Embed Size (px)
Citation preview

Événement - date
JNRR, 4-6 novembre 2009 P. Lutz
Microrobotique pour composants micrométriques : les challenges pour leur manipulation et leur assemblage
Philippe Lutz, Michaël GauthierFEMTO-ST
Département AS2M
Stéphane RégnierISIR
Événement - date
2JNRR, 4-6 novembre 2009 P. Lutz
• Introduction
• Les structures microrobotiques
• La préhension
• La perception
• Les stations de micromanipulation et de micro-assemblage
• Vers la nanorobotique
Microbotique pour composants micrométriques

Événement - date
3JNRR, 4-6 novembre 2009 P. Lutz
Introduction : le contexte de la micromanipulation
Etude de la manipulation des objets d’une taille caractéristique entre 1µm et 1mm.1µm 10µm 100µm 1mm
Microscopie optiqueElectronic scanning
Microfabrication Fabrication mécanique
Prédominance des effets de surface
200 µm
ovocytebacterium
2-6 µm
pollen
20-40 µm
lymphocyte
6-15 µm
prothèse auditive
1 mm
engrenage
800 µm
Nanotube de carbone
Diametre: 100 nm
anneau
130 µm30
0µm
10 µm
Lentille sur support
500 µm
miroir spectromètre
Systèmes assemblés
Événement - date
4JNRR, 4-6 novembre 2009 P. Lutz
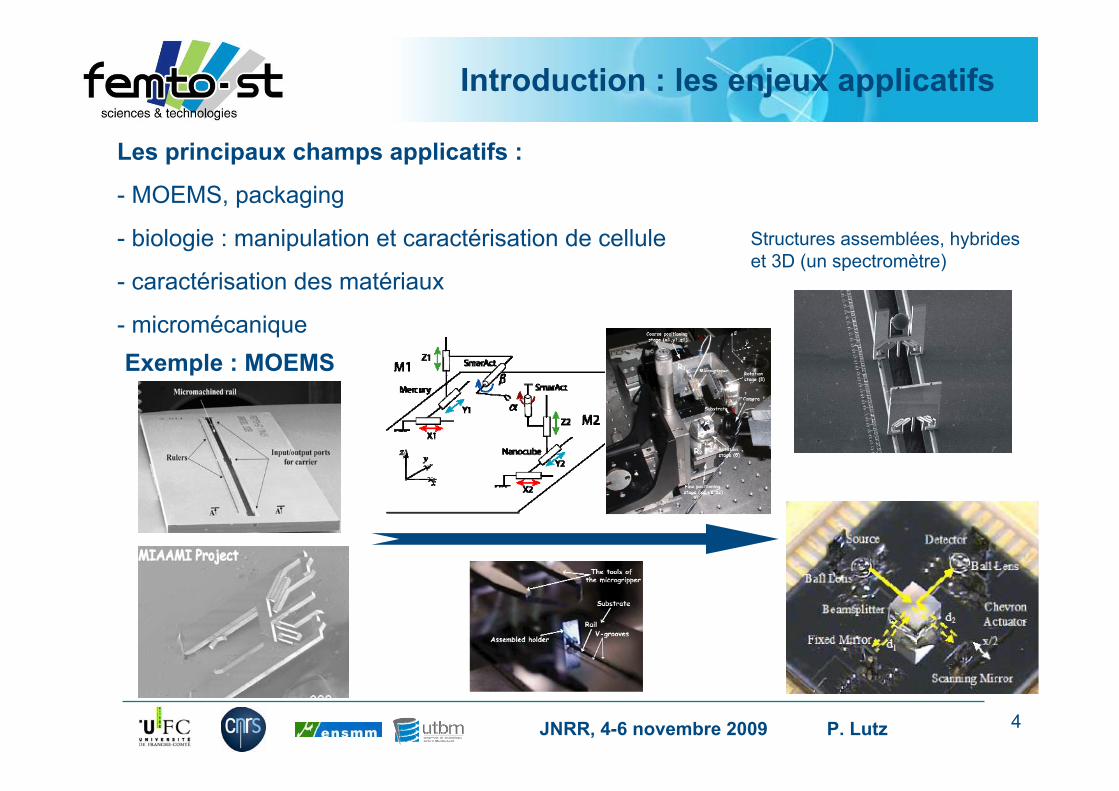
Introduction : les enjeux applicatifs
Les principaux champs applicatifs :
- MOEMS, packaging
- biologie : manipulation et caractérisation de cellule
- caractérisation des matériaux
- micromécaniqueExemple : MOEMS
Structures assemblées, hybrides et 3D (un spectromètre)
Événement - date
5JNRR, 4-6 novembre 2009 P. Lutz
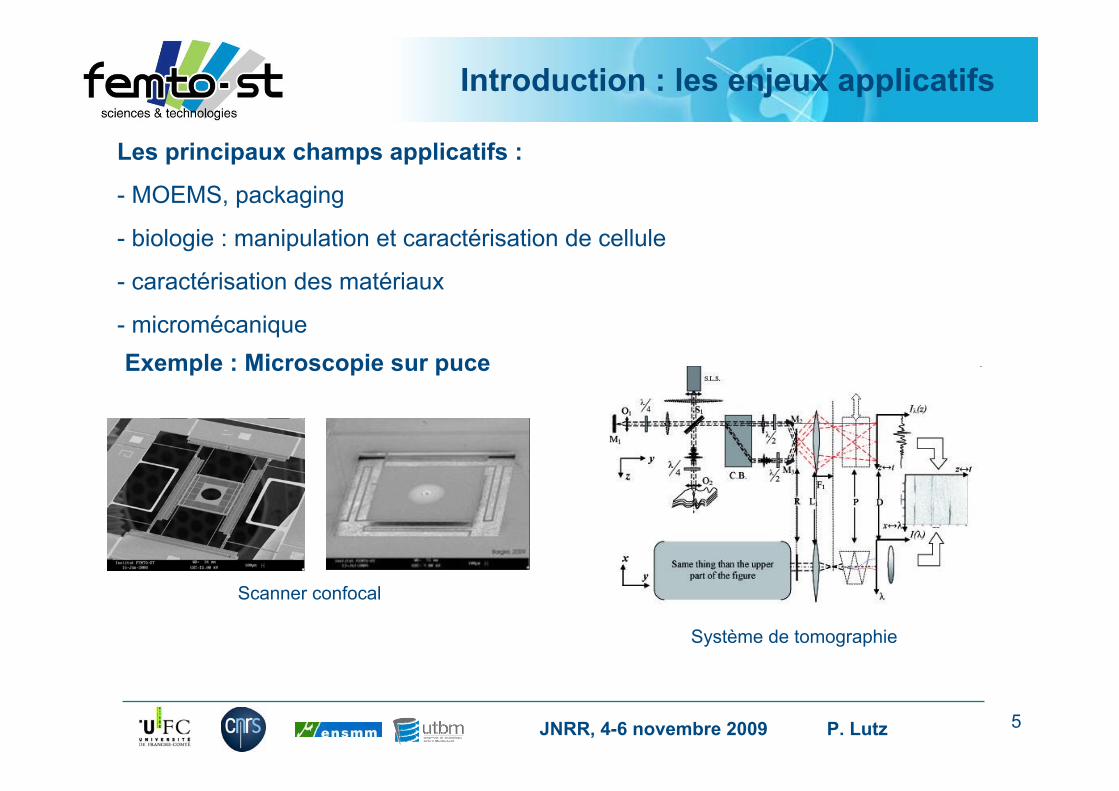
Introduction : les enjeux applicatifs
Les principaux champs applicatifs :
- MOEMS, packaging
- biologie : manipulation et caractérisation de cellule
- caractérisation des matériaux
- micromécaniqueExemple : Microscopie sur puce
Scanner confocal
Système de tomographie
Événement - date
6JNRR, 4-6 novembre 2009 P. Lutz
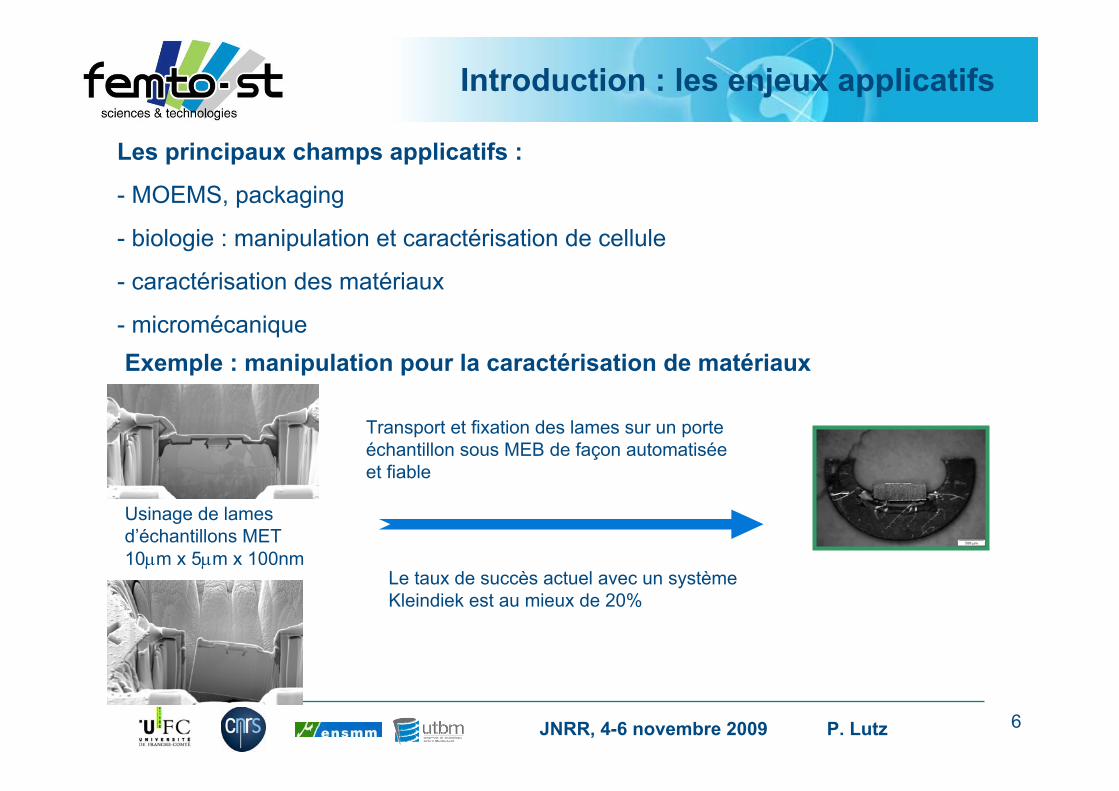
Introduction : les enjeux applicatifs
Les principaux champs applicatifs :
- MOEMS, packaging
- biologie : manipulation et caractérisation de cellule
- caractérisation des matériaux
- micromécaniqueExemple : manipulation pour la caractérisation de matériaux
Usinage de lames d’échantillons MET10μm x 5μm x 100nm
Transport et fixation des lames sur un porte échantillon sous MEB de façon automatisée et fiable
Le taux de succès actuel avec un système Kleindiek est au mieux de 20%

