Embed Size (px)
Citation preview

Traitement du signal
sur processeurs DSP
Rémi Mégret
ENSEIRB 2009-10
sur processeurs DSP
1

Plan
• Généralités
• Architecture des DSP• Architecture des DSP
• Développement pour un DSP
• Représentation numérique du signal
• Mise en œuvre de filtres
2

Généralités surGénéralités sur
les processeurs DSP
3

DSP: une introduction
• Quel est le contexte d’utilisation du traitement numérique du signal (TNS) ?numérique du signal (TNS) ?
• De quelles solutions dispose-t-on pour effectuer ce travail ?
• Quelle est la spécificité d’un processeur DSP (Digital Signal Processor) ?
4

Chaîne de Traitement Numérique
Signal originalGrandeur physique
Capteur
Memfsfs
G
Adaptation du
signal d’entrée
Gain + Démodulation
Signal TraitéSignal analogique
5
Filtreanti-repliement
EchantillonageEchantillonage
CAN CNAFiltre delissage
DSP
PortsE/S
QuantificationQuantification
Reconstruction Reconstruction du signaldu signal
Signal analogiqueSignal numériqueSignal numérique

Chaîne de Traitement Numérique (2)
Memcalcul
Signaux analogiques(RF, capteur physique, microphone…)
DSP
PortsE/S
AdapteurAnalogique /Numérique
Démodulation analogiquegain, échantillonnage,quantification…
Adapteur
AdapteurNumérique /Analogique
Adapteur
Modulation analogiqueCNA, amplification…
Calculsnumériques
6
AdapteurNumérique / Numérique
Transmission depuis un module numérique :coprocessing, acquisition (capteur CCD)
Traduction de protocole
AdapteurNumérique /Numérique

Le cahier des charges
• Traitement temps réel– Latence maximale autorisée entre l’arrivée d’une donnée
et la disponibilité du résultat du calcul correspondant.et la disponibilité du résultat du calcul correspondant.
• Débits de données important– Signaux numériques = quantité importante de données
transmises séquentiellement
• Charge de calcul importante– Convolution, FFT…– Charge de calcul = Débit × Complexité du calcul– Charge de calcul = Débit × Complexité du calcul
• Maîtrise de la précision des calculs
• Traitements répétitifs
7

Opérations classiques en TNS
• MAC : multiplication-accumulation
– acc ← acc + bi . xi– acc ← acc + bi . xi
– Filtres à réponse impulsionelle finie (RIF):
∑−
=
−=1
0
)()()(
P
i
inxibny
8
– Filtres à réponse impulsionelle infinie (RII):
∑∑−
=
−
=
−−−=1
1
1
0
)()()()()(
Q
j
P
i
jnyjainxibny

Opérations classiques en TNS
• MAC– Filtrage (convolution)– Correlation– Correlation– Produit scalaire
• FFT– Analyse spectrale
• DCT– Compression d’images
• Compare Select and Store• Compare Select and Store– Algorithme de Viterbi (Com. num.)
• Génération de formes d’ondes– Communications numériques
9

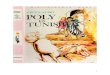
Applications des processeurs DSP
60,0%
80,0%source : Will Strauss, Forward Concepts,publié dans Programmable Logic 2007
0,0%
20,0%
40,0%
60,0%
Wireless MultipurposeConsumer electronics
Wireline Computer Automotive
10
72,5% 8,4% 8,2% 4,7% 3,3% 2,5%
Parts de marché vente DSP programmables (2006)
Rmq: Les SoCs, et ASIC sont également très utilisés pour des applications similaires, mais ne sont pas comptabilisés ici.

Applications
• Communications– Software Defined Radio– Sans fil (cellulaires, télévision
• Image / vidéo– Compression/Codage
– Sans fil (cellulaires, télévision numérique, radio numérique)
– Filaire (DSL, cable)– Modem– Cryptage
• Audio– Mixage et édition
– Compression/Codage
– Composition
– Traitement
• Militaire– Imagerie
• radar, sonar…
– Cryptographie– Mixage et édition– Effets– Suppression de bruit– Annuleur d’echo
– Cryptographie
– Guidage de missiles
– Navigation
11

Applications
• Biomédical– Equipements de monitoring
• Signaux biophysiques
• Automatisation– Commande de machines– Contrôle de moteurs• Signaux biophysiques
• ElectroEncéphaloGramme (EEG)
• ElectroCardioGramme (ECG)
– Radiographie
• Instrumentation– Analyseurs de spectre
Générations de fonctions
– Contrôle de moteurs– Robots– Servomécanismes
• Electronique Automobile– Contrôle du moteur– Assistance au freinage– Aide à la navigation– Générations de fonctions
– Analyseurs de régimes transitoires
– Aide à la navigation– Commandes vocales
12

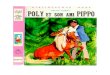
Constructeurs de processeurs DSP
50%
60%
70%Chiffres 2007Source : Forward Concepts
Wireless/DSP Market Bulletin, 4 Fevrier 2008
0%
10%
20%
30%
40%
50%
65% 12% 7% 3% 13%
Texas Instruments
Freescale (Agere)Analog Devices
Autres (NXP, NEC,
13
dspvillage.ti.comwww.freescale.comAgere -> LSI, Infineonwww.analog.com
Marché de 7.8 Milliards de $ en 20072006-2007: -6.7%2007-2008:+7% (prévision)
Parts de marché vente DSP programmables (2007)
Source: http://www.fwdconcepts.com/DSPBulletin_2408.pdf

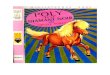
Famille TMS320 Texas Instruments
C2000 C5000 C6000
Lowest Cost
Control Systems� Motor Control
� Storage
� Digital Ctrl Systems
Efficiency
Best MIPS perWatt / Dollar / Size� Wireless phones
� Internet audio players
� Digital still cameras
� Modems
� Multi Channel and Multi Function App's
� Comm Infrastructure� Wireless Base-stationsDSL
Performance &Best Ease-of-Use
virgule fixe 16 bits
14
� Modems
� Telephony
� VoIP
� DSL� Imaging� Multi-media Servers� Videovirgule fixe 16 bits
virgule fixe et flottante, 32 bits
Clients mobiles Infrastructure

15

Famille DSP Analog Devices
16
TigerSHARC : virgule flottante 24 bits, hautes performances
ADSPBFxx (Blackfin) : virgule fixe 16 bits, hautes performances
SHARC : virgule fixe ou flottante 32 bits
ADSP21xx : virgule fixe 16 bits

Traitement numérique vs. analogique
En quoi le passage par le numérique est-il intéressant,même lorsque l’entrée et la sortie sont analogiques ?
Signalanalogique
Signalanalogique
Circuit électronique à composants analogiques
17
DSPCAN CNASignalanalogique
Signalanalogique
Signalnumérique
Signalnumérique

Traitement Numérique vs. Analogique
Numérique AnalogiqueFixes et connus à l'avance
Dépend de la qualité des Précision / RSB
Fixes et connus à l'avance
Liés à la taille des mots mémoire (16/24/32 bits)
Dépend de la qualité des composants
Sources de bruitEchantillonnage
Quantification
Bruit électromagnétique,
température, humidité, vieillissement
Reconfigurabilité Changer le logiciel
Matériel
Calibration nécessaire(Arrivée récente de puces reprogrammables (Arrivée récente de puces reprogrammables incluant des composants analogiques)
Largeur de bande utilisable
Limitée par l'échantillonnagePeut travailler à très haute
fréquence
18

Un exemple: la radio logicielle(Software Defined Radio : SDR)
• Complexité accrue des traitements sur le signal– Modulation à large bande, multi-utilisateurs (CDMA, OFDMA…) et adaptative– Egalisation, estimation de canal– Codes correcteurs d’erreurs (Turbo-codes)– Codes correcteurs d’erreurs (Turbo-codes)
• Multiplicité des protocoles de communication– Reconfigurabilité logicielle du protocole utilisé
19Image: Agilent Technologie, http://www.soccentral.com/results.asp?CatID=488&EntryID=24811
SDR Development Platform(www.lyrtech.com)
TMS320DM6446 SoC ARM+DSPVirtex-4 SX35 FPGADAC/ADCRF Module

Plateformes matérielles pour le Plateformes matérielles pour le
traitement numérique du signal
20

Solutions matérielles pour le TNS
• Processeur– Processeur d’usage général– Microcontrôleur
Architectureprocesseur– Microcontrôleur
– DSP (Digital Signal Processor)
• Multiprocesseurs– GPU (Graphics Processing Unit)
• Architectures reconfigurables– FPGA (Field-Programmable Gate Array)
processeur
– FPGA (Field-Programmable Gate Array)
• Architectures figées– ASSP (Application Specific Standard Product)– ASIC (Application-Specific Integrated Circuit)
21
Architecturespécialisée

Exemple d'un filtre RIFArchitecture dédiée (FPGA / ASIC)
x(n)
p
∑−
=
−=1
0
)()()(
P
i
inxibny
b(0) b(1) b(2) b(3) b(4) b(5)
log2(p)
22
y(n)
log2(p)
Architecture systolique dédiéeTraitement fortement parallèleEfficace pour le RIF, mais peu flexible

Exemple d'un filtre RIF Architecture processeur
∑−
=
−=1
0
)()()(
P
i
inxibny
Mémoire
E/S
bx programmey
CPU
unités de
calcul
registres
23
Architecture de type processeurTraitement séquentielProgramme stocké en mémoire : facile à modifier

Microprocesseur d’usage général(General Purpose Processor, GPP)
• Intel Pentium• Motorola PowerPC, 68000• Digital Alpha Chip
• Nombreuses fonctionnalités pas toujours utiles– Augmente le coût et la • Digital Alpha Chip
• Sun SPARC• PXA250 (RISC)
• Formats de données variés– sur 32 ou 64 bits
• Adaptés aux langages évolués• Bonnes performances en calcul
numérique
– Augmente le coût et la consommation électrique
• Gestion matérielle de la mémoire virtuelle– Nécessaire pour l’utilisation de
systèmes d’exploitation avancés
• Fonctionnalités dynamiques qui compliquent la garantie temps réel– Cache de données
• Bonnes performances en calcul numérique– Instructions spécifiques (MMX,
SSE…)
• Tendance aux évolutions multi-coeurs
– Cache de données
24

Microcontrôleur
• Motorola 68HC11
• Intel 8751
• Peu adapté aux signaux numériques• Intel 8751
• MicroChip PIC16/17
• Cypress PsoC
• Faible coût
• Faible consommation électrique
– Périphériques à faible débit
– Données sur 8 ou 16 bits
• Adaptés aux tâches de contrôle– Embarqué, temps réel
– Calculs logiques
électrique
• Mémoire limitée
• Utile pour calculs peu complexes
25

Processeur DSP
• Texas Instrument TMS320Cxxxx,
• Processeur– Programme en mémoire– Exécution séquentielle• Freescale 56000, 96000
• Analog Devices ADSPxxxx, SHARC, Blackfin
• Architecture spécialisée pour les traitements numériques
– Exécution séquentielle– Jeu d'instruction spécialisé
• Calculs numériques– Addition, Multiplication– Unités de calcul spécialisées
(filtrage, FFT…)
• Entrée-sortie de données– Grand débitnumériques
– Coût, encombrement et consommation au plus juste
– Grand débit– Périphériques intégrés
26

DSP et processeur d’usage général
• Un processeur DSP est préférable pour:
– Minimiser la taille
Minimiser la consommation– Minimiser la consommation
– Traitement temps-réel à grand débit
• Un processeur d’usage général est préférable pour:
– Disposer d’une grande quantité de mémoire
– Développer sous un système d’exploitation avancé
– Nécessité de mixer calcul numérique et autres tâches– Nécessité de mixer calcul numérique et autres tâches
27

Exemple : TMS320C6200 vs. Pentium
Processor Pea k MIPS
ISR la t ency
Pow er Un i t Pr ice
Area Volum e
Pent ium III 1200
2400 1.14 µs 4.25 W $29 5.5” x 2.5” 8.789 in 3
C6200 200 MHz
1600 0.09 µs 1.94 W $25 1.3” x 1.3” 0.118 in 3
C6200 300 MHz
2400 0.06 µs $96 1.3” x 1.3” 0.118 in 3
28
BDTImarks: Berkeley Design Technology Inc. DSP benchmark
results (larger means better) http://www.bdti.com/bdtimark/results.htm
Source: http://www.ece.utexas.edu/~bevans/courses/ee382c/lectures/processors.html

GPU (Graphics Processing Unit)
• Nombreuses unités de calcul indépendantes en parallèle• Streaming Processor (SP)• Texture Filtering Unit (TF)
• Programmation spécifique (CUDA, OpenCL…)
• NVIDIA • ATI
• Programmation spécifique (CUDA, OpenCL…)• Très efficace si GPU disponible (calcul scientifique, traitement d’image)• Risqué si contraintes de pérennité et de certification (aéronautique)
SP TF
29Nvidia GeForce 8800 Series GPU Block Diagram

FPGA (Field-Programmable Gate Array)
• Altera• Xilinx
• Logique reconfigurable– VHDL compilé puis chargé sur
la puce– Facile à reconfigurer (mais
pas en cours de fonctionnement)
• Produits récents intégrentdes blocs « DSP »
• Produits récents intégrentdes blocs « DSP »– Unités arithmétiques simples
• Adapté si calculs fortement parallélisables
30
Exemple d’architecture:Altera Stratix

ASSP (Application Specific Standard Product)
• Puce spécialisée pour une application spécifique– Peut être programmable ou pas
Décodage analogique, démultiplexage, décryptage, décodage MPEG2, interface vers sortie vidéo ou numérique, télétexte…
Exemple: Micronas MDE9500 « Single-chip DigitalTV mixed-signal decoder »Fonctionnalités nécessaires pour un poste de télé numérique
31

ASIC (Application-Specific Integrated Circuit)
• Puce conçue entièrement pour l'application visée– Parfaitement adapté à
• Conception prend du temps– Développement d'un circuit
– Parfaitement adapté à l’application
• Meilleures performances– Calcul et vitesse– Consommation
• Passage par un fondeur– Coûts de développement
élevés
– Développement d'un circuit complet en VHDL
• Cœurs licenciables– Intégration d’IP
• cœurs DSP
• modules d’E/S
– Permet la réutilisation de conceptions éprouvées
élevés– Peu flexible
conceptions éprouvées
– Personnalisation possible de l’architecture
32

Compromis pour l’implantationd’algorithmes de traitement du signal
ASIC ASSP GPPDSPFPGA
Matériel dédié Matériel génériqueComplexité dans le logiciel
Performance pour une application spécifiqueContraintes temps réel Flexibilité
33
Contraintes temps réelContraintes de consommation
FlexibilitéDélai de mise sur le marché
Coût de développement plus faible

Architecture d’unArchitecture d’un
processeur DSP
• Accès mémoire et E/S• Accès mémoire et E/S
• Unités du CPU
• Pipelining
34

Architecture générale d’un processeur
Processeur
CPUUnité decontrôle
Unités detraitement
Bus internes
CPU
35
Mémoireinterne
Unité deCommunication
Périphériqueset mémoire externes

