Embed Size (px)
Citation preview

Université de Versailles-Saint QuentinLicence de Sciences Economiques et Sociales - 1ière Année 2014/2015Mathématiques 1 - LEECO108 Semestre 1Ch. Poirier
Notes de Cours : Analyse et Introduction àl’Algèbre Linéaire
1 Quelques rappels sur les pourcentages
Voir cours ci-joint
2 Fonctions numériques de la variable réelle
2.1 Se repérer à l’aide des mathématiques
Pour se repérer, les scientifiques utilisent des nombres. Parmi les nombres que vousconnaissez, il y a :• Les plus simples, qui sont les entiers naturels 0, 1, 2, ..10, .... L’ensemble des entiersnaturels est noté N,• Les entiers positifs (c’est-à-dire naturels) et les entiers négatifs qui forment l’ensembledes entiers relatifs noté Z,• Les décimaux, qui ont une partie décimale finie. On peut définir mathématiquementl’ensemble des décimaux, noté D comme suit :
D = {a× 10p tel que a ∈ ZZ, p ∈ ZZ}.
Exemple : 3, 415 = 3415×10−3 est un décimal, −0, 063 = −63×10−3 ∈ D.1
3= 0, 333333....
n’est pas un décimal. Cependant c’est un rationnel. • Les nombres rationnels qui parconstruction sont les quotients des entiers relatifs. L’ensemble des rationnels est noté IQ.
IQ = {pq
tq. p et q ∈ Z et q 6= 0 }.
Les rationnels sont donc des nombres dont la partie décimale peut être infinie. Cependant,on peut montrer qu’un nombre est un rationnel si et seulement si sa partie décimale estcyclique.
Exemple : 3, 4 = 0, 75 ∈ IQ, 1 =5
5∈ IQ,
9
7= 1, 2857 142857
︸ ︷︷ ︸
partie cyclique
142857 142857 142857..... ∈ IQ.
1

• Enfin, il y a l’ensemble R des nombres réels, qui contient N, Z, l’ensemble des rationnelset beaucoup d’autres appelés nombres irrationnels (qui ne sont pas rationnels), comme
√2
ou Π.
On a les inclusions suivantes : IN ⊂ ZZ ⊂ D ⊂ IQ ⊂ IR.
Pour se repérer sur une droite, à chaque point P de la droite, on peut associer un nombreréel r, appelé abscisse du point P . On repère le point appelé origine et noté 0 par sonabscisse nul. (cf. figure 1)
Pour repérer un point dans un plan, on construit deux droites perpendiculaires du plan,appelées les deux axes du repère. L’origine 0 est placée à l’intersection des deux droites.Chaque point P du plan est repéré par un couple de réels (a, b), appelé coordonnées dupoint P . x s’appelle l’abcsisse du point P et y son ordonnée. Voir figure 2.L’axe des abscisses est l’ensemble des points dont l’ordonnée est nulle.L’axe des ordonnées est l’ensemble des points dont l’abscisse est nulle.
Exemples : Représenter les deux ensembles suivants : A = {P (x, y) tq. x = 1} etB = {P (x, y) tq. y = 2}. Le seul point qui est à la fois dans les deux ensembles, a pourcoordonnée (1, 2). On écrit : {C(1, 2)} = A ∩ B.
La dernière généralisation que nous allons faire concerne le repérage dans l’espace.Pour se repérer dans l’espace, on construit un plan et une droite perpendiculaire au plan.On associe à chaque point P de l’espace trois nombres réels, c’est-à-dire un triplet de réels,(x, y, z) de la façon suivante (cf. figure 3.). Les coordonnées (x, y) sont les coordonnées dupoint M , projeté du point P sur le plan (perpendiculairement au plan). Le réel z appeléla cote de P correspond à l’altitude du point P par rapport au plan.
2
2.2 Rappel sur les intervalles
Soient a et b deux réels tels que a < b, on note :• ]a, b[ l’ensemble des nombres réels tels que a < x < b,• ]a, b] l’ensemble des nombres réels tels que a < x ≤ b,• [a, b[ l’ensemble des nombres réels tels que a ≤ x < b,• [−∞, b[ l’ensemble des nombres réels tels que x < b,• ]−∞, b] l’ensemble des nombres réels tels que a < x ≤ b,• ]a,+∞[ l’ensemble des nombres réels tels que a < x,• [a,+∞[ l’ensemble des nombres réels tels que a ≤ x,• ]−∞,+∞[ = R.• R⋆ l’ensemble des réels non nuls. Cet ensemble n’est pas un intervalle.• Les intervalles de la forme ]a,+∞[, ]a, b[, ] − ∞, b[, ] − ∞,+∞[= IR sont appelésintervalles ouverts.
2.3 Notion d’une fonction numérique d’une variable réelle
Définition 2.1. Une fonction f d’une variable réelle est une relation qui à chaque valeurréelle x associe au plus une valeur notée f(x). Lorsque cette valeur f(x) existe, on l’appellel’image par f de x.L’ensemble des nombres réels x auxquels correspondent une valeur f(x) s’appelle le do-maine de définition de f . On le note Df . C’est une partie de R.
Exemple 2.1. Soit la fonction f définie par f(x) = 1− x. Le domaine de définition de fest R car pour chaque réel x, on peut calculer le réel 1− x.
Soit la fonction g définie par f(x) =2
x. Comme on ne peut pas diviser par 0, si le réel x
vaut 0 on ne peut pas calculer g(x). Mais lorsque x n’est pas nul, on peut calculer g(x).Le domaine de définition de g est donc R\{0} = R
⋆.
Définition 2.2. Le graphe d’une fonction f appelé aussi représentation graphique de fest l’ensemble des points du plan de coordonnées (x, f(x)), lorsque x parcourt Df .
Exemples et Contre-exemples de fonctions : faire différentes courbes (cf. p7) et le casdu cercle, qui n’est pas la courbe d’une fonction ou aussi une marche (cf. p8).
3

Définition 2.3. Soit f une fonction définie sur un intervalle I de IR.f est dite croissante sur I si ∀x1, x2 tq. x1 ≤ x2, f(x1) ≤ f(x2).f est dite strictement croissante sur I si ∀x1, x2 tq. x1 ≤ x2, f(x1) < f(x2).
Lorsque x augmente, f(x) augmente.On définit de même une fonction décroissante.
Définition 2.4. Soit f une fonction. Si x appartient au domaine de définition de f et sif(x) = 0, on dit que x est un zéro de f .
Les zéros de f correspondent aux abscisses des points d’intersection du graphe de favec l’axe des abscisses.
2.4 Cas des fonctions continues sur un intervalle I
Théorème 2.1. dit des valeurs intermédiaires
Soit f une fonction numérique continue sur [a, b]. Alors toutes les valeurs comprisesentre f(a) et f(b) sont au moins une fois image d’un élément de [a, b].Autrement dit, si f(a) ≤ k ≤ f(b) (ou f(b) ≤ k ≤ f(a)) alors il existe c ∈ [a, b]tel que k = f(c).
b
f(a)
0
k
f(b)
(D)
a
dont l’abscisse est comprise entre a et b.
(Cf )
La droite d’équation y = k coupe la courbe Cf en au mois un point,
Exercice 1. Soit f la fonction définie de IR dans IR par f(x) = 3x3 − 20x+ 10, ∀x ∈ IR.a) - Montrer qu’il existe au moins un réel c ∈ [0, 1] tel que f(c) = 0.b) - Montrer qu’il existe au moins un réel d ∈ IR⋆− tel que f(d) = 0.
Corollaire 2.1. Soit f une fonction continue sur [a, b] telle que f(a) et f(b) sont de signecontraire. Alors il existe c ∈ [a, b] tel que f(c) = 0.
Preuve. Si f(a) et f(b) sont de signe contraire alors f(a) ≤ 0 ≤ f(b) (ou f(b) ≤ 0 ≤f(a)) donc il existe c ∈ [a, b] tel que 0 = f(c).
4
Théorème 2.2. et Définition
Si f est une fonction numérique continue et strictement croissante sur [a, b],alors tout élément y ∈ [f(a), f(b)] admet un unique antécédent dans [a, b] par f .On dit alors que f est une application bijective de [a, b] sur [f(a), f(b)].L’application réciproque de f est alors l’application de [f(a), f(b)] dans [a, b],qui à chaque réel y ∈ [f(a), f(b)] associe son unique antécédent x ∈ [a, b] par f .L’application réciproque de f est alors continue et strictement croissante sur [f(a), f(b)].
On a le même résultat, si f est strictement décroissante, en remplaçant [f(a), f(b)] par[f(b), f(a)].
Graphe de la réciproque de f
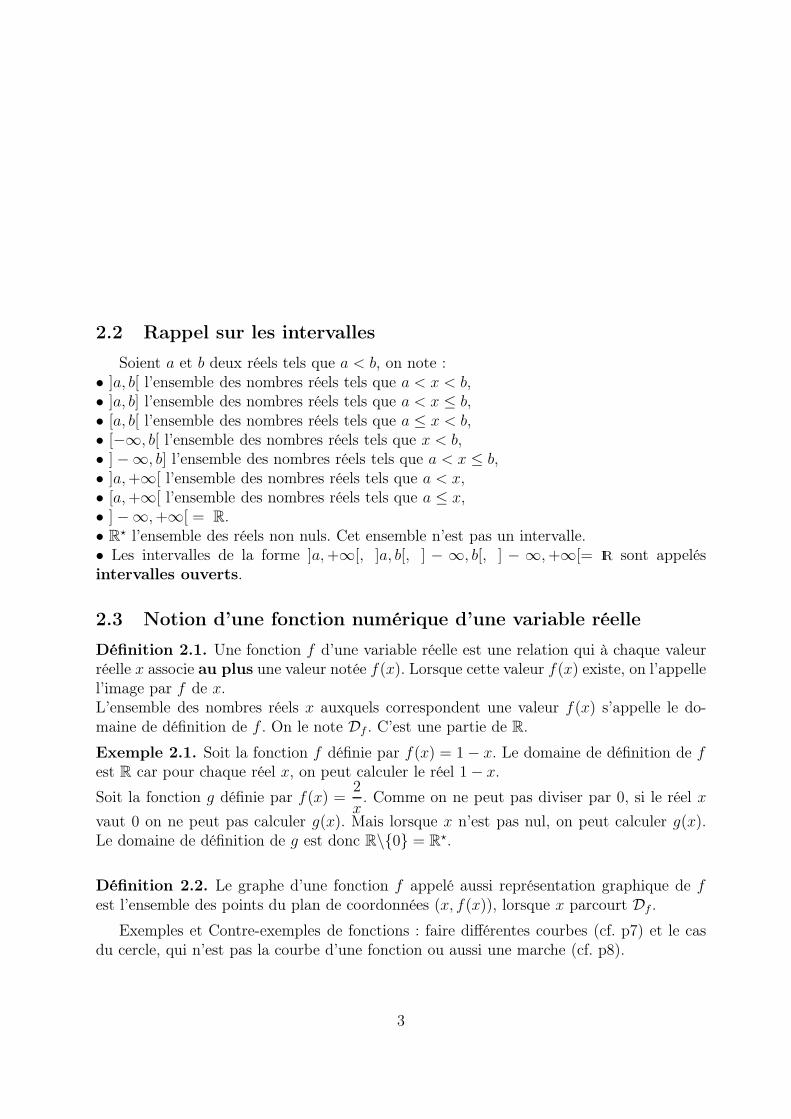
Si f et g sont réciproques l’une de l’autre alors dans un repère orthonormé, la courbereprésentative Cg de g est le symétrique orthogonal par rapport à la première bissectrice
( : la droite d’équation y = x) de la courbe représentative Cf de f .
Preuve. On note g la réciproque de l’application bijective f . Soit Cf := {(x, f(x)), tq. x ∈[a, b]} la courbe représentative de f et Cg celle de g.
x ∈ [a, b] f(x) = y ⇐⇒ y ∈ [f(a), f(b)] x = g(y).Donc (x, y) ∈ Cf ⇐⇒ (y, x) ∈ Cg.Donc Cf et Cg sont symétriques par rapport à la droite d’équation y = x.
1
2
3
−1
−2
−3
−4
−5
1 2 3 4 5 6−1−2−3−4−5
Cf
Cg
y = x
f et g sont réciproques l’une de l’autre
Théorème 2.3. Extension :Si f est continue et strictement croissante sur [a, b[ (avec a ∈ IR et b ∈ IR), alors f estbijective de [a, b[ sur [f(a), l[ où l = lim
x→b−f(x) ∈ IR.
5

Si f est continue et strictement croissante sur ]a, b[ (avec a ∈ IR et b ∈ IR), alors f estbijective de ]a, b[ sur [l′, l[ où l = lim
x→b−f(x) ∈ IR et l′ = lim
x→a+f(x) ∈ IR.
On obtient des résultats similaires si f est strictement décroissante ou si on considère desintervalles de la forme ]b, a] (avec a ∈ IR et b ∈ IR).
2.5 Fonctions Affines ou Linéaires
Définition 2.5. Soient a et b deux réels. La fonction f : x→ ax+ b est appelée fonctionaffine.Dans le cas particulier où b = 0, la fonction f est appelée fonction linéaire.Dans le cas particulier où a = 0, la fonction f est appelée fonction constante.
Propriété 2.1. Si a > 0, la fonction affine est strictement croissante.Si a < 0, la fonction affine est strictement décroissante.Le graphe d’une fonction affine est une droite, de pente a et d’ordonnée b à l’origne(f(0) = b).Si f est une fonction affine dont le graphe passe par les points A(xA, yA) et B(xB, yB) alors
a =f(xB)− f(xA)
xB − xA.
1
2
3
4
5
6
−1
−2
−3
1 2 3 4 5 6 7−1−2−3−4
y = ax+ b tel que
a = yB−yaxB−xA
et b = yA − axA.
bA
bB
6
2
4
6
−2
−4
2 4 6 8−2−4−6
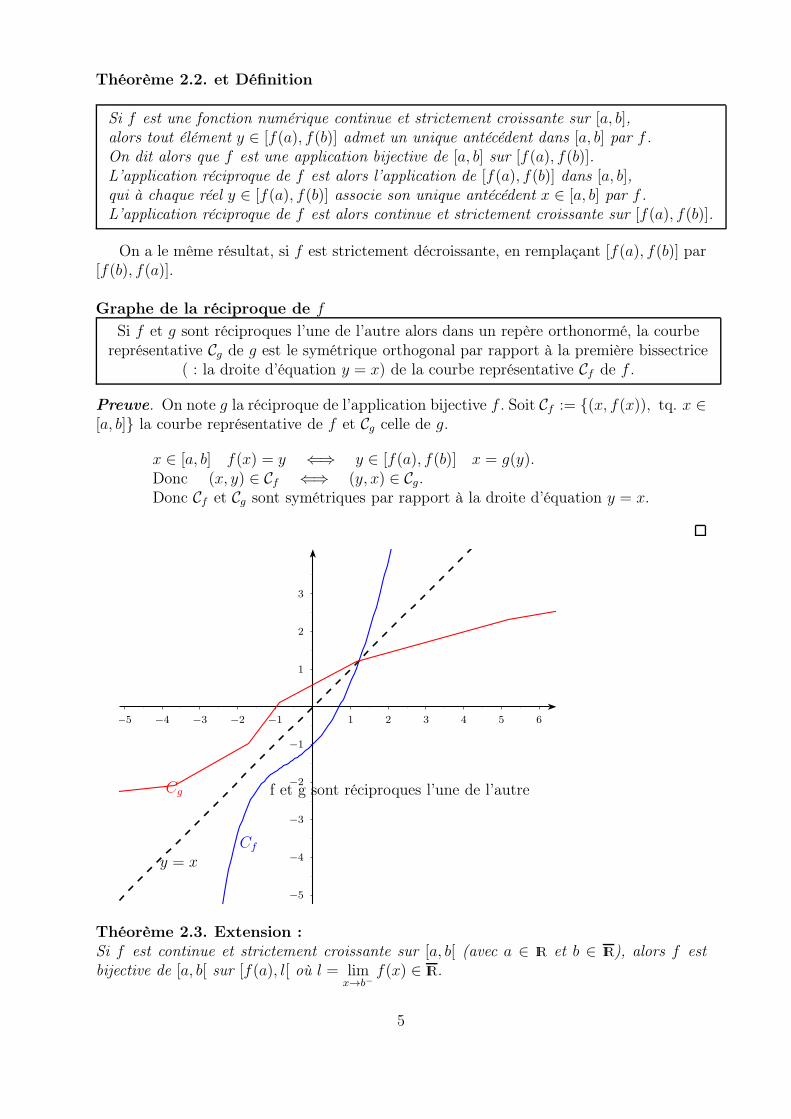
Cf : y = −3x+ 4
1
-3
Le point A(0,b) ici b=4 appartient à la droite représentant f
Le point B(1,-3+4) appartient à la droite représentant f
La droite (AB) est donc la représentation graphique de f.
bA
bB
2.6 Fonctions quadratiques
2.6.1 Identités remarquables
Pour tous réels a et b, on a les identités remarquables suivantes :
Forme factorisée Forme développée(a+ b)2 = a2 + 2ab+ b2
(a− b)2 = a2 − 2ab+ b2
(a− b)(a+ b) = a2 − b2
2.6.2 Définition et propriétés des fonctions quadratiques
cf. cours manuscrit.
2.7 La Fonction Valeur Absolue
Définition 2.6. Valeur absolue d’un réel x : |x|
Si x ≥ 0 |x| = xSi x ≤ 0 |x| = −x
Propriété 2.2. Pour tous nombre réels x et y on a :
7

i) |x| ≥ 0, −|x| ≤ x ≤ |x| et |x| > 0 ⇔ x 6= 0.
ii)√x2 = |x|.
iii) xy| = |x||y| et si x 6= 0 alors
∣∣∣∣
1
x
∣∣∣∣=
1
|x| .
iv) |x+ y| ≤ |x|+ |y| (Inégalité Triangulaire).
v) |x− y| ≥∣∣|x| − |y|
∣∣.
Propriété 2.3. Soit r un réel strictement positif. Pour tout réel x on a les équivalences.
|x| < r ⇔ −r < x < r|x| ≤ r ⇔ −r ≤ x ≤ r
Preuve. La preuve des deux propriétés est laissée en exercice.
Graphe de la fonction valeur absolue | |
x−2 −1
13
1
y
−1
2 4 50
3 Les Fonctions Puissance et Racine nième
3.1 Fonction Puissance x→ xn, lorsque n est un entier relatif
Définition 3.1. On pose :
pour tout réel x, pour tout n ∈ IN⋆, xn := x.x...x︸ ︷︷ ︸
n fois
pour tout réel x non nul, pour tout n ∈ IN⋆, x−n :=1
xn
pour tout réel x non nul, x0 := 1 par convention
3.2 Fonctions x → n√x, lorsque n ∈ IN
⋆
Soit n ∈ IN⋆. L’application puissance
{IR
+ → IR+
x → xn est une application continue
strictement croissante telle que limx→+∞
xn = +∞ et 0n = 0. Donc d’après le théorème (2.3),
l’application est bijective de [0,+∞[ sur [0,+∞[. Son application réciproque est notée n√ .
Pour tous x, y ∈ IR+, on a l’équivalence : x = n√y ⇔ xn = y.
Notation : la fonction racine nième se note aussi : n√y = y
1n .
8

