je monte un laboratoire d'électronique. Après ma licence d’informatique, un de nos professeurs nous met au défi de mettre au point le 1er écran couleur pour ordinateur : nous relevons ce défi. Un écran de 72 X 50 pixels voit le jour : ce sera mon projet de maîtrise. Sa faible résolution le destine à la sortie des premières compositions artistiques par ordinateur. Le copain l’améliorera et le commercialisera sous le nom de « Colorix ». Après une licence de sciences de l’éducation, il me faut retravailler et je prends en charge la gestion informatique de la scolarité de l’Université. Parallèlement, je souhaite m’inscrire à un DEA de traitement de l’information à Orsay (Paris 10). Je dépose un dossier et passe un entretien avec l’enseignant chargé de la sélection. Il me demande ce que j’envisage comme sujet de stage : passionné de modélisme depuis tout petit, et avec l’apparition des processeurs CMOS et des premiers mini-gyromètres, je lui propose de réaliser un modèle réduit d’avion entièrement autonome, en quelque sorte un drone avant l’âge. Il ne semble pas très convaincu sur le moment et je pense que mes chances d’être retenu sont bien faibles. Le week-end suivant j’assiste, près de Rambouillet, à une compétition de modèles réduits de bateaux radiocommandés. Et là, sur les bords du lac, je croise cet enseignant. Nous nous saluons et après quelques pas, il me hèle pour me dire que ma candidature est retenue…
En fin de compte, mon stage de DEA, je le ferai à Jussieu (Paris 6), car le département d’informatique cherche un stagiaire pour rendre autonome une tortue de plancher Logo. Cette tortue est un robot tel que l’on peut en voir sur les Trophées de Robotique de nos jours : une planche, deux moteurs pour la propulsion et un moteur qui actionne un stylo pour tracer des dessins sur de grandes feuilles de papier à même le sol et un immense câble de liaison à l’ordinateur. Avec mon expérience en liaisons radio, j’accepte : il y a moins de risques de crash que les avions. Je fais ainsi le premier modèle autonome de tortue plancher commandé par ordinateur en langage Logo. Martial Vivet, Paul Delannoy et Jean-Marc Salomon testeront les premiers prototypes auprès des élèves de primaire, de collège et d’associations.
PORTRA I T
Ecole primaire découvrant le langage Logo
MICROBE 23
4 WWW.PLANETE-SCIENCES.ORG/ROBOT
Rappel historique : Alan Key et Seymour Papert, tous deux chercheurs au MIT (Massachusetts Institute of Technology Etats Unis), développent la notion de micro-monde et le langage Logo, les premiers documents dont je dispose sur le sujet date de 1972. Le langage Logo est associé à un environnement concret tel que « boite à musique » ou « robot mobile », à la différence d’autres approches pédagogiques basées sur la simulation sur ordinateur d’expériences. Les universitaires français de Paris 6, du Mans, ainsi que d’autres établissements reprennent le concept et pensent que l’informatique, par l’intermédiaire du langage Logo, peut apporter un plus dans l’apprentissage de certains domaines, comme dans l’enseignement de la géométrie ; le terme géométrie de tortue est alors utilisé. Les tortues de plancher américaines et canadiennes sont alimentées et commandées par un câble (idéales pour apprendre à tresser des scoubidous !).
Avec la tortue de plancher autonome, alimentée par batteries et commandée par radio, l’utilisation s’en trouve simplifiée. Je la décore en rouge à pois noirs et voilà une coccinelle souriante. Cette coccinelle a été par la suite expérimentée dans les écoles normales aujourd’hui devenues les IUFM, où se forment les futurs professeurs des écoles. Et c’est à ce moment que je rencontre l’Association Nationale Sciences Techniques Jeunesse… désormais Planète Sciences. En 1983, Gérard Gautier est l’un de mes étudiants à l’université de Paris 8 Saint-Denis (l’université a été déménagée entre temps), et créateur entre autres du journal Microbe. Il était très investi dans l'association, du temps où elle s’appelait encore ANSTJ. C’est par lui que j’ai eu mon premier vrai contact avec l’association. Il m’apprend que l'association a reçu un appel d'offre du ministère de l'Education Nationale pour mettre en place les « premières écoles d’été en sciences et techniques » destinées aux enseignants du primaire et du secondaire. Je participe, à Orléans, au séminaire destiné à réfléchir sur le sujet, séminaire mis en place par Jean-Claude Guiraudon et Guy Préaux, deux piliers historiques de l’association. C’est là qu’ils me demandent d'organiser la première école d'été sur la robotique pédagogique. Je me lance donc, avec les moyens de l'époque ce qui en fera sourire plus d’un maintenant :
- ordinateur de type PC, puis Thomson TO7, - une interface électronique commandée en Basic, puis en Logo, - une carte wrappée pour l’interface série, - un train électrique, - des rails crocodile : contacts sur le rail qui permettent de « voir » le passage du train
électroniquement ; on peut de là commander le sens du train, la position des aiguillages, les arrêts en gare…
Le principe est de faire comprendre qu’il est possible d’agir sur un environnement concret, dans ce cas un train électrique modèle réduit contrôlé par un programme informatique. Aux stagiaires d’envisager d’autres applications tel qu’ascenseur, mobile sur roue, ou adaptation de jouet comme un pont roulant. C’est donc ainsi que se passèrent les 2ème, puis 3ème écoles d'été de 1983 à 1985. Suite à cela, je fais une pause associative pour m’occuper de ma famille.
MICROBE 23
5 WWW.PLANETE-SCIENCES.ORG/ROBOT
Quelques années plus tard, à la fête des 30 ans de l'ANSTJ (1992), je rencontre la nouvelle équipe qui a fondé le secteur robotique : Loïc Dayot, Amar Aber, Rachid Aït-Mansour, Frédéric Fournier. Je me joins naturellement à eux dans leurs actions et dans leurs discussions. Ils organisent peu de temps après avec VM Productions, la première Coupe de Robotique à l'école Centrale Paris. Comme j'avais vu les émissions E=M6 qui relataient les concours de robotique aux Etats Unis, j’ai été immédiatement séduit. J'ai motivé mes étudiants pour y participer. C’est ainsi, que les étudiants en licence M.I.M.E. de Paris 8 ont remporté cette 1ère Coupe de France de Robotique en 1994. Puis, les membres du groupe robotique et informatique (le GROIN) me poussent à entrer dans le conseil d'administration de l'ANSTJ. Les sujets traités : finances, modifications des statuts, ne sont pas des sujets qui m’intéressent, et pour me sentir utile, je propose que le département M.I.M.E. que je dirige, héberge le 1er site web de l'association. Au fil des ans, les concours de Robotique, Trophées et Coupe, deviennent les éléments dominants du GROIN. Avec Loïc Dayot, nous décidons de faire autre chose : nous nous lançons dans l’étude et la création d’outils pour l’animation. Nous les mettons au point lors de réunions dites du "jeudi". C’est ainsi qu’est sortie la carte à microcontrôleur Foxacogite 2 évolution de la N°1. Elle offre plusieurs évolutions comme : entrées analogiques, commandes en Modulation de Largeur d’Impulsion (MLI). Nous y avons implémenté les interprètes des langages Basic et LISP, avec la documentation en français, des exemples et des aides ! La carte « Foxacogite 2 » vient en complément logique des interfaces Module Electronique de Commande MEC, et Super-MEC avec son protocole I2C. Nous avons aussi traduit tous les textes du logiciel source de l’interprète MSWLogo de l’Université de Berkeley : primitives, bibliothèque, menu, exemples et messages d’erreurs. > Roger, as-tu un message à faire passer aux « p’tits nouveaux » que nous sommes ? > Oui, il faut éviter de confondre progrès scientifiques et marketing commercial, et de zapper trop rapidement vers de nouveaux produits. Par exemple, si nous regardons la programmation, qui a-t-il de vraiment nouveau depuis la publication des livres « The art of computer programming » de Donald E. Knuth dont le premier volume est paru en 1968 ? L’évolution en informatique a porté principalement sur la miniaturisation des composants et bien peu sur la théorie : l’algèbre de Boole est toujours utilisé bien qu’il remonte au 19ème siècle. Je pense donc que dans la diffusion de la connaissance scientifique, il est sage d’évoluer doucement et ne pas se précipiter aveuglement vers les nouvelles technologies, même si parfois nous ne pouvons faire autrement, je pense entre autre aux systèmes d’exploitation informatique. > Et tes projets actuels ou proches? > La fin de mes activités d’enseignant pour la fin de l’année ! > Et bénévole permanent, ou sur le terrain… cela ne te dis pas ? > Je ne pense pas. Actuellement je remplis ma cave de tous les trucs techniques que je n'ai pas fini. Et puis autrement, le retour au modélisme aérien. Et je mets une carte Foxacogite 2 dans l’émetteur de radiocommande !!! > Merci Roger pour ton dévouement à l'association et à bientôt en espérant te retrouver avec encore plein d’idées et de précieux conseils à nous faire partager.
LE SECTEUR ROBOTIQUE EN 2005 Le secteur Robotique, c’est un groupe de bénévoles et de permanents – le GROIN -, répartis en 5 groupesde travail ou commissions, qui n’attendent que vous pour mettre en œuvre les projets des bénévoles !
- Commission Animations – Formations - Commission Vie associative et Publications - Commission Trophées de Robotique - Commission Eurobot Open et Coupe de France de Robotique - Commission Base Technique
Pour en savoir plus, et s’investir au sein du secteur robotique… Gwénaël Forestier au 01 .69.02.76.12 Mail : [email protected]
www.planete-sciences.org/robot/index.php?section=vie asso&option=groin
MICROBE 23
6 WWW.PLANETE-SCIENCES.ORG/ROBOT
Petite description d’Hispabot, par Julien Serre 2004 C’est bien connu, les concours de robotique sont des lieux stimulants pour la réalisation de robots. Mais voilà, la Coupe de France de Robotique est un concours assez compliqué. De plus, ce concours est plutôt destiné à des équipes constituées de plusieurs personnes et disposant de moyens conséquents. Il nécessite de fait, un investissement en temps et en argent assez phénoménal. Alors comment faire quand on est passionné, tout seul, ou que l’on cherche tout simplement un concours moins difficile pour y passer moins de temps ?
