Embed Size (px)
Citation preview
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :AUBENQUE Baptiste
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 500 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
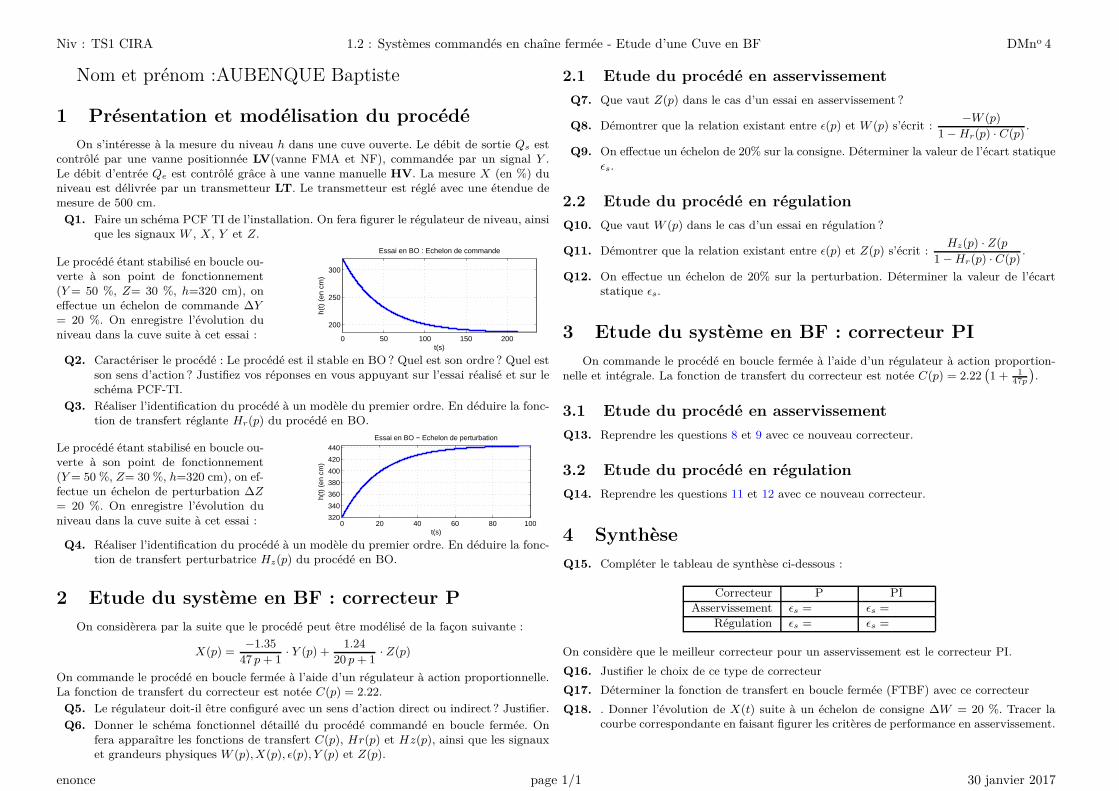
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 30 %, h=320 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200
200
250
300
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
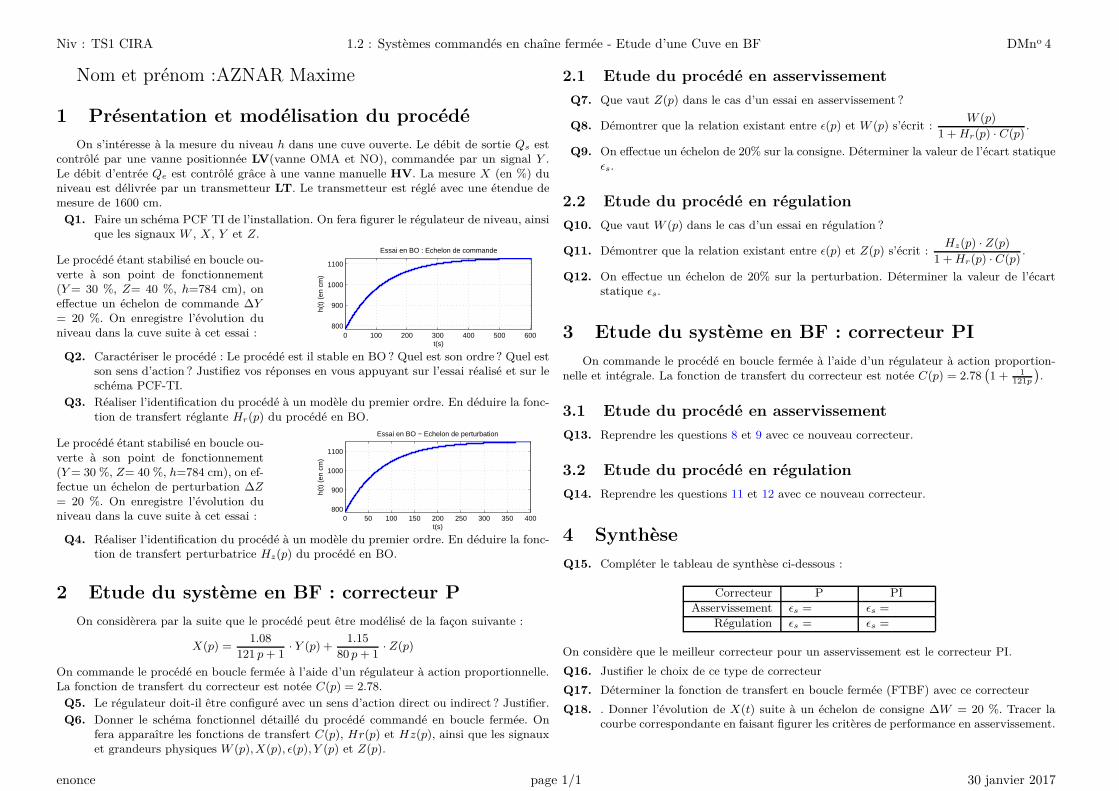
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 30 %, h=320 cm), on ef-fectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 20 40 60 80 100
320
340
360
380
400
420
440Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −1.3547 p + 1 · Y (p) + 1.24
20 p + 1 · Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.22.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.22(1 + 1
47p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :AZNAR Maxime
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne OMA et NO), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1600 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
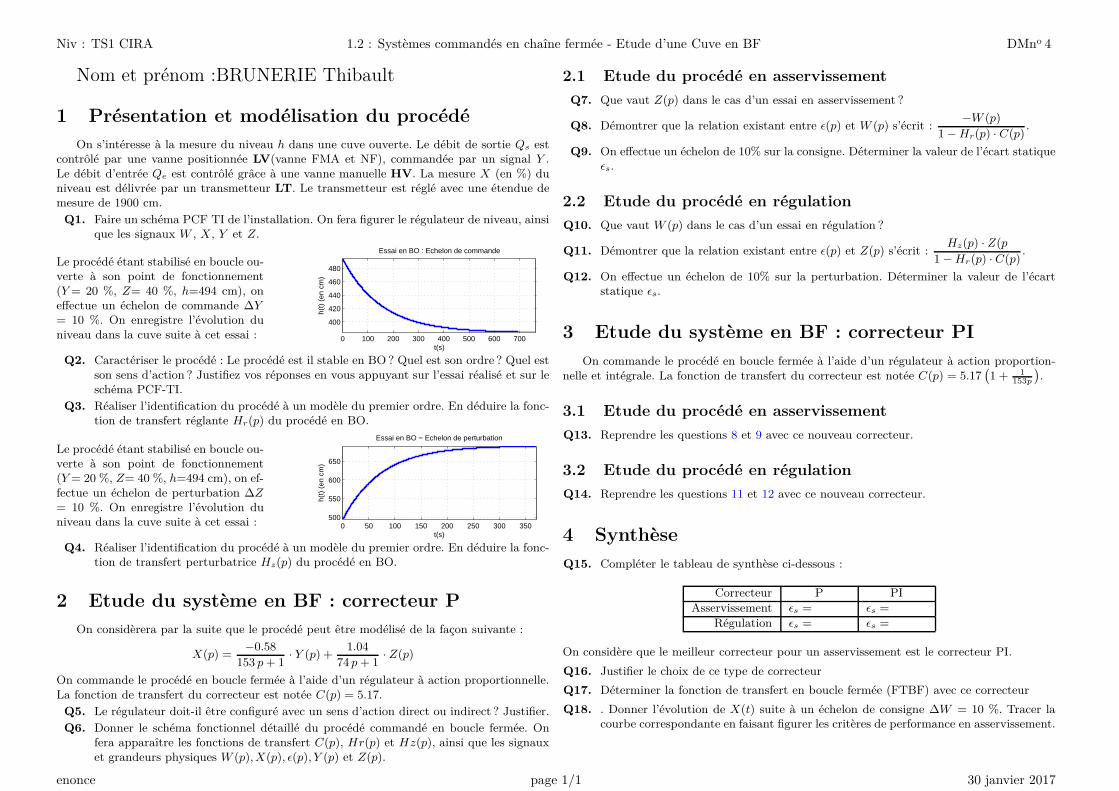
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 40 %, h=784 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600
800
900
1000
1100
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
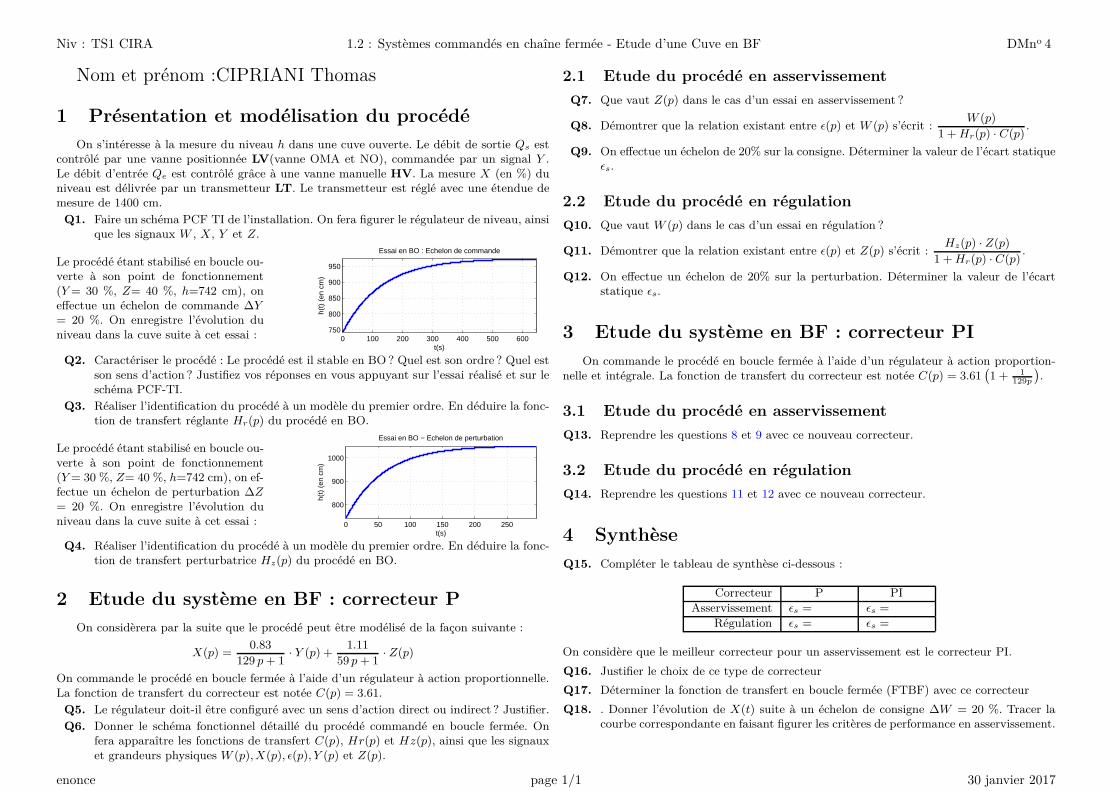
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 40 %, h=784 cm), on ef-fectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250 300 350 400
800
900
1000
1100
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 1.08121 p + 1 · Y (p) + 1.15
80 p + 1 · Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.78.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.78(1 + 1
121p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :BRUNERIE Thibault
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1900 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 20 %, Z= 40 %, h=494 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600 700
400
420
440
460
480
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 20 %, Z= 40 %, h=494 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250 300 350
500
550
600
650
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −0.58153 p + 1
· Y (p) + 1.0474 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 5.17.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 5.17(1 + 1
153p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :CIPRIANI Thomas
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne OMA et NO), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1400 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 40 %, h=742 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600
750
800
850
900
950
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 40 %, h=742 cm), on ef-fectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250
800
900
1000
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 0.83129 p + 1
· Y (p) + 1.1159 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 3.61.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 3.61(1 + 1
129p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :DESCUBES Damien
