Embed Size (px)
Citation preview

PPE – 2008-2009 : Le Robot Lanceur de Balles
Par : Soraya HIMOUR Antoine MATYJA Florentin DEVOS Antoine SAELEN

Problématique Comment, dans le cadre du challenge robotique, permettre
au robot de projeter des balles de ping-pong?
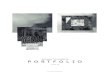
Lanceur de balles
Lancer les balles
Balles en position initiale Balles dans le filet
Énergie électrique

Sommaire- Présentation générale du projet
Partie 1 : Mécanique- Schéma cinématique- Représentation sous Solidworks- Calculs mécaniques
Partie 2 : Électronique- Tests moteur- Mise en marche du moteur
Partie 3 : Maquette- Présentation- Démonstration

Présentation générale

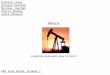
diagramme pieuvre:
SystèmeDe Projection
Robot télécommandé
Cible aAtteindre
Cibleaatteindre
FP1
énergie
FC3
Encombrement
PrécisionDe laProjection FC2
FC1
Présentation générale

Présentation générale

I) Partie Mécanique1- Schéma cinématique - Logiciel Schématrice et Photofiltre
2- Réalisation SolidWorks- Logiciel SolidWorks
3- Calculs mécaniques- Applet JAVA

1.1)Schéma cinématique

1.2) Représentation sous Solidworks

Choix de la vitesse de la balle
1.3) Calculs mécaniques

Choix de la vitesse de la balle

Calcul du diamètre des pouliesDonnées
Vitesse de la balle (V): 5.5 m/sVitesse de rotation du moteur (ωm): 523.6 rad/sRayon des rouleaux (R): 0.016725 m
ωs=V/R=5.5/0.01670085 rad/s
k=ωs/ωm=Dm/Ds=328.85/523.6=1/1.6

Partie 2 : Électronique

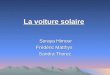
2.1) Tests du moteur
0
1000
2000
3000
4000
5000
6000
1 2 3 4 5 6
U (V)
N (tr/min)
U (V) 0 1 2 3 4 5
N (tr/min) 0 450 1750 2800 3850 5000

2.2) Programmation

Partie 3 : maquetteRespect de l‘encombrement

Partie 3 : maquettePrésentation
A présent nous allons vous présenter la maquette réelle.
Passons dans le laboratoire.




![[Antoine Arnauld, Pierre Nicole] Antoine Arnauld a(BookZZ.org)](https://img.pdfslide.fr/doc/110x75/577cc7a81a28aba711a1952e/antoine-arnauld-pierre-nicole-antoine-arnauld-abookzzorg.jpg)