Le concours Hispabot Et bien, le club des Fribotte a testé pour vous Hispabot, le sympathique concours espagnol qui se déroule tous les ans depuis 2000 à l’université d’Alcala de Hénarès, près de Madrid. Ce concours, a lieu fin avril et comporte plusieurs épreuves. Chaque robot est conçu pour participer à l’une de ces épreuves. Les six épreuves en 2004 étaient : Les robots « Sumo » où chaque robot doit faire sortir son concurrent du cercle blanc qui délimite l’aire de jeu ; taille et poids des robots sont limité. La course de vitesse « Velocistas » dans laquelle deux robots font la course, un peu comme les courses de poursuites en vélodrome. Le premier qui rattrape l’autre a gagné. Il faut pour cela suivre un circuit en forme de 8 et comportant un pont à monter ; la piste est matérialisée par deux bandes noires. Le parcours est délimité par deux bandes rouges qu’il ne faut surtout pas toucher sous peine de disqualification ! Le labyrinthe « Laberinto » auquel nous avons participé : les robots doivent sortir le plus rapidement possible d’un labyrinthe dont ils connaissent le plan à l’avance, mais pour lequel ils ne connaissent ni leur position, ni leur direction de départ ; petit bonus qui rapporte 30 secondes : envoyer une balle de ping-pong au centre du labyrinthe. A noter que cette année, c’est « Cnossos », le robot des Fribottes qui a remporté le concours ! et qu’un deuxième robot Fribotte « Picobot », a terminé troisième ! Le suivi de ligne « Rastreadores » dans lequel un robot doit le plus rapidement possible finir un parcours défini par une ligne noire, et ce, avec des embranchements de circulation à respecter et avec des angles de virage très délicats à négocier !
La démonstration libre « Prueba Libre » qui consiste en une démonstration de robots innovants. Et bien sûr « EurobotOpen- Espagne » qui qualifie les 3 meilleures équipes espagnoles pour Eurobotopen. L’épreuve espagnole accueille des équipes françaises ou étrangère qui souhaitent y participer en tant que « candidats libres ». Des défis techniques Vous voyez, le choix de défis est vaste et chaque petite épreuve apporte son lot de choses intéressantes à mettre en œuvre, d’un point de vue technique : Le suivi de ligne demande un excellent asservissement et une bonne réflexion sur les capteurs de ligne, leur utilisation, et leur interprétation ! Le labyrinthe nécessite la résolution de plusieurs problèmes mathématiques. Comment savoir où est le robot ? Quel est le chemin le plus rapide vers la sortie ? Tout cela n’est pas insurmontable, mais encore faut-il que le robot arrive à « voir » les cases qui composent le labyrinthe. Pas évident ! La course de vitesse est, vous allez me dire, très facile. Un suivi de ligne et hop ! C’est joué ! Oui … c’est vrai ! Mais à plus de 3 mètres par secondes, le suivi de ligne n’est plus du tout une chose évidente à faire : imaginez-vous dans les couloir du métro avec une moto à plus de 100km/h… Restent les sumos qui sont, bien sûr, avant tout un défi mécanique, pour lequel il faut posséder la meilleure adhérence au sol pour un poids donné. Mais l’électronique, et en particulier la détection de l’adversaire, apportent un réel plus ! La stratégie Pour chaque épreuve il n’y a qu’une action complexe à réaliser. Les robots sont donc simples à concevoir. Mais ne nous y trompons pas, la difficulté est toujours au rendez-vous ! Cette difficulté se retrouve soit dans la recherche de la performance, comme aller le plus vite possible, ou bien dans les contraintes que l’on se fixe soi-
MONDE

MICROBE 23
7 WWW.PLANETE-SCIENCES.ORG/ROBOT
même, comme suivre les lignes avec une caméra, la participation avec un robot serpent ou même faire plusieurs épreuves d’Hispabot avec le même robot !
Mais ces épreuves datent de 2004. Qu’en sera-t-il les prochaines années ? En fait, il n’est pas possible de le savoir actuellement. Les épreuves sont généralement les mêmes d’une année sur l’autre, à quelques améliorations près. Selon nos sources, l’une de ces épreuves pourrait être supprimée et remplacée par une nouvelle. Mais cela devait déjà être le cas l’an dernier ☺ . Il faut dire que nos amis espagnols sont un peu débordés par l’organisation… Hispabot est uniquement géré par des enseignants et quelques étudiants bénévoles de l’université d’Alcala. Quand aurons-nous les informations pour le futur Hispabot ? Difficile de le dire. En 2005 le concours a été annulé et en 2004 le règlement définitif du concours du labyrinthe est sorti … fin janvier. Soit trois mois avant l’épreuve en Espagne. Il vaut donc mieux ne pas trop se presser ! Le déroulement A présent, comment se passe le concours proprement dit ? Et bien il se déroule sur deux jours. Une première journée de qualification lors de laquelle un certain nombre de robots sont sélectionnés (suivant les épreuves), et une deuxième journée pour les phases finales. La veille a lieu le concours interne de l’université d’Alcala (Alcabot), il sélectionne les 3 meilleurs robots « locaux » dans chacune des épreuves pour le lendemain. Le jour « J », les épreuves s’enchaînent très rapidement dans le grand amphithéâtre de l’école
polytechnique du campus. Les étudiants de l’université passent voir leurs camarades, et l’ambiance est assurée ! Olé !
La grosse différence avec ce qui ce fait en France, est que les robots sont mis dès le début de l’épreuve sur les étagères d’une armoire, et à partir de là on n’a plus le droit d’y toucher pour la série de matchs en cours ! Plus de problème de rabattage d’équipes, ou de bricolage de dernière minute qui s’éternisent. Soit ça marche, soit ça ne marche pas ! C’est un peu dur certes, mais il faut reconnaître que cela fait gagner du temps ! Par rapport à la Coupe de France de Robotique, le robot, est souvent construit par un seul étudiant, il est donc moins « pro ». Il n’empêche que certains se sont montrés très efficaces dans les épreuves ! Et bien sûr, après le concours, il ne faut pas hésiter à aller visiter Madrid ! La ville est très calme. On peut profiter des 1er et 2 mai, qui sont des jours fériés là-bas.
un des bâtiments de l’Université d’Alcala
(mais là, rien à voir avec celui du concours)
Soudabeh et Julien, 1er au « Laberinto » Lionel, 3ème au « Laberinto »

MICROBE 23
8 WWW.PLANETE-SCIENCES.ORG/ROBOT
Si vous désirez plus d’informations ou des contacts avec d’autres participants Français à Hispabot, postez donc un petit message sur le forum de Planète Sciences dans la rubrique « ROBOTIQUE / ROBOTICS », ou envoyez-moi directement un mail : [email protected]
Julien, pour les Fribottes. Les robots vainqueurs des épreuves d’Hispabot 2004
Sumo Prueba Libre EUROBOTopen
Velocistas Rastreadores Laberinto
Dernière minute de l’édition : Nous venons d'apprendre que le concours Hispabot va désormais se dérouler tous les deux ans. Il n'y a donc pas eu d'édition en 2005. Rendez-vous donc en 2006 !
Liens utiles Le site d’Hispabot (en Espagnol) : www.hispabot.org Un lien sur les règlements 2004 : www.depeca.uah.es/alcabot/hispabot2004/pruebas.htm
LES FORMATIONS TECHNIQUES ROBOTIQUE 2005 Les bénévoles du secteur robotique vous proposent de partager leurs savoirs… 1er et 2 octobre : initiation CATIA, avec le soutien de Dassault Systemes, par Jean-Baptiste Ristorcelli 8 et 9 octobre : initiation à l'électronique, Clément Quinson 19 et 20 novembre : initiation Microcontrôleur (PIC et langage C), par Julien Serre 26 et 27 novembre : routage et tirage de carte, par Lionel Grassin 10 et 11 décembre : analyse d'image, par Gaël Waiche Lieux : Base technique de Ris-Orangis (91) Contact : [email protected] et 01.69.02.76.12
MICROBE 23
9 WWW.PLANETE-SCIENCES.ORG/ROBOT
Projet d’animation robotique à Palaiseau, avril 1999 Monseigneur Dayot nous revient avec la description d’une expérience d’atelier robotique faite avec des enfants de classe CM. Ce retour d’expérience est formalisé sous la forme d’une dizaine de fiches. N’ayant pas souhaiter faire un Microbe spécial « ancien régime », vous retrouverez donc les fiches d’animation complémentaires à celles-ci dans les prochains numéros de Microbe. FICHE 1 Titre de l’activité : Initiation à l’Informatique -Robotique Le public et le cadre Les jeunes Vingt-six élèves de 10 ans, de l’école primaire Tailhan à Palaiseau (91). Ils sont très motivés. Ils bénéficient d’une classe sciences, en échange d’une classe transplantée pour laquelle les crédits n’étaient pas suffisants. Le cadre C’est une classe sciences de six jours d’animation, auxquels s’ajoute une visite de l’exposition sur la robotique à la Cité des Sciences et de l’Industrie à La Villette (Paris 19e). L’école a déjà bénéficié d’une classe sciences organisée par Planète Sciences Ile de France (ex Aloïse), dont le thème était « l’eau » en 1998. Les objectifs de l’animation Objectifs en terme de savoirs (connaissances)
- Avoir une définition de ce que sont : un robot et la robotique. - Avoir une notion du rapport entre vitesse et force d’un moteur. - Comprendre ce qu’est un langage de programmation et ses principales caractéristiques.
Objectifs en terme de savoir-faire (compétences) - Savoir utiliser les outils de manière autonome en toute sécurité, sans gâchis et à bon escient. - Savoir réaliser une construction en carton solide et esthétique. - Savoir réaliser un programme en langage Logo, composant des enchaînements d’actions. - Savoir brancher les modules électroniques de commande (MEC). - Savoir réaliser une transformation de mouvement. - Savoir choisir le bon nombre d’engrenages d’un moteur en fonction de l’utilisation attendue.
Objectifs en terme de savoir-être (comportements, méthode) - Participer activement à un projet expérimental et collectif. - Avoir une attitude de chercheur face à un problème ou une question.
Les moyens Le scénario général C’est un scénario « classique » au sein de Planète Sciences Ile-de-France. Dans un premier temps, quelques découvertes autour de différentes notions et techniques. Elles permettent de savoir ce qu’il est possible de réaliser en robotique dans la classe. Ensuite, tout le groupe réalisera un projet commun inspiré d’un conte « Scoubidou la poupée qui sait tout ! ».
La liste des séquences prévues - Qu’est-ce qu’un robot ? - Course de voitures. Rapport vitesse force et découverte des outils et matériaux. - Verbes d’actions compliquées. Transformation de mouvements. - « Poules-renards-vipères » aveugle. Qu’est-ce qu’un langage ? - Découverte LOGO. - Découverte Module Electronique de Commande. - Choix d’un projet. - Réalisation du projet. - Valorisation du projet.
