Embed Size (px)
Citation preview

Conservatoire Nationaldes Arts et Métiers
MAA107
Mathématiques du signal déterministe
Nelly POINT
11 octobre 2011

0

Table des matières
1 Intégration 31.1 Méthodes d’intégration : rappels . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Utilisation de la linéarité . . . . . . . . . . . . . . . . . . . . . . . . 31.1.2 Changement de variables . . . . . . . . . . . . . . . . . . . . . . . . 31.1.3 Intégration par parties . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Généralisation de la notion d’intégrale . . . . . . . . . . . . . . . . . . . . 41.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.2 Intégrale généralisée : cas d’un domaine non borné . . . . . . . . . . 51.2.3 Intégrale généralisée : cas d’une fonction non bornée . . . . . . . . . 6
1.3 Intégrales double ou triple . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Les espaces L1(I) et L2(I) 112.1 Espace L1(I) des fonctions sommables sur I . . . . . . . . . . . . . . . . . 112.2 Espace L2(I) des fonctions
de carré sommable sur I . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3 Relation entre L1(I) et L2(I) . . . . . . . . . . . . . . . . . . . . . . . . . 142.4 Compléments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.5 Rappels sur les espaces vectoriels . . . . . . . . . . . . . . . . . . . . . . . 16
3 Les séries de Fourier 193.1 Introduction et rappels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Série de Fourier trigonométrique . . . . . . . . . . . . . . . . . . . . . . . . 203.3 Série de Fourier complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.4 Convergence des sommes partielles de la série de Fourier dans L2(0, T ) . . 233.5 Convergence ponctuelle des sommes
partielles de la série de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . 243.6 Dérivation terme à terme . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.7 Vérification des résultats, erreurs usuelles . . . . . . . . . . . . . . . . . . . 243.8 Remarques générales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Le produit de convolution 274.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.2 Propriétés du produit de convolution . . . . . . . . . . . . . . . . . . . . . 28
1

2
4.3 Le produit de convolution régularise . . . . . . . . . . . . . . . . . . . . . . 294.4 Utilité du produit de convolution . . . . . . . . . . . . . . . . . . . . . . . 314.5 Intercorrélation, autocorrélation . . . . . . . . . . . . . . . . . . . . . . . . 32
4.5.1 Cas d’un signal réel . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5 La transformation de Laplace 355.1 Définition de la transformation de Laplace . . . . . . . . . . . . . . . . . . 355.2 Propriétés générales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.3 Utilisation de la transformation de Laplace . . . . . . . . . . . . . . . . . . 39
6 La transformée de Fourier 416.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.2 Transformée de Fourier dans L1(IR) . . . . . . . . . . . . . . . . . . . . . . 416.3 Propriétés de la transformée de Fourier . . . . . . . . . . . . . . . . . . . . 436.4 Transformée de Fourier dans L2(IR) . . . . . . . . . . . . . . . . . . . . . . 466.5 Transformée de Fourier des fonctions usuelles . . . . . . . . . . . . . . . . . 486.6 Autocorrélation temporelle et Fourier . . . . . . . . . . . . . . . . . . . . . 48
7 Fonctions définies par une intégrale 517.1 Motivations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 517.2 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51

Chapitre 1
Intégration
Ce chapitre contient un rappel des méthodes d’intégration, une présentation des intégralesgénéralisées, et les propriétés élémentaires des intégrales doubles.
1.1 Méthodes d’intégration : rappels
1.1.1 Utilisation de la linéarité
1. transformation de produits en sommes(par exemple à l’aide de formules de trigonométrie)
2. décomposition des fractions rationnelles en sommes de fonctions simples
1.1.2 Changement de variables
Si on pose x = ϕ(t) où ϕ est une fonction définie sur [α, β], telle que ϕ(α) = a et ϕ(β) = bet dérivable et bijective de [α, β] sur [a, b] alors on a∫ b
a
f(x) dx =
∫ β
α
f(ϕ(t)) ϕ′(t) dt avec α = ϕ−1(a) et β = ϕ−1(b) (1.1)
1.1.3 Intégration par parties
Formule qui découle de la formule bien connue de dérivation d’un produit :
(uv)′ = u′v + u v′
Elle peut s’écrire :∫ b
a
u(x) v′(x) dx = [u(x) v(x) ]ba −∫ b
a
u′(x) v(x) dx
3

4 Analyse
La notation différentielle du = u′(x)dx et dv = v′(x)dx permet une écriture plussynthétique pour les primitives : ∫
udv = uv −∫vdu
L’intégration par parties s’utilise dans des cas bien spécifiques :
1. Pour intégrer le produit d’un polynôme par une exponentielle, par un cosinus, oupar un sinus.On pose alors u(x) = P (x) pour avoir de proche en proche des polynômes de degréde plus en plus petit dans l’intégrale à calculer, jusqu’à obtenir un polynôme dedegré zéro donc constant.
2. Pour se débarrasser des fonctions transcendantes qui ont des dérivées de typefractions rationnelles comme ln(x), tan(x), et plus généralement ln(F (x)) où Fest une fraction rationnelle etc ..On pose alors u(x) = f(x) où f est la fonction transcendante.
1.2 Généralisation de la notion d’intégrale
1.2.1 Introduction
On sait que si la fonction f est continue sur l’intervalle fermé borné [a, b] alors elle estbornée sur [a, b] et de plus
∫ baf(x) dx est définie (définie signifiant que si a, b sont des
nombres connus et si f est connue alors∫ baf(x) dx est un nombre fini). On peut encore
définir∫ baf(x) dx si la fonction f est continue par morceaux et si elle reste bornée sur
l’intervalle [a, b] borné.Par contre si l’intervalle d’intégration est non borné ( ] −∞, b], [a,+∞[ , ] −∞,+∞[ )ou si la fonction est non bornée sur l’intervalle , l’intégrale est parfois définie et parfoiselle ne l’est pas :∫ +∞
0
dx
1 + x2= [arctanx]+∞0 =
π
2− 0 =
π
2définie (1.2)∫ +∞
1
dx
x= [ln |x|]+∞1 = +∞− 0 pas définie (1.3)∫ 1
0
dx
x= [ln |x|]10 = 0− (−∞) = +∞ pas définie (1.4)
Dans ce chapitre on va essayer de préciser des règles pour savoir a priori, sans calculer deprimitive, dans quel cas on se trouve.

Intégration 5
1.2.2 Intégrale généralisée : cas d’un domaine non borné
Définition 1.1 Soit f une fonction définie et continue sur [a,+∞[ ,on dit que l’intégrale∫ +∞a
f(x) dx converge au voisinage de +∞ ssi la limite de∫ Xaf(x) dx existe et est finie
lorsque X → +∞.
Bien sur il y a une définition similaire dans le cas où a = −∞.
Exemple 1 : ∫ X
0
cos(x) dx = [sin(x)]X0 = sinX − 0
Cette quantité n’a pas de limite quand X tend vers 0 , d’où la divergente de l’intégrale∫ +∞
0
cos(x) dx
Exemple 2 : La convergence de l’intégrale∫ +∞
0exp(ax) dx dépend de a . En effet
Si a 6= 0 ,∫ X
0
exp(ax) dx =
[exp(ax)
a
]X0
=1
a(exp(aX)− 1)
Or eaX tend vers l’infini si a > 0 et vers 0 si a < 0 .De plus si a = 0 , on a
∫ X0
dx = X →X→+∞
+∞ , donc
∫ +∞
0
exp(ax) dx diverge pour a ≥ 0∫ +∞
0
exp(ax) dx converge et vaut−1
apour a < 0
Exemple fondamental :∫ +∞
1
dx
xα
D’après (1.3) l’intégrale diverge pour α = 1 . Pour α 6= 1 une primitive est F (X) = X−α+1
−α+1
or si α > 1 alors X−α+1 →X→+∞
0 et si α < 1 alors X−α+1 →X→+∞
+∞ . On a donc
∫ +∞
1
dx
xαconverge ssi α > 1 (1.5)
diverge ssi α ≤ 1
Théorème de comparaison : Soient f et g deux fonctions positives telles que pour toutx ∈ [a,+∞[ , 0 ≤ f(x) ≤ g(x) alors :

6 Analyse
- si∫ +∞a
f(x) dx diverge alors∫ +∞a
g(x) dx diverge aussi.- si
∫ +∞a
g(x) dx converge alors∫ +∞a
f(x) dx converge aussi.
Pour lever une indétermination il est commode d’utiliser la notion de fonctions équiva-lentes pour comparer le comportement de deux fonctions aux voisinage d’un point.
Définition 1.2 f et g sont deux fonctions équivalentes au voisinage de a (a fini
ou infini) si f(x) ∼ag(x) ⇐⇒ lim
x→a
f(x)
g(x)= 1
Proposition 1.1 Soient deux fonctions f et g continues sur [a,+∞[ et équivalentesau voisinage de +∞, alors∫ +∞
a
f(x) dx et∫ +∞
a
g(x) dx sont de même nature
Théorème 1.1 Critère de Riemann.Soit f une fonction continue sur [a,+∞[ :
f(x) ∼+∞
cste
xαalors l’intégrale
∫ +∞
a
f(x) dx converge ssi α > 1
Quand on peut l’utiliser, ce critère permet d’éviter de calculer inutilement une primitivedans le cas où une intégrale généralisée diverge.
Parfois ce critère n’est pas utilisable et dans ce cas on utilise soit la définition, soit unemajoration ( si l’on veut prouver la convergence de l’intégrale) ou une minoration (dansle cas contraire).
1.2.3 Intégrale généralisée : cas d’une fonction non bornée
Définition 1.3 Soit une fonction f définie et continue sur ]a, b] et telle que f(x) →x→a
+∞
, alors on dit que l’intégrale∫ baf(x) dx converge au voisinage de a ssi la limite de∫ b
a+εf(x) dx existe et est finie lorsque ε→ 0
Exemple fondamental en a :∫ b
a
dx
(x− a)α
Comme en (1.4), la primitive est en logarithme et l’intégrale diverge pour α = 1. Pourα 6= 1 , la fonction n’est pas définie pour x = a et la primitive est F (X) = (X−a)−α+1
−α+1 orsi α > 1 alors (X − a)−α+1 →
X→a+∞ et si α < 1 alors (X − a)−α+1 →
X→a0 . Donc on a :∫ b
a
dx
(x− a)αconverge ssi α < 1 (1.6)
diverge ssi α ≥ 1

Intégration 7
Proposition 1.2 Comparaison : Soient 2 fonctions f et g continues sur ]a, b] alors
si ∀x ∈]a, b] on a 0 ≤ f(x) ≤ g(x) alors 0 ≤∫ b
a
f(x) dx ≤∫ b
a
g(x) dx.
Théorème 1.2 Critère de Riemann.Soit f une fonction continue sur ]a, b] avec b fini
f(x) ∼a
cste
(x− a)αalors l’intégrale
∫ b
a
f(x) dx converge ssi α < 1
Attention : On ne peux pas écrire yα pour y < 0 , car si α est non entier on ne peux pasdire que cela signifie le produit de y par lui même α fois ! Pour un réel quelconque α, ondéfini yα par :
yα = exp(α ln y)
Il faut donc impérativement que y soit positif ( ou éventuellement nul).Donc pour a < x < b on ne peut pas écrire (x− b)α mais plutôt (b− x)α . En suivant lamême démarche que ci-dessus on vérifie que :∫ b
a
dx
(b− x)αconverge ssi α < 1 (1.7)
diverge ssi α ≥ 1
Théorème 1.3 Critère de Riemann.Soit f une fonction continue sur [a, b[ avec a fini
f(x) ∼b
cste
(b− x)αalors l’intégrale
∫ b
a
f(x) dx converge ssi α < 1
Exemple 1 : Convergence de∫ +∞
0
f(x) dx avec f(x) =2x
(x+ 2)(x2 + 2x+ 2).
La fonction f est définie et continue sur IR \{−2} donc sur [0,+∞[ . On a
f(x) ∼+∞
2
x2
A priori l’intégrale converge. Une primitive est F (x) = ln(x2 + 2x + 2) − 2 ln |x+ 2|, àl’infini ceci donne une forme indéterminée +∞−∞ . Appliquons la définition en essayantde lever cette indétermination∫ X
0
f(x) dx = F (X)− F (0) = ln
∣∣∣∣X2 + 2X + 2
(X + 2)2
∣∣∣∣− (ln 2− 2 ln 2)
or F (X) ∼+∞
ln∣∣∣X2
X2
∣∣∣ →X→+∞
ln 1 = 0 donc∫ +∞
0f(x) dx converge et vaut ln 2.