Événement - date
7JNRR, 4-6 novembre 2009 P. Lutz
Introduction : les champs de recherche
Systèmes microrobotiques et adaptroniques :
- les structures microrobotiques
- la préhension
- la manipulation sans contactAutomatique et microrobotique :
- commande de systèmes à S/B défavorable, non linéaires
- commande de systèmes à grande dynamique
- commande de systèmes distribués continus ou discrets
- commande référencée capteur
Perception :
- position, force
- vision
Caractérisation et modélisation des interactions dans le micromonde
Événement - date
8JNRR, 4-6 novembre 2009 P. Lutz
• Introduction
• Les structures microrobotiques
• La préhension
• La perception
• Les stations de micromanipulation et de micro-assemblage
• Vers la nanorobotique
Microbotique pour composants micrométriques
Événement - date
9JNRR, 4-6 novembre 2009 P. Lutz
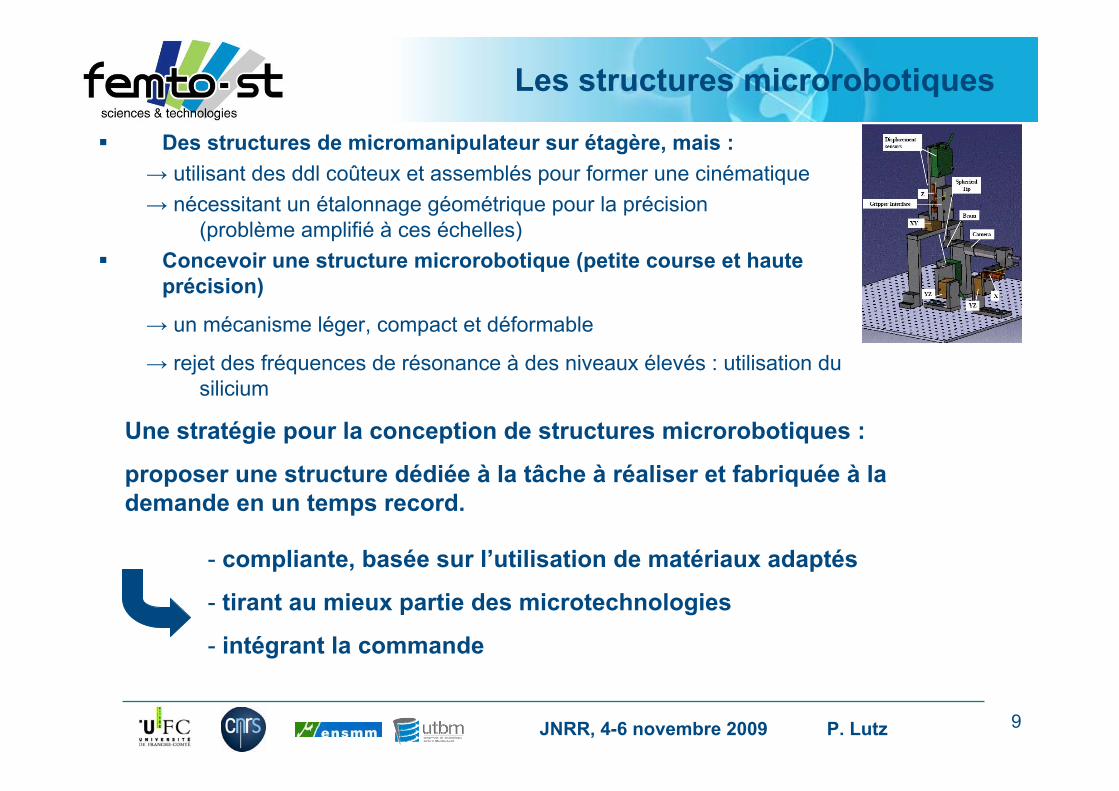
Les structures microrobotiques
Des structures de micromanipulateur sur étagère, mais :→ utilisant des ddl coûteux et assemblés pour former une cinématique→ nécessitant un étalonnage géométrique pour la précision
(problème amplifié à ces échelles) Concevoir une structure microrobotique (petite course et haute précision)
→ un mécanisme léger, compact et déformable
→ rejet des fréquences de résonance à des niveaux élevés : utilisation du silicium
- compliante, basée sur l’utilisation de matériaux adaptés
- tirant au mieux partie des microtechnologies
- intégrant la commande
Une stratégie pour la conception de structures microrobotiques :
proposer une structure dédiée à la tâche à réaliser et fabriquée à la demande en un temps record.
Événement - date
10JNRR, 4-6 novembre 2009 P. Lutz
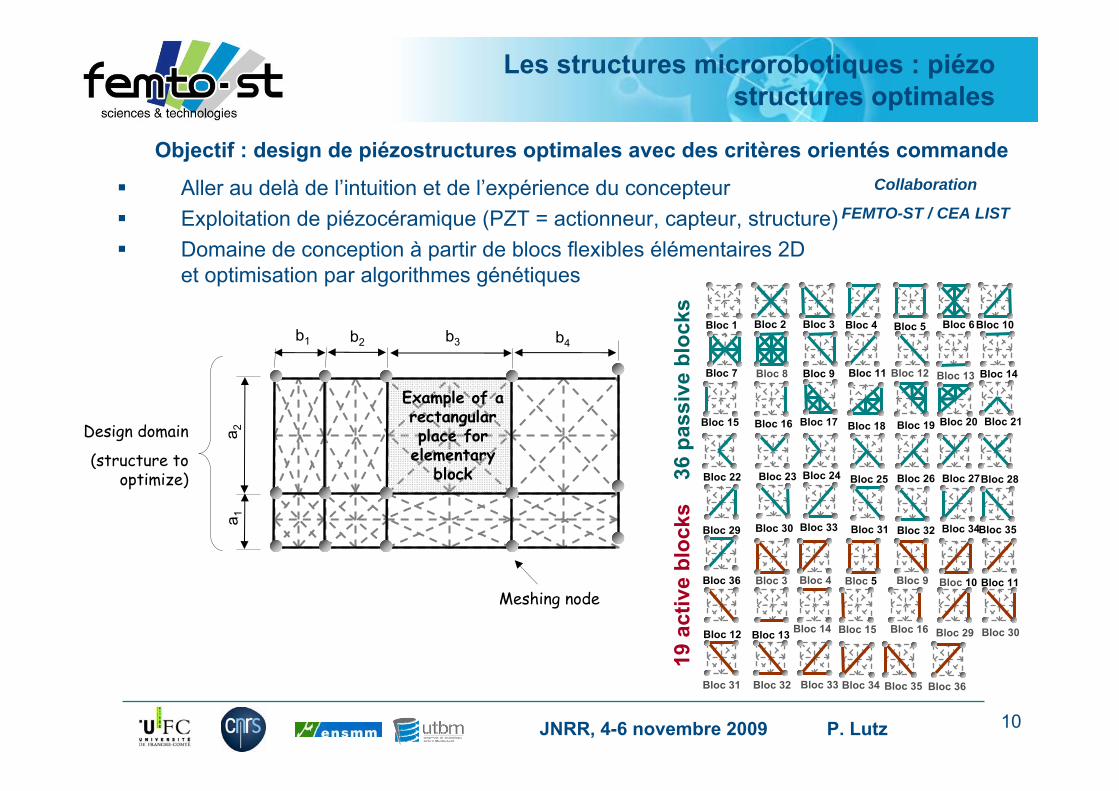
Les structures microrobotiques : piézostructures optimales
Aller au delà de l’intuition et de l’expérience du concepteurExploitation de piézocéramique (PZT = actionneur, capteur, structure) Domaine de conception à partir de blocs flexibles élémentaires 2D et optimisation par algorithmes génétiques
b1 b2 b3 b4
a 1a 2
Meshing node
Example of a rectangular place for
elementary block
Design domain
(structure to optimize)
Bloc 2 Bloc 3Bloc 1 Bloc 4 Bloc 5 Bloc 6
Bloc 7 Bloc 8 Bloc 9
Bloc 10
Bloc 11 Bloc 12 Bloc 13
Bloc 15
Bloc 14
Bloc 16 Bloc 17 Bloc 19 Bloc 20Bloc 18 Bloc 21
Bloc 22 Bloc 23 Bloc 24 Bloc 26 Bloc 27Bloc 25 Bloc 28
Bloc 29 Bloc 30 Bloc 31 Bloc 32Bloc 33 Bloc 35Bloc 34
Bloc 36
Bloc 14
Bloc 3 Bloc 4 Bloc 5 Bloc 9 Bloc 11Bloc 10
Bloc 12 Bloc 13 Bloc 15 Bloc 16 Bloc 29
Bloc 31
Bloc 30
Bloc 32 Bloc 33 Bloc 34 Bloc 35 Bloc 3636
pas
sive
blo
cks
19 a
ctiv
e bl
ocks
Objectif : design de piézostructures optimales avec des critères orientés commandeCollaboration
FEMTO-ST / CEA LIST