Accès à la mémoire
36

Rappels : Bus
• Le CPU est le maître du bus– Il est le seul à écrire sur les
bus adresse et contrôlePériphériqueCPU BUS
bus adresse et contrôle
• Le périphérique obtempère sur le bus données– Lecture: il fournit la donnée
demandée
– Ecriture : il récupère la donnée fournie par le CPU
– Haute impédance: il se
PériphériqueCPU
adresses
données
contrôle
37
– Haute impédance: il se déconnecte du bus
Contrôle : lire / écrire / haute impédance
Adresses : sélection du périphériqueet d’une donnée en son sein
Données : valeur de la donnée à échanger

Etapes d’une opération de calcul
11
33
22
(1) Charger une instruction (Fetch)
(2) Décoder l’instruction (Decode)
MémoireCPU33
44
55
(2) Décoder l’instruction (Decode)
(3) Charger les opérandes (Read)
(4) Effectuer les calculs (Execute)
(5) Stocker le résultat
38

Architecture Von Neuman
Mémoire
• Un seul chemin d'accès à la mémoire• Architecture des processeurs d’usage général (Pentium, 68000)
CPU BUSMémoire
Programme+ Données
• Architecture des processeurs d’usage général (Pentium, 68000)• Goulot d'étranglement pour l'accès à la mémoire• Pas de sécurisation matérielle du programme
– Responsabilité dévolue au système d’exploitation (logiciel)
39

Architecture Harvard
Mémoire Programme
• Séparation des mémoires programme et données
• Moins de risque de corruption du programme
Mémoire Données
CPU
• Moins de risque de corruption du programme
• Meilleure utilisation du CPU– Chargement du programme et des données en parallèle
40

Architecture Harvard modifiée
Mémoire ProgrammeMémoire Programme
+ Données
• Mémoire programme contient des données
• Possibilité de charger 2 données en un cycle
CPU
+ Données
Mémoire Données
• Utilisation classique en TNS– Mémoire Programme+Données → coefficients des filtres
– Mémoire Données → échantillons d’entrée
41

Accès mémoire multi-port
Mémoire Programme+ Données
• Plusieurs bus de données– Accès simultané à plusieurs données
– Nécessite une mémoire multi-accès ou multi-blocs
CPU
+ Données
Mémoire Données
– Nécessite une mémoire multi-accès ou multi-blocs
• Exemple du TMS320C54xx :– 1 bus programme (P)
– 2 bus de lecture des données (C et D)
– 1 bus d’écriture des données (E)
42

Exemple
CPUMémoire Donnéesb[0]…b[N-1]x[0]…x[N-1]
Bus C
x[0]…x[N-1] Bus D
Pour l’opérationy[n] ← b[n] * x[n]
On souhaite récupérer b[n] et x[n]
Chaque bus est capable de transmettre 1 donnée par cycle
43
Chaque bus est capable de transmettre 1 donnée par cycle
La limite est imposée par les capacités de la mémoire:- Mémoire à Simple Accès (SARAM) => 2 cycles - Mémoire à Double Accès (DARAM) => 1 cycle- Mémoire externe => temps de latence dépend de la qualité de la mémoire

Multiplexage spatial(Mémoire multi-blocs)
• Découpage en blocs indépendants– Accès simultané à deux blocs distincts
• Exemple
CPUb[0]…b[N-1]
Bus C
Bus Dx[0]…x[N-1]
• Exemple– b[n] stockés dans le bloc 1, x[n] stockés dans le bloc 2
Bus C
Utilisation desressources
Adresses@b[0] sur bus C@x[0] sur bus D
b[0] et x[0]lus par le CPU
Adresses@b[1] sur bus C@x[1] sur bus D
b[1] et x[1]lus par le CPU
Adresses@b[2] sur bus C@x[2] sur bus D
44
Bus D
Bloc 1Bloc 2
…1 cycle
b[0]
x[0] x[1]
b[1]
temps
Traitement simultané des requêtes des deux bus

Multiplexage temporel(Mémoire multi-accès)
• Plusieurs accès à la même mémoire en un cycle– Le CPU récupère cependant une donnée par cycle et par bus
CPUMémoire Donnéesb[0]…b[N-1]x[0]…x[N-1]
Bus C
Bus DDARAM fonctionne à 2f0
Fréquence decycle f0
– Le CPU récupère cependant une donnée par cycle et par bus
Bus C
Utilisation desressources
Adresses@b[0] sur bus C@x[0] sur bus D
b[0] et x[0]lus par le CPU
Adresses@b[1] sur bus C@x[1] sur bus D
b[1] et x[1]lus par le CPU
Adresses@b[2] sur bus C@x[2] sur bus D
45
Bus C
Bus D
Mémoire
1 cycle
b[0] x[0] x[1]b[1]temps
Ordonnancement des requêtes des deux bus

Mémoire interne sur les processeurs C54x
Capacité en mémoire interne de différents modèles C54x
Découpage en blocs
• Plusieurs types de RAM incluse sur le chip– Single access (SARAM) : un accès par cycle– Dual access (DARAM) : deux accès par cycle– Two-way shared : deux accès par cycle même depuis l'extérieur
• DARAM découpée en blocs– Accès simultané à deux blocs de mémoire différents– 2x2=4 accès par cycle en théorie (en réalité limité par le reste de l'architecture)
46sources : "TMS320C54x DSP Functional Overview", SPRU307A, Texas Instrument"TMS320VC5416 DSK Reference Technical", Spectrum Digital

Cache d'instructions
DSP
Mémoire Programme+ Données
cached’instructions
• Cache = mémoire associative rapide– Contient les dernières instructions exécutées
• Utile en cas de boucle
+ Données
Mémoire Données
CPU
• Utile en cas de boucle– Accès aux instructions sans accès à la mémoire programme– Libère le bus pour des données, ou pour un gain en consommation
• Cache pour les données– Peu utilisé sur DSP classiques– De plus en plus utilisé sur les DSP hautes-performances– Peut poser des problèmes pour la validation du temps réel
47

Bus externedans une architecture Harvard
DSPMémoire Programme
+ Données
Transfert entre les bus
MUX
CPU
+ Données
Mémoire Données
48
Transfert entre les bus internes et externe par multiplexage temporel
• Limitation du nombre de broches • Réduction des coûts• Diminution des performances lors des accès au bus externe

Accès Direct à la Mémoire(DMA : Direct Memory Access)
• Mouvements de données– E/S direct entre
périphérique et mémoire périphérique et mémoire interne
– Déplacements au sein de la mémoire interne
• Indépendant du CPU– Configuration par le CPU
une fois pour toutes
– CPU prévenu du déroulement par interruptions
DMA
CPU Mémoire Interne
interruptions
configurationinterruptions• Buffer plein (en réception)
/ Buffer vide (en émission)
• Buffer à demi-plein
49
configuration
E/S
Périphériques(Port Série, Mémoire externe…)

DMA et buffer ping-pongpour le traitement par blocs
CAN
McBSP2 McBSP2
CNA
DSPCAN
DRR DXRCNA
DMA4 DMA5
PINGIN
PONG
PINGOUT
PONGTraitement
PINGIN1
PINGOUT
1
PONG
PINGIN3
PONG
50
PONGIN
PONGOUT
Traitement
Source: Texas Instruments C5000 DSP Teaching Kit
Buffers en mémoire Buffers en mémoire
PONGIN2
PONGOUT
2

Chronogramme des échanges de données
temps
Entrée CAN => BSP x[0] x[N-1] x[4N]… …x[N] x[2N-1]… x[2N] x[3N-1]…
BSP => PING IN
Traitement PING
BSP => PONG IN
Traitement PONG
… …… …
Interruptionbuffer mi-plein
Interruptionbuffer plein
Interruptionbuffer mi-plein
51
PING OUT => BSP
PONG OUT => BSP
BSP => Sortie CNA y[0] y[N-1]… y[2N] y[2N-1]…
Latence de 2 blocs

Architecture interne du CPU
52

Schéma de principe des échanges
SéquenceurGénération Génération
Registres etUnités de
CPU pilotage
addr
datactrl
Séquenceur
Bus
programme
Générationadresses P
Générationadresses D
Unités decalcul
53
addr
datactrl
programme
Bus
données
Mémoire P Mémoire D périphériques

Détail des unités
• Séquenceur– Décodage des instructions
– Pilotage les autres unités– Pilotage les autres unités
• Unité de génération d’adresse programme– Compteur de programme (PC)
– Gestion matérielle des boucles
• Unité de génération d’adresses données– Adressage indirect efficace (*p++)
– Adressage circulaire, bit-reverse– Adressage circulaire, bit-reverse
• Unités de traitement– Effectuent les calculs
– Registres pour résultats intermédiaires
54

Fetch (lecture instruction)
SéquenceurGénération Génération Unités de
addr
datactrl
Séquenceur
Bus
programme
Générationadresses P
Générationadresses D
Unités decalcul
PCInstruction
55
addr
datactrl
programme
Bus
données
Mémoire P Mémoire D

Read/Write (lecture/écriture donnée)
SéquenceurGénération Génération Unités de
SéquenceurGénérationadresses P
Générationadresses D
Unités decalcul
addr
datactrl
Bus
programme
ARi Donnée
56
Mémoire P Mémoire D
addr
datactrl
programme
Bus
données

Diagramme bloc du TMS320C5416
D(15-0)
Program/Data RAM128K Words
Program/Data ROM16K Words
Mémoireinterne
JTAG Test/EmulationControl
Bus externe
Muxed GP I/O
A(23-0)
Program/Data Buses
Timer
Ch 0
Ch 1
Ch 2
Ch 3
Ch 4
Ch 5
DMA
8/16-bit Host PortInterface (HPI)
Peripheral Bus
RND, SAT
17 x 17 MPY
40-Bit Adder
MAC
Shifter
40-Bit Barrel(-16, 31)
EXP Encoder
40-Bit ALUCMPS Operator(VITERBI)
ALU
Accumulators
40-Bit ACC A
40-Bit ACC B
Multichannel BufferedSerial Port (McBSP)
Multichannel BufferedSerial Port (McBSP)
Unités decalcul
ControlMUX
57
Ch 540-Bit ACC B
8 Auxiliary Registers
2 Addressing Units
Addressing UnitMultichannel BufferedSerial Port (McBSP)
PLL Clock Generator
S/W WaitstateGeneratorPower Management
Générationd’adresses
EntréesSorties
CPU

Structure interne du TMS320C54x
58
Source : Texas InstrumentsTMS320C54x DSPReference SetVol 1 : CPU and Peripherals

Unité de controle
Générationd'adressesprogramme
Générationd'adressesdonnées
Zero overhead looping Adressage indirect :Pré- et post-incrémentation
automatique
Bus Pprogramme
Bus C / Dlecture
59
lecturedonnées
Bus Eécrituredonnées
4 bus : Accès simultané à 1 instruction + 2 opérandes + 1 écriture

ALU
Shifter
Viterbi
Registres
60
MACViterbi
Calcul MAC en un cycle Multiplication par 2k en un cycle

Architectures des unités de traitement
• Architecture accumulateur
Couplage accès mémoire et calcul Accès mémoire et calcul découplés
• Architecture Load/Store
• Architecture à registres et mémoire
ACC
RAMR0
RAMR1
R2
R3registres et mémoire
61
R0
RAMR1
R2
R3
R3

Calcul d’un filtre RIF en N+2 cycles
( ) ( )∑−
=
−=1
0
)(N
i
inxibnyGestion matérielle des boucles :Unité de génération d’adresses programme
A=0;
for (i=0; i<N; ++i) {
=0i
B[i] X[i]Y
Unité de génération d’adresses programme
Unité MAC matérielle+ Chargement simultané de l’instruction et des opérandes
SSBX FRCTSTM #B, AR2
62
for (i=0; i<N; ++i) {
A = A + B[i] * X[i];
}
Y = A >> 15;Unité de génération d’adresses données
STM #X, AR3STM #Y, AR4
RPTZ A, #N-1 (x1)MAC *AR2+,*AR3+, A (xN)
STH A, *AR4 (x1)
Equivalent ASMCode C

Boucles matérielles / Zero overhead looping
• Répétition d’une Instruction (N) fois
RPTZ A, #54 ;A � 0 et RC � 54
RC N - 1
Instructions RPT et RPTZ
• Répétition d’un Bloc d’Instructions (N) fois
BRC N - 1
RPTZ A, #54 ;A � 0 et RC � 54
MAC *AR2+, *AR3+, A ;La valeur pointée par ;AR2 est additionnée à la ;valeur pointée par AR3, ;55 fois
STM #54, BRC ;Répétition 55 fois
RPTB fin-1 ;RSA chargé avec PC+2;REA chargé avec endblk-1
63
RSA Première
Adresse
REA Dernière
Adresse
Instructions RPTB et RPTBD
;REA chargé avec endblk-1
MPY *AR2+0%, A
LMS *AR3, *AR2
ST A, *AR3+
fin :
STH A, *AR3
RSA
REA

Utilisation de l’adressage indirect
; A accumulateur; X=@X[0], Y=@Y[0]
long A;int X[100],Y[100];int *px, *py;
Produit scalaire entre deux vecteur
LD #X, AR2LD #Y, AR3
RPTZ A, #99 MAC *AR2+, *AR3+, A
int *px, *py;
px=X;py=Y;A=0;for (i=0; i<100; ++i)A = A + (long)(*px++)*(*py++);
Y[i]X[i]
64
; AR3=@Y[idx] déjà assigné
LD #X, AR2STM #N,BK
RPTZ A, #99 MAC *AR2+, *AR3+%, A
A=0;for (i=0; i<=99; ++i) {idd = idx + i;A = A + (long)X[i] * Y[idd%N];
}
Filtre RIF avec buffer circulaire (voir chapitre « Mise en œuvre de filtres RIF et RII »)

Adressage indirect bit-reverse
• Ordre des données pour la FFT
x(0)
x(1)
x(2)
x(3)
x(4)
x(5)
65
Ordrebit-reverse
Ordrenaturel
Implémentation récursive de la FFT
X(k) = TFD( x(n) )Ordrenaturel
x(6)
x(7)
Réorganisation des données

Unité d’adressage indirect(Génération d’adresses données)
Registres d'adressage Unités de calcul spécialisées
Ecriture sur les bus d'adresse des bus C, D et E
66