AN I
MAT ION
MICROBE 23
10 WWW.PLANETE-SCIENCES.ORG/ROBOT
Le planning Jour 1 : Qu’est-ce qu’un robot ? Course de voitures. Rapport vitesse et découverte des outils et matériaux. Jour 2 : La transformation de mouvements, via la séquence dite des « Verbes d’actions » mais cette séquence était visiblement trop compliquée. Grand jeu : « Poule-renard-vipère aveugle ». Qu’est-ce qu’un langage ? Découverte du langage informatique LOGO. Jour 3 : Verbes d’actions « compliquées » comme : lancer, classer, diviser… Transformation de mouvements (suite). Découverte des interfaces MEC. Choix des projets : présentation de ce qui est possible. Jour 4 Détermination du choix des projets. Maquettes de projet. Réalisation du projet. Jours 5 à 6 : Réalisation du projet. L’issue de l’animation Plus tard : Valorisation des projets, sans doute dans le cadre d’une journée portes ouvertes de l’école. Le matériel disponible, nécessaire Deux malles d’animation robotique sont mises à disposition par Planète Sciences Ile-de-France. La première est orientée « mécanique », la seconde « électricité ». Une mallette « interfaçage » les accompagne. Nous utilisions la salle informatique bien équipée : les ordinateurs disposaient du logiciel LogoPlus ancêtre du MSWLogo actuel . L’évaluation Ce qui devaient être à mesurer : les connaissances, les compétences, l’intérêt, l’amusement, l’avancée du projet, les relations entre les enfants… Le bilan Le bilan détaillé de chaque séquence sera présenté dans les prochains numéros de Microbe. Il y a huit fiches au total décrivant l’atelier robotique. Les fiches séquences « découverte MEC » et « découverte LOGO » n’ont pas été rédigées. Ces séquences ont été très rapides ou non faites, faute de don d’ubiquité de l’unique animateur. L’enseignante malgré son peu de compétences techniques, a participé activement à la gestion du groupe, à l’aide technique (découpe au cutter indispensable), et aux parties touchant à l’écrit. Heureusement que l’aide éducateur formé en une journée, a apporté tout ce qu’il pouvait dans la limite de ses compétences. Un animateur pour une classe de 26 élèves, ça n’est pas à reconduire, c’est très éprouvant. C’est surtout dommageable pour la qualité de l’animation.
Planète Sciences c’est Quoi ? Qu’est ce que je peux y faire ?
Animations Séjours de vacances Clubs scientifiques Ateliers scolaires Formations Observatoire de Buthiers Week-ends associatifs Scientificobus
Trophées de Robotique – février- mars Coupe de Robotique – mai Eurobot Open - mai Campagne des Clubs Espace – juillet/août Nuit des étoiles - août Campagne Astro - août Rencontres nationales scientifiques et techniques de l’Environnement – novembre

MICROBE 23
11 WWW.PLANETE-SCIENCES.ORG/ROBOT
FICHE 2 Titre : Course de voitures Nature de l’activité : Mécanique. Objectifs de la séquence : - découvrir le matériel et l’outillage ; - appréhender le rapport vitesse-force, le rôle des engrenages ; - développer la capacité à travailler en binôme ; - construire un objet en trois dimensions. Durée : 4 heures ½ Déroulement : Consigne : « vous devez, par groupes de deux, réaliser un véhicule qui transportera une charge ». Les moteurs fournis sont à base de kits Opitec déjà assemblés, comportant un nombre d’engrenages variables. On construit. Les enfants, lorsqu’ils utilisent pour la première fois un outil dangereux, sont priés de demander la présence d’un adulte. On effectue une course de véhicules à vide puis chargés d’un poids ; on note les temps de chacun. A la fin, on conclue sur le rapport entre la vitesse et le nombre d’engrenages, ainsi que sur la « puissance » des véhicules. Préparation et matériel :
- Des moteurs Opitec déjà montés (voir illustration) - Du carton. - 1 malle atelier robotique.
Rôle et attitude de l’animateur :
- L’animateur donne les consignes. - Il veille à la sécurité. Il répète le bon fonctionnement, en
particulier du pistocolle, au moment où les enfants l’utilisent pour la première fois.
- Il anime les courses. - Il conclut en formalisant la notion évoquée.
Bilan : La première heure a été difficile parce que toute la classe était présente dans la même pièce. Il y fut remédié par la suite en se divisant en mini-groupe lorsque le professeur et l’assistant éducatif ont reçu les consignes. La séquence a duré plus longtemps que prévu initialement. Les constructions étaient plutôt brouillonnes. Les accidents ont été rares pendant cette séquence. Les enfants nous ont beaucoup sollicités. La course a été, comme prévu, très animée. Les résultats des courses ont permis de bien montrer les atouts des moteurs comportant plus ou moins d’engrenages. En revanche, ils n’ont pas été bien mis en formes : les résultats n’ont pas été reportés proprement sur une feuille et comparés uns à uns, en comparant les charges maximales et les vitesses de pointe réalisées par les différents montages donc sont restées inexploitables par la suite. Dans la séquence suivante (verbes d’action), les enfants savaient choisir le bon nombre d’engrenages lorsqu’on leur posait la question. Prolongement : Des constructions plus complexes.
MICROBE 23
12 WWW.PLANETE-SCIENCES.ORG/ROBOT
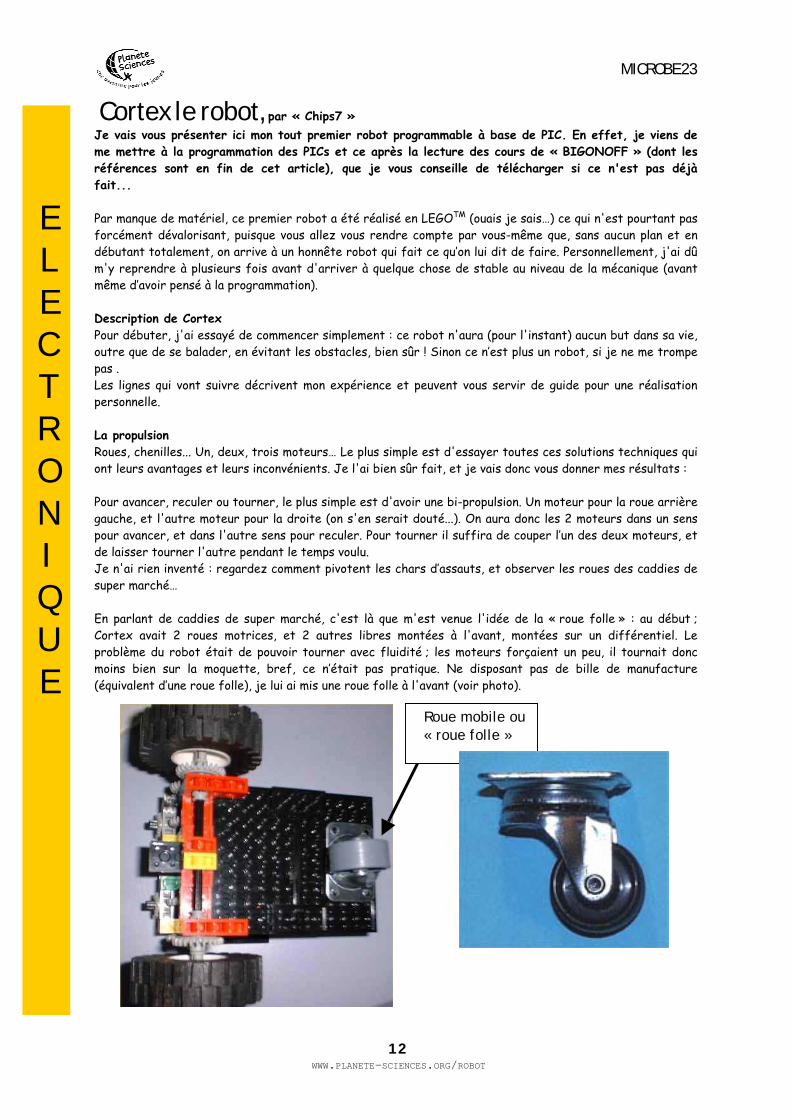
Cortex le robot, par « Chips7 » Je vais vous présenter ici mon tout premier robot programmable à base de PIC. En effet, je viens de me mettre à la programmation des PICs et ce après la lecture des cours de « BIGONOFF » (dont les références sont en fin de cet article), que je vous conseille de télécharger si ce n'est pas déjà fait... Par manque de matériel, ce premier robot a été réalisé en LEGOTM (ouais je sais…) ce qui n'est pourtant pas forcément dévalorisant, puisque vous allez vous rendre compte par vous-même que, sans aucun plan et en débutant totalement, on arrive à un honnête robot qui fait ce qu’on lui dit de faire. Personnellement, j'ai dû m'y reprendre à plusieurs fois avant d'arriver à quelque chose de stable au niveau de la mécanique (avant même d’avoir pensé à la programmation). Description de Cortex Pour débuter, j'ai essayé de commencer simplement : ce robot n'aura (pour l'instant) aucun but dans sa vie, outre que de se balader, en évitant les obstacles, bien sûr ! Sinon ce n’est plus un robot, si je ne me trompe pas . Les lignes qui vont suivre décrivent mon expérience et peuvent vous servir de guide pour une réalisation personnelle. La propulsion Roues, chenilles... Un, deux, trois moteurs… Le plus simple est d'essayer toutes ces solutions techniques qui ont leurs avantages et leurs inconvénients. Je l'ai bien sûr fait, et je vais donc vous donner mes résultats : Pour avancer, reculer ou tourner, le plus simple est d'avoir une bi-propulsion. Un moteur pour la roue arrière gauche, et l'autre moteur pour la droite (on s'en serait douté...). On aura donc les 2 moteurs dans un sens pour avancer, et dans l'autre sens pour reculer. Pour tourner il suffira de couper l’un des deux moteurs, et de laisser tourner l'autre pendant le temps voulu. Je n'ai rien inventé : regardez comment pivotent les chars d’assauts, et observer les roues des caddies de super marché… En parlant de caddies de super marché, c'est là que m'est venue l'idée de la « roue folle » : au début ; Cortex avait 2 roues motrices, et 2 autres libres montées à l'avant, montées sur un différentiel. Le problème du robot était de pouvoir tourner avec fluidité ; les moteurs forçaient un peu, il tournait donc moins bien sur la moquette, bref, ce n’était pas pratique. Ne disposant pas de bille de manufacture (équivalent d’une roue folle), je lui ai mis une roue folle à l'avant (voir photo).