Événement - date
11JNRR, 4-6 novembre 2009 P. Lutz
Critères usuels d’optimisation statiques : déplacement et force au point de sortie, amplification de mouvement et d’effort.
Critères insuffisants pour les structures microrobotiques !
Contribution théorique [Grossard et al., IEEE TMECH 2009] : deux critères orientés commande pour l’optimisation de la dynamique des structures, basés sur
les grammiens (prix de thèse GDR MACS 2009)
Critère J1k : augmentation de l’autorité de contrôle des k premiers modes
(augmente le roll-off, permet la réduction d’ordre).
Les structures microrobotiques : piézostructures optimales

Événement - date
12JNRR, 4-6 novembre 2009 P. Lutz
Critères usuels d’optimisation statiques : déplacement et force au point de sortie, amplification de mouvement, d’effort
Critères insuffisants pour les structures microrobotiques !
Contribution théorique [Grossard et al., IEEE TMECH 2009] : deux critères orientés commande pour l’optimisation de la dynamique des structures, basés sur les grammiens
(prix de thèse GDR MACS 2009)
Critère J2k : assure l’alternance des résonnances (pôles) et anti-résonnances (zéros) sur les k premiers
modes (garantie de stabilité, robustesse).
Re
Sens of poles displacement
Instability zone
Im
0
g: 0 →+∞
ω (rad/s)
Magnitude (dB)
alternating pole/zero
Root locus
Les structures microrobotiques : piézostructures optimales
Événement - date
13JNRR, 4-6 novembre 2009 P. Lutz
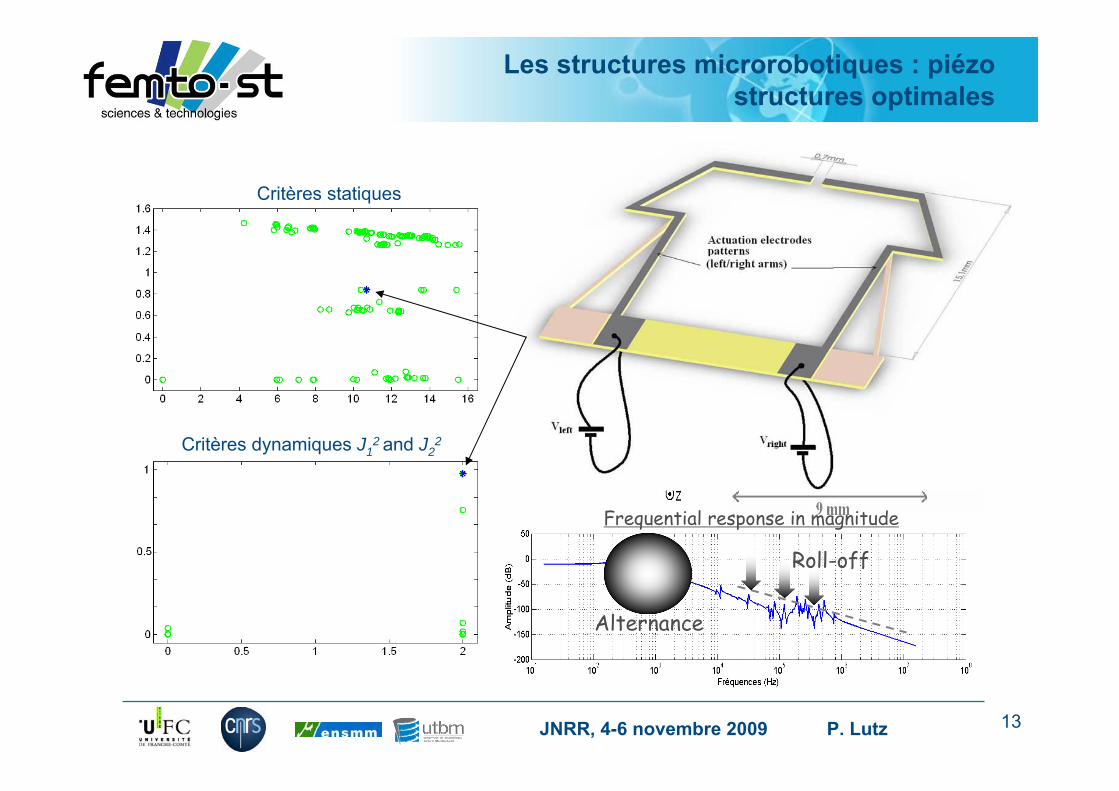
PZT PIC151
20mm
20mm
Roll-off
Alternance
Frequential response in magnitude
Critères statiques
Critères dynamiques J12 and J2
2
Les structures microrobotiques : piézostructures optimales
Événement - date
14JNRR, 4-6 novembre 2009 P. Lutz
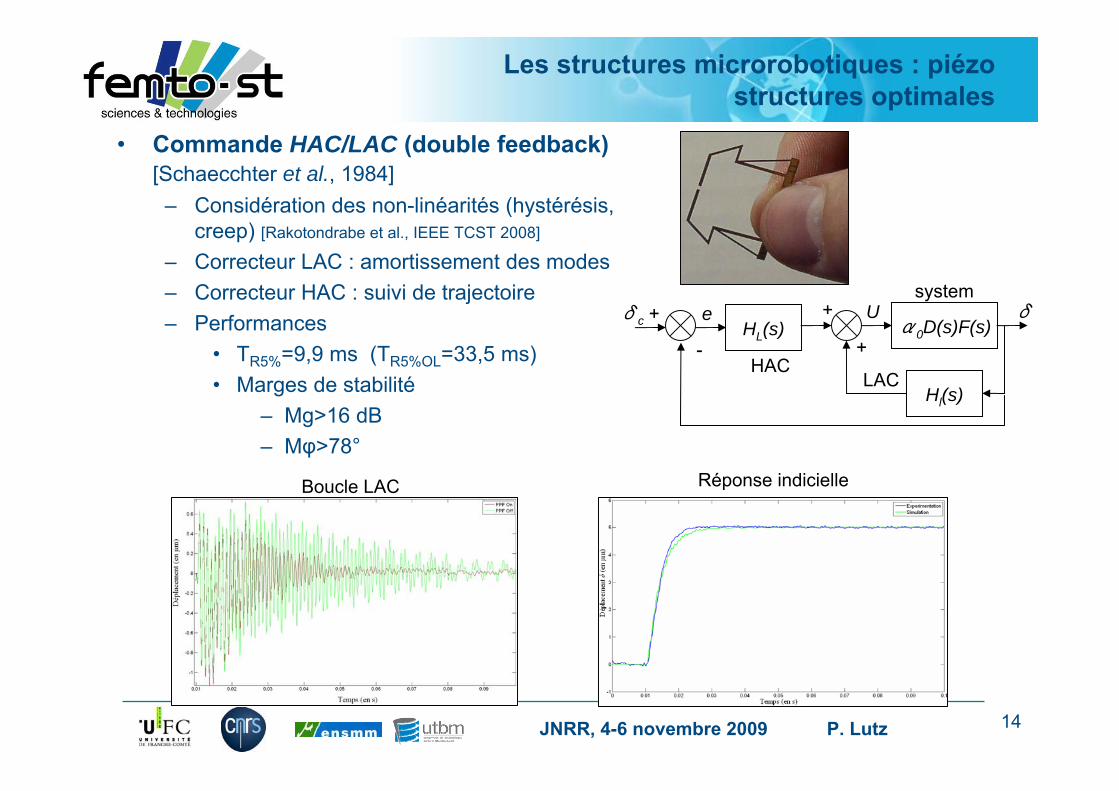
• Commande HAC/LAC (double feedback) [Schaecchter et al., 1984]
– Considération des non-linéarités (hystérésis, creep) [Rakotondrabe et al., IEEE TCST 2008]
– Correcteur LAC : amortissement des modes– Correcteur HAC : suivi de trajectoire– Performances
• TR5%=9,9 ms (TR5%OL=33,5 ms)• Marges de stabilité
– Mg>16 dB– Mφ>78°
Boucle LAC Réponse indicielle
HL(s) +
-
δc e
HAC
δUα0D(s)F(s)
system
Hl(s) LAC
+
+
Les structures microrobotiques : piézostructures optimales
Événement - date
15JNRR, 4-6 novembre 2009 P. Lutz
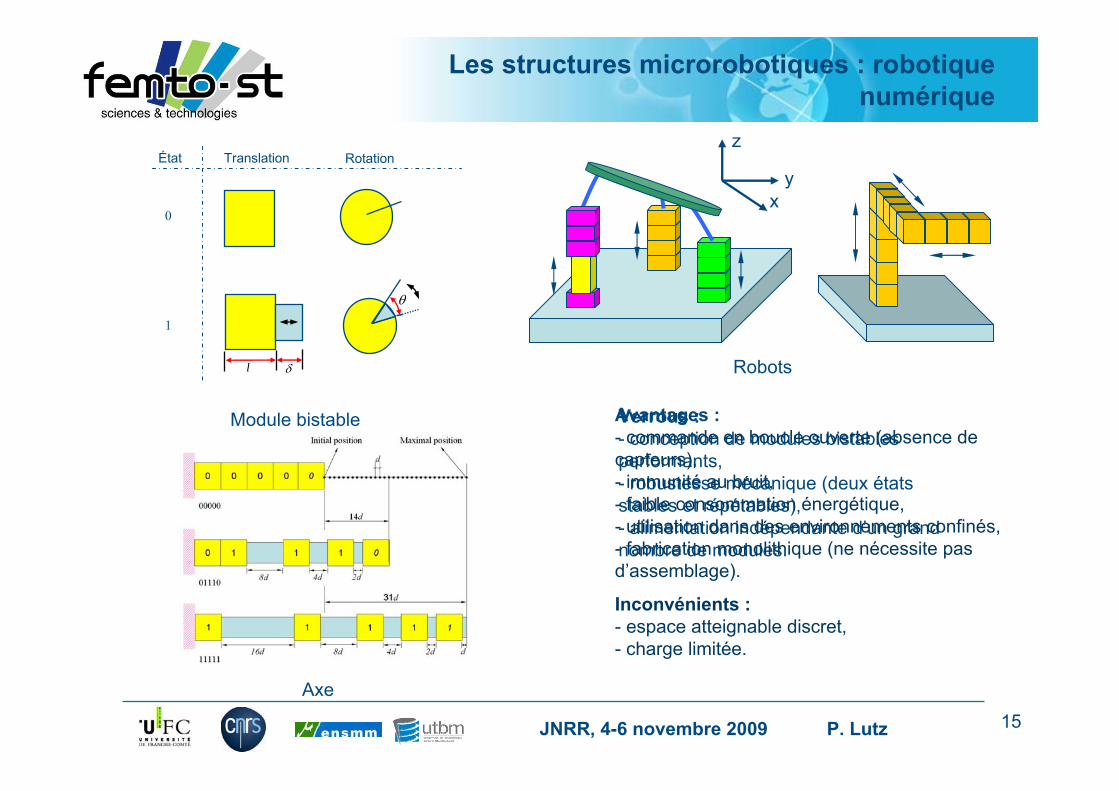
Translation
δ
Rotation
θ
État
0
1
l
Module bistable
Axe
Verrous :- conception de modules bistables performants,- robustesse mécanique (deux états stables et répétables),- alimentation indépendante d’un grand nombre de modules.
Avantages :- commande en boucle ouverte (absence de capteurs),- immunité au bruit,- faible consommation énergétique,- utilisation dans des environnements confinés,- fabrication monolithique (ne nécessite pas d’assemblage).
Inconvénients :- espace atteignable discret,- charge limitée.
y
Robots
x
z
Les structures microrobotiques : robotique numérique