Optimisation de la part du compilateur C
813D toto813D PSHM 11h Sauvegarde AR1 (save-on-entry)813E FRAME -1813F SSBX SXM Manipulation de nombres signés8140 LD #100h,0,A A <= 256 (100h)
#define N 256
short in[N];short out[N];
Code C Pas d’optimisation
8140 LD #100h,0,A A <= 256 (100h)8142 ST #0h,0h Met la valeur initiale 0 de i dans pile[0h]8144 SUB 0h,A A <= A - pile[0h]8145 BC 8154h,ALEQ Si A<=0, alors aller à fin:
debut :8147 MVDK 0h,11h Copie pile[0h] dans AR18149 LD *AR1(817),A Charge in[AR1] dans A814B STL A,*AR1(1073) Stocke A dans out[AR1]814D LD #100h,0,A A <= 256 (100h)814F ADDM 1h,0h pile[0h] <= pile[0h] + 18151 SUB 0h,A A <= A - pile[0h]8152 BC 8147h,AGT Si A>0 alors reboucler sur debut:
fin:8154 FRAME 1
void toto()
{
int i;
for (i=0; i<N; i++) {
out[i]=in[i];}
}
Adresses des tableaux
67
8033 toto8033 STM 431h,13h AR3 <= @out8035 STM 331h,12h AR2 <= @in8037 RPT #0ffh Répéter 256=255+1 fois8038 MVDD *AR2+,*AR3+ *AR3 <= *AR28039 NOP 803A NOP 803B FRET
8154 FRAME 18155 POPM 11h Restaure de AR18156 FRET Retour de la fonction
Optimisation au niveau fonction (-o2)
_inputData = 331h = 817_outputData = 431h = 1073
Adresses des tableaux
Prise en compte descapacités matérielles du DSP

Pipelining
68

Pipelining
• Instructions segmentées en étages
• Exécution entrelacée de plusieurs instructions
• Exemple du TMS320C54xx :pipeline à 6 étages– Prefetch (P)
• Incrémentation du PCinstructions– Chacune à une étage différent
• Augmentation de la fréquence d'horloge– Etages plus simples donc plus
rapides
• Géré par le séquenceur
• Incrémentation du PC(Program Counter)
– Fetch (F)• Lecture de l’instruction en
mémoire
– Decode (D)• Décodage de l’instruction
– Access (A)• Calcul des adresses des
opérandesopérandes
– Read (R)• Lecture des opérandes en
mémoire• Calcul de l’adresse du résultat
– Execute (X)• Exécution du calcul• Ecriture en mémoire
69

Séquentiel vs pipeline
t1 t2 t3 t4 t5 t6 t7 t8
Instruction Instruction 1 Instruction 2
Fetch F1 F2
-
-
MemP
D1
F1
t1 t2 t3 t4 t5 t6 t7 t8
Fetch F1 F2 F3 F4 F5 … … …
Fetch F1 F2
Decode D1 D2
Read R1 R2
Execute X1 X2
Exécution séquentielle
F4 MemPF5
-
-
-
MemD
MemD
CPU D1
R1
X1
Fetch F1 F2 F3 F4 F5 … … …
Decode D1 D2 D3 D4 D5 … …
Read R1 R2 R3 R4 R5 …
Execute X1 X2 X3 X4 X5
70
Amorçage du pipeline
Exécution avec pipeline : entrelacement des instructions
D3
R2
X1
MemD
MemD
CPU D4
R3
X2

Retards dans le pipeline
• Le pipeline atteint son plein rendement une fois qu’il est amorcé
Une retard peut se produire• Une retard peut se produire
– en cas de rupture de séquence (vidange du pipeline)• branchement mal prédit
• appel de sous-programme
• interruption
– s’il existe un conflit de ressources (retard ponctuel, “bulle” – s’il existe un conflit de ressources (retard ponctuel, “bulle” dans le pipeline)• accès à la mémoire
• utilisation des bus
71

Exemple de rupture de séquence
Code à exécuter :1: Instr12: Si B==1 Alors GOTO 10:3: Instr3
…10: Instr1011: Instr11
t1 t2 t3 t4 t5 t6 t7 t8
F F1 F2 F3 F4 F5 F10 F11 F12
3: Instr34: Instr45: Instr56: Instr6
t1 t2 t3 t4 t5 t6 t7 t8
F F1 F2 F3 F4 F5 F6 … …
Si prédiction incorrecte (B=1) Si prédiction correcte (B≠1)
11: Instr1112: Instr12…
Etat du pipeline avec prédiction que B≠1 :
72
F
D D1 D2 D3 D4 ! D10 D11
R R1 R2 R3 ! ! R10
X X1 X2 ! ! !
F
D D1 D2 D3 D4 D5 D6 …
R R1 R2 R3 R4 R5 R6
X X1 X2 X3 X4 X5
Vidange du pipeline:Perte de 3 cycles
Evaluation du prédicat (B==1)=> rupture de séquence
Evaluation du prédicat (B==1)=> pas de rupture

Exemple de conflit d'accès mémoire
Programmes et Données dans la même mémoire à 1 accès par cycle
t1 t2 t3 t4 t5 t6 t7 t8
�Conflit pour l’accès mémoire entre Fetch et Read
�Les lectures de données R1/R2 empêchent les chargements d'instruction F3/F4
�Réductions des performances d'au moins 50%
Fetch F1 F2 conflit conflit F3 F4 ! !
Decode D1 D2 ! ! D3 D4 !
Read R1 R2 ! ! R3 R4
Execute X1 X2 ! ! X3
88
�Réductions des performances d'au moins 50%
�Problème réglé si
�Mémoire multi-accès
�Programmes et Données dans des mémoires différentes (ou multi-bloc)

Effets du pipeline lors du débogage
Code à exécuter :1: A=12: B=1
Watch WindowA 1B 1C 1
La flèche indique la position du PCPlusieurs cycles sont nécessaires 2: B=1
3: C=1… NOP …10: A=211: B=212: C=213: D=214: E=2…
C 1
Watch WindowA 1 ???B 1C 1
Watch WindowA 2 !!!
t1 t2 t3 t4 t5 t6 t7 t8
F F10 F11 F12 F13 F14 … … …
Plusieurs cycles sont nécessaires avant que la variable soit modifiée :Cela n’intervient qu’à l’étape X (exécution)
74
A 2 !!!B 1C 1
D D10 D11 D12 D13 D14 … …
R R10 R11 R12 R13 R14 …
X A=2 B=2 C=2 D=2 E=2
Watch WindowA 2B 2C 1

Résumé caractéristiques des DSP
• Câblage des opérations les plus critiques– Unités de calculs spécialisées
• Opération MAC cablée
– Modes d’adressages spécialisés• Accès en mémoire selon des schéma prédéfinis
– Boucle matérielle• Pas de perte de temps pour les instructions répétées
• Gestion des entrées/sorties intégrée• Gestion des entrées/sorties intégrée– Mémoire, DMA, timers
– Interfaces série / parallèle
– Interruptions à faible latence
75

Résumé caractéristiques des DSP (2)
• Augmentation du parallélisme
– Calculs• Unités de calcul en parallèle• Unités de calcul en parallèle
– Mémoire à accès multiples• Lecture/Écriture de plusieurs données simultanément
• Augmentation de la fréquence d’horloge
– Pipelining
• Découpage des instructions de façon à les exécuter à intervalles • Découpage des instructions de façon à les exécuter à intervalles plus rapprochés
76

Mesures des performances
MFLOPSMillion Floating–Point Operation Per Second
Mesure le nombre d’opérations
arithmétiques à virgule flottante que le
DSP à virgule flottante peut réaliser
en une secondeen une seconde
MOPSMillion Operation Per Second
Mesure le nombre total d’opérations
(calcul, accès DMA, transferts, etc.) que
le DSP peut réaliser en une seconde
MIPSMillion Instructions
Per Second
Mesure le nombre de codes machine
(instructions) que le DSP peut réaliser
en une seconde
MMACSMillion of MAC Mesure le nombre d’opérations MAC
(Multiply+Accumulate) que le DSP peut
77
MBPSMega-BytesPer Second
Mesure la bande passante d’un bus
particulier ou d’un dispositif d’E/S
MMACSper Second
(Multiply+Accumulate) que le DSP peut
réaliser en une seconde

Performances pour une application (benchmarking)
• Pour avoir une idée des performances concrètes des DSP, seul reste le benchmarking
• Benchmarks effectués par des sociétés de conseil telles que– Berkeley Design Technology Inc. (www.bdti.com)– Berkeley Design Technology Inc. (www.bdti.com)
– Embedded Microproc. Benchmark Consortium (www.eembc.org)
• Spécifications générales des benchmarks:– SPEC95: couvre plusieurs domaines tels que les vocodeurs, les
modems, les applications multimédia
Algorithme Standard
78
de Traitement du Signal
Temps d’exécutionConsommation électrique

Les évolutions récentes dans
• SIMD
Les évolutions récentes dans
l’architecture des DSP
• SIMD
•MIMD / VLIW
• Puces multi-cœurs
79

Perspective historique
1970 1971: Intel 40041972: Intel 80081974: 1er microcontrôleur : TMS1000
1er ordinateur personnel (8008)
1980
1990
1er ordinateur personnel (8008)1979: 1er DSP single-chip : Bell Labs Mac 4
Intel 80861980: 1er DSP autonome : NEC µPD77101981: IBM PC (8088)1983: 1er succès commercial pour un DSP : TMS320C101986: MIPS -> R2000, premier microprocesseur RISC commercial1989: Intel 486 (Utilisation d’un pipeline)1993: Intel Pentium, PowerPC 6011996: 1er DSP VLIW : TMS320C62xx
80
2000
1996: 1er DSP VLIW : TMS320C62xx1997: Jeux d’instruction MMX, 3DNow!, Altivec1999: Pentium III (Jeu d’instruction SSE)2000: Pentium 42004: Jeu d’instruction SSE32005: Cell processor2006: Pentium Core Duo2007: TMS320DM6467 (SoC DSP+ARM Traitement Vidéo)

Historique des DSP
• 1e génération 1979– Architecture Harvard
• 4e génération 1992– Image et vidéo
– Processeurs faible – Architecture Harvard
– Multiplieur cablé
• 2e génération 1985– Parallélisme
– Bus multiples
– Mémoire sur la puce
• 3e génération 1988
– Processeurs faible consommation
• 5e génération 1996– SIMD
– VLIW
• Plus récemment– SoC DSP
• 3e génération 1988– Virgule flottante
• Homogènes (Multi-DSP)
• Hybrides (RISC+DSP)
– Co-design hardware-software
81

Limites des architectures conventionnelles
Processeur DSP conventionnel = Harvard + Câblage des opérations critiques
• Performances bornées– Limite physique à l’augmentation des fréquences d’horloge
• Architecture très spécialisée– Jeux d’instructions CISC irréguliers
– Peu de portabilité
– Inefficacité des optimisation automatiques du compilateur– Inefficacité des optimisation automatiques du compilateur
– L’optimisation nécessite du savoir-faire
• Peu de parallélisme– …ou alors très limité
– Exemple: MACD = ADD + MPY + MOV
82

Vers plus de parallélisme…
• SISD = Single Instruction, Single Data
• SIMD = Single Instruction, Multiple Data• SIMD = Single Instruction, Multiple Data
• MIMD = Multiple Instruction, Multiple Data
A1 B1 A2 B2
Instruction 1ADD
Données 1 Données 2
Instruction 2MUL
MIMD
InstructionADD
Données 1 Données 2
SIMD
InstructionADD
Données 1
SISD
83
ALU1 ALU2
A1 B1 A2
R1 = A1 + B1
B2
R2 = A2 × B2
ALU1 ALU2
A1 B1 A2
R1 = A1 + B1
B2
R2 = A2 + B2
ALU1
A B
R = A + B

L’approche SIMD…
• SIMD = Single Instruction Multiple Data
• Introduit sur les processeurs d’usage général• Introduit sur les processeurs d’usage général– MMX (Intel), 3DNow! (AMD)
– SSE (x86), Altivec (PowerPC, Cell)
InstructionADD
Données 1 Données 2
SIMD par unités parallèles
A ← [A1,A2]B ← [B1,B2]
Instructionpacket_add
Données
SIMD par partage d’unité
84
ALU1 ALU2
A1 B1 A2
R1 = A1 + B1
B2
R2 = A2 + B2
Données 1 Données 2
ALU
B ← [B1,B2]
B
R = packed_add(A,B)
Données
A
R → [A1 + B1, A2 + B2]
Empaquetage des données
Dépaquetage des données

SIMD : exemple de l’extension SSE Addition de deux vecteurs
•Code C séquentiel •Code C vectoriséSSE=Streaming SIMD Extensions
r ← a + b
/* Déclaration de 4 vecteurs 32 bits */
float a[4], b[4], r[4];
/* Addition case par case */
On note pa, pb, pr les addresses respectives de a, b et r en mémoire.
/* Copie de a[0..3] dans le registre XMM */movaps xmm0,pa
/* Addition SSE SIMD (packed_add 128 bits) */addps xmm0,pbfor (i=0; i<4; ++i)
r[i] = a[i] + b[i];
addps xmm0,pb
/* Copie du résultat en mémoire r[0..3] */movaps pr,xmm0
85http://www.cs.utk.edu/~vose/Intel/IntelArchitectureOptimization.pdf
La recopie des données de/vers les registres vectorisés XMM prend du temps=> limiter au maximum les transferts entre registres XMM et mémoire RAM

SIMD: implications architecturales(exemple du TMS320C54x et du C55x)
2 bus de lecture : C+D
x y x1 y x2 y
3 bus de lecture : B+C+D
2 RegistresA, B
MAC
1 bus d’écriture : E
MAC1 MAC24 RegistresAC0,…AC3
x y x1 y x2 y
2 bus d’écriture : E+F
C54x C55x
86D’après: http://focus.ti.com/lit/ug/spru307a/spru307a.pdf D’après: http://focus.ti.com/lit/ug/spru393/spru393.pdf
Opération MAC SIMD:MAC *AR2+, *CDP+, AC0
:: MAC *AR3+, *CDP+, AC1
Opération MAC SISD:MAC *AR2+, *AR4+, A
y est partagé par les deux opérations MAC=> Coefficient commun(sinon, 4 bus de lecture auraient été nécessaires)
2 bus d’écriture : E+F

SIMD: granularité du parallélisme(exemple du TigerSHARC)
Le TigerSHARC d ’Analog Devices met en œuvre deux types de SIMD :- SIMD par unités parallèles (exemple TMS320C55x par rapport au C54x)- SIMD par partage de chaque unité de traitement (comme MMX)
MACALU Shift MACALU Shift
Instruction MAC SIMD
Unité decalcul n°1
Unité decalcul n°2
SIMD par unités parallèles 64 bits
- SIMD par partage de chaque unité de traitement (comme MMX)
87
4 multiplications 16 bitsau lieu de
1 multiplication 64 bits
4 multiplications 16 bitsau lieu de
1 multiplication 64 bits
SIMD par partage de
l ’unité de traitement
(split-MAC)

L’approche MIMD… (architecture VLIW)
• Plusieurs unités de calcul en parallèle
– Unités indépendantes (en général distinctes)– Unités indépendantes (en général distinctes)
– Augmentation forte du parallélisme
• VLIW = Very Long Instruction Word
– Notion de super-instruction (bundle)…
– …découpée en sous-instructions destinées à des unités distinctes (slots)distinctes (slots)• 1 Instruction Word = 1 bundle composé de N slots
– Taille du code machine fortement augmentée• Bande passante depuis la mémoire importante
88