Remarque 3.1. • Si n = 1 alors pour tout x ∈ IR+, 1√x = x.
• Si n = 2, on écrit√x à la place de 2
√x et on dit racine carrée de x au lieu de racine
deuxième de x.• Soit a un réel, alors
√a2 a toujours un sens et
Si a ≥ 0 alors√a2 = a,
Si a ≤ 0 alors√a2 = −a.
• Si n = 3, on dit racine cubique de x au lieu de racine troisième de x.
Attention : Le symbole n√x n’a de sens que si n ∈ IN
⋆ et si x ∈ IR+.
Exercice 2. Soit a un paramètre réel et n ∈ IN⋆. Résoudre l’équation d’inconnue réellex : x2 = a.• Cas a = 0 : x ∗ x = 0 implique x = 0. 0 est la seule solution.• Cas a < 0 : un carré n’est jamais négatif donc x2 = a n’a aucune solution. L’ensembledes solutions est dite vide.Notation : On note ∅ ou aussi {} l’ensemble vide.• Cas a > 0 : x2 = a ⇔ x2 − a = 0 ⇔ x2 − (
√a)2 = 0 ⇔ (x − √a)(x +
√a) =
0. Or un produit de facteur est nul si et seulement si l’un des facteurs est nul. Donc(x−√a)(x+
√a) = 0 ⇔ x−√a = 0 ou x+
√a = 0 ⇔ x =
√a ou x = −√a.
Retenez : Si a ≥ 0 alors x2 = a ⇔ x =√a ou x = −√a.
9
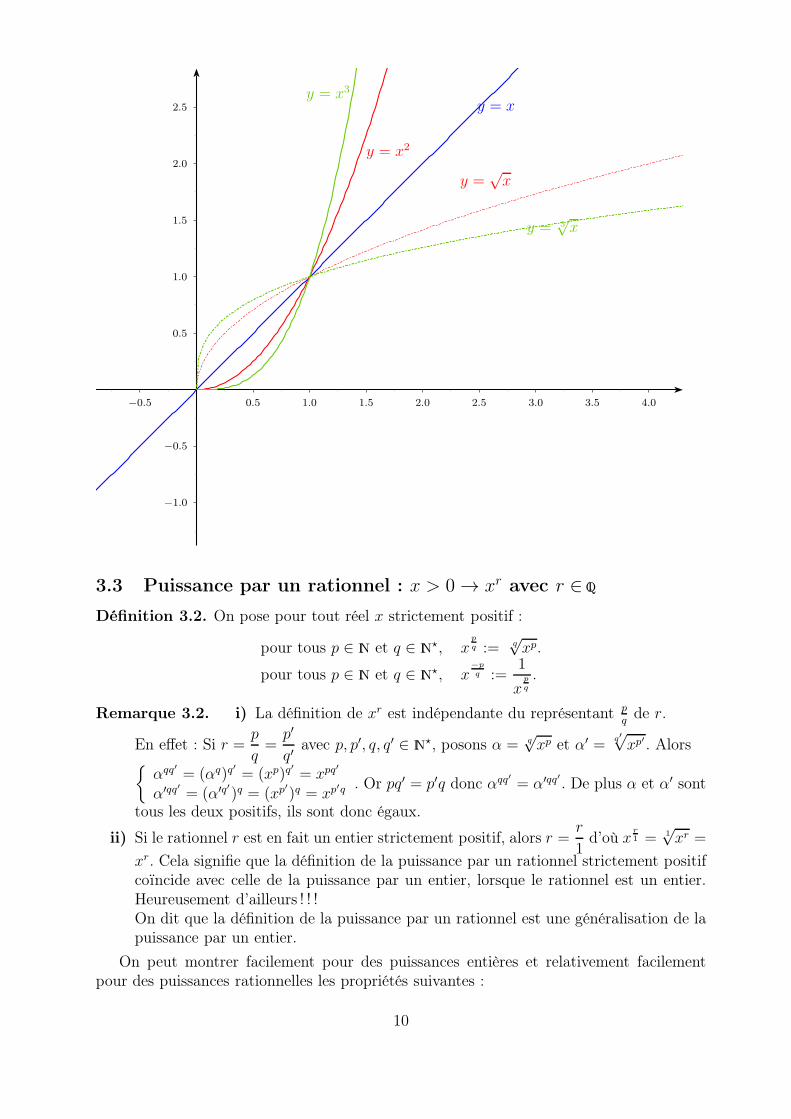
0.5
1.0
1.5
2.0
2.5
−0.5
−1.0
0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0−0.5
y =√x
y = 3√x
y = x3
y = x2
y = x
3.3 Puissance par un rationnel : x > 0→ xr avec r ∈ IQ
Définition 3.2. On pose pour tout réel x strictement positif :
pour tous p ∈ IN et q ∈ IN⋆, xpq := q
√xp.
pour tous p ∈ IN et q ∈ IN⋆, x−pq :=
1
xpq
.
Remarque 3.2. i) La définition de xr est indépendante du représentant pq
de r.
En effet : Si r =p
q=
p′
q′avec p, p′, q, q′ ∈ IN⋆, posons α = q
√xp et α′ =
q′√xp′ . Alors
{αqq′ = (αq)q
′
= (xp)q′
= xpq′
α′qq′ = (α′q′)q = (xp′)q = xp′q . Or pq′ = p′q donc αqq′ = α′qq′. De plus α et α′ sont
tous les deux positifs, ils sont donc égaux.
ii) Si le rationnel r est en fait un entier strictement positif, alors r =r
1d’où x
r1 = 1√xr =
xr. Cela signifie que la définition de la puissance par un rationnel strictement positifcoïncide avec celle de la puissance par un entier, lorsque le rationnel est un entier.Heureusement d’ailleurs ! ! !On dit que la définition de la puissance par un rationnel est une généralisation de lapuissance par un entier.
On peut montrer facilement pour des puissances entières et relativement facilementpour des puissances rationnelles les propriétés suivantes :
10

Propriété 3.1. Pour tous rationnels x et y, et tous réels strictement positifs a et b,
(I)
ax+y = ax × ay
a−x =1
ax
ax−y =ax
ay
(II)
axy = (ax)y
(ab)x = axbx
ax
bx= (
a
b)x.
3.4 Puissance par un réel
Le réel a > 0 étant fixé, on considère f :
{IQ → IR+
r → ar. Le but du paragraphe est
de prolonger f à tout réel r, c’est-à-dire définir l’expression ax même lorsque x n’est pasun rationnel.La première propriété de la proposition 3.1 s’écrit ∀x, y ∈ IQ f(x+ y) = f(x)× f(y). Onva donc chercher les fonctions f définies de IR dans IR telles que
(F) f(x+ y) = f(x)f(y) ∀x, y ∈ IR. (1)
Remarque 3.3. La fonction nulle est un exemple de fonction qui vérifie (F).Propriété 3.2. Si f est une fonction de IR dans IR vérifiant la condition (F) alors f vérifieles propriétés suivantes :• La fonction f est la fonction nulle ou f ne s’annule jamais et est toujours strictement
positive.
• Si la fonction n’est pas la fonction nulle, alors f(0) = 1 et f(−x) = 1
f(x), ∀x ∈ IR.
• On pose a = f(1) > 0. Alors f(n) = an ∀n ∈ ZZ.• f(1
2) =√a et plus généralement f( 1
n) = n√a, ∀n ∈ IN. C’est la raison pour laquelle
on écrit que a1/n := n√a.
• Enfin ∀r ∈ IQ, f(r) = ar pour tout rationnel r ∈ IQ.
Preuve. vue en cours en partie.
On peut aussi énoncer des propriétés qualitatives, à savoir :
Propriété 3.3. – Si f est continue en 0 et vérifie la condition (F) alors f est continuesur IR.
– Si f est continue sur IR et vérifie la condition (F) alors f est dérivable sur IR et sadérivée vérifie la relation :
f ′(x) = f ′(0)× f(x) ∀x ∈ IR.
Preuve. On suppose que la fonction est continue sur IR et est non-nulle, alors la fonction
G telle que G(x) =
∫ x
0
f(t)dt est dérivable sur IR et G′(x) = f(x). Or∫ 1
0f(x + t)dt =
f(x)∫ 1
0f(t)dt. En posant y = x+ t, on a
∫ 1
0f(x+ t)dt =
∫ x+1
xf(y)dy = G(x+1)−G(x).
D’où f(x) =G(x+ 1)−G(x)
G(1). La fonction G étant dérivable, la fonction f l’est aussi.
Pour calculer la dérivée, on calcule le taux c’accroissement de la fonction f en un point x :
f(x+h)−f(x)h
= f(x)f(h)−1h
= f(x)f(h)−f(0)h
.
Donc limh→0
f(x+ h)− f(x)
h= f(x)f ′(0)
11

f est donc dérivable en x et f ′(x) = f ′(0)f(x).
Nous admettrons le théorème suivant qui est difficile à montrer (preuve hors pro-gramme) et qui repose sur la propriété de IR suivante :Entre deux réels (distincts) aussi proches l’un de l’autre soient-ils, on peut toujours trouverun rationnel.
Théorème 3.1. Le réel a > 0 étant fixé, il existe une fonction unique fa continue sur IR
qui vérifie : {fa(x+ y) = fa(x)× fa(y) ∀x, y ∈ IR
fa(1) = a
On a montré que cette fonction prolongeait la fonction qui à tout rationnel r associe ar.On note alors fa(x) = ax pour tout x ∈ IR.
Propriété 3.4. Soit a > 0, la fonction puissance x→ ax vérifie les 3 propriétés du (I) dela propriété 3.1.
Remarque importante : Il n’est pas clair que les propriétés de la partie (II) soientréalisées pour a et b réels > 0 et x, y réels. Nous reviendrons sur ces propriétés, par lasuite.
3.5 La fonction exponentielle
Encore un théorème difficile à montrer et qui définit la fonction exponentielle :
Théorème 3.2. Il existe une seule fonction notée exp et appelée fonction exponentielledérivable sur IR et qui vérifie :
{exp′(x) = exp(x) ∀x ∈ IR
exp(0) = 1.(2)
Propriété 3.5.∀x, y ∈ IR, exp(x+ y) = exp(x) exp(y).
Preuve. Fixons deux réels x et y et définissons la fonction h telle que h(z) = exp(x+ y−z) exp(z), ∀z ∈ IR.h′(z) = (−1) exp′(x + y − z) exp(z) + exp(x + y − z) exp′(z) = 0 car exp′ = exp. Donc hest constante d’où ∀z ∈ IR, h(x) = h(0) c’est-à-dire exp(x + y − z) exp(z) = exp(x + y).En choisissant z = y, on obtient exp(x) exp(y) = exp(x+ y).
On en déduit immédiatement les propriétés suivantes :
Propriété 3.6.
• ∀x ∈ IR exp(x) > 0 et exp(−x) =1
exp(x)et expn = en où on a posé e = exp(1) ∼
2.718.• La fonction exp est strictement croissante sur IR.
Preuve. de l’unicité de la fonction exp :On se contentera de montrer l’unicité de exp. Supposons qu’il existe deux fonctions expet g vérifiant la relation (2). Alors la fonction h telle que h(x) = (exp(x) − g(x)) exp(−x)vérifie h′(x) = (exp′(x) − g′(x)) exp(−x) − (exp(x) − g(x)) exp(−x) = 0 car exp′ = expet g′ = g. Donc h est constante. Or h(0) = (1 − 1) × 1 = 0 Donc h est la fonction nulle,c’est-à-dire (exp(x)−g(x)) exp(−x) = 0. On en déduit que exp(x) = g(x) car exp(−x) > 0donc ne s’annule jamais.
12

3.6 Lien entre la fonction x → ex et la fonction exponentielle où
e = exp(1)
Théorème 3.3. La fonction exp est la seule fonction continue sur IR vérifiant
{exp(x+ y) = exp(x) exp(y)exp′(0) = 1
(3)
Preuve. La fonction exp vérifie exp(x + y) = exp(x) exp(y) ∀x, y ∈ IR et exp′(0) =exp(0) = 1 Donc exp vérifie (3).Réciproquement si g est une fonction qui vérifie (3) alors d’après la propriété (3.3), g étantnon nulle, on a g(0) = 1, de plus g est dérivable et vérifie g′(x) = g′(0)g(x) = g(x). Lafonction g vérifie la caractérisation de l’exponentielle (3.2). Donc g = exp.
D’après le théorème précédent, si on pose e = exp(1) alors la fonction exponentiellecorrespond à la fonction x→ ex.
∀x ∈ IR, exp(x) = ex, où on a posé e = exp(1).
Lemme 3.1. ∀x ∈ IR, exp(x) ≥ (x+ 1) ∀x ∈ IR.
Preuve. Pour montrer l’inégalité, on va étudier les variations de la fonction d telle qued(x) = exp(x)− x− 1.d′(x) = exp(x) − 1 = exp(x) − exp(0). Or la fonction exp est strictement croissante donc∀x ≥ 0, d′(x) ≥ 0 et ∀x ≤ 0, d′(x) ≤ 0.La fonction d est donc décroissante sur IR− et croissante sur IR+. On en déduit que d(x) ≥d(0) = 0 pour tous les réels x. D’où le résultat du lemme.
On en déduit le résultat suivant :
Théorème 3.4.lim
x→+∞exp(x) = +∞, lim
x→−∞exp(x) = 0+.
Preuve. D’après le lemme précédent, ∀x ≥ 0, exp(x) ≥ x + 1 ≥ x. Donc quand x prendde grandes valeurs (on dit quand x tend vers +∞), exp(x) est encore plus grand que x.Donc exp(x) tend vers +∞ quand x tend vers +∞.
D’autre part, exp(x) =1
exp(−x) , et quand x tend vers −∞ alors −x tend vers +∞ d’où
exp(−x) tend vers +∞. Or plus un nombre positif est grand, plus son inverse est petit.
Donc1
exp(−x) tend vers 0. Donc quand x tend vers −∞, exp(x) tend vers 0.
3.7 La fonction logarithme népérien
Théorème 3.5. et définition : La fonction exp étant continue sur IR, strictement crois-sante sur IR et vérifiant lim
x→+∞exp(x) = +∞, lim
x→−∞exp(x) = 0, admet donc une fonction
réciproque appelée logarithme népérien et notée ln.
∀x ∈ IR, ∀y > 0, y = exp(x) ⇐⇒ ln(y) = x.∀y > 0, exp(ln(y)) = y ∀x ∈ IR, ln(exp(x)) = x.
13
Propriété 3.7. La fonction ln est dérivable et strictement croissante sur IR+⋆.limx→0
ln(x) = −∞, limx→+∞
ln(x) = +∞, ln(1) = 0 et ln(e) = 1.
De plus, ln′(x) =1
x, ∀x > 0.
Preuve. La réciproque d’une fonction strictement croissante est aussi strictement crois-sante. Du résultat lim
x→+∞exp(x) = +∞, on déduit que lim
x→+∞ln(x) = +∞ puis du résultat
limx→−∞
exp(x) = 0 on déduit que limx→0+
ln(x) = −∞.
Enfin f(x) = exp(ln(x)) = x Donc d’une part la dérivée de f est 1 et d’autre part, par lethéorème de la dérivée d’une fonction composée, f ′(x) = ln′(x) exp′(ln(x)) = ln′(x) exp(ln(x)) =ln′(x)x. Donc 1 = x ln′(x). On en déduit que ln′(x) = 1/x.
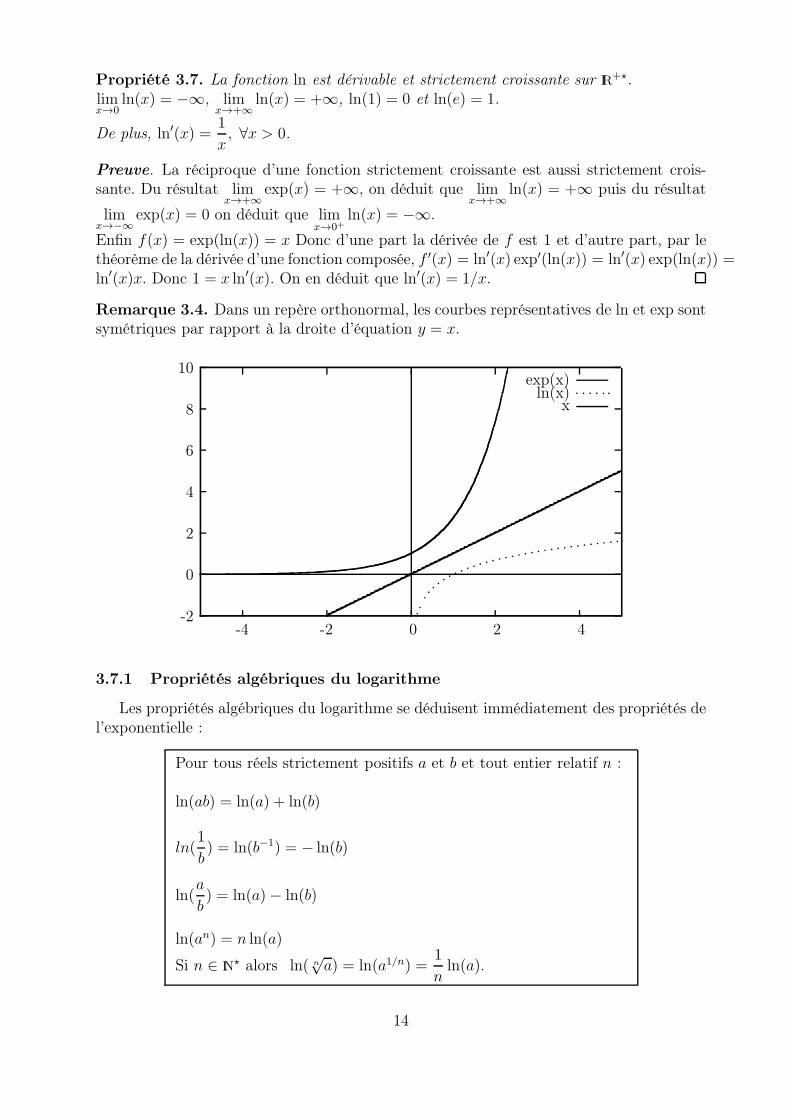
Remarque 3.4. Dans un repère orthonormal, les courbes représentatives de ln et exp sontsymétriques par rapport à la droite d’équation y = x.
-2
0
2
4
6
8
10
-4 -2 0 2 4
exp(x)ln(x)
x
3.7.1 Propriétés algébriques du logarithme
Les propriétés algébriques du logarithme se déduisent immédiatement des propriétés del’exponentielle :
Pour tous réels strictement positifs a et b et tout entier relatif n :
ln(ab) = ln(a) + ln(b)
ln(1
b) = ln(b−1) = − ln(b)
ln(a
b) = ln(a)− ln(b)
ln(an) = n ln(a)
Si n ∈ IN⋆ alors ln( n√a) = ln(a1/n) =
1
nln(a).
14