E L ECTRON IQUE
Roue mobile ou « roue folle »
MICROBE 23
13 WWW.PLANETE-SCIENCES.ORG/ROBOT
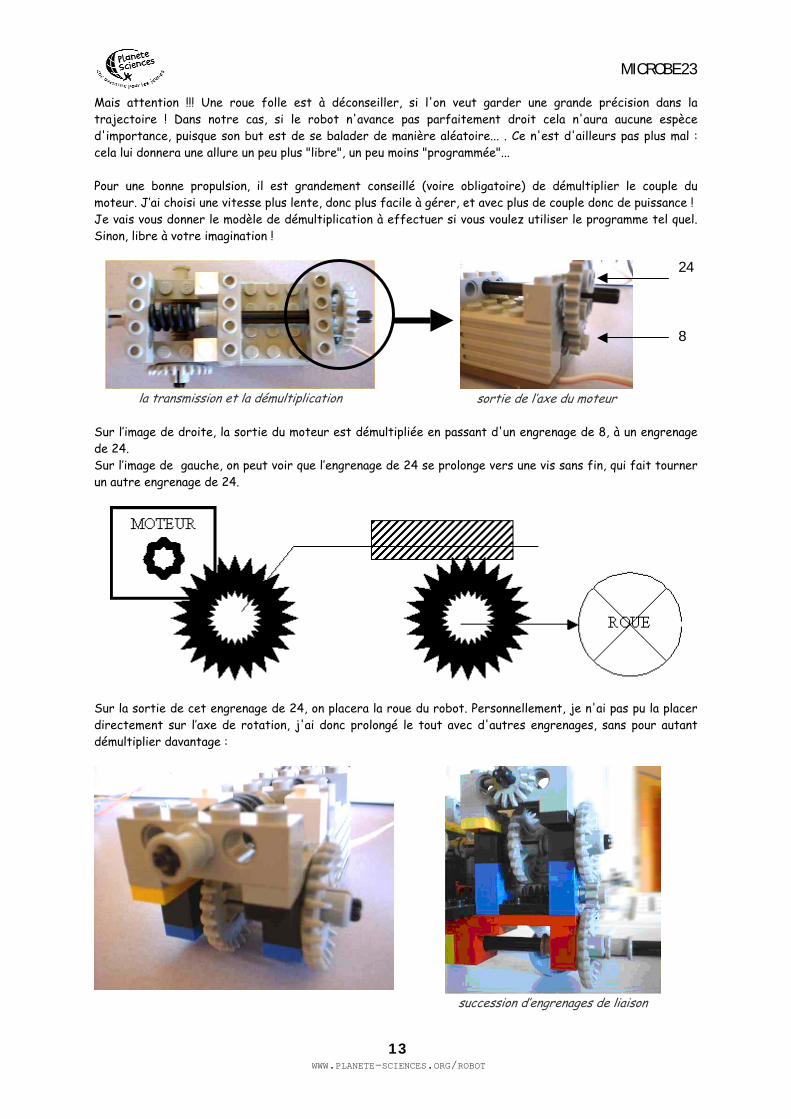
Mais attention !!! Une roue folle est à déconseiller, si l'on veut garder une grande précision dans la trajectoire ! Dans notre cas, si le robot n'avance pas parfaitement droit cela n'aura aucune espèce d'importance, puisque son but est de se balader de manière aléatoire... . Ce n'est d'ailleurs pas plus mal : cela lui donnera une allure un peu plus "libre", un peu moins "programmée"... Pour une bonne propulsion, il est grandement conseillé (voire obligatoire) de démultiplier le couple du moteur. J’ai choisi une vitesse plus lente, donc plus facile à gérer, et avec plus de couple donc de puissance ! Je vais vous donner le modèle de démultiplication à effectuer si vous voulez utiliser le programme tel quel. Sinon, libre à votre imagination !
la transmission et la démultiplication
sortie de l’axe du moteur
Sur l’image de droite, la sortie du moteur est démultipliée en passant d'un engrenage de 8, à un engrenage de 24. Sur l’image de gauche, on peut voir que l’engrenage de 24 se prolonge vers une vis sans fin, qui fait tourner un autre engrenage de 24.
Sur la sortie de cet engrenage de 24, on placera la roue du robot. Personnellement, je n'ai pas pu la placer directement sur l’axe de rotation, j'ai donc prolongé le tout avec d'autres engrenages, sans pour autant démultiplier davantage :
succession d’engrenages de liaison
24 8
MICROBE 23
14 WWW.PLANETE-SCIENCES.ORG/ROBOT
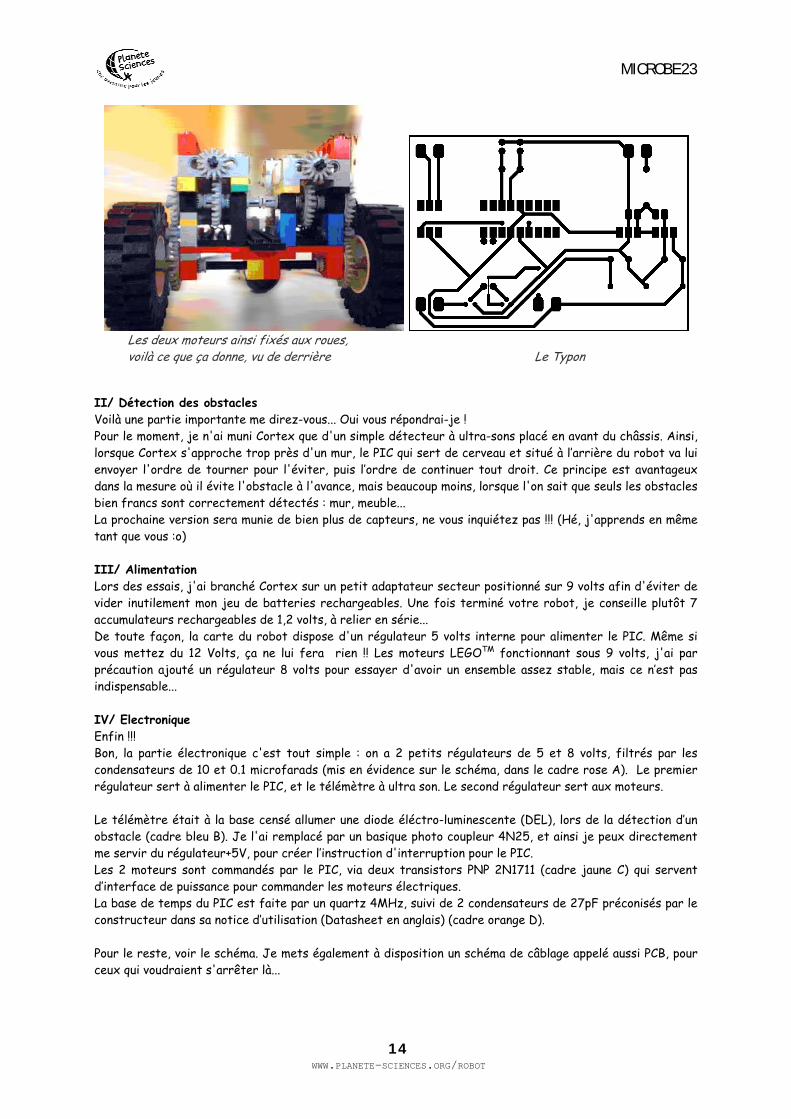
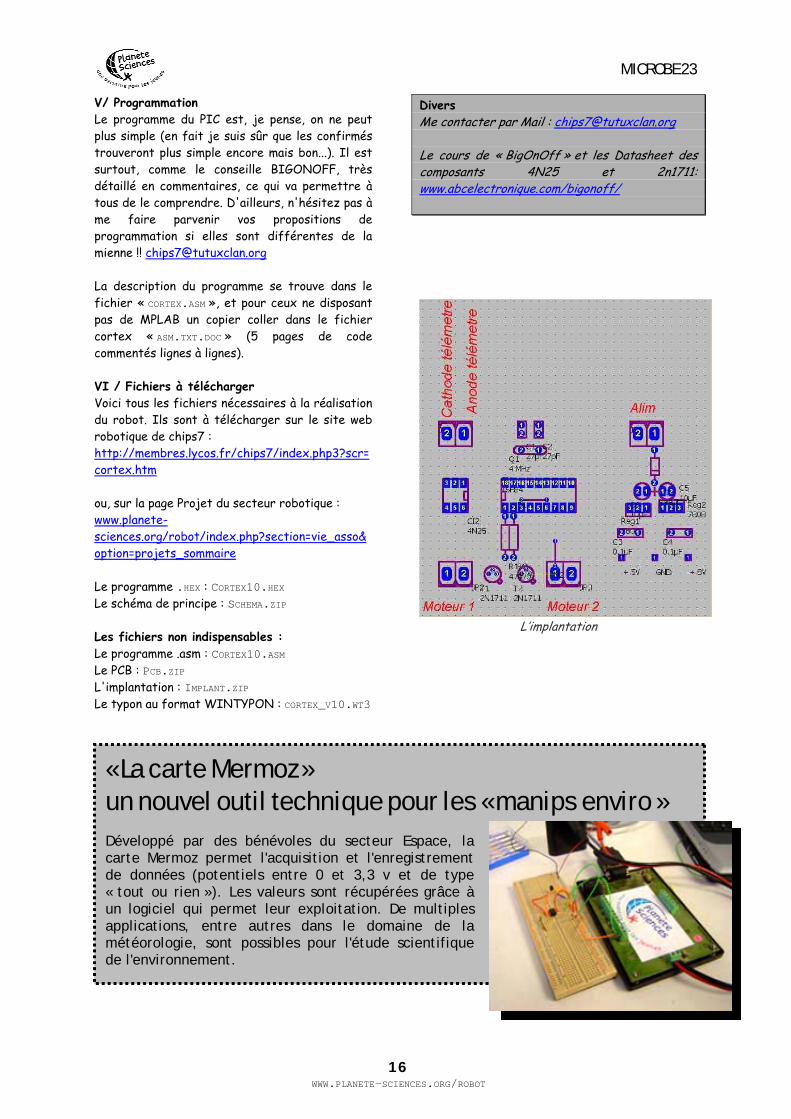
II/ Détection des obstacles Voilà une partie importante me direz-vous... Oui vous répondrai-je ! Pour le moment, je n'ai muni Cortex que d'un simple détecteur à ultra-sons placé en avant du châssis. Ainsi, lorsque Cortex s'approche trop près d'un mur, le PIC qui sert de cerveau et situé à l’arrière du robot va lui envoyer l'ordre de tourner pour l'éviter, puis l’ordre de continuer tout droit. Ce principe est avantageux dans la mesure où il évite l'obstacle à l'avance, mais beaucoup moins, lorsque l'on sait que seuls les obstacles bien francs sont correctement détectés : mur, meuble... La prochaine version sera munie de bien plus de capteurs, ne vous inquiétez pas !!! (Hé, j'apprends en même tant que vous :o) III/ Alimentation Lors des essais, j'ai branché Cortex sur un petit adaptateur secteur positionné sur 9 volts afin d'éviter de vider inutilement mon jeu de batteries rechargeables. Une fois terminé votre robot, je conseille plutôt 7 accumulateurs rechargeables de 1,2 volts, à relier en série... De toute façon, la carte du robot dispose d'un régulateur 5 volts interne pour alimenter le PIC. Même si vous mettez du 12 Volts, ça ne lui fera rien !! Les moteurs LEGOTM fonctionnant sous 9 volts, j'ai par précaution ajouté un régulateur 8 volts pour essayer d'avoir un ensemble assez stable, mais ce n’est pas indispensable... IV/ Electronique Enfin !!! Bon, la partie électronique c'est tout simple : on a 2 petits régulateurs de 5 et 8 volts, filtrés par les condensateurs de 10 et 0.1 microfarads (mis en évidence sur le schéma, dans le cadre rose A). Le premier régulateur sert à alimenter le PIC, et le télémètre à ultra son. Le second régulateur sert aux moteurs. Le télémètre était à la base censé allumer une diode éléctro-luminescente (DEL), lors de la détection d’un obstacle (cadre bleu B). Je l'ai remplacé par un basique photo coupleur 4N25, et ainsi je peux directement me servir du régulateur+5V, pour créer l’instruction d'interruption pour le PIC. Les 2 moteurs sont commandés par le PIC, via deux transistors PNP 2N1711 (cadre jaune C) qui servent d’interface de puissance pour commander les moteurs électriques. La base de temps du PIC est faite par un quartz 4MHz, suivi de 2 condensateurs de 27pF préconisés par le constructeur dans sa notice d’utilisation (Datasheet en anglais) (cadre orange D). Pour le reste, voir le schéma. Je mets également à disposition un schéma de câblage appelé aussi PCB, pour ceux qui voudraient s'arrêter là...