Exemple de VLIW RISC(TMS320C62x, Texas Instruments)
• MIMD de type VLIW– 4 unités de calcul en parallèle
par data-path (4 slots)
• Opération MAC décomposée en opérations élémentairespar data-path (4 slots)
– Archi. Load/Store à 16 registres
• Jeu d’instruction RISC– L : Logique et Arithmétique
– S : Décalage (ALU et Shifter)
– M : Multiplication
– D : Données (Mouvement de
élémentaires– Load (Unité D)
– Multiply (Unité M)
– Add (Unité L)
Data Path 1
Register File A– D : Données (Mouvement de données de/vers la mémoire)
• Optimisation figée à la compilation
89RAM
L1
Register File A
S1
A15-A0
++
M1
xD1++

Exemple de VLIW RISC (2)(TMS320C62x, Texas Instruments)
• 2 chemins de données (data-path)– 4 unités de calcul en parallèle par
data-path
C62x/C67x CPU
Instruction Fetch Control Registers
Interru
pt
Control
data-path
• En tout– 8 slots
– Mot instruction de 256 bits = 8*32bit
• Bilan :– Augmentation du parallélisme et des
fréquences d’horloge (car unités RISC plus simples)
Data Path 2Data Path 1
L1
Register File A
M2D2 S2 L2
Instruction Decode
Instruction Dispatch Registers
Interru
pt
ControlEmulation
S1
A15-A0
+ + +x+M1
xD1+
Register File BB15-B0
+plus simples)
– Taille du code beaucoup plus grande
90
++ +
++x+x ++
Dual 32-Bit Load/Store Path(Dual 64-Bit Load Path - C67x only)

Exemple de VLIW CISC(Jazz D4, Improv Systems)
• MIMD à 4 slots VLIW
Registres locaux
Registres locaux
Registres locaux
Registres locaux
• MIMD à 4 slots VLIW– Registres locaux à chaque unité– Unités peuvent être hétérogènes
• Jeu d’instruction CISC/DSP– Présence d’unités MAC
• Design matériel reconfigurable / SoC– Processeur 16 ou 32 bits– 1 à 4 slots VLIW
Bus d’interconnection
Unité2(ALU, MAC,
Shift)
Unité3(ALU, MAC)
Unité4(ALU, MAC)
Unité1(ALU, MAC,
Shift)
Mémoire–– Compression du code machine
91
Jazz D4
http://www.improvsys.com/products/JazzDSP/Jazz_DSP.pdf

Bilan approches SIMD et MIMD
• Augmentation des performances– Par augmentation du parallélisme– Nécessaire pour les applications exigeantes
• Vidéo, TV numérique, multimédia, cartes graphiques• Téléphonie 3G et plus• Imagerie médicale, radar
• Nécessitent une optimisation spécifiqueIl faut que l’algorithme s’y prête– SIMD => Vectorisation des calculs– MIMD => Optimisation de l’utilisation des différentes unités
• Processeurs génériques avec fonctionnalités SIMD DSP• Processeurs génériques avec fonctionnalités SIMD DSP– Certains processeurs peuvent surpasser les DSP en puissance brute
• Filtre RIF: Pentium 1.3GHz plus rapide qu’un C67xx à 225MHz
– Mais moins bons pour :• la consommation électrique, la gestion des entrées-sorties, le prix
92

Puces multi-processeurs…
• Multi-cœurs– Nombre de cœurs x4 => Performances x4 ???– Nombre de cœurs x4 => Performances x4 ???
– Attention à la limitation au niveau des communications• Flux de données avec la mémoire et l’extérieur
• Echanges de données entre les cœurs
• La programmation doit explicitement prendre en compte les multiples cœurs
• Puces hybrides– Processeur générique (Pilotage du système)
+ DSP (Traitement du Signal)• Exemple: téléphone portable
– GPP = gestion du clavier, de l’affichage, du réseau…
– DSP = compression audio, communication numérique
93

Processeurs DSP conventionnels multi-cœurs
• Gravure sur la même puce de deux cœurs puce de deux cœurs DSP indépendants
• Communication entre les deux
– Mémoire partagée
– Interface FIFO– Interface FIFO
94Architecture du C5421
Shared memorytwo-way RAM : permet l'accès simultané à la mémoire par les deux cœurs DSP, par exemple
pour l'exécution parallèle du même programme

DSP System on a Chip (DSP SoC)
• ARM + DSP + modules vidéo– Spécialisé traitement
vidéo/multimédia– Encodage/décodage matériel – Encodage/décodage matériel
temps-réel
• Outils de développement– Linux embarqué– Librairies de codecs multimédia
logiciels adaptés
• Exemples– Texas Instruments: DaVinci
• DM335 : ARM+coprocesseur • DM335 : ARM+coprocesseur MPG4+vidéo
• DM6437: DSP+vidéo• DM644x, DM646x :
ARM+DSP+vidéo
95

Processeur Cell (Sony/Toshiba/IBM)CBEA = Cell Broadband Engine Architecture
• Parallélisme– 8 SPE indépendants en
parallèle– Capacités SIMD du PPE – Capacités SIMD du PPE
et des SPE
• Haut-Débit– Fréquence d’horloge
élevée / architecture simple (3.2GHz)
– Bus d’interconnexion très haut-débit (EIB)
– Usage intensif de transferts DMA asynchrones
• Programmation– Extensions vectorielles
au Langage C– SDK basée sur outils
GNU/Linux
96
1 PPE(Power Processor Element)
64 bits PowerPCContrôleur général
8 SPE(Synergistic Processor Elements)
Calcul vectorisé sur mots de 128 bitsPossèdent une mémoire locale rapide
Image: http://www-128.ibm.com/developerworks/power/library/pa-fpfeib/
Introduction to the Cell multiprocessor: http://www.research.ibm.com/journal/rd/494/kahle.html

Développement pour
la plateforme DSPla plateforme DSP
Texas Instruments
• Outils de développement• Outils de développement
• Organisation de la mémoire
97

Carte de développement (DSK 5416)Mémoireexterne
Plateforme de
Protocole JTAGsur lien USB
(CPLD)ROM
SARAM
DARAM
Mémoireinterne
Plateforme de développement
ProcesseurDSP
98
DARAM
source : "TMS320VC5416 DSK Reference Technical", Spectrum Digital
Carte DSK

Développement pour processeur DSP
• Mise au point de l ’algorithme– Prototypage, simulation haut-niveau
• Matlab• Matlab• Langage C sur PC
• Implémentation DSP– Développement sur carte d'évaluation
• Langage C• Cartes EVM, SDK• Noyau temps-réel (DSP/BIOS)
– Optimisation des parties critiques• Assembleur• Assembleur
– Outils de débogage• Simulateur• Émulateur• Boundary scan JTAG• Communication temps-réel avec un PC hôte
99

Développement pour un DSP
*.cCompilateur
C
Outils deconception
*.asm
Assembleur *.lst*.obj
Linker *.map*.cmd
IDE *.asm
Editeurde Texte
*.out
100
� Simulateur� DSP*.hex
Chargementsur la cible

C vs. assembleur
• Langage C– Langage de plus haut-niveau
• Plus rapide à coder
• Assembleur– Langage bas-niveau
• Fastidieux• Plus rapide à coder• Meilleure portabilité
– Code machine généré moins efficace• Malgré l’optimisation par le
compilateur
– Outils de développement• Noyau temps-réel
(DSP/BIOS)
• Fastidieux• Jeux d’instructions
complexes et irréguliers• Spécifique à chaque
constructeur
– Plus puissant• Accès direct à certains
registres inconnus du C• Instructions spécifiques DSP(DSP/BIOS)
• Configuration de la carte• Librairies de calculs
optimisées (DSPLIB)
•– Utile pour l’optimisation
• ...ponctuellement sur les fonctions identifiées comme critiques
101

Environnement Intégré de Développement (Integrated
Development Environment : IDE)
102

Vue synoptique des modules utiles
DsplibUser ApplicationLogiciel applicatif
CSLDSP/BIOS™Kernel/Scheduler
DsplibImglib
BSL
User Application
Abstraction du matérielet système d’exploitation
Logiciel applicatif
Drivers
103
Carte DSK
USB/JTAG DSP CODEC LED
Boutons
CPU Timer EMIF McBSP
Matériel

Support Libraries (CSL/BSL)
• Abstraction du matériel à travers une API logicielle– Améliore la portabilité
C54x™ DSP Modules
CHIP
• Chip Support Library (CSL)– Bibliothèque facilitant l'utilisation des périphériques
internes du DSP• DMA, BSP, IRQ…
– Méthodes standards d'accès aux périphériques
– Accessible depuis le langage C
• Board Support Library (BSL)
CHIP
DAA
DAT
DMA
EBUS
GPIO
HPI
IRQ
MCBSP• Board Support Library (BSL)– Bibliothèque facilitant l’utilisation des périphériques sur
la carte DSK• Switches, LEDS…
104
MCBSP
PLL
PWR
UART
WDTIM

Système temps-réel DSP/BIOS
• Noyau temps-réel– Ordonnanceur temps-réel
– Gestion multi-threads préemptive– Gestion multi-threads préemptive
• Outils d'analyse temps-réel– Débogage sans interruption de l'exécution
– Profiling, vision des threads
• Intégration avec– Real-time data exchange (RTDX)– Real-time data exchange (RTDX)
• Communication hôte↔DSP pendant l'exécution
– Chip Support Library (CSL)
105

Stratification des traitements sous DSP/BIOS
Interruptions matérielles
Hard Real-time
1st-TIER� Traitement par échantillon� Réaction à la microseconde
Interruptions logicielles
Multi-tâche
2nd-TIER� Traitement par blocs� Réaction à la milliseconde
� Réaction à la microseconde
� Traitements ordonnancés� Exécution concurrente
106
Multi-tâche
Tâche de fond (idle)
Soft Real-time
� Exécution concurrente
� S'il reste du temps

Propriétés des systèmes temps-réel
• Piloté par évènements– Synchrones (chronomètre)– Asynchrones (interruptions des E/S)– Asynchrones (interruptions des E/S)
• Contraint dans le temps– Contraintes dures (deadlines critiques)– Contraintes souples (deadlines non critiques)
• Concurrence de l'exécution– Plusieurs traitements en parallèle– Nécessite un ordonnancement
• multi-tâches (plusieurs traitements à la fois)• multi-tâches (plusieurs traitements à la fois)• préemptif (toute tâche peut être interrompue par une tâche plus
prioritaire)
• Déterministe et fiable– Comportement du système prédictible
107

Librairies spécialisées (DSPLIB, IMGLIB)
• Librairie déjà optimisée– Traitement du signal ou des images
– Déjà programmées– Déjà programmées
– Optimisées
– Utilisables depuis le langage C
• Fonctionnalités de base– FFT
– Filtrage– Filtrage
– Mathématiques et trigonométrie
– Calcul matriciel
108

Outils de débogage
• Type d’outils– Emulateur
• Communique avec le DSP à grande vitesse
Emulateurou
Contrôleur JTAG
IDEDSP
vitesse• Capable de simuler/enregistrer en
temps-réel l’état interne exact du DSP
– Boundary-scan (JTAG)• Protocole intégré au sein du
processeur• Interrompt le DSP pour accéder à
l’information
• Opérations– Interruption et relance de l’exécution
• Chargement du code
Récupération des donnéesdepuis la mémoire du DSP
Définition de breakpointset modification des variables
• Chargement du code• Breakpoints
– Accès en lecture/écriture• Visualisation et modification du
contenu mémoire• Registres internes
109

Boundary Scan (JTAG) vs In-Circuit Emulator (ICE)
Emulateur ICEGestion avancée temps-réel
Emulateur JTAG Externe(GAO XDS510PP JTAG Scan Path)
www.gaotek.com
110http://www.embedded-computing.com/products/product_guide/emulators/index.shtml
Gestion avancée temps-réel(trace, détection d’évènements complexes,
statistiques…) (Lauterbach TRACE32-ICE)
Contrôleur JTAG intégré à la carte(DSK C5416)
Image: http://www.logic-instrument.com/gamme-33.html

Affichage du code désassemblé
#define N 256
short inputData[N];short outputData[N];
void toto()void toto()
{
int i;
for (i=0; i<N; i++)
{
outputData[i] = inputData[i];
}}
111
Compilation et édition des lienspuis affichage du code désassemblé« Mixed Source/ASM »

Organisation mémoire
112

Structuration hiérarchique de la mémoire
• Carte mémoire– Carte mémoire physique
• Associe à chaque adresse une connexion vers une mémoire physique• Configuration matérielle statique spécifique à chaque processeur• Configuration matérielle statique spécifique à chaque processeur• Configurable dans une certaine mesure (MP/MC, DROM, OVLY)
– Carte mémoire logique• Blocs d’adresses logiques nommés• Position et taille définies statiquement• Doit être compatible avec la carte physique
– Sur architecture Harvard, attention à bien différencier les espaces d’adresses données et programme
• Section relogeable– A l’intérieur d’un bloc logique– A l’intérieur d’un bloc logique– Taille décidée lors de l’édition des liens, en fonction de son contenu
• Variable / Portion de code– A l’intérieur d’une section– Position dans la section décidée lors de l’édition des liens
113

Architecture mémoire logique et physique
DSP
Espace
Vue logique simplifiéede l’architecture Harvard
Vue physique
ROM
SARAM
DARAM
Mémoireinterne
CPU
SRAM Mémoireexterne
Bus Bus
Mémoire Programme
CPU
Espace d’adresses programme
Espace d’adresses données
Mémoire Données
114
Bus programme
Busdonnées
Chaque mémoire est physiquement câblée pour ne répondre qu’à certaines adresses logiques dans chaque espace d’adresses.La carte mémoire permet de déterminer le lien entre adresses logiques et mémoires physiques.

Carte mémoire Prog et Data (C5416)
PROG
Registres MMR(Accès accumulateurs et registres de configuration)
DATA
Reserved
DARAM03
registres de configuration)
Utilisé par le DSP/BIOS
DARAM03
Overlay :DARAM03 est
accessible par les deux espaces
Deux espaces mémoires distincts :0x8000 pointe sur deux cases
External
ROM
115
Routines d'interruption(géré par le DSP/BIOS)
DARAM47 accessible uniquement par adresses données
DARAM47
deux cases physiques distinctes
Carte mémoire obtenue d’après la documentation du DSK5416 lorsqueMP/MC=0, OVLY=1, DROM=0. D’autres valeurs conduiraient à des cartes différentessource : "TMS320VC5416 DSK Reference Technical", Spectrum Digital

Notion de mémoire étendue (Prog)
Mémoire accessible avec adresses 16 bits(0x0000 à 0xFFFF)
Mémoire étendue,accessible grâce à la pagination par le registre XPC
DARAM03
DARAM03 DARAM03 DARAM03 DARAM03
DARAM47 SARAM03 SARAM47
Reserved
116source : "TMS320VC5416 DSK Reference Technical", Spectrum Digital
Le registre XPC permet d’exécuter des fonctions dont le code est stocké en mémoire étendue, à l’adresse :
XPC × 0x10000 + PC
Le compilateur C gère automatiquement le XPC lorsque l’option far-calls est cochée.