Preuve. exp(x+ y) = exp(x) exp(y) donc exp(ln(a) + ln(b)) = exp(ln(a)) exp(ln(b)) = abDonc ln(exp(ln(a) + ln(b))) = ln(ab) d’où le résultat ln(a) + ln(b) = ln(ab).
On a aussi exp(−x) = 1
exp(x)donc exp(− ln(a)) =
1
exp(ln(a))=
1
a. On a alors en compo-
sant par le logarithme : − ln(a) = ln(1
a). De même pour les autres propriétés.
3.7.2 Croissances comparées
On admettra le résultat suivant : Pour tout entier n strictement positif :
limx→+∞
exp(x)
xn= +∞ lim
x→−∞xn exp(x) = 0
limx→+∞
ln(x)
xn= 0+ lim
x→0+xn ln(x) = 0−
3.8 Lien entre les fonctions x→ ax, exponentielle et logarithme
Soit a > 0 et soit fa la fonction telle que fa(x) = exp(x ln(a)). Cette fonction est définiesur IR et vérifie :fa(1) = exp(ln(a)) = a et fa(x + y) = exp((x + y) ln(a)) = exp(x ln(a) + y ln(a)) =exp(x ln(a)) exp(y ln(b)) = fa(x)fa(y). On en déduit du théorème 3.1 que la fonction facorrespond à la fonction x→ ax.
Théorème 3.6. ∀x ∈ IR, ∀a > 0, ax = exp(x ln(a)).
Enfin, grâce à cette nouvelle caractérisation des fonctions x → ax, on peut démontrerla partie (II) des propriétés 3.1.
Propriété 3.8. Toutes les propriétés des puissance (3.1) sont valables pour x et y réelsquelconques.De plus ∀a > 0, ∀x ∈ IR, ln(ax) = x ln(a).
Preuve. Le résultat ln(ax) = x ln(a) découle immédiatement de la nouvelle caractérisationde ax.Montrons par exemple que axy = (ax)y : En effet, axy = exp(xy ln(a)) = exp(y ln(ax)) =(ax)y.
4 Limite d’une fonction numérique
4.1 Introduction :
Considérons la fonction f définie sur ]1,+∞[ par : f(x) =3x− 4
x− 1.
4.1.1 Comportement de f en +∞ :
Voici un tableau des valeurs de f , lorsque la variable x devient de plus en plus grande :
x 2 5 10 50 100 1000 10000f(x) 2 2.75 2.88889 2.977959 2.98989 2.99899 2.99989
15
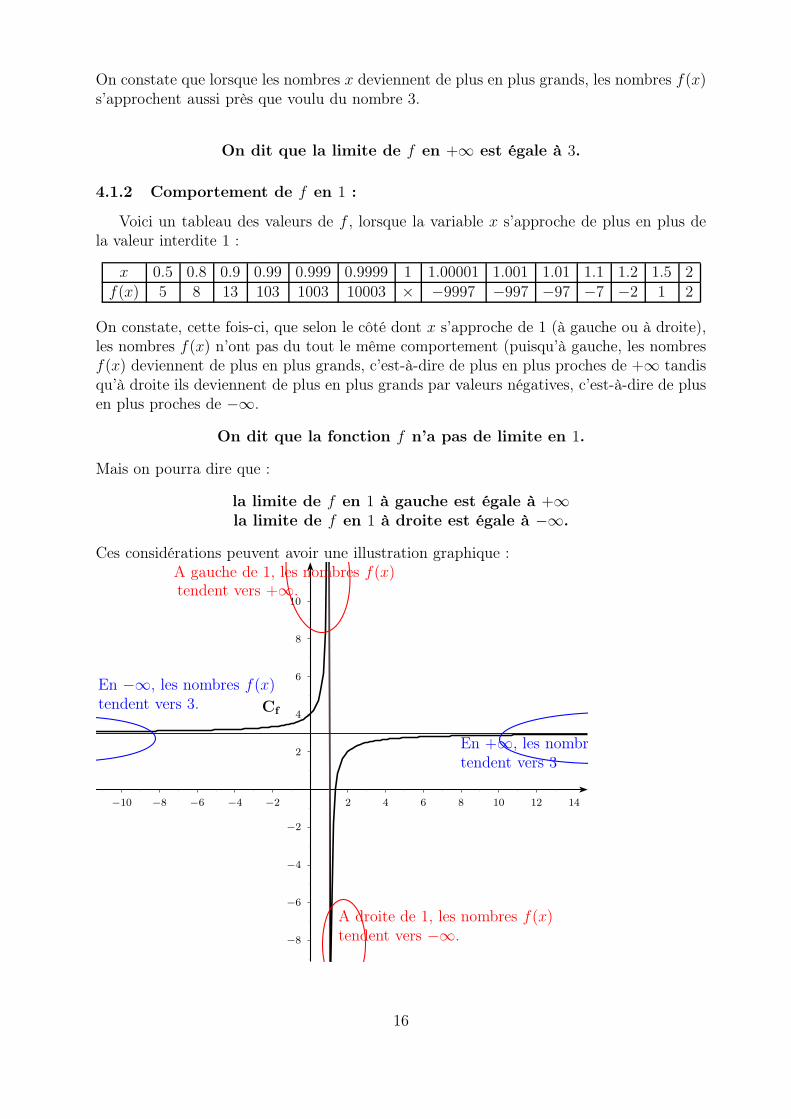
On constate que lorsque les nombres x deviennent de plus en plus grands, les nombres f(x)s’approchent aussi près que voulu du nombre 3.
On dit que la limite de f en +∞ est égale à 3.
4.1.2 Comportement de f en 1 :
Voici un tableau des valeurs de f , lorsque la variable x s’approche de plus en plus dela valeur interdite 1 :
x 0.5 0.8 0.9 0.99 0.999 0.9999 1 1.00001 1.001 1.01 1.1 1.2 1.5 2f(x) 5 8 13 103 1003 10003 × −9997 −997 −97 −7 −2 1 2
On constate, cette fois-ci, que selon le côté dont x s’approche de 1 (à gauche ou à droite),les nombres f(x) n’ont pas du tout le même comportement (puisqu’à gauche, les nombresf(x) deviennent de plus en plus grands, c’est-à-dire de plus en plus proches de +∞ tandisqu’à droite ils deviennent de plus en plus grands par valeurs négatives, c’est-à-dire de plusen plus proches de −∞.
On dit que la fonction f n’a pas de limite en 1.
Mais on pourra dire que :
la limite de f en 1 à gauche est égale à +∞la limite de f en 1 à droite est égale à −∞.
Ces considérations peuvent avoir une illustration graphique :
2
4
6
8
10
−2
−4
−6
−8
2 4 6 8 10 12 14−2−4−6−8−10
En −∞, les nombres f(x)tendent vers 3.
A gauche de 1, les nombres f(x)tendent vers +∞.
En +∞, les nombrestendent vers 3
A droite de 1, les nombres f(x)tendent vers −∞.
Cf
16

4.2 Définitions :
4.2.1 Limites d’une fonction en +∞Définition 4.1. Soit f une fonction définie au moins sur un intervalle de la forme [a,+∞[(a ∈ IR).Lorsque x prend des valeurs positives de plus en plus grandes, si les nombres f(x) de-viennent de plus en plus :
(i) grands, on dit que f a pour limite +∞ en +∞ et on note limx→+∞
f(x) = +∞.
(ii) grands en valeurs absolue mais négatifs, on dit que f a pour limite −∞ en +∞et on note lim
x→+∞f(x) = −∞.
(iii) proches d’un réel l (c’est-à-dire aussi proche que voulu), on dit que f a pour limitel en +∞ et on note lim
x→+∞f(x) = l.
4.2.2 Limites d’une fonction en −∞Définition 4.2. Soit f une fonction définie au moins sur un intervalle de la forme ]−∞, a](a ∈ IR).Lorsque x prend des valeurs positives de plus en plus grandes en valeurs absolue maisnégaryives, si les nombres f(x) deviennent de plus en plus :
(i) grands, on dit que f a pour limite +∞ en −∞ et on note limx→−∞
f(x) = +∞.
(ii) grands en valeurs absolue mais négatifs, on dit que f a pour limite −∞ en −∞et on note lim
x→−∞f(x) = −∞.
(iii) proches d’un réel l (c’est-à-dire aussi proche que voulu), on dit que f a pour limitel en −∞ et on note lim
x→−∞f(x) = l.
4.2.3 Limites d’une fonction en un réel a
Définition 4.3. Soit f une fonction définie au moins sur un intervalle I contenant le réela ou tel que a soit une borne de I.Lorsque x prend des valeurs positives de plus en plus proches de a, si les nombres f(x)deviennent de plus en plus :
(i) grands, on dit que f a pour limite +∞ en a et on note limx→a
f(x) = +∞.
(ii) grands en valeurs absolue mais négatifs, on dit que f a pour limite −∞ en a eton note lim
x→af(x) = −∞.
(iii) proches d’un réel l (c’est-à-dire aussi proche que voulu), on dit que f a pour limitel en a et on note lim
x→af(x) = l.
Pour la suite du cours, consulter la page web suivante du cours de Costantini :http ://gilles.costantini.pagesperso-orange.fr/Lycee_fichiers/CoursP_fichiers/limites.pdf
17

5 Dérivation et recherche d’extremum d’une fonction :
5.1 Sens de variation d’une fonction numérique :
Pour étudier la croissance ou la décroissance d’une fonction, on introduit le taux d’ac-croissement ou encore appelé le taux de variation.
Définition 5.1. Soient f une fonction définie sur Df et c, d ∈ Df tels que c 6= d. On
appelle taux de variation de f entre c et d le réel noté mcd(f) =f(d)− f(c)
d− c.
Exemple 5.1. Si f est une fonction affine de la forme f(x) = ax + b où a et b sont desréels fixés, alors le taux d’accroissement de f entre c et d ne dépend ni de d, ni de c et estégal à a.
Preuve.f(d)− f(c)
d− c=
ad+ b− (ac+ b)
d− c=
ad− ac
d− c=
a(d− c)
d− c= a.
Si on cherche à calculer la moyenne des variations de f sur [x0, x4], on calcule1
4(mx0x1+
mx1x2+mx2x3+mx3x4) =1
4(f(x1)− f(x0))
x1 − x0
+f(x2)− f(x1))
x2 − x1
+f(x3)− f(x2))
x3 − x2
+f(x4)− f(x3))
x3 − x4
) =
1
4× 2(f(x1)−f(x0)+f(x2)−f(x1)+f(x3)−f(x2)+f(x4)−f(x3)) =
f(x4)− f(x0)
x4 − x0= mx0x4 .
1
2
3
4
5
6
−1
−2
−3
1 2 3 4 5 6 7−1−2−3−4
f(x0)
f(x4)
x0
Cf
Taux de variation moyen de f sur [x0; x4]
x1 x2 x3 x4
Donc mx0x4 représente la croissance moyenne de la fonction f .C’est-à-dire, si mx0x4 > 0 alors f a augmenté en moyenne entre x0 et x4,et si mx0x4 < 0 alors f a diminué en moyenne entre x0 et x4.
Propriété 5.1.• f est constante sur Df si et seulement si ∀c, d ∈ Df , c 6= d, mcd(f) = 0.• f est croissante sur Df si et seulement si ∀c, d ∈ Df , c 6= d, mcd(f) ≥ 0.
18
• f est décrossante sur Df si et seulement si ∀c, d ∈ Df , c 6= d, mcd(f) ≤ 0.• f est strictement croissante sur Df si et seulement si ∀c, d ∈ Df , c 6= d, mcd(f) > 0.• f est strictement décrossante sur Df si et seulement si ∀c, d ∈ Df , c 6= d, mcd(f) < 0.
Preuve. f est croissante sur Df ⇔ ∀c, d ∈ Df tels que c < d on a f(c)− f(d) ≤ 0 ⇔∀c, d ∈ Df tels que c < d on a f(d)−f(c)
d−c≥ 0. En effet f(d)−f(c) et d− c sont positifs. Donc
f est croissante sur Df ⇔ ∀c, d ∈ Df tels que c < d on a mcd(f) ≥ 0.Or mcd(f) = mdc(f). Donc le résultat mcd(f) ≥ 0 est encore vraie si c > d. Donc f estcroissante sur Df ⇔ ∀c, d ∈ Df c 6= d, mcd(f) ≥ 0.On démontre de la même façon les autres propriétés.
5.2 Introduction de la dérivée d’une fonction :
1
2
3
4
5
6
−1
1 2 3 4 5 6 7−1
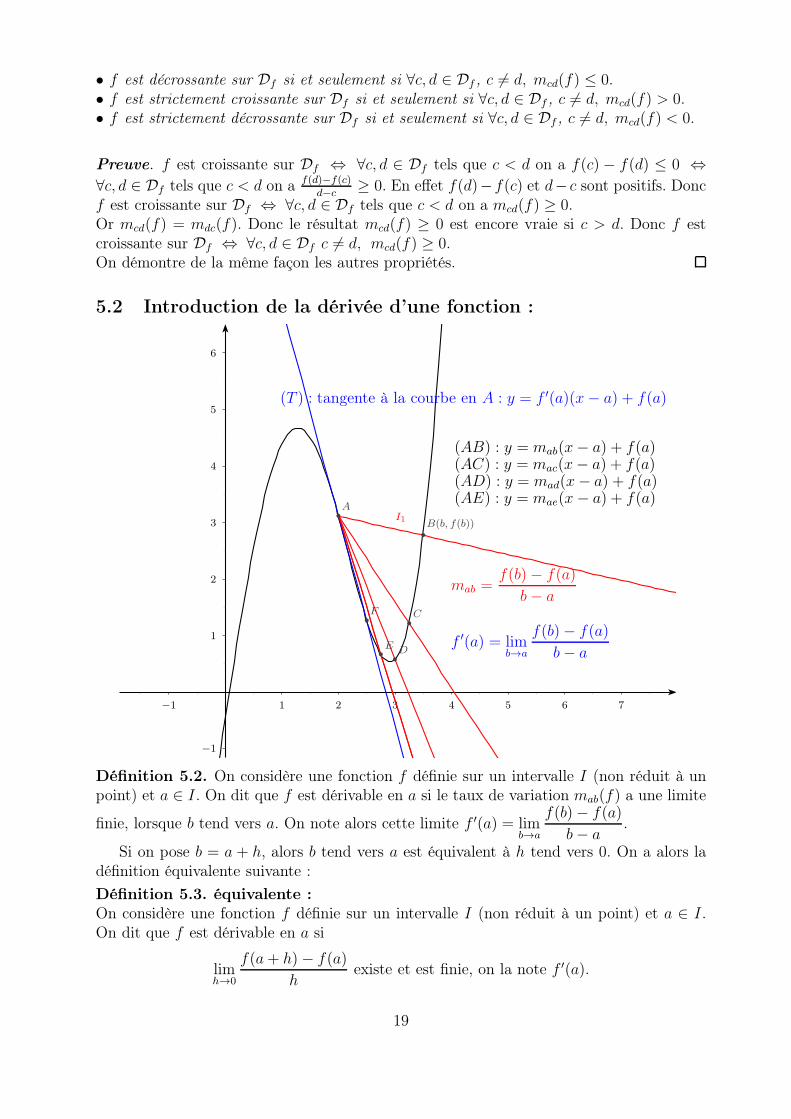
(AB) : y = mab(x− a) + f(a)(AC) : y = mac(x− a) + f(a)(AD) : y = mad(x− a) + f(a)(AE) : y = mae(x− a) + f(a)
(T ) : tangente à la courbe en A : y = f ′(a)(x− a) + f(a)
mab =f(b)− f(a)
b− a
f ′(a) = limb→a
f(b)− f(a)
b− a
bA
b
B(b, f(b))
bC
bDb
E
I1
bF
Définition 5.2. On considère une fonction f définie sur un intervalle I (non réduit à unpoint) et a ∈ I. On dit que f est dérivable en a si le taux de variation mab(f) a une limite
finie, lorsque b tend vers a. On note alors cette limite f ′(a) = limb→a
f(b)− f(a)
b− a.
Si on pose b = a + h, alors b tend vers a est équivalent à h tend vers 0. On a alors ladéfinition équivalente suivante :
Définition 5.3. équivalente :On considère une fonction f définie sur un intervalle I (non réduit à un point) et a ∈ I.On dit que f est dérivable en a si
limh→0
f(a+ h)− f(a)
hexiste et est finie, on la note f ′(a).
19