8 Analyse
S’il n’y a pas de fonction équivalente mais si f est positive alors F (X) =∫ Xaf(x) dx est
une croissante de X. On peut alors utiliser une majoration pour montrer la convergencede l’intégrale ou une minoration par une intégrale divergente pour montrer la divergencegrâce à la proposition suivante.Exemple 2 :
∫ +∞0
exp(−x2) dx
Sur [1,+∞[ on a 0 ≤ x ≤ x2 donc −x2 ≤ −x et 0 ≤ x ≤ x2 donc 0 ≤∫ +∞
1exp(−x2) dx ≤∫ +∞
1exp(−x) dx = [− exp(−x)]+∞1 = 1
edonc
∫ +∞0
exp(−x2) dx =∫ 1
0exp(−x2) dx +∫ +∞
1exp(−x2) dx converge car sur [0, 1] la fonction est continue et sur [1,+∞[ grace à la
majoration on a la convergence.Si f n’est pas positive ou de signe constant, pour montrer la convergence de l’intégrale,on essaye de majorer |f(x)| et on utilise le théorème suivant.
Théorème 1.4 Convergence absolue∫ ba|f(x)| dx converge =⇒
∫ baf(x)dx converge absoluement donc converge
Démonstration. Si f+ est la partie positive de f et f− l’opposé de la partie négativealors |f | = f+ + f− et f = f+ − f− et la proposition ci-dessus entraine que
∫ baf+(x) dx
et∫ baf−(x) dx convergent, ce qui entraine que
∫ baf(x) dx =
∫ baf+(x) dx −
∫ baf−(x) dx
converge aussi
Exemple :∫ +∞
0
sinx√x(1 + x)
dx . Le domaine de f est ]0,+∞[ .
Il y a 2 problèmes : la fonction n’est pas définie en 0 et le domaine est non borné.
On a∫ +∞
0
=
∫ 1
0
+
∫ +∞
1
.
Pour x→ 0 la fonction est prolongeable par continuité et reste bornée carsinx√x(1 + x)
∼0
x√x→x→0
0 donc∫ 1
0
sinx√x(1 + x)
dx est définie.
Commesinx√x(1 + x)
ne garde pas un signe constant quand x→ +∞, on cherche à majorer
la valeur absolue sur [1,+∞[.∣∣∣∣ sinx√x(1 + x)
∣∣∣∣ ≤ 1√x(1 + x)
≤ 1
x3/2
comme α = 3/2 > 1, on en déduit que l’intégrale∫ +∞
0|f(x)| dx converge et donc∫ +∞
0f(x) dx est absolument convergente.
1.3 Intégrales double ou tripleLes sections précédentes ne concernent que les intégrales d’une fonction d’une seulevariable réelle. Dans ce cours il sera, de temps en temps, nécessaire de considérer desintégrales portant sur des fonctions de plusieurs variables réelles.

Intégration 9
Commençons par un exemple.Soit f(x, y) la fonction nulle sur IR2 sauf pour (x, y) ∈ D = [a, b] × [c, d] ⊂ IR2 , avec fcontinue sur D , nous pouvons definir∫ ∫
D
f(x, y) dxdy =
∫ b
a
(∫ d
c
f(x, y) dy
)dx
On verifie que on trouve le même resultat en intégrant d’abord en x puis en y :∫ ∫D
f(x, y) dxdy =
∫ d
c
(∫ b
a
f(x, y) dx
)dy
Remarque 1.1 Si f(x, y) = u(x)v(y) alors∫ ∫D
f(x, y) dxdy ==
(∫ b
a
u(x)dx
)(∫ d
c
v(y) dy
)Dans le cas d’intégrales généralisées, on a le théorème suivant :
Théorème 1.5 de Fubini : Une fonction f(x, y) est sommable sur IR2 ssi |f(x, y)| estsommable sur IR2 et alors∫ ∫
IR2
f(x, y) dxdy =
∫IR
(∫IR
f(x, y) dx
)dy
=
∫IR
(∫IR
f(x, y) dy
)dx

10 Analyse

Chapitre 2
Les espaces L1(I) et L2(I)
L’ensemble des fonctions est muni d’une structure d’espace vectoriel (on peut additionnerdeux fonctions et on peut multiplier une fonction par un scalaire réel ou complexe).Pour pouvoir évaluer la précision d’une proximation d’une fonction (ou d’un signal) parune autre fonction, il faut disposer d’une notion de distance entre deux fonctions.En fait de nombreux choix sont possibles, mais nous ne présenterons ici que les 2 notionsles plus utiles en ce qui concerne les mathématiques pour l’ingénieur.
Dans la suite I désigne un intervalle, ce peut être IR, ]0,+∞[, ]a, b[ , il peut donc êtreborné ou non borné.Nous allons introduire pour les fonctions définies sur un intervalle I (borné ou non) deuxnormes différentes.
La première, assez naturelle, consiste à mesurer l’écart entre 2 fonctions f et g par l’airequi sépare leur courbe représentative. Si cette aire est nulle on dit que la norme est nulle.
La seconde norme considérée ici consiste à mesurer l’aire sous le carré de f − g. Elle estplus intéressante pour l’ingénieur car que ce soit en traitement du signal, en électricitéou en mécanique le carré de cette norme permet de calculer l’énergie d’un signal ou unepuissance électrique ou une énergie cinétique ou encore une énergie de déformation, etc .
2.1 Espace L1(I) des fonctions sommables sur I
On considère l’espace vectoriel sur IR des fonctions définies sur I et à valeurs réelles (Iborné ou non).
Définition 2.1 Une fonction est dite sommable sur I si et seulement si∫I
|f(x)| dx < +∞
11

12 Analyse
L’ensemble des fonctions sommables forme un sous espace vectoriel.
Si deux fonctions sommables f et g sont continues sur I alors∫I
|f(x)− g(x)| dx = 0⇒ ∀x ∈ I, f(x) = g(x).
Mais si f et g sont discontinues sur I , par exemple si ce sont 2 fonctions portes légèrementdifférentes :
f(x) =
{1 si − 1 ≤ x ≤ 1
0 sinon g(x) =
{1 si − 1 < x < 1
0 sinon
on voit que f(x)− g(x) = 0 sauf pour x = −1 ou pour x = 1 et que∫IR
|f(x)− g(x)| dx = 0.
cela signifie que si f et g sont seulement continues par morceaux, on peut seulement direque : ∫
I
|f(x)− g(x)| dx = 0⇒ f(x) = g(x) sauf pour x = −1 et x = 1
Les fonctions f et g sont donc égales sauf en ces points. On introduit la notion commodede "presque partout" notée pp.
Définition 2.2 Si deux fonctions sont égales sauf en un nombre finis de points ou mêmesur un ensemble dénombrable de points alors on dit que ces fonctions sont égales presquepartout.
On peut alors dire que :∫I
|f(x)− g(x)| dx = 0 ⇒ fpp= g
On peut alors définir une norme sur le sous espace vectoriel des fonctions sommables surI par :
‖f‖L1 =
∫I
|f(x)| dx
et on a la propriété‖f‖L1 = 0 ⇒ f
pp= 0
Définition 2.3 On note L1(I) l’ensemble des fonctions sommables sur I où on confondles fonctions égales presque partout. L1(I) est muni de la norme :
‖f‖L1 =
∫I
|f(x)| dx

Espaces L1 et L2 13
Ainsi on peut écrire que ‖f‖L1 = 0 ⇐⇒ fpp= 0 .
Remarque 2.1 Dans l’espace vectoriel des fonctions à valeurs complexes
‖f‖L1 =
∫I
|f(x)| dx
avec |f(x)| égal au module du nombre complexe f(x) .
2.2 Espace L2(I) des fonctionsde carré sommable sur I
On considère d’abord l’espace vectoriel sur IR des fonctions définies sur I et à valeursréelles.
Définition 2.4 Une fonction est dite de carré sommable sur I si et seulement si∫I
f(x)2 dx < +∞
Définition 2.5 On note L2(I) l’ensemble des fonctions de carré sommable sur I où onconfond les fonctions égales presque partout.L2(I) est muni du produit scalaire :
(f, g) =
∫I
f(x)g(x) dx
et de la norme correspondante : ‖f‖L2 =√∫
If(x)2 dx
L’espace L2(I) est plus intéressant que l’espace L1(I) pour 2 raisons :
1. la première d’ordre physique car souvent l’énergie dissipée sur un intervalle detemps I = [0, T ] peut s’exprimer comme l’intégrale du carré d’une fonction (énergieelectrique, énergie cinétique, etc ), et la textbfpuissance dissipée est définie par1T
∫ T0|f(x)|2 dx.
2. la seconde raison est d’ordre mathématique car l’existence d’un produit scalaireva permettre d’utiliser les notions bien connues de géométrie, comme la projectionorthogonale, pour trouver la meilleure approximation d’une fonction sous certainesconditions.
Comme on sera amené à considérer des fonctions à valeurs complexes, on utilisera unegénéralisation de la notion de produit scalaire, on définira dans ce cas le produit scalairegénéralisé (appelé aussi produit hermitien) (f, g) par :
(f, g) =
∫I
f(x)g(x) dx

14 Analyse
où g(x) représente la valeur complexe conjuguée de g(x).On vérifie bien alors la positivité du produit scalaire d’une fonction par elle même :
(f, f) =
∫I
f(x)f(x) dx =
∫I
|f(x)|2 dx
Remarque 2.2 Si f est continue, bornée et à support borné (c’est à dire nulle hors dece support) alors f ∈ L1(IR) ∩ L2(IR).Si I est un intervalle borné et si f est bornée et continue par morceaux sur I alorsf ∈ L1(I) ∩ L2(I).
Exemples : On peut vérifier que les fonctions e−|ax| ,1
x2 + 1, et la fonction gaussienne
e−x2 , sont dans L1(IR) ∩ L2(IR)
On peut aussi facilement montrer que la fonction sinus cardinalsin(x)
xappartient à L2(IR),
on montre aussi (plus difficilement !) quesin(x)
x/∈ L1(IR).
Le domaine de définition de f(x) =1√
|x|(x2 + 1)est IR∗. En appliquant le critère de
Riemann en 0, on montre que1√
|x|(x2 + 1)/∈ L2(IR) ( la fonction se comporte comme
1
|x|au voisinage de 0). Mais en appliquant le critère de Riemann en 0 et à l’infini, on
montre que f∈ L1(IR).
On a1√|x|
/∈ L1(IR) d’après le critère de Riemann à l’infini, mais sur l’intervalle borné
[−1, 1] on a1√|x|∈ L(−1, 1) .
2.3 Relation entre L1(I) et L2(I)
Si l’intervalle I est non borné, il n’y a pas de relation d’inclusion entre L1(I) et L2(I) ,comme le montre les exemples ci-dessus.Par contre dans le cas où l’intervalle I = [a, b] est borné, alors l’inégalité de Schwarz
permet de prouver que L2(a, b) est inclus dans L1(a, b).