Le fichier de commande
File_name1.obj
File_name2.obj
-o Name.out
Name.cmd� Noms des fichiers objet constituant l’exécutable final
� Noms des fichiers de sortie -m Name.map
MEMORY
{
PAGE 0 :
IPROG : origin = 0x7080, length = 0x0F00
VECT : origin = 0xFF80, length = 0x0080
SARAM03 : origin = 0x28000, length = 0x8000
PAGE 1 :
IDATA : origin = 0x0080, length = 0x7000
DARAM47: origin = 0x8000, length = 0x8000
� Carte mémoire :Définition des blocs mémoire statiques
� Noms des fichiers de sortie (exécutable et carte mémoire)
117
}
SECTIONS
{
.text : load = SARAM03 page0
.data : load = IDATA page1
.bss : load = IDATA page1
.coef : load = IPROG page0
}
� Positionnement des sections dans les blocs mémoire

Sections relogeables
Sections initialiséesSections initialisées Sections non initialisées pour les
donnéesCode VariablesCode ou constantes
Sections nommées (par l'utilisateur)
.sect .usect
118
Sections par défaut
.text .data .bss

Phase d'édition de liens
Positionnementdes sections en mémoire (*.cmd)
SARAM03
IDATA
mémoire (*.cmd)
119source : "TMS320C54x Assembly Language Tools User's Guide",ref. SPRU102F, Texas Instruments

Utilisation explicite des sectionsen assembleur
SECTIONS{
Déclaration des sections dans le fichier *.cmd :
{init: > IPROG page0vars: > IDATA page1 results: > IDATA page1 .text: > IPROG2 page0
}
.sect "init"
Déclaration des variables dans le fichier assembleur :
init: Section initialisée qui commence
120
.sect "init"tbl .int 1,2,3
x .usect "vars",3y .usect "result",1
.text…
init: Section initialisée qui commence à l’addresse tblvars: Section non initialisée de taille 3 qui commence à l’addresse xresult: Section non initialisée de taille 1 qui commence à l’addresse y.text: Section de code

Utilisation explicite des sectionsen Langage C
Pour placer un tableau ou une variable :
SECTIONS#pragma DATA_SECTION (tbl, "init")
Pour placer une fonction (c’est-à-dire le code machine correspondant):
Code C Fichier *.cmd
SECTIONS{init: > IPROG page1vars: > IDATA page1results: > IDATA page1
}
#pragma DATA_SECTION (tbl, "init")Int16 tbl[3]={1,2,3};#pragma DATA_SECTION (x, "vars")Int16 x[3];#pragma DATA_SECTION (y, "results")Int16 y;
121
Pour placer une fonction (c’est-à-dire le code machine correspondant):
SECTIONS{psec: > IPROG page0
}
#pragma CODE_SECTION (increment, "psec")Int16 increment(Int16 a) {return a+1;
}
Code C Fichier *.cmd

Représentation numériqueReprésentation numérique
du signal
• Echantillonnage / Quantification• Echantillonnage / Quantification
• Virgule fixe, format Qk
• Virgule flottante
122

Chaîne de Traitement Numériqueau sein d’une chaîne analogique
Signald’entrée
Signal Traité
Filtreanti-repliement
CAN CNAFiltre delissage
DSP
G
Echantillonage/Quantification Reconstruction
123
Signal analogique Signal analogiqueSignal numérique

Du signal analogique...
Signal AnalogiqueSignal Analogique
VoltsVolts • Valeurs continues de tension en fonction du temps
•Discrétisation en temps par
TempsTemps
•Discrétisation en temps par échantilloneur-bloqueur à fréquence
Signal Discrétisé en tempsSignal Discrétisé en temps
ffss = 1 / T= 1 / Tss
124
TempsTemps
TTSS
Discrétisation en temps

… vers le signal numérique
• Restriction des instants considérés
Signal EchantillonnéSignal Echantillonné
Valeurs continues
Signal NumériséSignal Numérisé
q
• Restriction des valeurs de magnitude possible
Valeurs continues
Valeurs discrètes
125
Discrétisationen amplitude
Valeurs discrètes

L’échantillonnage
126

Caractéristiques du signal échantillonné
Spectre de Fréquence du Signal AnalogiqueSpectre de Fréquence du Signal Analogique| X(f) |
fc
fs 2fs 3fs0
Spectre de Fréquence du Signal d’EchantillonageSpectre de Fréquence du Signal d’Echantillonage
127
fc fs 2fs 3fs0
Spectre de Fréquence du Signal EchantillonéSpectre de Fréquence du Signal Echantilloné| Xe(f) |

Théorème de Shannon
Fs > 2FcFs > 2Fc| Xe(f) |
fc fs 2fs 3fs0 4fs
fc fs 2fs 3fs0 4fs 5fs
Fs = 2FcFs = 2Fc| Xe(f) |
128
fc fs 2fs 3fs0 4fs 5fs 6fs 7fs
Fs < 2FcFs < 2Fc
Repliement de spectre
| Xe(f) |

Effets du repliement de spectre
AmplitudeAmplitudeSignal échantilloné à Signal échantilloné à
fs > 2fcfs > 2fc
TempsTemps
129TempsTemps
SignalSignal échantillonééchantilloné à à
fsfs < 2fc< 2fc

La quantification
• Uniforme
130
• Logarithmique

Quantification Uniforme
Pour un pas de quantification q :
=q
xX round Entier X associé au réel x
xxe −= ˆL’erreur de quantification est (écart entre la valeur réelle et la valeur quantifiée)
qXx =ˆ
=q
X round
Valeur approchée du réel x après quantification
q e
131
Erreur de granulationErreur de granulationErreur de granulationErreur de granulation Erreur de saturationErreur de saturationErreur de saturationErreur de saturationLiée à la précision q Liée à la dynamique [xmin, xmax]
0 1 2 3 4 5 6 7 8Temps
09
q
00 11 22 33 44 55 66 77 88Temps
xmax
99
ee

RSB de la quantification uniformeN bits signés
=−=
e
xdB
e
dB
xdBP
PPPRSB log10
Rapport signal sur bruit relatif à la quantification
q≤
)(log2077.402.6 max10 xPNRSB dBxdB −++≈
Le RSB de la quantification uniformede la quantification uniformede la quantification uniformede la quantification uniforme est donc, en l’absence de saturation :
2
qe ≤
12
2qPe =On peut alors montrer que la puissance de l’erreur est
Si arrondi au plus proche voisin
Pour un codage N bits signé , on a q=(2xmax)2-N
132
max10xdB
En introduisant le facteur de chargefacteur de chargefacteur de chargefacteur de charge Γ ,qui indique quelle est la dynamique utilisable par rapport à la puissance du signal x
x
σmax=Γ
( )Γ−+≈ 10log2077.402.6 NRSBdB

Seuil d’apparition de la saturation
La saturation se produit lorsque l’amplitude du signal à convertir dépasse xmax ou xmin
Le RSB se dégrade très rapidement dès qu’il y a saturation
Soit a l’amplitude du signal il y a saturation pour a>xmax
Pour un signal carré: Px=a2 saturation à 0 dB
Pour un signal sinusoïdal: Px=a2/2 saturation à -3.01 dB
Pour un signal uniforme sur [-a, a] : Px=a2/3 saturation à -4.77 dB
Pour un signal gaussien à moyenne nulle :
133
Dynamiques typiques :X sur N bits non signés => xmin=0 et xmax=q(2N-1)
X sur N bits signés en C2 => xmin=-q2N-1 et xmax=q(2N-1-1)
a ≈ 3σx (règle des 3 sigmas) d’où Px ≈ a2/9 saturation à -9.54 dB

Quantification uniforme et RSB
120Quantification uniforme 16 bits sur [-1,1]
bruit blanc gaussien
bruit blanc uniforme
saturation
dBxPx =Γ−⇒= )(log201 10maxQuantification uniforme 16 bits signés sur [-1,1]
40
60
80
100
RSB (dB)
bruit blanc uniforme
signal sinusoidal
signal carré
dBxdB PNRSB ++≈ 77.402.6
Seuil d’apparition de la saturationCarré: 0 dB
Sinus: -3.01 dB
RSB en l’absence de saturation:
134
-60 -50 -40 -30 -20 -10 0 100
20
puissance du signal (dB)
erreur de granulation
Sinus: -3.01 dB
Uniforme : -4.77 dBGaussien : -9.54 dB

Quantification Logarithmique
• Très utilisée pour la transmission de signaux audio– Permet d’obtenir un RSB à peu près constant, quelle que soit la puissance du
signalsignal
• Deux lois logarithmiques sont actuellement utilisées– la loi A est utilisée en Europe
– la loi µ aux Etas Unis et au Japon
• Peut être exprimée à l’aide d’une quantification uniforme après compression d’amplitude
y yCompression Quantification Expansion )(ˆ xQx =
135
y
)ˆ(ˆ 1 yCx −=
xCompression d’Amplitude
Quantification Uniforme
Expansion d’Amplitude
)(xCy = )(ˆ yQy u=
)(ˆ log xQx =
( )( ))()( 1log xCQCxQ u
−=

Quantification uniforme vs logarithmique
0.5
1Signal original x
x1
x2
0.5
1Signal original x
0.5
1Signal compressé y=C(x)
0 0.5 1-1
-0.5
0
0.5
1
Signal quantifié xq=Q(x)
x2
x3
0 0.5 1-1
-0.5
0
0 0.5 1-1
-0.5
0
0.5
1
Signal quantifié yq=Q(y)
0.5
1
Signal quantifié xq=C-1(y
q)
136
0 0.5 1-1
-0.5
0
0.5
quantif. uniformedomaine linéaire
quantif. logarithmiquedomaine linéaire
quantif. uniformedomaine compressé
0 0.5 1-1
-0.5
0
0.5
0 0.5 1-1
-0.5
0
0.5

Loi A
0.8
0.9
1loi de compression A
Pente élevée → bonne précision
Pente faible → augmente la dynamique
0.2
0.25
0.3
0.35
0.4
0.1
0.2
0.3
0.4
0.5
0.6
0.7
C(x)
Compression logarithmique
( ) ( )( ) ( ) 1
1;
ln1
/ln1
max
maxmax ≤≤
++
=x
x
Apourxsign
A
xxAxxC
A=87.56
Pente élevée → bonne précision
C(x)
137
0 0.01 0.02 0.030
0.05
0.1
0.15
0.2
Compression linéaire
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
x
( ) ( ) ( )Ax
xpourxsign
A
xAxC
10;
ln1 max≤≤
+=
x
Pour les signaux de très faible amplitude,équivalent à une quantification uniforme de pas ulog
ln1q
A
Aq
+=

Quantification Uniforme 8 bitsvs. Logarithmique 8 bits
• Loi A• La compression limite les effets
de la granulation50Quantif ication 16 bits sur [-1,1]
Loi A sur 8 bits Uniforme sur 8 bits
RSB pour une sinusoïde
de la granulation• RSB à peu près constant sur
une plage de 30 dB
• Quantification uniforme• Meilleur que loi A seulement 10
15
20
25
30
35
40
45
RSB (dB)
Loi AUniforme
( )ANRSBdB ln1log2077.402.6 10 +−+≈
• Meilleur que loi A seulement pour premiers 10dB
• L’effet de granulation est linéaire par rapport à la puissance du signal
138
-60 -50 -40 -30 -20 -10 0 100
5
10
puissance du signal (dB)
x1x2x3
Quantification uniformemeilleur RSB
Quantification logarithmiquemeilleur RSB
( )Γ−+≈ 10log2077.402.6 NRSBdB

Quantification Uniforme 12 bitsvs. Logarithmique 8 bits
60
70 • Pour les calculs, on reviendra toujours en quantification uniforme
RSB pour un bruit gaussien centré
-60 -50 -40 -30 -20 -10 0 100
10
20
30
40
50
puissance du signal (dB)
RSB (dB)
uniforme
– Pour éviter une augmentation du RSB,
le nombre de bits supplémentaires dépend de A uniquement
Loi A sur 8 bits
A1
logudBdB RSBRSB ≥
139
( )Γ−+≈ 10log2077.402.6 NRSBudB
( )Γ−
+++≈ 1010
log log20ln1
log2077.402.6A
ANRSBdB
++≥
A
ANNu
ln1log20
02.6
110log
bits 4log += NNu
Lorsque A=87.56 :

Le codage des entiers
140

Représentation d’entiers non signés
• Représentation binaire non-signée sur bits ∑
−
=1
2N
i
ibX bi = 0 ou 1• Représentation binaire non-signée sur N bits ∑
=
=0
2i
ibX bi = 0 ou 1
dynamique de X : 0..(2N-1)
141
• Exemple: entier en décimal, binaire et hexadécimal
010123401
16210
16101612021202121106102
1A1101026
×+×=×+×+×+×+×=×+×
==

Entiers signés : binaire décalé
Binaire DécaléBinaire DécaléBinaire DécaléBinaire DécaléEntier x codé par
Le décalage d est généralement égal àd = -2N-1
Entier x codé parla représentation binaire pure de l’entier positif
y=x+d
110011
00-210-1010111012113
Nombre Codage
234567
y
12 1 −−N
Dynamique
142
001
00-410-300-2
012
N=3
12 −− N

Entiers signés : signe et valeur absolue
Format signe et valeur absolue Format signe et valeur absolue Format signe et valeur absolue Format signe et valeur absolue Le bit de poids fort représente le signeLes autre bits, la valeur absolue de l’entierLe bit de poids fort représente le signeLes autre bits, la valeur absolue de l’entier
0011
000101002103
Nombre Codage
12 1 −−N
Deux codes
143
11000
11-301-211-101-0000
Signe
)12( 1 −− −N
Deux codes pour le zéro

Entiers signés : format complément à 1
Format complément à 1Format complément à 1Format complément à 1Format complément à 1Le bit de poids fort représente le signeNombre positif : codé comme un non-signé
ATTENTION : ne pas confondre
Format C1 et C1 d’un entier
Nombre positif : codé comme un non-signéNombre négatif : codé comme le C1 de son opposé
12 1 −−N
Deux codes
C1(x) = (2N-1) – x
avec0011
000101002103
Signé C1 Codage
Complément à 1 de x:
0
1
2
3
Non signéassocié
144Signe
Deux codes pour le zéro
Implantation efficace :Implantation efficace :Implantation efficace :Implantation efficace :inversion des bitsinversion des bitsinversion des bitsinversion des bits
avec
N fois 1
2N-1 = 111…1112
)12( 1 −− −N00110
01-311-201-111-0000
4
5
6
7
0

Entiers signés : format complément à 2
Format complément à 2Format complément à 2Format complément à 2Format complément à 2Le bit de poids fort représente le signeNombre positif : codé comme un non-signé
ATTENTION : ne pas confondre
Format C2 et C2 d’un entier
Format le plus utiliséNombre positif : codé comme un non-signéNombre négatif : codé comme le C2 de son opposé
12 1 −−N
C2(x) = 2N – x
Implantation efficace de l’opposéInversion des bits puis ajout de 1
Format le plus utiliséen arithmétique binaire
Complément à 2 de x :
Dynamique
0011
000101002103
Signé C2 Codage
0
1
2
3
Non signéassocié
145Signe
Inversion des bits puis ajout de 1
12 −− N
C2(x) = C1(x) + 1
Dynamique
00110
01----444411-301-211-1000
4
5
6
7
0