Propriété 5.2. La fonction f étant définie sur I et a ∈ I, f est dérivable en a si etseulement si il existe une fonction ε telle que lim
x→aε(x) = 0 et telle que
∀x ∈ I, f(x) = f(a) + f ′(a)(x− a) + (x− a)ε(x).
Preuve. Si f est dérivable en a alors limx→a
f(x)− f(a)
x− a= f ′(a). Posons pour x ∈ I, x 6= a,
ε(x) = f(x)−f(a)x−a
− f ′(a) alors ε(x) tend vers 0 lorsque x tend vers a et f(x) − f(a) =(x− a)(f ′(a) + ε(x)), c’est-à-dire f(x) = f(a) + f ′(a)(x− a) + ε(x)(x− a).La réciproque se démontre de même facilement.
Définition 5.4. Si f est dérivable en a, on appelle tangente à la courbe Cf au pointA(a, f(a)), la droite notée (Ta) passant par A(a, f(a)) et de coefficient directeur f ′(a).
(Ta) : y = f ′(a)(x− a) + f(a).
La propriété 5.2 permet de remarquer que lorsque x est proche de a, on peut approcherf(x) par f(a) + f ′(a)(x− a), ce qui revient à dire que l’on confond Cf avec sa tangente enA(a, f(a). On écrit alors
Pour x proche de a f(x) ∼ f(a) + f ′(a)(x− a).
Exemple 5.2. • La fonction valeur absolue qui à x ∈ IR associe |x| est une fonctioncontinue sur IR et dérivable sur [0,+∞[ (c’est-à-dire sur ]0,+∞[ et à droite en 0) etsur ]−∞, 0] mais n’est pas dérivable en 0.Cependant | · | est dérivable à droite en 0 et sa dérivée à droite en 0 est égale à 1. Demême | · | est dérivable à gauche en 0 et sa dérivée à gauche en 0 est égale à −1.Preuve. |·| est continue et dérivable sur ]0,+∞[ (car pour tout x ∈]0,+∞[, |x| = x),de même sur ]−∞, 0[ (car pour tout x ∈]−∞, 0[, |x| = −x).Etude en 0 :
Si x ≥ 0 |x| = x d’où limx→0+
|x| = 0
Si x ≤ 0 |x| = −x d’où limx→0−
|x| = 0
}
donc limx→0|x| = 0.
Donc | · | est continue en 0.
Si x ≥ 0 |x| = x d’où limx→0+
|x|/x = 1
Si x ≤ 0 |x| = −x d’où limx→0−
|x|/x = −1
}
donc |·| n’est pas dérivable en 0.
• La fonction√
est dérivable en a, si a > 0 et sa dérivée est a → 1
2√a
mais n’est
pas dérivable en 0.
Preuve. Soit a > 0,
√x−√ax− a
=
√x−√a
√x2 −√a2
=(√x−√a)
(√x−√a)(√x+
√a)
=1√
x+√a.
Or lorsque x tend vers a,√x tend vers
√a. Donc lim
x→a
√x−√ax− a
=1√
a +√a=
1
2√a.
Que se passe-t-il si a = 0 ? limx→0+
√x−√0
x− 0= lim
x→0+
√x
x= lim
x→0+
1√x= +∞.
20
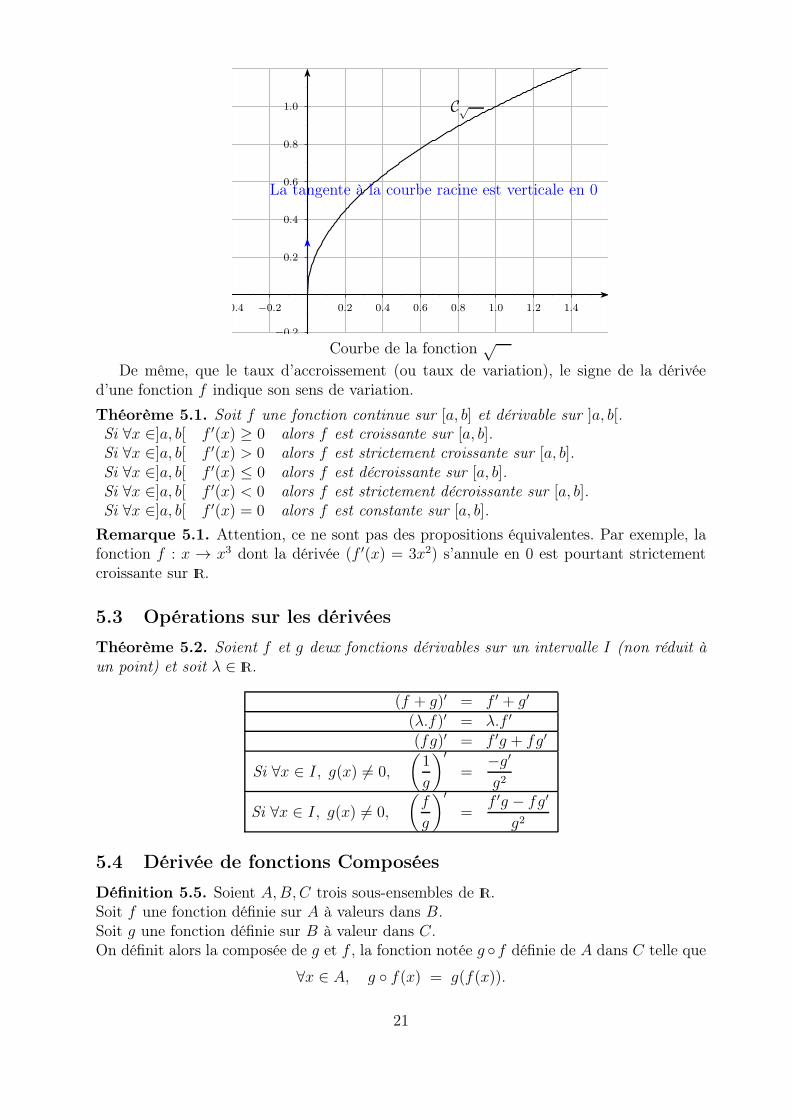
0.2
0.4
0.6
0.8
1.0
−0.2
0.2 0.4 0.6 0.8 1.0 1.2 1.4−0.2−0.4
La tangente à la courbe racine est verticale en 0
C√
Courbe de la fonction√
De même, que le taux d’accroissement (ou taux de variation), le signe de la dérivéed’une fonction f indique son sens de variation.
Théorème 5.1. Soit f une fonction continue sur [a, b] et dérivable sur ]a, b[.Si ∀x ∈]a, b[ f ′(x) ≥ 0 alors f est croissante sur [a, b].Si ∀x ∈]a, b[ f ′(x) > 0 alors f est strictement croissante sur [a, b].Si ∀x ∈]a, b[ f ′(x) ≤ 0 alors f est décroissante sur [a, b].Si ∀x ∈]a, b[ f ′(x) < 0 alors f est strictement décroissante sur [a, b].Si ∀x ∈]a, b[ f ′(x) = 0 alors f est constante sur [a, b].
Remarque 5.1. Attention, ce ne sont pas des propositions équivalentes. Par exemple, lafonction f : x → x3 dont la dérivée (f ′(x) = 3x2) s’annule en 0 est pourtant strictementcroissante sur IR.
5.3 Opérations sur les dérivées
Théorème 5.2. Soient f et g deux fonctions dérivables sur un intervalle I (non réduit àun point) et soit λ ∈ IR.
(f + g)′ = f ′ + g′
(λ.f)′ = λ.f ′
(fg)′ = f ′g + fg′
Si ∀x ∈ I, g(x) 6= 0,
(1
g
)′=−g′g2
Si ∀x ∈ I, g(x) 6= 0,
(f
g
)′=
f ′g − fg′
g2
5.4 Dérivée de fonctions Composées
Définition 5.5. Soient A,B,C trois sous-ensembles de IR.Soit f une fonction définie sur A à valeurs dans B.Soit g une fonction définie sur B à valeur dans C.On définit alors la composée de g et f , la fonction notée g ◦f définie de A dans C telle que
∀x ∈ A, g ◦ f(x) = g(f(x)).
21

Exemple 5.3. Soit f définie sur IR par f(x) = (2x+ 1) et g définie sur IR par g(x) = x3.Alors(g ◦ f)(x) = g(f(x)) = g(2x+ 1) = (2x+ 1)3 et (f ◦ g)(x) = f(g(x)) = f(x3) = 2x3 + 1.(g ◦ f)(1) = (2× 1 + 1)3 = 27 et (f ◦ g)(1) = 2× 13 + 1 = 3 6= 27.Attention : f ◦ g 6= g ◦ f .
Théorème 5.3. Soient I et J deux intervalles de IR. Soient u une fonction dérivable surI à valeurs dans J et f une fonction dérivable sur J à valeurs dans IR. Alors f ◦ u estdérivable sur I et
∀x ∈ I, (f ◦ u)′(x) = u′(x) f ′(u(x)).
Corollaire 5.1. La fonction ln (logarithme néperien) est dérivable sur IR+∗ et
∀x ∈ IR+⋆, ln′(x) =1
x.
Preuve. On sait que la fonction ln est la fonction réciproque de la fonction exponentielle,dont on sait qu’elle est dérivable et que exp′(x) = exp(x)∀x ∈ IR. On admet alors que lafonction ln est dérivable sur IR+⋆. Calculons ln′ :∀x ∈ IR+⋆, (exp ◦ ln)(x) = x. Or d’après le théorème précédent, (exp ◦ ln)′(x) = ln′(x) exp′(ln(x)),donc ln′(x) exp(ln(x)) = 1 (la dérivée de x → x est égale à 1 et exp′ = exp). Commeexp(ln(x)) = x, on en déduit que ln′(x)× x = 1, ce qui donne le résultat voulu.
5.5 Quelques dérivées usuelles
Théorème 5.4.Fonction f Dérivée f ′
f(x) = a (a ∈ IR) 0f(x) = x f ′(x) = 1f(x) = xα (α ∈ IR⋆) f ′(x) = αxα−1
f(x) = ex f ′(x) = ex
f(x) = ln(x) f ′(x) =1
x
5.6 Exercices :
• Etude des variations de la fonction f : x→ x3 − 92x2 + 6x+ 3.
∀x ∈ IR, f ′(x) = 3x2 − 92× 2x1 + 6 + 0 = 3x2 − 9x+ 6 = 3(x2 − 3x+ 2).
Signe de f ′(x) en fonction de x : f ′ est une fonction polynomiale de degré 2.
∆ = 32 − 4 × 1 × 2 = 1. Posons x1 =−(−3)− 1
2× 1= 1 et x2 =
−(−3) + 1
2= 2.
D’après le chapitre sur les fonctions quadratiques, x2 − 3x+ 1 est du signe de a = 1sur ]−∞, 1[∪]2,+∞[ et du signe de −a = −1 sur ]1, 2[.On en déduit que f est strictement décroissante sur [1, 2] et strictement croissantesur ]−∞, 1[ et sur ]2,+∞[.On résume ces propriétés, dans le tableau suivant appelé tableau de variation def :
22

x −∞ 1 2 +∞f ′(x) + 0 − 0 +
f(x) −∞%%
112
& 5%%
+∞
• Dérivée de f telle que f(x) = 3(2x−4)5 : si on pose u(x) = 2x−4, alors u′(x) = 2 etf(x) = 3(u(x)5. Puisque la dérivée de x→ x5 est x→ 5x4, on a f ′(x) = 3× u′(x)×5(u(x))4 = 15× 2× (2x− 4)5 = 30(2x− 4)5.
• Dérivée de g telle que g(x) =5
x4: on écrit g(x) = 5x−4 et on utilise la troisième
formule du tableau des dérivées usuelles.
g′(x) = 5× (−4)x−4−1 =−20x5
.
• Dérivée de k telle que k(x) =5
(x2 + 1)4: on remarque que k(x) = g(u(x)) = (g◦u)(x)
où u(x) = x2 + 1. Donc k′(x) = u′(x)g′(u(x)) = 2x× −20u(x)5
=−40x
(x2 + 1)5.
• Dérivée de m telle que m(x) = 2x : m(x) = ex ln(2) = eu(x) avec u(x) = ln(2)x.u′(x) = ln(2) et m′(x) = u′(x)× exp′(u(x)) = ln(2)ex ln(2) = ln(2).2x.• Dérivée de p telle que p(x) = ex
2: p est de la forme p(x) = exp(u(x)) avec u(x) = x2.
Donc p′(x) = u′(x) exp′(u′x)) = 2x exp(x2) = 2xex2.
• Dérivée de q telle que q(x) =ln(2x)
3− x=
u(x)
v(x)où u(x) = ln(2x) et v(x) = 3 − x. On
a : u′(x) = (2x)′1
2x= 2
1
2x=
1
xet v′(x) = −1.
q′(x) =u′(x)v(x)− v′(x)u(x)
(v(x))2=
1
(3− x)2[(1
x(3−x)−(−1) ln(2x)] = 1
(3− x)2[(3− x) + x ln(2x)
x].
Donc q′(x) =(3− x) + x ln(2x)
(3− x)2x.
5.7 Etude de la fonction fa : x→ ax, a > 0 :
Propriété 5.3.La dérivée de x→ ax est x→ ln(a)ax.Si 0 < a < 1, l’application x → ax est strictement décroissante sur IR, lim
x→−∞ax = +∞ et
limx→+∞
ax = 0+.
Si 1 < a, l’application x → ax est strictement croissante sur IR, limx→−∞
ax = 0+ et
limx→+∞
ax = +∞.
Si a = 1, l’application x→ 1x est constante sur IR.
Preuve. Sens de variation de fa : Comme dans l’exercice précédent, la dérivée defa : x→ ax est (ln(a)x)′ exp′(x ln(a)) = ln(a)ax. (cf. détails ci-dessus).Le signe de la dérivée de fa dépend du signe de ln(a), puisque ax est toujours positif. Orln(a) < 0 si et seulement si 0 < a < 1. Donc si 0 < a < 1, f ′
a est strictement négative donc
23
fa est strictement décroissante sur IR. Même raisonnement pour a > 1.Limites de fa en −∞ et +∞ : ax = ex ln(a).Si 0 < a < 1, ln(a) < 0, donc lim
x→−∞ln(a)x = +∞. De plus lim
X→+∞eX = +∞. Donc
limx→−∞
eln(a)x = +∞ (X = ln(a)x).
Si a > 1, ln(a) > 0, donc limx→−∞
ln(a)x = −∞. De plus limX→−∞
eX = 0+. Donc limx→−∞
eln(a)x =
0+ (X = ln(a)x).
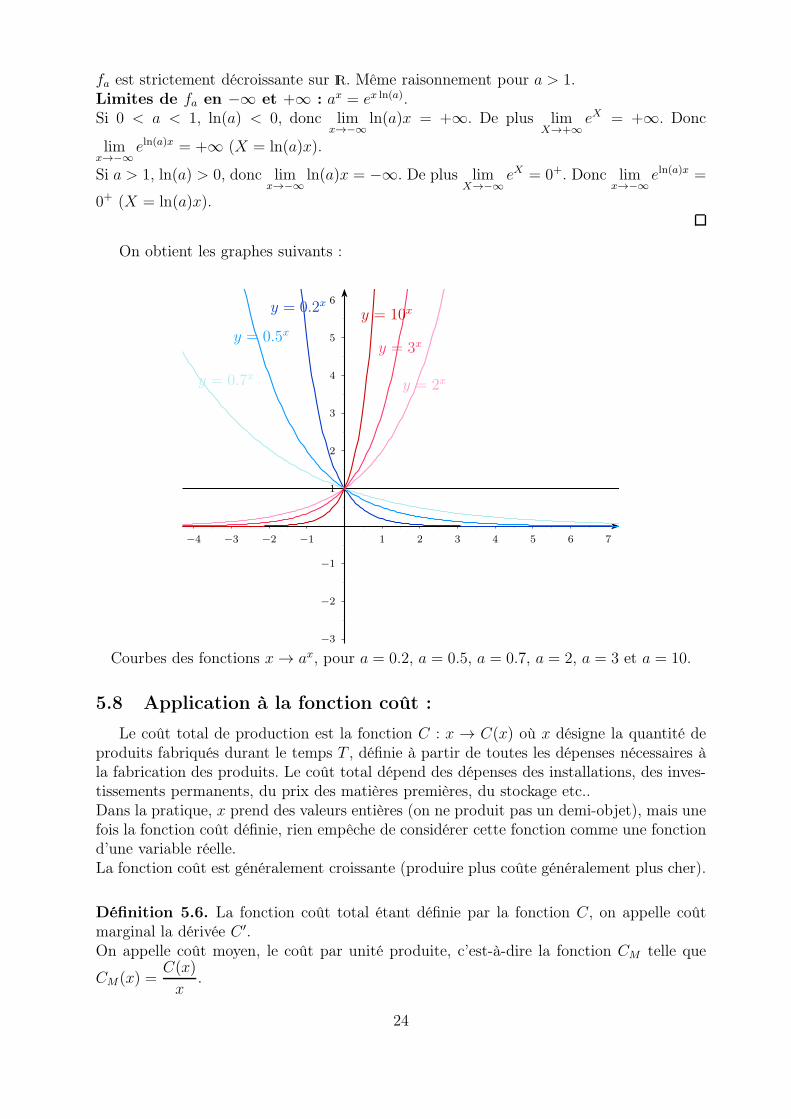
On obtient les graphes suivants :
1
2
3
4
5
6
−1
−2
−3
1 2 3 4 5 6 7−1−2−3−4
y = 10x
y = 3x
y = 2xy = 0.7x
y = 0.5x
y = 0.2x
Courbes des fonctions x→ ax, pour a = 0.2, a = 0.5, a = 0.7, a = 2, a = 3 et a = 10.
5.8 Application à la fonction coût :
Le coût total de production est la fonction C : x → C(x) où x désigne la quantité deproduits fabriqués durant le temps T , définie à partir de toutes les dépenses nécessaires àla fabrication des produits. Le coût total dépend des dépenses des installations, des inves-tissements permanents, du prix des matières premières, du stockage etc..Dans la pratique, x prend des valeurs entières (on ne produit pas un demi-objet), mais unefois la fonction coût définie, rien empêche de considérer cette fonction comme une fonctiond’une variable réelle.La fonction coût est généralement croissante (produire plus coûte généralement plus cher).
Définition 5.6. La fonction coût total étant définie par la fonction C, on appelle coûtmarginal la dérivée C ′.On appelle coût moyen, le coût par unité produite, c’est-à-dire la fonction CM telle que
CM(x) =C(x)
x.
24