Espaces L1 et L2 15
Inégalité de Schwarz
∣∣∣∣∫ b
a
f(x)g(x) dx
∣∣∣∣ ≤√∫ b
a
|f(x)|2 dx
√∫ b
a
|g(x)|2 dx (2.1)
Cette inégalité est seulement l’interprétation dans l’espace L2(a, b) de la propriété généraleconcernant les produits scalaires et les normes associées.Le produit scalaire de deux vecteurs est majoré en module par le produit des normes dechacun des vecteurs
|(f, g)| ≤ ‖f‖ ‖g‖
En choisissant pour g la fonction constante égale à 1 sur [a, b], et pour f une fonctionégale à son module, on obtient
∣∣∣∣∫ b
a
|f(x)| dx∣∣∣∣ ≤
√∫ b
a
|f(x)|2 dx√b− a
et donc si la fonction f est dans L2(a, b) elle est aussi forcément dans L1(a, b).
2.4 Compléments
L’intérêt des espaces vectoriels en dimension finie, c’est que, pour définir une transforma-tion linéaire, il suffit de la définir sur la base considérée. Mais l’ensemble des fonctions dela variable réelle x est de dimension infini (puisqu’il contient l’ensemble de toutes les fonc-tions polynômiales, etc ...). La dimension infinie complique la situation. Mais on montre
que l’espace L2(I) est ce qu’on appelle un espace de Hilbert séparable , c’est à direqu’il existe un ensemble infini mais dénombrable de fonctions en, n ∈ N , orthogonales2 à 2, et telles que toute fonction de l’espace soit une combinaison linéaire infinie uniquedes éléments de cette base :
f =∞∑n=1
anen avec an = (f, en)
Cette décomposition est unique et on a
∀n ∈ N an = 0⇐⇒ fpp= 0.
L’exemple le plus important en mathématiques du signal est la décomposition en sériede Fourier qui n’est rien d’autre que la décomposition d’une fonction de l’espace L2(0, T )

16 Analyse
par rapport à la base orthogonale formée par les fonctions
u0(x) = 1
u1(x) = cos(2π
Tx) v1(x) = sin(
2π
Tx)
.......
uk(x) = cos(k2π
Tx) vk(x) = sin(k
2π
Tx)
.......
Les séries de Fourier font l’objet de l’étude de chapitre suivant.
2.5 Rappels sur les espaces vectorielsUn des exemples les plus élémentaires d’espaces vectoriels est l’espace IR3 .Si −→e1 , −→e2 , −→e3 est une base de IR3 alors il existe un triplet de nombres réels (x, y, z) telque : −→
V = x −→e1 + y −→e2 + z−→e3 (2.2)
Les nombres x, y, z sont les composantes du vecteur−→V par rapport à la base (−→e1 ,
−→e2 ,−→e3 ).
Dans IR3 on définit un produit scalaire noté (−→V ,−→U ) et la norme associée, notée
∥∥∥−→V ∥∥∥ ,est définie par
∥∥∥−→V ∥∥∥2
= (−→V ,−→V ).
Si deux vecteurs ont un produit scalaire nul, ces vecteurs sont dits orthogonaux.Si un vecteur a une norme égale à 1 , on dit qu’il est normé.
Un sous espace vectoriel est un sous ensemble stable par l’addition des vecteurs et parla multiplication par un nombre réel.Pour trouver lameilleure approximation d’un vecteur par un vecteur appartenant à unsous espace vectoriel on projette orthogonalement le vecteur sur le sous espace vectoriel.Pour faire de la géométrie, on choisit une base orthonormée.Pour déterminer la composante x du vecteur
−→V par rapport à la base orthonormée
(−→e1 ,−→e2 ,−→e3 ), il suffit de faire le produit scalaire de
−→V par le vecteur −→e1 :
(−→V ,−→e1 ) = (x −→e1 + y −→e2 + z−→e3 ,
−→e1 )
= x (−→e1 ,−→e1 ) + y (−→e2 ,
−→e1 ) + z (−→e3 ,−→e1 ) linéarité du produit scalaire
= x+ 0 + 0 puisque la base est orthonormée
d’où x = (−→V ,−→e1 ) .
En faisant de même pour i = 2 et 3, on trouve les composantes du vecteur−→V par rapport
à la base orthonormée−→{e1 , −→e2 , −→e3} :
x = (−→V ,−→e1 ), y = (
−→V ,−→e2 ), z = (
−→V ,−→e3 ). (2.3)

Espaces L1 et L2 17
Si−→U est un vecteur de composantes (x′, y′, z′) dans la base {−→e1 ,
−→e2 ,−→e3} alors, en utilisant
la linéarité du produit scalaire et l’orthogonalité de la base, on obtient :
(−→V ,−→U ) = (x −→e1 + y −→e2 + z−→e3 , x
′ −→e1 + y′ −→e2 + z′−→e3 )
= (x −→e1 + y −→e2 + z−→e3 , x′ −→e1 ) + (x −→e1 + y −→e2 + z−→e3 , y
′ −→e2 )
+ (x −→e1 + y −→e2 + z−→e3 , z′ −→e3 )
= xx′ (−→e1 ,−→e1 ) + yy′ (−→e2 ,
−→e2 ) + zz′ (−→e3 ,−→e3 ) orthogonalité de la base
Si de plus la base est normée, le produit scalaire est égal à :
(−→V ,−→U ) = xx′ + yy′ + zz′ (2.4)
Et donc la norme au carré de−→V s’exprime en fonction de ses composantes par :∥∥∥−→V ∥∥∥2
= (−→V ,−→V ) = x2 + y2 + z2 (2.5)
Si la base est seulement orthogonale sans être normée, on a alors :
(−→V ,−→e1 ) = x (−→e1 ,
−→e1 ) + y (−→e2 ,−→e1 ) + z (−→e3 ,
−→e1 ) = x ‖−→e1‖2
+ 0 + 0
Donc :
x =(−→V ,−→e1 )
‖−→e1‖2 , y =
(−→V ,−→e2 )
‖−→e2‖2 , z =
(−→V ,−→e3 )
‖−→e3‖2 . (2.6)
et ∥∥∥−→V ∥∥∥2
= (−→V ,−→V ) = x2 ‖−→e1‖
2+ y2 ‖−→e2‖
2+ z2 ‖−→e3‖
2 (2.7)
Pour que l’expression de la norme en fonction des composantes soit simple, il est essentielque la base soit au moins orthogonale.
Ces propriétés bien connues dans l’espace IR3, peuvent être étendues à des espacesvectoriels plus généraux.
Pour pouvoir parler d’espace vectoriel il faut avoir un ensemble d’éléments que l’on peutadditionner et que l’on peut multiplier par un nombre (ici réel ou complexe) . Un élémentde l’espace vectoriel est appelé vecteur par opposition au mot scalaire qui désigne unnombre de IR ou C .
Exemples :
1. L’ensemble des fonctions réelles de la variable réelle x forme un espace vectoriel surIR car on peut additionner 2 fonctions et on peut multiplier une fonction par unnombre réel et ces 2 opérations vérifient les propriétés qui donnent à l’ensemble unestructure d’espace vectoriel sur IR .
2. De même l’ensemble des fonctions à valeurs complexes de la variable réelle x formeun espace vectoriel sur C .

18 Analyse
3. L’ensemble des fonctions polynômiales de degré n forment un sous espace vectoriel.4. Les matrices à m lignes et n colonnes forment un espace vectoriel sur C .
Les notions bien connues dans IR3 de norme de vecteur et de produit scalaire de 2 vecteurss’étendent aux espaces vectoriels abstraits.Comme les espaces vectoriels qui vont nous intéresser dans ce cours sont des espaces dontles vecteurs sont des fonctions. Nous noterons f ou g deux élements quelconque d’unespace vectoriel E .
Définition 2.6 Une norme sur un espace vectoriel E réel ou complexe (i.e. les scalairessont dans IR ou C) est une application de E dans IR+
f → ‖f‖
telle que :
‖f‖ = 0⇐⇒ f = 0 (2.8)‖λf‖ = |λ| ‖f‖ λ ∈ K (2.9)
‖f + g‖ ≤ ‖f‖+ ‖g‖ (2.10)
Définition 2.7 Un produit scalaire dans un espace vectoriel E réel est une applicationde E × E dans l’ensemble des scalaires IR. (d’où le nom !) Si on note (f, g) le produitscalaire de f et g, on doit avoir :
(f, g) = (g, f) symétrie (2.11)(λf + µg, h) = λ(f, h) + µ(g, h) linéarité (2.12)
(f, f) ≥ 0 positivité (2.13)(f, f) = 0⇐⇒ f = 0 (2.14)
Remarque 2.3 Connaissant le produit scalaire, la norme associée est définie par ‖f‖ =√(f, f) .

Chapitre 3
Les séries de Fourier
3.1 Introduction et rappelsL’idée fondamentale de Leonhard Euler (1707-1783) , utilisée avec brio par Joseph Fourier(1768-1830) pour résoudre le problème de la diffusion de la chaleur, a été de décomposertoute fonction périodique en une somme infinie d’harmoniques. Une série trigonométriqueS(x) s’écrit formellement :
S(x) = a0 + a1 cos(2πx
T) + b1 sin(
2πx
T) + ...+ an cos(
n2πx
T) + bn sin(
n2πx
T) + ...
= a0 +∑n∈N∗
(an cos(
n2πx
T) + bn sin(
n2πx
T)
)Les coefficients an et bn sont des nombres réels et T est un nombre réel positif, quireprésente la période de la somme S(x), si cette somme est définie. Cette série admetune formulation complexe équivalente :
S(x) =∑n∈Z
cn exp(in2πx
T)
avec
c0 = a0 et pour n ∈ N∗ cn =an − ibn
2et c−n =
an + ibn2
Une série trigonométrique quelconque ne converge pas nécessairement vers une fonction.Les séries trigonométriques ont la particularité de pouvoir converger vers des fonctionsdiscontinues (ce qui n’est pas le cas pour les séries entières).Une fonction de période T est parfaitement définie par son comportement sur un intervallede longueur T .En traitement du signal
1. l’énergie totale sur un intervalle [0, T ] est , à une constante près,∫ T
0|f(t)|2 dt
2. la puissance d’un signal périodique est 1T
∫ T0|f(t)|2 dt.
19

20 Analyse
Ces deux notions font intervenir la norme dans L2(0, T ). Si on considère la somme de 2signaux f et g alors l’énergie de la somme est
‖f + g‖2 = (f + g, f + g) = ‖f‖2 + 2 (f, g) + ‖g‖2 .
Pour que l’énergie de la somme soit la somme des énergies, il faut que le produit scalaire(f, g) soit nul, donc que les signaux f et g soient orthogonaux.
L’importance des séries trigonométrique provient de ce que les fonctions
1, cos(2πx
T), sin(
2πx
T), ... , cos(
n2πx
T), sin(
n2πx
T), ...
sont 2 à 2 orthogonales et que, de plus, elles forment une base de l’espace L2(0, T ).
3.2 Série de Fourier trigonométriqueL’ensemble des fonctions à valeurs réelles définies sur un intervalle [0, T ] et de carrésommable forme un espace vectoriel sur IR . Si on convient de confondre les fonctions quisont égales presque partout, alors on peut munir cet espace, noté L2(0, T ), d’une normedéfinie par :
‖f‖L2(0,T ) =
√∫ T
0
f(x)2 dx
et d’un produit scalaire :
(f, g) =
∫ T
0
f(x)g(x) dx
Théorème 3.1 Les fonctions 1, cos(2πxT
), sin(2πxT
), ..., cos(n2πxT
), sin(n2πxT
) , ... formentune base orthogonale de l’espace de Hilbert L2(0, T ) . C’est-à-dire que toute fonction decarré sommable sur [0,T], peut s’écrire comme une combinaison linéaire infinie de cesfonctions de base :
f(x)pp= a0 + a1 cos(
2πx
T) + b1 sin(
2πx
T) + ...+ an cos(
n2πx
T) + bn sin(
n2πx
T) + ...
L’égalité n’a lieu que presque partout puisque c’est une égalité dans L2(0, T ).On peut aisément vérifier que les fonctions 1, cos(2πx
T), sin(2πx
T), ..., cos(n2πx
T), sin(n2πx
T) ,
... sont deux à deux orthogonales.On peut démontrer, et nous l’admettrons, que ces fonctions forment ce qu’on appelle unebase de l’espace L2(0, T ) .Les coefficients de la série de Fourier Sf de la fonction f dépendent bien sûr de f . Pourles définir, on utilise les propriétés vues au chapitre 1.
Théorème 3.2 Les coefficients de la série de Fourier Sf de la fonction f sont définispar :