Lien entre non-signé et signé C2
• Pour une même représentation binaire
],,,,[ 0121 bbbb NN L−−
0 12-2
-10
• X entier signé C2
• Y entier non-signé
∑−
=
−− +−=
2
0
11 22
N
i
ii
NN bbX
],,,,[ 0121 bbbb NN L−− 2
3
4
5
67-7
-6
-5
-4
-3
-2 0 123
4
56
78910
11
12
131415
pour N=4 bits
• Y entier non-signé
146
∑−
=
=1
0
2
N
i
iibY
NYX 2−=
7-8-7
0≥X
12 −< NY12 −≥ NY
0<X
YX =

Propriétés de la saturation
• Modes de saturation
• Exercice:
– Montrer qu’en mode C2 pur sur 8 bits signés le calcul
C2 pur C2 avec saturation
– Montrer qu’en mode C2 pur sur 8 bits signés le calcul suivant conduit à un résultat correct, mais pas en mode de saturation• A=((100+70)+30)-150
147

Le codage des réels en virgule fixe
148

Représentation de nombres réels
• Deux exigences contradictoires:
– Précision: intervalle entre deux valeurs codées– Précision: intervalle entre deux valeurs codées• doit être le plus petit possible
– Dynamique: intervalle entre les valeurs min et max• doit être le plus étendu possible
• Les unités de calcul des DSP travaillent• Les unités de calcul des DSP travaillent– soit en format fixe (notation décimale)
– soit en format flottant (notation scientifique)
149

Format à virgule fixe : le format Qk
Définition :Définition :Définition :Définition :La représentation Qk du réel x est l'entier X défini parLa représentation Qk du réel x est l'entier X défini par
)2round( xX k=
Q0 désigne le cas du codage à l’entier le plus proche (X=round(x))
Cela correspond à une quantification uniforme de pas q=2-k
150
On peut utiliser le format Qk en signé et non-signé
Le format Qk peut également être noté Q.k

Dynamique et précision du format Qk
Précision: quantification uniforme de pas qkq −= 2
En pratique, on peut approximer les dynamiques par des intervalles
Dynamique:non-signé:
signé C2: [ ]kkNkN −−−−− −− 22 ,2 11
[ ]kkN −− − 22 ,0
q = 2
151
En pratique, on peut approximer les dynamiques par des intervalles semi-ouverts: et
D’où les formats classiques:• Dynamique sur [-1, 1[ format QN-1 sur sur sur sur N bits signésbits signésbits signésbits signés• Dynamique sur [0, 1[ format QN sur sur sur sur N bits nonbits nonbits nonbits non----signéssignéssignéssignés
[ [kN−2 ,0 [ [11 2 ,2 −−−−− kNkN

Représentation Qk sur 16 bits
kPrécision
q
Dynamique pour
16 bits signés
Dynamique pour
16 bits non signés
-1 2 [-65536, 65535] [0, 216-1]-1 2 [-65536, 65535] [0, 216-1]
0 1 [-32768, 32767] [0, 65535]
1 1/2 [-16384, 16383] [0, 32767]
14 2-14 [-2, 2[ [0, 4[
Entiers Q0
[-1 1[ Q15 sur 16 bits signés15 2-15 [-1, 1[ [0, 2[
16 2-16 [-0.5, 0.5[ [0, 1[
17 2-17 [-0.25, 0.25[ [0, 0.5[
152
[-1 1[ Q15 sur 16 bits signés
[0 1[ Q16 sur 16 bits non-signés

Quantification uniforme
Attention à l’ambigüité entre et x X
x
= x
X round
xValeur réelle exacte
exact
quantifié
qx /
Valeur réelle exacte normalisée
qXx =ˆ
Quantificationde pas q
Arrondi entier
153
x
=q
X round
Valeur réelle quantifiée Représentation entière
qXx =ˆ
Dynamique sur [qXmin, qXmax] Dynamique sur [Xmin, Xmax]

Inteprétation binaire
• Exemple : Représentation Qk non signée de x=0.1
…12 1/2 1/4 1/8 1/16 1/32 1/64 2-112-102-92-82-7 2-12
En pratique, utiliser plutôt la définition X=round(x/q)
0 0 0 0 0 1 1 0 0 1 1, 0 0 1…12 1/2 1/4 1/8 1/16 1/32 1/64 222 2
Format Q0 sur 8 bits non signés
0 00 0 0 0 0 0 ,1
0ˆ
0
=
=
x
X
Format Q sur 8 bits non signés13=X
…
Format Q12 sur 8 bit� Saturation
154
Format Q10 sur 8 bits non signés
0 1 1 0 0 1 1 02-10
…50.09960937ˆ
102
=
=
x
X
0 0 0 0 1 1 0
,
02-7Format Q7 sur 8 bits non signés
1015625.0ˆ
13
=
=
x
X

Choix du format Qk
• Pour le codage d'un ensemble de valeurs x en virgule fixe sur N bits signés, la méthode est la suivante:
1) Expliciter la dynamique prévue pour les valeurs de x
2) Estimer kmax, le k maximum permettant d'éviter la saturationéviter la saturationéviter la saturationéviter la saturation, c'est à dire vérifiant:
3) Toutes les valeurs k inférieures à k permettent d'éviter la saturation. On
maxxx ≤
1
maxmax2 −−≤ kN
x
1)(log max2max −+−= Nxk
155
3) Toutes les valeurs k inférieures à kmax permettent d'éviter la saturation. On choisit la valeur permettant la plus grande précision, c'est à dire kmax.
4) Le pas de quantification est alors:
Dans le cas non signé, on a:
max2 kq
−=
max2max
kNx
−≤ Nxk +−= )(log max2max

Quantification et précision décimale
A titre purement indicatifA titre purement indicatifA titre purement indicatifA titre purement indicatif, il est possible de déterminer le nombre de chiffres décimaux significatifs associé à un pas de quantification.
Dkq −− ≈= 102( )
Dk
Dk
3.3
10log2
≈
≈
Notons- k le nombre de bits après la virgule (format Qk),- D le nombre de chiffres décimaux significatifs après la virgule,- q le pas de quantification
-On a l'équivalence suivante:
156
En particulier, le format Q15 a une précision approximative de 4 chiffres décimaux après la virgule
Ceci est un calcul approximatif,ne pas utiliser pour justifier le choix d’un format Qk

Opérations arithmétiques virgule fixe
157

Influence des opérations sur le format Qk
• Addition:Si A, B représentations Qk de a et b,alors A+B est la représentation Qk de a+b.
A + BQk Qk
Qk
A + BQk Ql
k≠lA+B Qk a+b.
• MultiplicationSi A représentations Qk de aet B représentations Ql de b,alors A*B est la représentation Qk+l de a×b.
• DécalageSi A représentations Qk de aalors A<<2=2n A est la représentation Qk+n de a.
Qk
A * BQk Ql
Qk+l
A >> n
Qk
A << n
Qk
k≠l
alors A<<2=2n A est la représentation Qk+n de a.et A>>2=2-n A est la représentation Qk-n de a.
• TranstypageChanger le nombre de bits sur lequel est codé un nombre ne change pas le format Qk.
158
Qk-n Qk+n
(int)L
Qk
Qk
(long)I
Qk
Qk

Multiplication entière sur le C54x
Multiplication entiers 16 bits
; AR2 = @X
; AR3 = @Y
Int16 X,Y,R;
Int32 A;; AR3 = @Y
; AR4 = @R
MPY *AR2,*AR3,A
STL A,*AR4
Int32 A;
A = (Int32)X * Y;
R = (Int16)A;
s s015162931 30
X*Y sur 32 bits
159
s s
s
Réduction à 16 bitsPartie basse de l’accumulateur :STL = Store Low
R: Résultat sur 16 bits
X*Y

Multiplication virgule fixe Q15
RSBX FRCT ; FRCT←0
MPY *AR2,*AR3,A
Multiplication format Q15 sur 16 bits
A = (Int32)X * Y;
Sans
FRCT
SSBX FRCT ; FRCT←1
MPY *AR2,*AR3,A
STH A,*AR4
MPY *AR2,*AR3,A
STH A,-1,*AR4
A = (Int32)X * Y;
R = (Int16)(A>>(16-1));
015 142931 30
A = ((Int32)X * Y)<<1;
R = (Int16)(A>>16);
Avec
FRCT
Sans
FRCT
160
s s015 14
Partie haute de l’acc.(STH=Store High)Réduction à 16 bits
sDécalage à gaucheautomatique si FRCT=10
s
X*Y sur 32 bitsQ30
Q31
Q15
>>16 (STH)
<<1
R: Résultat sur 16 bits

Accumulateurs sur le C54x
15-0
ALAHAGAccumulateur A
31-16
Bits de Garde
39-32
Bits de poids fort
Bits de poids faibleGarde poids fort faible
� Sur le C54X, deux accumulateurs 40 bits : A et B� Peuvent servir de source et de destination pour l’ALU et pour le MAC� Sont mappés en mémoire (MMR)
; A accumulateur 40 bits
; AR2=@X[0], AR3=@Y[0]
; AR4=@R
; 55 répétitions
Int32 A;
Int16 X[],Y[];
Int16 R;
A=0;
161
RPTZ A, #54
MAC *AR2+, *AR3+, A
STH A,-1,*AR4
A=0;
for (i=0; i<=54; ++i)
A = A + (Int32)X[i]*Y[i];
R = (Int16)(A >> 15);
Accumulateur de 40 bitsnon accessible depuis le langage C:Dégradation dès qu’un résultatintermédiaire dépasse 32 bits.
Si le résultat final R tient sur 16 bits, possibilité de résultats intermédiaires jusqu’à 40 bits sans saturation.

Arithmétique et précision
• Divisions et décalages entraînent une erreur liée à la perte de précision
Int16 X[4]={15, 23, 7, 2};x(0)=15 x(1)=23 x(2)=7 x(3)=2
a = (x(0) + x(1) + x(2) + x(3))/4 A = ((Int32)X[0]+X[1]+X[2]+X[3])>>2;
Equivalence sur les réels
Pas d’équivalence en virgule fixe
A = floor(47/4) = 11 erreur 0≤e<1
Int16 X[4]={15, 23, 7, 2};Int16 A;
e
e e
x(0)=15 x(1)=23 x(2)=7 x(3)=2
a = 47/4 = 11.75
162
A = (X[0]>>2) + (X[1]>>2)+ (X[2]>>2) + (X[3]>>2);
a = x(0)/4 + x(1)/4 + x(2)/4 + x(3)/4
sur les réels
A = 3 + 5 + 1 + 0 = 9 erreur 0≤e<4a = 15/4 + 23/4 + 7/4 + 2/4 = 11.75
e0 e1e2 e3

Accumulation et saturation
• Exercice:1) Quelle est la dynamique de l’addition de M entiers non-signés n bits ?
2) En déduire le nombre de bits minimum N de l’accumulateur pour éviter la saturation.
1’ et 2’) Même questions en signé.
• Problème:On désire calculer le produit scalaire aM entre deux vecteurs x et h de taille m, dont toutes les valeurs sont l’intervalle ]-1, 1[. Les valeurs sont codées au format Q15 sur 16 bits signés (Int16). On note am les accumulations intermédiaires :
1) Quelle est la dynamique des résultats intermédiaires am ?
∑−
=
=1
0
)()(
m
i
m ihixa
1) Quelle est la dynamique des résultats intermédiaires am ?
2) En déduire le nombre de bits nécessaires pour pouvoir calculer aM exactement.
3) Supposons que l’on soit contraint d’utiliser uniquement les types Int16 et Int32. A quel format Qk faut-il stocker les résultats intermédiaires pour éviter la saturation ?
4) On suppose de plus que aM∈]-1, 1[, mais sans aucune garantie sur les am intermédiaires.Ecrire le code C permettant de calculer aM en Q15 sur 16 bits signés avec la meilleure précision possible sans saturation. (opérations: +, *, >>, (Int16), (Int32))
163

Le codage des réels en virgule flottante
164

Représentation en virgule flottante
ES Mx 2)1( ××−=
• Le signesignesignesigne S : 1 bit (0 ou 1)
• La mantissemantissemantissemantisse M : réel positif codé sur m bits
• L’exposantexposantexposantexposant E : entier signé sur e bits
Nem =++1
•Opération de normalisationnormalisationnormalisationnormalisation:
nombre de chiffres significatifsdynamique
165
•Opération de normalisationnormalisationnormalisationnormalisation:Pour rendre la représentation unique,M doit satisfaire en outre:
et peut donc être codé uniquement par sa partie fractionnaire F, son bit de poids fort étant implicitement à 1:
21 <≤ M
44 344 21K
F
mm bbbbM 0121,1 −−=

Format virgule flottante IEEE 754
Simple précision (N=32 bits) : float
Double précision (N=64 bits) : double
ES Mx 2)1( ××−=
Signe S (1 bit)
Exposant E (8 bits)en binaire décalé (codé par le non-signé E+127)
Fraction F (23 bits), partie fractionnaire de la mantisse�Mantisse M sur 24 bits non-signés
Double précision (N=64 bits) : double
float double
Signe S (1 bit)
Exposant E (11 bits)codé par E+1023
Fraction F (52 bits)� M sur 53 bits
166
�Mantisse M sur 24 bits non-signés
•Cas spéciauxZéro: tous les bits à 0Underflow: exposant = 0000…2
Overflow: exposant = 1111…2
� M sur 53 bits

Dynamique en format flottant
• Pour le codage en virgule flottantela dynamique est conditionnée par le nombre de bits de l’exposant:
( ) ( ){ }11loglog11log2 max22max2 ++≥⇒++≥ xexe
12 )12(max −= −ex
D’où la condition :
( ) ( ){ }11loglog11log2 max22max2 ++≥⇒++≥ xex
167
En pratique, la dynamique est beaucoup moins contraignante en virgule flottante qu’en virgule fixe, et requiert donc moins d’attention.