Si on augmente la production d’une petite quantité ∆x, le coût est augmenté de
C(x+∆)−C(x) =C(x+∆x)− C(x)
(x+∆x)− x×∆x ≈ C ′(x)∆x. On a approché le taux de variation
par la dérivée.En général, on se sert du coût marginal comme indicateur pour évaluer la pertinence d’uneaugmentation de la production. Plus le coût marginal est faible, plus le coût de fabricationpar unité est réduit.Pour obtenir le meilleur coût moyen, on recherche les valeurs (positives) où le coût estminimal.
5.9 Dérivées d’ordre supérieur
Définition 5.7. On note f” ou f (2) la dérivée de la fonction f ′.On note f (3) la dérivée de la fonction f”.Par récurrence sur n (n ∈ IN
⋆), on note f (n+1) la dérivée de la fonction f (n).Par convention, on note f (0) la fonction f .
Exemple 5.4. Soit f : x → x5. Alors f ′(x) = 5x4, f”(x) = 5 × 4x3, puis f (3)(x) =5 × 4 × 3x2, f (4)(x) = 5 × 4 × 3 × 2x, f (5)(x) = 5 × 4 × 3 × 2 = 5!. De plus f (n)(x) = 0pour tout n > 5.
5.9.1 Formule de Taylor
Au voisinage du réel a, c’est-à-dire pour x ∈]a − η, a + η[ avec η > 0 petit ("petitintervalle centré en a), on peut approcher f(x) par la fonction affine f(a) + f ′(a)(x − a).On peut vouloir approcher f(x) par une fonction quadratique (fonction polynôme de degréinférieur ou égal à 2).On verra que cela permet d’avoir localement autour du point A(a, f(a)) la position de latangente par rapport à Cf . Pour cela, admettons le théorème suivant :
Théorème 5.5. de Taylor à l’ordre 2Pour toute fonction f définie sur I (intervalle non réduit à un point) dont la dérivée secondeest continue sur I, et pour tout a ∈ I, il existe une fonction εa définie sur I telle que
∀x ∈ I, f(x) = f(a) + f ′(a)(x− a) +1
2f”(a)(x− a)2 + (x− a)2εa(x),
limx→a
εa(x) = 0.(4)
Remarque 5.2. Si x est proche de a, on peut écrire que
f(x) ≈ f(a) + f ′(a)(x− a)︸ ︷︷ ︸
partie affine
+f”(a)
2(x− a)2
︸ ︷︷ ︸
partie polynôme 2nd degré
5.9.2 Position de la tangente par rapport à la courbe
Déterminons localement, la position de la tangente (Ta) : y = f(a) + f ′(a)(x− a) parrapport à la courbe Cf : y = f(x).D’après le théorème de Taylor (4),
25
f(x)− (f(a)+ f ′(a)(x− a)) =1
2f”(a)(x− a)2 +(x− a)2εa(x) = (x− a)2[
1
2f”(a)+ εa(x).]
Si f ′′(a) > 0, alors au voisinage de a, f”(a)2
+ εa(x) reste positif car εa(x), qui tend vers 0
quand x tend vers a , reste petit devantf ′′(a)
2. On en déduit que lorsque x est proche de
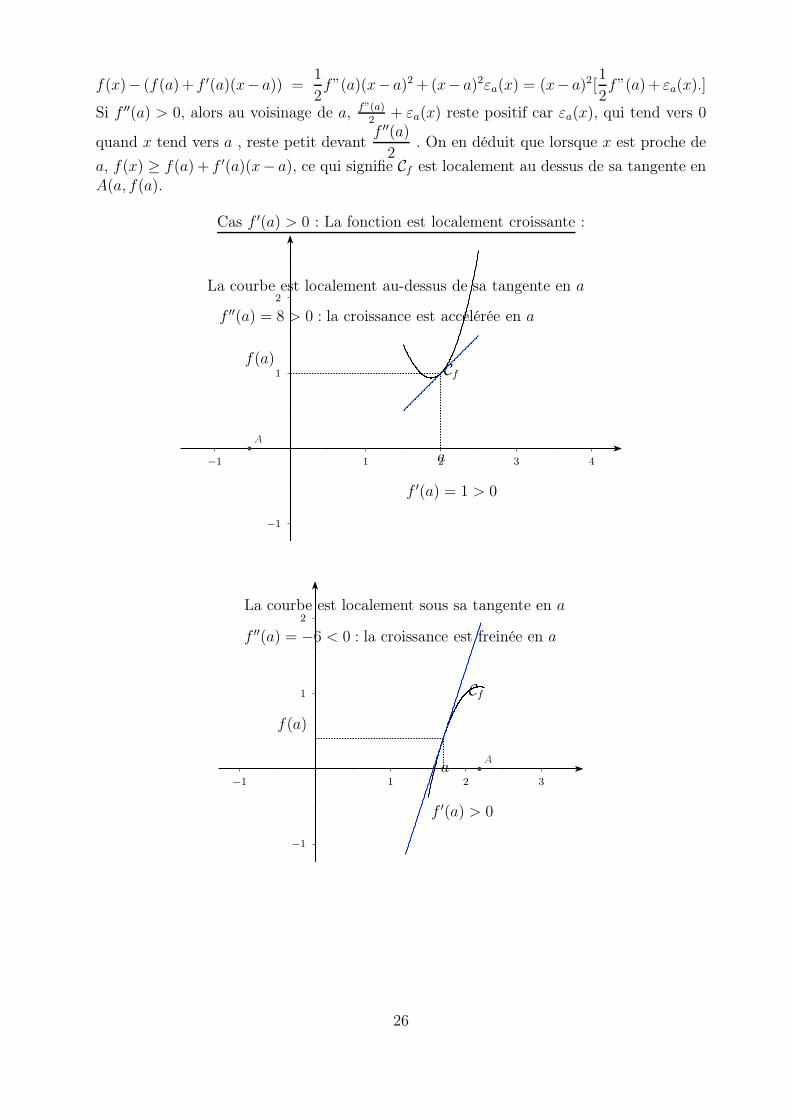
a, f(x) ≥ f(a) + f ′(a)(x− a), ce qui signifie Cf est localement au dessus de sa tangente enA(a, f(a).
Cas f ′(a) > 0 : La fonction est localement croissante :
1
2
−1
1 2 3 4−1
Cf
a
f(a)
f ′(a) = 1 > 0
f ′′(a) = 8 > 0 : la croissance est accélérée en a
La courbe est localement au-dessus de sa tangente en a
bA
1
2
−1
1 2 3−1
Cf
a
f(a)
f ′(a) > 0
f ′′(a) = −6 < 0 : la croissance est freinée en a
La courbe est localement sous sa tangente en a
bA
26
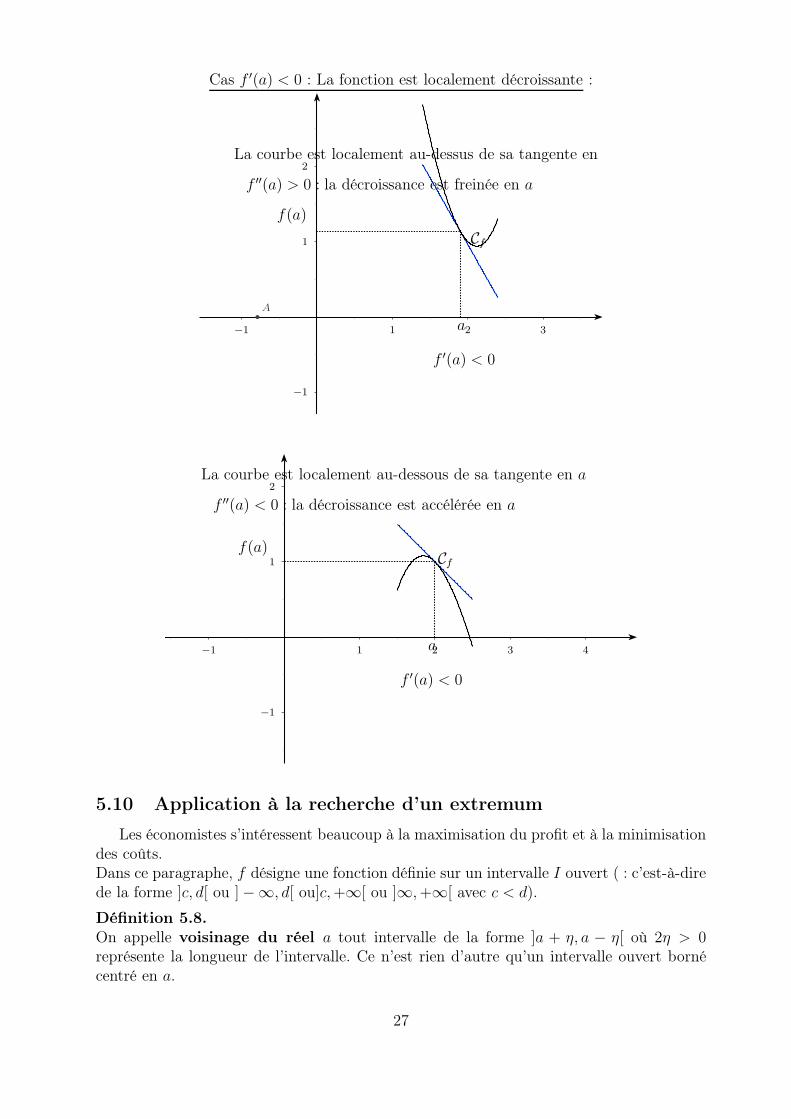
Cas f ′(a) < 0 : La fonction est localement décroissante :
1
2
−1
1 2 3−1
Cf
a
f(a)
f ′(a) < 0
f ′′(a) > 0 : la décroissance est freinée en a
La courbe est localement au-dessus de sa tangente en a
bA
1
2
−1
1 2 3 4−1
Cf
a
f(a)
f ′(a) < 0
f ′′(a) < 0 : la décroissance est accélérée en a
La courbe est localement au-dessous de sa tangente en a
5.10 Application à la recherche d’un extremum
Les économistes s’intéressent beaucoup à la maximisation du profit et à la minimisationdes coûts.Dans ce paragraphe, f désigne une fonction définie sur un intervalle I ouvert ( : c’est-à-direde la forme ]c, d[ ou ]−∞, d[ ou]c,+∞[ ou ]∞,+∞[ avec c < d).
Définition 5.8.On appelle voisinage du réel a tout intervalle de la forme ]a + η, a − η[ où 2η > 0représente la longueur de l’intervalle. Ce n’est rien d’autre qu’un intervalle ouvert bornécentré en a.
27

Définition 5.9.On dit que f atteint un maximum local (ou encore relatif) en a, si
f(x) ≤ f(a) pour tout x dans un voisinage de a.
On dit que f atteint un maximum global sur I en a, si
f(x) ≤ f(a) pour tout x ∈ I.
De même, on dit que f atteint un minimum local (ou encore relatif) en a, si
f(x) ≥ f(a) pour tout x dans un voisinage de a.
On dit que f atteint un minimum global sur I en a, si
f(x) ≥ f(a) pour tout x ∈ I.
Remarque 5.3. Si f admet un minimum local en a, on dira simplement que f(a) est unminimum local de f .
Théorème 5.6. Si f admet un extremum local en a, a appartenant à l’intervalle ouvertI alors
f ′(a) = 0.
Définition 5.10. Tout point a tel que f ′(a) = 0 est appelé point critique de f .
Attention : Le réel a étant dans l’intervalle ouvert I, pour que f(a) soit un extremumde f , il est nécessaire que a soit un point critique. Cependant, ce n’est pas une conditionsuffisante.La réciproque du théorème est fausse- Contre-exemple :Soit f telle que f(x) = x3. f ′(x) = 3x2. 0 est le seul point critique de f (en effet 3x2 = 0 siet seulement si x = 0). Or f(x) < 0 = f(0), ∀x < 0, donc f ne présente pas de minimumlocal en 0.De même, f(x) > 0 = f(0), ∀x > 0 donc f ne présente pas de maximum local en 0. Lepoint 0 n’est donc ni un maximum local, ni un minimum local.
5.10.1 Comment savoir si un point critique est un extremum local ?
Soit f une fonction ayant une dérivée seconde continue sur l’intervalle ouvert I. Soita ∈ I un point critique de f ( : f ′(a) = 0). Alors
f(x) = f(a) + f ′(a)︸ ︷︷ ︸
=0
(x− a) + f′′
(a)(x− a)2 + (x− a)2ε(x)
f(x)− f(a) = (x− a)2[f′′
(a) + ε(x)] ≥ 0si f ′′(a) > 0f(x)− f(a) = (x− a)2[f
′′
(a) + ε(x)] ≤ 0si f ′′(a) < 0
Théorème 5.7. Soit f une fonction ayant une dérivée seconde continue sur l’intervalleouvert I. Soit a ∈ I. On suppose que a est un point critique (ou stationnaire) de f .Si f ′′(a) > 0, f(x) ≥ f(a) pour tout x dans un voisinage de a. Donc f présente unminimum local en a.Si f ′′(a) < 0, f(x) ≤ f(a) pour tout x dans un voisinage de a. Donc f présente unmaximum local en a.Si f ′′(a) = 0 alors on ne peut rien conclure.
28

Attention : Sur un intervalle qui n’est pas ouvert, par exemple [a, b], les candidats poten-tiels pour être extremum local sont les points critiques (qui appartiennent à l’intérieur deI) + les points du bord (ici a et b).
Exemple 5.5. Soit f définie sur I = [−2, 2], par f(x) = x3. Alors f ′(x) = 3x2. f ′(x) = 0si et seulement si x = 0. Donc 0 est le seul point critique de f sur I.
1
2
3
−1
−2
−3
1 2 3 4 5−1−2−3−4
f présente un max en 2
f présente un minimum en − 2
0 est le seul point critique de fmais ne correspond ni à un max, ni à un min
Exercice :1)- Trouver les points critiques de f sur IR telle que f(x) = (x2 − 5)2 + 2x2.2)- Donner la nature de chaque point critique.3)- Montrer que f présente un extremum local en 0 qui n’est pas global.4)- Etudier les variations de la fonction f (faire un tableau de variation). Les autres extremasont-ils globaux ?
6 Fonction numérique de deux variables :
6.1 Introduction et représentation
Les fonctions de deux variables interviennent par exemple, lorsque l’on veut étudier lebénéfice d’une entreprise qui fabrique plusieurs produits. Ici nous nous restreindrons au casde deux produits (le cas général se traitant de la même façon mais les calculs deviennentplus compliqués).
Définition 6.1. Une fonction numérique f de deux variables réelles x et y est une relationqui à chaque couple (x, y) associe au plus une valeur réelle notée alors f(x, y).
Exemple 6.1. La surface S d’un rectangle de longueur L et de largeur l est une fonctiondes deux variables L et l : S(L, l) = L× l.
Définition 6.2. L’ensemble des couples (x, y) auxquels correspondent une valeur f(x, y)s’appelle le domaine de définition de f et est notée Df . C’est une partie de IR × IR. Si onidentifie IR× IR au plan (xOy), Df devient une partie du plan (xOy).
29