Les deux moteurs ainsi fixés aux roues, voilà ce que ça donne, vu de derrière Le Typon
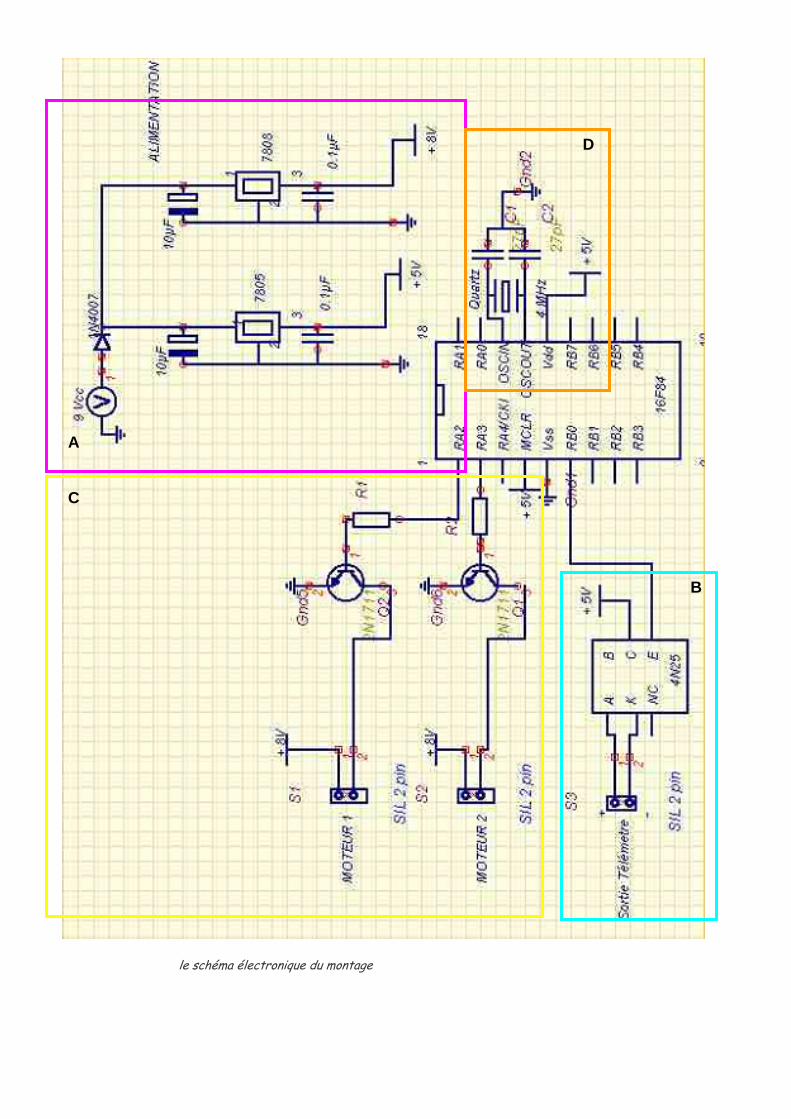
le schéma électronique du montage
A C
B
D
MICROBE 23
16 WWW.PLANETE-SCIENCES.ORG/ROBOT
V/ Programmation Le programme du PIC est, je pense, on ne peut plus simple (en fait je suis sûr que les confirmés trouveront plus simple encore mais bon...). Il est surtout, comme le conseille BIGONOFF, très détaillé en commentaires, ce qui va permettre à tous de le comprendre. D'ailleurs, n'hésitez pas à me faire parvenir vos propositions de programmation si elles sont différentes de la mienne !! [email protected] La description du programme se trouve dans le fichier « CORTEX.ASM », et pour ceux ne disposant pas de MPLAB un copier coller dans le fichier cortex « ASM.TXT.DOC » (5 pages de code commentés lignes à lignes). VI / Fichiers à télécharger Voici tous les fichiers nécessaires à la réalisation du robot. Ils sont à télécharger sur le site web robotique de chips7 : http://membres.lycos.fr/chips7/index.php3?scr=cortex.htm ou, sur la page Projet du secteur robotique : www.planete-sciences.org/robot/index.php?section=vie_asso&option=projets_sommaire Le programme .HEX : CORTEX10.HEX Le schéma de principe : SCHEMA.ZIP Les fichiers non indispensables : Le programme .asm : CORTEX10.ASM Le PCB : PCB.ZIP L'implantation : IMPLANT.ZIP Le typon au format WINTYPON : CORTEX_V10.WT3
Divers Me contacter par Mail : [email protected] Le cours de « BigOnOff » et les Datasheet des composants 4N25 et 2n1711: www.abcelectronique.com/bigonoff/
L’implantation
« La carte Mermoz » un nouvel outil technique pour les « manips enviro » Développé par des bénévoles du secteur Espace, la carte Mermoz permet l'acquisition et l'enregistrement de données (potentiels entre 0 et 3,3 v et de type « tout ou rien »). Les valeurs sont récupérées grâce à un logiciel qui permet leur exploitation. De multiples applications, entre autres dans le domaine de la météorologie, sont possibles pour l'étude scientifique de l'environnement.
MICROBE 23
17 WWW.PLANETE-SCIENCES.ORG/ROBOT
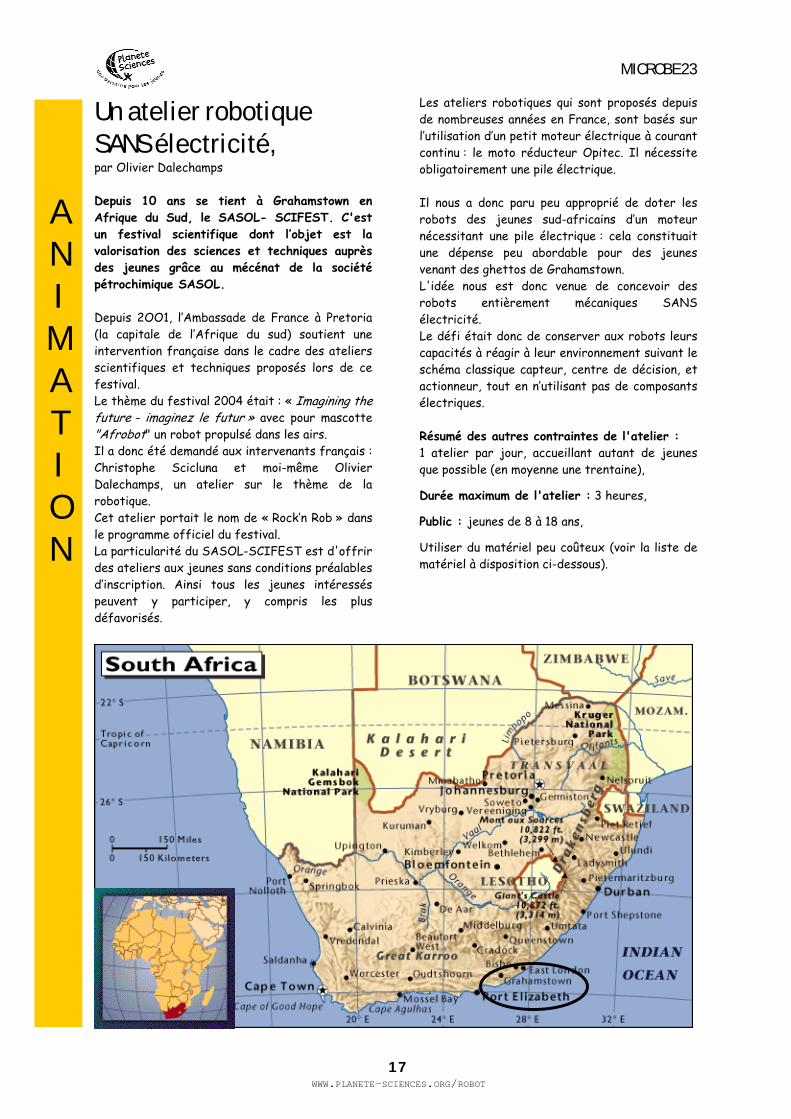
Un atelier robotique SANS électricité, par Olivier Dalechamps Depuis 10 ans se tient à Grahamstown en Afrique du Sud, le SASOL- SCIFEST. C'est un festival scientifique dont l’objet est la valorisation des sciences et techniques auprès des jeunes grâce au mécénat de la société pétrochimique SASOL. Depuis 2OO1, l’Ambassade de France à Pretoria (la capitale de l’Afrique du sud) soutient une intervention française dans le cadre des ateliers scientifiques et techniques proposés lors de ce festival. Le thème du festival 2004 était : « Imagining the future - imaginez le futur » avec pour mascotte "Afrobot" un robot propulsé dans les airs. Il a donc été demandé aux intervenants français : Christophe Scicluna et moi-même Olivier Dalechamps, un atelier sur le thème de la robotique. Cet atelier portait le nom de « Rock’n Rob » dans le programme officiel du festival. La particularité du SASOL-SCIFEST est d'offrir des ateliers aux jeunes sans conditions préalables d’inscription. Ainsi tous les jeunes intéressés peuvent y participer, y compris les plus défavorisés.