Virgule flottante par bloc
• Simulation de la représentation virgule flottante avec un DSP à virgule fixe
; L’accumulateur A contient
; une valeur sur 40 bits
EMx 2×=
virgule fixe– La mantisse M est un réel signé
de [-1, 1]codé au format Qm-1 sur m bits
– Un autre contient l’exposant E
• L’exposant est constant pour un bloc de données
• Les calculs se font sur les mantisses, puis les résultats sont
; Calcule l’exposant de A
; et le stocke dans T
EXP A
; Normalise A
; en fonction de T
NORM A
; Stocke:mantisses, puis les résultats sont mis à l’échelle en fonction de l ’exposant– Dans ce cas, la normalisation est
plutôt
168
; - la mantisse dans *AR3
STL A,*AR3; - l’exposant dans *AR4
ST T,*AR4
Passage de la virgule fixe à la virgule flottante simulée sur deux entiers
(ASM C54x)
15.0 <≤ M

Mise en œuvreMise en œuvre
de filtres numériques
•Méthodologie d’implémentation•Méthodologie d’implémentation
• Lookup table (LUT)
• Structures de filtres RIF et RII
• Problèmes liés à la quantification et à la saturation
169

Méthodologie d'implantation d'un filtre
numérique
170

Méthodologie d'implantation d'un filtre
• Étape 0 : Conception du filtre– Choix du filtre et calcul des coefficients
• Étape 1 : Choix de structure– Choix d'un schéma d'implantation– Écriture des équations correspondantes
• Étape 2 : Choix algorithmiques– Choix de l'implantation mémoire et des variables– Écriture de l'algorithme en virgule flottante
• Étape 3 : Choix numériques– Choix du format Qkk
– Écriture du programme en virgule fixe
• Étape 4 : Validation– Définir un protocole de test et l'appliquer
• Etape 5 : Optimisation
171

Etape 0 : Conception du filtre
Outils de conception de filtres numériquesPar exemple, sous Matlab: Signal Processing Toolbox, outil fdatool
172

Etape 0 : Conception du filtre (2)
• Conception de filtres RIF
cfirpm Complex and nonlinear-phase equiripple FIR filter designfir1 Window-based finite impulse response filter designfir2 Frequency sampling-based finite impulse response filter designfircls Constrained least square FIR multiband filter designfircls Constrained least square FIR multiband filter designfircls1 Constrained least square, lowpass and highpass, linear phase, FIR filter desigfirls Least square linear-phase FIR filter designfirpm Parks-McClellan optimal FIR filter designfirpmord Parks-McClellan optimal FIR filter order estimationfirrcos Raised cosine FIR filter designgaussfir Gaussian FIR pulse-shaping filter designintfilt Interpolation FIR filter designkaiserord Kaiser window FIR filter design estimation parameterssgolay Savitzky-Golay filter design
• Conception de filtres RII
buttord Butterworth filter order and cutoff frequency
Analyse des caractéristiques des filtres
filternorm 2-norm or infinity-norm of a digital filterbuttord Butterworth filter order and cutoff frequencybutter Butterworth analog and digital filter designcheb1ord Chebyshev Type I filter ordercheby1 Chebyshev Type I filter design (passband ripple)cheb2ord Chebyshev Type II filter ordercheby2 Chebyshev Type II filter design (stopband ripple)ellipord Minimum order for elliptic filtersellip Elliptic (Cauer) filter designmaxflat Generalized digital Butterworth filter designyulewalk Recursive digital filter design
173
filternorm 2-norm or infinity-norm of a digital filterfreqz Frequency response of digital filtersfvtool Filter Visualization Toolgrpdelay Average filter delay (group delay)impz Impulse response of digital filtersphasedelay Phase delay response of digital filtersphasez Phase response of digital filtersstepz Step response of digital filterszerophase Zero-phase reponse of digital filterszplane Zero-pole plot

Étape 1 : Schéma et équations
Exemple sur une cellule RII du 2e ordre
b1
b0
-a1
ynxn
wns
2211 −−
++=
−−= nnnn
wbwbwby
wawasxwwn-1
z-1
174
b2-a2
22110 −− ++= nnnn wbwbwby
wn-2
z-1
Forme directe II
Équations correspondantes

Étape 2 : Variables et algorithme
s
coefs
wn-1 w(n-1)
dbufferEntrées :x (contient xn)dbuffer (contient wn-1 et wn-2)coefs (contient les coefficients)
0 0
a1
a2
b2
b1
b0
wn-2 w(n-2)
tableau descoefficients
tableau desretards
Variable temporaire :w (recevra wn)
Calcul
wn ← s * xn – a1 * w(n-1) – a2 * w(n-2)
y ← b0 * wn + b1 * w(n-1) + b2 * w(n-2)
Mise à jour retards
xn
? puis yn
x
y
coefs (contient les coefficients)1
2
3
4
5
1
175
coefficientsw(n-2) ← w(n-1)
w(n-1) ← wn
? puis yn y
? puis wn w
variablestemporaires
État de la mémoirelors de l'appel de la fonction
Sorties :y (reçoit yn)dbuffer (contient wn'-1 et wn'-2 pour n'=n+1)

Étape 3 : Format Qk et programme C
x(n) Q15
s Q15 int cellule(int x) {int w;
int coefs[6];int dbuffer[2];
ai Q15
bi Q15
wk Q15/* Calcul */w=((long)coefs[0]*x
-(long)coefs[1]*dbuffer[0]–(long)coefs[2]*dbuffer[1]) >> 15;
y=((long)coefs[5]*w+(long)coefs[4]*dbuffer[1]+(long)coefs[3]*dbuffer[0]) >> 15;
/* Mise à jour retards */
int cellule(int x) {int w;int y;
Conversion algorithme (calcul sur des réels)vers programme (calcul en format Qk)
176
/* Mise à jour retards */dbuffer[1]=dbuffer[0];dbuffer[0]=w;
/* Sortie */return y;
}
s * x
devient
(coefs[0]*x)>>15
pour un résultat en Q15

Aller-retour étapes 1-2-3:correction d’erreurs, évolution des objectifs
coefsw (n-1)
dbuffer
0
Exemple: extension de l’algorithme à des cellules en cascade.L’implantation mémoire nécessite une phase de conception
s
a11
a12
b12
b11
b10
w1(n-1)
w1(n-2)
w2(n-1)
w2(n-2)cellule 1cellule 2
cellule 10
1
2
…
…
5
0
1
2+1
2+2
177
a21
a22
b22
b21
b20
cellule 2
5+1
5+2
…
H1(z) H2(z)sx(n) …
Nouvelle structure du filtre

Utilisation de lookup-table (LUT)
178

Principe de la LUT
• Précalcul d’une fonction calculatoirement y = g(x)
g(x0)
lut
0
k
g(x1)
g(x )
1calculatoirementcomplexe– Fonctions
trigonométriques
– Fonction non-linéaire(log, exp…)
– Forme d’onde ou fenêtre(triangle, hamming…)
y = g(x)
y = lut[m]
g(x2)
g(x3)
2
3
g(xM-2)M-2
g(xM-1)M-1
……
(triangle, hamming…)
• Approximation– Quantification des valeurs
d’entrée x
179
avec xm = x0+m.q
lut[m] ≝ g(xm)

Exemple : LUT pour la fonction cosinus
Une période : cos(2π t) pour t∈[0,1[
lut[m] ≝ cos(2π m/M) pour m∈[0..M-1]-0.5
0
0.5
1
cos(2π n f / f )
lut[m] ≝ cos(2π m/M) pour m∈[0..M-1]
t = m/M
Application au calcul d’une sinusoïde de fréquence f à fréquence d’échantillonnage fe
0 0.2 0.4 0.6 0.8 1-1
0 5 10 15
-3
-2
-1
0
1
2
3x 10
4
180
cos(2π n f / fe)
m = n f M / fe
t = n f / fe
fe / M = flut peut être précalculé si entier
cos(2π n f / fe) � lut[n * f / flut]
Calculs entiers uniquement

Filtres RIF
• Structure transverse• Buffer linéaire
181
• Buffer linéaire• Buffer circulaire

Structures pour filtre RIF
• Structure transverse avec ligne à retard
xxn-N+1xn-1 xn-2
• Structure en treillis (filtres adaptatifs)
xn
yn
xn-N+1xn-1 xn-2
b0 b1 b2 b3 bN-1
182

Filtre RIF par structure transverse
• Deux aspects
– Mise à jour de la mémoire– Mise à jour de la mémoire
• A chaque réception d’une nouvelle donnée x(n)
– Calcul du filtre
ACCU← 0
Insérer x(n) dans un buffer
183
ACCU← 0Pour i de 0 à N-1
ACCU ← ACCU + h(i) × x(n-i)
Retourner ACCU

x(n-1)
Buffer linéaire
0x(n-1) x(n)
x(n)xtab xtab
0
Schéma "état mémoire"
Application au filtre RIFx(n-1)
( ) ( ) ( )∑−
=
−=1
0
N
i
inxibny2
0
1
N-2
x(n-1)
x(n-2)
…
…
…
…
x(n-N+1)
x(n)
x(n-1)
x(n-2)
…
…
…
x(n-N+2)
0
1
N-2
1
pour i de 0 à N-1:A ← A + btab[i] × xtab[i]
Application au filtre RIF
184
N-2
N-1
x(n-N+1)
x(n-N)
x(n-N+2)
x(n-N+1)
x(n-N)
Mise à jour du buffer
N-2
N-1
Avant insertionde x(n)
Après insertionde x(n)
Calcul

Buffer circulaire (adressage modulo)
x(n)xtab xtab
Schéma "état mémoire"
Application au filtre RIF
x(n-N)
x(n-k+1)
…
x(n-N+1)
x(n-N)
x(n-1)
x(n-2)
x(n-k+1)
…
x(n-N+1)
x(n)
x(n-1)
x(n-2)
idx
0
1
0
1
idxpour i de 0 à N-1:
idd ← (idx + i)%NA ← A + btab[i] × xtab[idd]
Utilisation d’une variable
( ) ( ) ( )∑−
=
−=1
0
N
i
inxibny
Application au filtre RIF
Calcul
idx
185
…
x(n-k)
Mise à jour du buffer
…
x(n-k)
N-2
N-1
N-2
N-1
Utilisation d’une variable auxiliaire idd pour l’index de x(n-i) dans le tableau
Plus lisible lors de la conception de l’algorithme permet de représenter idd sur un schéma
Avant insertionde x(n)
Après insertionde x(n)

Filtre RIF avec buffer circulaire en assembleur
( ) ( ) ( )∑−
=
−=1
0
N
i
inxihnyN .set 32
; adr_x+d supposé chargé dans AR2 Adresses Contenu=0idans AR2
STM #(coef)+N-1, AR3
STM #(adr_y), AR5
STM #N, BK
STM #1, AR0
RPTZ A, #N-1
i = coef h(N-1)
Adresses Contenu
i + 1 h(N-2)
i + 2 h(N-3)
…… ……
i + N - 1 h(0)
k = adr_x x(n-N+d-1)
Adresses Contenu
…… ……
k + d - 1 x(n-N+1)
…… ……
k + d x(n)
k + N x(n-N+d)
186
RPTZ A, #N-1
MAC *AR2+0%, *AR3-, A
STH A, *AR5
i + N - 1 h(0)
Mémoire Programme
k + N x(n-N+d)
Mémoire Données
Rmq: les log2(N) bits de poids faible de adr_x
doivent être nuls pour que l’adressable modulo *AR2%0 fonctionne

Filtre RIF en virgule fixe
Entrées y(n) et sorties x(n) généralement normalisées de façon identiquePar exemple sur [-1 1] : format Qm-1 sur m bits signés
Coefficients au format Qk, dépend du filtre
( ) ( ) ( )∑−
=
−=1
0
N
i
inxihny
Coefficients au format Qk, dépend du filtre
Y = (H * X) >> k
187
Y = (H * X) >> k
Qm-1+k
Qk Qm-1
Qm-1
Qm-1

Saturation pour un filtre RIF
( ) ( ) ( )∑−
=
−=1
0
N
i
inxihny
m bitsm’’ bits m’ bits
maxmax)( xNhny ≤
Signé
)(log max2 xm =
)(log' hm =
m bitsm’’ bits m’ bits
Non-signé
1)(log max2 += xm
1)(log' += hm
(Pire cas sur x et h)
188
)(log' max2 hm =''
max 2my =
)(log''' 2 Nmmm ++=
1)(log' max2 += hm
1''max 2 −= my
)(log1''' 2 Nmmm +−+=

Bornes sur la saturation
• Lorsque le filtre h est connu, on peut être plus précis
( ) ( )∑−
<1N
xihny( ) ( ) ( )∑−
−=1N
inxihny ⇒
• Ce qui correspond à
( ) ( )∑=
<0
max
i
xihny
+= ∑ )][(log'' 2
i
iHmm
en notant H[i] l’entier correspondant au codage Qk sur m’ bits de h(i)
( ) ( ) ( )∑=
−=0i
inxihny ⇒
189
−
≥−=
sinon
0)( si 1-)(
max
max
x
nhxnx
Cette borne est atteinte pour un signal spécifique x :
en notant H[i] l’entier correspondant au codage Qk sur m’ bits de h(i)

Compromis précision/saturation (1)
T = 0pour i=0..N-1
Calcul brut Exemple:
H et X au format Q7 signé sur 8 bitspour i=0..N-1T = T+(H[i]*X[i])
Y = T >> k
T format Qk+m-1 sur m’’ bits
Y format Qm-1 sur m bits
H X
T au format Q14 sur 16 bits
T = T + H*B
Qk Qm-1
16+G bits
190
Y au format Q7 sur 8 bits
Y = T >> 7
Qm-1
Nécessité de bits de garde si filtre de taille importante.
G bits
Perte de précisionSaturation

Compromis précision/saturation (2)
T = 0pour i=0..N-1
Décalage dès les calculs intermédiaires Exemple:
H et X au format Q7 signé sur 8 bitspour i=0..N-1T = T+((H[i]*X[i]) >> p)
Y = T >> (k-p)H X
T au format Q10 sur 16 bits
T = T + (H*B)>>3
Qk Qm-1
Perte de précision sur les résultats intermédiaires, mais pas de risque de saturation à ce niveau
p=3
191
Y au format Q7 sur 8 bits
Y = T >> (7-3)
Qm-1
de saturation à ce niveau
Pas de saturation si filtre bien choisi en fonction du type de signal

Filtres RII
• Structures de filtres
192
• Décomposition en éléments simples
• Problèmes de quantification

Filtre RII
• Fonction de transfert rationnelle
−1Q −− 11 QQ
∑
∑−
=
−
−
=
−
+
==1
1
1
0
1)(
)()(
P
k
kk
Q
i
ii
za
zb
zA
zBzH
( )∏∑−
=
−−
=
− −=1
0
10
1
0
1
Q
i
i
Q
i
ii zzbzb
( )∏∑−
=
−−
=
− −=+1
0
11
1
11
P
i
i
P
i
ii zpza
Zéros zi
Pôles pi
193
• Equation aux différences
∑∑−
=−
−
=− −=
1
1
1
0
P
k
knk
Q
i
inin yaxby
Pôles pi

Forme directe I (ND)
z-1 z-1
b0xn yn )(
1)()(
zAzBzH =
∑∑−
=−
−
=− −
=
1
1
1
0
Q
k
knk
Q
i
inin yaxby
z-1
z-1
z-1
z-1
z-1
z-1
b1
b2
b3
•Forme non canonique
-a1
-a2
-a3
194
z-1 z-1
•Forme non canonique
•Nécessite Q+P mémoires Q pour les x(n-i)P pour les y(n-k)
Forme directe I (ND)
-aQ-1
B(z) 1/A(z)
bQ-1

