Embed Size (px)
Citation preview

Optimisation du coûtdes lignes de transfert reconfigurables
– approche par programmation linéaire –
Antoneta Iuliana BRATCU
– stagiaire post-doc sous la direction d’Alexandre DOLGUI –
Présentation G2I / 26.05.2005 – 1 / 15

Sommaire
Positionnement du sujet
Description du problème – notations
Agrégation des contraintes. Formulation comme programme linéaire
Pré-traitement : réduction du modèle, bornes
Discussion sur un exemple
Conclusion et perspectives
Présentation G2I / 26.05.2005 – 2 / 15

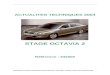
Positionnement du sujet
tête d’outil multifonctionnel : bloc – exécution parallèle des opérations
Lignes de transfert…
… reconfigurables :
utilisées dans l’usinage (production de masse)
grande productivité
investissements importants
l’optimisation initiale est justifiée
… mais la ligne manque de flexibilité
exécution sérielle des blocs dans chaque station
plusieurs stations en série
concevoir dès début la ligne de sorte à minimiser son coût pour toute une famille de produits
Présentation G2I / 26.05.2005 – 3 / 15

Description du problème – notations
Présentation G2I / 26.05.2005 – 4 / 15
La ligne doit usiner :
Ni – opérations
Gi – graphe de précédence
Tci – temps de cycle
p produits – pour chaque i=1,2…p
avec un ensemble de blocs (têtes d’outils) connu :
B – pour chaque r=1,2…| B |Cbr – coût
tbr – temps opératoire
en sachant en plus :
Cs0 – coût (fixe) d’une nouvelle station
m0 – nombre maximal de stations
n0 – nombre maximal de blocs par station
sous les contraintes…
… de précédence – Dori
… de temps
… d’exclusion – Dbs
… d’inclusion – osiD
Combien de stations, y
et quelle affectation des blocs aux stations, xrk =
sinon,0station la à assignéest bloc le si ,1 kr
faut-il avoir afin de minimiser le coût total de la ligne : Cs0·y +
B
1 1
0
r
m
krCb ·xrk ?

Agrégation des contraintes
agrégation des contraintes de précédence
– superposition des p graphes de précédence individuels, Gi graphe G’
– puisqu’il peut y avoir des précédences contraires dans les différents G i, G’ peut contenir des circuits,
– … et les nœuds de chaque tel circuit sont agglutinés pour former une seule macro-opération G orienté acyclique
agrégation des contraintes d’inclusion
agrégation des contraintes d’exclusion
– chaque élément de chaque qui contient seulement des parties d’une macro-opération est étendu avec les opérations manquantes
osiD
– les ensembles ayant des intersections non vides sont réunisosiD
– les blocs qui ne peuvent exécuter que des parties de macro-opérations sont éliminés,…
– … donc les éléments de Dbs qui les contiennent seront aussi éliminés
Présentation G2I / 26.05.2005 – 5 / 15
– … alors le sens stricte de la notion de précédence doit être relâché
p
ii
1 NN
p
i
osiDDos
1
Dbs

Formulation comme programme linéaire.
Présentation G2I / 26.05.2005 – 6 / 15
m* – une borne inférieure du nombre de stations
– pour chaque bloc r, l’intervalle K(r) = [head(r), tail(r)], head(r) est la station la plus tôt tail(r) est la station la plus tard où le bloc r peut être assigné
La famille Fs = {F1,…Fv} de paires de blocs ayant des opérations communes Fs est un sous-ensemble de blocs alternatifs
(seulement un bloc de chaque paire de Fs peut être utilisé dans une décision)
vqqF
,...2,1F0 = B\ – l’ensemble de blocs qui sûrement apparaissent dans une décision
DtDos
bloc Br wrt=|BrDt|
Wt = {BrB | wrt>0}
Ut = {BrB | itBr},
avec it une opération fixée
de l’ensemble DtDos
– pour chaque bloc rM(r) – les opérations prédécesseurs des opérations de Br,
qui n’appartiennent pas à Br
H(r) = {BtB | BtM(r)≠}
H={BrB | M(r)}
Paramètres additionnels
BtH(r)
Br H
htr=|BtM(r)|
R* – une borne supérieure de l’ensemble des blocs à affecter à la dernière station
bornes