Séries de Fourier 21
a0 =1
T
∫ T
0
f(x) dx (3.1)
an =2
T
∫ T
0
f(x) cos(n2πx
T) dx et bn =
2
T
∫ T
0
f(x) sin(n2πx
T) dx (3.2)
Et on a l’identité de Parseval :∫ T
0
|f(t)|2 dt = ‖f‖2L2(0,T ) = T
(a2
0 +1
2
∞∑n=1
(a2n + b2
n
))(3.3)
Démonstration : La base ci-dessus est orthogonale mais pas normée. En introduisant lapulsation ω = 2π
Ton a :
‖1‖2L2(0,T ) = T , ‖cos(nωx)‖2
L2(0,T ) = ‖sin(nωx)‖2L2(0,T ) =
T
2
Grâce à l’orthogonalité de la base, on déduit que :
a0 =(f, 1)
(1, 1), an =
(f, cos(nωx))
‖cos(nωx)‖2L2
, an =(f, sin(nωx))
‖sin(nωx)‖2L2
.
En utilisant (3.2) on obtient les formules donnant les coefficients de la série de Fourier def (3.1), (3.2).La généralisation de la formule de Pythagore donne :
‖f‖2L2(0,T ) = a2
0 ‖1‖2L2 +
∞∑n=1
(a2n ‖cos(nωx)‖2
L2 + b2n ‖sin(nωx)‖2
L2
)ce qui entraîne l’identité de Parseval (3.3).
Cette identité de Parseval exprime que l’énergie totale sur une période est égale à lasomme des énergies de chaque harmonique ou que la puissance est la sommedes puissances de chaque harmonique :
1
T
∫ T
0
|f(t)|2 dt = a20 +
1
2
∞∑n=1
(a2n + b2
n
)
3.3 Série de Fourier complexeL’ensemble des fonctions à valeurs complexes, définies sur un intervalle [0, T ] et de moduleau carré sommable forme un espace vectoriel sur C . Si on convient de confondre les

22 Analyse
fonctions qui sont égales presque partout, alors on peut munir cet espace, noté L2(0, T ),d’une norme définie par :
‖f‖L2(0,T ) =
√∫ T
0
|f(x)|2 dx
et d’un produit scalaire généralisé :
(f, g) =
∫ T
0
f(x)g(x) dx
Théorème 3.3 Les fonctions exponentielles complexes exp(inωx), où n ∈ Z et où ω = 2πT
est la pulsation, forment une base orthogonale de l’espace de Hilbert L2(0, T ) sur C. C’est-à-dire que toute fonction de module au carré sommable sur [0,T], peut s’écrire comme unecombinaison linéaire infinie de ces fonctions de base :
f(x)pp=∑n∈Z
cn exp(in2πx
T) .
Encore un fois l’égalité n’a lieu que presque partout puisque c’est une égalité dans L2(0, T ).On peut aisément vérifier que les fonctions exp(inωx) où n ∈ Z sont deux à deuxorthogonales dans L2(0, T ).On peut démontrer, et nous l’admettrons encore, que ces fonctions forment une base del’espace L2(0, T ) sur C.
Théorème 3.4 Les coefficients de la série de Fourier complexe Sf de la fonction f sontdéfinis par :
cn =1
T
∫ T
0
f(x) exp(−in2πx
T) dx
Et on a l’identité de Parseval :∫ T
0
|f(t)|2 dt = ‖f‖2L2(0,T ) = T
∞∑n=−∞
|cn|2 (3.4)
Démonstration : La base ci-dessus est orthogonale mais pas normée. On a :
‖exp(inωx)‖2L2(0,T ) =
∫ T
0
|exp(inωx)|2 dx =
∫ T
0
1 dx = T
Grâce à l’orthogonalité de la base, on déduit que :
cn =(f, exp(inωx))∥∥exp( in2πx
T)∥∥2
L2
=1
T
∫ T
0
f(x)exp(inωx) dx1
T=
∫ T
0
f(x) exp(−inωx) dx

Séries de Fourier 23
D’où les formules donnant les coefficients de la série de Fourier de f .L’identité de Parseval (3.4) signifie que le carré de la norme du vecteur f est au coefficientT près la somme des carrés des modules des composantes cn de ce vecteur :
‖f‖2L2(0,T ) = T
∞∑n=−∞
cncn = T∞∑
n=−∞
|cn|2
3.4 Convergence des sommes partielles de la série deFourier dans L2(0, T )
Soit f une fonction de L2(0, T ) .
Définition 3.1 La somme de la valeur moyenne et des harmoniques d’ordre inférieur ouégal à n, s’appelle la somme partielle d’ordre n de la série de Fourier Sf de f et se noteSn :
Sn(x) = a0 + a1 cos(2πx
T) + b1 sin(
2πx
T) + ...+ an cos(
n2πx
T) + bn sin(
n2πx
T).
Remarque 3.1 Cette somme partielle peut aussi s’exprimer à l’aide des cn :
Sn(x) =k=n∑k=−n
ck exp(ik2πx
T).
Théorème 3.5 Les sommes partielles Sn convergent au sens de la norme L2(0, T ) versla fonction f c’est à dire que :
‖Sn − f‖L2 →n→∞
0
De plus on peut calculer l’erreur commise en approximant f par Sn car on a :
‖Sn − f‖2L2 = ‖f‖2
L2 − ‖Sn‖2L2
Lorsque n→∞ le rapport de l’énergie du signal approché sur l’énergie du signal initial f, tend vers 100% :
‖Sn‖2L2
‖f‖2L2
→n→∞
100%
Démonstration : Comme les fonctions Sn − f et Sn sont orthogonales et que l’on af = (f − Sn) + Sn, on en déduit par Pythagore que :
‖f‖2L2 = ‖Sn − f‖2
L2 + ‖Sn‖2L2

24 Analyse
3.5 Convergence ponctuelle des sommespartielles de la série de Fourier
Théorème 3.6 (de Dirichlet) Soit f une fonction continue et dérivable par morceauxsur [0, T ], telle qu’en tout point de discontinuité x0 il y aît une limite finie à gauchef(x−0 ) et une limite finie à droite f(x+
0 ), alors la suite de fonctions formée par les sommespartielles Sn(x) converge ponctuellement sur [0, T ] et on a :
Sn(x) →n→∞
Sf (x) = f(x) pour tout x où f est continue
Sn(x0) →n→∞
Sf (x0) =f(x−0 ) + f(x+
0 )
2pour tout x0 où f est discontinue
La suite des sommes partielles Sn(x) converge presque partout vers la fonction f(x) .
Remarque 3.2 Il est clair que sous les hypothèses du théorème ci-dessus la fonction fest aussi une fonction de L2(0, T ) .
3.6 Dérivation terme à termeThéorème 3.7 Si la série de Fourier Sf de f est absolument convergente, c-à-d si :
|a0|+∞∑n=1
(|an|+ |bn|) <∞
ousi∞∑
n=−∞
|cn| <∞
alors on peut dériver cette série terme à terme et la série dérivée converge presque partoutvers la fonction dérivée f ′.
3.7 Vérification des résultats, erreurs usuellesTout d’abord, il est important de noter que si une fonction g est périodique de période T ,son intégrale sur [0, T ] est égale à son intégrale sur n’importe quel intervalle de longueurT :
∀α∫ T
0
g(x) dx =
∫ α+T
α
g(x) dx
En particulier si f est de période T et paire (resp. impaire) alors il sera judicieux d’intégrersur [−T
2, T
2] pour calculer ses coefficients de Fourier plutôt que sur [0, T ]. Il est alors facile

Séries de Fourier 25
de vérifier que :
si f est paire, alors bn = 0 pour n ≥ 1
si f est impaire, alors an = 0 pour n ≥ 0
Il est facile de vérifier sur un graphe que les valeurs calculées sont raisonnables.- a0 doit être le valeur moyenne de la fonction- la parité de la série doit être celle de la fonction- si T est la période alors ω = 2π
T.
Les erreurs les plus usuelles sont les suivantes :- si en intégrant on doit, par exemple, diviser par n−1, (resp. n−k ), alors il faut traiter
à part le cas n = 1 (resp. n = k ).- si par exemple la fonction est définie par f(x) = x3 pour x ∈ [0, T/2], et est paire et
de période T , alors il est faux d’écrire :
an =2
T
∫ T
0
x3 cos(n2πx
T) dx
car la fonction n’est plus égale à x3 sur [T/2, T ] . Il faut utiliser la périodicité etintégrer sur [−T/2, T/2] , puis utiliser la parité de f et du cosinus.
- il est faux ensuite de dire que la série de Fourier converge pp vers x3 .En fait, elle ne converge vers x3 que sur [0, T/2[, sur ]−T/2, 0] c’est vers −x3 et sur]T/2, T ] c’est vers −(x− T )3 .
3.8 Remarques généralesToute fonction f définie sur un intervalle borné peut être prolongée sur IR par une fonctionpériodique f , mais il y a une infinité de façon de faire ce prolongement. Dans le cas d’unefonction définie sur [0, a] , on peut par exemple :
- la prolonger par périodicité de période T = a
- la rendre paire puis la prolonger par périodicité de période T = 2a
- la rendre impaire puis la prolonger par périodicité de période T = 2a
Il y a bien d’autres choix possibles. Mais il est important de noter que si on veut quela somme partielle converge le plus rapidement possible vers f , il vaut mieux, si on lepeut, choisir le prolongement sur IR qui est le plus régulier (c’est-à-dire continu et le plusdérivable possible sur IR ).
La question qui se pose naturellement est de savoir si on ne pourrait pas obtenir un outilsimilaire à la décomposition en série de Fourier pour des fonctions définie sur IR et nonpériodiques. L’outil correspondant est la transformation de Fourier.

