Embed Size (px)
Citation preview

Stage de Licence 2013-2014 :
"Écoulements faiblement compressibles"
Louis Huguet - Angelo Rosellosous la direction de Jean-Michel Ghidaglia, Cyrille Hériveaux
MÉMOIRE DE RECHERCHE

Remerciements
Nos remerciements vont tout d’abord à Jean-Michel Ghidaglia, d’une part pour le choix dece sujet des plus intéressants, d’autre part pour son accompagnement, son aide précieuse ainsique pour ses nombreuses remarques inspirantes, non seulement sur notre problème mais sur laphilosophie des mathématiques en général. Pour n’en citer que deux : "La 1D, ça enivre" etbien-sûr : "Les mathématiques sont juste une manière intelligente d’écrire 0".
Merci à Cyrille pour son soutien, l’attention portée à notre binôme, et ses propos encoura-geants et rassurants quant à l’avancée de notre travail.
Merci à toute l’équipe du LRC pour leur accueil chaleureux et leur convivialité. Les occasionsde démontrer nos compétences culinaires ont été plus rares que prévues, mais les souvenirs n’enseront que plus marquants.
Ce stage a été notre première véritable expérience de recherche. Il nous a sans aucun doutepermis d’appréhender un peu mieux ce qui fait la vie d’un chercheur au quotidien : confrontationà de véritables problèmes, alternance de progrès et de régression, d’accomplissements et de dé-couvertes, répartition du travail, relation avec l’équipe et les encadrants... Il a de plus constituéune occasion de perfectionner notre usage des outils classiques que sont MATLAB et LATEX, etde nous former à la rédaction d’un mémoire de recherche, exercice périlleux mais très instructif.Évidemment, nous avons aussi eu l’opportunité de découvrir de nouveaux concepts, de nouveauxhorizons mathématiques.
Mentionnons finalement que nous avons eu la chance d’assiter à une série de cours sur la Mé-thode des volumes finis appliquée aux opérateurs de convection en mécanique des fluides animéspar M. Ghidaglia. Bien que notre niveau ne nous ait permis qu’une compréhension partielle desconcepts abordés, ces cours nous ont fait découvrir les mathématiques appliquées au numériquesous un tout nouveau jour. Contrairement à l’image que l’on en a bien souvent au sortir desclasses préparatoires, il s’agit d’une branche des mathématiques à part entière qui comprend, àce titre, ses méthodes, ses théorèmes, et une multitude de problèmes ouverts intéressants.
Merci à tous encore une fois,
Louis & Angelo
1

Table des matières
Remerciements 1
Table des matières 2
Résumé 3
1 Exposé de la problématique 4
1.1 Cadre de l’étude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.1 Formalisme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.2 Équations d’Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1.3 Fluides incompressibles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Analyse bibliographique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2.1 Travail d’A. Majda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.2 Article de G. Alì . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Travaux personnels 12
2.1 Développements multi-échelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.1.1 Problème à plusieurs échelles de temps . . . . . . . . . . . . . . . . . . . . 122.1.2 Analyse à une échelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.1.3 Analyse multi-échelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Généralisation des résultats de A. Majda . . . . . . . . . . . . . . . . . . . . . . . 152.2.1 Système généralisé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.2.2 Adimensionnement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2.3 Argument formel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2.4 Stabilité uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2.5 Vers la convergence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3 Résolution numérique des équations d’Euler . . . . . . . . . . . . . . . . . . . . . 182.3.1 Schéma VFFC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.3.2 Code réalisé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Bibliographie 22
Annexes 23
A Code MATLAB 23
B Développement multi-échelle 25
2

Résumé
Bien que, rigoureusement parlant, tous les fluides soient compressibles, dans les conditionsusuelles, la plupart d’entre eux s’écoulent selon des mouvements pour lesquels il est raisonnablede négliger la compressibilité, c’est-à-dire la variation du volume d’une quantité de matièredonnée. On parle alors d’écoulements incompressibles.
L’objet de ce stage est de comprendre et de préciser le passage d’un régime compressibleà un régime incompressible. Au travers de développements asymptotiques, on tâchera d’établirque les solutions aux équations d’Euler incompressibles peuvent-être vues comme limites dessolutions aux équations d’Euler compressibles en un certain sens.
3

Chapitre 1
Exposé de la problématique
1.1 Cadre de l’étude
1.1.1 Formalisme
Tout au long de cette étude, on considère un fluide en écoulement monophasique (typique-ment un liquide) dans un domaine ouvert, borné ou non de R3. On se place dans le cadre desécoulements parfaits, c’est-à-dire que l’on néglige les frottements visqueux ainsi que les échangesde chaleur.
Conformément au formalisme Eulérien, on désignera respectivement par fl, p, u la massevolumique, la pression et la vitesse au sein du fluide.
fl, p sont des fonctions scalaires du temps t œ R+ et de l’espace x = (x1, x2, x3) œ R3,u = (u1, u2, u3) est à valeur dans R3.
On adoptera de plus les notations suivantes :
— ˆf
ˆtpour la dérivation par rapport au temps
— Òf =
Q
cccccca
ˆf
ˆx1ˆf
ˆx2ˆf
ˆx3
R
ddddddbpour le gradient spatial
— Ò.f = ˆf1ˆx1
+ ˆf2ˆx2
+ ˆf3ˆx3
pour la divergence (f = (f1, f2, f3))
— Df
Dtpour la dérivée particulaire, définie par :
Df
Dt= ˆf
ˆt+ u1
ˆf
ˆx1+ u2
ˆf
ˆx2+ u3
ˆf
ˆx1= ( ˆ
ˆt+ u.Ò)f
1.1.2 Équations d’Euler
En toute généralité, l’évolution du fluide est régie par les équations d’Euler, ou équationsd’Euler compressibles.
Elles s’obtiennent naturellement en écrivant les bilans des quantités caractéristiques du sys-tème :
1. Bilan de masseOn traduit la conservation de la masse pour un volume V © V(t) de fluide :
4

