Embed Size (px)
Citation preview

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
1 / 10
Activité découverte
Exploration
Présentation
Cette activité va vous permettre de découvrir la robotique. Elle s’articule autour du robot FORMULA, de
pièces mécaniques et de logiciel de programmation.
Elle est la première activité d’une série qui a pour objectif : la découverte d’un panel des fonctionnalités du
robot FORMULA.
Par la suite, vous serez amené à réaliser un projet centré sur le Robot FORMULA. Et dans lequel vous
devrez utiliser les compétences et l’expérience acquise aux cours de ces activités de découvertes.
Le matériel
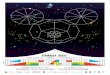
Pour bien débuter, il est indispensable de bien connaitre le matériel. Le schéma suivant détaille l'extérieur du
robot :

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
2 / 10
Activité découverte
Exploration
Présentation du logiciel FLOWCODE
Création d'un projet FORMULA
1. Ouvrir FlowCode
2. Choisir « Créer un nouvel algorigramme FlowCode »
3. Choisir " Formula FlowCode Buggy"
4. Insérer l'icône Formula. . . . . . La simulation du robot apparaît
5. Pour ajouter une fonction dans l’algorigramme : Faire glisser déposer dans l'algorigramme

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
3 / 10
Activité découverte
Exploration
6. Pour ajouter une macro FORMULA
On utilise l’icône ‘’ Routine composant ‘’
Quand la routine est insérée, un double clic sur l'icône ouvre le menu de Propriétés des macros et permet à
l'utilisateur de sélectionner la macro.
Pour une utilisation optimale de FlowCode et du robot Formula utiliser les documents :
-Notice-FLOWCODE
-Description du robot FORMULA
Pour la suite on créera un projet FlowCode par activité réalisé. Le nom du projet devra permettre
d’identifier facilement son action : aller-retour, demi-tour, capteur son, detection_sol1, detection_sol2
…. Etc.
7. Comment transférer le programme dans le robot
a. Connecter le robot au PC b. Mettre sous tension le robot (ON)
c. Cliquer sur l’icône Compiler vers Puce d. Appuyer sur le bouton reset du robot.
8. Pour démarrer le robot après la programmation, vous devez appuyer sur le bouton SW4.
ON
RESET

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
4 / 10
Activité découverte
Exploration
Analyse de la bibliothèque de macros
Analyse N°1 : Commande des moteurs. Lire la documentation technique (4.2)
Quel est le nom de la macro qui permet de faire avancer le robot ?…………………………
A partir de quel pourcentage de puissance les moteur commencent à fonctionner ?……………%
Calculer la valeur décimale que représente ce pourcentage si 255=100% ? ……
Le processeur du robot interprète des mots binaires écrits en OCTETS
Par conséquence de nombreuses macros feront appel à des paramètres écrits en OCTETS
Un OCTET est un mot binaire composé de 8 bits :
Pour trouver la conversion en décimal, il faut additionner les puissances de 2 correspondantes avec le
tableau :
Exemple : (11111111)b = 1x(2^7)+ 1x(2^6)+ 1x(2^5)+ 1x(2^4)+ 1x(2^3)+ 1x(2^2)+ 1x(2^1)+ 1x(2^0)
Calculer l’opération précédente = ……..
Quelle macro correspond à l’arrêter le robot ? …………………
Quel est le nom de la macro qui permet de faire reculer le robot ?…………………………
Quel est le nom de la macro qui permet de faire tourner le robot en contrôlant la vitesse sur chacun des
moteurs?…………………………
Comment réagit le moteur si on inscrit une valeur négative dans cette macro?
……………………………..
Sur FlowCode,
Réaliser un programme qui permet de :
-faire avancer le robot à pleine vitesse pendant 4 secondes,
-s’arrête pendant 1 seconde,
-et tourne sur lui-même pendant 3s.
(Utiliser la fonction Délais pour temporiser le parcours)
Simuler le programme en cliquant sur l’icone Executer.
Recopier l’algorigramme sur votre document lorsque le robot répond à votre parcours.

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
5 / 10
Activité découverte
Exploration
Analyse N°2 : Commande des LED. Lire la documentation technique (4.3)
Quel est le nom de la macro qui permet d’allumer les LED du
robot ?…………………………
Créer le programme qui permet de faire clignoter les LED :
0, 2, 4, 6 puis les 1, 3, 5, 7 :
Par intervalle de 0.5 secondes, pendant 8 secondes.
Pour cela, vous allez devoir utiliser une boucle dans votre programme.
Paraméter les proprietes de la boucle pour respecter l’enoncé de l’exercice.
Simuler le programme en cliquant sur l’icone Executer.
Recopier l’algorigramme sur votre document.
Analyse N°3 : Lecture d’un interrupteur. Lire la documentation technique (4.4)
Afin d’interpréter des paramètres d’entrées, la programmation
nécessite de définir des variables.
Une variable correspond à une valeur numérique ou à un état binaire
0 ou 1.
Dans le cas des interrupteurs du robot, il faut définir des variables
associés au bouton droit et gauche.
Pour cela, on va créer les variables BP_gauche et BP_droit.
Quel est le nom de la macro qui permet de lire l’état d’un bouton poussoir et d’écrire l’état dans la mémoire
d’une variable ?…………………………
Si on choisit Sensor 0
Quelle variable devra etre écrite:
(droit ou gauche)
BP_.....................