26 Analyse

Chapitre 4
Le produit de convolution
4.1 Définitions
Le produit de convolution de deux fonctions f et g , est une fonction notée h =f ∗ g avec
h(x) =∫ +∞−∞ f(y)g(x− y) dy (4.1)
Le produit de convolution n’est défini que si cette intégrale généralisée est convergente.L’intégrale ci-dessus fait intervenir 2 variables : la variable d’intégration ou variable muette(ici y ) et une autre qui permet de décrire la fonction h produit de convolution des 2fonctions f et g.
Une fonction est dite causale si elle est définie sur [0,∞[ et prolongée par 0 sur ]−∞, 0[.
Si les fonctions f et g sont causales alors (4.1) peut être simplifié.Comme f et g sont nulles sur ]−∞, 0[, on a f(y) = 0 sur ]−∞, 0[ et g(x− y) = 0 pourx− y < 0. Ici il est très important de comprendre que l’on veut calculer la valeur de h enx et donc x est imposé, par contre ici la variable d’intégration (muette) est y et elle doitparcourir IR . Donc on a g(x− y) = 0 pour x < y c.a.d. pour y ∈]x,+∞[ .Si x ≤ 0, comme l’intégrale porte sur les y > 0, on a x ≤ 0 < y donc g(x − y) = 0 eth(x) = 0 .
h(x) =
∫ +∞
−∞f(y)g(x− y) dy = 0 +
∫ +∞
0
f(y)g(x− y) dy
Si x > 0 , on peut écrire
h(x) =
∫ 0
−∞f(y)g(x− y) dy +
∫ x
0
f(y)g(x− y) dy +
∫ +∞
x
f(y)g(x− y) dy
= 0 +
∫ x
0
f(y)g(x− y) dy + 0
27

28 Analyse
Proposition 4.1 Si les fonctions f et g sont causales alors le produit de convolution h =f ∗ g est aussi causal et il est défini par :
si x > 0 h(x) =∫ x
0f(y)g(x− y) dy
si x ≤ 0 h(x) = 0
(4.2)
4.2 Propriétés du produit de convolutionProposition 4.2 Le produit de convolution est commutatif :
f ∗ g = g ∗ f (4.3)
Démonstration. En faisant dans (4.1) le changement de variable z = x− y où x estun paramètre fixé, on obtient dz = −dy et donc :
(f ∗ g)(x) =
∫ +∞
−∞f(y)g(x− y) dy =
∫ −∞+∞
f(x− z)g(z) (−dz)
or d’après la définition du produit de convolution (4.1) ceci est bien le produit deconvolution g ∗ f :
(g ∗ f)(x) =
∫ +∞
−∞g(z)f(x− z) dz
Proposition 4.3 Si f et g ont même parité alors la fonction f ∗ g est paire.Si f et g ont des parités différentes alors la fonction f ∗ g est impaire.
Démonstration. Selon que, pour tout x, f(−x) = f(x) ou que f(−x) = −f(x) ondit que f est paire ou impaire.Pour étudier la parité du produit de convolution, calculons (f ∗ g)(−x) ,
(f ∗ g)(−x) =
∫ +∞
−∞f(y)g(−x− y) dy
si f et g ont même parité, on a f(y)g(−x− y) = f(−y)g(x+ y), or en posant z = −y :∫ +∞
−∞f(−y)g(x+ y) dy =
∫ −∞+∞
f(z)g(x− z) (−dz)
Comme z est une variable muette, cette dernière intégrale vaut (f ∗ g)(x) .Si f et g ont des parités différentes alors on a f(y)g(−x− y) = −f(−y)g(x+ y)On obtient alors (f ∗ g)(−x) = −(f ∗ g)(x) .

Le produit de convolution 29
Proposition 4.4 Si f est nulle en dehors de [a, b] et si g est nulle en dehors de [c, d] ,alors f ∗ g est nulle en dehors de [a+ c, b+ d] .
Démonstration. Montrons que si x /∈ [a + c, b + d] alors en ce point (f ∗ g)(x) =∫ +∞−∞ f(y)g(x − y) dy est nul. En fait il suffit de vérifier que pour un x de ce type leproduit f(y)g(x− y) est nul quelle que soit la valeur de y .a) si y /∈ [a, b] , f(y) = 0 car f est nulle en dehors de [a, b] ,b) si y ∈ [a, b], il suffit de voir si g(x− y) est nulle quand x /∈ [a+ c, b+ d]. Par hypothèseg(x − y) est nulle si (x − y) n’est pas dans [c, d] c’est à dire si x /∈ [y + c, y + d] maiscomme y ∈ [a, b] , si on a x /∈ [a+ c, b+ d] alors on a forcément x /∈ [y + c, y + d] et doncg(x− y) = 0.
Corollaire 4.1 Si f et g sont nulles hors de IR+ alors f ∗ g est aussi nulle hors de IR+.
L’ensemble des y tels que f(y) 6= 0 permet de définir le support de la fonction f(c’est le plus petit fermée de IR contenant ces y tels que f(y) 6= 0).
4.3 Le produit de convolution régulariseDéfinition 4.1 La fonction f est dite de classe Cn sur IR si elle appartient à Cn(IR)c.à d. si f est n fois dérivable et si la dérivée nieme, notée f (n), est continue sur IR.
Une fonction de classe Cn+1 est plus régulière qu’une fonction de classe Cn.
Proposition 4.5 Si f est continue, bornée sur IR , et si g est dans L1(IR) alors f ∗ g estcontinue sur IRSi de plus la dérivée f ′ existe sur IR tout entier et est bornée alors f ∗ g est dérivablesur IR tout entier et :
(f ∗ g)′ = f ′ ∗ g (4.4)
Démonstration. On est dans le cadre d’application du théorème de convergencedominée vu dans le chapitre précédant. En effet
(f ∗ g)(x) =
∫ +∞
−∞f(x− y)g(y) dy
et puisque f est bornée, on a la majoration :
|f(x− y)g(y)| ≤M |g(y)|
or g est sommable donc le théorème s’applique. Si f est continue, f(x−y)g(y) est continuepar rapport à x et donc l’intégrale aussi.Même démarche pour la dérivation. La dérivée de f(x − y)g(y) par rapport à x estf ′(x− y)g(y) donc comme
|f ′(x− y)g(y)| ≤ N |g(y)|

30 Analyse
et que g est dans L1(IR), on en déduit que
∀x ∈ IR (f ∗ g)′(x) =
∫ +∞
−∞f ′(x− y)g(y) dy = (f ′ ∗ g)(x)
Attention si les hypothèses de la proposition ne sont pas vérifiées.
Exemple : Produit de convolution d’une fonction porte par elle même : h = P1 ∗ P1
h(x) =
∫ +∞
−∞P1(y)P1(x− y) dy =
∫ +1/2
−1/2
1.P1(x− y) dy
Or P1(x − y) = 1 ssi x − y ∈ [−1/2, 1/2] c’est à dire −1/2 ≤ x − y ≤ 1/2 ou encorex− 1/2 ≤ y ≤ x+ 1/2et P1(y) = 1 ssi y ∈ [−1/2, 1/2]donc le produit vaut 1 ssi y ∈ [−1/2, 1/2]∩ [x− 1/2, x+ 1/2] et zéro sinon.Toute la question est d’étudier l’intersection de ces 2 intervalles selon la valeur donnée àla variable x où on veut calculer la fonction produit de convolution.Il y a en général 5 cas : l’intervalle mobile peut être soit à gauche de l’intervalle fixe, soit àgauche mais avec une intersection, soit l’un des intervalle contient l’autre, soit l’intervallemobile a une intersection avec le fixe mais il est à droite du fixe et enfin il peut aussi êtrecomplètement à droite.1) [x− 1/2, x+ 1/2] est à gauche et extérieur à [−1/2, 1/2]alors x+ 1/2 < −1/2 ⇐⇒ x < −1 et h(x) = 0.2) [x− 1/2, x+ 1/2] est à gauche et a une intersection non vide avec [−1/2, 1/2]alors x− 1/2 ≤ −1/2 ≤ x+ 1/2 ⇐⇒ −1 ≤ x ≤ 0 et
h(x) =
∫ x+1/2
−1/2
1 dy = x+ 1/2− (−1/2) = x+ 1
3) [x − 1/2, x + 1/2] est dans [−1/2, 1/2] ici comme les deux intervalles ont la mêmelongueur cela correspond seulement à x = 0 et alors
h(x) =
∫ 1/2
−1/2
1 dy = 1/2− (−1/2) = 1
4) [x− 1/2, x+ 1/2] est à droite et a une intersection non vide avec [−1/2, 1/2]alors x− 1/2 ≤ 1/2 ≤ x− 1/2 <⇐⇒ 0 ≤ x ≤ 1 et
h(x) =
∫ +1/2
x−1/2
1 dy = 1/2− (x− 1/2) = 1− x
5) [x− 1/2, x+ 1/2] est à droite et extérieur à [−1/2, 1/2]alors 1/2 < x− 1/2 <⇐⇒ 1 < x et h(x) = 0.
Le graphe de la fonction h, produit de convolution de P1 par P1 est :

Le produit de convolution 31
On peut calculer la dérivée de la fonction h en tout point x 6= −1, 0, 1 et on a :
h′(x) =
1 pour x ∈]− 1, 0[−1 pour x ∈]0,+1[0 pour x ∈]−∞,−1[∪]1,+∞[
or la dérivée de la fonction P1 est 0 sauf en x = ±1/2 , on a donc P ′1 ∗ P1 = 0 et ce n’estdonc pas (P1 ∗ P1)′ ( en effet P1 n’est pas dérivable sur tout IR ).
On verra que grâce à l’utilisation de la notion de dérivation au sens des distribu-tions et à l’utilisation de distributions de Dirac, on pourra vérifier que, au sens desdistributions, (P1 ∗ P1)′ = P ′1 ∗ P1 et que dans ce cadre la formule (f ∗ g)′ = f ′ ∗ g estvraie sans aucune restriction !
4.4 Utilité du produit de convolutionConsidérons l’équation différentielle suivante :
y′(t) + ay(t) = f(t) pour t > 0 (4.5)y(0) = y0 (4.6)
En multipliant l’équation par eat, le premier membre devient (y′(t) + ay(t)) eat qui est ladérivée de y(t)eat.En calculant l’intégrale, entre 0 et x, des 2 membres de l’égalité (4.5) on obtient :[
y(t)eat]x
0=
∫ x
0
f(t)eat dt
on obtient la solution :
y(x) = y0e−ax + e−ax
∫ x
0
f(t)eat dt
Le premier terme est la solution générale de l’équation différentielle linéaire sanssecond membre relative à (4.5) (dite aussi équation homogène). Le second terme estla solution particulière qui s’annule en 0 de (4.5) . En faisant passer la quantité e−ax ,constante par rapport à t , dans l’intégrale, on obtient :
e−ax∫ x
0
f(t)eat dt =
∫ x
0
f(t)eat−ax dt =
∫ x
0
f(t)e−a(x−t) dt

32 Analyse
Cette intégrale n’est autre que le produit de convolution de 2 fonctions causales : f(x)u(x)et e−axu(x) où u(x) désigne la fonction échelon .On constate qu’une solution particulière de l’équation complète est obtenue enfaisant le produit de convolution du second membre avec la solution de l’équationhomogène.En résumé la solution de (4.5) avec la donnée initiale (4.6) est
y(x) = y0e−ax + (f ∗ h)(x) où h(x) = e−axu(x)
Lorsque (4.5) est l’équation liant l’entrée f d’un filtre linéaire à la sortie y, on constateque pour y0 = 0 , la sortie correspondante y est le produit de convolution de l’entréef par h qu’on appelle réponse impulsionnelle (on verra pourquoi lors de l’étude desdistributions).Le produit de convolution intervient naturellement pour résoudre les systèmes différentielslinéaires à coefficients constants. La quantité (f ∗ h)(x) représente un effet mémoire de fqui décroit au fur et à mesure que x augmente (c. à d. plus le temps x passe plus l’effetdu passé devient petit ).
4.5 Intercorrélation, autocorrélationEn traitment du signal, l’autocorrélation est souvent une fonction d’un temps dont lavariable est notée τ . C’est donc cette notation que nous utilisons ici.
Définition 4.2 L’intercorrélation de deux fonctions f et g est définie par :
Kf,g(τ) =
∫ +∞
−∞f(u+ τ)g(u) du
=
∫ +∞
−∞f(v)g(v − τ) dv
= Kg,f (−τ)
Définition 4.3 L’autocorrélation de f est définie par :
K(τ) =
∫ +∞
−∞f(u+ τ)f(u) du (4.7)
Proposition 4.6 L’autocorrélation de f est toujours majorée en module par le carré dela norme de f dans L2(IR) (autrement dit l’autocorrélation est majorée par l’énergie dusignal) et il y a égalité pour τ = 0.
∀τ ∈ IR |K(τ)| ≤ ‖f‖2L2 et K(0) = ‖f‖2
L2 (4.8)

