Embed Size (px)
Citation preview
Planning and Conception of Next-Generation Optical
Access Networks
António Miguel Barata da Eira
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Júri
Presidente: Prof. Dr. José Manuel Bioucas Dias
Orientador: Prof. Dr. João José de Oliveira Pires
Co-Orientador: Eng. João Manuel Ferreira Pedro
Vogal: Prof. Dr. Amaro Fernandes de Sousa
Outubro 2010
ii

iii
Acknowledgements
Upon completion of this Thesis, I would first like to thank Prof. João Pires for his valuable guidance
throughout the whole process, particularly for allowing me the liberty to pursue my own objectives in this
work within the framework he defined.
To João Pedro, of Nokia-Siemens Networks, for his availability and invaluable help in getting me
started on linear programming basics, and also to João Santos, also of Nokia-Siemens Networks, for
taking the time to meet with me and review the formulation.
To Engs. João Horta and Eduardo Almeida, of Sonaecom, for their willingness to receive us and take
us through the process of PON planning from an operator’s viewpoint, as well as providing extremely
valuable information on PON costs.
To my good friends at IST, Pedro Frade, Tiago Rodrigues, Rui Marmé and all the others too many to
mention. It certainly would not have been the same without them.
To my grandparents, mother, brother and specially my father for not having ever given less than
everything he possibly could for me.
To Inês, for more than I can put into words.

iv
Abstract
The generalized deployment of Passive Optical Networks (PONs) as the new-generation solution for
fixed Access Networks has brought with it the need for increasingly more efficient and automated
planning methods in such networks. This work presents an approach based on Integer Linear
Programming (ILP) models to determine the optimal number of splitters and the allocation of Optical
Network Terminations (ONTs) to them.
This Thesis extends previous work in the area by considering Operational Expenditures (OPEX) in
the planning process and being formulated towards realistic PON configurations. Another model was
created for planning multi-stage PONs with various levels of cascading splitters. In both cases, heuristic
methods were developed to quickly obtain results in the larger scenarios that the ILP models cannot
handle.
Based on the ILP models, two studies are presented: one on the physical aspects of the migration
from Gigabit-PON (GPON) to XG-PON, and another concerning a cost comparison of PON and Point-to-
Point (P2P) solutions.
Results of the single-stage model show that it is possible to optimally allocate scenarios with up to
8 000 ONTs in 1 minute. Beyond that number, the heuristics provide good approximations in short times.
The multi-stage model is still too complex for networks spanning more than 50 ONTs. The heuristic
method developed for the multi-stage problem shows reasonable results for scenarios where the ILP
benchmarking was available.
The studies presented also conclude that current XG-PON specifications only allow a seamless
migration from GPON in short-range PONs, and that PONs are cheaper to deploy than P2P but more
expensive factoring in available bandwidth.
Keywords: PON Planning, Integer Linear Programming, multi-stage PON, XG-PON, P2P.

v
Resumo
A adopção generalizada de Redes Ópticas Passivas (PONs) como a solução para a nova geração
de Redes de Acesso fixas trouxe consigo a necessidade de métodos de planeamento mais eficientes e
automatizados. Este trabalho apresenta uma abordagem baseada em modelos de Programação Linear
Inteira (ILP) para determinar o número óptimo de splitters e a alocação de terminais ópticos a estes.
Esta Tese aprofunda o trabalho prévio na área ao considerar despesas operacionais no processo de
planeamento e ao ser formulada tendo em atenção configurações reais de PONs. Outro modelo foi
criado para o planeamento de PONs multi-andar, com vários níveis de splitters em cascata. Em ambos
os casos, métodos heurísticos foram desenvolvidos para obter resultados rápidos nos cenários mais
exigentes que os modelos ILP não resolveram em tempo útil.
Baseado nos modelos ILP, dois estudos são apresentados: um sobre os aspectos físicos da
migração da GPON para XG-PON, e outro sobre uma comparação em termos de custo entre soluções
PON e ponto-a-ponto.
Os resultados do modelo de andar único mostram que é possível alocar de forma óptima cenários
com até 8 000 terminais num minuto. Para lá desse número, as heurísticas proporcionam boas
aproximações em pouco tempo. O modelo multi-nível é ainda demasiado complexo para redes com mais
de 50 terminais. A heurística desenvolvida para multi-nível mostra resultados razoáveis para os cenários
onde a comparação com o ILP foi possível.
Os estudos apresentados também concluem que as especificações actuais da XG-PON apenas
permitem uma migração suave para PONs de curto alcance, e que PONs custam menos a instalar que
soluções ponto-a-ponto, mas são mais caras quando se entra em conta com a largura de banda
oferecida.
Palavras Chave: Planeamento de PONs, Programação Linear Inteira, PONs multi-nível, XG-PON,
P2P.
vi
Table of Contents
1. Introduction .............................................................................................................................. 1
1.1 Evolution of Access Networks ............................................................................................... 2
1.2 State of the Art ...................................................................................................................... 8
1.3 Motivation, Objectives and Structure ................................................................................... 10
1.4 Original Contributions ......................................................................................................... 11
2. PON Planning ......................................................................................................................... 12
2.1 Network Planning ................................................................................................................ 13
2.2 ILP Model 1 – Original Formulation ..................................................................................... 15
2.2.1 Costs and Scenarios ................................................................................................... 16
2.2.2 Performance and Scalability ........................................................................................ 18
2.3 ILP Model 2 – Updated Formulation .................................................................................... 20
2.3.1 Splitter Co-Location ..................................................................................................... 24
2.3.2 ONT Co-Location ........................................................................................................ 25
2.3.3 Additional Variables .................................................................................................... 26
2.4 Heuristic Methods ............................................................................................................... 28
2.4.1 ADD Heuristic ............................................................................................................. 29
2.4.2 LP Relaxation ............................................................................................................. 31
2.5 Results and Discussion ....................................................................................................... 32
2.5.1 ILP Model 1 – Comparative Performance ................................................................... 32
2.5.2 ILP Model 2 – Comparative Performance .................................................................... 35
2.5.3 Cost Distribution .......................................................................................................... 38
2.5.4 Costs by configuration ................................................................................................. 40
2.6 Summary ............................................................................................................................ 41
3. Multi-Stage PON Planning ...................................................................................................... 42
3.1 Hierarchical Network Algorithms Review ............................................................................. 43
3.2 Multi-Stage PON ILP Model ................................................................................................ 45
3.3 Heuristics............................................................................................................................ 50
3.3.1 LP and MILP Relaxation .............................................................................................. 50
3.3.2 Two-Stage Multi-Level Heuristic .................................................................................. 50
3.3.3 Heuristic Bound ........................................................................................................... 55
3.4 Results ............................................................................................................................... 56
3.5 Summary ............................................................................................................................ 57
4. Physical, Technological and Topology Aspects ....................................................................... 59
4.1 Physical Level Constraints .................................................................................................. 60
4.1.1 Power Budget and Dispersion ..................................................................................... 60
vii
4.1.2 Maximum Differential Distance .................................................................................... 63
4.2 Evolution to XG-PON .......................................................................................................... 64
4.2.1 Evolution Analysis ....................................................................................................... 65
4.3 P2P vs. PON ...................................................................................................................... 68
4.3.1 Architectural Differences ............................................................................................. 69
4.3.2 ILP P2P Model ............................................................................................................ 69
4.3.3 Results........................................................................................................................ 71
4.4 Summary ............................................................................................................................ 73
5. Conclusions and Future Work ................................................................................................. 74
5.1 General Conclusions........................................................................................................... 75
5.2 Future Work ........................................................................................................................ 75
References ...................................................................................................................................... 77
A. Efficiency of Fixed Access Networks ....................................................................................... 81
A.1 Overview ............................................................................................................................ 81
A.1.1 GPON ......................................................................................................................... 82
A.1.2 EPON ......................................................................................................................... 84
A.1.3 DOCSIS ...................................................................................................................... 86
A.2 Comparative Results ........................................................................................................... 88
B. Software Implementation ........................................................................................................ 91
B.1 Describing the Model .......................................................................................................... 91
B.2 Setting the Scenarios .......................................................................................................... 92
C. Physical Parameters ............................................................................................................... 95
C.1 Power Budget ..................................................................................................................... 95
C.2 Dispersion Effects ............................................................................................................... 97
viii
List of Figures
Figure 1.1 - Various types of FTTx (Source: Wikipedia). ..................................................................... 3
Figure 1.2 - Downstream bitrate for xDSL technologies as a function of distance. (Source: Wikipedia)
................................................................................................................................................................ 3
Figure 1.3 - HFC network (Source: Wikipedia). .................................................................................. 4
Figure 1.4 - a) Historical and projected bandwidth demand. b) Evolution of penetration of Broadband
home devices. (Source: Verizon). ............................................................................................................ 4
Figure 1.5 - a) P2P Topology. b) P2MP Topology. (Source: Alcatel-Lucent) ....................................... 5
Figure 1.6 - Downstream average throughput for EPON, GPON and DOCSIS 3.0 ............................. 7
Figure 1.7 - Upstream average throughput for EPON, GPON and DOCSIS 3.0. ................................. 7
Figure 2.1 – Double-Star Topology .................................................................................................. 13
Figure 2.2 - Savings in conduit sharing. ........................................................................................... 16
Figure 2.3 - Connections in Manhattan Distance. ............................................................................. 17
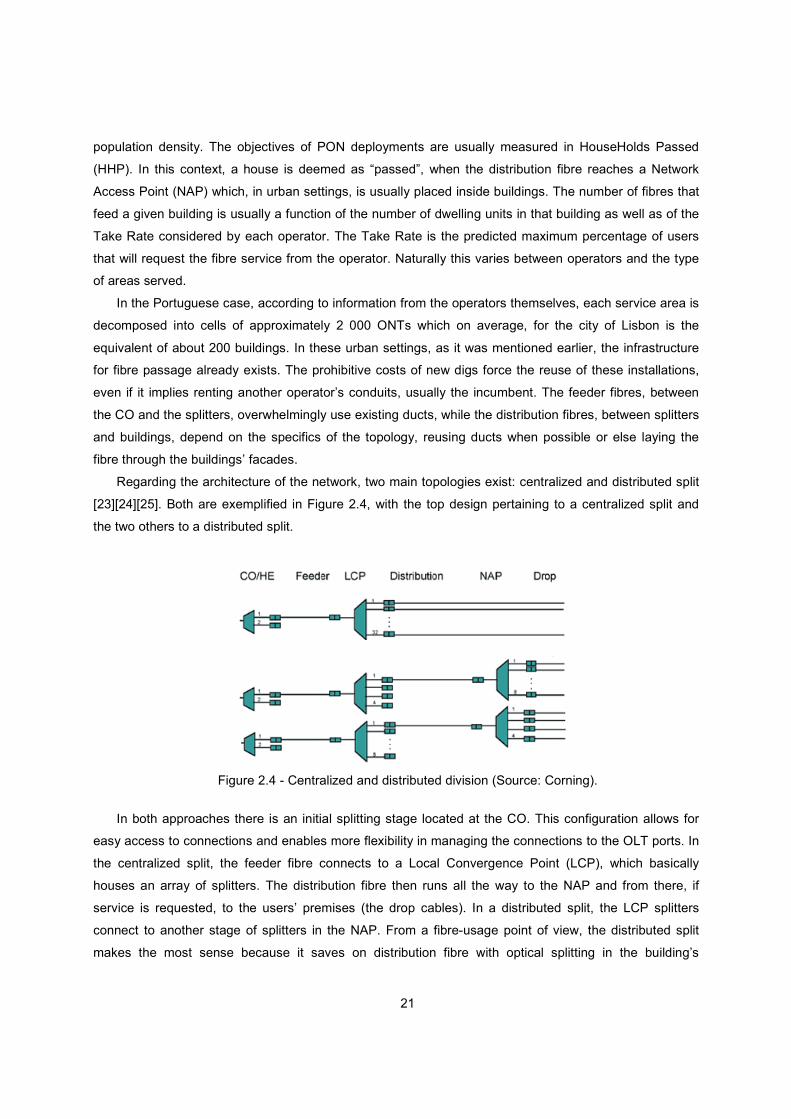
Figure 2.4 - Centralized and distributed division (Source: Corning). .................................................. 21
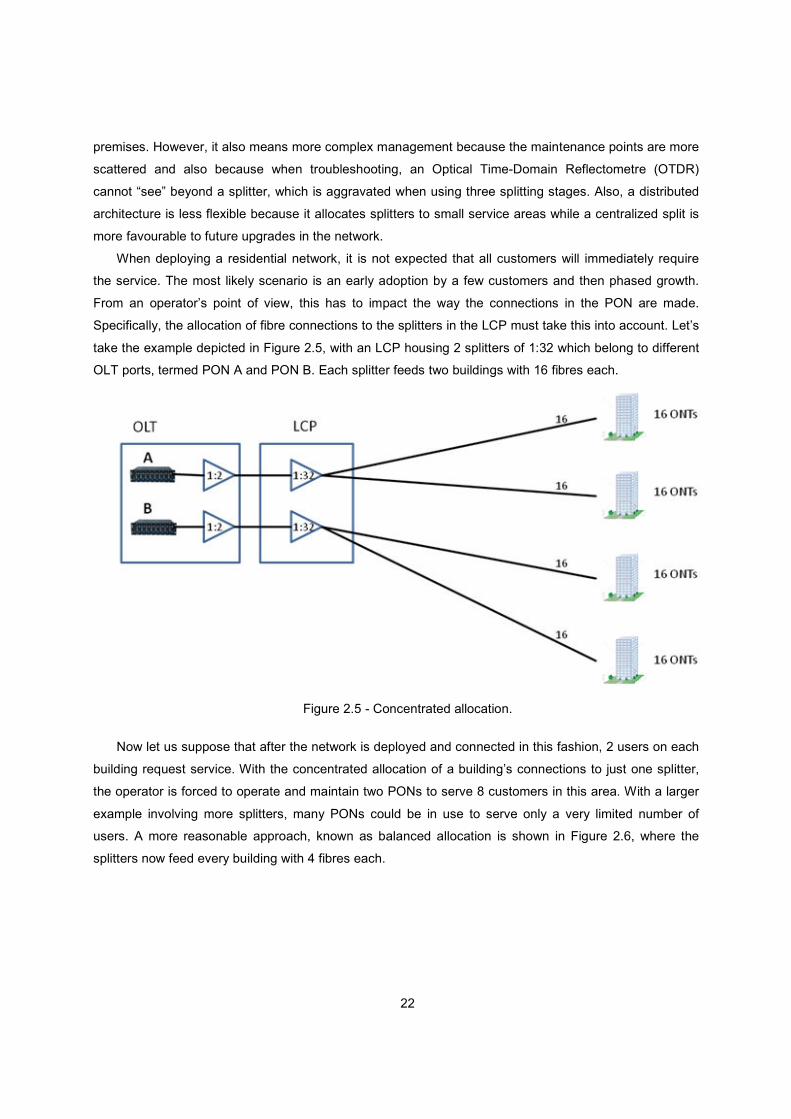
Figure 2.5 - Concentrated allocation. ............................................................................................... 22
Figure 2.6 - Balanced allocation. ...................................................................................................... 23
Figure 2.7 - Fusion splice (left) and Optical Connectors (right). (Source: Mike Geiger). ..................... 23
Figure 2.8 - Implicit splitting stage at the CO. ................................................................................... 26
Figure 2.9 - ADD heuristic flowchart. ................................................................................................ 29
Figure 2.10 - Drawback of ADD. ...................................................................................................... 30
Figure 2.11 - Flowchart of LP Relaxation. ........................................................................................ 32
Figure 2.12 - Network costs per method for original formulation. ...................................................... 34
Figure 2.13 - Network costs per method for updated formulation. ..................................................... 36
Figure 2.14 - Network costs by number of ONTs. ............................................................................. 38
Figure 2.15 - Average cost breakdown for urban scenarios. ............................................................. 39
Figure 2.16 - Average cost breakdown for rural scenarios. ............................................................... 39
Figure 2.17 - Network costs by configuration. ................................................................................... 41
Figure 3.1 - Single and Multi-Level concentrator networks. Source: [34]. .......................................... 43
Figure 3.2 - Multi-staged PON.......................................................................................................... 44
Figure 3.3 - Examples of splitter capacity variables. ......................................................................... 46
Figure 3.4 - Multi-Level PON obtained from ILP. .............................................................................. 49
Figure 3.5 - Flowchart of two-stage PON heuristic. ........................................................................... 51
Figure 3.6 - Example of two-stage heuristic first layout. .................................................................... 53
Figure 3.7 - Reallocation of ONTs and branch discarding. ................................................................ 54
Figure 3.8 - Comparative costs for Single Stage ILP and Two-Stage heuristic. ................................. 57
Figure 4.1 - Power budget in PON link. Source: [38]......................................................................... 60
Figure 4.2 - Standard link model. ..................................................................................................... 61
ix
Figure 4.3 - Operating wavelengths for GPON/XG-PON co-existence. Source: [25]. ........................ 64
Figure 4.4 - WDM filtering at the OLT. .............................................................................................. 64
Figure 4.5 - Downstream optical path penalties for GPON. ............................................................... 66
Figure 4.6 - Upstream optical path penalties for GPON. ................................................................... 67
Figure 4.7 - Downstream optical path penalties for XG-PON. ........................................................... 67
Figure 4.8 - Upstream optical path penalties for XG-PON. ................................................................ 68
Figure 4.9 - Junction derivation in fibre cable. .................................................................................. 69
Figure 4.10 - Total network costs for PON and P2P. ........................................................................ 72
Figure 4.11 - Network cost per Mbps offered for PON and P2P. ....................................................... 72
Figure A.1 - GPON downstream frame. ............................................................................................ 82
Figure A.2 - Upstream user burst. .................................................................................................... 83
Figure A.3 - Downstream Average throughput. ................................................................................. 89
Figure A.4 - Upstream Average throughput. ..................................................................................... 89
Figure B.1 - Network element placement: Rural (left) and Urban (right). ........................................... 92
Figure B.2 - Network representation for rural scenario. ..................................................................... 93
Figure B.3 - Network representation for urban scenario. ................................................................... 94
x
List of Tables
Table 2.1 - Costs for preliminary analysis. ........................................................................................ 18
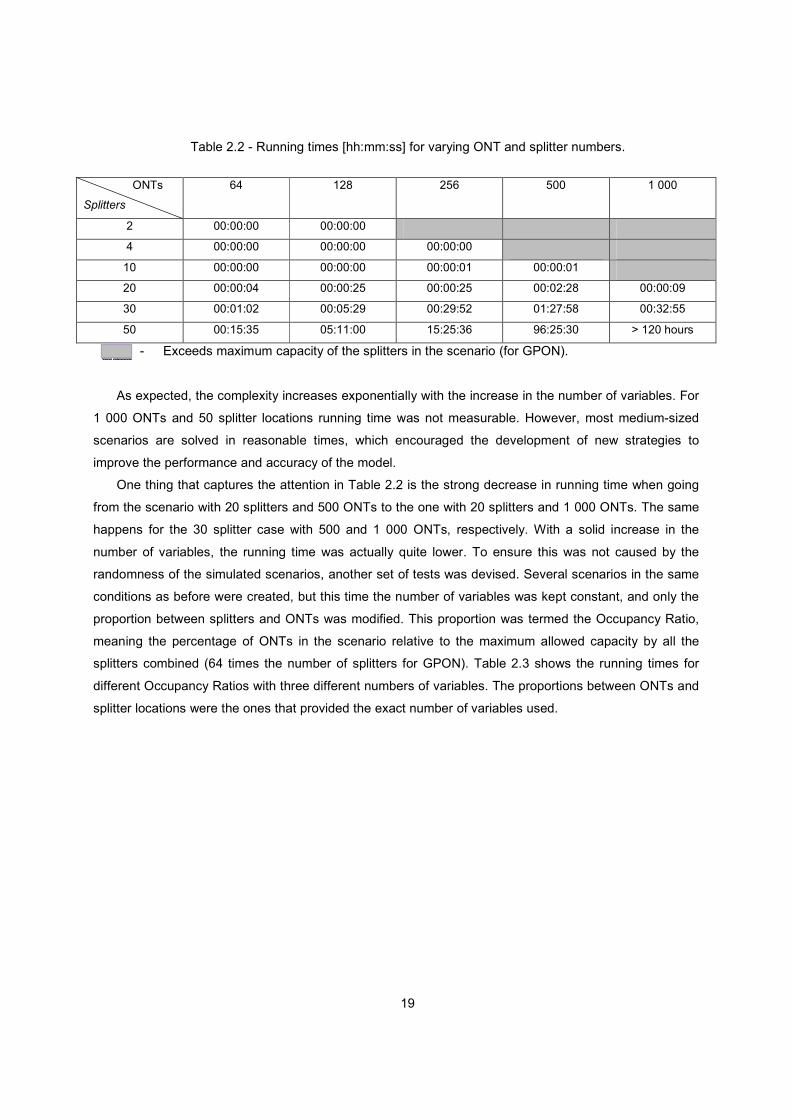
Table 2.2 - Running times [hh:mm:ss] for varying ONT and splitter numbers. ................................... 19
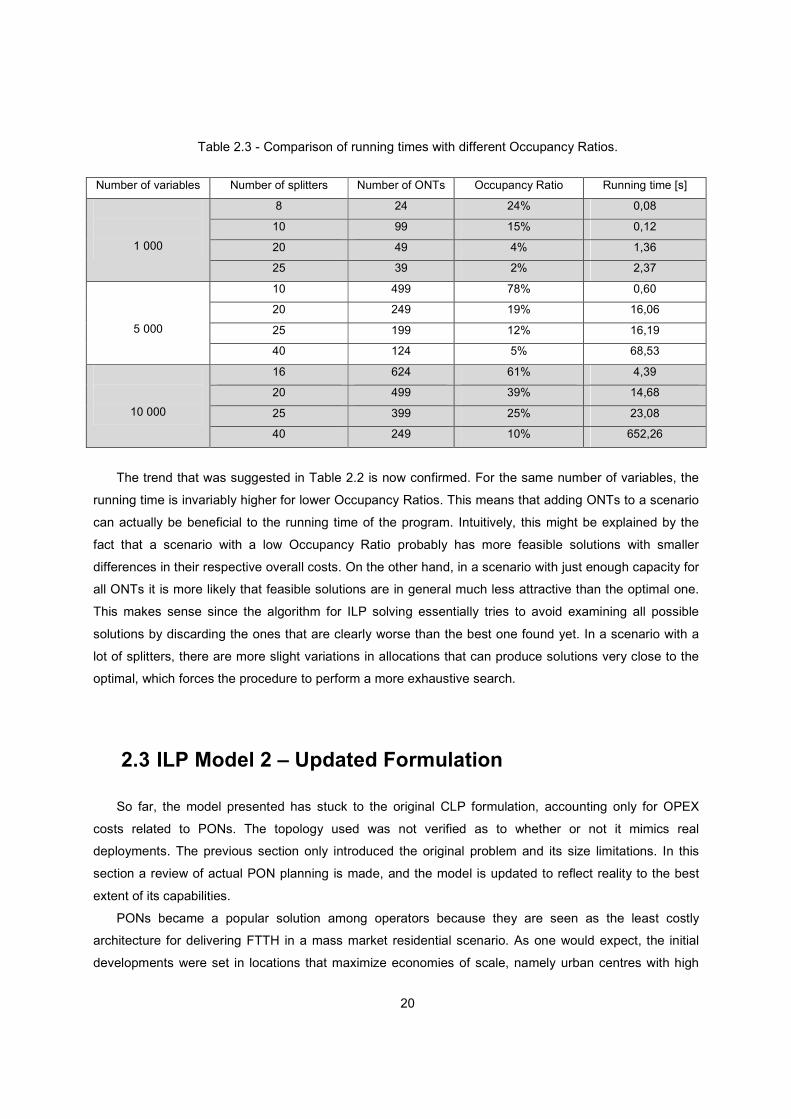
Table 2.3 - Comparison of running times with different Occupancy Ratios. ....................................... 20
Table 2.4 - Results for model with splitter co-location. ...................................................................... 25
Table 2.5 - List of costs considered. Source: [29] and Sonaecom. .................................................... 33
Table 2.6 - Test maps' dimensions. .................................................................................................. 33
Table 2.7 - Total network costs for original formulation. .................................................................... 34
Table 2.8 - Running times per method for original formulation. ......................................................... 35
Table 2.9 – Model 2 test scenarios' dimensions. .............................................................................. 36
Table 2.10 - Total network costs for updated formulation. ................................................................. 36
Table 2.11 - Running times per method for updated formulation. ...................................................... 37
Table 3.1 - Running times for multi-stage ILP model. ....................................................................... 49
Table 3.2 - Costs for exemplified scenario. ....................................................................................... 54
Table 3.3 - Multi-stage test scenarios' size. ...................................................................................... 56
Table 3.4 - Costs and running times for single and multi-stage PONs. .............................................. 56
Table 4.1 - Average system margins. ............................................................................................... 65
Table 4.2 - Costs for P2P. Source: [29]. ........................................................................................... 71
Table A.1 - Average GPON efficiency per number of users. ............................................................. 84
Table A.2 - Average liquid throughput per user for GPON. ............................................................... 84
Table A.3 - Average efficiency for EPON by number of users. .......................................................... 86
Table A.4 - Average throughput per user in EPON. .......................................................................... 86
Table A.5 - Average throughput in HFC by cell size. ........................................................................ 88
Table C.1 - GPON optical power levels for 2,488 Gbps downstream and 1,244 Gbps upstream.
Source: [39] ........................................................................................................................................... 95
Table C.2 - XG-PON1 optical power levels for 9,9533 Gbps downstream and 2,488 Gbps upstream
(class Nominal1). Source: [50]. .............................................................................................................. 96
Table C.3 - Attenuations for link elements. ....................................................................................... 97
Table C.4 - Attenuation coefficients and chromatic dispersion values for selected wavelenths. ......... 97
xi
List of Acronyms
ADSL Asymmetric Digital Subscriber Line
APON ATM Passive Optical Network
ATM Asynchronous Transfer Mode
BER Bit Error Ratio
BPON Broadband Passive Optical Network
CAPEX Capital Expenditure
CATV Cable Television
CLP Concentrator Location Problem
CMTS Cable Modem Termination System
DFB Distributed Feed-Back
DML Directly Modulated Laser
DOCSIS Data Over Cable Service Interface Specification
DSL Digital Subscriber Line
DSLAM Digital Subscriber Line Access Multiplexer
EFM Ethernet First Mile
EML Externally Modulated Laser
EPON Ethernet Passive Optical Network
FEC Forward Error Correction
FP Fabry-Perot
FSAN Full Service Access Networks
FTTB Fibre To The Building
FTTC Fibre To The Curb
FTTH Fibre To The Home
FTTN Fibre To The Node
FTTx Fibre To The x
GEM Generic Encapsulation Method
GPON Gigabit Passive Optical Network
HDTV High Definition Television
xii
HFC Hybrid Fibre-Coaxial
HHP Households Passed
ILP Integer Linear Program
IPTV Internet Protocol Television
LCC Local Convergence Cabinet
LCP Local Convergence Point
LP Linear Program
MILP Mixed Integer Linear Program
NAP Network Access Point
OPEX Operational Expenditure
OTDR Optical Time-Domain Reflectometre
P2MP Point To Multipoint
P2P Point to Point
PON Passive Optical Network
POTS Plain Old Telephone Service
QoS Quality of Service
RARA Recursive Association and Relocation Algorithm
RF Radio Frequency
TAP Terminal Assignment Problem
TDM Time Division Multiplexing
VDSL Very High Speed Digital Subscriber Line
WDM Wavelength Division Multiplexing

1
1. Introduction
This chapter presents an historical overview of Access Networks and how fibre-optics were
introduced in them. The motivation for this Thesis, its objectives and structure are also presented. A
review of the state of the art in the field of PON planning is conducted and the Thesis’ original
contributions are outlined.

2
1.1 Evolution of Access Networks
The evolution of fixed telecommunication networks denotes a clear unifying principle across
operators from all quadrants: integration of services. Traditionally telecommunication networks were
planned with the purpose of delivering a specific service, such as telephone in the now called Plain Old
Telephony Service (POTS) or television services in the Cable Television (CATV) networks. Nowadays the
trend lies in the concentration of a variety of services in the same network infrastructure. This tendency
can be traced back to telephone companies offering data and phone services simultaneously over their
existing copper lines. The growth of the Internet spurred an enormous increase in data traffic
consumption throughout the 1990’s [1], forcing operators to continuously update their networks with the
development of the various flavours of Digital Subscriber Line (DSL or xDSL to denote its various
versions). Increased bandwidths favoured the emergence of Internet Protocol Television (IPTV), which
also allowed these operators to provide television services through DSL. At the same time, CATV
operators sought the opportunity to reuse their own infrastructure, in order to provide internet access to
their customers. The Data Over Cable Service Interface Specification (DOCSIS) standard was launched
in 1997 with this purpose, and was revised throughout the years to improve transmission speeds and
overall efficiency, with the current version named DOCSIS 3.0, being released in 2006.
Today, it is customary for legacy phone and cable operators to provide the termed Triple-Play
service, consisting of High-Speed Internet Access, Television and Voice services on a single broadband
connection. Naturally, the accommodation of these services implies that much more bandwidth must be
available in the Access Network, which is responsible for connecting the subscriber to its service provider.
Because of its inherently more scattered nature, the Access Network has historically been known as the
last mile bottleneck, meaning that the capacity of the Access Network is usually what constraints the
available bit-rate of a subscriber.
While the use of fibre optics in core and metro networks has been commonplace since the late
1970s [2], until very recently the bulk of the fixed Access Networks was based on copper wires, be it
twisted pair or coaxial cable. The advantages of fibre over the copper lines lie mainly in its much lower
attenuation and immunity to electromagnetic interference, resulting in more bandwidth available at greater
distances. However, while the cost of fibre itself is relatively low, optical components like lasers and
photodetectors still pose a significant investment for operators. To keep costs down, such investments
must then be shared to serve as many subscribers as possible. While this is the case in long haul
networks, the introduction of fibre in the Access Network has been phased in time according to bandwidth
demand and the cost decrease of optical transceivers [3]. This introduction is conducted bringing the fibre
progressively closer to the subscriber’s premises. This is the case for both DSL lines and CATV networks,
where introducing fibre allows reducing the length of the copper wires, enabling the use of the latter in
higher frequency bands and/or using more aggressive modulation techniques to increase throughput
while maintaining adequate signal levels. This is usually known as the various flavours of Fibre In The
3
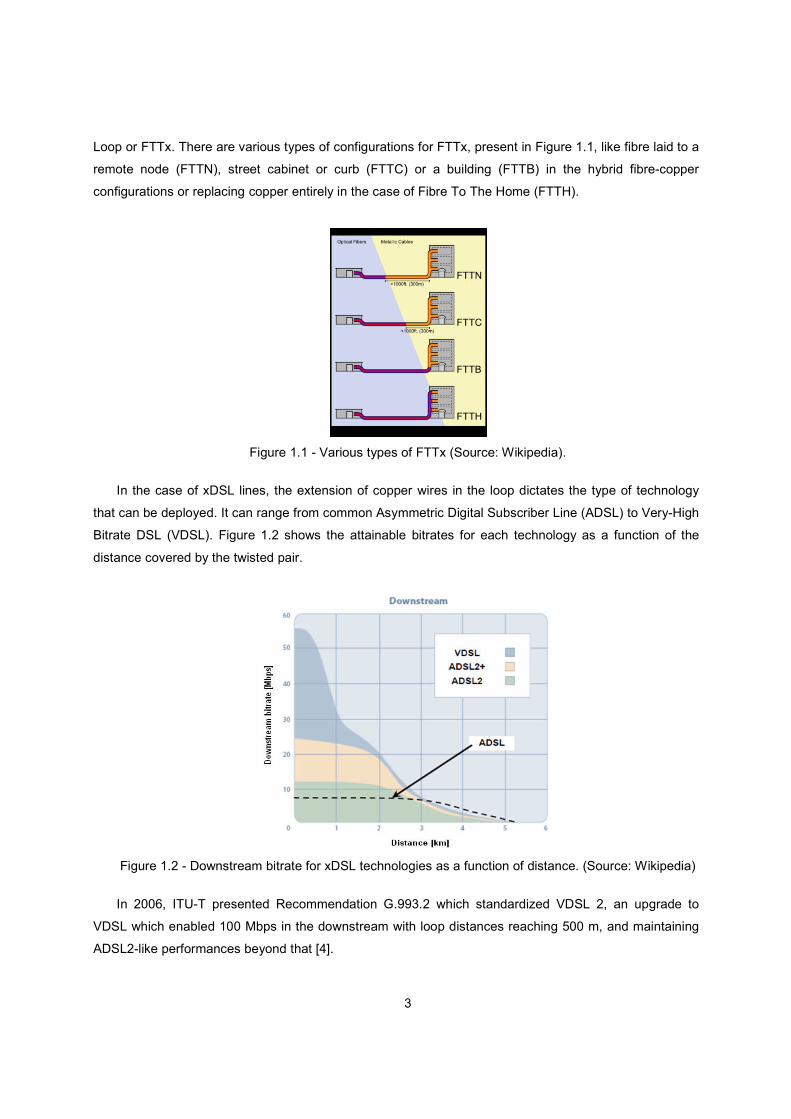
Loop or FTTx. There are various types of configurations for FTTx, present in Figure 1.1, like fibre laid to a
remote node (FTTN), street cabinet or curb (FTTC) or a building (FTTB) in the hybrid fibre-copper
configurations or replacing copper entirely in the case of Fibre To The Home (FTTH).
Figure 1.1 - Various types of FTTx (Source: Wikipedia).
In the case of xDSL lines, the extension of copper wires in the loop dictates the type of technology
that can be deployed. It can range from common Asymmetric Digital Subscriber Line (ADSL) to Very-High
Bitrate DSL (VDSL). Figure 1.2 shows the attainable bitrates for each technology as a function of the
distance covered by the twisted pair.
Figure 1.2 - Downstream bitrate for xDSL technologies as a function of distance. (Source: Wikipedia)
In 2006, ITU-T presented Recommendation G.993.2 which standardized VDSL 2, an upgrade to
VDSL which enabled 100 Mbps in the downstream with loop distances reaching 500 m, and maintaining
ADSL2-like performances beyond that [4].
4
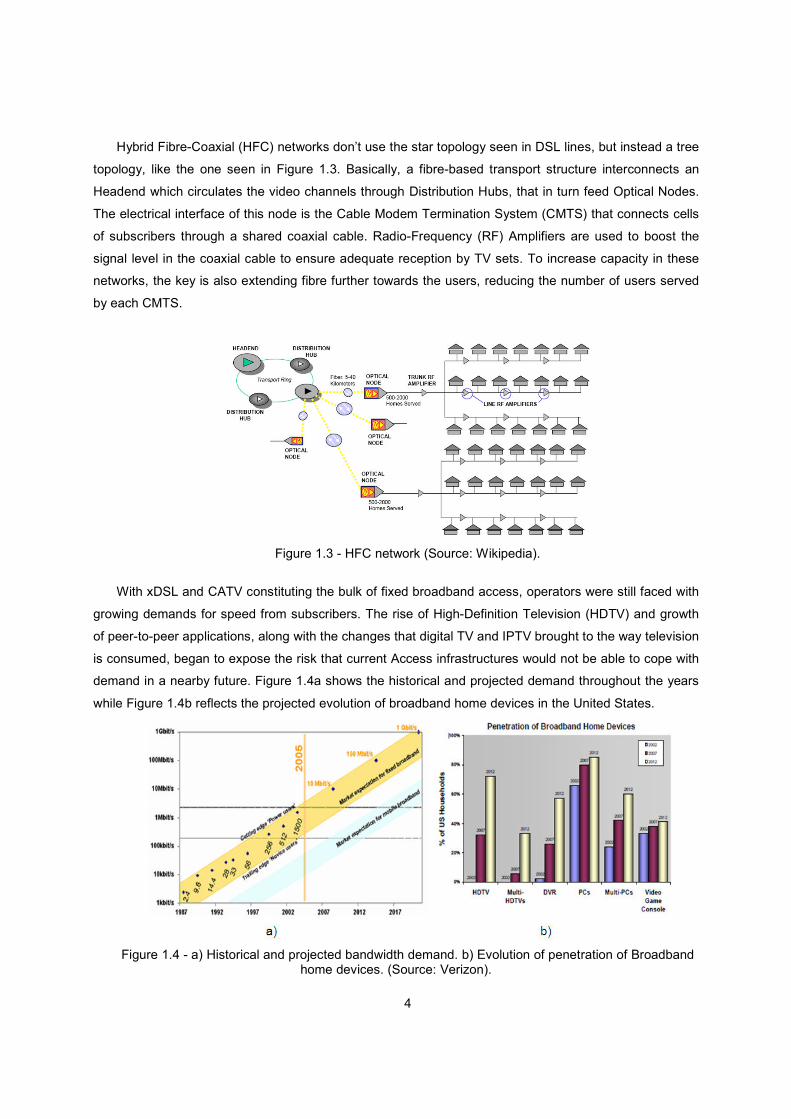
Hybrid Fibre-Coaxial (HFC) networks don’t use the star topology seen in DSL lines, but instead a tree
topology, like the one seen in Figure 1.3. Basically, a fibre-based transport structure interconnects an
Headend which circulates the video channels through Distribution Hubs, that in turn feed Optical Nodes.
The electrical interface of this node is the Cable Modem Termination System (CMTS) that connects cells
of subscribers through a shared coaxial cable. Radio-Frequency (RF) Amplifiers are used to boost the
signal level in the coaxial cable to ensure adequate reception by TV sets. To increase capacity in these
networks, the key is also extending fibre further towards the users, reducing the number of users served
by each CMTS.
Figure 1.3 - HFC network (Source: Wikipedia).
With xDSL and CATV constituting the bulk of fixed broadband access, operators were still faced with
growing demands for speed from subscribers. The rise of High-Definition Television (HDTV) and growth
of peer-to-peer applications, along with the changes that digital TV and IPTV brought to the way television
is consumed, began to expose the risk that current Access infrastructures would not be able to cope with
demand in a nearby future. Figure 1.4a shows the historical and projected demand throughout the years
while Figure 1.4b reflects the projected evolution of broadband home devices in the United States.
Figure 1.4 - a) Historical and projected bandwidth demand. b) Evolution of penetration of Broadband home devices. (Source: Verizon).
5
Figure 1.4a paints a clear picture of the challenges operators face concerning the update of Access
Networks. While some have opted to upgrade to more advanced xDSL solutions like ADSL2+, VDSL or
VDSL2 [5], most see this as a temporary “fix”, that will only delay the inevitable road to FTTH. While
VDSL2 does provide near 100 Mbps per user in the downstream, it does so with a local loop consisting
almost entirely of fibre. Therefore, it made sense for a lot of operators to skip that step and go for an all-
fibre solution, allowing them to future-proof their networks. As for cable companies, since HFC networks
offer a wider margin to accommodate demand, the penetration of fibre is taking place at a slower pace,
using mostly strategies of node splitting. For more on the capacity of HFC and DOCSIS, refer to
APPENDIX A.
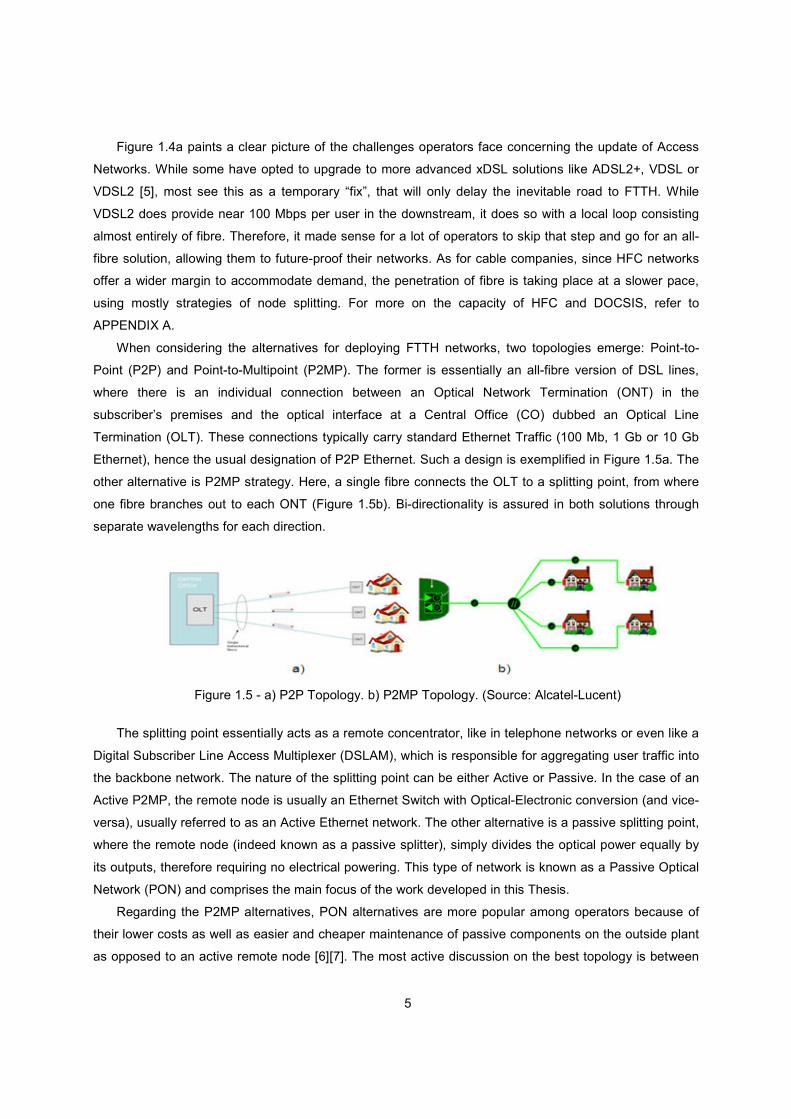
When considering the alternatives for deploying FTTH networks, two topologies emerge: Point-to-
Point (P2P) and Point-to-Multipoint (P2MP). The former is essentially an all-fibre version of DSL lines,
where there is an individual connection between an Optical Network Termination (ONT) in the
subscriber’s premises and the optical interface at a Central Office (CO) dubbed an Optical Line
Termination (OLT). These connections typically carry standard Ethernet Traffic (100 Mb, 1 Gb or 10 Gb
Ethernet), hence the usual designation of P2P Ethernet. Such a design is exemplified in Figure 1.5a. The
other alternative is P2MP strategy. Here, a single fibre connects the OLT to a splitting point, from where
one fibre branches out to each ONT (Figure 1.5b). Bi-directionality is assured in both solutions through
separate wavelengths for each direction.
Figure 1.5 - a) P2P Topology. b) P2MP Topology. (Source: Alcatel-Lucent)
The splitting point essentially acts as a remote concentrator, like in telephone networks or even like a
Digital Subscriber Line Access Multiplexer (DSLAM), which is responsible for aggregating user traffic into
the backbone network. The nature of the splitting point can be either Active or Passive. In the case of an
Active P2MP, the remote node is usually an Ethernet Switch with Optical-Electronic conversion (and vice-
versa), usually referred to as an Active Ethernet network. The other alternative is a passive splitting point,
where the remote node (indeed known as a passive splitter), simply divides the optical power equally by
its outputs, therefore requiring no electrical powering. This type of network is known as a Passive Optical
Network (PON) and comprises the main focus of the work developed in this Thesis.
Regarding the P2MP alternatives, PON alternatives are more popular among operators because of
their lower costs as well as easier and cheaper maintenance of passive components on the outside plant
as opposed to an active remote node [6][7]. The most active discussion on the best topology is between