d
dt
⁄
Vfl dV =
⁄
V
ˆfl
ˆtdV +
⁄
ˆVflu dS = 0
On obtient avec la formule de Stokes :⁄
V
ˆfl
ˆt+ Ò.(flu) dV = 0
D’où la conservation locale : ˆfl
ˆt+ Ò.(flu) = 0, ce qui s’écrit aussi :
Dfl
Dt+ flÒ.u = 0 (1.1)
2. Principe fondamental de la dynamiqueOn considère que les particules du fluide sont soumises essentiellement à la pression : laforce volumique qui en découle est f
v
= ≠Òp.En considérant une particule X de fluide, de trajectoire X(t) = (X1(t), X2(t), X3(t)), t Ø 0,le principe fondamental (volumique) appliqué le long de cette trajectoire s’écrit :
fl(t, X(t)) d
dt[u(t, X(t))] = f
v
(t, X(t))
Soit :
fl5
ˆu
ˆt+ X Õ
1ˆu
ˆx1+ X Õ
2ˆu
ˆx2+ X Õ
3ˆu
ˆx1
6= ≠Òp
Comme X Õ désigne la vitesse de la particule, et que cette relation doit être vérifiée pourtoutes les particules, on parvient naturellement à :
fl5
ˆu
ˆt+ u1
ˆu
ˆx1+ u2
ˆu
ˆx2+ u3
ˆu
ˆx1
6= ≠Òp
C’est à dire :
flDu
Dt+ Òp = 0 (1.2)
3. Bilan d’énergieLa dernière équation exprime un bilan énergétique. Sa forme générale est :
ˆE
ˆt+ Ò.[(E + p)u] = 0 (1.3)
où E = fl(e + 12 |u|2) est l’énergie totale, e est l’énergie interne.
Dans les cas qui nous intéressent, ce bilan énergétique prendra la forme d’une équationd’état de type s © s(fl, p) liant l’entropie du système à la masse volumique et à lapression. Une équation sur l’entropie établira par suite un lien supplémentaire entre massevolumique et pression (nous détaillerons ces équations précisément par la suite).
Comme l’évoque G.Alì dans l’article que nous étudierons ultérieurement, quelques no-tions élémentaires de thermodynamique permettent d’établir explicitement cette équationd’état dans le cas d’un fluide parfait satisfaisant la relation :
p = RflT (1.4)
(R est la constante des gaz parfaits ; par commodité, on considère ici une masse molaire de 1)
5

Proposition. Un fluide parfait satisfait l’équation d’état :
s = s0 + C log(pfl≠“) (1.5)
où “ > 1 est l’indice adiabatique, C = R
“ ≠ 1 est la capacité calorifique (massique) àvolume constant.
Démonstration. On part de l’identité thermodynamique :
de = Tds ≠ pd31
fl
4(1.6)
Par ailleurs, pour un fluide parfait, de = CdT . On parvient donc à :
ds + p
Tfl2 dfl = CdT
T
Puis en utilisant (1.4) :ds = C
dT
T≠ R
dfl
fl
C’est à dire :
ds = CdËlog(Tfl1≠“)
È
A nouveau avec (1.4) :
ds = Cd#log(pfl≠“)
$
Il en résulte directement l’expression (1.5).
1.1.3 Fluides incompressibles
Dans nombre de cas, cependant, il est naturel de considérer un fluide comme incompressible.Si l’on bouche l’orifice de sortie d’une pompe à air et que l’on applique une pression, il estpossible de comprimer l’air qu’elle contient. En revanche, si l’on remplace l’air par de l’eau, onne pourra presque pas déplacer le piston.
L’incompressibilité s’exprime par la condition fl ≥ fl0 = constante. Sous cette hypothèse, leséquations d’Euler (1.1) et (1.2) se simplifient en :
Ò.u = 0 (1.7)
fl0Du
Dt+ Òp = 0 (1.8)
L’objet de cette étude est d’étudier le "cas limite" que constituent les écoulements faiblementcompressibles : on intuite que les solutions compressibles vont converger vers les solutions in-compressibles dans une certaine limite, et on cherche à caractériser cette convergence.
La quantité caractéristique de la compressibilité d’un fluide est son nombre de Mach : M = uref
cref
,
ratio de la vitesse typique d’évolution du fluide et de la vitesse de propagation des ondes acous-tiques en son sein.
6

Cette dernière est définie par :
cref
=Û3
ˆp
ˆfl
4
s
(flref
) (1.9)
Dans le cas d’un fluide parfait, un simple calcul à partir de l’équation (1.5) donne l’expres-sion :
cref
=Û
“pref
flref
(1.10)
où pref
= p(flref
) à s constant.
Les écoulements incompressibles sont caractérisés par un nombre de Mach faible, c’est àdire que les perturbations du milieu se propagent presque instantanément en comparaison dumouvement global du fluide. La vitesse du son dans l’air est ainsi de 333m.s≠1, contre 1480m.s≠1
dans l’eau.
Nous allons donc étudier le comportement asymptotique des solutions dans la limite M æ 0. Unadimensionnement convenable permet de faire apparaître le nombre de Mach dans les équations :
fl = fl
flref
, p = p
pref
, u = u
uref
, x = x
lref
, t = t
tref
Avec la contrainte : uref
= lref
tref
(1.11)
En particulier, il est important de remarquer que l’adimensionnement t = t
tref
s’interprète
comme une description de l’évolution du fluide à l’échelle de temps tref
caractéristique de sonmouvement global.
Les équations (1.1) et (1.2) s’écrivent, en termes des variables adimensionnées :
Dfl
Dt+ flÒ.u = 0 (1.12)
flDu
Dt+ 1
Á2 Òp = 0 (1.13)
où Á = urefÒ
pref
/flref
à M pour un fluide parfait, compte tenu de la remarque (1.10).
Par commodité, on omettra les "barres" dans la suite.L’idée est alors de supposer l’existence d’un développement asymptotique des solutions quandÁ æ 0 de type :
f(t, x) = f0(t, x) + Áf1(t, x) + Á2f2(t, x) + ... (1.14)
Et de chercher à caractériser ses termes.
1.2 Analyse bibliographique
Une grande partie de ce stage a porté sur la compréhension du travail exposé dans l’ou-vrage de Majda [1] d’une part, et dans l’article d’Alì [2] d’autre part. Nous allons détaillersuccinctement notre interprétation des approches qui y sont choisies et des résultats qui y sontprésentés.
7