Les ateliers robotiques qui sont proposés depuis de nombreuses années en France, sont basés sur l’utilisation d’un petit moteur électrique à courant continu : le moto réducteur Opitec. Il nécessite obligatoirement une pile électrique. Il nous a donc paru peu approprié de doter les robots des jeunes sud-africains d’un moteur nécessitant une pile électrique : cela constituait une dépense peu abordable pour des jeunes venant des ghettos de Grahamstown. L'idée nous est donc venue de concevoir des robots entièrement mécaniques SANS électricité. Le défi était donc de conserver aux robots leurs capacités à réagir à leur environnement suivant le schéma classique capteur, centre de décision, et actionneur, tout en n’utilisant pas de composants électriques. Résumé des autres contraintes de l'atelier : 1 atelier par jour, accueillant autant de jeunes que possible (en moyenne une trentaine),
Durée maximum de l'atelier : 3 heures,
Public : jeunes de 8 à 18 ans,
Utiliser du matériel peu coûteux (voir la liste de matériel à disposition ci-dessous).
AN I
MAT ION
MICROBE 23
18 WWW.PLANETE-SCIENCES.ORG/ROBOT
Objectifs : - Avoir un robot fonctionnel à garder à la fin de l'atelier, - N'utiliser ni kit, ni manuel, ne faire appel qu’aux connaissances et à l’imagination personnelle des participants de l'atelier, - Avoir un contenu scientifique et pédagogique. Matériel à disposition : Elastiques, attaches parisiennes, punaises, bouchons de liège, piques à brochettes, mousses diverses, scotch, pistocolle, cartons divers, pailles, plaque de plastique ondulé, bouchons de tubes de protection en carton pour les expédition d’affiches, petits roulements à bille de récupération (utilisés uniquement comme lest), trombones, vrilles, ciseaux, feutres.
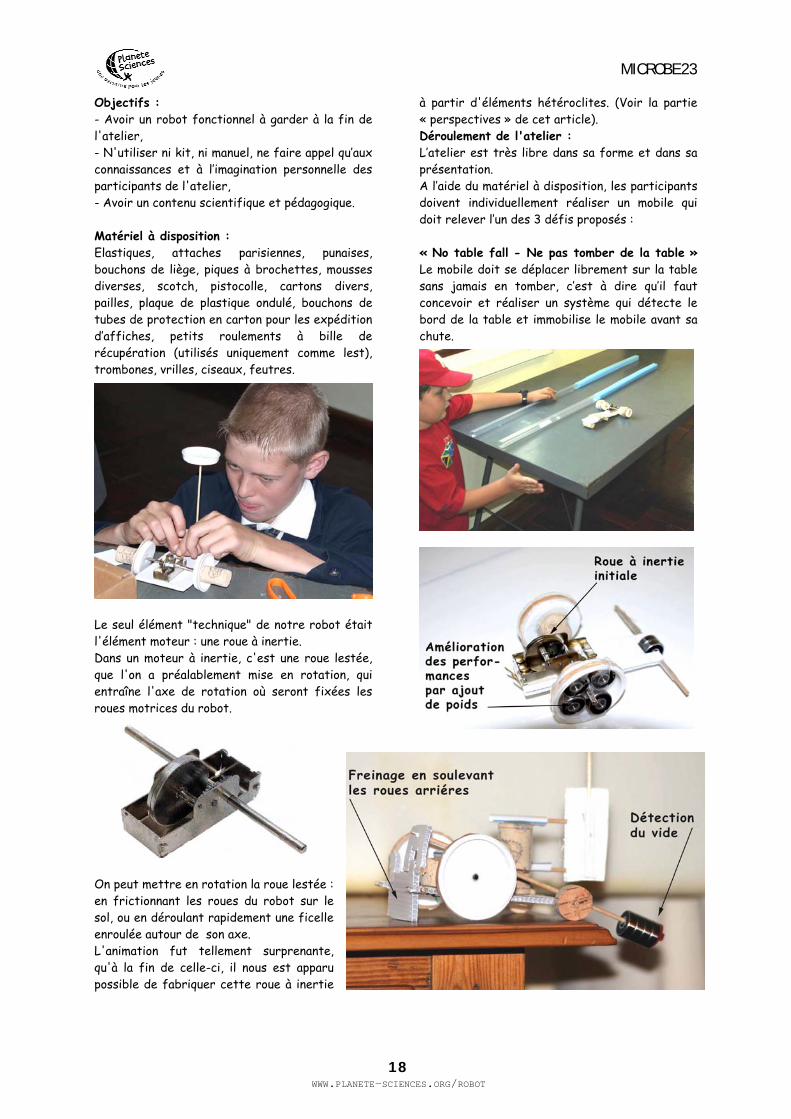
Le seul élément "technique" de notre robot était l'élément moteur : une roue à inertie. Dans un moteur à inertie, c'est une roue lestée, que l'on a préalablement mise en rotation, qui entraîne l'axe de rotation où seront fixées les roues motrices du robot.
On peut mettre en rotation la roue lestée : en frictionnant les roues du robot sur le sol, ou en déroulant rapidement une ficelle enroulée autour de son axe. L'animation fut tellement surprenante, qu'à la fin de celle-ci, il nous est apparu possible de fabriquer cette roue à inertie
à partir d'éléments hétéroclites. (Voir la partie « perspectives » de cet article). Déroulement de l'atelier : L’atelier est très libre dans sa forme et dans sa présentation. A l’aide du matériel à disposition, les participants doivent individuellement réaliser un mobile qui doit relever l’un des 3 défis proposés : « No table fall - Ne pas tomber de la table » Le mobile doit se déplacer librement sur la table sans jamais en tomber, c’est à dire qu’il faut concevoir et réaliser un système qui détecte le bord de la table et immobilise le mobile avant sa chute.
MICROBE 23
19 WWW.PLANETE-SCIENCES.ORG/ROBOT
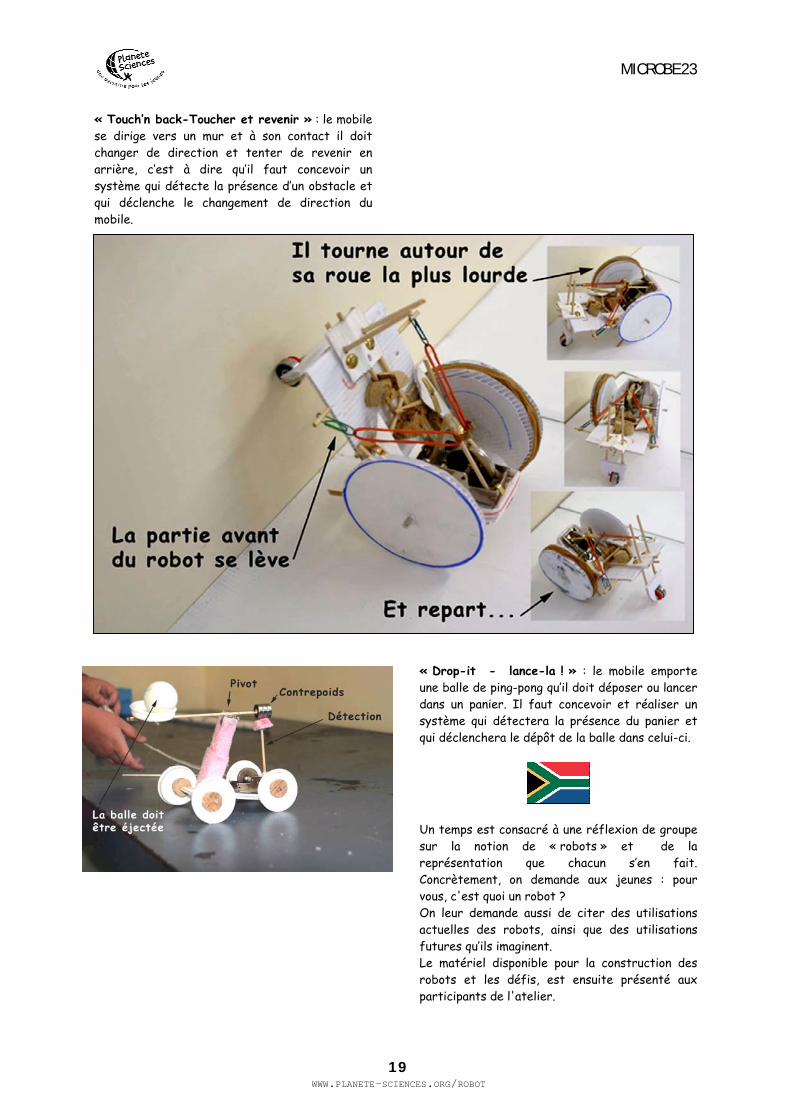
« Touch’n back-Toucher et revenir » : le mobile se dirige vers un mur et à son contact il doit changer de direction et tenter de revenir en arrière, c’est à dire qu’il faut concevoir un système qui détecte la présence d’un obstacle et qui déclenche le changement de direction du mobile.
« Drop-it - lance-la ! » : le mobile emporte une balle de ping-pong qu’il doit déposer ou lancer dans un panier. Il faut concevoir et réaliser un système qui détectera la présence du panier et qui déclenchera le dépôt de la balle dans celui-ci.
Un temps est consacré à une réflexion de groupe sur la notion de « robots » et de la représentation que chacun s’en fait. Concrètement, on demande aux jeunes : pour vous, c'est quoi un robot ? On leur demande aussi de citer des utilisations actuelles des robots, ainsi que des utilisations futures qu’ils imaginent. Le matériel disponible pour la construction des robots et les défis, est ensuite présenté aux participants de l'atelier.