6
PON and P2P networks. The comparison here is much harder since the topologies themselves are
different, and specific scenarios might favour one approach over the other. In short, P2P solutions are
seen as having better overall capacity and security, since they offer dedicated connections to each
subscriber, while PONs must share the capacity of a single fibre over all the users covered and require
the use of encryption mechanisms to prevent eavesdropping since the entire bit stream is available to
every ONT in the PON. On the other hand, a PON offers less fibre expenditure and reduced operational
costs since it only needs one interface at the OLT per PON, while a P2P architecture requires one per
subscriber, driving up running costs on power and space taken at the CO [8] [9].
Several technologies make use of a PON architecture. They differ amongst themselves essentially on
the protocols they use and the classes of equipments defined. The first technology to be standardized
was a PON carrying the then popular Asynchronous Transfer Mode (ATM) traffic, called ATM-PON
(APON). Standardized as ITU-T Rec. G.983.1 in 1998, it envisioned bitrates of 622 and 155,52 Mbps in
the downstream and upstream directions respectively [10]. It was a Time-Division Multiplexing (TDM)
PON, meaning the information pertaining and belonging to each user is transmitted in different instants,
and conveniently marked so the intended receiver knows which packets belong to him. TDM-PONs are
still the prevalent PON technology today. In 2001, APON was encapsulated in a broader
Recommendation (ITU-T G.983) which detailed the aspects of Broadband PON (BPON). BPON had
updated rates of 1,244 Gbps in the downstream and 622 Mbps in the upstream and also introduced Video
Overlay, a Wavelength Division Multiplexing (WDM) strategy that involves a dedicated wavelength at
1550 nm to transmit a RF video signal.
The popularity of Ethernet in local networks and its growth in metro networks (through Carrier
Ethernet) made an Ethernet-based Access Network very attractive in terms of interoperability.
Furthermore, the rise in IP traffic meant that the fixed 53 byte ATM cells used in APON/BPON burdened
much larger IP Packets with unnecessary overhead (the cell tax), making the process very inefficient. In
this context, among the solutions presented in 2004 for Ethernet in the Access by the Ethernet First Mile
(EFM) group one can find Ethernet PON (EPON), as standard IEEE 802.3ah. EPON follows the Ethernet
philosophy of low cost and simple operation which made it popular for early deployments in Asian
countries [11]. EPON carries symmetrical 1 Gbps Ethernet traffic (with a 1,25 Gbps line rate using 8B/10B
encoding) and originally allowed splitting ratios up to 1:32.
The low efficiency of BPON for IP traffic and the shortcomings of Ethernet when it comes to
applications with strict time demands like voice or IPTV, led the Full Service Access Network (FSAN)
group to develop a more versatile PON, capable of efficiently carrying all kinds of traffic. Thus the ITU-T
G.984 standard was born, introducing the Gigabit-PON (GPON). Unlike EPON, GPON was designed from
an operator and service point of view. This is reflected in its embedded Quality of Service (QoS)
requirements, which are not inherent in EPON. Also, it uses a General Encapsulation Method (GEM)
which aims to efficiently carry all types of traffic (including Ethernet). It presents bitrates of up to 2,488
Gbps in both directions (although 1,244 Gbps is the most common in the upstream) and has a maximum
7
split ratio of 1:64 with a maximum range of 20 km. It is however more complex and expensive than
EPON. Its service-oriented philosophy garnered it popularity among operators in Europe and North
America [11]. Despite the fact that the work performed in this Thesis tries to maintain an approach
applicable to any TDM-PON technology, the technological aspects like bitrates and maximum splitting
ratios and the costs considered in the PON deployment and operation pertain to GPON, since it is the
only technology deployed in the region where the work was performed and as such where practical
information was readily available.
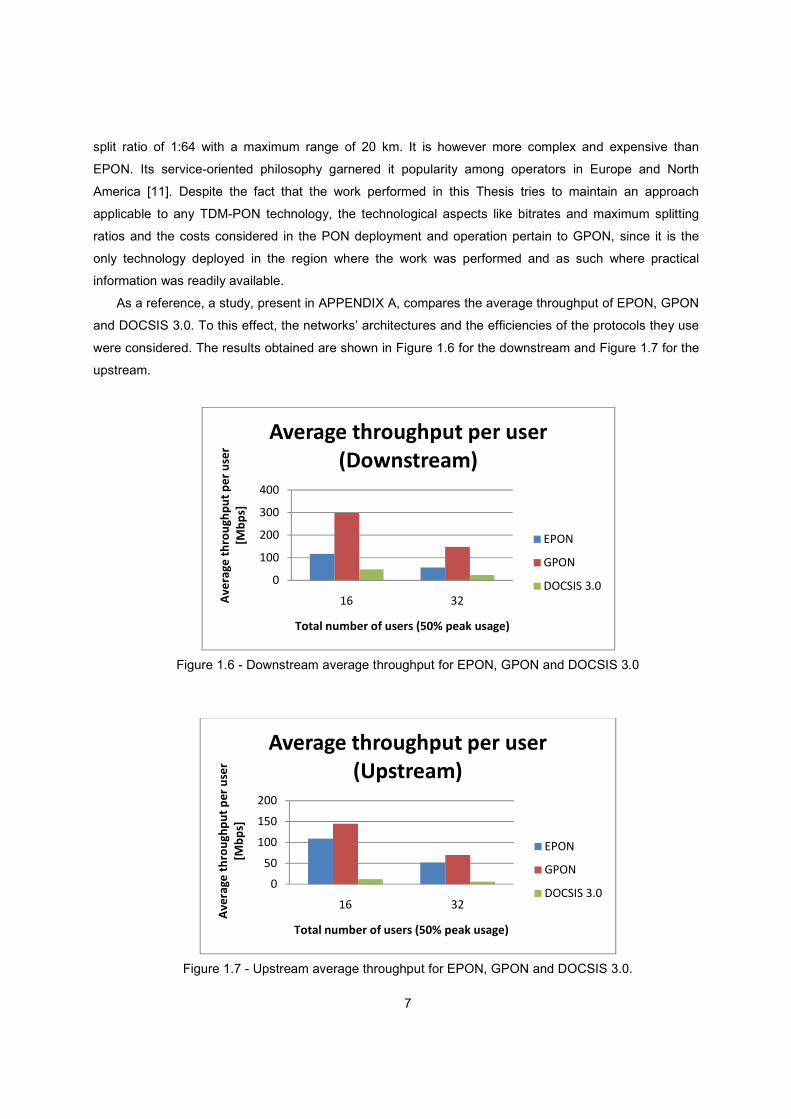
As a reference, a study, present in APPENDIX A, compares the average throughput of EPON, GPON
and DOCSIS 3.0. To this effect, the networks’ architectures and the efficiencies of the protocols they use
were considered. The results obtained are shown in Figure 1.6 for the downstream and Figure 1.7 for the
upstream.
Figure 1.6 - Downstream average throughput for EPON, GPON and DOCSIS 3.0
Figure 1.7 - Upstream average throughput for EPON, GPON and DOCSIS 3.0.
0
100
200
300
400
16 32Av
era
ge
th
rou
gh
pu
t p
er
use
r
[Mb
ps]
Total number of users (50% peak usage)
Average throughput per user
(Downstream)
EPON
GPON
DOCSIS 3.0
0
50
100
150
200
16 32
Av
era
ge
th
rou
gh
pu
t p
er
use
r
[Mb
ps]
Total number of users (50% peak usage)
Average throughput per user
(Upstream)
EPON
GPON
DOCSIS 3.0

8
The main conclusion that arises from these results is that indeed fibre offers a new degree of
potential for offering bandwidth in the Access Network.
1.2 State of the Art
Given how the PON market has grown exponentially in the last decade and is expected to keep
growing in the near future [11], the issue of PON planning is of key importance. Deploying a PON implies
massive investments in labour and equipment. It is therefore crucial to understand all the stages in
planning a PON and identify in which of them more efficient strategies can be elaborated in order to allow
for cost savings.
The field of network planning in general has been the focus of extensive research. Because it is such
a broad area, it is important to specify the scope of the planning/optimization intended. In the case of
PONs, the interest lies in Access Networks. Furthermore, because of the PON general architecture,
Access Networks with concentrator nodes are of particular interest. On this topic, [12] offers a
comprehensive review of the work completed in the optimization of hub locations in tributary/backbone
networks. This includes a very wide range of networks and several aspects to optimize: cost, reliability,
traffic engineering, and others. In the framework of this Thesis, demand patterns are considered constant
throughout all users, so routing issues are discarded. The focus of the optimization process is cost. The
main building block of most of the models developed in this work is the Concentrator Location Problem
(CLP), which is described in [13] and detailed in Chapter 2.
Regarding the area of PON planning, the work presented in [14] applies genetic algorithms for the
design of greenfield PONs, meaning a PON designed in a scenario without any existing infrastructure
(cable-ducts for instance). The scenario considered in [14] has three layers: the connection of users to
hosts, the allocation of service boxes to hosts and the design of the PON itself, with the hosts acting as
ONTs, who connect to splitters who in turn connect to the OLT. Obviously, this is not an FTTH
architecture, since the fibre only runs to the hosts, who in turn connect users with service boxes, which
are interfaces for several types of traffic. The third layer is therefore the one which has common ground
with the work in this Thesis. However, since a lot of the effort lies in optimizing host capacity to service
demand and connect the users, the scenario considered for just the PON involves two possible OLT
locations, ten possible splitter locations and 100 hosts (or ONTs). This is relatively small for the kind of
residential mass-market PONs that are currently being deployed. Furthermore, the design of the optical
network is admittedly simplified by the authors, since it does not account for specific PON details,
reducing the problem to a more classic hierarchical computer network case.
A tool termed PON Builder is presented in [15] and partially summarized in [16]. The author takes a
very complete approach to the issue of automating the physical layout of a PON, given the location of the
OLT and all the ONTs. The work is mainly focused on using a graph-theory approach to finding the least

9
costly set of ducts and fibres that interconnect the ONTs, the splitter and the OLT. This includes
accounting for obstacles in the map (roads, buildings…) and already existing ducts to extract the best
possible layout for the fibre cables. The splitter location is either defined a priori as the arithmetic mean of
the ONT and OLT locations, or placed after the layout is set in the first derivation of the cable starting
from the OLT. When the scenario includes more ONTs than a single PON can accommodate, some
clustering techniques are applied to geographically separate the ONTs into logical PONs and then the
program is executed for each PON. While the duct-layout part of the program is very thorough and seems
to provide good results on realistic scenarios, other aspects receive less attention. The program runs on
the (truthful) assumption that the costs of digging ducts and laying fibre are much greater than the ones of
the fibre itself. Therefore the fibre connections of the PON are largely ignored. This implies that the
splitter location is essentially not a variable because it doesn’t have much impact on the duct layout, but it
has a considerable one on the fibres that run through the ducts. Also, power budget constraints are not
considered. Finally, there is a separation between the procedure of assigning users to a PON (done
through clustering) and the network layout procedure itself. It could be advantageous to address both
problems together since the clustering procedure is done based on an intuitive geographical notion, which
does not necessarily ensure the cheapest network considering the scenarios’ obstacles and existing
ducts. It should be noted that the work developed in this Thesis is more complementary than juxtaposing
relative to [15]. The models developed here assume the costs of connecting the different (possible)
network elements are already known or estimated. PON Builder does a comprehensive work in such
calculations. Therefore it could be combined with this approach which is more concerned with optimal
allocation of users to terminals and placement of splitters, by feeding it with the connection costs it
calculated.
A more recent approach is presented in [17], which proposes an algorithm aimed at producing least-
cost deployments for greenfield PONs with scenarios ranging in the hundreds of ONTs. The authors
present a heuristic procedure that they call Recursive Association and Relocation Algorithm (RARA). The
algorithm receives the OLT and ONT locations as input. It starts with a randomly assigned set of splitters
and then recursively allocates ONTs to splitters and updates the splitters’ locations until convergence of
the solution costs is obtained. The authors also present an Integer Linear Programming (ILP) model for
PON assignment which is part of the overall algorithm. This model shares some features with the one
developed in this Thesis, and takes great care to ensure the PON constraints like power budget or
differential distance are met. However the authors state that the model is too complex for the bigger
scenarios and so it is only used for the medium-sized ones (with a few hundred ONTs). Results show that
the heuristic algorithm produces results for a scenario with 600 ONTs in between 20 and 40 hours.
Another strategy was developed which essentially acts as a clustering procedure. The ONTs are divided
in two scenarios according to their distance to the OLT and the algorithm is executed for both scenarios
separately. This allows improvement in the computation time while the authors assure the performance of
the algorithm isn’t significantly affected. It seems that this work finds more usefulness in PONs serving

10
less densely populated areas. This is because in the most common deployment scenarios, in very
crowded areas, the planning procedures usually involve cells that cover up to a few thousand users,
which by the results shown goes beyond the practical capacity of the algorithm. Also, in more urban
scenarios, splitters are deployed in so called Junction Boxes, which house arrays of several splitters, to
concentrate the installation costs and network points of access in case of repairs or updates.
Furthermore, as it will be explained later on, geographical criteria are not necessarily the best ones to
separate ONTs into specific PONs. There is no mention of Operational Expenditures (OPEX) affecting the
model in any way. Finally, the designs considered are only of single-staged splitting, without mention of
other configurations.
1.3 Motivation, Objectives and Structure
The academic approaches detailed in the previous section deal with various aspects of automating
and optimizing PON planning, like best-path calculations for fibre connections, splitter placement and
ONT clustering. The core of the work, however, lies in either the geographic layout of the connections or
the clustering of sets of ONTs into logical PONs. As it will be made clearer later, these problems, while
worth addressing, do not account for all the issues that operators face when deploying PONs, namely
OPEX and the subscriber take-rate. Furthermore, no approach was found which enabled more flexible
PON designs, specifically multi-stage PONs with cascaded splitters. Classical network planning software
packages already offer support for PONs, by updating the existing tools to reflect PON constraints
[18][19], but the underlying methods to do so are naturally undisclosed.
The work performed in this Thesis comprises three main objectives. Firstly, to develop an ILP model
that partially describes the problem of PON planning, while assessing practicality of such approach and
suggesting other sub-optimal algorithms.
The second main objective is to develop another ILP model that allows for multi-staged PON
structures, and again assess its practicality and experiment alternative approaches. This should allow the
analysis of potential benefits or lack thereof in using such configurations as opposed to the more standard
ones used in the industry.
Finally, this Thesis also aims to draw a comparison between PON and P2P solutions in terms of costs
and bitrates provided, as well as evaluate the challenges of evolving current PONs into the next
generation at 10 Gbps.
This work is structured as follows: Chapter 1 presents an historical introduction to the evolution of
Access Networks and the emergence of FTTH solutions and how they compare to HFC networks. Then, it
presents the state of the art on the subject of PON planning, outlines the motivation, objectives and
structure of the document and presents the original contributions of the Thesis. Chapter 2 elaborates on
the issues of PON planning, and then proceeds to present the ILP model for the problem and the sub-
11
optimal algorithms also proposed. Their comparative results are shown and discussed. Chapter 3 shows
the ILP model for multi-stage PONs compared with another algorithm developed with the same purpose.
Chapter 4 tackles more technological issues, such as the preparedness of the networks calculated in
Chapter 2 to cope with an evolution to the next standard in PONs and the comparison of PON topologies
with P2P. Finally, Chapter 5 contains a general reflection on the work performed and its results and
outlines the directions for future work in this area.
1.4 Original Contributions
The work presented in this Thesis differs or deepens the approaches described in the previous
section in the following ways: an ILP model was developed and assessed for single-stage PON planning,
in realistic scenarios with up to thousands of ONTs using actual field-deployed PON configurations and
accounting for factors like OPEX which are largely ignored in the literature reviewed. Several heuristics
were also proposed in this context. Another ILP model was developed to plan multi-stage PONs. To the
best knowledge of the author, no work in the area of multi-stage PONs is available, meaning the work
performed here is an entirely new approach. A two-stage PON heuristic was also developed for
comparison purposes.
The developed models were also reused and altered to evaluate the issues concerning the evolution
to the next generation of PONs and the potential benefits and drawbacks of PON and P2P.
12
2. PON Planning
This chapter includes a review of the classical concepts for network planning and optimization and
how they can be applied to the case of PONs. The original ILP model for that purpose is then presented.
The faithfulness of the model is then evaluated against real PON deployments and the resulting additions
to the ILP are introduced. In the following section some heuristic methods are proposed to try and
achieve lower computational times with similar results. Finally, the results of the model are evaluated in
terms of computational complexity and its performance compared against the heuristics.
13
2.1 Network Planning
As mentioned in Chapter 1, we are interested in algorithms for the planning of networks with
concentrator nodes, or hubs. In all the literature reviewed by [12], the concept of a hub is very broad. In
the context of PONs, the hub is naturally the splitter which acts as a concentrator, since it connects
several users to the CO in a star topology. When considering various hubs connecting to the CO, we are
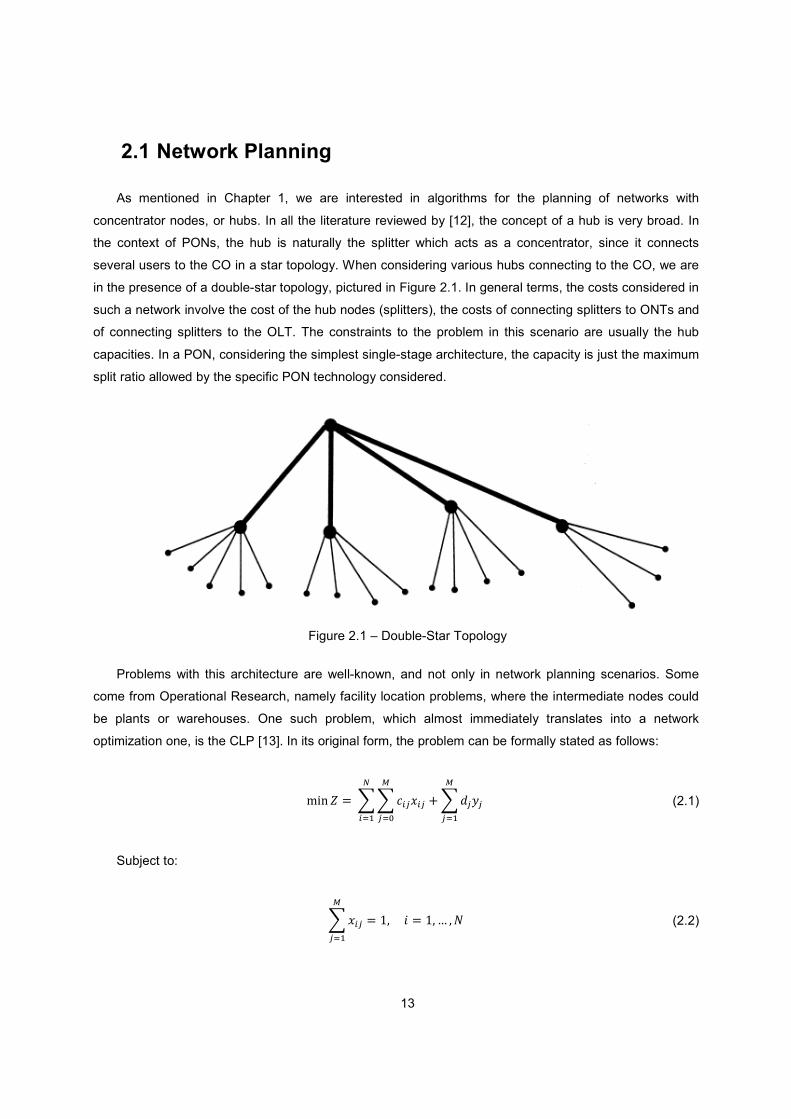
in the presence of a double-star topology, pictured in Figure 2.1. In general terms, the costs considered in
such a network involve the cost of the hub nodes (splitters), the costs of connecting splitters to ONTs and
of connecting splitters to the OLT. The constraints to the problem in this scenario are usually the hub
capacities. In a PON, considering the simplest single-stage architecture, the capacity is just the maximum
split ratio allowed by the specific PON technology considered.
Figure 2.1 – Double-Star Topology
Problems with this architecture are well-known, and not only in network planning scenarios. Some
come from Operational Research, namely facility location problems, where the intermediate nodes could
be plants or warehouses. One such problem, which almost immediately translates into a network
optimization one, is the CLP [13]. In its original form, the problem can be formally stated as follows:
��� � � ����� �� ��
��
�
��
�
��� (2.1)
Subject to:
�� � �������� � ��� � ��
�� (2.2)

14
�� � ���
��������� � ��� ������� (2.3)
The variables � and � are defined as follows:
� � ��� ���� !�"�� �#!"$!! �"!%&� �'���� ��� �! "%�"�%�(�)*�+,+-.� �"/!%$�0!-1 (2.4)
� � 2�� 3�45�4)�,63,56��+�7543,)8�3,�(-.� �"/!%$�0!- 1 (2.5)
The problem minimizes Z, the total cost of the network, with�� terminals and � concentrators. The
costs are � for the cost of connecting terminal � to concentrator �, and for the cost of connecting
concentrator � to the central node, as well as the cost of the concentrator itself. The capacity of
concentrator � s given by �. Constraint (2.2) ensures that each terminal connects to one and only one
concentrator while constraint (2.3) ensures the capacity of the concentrator is not exceeded.
The problem is formulated as an ILP. Linear Programs (LP) are problems that have a linear cost
function and linear constraints (equalities and inequalities). If a bounded solution exists for the problem, it
can be shown that it lies on the boundary of the feasible set defined by the constraints. The algorithms
used in solving the problem (most commonly the Simplex method), are able to provide optimal solutions
even for very complex models with large amounts of variables in reasonable time [20]. This occurs,
however, only when the variables to optimize are real. In the case of the problem mentioned above, all of
the variables are integer (in fact, binary). This is the aforementioned ILP class of problems. Such
problems are usually much harder to solve for large numbers of variables, because the solving
procedures often rely on enumerating feasible solutions which is a very time-consuming task [21]. Indeed,
[13] mentions that the problem formulated above is unsuitable for large networks because of
unreasonable running times. However, two aspects justify the adoption of ILP models. First, even for very
prolonged running times, obtaining a solution that we know to be optimal is important to benchmark other
approaches to the same problem. Second, [13] dates back from 1977, when computational power was
much lower than today, so it would be interesting to investigate how large a network can be optimized
today, using the referred formulation.
Another problem that deserves attention since it will be extensively applied throughout this work is the
Terminal Assignment Problem (TAP). This problem is a sort of building block for the CLP, or a relaxed
version of it. Simply put, TAP removes the cost of concentrators (and their connection to the central site)
from the problem. The number and location of the concentrators on the scenario is fixed. We are then left
with the task of assigning terminals to concentrators while meeting the capacity restrictions of each
concentrator. The problem can be stated as:

15
���� ������
��
�
�� (2.6)
Subject to:
�� � �������� � ��� � ��
�� (2.7)
�� � ��
��������� � ��� �� (2.8)
According to [13], this problem can be solved in polynomial time with specific algorithms. This is
attractive in the sense that the TAP is a relaxation of the CLP, and as such can be used in conjunction
with heuristic approaches to achieve good solutions for the CLP quickly. One such approach is the ADD
heuristic, which will be detailed in 2.4.1.
2.2 ILP Model 1 – Original Formulation
As mentioned in the previous section, the CLP has a fairly straightforward translation to PONs. The
concentrator becomes the splitter, terminals are the ONTs and the central node is the OLT. The capacity
� of each splitter is fixed according to the maximum split allowed. In fact, the first version tested has only
a minor change in the cost coefficients relative to the model presented in (2.1). OPEX costs are usually
not considered in these scenarios, as they are more difficult to measure and translate into a linear
structure. However, the early simulations done with the model show a clear discrepancy with actual PON
deployments. Specifically, because the costs considered account for equipment (OLT line cards, splitters,
fibre) and construction (construction work, laying fibre), the program minimizes the layout of the network
based on these premises. This in turn led to results which favoured minimal duct use over minimal line
card use, because the cost structure indicates so. The missing factor here is OPEX. Actual deployments
minimize the number of PONs (as in active OLT terminals) because it means less OPEX in maintaining
them over the long course. This was incorporated into the model simply by adding a coefficient 9:;<
which reflects the cost of the line card itself as well as that of operating and maintaining a PON over a
given period of time. This coefficient obviously applies to � and could be lumped with which already
accounts for the costs associated with connecting the OLT to the splitter. However, for reasons that will
be clarified later on with the updated version of the model proposed here, there is an advantage in
keeping the coefficients separate to have more granularity. The problem is now stated as:
16
��� � � ����� ��= � 9:;<> ? ��
��
�
��
�
�� (2.9)
And is still subject to restrictions (2.2) and (2.3). The ILP was implemented using the free-licensed
solver lpsolve [22], which was interfaced with MATLAB® where the scenarios were created and the costs
calculated. For more details on the software implementation refer to APPENDIX B.
2.2.1 Costs and Scenarios
The inputs for the ILP model are the costs of equipment, the costs of connecting the network
elements and the operational costs of running a PON. The equipment costs are the most simple among
these. Operational costs are difficult to estimate but do not affect the validity of the model’s structure. The
connection costs, however, are more problematic. The model assumes the costs of interconnecting
elements (ONTs to splitters and these to the OLT) are known in advance. This assumption is by default
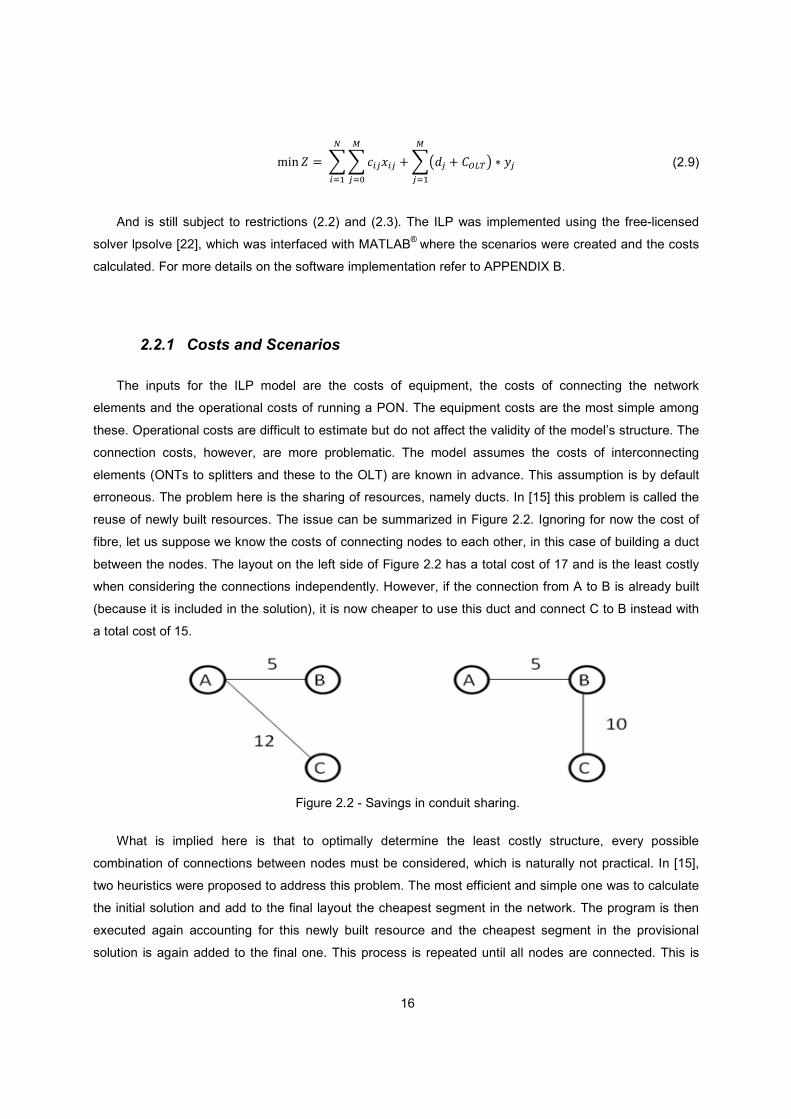
erroneous. The problem here is the sharing of resources, namely ducts. In [15] this problem is called the
reuse of newly built resources. The issue can be summarized in Figure 2.2. Ignoring for now the cost of
fibre, let us suppose we know the costs of connecting nodes to each other, in this case of building a duct
between the nodes. The layout on the left side of Figure 2.2 has a total cost of 17 and is the least costly
when considering the connections independently. However, if the connection from A to B is already built
(because it is included in the solution), it is now cheaper to use this duct and connect C to B instead with
a total cost of 15.
Figure 2.2 - Savings in conduit sharing.
What is implied here is that to optimally determine the least costly structure, every possible
combination of connections between nodes must be considered, which is naturally not practical. In [15],
two heuristics were proposed to address this problem. The most efficient and simple one was to calculate
the initial solution and add to the final layout the cheapest segment in the network. The program is then
executed again accounting for this newly built resource and the cheapest segment in the provisional
solution is again added to the final one. This process is repeated until all nodes are connected. This is
17
adequate to the graph theory approach of [15]. For the ILP model, however, the costs must be known a
priori which has been shown not to be possible. Essentially, the connections costs are non-linear (i.e.
they depend on other connections), and as such cannot be formulated into an ILP without enumerating
every possible connection layout. The solutions provided by the program are therefore not optimal since
they do not account for conduit sharing. However, some practical reasons mitigate this effect. In urban
areas, PON deployments overwhelmingly use already existing ducts. This means that there are usually
well-defined duct paths to interconnect terminals to a CO. In this sense, the costs of connections are for
the most part known in advance. The error now lies in the fact that two connections that share a common
segment will also share a fibre cable. Since the cost of cables is dependent on the number of fibres they
carry it is impossible to account for this directly since it cannot be known in advance how many fibres will
use a given segment. When looking at the cost structure of the problem though, it can be noticed that this
is less likely to impact the overall layout of the network because the difference between the costs of
various cable types weighs much less on the overall cost of the network than that of deciding whether or
not to build a new duct. When considering greenfield areas or scenarios with insufficient infrastructure for
laying fibre, a tool like [15] can be used to obtain the layout of the infrastructure and the costs of laying
fibre can be derived from that information and fed to the ILP.
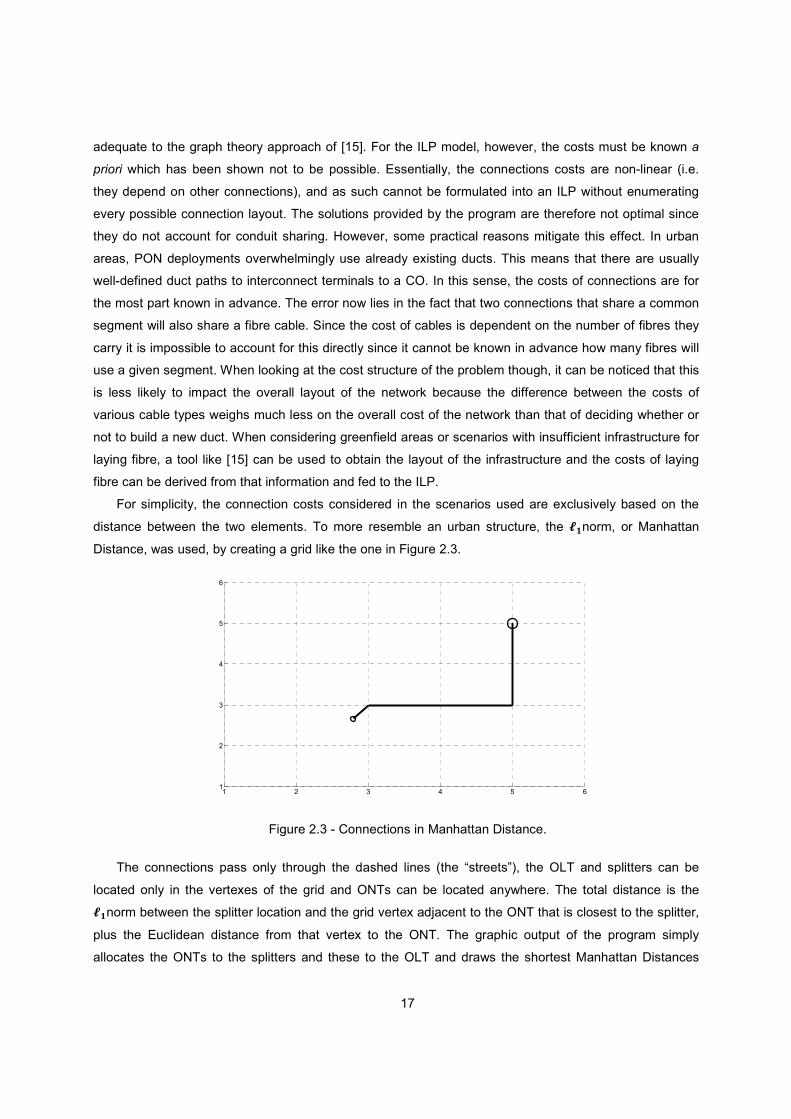
For simplicity, the connection costs considered in the scenarios used are exclusively based on the
distance between the two elements. To more resemble an urban structure, the @Anorm, or Manhattan
Distance, was used, by creating a grid like the one in Figure 2.3.
Figure 2.3 - Connections in Manhattan Distance.
The connections pass only through the dashed lines (the “streets”), the OLT and splitters can be
located only in the vertexes of the grid and ONTs can be located anywhere. The total distance is the
@Anorm between the splitter location and the grid vertex adjacent to the ONT that is closest to the splitter,
plus the Euclidean distance from that vertex to the ONT. The graphic output of the program simply
allocates the ONTs to the splitters and these to the OLT and draws the shortest Manhattan Distances
1 2 3 4 5 61
2
3
4
5
6
18
between them. Examples of the visual output of the program for both Manhattan and Euclidean distances
can be found in APPENDIX B.
2.2.2 Performance and Scalability
One of the most important aspects when evaluating an ILP model is to ascertain the scalability of the
problem. In cases such as this, where variables denote the existence or not of a connection between
every hierarchical combination of network elements, the complexity is expected to grow exponentially as
the scenarios get larger. This reflects not only on the running time of the problem, but also on the memory
occupation when scenarios become very large. Looking closely at (2.9) it becomes clear that the number
of variables in the program is (� ? � ��B. The number of restrictions on the other hand is � ��. This
means that for a given scenario, to allocate the restriction matrix, a total of C ? D� ? � � �B ? D� � �B bytes of contiguous free memory are required. For a scenario with 2 000 ONTs and 50 possible splitter
locations, more than 1,6 GB of memory is needed.
In order to evaluate, in an earlier stage, if the ILP approach was worth pursuing, several scenarios
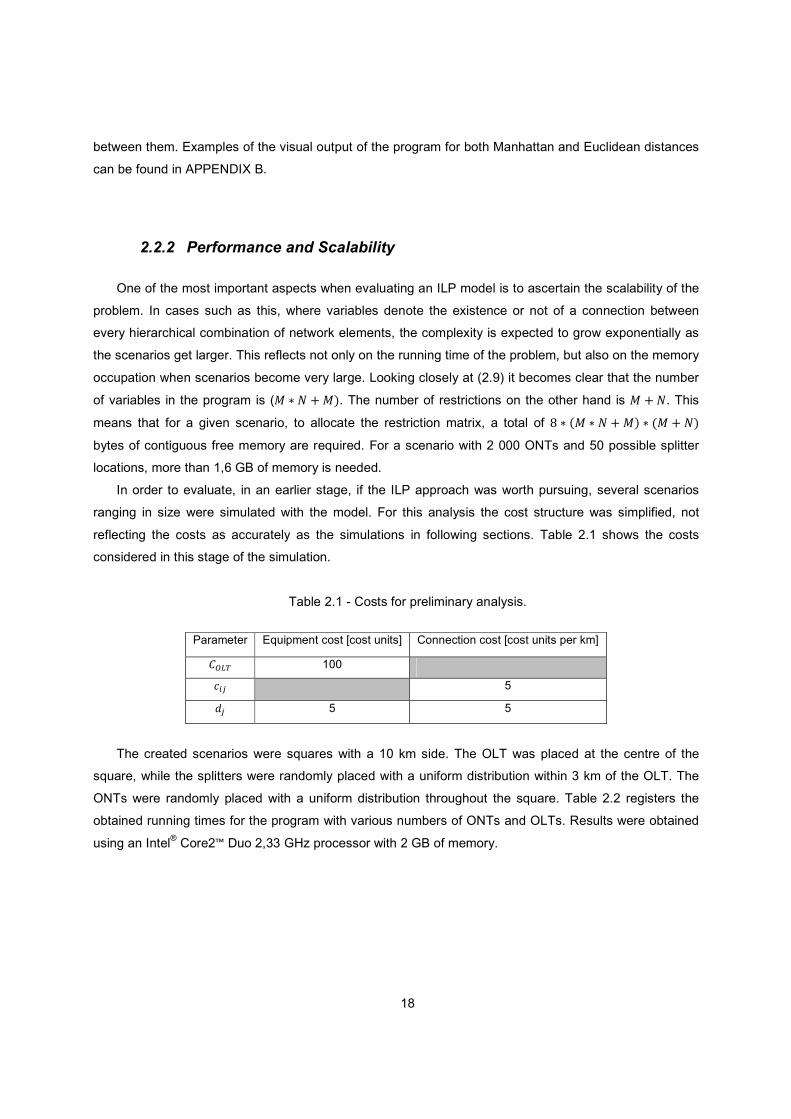
ranging in size were simulated with the model. For this analysis the cost structure was simplified, not
reflecting the costs as accurately as the simulations in following sections. Table 2.1 shows the costs
considered in this stage of the simulation.
Table 2.1 - Costs for preliminary analysis.
Parameter Equipment cost [cost units] Connection cost [cost units per km]
9:;< 100
� 5
5 5
The created scenarios were squares with a 10 km side. The OLT was placed at the centre of the
square, while the splitters were randomly placed with a uniform distribution within 3 km of the OLT. The
ONTs were randomly placed with a uniform distribution throughout the square. Table 2.2 registers the
obtained running times for the program with various numbers of ONTs and OLTs. Results were obtained
using an Intel® Core2E Duo 2,33 GHz processor with 2 GB of memory.
19
Table 2.2 - Running times [hh:mm:ss] for varying ONT and splitter numbers.
ONTs
Splitters
64 128 256 500 1 000
2 00:00:00 00:00:00
4 00:00:00 00:00:00 00:00:00
10 00:00:00 00:00:00 00:00:01 00:00:01
20 00:00:04 00:00:25 00:00:25 00:02:28 00:00:09
30 00:01:02 00:05:29 00:29:52 01:27:58 00:32:55
50 00:15:35 05:11:00 15:25:36 96:25:30 > 120 hours
- Exceeds maximum capacity of the splitters in the scenario (for GPON).
As expected, the complexity increases exponentially with the increase in the number of variables. For
1 000 ONTs and 50 splitter locations running time was not measurable. However, most medium-sized
scenarios are solved in reasonable times, which encouraged the development of new strategies to
improve the performance and accuracy of the model.
One thing that captures the attention in Table 2.2 is the strong decrease in running time when going
from the scenario with 20 splitters and 500 ONTs to the one with 20 splitters and 1 000 ONTs. The same
happens for the 30 splitter case with 500 and 1 000 ONTs, respectively. With a solid increase in the
number of variables, the running time was actually quite lower. To ensure this was not caused by the
randomness of the simulated scenarios, another set of tests was devised. Several scenarios in the same
conditions as before were created, but this time the number of variables was kept constant, and only the
proportion between splitters and ONTs was modified. This proportion was termed the Occupancy Ratio,
meaning the percentage of ONTs in the scenario relative to the maximum allowed capacity by all the
splitters combined (64 times the number of splitters for GPON). Table 2.3 shows the running times for
different Occupancy Ratios with three different numbers of variables. The proportions between ONTs and
splitter locations were the ones that provided the exact number of variables used.
20
Table 2.3 - Comparison of running times with different Occupancy Ratios.
Number of variables Number of splitters Number of ONTs Occupancy Ratio Running time [s]
1 000
8 24 24% 0,08
10 99 15% 0,12
20 49 4% 1,36
25 39 2% 2,37
5 000
10 499 78% 0,60
20 249 19% 16,06
25 199 12% 16,19
40 124 5% 68,53
10 000
16 624 61% 4,39
20 499 39% 14,68
25 399 25% 23,08
40 249 10% 652,26
The trend that was suggested in Table 2.2 is now confirmed. For the same number of variables, the
running time is invariably higher for lower Occupancy Ratios. This means that adding ONTs to a scenario
can actually be beneficial to the running time of the program. Intuitively, this might be explained by the
fact that a scenario with a low Occupancy Ratio probably has more feasible solutions with smaller
differences in their respective overall costs. On the other hand, in a scenario with just enough capacity for
all ONTs it is more likely that feasible solutions are in general much less attractive than the optimal one.
This makes sense since the algorithm for ILP solving essentially tries to avoid examining all possible
solutions by discarding the ones that are clearly worse than the best one found yet. In a scenario with a
lot of splitters, there are more slight variations in allocations that can produce solutions very close to the
optimal, which forces the procedure to perform a more exhaustive search.
2.3 ILP Model 2 – Updated Formulation
So far, the model presented has stuck to the original CLP formulation, accounting only for OPEX
costs related to PONs. The topology used was not verified as to whether or not it mimics real
deployments. The previous section only introduced the original problem and its size limitations. In this
section a review of actual PON planning is made, and the model is updated to reflect reality to the best
extent of its capabilities.
PONs became a popular solution among operators because they are seen as the least costly
architecture for delivering FTTH in a mass market residential scenario. As one would expect, the initial
developments were set in locations that maximize economies of scale, namely urban centres with high
21
population density. The objectives of PON deployments are usually measured in HouseHolds Passed
(HHP). In this context, a house is deemed as “passed”, when the distribution fibre reaches a Network
Access Point (NAP) which, in urban settings, is usually placed inside buildings. The number of fibres that
feed a given building is usually a function of the number of dwelling units in that building as well as of the
Take Rate considered by each operator. The Take Rate is the predicted maximum percentage of users
that will request the fibre service from the operator. Naturally this varies between operators and the type
of areas served.
In the Portuguese case, according to information from the operators themselves, each service area is
decomposed into cells of approximately 2 000 ONTs which on average, for the city of Lisbon is the
equivalent of about 200 buildings. In these urban settings, as it was mentioned earlier, the infrastructure
for fibre passage already exists. The prohibitive costs of new digs force the reuse of these installations,
even if it implies renting another operator’s conduits, usually the incumbent. The feeder fibres, between
the CO and the splitters, overwhelmingly use existing ducts, while the distribution fibres, between splitters
and buildings, depend on the specifics of the topology, reusing ducts when possible or else laying the
fibre through the buildings’ facades.
Regarding the architecture of the network, two main topologies exist: centralized and distributed split
[23][24][25]. Both are exemplified in Figure 2.4, with the top design pertaining to a centralized split and
the two others to a distributed split.
Figure 2.4 - Centralized and distributed division (Source: Corning).
In both approaches there is an initial splitting stage located at the CO. This configuration allows for
easy access to connections and enables more flexibility in managing the connections to the OLT ports. In
the centralized split, the feeder fibre connects to a Local Convergence Point (LCP), which basically
houses an array of splitters. The distribution fibre then runs all the way to the NAP and from there, if
service is requested, to the users’ premises (the drop cables). In a distributed split, the LCP splitters
connect to another stage of splitters in the NAP. From a fibre-usage point of view, the distributed split
makes the most sense because it saves on distribution fibre with optical splitting in the building’s
22
premises. However, it also means more complex management because the maintenance points are more
scattered and also because when troubleshooting, an Optical Time-Domain Reflectometre (OTDR)
cannot “see” beyond a splitter, which is aggravated when using three splitting stages. Also, a distributed
architecture is less flexible because it allocates splitters to small service areas while a centralized split is
more favourable to future upgrades in the network.
When deploying a residential network, it is not expected that all customers will immediately require
the service. The most likely scenario is an early adoption by a few customers and then phased growth.
From an operator’s point of view, this has to impact the way the connections in the PON are made.
Specifically, the allocation of fibre connections to the splitters in the LCP must take this into account. Let’s
take the example depicted in Figure 2.5, with an LCP housing 2 splitters of 1:32 which belong to different
OLT ports, termed PON A and PON B. Each splitter feeds two buildings with 16 fibres each.
Figure 2.5 - Concentrated allocation.
Now let us suppose that after the network is deployed and connected in this fashion, 2 users on each
building request service. With the concentrated allocation of a building’s connections to just one splitter,
the operator is forced to operate and maintain two PONs to serve 8 customers in this area. With a larger
example involving more splitters, many PONs could be in use to serve only a very limited number of
users. A more reasonable approach, known as balanced allocation is shown in Figure 2.6, where the
splitters now feed every building with 4 fibres each.
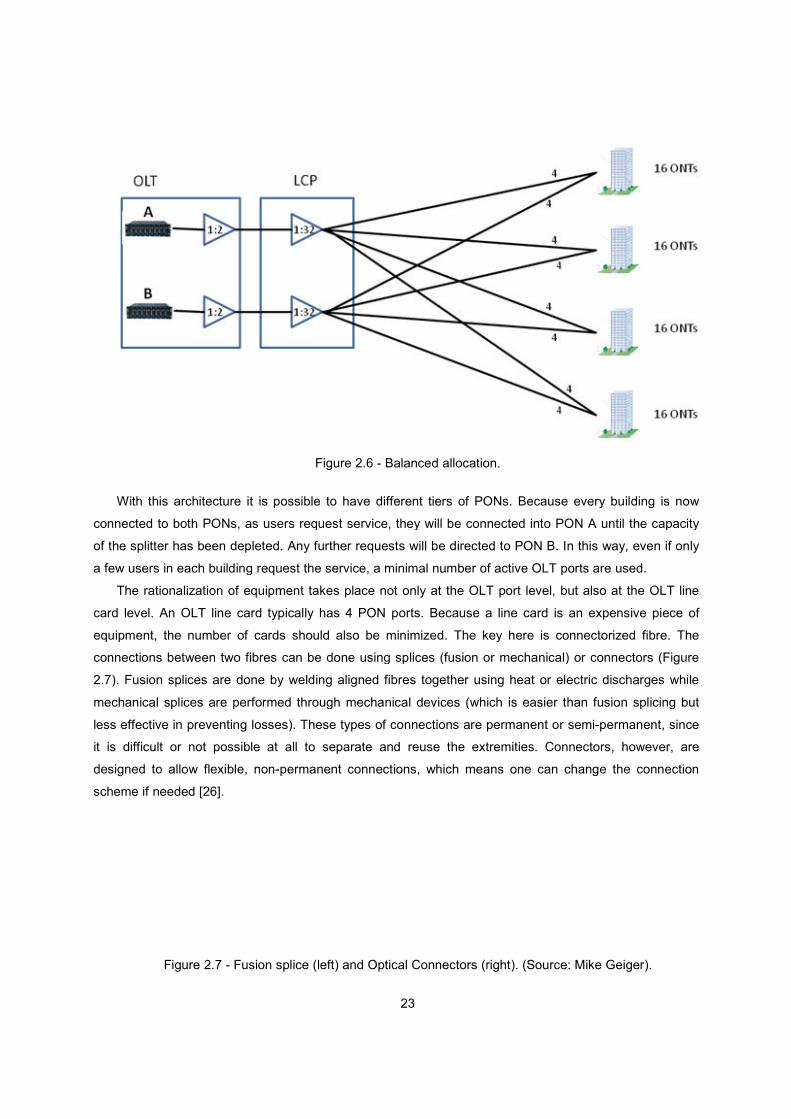
With this architecture it is possible to
connected to both PONs, as users request service, they will be connected into PON A until the capacity
of the splitter has been depleted. Any further requests will be directed to PON B.
a few users in each building request the service, a minima
The rationalization of equipment takes place not only at the OLT port level, but also at the OLT line
card level. An OLT line card typically h
equipment, the number of cards should also be minimized. The key here is connectorized fibre. The
connections between two fibres can be done using splices (fusion or mechanical) or connectors (
2.7). Fusion splices are done by welding aligned fibres together using heat or electric discharges while
mechanical splices are performed through mechanical devi
less effective in preventing losses). These types of connections are permanent or semi
it is difficult or not possible at all to separate and reuse the extremities. Connectors, however, are
designed to allow flexible, non-permanent connections, which means one can change the connection
scheme if needed [26].
Figure 2.7 - Fusion splice (left) and Optical Connectors (right). (Source: Mike Geiger).
23
Figure 2.6 - Balanced allocation.
With this architecture it is possible to have different tiers of PONs. Because every building is now
connected to both PONs, as users request service, they will be connected into PON A until the capacity
of the splitter has been depleted. Any further requests will be directed to PON B.
a few users in each building request the service, a minimal number of active OLT ports are
The rationalization of equipment takes place not only at the OLT port level, but also at the OLT line
card level. An OLT line card typically has 4 PON ports. Because a line card is an expensive piece of
equipment, the number of cards should also be minimized. The key here is connectorized fibre. The
connections between two fibres can be done using splices (fusion or mechanical) or connectors (
). Fusion splices are done by welding aligned fibres together using heat or electric discharges while
mechanical splices are performed through mechanical devices (which is easier than fusion splicing but
less effective in preventing losses). These types of connections are permanent or semi
it is difficult or not possible at all to separate and reuse the extremities. Connectors, however, are
permanent connections, which means one can change the connection
Fusion splice (left) and Optical Connectors (right). (Source: Mike Geiger).
have different tiers of PONs. Because every building is now
connected to both PONs, as users request service, they will be connected into PON A until the capacity
of the splitter has been depleted. Any further requests will be directed to PON B. In this way, even if only
l number of active OLT ports are used.
The rationalization of equipment takes place not only at the OLT port level, but also at the OLT line
as 4 PON ports. Because a line card is an expensive piece of
equipment, the number of cards should also be minimized. The key here is connectorized fibre. The
connections between two fibres can be done using splices (fusion or mechanical) or connectors (Figure
). Fusion splices are done by welding aligned fibres together using heat or electric discharges while
ces (which is easier than fusion splicing but
less effective in preventing losses). These types of connections are permanent or semi-permanent, since
it is difficult or not possible at all to separate and reuse the extremities. Connectors, however, are
permanent connections, which means one can change the connection
Fusion splice (left) and Optical Connectors (right). (Source: Mike Geiger).
24
This is especially useful for the mentioned purpose of line card optimization. The connections from
the OLT to the first stage of splitters located at the CO are connectorized. In this way, the connections
from first stage splitters that serve used PONs can be directed to the same line cards, allowing operators
to use the least possible amount of cards. If applied to the entire network, connectorized solutions would
allow total flexibility, since the connections could always be rearranged as to minimize the total number of
active PONs. However some practical factors negate the advantages of this solution. Aside from the fact
that connectors are more expensive than splicing, the attenuation of a connector is much higher than that
of a fusion splice (0.3 dB vs. 0.05 dB was considered in this work). Furthermore, when the LCP is located
in the ducts (in which case it is usually called a Junction Box), there might not exist enough space for
connectorized links nor is the access to these Boxes easy enough to perform rearrangements on a
regular basis. Furthermore, access to the ducts is often conditioned, especially for operators renting
them, so connectorization in the outside plant is not so popular.
Finally, the nature of the LCP should be mentioned. The most popular solution in Portugal is the use
of Junction Boxes, which are basically derivations in the main feeder fibre cables that house arrays of
splitters to serve more specific areas. Another alternative are Local Convergence Cabinets (LCC), which
are outdoor cabinets that are naturally more expensive, but allow for easy access and extended capacity
for splitters and connectorized links. However, aside from the costs of the cabinets themselves, operators
are subjected to municipal licenses to install them which further increases costs and makes this solution
less viable.
2.3.1 Splitter Co-Location
Based on the previous discussion, it is clear the model presented in 2.2 does not accurately reflect
some aspects of actual PON configurations. One such example is the fact that it allows only one splitter
per location which is rarely the case. This also causes the scenarios to become too large and consume
too much memory just to be able to have enough splitters to accommodate all the ONTs. One option for
introducing this aspect would be to set the capacities � as multiples of 64 according to the capacity of the
Cabinet or Junction Box. This approach is mentioned in [13]. However, it would violate the spirit of this
formulation, since this wouldn’t account for the fact that these new splitters mean new PONs with extra
OPEX. The solution to this problem was to have the variables � reflect the number of splitters that the
locations house. This can be accomplished by setting � to integer instead of just binary, this is
accomplished. The model remains unchanged except for adding the following constraint:
� � F (2.10)
which basically sets the maximum amount of splitters that location � can accommodate to F.
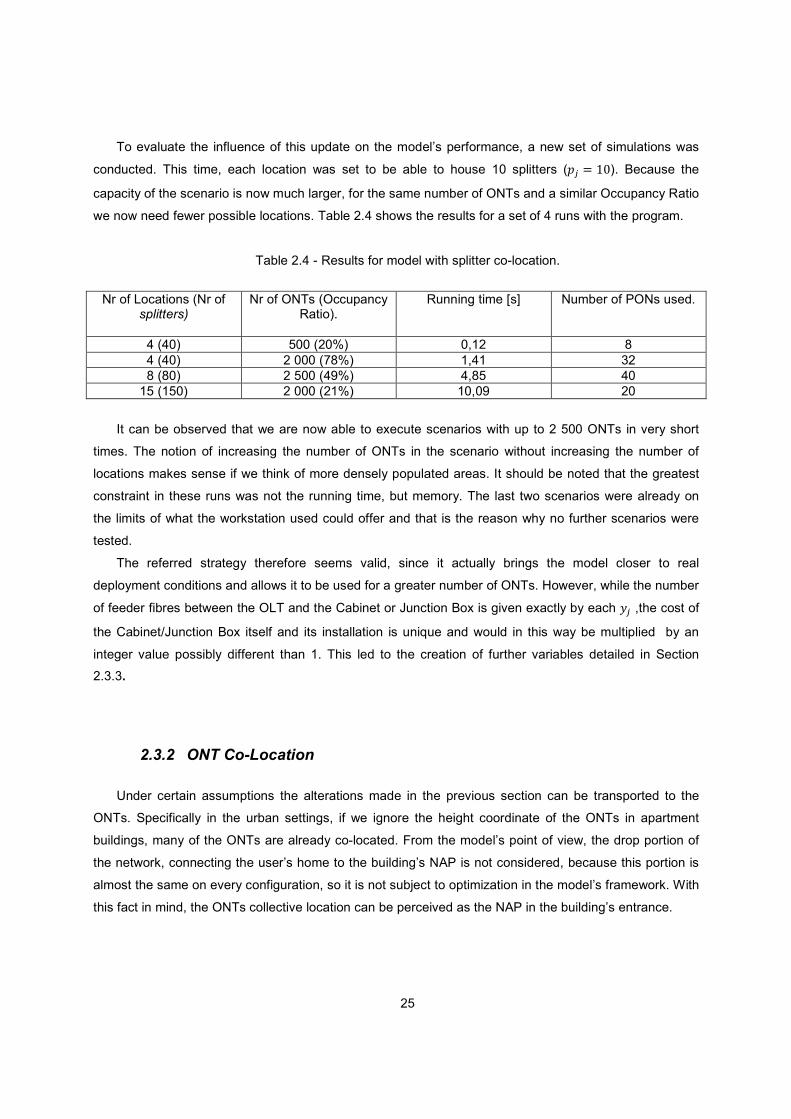
25
To evaluate the influence of this update on the model’s performance, a new set of simulations was
conducted. This time, each location was set to be able to house 10 splitters (F � �.). Because the
capacity of the scenario is now much larger, for the same number of ONTs and a similar Occupancy Ratio
we now need fewer possible locations. Table 2.4 shows the results for a set of 4 runs with the program.
Table 2.4 - Results for model with splitter co-location.
Nr of Locations (Nr of splitters)
Nr of ONTs (Occupancy Ratio).
Running time [s] Number of PONs used.
4 (40) 500 (20%) 0,12 8 4 (40) 2 000 (78%) 1,41 32 8 (80) 2 500 (49%) 4,85 40
15 (150) 2 000 (21%) 10,09 20
It can be observed that we are now able to execute scenarios with up to 2 500 ONTs in very short
times. The notion of increasing the number of ONTs in the scenario without increasing the number of
locations makes sense if we think of more densely populated areas. It should be noted that the greatest
constraint in these runs was not the running time, but memory. The last two scenarios were already on
the limits of what the workstation used could offer and that is the reason why no further scenarios were
tested.
The referred strategy therefore seems valid, since it actually brings the model closer to real
deployment conditions and allows it to be used for a greater number of ONTs. However, while the number
of feeder fibres between the OLT and the Cabinet or Junction Box is given exactly by each � ,the cost of
the Cabinet/Junction Box itself and its installation is unique and would in this way be multiplied by an
integer value possibly different than 1. This led to the creation of further variables detailed in Section
2.3.3.
2.3.2 ONT Co-Location
Under certain assumptions the alterations made in the previous section can be transported to the
ONTs. Specifically in the urban settings, if we ignore the height coordinate of the ONTs in apartment
buildings, many of the ONTs are already co-located. From the model’s point of view, the drop portion of
the network, connecting the user’s home to the building’s NAP is not considered, because this portion is
almost the same on every configuration, so it is not subject to optimization in the model’s framework. With
this fact in mind, the ONTs collective location can be perceived as the NAP in the building’s entrance.
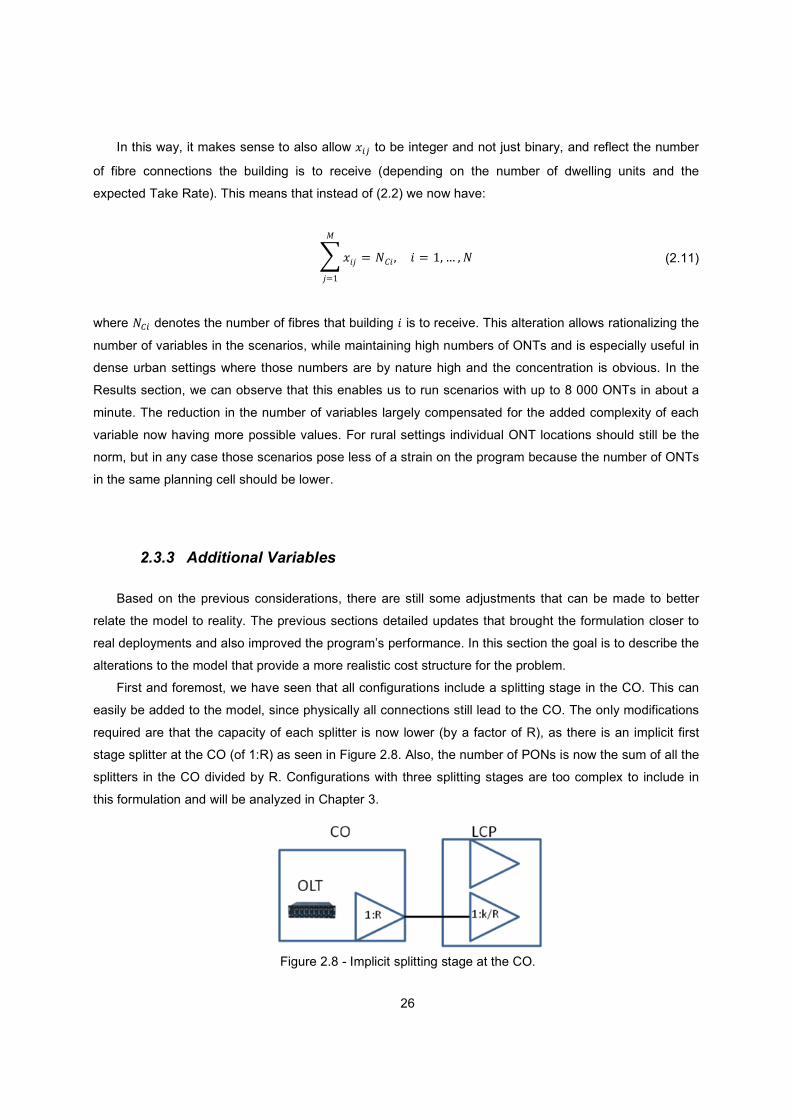
26
In this way, it makes sense to also allow � to be integer and not just binary, and reflect the number
of fibre connections the building is to receive (depending on the number of dwelling units and the
expected Take Rate). This means that instead of (2.2) we now have:
� ��� � �9� ������� � �� � � ��
��� (2.11)
where �G denotes the number of fibres that building � is to receive. This alteration allows rationalizing the
number of variables in the scenarios, while maintaining high numbers of ONTs and is especially useful in
dense urban settings where those numbers are by nature high and the concentration is obvious. In the
Results section, we can observe that this enables us to run scenarios with up to 8 000 ONTs in about a
minute. The reduction in the number of variables largely compensated for the added complexity of each
variable now having more possible values. For rural settings individual ONT locations should still be the
norm, but in any case those scenarios pose less of a strain on the program because the number of ONTs
in the same planning cell should be lower.
2.3.3 Additional Variables
Based on the previous considerations, there are still some adjustments that can be made to better
relate the model to reality. The previous sections detailed updates that brought the formulation closer to
real deployments and also improved the program’s performance. In this section the goal is to describe the
alterations to the model that provide a more realistic cost structure for the problem.
First and foremost, we have seen that all configurations include a splitting stage in the CO. This can
easily be added to the model, since physically all connections still lead to the CO. The only modifications
required are that the capacity of each splitter is now lower (by a factor of R), as there is an implicit first
stage splitter at the CO (of 1:R) as seen in Figure 2.8. Also, the number of PONs is now the sum of all the
splitters in the CO divided by R. Configurations with three splitting stages are too complex to include in
this formulation and will be analyzed in Chapter 3.
Figure 2.8 - Implicit splitting stage at the CO.

