Embed Size (px)
Citation preview

Sciences de l’Ingénieur Transmission & transformation Mouvements Fiche Synthèse
Page 1 sur 4
1. LES ENGRENAGES
Un engrenage est un ensemble de roues qui engrènent ensemble. C’est une transmission par obstacles. Condition d’engrènement : les roues dentées 1 et 2 doivent avoir le même module m (nombre sans dimension qui définit la taille des roues). Les diamètres primitifs des roues sont tels que :
�� � �. �� et �� � �. �� où Z1 et Z2 correspondent au nombre de dent des roues 1 et 2.
Rapport de vitesses de l’engrenage :
� �
��
��
��
� ��
���
��
���
�. �
�
tr/min rad/s dents mm N.m Rapport
� 1, réducteur � 1, multiplicateur
Vitesse de rotation Il s’agit souvent du rapport ������
��������������
� ����
Vitesse angulaire Il s’agit souvent du rapport �������
�������
���������
�� ����
Nombre de dents toujours vrai car transmission intégrale
Diamètre primitif Vrai pour les roues à axes parallèles (surtout pas pour les systèmes roues vis sans fin)
Couple
��. � ����
�������
Si rendement η=1 alors
� � ����
�������
Cascade d’engrenages
Les pignons intermédiaires 2, 3 et 4, appelés « pignons fous », n’ont pour fonction que d’inversé le sens de rotation ou d’éloigner les roues motrice et réceptrice l’une de l’autre.
Rapport de vitesses de la cascade :
� !
��
��
�!
Train d’engrenages Rapport de vitesses du train d’engrenages :
� "#1$% .&'()*+(,-���./.��0
&'()*+(,-���.é�0
α : nombre de contacts extérieurs. Lorsque l’on trouve un rapport négatif cela signifie que l’arbre de sortie tourne en sens inverse par rapport à l’arbre d’entrée.
Autre calcul possible pour le rapport de vitesses du train d’engrenage r :
��1
�2� / 3 4 � "#1$.
52
5673 "#1$.
568
51
/ rapport de l’engrenage entre les roues 2a et 3, 4 rapport de l’engrenage entre les roues 1 et 2b,
Les deux (-1) sont liés aux deux contacts extérieurs.
Sciences de l’Ingénieur Transmission & transformation Mouvements Fiche Synthèse
Page 2 sur 4
2. SYSTEME PIGNON CREMAILLERE
Modèle 3D Schéma cinématique Lois entrée/sortie
• Déplacements : 9"+$ � : 3 ;"+$
x(t) position crémaillère en m α(t) angle du pignon en rad
• Vitesses : <"+$ � : 3 �"+$
V(t) vitesse crémaillère en m.s-1 ω(t) vitesse du pignon en rad.s-1 R rayon primitif du pignon en m
Condition d’engrènement : le pignon et la crémaillère doivent avoir le même module m. Diamètre primitif du pignon D = m.Z, où Z est le nombre de dents du pignon
3. SYSTEME ROUE VIS SANS FIN
Modèle 3D Schéma cinématique Lois entrée/sortie
Rapport de vitesses :
� � ��
=>0�
�=>0
�� ��
Zvis nombre de filet de la vis
Zroue nombre de dents de la roue
• Le rapport de transmission obtenu peut être très important avec un faible encombrement.
• Le rendement est faible (0.4). • Le mécanisme est en général irréversible ce qui signifie que la roue ne peut
pas entraîner la vis.
Exemple de vis à 3 filets
4. SYSTEME VIS ECROU
Le système vis-écrou permet de transformer un mouvement de rotation en un mouvement de translation. (Exemples : pousse-seringue, pilote automatique, destructeur d’aiguilles, …) Lois entrée sortie
• Déplacement : D = pas x Nb tour (mm) (mm/tr) (tr)
• Vitesse : V = pas x N / 60 (mm/s) (mm/tr) (tr/min)

Sciences de l’Ingénieur Transmission & transformation Mouvements Fiche Synthèse
Page 3 sur 4
5. SYSTEME POULIES COURROIE(S)
Il existe de nombreux modèles de courroies : lisses, à section circulaire, trapézoïdale, rectangulaire, crantées,…
Les courroies à section circulaire, trapézoïdale, rectangulaire assurent une transmission de mouvement avec glissement. Cela peut être utilisé comme une sécurité sur le système : limiteur de couple.