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1100 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
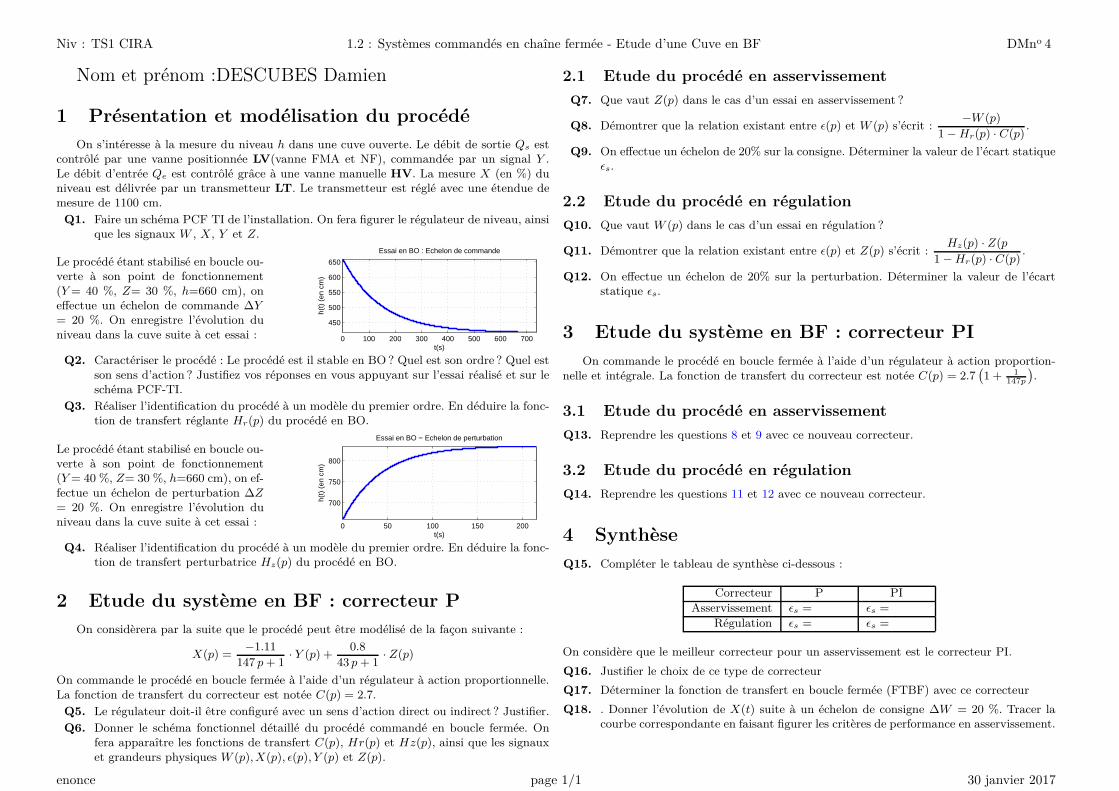
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 30 %, h=660 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600 700
450
500
550
600
650
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 30 %, h=660 cm), on ef-fectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200
700
750
800
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −1.11147 p + 1
· Y (p) + 0.843 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.7.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.7(1 + 1
147p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :DIONISIO Nicolas
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1700 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
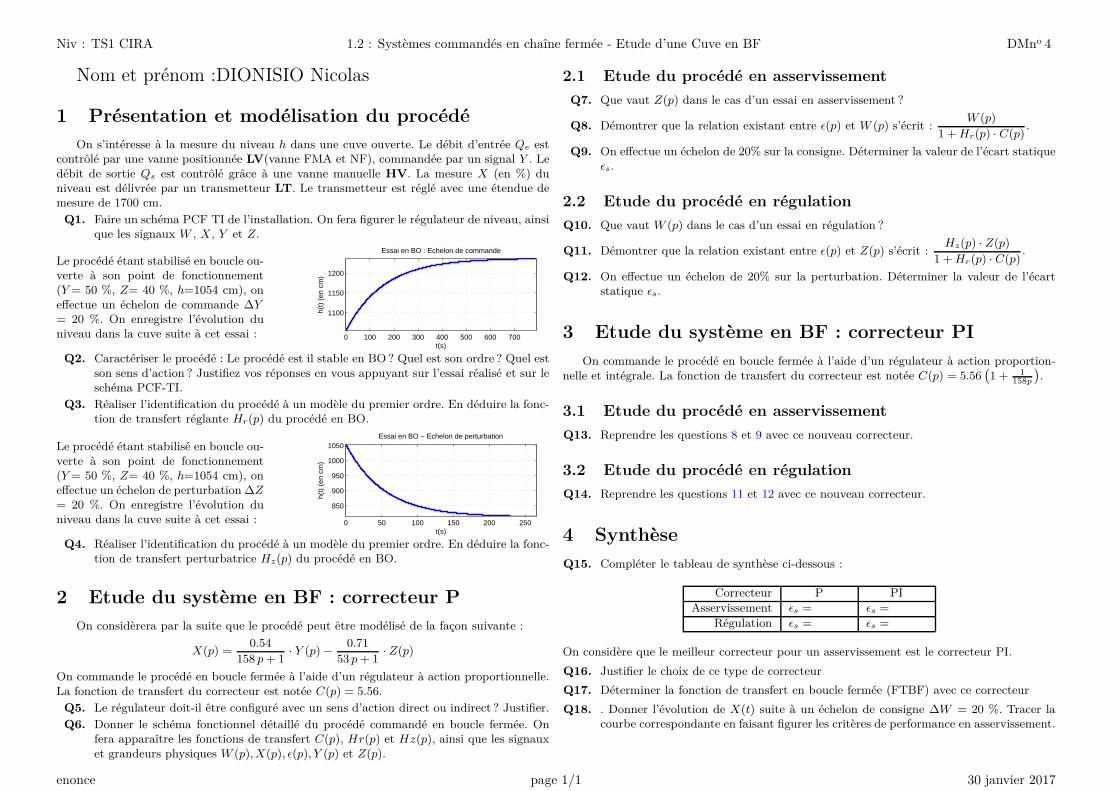
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 40 %, h=1054 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600 700
1100
1150
1200
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 40 %, h=1054 cm), oneffectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250
850
900
950
1000
1050Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 0.54158 p + 1
· Y (p) − 0.7153 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 5.56.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 5.56(1 + 1
158p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017

Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :DUPERRAY Baptiste
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1400 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 30 %, h=294 cm), oneffectue un échelon de commande ∆Y= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 100 200 300 400 500 600 700 800
240
260
280
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 30 %, h=294 cm), on ef-fectue un échelon de perturbation ∆Z= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 50 100 150 200 250 300
300
320
340
360
380Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −0.86173 p + 1
· Y (p) + 1.2566 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 3.49.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 5% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 5% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 3.49(1 + 1
173p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 5 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :DUPORT-PASQUELIN Jordan
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1000 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
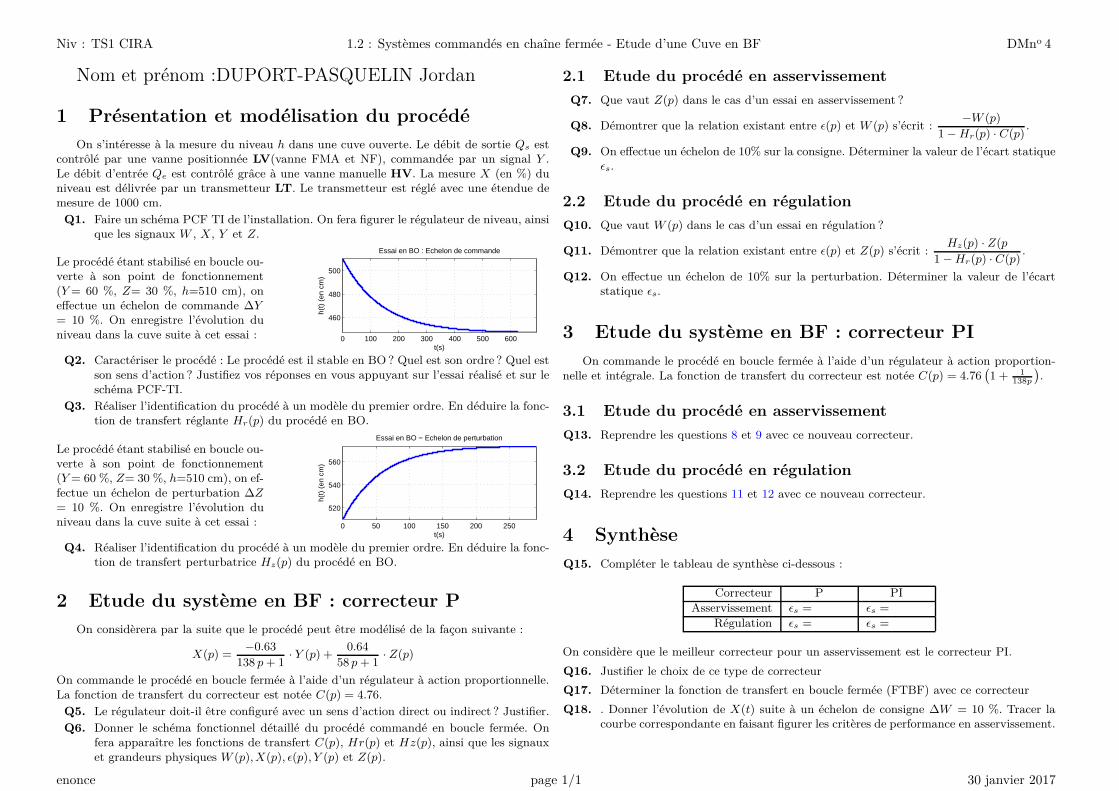
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 30 %, h=510 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600
460
480
500
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 30 %, h=510 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250
520
540
560
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −0.63138 p + 1
· Y (p) + 0.6458 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 4.76.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 4.76(1 + 1
138p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :HADIDI Djalal