27
As it was mentioned in section 2.3.1, the modification of the variables that signal a connection
between the OLT and the splitters no longer accurately reflects the costs involved. It now accounts for the
number of fibre connections between the OLT and the splitter array. But there is only one Cabinet or
Junction Box, and its cost is now multiplied by an integer probably larger than one. While some
approximation could be employed here, it is clear the problem needs more granularity in this respect.
Furthermore, the OPEX optimization takes place on the OLT port level. It has been mentioned that line
card optimization is also important. With this in mind, some variables were added to the model to reflect
these issues. They are described as follows:
• A variable to address the number of line cards at the OLT, �:;<, which is basically the
rounding up of the quotient between the number of PONs, �H:� and the number of PONs per
card, �HG (usually 4).
• Variables that reflect the cost of the Cabinets or Junction Boxes, I. These are binary
variables, since they only indicate the existence of the concentration points..
The revised formulation, termed ILP Model 2, is now formally stated as:
����JKL��MJN�O�P�Q�:;< ? 9:;< ��H:� ? 9H:� ����� �� �� ��
��
�
��
�
����!I
�
�� (2.12)
Subject to:
�� � �G ������� � ��� � ��
������ (2.13)
�� � �R ��
��������� � ��� ������ (2.14)
� � F (2.15)
�H:� S T ����R (2.16)
�:;< S �H:�R (2.17)
I � � ������� � ��� ��� (2.18)
I S �F ������� � ��� ��� (2.19)
9:;< is now the cost of a line card and the OPEX associated with it. 9H:� is the cost associated with
operating a single PON port within a line card and the cost of the first splitter in the CO. The variables ! denote the costs of the Cabinets or Junction Boxes and of installing fibre between the OLT and splitter
location �.