Le produit de convolution 33
Démonstration. D’après l’inégalité de Schwarz, on a∣∣∣∣∫ +∞
−∞f(u+ τ)f(u) du
∣∣∣∣ ≤ ‖ f(.+ τ)‖L2
∥∥∥ f(.)∥∥∥L2
or ‖ f(.+ τ)‖2L2 =
∫ +∞
−∞|f(u+ τ)|2 du =
∫ +∞
−∞|f(y)|2 dy = ‖f‖2
L2
car l’énergie d’un signal est invariante par translation (y = u+ τ d’où dy = du )
et∥∥∥ f(.)
∥∥∥2
L2= ‖f‖2
L2 car |f(t)|2 =∣∣∣f(t)
∣∣∣2 donc on a pour toute valeur de τ , |K(τ)| ≤ ‖f‖2L2
par ailleurs l’égalité a lieu pour τ = 0.
4.5.1 Cas d’un signal réel
Proposition 4.7 Si f est un signal réel, l’autocorrélation de f est une fonction paire.C’est le produit de convolution de f par f où f est la fonction retournée définie parf(t) = f(−t) :
K(τ) = K(−τ) et K = f ∗ f (4.9)
Démonstration. On a :
K(τ) =
∫ +∞
−∞f(u+ τ)f(u) du =
∫ +∞
−∞f(v)f(v − τ) dv = (f ∗ f)(τ) (4.10)

34 Analyse

Chapitre 5
La transformation de Laplace
La transformation de Fourier est très utile car elle remplace une dérivation par unesimple multiplication par 2iπν et un produit de convolution par un produit de deuxfonctions. Malheureusement elle ne peut être utilisée que pour des fonctions sommables oude carré sommable ; cela exclut par exemple les polynômes et les exponentielles croissantes.
Pour pouvoir travailler de la même façon avec ces fonctions là, on introduit latransformation de Laplace.
Les propriétés générales de la transformation de Laplace sont similaires aux propriétésde la transformation de Fourier. La transformation de Fourier s’applique aux fonctionsdéfinies sur IR mais à condition qu’elles soient dans L1(IR) ou dans L2(IR) . La transfor-mation de Laplace ne s’applique qu’à des fonctions définies sur IR+ et prolongées par 0sur IR− mais qui peuvent éventuellement tendre vers une constante ou vers ∞ à l’infini .
5.1 Définition de la transformation de LaplaceDéfinition 5.1 La transformée de Laplace d’une fonction f est la fonction L(f) définiepar :
L(f)(p) =
∫ +∞
0
f(t) exp(−pt) dt (5.1)
où p est une variable réelle ou complexe.
La transformée de Laplace d’une fonction f n’existe que si l’intégrale ci-dessus est définie.Il suffit pour cela que f soit
- continue par morceaux sur [0,+∞[- à croissance au plus exponentielle à l’infini, c’est à dire que pour t assez grand, parexemple t > A, il existe M > 0 et α tels que :
|f(t)| < M exp(αt)
35

36 Analyse
Sous ces hypothèses, la transformée de Laplace L(f)(p) est dé finie pour tout p > α,si p est réel, ou, si p est complexe, pour Re(p) > α.
La plus petite valeur de α telle que L(f)(p) soit définie pour tout p vérifiant Re(p) > α,est appelée abscisse de convergence de la transformée de Laplace de f .
Il est important de noter que la transformation de Laplace ne dépend que des valeursde la fonction sur IR+. Sur IR− on suppose que f est identiquement nulle.
Exemples
1. Soit u(t) la fonction échelon définie par u(t) = 1 pour t ≥ 0 et u(t) = 0 pourt < 0. Alors
L(u(t))(p) =
∫ +∞
0
exp(−pt) dt =
[exp(−pt)−p
]+∞
0
L’exponentielle exp(−pt) est un nombre complexe de module égal à |exp(−pt)| =exp(−Re(p)t) .Si Re(p) > 0 alors exp(−Re(p)t) →
t→+∞0 , exp(−pt) est donc sommable sur IR+ et
on a : ∫ +∞
0
exp(−pt) dt = 0− 1
−p=
1
p
Si Re(p) < 0 , exp(−pt) n’est pas sommable sur IR+ et L(u(t))(p) n’est pas définie.On a donc :
pour Re(p) > 0 L(u(t))(p) =1
p(5.2)
2. Soit l’exponentielle causale définie par u(t) exp(at). On a :
L(u(t) exp(at))(p) =
∫ +∞
0
exp(at) exp(−pt) dt
=
[exp((a− p)t)
a− p
]+∞
0
L’intégrale ne converge que pour Re(p− a) > 0 . Donc
pour Re(p− a) > 0 L(u(t) exp(at))(p) =1
p− a−→
3. Si a = iω avec ω réel, Re(p− i$) = Re(p) on déduit de ce qui précède :
pour Re(p) > 0 L(u(t) exp(iωt))(p) =1
p− iω
de même :
pour Re(p) > 0 L(u(t) exp(−iωt))(p) =1
p+ iω(5.3)

La transformation de Laplace 37
d’où en utilisant les formules d’Euler :
pour Re(p) > 0 L(u(t) cos(ωt))(p) =p
p2 + ω2(5.4)
pour Re(p) > 0 L(u(t) sin(ωt))(p) =ω
p2 + ω2(5.5)
5.2 Propriétés générales
Comme la transformation de Fourier, la transformation de Laplace est une applicationlinéaire, c’est à dire que pour tous λ et µ réels ou complexes :
L(λf + µg) = λL(f) + µL(g) (5.6)
On retrouve pour la transformation de Laplace le même type de proprié tés que pourtransformation de Fourier.Dans ce qui suit, la constante a est supposée strictement positive.
Théorème 5.1 du retard :
L(u(t− a)f(t− a))(p) = e−paL(f(t))(p) (5.7)
Démonstration.
L(u(t− a)f(t− a))(p) =
∫ +∞
a
f(t− a) exp(−pt) dt
=
∫ +∞
0
f(x) exp(−p(x+ a)) dx
= e−pa∫ +∞
0
f(x) exp(−px) dx
et on a la propriété réciproque :
L(eatf(t))(p) = L(f)(p− a) (5.8)
Théorème 5.2 de changement d’échelle :
L(f(at))(p) =1
aL(f(t))(
p
a) (5.9)

38 Analyse
en effet :
L(f(at))(p) =
∫ +∞
0
f(at) exp(−pt) dt
=
∫ +∞
0
f(x) exp(−pxa
)dx
a=
1
aL(f(t))(
p
a)
Théorème 5.3 de la dérivée : si f est dérivable sur IR+ tout entier et si f et f ′ sontà croissance au plus exponentielle à l’infini, alors :
L(f ′)(p) = pL(f)(p)− f(0+) (5.10)
en effet en faisant une intégration par partie :
L(f ′)(p) =
∫ +∞
0
f ′(t) exp(−pt) dt
= [f(t) exp(−pt)]+∞0 −∫ +∞
0
−pf(t) exp(−pt) dt
Comme f est à croissance au plus exponentielle à l’infini, pour t grand il existe M > 0 etα tels que :
|f(t) exp(−pt)| < M exp(αt) exp(−Re(p)t)donc pour Re(p) > α , f(t) exp(−pt) →
t→+∞0 et donc en notant f(0+) la limite à droite
de f(t) quand t→ 0, on obtient le résultat annoncé.
Plus généralement, si f , f ′ , f” ... , f (n) sont définies sur IR+ tout entier et si ellessont à croissance au plus exponentielle à l’infini, on a :
L(f”)(p) = p2L(f)(p)− pf(0+)− f ′(0+) (5.11)
L(f (n))(p) = pnL(f)(p)− pn−1f(0+)− pn−2f ′(0+)− ...− f (n−1)(0+) (5.12)
On a la propriété réciproque :
dL(f)(p)
dp= L(−tf(t))(p) (5.13)
en effet il suffit de dériver sous le signe intégral :
d
dp
(∫ +∞
0
f ′(t) exp(−pt) dt)
=
∫ +∞
0
−tf ′(t) exp(−pt) dt
d’où la formule générale :
dnL(f)(p)
dpn= (−1)nL(tnf(t))(p) (5.14)

La transformation de Laplace 39
Corollaire 5.1 La transformée de Laplace de la fonction polynomiale u(t)tn est :
L(u(t)tn)(p) =n!
pn+1(5.15)
En effet d’après (5.14) et connaissant la transformée de l’échelon (5.2) on a :
L(u(t)tn)(p) = (−1)ndnL(u)(p)
dpn
etdn
dpn
(1
p
)= (−1)(−2)....(−n)
1
pn+1
Théorème 5.4 Transformée de Laplace et convolution
L(f ∗ g) = L(f)L(g) (5.16)
Théorème 5.5 de la valeur initiale
limp→+∞
pL(f)(p) = f(0+) (5.17)
Théorème 5.6 de la valeur finale
limp→0+
pL(f)(p) = limt→+∞
f(t) (5.18)
Remarque : Contrairement à ce qui ce passe pour la transformation de Fourier, il n’existepas pour la transformation de Laplace, une transformation inverse simple.Cependant, on doit remarquer que si deux fonctions ont même transformée deLaplace, elles sont égales presque partout sur IR+.Si, de plus, ces fonctions sont continues sur IR+, elles sont égales partout.
Conséquence pratique :Si une transformée de Laplace est une fraction rationnelle, pour trouver son antécédant, ilsuffit donc de décomposer cette fraction rationnelle en éléments simples, de lire à l’enversun tableau des transformées de Laplace usuelles et d’utiliser la linéarité.
5.3 Utilisation de la transformation de LaplaceLa transformation de Laplace est parfaitement adaptée pour résoudre les équationsdifférentielles linéaires et les systèmes différentiels linéaires. La formule (5.12) permetde prendre en compte directement les données initiales, ce qui évite de devoir déterminerles n constantes arbitraires de la solution générale d’une équation différentielle d’ordre nà l’aide des conditions initiales.

40 Analyse
Exemple 5.1 Résoudre l’équation différentielle linéaire, c’est à dire trouver les fonctionsdeux fois dérivables sur IR+ qui vérifient pour tout t > 0 :
ty′′ + 2y′ + ty = 0 avec y(0) = 1
On peut s’étonner qu’il n’y ait qu’une condition initiale alors que l’équation différentielleest d’ordre 2, mais en fait l’équation différentielle impose que, pour t = 0 , y′(0) = 0 .En notant Y (p) = L(y(t))(p) , on obtient en utilisant (5.12) et (5.13) :
− d
dp
(p2Y (p)− p
)+ 2(pY (p)− 1)− d
dp(Y (p)) = 0
d’où −(p2 + 1)Y ′(p)− 1 = 0 et
− d
dpY (p) =
1
1 + p2. (5.19)
D’après les formules (5.13) et (5.5) on a
L(ty(t)) = L(sin t)
Cela entaine l’égalité presque partout des fonctions ty(t) et sin t ; mais comme ces fonctionssont continues sur IR+ elle sont donc égales partout :
y(t) =sin t
tpour t > 0
Quant à la transformée de Laplace de y, on a d’après (5.13) et en intégrant (5.19) :
Y (p) = − arctan p+ Cste
or arctan p + arctan 1p
= π2et donc on peut aussi écrire : Y (p) = arctan 1
p+ K avec
K = Cste− π2. En utilisant (5.17) on sait que
limp→+∞
pL(f)(p) = f(0+) = 1
or p(arctan 1p) →p→+∞
1 (car arctan u ∼ u pour u voisin de 0), on obtient :
limp→+∞
pL(f)(p) = limp→+∞
p(arctan1
p+K) = 0 + lim
p→+∞pK = f(0+) = 1
ce qui impose K = 0. Donc :
Y (p) = arctan1
p(= − arctan p+
π
2)