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une pompe volumétrique P. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1300 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
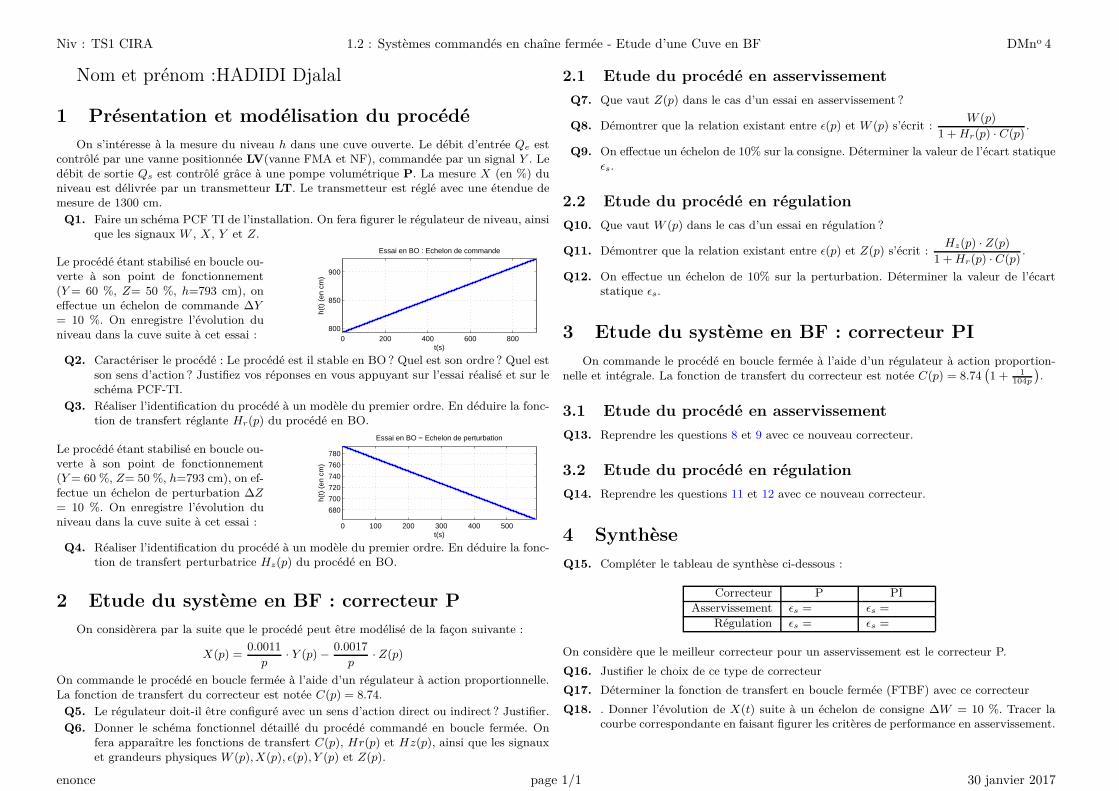
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 50 %, h=793 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 200 400 600 800
800
850
900
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 50 %, h=793 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500
680
700
720
740
760
780
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 0.0011p
· Y (p) − 0.0017p
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 8.74.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 8.74(1 + 1
104p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur P.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :HAMCHAOUI Yacine
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne OMA et NO), commandée par un signal Y .Le débit de sortie Qs est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 900 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
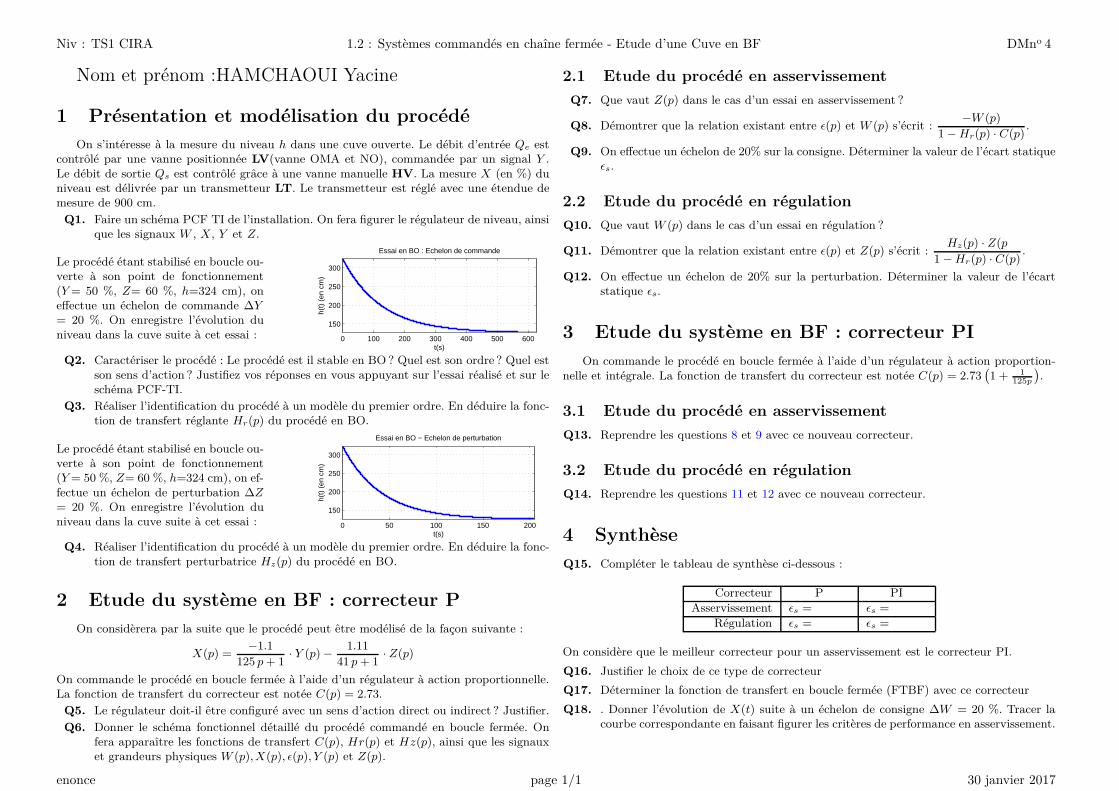
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 60 %, h=324 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600
150
200
250
300
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 60 %, h=324 cm), on ef-fectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200
150
200
250
300
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −1.1125 p + 1
· Y (p) − 1.1141 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.73.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.73(1 + 1
125p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :KHEROUNI Ryan
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une pompe volumétrique P. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 900 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
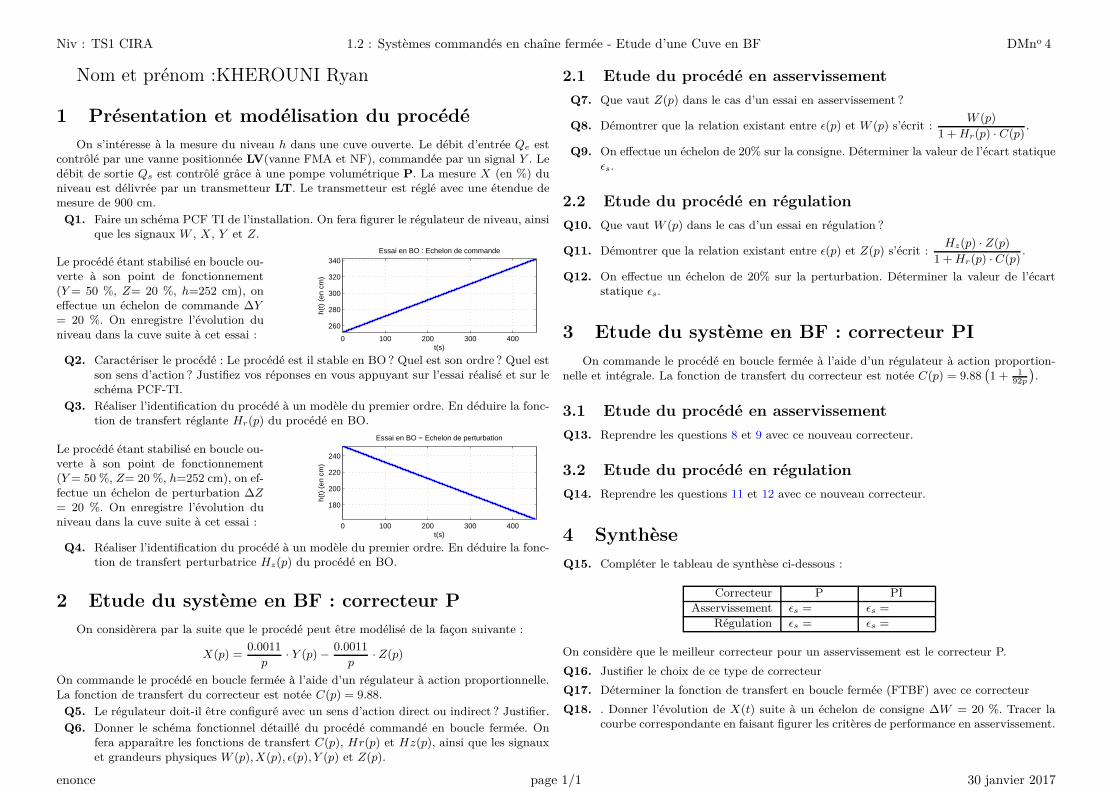
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 20 %, h=252 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400
260
280
300
320
340Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 20 %, h=252 cm), on ef-fectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400
180
200
220
240
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 0.0011p
· Y (p) − 0.0011p
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 9.88.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 9.88(1 + 1
92p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur P.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017

Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :LAROUX Thomas
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1000 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 30 %, h=530 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600
480
500
520
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 30 %, h=530 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200
540
560
580
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −0.68129 p + 1
· Y (p) + 0.5942 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 4.41.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 4.41(1 + 1
129p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :LOBATO Raphaël