1.2.1 Travail d’A. Majda
Équations choisies
Majda traite le cas d’un écoulement isentropique dans l’espace R3 tout entier. D’après l’équa-tion d’état (1.5), la contrainte s = constante impose la relation suivante entre pression et massevolumique :
p = Afl“ , “ > 1 (1.15)
En e�ectuant l’adimensionnement (1.11), on parvient au système d’inconnues p et u :Y___]
___[
(“p)≠1 Dp
Dt+ Ò.u = 0
fl(p)Du
Dt+ 1
Á2 Òp = 0où fl(p) = (pA≠1)
1“ (1.16)
avec Á Ã M .On note alors pÁ, uÁ les solutions de (1.16) associées à des conditions initiales
pÁ(0, .) = pÁ
0 œ Hs, uÁ(0, .) = uÁ
0 œ Hs, s Ø s0 = Á32Ë + 1 = 3 (1.17)
Sous ces conditions, il y a bien existence et unicité de (pÁ, uÁ), solution de (1.16) au sens classique(C1) sur [0, T ] ◊ R3 pour un certain T > 01pour rappel, on a l’inclusion de Sobolev : Hs0(R3) µ C1(R3)
2
Stabilité uniforme
Ce premier théorème règle le problème essentiel de l’intervalle de définition : il assure quecelui-ci ne décroit pas vers {0} lorsque Á æ 0 si l’on impose certaines contraintes sur les conditionsinitiales (1.17).
Théorème 1. Soit s0 = Á32Ë+1 = 3. On suppose qu’il existe P0 > 0, R > 0 tels que les données
initiales satisfont :’Á > 0, ||1
Á(pÁ
0 ≠ P0)||s0 + ||uÁ
0||s0 Æ R (1.18)
Alors il existe T0 > 0 et Á0 > 0 tels que pour tout Á Æ Á0, la solution classique (pÁ, uÁ) du système(1.16) est définie sur [0, T0].On a de plus, pour Á Æ Á0 :
1Á
(pÁ ≠ P0), uÁ œ C0([0, T0], Hs0) fl C1([0, T0], Hs0≠1) (1.19)
’t œ [0, T0], ||1Á
(pÁ(t, .) ≠ P0)||s0 + ||uÁ(t, .)||
s0 Æ RÕ (1.20)
où RÕ est une certaine constante.
Convergence
Majda démontre la convergence des solutions de (1.16) vers celles des équations d’Eulerincompressibles, sous réserve que les conditions initiales satisfassent des hypothèses de faiblecompressibilité ("[...] the initial data is ’prepared’, that is, they are compatible with the limitingincompressible equations.", Alì)
8

Théorème 2. On suppose l’existence de u0, u10, p1
0 et P0 > 0 tels que les conditions initiales(1.17) soient de la forme particulière :
uÁ
0(x) = u0(x) + Áu10(x)
pÁ
0(x) = P0 + Á2p10(x) avec Ò.u0 = 0 (1.21)
On suppose qu’elles vérifient la contrainte (1.18). Soit [0, T0] l’intervalle de temps fixe donnépar le Théorème 1. Il existe alors u, p œ LŒ([0, T0], Hs0) tels que :
uÁ ≠≠≠æÁæ0
u dans C0([0, T0], Hs0≠–
loc
) pour tout – > 0 (1.22)
ÒpÁ ≠≠≠æÁæ0
Òp pour la convergence faible * dans LŒ([0, T0], Hs0≠1) (1.23)
Et (u, p) est solution classique des équations d’Euler incompressibles sur [0, T0] :u, p œ C0([0, T0], Hs0) fl C1([0, T0], Hs0≠1), et on a
Y]
[
Ò.u = 0fl0
Du
Dt+ Òp = 0
où fl0 = fl(P0) = (P0A≠1)1“ (1.24)
avec la condition initiale u(0, .) = u0.
1.2.2 Article de G. Alì
Équations choisies
Alì traite quant à lui le cas d’un fluide évoluant dans un domaine �t
= �t
(�0) borné etdépendant continûment du temps t : on imagine que la frontière du domaine est déformée aucours du temps par un opérateur extérieur (un cas typique d’application étant celui du piston).Il considère par ailleurs l’équation d’état plus complexe :
Dp
Dt+ “pÒ.u = 0 (1.25)
Après adimensionnement selon (1.11), on parvient au système :Y_________]
_________[
Dfl
Dt+ flÒ.u = 0
flDu
Dt+ 1
Á2 Òp = 0
Dp
Dt+ “pÒ.u = 0
(1.26)
avec Á Ã M , et les conditions initiales/au bord :
fl(0, x) = fl0(x), u(0, x) = u0(x), p(0, x) = p0(x) sur �0 (1.27)
u.nt
= u�.nt
sur ˆ�t
(1.28)
où nt
désigne la normale sortante à �t
et u� désigne la vitesse de la frontière (au temps t) définiepar l’expression :
u�(x) = ˆ�t
ˆt(�≠1
t
(x)), x œ ˆ�t
9

Analyse à une échelle de temps
On considère dans un premier temps un développement des solutions à une seule échelle detemps t qui, après l’adimensionnement (1.11), caractérise le mouvement global du fluide :
fl(t, x) = fl0(t, x) + Áfl1(t, x) + O(Á2)u(t, x) = u0(t, x) + Áu1(t, x) + O(Á2)p(t, x) = p0(t, x) + Áp1(t, x) + Á2p2(t, x) + O(Á3)
(1.29)
Il s’agit d’un ansatz : contrairement à Majda qui démontre rigoureusement la convergence dessolutions de son système, Alì ne fait que supposer l’existence d’un tel développement, et établitformellement les propriétés qui le caractérisent.
Théorème 3. Supposons que (fl, u, p) est solution du système (1.26) et admet le développement(1.29). Alors aux deux premiers ordres en Á, la pression est uniquement fonction du temps et estdonnée par :
p0(t) = C0|�t
|≠“
p1(t) = C1p0(t) où C0, C1 > 0 et |�t
| est le volume du domaine. (1.30)
Les équations suivantes (équivalent des équations incompressibles en domaine variable) sontégalement vérifiées :
1fl0
Dfl0
Dt= ≠ 1
|�t
|d|�
t
|dt
fl0 Du0
Dt+ Òp2 = 0
Ò.u0 = 1|�
t
|d|�
t
|dt
où D
Dt= ˆ
ˆt+ u0.Ò (1.31)
Développement Multi-échelle
On constate qu’une contrainte nécessaire sur les conditions initiales (1.27) pour que leséquations (1.30), (1.31) soient vérifiées est :
u0(x) = u00(x) + O(Á) avec Ò.u0
0 = constantep0(x) = constante + O(Á2)
On retrouve donc des contraintes similaires aux conditions initiales faiblement compressibles(1.21). Si l’on veut décrire le comportement d’un écoulement à faible nombre de Mach ne vérifiantpas ces restrictions initiales, il est nécessaire de prendre en compte la propagation des ondessonores dans le fluide, et donc d’inclure une autre échelle de temps dans le développement :l’échelle acoustique · = t
Á.
On considère donc à présent le développement suivant :
fl(t, ·, x) = fl0(t, ·, x) + Áfl1(t, ·, x) + O(Á2)u(t, ·, x) = u0(t, ·, x) + Áu1(t, ·, x) + O(Á2)p(t, ·, x) = p0(t, ·, x) + Áp1(t, ·, x) + Á2p2(t, ·, x) + O(Á3)
(1.32)
Les grandeurs sont vues comme des fonctions des deux variables indépendantes t et · , et larelation ”· = t
Á” est uniquement codée par l’opérateur de dérivation dans le système (1.26), qui
devient :ˆ
ˆt© ˆ
ˆt+ 1
Á
ˆ
ˆ·(1.33)
10