Les poulies crantées et la courroie associée assurent une transformation de mouvement sans glissement. Comme les engrenages, cette transformation de mouvement est par obstacle, donc avec conservation des positions relatives des poulies à tout instant.
Lois entrée sortie : rapport de vitesses r
� �6
�1�
?1
?6N en tr/min et D en mm
<@�A����� �?1
� . �� �
?6
� . ��ω en rad/s
6. SYSTEME PIGNONS CHAINE
C’est une transmission par obstacle, à l’aide d’un lien articulé appelé « chaîne », un mouvement de rotation entre deux arbres parallèles.
Lois entrée sortie : rapport de vitesses r
� �6
�1�
51
56N en tr/min et Z nb dents
<@BC��� �?1
� . �� �
?6
� . ��ω en rad/s et D en mm
7. LES CAMES
Une came est une pièce mécanique non circulaire qui a un mouvement de rotation et met en mouvement une tige. Ce système transforme un mouvement de rotation en un mouvement de translation alternatif. L'amplitude du mouvement est liée aux dimensions de la came.
Sciences de l’Ingénieur Transmission & transformation Mouvements Fiche Synthèse
Page 4 sur 4
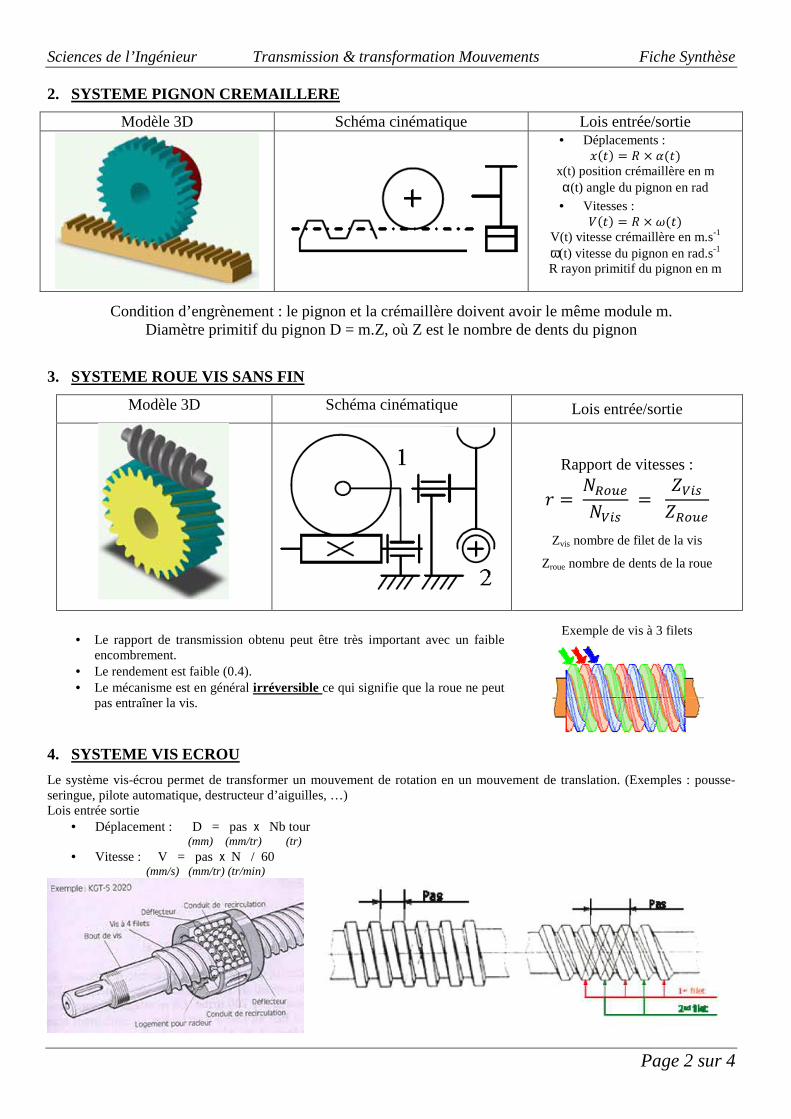
8. LE SYSTEME BIELLE MANIVELLE
Nomenclature des pièces Rep 1 Piston Rep 2 Axe côté piston Rep 3 Corps Rep 4 Support Rep 5 Bielle Rep 6 Axe côté manivelle Rep 7 Manivelle
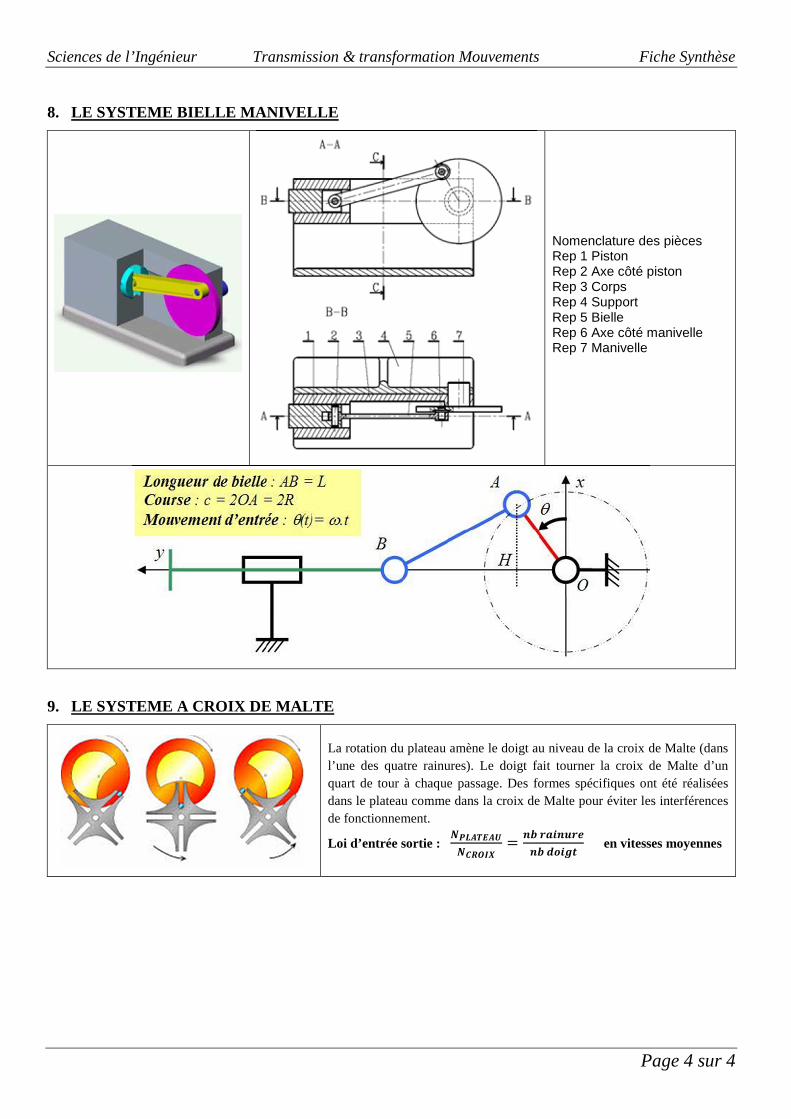
9. LE SYSTEME A CROIX DE MALTE
La rotation du plateau amène le doigt au niveau de la croix de Malte (dans l’une des quatre rainures). Le doigt fait tourner la croix de Malte d’un quart de tour à chaque passage. Des formes spécifiques ont été réalisées dans le plateau comme dans la croix de Malte pour éviter les interférences de fonctionnement.
Loi d’entrée sortie : DEFGHIGJ
DKLMNO�
PQRSTPURV
PQWXTYZ en vitesses moyennes





