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une pompe volumétrique P. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1200 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
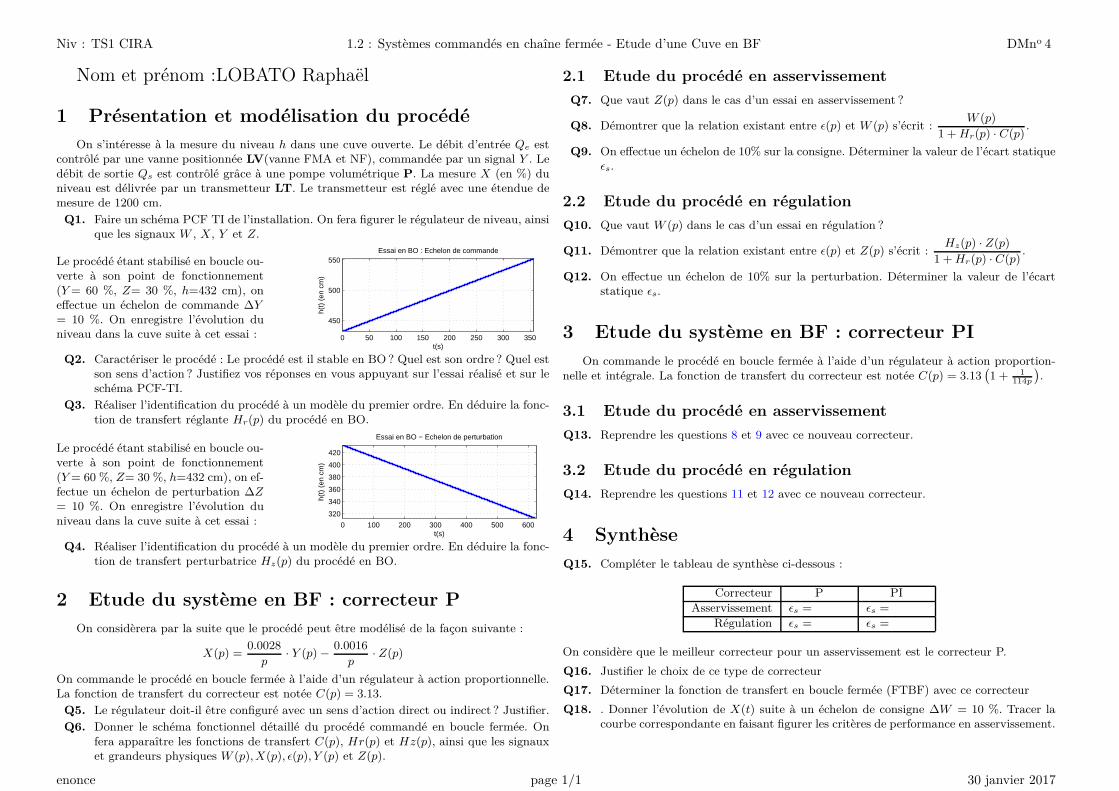
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 30 %, h=432 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250 300 350
450
500
550Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 30 %, h=432 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600
320
340
360
380
400
420
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 0.0028p
· Y (p) − 0.0016p
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 3.13.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 3.13(1 + 1
114p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur P.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :MARANDOLA Allan
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 100 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
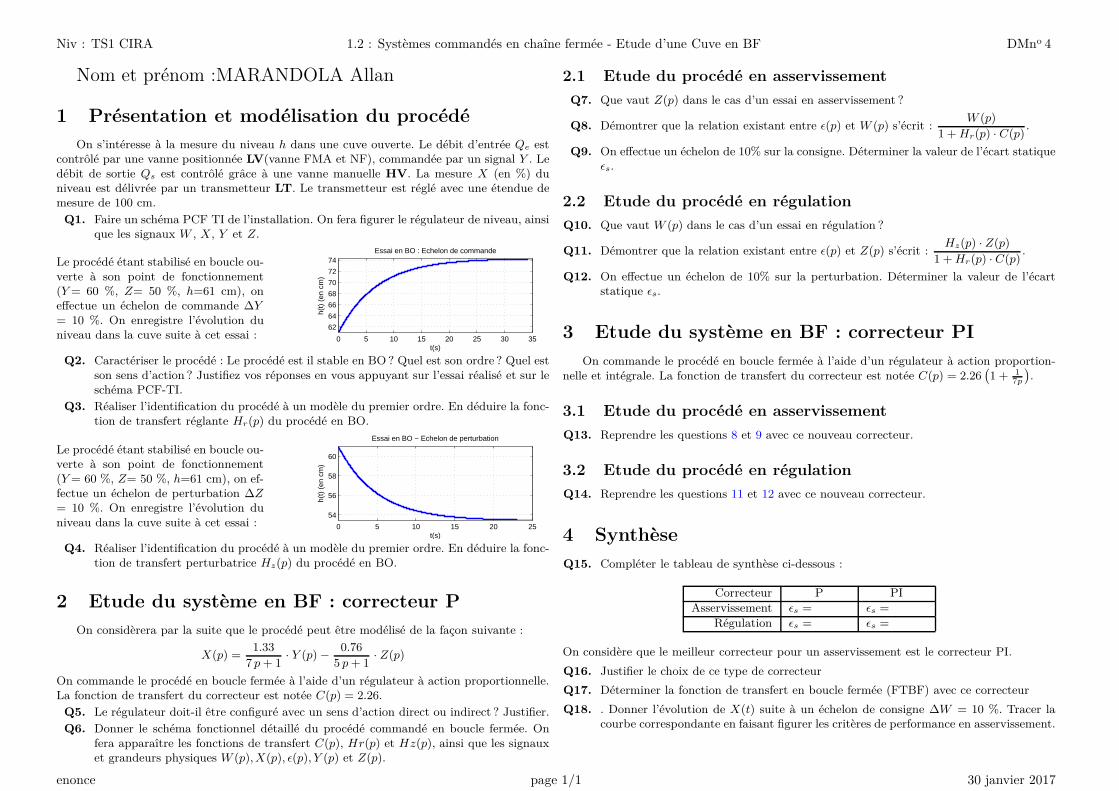
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 50 %, h=61 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 5 10 15 20 25 30 35
62
64
66
68
70
72
74Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 50 %, h=61 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 5 10 15 20 25
54
56
58
60
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 1.337 p + 1
· Y (p) − 0.765 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.26.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.26(1 + 1
7p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :MEBARKIA Ali
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 200 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
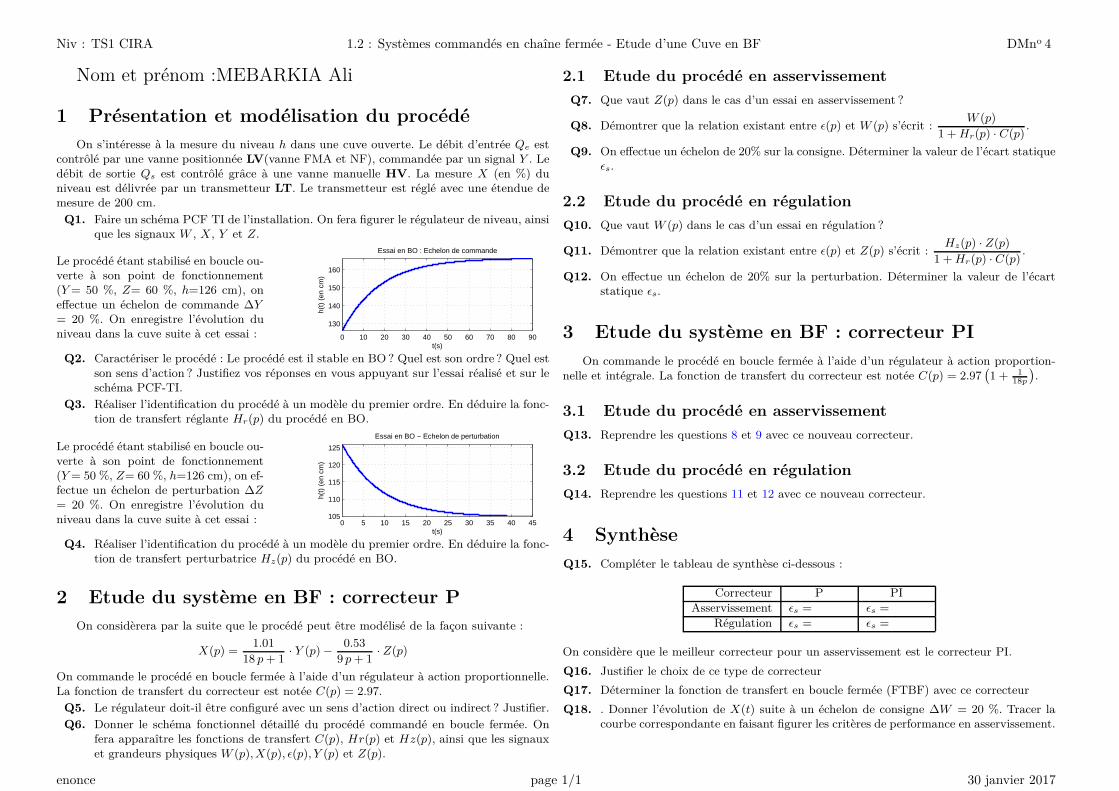
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 60 %, h=126 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 10 20 30 40 50 60 70 80 90
130
140
150
160
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
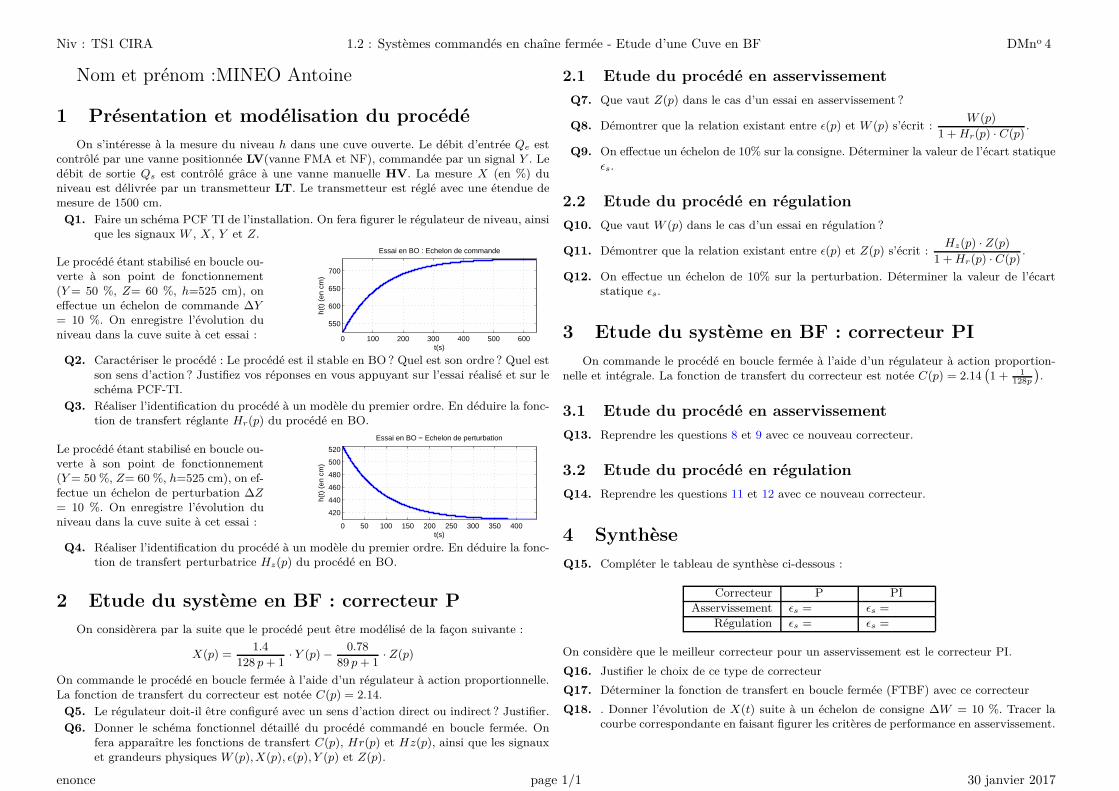
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 60 %, h=126 cm), on ef-fectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 5 10 15 20 25 30 35 40 45
105
110
115
120
125
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 1.0118 p + 1
· Y (p) − 0.539 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.97.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.97(1 + 1
18p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017

Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :MEKHERBECHE Adnane
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 700 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 60 %, h=315 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250 300
240
260
280
300
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 60 %, h=315 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 20 40 60 80 100 120
320
330
340
350
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −1.3364 p + 1 · Y (p) + 0.58
24 p + 1 · Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.26.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.26(1 + 1
64p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :MINEO Antoine