Afin d’accentuer la distinction entre les deux échelles de temps considérées, Alì introduit deplus la décomposition suivante (sous réserve qu’elle fasse sens) :
w(t, ·, x) = w(t, x) + ”w(t, ·, x)
où
Y]
[w(t, x) = ÈwÍ(t, x) = lim
·æŒ1·
⁄·
0w(t, s, x)ds (moyenne sur les temps courts)
È”wÍ = 0 (échelle accoustique)(1.34)
On a alors un équivalent du théorème précédent :
Théorème 4. Supposons que (fl, u, p) est solution du système (1.26) et admet le développement(1.32). Alors p0, p1 sont uniquement fonctions du temps et données par :
p0(t) = C0|�t
|≠“
p1(t) = C1p0(t) où C0, C1 > 0 et |�t
| est le volume du domaine. (1.35)
On a de plus :
1fl0
Dfl0
Dt= ≠ 1
|�t
|d|�
t
|dt
fl0 Du0
Dt+ Òp2 = ≠Ò.(fl0È”u0 ¢ ”u0Í)
Ò.u0 = 1|�
t
|d|�
t
|dt
où
D
Dt= ˆ
ˆt+ u0.Ò
D
Dt= ˆ
ˆt+ u0.Ò
(1.36)
Alì établit par ailleurs des équations acoustiques explicites liant les grandeurs ”fl, ”u et ”p, quenous ne présenterons pas ici par souci de commodité.
11

Chapitre 2
Travaux personnels
Suite à la lecture et à l’analyse des deux ouvrages présentés précédemment, nos travauxse sont organisés en di�érents axes. D’une part, nous avons souhaité approfondir la notion dedéveloppement à échelles multiples au travers d’exemples éloquents. D’autre part, nous avonstravaillé à une généralisation des résultats de convergence décrits au chapitre précédent. Enfin,nous nous sommes intéressé aux méthodes permettant de résoudre numériquement les équationsd’Euler.
2.1 Développements multi-échelle
Comme nous l’avons déjà évoqué, le problème des écoulements faiblement compressiblesmet naturellement en évidence deux échelles de temps : l’échelle acoustique (temps court) etl’échelle du mouvement global (temps long). Majda e�ectue une analyse à une échelle de temps(développement en temps long) tandis qu’Alì met un place un développement formel à échellesmultiples pour décrire plus précisément le comportement des solutions lorsque le nombre deMach tend vers zéro.
Cette notion de développement multi-échelle, tant dans ses fondements que dans sa mise enplace pratiquement, nous a paru di�cile à appréhender de prime abord. C’est pourquoi nousl’avons appliquée à diverses équations di�érentielles ordinaires issues de la physique, principale-ment tirées de l’article de Pierre-Yves Lagrée [3].
2.1.1 Problème à plusieurs échelles de temps
Le premier exemple simple auquel nous nous sommes intéressés est celui de l’oscillateurfaiblement amorti. La position y © y(t) d’un tel oscillateur à l’instant t satisfait l’équation :
md2y
dt+ —
dy
dt+ ky = 0 (2.1)
On désire étudier l’évolution de y dans le cas limite — æ 0. Deux temps caractéristiques sedégagent alors très naturellement :
— ·1 =Ò
m/k : temps court, période des oscillations harmoniques lorsque — = 0.— ·2 = m/— : temps long, caractéristique de l’amortissement.
Un adimensionnement en temps court t = t/·1 conduit par exemple à l’équation :
d2y
dt2 + Ády
dt+ y = 0 (2.2)
où Á = ·1·2
æ 0.
12

Une résolution complète de ce problème (analyse à une et deux échelles de temps) est proposéedans [3]. Dans le même esprit, on va ici proposer des développements autour du problème deFriedrich : Y
__]
__[
Ád2f
dt2 + df
dt= 1
2
f(0) = 0, f(1) = 1Á æ 0 (2.3)
Ce système admet pour solution exacte :
fex
(t) = 1 ≠ e≠tÁ
2(1 ≠ e≠1Á )
+ t
2 (2.4)
Nous allons procéder comme si nous ignorions l’expression de cette solution, et chercher à lacaractériser au travers de di�érents développements.Il s’agit d’un système à deux échelles de temps :
— t, échelle de temps longue— · = t
Á, échelle de temps courte
2.1.2 Analyse à une échelle
Dans un premier temps, on cherche à déterminer des solutions approchées en temps long eten temps court.
En temps long
On part de l’équation en temps long :
Ád2f
dt2 + df
dt= 1
2 (2.5)
On fait tendre formellement Á vers 0, et on ne conserve que la condition "en temps long", onparvient donc à : Y
__]
__[
df
dt= 1
2
f(1) = 1(2.6)
Soit l’expression : flong
(t) = 1 + t
2 , qui constitue bien une approximation de fex
en tempslong.
En temps court
On souhaite cette fois se placer à l’échelle · = t
Á. L’équation (2.5) devient, après changement
de variable :d2f
d·2 + df
d·= Á
2 (2.7)
On fait tendre Á vers 0, et on ne conserve que la condition "en temps court" :Y__]
__[
d2f
d·2 + df
d·= 0
f(0) = 0(2.8)
13