MICROBE 23
20 WWW.PLANETE-SCIENCES.ORG/ROBOT
Les animateurs présentent des systèmes mécaniques simples à réaliser (transformation de mouvement), et réfléchissent avec les jeunes à d’autres systèmes dont ils auront besoin pour réaliser les défis qu'ils ont choisis. Les enfants partent ensuite dans leur réalisation. Ils n'ont pas d'instructions précises ni de notice, les animateurs sont présents pour les assister et ne répondent qu’aux questions de réalisation pratique. Ce type d'atelier robotique nécessite une bonne maîtrise des mécanismes en tout genre, et de bonnes notions de mécanique/dynamique. L’atelier nécessite la préparation en amont de maquettes de tous les types de mécanique de base présentant les transformations de mouvements et qui seront présentés au cours de l’atelier. Ces montages doivent êtres clairs afin de bien expliquer les différentes transformation et transmission de mouvement : système de came, de levier, de bielle-manivelle, etc.… Le succès global de l’animation est très dépendant des premières minutes de l'atelier. Les enfants se sentent parfois perdus, tandis qu’on ne leur donne aucune réelle indication pour réaliser leur robot. Il faut donc les mettre en confiance en faisant appel à leurs connaissances pré-existantes et à leur imagination dans le discours introductif. On se base pour cela sur les maquettes de mécanismes présentées, mais aussi sur des objets de leur vie de tout les jours, les engrenages de leur chaîne de vélo, la bielle-manivelle des trains à vapeur qu'ils voient dans les films… Perspectives : Les jeunes ont vite compris le principe du moteur à inertie (accumulation d'énergie par une masse qui tourne). Ils ont d'eux-mêmes amélioré les performances inertielles de la roue initiale, en alourdissant les roues de leur véhicule. Il nous est alors apparu qu'il pourrait être possible de construire nous-mêmes une roue à inertie, en disposant seulement d'engrenages. Cette perspective reste à tester. Le principe de roue à inertie peut être amélioré : restitution de l'énergie plus progressive, possibilité d’arrêter la roue, utilisation d'un mécanisme pour la lancer, utilisation d'un ressort à spirale pour améliorer les performances, etc… Conclusion : Cet atelier fut très enrichissant à bien des égards.
Il permet d'aborder la partie mécanique de la robotique de façon séparée de la partie électricité. Ne pas utiliser de moteur ou d'interrupteur, libère l'imagination et permet la naissance d'idées de mécanismes très originaux. Ce type d'atelier permet aussi d'aborder la robotique, même dans le cas où le budget accordé à l'atelier est très limité.
Sources cartes : http://go.hrw.com/atlas/norm_htm/safrica.htm Moteur à inertie : www.opitec.fr Coût 2.70€ Le site de la SASOL – SIFEST : www.scifest.org.za/previous.html Retrouvez cet article et toutes les photos sur la page « PROJETS DES ADHERENTS » www.planete-sciences.org/robot/ index.php?section=vie_asso&option=projets

MICROBE 23
21 WWW.PLANETE-SCIENCES.ORG/ROBOT
Visite au « Paradis de la robotique » Jean-Roland Tartas, dix sept an et demi, vient de créer sa junior association « Le paradis de la robotique », avec l’aide de ses anciens animateurs Abdelaziz et Copariate « gardien des clés et maton selon les cas… » de la maison des jeunes de Meulan (78), et de Dominique Maronnier permanente de Planète Sciences Île-de-France (91). Voici un récit de la genèse de ce club.
Historique Jean-Roland est un nouveau venu dans la ville de Meulan (78). Après un an d’adaptation à sa nouvelle ville, il décide de participer aux ateliers de la
maison de quartier du « Paradis ». Au sein de la maison de quartier, Abdelaziz, l’un des animateurs, lui propose de participer à un tout nouvel atelier sciences et techniques dont il a eu l’initiative, avec entre autres de la robotique. Immédiatement Jean-Roland est enthousiaste : cela faisait très longtemps qu’il souhaitait faire de la robotique, car déjà très jeune il était un téléspectateur fan de l’émission « E=M6 spécial robotique ». Pour Jean-Roland cette passion s’était déjà traduite par un engagement scolaire envers les sciences et technique, grâce à un BEP électromécanique. Un choix personnel pour pouvoir aborder concrètement la robotique qui le passionne. En 2002, pour sa première année, l’atelier robotique était subventionné par la mairie de Meulan. C’est ce soutien initial qui a permis la venue d’un animateur de Planète Sciences sur un an, mais aussi l’achat par la ville d’une malle atelier robotique MARIE*. Abdelaziz, devenu entre temps référent de l’atelier robotique, suivait l’atelier toutes les semaines. La deuxième année, le suivi de l’équipe par l’animateur de Planète Sciences s’est espacé de 15 jours en 15 jours. Sa venue se faisait en alternance une semaine sur deux, avec la présence continue des animateurs de la maison de quartier : ce fonctionnement participait à l’objectif de tendre à une autonomie complète du
club par disparition progressive du soutien de l’animateur spécialisé. Le club a participé aux Trophées de Robotique d’Ile–de-France et a réussi dès la première année à se positionner en milieu de classement, puis à se maintenir ainsi les années suivantes dans l’une des qualifications régionales les plus difficiles. Grâce à Planète Sciences, en 2004 Jean-Roland a pu partir une semaine représenter la France, sa ville, son club, et les Trophées de Robotique à la « Science Fair » de Berlin et ce à l’invitation de l’Ambassade de France en Allemagne. La participation à cette manifestation exceptionnelle, qui permet aux laboratoires universitaires allemands de faire la promotion de leurs activités, a remporté un vif succès auprès du public. Jean-Roland est donc parti avec Ductri, un autre jeune de son âge et Florian un bénévole de Planète Sciences. Jean-Roland s’est affirmé comme animateur à la « Science Fair » et de fait, il a poursuivi cette année l’expérience, en devenant animateur BAFA sur un séjours de vacances… en robotique bien sûr ! 2004 : pour sa la troisième année, le club fonctionne en totale autonomie. La vie du club est très orientée par les concours de Robotique de Planète Sciences puisque l’atelier débute en octobre avec la parution du règlement des Trophées de robotique et s’arrête après sa participation et la réunion de débriefing. Au quotidien Jean-Roland réinvestit ses connaissances scolaires dans la réalisation du robot, de même que les autres membres du club :
CLUB
Stand à la SCIFAIR de Berlin

MICROBE 23
22 WWW.PLANETE-SCIENCES.ORG/ROBOT
la trigonométrie pour calculer les pièces du robot, la loi d’Ohm pour la puissance des moteurs…
Le robot des Trophées de robotique 2004
Le constat actuel est que les membres du club manquent d’une formation pédagogique et technique pour progresser. Ils souhaiteraient le retour d’un animateur Planète Sciences ou être eux-mêmes formés aux outils techniques et à la pédagogie de l’association ; leur problème est d’ordre financier.
La constitution de la Junior association Dès la création de l’atelier robotique en 2002, les animateurs avaient pour objectif d’amener les jeunes participants à une autonomie et donc à la création d’une association. C’est le hasard qui fait découvrir à Adelaziz un groupe de jeunes de la banlieue des Yvelines qui vivaient seuls pendant les vacances, sur un terrain de camping, avec un animateur qui ne venait les voir que le soir ! Curieux non, me direz-vous ? Des « sauvageons » en liberté ?!!! Là, l’animateur du groupe explique le principe de la « Junior association » et le projet des jeunes campeurs. Le résultat de cette organisation est une réelle autonomie de vie, et de gestion du groupe par les adolescents eux-même. En octobre 2004 Adelaziz décide donc de passer à l’acte : non, non rien de grave ! Il se renseigne sur le statut des Juniors associations et entame avec Dominique et Jean Roland, la constitution du dossier de création : un mois plus tard l’association existait.
Les conditions de création Une junior association doit comporter au minimum 51% de ses membres adhérents mineurs.
Les principales difficultés La création de la Junior association ne dédouane pas les adultes de leurs responsabilités : un adulte doit suivre la Junior association, ne serait ce que pour le compte bancaire commun à l’association. Il faut trouver un local où entreposer le matériel et surtout où pratiquer l’atelier dans de bonnes conditions. Il faut trouver un moyen de subventionner l’achat de matériel pour l’activité. Il faut renouveler tous les ans le statut de la Junior association, en déposant un dossier. L’organisation interne de la Junior association Une Junior association est une association simplifiée : pas de bureau (président, trésorier, secrétaire… ) pas de déclaration en préfecture, il est seulement demandé à ses membres de remplir un dossier. Il est demandé aux jeunes de faire un planning d’activités et de monter le budget de fonctionnement de leur association. Un membre du réseau des Juniors associations assure le suivi du dossier de l’association en cours de création et l’aide dans ses autres démarches.
Au quotidien les jeunes s’organisent par eux-mêmes : les décisions de stratégies de jeu et de construction du robot sont prises en commun ; pour les permanences du club et l’ouverture du local, c’est Jean-Roland du haut de ses dix sept ans (et demi … oui je sais Jean-Roland !), ou son frère Emeric (14 ans), qui assurent l’ouverture et le respect des règles établies. Aucun problème de voisinage ou de dégradation n’est à signaler dans ce local autogéré. La consigne est stricte et a été donnée par Adelaziz le premier jour : le local sert à l’atelier robotique et c’est tout ; on n’y fait venir que les adhérents potentiels du club. Tous ont immédiatement adhéré à ces règles de bon sens. Chaque samedi c’est une ambiance studieuse (et glacée … pas de chauffage ! Brrr !!!) qui règne dans l’atelier ! Seul Jacques, retraité de l’aérospatiale, dénote un peu dans le groupe des cinq jeunes, mais il fait partager son expérience et profiter de ses relations dans le quartier pour obtenir le soutien nécessaire que doit avoir un club comme celui-ci. Mais que l’on ne s’y trompe pas : le boss du club c’est Jean-Roland !