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1500 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 60 %, h=525 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600
550
600
650
700
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 60 %, h=525 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250 300 350 400
420
440
460
480
500
520
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 1.4128 p + 1
· Y (p) − 0.7889 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.14.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.14(1 + 1
128p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017

Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :MOULIS Lucas
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne OMA et NO), commandée par un signal Y .Le débit de sortie Qs est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1900 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 40 %, h=988 cm), oneffectue un échelon de commande ∆Y= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 100 200 300 400 500 600 700 800
880
900
920
940
960
980
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 40 %, h=988 cm), on ef-fectue un échelon de perturbation ∆Z= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 100 200 300 400
920
940
960
980
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −1.31172 p + 1
· Y (p) − 0.7994 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.29.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 5% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 5% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.29(1 + 1
172p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 5 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :OPERON Ludovic
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne OMA et NO), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une pompe volumétrique P. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1800 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
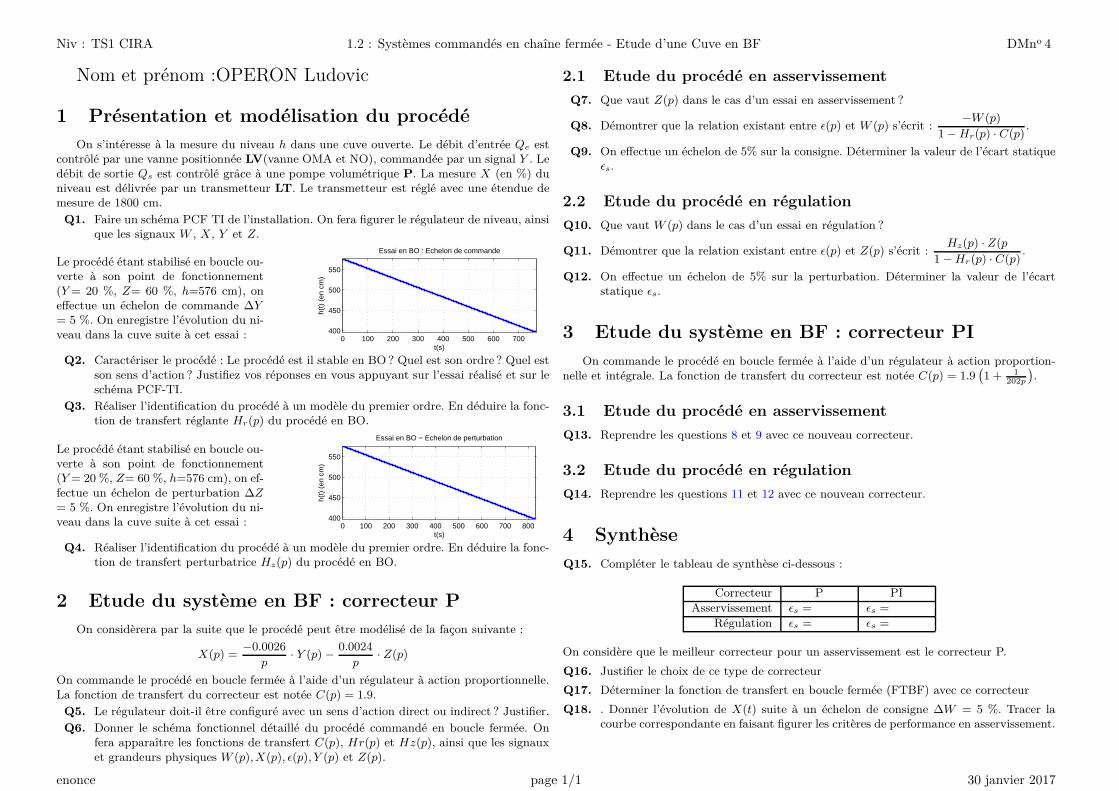
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 20 %, Z= 60 %, h=576 cm), oneffectue un échelon de commande ∆Y= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 100 200 300 400 500 600 700
400
450
500
550
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 20 %, Z= 60 %, h=576 cm), on ef-fectue un échelon de perturbation ∆Z= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 100 200 300 400 500 600 700 800
400
450
500
550
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −0.0026p
· Y (p) − 0.0024p
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 1.9.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 5% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 5% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 1.9(1 + 1
202p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur P.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 5 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
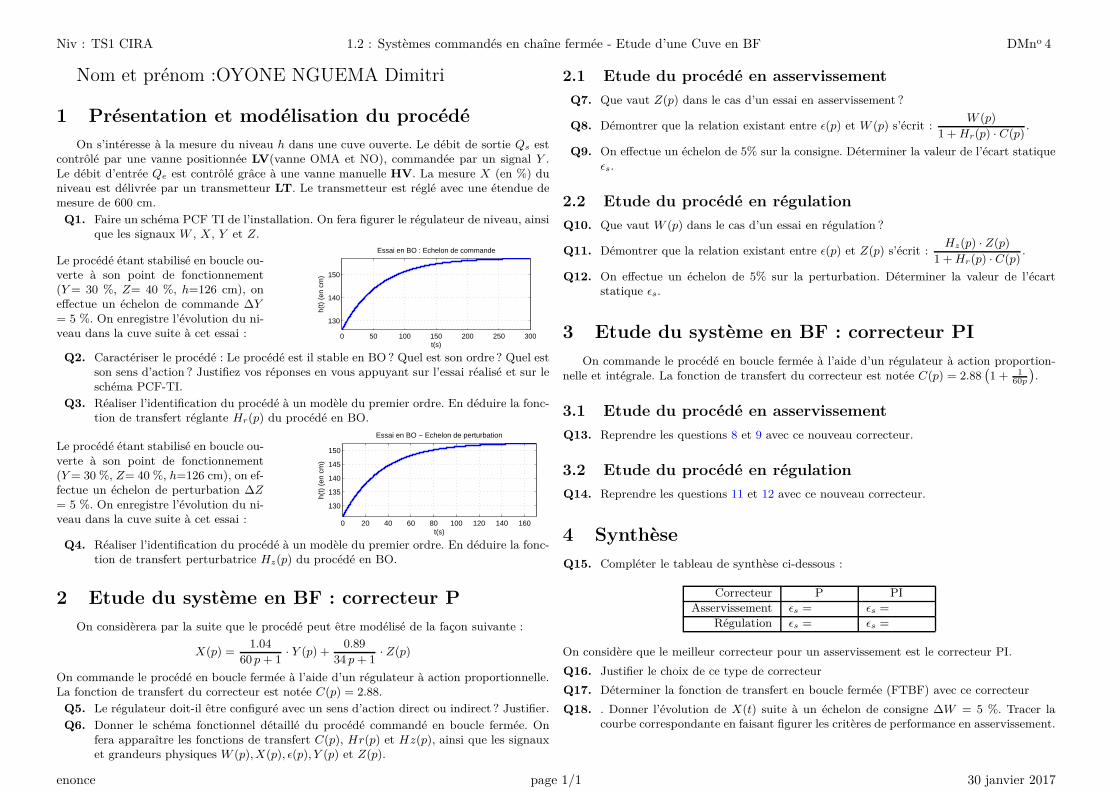
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :OYONE NGUEMA Dimitri
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne OMA et NO), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 600 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 40 %, h=126 cm), oneffectue un échelon de commande ∆Y= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 50 100 150 200 250 300