Soit une expression de la forme : fcourt
(·) = A(1 ≠ e≠· ). On détermine ensuite la constanteA en imposant la condition raisonnable suivante (développée par Van Dyke [4]) :
limtæ0
flong
(t) = lim·æŒ
fcourt
(·) (2.9)
On obtient ainsi fcourt
(·) = 1 ≠ e≠·
2 , qui constitue bien une approximation de fex
en tempscourt.
Solution composée
Il est possible de raccorder ces deux solutions en les sommant et en soustrayant leur limitecommune (2.9) : on obtient ainsi
fcomposée
(t) = 1 ≠ e≠t/Á + t
2 (2.10)
Les résultats obtenus, résumés dans une série de graphes (Annexe B) sont satisfaisants.
2.1.3 Analyse multi-échelle
On emploie maintenant une toute autre méthode, qui consiste à voir les solutions comme desfonctions de deux variables indépendantes t et · . Les opérateurs di�érentiels deviennent alors :
Y____]
____[
d
dt© ˆ
ˆt+ 1
Á
ˆ
ˆ·
d2
dt2 © ˆ2
ˆt2 + 2Á
ˆ2
ˆtˆ·+ 1
Á2ˆ2
ˆ·2
(2.11)
Et l’équation (2.5) devient :
1Á
Aˆ2f
ˆ·2 + ˆf
ˆ·
B
+A
2 ˆ2f
ˆtˆ·+ ˆf
ˆt≠ 1
2
B
+ Áˆ2f
ˆt2 = 0 (2.12)
On suppose que la fonction f admet un développement de la forme :
f(t, ·) = f0(t, ·) + Áf1(t, ·) + O(Á2) (2.13)
Ce développement est supposé uniformément valable (conditions de solvabilité, cf [3]). On injectele développement (2.13) dans les équations et on identifie les termes de même ordre en Á.Le terme d’ordre Á≠1 donne :
ˆ2f0ˆ·2 + ˆf0
ˆ·= 0 (2.14)
Soit une expression de la forme : f0(t, ·) = A(t)e≠· + B(t).Le terme d’ordre Á0 donne ensuite :
ˆ2f1ˆ·2 + ˆf1
ˆ·+ 2 ˆ2f0
ˆtˆ·+ ˆf0
ˆt≠ 1
2 = 0 (2.15)
Ce qui se résout en :
f1(t, ·) = ≠!AÕ(t)· + AÕ(t) + C(t)
"e≠· +
312 ≠ BÕ(t)
4· + D(t) (2.16)
14

Pour que le développement soit uniformément valable, il est ainsi nécessaire d’avoir :
AÕ(t) = 0 et31
2 ≠ BÕ(t)4
= 0
Le terme d’ordre Á0 du développement se met donc sous la forme : f0(t, ·) = C0e≠· + t
2 + C1.On peut finalement déterminer les constantes C0, C1 en exprimant les conditions aux bords de(2.3). Celles-ci deviennent : I
f0(t = 0, · = 0) = 0f0(t = 1, · = Œ) = 1 (2.17)
On trouve C1 = ≠C0 = 1/2 et donc l’expression finale :
f0(t, ·) = 1 ≠ e≠· + t
2 (2.18)
On retrouve ainsi, par un développement à échelles multiples, la solution composée desdéveloppements en temps long et en temps court présentée précédemment. Bien-sûr on pourraitpoursuivre ce raisonnement et déterminer les termes suivants dans le développement.
Des graphes de comparaison entre la solution exacte et cette solution approchée ainsi qu’uncode de résolution en Maple sont présentés en Annexe B.
2.2 Généralisation des résultats de A. Majda
Outre la compréhension et l’analyse des deux ouvrages présentés précédemment, l’un des axesde recherche de ce stage a été l’extension des résultats développés par A. Majda au cas d’uneéquation d’état explicite plus générale. Il s’agit d’un problème complexe qui pourrait constitueren soi un véritable sujet de recherche. Nous ne sommes pas parvenus à le résoudre. Dans la suite,nous allons tout de même poser le problème et développer les résultats partiels auxquels nousavons abouti.
2.2.1 Système généralisé
On considère le système compressible, modélisant un écoulement isentropique :Y________]
________[
Dfl
Dt+ flÒ.u = 0
flDu
Dt+ Òp = 0
p = Ppref ,flref (fl)
(2.19)
où Ppref ,flref est une fonction régulière, positive sur son domaine, strictement croissante,
convexe, qui dépend en général des valeurs de références du système pref
, flref
données.
La convexité de la pression comme fonction de la masse volumique découle en fait du secondprincipe de la thermodynamique, comme développé dans [5]. Une interprétation simple peutêtre la suivante : admettant qu’une onde acoustique se propage plus rapidement dans un milieu
plus dense, c(fl) =Û3
ˆp
ˆfl
4
s
(fl) =Ò
P Õpref ,flref
(fl) doit croître avec fl. C’est exactement dire que
Ppref ,flref doit être convexe.
15

Un exemple clé est celui du "sti�en gas" (qui modélise des fluides tels que l’eau dans les conditionsstandards) :
Ppref ,flref (fl) = ≠fi
ref
“+
3p
ref
+ firef
“
4 Afl
flref
B“
oùI
firef
© firef
(pref
, flref
) > 0“ > 1 (2.20)
Cette équation d’état peut se réécrire sous la forme générale :
Ppref ,flref (fl) = p
ref
Q
a1 +ÂP ( fl
flref)
‰
R
b (2.21)
avec les conditions de normalisation :
ÂP (1) = 0 ; ÂP Õ(1) = 1 (2.22)
Il su�t en e�et d’imposer la relation pref
“pref
+ firef
= ‰ = constante et de poser ÂP (r) = (r“≠1)/“.
On souhaite établir des résultats de stabilité uniforme et de convergence similaire à ceuxprésentés dans la section 1.2.1 pour ce nouveau système. Les quelques preuves et élémentsprésentés dans les paragraphes suivants s’inspirent et se réfèrent aux raisonnements détaillésdans les pages 51 à 64 de l’ouvrage d’A. Majda [1].
2.2.2 Adimensionnement
On cherche à faire apparaître le nombre de Mach en adimensionnant les équations : one�ectue l’adimensionnement (1.11), en imposant de plus la relation : p
ref
= flref
P Õpref ,flref
(flref
).Le système se réécrit alors facilement, en termes des variables adimensionnées (on omet les
"barres" par commodité) : Y________]
________[
Dfl
Dt+ flÒ.u = 0
flDu
Dt+ 1
Á2 Òp = 0
p = P (fl)
(2.23)
où Á = uref
P Õ(flr
ef)= M et P (r) =
Ppref ,flref (fl
ref
.r)fl
ref
P Õpref ,flref
(flref
) .
On suppose dans la suite que la fonction Ppref ,flref est telle que l’adimensionnée P ne dépend
pas des paramètres pref
, flref
.C’est le cas en particulier pour la large classe des fonctions qui se mettent sous la forme (2.21)avec les conditions (2.22). En e�et, on a alors P Õ
pref ,flref(fl
ref
) = pref
‰flref
et on obtient P (r) =
‰ + ÂP (r).
Remarquons que P est toujours régulière, positive sur son domaine, strictement croissante,convexe, et de plus : P Õ(1) = 1.Puisque p = P (fl), ou encore fl = R(p) (R = P ≠1), (2.23) peut être vu comme un systèmed’inconnues (p, u) ou (fl, u). On note à nouveau (pÁ, flÁ, uÁ) la solution du système associée à desconditions initiales décrites par (1.17).
16