28
Constraint (2.13) was already introduced in (2.11). Constraint (2.14) ensures the connections to � do
not exceed the capacity of the array of splitters placed there, and that capacity is set by (2.15) where F is
the maximum number of splitters supported at location �. Constraint (2.16) sets the correct number of line
cards, while constraint (2.17) says that the number of PONs is the total sum of second-stage splitters in
the network divided by the ratio of those splitters (since the variable is integer the inequality ensures the
result from the division is rounded up). Constraint (2.18) forces I to zero if � is zero (i.e. there are no
splitters at �). Finally, constraint (2.19) acts as a way to make sure I is above zero if � also is, but
divided by 9P so I � � in any circunstance. Otherwise, the problem would not be feasible.
The concentration of ONTs was described in the same way as the concentration of splitters was.
However, while in the splitter case we added an extra set of binary variables that reflect the existence of a
single Cabinet/Junction Box between the OLT and the splitters, this was not the case for the ONTs. A
similar strategy could be employed, by creating another set of binary variables that were equal to 1
whenever the corresponding � U .. However this would imply creating an additional � ? � variables
which burdened the problem with too much complexity, rendering it unable to solve even medium sized
scenarios. Under our assumptions, though, the cost of laying fibre is proportional to the number of fibres
themselves, since most of the time spent in labour is splicing, conditioning and testing fibres. The element
we are discarding here is the cost of the NAP, which is usually a small box inside the building where all
the fibre connections are available to make the drop connections when required. Since there is only one
per building in any case, it did not seem logical to needlessly add complexity to the program just to reflect
the cost differences in installing bigger or smaller NAPs.
The results for this model show that, for scenarios with concentrated ONTs (dense urban), networks
below 10 000 ONTs and 40 possible Junction Boxes are optimized in less than 4 hours.
2.4 Heuristic Methods
Heuristics can be described as the use of available information through intuitive empirical rules to
quickly achieve solutions as close as possible to the optimum [27]. For the problem in question, where the
running times to attain optimal solutions can exceed dozens of hours for large scenarios, these methods
are of great importance. They should provide solutions relatively close to the optimal one given by the
ILP, bypassing its inherent complexity.
The methods used here preserve the core of the problem’s original formulation. This means they are
based on partitions or relaxations of the original problem with heuristic decision processes in between
iterations. This option has two main drivers: to maximize the reuse of the work performed with the ILP
formulation and to allow modifications to the model such as the ones described above more easily
translate into the heuristics. The following sections present the two methods proposed.
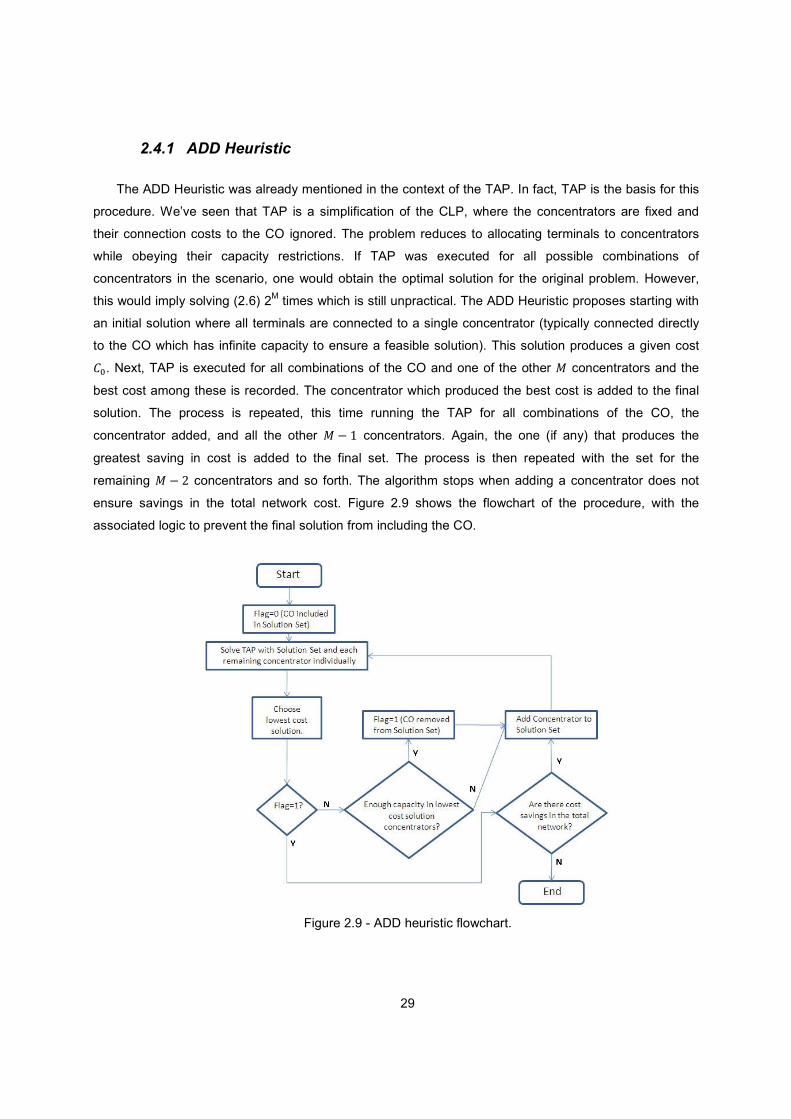
29
2.4.1 ADD Heuristic
The ADD Heuristic was already mentioned in the context of the TAP. In fact, TAP is the basis for this
procedure. We’ve seen that TAP is a simplification of the CLP, where the concentrators are fixed and
their connection costs to the CO ignored. The problem reduces to allocating terminals to concentrators
while obeying their capacity restrictions. If TAP was executed for all possible combinations of
concentrators in the scenario, one would obtain the optimal solution for the original problem. However,
this would imply solving (2.6) 2M times which is still unpractical. The ADD Heuristic proposes starting with
an initial solution where all terminals are connected to a single concentrator (typically connected directly
to the CO which has infinite capacity to ensure a feasible solution). This solution produces a given cost
9�. Next, TAP is executed for all combinations of the CO and one of the other � concentrators and the
best cost among these is recorded. The concentrator which produced the best cost is added to the final
solution. The process is repeated, this time running the TAP for all combinations of the CO, the
concentrator added, and all the other � V � concentrators. Again, the one (if any) that produces the
greatest saving in cost is added to the final set. The process is then repeated with the set for the
remaining � V W concentrators and so forth. The algorithm stops when adding a concentrator does not
ensure savings in the total network cost. Figure 2.9 shows the flowchart of the procedure, with the
associated logic to prevent the final solution from including the CO.
Figure 2.9 - ADD heuristic flowchart.
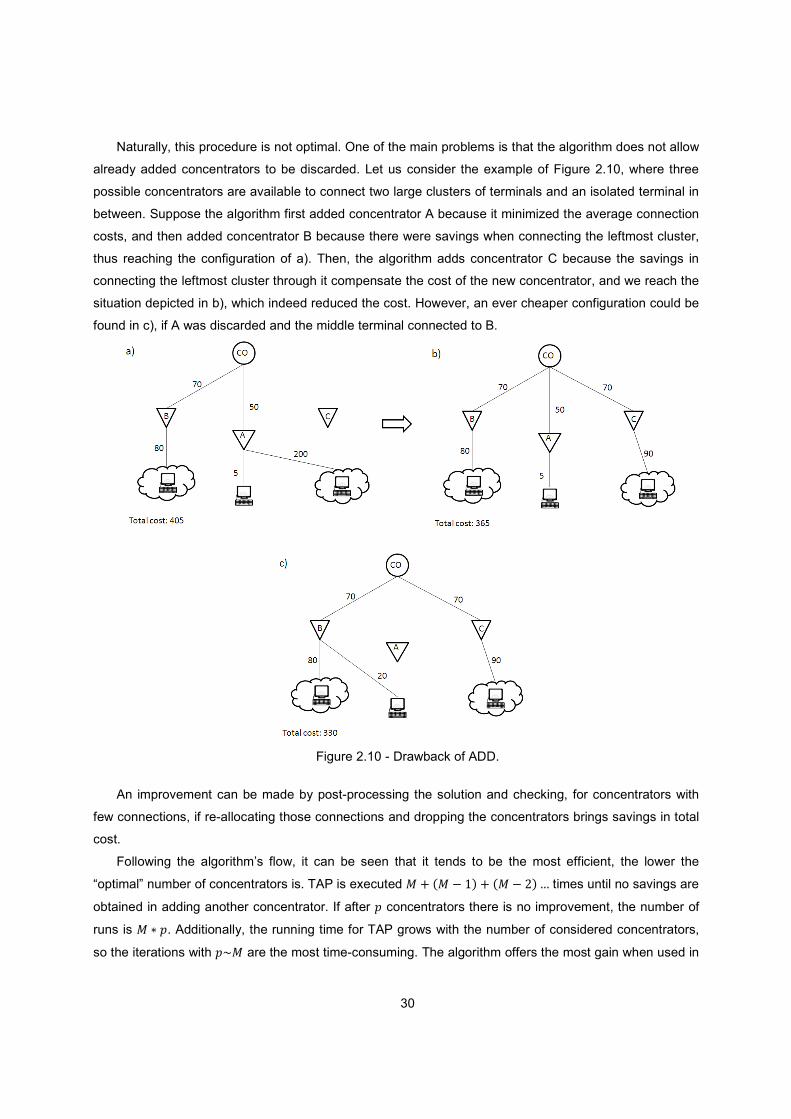
30
Naturally, this procedure is not optimal. One of the main problems is that the algorithm does not allow
already added concentrators to be discarded. Let us consider the example of Figure 2.10, where three
possible concentrators are available to connect two large clusters of terminals and an isolated terminal in
between. Suppose the algorithm first added concentrator A because it minimized the average connection
costs, and then added concentrator B because there were savings when connecting the leftmost cluster,
thus reaching the configuration of a). Then, the algorithm adds concentrator C because the savings in
connecting the leftmost cluster through it compensate the cost of the new concentrator, and we reach the
situation depicted in b), which indeed reduced the cost. However, an ever cheaper configuration could be
found in c), if A was discarded and the middle terminal connected to B.
Figure 2.10 - Drawback of ADD.
An improvement can be made by post-processing the solution and checking, for concentrators with
few connections, if re-allocating those connections and dropping the concentrators brings savings in total
cost.
Following the algorithm’s flow, it can be seen that it tends to be the most efficient, the lower the
“optimal” number of concentrators is. TAP is executed � � D� V �B � D� V WB� times until no savings are
obtained in adding another concentrator. If after F concentrators there is no improvement, the number of
runs is � ? F. Additionally, the running time for TAP grows with the number of considered concentrators,
so the iterations with FX� are the most time-consuming. The algorithm offers the most gain when used in
31
a scenario with a large number of possible locations for concentrators (a problem that is very hard to
solve for the ILP) but where the best solutions use a low number of concentrators (F Y �). As we will see
next, the number of PONs is usually minimized to the least possible given the number of ONTs.
Therefore, it is possible to have a good idea of the optimal number of concentrators beforehand and
understand where ADD is most useful.
If, on the other hand, the costs are link-dominated, meaning the program tends to minimize the fibre
regardless of the number of PONs, a complementary strategy named DROP can be used. DROP
progressively releases concentrators after starting with an initial solution with all concentrators in use.
When the release of a concentrator offers no more savings, the procedure stops. This is obviously most
useful in the opposite scenarios to the described above, where the optimal number of concentrators is
thought to be close to the total number of locations considered.
2.4.2 LP Relaxation
A common method for achieving good sub-optimal results in problems where the ILP model is too
complex is the so called LP Relaxation. The method consists in taking advantage of the fact that the LP
solution (with real variables) of the corresponding problem is obtained much more quickly than in the ILP
case [28]. In fact, the Branch & Bound procedure used by many ILP solvers is based on successively
solving the LP model with some set of fixed variables. The LP solution acts as a lower bound for all the
feasible solutions in the solution tree originated by fixing a particular set of variables. If that bound is
higher than an already found solution, the whole tree can be discarded and depth search into it can be
avoided.
The intuition behind this method lies on the notion that the LP solution has a fair probability of being
close to the ILP solution, at least in certain aspects. This has particular application in binary-variable
problems such as the one developed here, where variables denote the existence of certain parameters.
As an example, in our model, let’s assume the LP solution says that a given � � .�Z while �[ � .��. In
abstract terms, this can be interpreted as � more likely “belonging” to � than it does to �. Then it makes
sense to re-solve the LP this time forcing � � �, by setting that equality as a restriction in the problem.
This is the basis of this procedure. Initially for our case, variables closer to the unit in each iteration were
set to 1 in the next one. The procedure stops when a feasible integer solution was found by the LP model.
The method can be modified to allow the alterations made to the original problem. Specifically, when
considering splitter or ONT co-location, the variables � �� � cease to be just binary. The obvious
modification is to fix in each run the variable that yields the least error when rounding up to the nearest
integer. It should be noted that rounding down was not considered at first when the variables were
between 0 and 1. This was because setting variables to zero often led to making the problem unfeasible
in the following iterations (most of the time by not having enough remaining splitter capacity in the
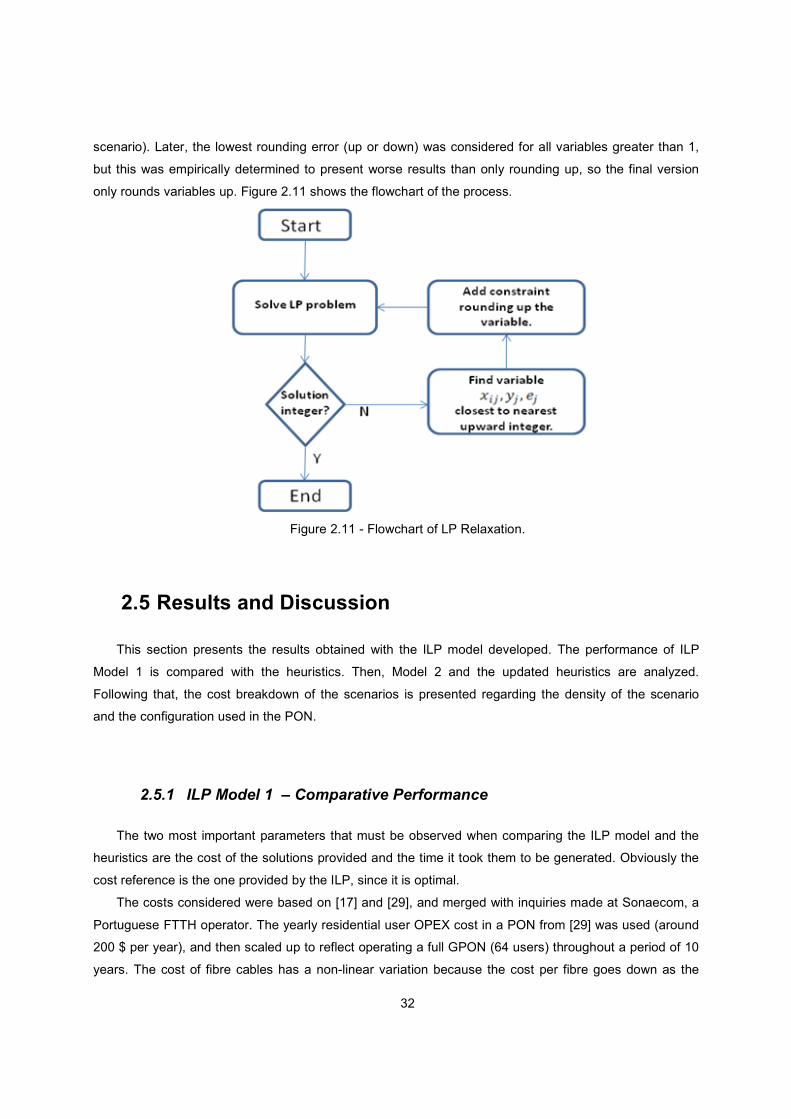
32
scenario). Later, the lowest rounding error (up or down) was considered for all variables greater than 1,
but this was empirically determined to present worse results than only rounding up, so the final version
only rounds variables up. Figure 2.11 shows the flowchart of the process.
Figure 2.11 - Flowchart of LP Relaxation.
2.5 Results and Discussion
This section presents the results obtained with the ILP model developed. The performance of ILP
Model 1 is compared with the heuristics. Then, Model 2 and the updated heuristics are analyzed.
Following that, the cost breakdown of the scenarios is presented regarding the density of the scenario
and the configuration used in the PON.
2.5.1 ILP Model 1 – Comparative Performance
The two most important parameters that must be observed when comparing the ILP model and the
heuristics are the cost of the solutions provided and the time it took them to be generated. Obviously the
cost reference is the one provided by the ILP, since it is optimal.
The costs considered were based on [17] and [29], and merged with inquiries made at Sonaecom, a
Portuguese FTTH operator. The yearly residential user OPEX cost in a PON from [29] was used (around
200 $ per year), and then scaled up to reflect operating a full GPON (64 users) throughout a period of 10
years. The cost of fibre cables has a non-linear variation because the cost per fibre goes down as the
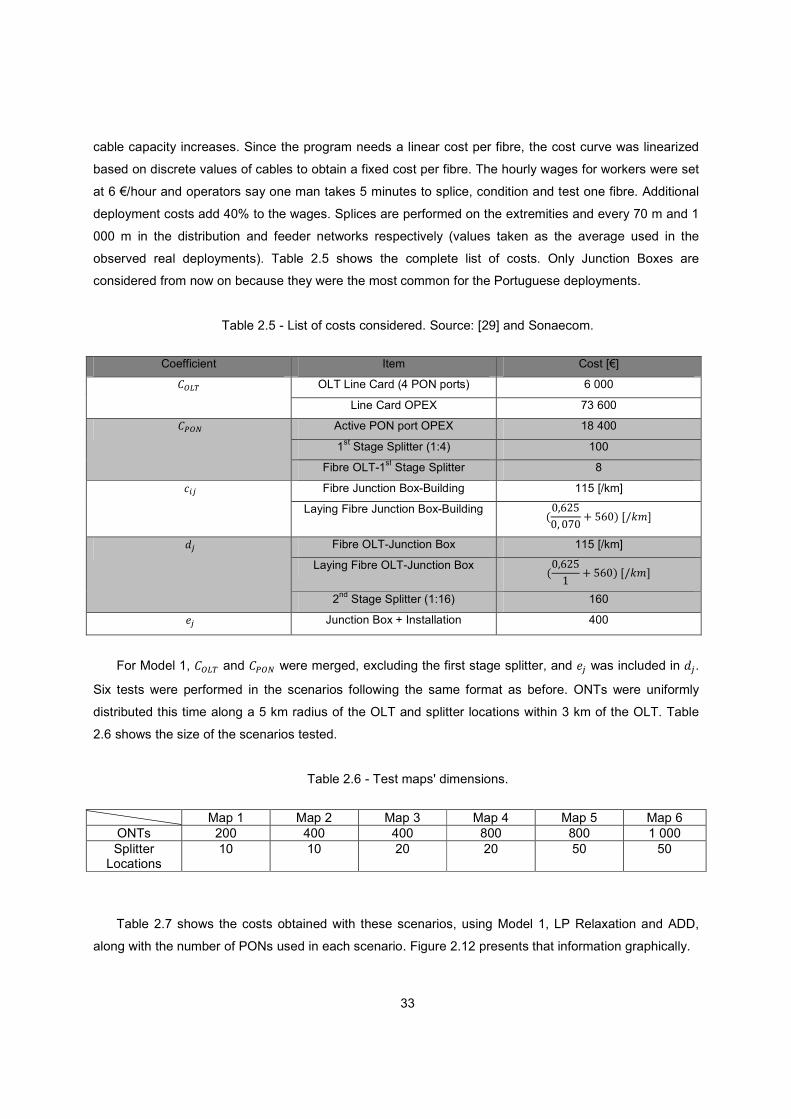
33
cable capacity increases. Since the program needs a linear cost per fibre, the cost curve was linearized
based on discrete values of cables to obtain a fixed cost per fibre. The hourly wages for workers were set
at 6 €/hour and operators say one man takes 5 minutes to splice, condition and test one fibre. Additional
deployment costs add 40% to the wages. Splices are performed on the extremities and every 70 m and 1
000 m in the distribution and feeder networks respectively (values taken as the average used in the
observed real deployments). Table 2.5 shows the complete list of costs. Only Junction Boxes are
considered from now on because they were the most common for the Portuguese deployments.
Table 2.5 - List of costs considered. Source: [29] and Sonaecom.
Coefficient Item Cost [€]
9:;< OLT Line Card (4 PON ports) 6 000
Line Card OPEX 73 600
�9H:� Active PON port OPEX 18 400
1st Stage Splitter (1:4) 100
Fibre OLT-1st Stage Splitter 8
� Fibre Junction Box-Building 115 [/km]
Laying Fibre Junction Box-Building D.�\W].� .^. � ]\.B�_`�&a Fibre OLT-Junction Box 115 [/km]
Laying Fibre OLT-Junction Box D.�\W]� � ]\.B�_`�&a 2nd Stage Splitter (1:16) 160
! Junction Box + Installation 400
For Model 1, 9:;< and 9H:� were merged, excluding the first stage splitter, and ! was included in . Six tests were performed in the scenarios following the same format as before. ONTs were uniformly
distributed this time along a 5 km radius of the OLT and splitter locations within 3 km of the OLT. Table
2.6 shows the size of the scenarios tested.
Table 2.6 - Test maps' dimensions.
Map 1 Map 2 Map 3 Map 4 Map 5 Map 6 ONTs 200 400 400 800 800 1 000 Splitter
Locations 10 10 20 20 50 50
Table 2.7 shows the costs obtained with these scenarios, using Model 1, LP Relaxation and ADD,
along with the number of PONs used in each scenario. Figure 2.12 presents that information graphically.
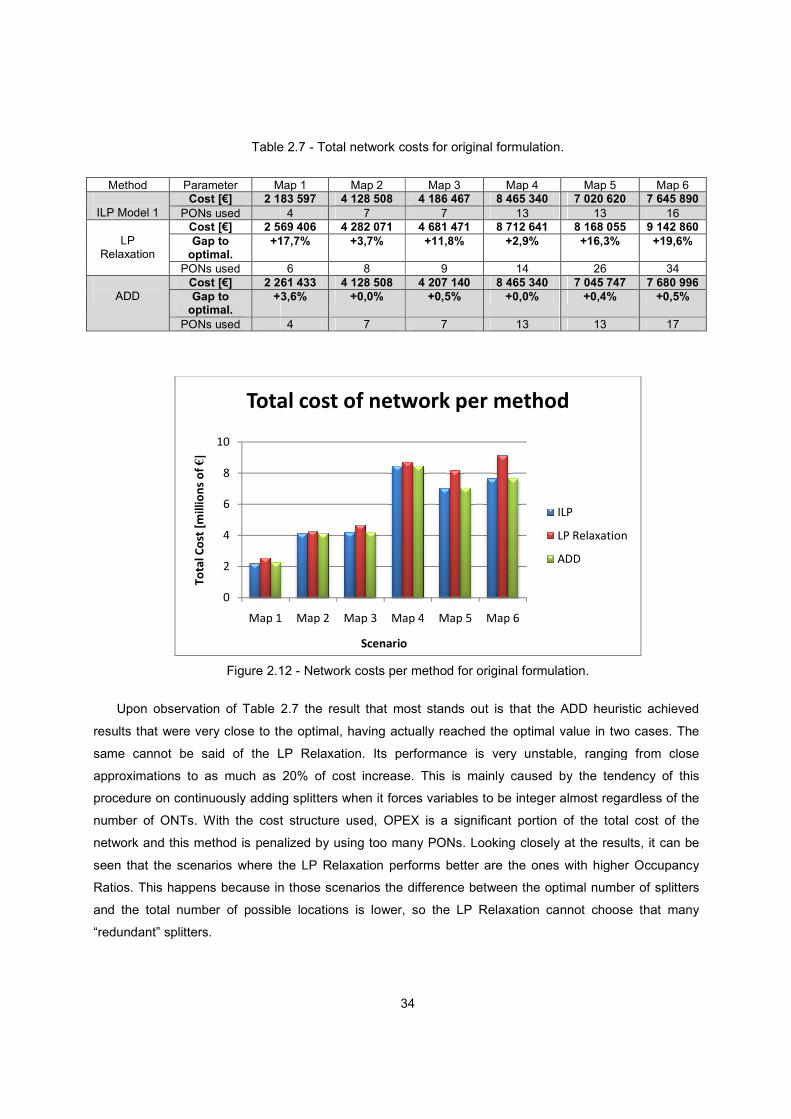
Table
Method Parameter Map 1
ILP Model 1 Cost [€] 2 183 597
PONs used
LP Relaxation
Cost [€] 2 569 406
Gap to optimal.
+17,7%
PONs used
ADD Cost [€] 2 261 433
Gap to optimal.
+3,6%
PONs used
Figure 2.12
Upon observation of Table
results that were very close to the optimal, having actually reached the optimal value in two cases. The
same cannot be said of the LP Relaxation. Its performance is very unstable, ranging from close
approximations to as much as 20% of cost increase. This is mainly caused
procedure on continuously adding splitters when it forces variables to be integer almost regardless of the
number of ONTs. With the cost structure used, OPEX is a significant portion of the total cost of the
network and this method is penalized by using too many PONs. Looking closely at the results, it can be
seen that the scenarios where the LP Relaxation
Ratios. This happens because in those scenarios the difference between the op
and the total number of possible locations is l
“redundant” splitters.
0
2
4
6
8
10
Map 1
To
tal
Co
st [
mil
lio
ns
of €]
Total cost of network per method
34
Table 2.7 - Total network costs for original formulation.
Map 1 Map 2 Map 3 Map 4 2 183 597 4 128 508 4 186 467 8 465 340
4 7 7 13 2 569 406 4 282 071 4 681 471 8 712 641
17,7% +3,7% +11,8% +2,9%
6 8 9 14 2 261 433 4 128 508 4 207 140 8 465 340
3,6% +0,0% +0,5% +0,0%
4 7 7 13
12 - Network costs per method for original formulation.
Table 2.7 the result that most stands out is that the ADD heuristic achieved
e very close to the optimal, having actually reached the optimal value in two cases. The
same cannot be said of the LP Relaxation. Its performance is very unstable, ranging from close
approximations to as much as 20% of cost increase. This is mainly caused by the tendency of this
procedure on continuously adding splitters when it forces variables to be integer almost regardless of the
number of ONTs. With the cost structure used, OPEX is a significant portion of the total cost of the
is penalized by using too many PONs. Looking closely at the results, it can be
seen that the scenarios where the LP Relaxation performs better are the ones with higher Occupancy
Ratios. This happens because in those scenarios the difference between the optimal number of splitters
and the total number of possible locations is lower, so the LP Relaxation cannot
Map 1 Map 2 Map 3 Map 4 Map 5 Map 6
Scenario
Total cost of network per method
ILP
LP Relaxation
ADD
Total network costs for original formulation.
Map 5 Map 6 7 020 620 7 645 890
13 16 8 168 055 9 142 860
+16,3% +19,6%
26 34 7 045 747 7 680 996
+0,4% +0,5%
13 17
Network costs per method for original formulation.
the result that most stands out is that the ADD heuristic achieved
e very close to the optimal, having actually reached the optimal value in two cases. The
same cannot be said of the LP Relaxation. Its performance is very unstable, ranging from close
by the tendency of this
procedure on continuously adding splitters when it forces variables to be integer almost regardless of the
number of ONTs. With the cost structure used, OPEX is a significant portion of the total cost of the
is penalized by using too many PONs. Looking closely at the results, it can be
better are the ones with higher Occupancy
timal number of splitters
ower, so the LP Relaxation cannot choose that many
Total cost of network per method
ILP
LP Relaxation
ADD
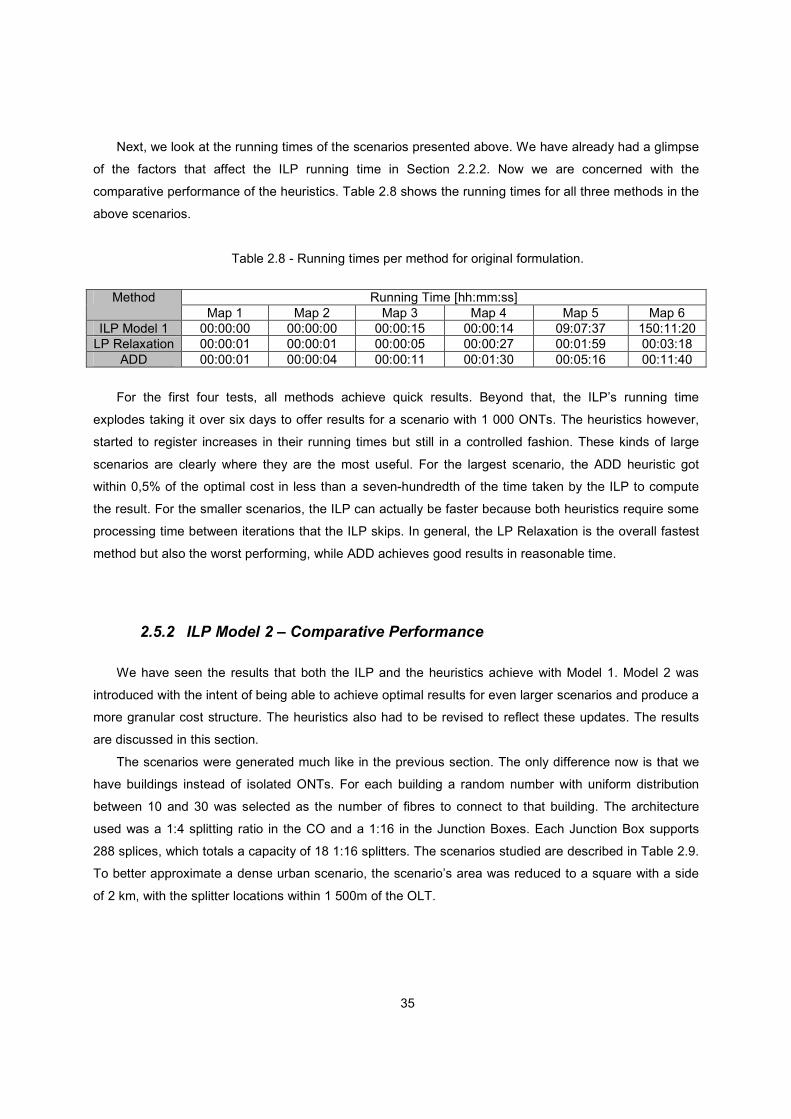
35
Next, we look at the running times of the scenarios presented above. We have already had a glimpse
of the factors that affect the ILP running time in Section 2.2.2. Now we are concerned with the
comparative performance of the heuristics. Table 2.8 shows the running times for all three methods in the
above scenarios.
Table 2.8 - Running times per method for original formulation.
Method Running Time [hh:mm:ss] Map 1 Map 2 Map 3 Map 4 Map 5 Map 6
ILP Model 1 00:00:00 00:00:00 00:00:15 00:00:14 09:07:37 150:11:20 LP Relaxation 00:00:01 00:00:01 00:00:05 00:00:27 00:01:59 00:03:18
ADD 00:00:01 00:00:04 00:00:11 00:01:30 00:05:16 00:11:40
For the first four tests, all methods achieve quick results. Beyond that, the ILP’s running time
explodes taking it over six days to offer results for a scenario with 1 000 ONTs. The heuristics however,
started to register increases in their running times but still in a controlled fashion. These kinds of large
scenarios are clearly where they are the most useful. For the largest scenario, the ADD heuristic got
within 0,5% of the optimal cost in less than a seven-hundredth of the time taken by the ILP to compute
the result. For the smaller scenarios, the ILP can actually be faster because both heuristics require some
processing time between iterations that the ILP skips. In general, the LP Relaxation is the overall fastest
method but also the worst performing, while ADD achieves good results in reasonable time.
2.5.2 ILP Model 2 – Comparative Performance
We have seen the results that both the ILP and the heuristics achieve with Model 1. Model 2 was
introduced with the intent of being able to achieve optimal results for even larger scenarios and produce a
more granular cost structure. The heuristics also had to be revised to reflect these updates. The results
are discussed in this section.
The scenarios were generated much like in the previous section. The only difference now is that we
have buildings instead of isolated ONTs. For each building a random number with uniform distribution
between 10 and 30 was selected as the number of fibres to connect to that building. The architecture
used was a 1:4 splitting ratio in the CO and a 1:16 in the Junction Boxes. Each Junction Box supports
288 splices, which totals a capacity of 18 1:16 splitters. The scenarios studied are described in Table 2.9.
To better approximate a dense urban scenario, the scenario’s area was reduced to a square with a side
of 2 km, with the splitter locations within 1 500m of the OLT.
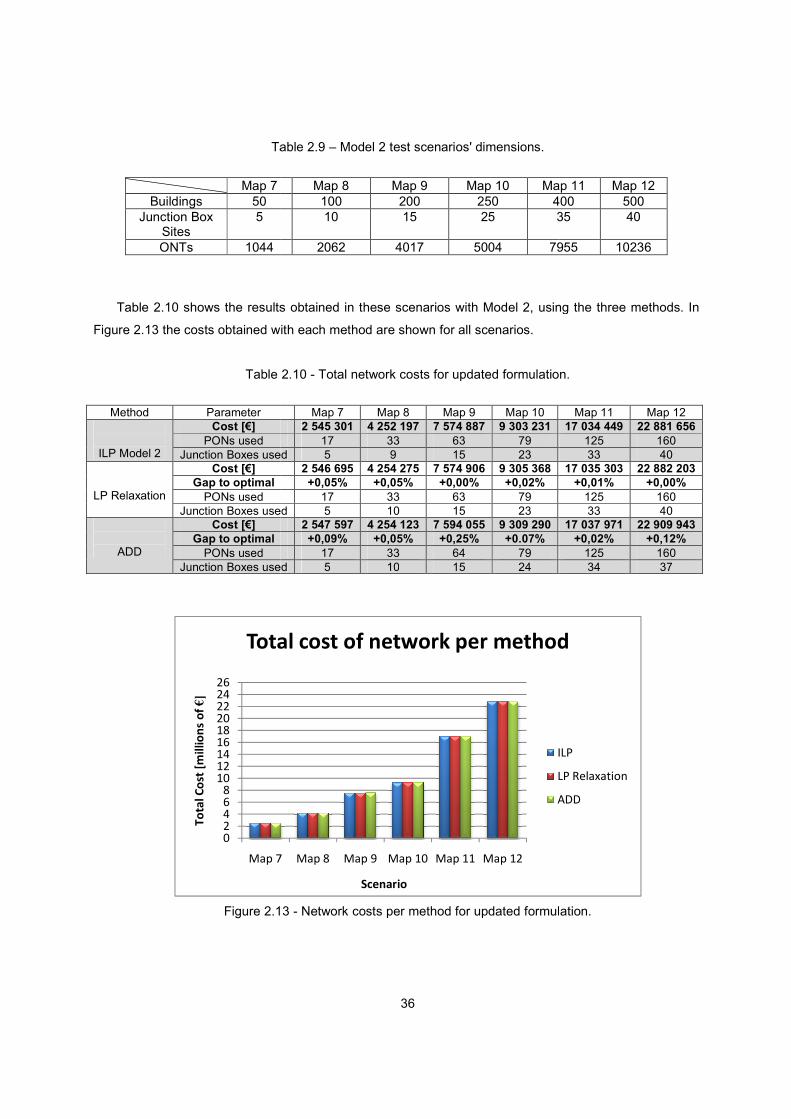
Table
Map 7 Buildings 50
Junction Box Sites
5
ONTs 1044
Table 2.10 shows the results obtained in these scenarios with Model 2, using the three methods. In
Figure 2.13 the costs obtained with each method are shown for all scenarios.
Table
Method Parameter
ILP Model 2
Cost [€]
PONs used Junction Boxes used
LP Relaxation
Cost [€]
Gap to optimal
PONs used Junction Boxes used
ADD
Cost [€]
Gap to optimal
PONs used Junction Boxes used
Figure 2.13
02468
101214161820222426
Map 7
To
tal
Co
st [
mil
lio
ns
of €]
Total cost of network per method
36
Table 2.9 – Model 2 test scenarios' dimensions.
Map 8 Map 9 Map 10 Map 11100 200 250 40010 15 25 35
2062 4017 5004 7955
shows the results obtained in these scenarios with Model 2, using the three methods. In
he costs obtained with each method are shown for all scenarios.
Table 2.10 - Total network costs for updated formulation.
Map 7 Map 8 Map 9 Map 10 2 545 301 4 252 197 7 574 887 9 303 231
17 33 63 79 Junction Boxes used 5 9 15 23
2 546 695 4 254 275 7 574 906 9 305 368
+0,05% +0,05% +0,00% +0,02%
17 33 63 79 Junction Boxes used 5 10 15 23
2 547 597 4 254 123 7 594 055 9 309 290
+0,09% +0,05% +0,25% +0.07%
17 33 64 79 Junction Boxes used 5 10 15 24
13 - Network costs per method for updated formulation.
Map 7 Map 8 Map 9 Map 10 Map 11 Map 12
Scenario
Total cost of network per method
ILP
LP Relaxation
ADD
Map 11 Map 12 400 500 35 40
7955 10236
shows the results obtained in these scenarios with Model 2, using the three methods. In
Total network costs for updated formulation.
Map 11 Map 12 17 034 449 22 881 656
125 160 33 40
17 035 303 22 882 203
+0,01% +0,00%
125 160 33 40
17 037 971 22 909 943
+0,02% +0,12%
125 160 34 37
Network costs per method for updated formulation.
Total cost of network per method
ILP
LP Relaxation
ADD
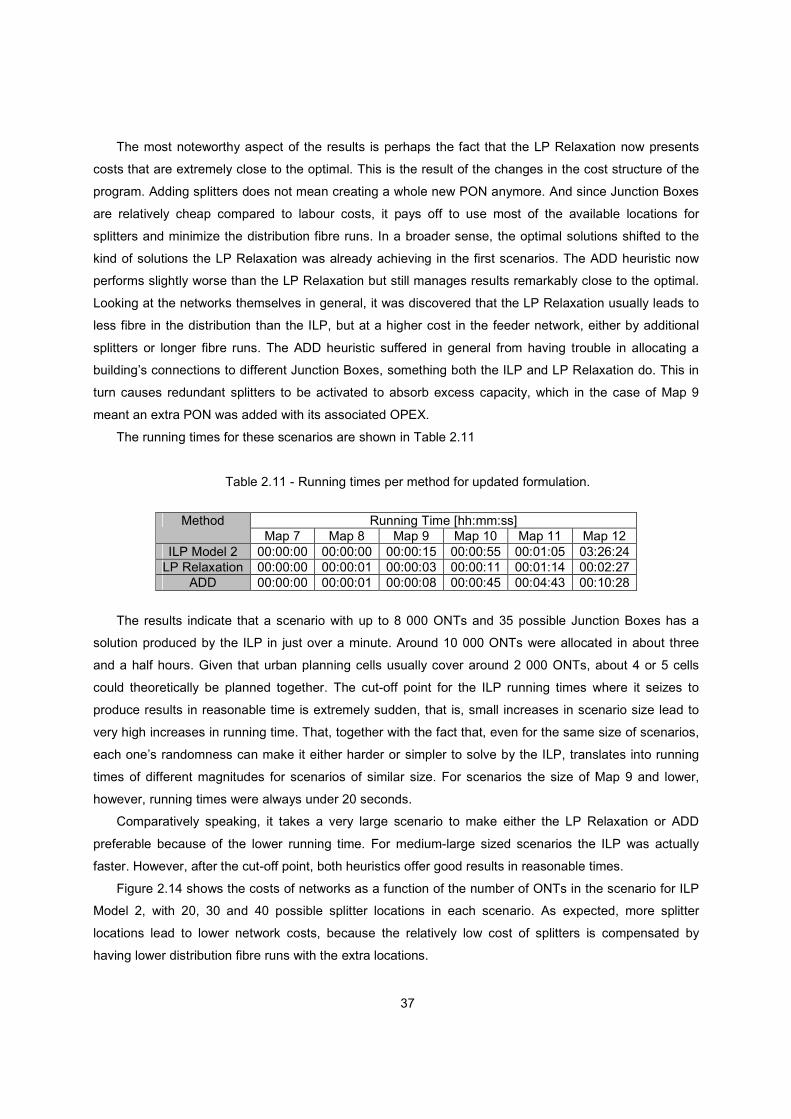
37
The most noteworthy aspect of the results is perhaps the fact that the LP Relaxation now presents
costs that are extremely close to the optimal. This is the result of the changes in the cost structure of the
program. Adding splitters does not mean creating a whole new PON anymore. And since Junction Boxes
are relatively cheap compared to labour costs, it pays off to use most of the available locations for
splitters and minimize the distribution fibre runs. In a broader sense, the optimal solutions shifted to the
kind of solutions the LP Relaxation was already achieving in the first scenarios. The ADD heuristic now
performs slightly worse than the LP Relaxation but still manages results remarkably close to the optimal.
Looking at the networks themselves in general, it was discovered that the LP Relaxation usually leads to
less fibre in the distribution than the ILP, but at a higher cost in the feeder network, either by additional
splitters or longer fibre runs. The ADD heuristic suffered in general from having trouble in allocating a
building’s connections to different Junction Boxes, something both the ILP and LP Relaxation do. This in
turn causes redundant splitters to be activated to absorb excess capacity, which in the case of Map 9
meant an extra PON was added with its associated OPEX.
The running times for these scenarios are shown in Table 2.11
Table 2.11 - Running times per method for updated formulation.
Method Running Time [hh:mm:ss] Map 7 Map 8 Map 9 Map 10 Map 11 Map 12
ILP Model 2 00:00:00 00:00:00 00:00:15 00:00:55 00:01:05 03:26:24 LP Relaxation 00:00:00 00:00:01 00:00:03 00:00:11 00:01:14 00:02:27
ADD 00:00:00 00:00:01 00:00:08 00:00:45 00:04:43 00:10:28
The results indicate that a scenario with up to 8 000 ONTs and 35 possible Junction Boxes has a
solution produced by the ILP in just over a minute. Around 10 000 ONTs were allocated in about three
and a half hours. Given that urban planning cells usually cover around 2 000 ONTs, about 4 or 5 cells
could theoretically be planned together. The cut-off point for the ILP running times where it seizes to
produce results in reasonable time is extremely sudden, that is, small increases in scenario size lead to
very high increases in running time. That, together with the fact that, even for the same size of scenarios,
each one’s randomness can make it either harder or simpler to solve by the ILP, translates into running
times of different magnitudes for scenarios of similar size. For scenarios the size of Map 9 and lower,
however, running times were always under 20 seconds.
Comparatively speaking, it takes a very large scenario to make either the LP Relaxation or ADD
preferable because of the lower running time. For medium-large sized scenarios the ILP was actually
faster. However, after the cut-off point, both heuristics offer good results in reasonable times.
Figure 2.14 shows the costs of networks as a function of the number of ONTs in the scenario for ILP
Model 2, with 20, 30 and 40 possible splitter locations in each scenario. As expected, more splitter
locations lead to lower network costs, because the relatively low cost of splitters is compensated by
having lower distribution fibre runs with the extra locations.
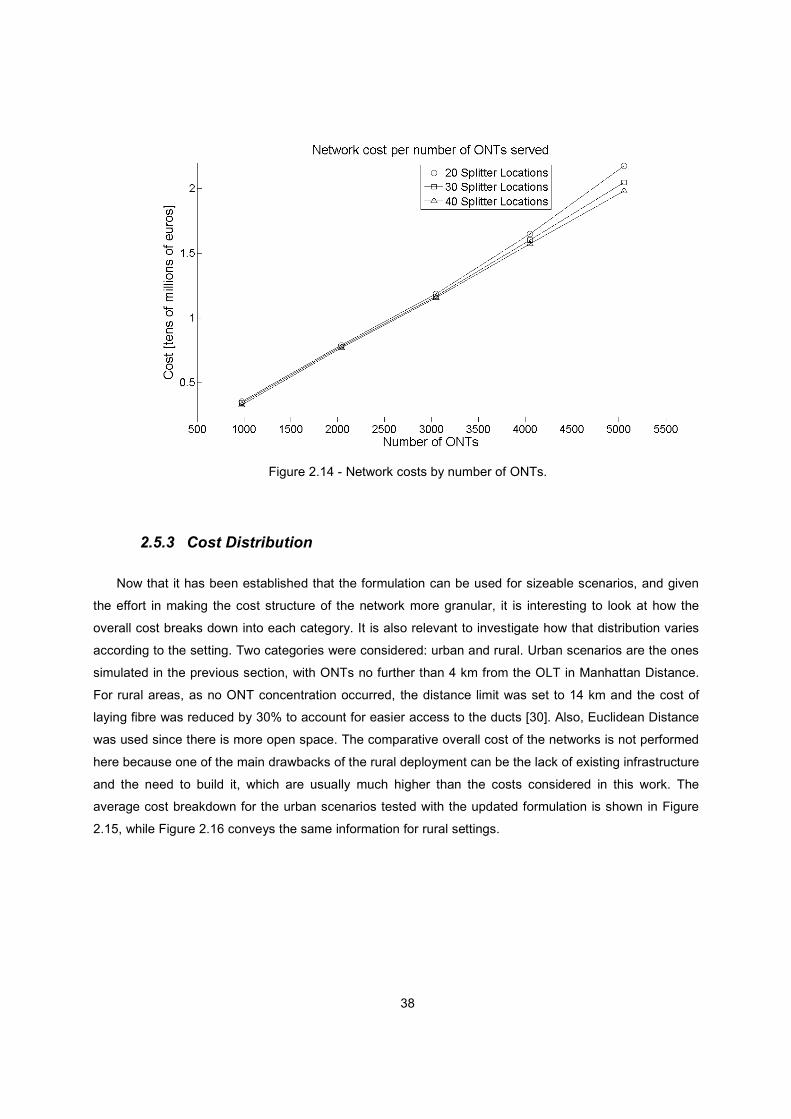
38
Figure 2.14 - Network costs by number of ONTs.
2.5.3 Cost Distribution
Now that it has been established that the formulation can be used for sizeable scenarios, and given
the effort in making the cost structure of the network more granular, it is interesting to look at how the
overall cost breaks down into each category. It is also relevant to investigate how that distribution varies
according to the setting. Two categories were considered: urban and rural. Urban scenarios are the ones
simulated in the previous section, with ONTs no further than 4 km from the OLT in Manhattan Distance.
For rural areas, as no ONT concentration occurred, the distance limit was set to 14 km and the cost of
laying fibre was reduced by 30% to account for easier access to the ducts [30]. Also, Euclidean Distance
was used since there is more open space. The comparative overall cost of the networks is not performed
here because one of the main drawbacks of the rural deployment can be the lack of existing infrastructure
and the need to build it, which are usually much higher than the costs considered in this work. The
average cost breakdown for the urban scenarios tested with the updated formulation is shown in Figure
2.15, while Figure 2.16 conveys the same information for rural settings.
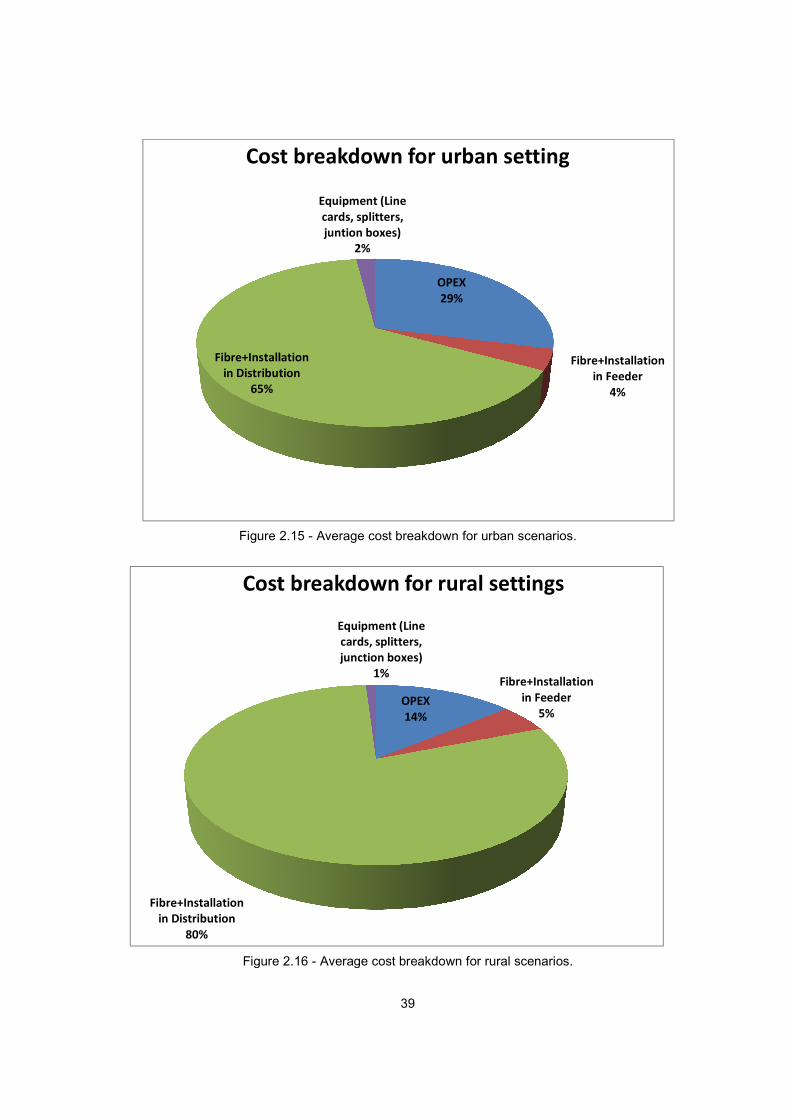
Figure 2
Figure
Fibre+Installation
in Distribution
65%
Cost breakdown for urban setting
Fibre+Installation
in Distribution
80%
Cost breakdown for rural settings
39
2.15 - Average cost breakdown for urban scenarios.
Figure 2.16 - Average cost breakdown for rural scenarios.
OPEX
29%
Fibre+Installation
in Distribution
Equipment (Line
cards, splitters,
juntion boxes)
2%
Cost breakdown for urban setting
OPEX
14%
Fibre+Installation
in Feeder
5%
Equipment (Line
cards, splitters,
junction boxes)
1%
Cost breakdown for rural settings
Average cost breakdown for urban scenarios.
Average cost breakdown for rural scenarios.
Fibre+Installation
in Feeder
4%
Cost breakdown for urban setting
Fibre+Installation
in Feeder
Cost breakdown for rural settings
40
OPEX is the cost of operating the network by line card and PON port, the feeder network costs
include the fibre itself and laying it, likewise for the distribution network. Equipment comprises the cards,
splitters and Junction Boxes. The results show that the dominant cost in the network for both cases is
labour in laying fibre. This is coherent with several sources [29] [31] [32] [33]. However, OPEX costs are
rarely considered jointly with Capital Expenditure (CAPEX), and [29] states that they can total more than
half of the cost of ownership of the network. This suggests that OPEX is perhaps under-evaluated, maybe
because the considered exploration time of the network was too short. The fibre, labour and equipment
costs would represent an even bigger portion of the total if the drop connection was considered,
specifically including the ONTs, and the labour to extend fibre from the building NAP to each individual
home. The absence of the ONTs explains why equipment costs are so low in the breakdown.
In regards to the difference between urban and rural settings, the longer runs of fibre in rural
scenarios engulfed the savings in deploying it, meaning the costs of fibre and installation grew as
opposed to OPEX costs that remain stable for the same number of customers served. This resulted in an
increase from 65 to 80% in the cost of fibre in the distribution network.
2.5.4 Costs by configuration
Another variable that can influence the costs in a PON is the splitting ratio used in each stage. This
formulation only deals with a centralized split with a first-stage at the CO. However, among these, several
combinations can be used. The most common are 1:2 + 1:32 and 1:4 + 1:16. The latter was used in the
previous scenarios. For this analysis both will be compared along with a more “exotic” configuration of 1:8
+ 1:8. The key differences in the costs considered lie in the types of splitters used and the Junction
Boxes. With splitters, the cost per output port decreases as the ratio increases, reflecting an economy of
scale [17]. For Junction Boxes, it was considered that the number of splices (i.e. the total number of exit
ports) would be the same for all configurations, but the Junction Box should be larger when housing more
splitters and therefore more expensive. This was done to ensure a direct comparison between
configurations, since changing the total Junction Box capacity would change the scenario’s conditions.
Figure 2.17 shows the costs of PONs for each of the three configurations in three selected scenarios from
the ones presented earlier.
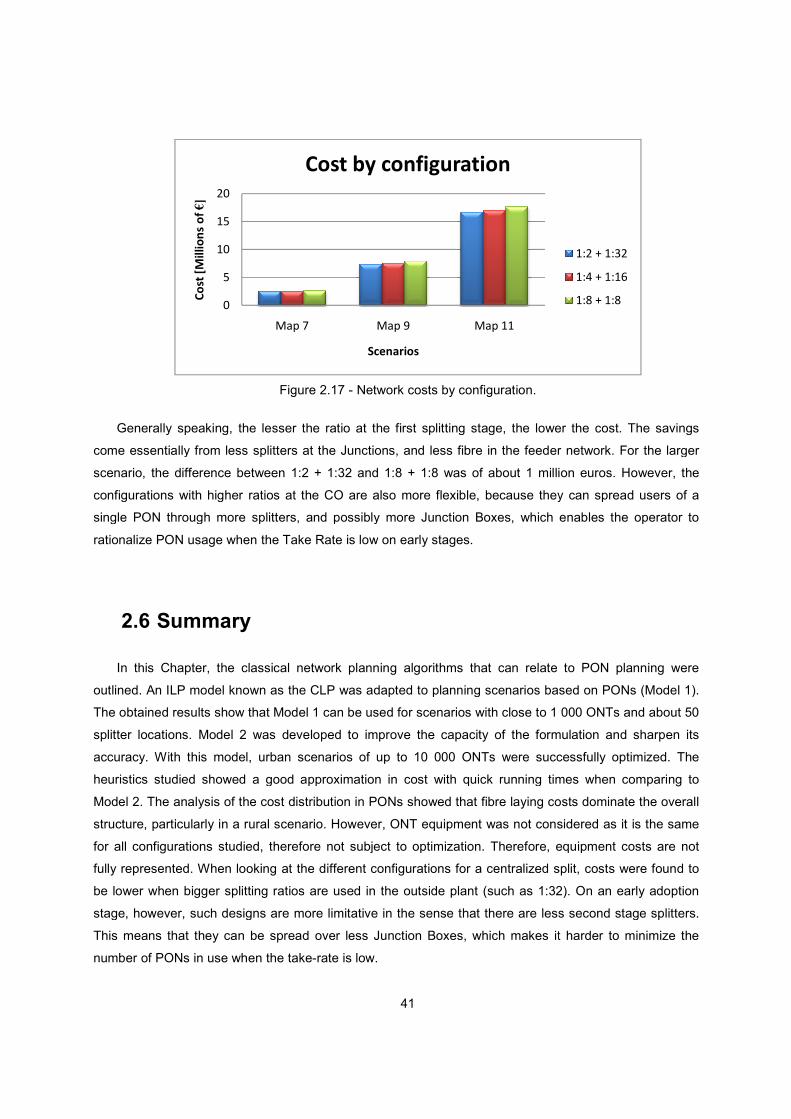
Figure
Generally speaking, the lesser the ratio at the first splitting stage, the lower the cost. The savings
come essentially from less splitters
scenario, the difference between 1:2 + 1:32 and 1:8 + 1:8 was of about 1 million euros. However, the
configurations with higher ratios at the CO are also more flexible, because they ca
single PON through more splitters, and possibly more Junction Boxes, which enables the operator to
rationalize PON usage when the Take Rate is low on early stages.
2.6 Summary
In this Chapter, the classical
outlined. An ILP model known as the CLP was adapted to planning scenarios based on
The obtained results show that Model 1 can be used for scenarios with close to 1 000 ONTs and about 50
splitter locations. Model 2 was developed
accuracy. With this model, urban scenarios of up to 10 000 ONTs were successfully optimized. The
heuristics studied showed a good approximation in
Model 2. The analysis of the cost distribution in PONs showed that fibre laying costs dominate the overall
structure, particularly in a rural scenario. However, ONT equipment was not considered as it is the same
for all configurations studied, therefore not subject to optimization. Therefore,
fully represented. When looking at the different configurations for a centralized split, costs were found to
be lower when bigger splitting ratios are used in the outside plan
stage, however, such designs are more limitative in the sense that there are less second stage splitters.
This means that they can be spread over less Junction Boxes, which makes it harder to minimize the
number of PONs in use when the take
0
5
10
15
20
Map 7
Co
st [
Mil
lio
ns
of €]
41
Figure 2.17 - Network costs by configuration.
Generally speaking, the lesser the ratio at the first splitting stage, the lower the cost. The savings
come essentially from less splitters at the Junctions, and less fibre in the feeder network. For the larger
scenario, the difference between 1:2 + 1:32 and 1:8 + 1:8 was of about 1 million euros. However, the
configurations with higher ratios at the CO are also more flexible, because they ca
single PON through more splitters, and possibly more Junction Boxes, which enables the operator to
rationalize PON usage when the Take Rate is low on early stages.
In this Chapter, the classical network planning algorithms that can relate to PON planning were
outlined. An ILP model known as the CLP was adapted to planning scenarios based on
Model 1 can be used for scenarios with close to 1 000 ONTs and about 50
was developed to improve the capacity of the formulation and sharpen its
accuracy. With this model, urban scenarios of up to 10 000 ONTs were successfully optimized. The
heuristics studied showed a good approximation in cost with quick running times
Model 2. The analysis of the cost distribution in PONs showed that fibre laying costs dominate the overall
particularly in a rural scenario. However, ONT equipment was not considered as it is the same
udied, therefore not subject to optimization. Therefore, equipment costs are not
When looking at the different configurations for a centralized split, costs were found to
be lower when bigger splitting ratios are used in the outside plant (such as 1:32).
stage, however, such designs are more limitative in the sense that there are less second stage splitters.
This means that they can be spread over less Junction Boxes, which makes it harder to minimize the
Ns in use when the take-rate is low.
Map 7 Map 9 Map 11
Scenarios
Cost by configuration
Generally speaking, the lesser the ratio at the first splitting stage, the lower the cost. The savings
at the Junctions, and less fibre in the feeder network. For the larger
scenario, the difference between 1:2 + 1:32 and 1:8 + 1:8 was of about 1 million euros. However, the
configurations with higher ratios at the CO are also more flexible, because they can spread users of a
single PON through more splitters, and possibly more Junction Boxes, which enables the operator to
can relate to PON planning were
outlined. An ILP model known as the CLP was adapted to planning scenarios based on PONs (Model 1).
Model 1 can be used for scenarios with close to 1 000 ONTs and about 50
to improve the capacity of the formulation and sharpen its
accuracy. With this model, urban scenarios of up to 10 000 ONTs were successfully optimized. The
cost with quick running times when comparing to
Model 2. The analysis of the cost distribution in PONs showed that fibre laying costs dominate the overall
particularly in a rural scenario. However, ONT equipment was not considered as it is the same
equipment costs are not
When looking at the different configurations for a centralized split, costs were found to
(such as 1:32). On an early adoption
stage, however, such designs are more limitative in the sense that there are less second stage splitters.
This means that they can be spread over less Junction Boxes, which makes it harder to minimize the
1:2 + 1:32
1:4 + 1:16
1:8 + 1:8
42
3. Multi-Stage PON Planning
In this Chapter, a new formulation is devised to allow the automated planning of a PON with more
than one explicit splitting stage. A review of the work in similar fields is made, and the ILP formulation
developed is presented. The work performed in the attempt to develop less complex heuristic procedures
for this problem is also shown. Finally, the results obtained with both approaches are demonstrated.
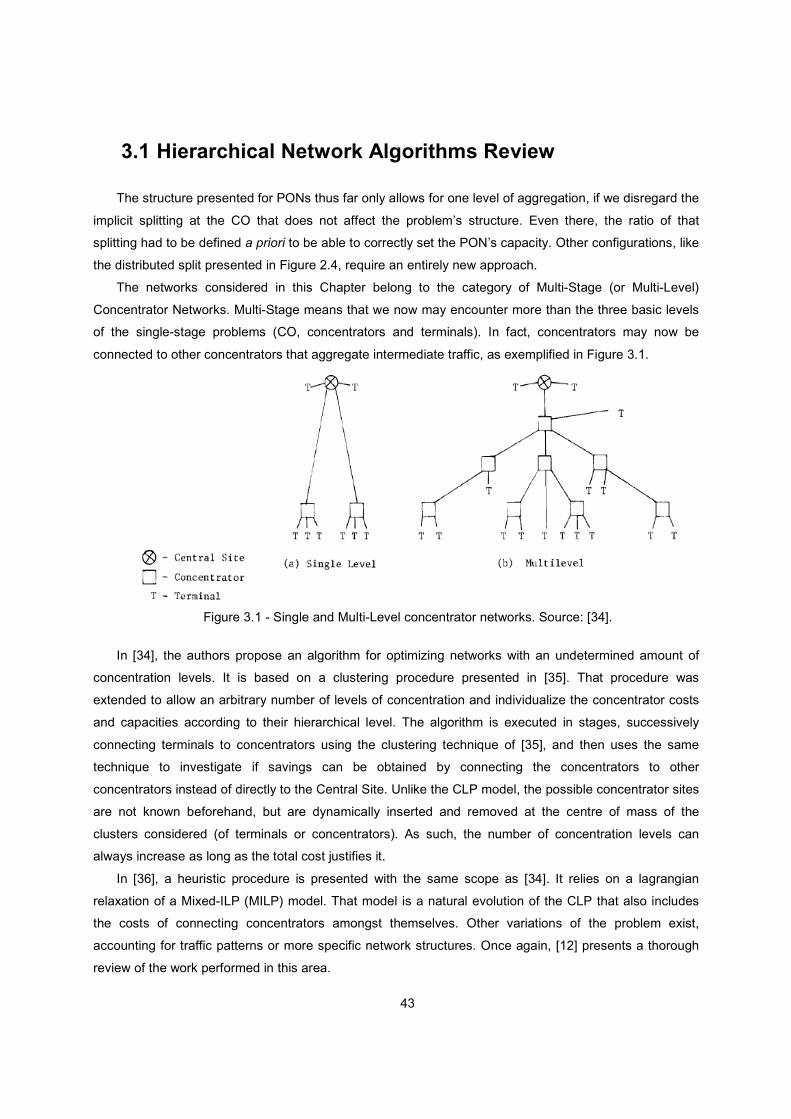
43
3.1 Hierarchical Network Algorithms Review
The structure presented for PONs thus far only allows for one level of aggregation, if we disregard the
implicit splitting at the CO that does not affect the problem’s structure. Even there, the ratio of that
splitting had to be defined a priori to be able to correctly set the PON’s capacity. Other configurations, like
the distributed split presented in Figure 2.4, require an entirely new approach.
The networks considered in this Chapter belong to the category of Multi-Stage (or Multi-Level)
Concentrator Networks. Multi-Stage means that we now may encounter more than the three basic levels
of the single-stage problems (CO, concentrators and terminals). In fact, concentrators may now be
connected to other concentrators that aggregate intermediate traffic, as exemplified in Figure 3.1.
Figure 3.1 - Single and Multi-Level concentrator networks. Source: [34].
In [34], the authors propose an algorithm for optimizing networks with an undetermined amount of
concentration levels. It is based on a clustering procedure presented in [35]. That procedure was
extended to allow an arbitrary number of levels of concentration and individualize the concentrator costs
and capacities according to their hierarchical level. The algorithm is executed in stages, successively
connecting terminals to concentrators using the clustering technique of [35], and then uses the same
technique to investigate if savings can be obtained by connecting the concentrators to other
concentrators instead of directly to the Central Site. Unlike the CLP model, the possible concentrator sites
are not known beforehand, but are dynamically inserted and removed at the centre of mass of the
clusters considered (of terminals or concentrators). As such, the number of concentration levels can
always increase as long as the total cost justifies it.
In [36], a heuristic procedure is presented with the same scope as [34]. It relies on a lagrangian
relaxation of a Mixed-ILP (MILP) model. That model is a natural evolution of the CLP that also includes
the costs of connecting concentrators amongst themselves. Other variations of the problem exist,
accounting for traffic patterns or more specific network structures. Once again, [12] presents a thorough
review of the work performed in this area.
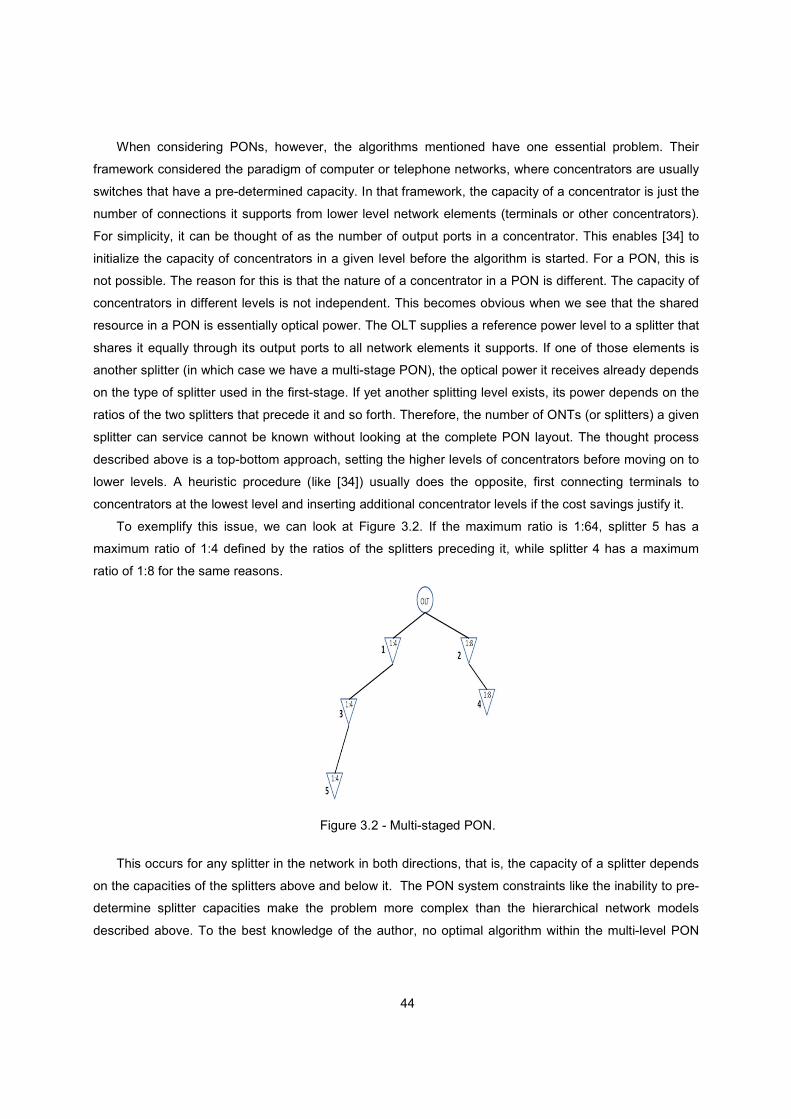
44
When considering PONs, however, the algorithms mentioned have one essential problem. Their
framework considered the paradigm of computer or telephone networks, where concentrators are usually
switches that have a pre-determined capacity. In that framework, the capacity of a concentrator is just the
number of connections it supports from lower level network elements (terminals or other concentrators).
For simplicity, it can be thought of as the number of output ports in a concentrator. This enables [34] to
initialize the capacity of concentrators in a given level before the algorithm is started. For a PON, this is
not possible. The reason for this is that the nature of a concentrator in a PON is different. The capacity of
concentrators in different levels is not independent. This becomes obvious when we see that the shared
resource in a PON is essentially optical power. The OLT supplies a reference power level to a splitter that
shares it equally through its output ports to all network elements it supports. If one of those elements is
another splitter (in which case we have a multi-stage PON), the optical power it receives already depends
on the type of splitter used in the first-stage. If yet another splitting level exists, its power depends on the
ratios of the two splitters that precede it and so forth. Therefore, the number of ONTs (or splitters) a given
splitter can service cannot be known without looking at the complete PON layout. The thought process
described above is a top-bottom approach, setting the higher levels of concentrators before moving on to
lower levels. A heuristic procedure (like [34]) usually does the opposite, first connecting terminals to
concentrators at the lowest level and inserting additional concentrator levels if the cost savings justify it.
To exemplify this issue, we can look at Figure 3.2. If the maximum ratio is 1:64, splitter 5 has a
maximum ratio of 1:4 defined by the ratios of the splitters preceding it, while splitter 4 has a maximum
ratio of 1:8 for the same reasons.
Figure 3.2 - Multi-staged PON.
This occurs for any splitter in the network in both directions, that is, the capacity of a splitter depends
on the capacities of the splitters above and below it. The PON system constraints like the inability to pre-
determine splitter capacities make the problem more complex than the hierarchical network models
described above. To the best knowledge of the author, no optimal algorithm within the multi-level PON