130
140
150
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 40 %, h=126 cm), on ef-fectue un échelon de perturbation ∆Z= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 20 40 60 80 100 120 140 160
130
135
140
145
150
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 1.0460 p + 1 · Y (p) + 0.89
34 p + 1 · Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.88.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 5% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 5% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.88(1 + 1
60p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 5 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
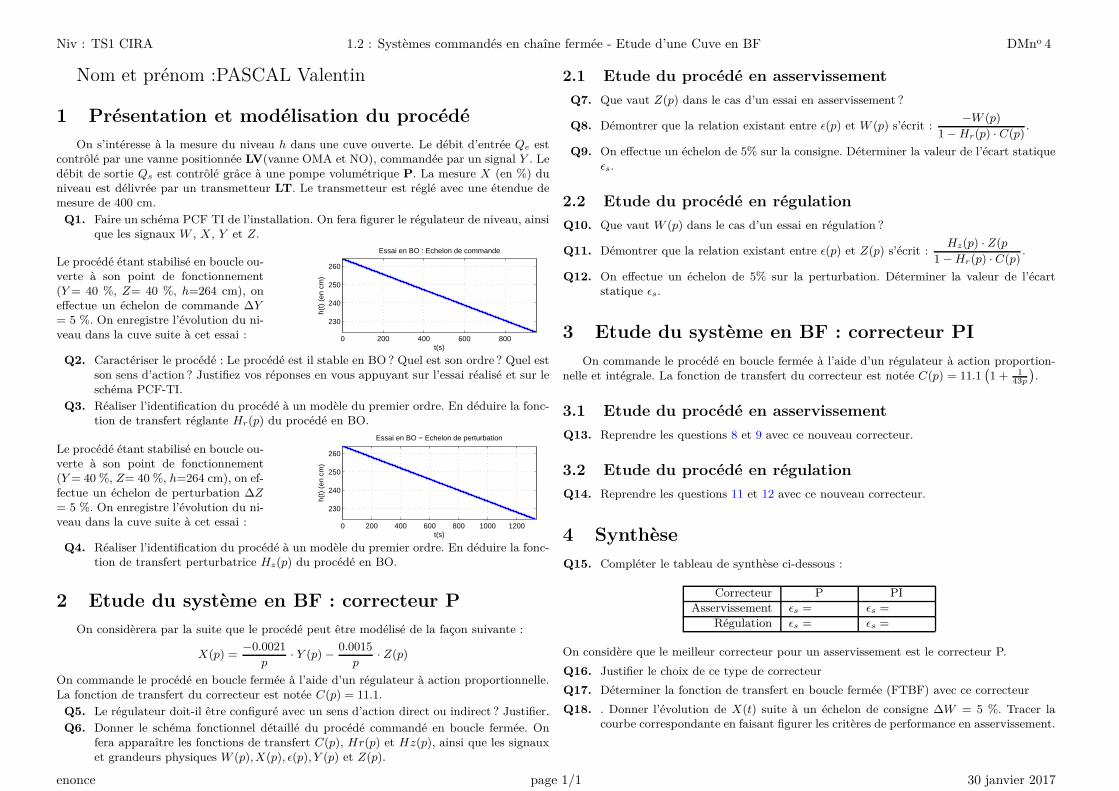
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :PASCAL Valentin
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne OMA et NO), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une pompe volumétrique P. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 400 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 40 %, h=264 cm), oneffectue un échelon de commande ∆Y= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 200 400 600 800
230
240
250
260
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 40 %, h=264 cm), on ef-fectue un échelon de perturbation ∆Z= 5 %. On enregistre l’évolution du ni-veau dans la cuve suite à cet essai : 0 200 400 600 800 1000 1200
230
240
250
260
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −0.0021p
· Y (p) − 0.0015p
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 11.1.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 5% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 5% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 11.1(1 + 1
43p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur P.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 5 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017

Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :PECOVEC Adrian
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 200 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 60 %, h=122 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 10 20 30 40 50 60 70 80
140
160
180Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 60 %, Z= 60 %, h=122 cm), on ef-fectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 5 10 15 20 25 30 35
90
100
110
120
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 1.4717 p + 1
· Y (p) − 1.027 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.04.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.04(1 + 1
17p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017

Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :PERIER Alexandre
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1100 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 20 %, Z= 60 %, h=594 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600
450
500
550
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 20 %, Z= 60 %, h=594 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200
600
620
640