2.2.3 Argument formel
L’argument formel présenté dans [1] aux pages 53-55 se généralise sans peine au nouveausystème. On suppose l’existence d’un développement asymptotique :
uÁ = u0 + Áu1 + Á2u2 + O(‘3)pÁ = p0 + Áp1 + Á2p2 + O(‘3)flÁ = fl0 + Áfl1 + Á2fl2 + O(‘3)
(2.24)
où, en identifiant les termes du développement :
fl0 = R(p0) , fl1 = p1RÕ(p0) , fl2 = p2RÕ(p0) + (p1)2
2 RÕÕ(p0)
En injectant le développement dans les équations et en identifiant les puissances de Á, ondémontre formellement que p0 = P0 = constante (et donc fl0 = constante) et que (u0, p2)satisfont les équations d’Euler incompressibles :
Y]
[fl0 Du0
Dt+ Òp2 = 0
Ò.u0 = 0(2.25)
De plus, p1 = P1 = constante également. On peut toujours poser P1 = 0 avec des conditionsinitiales appropriées. Pour espérer avoir un tel résultat de convergence, il faut nécessairementque les conditions initiales soient de la forme (1.21).
2.2.4 Stabilité uniforme
Dans un premier temps, il semble raisonnable de vouloir étendre le résultat de stabilité uni-forme du 1.2.1 à ce nouveau système. La démonstration proposée ici est calquée sur celle e�ectuéepar Majda : les raisonnements se généralisent sans souci, et ne font pas appel à l’hypothèse deconvexité de P .Théorème 5. Le Théorème 1 reste valable pour le système (2.23).Démonstration. On réécrit (2.23) comme un système d’inconnue (pÁ, uÁ) évoluant dans un do-maine :
G = {(p, u) | |p ≠ P0| Æ P02 , |u| Æ RÕ} où RÕ > 0 est une certaine constante.
Remarquons que R(p) > 0 lorsque (p, u) œ G, car p > 0 est R est strictement croissante.On introduit :
pÁ = 1Á
(pÁ ≠ P0) ; U Á =A
pÁ
uÁ
B
œ R4 (2.26)
Le système (2.23) se réécrit, en terme de U Á :Y____]
____[
RÕ(P0 + ÁpÁ)R(P0 + ÁpÁ)
DpÁ
Dt+ 1
ÁÒ.uÁ = 0
R(P0 + ÁpÁ)DuÁ
Dt+ 1
ÁÒpÁ = 0
(2.27)
Ce qui s’écrit encore comme un système de la forme :
AÁ
0ˆU Á
ˆt+
3ÿ
j=1AÁ
j
ˆU Á
ˆxj
= 0 (2.28)
Il su�t maintenant de vérifier les conditions suivantes :
17

1. AÁ
j
= Aj
(‘U Á, U Á) + 1‘
A0j
, 1 Æ j Æ 3, oùles fonctions A
j
sont régulières,les A0
j
sont des matrices constantes symétriques,2. AÁ
0 = A0(ÁU Á) où la fonction A0 vérifie : pour ◊0 > 0 fixé, il existe une constante C > 0telle que :
CI Æ A0(v) Æ C≠1I, v œ G, |v| Æ ◊0 (2.29)
On pourra ensuite appliquer le Lemme 2.4 de [1] (résultat général) et conclure la preuve de lamême manière que Majda.
On exprime facilement ces matrices à partir de la forme (2.27) :
AÁ
0 =
Q
ccccca
RÕ(P0 + ÁpÁ)R(P0 + ÁpÁ) 0 0 0
0 R(P0 + ÁpÁ) 0 00 0 R(P0 + ÁpÁ) 00 0 0 R(P0 + ÁpÁ)
R
dddddb= A0(‘U Á)
et la propriété (2.29) découle immédiatement de la stricte positivité et de la continuité descoordonnées de A0 sur le compact G fl {|v| Æ ◊0}.
AÁ
1 =
Q
cccccca
RÕ(P0 + ÁpÁ)R(P0 + ÁpÁ) uÁ
11Á
0 01Á
R(P0 + ÁpÁ)uÁ
1 0 00 0 R(P0 + ÁpÁ)uÁ
1 00 0 0 R(P0 + ÁpÁ)uÁ
1
R
ddddddb
donc AÁ
1 = A1(ÁU Á, U Á) + 1Á
Q
ccca
0 1 0 01 0 0 00 0 0 00 0 0 0
R
dddb
et la fonction AÁ
1 est bien régulière sur G2. Il en va exactement de même pour AÁ
2 et AÁ
3, quenous n’expliciterons pas ici par souci de concision.
2.2.5 Vers la convergence
Il resterait maintenant à établir la convergence des solutions à proprement parler, c’est àdire à étendre le Théorème 2 au système généralisé. De manière générale, dans des problèmesde passage à la limite dans des termes non-linéaires, une propriété de convexité permet souventde conclure...
2.3 Résolution numérique des équations d’Euler
Dès le début du stage, nous avons nourri le désir de réaliser un code résolvant les équationsd’Euler, dans le but de donner un peu plus de "réalité" aux écoulements de fluides que nousmanipulions. Les premières tentatives s’appuyant sur la méthode des éléments finis furent unéchec. Peu après la soutenance de mi-parcours, nous avons assisté à une série de cours sur laméthode des volumes finis (MVF), donné par M. Ghidaglia, qui nous a permis, à terme, deréaliser ce code.
Nous allons ici détailler succinctement le schéma numérique utilisé.
18