Événement - date
16JNRR, 4-6 novembre 2009 P. Lutz
Les structures microrobotiques : robotique numérique
Module bistable monolithique (wafer SOI)
4mm
2.5mm
état 0
état 1
État après fabrication Butée activée
Événement - date
17JNRR, 4-6 novembre 2009 P. Lutz
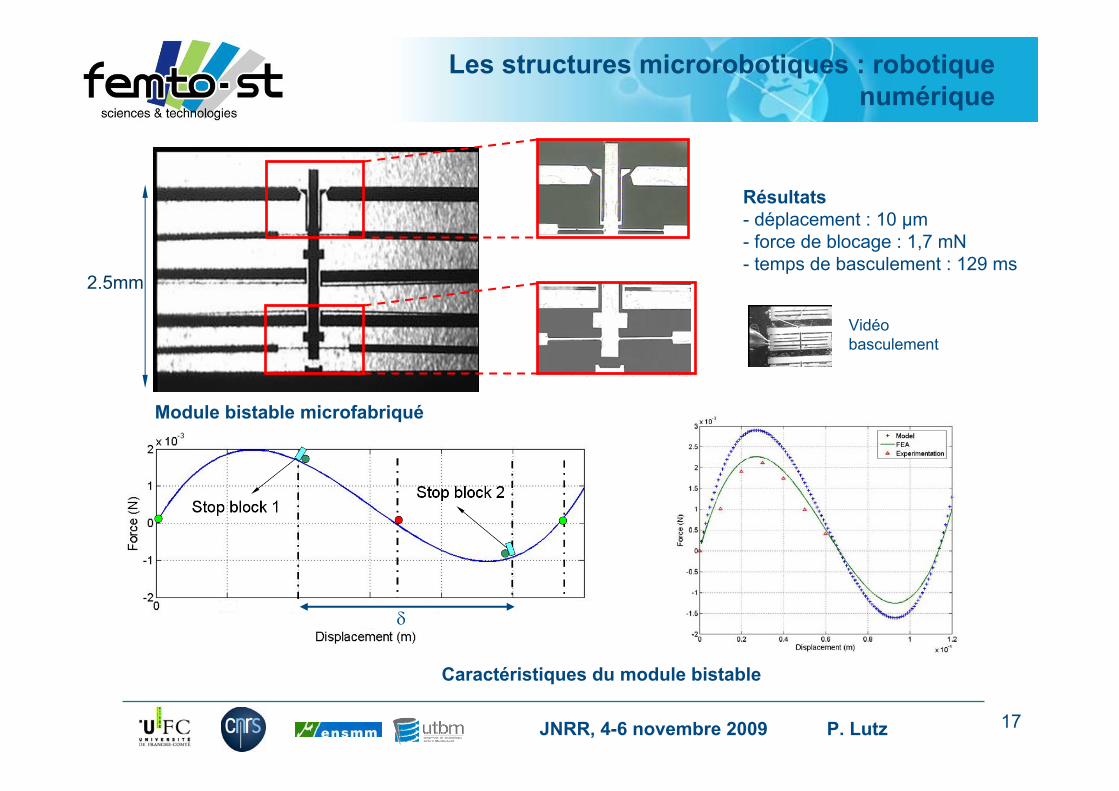
Module bistable microfabriqué
Résultats- déplacement : 10 µm- force de blocage : 1,7 mN- temps de basculement : 129 ms
2.5mm
Caractéristiques du module bistable
δ
Vidéo basculement
Les structures microrobotiques : robotique numérique
Événement - date
18JNRR, 4-6 novembre 2009 P. Lutz
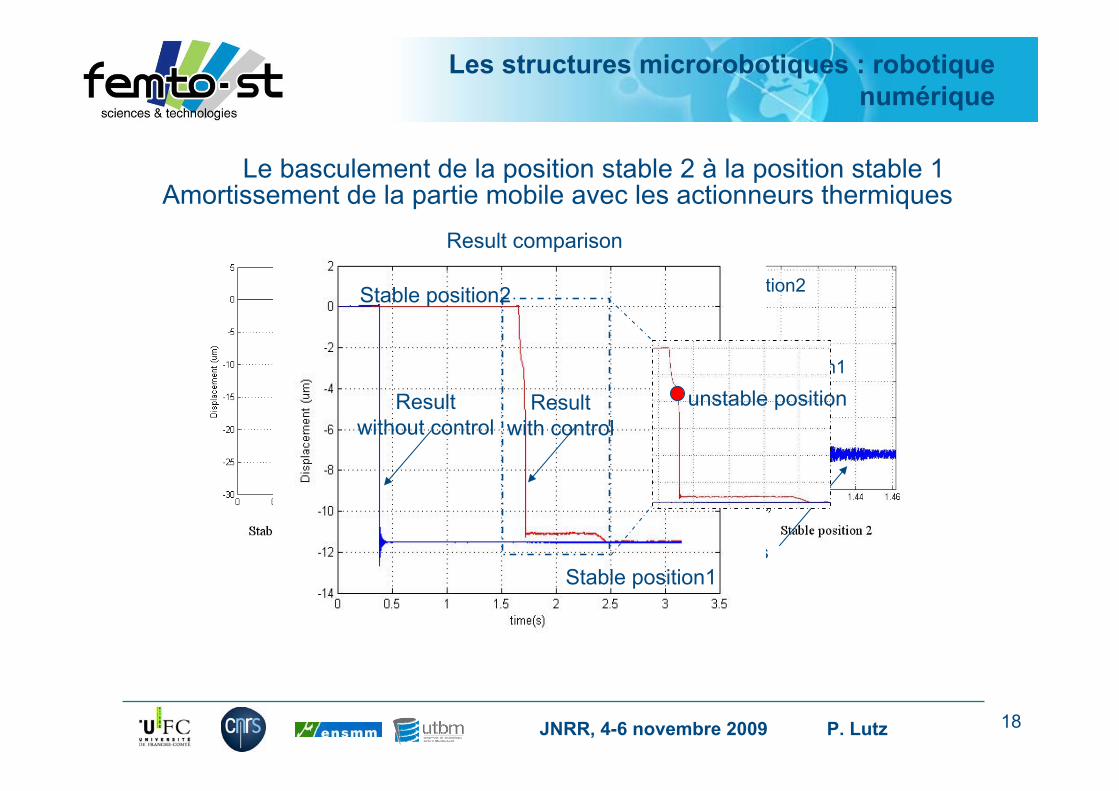
Amortissement de la partie mobile avec les actionneurs thermiquesLe basculement de la position stable 2 à la position stable 1
vibrations
Stable position2
Stable position1
Unstable position1
Stable position1
Stable position2
unstable position
Result comparison
Result without control
Result with control
Les structures microrobotiques : robotique numérique
Événement - date
19JNRR, 4-6 novembre 2009 P. Lutz
• Introduction
• Les structures microrobotiques
• La préhension
• La perception
• Les stations de micromanipulation et de micro-assemblage
• Vers la nanorobotique
Microbotique pour composants micrométriques