Forme directe II (DN)
z-1
b0
yn
)()(
1)( zB
zAzH =
xn
wn
z-1
z-1
z-1
b1
b2
b3
-a1
-a2
-a3 ∑−
=−=
1
0
Q
i
inin wby
∑−
=−−=
1
1
Q
k
knknn waxw
195
z-1
bQ-1-aQ-1
•Forme canonique
•Nécessite max(Q,P) mémoires
•Risque accru de dépassement au niveau de w(n) car filtre récursif 1/A(z) appliqué en premierForme directe II (DN)
1/A(z) B(z)

Transposition de la structure du filtre
xn
z-1
wnb0 yn
b0xn yn
-a1
-a2
z-1
z-1
b1
b2b2
b1
z-1
z-1
Forme directe II Forme directe II transposée
-a1
-a2
196
22110 −− ++= nnnn wbwbwby
2211 −− −−= nnnn wawaxw
2211
22110
−−
−−
−−
++=
nn
nnnn
yaya
xbxbxby

Bilan structures RII
Formes II et II transposéeCanoniques en nombre de retards
Formes I et II transposée:Partie non récursive appliquée en premier
z-1 z-1
b1
b0xn yn
-a1
xn
b0
z-1
yn
z-1
b
b0
-a
ynxn
wn
Partie non récursive appliquée en premier� Limite les saturations dues aux résonnances dans la partie récursive
Forme II transposée:Potentielle perte de précision à chaque retard
z-1 z-1
b2 -a2
Forme directe I
197
b2
-a1
-a2
b1
z-1
z-1z-1
z-1
b1
b2
-a1
-a2
Forme directe II Forme directe II transposée

Décomposition d’un filtre RII
• en sections du deuxième ordre– choisies pour leur stabilité et robustesse
– coefficients réels (racines conjuguées)
Structure parallèle
2
2
1
1
1
10
1 −−−−−−−−
−−−−
++++++++++++
zaza
zbb
x y
Structure cascade
c0
21
2
2
1
10
1 −−−−−−−−
−−−−−−−−
++++++++++++++++
zaza
zbzbb21
2
2
1
10
1 −−−−−−−−
−−−−−−−−
++++++++++++++++
zaza
zbzbbxn yn
198
2
2
1
1
1
10
1 −−−−−−−−
−−−−
++++++++++++
zaza
zbbxn yn
Expansion partielle
∑∑∑∑−−−−
====−−−−−−−−
−−−−
++++++++++++
++++====1
02
2
1
1
1
100
1)(
)( N
i ii
ii
zaza
zbbc
zA
zB
211 ++++++++ zaza 211 ++++++++ zaza
Factorisation
∏∏∏∏−−−−
====−−−−−−−−
−−−−−−−−
++++++++++++++++
====1
02
2
1
1
2
2
1
10
1
1
)(
)( N
i ii
ii
zaza
zbzbb
zA
zB

Décomposition en cascade
s0 s1 s2 s3x(n) y(n)H1(z) H2(z) H3(z)
s0 s1 s2 s3x(n) y(n)
)()()(1
1
)(
)(3210
1
02
2
1
1
2
2
1
10 zHzHzHb
zaza
zbzbb
zA
zB N
i ii
ii =++++
= ∏−
=−−
−−
199
2
2
1
1
2
2
1
1
1
1)(
−−
−−
++++
=zaza
zbzbzH
ii
iii
avec :avec : etet03210 bssss =

Exemple
– Pour les spécifications suivantes (fs=16kHz):
– L’approximation de Chebyshev nécessite un filtre – L’approximation de Chebyshev nécessite un filtre d’ordre 6 :
200
[N,Wn]=CHEB2ORD(1800/8000,4000/8000,0.01,50);
[B,A]=CHEBY2(N,50,Wn)

Exemple
• B = [ 0.0276 0.0685 0.1194 0.1392 0.1194 0.0685 0.0276 ]
Coefficients:
• A = [ 1.0000 -1.5044 1.7003 -0.9512 0.3933 -0.0764 0.0085 ]
Fonction de transfert: freqz(B,A)
201

Exemple : décomposition en cascade
Fonction de transfert: freqz(B,A) Pôles et zéros: zplane(A,B)
12
3
symétrie
• Appariement :
• Les pôles conjugués les plus proches du cercle unité sont appariés aux zéros les plus proches. On recommence avec les deuxièmes plus proches et ainsi de suite.
• Ce choix maximise la stabilité de chaque section202

Exemple : décomposition en cascade
[SOS,G]=tf2sos(B,A);1.0000 1.7489 1.0000 1.0000 -0.2831 0.0461
1.0000 0.6667 1.0000 1.0000 -0.4695 0.2687SOS = B2
B1
A2
A1
G = 0.0276
-40
-20
0
20
H1
H2
H3
H
1.0000 0.6667 1.0000 1.0000 -0.4695 0.2687
1.0000 0.0693 1.0000 1.0000 -0.7518 0.6868B3 A3
SOS = B2 A2G = 0.0276
21
21
10461.02831.01
7489.11)( −−
−−
+−++
=zz
zzzH
216667.01 −− ++ zz
Fonctions de transfert: freqz(B1,A1)…
203
0 1000 2000 3000 4000 5000 6000 7000 8000-120
-100
-80
-60
-40
21
21
22687.04695.01
6667.01)( −−
−−
+−++
=zz
zzzH
21
21
36868.07518.01
0693.01)( −−
−−
+−++
=zz
zzzH
0276.00 =b

Filtrage en virgule fixe
• Quantification des coefficients
• Quantification des signaux
204

Erreur de quantification des coefficients
z-1
b
b0
-a
ynxn
aaa ∆+=z
z-1
z-1
b1
b2
b3
-a1
-a2
-a3
kkk aaa ∆+=
kkk bbb ∆+=
205
z-1
bQ-1-aQ-1
Forme directe II
Quantification d’un coef :
aq = round(a*q)/q
avec un pas de quantification q=2-k

Quantification des coefficients
kkk aaa ∆∆∆∆++++====∑
∑
−
=
−
+
==P
k
Q
i
ii zb
zA
zBzH 0
)(
)()(
Le dénominateur quantifié devient :
Plus le degré du polynôme est élevé, plus les pôles et
kkk
( ) ( )∏∑−
=
−−
=
− −=+=1
1
1
1
1
11
Q
l
l
Q
k
kk zpzazA
∑=
−+k
kk za
zA
1
1)(
206
Plus le degré du polynôme est élevé, plus les pôles et les zéros seront perturbés modifiant ainsi la fonction de transfert
Il est plus robuste de décomposer le filtre en sections d’ordre plus faible

Effets de la quantification (1)
207
Fonction de transfert avec coefficients quantifiés(Structure directe)

Effets de la quantification (2)
208
Fonction de transfert avec coefficients quantifiés(Structure cascade de sections du 2nd ordre)

Quantification et saturation sur les données
Apparaît quand on tronque les données de l’accumulateur pour les stocker en mémoire (bruit de quantification en)
Forme Directe IIUne source de bruit
-a1
xn
b1
b2
z-1
yn
en
z-1
b1
b0
-a1
ynxn
en
Forme Directe II TransposéeDeux sources de bruit
209
b2 -a2
z-1
z-1
b2-a2
Une seule source de bruit qui est de plus filtréeMais application des pôles du filtre en premier=> risques de saturation sur wn
Application des zéros du filtre en premier=> filtrage des fréquences susceptibles d’avoir un large gain au niveau des pôles

Cycles limites sur filtres récursifs
z-1
g
x(n) y(n) y(n) = x(n) + g . y(n-1)
zg
Y = X + ((G * Y + 1) >> 2);
Exemple pour G en Q2 et X et Y entiers
Division par 4avec arrondi au plus proche voisin
Pour g=0.75, G=3, Y(0)=3 et X(n) nul
Avec arrondiY(0)=3Y(1)=2
Sans quantification :y(0)=3y(1)=2.25
210
Y(1)=2Y(2)=1Y(3)=1Y(4)=1Y(5)=1Y(6)=1Y(7)=1Reste bloqué à 1
y(1)=2.25y(2)=1.6875y(3)=1.2656…y(4)=0.9492…y(5)=0.7119…y(6)=0.5339…y(7)=0.4004…Tend vers 0
((3 * 1 + 1) >> 2) == 1

Gestion de la saturation (1)
• Signal à bande étroite
(proche d’une sinusoïde pure de fréquence f0)(proche d’une sinusoïde pure de fréquence f0)
• On a alors la borne
max)()( xfHny∞
≤
)()()( 0 fXfHfY ≈
avec
211
max∞
)(maxarg)( fHfHf
=∞

Gestion de la saturation (2)
• Signal à bande large
– On raisonne en puissance moyenne– On raisonne en puissance moyenne
– La probabilité de non saturation dépend du type de signal et du facteur de charge
222)()()( fXfHfY ≤
y
212
∫=
==ef
fe
x dffXf
fX
0
222
2)(
1)( σ
yy
y
σmax=Γ

Saturation sur les résultats intermédiaires
z-1
b0
ynxn
wnAfin d’éviter la saturation lors du stockage de wn, ajout de facteurs d’échelles:
s en entréez-1
z-1
b1
b2
-a1
-a2
s en entrée1/s en sortie
Signal à bande étroite, utilisation de la norme L∞∞∞∞ :
Signal à bande large, utilisation de la norme L :
∞
=)(/1
1
fAs
b0 / s
yxwn
s
213
Signal à bande large, utilisation de la norme L2 :
2)(/1
1'
fAs =z-1
z-1
b1 / s
b2 / s
-a1
-a2
ynxn

Vue d’ensemble
: bruit de quantification et risque de saturation
214
210
03 αααααααααααα
ααααb
====(((( ))))∞∞∞∞
====fA0
0/1
1αααα
(((( )))) (((( )))) (((( ))))(((( ))))∞∞∞∞
====fAfAfB 1000
1/
1
αααααααα (((( )))) (((( )))) (((( )))) (((( )))) (((( ))))(((( ))))
∞∞∞∞
====fAfAfAfBfB 2101010
2/
1
αααααααααααα

Bruit en sortie
– La puissance du bruit en sortie est :
∫∫∫∫====eF
e
eo dffHfHfHF 0
2
2
2
1
2
0
2
3
2
2
2
1
22 )()()(1
αααααααααααασσσσσσσσ
∫∫∫∫++++eF
e
e dffHfHF 0
2
2
2
1
2
3
2
2
2 )()(1
αααααααασσσσ
∫∫∫∫++++eF
e
e dffHF 0
2
2
2
3
2 )(1
αααασσσσ
Bruit du premier étage
Bruit du deuxième étage
Bruit du troisième étage
215
Le facteur d’échelle atténue le signal, mais pas le bruit de quantification, il faut donc le choisir le plus élevé possible, sous la contrainte de la saturation.

Calcul du facteur d’échelle
[SOS,G]=tf2sos(B,A);
B = [ 0.0276 0.0685 0.1194 0.1392 0.1194 0.0685 0.0276 ]A = [ 1.0000 -1.5044 1.7003 -0.9512 0.3933 -0.0764 0.0085 ]
1.0000 1.7489 1.0000 1.0000 -0.2831 0.0461
1.0000 0.6667 1.0000 1.0000 -0.4695 0.2687
1.0000 0.0693 1.0000 1.0000 -0.7518 0.6868B3 A3
SOS = B2
B1
A2
A1
G = 0.0276
DécompositionG=s0s1s2s3 non fournie choix du concepteur
[SOS,G]=tf2sos(B,A);
216
H1(z) H2(z) H3(z)
s0 s1 s2 s3x(n) y(n)

Facteurs d’échelle intégrés aux filtres
[SOS,G]=tf2sos(B,A,’up’,’two’);
B = [ 0.0276 0.0685 0.1194 0.1392 0.1194 0.0685 0.0276 ]A = [ 1.0000 -1.5044 1.7003 -0.9512 0.3933 -0.0764 0.0085 ]
[SOS,G]=tf2sos(B,A,’up’,’two’);
0.2776 0.4854 0.2776 1.0000 -0.2831 0.0461
0.2681 0.1787 0.2681 1.0000 -0.4695 0.2687
0.3851 0.0267 0.3851 1.0000 -0.7518 0.6868B3 A3
SOS = B2
B1
A2
A1
G = 0.9617
Les facteurs d’échelle s1, s2, s3 sont déjà intégrés aux coefficients BLe G calculé correspond à s0
0.0276 = 0.9617 × 0.2776 × 0.2681 × 0.3851
217
H1(z) H2(z) H3(z)
Gx(n) y(n)
0.0276 = 0.9617 × 0.2776 × 0.2681 × 0.3851

Codage Qk des coefficients d’une cellule RII
• Pour des sections du second ordre,– A(z) et B(z) peuvent s’écrire: (((( )))) 221cos21 −−−−−−−− ++++−−−− zrzr θθθθ
– Dénominateur: pour la stabilité |r|<1, donc les coefficients sont dans [-2,2].
– Numérateur: en utilisant les prototypes classiques (Butterworth, Chebychev, Elliptique) les zéros sont sur le cercle unité:|r|=1 les coefficients sont dans [-2,2].
�Codage Q14 sur 16 bits OKSur l’exemple précédent, Q15 convient aussi(tous les coefficients sont entre -1 et 1)
218

Codage Qk des coefficients
0.2776 0.4854 0.2776 1.0000 -0.2831 0.0461
0.2681 0.1787 0.2681 1.0000 -0.4695 0.2687SOS =
BG = 0.9617
A
0.2681 0.1787 0.2681 1.0000 -0.4695 0.2687
0.3851 0.0267 0.3851 1.0000 -0.7518 0.6868
SOS =
SOSq = round( SOS / 2^15 );Gq = round( G / 2^15 );% plus test de saturation
9095 15906 9095 32767 -9277 1511
8786 5857 8786 32767 -15385 8803SOSq =
Gq = 31512
219
8786 5857 8786 32767 -15385 8803
12619 875 12619 32767 -24634 22505
SOSq =
Attention à la saturation:le plus grand entier signé en Q15 est 32767
et non pas 32768

Conclusion
• Filtres RIF– Structure transverse: buffers linéaires et circulaires– Implémentation virgule fixe– Implémentation virgule fixe
• Filtres RII– Structures : forme I, II, II transposée– Décomposition cascade
• Quantification des coefficients– Perturbation des pôles et des zéros– Perturbation des pôles et des zéros
• Quantification et saturation des signaux– Facteurs d’échelle– Choix des facteurs d’échelle
220

AnnexesAnnexes
221

Bibliographie
• A.Bateman, I.Paterson-Stephens. The DSP handbook. Prentice Hall.handbook. Prentice Hall.
• G.Baudoin, F.Virolleau. Les DSP - Famille TMS320C54x - Développement d'applications. Dunod.
222

Ressources en ligne
• Ressources générales sur les DSP
– www.bdti.com– www.bdti.com
– www.insidedsp.com
• Constructeurs
– dspvillage.ti.com
– www.analog.com/processors– www.analog.com/processors
– www.freescale.com
– www.starcore-dsp.com
223