6.1.1 Exemples de parties du plan (xOy)
Lemme 6.1. Dans un repère orthonormé (0, I, J) du plan (xOy), la distance, d(A,B)entre les deux points A(xA, yA) et B(xB, yB) est égale à :
d(A,B) =√
(xA − xB)2 + (yA − yB)2.
Preuve. Soit C(xA, yB). Alors la droite (AC) est parallèle à l’axe des ordonnées et ladroite (BC) est parallèle à l’axe des abscisses. Les axes des abscisses et des ordonnées étantorthogonales (le repère étant orthonormé), les droites (AC) et (BC) sont aussi orthogonaleset donc le triangle (A,B,C) est rectangle en C (cf. figure ci-dessous).Donc AB2 = AC2 + CB2, d’où AB =
√AC2 + CB2. Or AC2 = (yB − yA)
2 et CB2 =(xB − xA)
2. On obtient donc le résultat voulu.
1
2
−1
−2
1 2 3 4 5−1−2−3
AB2 = AC2 + CB2
AC2 = (yA − yC)2 CB2 = (xC − xB)
2
bA
bB
bC
Propriété 6.1. i) L’ensemble des points M(x, y) tel que
(x− x0)2 + (y − y0)
2 = r2
représente le cercle noté C(C, r) de centre C(x0, y0) et de rayon r ≥ 0.
ii) L’ensemble des points M(x, y) tel que
(x− x0)2 + (y − y0)
2 < r2
représente le disque ouvert noté D0(C, r) de centre C(x0, y0) et de rayon r ≥ 0.
iii) L’ensemble des points M(x, y) tel que
(x− x0)2 + (y − y0)
2 ≤ r2
représente le disque fermé noté DF (C, r) de centre C(x0, y0) et de rayon r ≥ 0.
iv) L’ensemble des points M(x, y) qui vérifient
ax+ by + c = 0 avec a 6= 0 ou b 6= 0
représente une droite du plan.
v) L’ensemble des points M(x, y) qui vérifient
ax+ by + c > 0 avec a 6= 0 ou b 6= 0
représente le demi-plan ouvert ( : ne contenant pas la frontière) de frontière ladroite d’équation ax+ by+ c = 0 contenant l’origine (0, 0) si c > 0, ne contenant pasl’origine si c < 0 et contenant le point (a, b) si c = 0.
30
vi) L’ensemble des points M(x, y) qui vérifient
ax+ by + c ≥ 0 avec a 6= 0 ou b 6= 0
représente le demi-plan fermé ( : contenant la frontière) de frontière la droited’équation ax + by + c = 0 contenant l’origine (0, 0) si c > 0, ne contenant pasl’origine si c < 0 et contenant le point (a, b) si c = 0.
1
2
3
4
5
−1
−2
1 2 3 4 5 6−1−2−3−4
Demi-plan P1 : −3x+ 2y − 1 > 0D : −3x− 2y − 1 = 0
O /∈ P1 car − 1 6> 0
D
bO
6.1.2 Graphe - Courbe de niveau
Définition 6.3. Soit f une fonction de deux variables à valeurs dans Rm. Le graphede f , noté Sf est l’ensemble des points de l’espace de coordonnées (x, y, f(x, y)), lorsque(x, y) varie sur le domaine de définition de f . C’est une surface de l’espace.
L’équation de Sf est : z = f(x, y).
Exemple 6.2. i) Cas où f est une application affine. f(x, y) = ax+ by+ c avec (a, b) 6=(0, 0). Df = IR
2 ( : c’est-à-dire le plan tout entier). Le graphe de f est le pland’équation
Sf : z = ax+ by + c.
Graphe de f lorsque f(x, y) = ax+ by + c.
31
ii) Cas où f est définie par f(x, y) = x2 + y2. Df = IR2. Sf est un paraboloïde d’axe(Oz). La surface Sf est symétrique par rapport à l’axe (Oz). cf. figure ci-dessous.
Graphe de f : (x, y)→ x2 + y2 - paraboloïde.
Une façon plus simple de représenter le graphe Sf de f est de représenter dans le plan(xOy), l’ensemble des points (x, y) qui ont la même valeur par f par une même couleur.C’est le principe utilisé, par exemple, pour les cartes topographiques de randonnées.
Définition 6.4. Soit z0 ∈ IR, la courbe de niveau z0 de f , notée Cz0 , est l’ensemble despoints M(x, y) tels que f(x, y) = z0.Si (x0, y0) ∈ Df , l’ensemble des points M(x, y) tels que f(x, y) = f(x0, y0) est appelécourbe de niveau de f en (x0, y0).
Remarque 6.1. En économie, les courbes de niveau s’appellent aussi des courbes d’indif-férence ou des courbes d’iso-production ou isoquantes ou iso-coût.
Exemple 6.3. Cas des polynômes du second degré : On appelle fonction polynomiale dusecond degré de deux variables, toute fonction f de la forme :
f(x, y) = ax2 + bxy + cy2 + dx+ ey + i, où a, b, c, d, e, i sont des réels donnés.
i) f(x, y) = 2− x2 − y2.On remarque que f(x, y) ≤ 2 pour tout (x, y) ∈ IR2.• Donc si z0 > 2 la courbe de niveau z0 est vide.• Si z0 = 2, alors f(x, y) = 2 ⇐⇒ x2 + y2 = 0 ⇐⇒ x = y = 0. Donc Cz0 = (0, 0).• Si z0 < 2, alors f(x, y) = z0 ⇐⇒ 2 − x2 − y2 = z0 ⇐⇒ x2 + y2 = 2 − z0. Or2 − z0 > 0 donc si on pose r0 =
√2− z0, alors M(x, y) ∈ Cz0 ⇐⇒ x2 + y2 = r20.
DoncCz0 est le cercle de centre (0, 0) et de rayon r0 =
√2− z0.
32
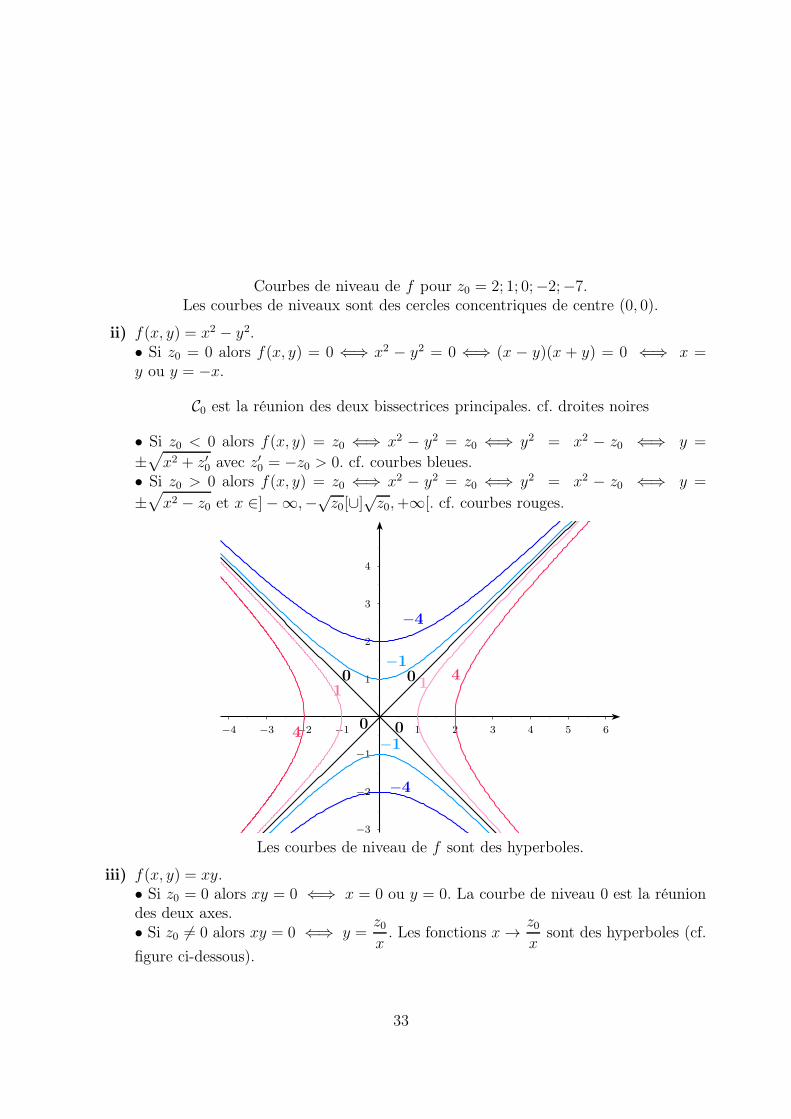
Courbes de niveau de f pour z0 = 2; 1; 0;−2;−7.Les courbes de niveaux sont des cercles concentriques de centre (0, 0).
ii) f(x, y) = x2 − y2.• Si z0 = 0 alors f(x, y) = 0 ⇐⇒ x2 − y2 = 0 ⇐⇒ (x − y)(x + y) = 0 ⇐⇒ x =y ou y = −x.
C0 est la réunion des deux bissectrices principales. cf. droites noires
• Si z0 < 0 alors f(x, y) = z0 ⇐⇒ x2 − y2 = z0 ⇐⇒ y2 = x2 − z0 ⇐⇒ y =
±√
x2 + z′0 avec z′0 = −z0 > 0. cf. courbes bleues.• Si z0 > 0 alors f(x, y) = z0 ⇐⇒ x2 − y2 = z0 ⇐⇒ y2 = x2 − z0 ⇐⇒ y =
±√
x2 − z0 et x ∈]−∞,−√z0[∪]√z0,+∞[. cf. courbes rouges.
1
2
3
4
−1
−2
−3
1 2 3 4 5 6−1−2−3−4
00
0 0
11
4
4
−4
−4
−1
−1
Les courbes de niveau de f sont des hyperboles.
iii) f(x, y) = xy.• Si z0 = 0 alors xy = 0 ⇐⇒ x = 0 ou y = 0. La courbe de niveau 0 est la réuniondes deux axes.• Si z0 6= 0 alors xy = 0 ⇐⇒ y =
z0x
. Les fonctions x→ z0x
sont des hyperboles (cf.
figure ci-dessous).
33

Les courbes de niveau de f sont des hyperboles.
6.2 Dérivées partielles d’ordre 1
Définition 6.5. Soit f une fonction numérique de deux variables définie sur Df . SoitM(a, b) ∈ Df .On considère les fonctions d’une seule variable f1 : x→ f(x, b) et f2 : y → f(a, y).Si f1 est dérivable en a, on dit que f admet une dérivée partielle d’ordre 1 en (a, b) et on
note∂f
∂x(a, b) = f ′
1(a).
Le réel∂f
∂x(a, b) est appelé dérivée partielle de f par rapport à x en (a, b).
Si f2 est dérivable en b, on dit que f admet une dérivée partielle d’ordre 1 en a et on
note∂f
∂y(a, b) = f ′
2(b).
Le réel∂f
∂y(a, b) est appelé dérivée partielle de f par rapport à y en (a, b).
Exemple 6.4. i) Soit f(x, y) = x2 + y. Soit M(a, b) ∈ IR2.
Posons f1(x) = x2 + b. ( b est fixé et x est la variable)
f ′1(x) = 2x+ 0 donc f ′
1(a) =∂f
∂x(a, b) = 2a.
Posons f2(y) = a2 + y. ( a est fixé et y est la variable)
f ′2(y) = 0 + 1 donc f ′
2(b) =∂f
∂y(a, b) = 1.
On en déduit donc :
∀(x, y) ∈ IR2,
∂f
∂x(x, y) = 2x et
∂f
∂y(x, y) = 1.
ii) Soit f(x, y) = xy. Soit M(a, b) ∈ IR2.
Posons f1(x) = xb. ( b est fixé et x est la variable)
f ′1(x) = b donc f ′
1(a) =∂f
∂x(a, b) = b.
Posons f2(y) = ay. ( a est fixé et y est la variable)
f ′2(y) = a donc f ′
2(b) =∂f
∂y(a, b) = a.
On en déduit donc :
∀(x, y) ∈ IR2,
∂f
∂x(x, y) = y et
∂f
∂y(x, y) = x.
34

6.2.1 Continuité d’une fonction de deux variables
Limite de f en un point A(a, b) :
Remarque 6.2. Soit g une fonction de la variable réelle x. Pour étudier la limx→a
g(x), on
observe le comportement de g(x) lorsque x s’approche de a par la gauche et par la droite.Si maintenant f est une fonction de deux variables réelles (x, y), on peut faire tendre (x, y)vers A(a, b) de manières très différentes :1) en fixant x = a et en faisant tendre y vers b,2) en fixant y = b et faisant tendre x vers a,3) en s’approchant de A(a, b) en tournant autour de ce point,4) en s’approchant de A(a, b) en oscillant,et on peut trouver bien d’autres façons de s’approcher de A(a, b).
Définition 6.6. On écrira que lim(x,y)→(a,b)
f(x, y) = f(a, b) si f(x, y) s’approche de f(a, b)
lorsque d(A,M) devient de plus en plus petite (avec M(x, y) ∈ Df ).On dit alors que f est continue en A(a, b).
6.2.2 Formule de Taylor d’ordre 1 ou approximation affine de f
Définition 6.7. On dit que la fonction f est de classe C1 sur E, E étant un sous-ensemblede IR2, si f admet des dérivées partielles continues en tout point (a, b) de E.
On admet les propriétés suivantes :
Propriété 6.2. Si f est de classe C1 sur E alors f est continue sur E.
Propriété 6.3. i) Les fonctions polynomiales sont de classe C1 sur IR2.
ii) Les fonctions rationnelles sont de classe C1 sur l’ensemble des points où le dénomi-nateur ne s’annule pas.
iii) Le produit d’un réel par une fonction C1 sur E est C1 sur E. La somme et le produitde deux fonctions C1 sur E est C1 sur E. Le quotient de deux fonctions C1 sur E estC1 sur l’ensemble des points de E dont le dénominateur ne s’annule pas.
iv) Si la dérivée de g : IR→ IR est continue sur I ⊂ IR et si f est une application C1 surE ⊂ IR2 telle que f(x, y) ∈ I pour tout alors (x, y) ∈ E, alors g ◦ f est de classe C1sur E.
On admet aussi le théorème suivant, qui est une généralisation du théorème de Taylorpour les fonction de deux variables :
Théorème 6.1. de Taylor à l’ordre 1 : On suppose que f est de classe C1 sur E. SoitM0(x0, y0) ∈ E tel que E contienne un disque Do ouvert centré en M0. Alors il existe unefonction ε : Do → IR qui tend vers 0 lorsque (x, y)→ (x0, y0) telle que
∀(x, y) ∈ Do
f(x, y) = f(x0, y0) +∂f∂x(x0, y0)(x− x0) +
∂f∂y(x0, y0)(y − y0) +
√
(x− x0)2 + (y − y0)2ε(x, y).
Remarque 6.3. Ce théorème s’interprète de la façon suivante : Si f est de classe C1 auvoisinage de M0(x0, y0) alors pour H = (h, k) suffisamment petit, on a
f(x0 + h, y0 + k) ≃ f(x0, y0) +∂f
∂x(x0, y0)h +
∂f
∂y(x0, y0)k. (5)
Définition 6.8. On dit que (5) est une approximation affine de f(x0 + h, y0 + k).
35
6.2.3 Plan tangent au graphe de f en (x0, y0, f(x0, y0) :
Remarquons que le graphe de la fonction affine (x, y) → f(x0, y0) +∂f∂x(x0, y0)(x −
x0) +∂f∂y(x0, y0)(y− y0) est un plan, qui d’après le théorème de Taylor s’approche de Sf au
voisinage de M0(x0, y0).
Définition 6.9. Soit f une fonction de classe C1 sur une disque ouvert centré en un pointM0 = (x0, y0). On appelle alors plan tangent (π0) en P0 = (x0, y0, f(x0, y0)) au graphe def le plan d’équation :
z = f(x0, y0) +∂f
∂x(x0, y0)(x− x0) +
∂f
∂y(x0, y0)(y − y0).
Remarque 6.4. Soit f une fonction de classe C1 sur une disque ouvert centré en un pointM0 = (x0, y0). On pose z0 = f(x0, y0).Plaçons nous dans le plan vertical (xM0z) d’équation y = y0 : La fonction f1 : x→ f(x, y0)est dérivable et la tangente à Cf1 en (x0, z0) a pour équation z = f1(x0) + f ′
1(x0)(x − x0)c’est-à-dire z = f(x0, y0)+
∂f∂x(x0, y0)(x−x0). Cette droite est l’intersection du plan tangent
(π0) avec le plan vertical y = y0.De même, si on se place dans le plan vertical (yM0z) d’équation x = x0, la fonctionf2 : y → f(x0, y) est dérivable et la tangente à Cf2 en (y0, z0) a pour équation z =f2(y0) + f ′
2(y0)(y − y0) c’est-à-dire z = f(x0, y0) +∂f∂y(x0, y0)(y − y0). Cette droite est l’in-
tersection du plan tangent (π0) avec le plan vertical x = x0.
————————– Fin du cours du jeudi 6 novembre 2014 ————
6.2.4 Rappel sur les vecteurs du plan (xOy)
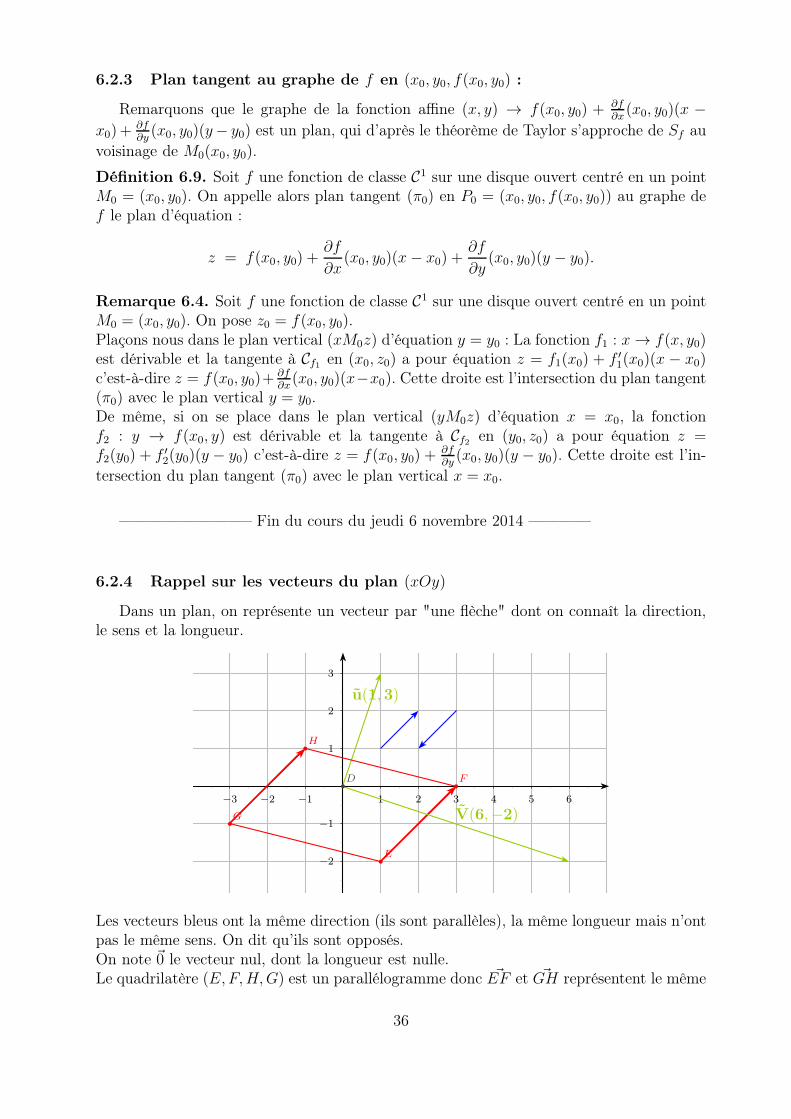
Dans un plan, on représente un vecteur par "une flèche" dont on connaît la direction,le sens et la longueur.
1
2
3
−1
−2
1 2 3 4 5 6−1−2−3
u(1, 3)
V(6,−2)
bD
bE
bF
bG
bH
Les vecteurs bleus ont la même direction (ils sont parallèles), la même longueur mais n’ontpas le même sens. On dit qu’ils sont opposés.On note ~0 le vecteur nul, dont la longueur est nulle.Le quadrilatère (E, F,H,G) est un parallélogramme donc ~EF et ~GH représentent le même
36