Événement - date
20JNRR, 4-6 novembre 2009 P. Lutz
La préhension
Préhension par doigts (de 2005 à 2009)
Taille des objets manipulés
Intégration des moyens de perception
Intégration des moyens de commande
Fiabilité du lâcher
Milieux de préhension
… de 100 μm à 10 μm
… position et force, capteurs embarqués, capteurs microfabriqués, commande des matériaux actifs
… lois de commande « embarquables »
… lâcher répétable, fonctionalisation
… air, vide, liquide
- modélisation des interactions
- maîtrise des interactions
- commande
- stratégie de prise/lâcher adaptée au milieu
Événement - date
21JNRR, 4-6 novembre 2009 P. Lutz
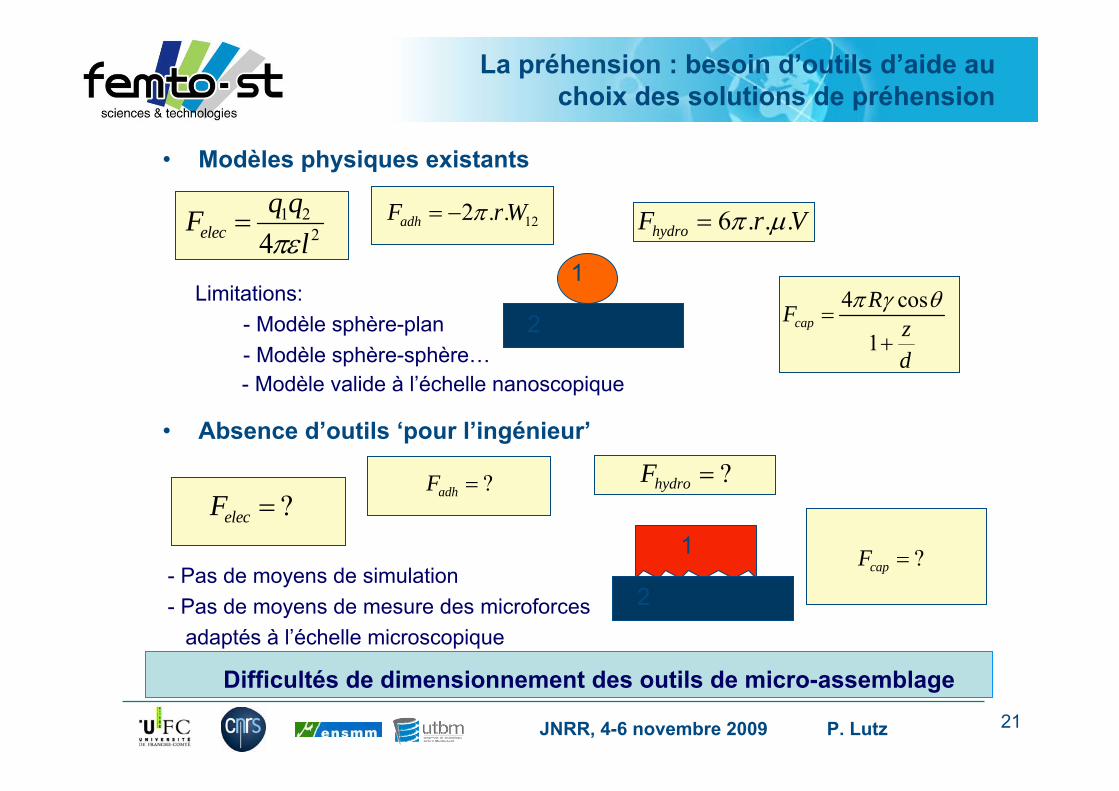
La préhension : besoin d’outils d’aide au choix des solutions de préhension
• Modèles physiques existants
122 . .adhF r Wπ= −1 224elec
q qFlπε
=
4 cos
1cap
RF zd
π γ θ=
+
6 . . .hydroF r Vπ μ=
• Absence d’outils ‘pour l’ingénieur’
1
2Limitations:
- Modèle sphère-plan- Modèle sphère-sphère…- Modèle valide à l’échelle nanoscopique
?adhF =?elecF =
?capF =
?hydroF =
1
2- Pas de moyens de simulation- Pas de moyens de mesure des microforces
adaptés à l’échelle microscopique
Difficultés de dimensionnement des outils de micro-assemblage
Événement - date
22JNRR, 4-6 novembre 2009 P. Lutz
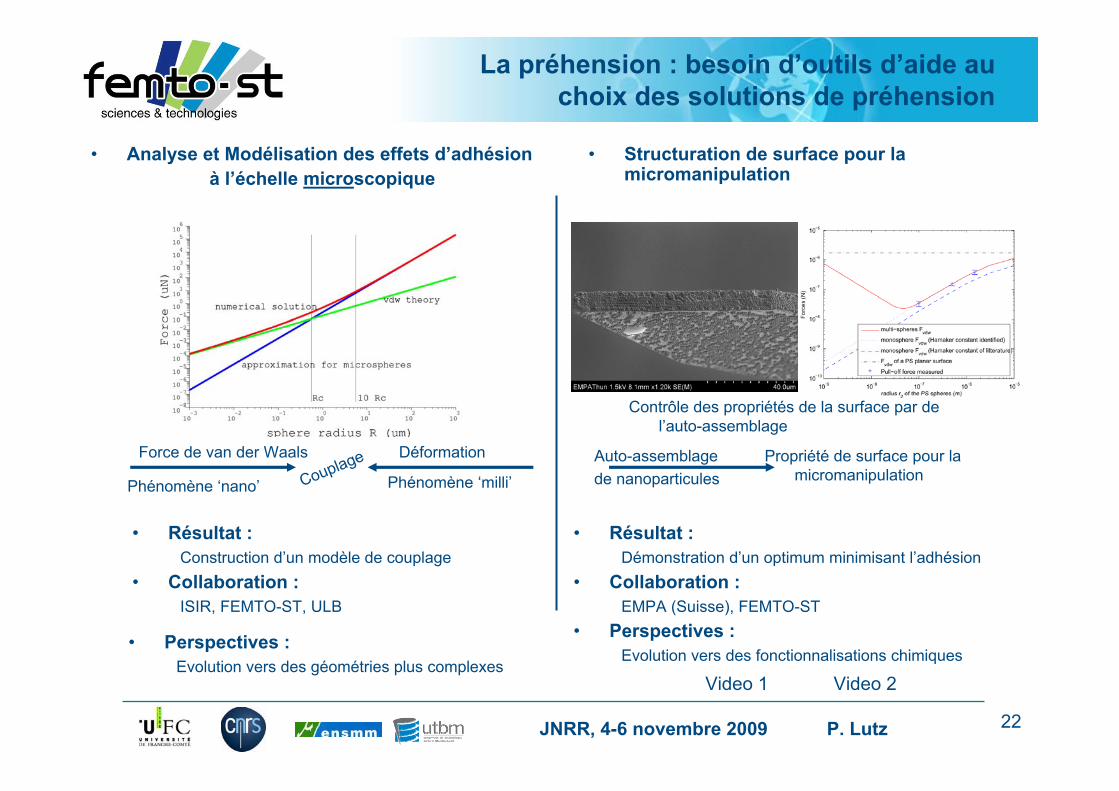
• Analyse et Modélisation des effets d’adhésionà l’échelle microscopique
Force de van der Waals Déformation
Phénomène ‘nano’ Phénomène ‘milli’Couplage
• Résultat :Construction d’un modèle de couplage
• Perspectives :Evolution vers des géométries plus complexes
• Structuration de surface pour la micromanipulation
• Collaboration :ISIR, FEMTO-ST, ULB
Contrôle des propriétés de la surface par de l’auto-assemblage
• Résultat :Démonstration d’un optimum minimisant l’adhésion
• Perspectives :Evolution vers des fonctionnalisations chimiques
• Collaboration :EMPA (Suisse), FEMTO-ST
Auto-assemblage de nanoparticules
Propriété de surface pour la micromanipulation
Video 2Video 1
La préhension : besoin d’outils d’aide au choix des solutions de préhension

Événement - date
23JNRR, 4-6 novembre 2009 P. Lutz
La préhension : micropinces instrumentées
Micropince de Femto-tools (FT G100)
Nanotweezer du LIMMS
1 mm
Problématiques- Contrôle de la force de serrage
- Rapport signal/bruit défavorable
- Sensibilité à l’environnement
- But : filtrer le bruit sans pénaliser la bande passante
du système, nécessaire à une préhension ferme sans
détruire ni endommager les micro-objets manipulés.
Micropince de Femto-tools (FT G100)Écartement initial 100 µm
Actionnement électrostatique
Capteur de force intégré
Tension de commande max. : 200 V

Événement - date
24JNRR, 4-6 novembre 2009 P. Lutz
Contrôle de MEMS : caractérisation des bruits
Caractéristiques du bruit de mesure
⎩⎨⎧
+=++=+
)()(.)()()(.)(.)1(
kvkXCkVkwkVBkXAkX
out
in
Modèle d’état stochastique
bruit d’état
bruit de mesure
Modèle de la micropince
Comportement en boucle ouverte
La préhension : micropinces instrumentées