Présentation G2I / 26.05.2005 – 7 / 15
Formulation comme programme linéaire
Minimiser Cs0·y +
R
1 1
0
r
m
krCb ·xrk sous les contraintes :
0)(
F ,1
rxrKk
rk
vqxqFr rKk
rk ,...2,1 ,1)(
NNR
r rKk
rkr xB)(
||
)( , ,)()( ),(
rKkrxrMxh rkrHt kstKs
tstr
H
ttt Us
tUs
sktWr
rkrt sKkDosDxDxw
)( , ,
tt Ds
ttDr
rk sKkDbsDDx
)( , ,1
00)}(|{
,...2,1 , mknxtKktr
rk R
*)}(|{
,,...2,1 , mkpiTcxt itKktrrkr
R
y kxrk, rR*, kK(r),
km*
exécution de chaque opération de l’ensemble agrégé, N,dans une seule station,
aussi bien par des blocs qui n’ont pas d’intersections (de F0), que par les autres blocs (de Fs)
exécution de toutes les opérations de N
respect des contraintes de précédence agrégées (décrites par le graphe de précédence « total », G)
respect des contraintes d’inclusion agrégées, Dos
respect des contraintes d’exclusion agrégées, Dbs
contrainte du nombre maximal de blocs par station
contrainte sur le nombre de stations
respect des temps de cycle de tous les produits

Présentation G2I / 26.05.2005 – 8 / 15
Pré-traitement : réduction du modèle
… portant sur l’ensemble de blocs, après l’agrégation des contraintes et l’élimination des blocs ne pouvant exécuter que des parties de macro-opérations
1. Identifier les « circuits » de blocs a).
i j Bx
u v Bw
q s Bz
k l By
i Br j
k l Bt
a) b)
« Briser » chaque tel circuit en éliminant le plus coûteux bloc de par son coût par opération.
2. En particulier, si 2 blocs forment une « boucle » b), alors ils seront traités comme des blocs alternatifs.
3. Éliminer tout bloc pour lequel il n’existe pas un sous-ensemble de blocs B’, tel que :
– les opérations de B’ donnent l’ensemble total, N,– |B’| m0n0,
– tous les blocs de B’ sont mutuellement disjoints.

Présentation G2I / 26.05.2005 – 9 / 15
Pré-traitement : calcul des bornes
algorithme A
décrit dans un travail antérieur
graphe de précédence agrégé, G
contraintes d’inclusion agrégées, Dos
matrice des distances
sinon,0excluents' qui blocs despar faites être seulement peuvent opérations les si ,2
d(i,j) =
q–(i), i=1,2,…|N|
algorithme A
graphe inversé, Ginv
Dos
matrice dq+(i), i=1,2,…|N|
c) k+/–(i) = [q+/–(i)/n0], i=1,2,…|N|
Calcul de m*
Calcul de K(r), pour chaque bloc r.
Calcul de R*.
a)
b)
head(r) = max{k–(i) | i Br}
tail(r) = min{k+(i) | i Br}
d)
b) Notons par head_min le minimum des heads des blocs ayant le tail égal à tail_max.
a) tail_max max{tail(r)| Br B}.
c) R* est formé des blocs qui ont le tail strictement supérieur à head_min.
: m* = max{k–(i)| i N}

Un exemple de petite taille – données d’entrée
Présentation G2I / 26.05.2005 – 10 / 15
N1={1,2,3,4,5,6,7,8,9,10}, |N1|=10
N2={1,2,3,4,5,6,7,8,9,10,11,12}, |N2|=12
N3={1,2,5,7,8,9,10,11,12,13}, |N3|=10
13,12,11,10,9,8,7,6,5,4,3,2,11
p
iiNN |N|=13
p = 3 produits
1
6
3
2
7
8
4
9 10
5
G1
1
6
3
4
2
8
9
5 10
11
G2
7
12 1
13
5
12
8
2
9
10
11
G3
7
contraintes de précédence
osos DD
osD
1211
10,9 ,8,71
osos DD
osD
2221
12,10,9 ,8,72
osos DD
osD
3231
10,9 ,8,73 13,3ossD
contraintes d’inclusion

