Embed Size (px)
Citation preview
Thème : Observer : ondes et matière
Caractéristiques et propriétés des ondes
Effet Doppler
Type de ressources :
Notions et contenus : Effet Doppler.
Compétence travaillée ou évaluée :
- Mettre en oeuvre une démarche expérimentale pour mesurer une vitesse en utilisant l’effet
Doppler.
- Exploiter l’expression du décalage Doppler de la fréquence dans le cas des faibles vitesses.
- Identifier les différentes sources d'erreur (de limite à la précision).
Nature de l’activité : Activité expérimentale : expérience de cours et de TP
Résumé (en 5 lignes au plus) :
Mise en évidence qualitative de l’effet Doppler par l’écoute d’un document sonore.
Mesure de vitesse en mesurant le décalage Doppler de deux manières :
- Traitement statistique du décalage en fréquence de deux signaux sonores.
- Détermination du décalage en fréquence à l’aide d’un montage électronique couplé à un
système d’acquisition.
Mots clefs : Doppler
Académie où a été produite la ressource : Nancy-Metz
Effet Doppler pour les ondes sonores et ultra sonores :
Mise en évidence qualitative :
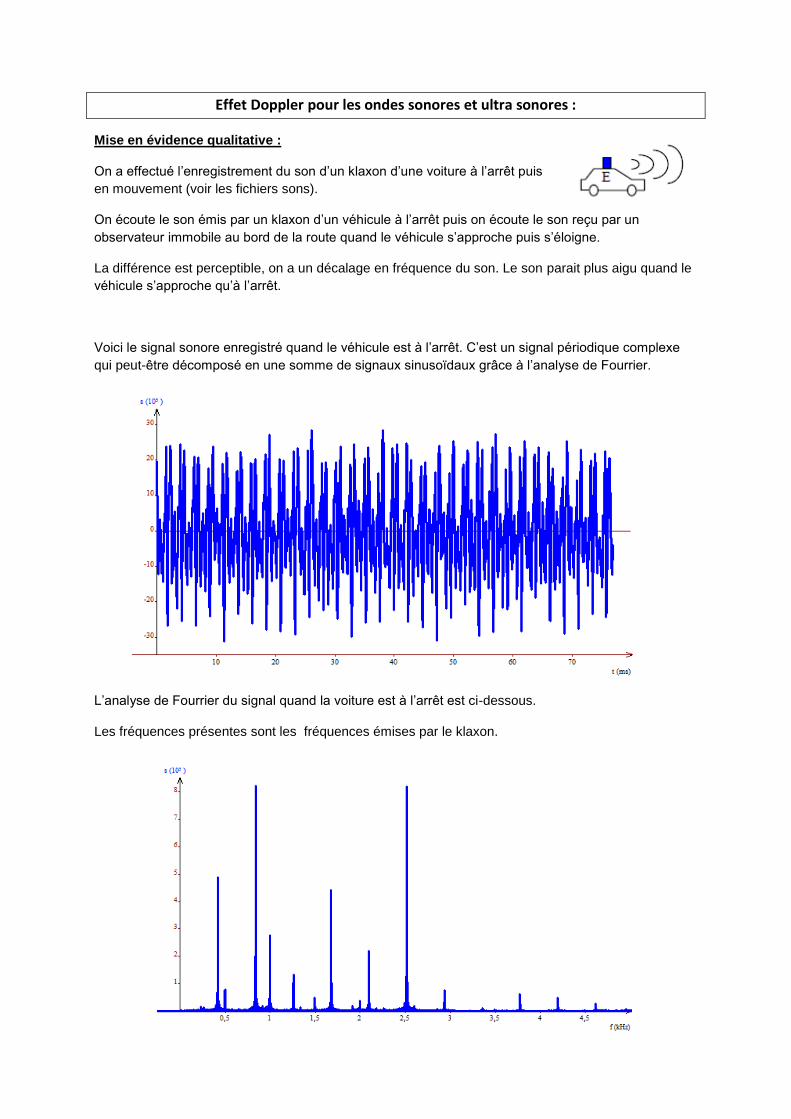
On a effectué l’enregistrement du son d’un klaxon d’une voiture à l’arrêt puis
en mouvement (voir les fichiers sons).
On écoute le son émis par un klaxon d’un véhicule à l’arrêt puis on écoute le son reçu par un
observateur immobile au bord de la route quand le véhicule s’approche puis s’éloigne.