Événement - date
25JNRR, 4-6 novembre 2009 P. Lutz
Contrôle de MEMS : commande en force
Filtrage du bruit sans perte de dynamiquePréhension d’une bille de 80 µm
À l’aide d’une micropince Femto-Tools
Commande LQG
Consigne : 10 µN
Comparaison entre la sortie estimée et le résultat de la mesure à l’aide d’un interféromètre.
La préhension : micropinces instrumentées
Événement - date
26JNRR, 4-6 novembre 2009 P. Lutz
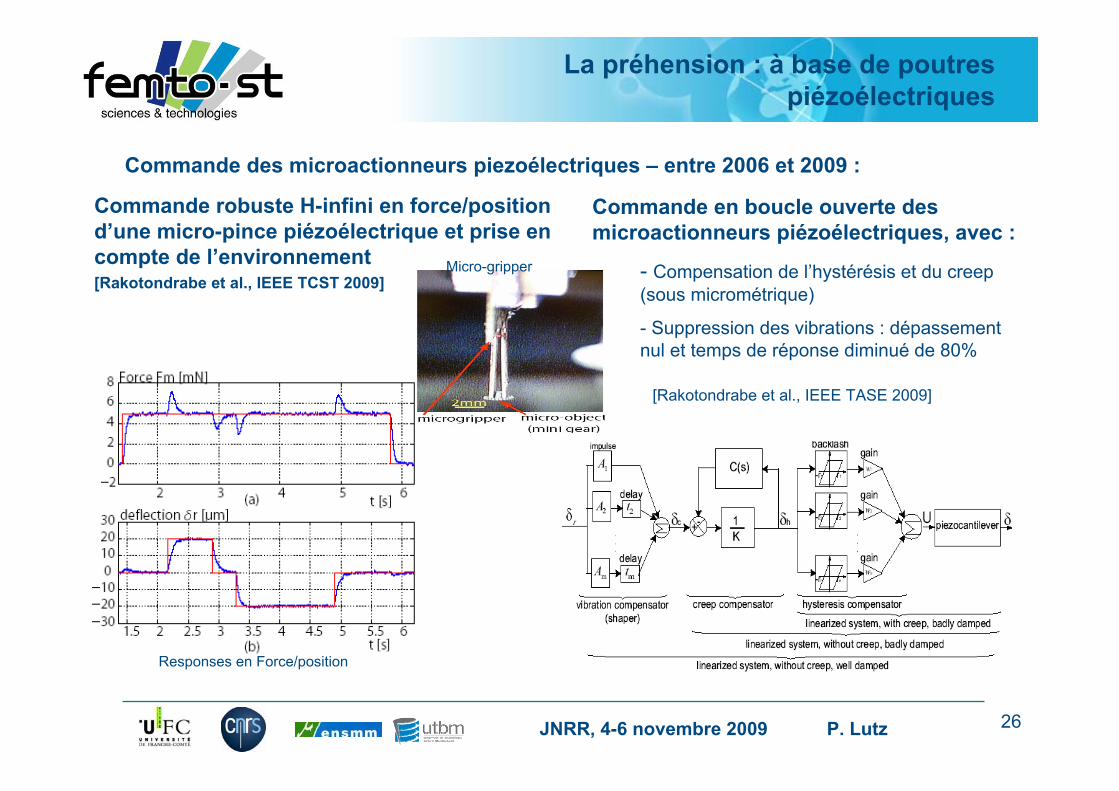
La préhension : à base de poutres piézoélectriques
Commande robuste H-infini en force/position d’une micro-pince piézoélectrique et prise en compte de l’environnement[Rakotondrabe et al., IEEE TCST 2009]
Commande des microactionneurs piezoélectriques – entre 2006 et 2009 :
Responses en Force/position
Micro-gripper
Commande en boucle ouverte des microactionneurs piézoélectriques, avec :
- Compensation de l’hystérésis et du creep(sous micrométrique)
- Suppression des vibrations : dépassement nul et temps de réponse diminué de 80%
[Rakotondrabe et al., IEEE TASE 2009]
Événement - date
27JNRR, 4-6 novembre 2009 P. Lutz
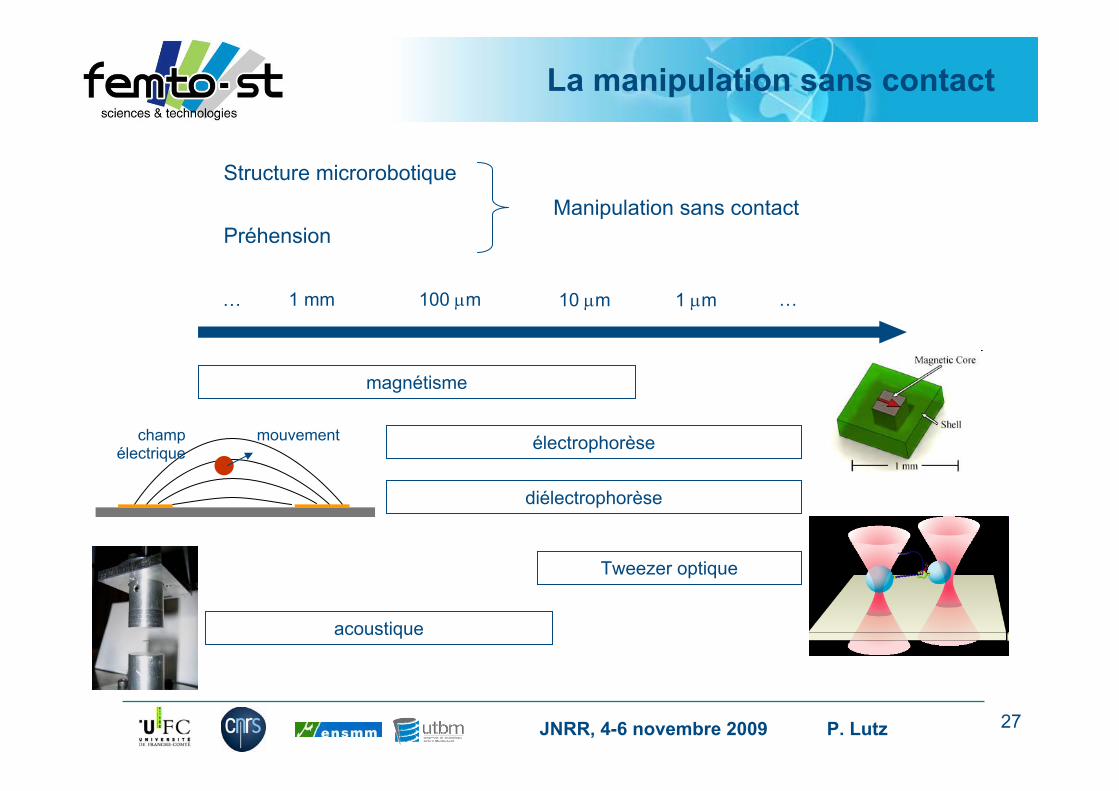
La manipulation sans contact
Structure microrobotique
PréhensionManipulation sans contact
100 μm 10 μm 1 μm1 mm
magnétisme
électrophorèse
Tweezer optique
diélectrophorèse
……
acoustique
champélectrique
mouvement
Événement - date
28JNRR, 4-6 novembre 2009 P. Lutz
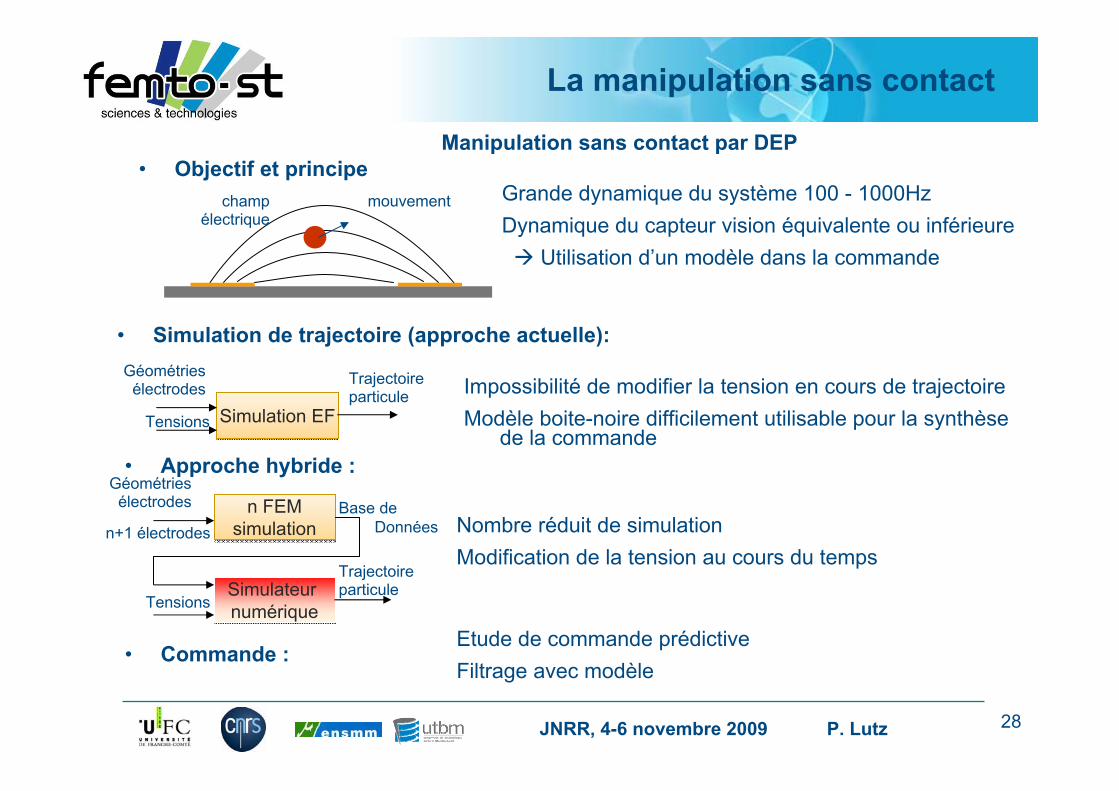
La manipulation sans contact
• Simulation de trajectoire (approche actuelle):
Simulation EFSimulation EF
Géométriesélectrodes
Tensions
Trajectoireparticule
n FEMsimulation
n FEMsimulation
Géométriesélectrodes
Tensions
Trajectoireparticule
Base de Donnéesn+1 électrodes
SimulateurnumériqueSimulateurnumérique
• Approche hybride :
Impossibilité de modifier la tension en cours de trajectoireModèle boite-noire difficilement utilisable pour la synthèse
de la commande
Nombre réduit de simulationModification de la tension au cours du temps
• Objectif et principechamp
électriquemouvement
• Commande :Etude de commande prédictiveFiltrage avec modèle
Grande dynamique du système 100 - 1000HzDynamique du capteur vision équivalente ou inférieure
Utilisation d’un modèle dans la commande
Manipulation sans contact par DEP