45
framework has been developed. This was the motivation for the development of an ILP multi-stage PON
model that is described in the following section.
3.2 Multi-Stage PON ILP Model
Given the lack of existing literature on this topic, the option for the development of a new model
followed some guidelines. The first was to approach the problem in the broadest possible sense, that is,
imposing the least possible amount of restrictions on the PON configuration. This allows for more exotic
configurations than the ones actual deployments might consider (like the distributed split). However, it
enables the formulation to act as an uncompromised common ground that can be adapted to different
settings. Furthermore, it is interesting to investigate how an “ideal” scenario compares in cost terms to a
real one with more topological restrictions. The second main principle was the use of exact optimization
algorithms (ILP) again. This was done on the one hand to maintain coherence with the previous work,
and on the other because while potentially more complex and intractable (as it would be the case), the
ILP model can be used as a benchmark to evaluate the performance of other algorithms.
The formulation of the problem borrowed its principles from the CLP, meaning the OLT site is
geographically fixed, as are all the possible locations for splitters and ONTs. Also, the connection costs
between network elements are known in advance. Because it is a problem with multiple levels of
concentrators, one idea would be to pre-assign the level of each splitter in advance. This would limit the
total possible number of connections and reduce the overall number of variables. However, it would
constraint the PON’s flexibility which is against the principles enunciated above. The selected option
enables every splitter to be connected to any other (in any hierarchical order), so the level of each splitter
is only known when looking at the final solution.
Before introducing the ILP model developed for the multi-stage problem, it is important to clarify how
the problem of appropriately setting splitter capacities described in 3.1 was addressed. Because in a PON
the biggest constraint to capacity is ultimately optical power, the logical way to address the problem would
be to create a variable that reflects a splitter’s capacity in terms of the optical power it disposes of. The
solution found was to have a set of variables, � , that denote the ratio of power splitting that can occur
after splitter �. Because in a PON optical power is always divided by a power of two, this will fit quite
nicely in an ILP formulation. The reason for this is that we can use the base 2 logarithm to represent the
number of splitting stages possible and since only splitting of 1:2, 1:4, 1:8, 1:16, 1:32 and 1:64 is possible,
the base 2 logarithm converts these ratios into a integer consecutive sequence. Also, this way a division
in power becomes a logarithmic subtraction which can also be handled by the ILP. Let us take the
example of the left side of Figure 3.3. For GPON, the OLT has a capacity of 6 (it allows 6 splitting stages
of 1:2). Splitter 1 divides the power by 4 output ports. It’s “capacity” is then:
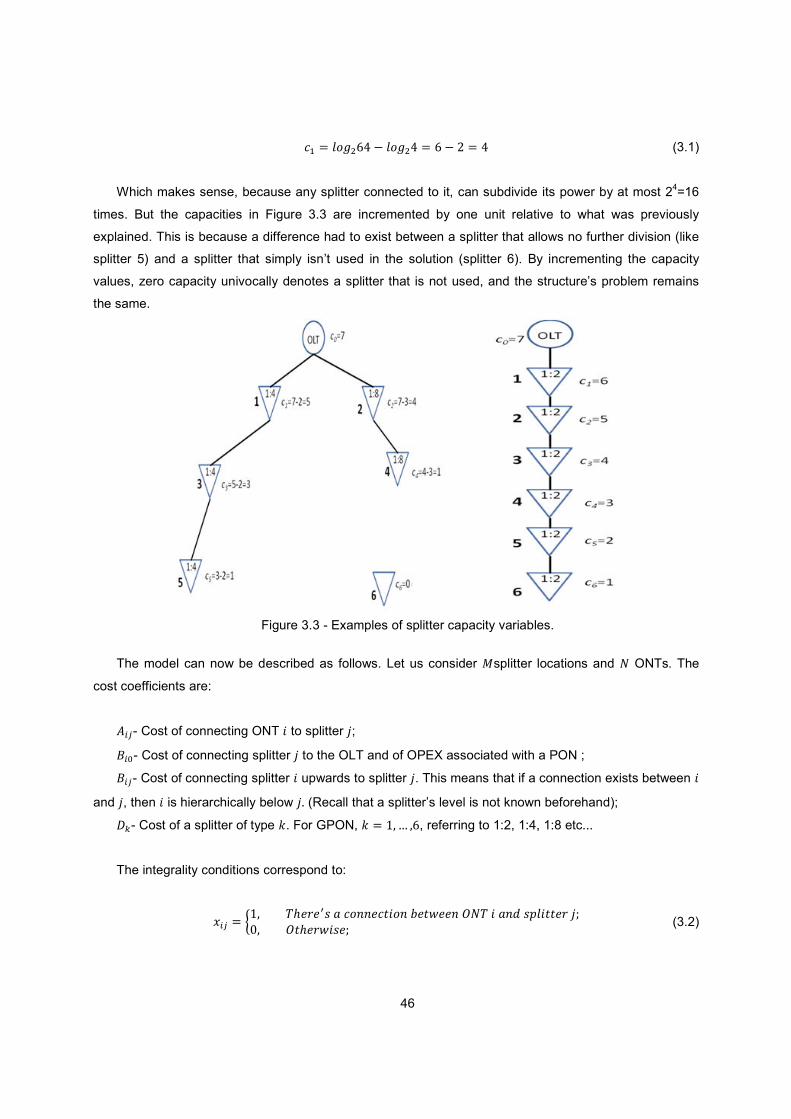
46
�� � '�bc\d V '�bcd � \ V W � d (3.1)
Which makes sense, because any splitter connected to it, can subdivide its power by at most 24=16
times. But the capacities in Figure 3.3 are incremented by one unit relative to what was previously
explained. This is because a difference had to exist between a splitter that allows no further division (like
splitter 5) and a splitter that simply isn’t used in the solution (splitter 6). By incrementing the capacity
values, zero capacity univocally denotes a splitter that is not used, and the structure’s problem remains
the same.
Figure 3.3 - Examples of splitter capacity variables.
The model can now be described as follows. Let us consider �splitter locations and � ONTs. The
cost coefficients are:
e- Cost of connecting ONT � to splitter �; f�- Cost of connecting splitter � to the OLT and of OPEX associated with a PON ;
f- Cost of connecting splitter � upwards to splitter �. This means that if a connection exists between � and �, then � is hierarchically below �- (Recall that a splitter’s level is not known beforehand);
g[- Cost of a splitter of type �. For GPON, � � ��� �\, referring to 1:2, 1:4, 1:8 etc...
The integrality conditions correspond to:
� � 2�� h/!%!i0����� !�"�� �#!"$!! �j�h���� �0F'�""!%��k.� j"/!%$�0!k 1 (3.2)

47
� � ��� h/!%!i0����� !�"�� �#!"$!! �0F'�""!%���� �0F'�""!%���Djlh��m�� � .B$/!%!����0�� !�'!n!'�#!'�$��k.� j"/!%$�0!k1 (3.3)
I[ � 2�� oF'�""!%����+�5p�,qr)�s�Ds � ��W�t�d�]�\Bk.� j"/!%$�0!k 1 (3.4)
Variables � and � are similar to the ones considered in the CLP, with � extended to allow connections
between splitters. Variables I refer to the splitter type, which, more than differentiating the cost of the
splitters, are used to shape the constraints.
Additional parameters are defined as:
o – Base 2 logarithm of the maximum split ratio of the PON technology considered. Indicates how
many splitter types there are;1
u - Very large number to ensure constraint coherency;
The objective function is:
��� �����e ? ��
���� ���f� ? ��
�
���� ����f ? �
�
��v�� ����g[ ? I[
�
��
w
[��
�
��
�
������ (3.5)
Subject to:
�� � ��
������� k �� � �� � � � (3.6)
�� � ��
��v����� k �� � �� � �� (3.7)
�W[ ? I[w
[��S��
�
��v���
�
������� k � � ��� ��� (3.8)
� � � � u=� V �> V ������k �� � �� � ���k � � .�� ������k � x �� (3.9)
� � o ?���
��v����� k �� � ��� ��� (3.10)
Vu=� V �> ��� ? I[w
[��� � V � �����k � � �� � ���k � � .� � ������k � x � (3.11)
1 1:64 and 1:32 maximum ratios considered for GPON and EPON respectively.

48
u=� V �> ��� ? I[w
[��S � V � �����k � � ��� ���k � � .�� ������k � x � (3.12)
���
�����
�
��v� u ?��
�
��v����� k � � ��W� � �� (3.13)
���
��v� � �������k � � ��W� � ��� (3.14)
�I[w
[��� ��������k � � �� � �� (3.15)
�� � o � � (3.16)
The two first terms of the objective function come directly from the CLP. The third term reflects the
costs of connecting splitters amongst themselves and the fourth term denotes the costs of each type of
splitter used. Because the differences between costs of splitter types are very low compared to the other
costs considered, the fourth term can be discarded with some confidence if running time is a problem.
The I variables are still needed for the constraints though, because it is the type of each splitter that
indicates how many output ports it has.
The constraints act as following: (3.6) ensures every ONT is connected to one and only one splitter,
(3.7) makes every splitter connect to at most one other splitter or the OLT, (3.8) states that the type of
each splitter (its split ratio) is such that its output ports are enough for every ONT and splitter connected
to it. (3.9) assures the capacity of a splitter � is necessarily lower than that of a splitter � if there is an
upwards connection between � and �. u is a number sufficiently large so that the inequality still holds even
if there is no connection between the splitters. Constraint (3.10) sets the splitter’s capacity to zero if it is
not upwardly connected to a splitter or the OLT. It also sets its maximum capacity to o. Constraints (3.11)
and (3.12) form an equality together, stating that the difference in capacities between two splitters that are
connected is determined by the splitting ratio of the lower-level splitter. Constraint (3.13) states that if a
splitter has ONTs or splitters connecting to it, then it must be connected to a splitter or the OLT. (3.14)
ensures that a splitter with upwards connections has a capacity greater than zero. (3.15) implies that
there can only be one type of splitter per location (at most) and (3.16) sets the OLT capacity. Of course
(3.16) is not a constraint in the strictest sense because the technology used is known beforehand so ��
can be set appropriately but it would require modifying some constraints for the special case of
connecting to the OLT while this allows a more clean and compact formulation. Figure 3.4 shows a two-
level PON obtained from this model. The OLT feeds one splitter which in turn feeds another three that
connect 10 ONTs. As expected, given the model’s size and complexity, medium and large networks can
have exceedingly long running times.
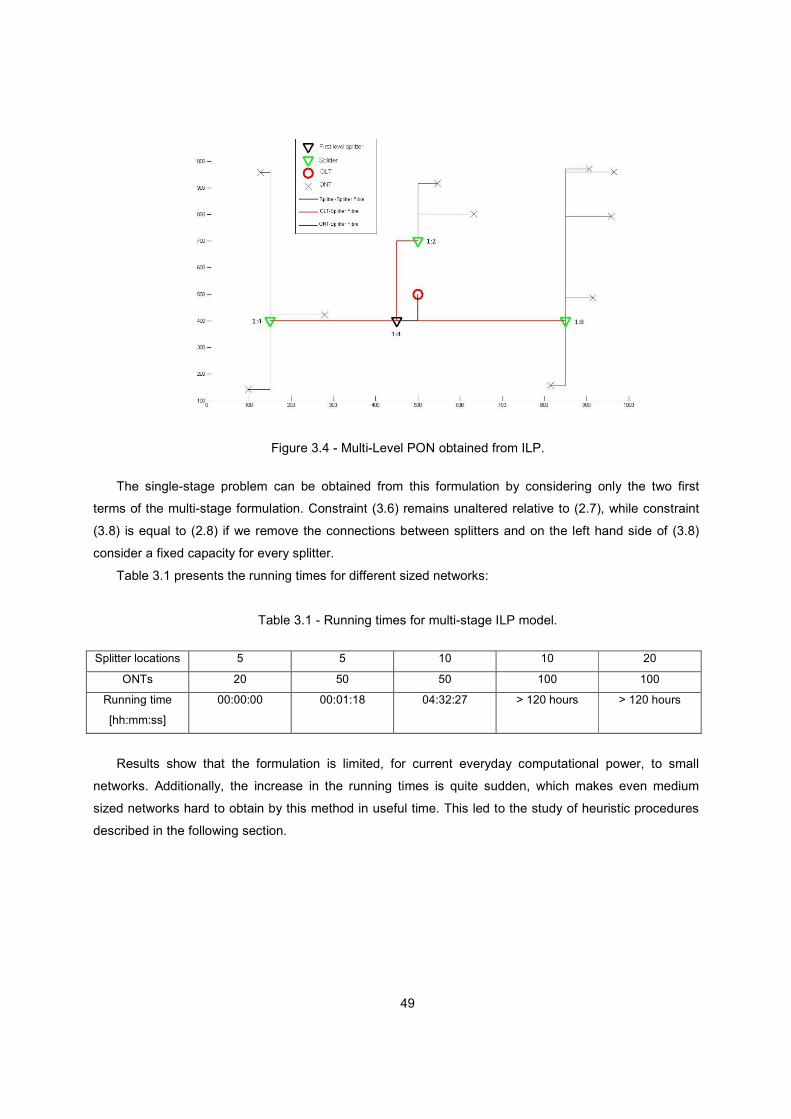
49
Figure 3.4 - Multi-Level PON obtained from ILP.
The single-stage problem can be obtained from this formulation by considering only the two first
terms of the multi-stage formulation. Constraint (3.6) remains unaltered relative to (2.7), while constraint
(3.8) is equal to (2.8) if we remove the connections between splitters and on the left hand side of (3.8)
consider a fixed capacity for every splitter.
Table 3.1 presents the running times for different sized networks:
Table 3.1 - Running times for multi-stage ILP model.
Splitter locations 5 5 10 10 20
ONTs 20 50 50 100 100
Running time
[hh:mm:ss]
00:00:00 00:01:18 04:32:27 > 120 hours > 120 hours
Results show that the formulation is limited, for current everyday computational power, to small
networks. Additionally, the increase in the running times is quite sudden, which makes even medium
sized networks hard to obtain by this method in useful time. This led to the study of heuristic procedures
described in the following section.

50
3.3 Heuristics
Because the range of scenarios that the ILP can solve in useful time is so limited, it was natural that
some heuristic procedures were developed to decrease complexity. They are presented in this section.
The LP Relaxation is tried again for this purpose, together with a newly developed algorithm for two-stage
PONs. It is also discussed how the heuristics can be combined with the ILP itself.
3.3.1 LP and MILP Relaxation
Since it presented very acceptable results in the revised single-stage problem and is relatively easy to
implement when the ILP model has been developed, the LP Relaxation was the first heuristic tested.
Unfortunately, the results were very disappointing. In the single-stage formulation there is a simple
structure and defined hierarchy, which favours the setting of variables to integers. The multi-stage model
is much more complex because of the number of possible solutions it allows, but also because it features
a reasonably complicated set of restrictions to implement PON specifications. This did not go well with the
LP Relaxation, because forcing variables to integer often led to making the problem unfeasible. The most
common occurrence was on one iteration the program connecting one splitter to another, and in the next
connecting the latter to the former, forming a cycle. When a verification phase was added to prevent this,
the Relaxation fixed the splitters’ capacities to values that again made the problem unfeasible.
The next strategy was turning the problem into a MILP, by only allowing certain variables to be real
while others remain integer. The obvious consequence of this procedure is that the running time in each
iteration would be much higher, but hopefully still lower than the full integer program. All combinations of
the sets of variables were relaxed, but the only method that actually produced feasible results was
relaxing the � and �� variables. One might notice that this is essentially relaxing the single-stage part of
the program (the ONT-splitter and OLT-splitter connections). What happened was that the MILP model
itself was too heavy in each iteration and executing it several times resulted in running times higher than
that of the ILP itself.
Faced with these results, another heuristic had to be created for the problem, and it will be discussed
in the following section.
3.3.2 Two-Stage Multi-Level Heuristic
Failing to get results with the LP Relaxation, a heuristic was developed from scratch for this problem.
For simplicity, this heuristic was limited to two stages of splitters. A third stage can be implicit at the CO
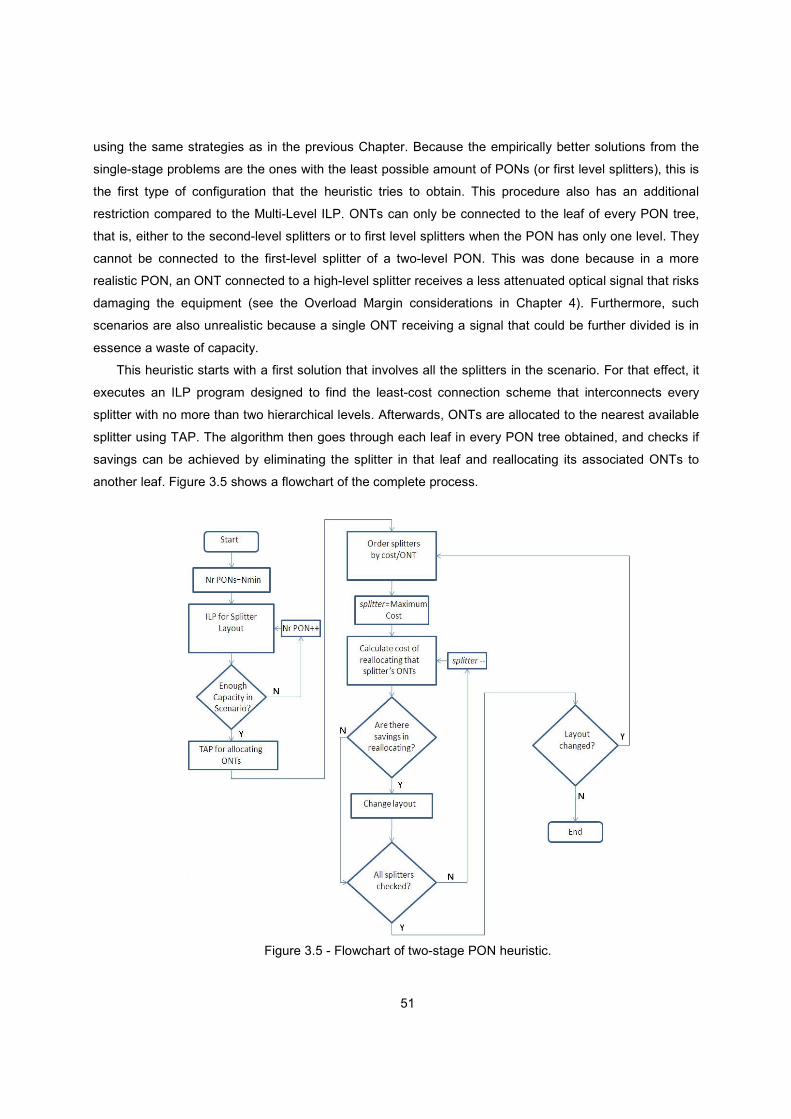
51
using the same strategies as in the previous Chapter. Because the empirically better solutions from the
single-stage problems are the ones with the least possible amount of PONs (or first level splitters), this is
the first type of configuration that the heuristic tries to obtain. This procedure also has an additional
restriction compared to the Multi-Level ILP. ONTs can only be connected to the leaf of every PON tree,
that is, either to the second-level splitters or to first level splitters when the PON has only one level. They
cannot be connected to the first-level splitter of a two-level PON. This was done because in a more
realistic PON, an ONT connected to a high-level splitter receives a less attenuated optical signal that risks
damaging the equipment (see the Overload Margin considerations in Chapter 4). Furthermore, such
scenarios are also unrealistic because a single ONT receiving a signal that could be further divided is in
essence a waste of capacity.
This heuristic starts with a first solution that involves all the splitters in the scenario. For that effect, it
executes an ILP program designed to find the least-cost connection scheme that interconnects every
splitter with no more than two hierarchical levels. Afterwards, ONTs are allocated to the nearest available
splitter using TAP. The algorithm then goes through each leaf in every PON tree obtained, and checks if
savings can be achieved by eliminating the splitter in that leaf and reallocating its associated ONTs to
another leaf. Figure 3.5 shows a flowchart of the complete process.
Figure 3.5 - Flowchart of two-stage PON heuristic.

52
The first step involves calculating the minimal number of PONs that can serve all the ONTs in the
scenario according to each technology, �H. Then, an ILP that finds the least costly connection scheme
involving all splitters in the scenario and only �H of them being first-level splitters is executed. This
program is stated as:
���P �f� ? ���
���� ����f ? �
�
��v�
�
�� (3.17)
Subject to:
�� � ��
������ k �� � ��� �� (3.18)
��� � �H�
�� (3.19)
� � �������k � � ��� ���k � � �� � ������k � x � (3.20)
Again, f represent the costs of interconnecting splitters and � � �� denote the existence of
connections between splitters and from these to the OLT respectively, as in the Multi-Stage ILP Model.
This program calculates a lowest-cost layout where all the splitters are connected (3.18) and there
are exactly �H PONs (3.19). Constraint (3.20) ensures that a splitter can only be upwardly connected to
the OLT itself or another splitter that is directly connected to the OLT, ensuring that there are no more
than two hierarchical levels in the solution.
This program does not account for ONT-splitter connections directly but they are still included in the
process. This happens because f� now reflects a different kind of cost. The goal of this ILP is to
intuitively get a good first-order approximation of the splitters’ connections amongst themselves. The
problem is that when a splitter is selected as first-level, no ONTs can connect to it, even if it was a good
candidate (for instance if it is close to a large cluster of ONTs). To account for this, f� was modified to
include the costs of reallocating ONTs that would ordinarily be assigned to the first-level splitter �. This is
achieved by pre-assigning each ONT to the closest splitter (using the TAP). The cost f� is now the cost
of connecting the splitter � to the OLT plus the cost of reallocating each ONT that would normally be
assigned to � to the next-closest splitter. Naturally, that reassignment might be made to a splitter that will
also be in the first-level in the final solution or one that will be discarded later in the process. However, it
functions as a first-order approximation of the cost-penalty incurred by not being able to connect ONTs to
a given splitter because it is in the first level.
Following the execution of the ILP, the next step is checking if the proposed layout has enough
capacity for all ONTs in the scenario. This is necessary because when the splitter layout is defined, it can
happen that first-level splitters have fewer splitters connected to them than their capacity allows. This
means that the PONs capacity is under-used and it is possible that the layout might not have enough
capacity for the entire scenario. As an example, consider a layout with one first level splitter and three
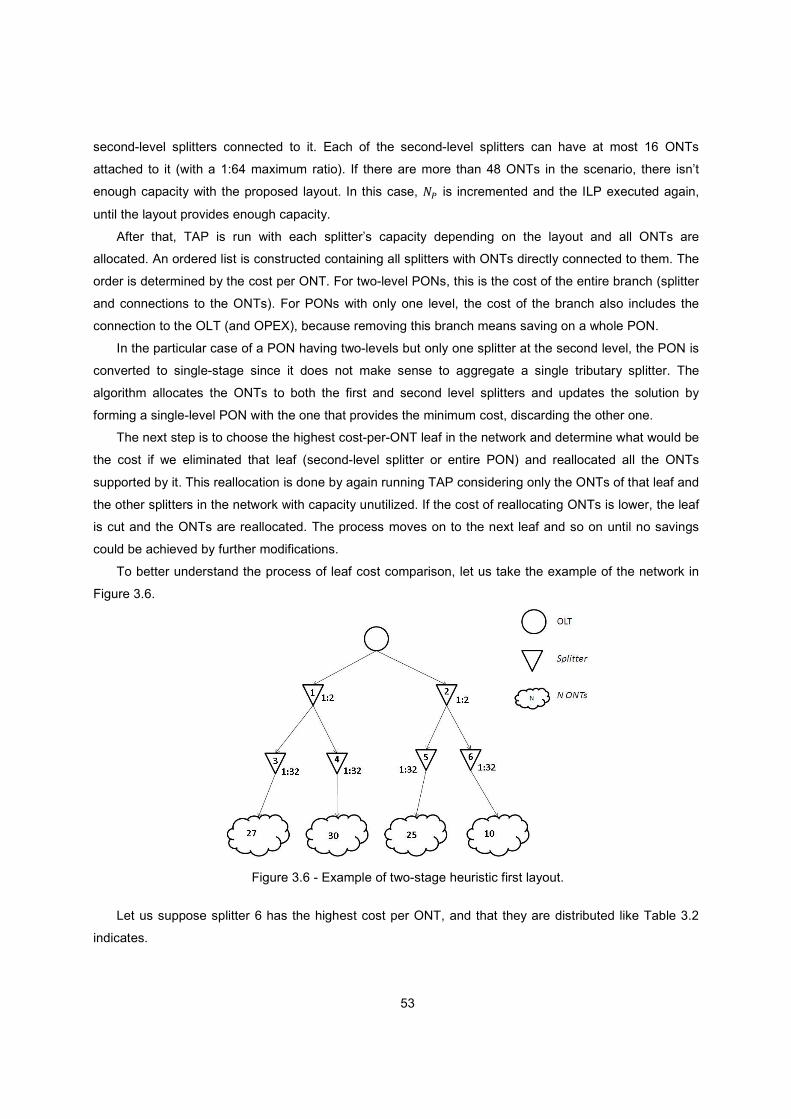
53
second-level splitters connected to it. Each of the second-level splitters can have at most 16 ONTs
attached to it (with a 1:64 maximum ratio). If there are more than 48 ONTs in the scenario, there isn’t
enough capacity with the proposed layout. In this case, �H is incremented and the ILP executed again,
until the layout provides enough capacity.
After that, TAP is run with each splitter’s capacity depending on the layout and all ONTs are
allocated. An ordered list is constructed containing all splitters with ONTs directly connected to them. The
order is determined by the cost per ONT. For two-level PONs, this is the cost of the entire branch (splitter
and connections to the ONTs). For PONs with only one level, the cost of the branch also includes the
connection to the OLT (and OPEX), because removing this branch means saving on a whole PON.
In the particular case of a PON having two-levels but only one splitter at the second level, the PON is
converted to single-stage since it does not make sense to aggregate a single tributary splitter. The
algorithm allocates the ONTs to both the first and second level splitters and updates the solution by
forming a single-level PON with the one that provides the minimum cost, discarding the other one.
The next step is to choose the highest cost-per-ONT leaf in the network and determine what would be
the cost if we eliminated that leaf (second-level splitter or entire PON) and reallocated all the ONTs
supported by it. This reallocation is done by again running TAP considering only the ONTs of that leaf and
the other splitters in the network with capacity unutilized. If the cost of reallocating ONTs is lower, the leaf
is cut and the ONTs are reallocated. The process moves on to the next leaf and so on until no savings
could be achieved by further modifications.
To better understand the process of leaf cost comparison, let us take the example of the network in
Figure 3.6.
Figure 3.6 - Example of two-stage heuristic first layout.
Let us suppose splitter 6 has the highest cost per ONT, and that they are distributed like Table 3.2
indicates.
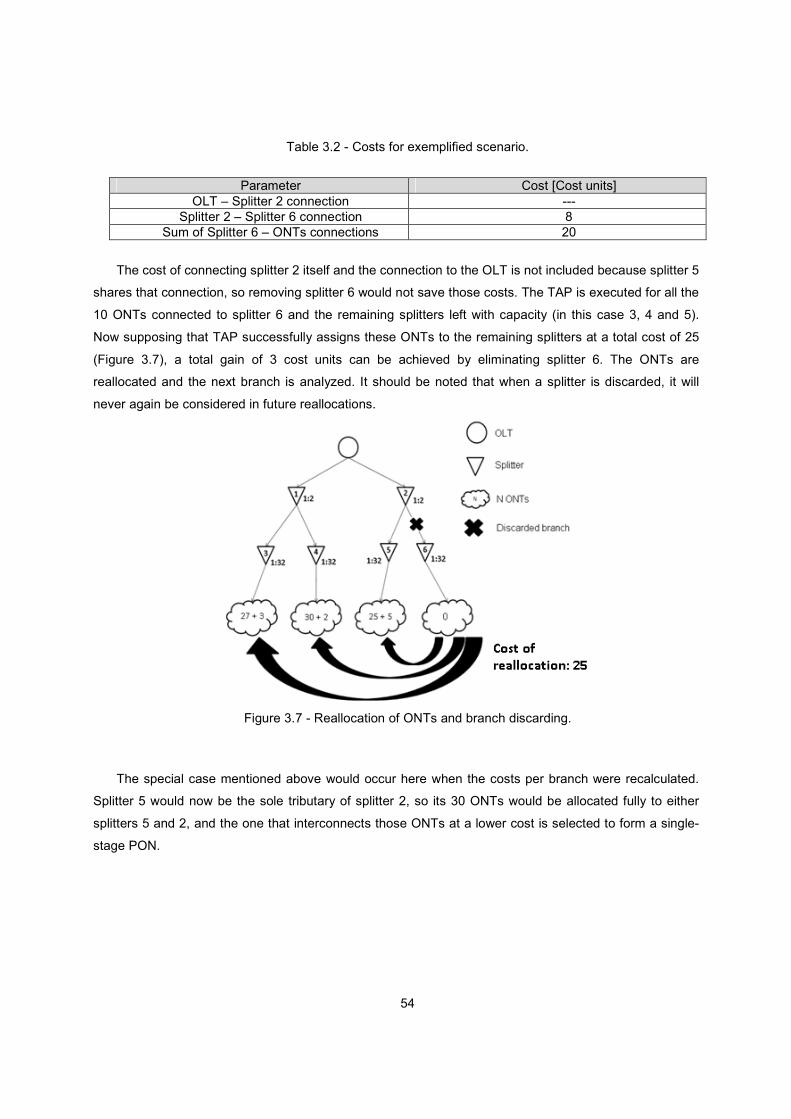
54
Table 3.2 - Costs for exemplified scenario.
Parameter Cost [Cost units] OLT – Splitter 2 connection ---
Splitter 2 – Splitter 6 connection 8 Sum of Splitter 6 – ONTs connections 20
The cost of connecting splitter 2 itself and the connection to the OLT is not included because splitter 5
shares that connection, so removing splitter 6 would not save those costs. The TAP is executed for all the
10 ONTs connected to splitter 6 and the remaining splitters left with capacity (in this case 3, 4 and 5).
Now supposing that TAP successfully assigns these ONTs to the remaining splitters at a total cost of 25
(Figure 3.7), a total gain of 3 cost units can be achieved by eliminating splitter 6. The ONTs are
reallocated and the next branch is analyzed. It should be noted that when a splitter is discarded, it will
never again be considered in future reallocations.
Figure 3.7 - Reallocation of ONTs and branch discarding.
The special case mentioned above would occur here when the costs per branch were recalculated.
Splitter 5 would now be the sole tributary of splitter 2, so its 30 ONTs would be allocated fully to either
splitters 5 and 2, and the one that interconnects those ONTs at a lower cost is selected to form a single-
stage PON.

55
3.3.3 Heuristic Bound
Because the previous heuristic seemed to provide apparently reasonable results for multi-stage
networks, it seemed appropriate to use that result to try to improve the ILP model. The underlying concept
for this strategy is based on the solving method the Branch & Bound algorithm uses to solve the ILP
problem. Branch & Bound starts by, for a given integer variable, fixing it in one of its possible values.
Then it proceeds to solve the corresponding LP problem which will be much faster than the LP. The
optimal cost obtained from solving the LP model is a lower bound of the ILP problem, since the solution
space of the LP problem encompasses that of the ILP [37]. We now know, that for a given fixed value for
some variable (or various), the cost will always be equal or greater than the one obtained with the LP.
Supposing a feasible solution for the ILP has already been found earlier by the algorithm, the whole
branch of solutions given by the variables already fixed can be discarded if that feasible solution is lower
than the lower bound given by the LP solution for that branch.
Because the heuristic operates on the same principles and costs that the ILP does, the solution
provided by the heuristic is necessarily a feasible solution of the ILP problem. That solution can then be
fed to the ILP as a lower bound at the start of the program, and any branches whose LP solution exceeds
the cost of the heuristic can be ignored by the algorithm, potentially saving time. The closer the cost is to
the optimal, the better the bound is and the more solutions can be discarded.
This approach proved correct in theory, since some scenarios were successfully simulated in less
time than without any initial bound. In the best case registered, a scenario dropped from a running time of
12 minutes to under 7 minutes. However, in general, the bounding procedure offered little practical
results, since significant savings in time were obtained for only a reduced number of scenarios, with no
discernible pattern for the type of networks where the bounding was most effective. In the majority of
cases, the difference was negligible. One might argue that this might be related with the bounds given by
the heuristic not being close enough to the optimum to allow discarding a lot of solutions. To assert this,
scenarios in which the optimum value was given by the ILP in reasonable time were again executed but
this time fed with a bound very close to the optimum. No significant improvements were achieved. It was
observed that when solving LP relaxations of the model, the costs obtained were much lower than those
of the heuristic. Because the model has such an intertwined set of restrictions, when relaxing the
variables, they tend to assume “strange” values which allow the solution to save on costs that the ILP
cannot avoid (such as OPEX when connecting to the OLT). This way, the bounds given by the LP solving
are usually much lower than the heuristic bound, and the solution branches still need to be checked
exhaustively.
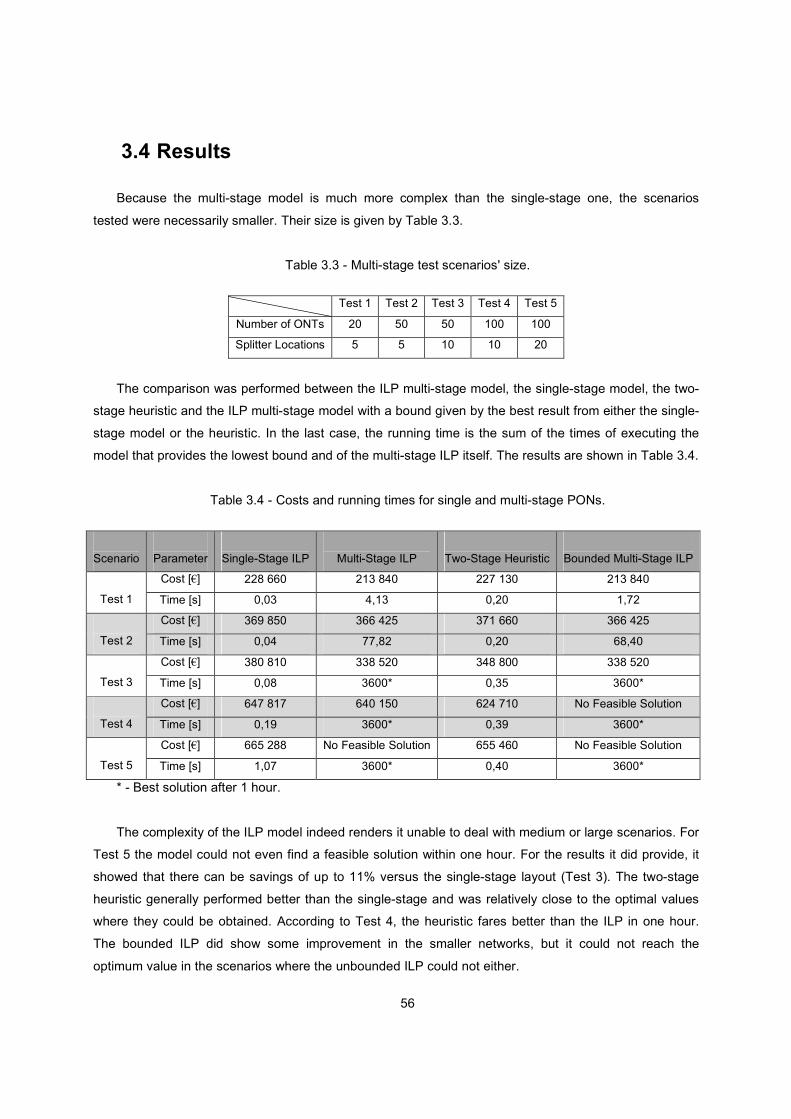
56
3.4 Results
Because the multi-stage model is much more complex than the single-stage one, the scenarios
tested were necessarily smaller. Their size is given by Table 3.3.
Table 3.3 - Multi-stage test scenarios' size.
Test 1 Test 2 Test 3 Test 4 Test 5
Number of ONTs 20 50 50 100 100
Splitter Locations 5 5 10 10 20
The comparison was performed between the ILP multi-stage model, the single-stage model, the two-
stage heuristic and the ILP multi-stage model with a bound given by the best result from either the single-
stage model or the heuristic. In the last case, the running time is the sum of the times of executing the
model that provides the lowest bound and of the multi-stage ILP itself. The results are shown in Table 3.4.
Table 3.4 - Costs and running times for single and multi-stage PONs.
Scenario
Parameter
Single-Stage ILP
Multi-Stage ILP
Two-Stage Heuristic
Bounded Multi-Stage ILP
Test 1
Cost [€] 228 660 213 840 227 130 213 840
Time [s] 0,03 4,13 0,20 1,72
Test 2
Cost [€] 369 850 366 425 371 660 366 425
Time [s] 0,04 77,82 0,20 68,40
Test 3
Cost [€] 380 810 338 520 348 800 338 520
Time [s] 0,08 3600* 0,35 3600*
Test 4
Cost [€] 647 817 640 150 624 710 No Feasible Solution
Time [s] 0,19 3600* 0,39 3600*
Test 5
Cost [€] 665 288 No Feasible Solution 655 460 No Feasible Solution
Time [s] 1,07 3600* 0,40 3600*
* - Best solution after 1 hour.
The complexity of the ILP model indeed renders it unable to deal with medium or large scenarios. For
Test 5 the model could not even find a feasible solution within one hour. For the results it did provide, it
showed that there can be savings of up to 11% versus the single-stage layout (Test 3). The two-stage
heuristic generally performed better than the single-stage and was relatively close to the optimal values
where they could be obtained. According to Test 4, the heuristic fares better than the ILP in one hour.
The bounded ILP did show some improvement in the smaller networks, but it could not reach the
optimum value in the scenarios where the unbounded ILP could not either.
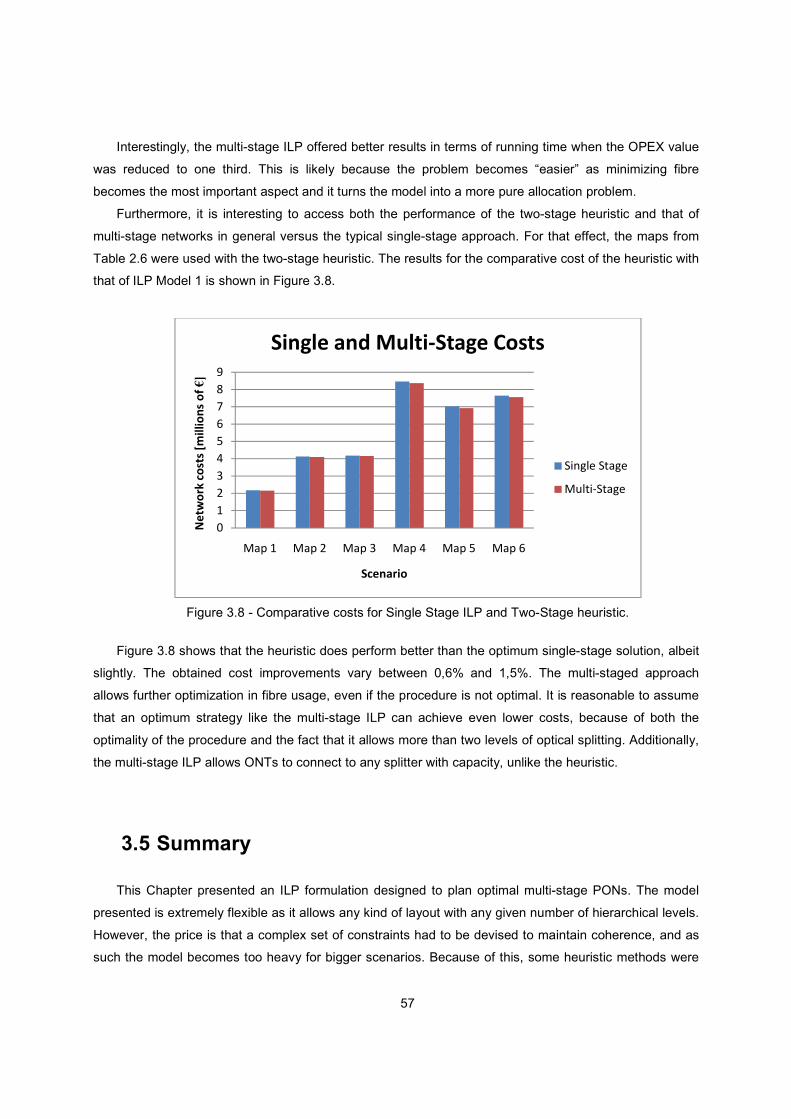
57
Interestingly, the multi-stage ILP offered better results in terms of running time when the OPEX value
was reduced to one third. This is likely because the problem becomes “easier” as minimizing fibre
becomes the most important aspect and it turns the model into a more pure allocation problem.
Furthermore, it is interesting to access both the performance of the two-stage heuristic and that of
multi-stage networks in general versus the typical single-stage approach. For that effect, the maps from
Table 2.6 were used with the two-stage heuristic. The results for the comparative cost of the heuristic with
that of ILP Model 1 is shown in Figure 3.8.
Figure 3.8 - Comparative costs for Single Stage ILP and Two-Stage heuristic.
Figure 3.8 shows that the heuristic does perform better than the optimum single-stage solution, albeit
slightly. The obtained cost improvements vary between 0,6% and 1,5%. The multi-staged approach
allows further optimization in fibre usage, even if the procedure is not optimal. It is reasonable to assume
that an optimum strategy like the multi-stage ILP can achieve even lower costs, because of both the
optimality of the procedure and the fact that it allows more than two levels of optical splitting. Additionally,
the multi-stage ILP allows ONTs to connect to any splitter with capacity, unlike the heuristic.
3.5 Summary
This Chapter presented an ILP formulation designed to plan optimal multi-stage PONs. The model
presented is extremely flexible as it allows any kind of layout with any given number of hierarchical levels.
However, the price is that a complex set of constraints had to be devised to maintain coherence, and as
such the model becomes too heavy for bigger scenarios. Because of this, some heuristic methods were
0
1
2
3
4
5
6
7
8
9
Map 1 Map 2 Map 3 Map 4 Map 5 Map 6
Ne
two
rk c
ost
s [m
illi
on
s o
f €]
Scenario
Single and Multi-Stage Costs
Single Stage
Multi-Stage