MICROBE 23
23 WWW.PLANETE-SCIENCES.ORG/ROBOT
Photo des jeunes roboticiens
Le budget du club Actuellement le club n’a pas de soutien financier extérieur et les membres du club cotisent pour l’achat des pièces de leur robot. Une aide vient toutefois de deux entreprises artisanales de Meulan. Elles offrent directement du matériel : l’AICP offre des bandes de caoutchouc permettant la réalisation des chenilles du robot et Monsieur AMAG, mécanicien spécialisé, offre ses chutes d’aluminium. Le club profite également de la générosité de dons de vieux jouets radiocommandés, bien utiles pour leurs moteurs et leurs roues. La mairie de Meulan a prêté la malle atelier robotique MARIE et l’association CMC prête gracieusement le local. Pour son fonctionnement, le club a dû créer un compte bancaire pour la gestion courante de l’argent de l’association. Les membres de l’association étant mineurs, ils ne peuvent pas avoir de compte au nom de l’association, mais en leur nom propre. Il faut donc qu’un adulte crée ce compte bancaire avec le jeune au profit de l’association. Heureusement, quelques banques ont passé un accord avec le réseau des Juniors associations. Cela permet de simplifier les démarches de création de ce compte. Pour la paperasserie et les comptes, c’est Guillaume l’un des membres de l’association qui s’y colle (comme quoi la passion des maths et de la comptabilité ne viennent pas toujours d’où l’on pense !). Et après ? Une Junior association a pour objectif d’amener le groupe des jeunes mineurs à la création d’une véritable association un peu plus tard… une fois la limite des 51% de jeunes majeurs atteinte. Actuellement Jean-Roland estime avoir beaucoup appris de cette expérience et ne regrette en rien ce choix : il le conseille même à tous les jeunes qui, comme lui, veulent réaliser leur projet :
« Parce que, avec la Maison de Quartier, c’était bien ce que l’on faisait,… mais là, … c’est … différent… et MIEUX !!! » Le bilan des animateurs « Cette expérience était une prise de risque personnelle pour nous » m’ont dit les animateurs. «L’association ne se serait sans doute pas faite, si nous n’y avions pas été
contraints : la disparition du service jeunesse de la ville, m’a mis au chômage ainsi que tous les autres animateurs et cela au moment même où le groupe des jeunes se constituait réellement ! C’était très motivant de poursuivre jusqu’au bout l’expérience de cet atelier robotique. » De fait les animateurs de l’ex-maison de quartier sont devenus de simples citoyens bénévoles. Ils ont poursuivi leurs actions pédagogiques auprès du groupe des jeunes pour les amener à se prendre en charge au travers de la Junior association « le paradis de la robotique ».
Copariate, Abdelaziz, et Dominique le reconnaissent : si les faits s’étaient passé autrement, le club se serait-il constitué ? Auraient-ils pris ces risques ? Mais seraient-ils arrivés à un tel résultat avec les jeunes ? Quoi qu’il en soit, c’est une belle réussite commune !
Plus d’informations sur … * Malle atelier MARIE : www.planete-sciences.org/robot/index.php?section=ressources&option=produits
Le club « Paradis de la robotique » : Guillaume Thebaud 4 allée des trèfles 78250 Meulan
L’association Planète Sciences Île-de-France : www.planete-sciences.org/iledefrance
Le réseau des juniors associations : www.juniorassociation.org/index.php
Les Trophées de Robotique : www.planete-sciences.org/robot/concours/trophees/trophees.html
Interview réalisée le 29 janvier 2005,
Par un froid de canard et par Gwénaël Forestier
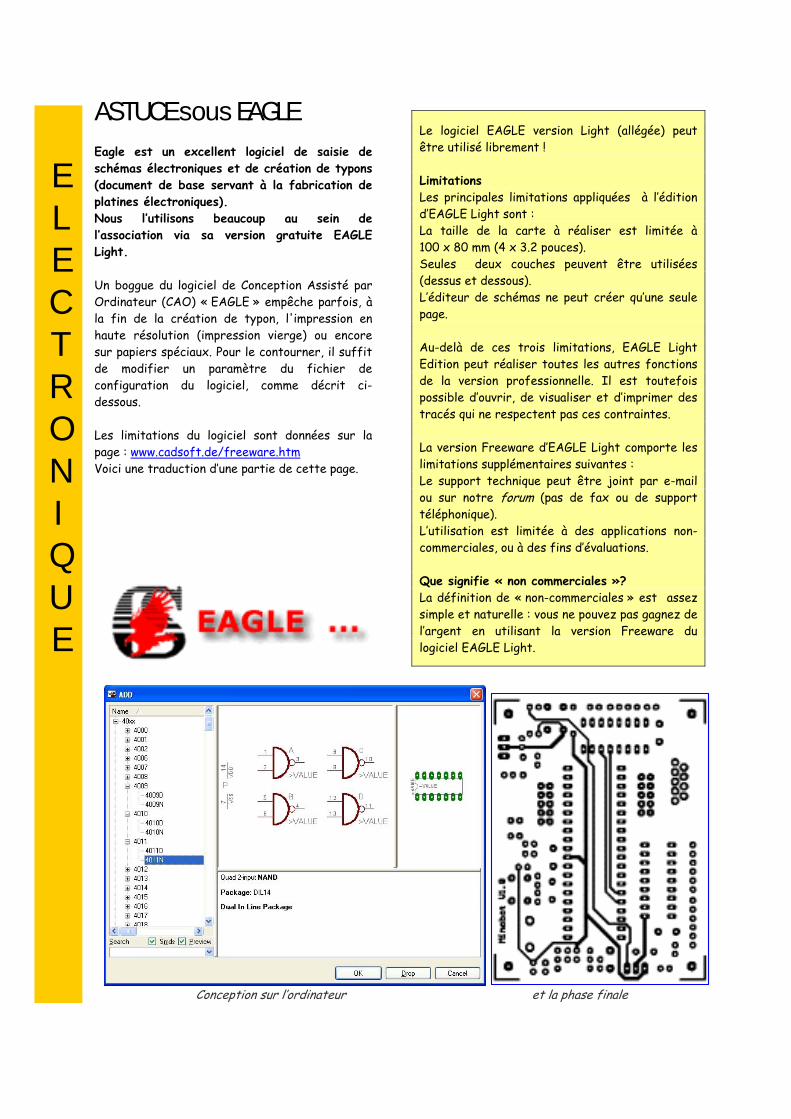
ASTUCE sous EAGLE Eagle est un excellent logiciel de saisie de schémas électroniques et de création de typons (document de base servant à la fabrication de platines électroniques). Nous l’utilisons beaucoup au sein de l’association via sa version gratuite EAGLE Light. Un boggue du logiciel de Conception Assisté par Ordinateur (CAO) « EAGLE » empêche parfois, à la fin de la création de typon, l'impression en haute résolution (impression vierge) ou encore sur papiers spéciaux. Pour le contourner, il suffit de modifier un paramètre du fichier de configuration du logiciel, comme décrit ci-dessous. Les limitations du logiciel sont données sur la page : www.cadsoft.de/freeware.htm Voici une traduction d’une partie de cette page.
Le logiciel EAGLE version Light (allégée) peut être utilisé librement ! Limitations Les principales limitations appliquées à l’édition d’EAGLE Light sont : La taille de la carte à réaliser est limitée à 100 x 80 mm (4 x 3.2 pouces). Seules deux couches peuvent être utilisées (dessus et dessous). L’éditeur de schémas ne peut créer qu’une seule page. Au-delà de ces trois limitations, EAGLE Light Edition peut réaliser toutes les autres fonctions de la version professionnelle. Il est toutefois possible d’ouvrir, de visualiser et d’imprimer des tracés qui ne respectent pas ces contraintes. La version Freeware d’EAGLE Light comporte les limitations supplémentaires suivantes : Le support technique peut être joint par e-mail ou sur notre forum (pas de fax ou de support téléphonique). L’utilisation est limitée à des applications non-commerciales, ou à des fins d’évaluations. Que signifie « non commerciales »? La définition de « non-commerciales » est assez simple et naturelle : vous ne pouvez pas gagnez de l’argent en utilisant la version Freeware du logiciel EAGLE Light.
Conception sur l’ordinateur et la phase finale
E L ECTRON IQUE
MICROBE 23
25 WWW.PLANETE-SCIENCES.ORG/ROBOT
Le BOGGUE Rien n’est jamais parfait et ce logiciel ne déroge pas à la règle : aussi y a-t-il quelques petites erreurs de conception. Heureusement la forte communauté des utilisateurs de ce logiciel ont trouvé et résolu certains de ces petits problèmes ou boggues ! C’est bien là un des avantages de la communauté des utilisateurs de Freeware (gratuits) ! Action Vous venez donc de découvrir que le logiciel à un problème, maintenant agissons pour le corriger ! FERMER, le logiciel EAGLE. OUVRIR, le fichier suivant avec un éditeur de texte comme le bloc-notes : EAGLERC.USR Ce fichier se trouve dans… un répertoire qui n’a pas arrêté de changer lors de mes différentes installations successives ! Il s’agit parfois de : C:\PROGRAM FILES\EAGLE-4.11 Parfois, le répertoire désigné se trouve dans : MES DOCUMENTS… Donc le seul moyen restant à votre disposition est de rechercher ce fichier sur le disque dur de votre ordinateur. Un problème supplémentaire apparaît lorsque ce fichier est présent en plusieurs exemplaires sur l’ordinateur. Il vous faudra prendre le fichier dont la « date de modification » est modifiée à chaque fois qu’on ferme EAGLE. Une fois ce fichier trouvé, OUVREZ-le. Cherchez la ligne PRINTER.INTERNALRENDERING = "NNN" (où NNN désigne une valeur numérique à un ou plusieurs chiffres). Modifiez la ligne de la manière suivante PRINTER.INTERNALRENDERING = "255" Si cette ligne n’existe pas, vous pouvez la créer a priori n’importe où dans le fichier.
ENREGISTREZ la modification et QUITTEZ. OUVREZ le logiciel EAGLE. IMPRIMEZ à nouveau votre document.
En clair, ce paramètre force EAGLE à générer une image bitmap (.BMP) dans sa mémoire vive (RAM) avant d’envoyer celle-ci à l'imprimante et ce pour tous les systèmes d’exploitation (c’est la signification de la valeur 255). Le tour est joué !
Thierry Ressources : Logiciel EAGLE : www.interq.or.jp/japan/se-inoue/e_eagle.htm Zone de téléchargement : www.cadsoft.de/cgi-bin/download.pl?page=/home/cadsoft/html_public/download.htm.en&dir=pub/program/4.1 Tutorial en Français : www.jelectronique.com/eagle.php Rédaction : Thierry Coquart Commission base technique [email protected].
Secteur robotique
Trophées - Aline, au 01.69.02.76.18 E-Mail : [email protected] Eurobot / Coupe de France et le secteur Aïala, au 01.69.02.76.11 E-mail : [email protected] Les formations, les animations, les publications, le Club robotique - à Ris-Orangis (91). Gwénaël, au 01.69.02.76.12 E-Mail : [email protected]
MICROBE 23
26 WWW.PLANETE-SCIENCES.ORG/ROBOT