Chapitre 6
La transformée de Fourier
6.1 Introduction
Toutes les fonctions ne sont pas périodiques ou définies sur un intervalle borné et doncprolongeable en une fonction pé riodique. Partant de la définition des coefficients deFourier complexes et en passant d’une intégration sur un intervalle borné à une int égrationsur IR tout entier dépendant non pas d’un paramè tre discret n mais d’un paramètrecontinu ν , on obtient la transformée de Fourier d’une fonction définie sur IR .
6.2 Transformée de Fourier dans L1(IR)
Définition 6.1 La transformée de Fourier de f , notée F(f) ou f , est la fonction définiepour tout ν de IR par :
F(f)(ν) =
∫ +∞
−∞f(x) exp(−2iπνx)dx (6.1)
Cette intégrale généralisée est définie et continue pour toute fonction f ∈ L1(IR).
Démonstration : En effet comme |f(x) exp(−2iπνx)| = |f(x)| , cette int égrale estabsolument convergente si f est sommable sur IR et dans ce cas le théorème de convergencedominée s’applique et F(f)(ν) est une fonction continue de ν puisque l’exponentielle estcontinue. Remarque : La transformée de Fourier permet de passer d’une description
temporelle du signal à une description en fré quence ν . Il existe une autre définition dela transformée de Fourier, souvent utilisée en mécanique, qui permet de passer du tempsà la pulsation ω (ω = 2πν). On a alors
F(f)(ω) =
∫ +∞
−∞f(x) exp(−iωx)dx
41

42 Analyse
L’avantage de cette écriture est d’être un peu plus proche de celle de la transformationde Laplace que l’on verra ensuite et qui est l’outil adéquat pour les fonctions causales.Par contre cela impose la division par un facteur 2π pour obtenir la transformée deFourier inverse et bien sur les formules des transformées de Fourier usuelles sont légèrementdifférentes.
Exemples de transformées de Fourier
1. La fonction porte Pa(x) (notée aussi Π(xa) ) vaut 1 sur l’intervalle ]− a/2, a/2[ et
0 ailleurs
F(Pa)(ν) =
∫ +a/2
−a/2exp(−2iπνx)dx =
exp(−iπνa)− exp(iπνa)
−2iπν
Ce calcul n’est valable que si ν 6= 0 et alors
F(Pa)(ν) = asin(πνa)
πνa
Si ν = 0
F(Pa)(ν) =
∫ +a/2
−a/2dx = a
2. L’exponentielle causale définie par f(x) = u(x) exp(−ax) où u(x) est la fonctionéchelon (notée aussi Y (x) ou H(x) comme Heaviside du nom de son inventeur).
F(f)(ν) =
∫ +∞
0
exp(−ax) exp(−2iπνx)dx =
[exp(−(a+ 2iπν)x)
−(a+ 2iπν)
]+∞
0
comme |exp(−(a+ 2iπν)x)| = |exp(−ax) exp(−2iπνx)| = exp(−ax) et qu’il fautimposer a > 0 afin que la fonction f soit sommable sur IR, la limite de cette quantitéest 0 lorsque x tend vers +∞. Donc
F(u(x) exp(−ax))(ν) =1
(a+ 2iπν)
Remarque : Les deux transformées de Fourier qui viennent d’être calculées ne sont pasdes fonctions sommables sur IR, mais elles sont de carré sommable. Il serait donc intéressant de pouvoir étendre la définition de la transformée de Fourier aux fonctions deL2(IR) ce qui sera fait ci-dessous.
Proposition 6.1 (Admise) Si f ∈ L1(IR) la transformée de Fourier de f est une fonctionde ν continue et bornée sur IR et F(f)(ν) →
ν→±∞0 .

La transformée de Fourier 43
6.3 Propriétés de la transformée de FourierLes propriétés qui suivent sont valables que f soit dans L1(IR) ou que f soit dans L2(IR)(car l’on verra que l’on peut étendre la transformation de Fourier à l’espace L2(IR)).
Théorème 6.1 (admis) Si f et sa transformée de Fourier F(f) sont dans L1(IR) alors
f(x)pp=
∫ +∞
−∞F(f)(ν) exp(2iπνx)dν (6.2)
Plus précisément, si f est continue et dérivable par morceaux on a :∫ +∞
−∞F(f)(ν) exp(2iπνx)dν =
1
2
(f(x+) + f(x−)
)(6.3)
L’intégrale∫ +∞−∞ F(f)(ν) exp(2iπνx)dν est donc :
- égale à f(x) pour tout x où la fonction f est continue,- égale à la demi somme des limites à droite et à gauche en x de f sinon.
Définition 6.2 La transformée de Fourier inverse d’une fonction g est la fonctionnotée F−1(g) ou g ou encore
___F (g), définie pour tout ν de IR par :
F−1(g)(ν) =
∫ +∞
−∞g(x) exp(2iπνx)dx (6.4)
on a bien :F−1(F(f))
pp= F(F−1(f))
pp= f (6.5)
On remarque que si f est réelle alors F−1(f)(ν) est aussi_________F(f)(ν) , le complexe
conjugué de F(f)(ν) .
Proposition 6.2 : Symétrie hermitienne :
F−1(f(x)) = F(f(−x))
et donc si f est paire F−1(f) = F(f).
Démonstration : Le changement de variable u = −x donne du = −dx d’où
F−1(f(x))(ν) =
∫ +∞
−∞f(x) exp(2iπνx)dx = −
∫ −∞+∞
f(−u) exp(2iπν(−u))du
=
∫ +∞
−∞f(−u) exp(−2iπνu)du = F(f(−x))(ν).

44 Analyse
Théorème 6.2 1) La transformation de Fourier est une application linéaire
∀λ, µ ∈ C F(λf + µg) = λF(f) + µF(g)
2) f et F(f) ont même parité,
3) Si f est réelle et paire F(f) aussiSi f est réelle et impaire F(f) est imaginaire pure et impaire.
Démonstration : 2) Le changement de variable s = −x donne ds = −dx d’oùF(f)(−ν) =
∫ +∞−∞ f(x) exp(−2iπ(−ν)x)dx = −
∫ −∞+∞ f(−s) exp(−2iπνs)ds
après avoir changé le signe et les borneson a si f est paire F(f)(−ν) = F(f)(ν)et si f est impaire F(f)(−ν) = −F(f)(ν)
3) Le complexe conjugué de F(f)(ν) est_________F(f)(ν) =
∫ +∞−∞
______f(x) exp(+2iπνx)dx
donc pour f réelle_________F(f)(ν) = F−1(f(x))(ν) = F(f(−x))(ν)
Or pour z ∈ C, z est réel si z = z et imaginaire pur si z = −zEt donc pour f réelle et paire
_________F(f)(ν) = F(f(x))(ν) donc F(f) est r éelle,
Pour f réelle et impaire_________F(f)(ν) = −F(f(x))(ν) donc F(f) est imaginaire pure.
Théorème 6.3 Propriétés générales1) du retard :
F(f(x− a))(ν) = e−2iπνaF(f(x))(ν)
2) et de la translation en fréquence
F(e−2iπxaf(x))(ν) = F(f)(ν + a)
3) du changement d’échelle :
F(f(ax))(ν) =1
|a|F(f(x))(
ν
a)
Démonstration 1) En posant s = x− a d’où ds = dx , on aF(f(x− a))(ν) =
∫ +∞−∞ f(x− a) exp(−2iπνx)dx
. =∫ +∞−∞ f(s) exp(−2iπν(s+ a)ds
. =∫ +∞−∞ f(s) exp(−2iπνs) exp(−2iπνa)ds
. = exp(−2iπνa)∫ +∞−∞ f(s) exp(−2iπνs)ds
2) F(e−2iπxaf(x))(ν) =∫ +∞−∞ f(x)e−2iπxae−2iπνxdx = F(f)(ν + a)
3) F(f(ax))(ν) =∫ +∞−∞ f(ax) exp(−2iπνx)dx
En posant s = ax d’où ds = adx , si a est positif les bornes sont inchangées mais si a estnégatif les bornes sont échangées mais ds = − |a| dx d’oùF(f(ax))(ν) =
∫ +∞−∞ f(s) exp(−2iπνs
a) ds|a| = 1
|a|F(f(x))(νa)

La transformée de Fourier 45
Théorème 6.4 sur la transformée de Fourier des dérivées :1) Si f est continue sur IR , si f et sa dérivée f ′ sont dans L1(IR) alors :
F(f ′)(ν) = 2iπνF(f)(ν)
2) si f , f ′ , f” ... , f (n−1) sont continues sur IR et toutes dans L1(IR) ainsi que f (n) :
F(f (n))(ν) = (2iπν)nF(f)(ν)
Démonstration : Comme f est continue et que f ′ est dans L1(IR) l’intégrale∫ +X
0f ′(x)dx =
f(X) − f(0) converge quand X → +∞ donc f(X) → L. Mais comme f est sommablesur IR ondoit avoir L = 0 .F(f ′)(ν) =
∫ +∞−∞ f ′(x) exp(−2iπνx)dx
. = [f(x) exp(−2iπνx)]+∞−∞ −∫ +∞−∞ −2iπνf(x) exp(−2iπνx)dx
Donc le crochet est nul et F(f ′)(ν) = 2iπνF(f)(ν) .
Théorème 6.5 sur la dérivation de la transformée de Fourier :1)Si f(x) et xf(x) sont dans L1(IR)
dF(f)(ν)
dν= (−2iπ)F(xf(x))(ν)
2) Si f(x) et xnf(x) sont dans L1(IR)
dnF(f)(ν)
dνn= (−2iπ)nF((x)nf(x))(ν)
Démonstration : 1) F(f)(ν) =∫ +∞−∞ f(x) exp(−2iπνx)dx
Pour calculer la dérivée de F(f)(ν) on dérive par rapport à ν sous l’intégrale :
dF(f)(ν)
dν=
∫ +∞
−∞f(x)(−2iπx) exp(−2iπνx)dx
Corollaire 6.1 Si f ∈ L1(IR) est nulle hors d’un intervalle borné, sa transformée deFourier F(f) est dans C∞(IR).
Démonstration : Si f est nulle hors d’un intervalle borné [−A,A] et appartient à L1(IR)alors, pour tout entier n , xnf(x) est dans L1(IR) car majoré par An |f(x)| et donc F(f)est indé finiment dérivable.

46 Analyse
Définition 6.3 Si f et g sont dans L1(IR) alors leur produit de convolution f ∗ g existeet est dans L1(IR)
(f ∗ g)(x) =
∫ +∞
−∞f(x− y)g(y)dy
Théorème 6.6 Transformée de Fourier et convolution
F(f ∗ g) = F(f)F(g)
et :F(fg) = F(f) ∗ F(g)
Démonstration : F(f ∗ g)(ν) =∫ +∞−∞
(∫ +∞−∞ f(x− y)g(y)dy
)exp(−2iπνx)dx
en permuttant l’ordre d’intégration dans l’intégrale double on a :
F(f ∗ g)(ν) =
∫ +∞
−∞
(∫ +∞
−∞f(x− y) exp(−2iπνx)dx
)g(y)dy
=
∫ +∞
−∞e−2iπνyF(f)(ν)g(y)dy
= F(f)(ν)
∫ +∞
−∞e−2iπνyg(y)dy
= F(f)(ν)F(g)(ν)
6.4 Transformée de Fourier dans L2(IR)
Une fonction f de L2(IR) peut toujours être consid érée comme la limite d’une suite defonctions appartenant à la fois à L2(IR) et à L1(IR). En effet, considé rons la fonctiontronquée fn, égale à f sur l’intervalle [−n, n], et nulle ailleurs.Cette fonction fn est bien dans L2(IR) car :∫ +∞
−∞|fn(x)|2 dx =
∫ +n
−n|fn(x)|2 dx =
∫ +n
−n|f(x)|2 dx ≤
∫ +∞
−∞|f(x)|2 dx
donc ‖fn‖L2 ≤ ‖f‖L2 et de plus ‖fn − f‖L2 →n→+∞
0 La suite de fonctions fn converge vers
f dans L2(IR). De plus les fonctions fn sont dans L1(IR) d’après l’inégalité de Schwarzcar :∫ +∞
−∞|fn(x)| dx =
∫ +∞
−∞
∣∣fn(x).1I[−n,n]
∣∣ dx ≤ (∫ +n
−n|f(x)|2 dx
) 12(∫ +n
−n|1|2 dx
) 12
≤√
2n ‖fn‖L2
donc on peut appliquer la définition et calculer F(fn) . On définit donc la transformée deFourier de f , quand f n’est pas dans L1(IR) mais seulement dans L2(IR), par la limitede la suite de fonctions F(fn) dans L2(IR) .