58
attempted. The LP relaxation of the model proved unfeasible. A heuristic was developed with the TAP as
its building block, for PONs with up to two stages of splitting. The algorithm produces quick results that
tend to improve when the scenarios grow larger. Its gap to the optimum is hard to assess because
optimum results could not be achieved for large networks, and the bound given by the LP relaxation is
unrealistically low. However, when compared to the single-stage ILP Model 1, it shows a slight cost
improvement for the same scenarios because of less fibre usage.
The last method studied was to use the results of the heuristic or the single-stage model to feed the
multi-stage ILP with an upper bound to start with. This approach proved correct in theory, as some
improvement was verified, but still not enough to make the ILP applicable to larger networks.
59
4. Physical, Technological and
Topology Aspects
This Chapter addresses the more technological aspects of PONs. First, the physical layer
specifications of PONs, like the optical power budget, dispersion effects and differential distance are
introduced into the planning procedures. Then, according to those specifications, the single-stage models
are adapted to study how the physical requirements might affect the current deployments’ evolution to the
next generation of PONs at 10 Gbps. Finally, a comparison is performed between PON and P2P
architectures, in terms of cost and bandwidth available.
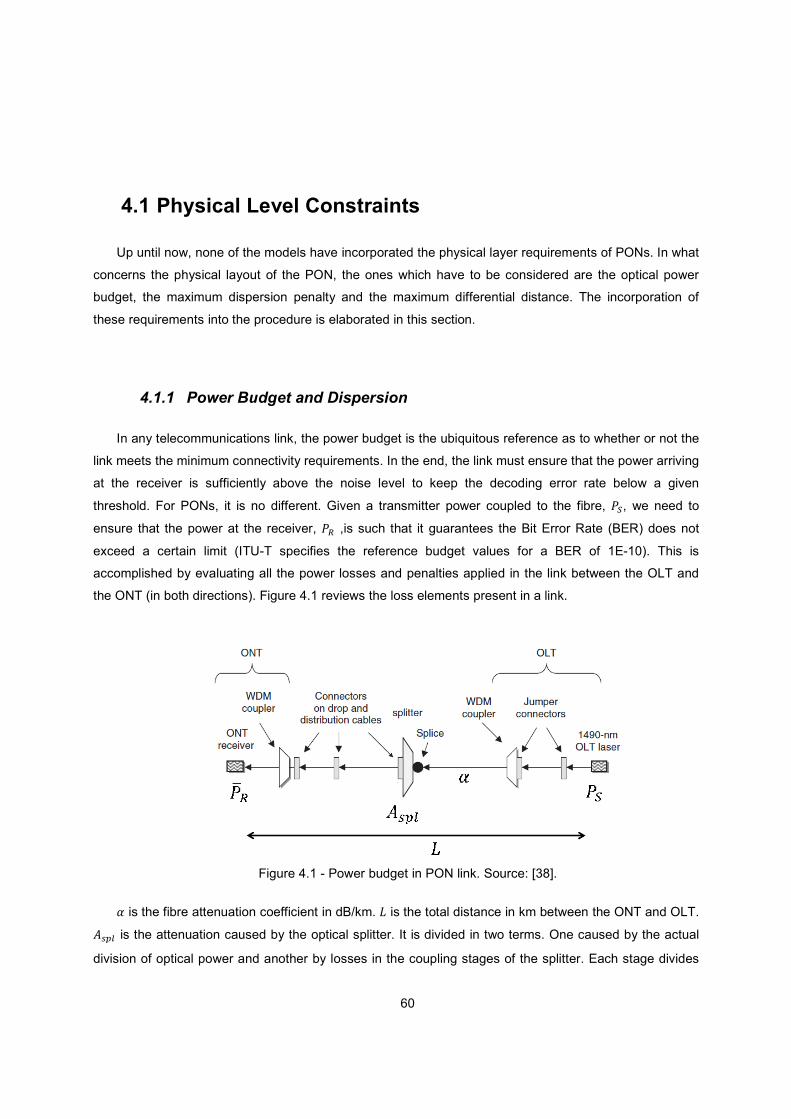
60
4.1 Physical Level Constraints
Up until now, none of the models have incorporated the physical layer requirements of PONs. In what
concerns the physical layout of the PON, the ones which have to be considered are the optical power
budget, the maximum dispersion penalty and the maximum differential distance. The incorporation of
these requirements into the procedure is elaborated in this section.
4.1.1 Power Budget and Dispersion
In any telecommunications link, the power budget is the ubiquitous reference as to whether or not the
link meets the minimum connectivity requirements. In the end, the link must ensure that the power arriving
at the receiver is sufficiently above the noise level to keep the decoding error rate below a given
threshold. For PONs, it is no different. Given a transmitter power coupled to the fibre, yw, we need to
ensure that the power at the receiver, yz ,is such that it guarantees the Bit Error Rate (BER) does not
exceed a certain limit (ITU-T specifies the reference budget values for a BER of 1E-10). This is
accomplished by evaluating all the power losses and penalties applied in the link between the OLT and
the ONT (in both directions). Figure 4.1 reviews the loss elements present in a link.
Figure 4.1 - Power budget in PON link. Source: [38].
{ is the fibre attenuation coefficient in dB/km. l is the total distance in km between the ONT and OLT.
e|}~ is the attenuation caused by the optical splitter. It is divided in two terms. One caused by the actual
division of optical power and another by losses in the coupling stages of the splitter. Each stage divides
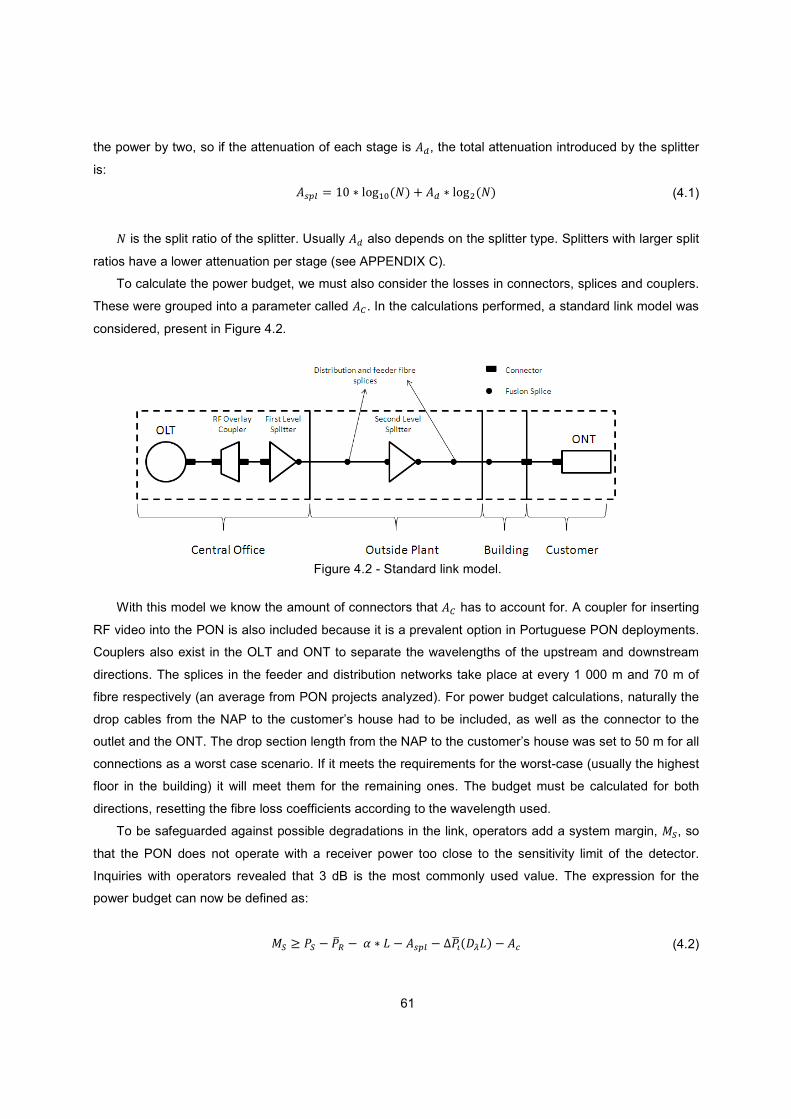
61
the power by two, so if the attenuation of each stage is e�, the total attenuation introduced by the splitter
is:
e|}~ � �. ? 75���D�B � e� ? 75�cD�B (4.1)
� is the split ratio of the splitter. Usually e� also depends on the splitter type. Splitters with larger split
ratios have a lower attenuation per stage (see APPENDIX C).
To calculate the power budget, we must also consider the losses in connectors, splices and couplers.
These were grouped into a parameter called eG . In the calculations performed, a standard link model was
considered, present in Figure 4.2.
Figure 4.2 - Standard link model.
With this model we know the amount of connectors that eG has to account for. A coupler for inserting
RF video into the PON is also included because it is a prevalent option in Portuguese PON deployments.
Couplers also exist in the OLT and ONT to separate the wavelengths of the upstream and downstream
directions. The splices in the feeder and distribution networks take place at every 1 000 m and 70 m of
fibre respectively (an average from PON projects analyzed). For power budget calculations, naturally the
drop cables from the NAP to the customer’s house had to be included, as well as the connector to the
outlet and the ONT. The drop section length from the NAP to the customer’s house was set to 50 m for all
connections as a worst case scenario. If it meets the requirements for the worst-case (usually the highest
floor in the building) it will meet them for the remaining ones. The budget must be calculated for both
directions, resetting the fibre loss coefficients according to the wavelength used.
To be safeguarded against possible degradations in the link, operators add a system margin, �w, so
that the PON does not operate with a receiver power too close to the sensitivity limit of the detector.
Inquiries with operators revealed that 3 dB is the most commonly used value. The expression for the
power budget can now be defined as:
�w S yw V y�z V �{ ? l V e|}~ V uy��Dg�lB V e� (4.2)
62
uy��Dg�lB is the power penalty associated with dispersion related effects.
In the simulations performed, the values used were based on an industry best practise for GPON
found in [39], which relates to Class B+ GPON systems. For further details on the specifications, please
refer to APPENDIX C.
The model developed by [17] directly accounts for power budget constraints in the ILP model (and
also differential distance). In ILP Model 2, with a fixed architecture, (the one in the standard model), the
only real variable in expression (4.2) is distance, so if we define a maximum distance for the feeder and
distribution fibre runs, the constraint is easily added to the model. But to limit the overall OLT-ONT
distance, one would need additional variables to relate the ONT-splitter and splitter-OLT runs. As such,
[17] requires additional constraints to check the budget feasibility of every possible feeder and distribution
connection (like the multi-stage formulation did for the capacity restrictions). In this work, a simpler
approach was adopted. Because we know beforehand the lengths of all the connection paths, the power
budget can be computed for every feeder+distribution combination before the ILP is executed. With the
standard link model presented, this is very fast even for large networks. In this way, we find out which
ONTs cannot be connected to which splitter locations. If the power budget is not met for a given
connection, we simply set the appropriate � � . in the ILP. This avoids adding complexity to the model
and still achieves the same goals.
Another budget related issue that needs to be addressed is the Overload Margin, �:. The power
reaching the ONT or the OLT cannot exceed a given threshold, otherwise it risks damaging the
equipment. Similar calculations to the power budget must be made, only this time assuming “best-case”
scenarios, that is, the ones where the most power reaches the terminals. This means not considering
power penalties or the system margin. The power reaching a detector must be below its Overload Power.
y:, by at least the value of the Overload Margin. This condition is expressed by:
y: � yw V �{ ? l V e|}~ V e� ��: (4.3)
If the maximum receiver power criteria are not met, there is an option of using optical attenuators.
However that was not considered in this framework.
The power penalties play an important role in the link budget. They account for degradation in the
Signal-to-Noise Ratio (SNR) caused by physical effects like chromatic dispersion, non-ideal extinction
ratios, frequency chirping, etc... In PONs, the optical links are relatively short as are the bit rates when
compared to transport links, so these effects are much more negligible [38]. However, because we will
look at PONs operating at 10 Gbps in Section 4.2, it is important to make sure these effects do not
become more noticeable. There were two penalties considered here. One is the burst-mode penalty. In a
TDM-PON, the OLT receives information in bursts, as each ONT transmits in different time periods.
Because each ONT is at a different distance from the OLT, the phase and amplitude of each signal will be
different, which forces the receiver to quickly adjust. For this purpose power levelling is used to smooth
63
the differences in the receiving amplitudes. Because the ITU-T parameters used already factor in a 3 dB
penalty to the OLT receiver sensitivity because of burst-mode operation, this penalty is already implied in
the model. The other factor is chromatic dispersion. This arises from the fact that the several wavelengths
in the optical signal travel at different speeds, which causes the signal to become increasingly distorted in
time leading to inter-symbol interference. This is accounted for by setting a power penalty associated with
the parameters that influence dispersion that cannot be exceeded. For details, again refer to APPENDIX
C. The dispersion effects are mentioned here because they were dealt with in the same way as the power
budget. The only changing variable between the various links is distance, so a pre-processing routine
was made that checks all ONT-splitter-OLT path combinations and sets the ONT-splitter connections that
do not meet the requirements to zero.
4.1.2 Maximum Differential Distance
The maximum differential distance is a constraint on the range of distances that ONTs can have to
the OLT. This is important because the further apart two ONTs are relative to the OLT, the harder it is for
the latter to perform ranging, power levelling and synchronization procedures. Recommendation G.984.2
defines the maximum differential logical reach at 20 km and the maximum differential optical path loss at
15 dB. Again, [17] included this information (for the logical reach) in the ILP itself. Here, because we
included a splitting stage at the CO, the “members” of the same PON are not clearly defined. That was in
fact the purpose, because an operator wants to have that kind of flexibility. For this purpose however,
each specific ONT is only allocated to a Junction Box, not to any PON. This means we cannot know the
differential distances before service is requested. A somewhat naive solution was implemented in this
case, by post-processing the solution. When the ILP is executed and the solution obtained, the PONs are
defined in the following way: each PON will successively spread its second level splitters by as many
Junction Boxes as possible. Since we cannot know when customers will require service and therefore
which splitter they will be connected to, the calculations are made for all the PONs that the ONTs have
access to, meaning the ones that have splitters in Junction Boxes where the ONTs are connected.
Basically we create virtual super-PONs that include every ONT that can possibly be connected to it and
check the differential distance and path loss. The final conclusion however was that the maximum
differential distance is too large to impact the scenarios studied (without any reach extension) and the
optical path loss is never an issue because the loss of a 1:64 splitting ratio (18 dB) alone is only 10 dB
short of the total 28 dB maximum path loss, so there cannot be a 15 dB difference when PONs use 1:64
ratios.
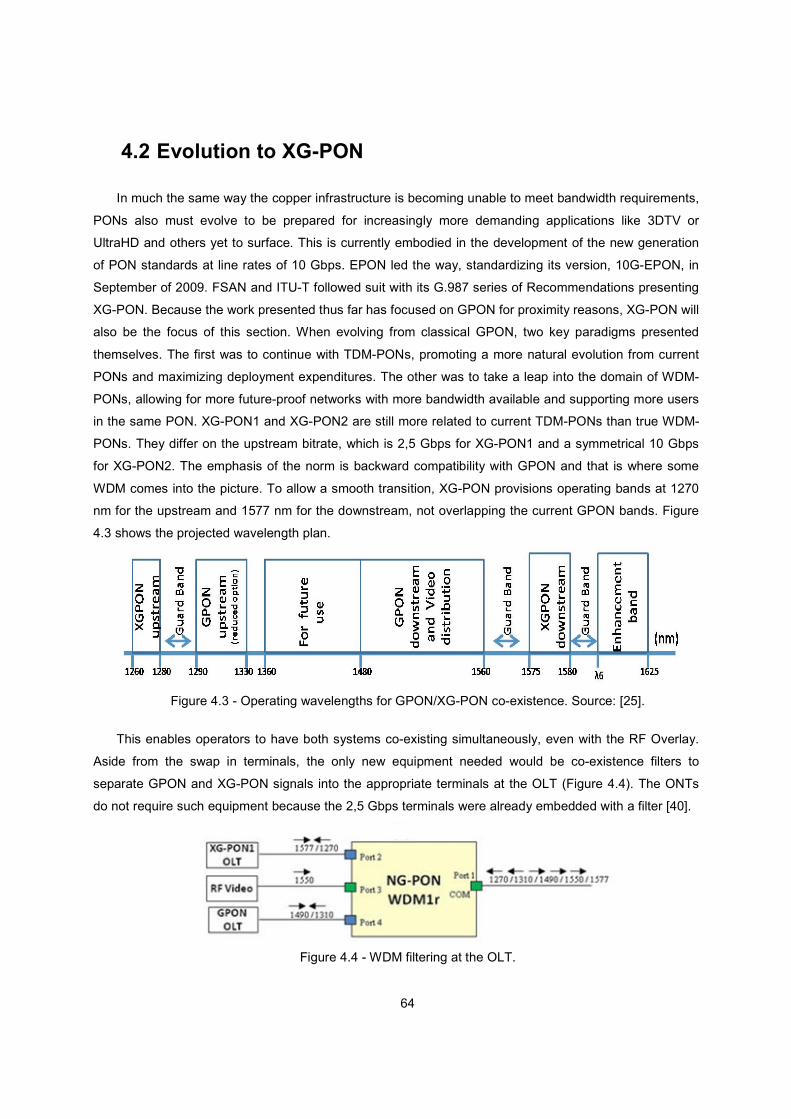
64
4.2 Evolution to XG-PON
In much the same way the copper infrastructure is becoming unable to meet bandwidth requirements,
PONs also must evolve to be prepared for increasingly more demanding applications like 3DTV or
UltraHD and others yet to surface. This is currently embodied in the development of the new generation
of PON standards at line rates of 10 Gbps. EPON led the way, standardizing its version, 10G-EPON, in
September of 2009. FSAN and ITU-T followed suit with its G.987 series of Recommendations presenting
XG-PON. Because the work presented thus far has focused on GPON for proximity reasons, XG-PON will
also be the focus of this section. When evolving from classical GPON, two key paradigms presented
themselves. The first was to continue with TDM-PONs, promoting a more natural evolution from current
PONs and maximizing deployment expenditures. The other was to take a leap into the domain of WDM-
PONs, allowing for more future-proof networks with more bandwidth available and supporting more users
in the same PON. XG-PON1 and XG-PON2 are still more related to current TDM-PONs than true WDM-
PONs. They differ on the upstream bitrate, which is 2,5 Gbps for XG-PON1 and a symmetrical 10 Gbps
for XG-PON2. The emphasis of the norm is backward compatibility with GPON and that is where some
WDM comes into the picture. To allow a smooth transition, XG-PON provisions operating bands at 1270
nm for the upstream and 1577 nm for the downstream, not overlapping the current GPON bands. Figure
4.3 shows the projected wavelength plan.
Figure 4.3 - Operating wavelengths for GPON/XG-PON co-existence. Source: [25].
This enables operators to have both systems co-existing simultaneously, even with the RF Overlay.
Aside from the swap in terminals, the only new equipment needed would be co-existence filters to
separate GPON and XG-PON signals into the appropriate terminals at the OLT (Figure 4.4). The ONTs
do not require such equipment because the 2,5 Gbps terminals were already embedded with a filter [40].
Figure 4.4 - WDM filtering at the OLT.
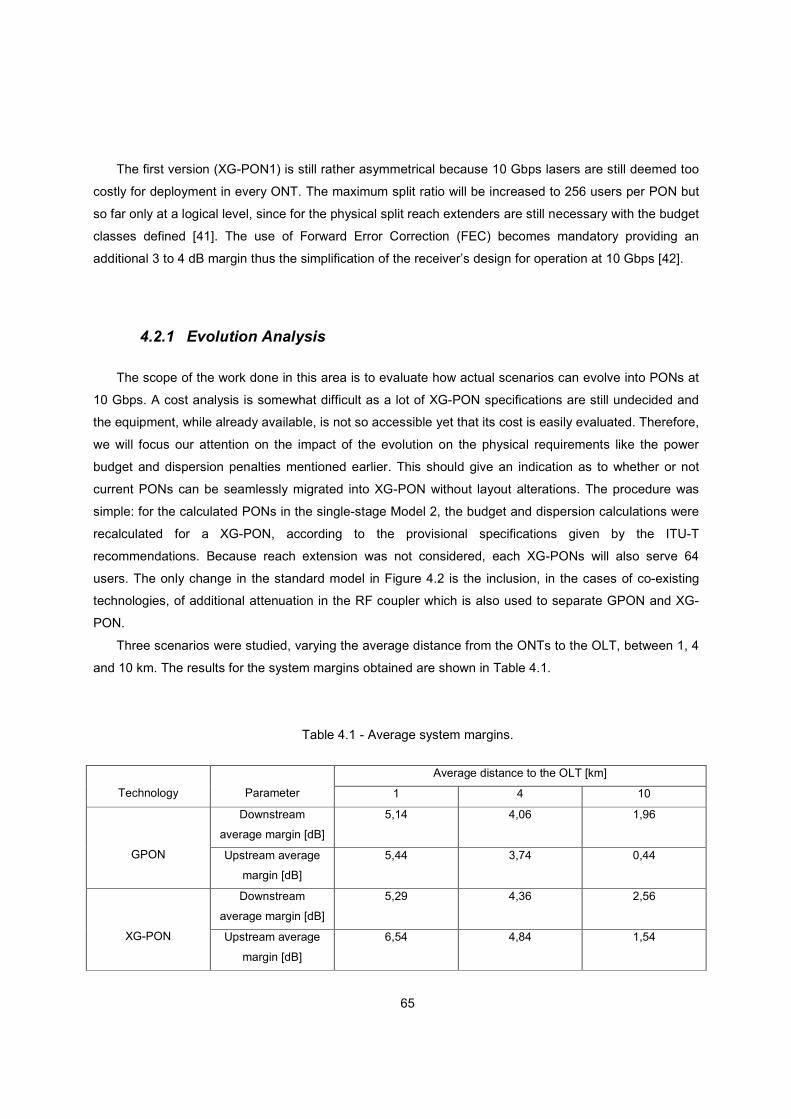
65
The first version (XG-PON1) is still rather asymmetrical because 10 Gbps lasers are still deemed too
costly for deployment in every ONT. The maximum split ratio will be increased to 256 users per PON but
so far only at a logical level, since for the physical split reach extenders are still necessary with the budget
classes defined [41]. The use of Forward Error Correction (FEC) becomes mandatory providing an
additional 3 to 4 dB margin thus the simplification of the receiver’s design for operation at 10 Gbps [42].
4.2.1 Evolution Analysis
The scope of the work done in this area is to evaluate how actual scenarios can evolve into PONs at
10 Gbps. A cost analysis is somewhat difficult as a lot of XG-PON specifications are still undecided and
the equipment, while already available, is not so accessible yet that its cost is easily evaluated. Therefore,
we will focus our attention on the impact of the evolution on the physical requirements like the power
budget and dispersion penalties mentioned earlier. This should give an indication as to whether or not
current PONs can be seamlessly migrated into XG-PON without layout alterations. The procedure was
simple: for the calculated PONs in the single-stage Model 2, the budget and dispersion calculations were
recalculated for a XG-PON, according to the provisional specifications given by the ITU-T
recommendations. Because reach extension was not considered, each XG-PONs will also serve 64
users. The only change in the standard model in Figure 4.2 is the inclusion, in the cases of co-existing
technologies, of additional attenuation in the RF coupler which is also used to separate GPON and XG-
PON.
Three scenarios were studied, varying the average distance from the ONTs to the OLT, between 1, 4
and 10 km. The results for the system margins obtained are shown in Table 4.1.
Table 4.1 - Average system margins.
Technology
Parameter
Average distance to the OLT [km]
1 4 10
GPON
Downstream
average margin [dB]
5,14 4,06 1,96
Upstream average
margin [dB]
5,44 3,74 0,44
XG-PON
Downstream
average margin [dB]
5,29 4,36 2,56
Upstream average
margin [dB]
6,54 4,84 1,54
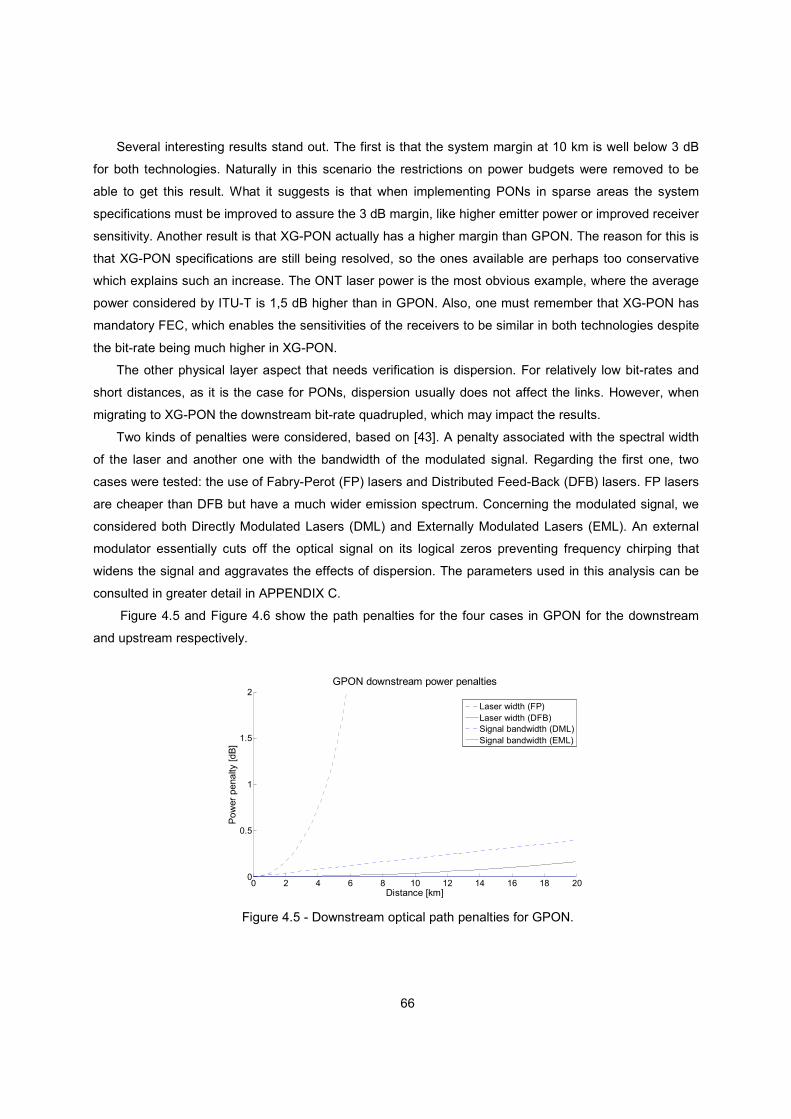
66
Several interesting results stand out. The first is that the system margin at 10 km is well below 3 dB
for both technologies. Naturally in this scenario the restrictions on power budgets were removed to be
able to get this result. What it suggests is that when implementing PONs in sparse areas the system
specifications must be improved to assure the 3 dB margin, like higher emitter power or improved receiver
sensitivity. Another result is that XG-PON actually has a higher margin than GPON. The reason for this is
that XG-PON specifications are still being resolved, so the ones available are perhaps too conservative
which explains such an increase. The ONT laser power is the most obvious example, where the average
power considered by ITU-T is 1,5 dB higher than in GPON. Also, one must remember that XG-PON has
mandatory FEC, which enables the sensitivities of the receivers to be similar in both technologies despite
the bit-rate being much higher in XG-PON.
The other physical layer aspect that needs verification is dispersion. For relatively low bit-rates and
short distances, as it is the case for PONs, dispersion usually does not affect the links. However, when
migrating to XG-PON the downstream bit-rate quadrupled, which may impact the results.
Two kinds of penalties were considered, based on [43]. A penalty associated with the spectral width
of the laser and another one with the bandwidth of the modulated signal. Regarding the first one, two
cases were tested: the use of Fabry-Perot (FP) lasers and Distributed Feed-Back (DFB) lasers. FP lasers
are cheaper than DFB but have a much wider emission spectrum. Concerning the modulated signal, we
considered both Directly Modulated Lasers (DML) and Externally Modulated Lasers (EML). An external
modulator essentially cuts off the optical signal on its logical zeros preventing frequency chirping that
widens the signal and aggravates the effects of dispersion. The parameters used in this analysis can be
consulted in greater detail in APPENDIX C.
Figure 4.5 and Figure 4.6 show the path penalties for the four cases in GPON for the downstream
and upstream respectively.
Figure 4.5 - Downstream optical path penalties for GPON.
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2GPON downstream power penalties
Distance [km]
Po
wer
pe
nalty
[d
B]
Laser width (FP)Laser width (DFB)Signal bandwidth (DML)Signal bandwidth (EML)
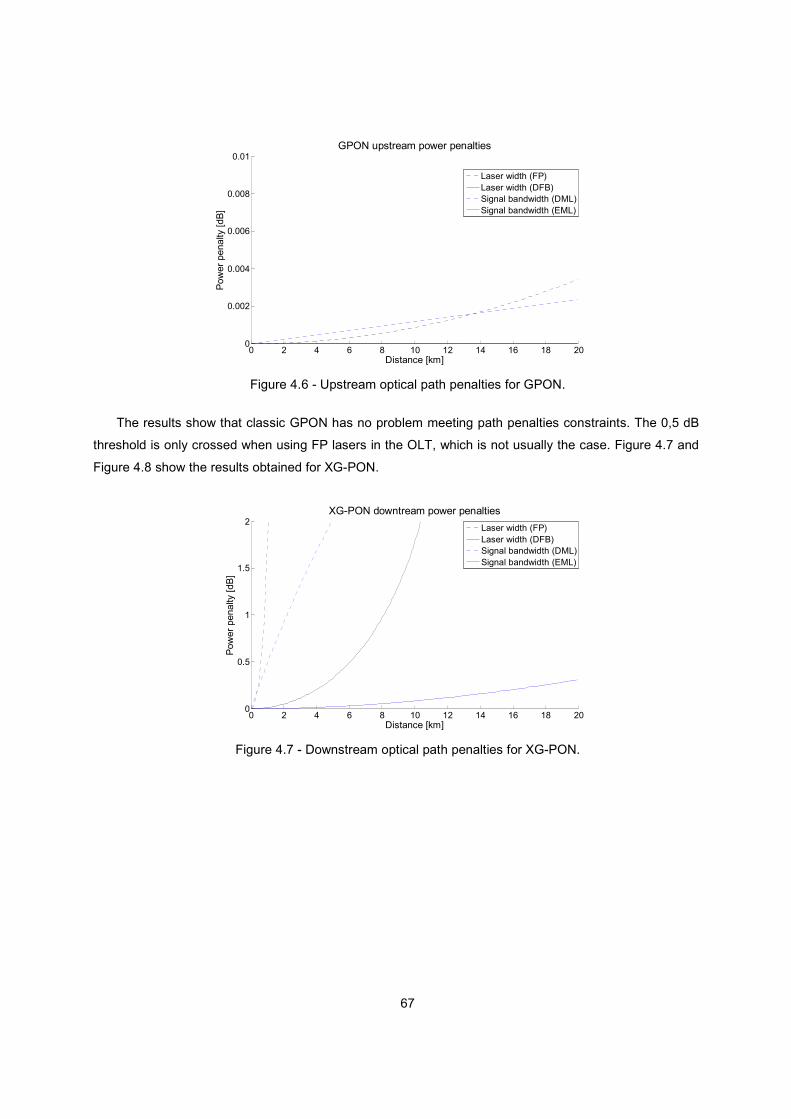
67
Figure 4.6 - Upstream optical path penalties for GPON.
The results show that classic GPON has no problem meeting path penalties constraints. The 0,5 dB
threshold is only crossed when using FP lasers in the OLT, which is not usually the case. Figure 4.7 and
Figure 4.8 show the results obtained for XG-PON.
Figure 4.7 - Downstream optical path penalties for XG-PON.
0 2 4 6 8 10 12 14 16 18 200
0.002
0.004
0.006
0.008
0.01GPON upstream power penalties
Distance [km]
Pow
er p
ena
lty [d
B]
Laser width (FP)Laser width (DFB)Signal bandwidth (DML)Signal bandwidth (EML)
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2XG-PON downtream power penalties
Distance [km]
Pow
er p
ena
lty [d
B]
Laser width (FP)Laser width (DFB)Signal bandwidth (DML)Signal bandwidth (EML)
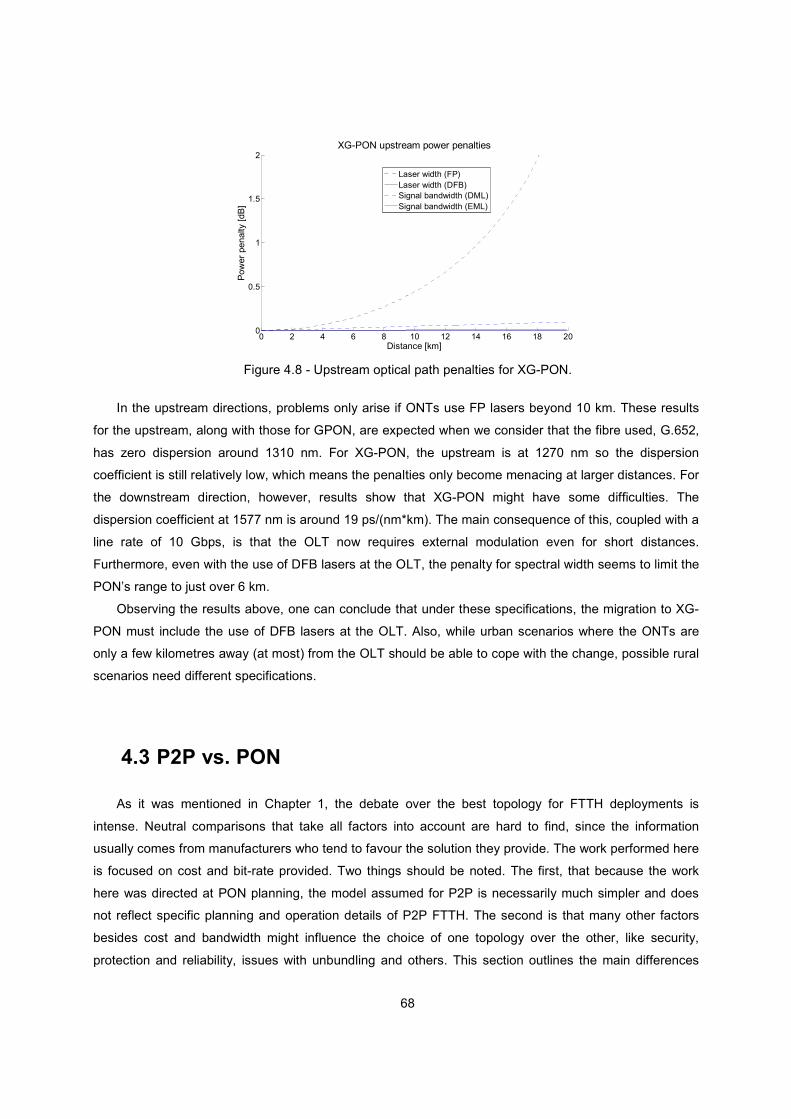
68
Figure 4.8 - Upstream optical path penalties for XG-PON.
In the upstream directions, problems only arise if ONTs use FP lasers beyond 10 km. These results
for the upstream, along with those for GPON, are expected when we consider that the fibre used, G.652,
has zero dispersion around 1310 nm. For XG-PON, the upstream is at 1270 nm so the dispersion
coefficient is still relatively low, which means the penalties only become menacing at larger distances. For
the downstream direction, however, results show that XG-PON might have some difficulties. The
dispersion coefficient at 1577 nm is around 19 ps/(nm*km). The main consequence of this, coupled with a
line rate of 10 Gbps, is that the OLT now requires external modulation even for short distances.
Furthermore, even with the use of DFB lasers at the OLT, the penalty for spectral width seems to limit the
PON’s range to just over 6 km.
Observing the results above, one can conclude that under these specifications, the migration to XG-
PON must include the use of DFB lasers at the OLT. Also, while urban scenarios where the ONTs are
only a few kilometres away (at most) from the OLT should be able to cope with the change, possible rural
scenarios need different specifications.
4.3 P2P vs. PON
As it was mentioned in Chapter 1, the debate over the best topology for FTTH deployments is
intense. Neutral comparisons that take all factors into account are hard to find, since the information
usually comes from manufacturers who tend to favour the solution they provide. The work performed here
is focused on cost and bit-rate provided. Two things should be noted. The first, that because the work
here was directed at PON planning, the model assumed for P2P is necessarily much simpler and does
not reflect specific planning and operation details of P2P FTTH. The second is that many other factors
besides cost and bandwidth might influence the choice of one topology over the other, like security,
protection and reliability, issues with unbundling and others. This section outlines the main differences
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2XG-PON upstream power penalties
Distance [km]
Pow
er p
enal
ty [d
B]
Laser width (FP)Laser width (DFB)Signal bandwidth (DML)Signal bandwidth (EML)
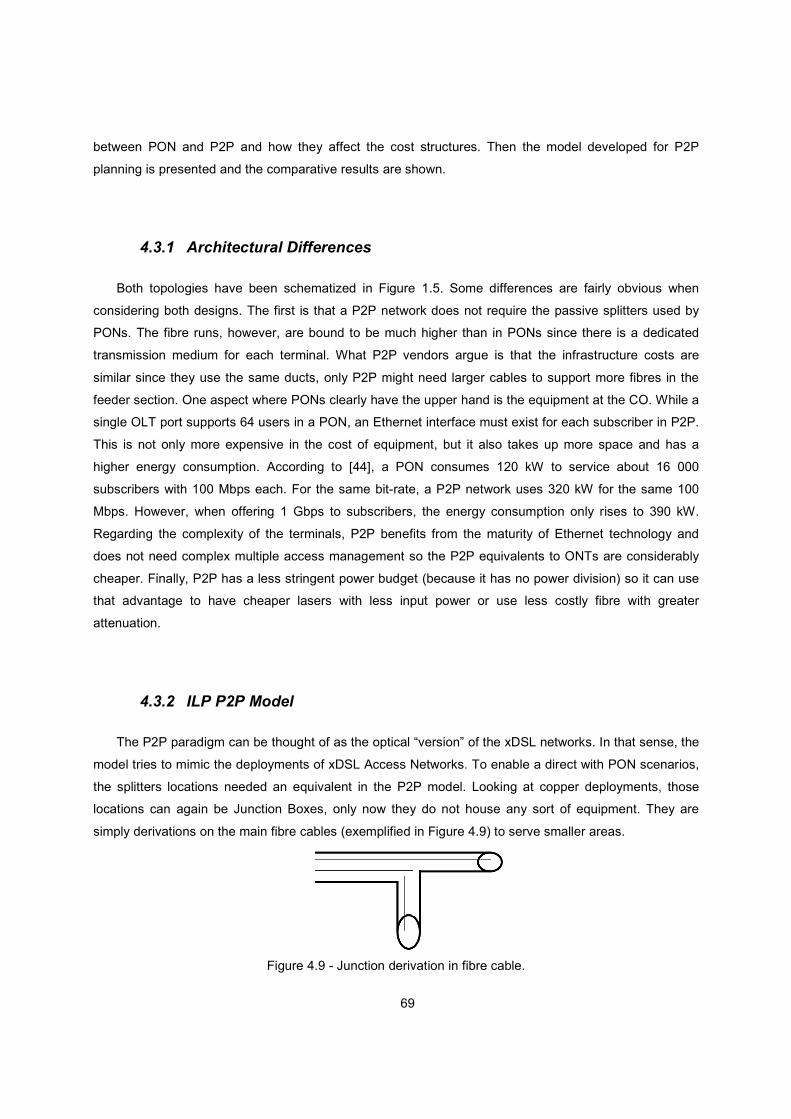
69
between PON and P2P and how they affect the cost structures. Then the model developed for P2P
planning is presented and the comparative results are shown.
4.3.1 Architectural Differences
Both topologies have been schematized in Figure 1.5. Some differences are fairly obvious when
considering both designs. The first is that a P2P network does not require the passive splitters used by
PONs. The fibre runs, however, are bound to be much higher than in PONs since there is a dedicated
transmission medium for each terminal. What P2P vendors argue is that the infrastructure costs are
similar since they use the same ducts, only P2P might need larger cables to support more fibres in the
feeder section. One aspect where PONs clearly have the upper hand is the equipment at the CO. While a
single OLT port supports 64 users in a PON, an Ethernet interface must exist for each subscriber in P2P.
This is not only more expensive in the cost of equipment, but it also takes up more space and has a
higher energy consumption. According to [44], a PON consumes 120 kW to service about 16 000
subscribers with 100 Mbps each. For the same bit-rate, a P2P network uses 320 kW for the same 100
Mbps. However, when offering 1 Gbps to subscribers, the energy consumption only rises to 390 kW.
Regarding the complexity of the terminals, P2P benefits from the maturity of Ethernet technology and
does not need complex multiple access management so the P2P equivalents to ONTs are considerably
cheaper. Finally, P2P has a less stringent power budget (because it has no power division) so it can use
that advantage to have cheaper lasers with less input power or use less costly fibre with greater
attenuation.
4.3.2 ILP P2P Model
The P2P paradigm can be thought of as the optical “version” of the xDSL networks. In that sense, the
model tries to mimic the deployments of xDSL Access Networks. To enable a direct with PON scenarios,
the splitters locations needed an equivalent in the P2P model. Looking at copper deployments, those
locations can again be Junction Boxes, only now they do not house any sort of equipment. They are
simply derivations on the main fibre cables (exemplified in Figure 4.9) to serve smaller areas.
Figure 4.9 - Junction derivation in fibre cable.