2.3.1 Schéma VFFC
On cherche à résoudre numériquement, en une dimension d’espace, les équations d’Eulercompressibles données par (1.1), (1.2) et une équation d’état explicite p = P (fl).
Le système peut être vu comme un système d’inconnue (fl, u) ou encore d’inconnue v =A
flflu
B
œ R2.
Il s’agit d’un système de lois de conservation, qui se met sous la forme :
ˆv
ˆt+ ˆF (v)
ˆx= 0 (2.30)
où F (v) =
Q
av2
v22
v1+ P (v1)
R
b
On cherche à résoudre le système (2.30) sur un domaine [0, T ] ◊ [0, X] fixé. On se donne unpas de temps �t, un pas d’espace �x, et on découpe le domaine spatial [0, X] en volumes finis :
[0, X] =€
1ÆjÆJ
Kj
Kj
= [xj≠ 1
2, x
j+ 12] = [(j ≠ 1)�x, j�x], x
j
= (xj≠ 1
2+ x
j+ 12)/2
(2.31)
On note de plus tn
= n�t pour 0 Æ n Æ N et on pose :
vn
j
= (vn
j,1, vn
j,2) = 1�x
⁄x
j+ 12
x
j≠ 12
v(tn
, x)dx ƒ v(tn
, xj
) (2.32)
fn
j+ 12
= 1�t
⁄tn+1
tn
F (v(t, xj+ 1
2))dt ƒ F (v(t
n
, xj+ 1
2)) (2.33)
Le schéma volumes finis général s’écrit alors :
vn+1j
≠ vn
j
�t+
fn
j+ 12
≠ fn
j≠ 12
�x= 0 (2.34)
Le schéma employé ici est le VFFC (volumes finis à flux caractéristiques) :Y]
[vn+1
j
= vn
j
≠ �t
�x(fn
j+ 12
≠ fn
j≠ 12)
fn
j+ 12
= g(vn
j
, vn
j+1)(2.35)
où, en posant A =3
ˆF
ˆv
4(Jacobienne de F ), la fonction g est donnée par :
g(v, w) = F (v) + F (w)2 ≠ sign
3A
3v + w
2
44(F (w) ≠ F (v)) (2.36)
On définit la fonction sign de la manière suivante : pour une matrice M = Pdiag(⁄1, ..., ⁄n
)P ≠1
diagonalisable à valeurs propres réelles (ce qui est toujours vrai dans le cas qui nous intéresse),sign(M) = Pdiag(sign(⁄1), ..., sign(⁄
n
))P ≠1.
Remarquons finalement que le schéma (2.35) ne fait pas sens lorsque j = 1 ou j = J : il nousfaut définir les grandeurs fn
12
et fn
J+ 12.
19

On veut exprimer une condition de non-pénétration du bord, c’est à dire u = 0 au bord, ou
encore F (v) =A
0P (v1)
B
au bord. On pose donc naturellement :
fn
12
=A
0P (vn
1,1)
B
fn
J+ 12
=A
0P (vn
J,1)
B (2.37)
Sous réserve que l’on se donne la distribution initiale (v0j
)1ÆjÆJ
, on peut alors déterminertous les vn
j
pour 1 Æ j Æ J et 0 Æ n Æ N .
2.3.2 Code réalisé
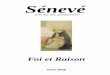
Le code (Annexe A) implémenté en Matlab utilise le schéma VFFC pour résoudre les équa-tions d’Euler avec l’équation d’état de Majda (P (fl) = fl“) sur le domaine [0, 1.5] ◊ [0, 1] avec lesconditions initiales :
fl0(x) = 1 + x,u0(x) = 0,
x œ [0, 1] (2.38)
Il trace, à chaque pas de temps, les graphes représentant la distribution de masse volumiqueet de vitesse au sein du fluide. Il calcule de plus à chaque pas de temps une approximation (parla méthode des trapèzes) de l’intégrale
⁄
[0,1]fl(t, x)dx, masse totale de fluide dans le domaine
censée rester constante au cours du temps.
Distributions au temps t = 0.2 pour l’exemple proposé
20

Les résultats obtenus sont globalement très satisfaisants. On peut néanmoins constater quela masse totale varie légèrement au cours du temps (la masse initiale était ici de 1.5).
Ceci est dû au fait que la vitesse aux bords n’est pas rigoureusement nulle, et que la massepeut donc s’échapper ou au contraire s’immiscer dans le système par les bords. En e�et lesconditions aux bords (2.37) choisies n’expriment pas exactement la non-pénétration (u = 0 auxbords) car P (vn
1,1) et P (vn
J,1) désignent les pressions internes et non les pressions à l’interfaceavec les bords... Selon le type d’écoulement considéré, il est possible de modifier ces conditionsaux bords pour y obtenir une vitesse rigoureusement nulle, mais nous ne rentrerons pas ici dansde telles considérations.
21

Bibliographie
[1] A. Majda. Compressible Fluid Flow and Systems of Conservation Laws in Several SpaceVariables. Number 53 in Applied Mathematical Science. Springer-Verlag, 1984.
[2] G. Ali. Low mach number flows in time-dependent domains. SIAM Journal on AppliedMathematics, 63 :2020–2041, 2003.
[3] Pierre-Yves Lagrée. Multiscale hydrodynamic phenomena : Méthodes multi échelles : Mé-thode des échelles multiples.
[4] M. Van Dyke. Perturbation methods in Fluid Mechanics. 1975.[5] H. B. Callen. Thermodynamics and an Introduction to Thermostatistics. John Wiley and
Sons, 1985.
22