La différence est perceptible, on a un décalage en fréquence du son. Le son parait plus aigu quand le
véhicule s’approche qu’à l’arrêt.
Voici le signal sonore enregistré quand le véhicule est à l’arrêt. C’est un signal périodique complexe
qui peut-être décomposé en une somme de signaux sinusoïdaux grâce à l’analyse de Fourrier.
L’analyse de Fourrier du signal quand la voiture est à l’arrêt est ci-dessous.
Les fréquences présentes sont les fréquences émises par le klaxon.
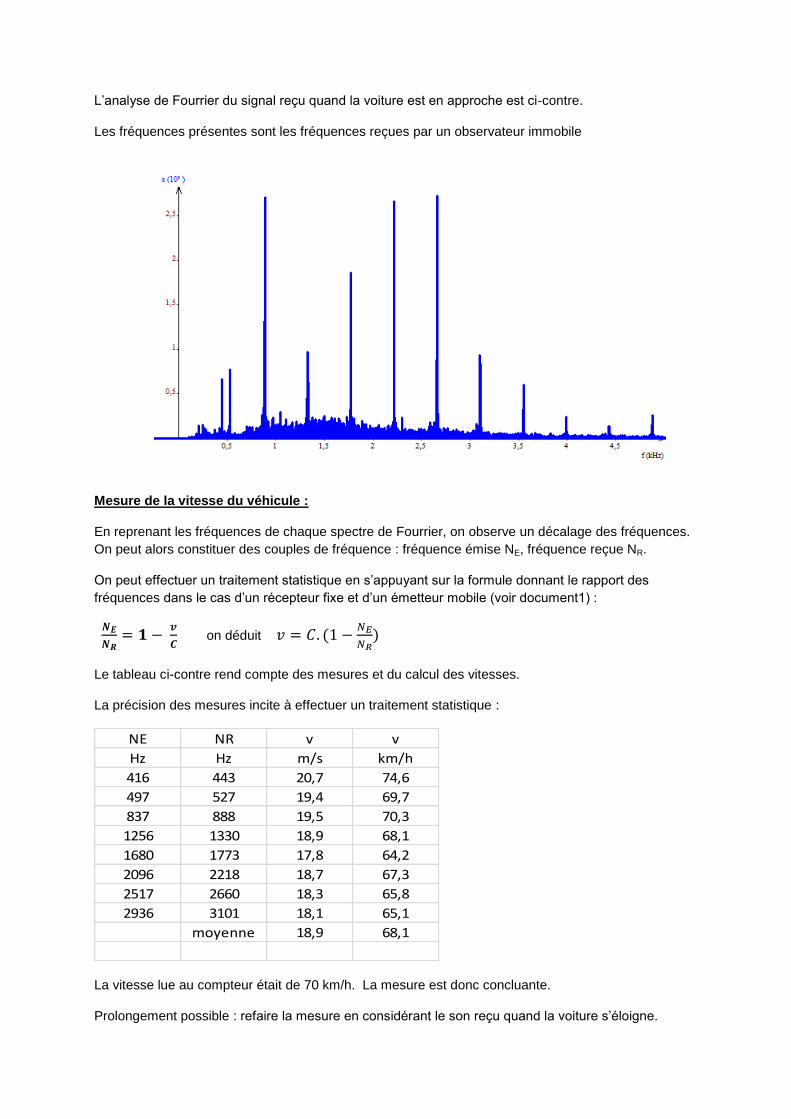
L’analyse de Fourrier du signal reçu quand la voiture est en approche est ci-contre.
Les fréquences présentes sont les fréquences reçues par un observateur immobile
Mesure de la vitesse du véhicule :
En reprenant les fréquences de chaque spectre de Fourrier, on observe un décalage des fréquences.
On peut alors constituer des couples de fréquence : fréquence émise NE, fréquence reçue NR.
On peut effectuer un traitement statistique en s’appuyant sur la formule donnant le rapport des
fréquences dans le cas d’un récepteur fixe et d’un émetteur mobile (voir document1) :
on déduit
Le tableau ci-contre rend compte des mesures et du calcul des vitesses.