La transformée de Fourier 47
Définition 6.4 La transformée de Fourier de f ∈ L2(IR) est dé finie par∫ +n
−nf(x) exp(−2iπνx)dx
L2(IR)→n→+∞
F(f)(ν)
Remarque : En pratique, on oubliera souvent de pré ciser que F(f)(ν) est la limitedans L2(IR) de la suite
∫ +n
−n f(x) exp(−2iπνx)dx et on écrira, par abus de language,F(f)(ν) =
∫ +∞−∞ f(x) exp(−2iπνx)dx, sachant que l’on peut donner un sens précis à cette
expression que f soit dans L1(IR) ou dans L2(IR) . Remarque : Un exemple type defonction qui est dans L2(IR) mais pas dans L1(IR) est la fonction sinus cardinal dont latransformée de Fourier est :
F(sin(πxa)
πxa)(ν) = Pa(ν)
Elle est discontinue en ±a/2. En effet quand f n’est pas dans L1(IR), sa transformée deFourier n’est plus forcément continue. Cependant , à part la continuité et la dérivabilité,
toutes les autres propriétés du paragraphe 2 s’étendent dans le cas o ù f est seulementdans L2(IR).
Théorème 6.7 ParsevalSi f est dans L2(IR) alors sa transformée de Fourier F(f) est aussi dans L2(IR) et lesfonctions f et F(f) ont de plus des normes égales :∫ +∞
−∞|f(x)|2 dx =
∫ +∞
−∞|F(f)(ν)|2 dν (6.6)
Si f est un signal electronique, sa norme dans L2(IR) représente son énergie que l’on peutdonc calculer à l’aide de l’une ou l’autre des intégrales ci-dessus.La quantité |F(f)(ν)|2 est appelée densité spectrale d’énergie du signal f car ilfaut intégrer cette quantité sur l’ensemble du spectre pour avoir l’énergie. Quant àF(f)(ν) , c’est le spectre d’énergie du signal f et le module |F(f)(ν)| est le spectred’amplitude tandis que l’argument de F(f)(ν) est le spectre de phase.
Remarque 6.1 La transformée de Fourier F( f) est parfois définie comme une fonctionde la pulsation ω = 2πν , mais dans ce cas la transformation inverse est
F−1(f)(x) =1
2π
∫ +∞
−∞f(ω) exp(iωx)dω avec f(ω) =
∫ +∞
−∞f(x) exp(−iωx)dx
et ∫ +∞
−∞|f(x)|2 dx =
1
2π
∫ +∞
−∞|F(f)(ω)|2 dω

48 Analyse
6.5 Transformée de Fourier des fonctions usuelles
Comme les fonctions ci-dessous sont paires, on a F−1(f) = F(f), et donc le tableauindique des couples de fonctions f et g telles que F(f) = g et F(g) = f et peut se liredans les deux sens.
Pa(x) � asin(πνa)
πνa
∆a(x) � a
(sin(πνa)
πνa
)2
exp(−a |x|) �2a
a2 + 4π2ν2
exp(−ax2) �
√π
aexp(−π
2ν2
a)
6.6 Autocorrélation temporelle et Fourier
On rappelle la définition de l’autocorrélation
Définition 6.5 L’autocorrélation de f est définie par :
K(τ) =
∫ +∞
−∞f(u+ τ)f(u) du (6.7)
Remarque : Si f est un signal réel, et si on note f la fonction définie par f(x) = f(−x),
on peut remarquer que l’autocorrélation de f est le produit de convolution de f par f ,on a :
K(τ) = (f ∗ f)(τ)
c’est une fonction paire K(τ) = K(−τ) et on a
∀τ, |K(τ)| ≤ ‖f‖2L2
Il y a égalité pour τ = 0 , l’autocorrélation est maximale en 0 et elle est majorée par lecarré de la norme de f dans L2(IR).

La transformée de Fourier 49
Théorème 6.8 Wiener-Kinchine : Si f est un signal réel, la transformée de Fourierde l’autocorrélation de f est égale à la densité spectrale d’énergie de f :
F(K)(ν) = |F(f)(ν)|2
Démonstration :F(K) = F(f ∗ f) = F(f)F(f)
or
F(f)(ν) =
∫ +∞
−∞f(−x) e−2iπxν dx =
∫ +∞
−∞f(u) e2iπuν du = F(f(x))(ν)
car f est un signal réel.

50 Analyse

Chapitre 7
Fonctions définies par une intégrale
7.1 MotivationsDans la suite de ce cours nous allons étudier1. la transformation de Fourier d’une fonction f définie sur IR :
∀ν ∈]−∞,+∞[ F(f)(ν) =
∫ +∞
−∞f(x) e−2iπνx dx
2. la transformation de Laplace d’une fonction causale f (définie sur IR+)
∀p ∈ C L(f)(p) =
∫ +∞
−∞f(x) e−px dx
3. le produit de convolution de deux fonctions f et g
∀τ ∈]−∞,+∞[ (f ∗ g)(τ) =
∫ +∞
−∞f(x)g(τ − x) dx
4. l’intercorrélation de deux fonctions f et g
∀τ ∈]−∞,+∞[ Kf,g(τ) =
∫ +∞
−∞f(x)g(τ + x) dx
Dans chacun de ces cas nous allons être amenés à étudier les propriétés de fonctionsqui sont définies par des intégrales. Les théorèmes généraux ci-dessous permettent decomprendre la genèse de certaines propriétés.
7.2 PropriétésEtudions donc la continuité et la dérivabilité d’une fonction F (y) définie par une
intégrale sur I :
F (y) =
∫I
f(x, y) dx
51

52 Analyse
Théorème 7.1 Si I est un intervalle fermé borné [a, b] et1) si f(x, y) est définie et continue sur [a, b]× [c, d],alors la fonction F (y) est définie et continue sur [c, d]
2) si la dérivée partielle ∂f∂y
est définie et continue sur [a, b]×]c, d[
alors la fonction F (y) est continûment dérivable sur ]c, d[ et sa dérivée est
F ′(y) =
∫ b
a
∂f
∂y(x, y) dx.
Malheureusement, si I est non borné ou si la fonction f n’est pas définie et bornéesur tout [a, b]× [c, d] , cela n’est plus toujours vrai. Dans ce cas l’intégrale est généralisée,c’est donc une limite, et les limites ne commuttent pas toujours avec la continuité et ladérivabilité.
On va donc devoir faire appel dans ces cas là à un théorème qui est une conséquenced’un théorème fondamental en analyse : le théorème de convergence dominée.
Théorème 7.2 Soit F (y) définie par une intégrale sur I (intervalle éventuellement nonborné ou f(x, y) non bornée sur I )
F (y) =
∫I
f(x, y) dx
1) si f(x, y) est définie et continue sur I × [c, d],et si il existe g(x) sommable sur I telle que
∀x ∈ I, ∀y ∈ [c, d] |f(x, y)| ≤ g(x) avec 0 ≤∫I
g(x) dx < +∞
alors la fonction F (y) est continue sur [c, d].
2) si de plus la dérivée partielle ∂f∂y
est définie et continue sur I×]c, d[ ,et si il existe h(x) sommable sur I telle que
∀x ∈ I, ∀y ∈ [c, d]
∣∣∣∣∂f∂y (x, y)
∣∣∣∣ ≤ h(x) avec 0 ≤∫I
h(x) dx < +∞
alors la fonction F (y) est continûment dérivable sur ]c, d[ et sa dérivée est
F ′(y) =dF (y)
dy=
∫I
∂f
∂y(x, y) dx.

Fonctions définies par une intégrale 53
Exemple 7.1 La transformée de Fourier F(f)(ν) d’une fonction f ∈ L1(IR) est continue.Si de plus xf(x) ∈ L1(IR) alors F(f)(ν) est dérivable et on a
d
dνF(f)(ν) =
∫ +∞
−∞
∂
∂ν(f(x) e−2iπνx) dx =
∫ +∞
−∞−2iπxf(x) e−2iπνx dx
Car comme |e−2iπνx| = |eiα| = 1 puisque α est réel et comme par hypothèse xf(x) estsommable le théorème ci-dessus s’applique et
d
dνF(f)(ν) = −2iπF(xf(x))(ν)
Si f /∈ L1(IR) mais f ∈ L2(IR) la transformée de Fourier de f est définie mais n’est plusforcément continue.
Exemple 7.2 Des fonctions très utiles sont définies, elles aussi, par des intégralescomme :
1. la fonction gamma
∀x ∈ IR+ Γ(x) =
∫ +∞
−∞yx−1e−y dy
2. la fonction de Bessel J0
∀x ∈ IR J0(x) =2
π
∫ 1
0
cos(xy)√1− y2
dy
![µ µ W Z © W l l P o ] r Z } r À X · 2018-06-01 · µ µ v } ] Æ u } µ } µ v } µ X & XU 6DFUp GH -pVXV $\H] SLWLp GH 1RXV î r s ã ... ã r x s w r r v x w](https://img.pdfslide.fr/doc/110x75/5b9986c209d3f294728c10bb/-w-z-w-l-l-p-o-r-z-r-a-x-2018-06-01-v-a-u-.jpg)

![GLYHUVHV Â $',/ r î u ] U ~ õ Z r í î Z U } u u X } u u µ v X Â $VVRFLDWLRQ YHXIV HW YHXYHV r W u v v o í o µ v ] µ v } ] } µ o µ o U ~ í ð Z r í ò Z X X ì î X õ](https://img.pdfslide.fr/doc/110x75/5b02dad67f8b9a65618fe069/glyhuvhv-r-u-u-z-r-z-u-u-u-x-u-u-v-x-vvrfldwlrq-yhxiv-hw-yhxyhv-r.jpg)
![[x] 9 @ @ [R] unques [x] unques [R] [x] ueanXs [R] unques [x] unques [K] — [x] unques [x] ueanRs [R] unques [x] Unques [R] [x] ueanRs © @ [R] unques [X J treanRs nsosuetl g J ueH](https://img.pdfslide.fr/doc/110x75/5ccc668e88c993de558c4d0c/x-9-r-unques-x-unques-r-x-ueanxs-r-unques-x-unques-k-x.jpg)


![5: 5: 5: 5: 5: · zh]K YAg zh 1 W@n H&0~ = 3zz Y÷ 3 0¦n H&0~ T RÐ5 x WM4 5 x R R 5 x 4N3Ï4Zr8D(X 5 x R R 5 x r 3e 3W\ýD.=ÑH+5éW75 x BÝ3ÍX 0Ò; 5ï4H5 =Ë o:T Ew;I såsç](https://img.pdfslide.fr/doc/110x75/6126f0dd8340f42df324746a/5-5-5-5-5-zhk-yag-zh-1-wn-h0-3zz-y-3-0n-h0-t-r5-x-wm4.jpg)

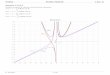



![K ( X E } X & r'' r ì î ò r í õ ^ y } } v } u ] W v X...direccion distrital 21d01-cascales-gonzalo pizarro-sucumbios salud 1792488761001 farmabion del ecuador c.a. -12 10000 4500](https://img.pdfslide.fr/doc/110x75/60f9b051dcc05b299e7a19f2/k-x-e-x-r-r-r-y-v-u-w-v-x-direccion-distrital.jpg)