vecteur. On dit que les vecteurs ~EF et ~GH sont égaux.Dans le repère (x0y) tout vecteur du plan, est défini à l’aide de ses coordonnées. Sur la
figure le vecteur ~u a pour coordonnées (1, 3), on écrit aussi ~u(13).
Définition 6.10. On définit la somme de deux vecteurs ~u(x, y) et ~v(x′, y′) par le vecteurnoté ~u+ ~v de coordonnées (x+ x′, y + y′).On définit le produit d’un réel λ par un vecteur ~u(x, y) le vecteur noté λ ·~u de coordonnées(λx, λy).
Propriété 6.4. Deux vecteurs ~u et ~v ont la même direction (on dit aussi qu’ils sont coli-néaires) si et seulement si il existe un coefficient réel λ tel que ~u = λ~v ou ~v = λ~u.
On a aussi la propriété suivante : Deux vecteurs ~u(xy) et ~v(
x′
y′) ont la même direction
si et seulement si xy′ − yx′ = 0. (produit en croix lorsque les coordonnées sont écrites encolonne).
Propriété 6.5. Les vecteurs ~u(x, y) et ~v(x′, y′) sont orthogonaux (on dit aussi perpendi-culaires) si et seulement si
xx′ + yy′ = 0.
Exemple 6.5. Sur la figure ci-contre, les vecteurs ~u(1, 3) et ~v(6,−2) sont orthogonaux :en effet 1× 6 + 3× (−2) = 0.
Propriété 6.6. Dans IR2, (b,−a) est un vecteur perpendiculaire à u(a, b).
Preuve. Evident car ba + (−a)b = 0.
Propriété 6.7. Soit D une droite du plan (xOy) d’équation ax + by + c = 0 alors unvecteur directeur de la droite D est ~u(−b, a).De plus si l’équation de D s’écrit y = αx+ β alors un vecteur directeur de D est ~u(1, α).
Preuve. D : ax + by + c = 0. Soit M0(x0, y0) un point de D alors ax0 + by0 + c = 0 d’oùc = −ax0− by0. Alors M(x, y) ∈ D ⇐⇒ ax+ by+(−ax0− by0) = 0⇐⇒ a(x−x0)+ b(y−y0) = 0 ⇐⇒ −b(y − y0)− a(x− x0) = 0. Posons ~u(−b, a) alors la dernière égalité signifie
que les vecteur ~u et ~M0M sont colinéaires. Cela signifie que le vecteur ~u estun vecteurdirecteur de D.Dans le cas particulier où y = αx+β alors D : αx−1×y+β = 0. Donc le vecteur directeurest ~u(−(−1), α). D’où le résultat.
6.2.5 Gradient de f en un point (x0, y0)
Définition 6.11. Le vecteur, appelé gradient de f au point (x0, y0) et noté ∇f(x0, y0) est
le vecteur de composantes (∂f
∂x(x0, y0),
∂f
∂y(x0, y0)).
Exemple 6.6. Soit f telle que f(x, y) = x2y. Alors∂f
∂x(x, y) = 2xy et
∂f
∂y(x, y) = x2.
Donc ∇f(1, 2) = (2× 1× 2, 12) = (4, 1).
On admet la propriété suivante, qui fait appel au théorème des fonctions implicites(hors programme).
37

Propriété 6.8. Soit (x0, y0) ∈ IR2 telle que f soit C1 sur un disque D0 ouvert centré en(x0, y0). Supposons que le vecteur ∇f(x0, y0) 6= ~0. Alors ∇f(x0, y0) est perpendiculaire (⊥)au vecteur directeur de la tangente de la courbe de niveau de f en (x0, y0).
Conséquence : On pose z0 = f(x0, y0). On note Cz0 la courbe de niveau de f en (x0, y0).Un point M(x, y) appartient à la tangente à Cz0 en (x0, y0) si et seulement si le vecteur
~M0M(x− x0
y − y0) est orthogonal à ∇f(x0, y0)(
∂f∂x(x0, y0)
∂f∂y(x0, y0)
), d’après la propriété précédente.
Or d’après la propriété (6.5), les deux vecteurs sont orthogonaux si et seulement si (x −x0)
∂f∂x(x0, y0) + (y − y0)
∂f∂x(x0, y0) = 0.
L’équation de la tangente T0 à la courbe de niveau de f en (x0, y0) est donc :
(T0) : (x− x0)∂f
∂x(x0, y0) + (y − y0)
∂f
∂x(x0, y0) = 0
Illustration : On reprend l’exemple précédent et on se place au point M0 = (1, 2). f(1, 2) =2. La courbe de niveau de f issue de (1, 2) est la courbe d’équation x2y = 2, c’est-à-dire
y =2
x2, c’est-à-dire y = g(x) avec g(x) =
2
x2.
L’équation de la tangente (T0) à Cg en x = 1 est y = g′(1)(x− 1) + g(1).
g(x) = 2x−2, donc g′(x) = 2× (−2)x−2−1 =−4x3
. D’où g′(1) = −4.Donc (T0) : y = 2 +−4(x− 1).Un vecteur directeur de (T0) est donc ~u(1,−4) (cf. propriété 6.7).D’autre part ∇f(1, 2) = (4, 1) et on a 4× 1 + 1× (−4) = 0 donc ∇f(1, 2) ⊥ ~u.
1
2
3
4
5
−1
−2
1 2 3 4 5 6−1−2−3
Cg : f(x, y) = 2Courbe de niveau 2
∇f(1, 2)
T0 :tangente à la courbe de niveau 2 de f
b
6.3 Dérivées partielles d’ordre 2
Définition 6.12. On appelle dérivées partielles d’ordre 2 (lorsqu’elles existent) de f , lesdérivées des 4 fonctions suivantes :
g1 : x→∂f
∂x(x, y), g2 : y →
∂f
∂x(x, y), g3 : x→
∂f
∂y(x, y), g4 : y →
∂f
∂y(x, y).
38

g′1(x) se note∂2f
∂x2(x, y), g′2(y) se note
∂2f
∂y∂x(x, y),
g′3(x) se note∂2f
∂x∂y(x, y) et g′4(y) se note
∂2f
∂y2(x, y).
Définition 6.13. Soit E ⊂ IR2. On dit qu’une fonction f est de classe C2 sur E, si f admet
des dérivées partielles d’ordre 2 continues sur E.
Exemple 6.7. On considère la fonction f telle que f(x, y) =x
y. Le domaine de définition
de f est l’ensemble Df des points de IR2 ( : le plan x0y) privé de l’axe des abscisses ( :ladroite d’équation y = 0). La fonction f est de classe C2 sur son domaine de définition.Pour tout (x, y) ∈ Df , on a
∂f
∂x(x, y) =
1
y(x)′ =
1
y.1 =
1
y
∂f
∂y(x, y) = x(
1
y)′ = x(
−1y2
) =−xy2
∂2f
∂x2(x, y) = 0 car ∂f
∂x(x, y) ne dépend pas de x
∂2f
∂y∂x(x, y) =
∂
∂y
∂f
∂x(x, y) = (
1
y)′ =
−1y2
∂2f
∂x∂y(x, y) =
∂
∂x(−xy2
) =−1y2
(x)′ =−1y2
∂2f
∂y2(x, y) =
∂
∂y(−xy2
) = −x(y−2)′
= −x · (−2)y−2−1 =2x
y3
Dans l’exemple précédent, on remarque que∂2f
∂x∂y(x, y) =
∂2f
∂y∂x(x, y). En fait ce résul-
tat est général, si f est suffisamment régulière. Nous l’énonçons dans le théorème suivant.
Théorème 6.2. de SchwartzSoit f une fonction de classe C2 sur E ⊂ IR
2. Alors on a l’égalité suivante :
∀(x, y) ∈ E,∂2f
∂x∂y(x, y) =
∂2f
∂y∂x(x, y)
Donc peut importe, l’ordre dans lequel on dérive la fonction f . On peut dériver d’abordpar rapport à x puis par rapport à y ou dériver par rapport à y puis par rapport à x, onobtiendra le même résultat.—————————- Fin du cours du 13 novembre —————————————–
7 Optimisation d’une fonction numérique de deux va-
riables
On cherche à optimiser une fonction de deux variables sur un ensemble donné, c’est-à-dire à trouver les points de cet ensemble où la fonction atteint des valeurs extrêmes, lesvaleurs les plus grandes dans le cas d’un maximum (par exemple si f est le profit qu’uneentreprise réalise lorsqu’elle produit deux produits), et les plus petites dans le cas d’unminimum (par exemple si f est le coût de production de deux produits).
Définition 7.1. Soit E ⊂ IR2.
i) On dit que la fonction f présente un maximum global sur E en M0 = (x0, y0) si
∀(x, y) ∈ E, f(M) ≤ f(M0).
39

ii) On dit que la fonction f présente un minimum global sur E en M0 = (x0, y0) si
∀M(x, y) ∈ E, f(M) ≥ f(M0).
iii) On dit que la fonction f présente un maximum local en M0 = (x0, y0) si il existeun disque DM0 ouvert (non vide) centré en M0 tel que
∀(x, y) ∈ DM0 , f(M) ≤ f(M0).
iv) On dit que la fonction f présente un minimum local en M0 = (x0, y0) si il existeun disque DM0 ouvert (non vide) centré en M0 tel que
∀(x, y) ∈ DM0 , f(M) ≥ f(M0).
7.1 théorème de Taylor à l’odre 2
Enonçons d’abord quelques définitions et notations qui rendront l’écriture du théorèmede Taylor plus simple.
Définition 7.2. différentielle de f au point M0(x0, y0)Soit f une fonction de classe C1 sur E et M0 ∈ à l’intérieur de E, on appelle différentiellede f au point M0, l’application notée dfM0 telle que
dfM0
IR2 → IR
(h, k) → ∂f
∂x(M0)× h+
∂f
∂y(M0)× k.
Définition 7.3. Soit f une fonction de classe C2 sur E ⊂ IR2. Soit M0 ∈ à l’intérieur de E.
On appelle matrice hessionne de f au point M0 = (x0, y0) le tableau à deux colonneset deux lignes suivant :
Hess(f)(M0) =
∂2f
∂x2(M0)
∂2f
∂x∂y(M0)
∂2f
∂y∂x(M0)
∂2f
∂y2(M0)
.
En utilisant les notations de Monge, on peut écrire la matrice hessienne de f en M0 sousla forme suivante :
Hess(f)(M0) =
r s
s t
,
où r =∂2f
∂x2(M0), s =
∂2f
∂x∂y(M0), t =
∂2f
∂y2(M0).
Définition 7.4. de la Forme quadratique associée à Hess(f)(M0) :Soient f une fonction de classe C2 sur E ⊂ IR2 et M0 ∈ à l’intérieur de E. La fonctionquadratique associée à la hessienne de f au point M0 est la fonction notée, d2fM0 des deuxvariables h et k telle que
∀(h, k) ∈ IR2, d2fM0(h, k) =
∂2f
∂x2(M0)h
2 + 2∂2f
∂x∂y(M0)hk +
∂2f
∂y2(M0)k
2.
40

On peut maintenant énoncer la formule de Taylor à l’ordre 2 :
Théorème 7.1. Formule de Taylor à l’odre 2 :Soient f une fonction de classe C2 sur E ⊂ IR2 et M0 ∈ à l’intérieur de E. Alors il existeun disque ouvert, noté D ⊂ E, centré en M0 et une fonction ε tel que lim
(h,k)→(0,0)ε(h, k) = 0,
tels que ∀M(x0 + h, y0 + k) ∈ D,
f(x0 + h, y0 + k) = f(M0) + dfM0(h, k) +1
2d2fM0(h, k) + (h2 + k2)ε(h, k). (6)
Conséquence : La formule (6) permet d’approcher f par la fonction polynomiale dusecond degré : Pour h et k petits devant x0 et y0, on a
f(x0 + h, y0 + k) ≃ f(M0) + (rh+ tk) +1
2(rh2 + 2shk + tk2).
Exemple 7.1. Calcul approché de f(1, 01, 0, 01) :Soit f telle que f(x, y) = x3 − 3y4. f(1, 0) = 1.
∇f(x, y) = (∂f∂x(x, y) = 3x2
∂f∂y(x, y) = −12y3 ) Hess(f)(x, y) =
(6x 00 −36y2
)
∇f(1, 0) = (30) Hess(f)(1, 0) =
(6 00 0
)
.
Donc d’après la formule de Taylor, on a pour h = k = 0.01 :
f(1.01, 0.01) ≃ 1 + 3× 0.01 + 0 +1
2[6× 0.012 + 0+ 0] ≃ 1 + 3 · 10−2 +
6
2· 10−4 ≃ 1.0303.
7.2 Condition nécessaire d’extremum local ou global
Supposons que f admette un minimum local ou global en M0 = (x0, y0), alors f(M) ≥f(M0) pour tout M dans un disque de rayon r (r > 0) centré en M0. Donc en particulierf(x, y0) ≥ f(M0) pour tout x ∈]x0 − r, x0 + r[. Donc l’application fy0 telle que fy0(x) =f(x, y0) est une fonction d’une variable qui admet un minimum local en x0. Or on a vu au
théorème 5.6 qu’alors f ′y0(x0) = 0. D’autre part, f ′
y0(x0) =
∂f
∂x(x0, y0). Donc nécessairement,
si f présente un extremum local (ou global) alors∂f
∂x(x0, y0) = 0. Et de même, si on fixe
x0 on obtient∂f
∂y(x0, y0) = 0.
Théorème 7.2. Condition nécessaire d’extremumSoit f une fonction de classe C1 sur E ⊂ IR
2 et soit M0 ∈ à l’intérieur de E. Alors unecondition nécessaire pour que f présente un extremum en M0(x0, y0) est
∇f(M0) = ~0.
Définition 7.5. Tout point M tel que ∇f(M) = ~0 est appelé point critique ou pointstationnaire de f .
41
Exemple 7.2. i) Soit f telle que f(x) = x2 + y2. ∇f(M) = (2x2y
). Donc ∇f(M) =
~0 ⇐⇒ x = y = 0. Le seul point critique est donc le point (0, 0). Or f(0, 0) = 0 etx2 + y2 ≥ 0 = f(0, 0).Dans cet exemple, le point critique (0, 0) correspond à un minimum de f .
ii) Soit f telle que f(x) =√
1− x2 − y2. Le domaine de définition de f est le disquefermé centré en (0, 0) et de rayon 1.
∇f(M) = (− 2x
2√
1−x2−y2= −x√
1−x2−y2
−y√1−x2−y2
). Donc ∇f(M) = ~0⇐⇒ x = y = 0.
Le seul point critique est donc le point (0, 0). Or f(0, 0) = 1 et 1 − x2 − y2 ≤ 1 =f(0, 0).Dans cet exemple, le point critique (0, 0) correspond à un maximum de f .
iii) Soit f telle que f(x) = x2−y2. ∇f(M) = (2x−2y ). Donc ∇f(M) = ~0⇐⇒ x = y = 0.
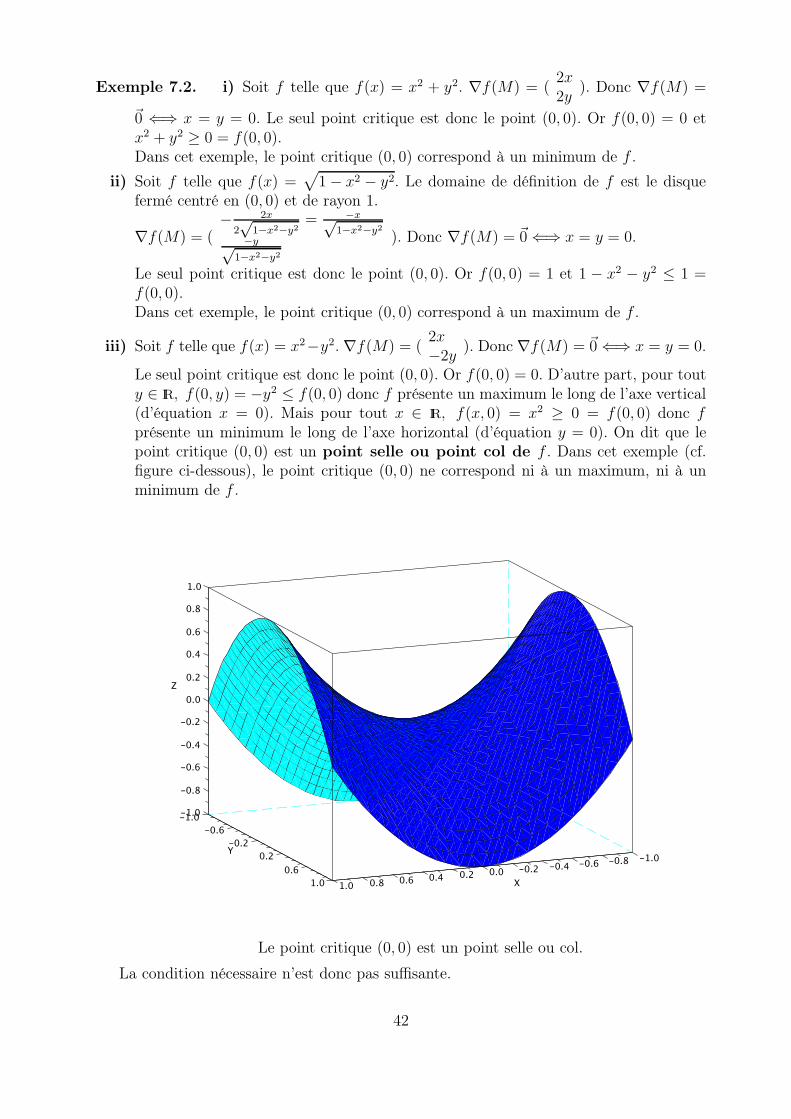
Le seul point critique est donc le point (0, 0). Or f(0, 0) = 0. D’autre part, pour touty ∈ IR, f(0, y) = −y2 ≤ f(0, 0) donc f présente un maximum le long de l’axe vertical(d’équation x = 0). Mais pour tout x ∈ IR, f(x, 0) = x2 ≥ 0 = f(0, 0) donc fprésente un minimum le long de l’axe horizontal (d’équation y = 0). On dit que lepoint critique (0, 0) est un point selle ou point col de f . Dans cet exemple (cf.figure ci-dessous), le point critique (0, 0) ne correspond ni à un maximum, ni à unminimum de f .
Le point critique (0, 0) est un point selle ou col.
La condition nécessaire n’est donc pas suffisante.
42