Événement - date
29JNRR, 4-6 novembre 2009 P. Lutz
sim x positionsim y positionexp x positionexp y position
Time (s)
Pos
ition
(m)
Vidéo diélectrophorèse
High dynamics40 ms
Manipulation sans contact par DEP
La manipulation sans contact
Trajectoire simulée et expérimentale pour une micro bille sous des tensions =[0,25,100,0] volts
Événement - date
30JNRR, 4-6 novembre 2009 P. Lutz
• Introduction
• Les structures microrobotiques
• La préhension
• La perception
• Les stations de micromanipulation et de micro-assemblage
• Vers la nanorobotique
Microbotique pour composants micrométriques
Événement - date
31JNRR, 4-6 novembre 2009 P. Lutz
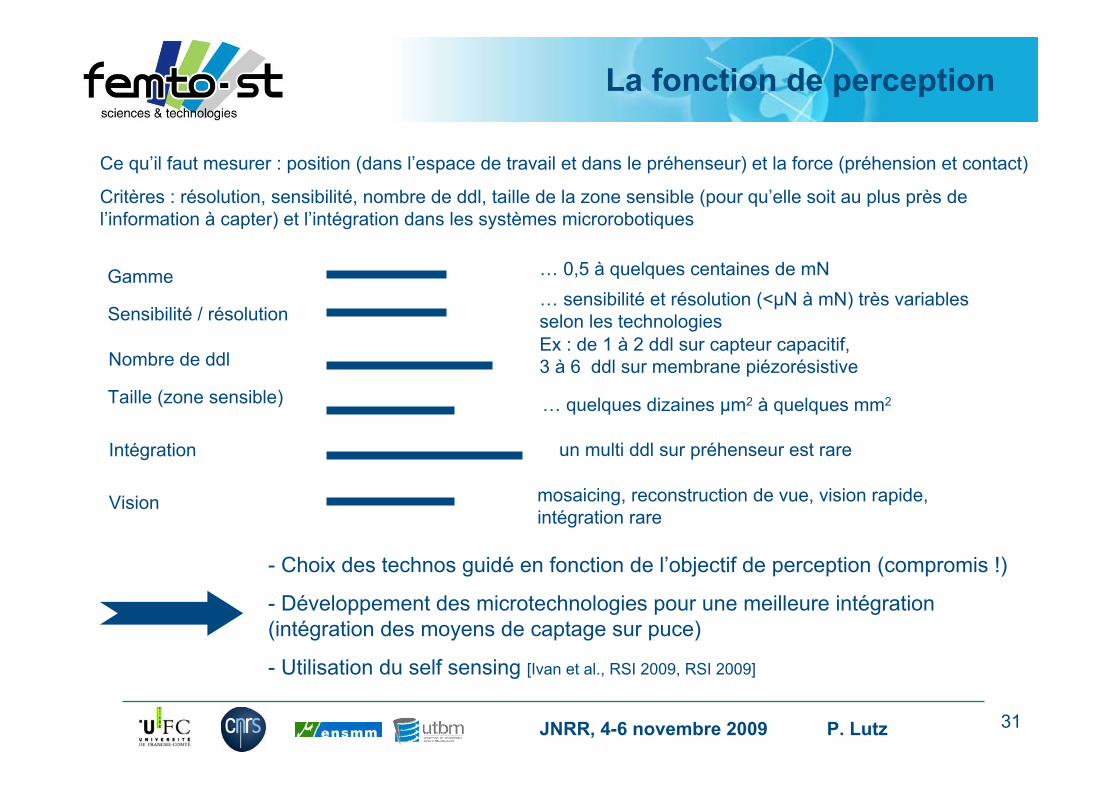
La fonction de perception
… 0,5 à quelques centaines de mN… sensibilité et résolution (<µN à mN) très variables selon les technologiesEx : de 1 à 2 ddl sur capteur capacitif,3 à 6 ddl sur membrane piézorésistive
… quelques dizaines µm2 à quelques mm2
Gamme
Sensibilité / résolution
Nombre de ddl
Intégration
Taille (zone sensible)
Ce qu’il faut mesurer : position (dans l’espace de travail et dans le préhenseur) et la force (préhension et contact)
Critères : résolution, sensibilité, nombre de ddl, taille de la zone sensible (pour qu’elle soit au plus près de l’information à capter) et l’intégration dans les systèmes microrobotiques
Vision
un multi ddl sur préhenseur est rare
- Choix des technos guidé en fonction de l’objectif de perception (compromis !)
- Développement des microtechnologies pour une meilleure intégration (intégration des moyens de captage sur puce)
- Utilisation du self sensing [Ivan et al., RSI 2009, RSI 2009]
mosaicing, reconstruction de vue, vision rapide, intégration rare
Événement - date
32JNRR, 4-6 novembre 2009 P. Lutz
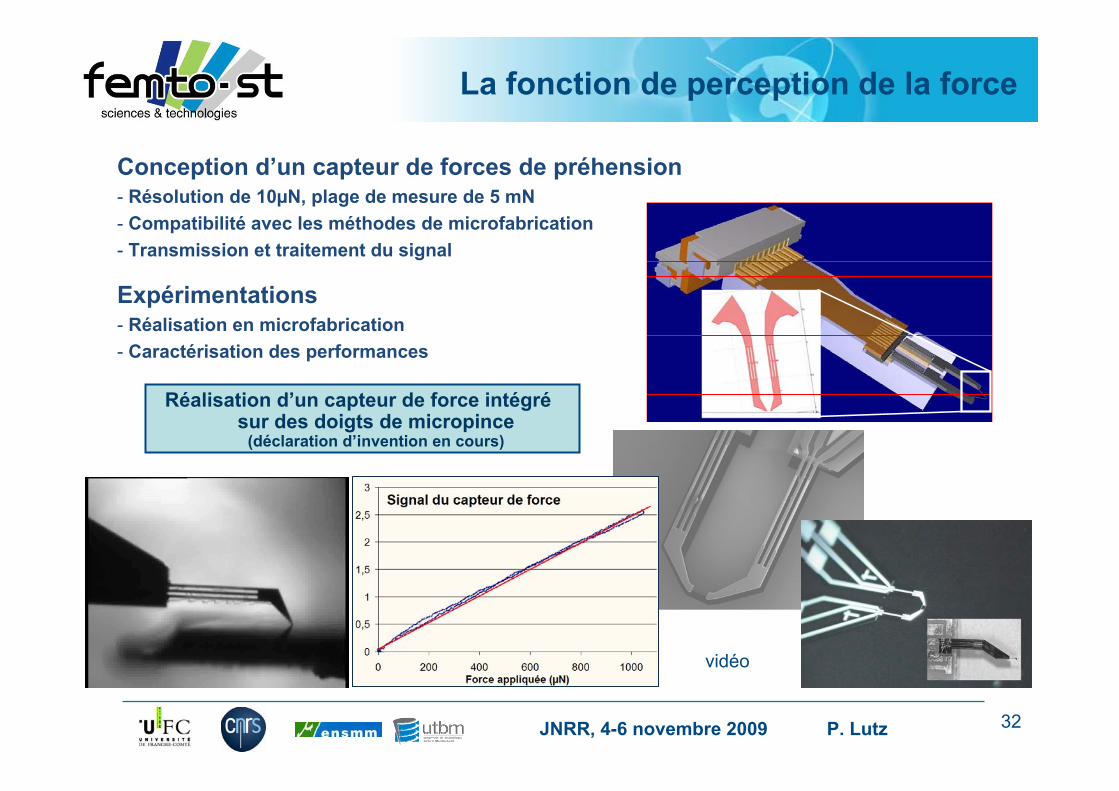
La fonction de perception de la force
Conception d’un capteur de forces de préhension- Résolution de 10µN, plage de mesure de 5 mN- Compatibilité avec les méthodes de microfabrication- Transmission et traitement du signal
Expérimentations- Réalisation en microfabrication- Caractérisation des performances
Réalisation d’un capteur de force intégrésur des doigts de micropince
(déclaration d’invention en cours)
vidéo

Événement - date
33JNRR, 4-6 novembre 2009 P. Lutz
• Introduction
• Les structures microrobotiques
• La préhension
• La perception
• Les stations de micromanipulation et de micro-assemblage
• Vers la nanorobotique
Microbotique pour composants micrométriques

Événement - date
34JNRR, 4-6 novembre 2009 P. Lutz
Stations de micromanipulation et de micro-assemblage : contexte
[Dan Popa 2007]USA
Station Micro-Meso-Micro M3, 19 ddl, préhenseur passif,composants mm/500 µm
En Amérique : Carnegie Mellon Univ., Univ. Texas à Arlington, Toronto, Victoria
En Asie : Nagoya, Tsukuba, Tokyo, Toyo
5 ddl, manipulation de composants optiques
[Matsumoto 2007]Japon

Événement - date
35JNRR, 4-6 novembre 2009 P. Lutz
En Europe :
- France : FEMTO-ST, ISIR, CEA- Suisse : EPFL, ETHZ, EMPA- Allemagne : IPA Stuttgart, Univ d’Oldenburg- Belgique : ULB- Italie : Univ de Pise, ITIA- Royaume Uni : Univ de Nottingham- Finlande : TUT, HUT- Suède : KTH- Espagne : Robotiker
SCARA dans une pocket factory, composants 500 µm
[Verettas 2006]Suisse
Stations de micromanipulation et de micro-assemblage : contexte