Annexe A
Code MATLAB
Fonction matsignfunction [M] = matsign(A)
[P,D]=eig(A); %A=P*D*P^(-1)M=P*(sign(D))*P^(-1);
end
Schéma VFFC pour Euler 1D
figure(1)clf
dt=0.01; %pas de tempsdx=0.05; %pas d’espaceT=1.5; %résolution sur [0,T] en tempsN=floor(T/dt);T=N*dt;X=1; %résolution sur [0,X] en espaceJ=floor(X/dx);X=J*dx;
gamma = 7/5;%indice adiabatiqueP=@(r) r.^gamma; %fonction d’étatDP=@(r) gamma*r.^(gamma-1); %dérivée de P
rho0=@(x) 1+x; %distribution de masses volumiques initialeu0=@(x) 0; %distribution de vitesses initiale
F=@(v) [v(2),v(2)^2/v(1)+P(v(1))];A=@(v) [[0,1];[-(v(2)/v(1))^2+DP(v(1)), 2*v(2)/v(1)]];
g=@(v,w) (F(v)+F(w))/2 - (matsign(A((v+w)/2))*(F(w)’-F(v)’))’;
%V=[rho,rho*u] :V1=zeros(J,N+1); %v1(j,n) : j-ième case au n-ième tempsV2=zeros(J,N+1); %v2(j,n) : j-ième case au n-ième temps
%initialisation :Y=[dx/2:dx:(X-dx/2)];V1(:,1) = rho0(Y)’;V2(:,1) = V1(:,1).*u0(Y)’;
%calcul de la masse totale initiale :
I=0;for j=1:J-1
I=I+dx*(V1(j,1)+V1(j+1,1))/2;end
23

%plot initial :
subplot(2,1,1),plot(Y,V1(:,1),’-*b’);axis([0 X 1 2])legend(’Masse volumique’,’Location’,’SouthWest’)title([’Masse totale : ’,num2str(I)])subplot(2,1,2),
plot(Y,V2(:,1)./V1(:,1),’-*r’);axis([0 X -0.3 0.3])legend(’Vitesse’,’Location’,’SouthWest’)title([’Temps : t = ’,num2str(0)])
for n=1:Nfor j=1:J
if j==1fmoins = [0,P(V1(1,n))]; %(correspond à la condition de non-pénétration du bord)
elsefmoins = g([V1(j-1,n),V2(j-1,n)],[V1(j,n),V2(j,n)]);
end
if j==Jfplus = [0,P(V1(J,n))]; %(correspond à la condition de non-pénétration du bord)
elsefplus = g([V1(j,n),V2(j,n)],[V1(j+1,n),V2(j+1,n)]);
end
V1(j,n+1)=V1(j,n) - dt/dx*(fplus(1)-fmoins(1));V2(j,n+1)=V2(j,n) - dt/dx*(fplus(2)-fmoins(2));
end
%calcul de la masse totale :
I=0;for j=1:J-1
I=I+dx*(V1(j,n)+V1(j+1,n))/2;end
%plot :
drawnow
subplot(2,1,1),plot(Y,V1(:,n+1),’-*b’);axis([0 X 1 2])legend(’Masse volumique’,’Location’,’SouthWest’)title([’Masse totale : ’,num2str(I)])
subplot(2,1,2),plot(Y,V2(:,n+1)./V1(:,n+1),’-*r’);axis([0 X -0.3 0.3])legend(’Vitesse’,’Location’,’SouthWest’)title([’Temps : t = ’,num2str(n*dt)])
end
24

Annexe B
Développement multi-échelle
Code Maple
Code Maple utilisé pour produire les figures ci-après :restart; with(plots); Eq := epsilon*(diff(f(t), ‘$‘(t, 2)))+diff(f(t), ‘$‘(t, 1)) = 1/2;ICS_Eq := f(0) = 0, f(1) = 1;
#La variable lente est t#On adimensionne en posant tau = t/epsilonEq2 := diff(f(tau), ‘$‘(tau, 2))+diff(f(tau), ‘$‘(tau, 1)) = (1/2)*epsilon;D1 := unapply(diff(f(t, tau), ‘$‘(t, 1))+epsilon*(diff(f(t, tau), ‘$‘(tau, 1))), f);D2 := unapply(diff(f(t, tau), ‘$‘(t, 2))+2*epsilon*(diff(f(t, tau), ‘$‘(tau, 1), ‘$‘(t, 1)))
+ epsilon^2*(diff(f(t, tau), ‘$‘(tau, 2))), f);F(t,tau):= F0(t,tau) + epsilon*F1(t,tau) + epsilon^(2)*F2(t,tau);
#Function definitionl := D2(F)+D1(F)-(1/2)*epsilon;
#la nouvelle équationsl := convert(series(l, epsilon, 3), polynom);
#On la met sous la bonne formeOrdre0 := coeff(sl, epsilon, 0); Ordre1 := coeff(sl, epsilon, 1); Ordre2 := coeff(sl, epsilon, 2);
#On récupère chaque ordre de epsilonf0 := unapply(rhs(dsolve(Ordre0, F0(t, tau))), t, tau);ICS0 := f0(0, 0) = 0, f0(infinity, 1) = 1;
_F1(0) + _F2(0) = 0, _F1(1) = 1F0 := f0;f1 := unapply(rhs(dsolve(Ordre1, F1(t, tau))), t, tau);
#-d / dtau (_F1) + 1/2 doit être nul pour avoir f1 bornée en temps.#d / dtau (_F2) * t * exp(-t) est un terme séculaire, il faut l’annuler aussi._F1 := unapply((1/2)*tau+1/2, tau);_F2 := unapply(-1/2, tau);F1 := f1; f2 := unapply(rhs(dsolve(Ordre2, F2(t, tau))), t, tau);
#d/dtau de _F3 et _F4 doivent être annulés (facteurs d’un terme séculaire)._F4 := 0; _F3 := 0; dsolve(Ordre2, F2(t, tau));fex := unapply(simplify(rhs(dsolve({epsilon*(diff(f(t), ‘$‘(t, 2)))+diff(f(t), ‘$‘(t, 1)) = 1/2, f(0) = 0, f(1) = 1},
f(t)))), t);#fex : solution exacteG := unapply(fex(t)-f0(t/epsilon, t)-epsilon*f1(t/epsilon, t), t); simplify(G(t));
#G : erreur entre fex et l’approximationanimate(plot, [[G(t), fex(t), f0(t/epsilon, t)], t = 0 .. 5, color = [red, blue, green]],
epsilon = .5 .. 0, frames = 180);
25

Graphiques
Figure B.1 – Développement raccordé. Rouge : solution exacte - Vert : temps court - Bleu :temps long - Noir : Solution composée
26

Figure B.2 – Développement multi-échelle. Bleu : solution exacte - Vert : Solution approchée- Rouge : di�érence
27