La précision des mesures incite à effectuer un traitement statistique :
NE NR v v
Hz Hz m/s km/h
416 443 20,7 74,6
497 527 19,4 69,7
837 888 19,5 70,3
1256 1330 18,9 68,1
1680 1773 17,8 64,2
2096 2218 18,7 67,3
2517 2660 18,3 65,8
2936 3101 18,1 65,1
moyenne 18,9 68,1
La vitesse lue au compteur était de 70 km/h. La mesure est donc concluante.
Prolongement possible : refaire la mesure en considérant le son reçu quand la voiture s’éloigne.

Remarque : l’écart entre les fréquences était suffisant pour pouvoir être mesuré. Dans le cas
où ce n’est pas possible, on peut utiliser le double effet Doppler développé ci-dessous.
Double effet Doppler, vélocimétrie Doppler :
Un écran se déplace à la vitesse constante v par rapport à un ensemble fixe {émetteur E, récepteur
R} d’ondes ultrasonores. L’émetteur génère des ondes sinusoïdales de fréquence NE.
D’après le 1.1 du document 1 la fréquence N du signal reçu par l’écran est :
L’écran réfléchit ce signal (de fréquence N). D’après le 2.1 du document 1, la fréquence NR des
signaux reçus par le récepteur est :
Si
est petit, on peut admettre que (
)
On a donc (
) d’où
)
NE = 40 kHz, mesurer NR-NE permettrait de déterminer la vitesse de l’écran.
E
R
v
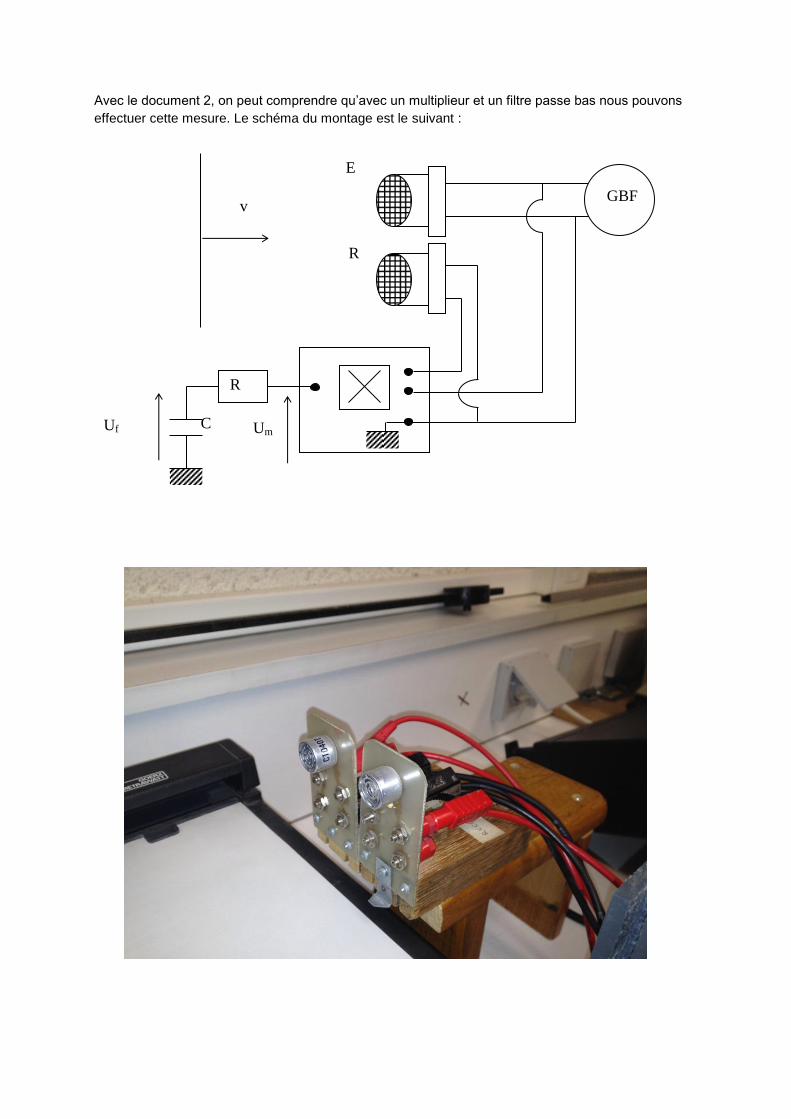
Avec le document 2, on peut comprendre qu’avec un multiplieur et un filtre passe bas nous pouvons
effectuer cette mesure. Le schéma du montage est le suivant :
E
v
R
R
C Uf
GBF
Um
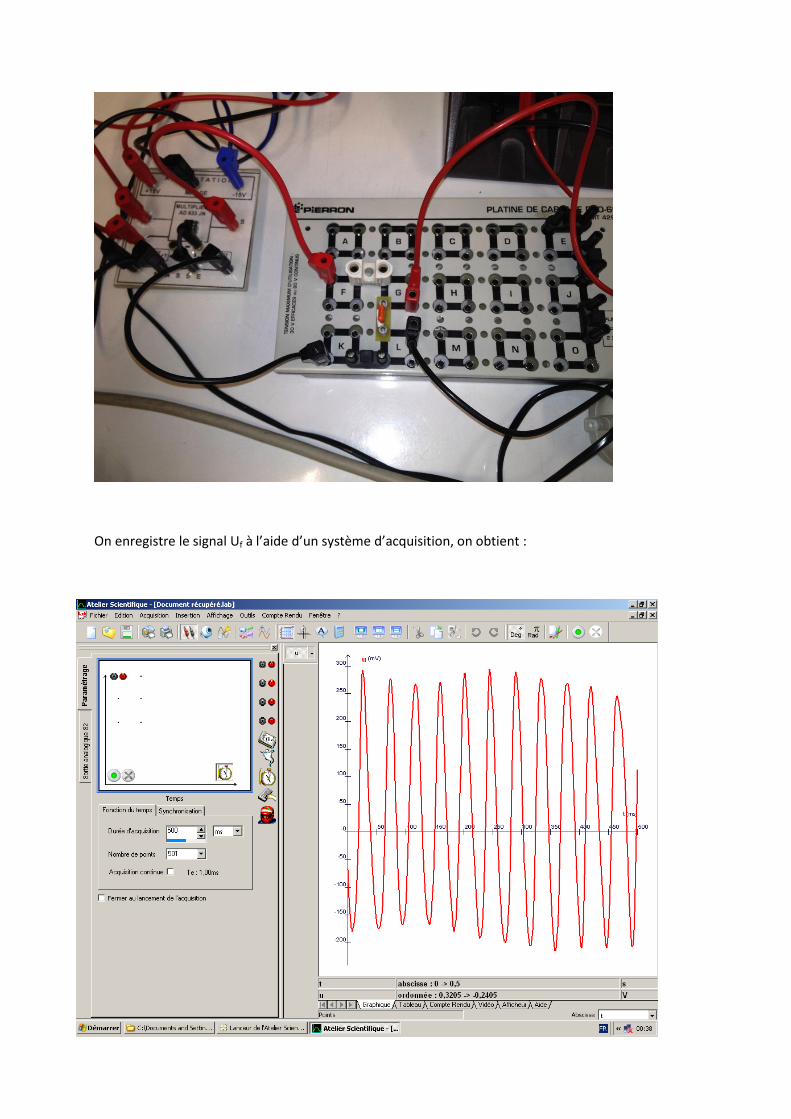
On enregistre le signal Uf à l’aide d’un système d’acquisition, on obtient :
On mesure Tf = 0.0437 s et on déduit NR-NE= 22.9 Hz
On peut calculer v :
(
)
(
) )
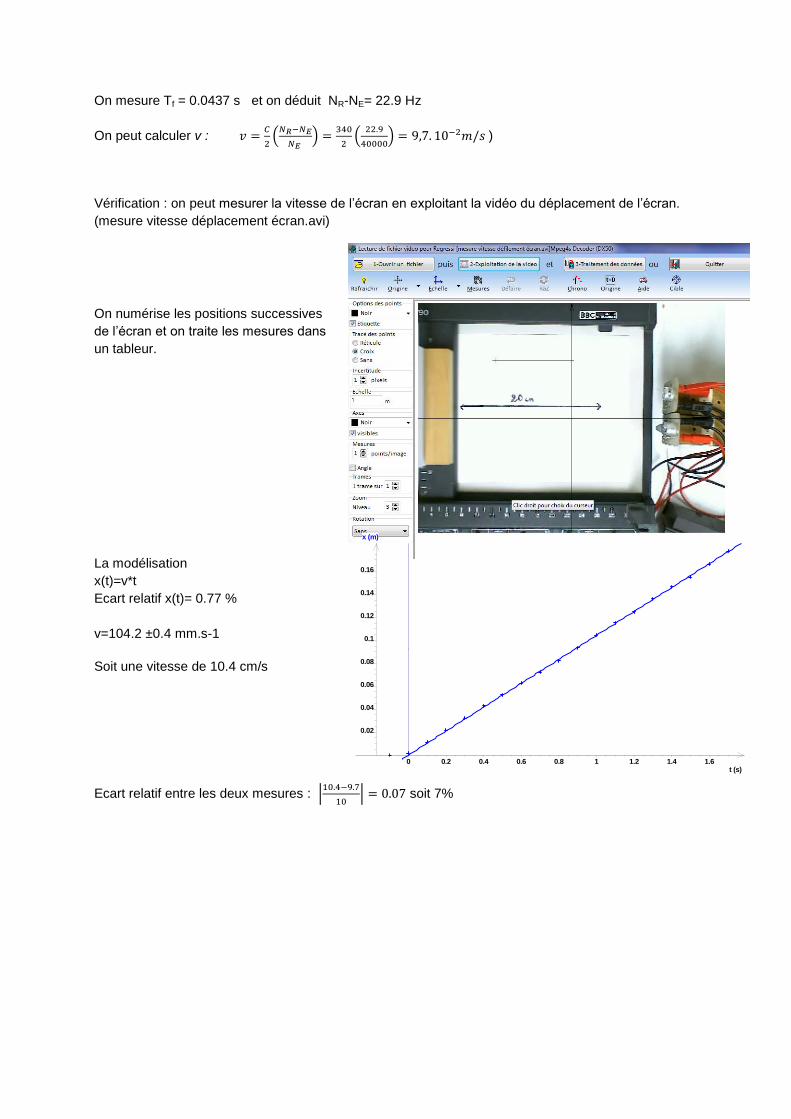
Vérification : on peut mesurer la vitesse de l’écran en exploitant la vidéo du déplacement de l’écran.
(mesure vitesse déplacement écran.avi)
On numérise les positions successives
de l’écran et on traite les mesures dans
un tableur.
La modélisation
x(t)=v*t
Ecart relatif x(t)= 0.77 %
v=104.2 ±0.4 mm.s-1
Soit une vitesse de 10.4 cm/s
Ecart relatif entre les deux mesures : |
| soit 7%
t (s)0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
x (m)
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Liste de matériel :
Pour les enregistrements des fichiers sons j’ai utilisé un smartphone.
Pour les vidéos j’ai utilisé un smartphone et une webcam.
Pour le montage US :
1 GBF et 1 alimentation continue 15 V.
1 émetteur et 1 récepteur d’ondes ultrasonores + 1 support.
1 interface d’acquisition + ordinateur
1 module multiplieur AD 633 + cavalier.
1 C = 100 nF, 1 R = 10 k et 1 plaquette d’essai.
écran mobile.
L’écran était fixé sur le chariot d’une table traçante.
On peut envisager d’autres dispositifs pour le déplacement de l’écran :
- on pourrait le fixer sur un mobile autoporteur et faire simultanément un enregistrement du
mouvement pour vérifier la vitesse.
- on peut envisager un déplacement manuel filmé par une webcam pour vérifier la vitesse.