Événement - date
36JNRR, 4-6 novembre 2009 P. Lutz
Le projet de société PERCIPIO ROBOTICS
- chef de projet : David Hériban
- actuellement en incubation (incubateur de Franche-Comté)
- création prévue vers l’été 2010
Micron d’or 2008
-manipuler,
- positionner,
- et assembler automatiquement des objets de 0,01 mm à 10 mm en précision micrométrique
Etude, conception, prototypage de systèmes flexibles et modulaires sur mesure pour :
Stations de micromanipulation et de micro-assemblage
Vidéo Pick and place automatique
Lauréat concours OSEO émergence 2009
Événement - date
37JNRR, 4-6 novembre 2009 P. Lutz
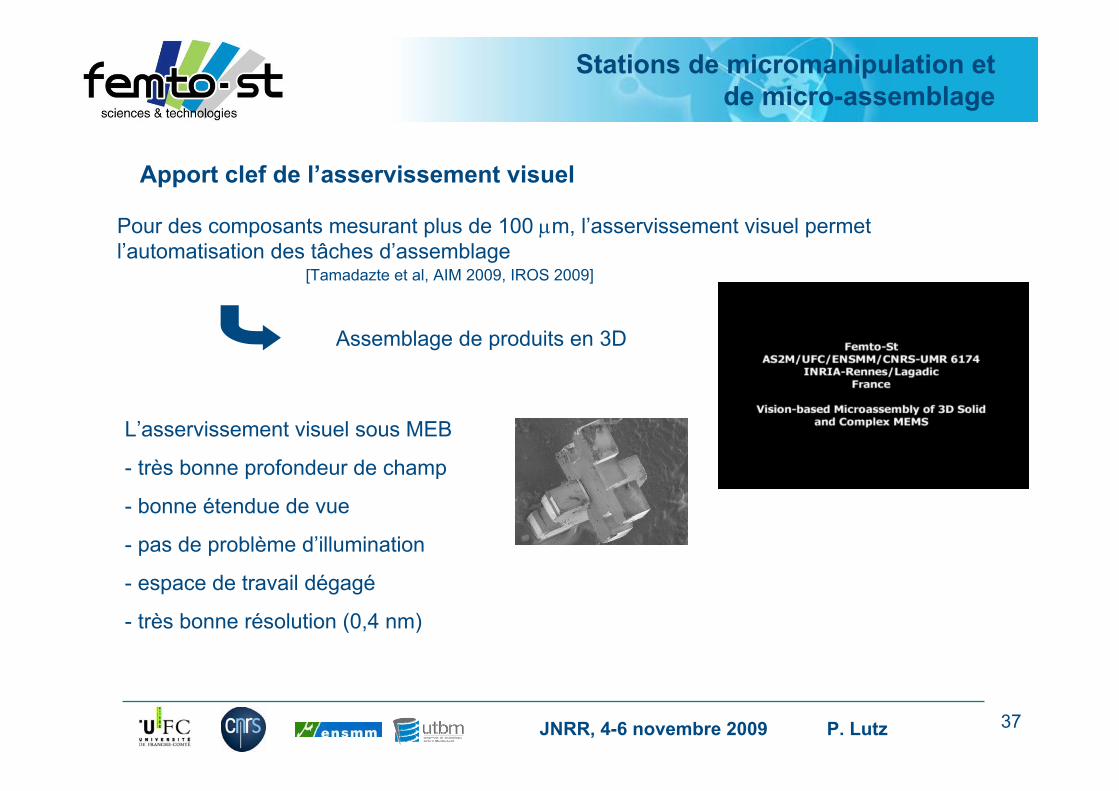
Apport clef de l’asservissement visuel
Pour des composants mesurant plus de 100 μm, l’asservissement visuel permet l’automatisation des tâches d’assemblage
Assemblage de produits en 3D
L’asservissement visuel sous MEB
- très bonne profondeur de champ
- bonne étendue de vue
- pas de problème d’illumination
- espace de travail dégagé
- très bonne résolution (0,4 nm)
[Tamadazte et al, AIM 2009, IROS 2009]
Stations de micromanipulation et de micro-assemblage
Événement - date
38JNRR, 4-6 novembre 2009 P. Lutz
• Introduction
• Les structures microrobotiques
• La préhension
• La perception
• Les stations de micromanipulation et de micro-assemblage
• Vers la nanorobotique
Microbotique pour composants micrométriques
Événement - date
39JNRR, 4-6 novembre 2009 P. Lutz
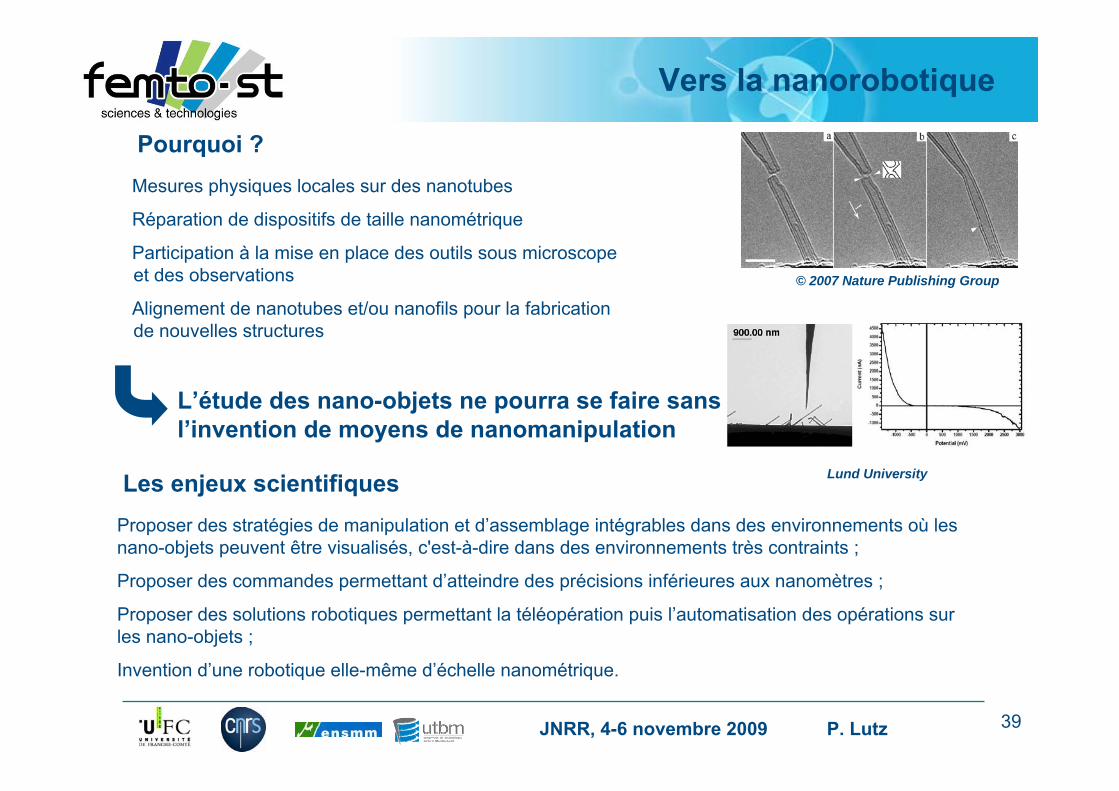
Vers la nanorobotique
Pourquoi ?
Les enjeux scientifiques
L’étude des nano-objets ne pourra se faire sans l’invention de moyens de nanomanipulation
Proposer des stratégies de manipulation et d’assemblage intégrables dans des environnements où les nano-objets peuvent être visualisés, c'est-à-dire dans des environnements très contraints ;
Proposer des commandes permettant d’atteindre des précisions inférieures aux nanomètres ;
Proposer des solutions robotiques permettant la téléopération puis l’automatisation des opérations sur les nano-objets ;
Invention d’une robotique elle-même d’échelle nanométrique.
© 2007 Nature Publishing Group
Lund University
Mesures physiques locales sur des nanotubes
Réparation de dispositifs de taille nanométrique
Participation à la mise en place des outils sous microscope et des observations
Alignement de nanotubes et/ou nanofils pour la fabrication de nouvelles structures
Événement - date
40JNRR, 4-6 novembre 2009 P. Lutz
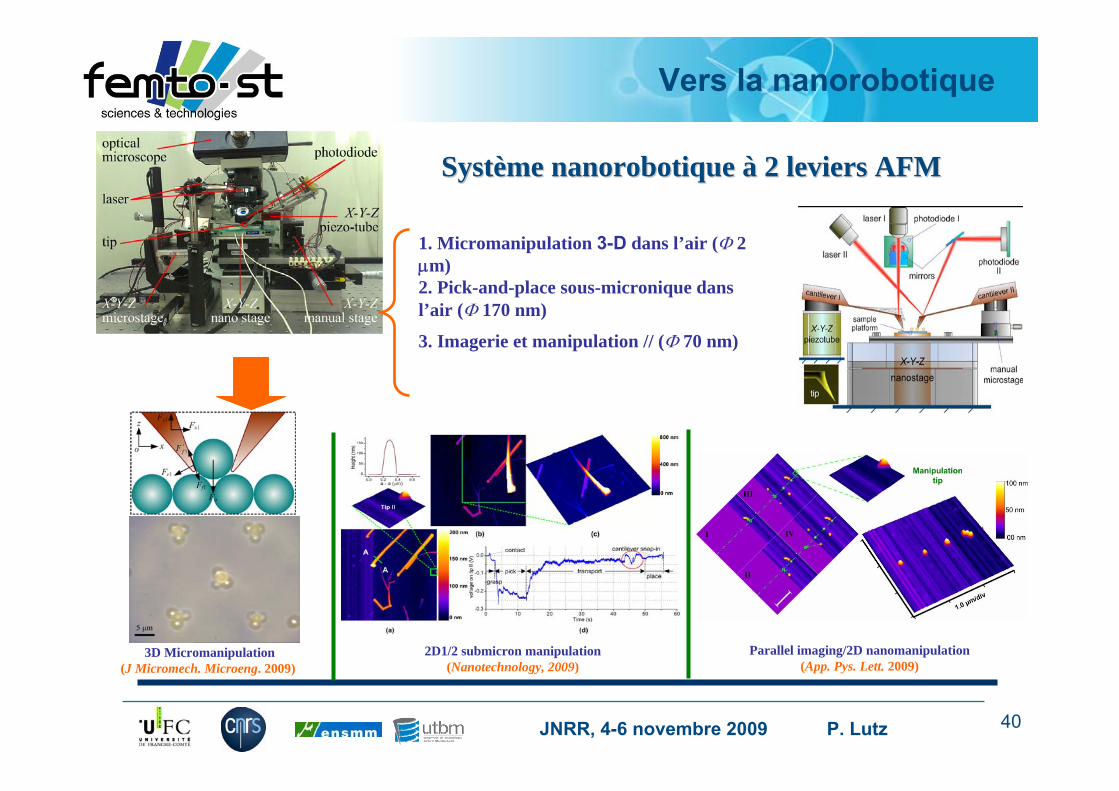
Vers la nanorobotique
Parallel imaging/2D nanomanipulation(App. Pys. Lett. 2009)
3D Micromanipulation (J Micromech. Microeng. 2009)
2D1/2 submicron manipulation (Nanotechnology, 2009)
1. Micromanipulation 3-D dans l’air (Φ 2 μm)2. Pick-and-place sous-micronique dansl’air (Φ 170 nm)
3. Imagerie et manipulation // (Φ 70 nm)
SystSystèème me nanorobotiquenanorobotique àà 2 leviers AFM 2 leviers AFM

Événement - date
41JNRR, 4-6 novembre 2009 P. Lutz
Depuis les JNRR 2007
Présence dans les conférences internationales
3
4
5
6
2008 2009
IROS ICRA
Quelques distinctions→ ICRA 2008 : Best Automation Paper (J)
→ ICRA 2009 : Best Automation Paper (CH), Best Student Paper (CH), Best Medical Robotics Paper (Ca), Intuitive Surgical Best Medical Robotics Paper(Ca)
→ IROS 2009 : Best Paper (USA), Best Application Paper (F)
→ 2009 RAS Most Active Technical Committee
Sessions techniques
workshops

Événement - date
42JNRR, 4-6 novembre 2009 P. Lutz
Vers le champ applicatif médical
Microrobotique médicaleCatéthers actifs
Capsules
Mécanismes complexes
précision
commandeà
distance
conception micro-
mécatronique
commande référencée capteurs
sécurité
autonomie
diagnostic précoce
micro thérapie
assistance au geste médical





