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −1.41133 p + 1
· Y (p) + 0.5442 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.13.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.13(1 + 1
133p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
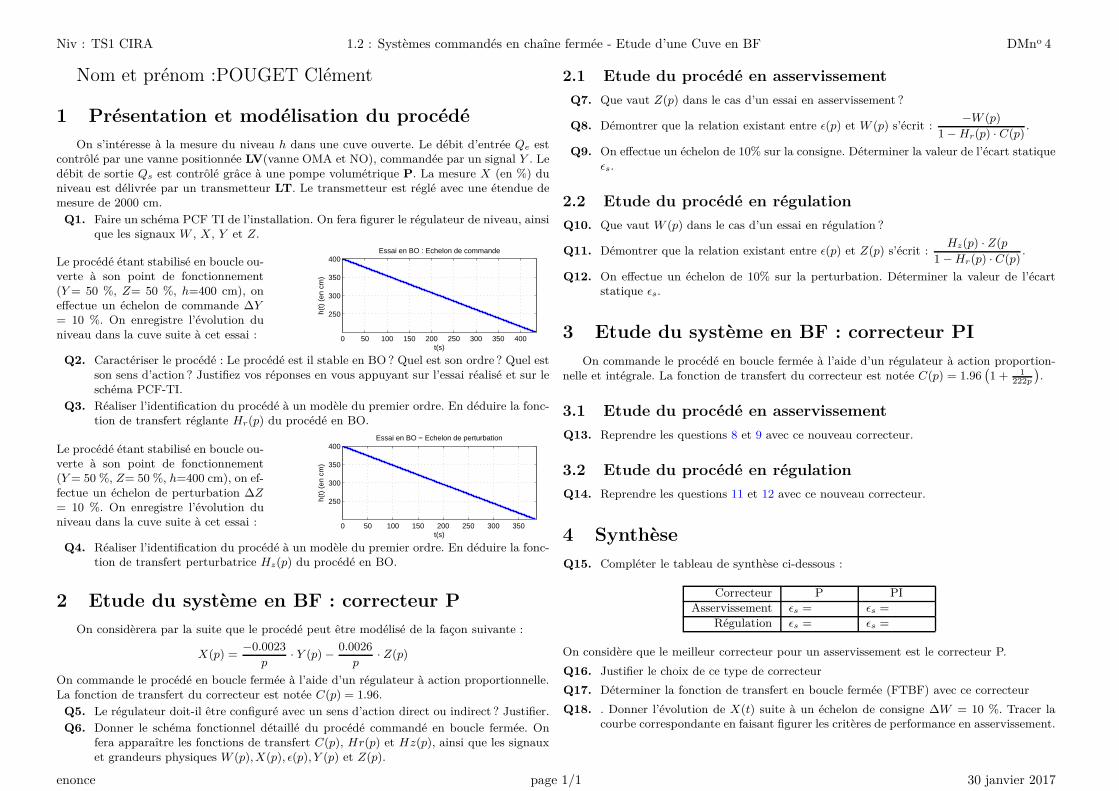
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :POUGET Clément
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne OMA et NO), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une pompe volumétrique P. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 2000 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 50 %, h=400 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250 300 350 400
250
300
350
400Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 50 %, Z= 50 %, h=400 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250 300 350
250
300
350
400Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = −0.0023p
· Y (p) − 0.0026p
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 1.96.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : −W (p)1 − Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p1 − Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 1.96(1 + 1
222p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur P.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
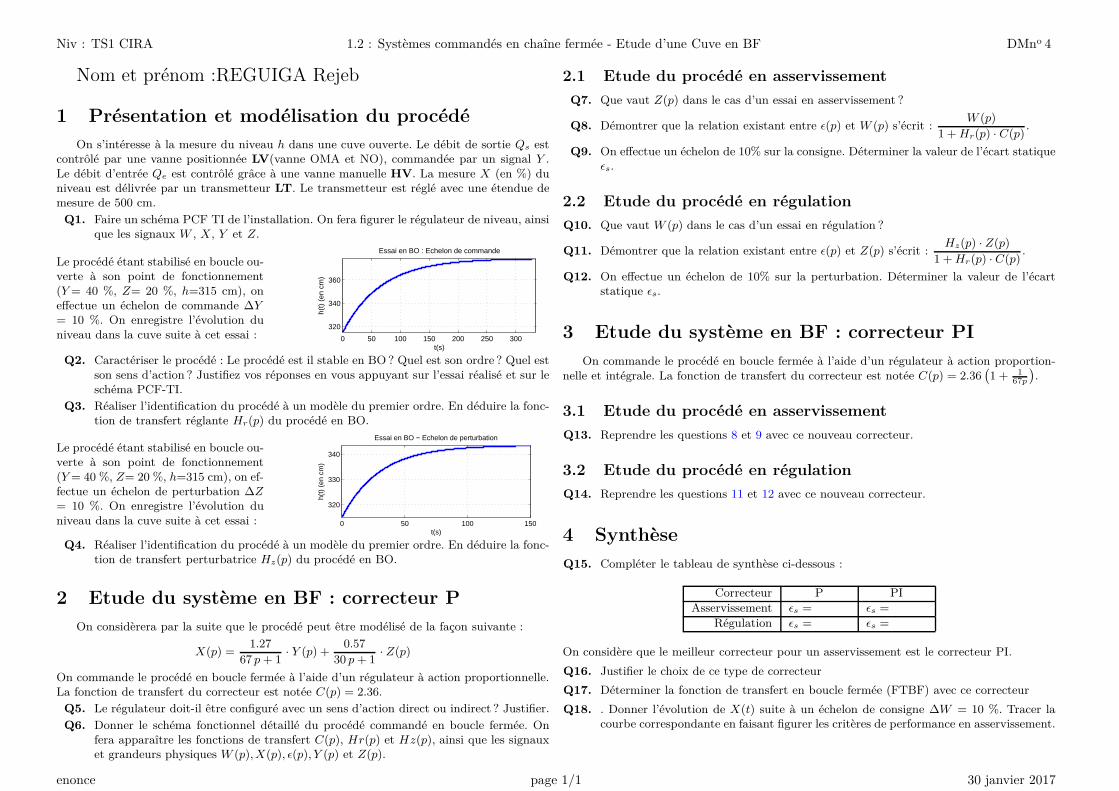
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :REGUIGA Rejeb
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit de sortie Qs est
contrôlé par une vanne positionnée LV(vanne OMA et NO), commandée par un signal Y .Le débit d’entrée Qe est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 500 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 20 %, h=315 cm), oneffectue un échelon de commande ∆Y= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150 200 250 300
320
340
360
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 40 %, Z= 20 %, h=315 cm), on ef-fectue un échelon de perturbation ∆Z= 10 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 50 100 150
320
330
340
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 1.2767 p + 1 · Y (p) + 0.57
30 p + 1 · Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.36.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 10% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 10% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.36(1 + 1
67p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 10 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017
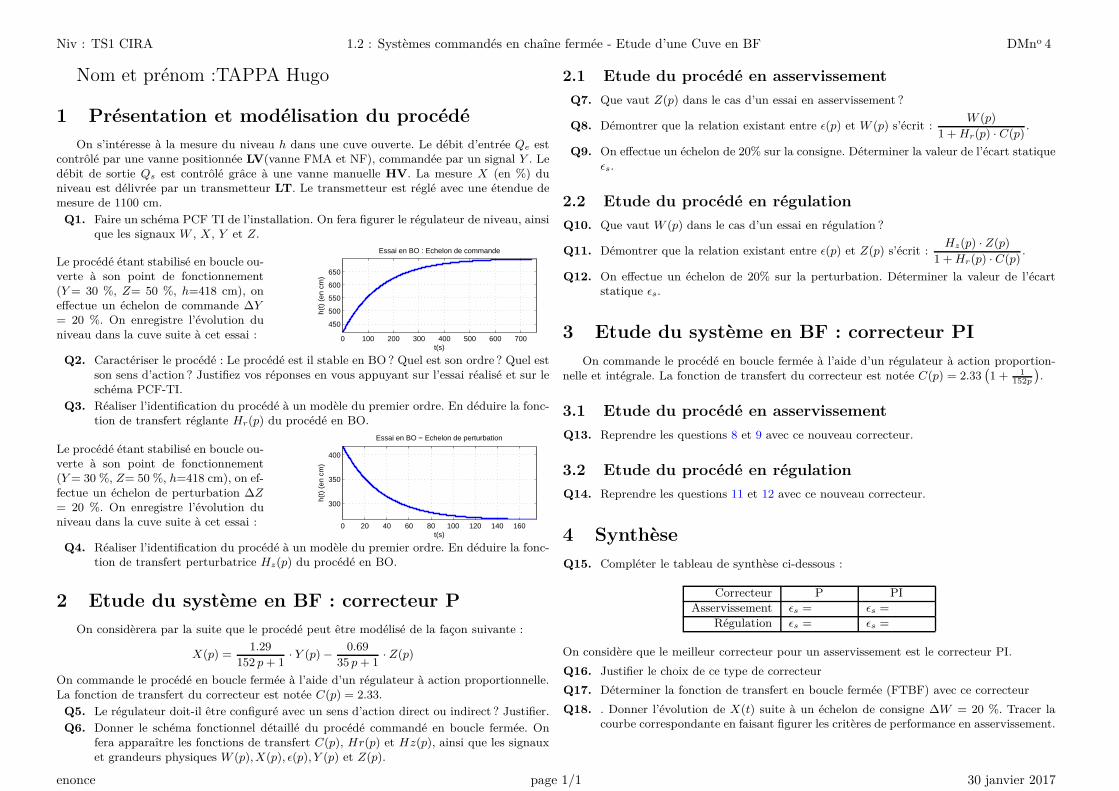
Niv : TS1 CIRA 1.2 : Systèmes commandés en chaîne fermée - Etude d’une Cuve en BF DMno 4
Nom et prénom :TAPPA Hugo
1 Présentation et modélisation du procédéOn s’intéresse à la mesure du niveau h dans une cuve ouverte. Le débit d’entrée Qe est
contrôlé par une vanne positionnée LV(vanne FMA et NF), commandée par un signal Y . Ledébit de sortie Qs est contrôlé grâce à une vanne manuelle HV. La mesure X (en %) duniveau est délivrée par un transmetteur LT. Le transmetteur est réglé avec une étendue demesure de 1100 cm.