70
Optimizing networks in this context does not make as much sense as it does for PONs because there
is no aggregation point. To have a clear comparison, the model was developed under the assumption that
the possible locations for Junction Boxes are now the possible locations for derivations. In reality, a
derivation is easier to install because in theory it will not require further access to it like splitters might.
The capacity constraint considered was the maximum number of fibres reaching or leaving a single
derivation. This suffers from the same problem as the PON formulation because it does not account for
paths between derivations and terminals being shared with other paths along the way (because a linear
model cannot know them beforehand). The model for P2P networks can be defined with the following
parameters, for � ONTs and � possible derivation sites:
� - Cost of connecting ONTs in building � to derivation �; ! - Cost of placing a derivation at location �; - Cost of connecting derivations between � and �; � - Maximum number of fibres in path between � and �; � - Very small number to guarantee coherent constraints;
�G - Number of fibre connections (ONTs) in building �.
The integrality conditions correspond to:
I � 2�� h/!%!��0��� !%�n�"�� ��"�'���"�� ��k.� j"/!%$�0!k 1 (4.4)
Furthermore, variables �� � � � �� and denote the number of fibres between each connection.
The objective function is:
������ ? ��
���� ���! ? I
�
���� ���� ? �
�
��v�
�
��
�
�� (4.5)
Subject to:
�� � �G ������� � ��� � ��
�� (4.6)
�� � ��[ ����
��v
�
[��
�
��v������� � ��� � � (4.7)
� � � ������ � �����k �� � .� � �� (4.8)
I � � ������� � �� � ���k �� � .�� �� (4.9)
I� S ����������� � � ��� �� (4.10)
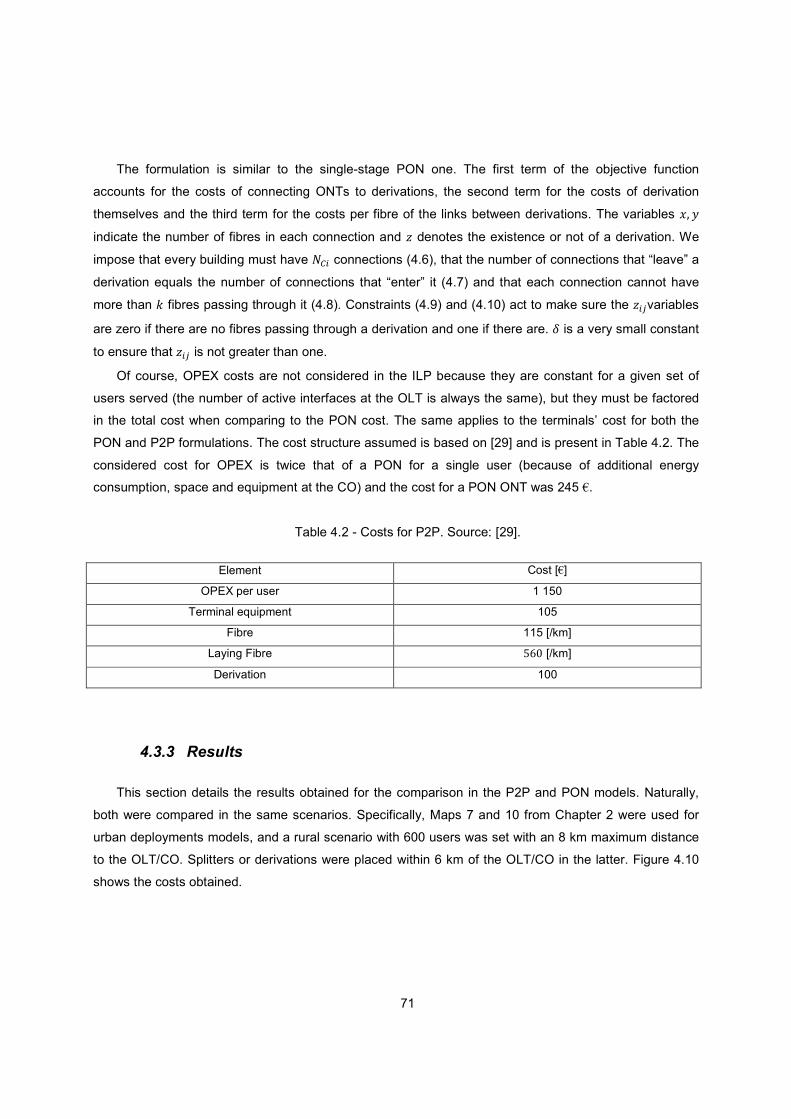
71
The formulation is similar to the single-stage PON one. The first term of the objective function
accounts for the costs of connecting ONTs to derivations, the second term for the costs of derivation
themselves and the third term for the costs per fibre of the links between derivations. The variables �� �
indicate the number of fibres in each connection and I denotes the existence or not of a derivation. We
impose that every building must have �G connections (4.6), that the number of connections that “leave” a
derivation equals the number of connections that “enter” it (4.7) and that each connection cannot have
more than � fibres passing through it (4.8). Constraints (4.9) and (4.10) act to make sure the Ivariables
are zero if there are no fibres passing through a derivation and one if there are. � is a very small constant
to ensure that I is not greater than one.
Of course, OPEX costs are not considered in the ILP because they are constant for a given set of
users served (the number of active interfaces at the OLT is always the same), but they must be factored
in the total cost when comparing to the PON cost. The same applies to the terminals’ cost for both the
PON and P2P formulations. The cost structure assumed is based on [29] and is present in Table 4.2. The
considered cost for OPEX is twice that of a PON for a single user (because of additional energy
consumption, space and equipment at the CO) and the cost for a PON ONT was 245 €.
Table 4.2 - Costs for P2P. Source: [29].
Element Cost [€]
OPEX per user 1 150
Terminal equipment 105
Fibre 115 [/km]
Laying Fibre ]\. [/km]
Derivation 100
4.3.3 Results
This section details the results obtained for the comparison in the P2P and PON models. Naturally,
both were compared in the same scenarios. Specifically, Maps 7 and 10 from Chapter 2 were used for
urban deployments models, and a rural scenario with 600 users was set with an 8 km maximum distance
to the OLT/CO. Splitters or derivations were placed within 6 km of the OLT/CO in the latter. Figure 4.10
shows the costs obtained.
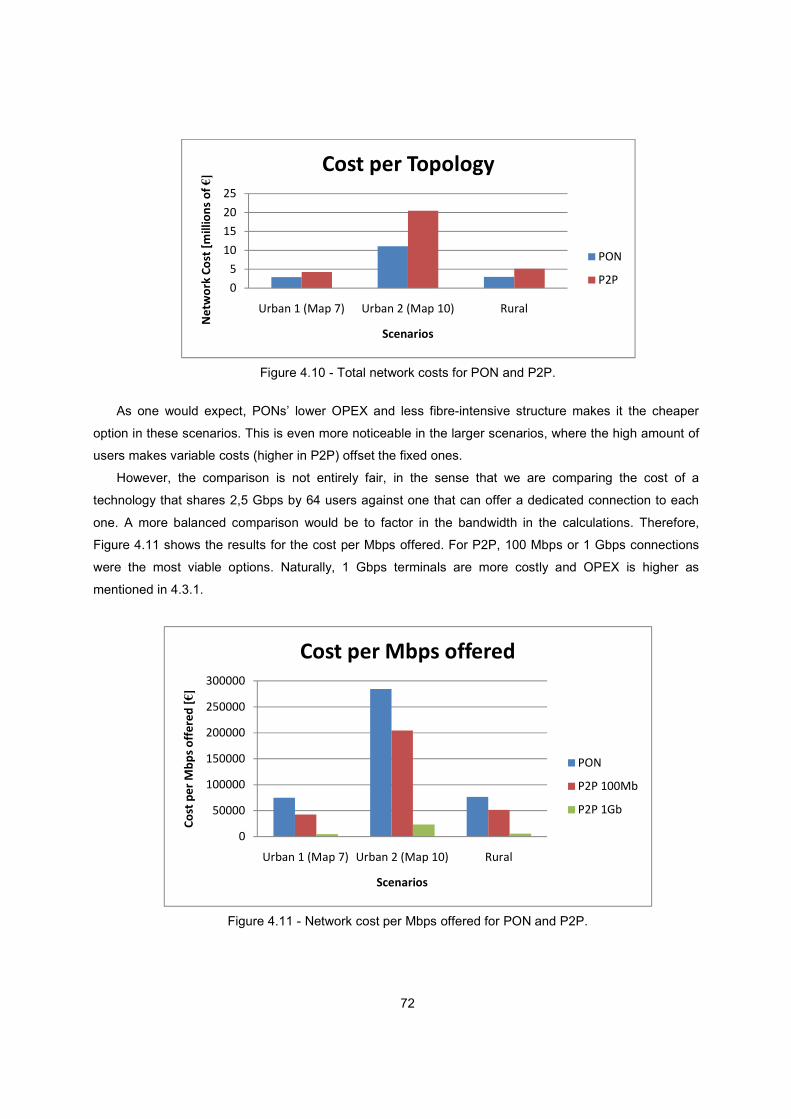
72
Figure 4.10 - Total network costs for PON and P2P.
As one would expect, PONs’ lower OPEX and less fibre-intensive structure makes it the cheaper
option in these scenarios. This is even more noticeable in the larger scenarios, where the high amount of
users makes variable costs (higher in P2P) offset the fixed ones.
However, the comparison is not entirely fair, in the sense that we are comparing the cost of a
technology that shares 2,5 Gbps by 64 users against one that can offer a dedicated connection to each
one. A more balanced comparison would be to factor in the bandwidth in the calculations. Therefore,
Figure 4.11 shows the results for the cost per Mbps offered. For P2P, 100 Mbps or 1 Gbps connections
were the most viable options. Naturally, 1 Gbps terminals are more costly and OPEX is higher as
mentioned in 4.3.1.
Figure 4.11 - Network cost per Mbps offered for PON and P2P.
0
5
10
15
20
25
Urban 1 (Map 7) Urban 2 (Map 10) Rural
Ne
two
rk C
ost
[m
illi
on
s o
f €]
Scenarios
Cost per Topology
PON
P2P
0
50000
100000
150000
200000
250000
300000
Urban 1 (Map 7) Urban 2 (Map 10) Rural
Co
st p
er
Mb
ps
off
ere
d [€]
Scenarios
Cost per Mbps offered
PON
P2P 100Mb
P2P 1Gb

73
The picture changes dramatically. Factoring in available bandwidth, P2P is less expensive on a per
bit basis, because a GPON can provide at best 39Mbps to each user (with a 1:64 ratio). The cost per bit
for 1 Gbps is much lower than the alternatives, although perhaps market needs do not yet justify 1 Gbps
in the access.
4.4 Summary
The physical layer constraints of PONs were presented and implemented into the model. Results
showed that the power budget constrains the usual PON specifications when going beyond the 10km
mark for GPON. For XG-PON, results show that power requirements are met in much the same way as
GPON, albeit the specifications given by the ITU-T standard are still in study and refer to more
sophisticated and expensive equipment. The use of FEC provides a crucial assistance in meeting the
budget requirements. Regarding the effects of dispersion, while they are almost negligible in GPON, the
current specifications of XG-PON require externally modulated lasers to stay below the maximum path
penalty and PONs with wider ranges should need additional specifications to meet the requirements.
A comparison of P2P and PON topologies was also presented. The main differences were outlined
and a simple P2P ILP model was presented to allow a cost comparison with PON. Results show that
while PONs are considerably cheaper to deploy, on a per Mbps offered basis, P2P solutions (particularly
1 Gb Ethernet) are more efficient.
74
5. Conclusions and Future Work
This Chapter reflects on the work conducted in the framework of this Thesis, and the way it can
contribute for further development of the relevant areas it addresses. It also discusses possible paths in
which the work presented here can be continued, either by continuously improving the methodologies
presented or by extending their application range to adjacent areas.
75
5.1 General Conclusions
The objectives of this Thesis were summarized in Chapter 1 as comprising three main objectives. The
first was to develop an ILP model for PON planning and assess its practicality. It was shown in Chapter 2
that the CLP can, with today’s computational power, be used to solve problems with several hundred
terminals and a few dozen concentrators. This problem was then applied to PON planning with coherent
results. The alterations made to the model allowed not only to better relate it to the challenges facing an
operator deploying a PON (like OPEX and the take-rate) but also to extend the model’s range to several
thousand users per scenario, when considering concentrated urban deployments. The model deviates
from the usual approaches in the area in the sense that it does not perform best path calculations for the
PON elements, rather it optimizes the allocation and placement of splitters in PONs. For the scenarios
where the formulation takes too much time to respond, the heuristics tested achieve good results quickly.
The second objective was to develop an ILP model for multi-staged PONs. This was probably the
most original contribution of this Thesis, as no comparable approach could be found in the literature. The
proposed model enables a great degree of flexibility as it allows any kind of connections between splitters
(while complying with PON requirements) and any desired number of splitting stages. However, as often
is the case with ILP models, it is still too complex for regular computational power, allowing only optimal
scenarios for relatively small networks. It did however show the potential benefits of using such an
architecture against a single-stage design. The proposed heuristic achieved coherent results although its
overall performance needs some benchmarking.
The third objective related to analyzing the evolution of current GPON to XG-PON and comparing
PON topologies with P2P ones. The results show that with current specifications for XG-PON, the
migration is possible for PONs spanning less than 6 km if external modulation is applied at the OLT laser.
Regarding the topological analysis, results suggest that current PONs are cheaper to deploy but cost
more on a per bit offered basis.
5.2 Future Work
The work presented here, being either the application of classical algorithms to a new reality (PONs)
or the development of a brand new model (for multi-stage PONs), was relatively new and over a
considerable array of issues. Therefore, it is only natural that many of the methods and models used can
be perfected to achieve improvements in both the output results and the performance of the algorithms.
In the case of the single-stage formulation, a more interesting end-to-end solution could be achieved
by interfacing the model with path-calculation programs (such as the one described in [15]) to better
account for conduit sharing for instance. Also, it should be investigated whether the single-stage

76
formulation can be modified to allow different first-stage splitting ratios in the same network without
making it too complex. Modifications could also attempt to mimic the distributed-split architecture, possibly
by co-locating splitter locations with building locations.
For the multi-stage model, the work presented was a first approach to the problem, which opens
many possibilities for further developing it. First of all, more advanced techniques should be studied in
order to attempt to lower the running times of the model and get results for larger networks. A more
complex relaxation procedure could be employed, or the settings of the Branch & Bound procedure could
be optimized (like a heuristic procedure to select which solution branches to check first and with which
values). Also, simplifications of the model could be tested, like limiting the configurations (in the number
of levels allowed for instance). The heuristic developed for two-stage PONs has room for improvement,
starting by expanding it to allow more than two levels. More complex verification stages in the reallocation
procedures were tried without success, but it is still an open problem.
Regarding the work in Chapter 4, it is more of a closed analysis rather than an evolving model or
algorithm. However, the underlying methodology can be used with more accurate data. This is most
evident in the case of XG-PON, where the costs of the equipment would allow a cost estimate of evolving
the networks. Also for the case of XG-PON, when the final specifications are ratified a more conclusive
analysis can be conducted on the feasibility of seamless migration scenarios.
In a more general note, the models presented should allow the simulation of future optical access
networks, like WDM-PONs, with minimal adaptations to their structure. Other aspects could also be
introduced, such as protection schemes in PONs, by changing the constraints to allow more than one
connection per ONT and force those connections to go through geographically separate Junction Boxes.
77
References
[1] K. G. Coffman and A. M. Odlyzko. (1998) The Size and Growth Rate of the Internet. [Online].
http://www.dtc.umn.edu/~odlyzko/doc/internet_size.pdf
[2] G. Agrawal, Fiber-Optic Communication Systems, 3rd ed.: Wiley & Sons Inc., 2002.
[3] P. Green, Fiber to the Home: The New Empowerment.: Wiley & Sons Inc., 2005.
[4] ITU-T Recommendation G.993.2, Very High Speed Digital Subscriber Line Transceivers 2
(VDSL2), 2006.
[5] O. Hammer. (2008, January) How Big is the VDSL Market? [Online].
http://seekingalpha.com/article/59668-jkanos-communications-how-big-is-the-vdsl-market-part-iii
[6] (2008) AON Vs. PON - A comparison of two access network technologies and the different
impact on operations. [Online].
http://www.eurocomms.com/asset/583/AON%20vs.%20PON%20%28White%20Paper%29.pdf
[7] L., Chen, J. Wosinska, "How much to pay for protection in fiber access networks: Cost and
reliability tradeoff," in IEEE 3rd International Symposium on Advanced Networks and
Telecommunication Systems, 2009, pp. 1-3.
[8] J. Weingart. (2007) Metro Ethernet Forum. [Online].
http://www.metroethernetforum.org/PPT_Documents/FTTxMEF070620.ppt
[9] J. Pires, "Redes de Acesso Ópticas," ISCTE, Seminário sobre Redes Ópticas de Nova
Geração. 2009.
[10] ITU-T Recommendation G.983.1, Broadband optical access systems based on Passive Optical
Networks (PON), 2005.
[11] (2010, September) PON market to reach $7.62bn in five years. [Online].
http://www.ciol.com/Technology/Networking/News-Reports/PON-market-to-reach-$762bn-in-
five-years/8210131129/0/
[12] J. G. Klincewicz, "Hub location in backbone/tributary network design: a review," Location
Science, vol. 6, pp. 307-335, 1998.
[13] R. R. Boorstyn and H. Frank, "Large-Scale Network Topological Optimization," IEEE
Transactions on Communications, vol. 25, no. 1, pp. 29-47, January 1977.
[14] E. Bonsma, N. Karunatillake, R. Shipman, M. Shackleton, and D. Mortimore, "Evolving
Greenfield Passive Optical Networks," BT Technology Journal, vol. 21, no. 4, 2003.
[15] B. Lakic, "PON Builder: Automated Planning of a Passive Optical Network," University of
Coimbra, Faculty of Sciences and Technology, Master's Thesis in Electrical and Computer
Engineering. 2008.
78
[16] B. Lakic and M. Hajduczenia, "On optimized Passive Optical Network (PON) deployment," in
Second International Conference on Access Networks, 2007, pp. 1-8.
[17] J. Li and G. Shen, "Cost Minimization Planning for Greenfield Passive Optical Networks,"
Journal of Optical Communications and Networking, vol. 1, no. 1, pp. 17-29, 2009.
[18] Telcordia Technologies, Inc. Telcordia Network Engineer. [Online].
http://www.telcordia.com/collateral/brochures/net_engineer.pdf
[19] Nokia Corporation. Nokia Netact Planner. [Online].
http://sysdoc.doors.ch/NOKIA/nokia_netact_planner.pdf
[20] D. Luenberger and Y. Ye, Linear and Nonlinear Programming, 3rd ed.: Springer, 2008.
[21] M. Trick. (1998) A Tutorial on Integer Programming. [Online].
http://mat.gsia.cmu.edu/orclass/integer/integer.html
[22] M. Berkelaar, K. Eikland, and P. Notebaert. (2004, May) lpsolve: Open source (Mixed-Integer)
Linear Programming system. [Online]. http://lpsolve.sourceforge.net/5.5/
[23] B. Perkins, "Optimal Splitter Placement in PONs," Bechtel Telecommunications Technical
Journal, September 2004.
[24] G. Schnick. (2007, April) Corning Cable Systems. [Online].
catalog2.corning.com/CorningCableSystems/./EVO-745-EN.pdf
[25] J. Salgado, P. Mão-Cheia, C. Rodrigues, M. Bernardo, and J. Figueiredo, "Evolution of Access
Networks from GPON to XGPON to WDM-PON from operator point of view," in 15th European
Conference on Networks and Optical Communications, 2010.
[26] A. Costa, Juntas e Conectores Ópticos, Faculdade de Engenharia da Universidade do Porto.
[27] J. Pearl, Heuristics: Intelligent Search Strategies for Computer Problem Solving.: Addison-
Wesley, 1983.
[28] J. Matousek and B. Gartner, "Integer Programming and LP Relaxation," in Understanding and
using Linear Programming.: Springer, 2007, ch. 3, pp. 29-40.
[29] J. Chen, L. Wosinska, C. Machuca, and M. Jaeger, "Cost vs. reliability performance study of
fiber access network architectures," IEEE Communications Magazine, vol. 48, no. 2, pp. 56-65,
2010.
[30] J. L. Riding, J. C. Ellershaw, A. V. Tran, L. J. Guan, and T. Smith, "Economics of broadband
access technologies for rural areas," in Conference on Optical Fiber Communication, 2009, pp.
1-3.
[31] N. J. Frigo, "A View of Fiber to the Home Economics," IEEE Communications Magazine, vol. 42,
no. 8, pp. 16-23, 2004.
79
[32] I.B. Heard, "Availability and cost estimation of secured FTTH architectures," in International
Conference on Optical Network Design and Modeling, 2008.
[33] L. Wosinska, "Impact of Protection Mechanisms on Cost in PONs," in 11th International
Conference on Transparent Optical Networks, 2009.
[34] G. Schneider and M. Zastrow, "An algorithm for the design of multilevel concentrator networks,"
Computer Science (1976), vol. 6, no. 1, pp. 1-11, February 1982.
[35] P. McGregor and D. Shen, "Network design: an algorithm for the access facility location
problem," IEEE Transactions on Communications, vol. 25, no. 1, pp. 61-73, 1977.
[36] S. Narasimhan and H. Pirkul, "Hierarchical concentrator location problem," Computer
Communications, vol. 15, pp. 185-191, 1992.
[37] J. Chinneck. (2010) Practical Optimization: A Gentle Introduction - Chapter 12: Integer/Discrete
Programming via Branch and Bound. [Online].
http://www.sce.carleton.ca/faculty/chinneck/po/Chapter12.pdf
[38] G. Keiser, FTTx Concepts and Applications.: Wiley & Sons, 2006.
[39] ITU-T Recommendation G.984.2 (Ammendment I), Industry best practice for 2.488 Gbit/s
downstream, 1.244 Gbit/s upstream G-PON , 2006.
[40] F. Bougart, "Optical Access Transmission: XG-PON system aspects," in FTTH Conference,
Lisbon, 2010.
[41] G.987.1 ITU-T Recommendation, 10-Gigabit-capable passive optical networks (XG-PON):
General requirements , 2010.
[42] G.987.2 ITU-T Recommendation, Ten gigabit-capable passive optical networks: Physical
dependent layer specifications, 2010.
[43] A. Cartaxo, "Transmissão por fibra óptica," 2005.
[44] C. Lange and A. Gladisch, "On the Energy Consumption of FTTH Access Networks," in
Conference on Optical Fiber Communication, 2009, pp. 1-3.
[45] D. Sala. (2001) Broadcom. [Online]. http://wwwcsif.cs.ucdavis.edu/~kramer/code/pcktsize.html
[46] M. Hajduczenia, H. Silva, and P. Monteiro, "On efficiency of Ethernet Passive Optical Networks
(EPONs)," in 11th IEEE Symposium on Computers and Communications, 2006, pp. 566-571.
[47] G. Kramer, "Ethernet PON (EPON): Design and Analysis of an Optical Access Network," 2000.
[48] Cisco Systems Inc. (2008) Understanding Data Throughput in a DOCSIS World.
[49] G.987.2 ITU-T Recommendation, Ten gigabit-capable passive optical networks: Physical
dependent layer specifications, 2010.
[50] G.652 ITU-T Recommendation, Characteristics of a single-mode fibre and cable, 2009.
[51] Corning Incorporated. (2010) Corning ClearCurve ZBL Optical Fiber. [Online].

80
http://www.corning.com/WorkArea/showcontent.aspx?id=34163
81
A. Efficiency of Fixed Access
Networks
This Appendix includes a comparative study between PON (EPON and GPON) and HFC networks as
to how much throughput they can offer to their respective subscribers. To do so, not only the architectural
concepts must be analyzed but also the logical protocols that implement them should be taken into
account as they inevitably introduce inefficiencies into the communication process.
A.1 Overview
When assessing the bit-rate that a given technology can offer to a subscriber, the marketed value
can’t always be taken for granted. Several factors condition each specific connection. In the analysis
conducted here, misconceptions arise easily because we’re about to look into three technologies
(EPON,GPON and HFC) that have a point-to-multipoint structure, that is, where the aggregated bit-rate of
the network is to be shared among a group of users. Thus, not only is the bit-rate itself shared, but there
must also be a protocol for handling access to the transmission medium. HFC networks were the first to
be faced with this problem on a large scale, so the term Dynamic Bandwidth Allocation (DBA) that refers
to the control algorithm for managing allocation of resources to individual users first came to prominence
in CATV networks. The DOCSIS class of protocols extensively describes the operation of these
algorithms. Its service classes model, used to prioritize different service types (voice usually has priority
over data for instance) has been reused in modified in many variants for networks that require (usually
upstream) multiple access contention (WiMax is a notable example). GPON also borrows heavily from
this model, as we’ll see ahead.
The comparison performed here aims to understand how the control protocols affect the efficiency of
the network, by checking how much of the bit-rate is dedicated to operating the network instead of
transmitting user content. To do so, we’ll look into the specifications of GPON and EPON protocols. For
HFC networks the analysis won’t be so in depth in the logical component for reasons elaborated in the
relevant section.
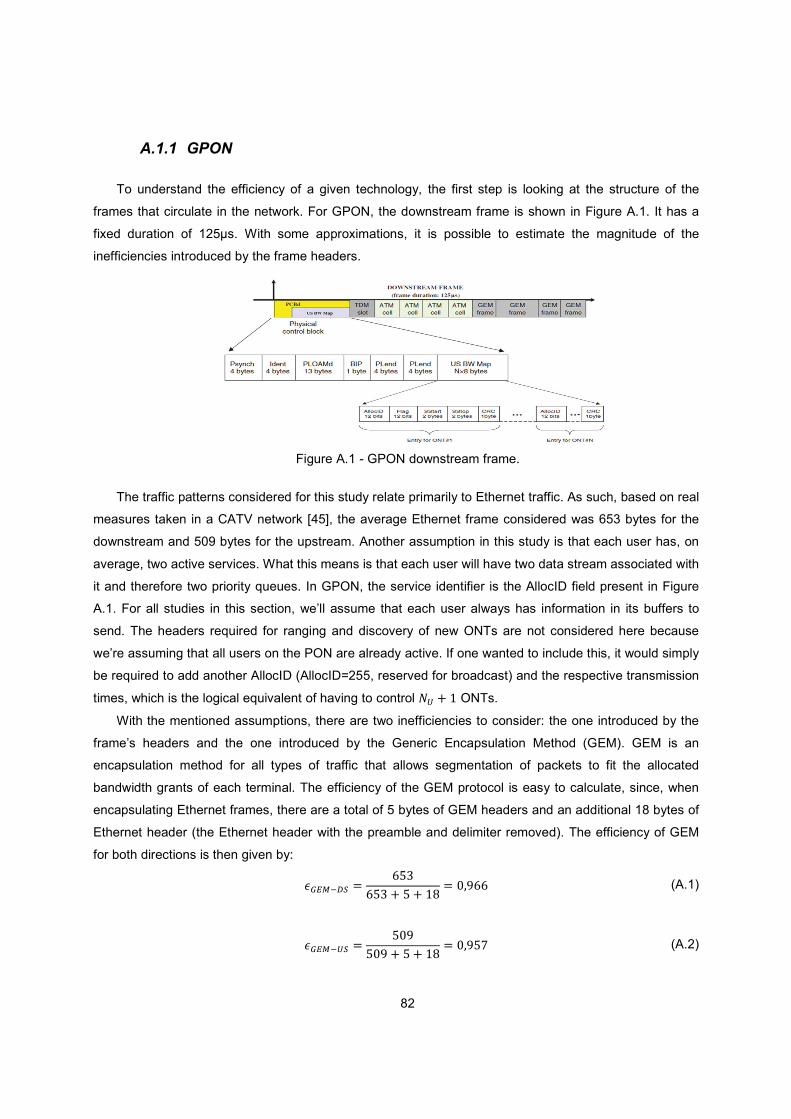
82
A.1.1 GPON
To understand the efficiency of a given technology, the first step is looking at the structure of the
frames that circulate in the network. For GPON, the downstream frame is shown in Figure A.1. It has a
fixed duration of 125µs. With some approximations, it is possible to estimate the magnitude of the
inefficiencies introduced by the frame headers.
Figure A.1 - GPON downstream frame.
The traffic patterns considered for this study relate primarily to Ethernet traffic. As such, based on real
measures taken in a CATV network [45], the average Ethernet frame considered was 653 bytes for the
downstream and 509 bytes for the upstream. Another assumption in this study is that each user has, on
average, two active services. What this means is that each user will have two data stream associated with
it and therefore two priority queues. In GPON, the service identifier is the AllocID field present in Figure
A.1. For all studies in this section, we’ll assume that each user always has information in its buffers to
send. The headers required for ranging and discovery of new ONTs are not considered here because
we’re assuming that all users on the PON are already active. If one wanted to include this, it would simply
be required to add another AllocID (AllocID=255, reserved for broadcast) and the respective transmission
times, which is the logical equivalent of having to control �� � � ONTs.
With the mentioned assumptions, there are two inefficiencies to consider: the one introduced by the
frame’s headers and the one introduced by the Generic Encapsulation Method (GEM). GEM is an
encapsulation method for all types of traffic that allows segmentation of packets to fit the allocated
bandwidth grants of each terminal. The efficiency of the GEM protocol is easy to calculate, since, when
encapsulating Ethernet frames, there are a total of 5 bytes of GEM headers and an additional 18 bytes of
Ethernet header (the Ethernet header with the preamble and delimiter removed). The efficiency of GEM
for both directions is then given by:
������w � \]t\]t � ] � �C � .�Z\\ (A.1)
������w � ].Z].Z � ] � �C � .�Z]^ (A.2)
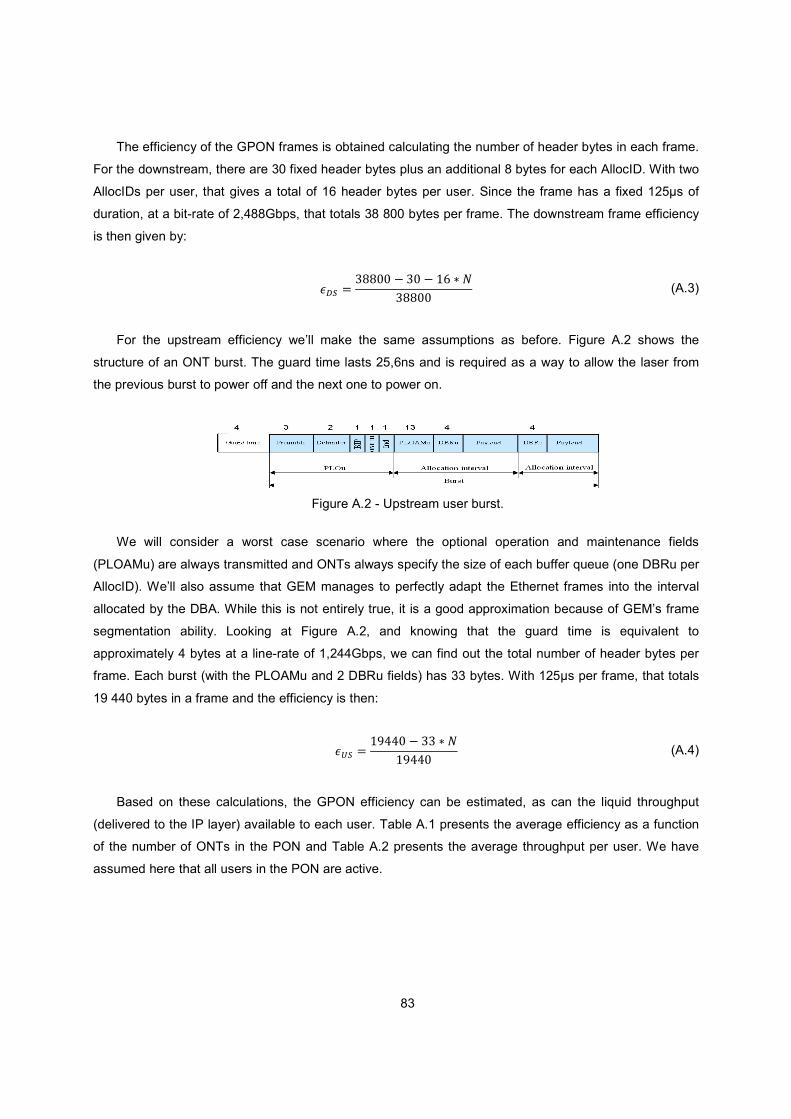
83
The efficiency of the GPON frames is obtained calculating the number of header bytes in each frame.
For the downstream, there are 30 fixed header bytes plus an additional 8 bytes for each AllocID. With two
AllocIDs per user, that gives a total of 16 header bytes per user. Since the frame has a fixed 125µs of
duration, at a bit-rate of 2,488Gbps, that totals 38 800 bytes per frame. The downstream frame efficiency
is then given by:
��w � tCC.. V t. V �\ ? �tCC.. (A.3)
For the upstream efficiency we’ll make the same assumptions as before. Figure A.2 shows the
structure of an ONT burst. The guard time lasts 25,6ns and is required as a way to allow the laser from
the previous burst to power off and the next one to power on.
Figure A.2 - Upstream user burst.
We will consider a worst case scenario where the optional operation and maintenance fields
(PLOAMu) are always transmitted and ONTs always specify the size of each buffer queue (one DBRu per
AllocID). We’ll also assume that GEM manages to perfectly adapt the Ethernet frames into the interval
allocated by the DBA. While this is not entirely true, it is a good approximation because of GEM’s frame
segmentation ability. Looking at Figure A.2, and knowing that the guard time is equivalent to
approximately 4 bytes at a line-rate of 1,244Gbps, we can find out the total number of header bytes per
frame. Each burst (with the PLOAMu and 2 DBRu fields) has 33 bytes. With 125µs per frame, that totals
19 440 bytes in a frame and the efficiency is then:
��w � �Zdd. V tt ? ��Zdd. (A.4)
Based on these calculations, the GPON efficiency can be estimated, as can the liquid throughput
(delivered to the IP layer) available to each user. Table A.1 presents the average efficiency as a function
of the number of ONTs in the PON and Table A.2 presents the average throughput per user. We have
assumed here that all users in the PON are active.
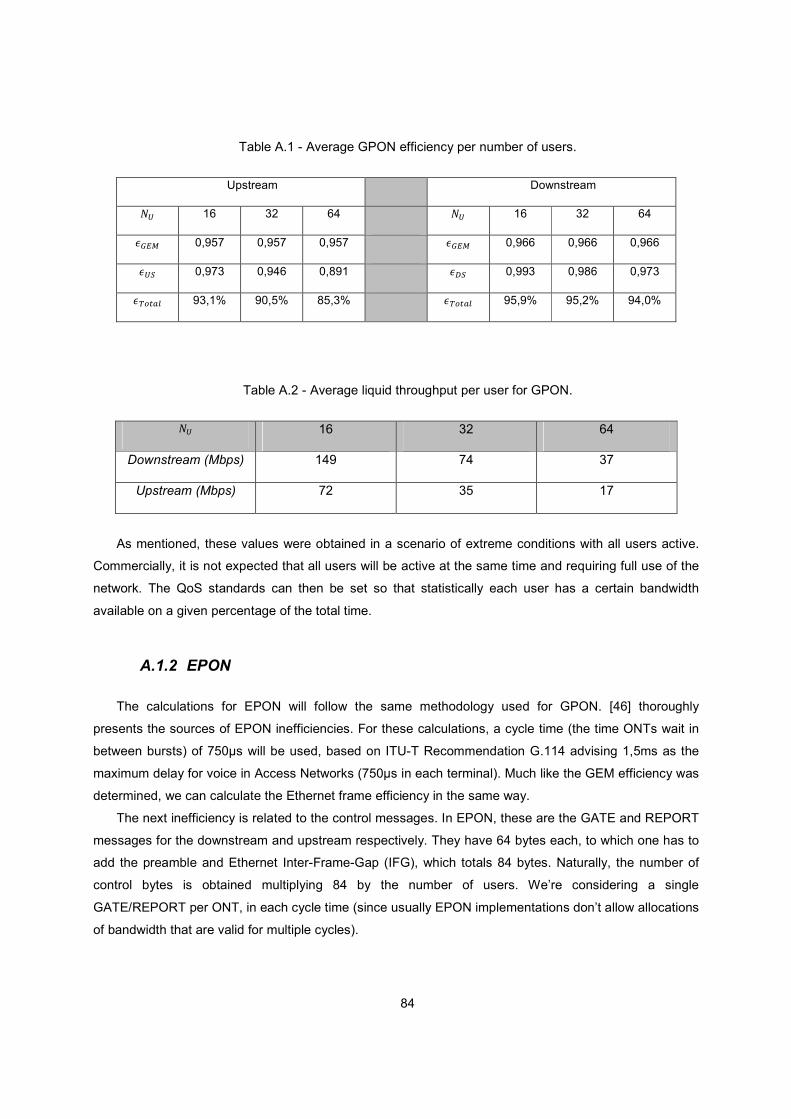
84
Table A.1 - Average GPON efficiency per number of users.
Upstream Downstream
�� 16 32 64 �� 16 32 64
���� 0,957 0,957 0,957 ���� 0,966 0,966 0,966
��w 0,973 0,946 0,891 ��w 0,993 0,986 0,973
�<���~ 93,1% 90,5% 85,3% �<���~ 95,9% 95,2% 94,0%
Table A.2 - Average liquid throughput per user for GPON.
�� 16 32 64
Downstream (Mbps) 149 74 37
Upstream (Mbps) 72 35 17
As mentioned, these values were obtained in a scenario of extreme conditions with all users active.
Commercially, it is not expected that all users will be active at the same time and requiring full use of the
network. The QoS standards can then be set so that statistically each user has a certain bandwidth
available on a given percentage of the total time.
A.1.2 EPON
The calculations for EPON will follow the same methodology used for GPON. [46] thoroughly
presents the sources of EPON inefficiencies. For these calculations, a cycle time (the time ONTs wait in
between bursts) of 750µs will be used, based on ITU-T Recommendation G.114 advising 1,5ms as the
maximum delay for voice in Access Networks (750µs in each terminal). Much like the GEM efficiency was
determined, we can calculate the Ethernet frame efficiency in the same way.
The next inefficiency is related to the control messages. In EPON, these are the GATE and REPORT
messages for the downstream and upstream respectively. They have 64 bytes each, to which one has to
add the preamble and Ethernet Inter-Frame-Gap (IFG), which totals 84 bytes. Naturally, the number of
control bytes is obtained multiplying 84 by the number of users. We’re considering a single
GATE/REPORT per ONT, in each cycle time (since usually EPON implementations don’t allow allocations
of bandwidth that are valid for multiple cycles).
85
Next we need to consider the guard times. These only take place in the upstream, to allow on-off
laser times, clock recovery and gain control. A typical EPON value is 400ns for gain control and clock
recovery, 512 ns for on-off laser time, and 32ns for code alignment. Adding all that up, we get 1856ns that
means 232 bytes per ONT in each cycle. The ranging and ONT discovery process also consumes bytes,
but to keep a balanced comparison with GPON, they weren’t considered here either.
Finally, we need to consider the so called Unused Slot Remainder (USR). This relates to the bytes
that are allocated by the OLT to a given ONT, but aren’t used because the Ethernet frame that a user
needs to transmit doesn’t fit the allocated window. Because unlike GEM, Ethernet frames cannot be
segmented, the frame must be transmitted in the next window. The average USR is obtained in [47] and
is given by:
�oR � T % ? D� V ����D%BB;��������T 0 ? Dm���D0BB;���|�;��� (A.5)
l��O � l�� are the maximum and minimum size of Ethernet frames, % is the number of bytes left in a
slot, ���� is the cumulative distribution function of Ethernet frame size, m��� is the probability density
function for the same variable and 0 is the size of the Ethernet frame. The calculations yielded an average
USR of 596 bytes.
The average EPON efficiency can now be calculated factoring in all these inefficiencies. In a 750µs
cycle there are 93 750 bytes being transmitted (calculations are performed at 1Gbps, not the line rate of
1.25Gbps because of the line coding). In the downstream, we simply have to subtract from this the bytes
reserved for control messages:
��w � Zt^]. V � ? CdZt^]. (A.6)
The upstream efficiency also has to account for the guard times and USR:
��w � Zt^]. V � ? Cd V � ? WtW V ]Z\Zt^]. (A.7)
Aggregating all the expressions, plus the Ethernet frame efficiency we get the results shown in Table
A.3.
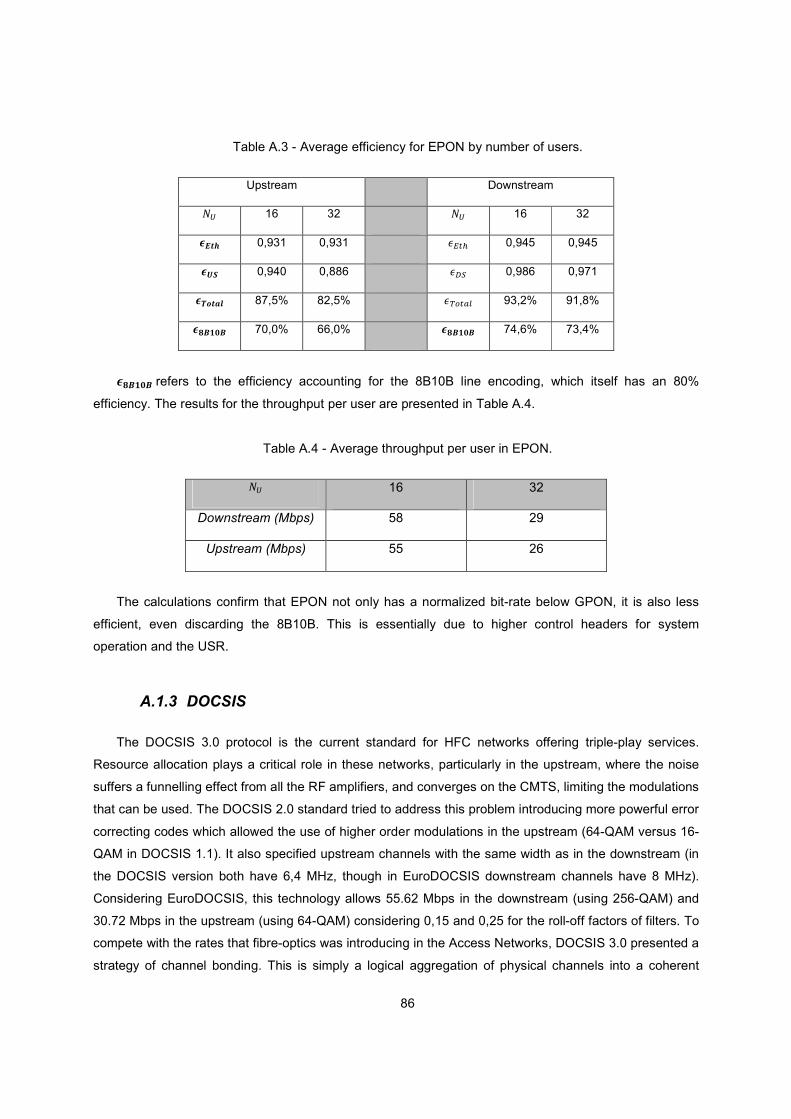
86
Table A.3 - Average efficiency for EPON by number of users.
Upstream Downstream
�� 16 32 �� 16 32
���� 0,931 0,931 ���� 0,945 0,945
� ¡ 0,940 0,886 ��w 0,986 0,971
�¢£�¤¥ 87,5% 82,5% �<���~ 93,2% 91,8%
�¦§A¨§ 70,0% 66,0% �¦§A¨§ 74,6% 73,4%
�¦§A¨§�refers to the efficiency accounting for the 8B10B line encoding, which itself has an 80%
efficiency. The results for the throughput per user are presented in Table A.4.
Table A.4 - Average throughput per user in EPON.
�� 16 32
Downstream (Mbps) 58 29
Upstream (Mbps) 55 26
The calculations confirm that EPON not only has a normalized bit-rate below GPON, it is also less
efficient, even discarding the 8B10B. This is essentially due to higher control headers for system
operation and the USR.
A.1.3 DOCSIS
The DOCSIS 3.0 protocol is the current standard for HFC networks offering triple-play services.
Resource allocation plays a critical role in these networks, particularly in the upstream, where the noise
suffers a funnelling effect from all the RF amplifiers, and converges on the CMTS, limiting the modulations
that can be used. The DOCSIS 2.0 standard tried to address this problem introducing more powerful error
correcting codes which allowed the use of higher order modulations in the upstream (64-QAM versus 16-
QAM in DOCSIS 1.1). It also specified upstream channels with the same width as in the downstream (in
the DOCSIS version both have 6,4 MHz, though in EuroDOCSIS downstream channels have 8 MHz).
Considering EuroDOCSIS, this technology allows 55.62 Mbps in the downstream (using 256-QAM) and
30.72 Mbps in the upstream (using 64-QAM) considering 0,15 and 0,25 for the roll-off factors of filters. To
compete with the rates that fibre-optics was introducing in the Access Networks, DOCSIS 3.0 presented a
strategy of channel bonding. This is simply a logical aggregation of physical channels into a coherent
87
stream. The capacity of the network itself wasn’t increased, only the maximum throughput that one single
user can have. In a typical example, 4 bonded channels in the downstream allow an ideal rate of 222,68
Mbps. For the upstream, 122,88 Mbps can be achieved in the same conditions.
HFC networks were originally conceived for delivering TV service. So naturally the data channels
referred above are shared in the coaxial cable spectrum with TV channels. This is where a study of HFC
efficiency becomes difficult. Each operator has a different allocation of the spectrum between data and
TV. Sometimes the same operator has different allocations in different regions. The tendency for HFC
operators is to progressively leave analog TV channels that occupy the full 8 MHz of each channel. Digital
TV channels on the other hand are more bandwidth efficient, so one can place around 10 Standard
Definition (SD) channels or 5 High Definition (HD) channels in a single 8 MHz carrier. This allows an
operator to release channels for the data service increasing capacity. The problem is that many legacy
subscribers don’t have the equipment required for digital decoding and cannot simply be shut down.
CATV operators are then faced with, in the future, having to provide the digital boxes at a lower cost to
encourage adoption in order to benefit from the bandwidth left available from the analog carriers.
A critical factor in the capacity of the network is the number of users per cell. Unlike PONs, where the
number is set by the maximum split ratio, for HFC networks this was originally set to guarantee a
threshold of TV quality for all the users in a cell. When the data service began being provided, cell sizes
had to be reduced because the total capacity had to be shared among all users subscribing to data. This
is why cell sizes ranging in the 1 500 users per cell were cut to about 200. With the increased competition
from PONs, this is expected to go even lower, to about 50 users per cell in high density areas. There are
two ways to increase capacity: a logical node split and a physical one. The logical node split consists in
multiplexing wavelengths between distribution hubs and optical nodes (that serves various cells).
Originally these were serviced by a single wavelength. By adding additional wavelengths (adding lasers
at the hub and the node) an operator can prevent that higher activity in one cell means another cell
connected in the same node has less bandwidth available. The physical node split is the process of
pushing the optical node further into the cell by laying fibre until the next derivation in the coaxial cable.
This way, the old cell is effectively split in two, and each new cell has the same capacity has the old one
but fewer users to share the resources.
The focus of this Thesis was on PONs rather than HFC. For this reason, the analysis presented here
is not as deep as the one provided for PONs. Another reason is that as was shown HFC networks are
less “standard” than PONs, since the number of users varies, as does the number of channels.
Additionally, DOCSIS is backward compatible, meaning that a DOCSIS 2.0 cable modem can be
connected to a DOCSIS 3.0 CMTS and be serviced, but this also means more overhead in controlling
different types of users. Besides that, DOCSIS can operate on both Time Division Multiple Access
(TDMA) and Synchronous Code Division Multiple Access (S-CDMA) modes, which also means additional
overhead if both modes are present. Because of this, the overhead calculations for DOCSIS 3.0 were
based on common values presented in [48]. In the downstream we have 4,7% of inefficiency due to the
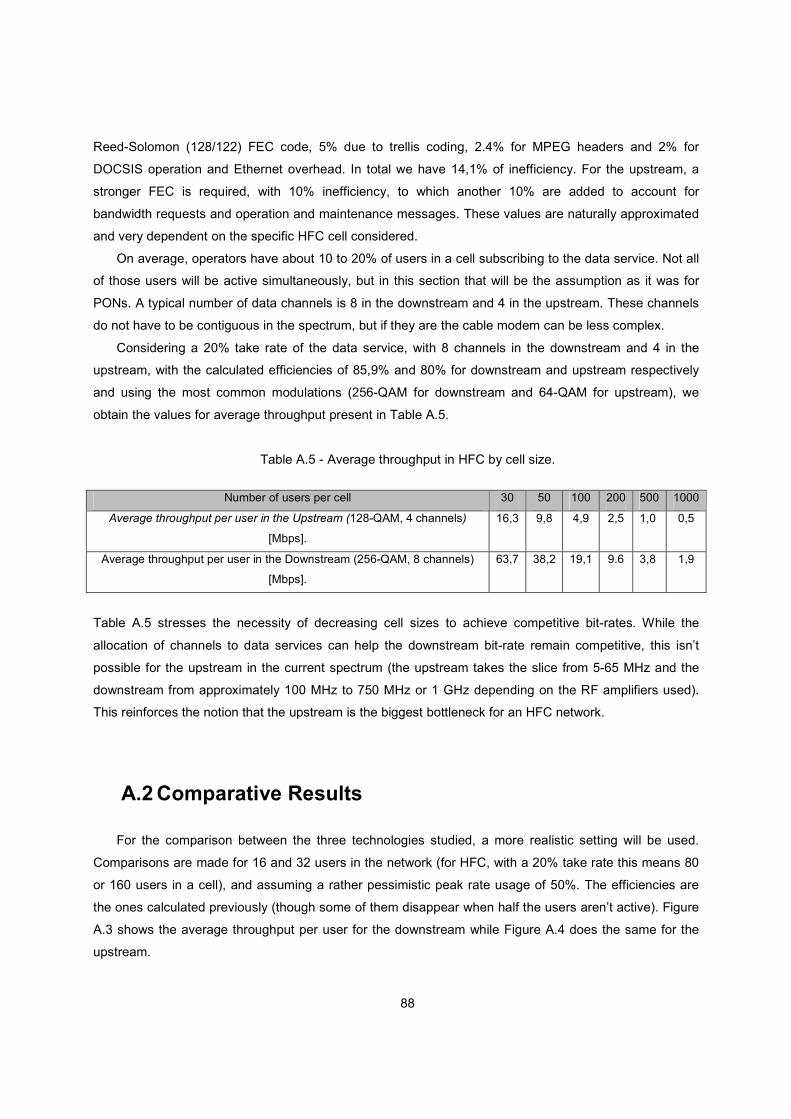
88
Reed-Solomon (128/122) FEC code, 5% due to trellis coding, 2.4% for MPEG headers and 2% for
DOCSIS operation and Ethernet overhead. In total we have 14,1% of inefficiency. For the upstream, a
stronger FEC is required, with 10% inefficiency, to which another 10% are added to account for
bandwidth requests and operation and maintenance messages. These values are naturally approximated
and very dependent on the specific HFC cell considered.
On average, operators have about 10 to 20% of users in a cell subscribing to the data service. Not all
of those users will be active simultaneously, but in this section that will be the assumption as it was for
PONs. A typical number of data channels is 8 in the downstream and 4 in the upstream. These channels
do not have to be contiguous in the spectrum, but if they are the cable modem can be less complex.
Considering a 20% take rate of the data service, with 8 channels in the downstream and 4 in the
upstream, with the calculated efficiencies of 85,9% and 80% for downstream and upstream respectively
and using the most common modulations (256-QAM for downstream and 64-QAM for upstream), we
obtain the values for average throughput present in Table A.5.
Table A.5 - Average throughput in HFC by cell size.
Number of users per cell 30 50 100 200 500 1000
Average throughput per user in the Upstream (128-QAM, 4 channels)
[Mbps].
16,3 9,8 4,9 2,5 1,0 0,5
Average throughput per user in the Downstream (256-QAM, 8 channels)
[Mbps].
63,7 38,2 19,1 9.6 3,8 1,9
Table A.5 stresses the necessity of decreasing cell sizes to achieve competitive bit-rates. While the
allocation of channels to data services can help the downstream bit-rate remain competitive, this isn’t
possible for the upstream in the current spectrum (the upstream takes the slice from 5-65 MHz and the
downstream from approximately 100 MHz to 750 MHz or 1 GHz depending on the RF amplifiers used).
This reinforces the notion that the upstream is the biggest bottleneck for an HFC network.
A.2 Comparative Results
For the comparison between the three technologies studied, a more realistic setting will be used.
Comparisons are made for 16 and 32 users in the network (for HFC, with a 20% take rate this means 80
or 160 users in a cell), and assuming a rather pessimistic peak rate usage of 50%. The efficiencies are
the ones calculated previously (though some of them disappear when half the users aren’t active). Figure
A.3 shows the average throughput per user for the downstream while Figure A.4 does the same for the
upstream.
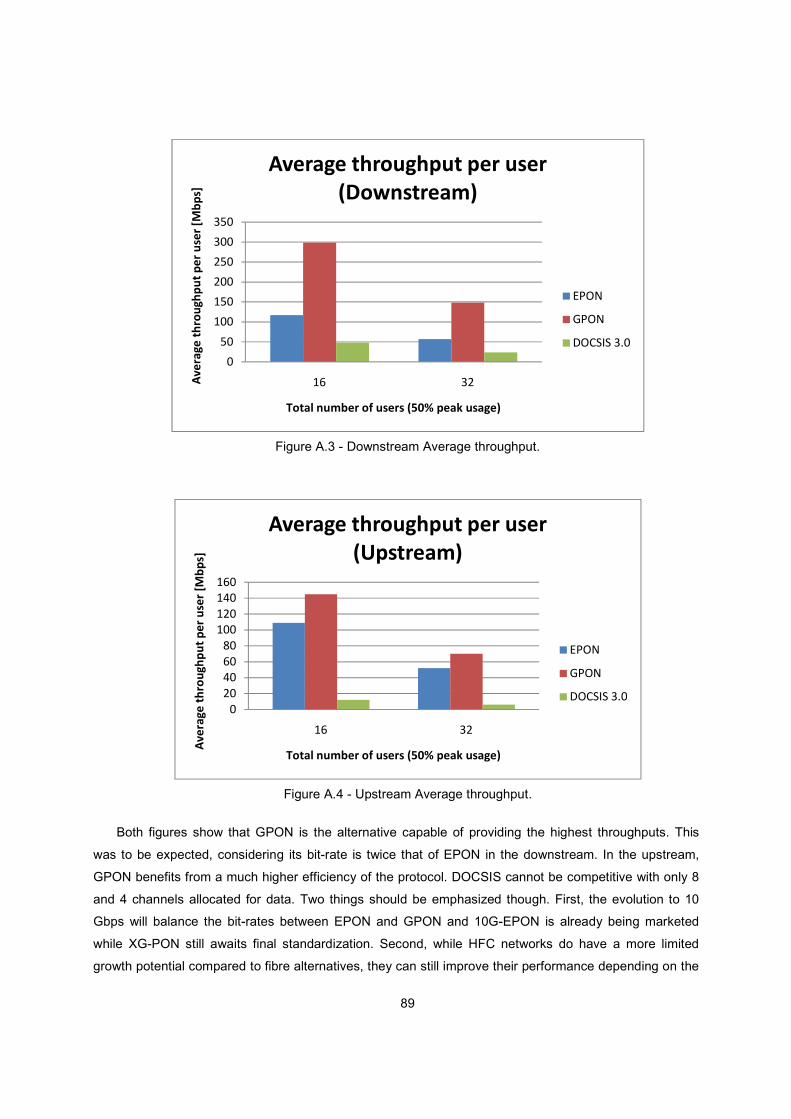
89
Figure A.3 - Downstream Average throughput.
Figure A.4 - Upstream Average throughput.
Both figures show that GPON is the alternative capable of providing the highest throughputs. This
was to be expected, considering its bit-rate is twice that of EPON in the downstream. In the upstream,
GPON benefits from a much higher efficiency of the protocol. DOCSIS cannot be competitive with only 8
and 4 channels allocated for data. Two things should be emphasized though. First, the evolution to 10
Gbps will balance the bit-rates between EPON and GPON and 10G-EPON is already being marketed
while XG-PON still awaits final standardization. Second, while HFC networks do have a more limited
growth potential compared to fibre alternatives, they can still improve their performance depending on the
0
50
100
150
200
250
300
350
16 32Av
era
ge
th
rou
gh
pu
t p
er
use
r [M
bp
s]
Total number of users (50% peak usage)
Average throughput per user
(Downstream)
EPON
GPON
DOCSIS 3.0
0
20
40
60
80
100
120
140
160
16 32
Av
era
ge
th
rou
gh
pu
t p
er
use
r [M
bp
s]
Total number of users (50% peak usage)
Average throughput per user
(Upstream)
EPON
GPON
DOCSIS 3.0