Présentation G2I / 26.05.2005 – 11 / 15
Un exemple de petite taille – données d’entréeBloc
rOpérations Temps opératoire,
tbr [u.t.]Coût,
Cbr [u.m.]B1 {1,3,6,13} 9 250
B2 {1,3,13} 8 170
B3 {1,2,7,8} 6 281
B4 {2,5,9} 10 150
B5 {2,5,7,8,11} 9 275
B6 {2,6,9,10} 11 230
B7 {4,6,8,10} 13 211
B8 {4,7,8} 9 160
B9 {4,7,8,9} 10 215
B10 {5,12,13} 6 158
B11 {10,11,12,13} 12 230
B12 {2,5,10,11,12} 11 260
les blocs
contraintes d’exclusion
bsbsbs DDD
bs BBBBBBBD
321
11591761 , ,, ,,, les temps de cycle : Tc1=23 u.t. Tc2=25 u.t. Tc3=21 u.t.

Un exemple de petite taille – pré-traitement
Présentation G2I / 26.05.2005 – 12 / 15
1
6
9
4 3
8
7
a = {2,5}
b = {10,11,12}
G
13
2 macro-opérations
le graphe de précédence agrégé
Blocr
Opérations tbr [u.t.] Cbr
[u.m.]B1 {1,3,6,13} 9 250
B2 {1,3,13} 8 170
B3 {1,2,7,8} 6 281
B4 {2,5,9} 10 150
B5 {2,5,7,8,11} 9 275
B6 {2,6,9,10} 11 230
B7 {4,6,8,10} 13 211
B8 {4,7,8} 9 160
B9 {4,7,8,9} 10 215
B10 {5,12,13} 6 158
B11 {10,11,12,13} 12 230
B12 {2,5,10,11,12} 11 260
a
b
a b
6 B1
1 3 13 B2
9 B9
4 7 8 B8
a 9 B4
a b B12
13 b B11
… l’ensemble de blocs
… « circuits » de blocs
ptosptosptos DDD
ptos bD
321
,9 ,8,7 ,13,3
… les contraintes d’inclusion
… les contraintes d’exclusion
ptbsD
ptbs BBD
1
91,

Présentation G2I / 26.05.2005 – 13 / 15
Un exemple de petite taille – bornes…Bloc head tail m* R*
B1 1 4
2 {1,2,3,4,5,6}B2 1 5B4 2 5B8 2 5B9 2 5B12 2 5
… optimisation Fs={{B1,B2}, {B4,B12}, {B4,B9}, {B8,B9}} F0=
R={1, 2, 4, 8, 9, 12} |Dospt|=nic=3 H={B4, B8, B9, B12}
t
wrt, r R, t=1,2,…nic=3 M(r) H(r) htr, r R, t RW1={B1,B2} W2={B8,B9} W3={B4,B12} B1 B2 B4 B8 B9 B12
B1 2 0 0 0 0 0 0 0 0
B2 2 0 0 0 0 0 0 0 0
B4 0 0 1 {4,7,8} {B8,B9} 0 0 0 3 3 0
B8 0 2 0 {3,6,13} {B1,B2} 3 2 0 0 0 0
B9 0 2 0 {3,6,13} {B1,B2} 3 2 0 0 0 0
B12 0 0 1 {4} {B8,B9} 0 0 0 1 1 0
rt
2 2
Station 1ts =9, Cs =600
B1 {1, 13, 3, 6 }
tb1=9 Cb1=250
B9 {4, 7, 8, 9 }
tb9=10 Cb9=215
B12 {b, a}
tb12=11 Cb12=260
2 2
Station 2ts =21, Cs =825
solution
optimale

Présentation G2I / 26.05.2005 – 14 / 15
Conclusions… lignes de transfert : investissement initial important
– optimisation dans la phase initiale de conception justifiée…
– … encore plus dans le cas d’une famille de produits, assurant la reconfigurabilité à moindres frais
conception des lignes de transfert reconfigurables : agrégation des contraintes
… à faire amélioration des bornes
tests numériques plus amples
couplage avec des heuristiques
… perspectives reformuler le problème en tenant compte des coûts de fonctionnement

Merci de votre attention !
Présentation G2I / 26.05.2005 – 15 / 15