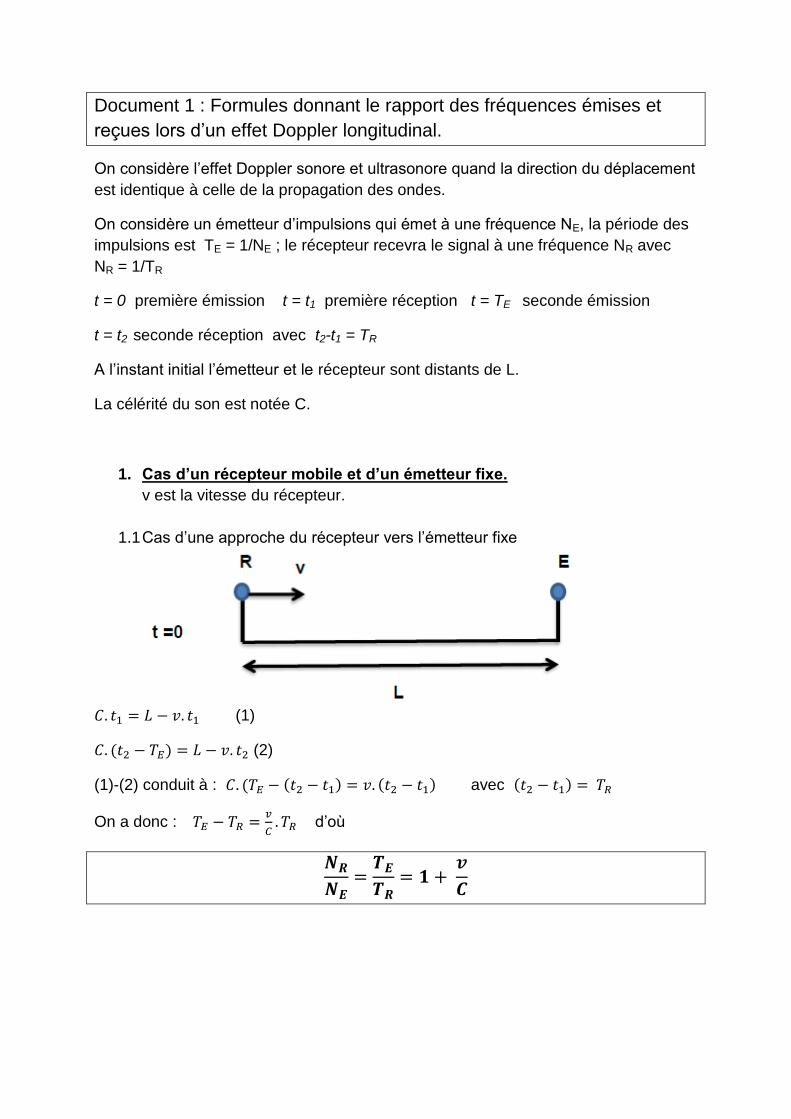
Document 1 : Formules donnant le rapport des fréquences émises et
reçues lors d’un effet Doppler longitudinal.
On considère l’effet Doppler sonore et ultrasonore quand la direction du déplacement
est identique à celle de la propagation des ondes.
On considère un émetteur d’impulsions qui émet à une fréquence NE, la période des
impulsions est TE = 1/NE ; le récepteur recevra le signal à une fréquence NR avec
NR = 1/TR
t = 0 première émission t = t1 première réception t = TE seconde émission
t = t2 seconde réception avec t2-t1 = TR
A l’instant initial l’émetteur et le récepteur sont distants de L.
La célérité du son est notée C.
1. Cas d’un récepteur mobile et d’un émetteur fixe.