90
operators’ ability to reuse the analog channels in the spectrum for data services, and perhaps extend the
upstream band towards a less asymmetrical network.
91
B. Software Implementation
This Appendix offers some insight on the implementation of the ILP models in the software used,
namely lpsolve and MATLAB®.
B.1 Describing the Model
The solver used for implementing the ILP models was lpsolve, a free licensed package. As with most
solvers, to describe the model one only has to feed the usual parameters, in the canonical form:
��� m (B.1)
Subject to:
e� � # (B.2)
Normally, this would have to be inserted manually. However, in this case lpsolve’s Application
Programming Interface (API) was used in conjunction with MATLAB®. This enabled the use of MATLAB’s
matrix oriented interface to quickly formulate different models.
The vectors m and # and the matrix e are easily inserted with MATLAB. As for the sign of the
inequalities, lpsolve accepts an inequality vector where -1 means “lower than or equal”, 0 means “equal”
and 1 means “greater than or equal”. The software does not accept strict inequalities because of rounding
errors. For LP models the practical result is the same since the solution can be as close to the bound as
desired without reaching it. For ILP or MILP models, an equivalent strict inequality is achieved by setting
the bound to the next or previous integer according to the inequality sign, so for instance if one has � © W
it is the same as having � � � when � is integer.
The definition of the variables’ bounds is also provided in vector form with an entry for each variable.
By default, the variables in lpsolve have a lower bound of zero. In all the models described in this work,
no variable could be negative so this was not changed. That is the reason (along with compactness of the
model) why the formulations do not include the explicit constraints setting the variables to be greater than
or equal to zero. The lower bound vector is therefore filled with zeros. The upper bound vector can either
be set accordingly to the model (for instance in ILP Model 2, the � variables had an upper bound
corresponding to the maximum number of splitters per Junction Box) or it can be set to plus infinity and let
specific constraints limit the variable’s range. Setting bounds through the bound vectors usually helps
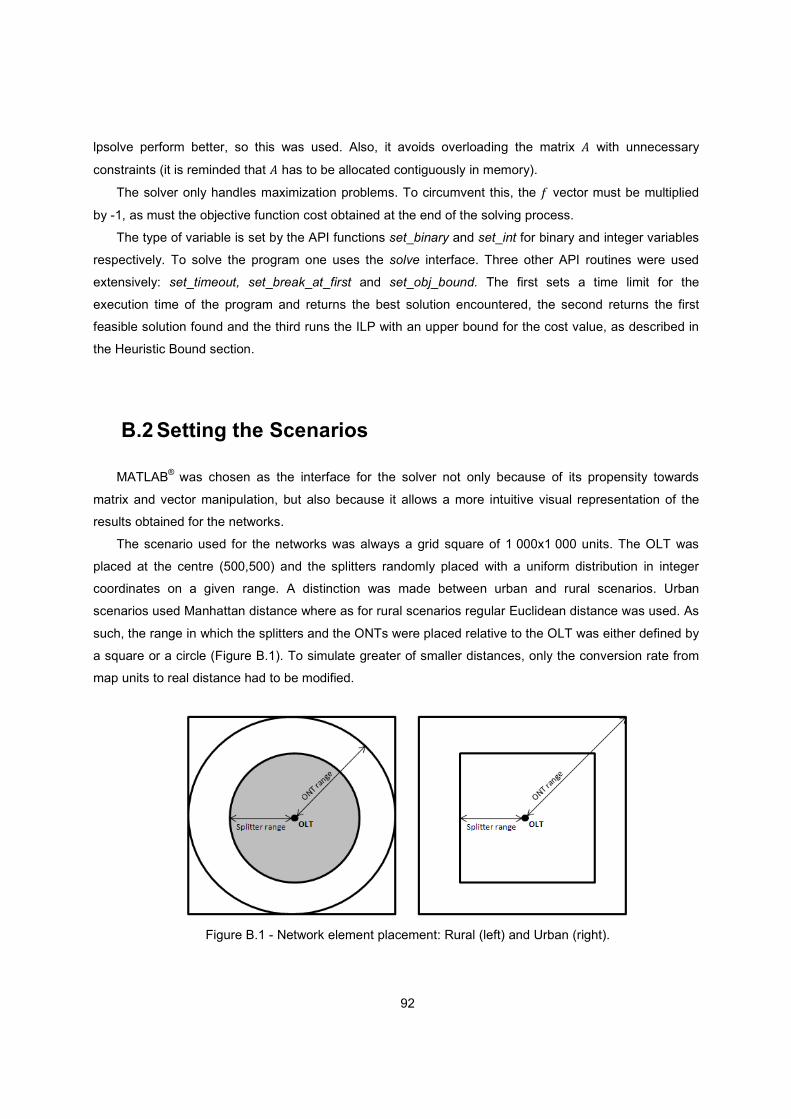
92
lpsolve perform better, so this was used. Also, it avoids overloading the matrix e with unnecessary
constraints (it is reminded that e has to be allocated contiguously in memory).
The solver only handles maximization problems. To circumvent this, the m vector must be multiplied
by -1, as must the objective function cost obtained at the end of the solving process.
The type of variable is set by the API functions set_binary and set_int for binary and integer variables
respectively. To solve the program one uses the solve interface. Three other API routines were used
extensively: set_timeout, set_break_at_first and set_obj_bound. The first sets a time limit for the
execution time of the program and returns the best solution encountered, the second returns the first
feasible solution found and the third runs the ILP with an upper bound for the cost value, as described in
the Heuristic Bound section.
B.2 Setting the Scenarios
MATLAB® was chosen as the interface for the solver not only because of its propensity towards
matrix and vector manipulation, but also because it allows a more intuitive visual representation of the
results obtained for the networks.
The scenario used for the networks was always a grid square of 1 000x1 000 units. The OLT was
placed at the centre (500,500) and the splitters randomly placed with a uniform distribution in integer
coordinates on a given range. A distinction was made between urban and rural scenarios. Urban
scenarios used Manhattan distance where as for rural scenarios regular Euclidean distance was used. As
such, the range in which the splitters and the ONTs were placed relative to the OLT was either defined by
a square or a circle (Figure B.1). To simulate greater of smaller distances, only the conversion rate from
map units to real distance had to be modified.
Figure B.1 - Network element placement: Rural (left) and Urban (right).
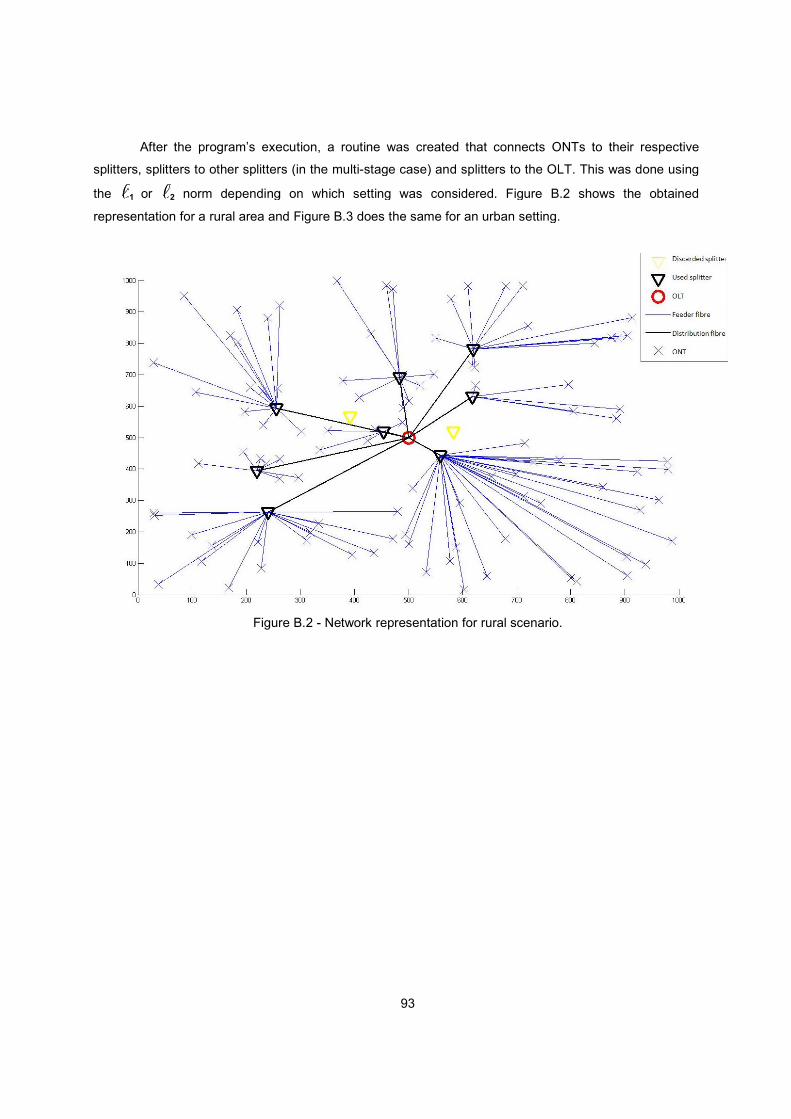
After the program’s execution, a routine was created that connects ONTs to their respective
splitters, splitters to other splitters (in the multi
the 1 or 2 norm depending on which setting was con
representation for a rural area and
Figure B.
93
After the program’s execution, a routine was created that connects ONTs to their respective
splitters, splitters to other splitters (in the multi-stage case) and splitters to the OLT. This was done using
norm depending on which setting was considered. Figure B.
representation for a rural area and Figure B.3 does the same for an urban setting.
Figure B.2 - Network representation for rural scenario.
After the program’s execution, a routine was created that connects ONTs to their respective
stage case) and splitters to the OLT. This was done using
Figure B.2 shows the obtained
does the same for an urban setting.
Network representation for rural scenario.
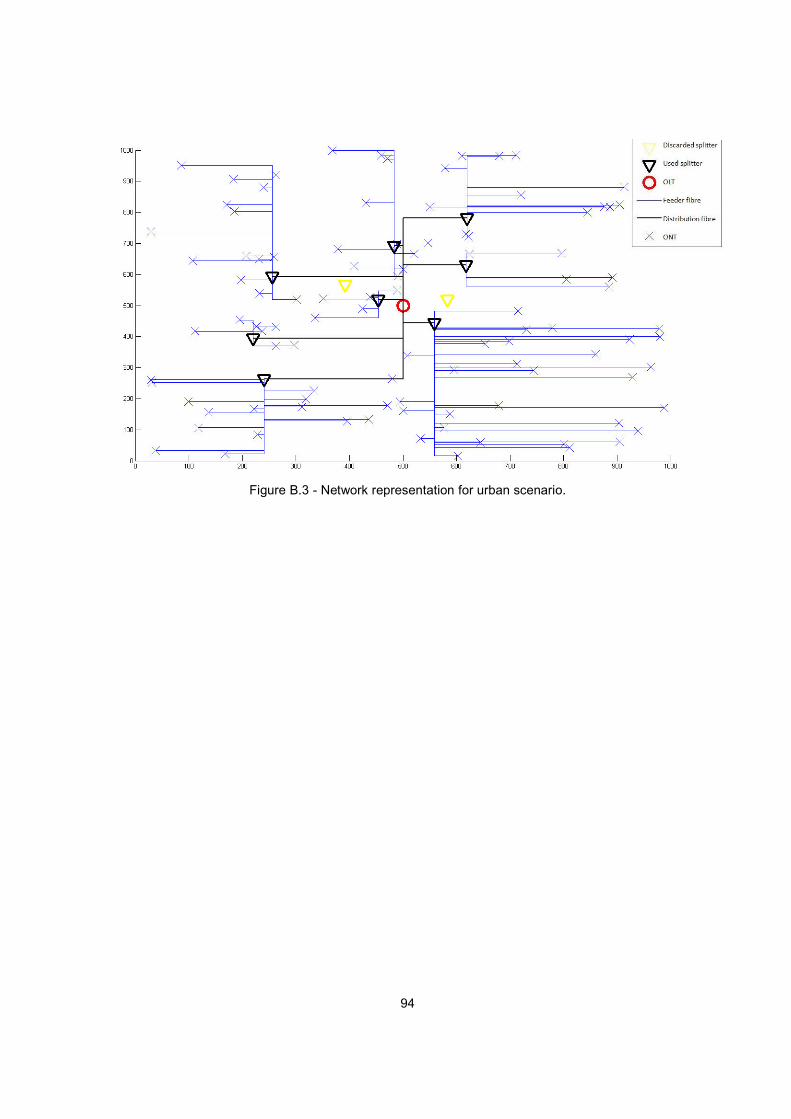
94
Figure B.3 - Network representation for urban scenario.
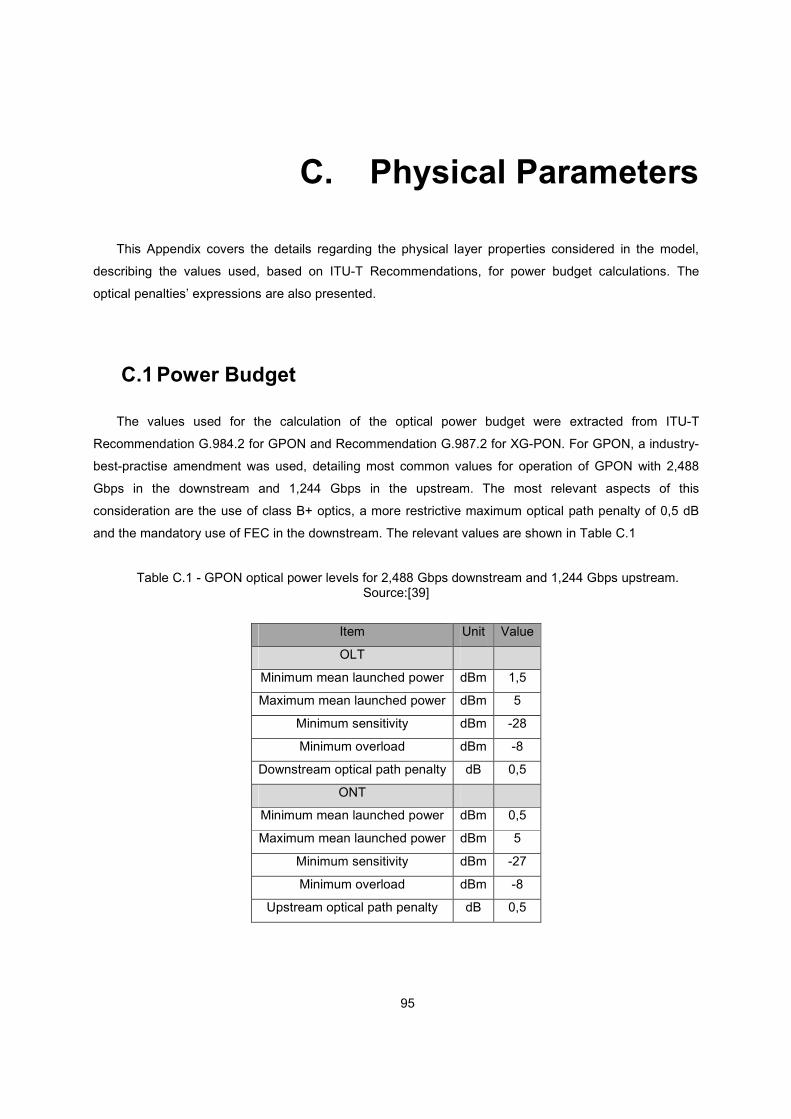
95
C. Physical Parameters
This Appendix covers the details regarding the physical layer properties considered in the model,
describing the values used, based on ITU-T Recommendations, for power budget calculations. The
optical penalties’ expressions are also presented.
C.1 Power Budget
The values used for the calculation of the optical power budget were extracted from ITU-T
Recommendation G.984.2 for GPON and Recommendation G.987.2 for XG-PON. For GPON, a industry-
best-practise amendment was used, detailing most common values for operation of GPON with 2,488
Gbps in the downstream and 1,244 Gbps in the upstream. The most relevant aspects of this
consideration are the use of class B+ optics, a more restrictive maximum optical path penalty of 0,5 dB
and the mandatory use of FEC in the downstream. The relevant values are shown in Table C.1
Table C.1 - GPON optical power levels for 2,488 Gbps downstream and 1,244 Gbps upstream. Source:[39]
Item Unit Value
OLT
Minimum mean launched power dBm 1,5
Maximum mean launched power dBm 5
Minimum sensitivity dBm -28
Minimum overload dBm -8
Downstream optical path penalty dB 0,5
ONT
Minimum mean launched power dBm 0,5
Maximum mean launched power dBm 5
Minimum sensitivity dBm -27
Minimum overload dBm -8
Upstream optical path penalty dB 0,5
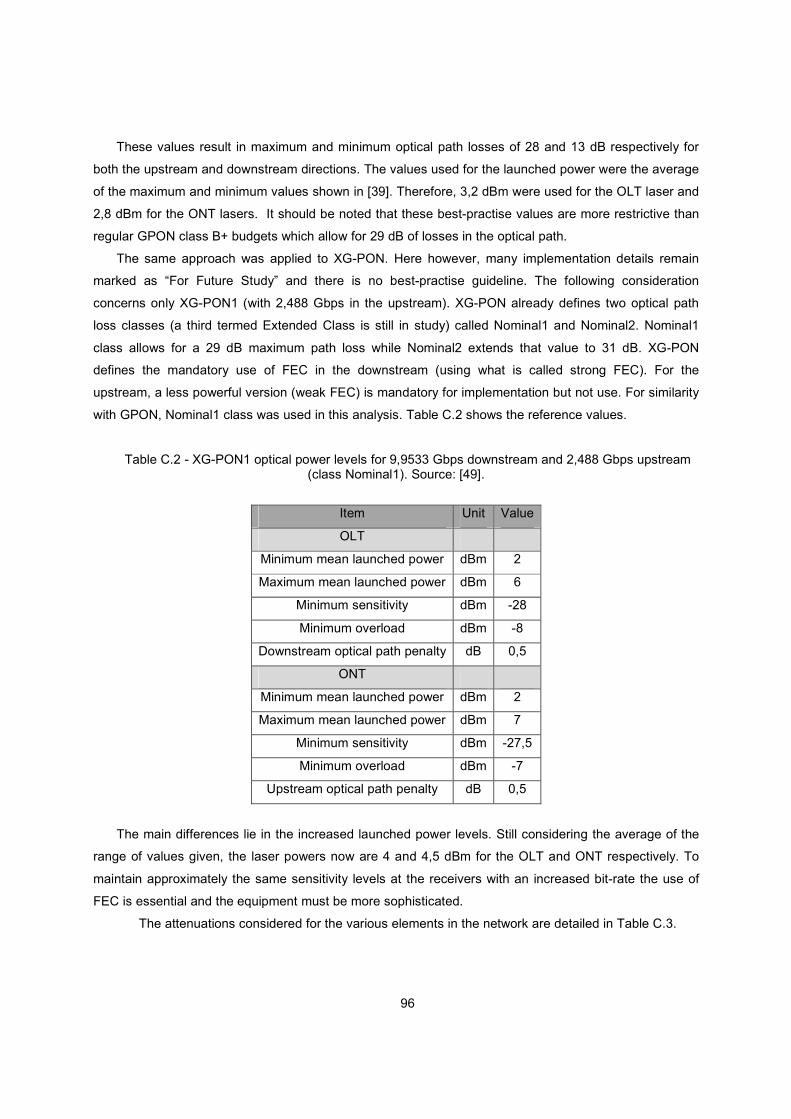
96
These values result in maximum and minimum optical path losses of 28 and 13 dB respectively for
both the upstream and downstream directions. The values used for the launched power were the average
of the maximum and minimum values shown in [39]. Therefore, 3,2 dBm were used for the OLT laser and
2,8 dBm for the ONT lasers. It should be noted that these best-practise values are more restrictive than
regular GPON class B+ budgets which allow for 29 dB of losses in the optical path.
The same approach was applied to XG-PON. Here however, many implementation details remain
marked as “For Future Study” and there is no best-practise guideline. The following consideration
concerns only XG-PON1 (with 2,488 Gbps in the upstream). XG-PON already defines two optical path
loss classes (a third termed Extended Class is still in study) called Nominal1 and Nominal2. Nominal1
class allows for a 29 dB maximum path loss while Nominal2 extends that value to 31 dB. XG-PON
defines the mandatory use of FEC in the downstream (using what is called strong FEC). For the
upstream, a less powerful version (weak FEC) is mandatory for implementation but not use. For similarity
with GPON, Nominal1 class was used in this analysis. Table C.2 shows the reference values.
Table C.2 - XG-PON1 optical power levels for 9,9533 Gbps downstream and 2,488 Gbps upstream (class Nominal1). Source: [49].
Item Unit Value
OLT
Minimum mean launched power dBm 2
Maximum mean launched power dBm 6
Minimum sensitivity dBm -28
Minimum overload dBm -8
Downstream optical path penalty dB 0,5
ONT
Minimum mean launched power dBm 2
Maximum mean launched power dBm 7
Minimum sensitivity dBm -27,5
Minimum overload dBm -7
Upstream optical path penalty dB 0,5
The main differences lie in the increased launched power levels. Still considering the average of the
range of values given, the laser powers now are 4 and 4,5 dBm for the OLT and ONT respectively. To
maintain approximately the same sensitivity levels at the receivers with an increased bit-rate the use of
FEC is essential and the equipment must be more sophisticated.
The attenuations considered for the various elements in the network are detailed in Table C.3.
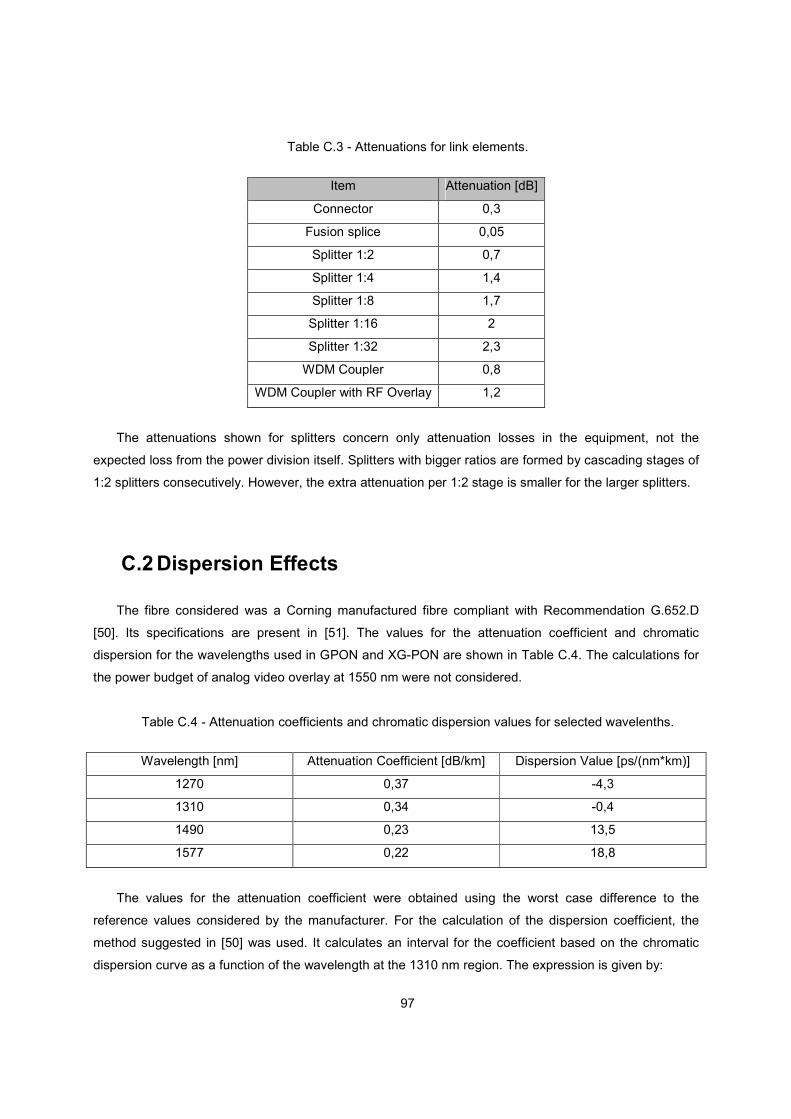
97
Table C.3 - Attenuations for link elements.
Item Attenuation [dB]
Connector 0,3
Fusion splice 0,05
Splitter 1:2 0,7
Splitter 1:4 1,4
Splitter 1:8 1,7
Splitter 1:16 2
Splitter 1:32 2,3
WDM Coupler 0,8
WDM Coupler with RF Overlay 1,2
The attenuations shown for splitters concern only attenuation losses in the equipment, not the
expected loss from the power division itself. Splitters with bigger ratios are formed by cascading stages of
1:2 splitters consecutively. However, the extra attenuation per 1:2 stage is smaller for the larger splitters.
C.2 Dispersion Effects
The fibre considered was a Corning manufactured fibre compliant with Recommendation G.652.D
[50]. Its specifications are present in [51]. The values for the attenuation coefficient and chromatic
dispersion for the wavelengths used in GPON and XG-PON are shown in Table C.4. The calculations for
the power budget of analog video overlay at 1550 nm were not considered.
Table C.4 - Attenuation coefficients and chromatic dispersion values for selected wavelenths.
Wavelength [nm] Attenuation Coefficient [dB/km] Dispersion Value [ps/(nm*km)]
1270 0,37 -4,3
1310 0,34 -0,4
1490 0,23 13,5
1577 0,22 18,8
The values for the attenuation coefficient were obtained using the worst case difference to the
reference values considered by the manufacturer. For the calculation of the dispersion coefficient, the
method suggested in [50] was used. It calculates an interval for the coefficient based on the chromatic
dispersion curve as a function of the wavelength at the 1310 nm region. The expression is given by:

98
ªo�«�Od ¬� V ª�«�O �ª ®¯° � gDªB � ªo�«�Od ¬� V ª�«� �ª ®¯° (C.1)
Where ª�«�O �� ª�«� are the maximum and minimum zero-dispersion wavelengths and o�«�O is the
maximum zero-dispersion slope coefficient. According to [51] these are 1324 nm, 1304 nm, and 0,092
ps/(nm2*km) respectively. The value used was the median of the interval dictated by (C.1).
The power penalties due to dispersion considered were due to the spectral width of the lasers and the
modulated signal bandwidth. Their sum should not exceed 0,5 dB to meet the connection requirements.
The expressions for these penalties are, according to [43], given by:
uy��Dg�lB±�²³ � V] ? '�b��D� V Ddg´ ? g�l ? µ�BcB������m�±dg´ ? g�l ? µ�± © � (C.2)
uy��Dg�lB±�²� � ] ? '�b��_D� V C{�¶clgcBc � DC¶clgcBca (C.3)
With ¶c given by:
¶c � Vg�ª�cW·� (C.4)
(C.2) refers to the penalty attributed to the laser spectral width and (C.3) to the optical signal
bandwidth. g´ is the bit-rate, g� is the dispersion coefficient, µ� is the rms spectral width of the laser
source, l is the distance covered by the fibre and ª� is the central wavelength of the optical signal. The
parameter {� is the chirp parameter of the optical emitter.
As for the spectral widths considered for the lasers, they were based on [43] and datasheets from
GPON vendors. For a FP laser, a 1 nm spectral width at -3 dB was considered, while for a DFB laser the
value was 10-4 nm at -3 dB.
The chirp parameter used was 6 when considering direct modulation, whereas when external
modulation is used the chirp parameter can be considered zero [43].

99















![Delphi Technologies Next Generation GDi-System improved ......corresponding 400 bar capable high pressure pump (GFP2.35) for a 4-cylinder 350 bar application [6]. Figure 3: Gasoline](https://img.pdfslide.fr/doc/110x75/61011cb8cdf30c4d10541aed/delphi-technologies-next-generation-gdi-system-improved-corresponding-400.jpg)