Q1. Faire un schéma PCF TI de l’installation. On fera figurer le régulateur de niveau, ainsique les signaux W , X, Y et Z.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 50 %, h=418 cm), oneffectue un échelon de commande ∆Y= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 100 200 300 400 500 600 700
450
500
550
600
650
Essai en BO : Echelon de commande
t(s)
h(t)
(en
cm
)
Q2. Caractériser le procédé : Le procédé est il stable en BO ? Quel est son ordre ? Quel estson sens d’action ? Justifiez vos réponses en vous appuyant sur l’essai réalisé et sur leschéma PCF-TI.
Q3. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert réglante Hr(p) du procédé en BO.
Le procédé étant stabilisé en boucle ou-verte à son point de fonctionnement(Y = 30 %, Z= 50 %, h=418 cm), on ef-fectue un échelon de perturbation ∆Z= 20 %. On enregistre l’évolution duniveau dans la cuve suite à cet essai : 0 20 40 60 80 100 120 140 160
300
350
400
Essai en BO − Echelon de perturbation
t(s)
h(t)
(en
cm
)
Q4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonc-tion de transfert perturbatrice Hz(p) du procédé en BO.
2 Etude du système en BF : correcteur POn considèrera par la suite que le procédé peut être modélisé de la façon suivante :
X(p) = 1.29152 p + 1
· Y (p) − 0.6935 p + 1
· Z(p)
On commande le procédé en boucle fermée à l’aide d’un régulateur à action proportionnelle.La fonction de transfert du correcteur est notée C(p) = 2.33.
Q5. Le régulateur doit-il être configuré avec un sens d’action direct ou indirect ? Justifier.Q6. Donner le schéma fonctionnel détaillé du procédé commandé en boucle fermée. On
fera apparaître les fonctions de transfert C(p), Hr(p) et Hz(p), ainsi que les signauxet grandeurs physiques W (p), X(p), ε(p), Y (p) et Z(p).
2.1 Etude du procédé en asservissementQ7. Que vaut Z(p) dans le cas d’un essai en asservissement ?
Q8. Démontrer que la relation existant entre ε(p) et W (p) s’écrit : W (p)1 + Hr(p) · C(p) .
Q9. On effectue un échelon de 20% sur la consigne. Déterminer la valeur de l’écart statiqueεs.
2.2 Etude du procédé en régulationQ10. Que vaut W (p) dans le cas d’un essai en régulation ?
Q11. Démontrer que la relation existant entre ε(p) et Z(p) s’écrit : Hz(p) · Z(p)1 + Hr(p) · C(p)
.
Q12. On effectue un échelon de 20% sur la perturbation. Déterminer la valeur de l’écartstatique εs.
3 Etude du système en BF : correcteur PIOn commande le procédé en boucle fermée à l’aide d’un régulateur à action proportion-
nelle et intégrale. La fonction de transfert du correcteur est notée C(p) = 2.33(1 + 1
152p
).
3.1 Etude du procédé en asservissementQ13. Reprendre les questions 8 et 9 avec ce nouveau correcteur.
3.2 Etude du procédé en régulationQ14. Reprendre les questions 11 et 12 avec ce nouveau correcteur.
4 SynthèseQ15. Compléter le tableau de synthèse ci-dessous :
Correcteur P PIAsservissement εs = εs =
Régulation εs = εs =
On considère que le meilleur correcteur pour un asservissement est le correcteur PI.Q16. Justifier le choix de ce type de correcteurQ17. Déterminer la fonction de transfert en boucle fermée (FTBF) avec ce correcteurQ18. . Donner l’évolution de X(t) suite à un échelon de consigne ∆W = 20 %. Tracer la
courbe correspondante en faisant figurer les critères de performance en asservissement.
enonce page 1/1 30 janvier 2017





