Définition 7.6. Tout point critique M0 de f qui admet un maximum local le long d’unedroite passant par M0 et un minimum local le long d’une autre droite passant par M0 estappelé point selle ou point col. La fonction f ne présente donc pas d’extremum localen un point selle.
7.3 Condition suffisante d’extremum local
Considérons un point critique M0 de f .On remarque alors que si d2fM0 : (h, k) > 0 pour tout (h, k) 6= (0, 0) alors f présente unminimum local en M0 et que si d2fM0 : (h, k) < 0 pour tout (h, k) 6= (0, 0) alors f présenteun maximum local en M0.Par contre, si d2fM0 : (h, k) change de signe selon les valeurs de h et k alors f présente unpoint col en M0.Le dernier cas à envisager est le cas, où d2fM0 : (h, k) garde un signe constant pour tout(h, k) mais s’annule en plusieurs valeurs (h, k) autres que (0, 0). dans ce cas, on ne peut
pas conclure car on ne peut pas déterminer le signe de1
2d2fM0(h, k) + (h2 + k2)ε(h, k).
7.3.1 Signe de la forme quadratique d2fM0 : (h, k) ∈ IR2 → rh2 + 2shk + tk2
Remarquons d’abord que Q(0, 0) = 0.Supposons que k 6= 0 alors en posant H = h
kon obtient Q(h, k) = rk2H2 + 2sk2H + tk2 =
k2(rH2 + 2sH + t).Le signe de Q(h, k) ne dépend que du signe de rH2 + 2sH + t qui est un polynôme en Hde degré inférieur ou égal à 2.
i) Supposons que r 6= 0. On pose ∆ = (2s)2 − 4rt = −4(rt− s2).Si (rt− s2) > 0, ∆ < 0 donc le signe de rH2 + 2sH + t est du signe de r pour toutH ∈ IR. Donc Q(h, k) est du signe de r pour tout (h, k) ∈ IR× IR⋆. Q(h, 0) = rh2 doncQ(h, 0) est du signe de r pour tout h 6= 0. Donc Q(h, k) est du signe de r pour tout(h, k) ∈ IR× IR− (0, 0) et s’annule uniquement en (0, 0).Si (rt− s2) < 0, ∆ > 0 alors rH2 + 2sH + t change de signe en fonction de H . Parexemple, Q(1, 0) = r et Q(−s
r, 1) = s2−2s2+tr
r= rt−s2
r, qui est du signe de −r.
Si rt − s2 = 0 alors rH2 + 2sH + t = r(H − −sr)2 d’où Q(h, k) = r(h + s
rk)2 est du
signe de r mais s’annule sur la droite d’équation h + srk = 0.
ii) Supposons que r = 0 et t 6= 0, on se retrouve dans la même situation que dans lecas précédent (i). En effet, les rôles de h et k d’une part et r et t d’autre part sontsymétriques.
iii) Supposons que r = t = 0 et s 6= 0, alors Q(h, k) = 2shk. qui change de signe selonles signe de h et k et qui s’annule sur les axes, c’est-à-dire sur la droite d’équationh = 0 (axe verticale) et sur la droite d’équation k = 0 (axe horizontale). Si r = t = 0,alors rt− s2 = −s2 < 0 (si s 6= 0). On retrouve donc la même conclusion que dans lecas r 6= 0.
iv) r = t = s = 0, alors Q est alors l’application nulle.
Théorème 7.3. Soit Q la forme quadratique suivante : Q(h, k) = rh2 + 2shk + tk2.
i) Si rt− s2 > 0 alors
43

(a) si r > 0 alors Q(h, k) > 0 pour tout (h, k) ∈ IR2\(0, 0) et Q(h, k) ne s’annuleque si h = k = 0.
(b) si r < 0 alors Q(h, k) < 0 pour tout (h, k) ∈ IR2\(0, 0) et Q(h, k) ne s’annuleque si h = k = 0.
ii) Si rt− s2 = 0 alors
(a) si r ≥ 0 alors Q(h, k) ≥ 0 pour tout (h, k) ∈ IR2 et Q(h, k) s’annule en une
infinité de couples (h, k).
(b) si r ≤ 0 alors Q(h, k) ≤ 0 pour tout (h, k) ∈ IR2 et Q(h, k) s’annule en une
infinité de couples (h, k).
iii) Si rt− s2 < 0 alors Q(h, k) change de signe suivant les valeurs de h et k.
7.3.2 Théorème donnant une condition suffisante d’extremum
De ce théorème, on déduit immédiatement le théorème donnant les conditions suffisantespour avoir un extremum.
Théorème 7.4. Condition suffisante d’extremum localSoient f une fonction de classe C2 sur E ∈ IR
2 et M0 un point critique de f .
i) Si rt− s2 > 0 alors
(a) si r > 0 alors f présente un minimum local en M0.
(b) si r < 0 alors f présente un maximum local en M0.
ii) Si rt − s2 = 0 alors on ne peut rien conclure et une étude complémentaire est alorsnécessaire.
iii) Si rt−s2 < 0 alors M0 est un point col ou point selle et f n’admet donc ni maximum,ni minimum local en M0.
———————– Fin du cours du 20 novembre ————————————
Exemple 7.3. i) Une firme produit un unique bien pour deux types de consomateurs.Q1 étant la quantité en milliers de produits vendus aux consommateurs de type 1et Q2 la quantité de produits en milliers vendus aux consommateurs de type 2, lesfonctions inverses sont données par :
g1(Q1) = 50− 5Q1 g2(Q2) = 100− 10Q2.
où g1(Q1) (respectivement g2(Q2)) est le prix de vente du produit vendu à un consom-mateur de type 1 (respectivement de type 2).La fonction coût est donnée par C(Q1, Q2) = 90 + 20(Q1 +Q2).Calcul du profit P :
P (Q1, Q2) = Q1g1(Q1) +Q2g2(Q2)− C(Q1, Q2)= Q1(50− 5Q1) +Q2(100− 10Q2)− (90 + 20Q1 + 20Q2)= −5Q2
1 − 10Q22 + 30Q1 + 80Q2 − 90.
Recherche du profit maximal :
Calcul du gradient de P : ∇P (Q1, Q−2) = (∂P
∂Q1
,∂P
∂Q2
) = (−10Q1+30,−20Q2+
80).
44
Recherche des points critiques (ou points stationnaires) : ∇P (Q1, Q2) =~0 ⇐⇒ −10Q1 + 30 = 0 et − 20Q2 + 80 = 0. ⇐⇒ Q1 = 3 et Q2 = 4.Calcul de la matrice Hessienne :
Hess(P )(Q1, Q2) =
∂2P
∂Q21
∂2P
∂Q1∂Q2
∂2P
∂Q1∂Q2
∂2P
∂Q22
=
−10 0
0 −20
.
Dans cet exemple, la matrice Hessienne est particulière car elle est constante (nedépend ni de Q1, ni de Q2).Calcul du Hessien de P : (produit en croix de la matrice Hessienne) Hessien(P )(Q1, Q2) =(−10).(−20)− 0 = 200 > 0.Nature du point critique : Hessien(P )(3, 4) = 200 donc f(3, 4) est un extremumlocal. De plus r = −10 < 0 donc P (3, 4) = est un maximum localLe maximum est-il global ? :
P (Q1, Q2)− P (3, 4) = −5Q21 − 10Q2
2 + 30Q1 + 80Q2 − 90− (−5(3)2 − 10(4)2 + 30(3) + 80(4)− 90)= −5(Q2
1 − 32)− 10(Q22 − 42) + 30(Q1 − 3) + 80(Q2 − 4)
= (Q1 − 3)(−5Q1 − 5(3) + 30) + (Q2 − 4)(−10Q2 − 10(4) + 80)= (Q1 − 3)(−5Q1 + 15) + (Q2 − 4)(−10Q2 + 40)= −5(Q1 − 3)2 − 10(Q2 − 4)2 ≤ 0 ∀(Q1, Q2) ∈ IR2.
Le profit est maximal sur IR2+∗ lorsque Q1 = 3 milliers de consommateurs de type 1et Q2 = 4 milliers de consommateurs de type 2.
ii) Recherche des extrema locaux puis globaux de la fonction f telle que f(x, y) =x3 + y3 − 3xy.Recherche des points critiques :
∇f(x, y) =
∂f
∂x(x, y) = 3x2 − 3y
∂f
∂y(x, y) = 3y2 − 3x
.
(x, y) est un point critique de f ⇐⇒ ∇f(x, y) = ~0 ⇐⇒{
3(x2 − y) = 0et 3(y2 − x) = 0
⇐⇒{
x2 = y(x2)2 − x = 0
⇐⇒{
x2 = yx(x3 − 1) = 0
⇐⇒{
x2 = yx = 0 ou x = 1
⇐⇒ (x, y) = (0, 0) ou (1, 1).
Matrice Hessienne de f : Hess(f)(x, y) =
∂2f
∂x2(x, y)
∂2f
∂x∂y(x, y)
∂2f
∂x∂y(x, y)
∂2f
∂y2(x, y)
=
6x −3
−3 6y
.
D’où Hessien(f) = rt− s2 (produit en croix)= 36xy − 9 = 9(4xy − 1).Nature des points critiques :
(a) Cas O = (0, 0) : Hessien(f)(0, 0) = −9 < 0 donc O est un point selle donc n’estpas un extremum.
45

(b) Cas A = (1, 1) : Hessien(f)(1, 1) = 36 > 0. De plus r = 6 > 0 donc f admetun minimum local en A, égal à f(1, 1) = −1.lim
x→−∞f(x, 1) = lim
x→−∞x3 +1− 3x = lim
x→−∞x3(1 + 1/x3− 3/x2) = −∞× (1 + 0+
0) = −∞. Donc f prend de grandes valeurs négatives et donc −1 n’est pas unminimum global.
7.4 Cas particuliers des fonctions convexes ou concaves
Définition 7.7. On appelle ensemble convexe de IR2, tout sous-ensemble C de IR2 tel quepour tout couple (A,B) de points de C, le segment [A,B] est inclus dans C.
Un disque, l’intérieur d’un carré, d’un rectangle, d’un triangle sont des sous-ensemblesconvexes.
1
2
3
4
−1
−2
1 2 3 4 5 6−1−2−3−4
bF
bG
Ce polygone n’est pas convexe car le segment [E, F ] n’est pas inclus dans le polygone.
Définition 7.8. La fonction f de deux variables étant de classe C1 sur un convexe C deIR2, on dit que la fonction est convexe sur C si la surface de f est au-dessus de tous sesplans tangents, c’est-à-dire si
∀M = (x, y) ∈ C, ∀M0 = (x0, y0) ∈ C, f(M) ≥ f(M0)+∂f
∂x(M0)(x−x0)+
∂f
∂y(M0)(y−y0).
Définition 7.9. La fonction f de deux variables étant de classe C1 sur un convexe C deIR
2, on dit que la fonction est concave sur C si la surface de f est au-dessous de tousses plans tangents, c’est-à-dire si
∀M = (x, y) ∈ C, ∀+0 = (x0, y0) ∈ C, f(M) ≤ f(M0)+∂f
∂x(M0)(x−x0)+
∂f
∂y(M0)(y−y0).
46
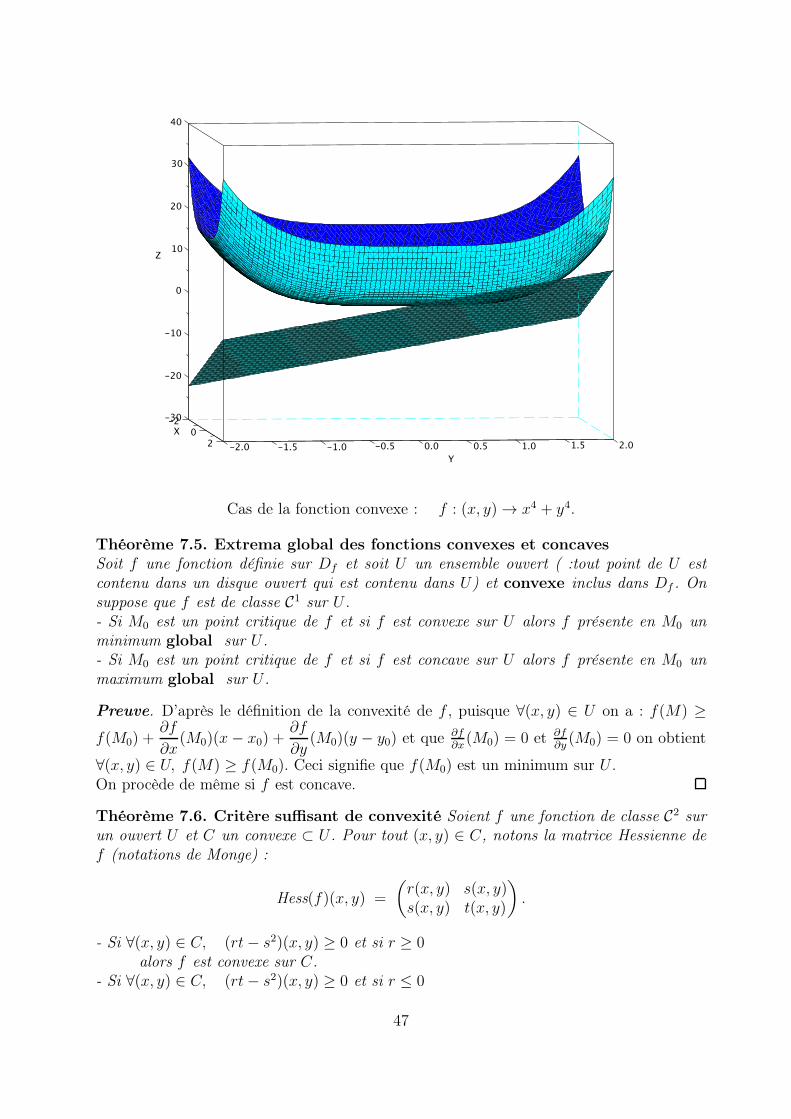
Cas de la fonction convexe : f : (x, y)→ x4 + y4.
Théorème 7.5. Extrema global des fonctions convexes et concavesSoit f une fonction définie sur Df et soit U un ensemble ouvert ( :tout point de U estcontenu dans un disque ouvert qui est contenu dans U) et convexe inclus dans Df . Onsuppose que f est de classe C1 sur U .- Si M0 est un point critique de f et si f est convexe sur U alors f présente en M0 unminimum global sur U .- Si M0 est un point critique de f et si f est concave sur U alors f présente en M0 unmaximum global sur U .
Preuve. D’après le définition de la convexité de f , puisque ∀(x, y) ∈ U on a : f(M) ≥f(M0) +
∂f
∂x(M0)(x− x0) +
∂f
∂y(M0)(y − y0) et que ∂f
∂x(M0) = 0 et ∂f
∂y(M0) = 0 on obtient
∀(x, y) ∈ U, f(M) ≥ f(M0). Ceci signifie que f(M0) est un minimum sur U .On procède de même si f est concave.
Théorème 7.6. Critère suffisant de convexité Soient f une fonction de classe C2 surun ouvert U et C un convexe ⊂ U . Pour tout (x, y) ∈ C, notons la matrice Hessienne def (notations de Monge) :
Hess(f)(x, y) =
(r(x, y) s(x, y)s(x, y) t(x, y)
)
.
- Si ∀(x, y) ∈ C, (rt− s2)(x, y) ≥ 0 et si r ≥ 0alors f est convexe sur C.
- Si ∀(x, y) ∈ C, (rt− s2)(x, y) ≥ 0 et si r ≤ 0
47
alors f est concave sur C.- Si il existe au moins un point (x, y) ∈ C tel que (rt − s2)(x, y) < 0 alors f n’est niconvexe, ni concave sur C.
Exemple 7.4. Reprenons l’exemple 7.3 (i) : On a (rt− s2)(x, y) = 200 pour tout (x, y) ∈IR2, de plus r(x, y) = −10 < 0 donc f est concave sur IR2 donc le point critique (3, 4) estnécessairement un maximum global sur IR2.
Attention : Il existe plein de fonctions de deux variables qui ne sont ni convexes, ni concaves.
8 Système Linéaire
×2
+ oo
1
<
<
<
<
<
<
<
<
<
<
<
<
<
<
<
<
<
<
λ
<
<
<
<
<
<
<
<
<
<
<
<
0 0
0
0
λ
0 0 1
m
y
af +
y y
a b cd e fg h i
←−af
+
←−−−−
titi
toto
48