v est la vitesse du récepteur.
1.1 Cas d’une approche du récepteur vers l’émetteur fixe
(1)
(2)
(1)-(2) conduit à : avec
On a donc :
d’où
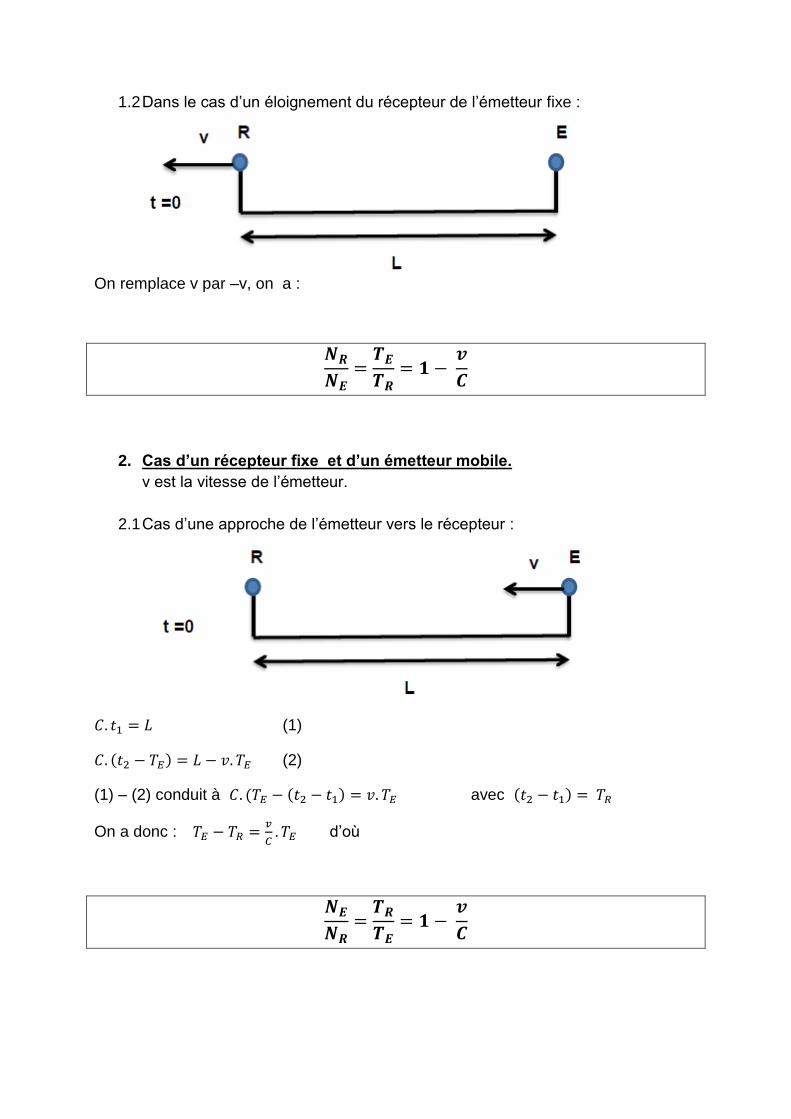
1.2 Dans le cas d’un éloignement du récepteur de l’émetteur fixe :
On remplace v par –v, on a :
2. Cas d’un récepteur fixe et d’un émetteur mobile.
v est la vitesse de l’émetteur.
2.1 Cas d’une approche de l’émetteur vers le récepteur :
(1)
(2)
(1) – (2) conduit à avec
On a donc :
d’où
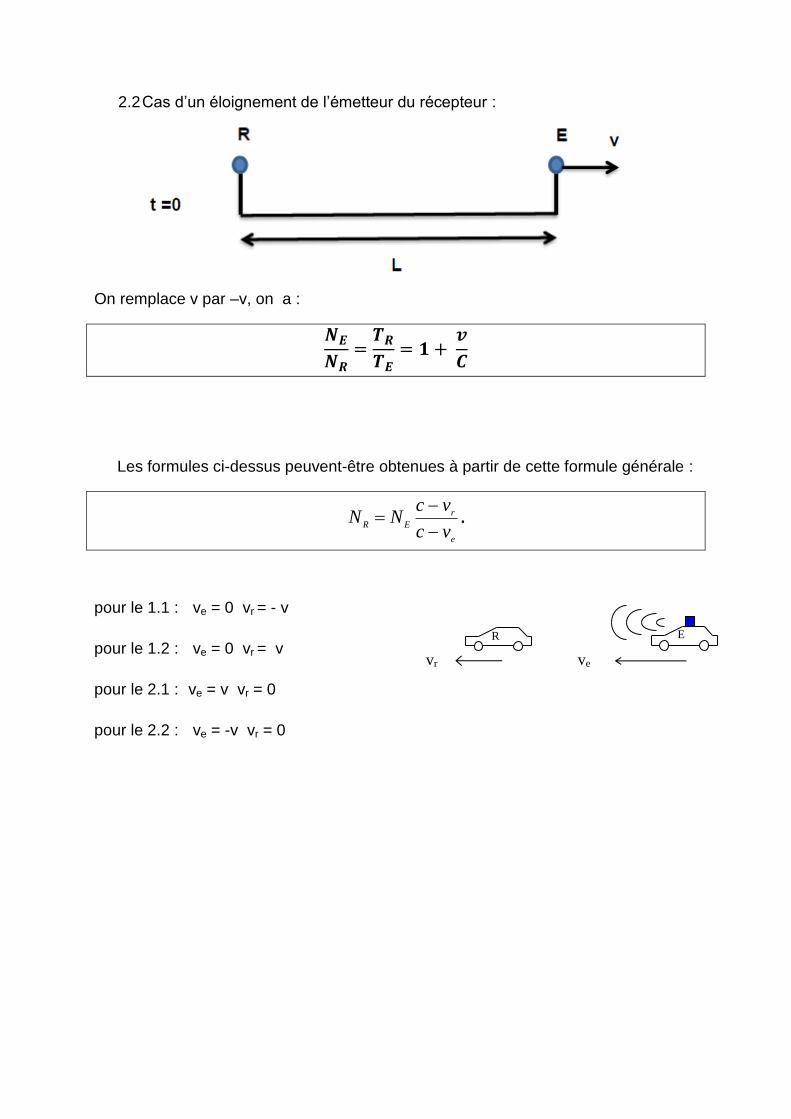
2.2 Cas d’un éloignement de l’émetteur du récepteur :
On remplace v par –v, on a :
Les formules ci-dessus peuvent-être obtenues à partir de cette formule générale :
e
r
ERvc
vcNN
.