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
6 / 10
Activité découverte
Exploration
Analyse N°4 : Prise de décision par lecture d’un interrupteur. Documentation technique (4.4)
Pour que le robot devienne « intelligent » il faut qu’il prenne des
décisions en fonction de son environnement.
Pour cela, il faut obligatoirement que :
- son programme s’exécute en boucle.
- qu’il lise l’état d’une entrée.
- qu’il prenne une décision en fonction de l’état de l’entrée.
Compléter l’algorigramme :
La LED 0 doit s’allumer pendant 3s après avoir appuyé sur le Bouton Poussoir gauche.

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
7 / 10
Activité découverte
Exploration
Analyse N°5 : Prise de décision par mesure de proximité infra rouge. Documentation technique (4.8)
Quel est le nom de la macro qui permet de lire la distance entre un objet et le robot afin de l’écrire dans la
mémoire d’une variable ?…………………………
Si on observe le graphique ci-contre :
La variable doit être écrite en :
OCTET (0 à 255) ou en ENTIER (0 à 1024) ?
………………………………………….
Pour une distance de 5 cm, quelle sera la
valeur de la variable Distance_AV du capteur
infrarouge avant ? …………………
Ecrire l’algorigramme qui permet d’allumer les LED de 0 à 7 en fonction de la distance d’un objet situé
entre 2 et 9 cm de l’avant du robot. (Astuce : utilisez la multi décision )

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
8 / 10
Activité découverte
Exploration
Programmation et manipulation du robot pour l’activité découverte
1.Faire un aller-retour
- Le robot doit effectuer un aller-retour en 10s (5s en marche
avant et 5s en marche arrière)
- Dessiner l'algorigramme, tester et faire vérifier
2.Faire un demi-tour
- Le robot doit se déplacer en marche avant pendant 5s et faire demi-tour afin de
revenir au point de départ en 5s.
- Dessiner l'algorigramme, tester et faire vérifier
3.Trajectoires
- Le robot doit effectuer un carré pendant son déplacement en environ 15s
- Dessiner l'algorigramme, tester et faire vérifier
- Programmer les trajectoires ci-dessous
- Dessiner l'algorigramme, tester et faire vérifier 4.Capteur de lumière
- Le robot ne commence un parcours, laissé au choix, que s’il détecte une lumière
suffisamment importante.
- Dessiner l'algorigramme, tester et faire vérifier
5.Capteur de son
- Le robot démarre lorsqu’il détecte un bruit suffisamment fort. Le parcours est
laissé au choix.
- Dessiner l'algorigramme, tester et faire vérifier
6.Détection de bande au sol
Le robot est placé avant une ligne il doit avancer vers la ligne,
s'arrêter sur la ligne et produire un son avec le buzzer une fois à
l’arrêt.
- Dessiner l'algorigramme, tester et faire vérifier
7.Détection d'obstacles
- Le programme est le même que précédemment, mais on arrête le robot si le capteur
face détecte un obstacle.
- Dessiner l'algorigramme, tester et faire vérifier

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
9 / 10
Activité découverte
Exploration
Programmation et manipulation du robot (ajout d’un servomoteur)
Commande des servomoteurs Les servomoteurs sont prévus pour être commandés facilement en
position. En effet, ils sont équipés d’un système d’asservissement
basé sur un potentiomètre rotatif qui sert de capteur de position.
Ils sont faciles à utiliser car ils ne nécessitent que :
- une source de tension continue 5V
- un signal de commande PWM (Pulse Width Modulation) du
microcontrôleur de votre robot
Les servomoteurs possèdent 3 fils de connexion de couleurs
différentes :
- Le noir – La masse
- Le rouge – La tension d’alimentation continue (+)
- Le blanc – Le signal de commande
Le branchement est donc simple, il faut :
- Connecter le connecteur sur la sortie RB6 ou RB7 de votre robot.
A partir de là, tout ce qu’il vous reste à faire est de créer le signal de
commande de votre servomoteur.
Ce signal de commande n’est rien d’autre qu’un signal logique
périodique. C’est pour ça qu’il est facile à générer à partir d’un
microcontrôleur. La largeur des créneaux va commander l’angle de
l’axe du servomoteur. La durée du créneau doit être comprise entre 1
et 2ms. Une durée de 1ms correspond à l’angle 0° et 2ms correspond
à l’angle 180°.
La période entre deux créneaux doit être de 20ms maximum.

NOM : Prénom : Classe :
ROBOTIQUE
FORMULA FLOWCODE
10 / 10
Activité découverte
Exploration
Écrire l’algorigramme qui permet de positionner le servomoteur en position centrale. Tester et faire vérifier
Astuce, pour commander le signal sur le port RB7, il
faut faire basculer la sortie RB7 de la valeur 0 à la
valeur 1 comme décrit précédemment.
Une des fonctions à utiliser dans flowcode est
« Sortie» :
Pour aller plus loin, Écrire l’algorigramme qui permet de positionner le servomoteur en position minimale
puis en position maximale (-90° +90°) si l’utilisateur appui sur le bouton SW5. Tester et faire vérifier