pour le 1.1 : ve = 0 vr = - v
pour le 1.2 : ve = 0 vr = v
pour le 2.1 : ve = v vr = 0
pour le 2.2 : ve = -v vr = 0
ve vr
E R
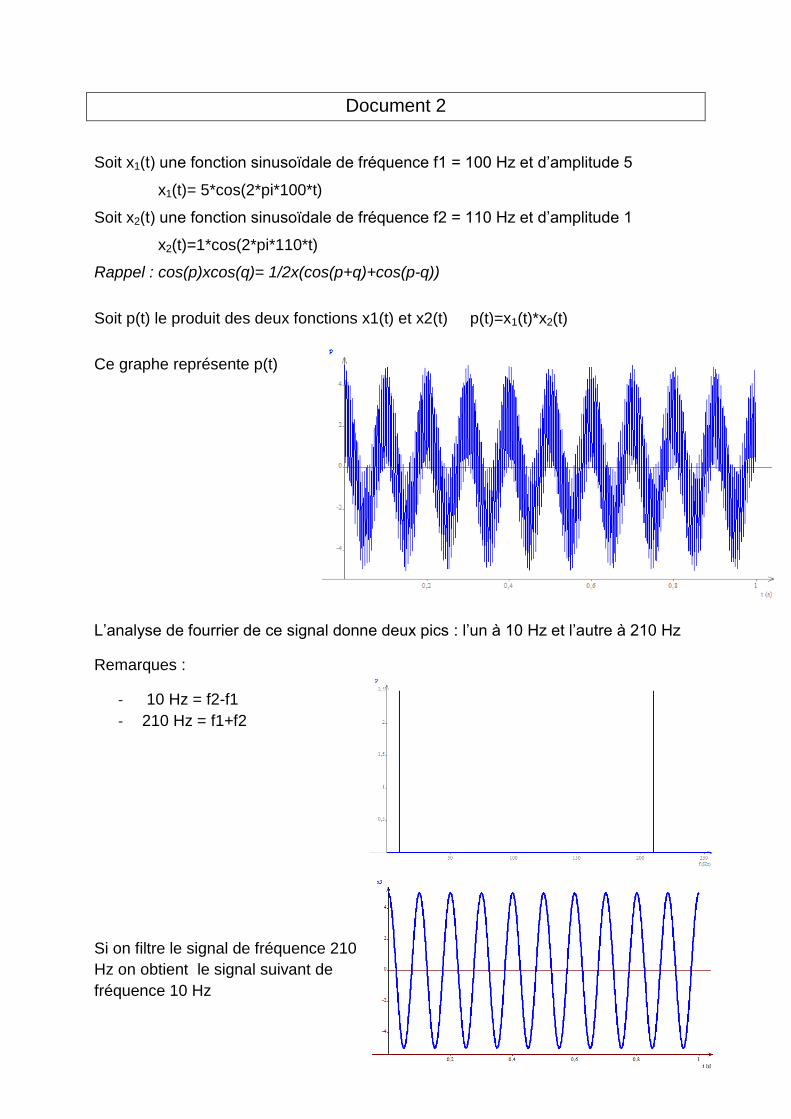
Document 2
Soit x1(t) une fonction sinusoïdale de fréquence f1 = 100 Hz et d’amplitude 5
x1(t)= 5*cos(2*pi*100*t)
Soit x2(t) une fonction sinusoïdale de fréquence f2 = 110 Hz et d’amplitude 1
x2(t)=1*cos(2*pi*110*t)
Rappel : cos(p)xcos(q)= 1/2x(cos(p+q)+cos(p-q))
Soit p(t) le produit des deux fonctions x1(t) et x2(t) p(t)=x1(t)*x2(t)
Ce graphe représente p(t)
L’analyse de fourrier de ce signal donne deux pics : l’un à 10 Hz et l’autre à 210 Hz
Remarques :
- 10 Hz = f2-f1
- 210 Hz = f1+f2
Si on filtre le signal de fréquence 210
Hz on obtient le signal suivant de
fréquence 10 Hz