Embed Size (px)
Citation preview

LEns
E
Projets ProTISProcédés de Traitement de l’Information et du signal.ETI et ProTIS
OptiqueSystèmes
2A - TPs et projets ProTISProcédés de Traitement de l’Information et du Signal
Capteur Mise enforme
Conversionanalogiquenumérique
Traitementnumérique
Conversionnumériqueanalogique
Mise enforme
Contrôle/puissance
Micro-contrôleur DsPic
Exemple :Asservissement numériquede la température LED
Régulation en température d’une LED de puissance
Shiyu HUA Jérôme LE JALLÉ
Une LED de puissance voit ses performances dégradées, sa durée de vie limitée, et peut être détruite lorsque sa température de fonctionnement est trop importante. Le but de ce projet est de réguler en température une LED de puissance afin d’éviter ces problèmes.
Schéma de principe En fonction de la mesure de température, le microcontrôleur décide de la vigueur avec laquelle la LED doit être refroidie.
1
L’information est envoyée au CNA qui convertit la valeur numérique qu’on lui fournit en une tension analogique.
2
Cette tension est utilisée pour piloter une diode Push Pull.
3
La diode pilote en courant le module Peltier.
4
Un module Peltier est utilisé pour abaisser la température de la LED par refroidissement thermoélectrique.
5 En chauffant, la LED va également augmenter la température de la thermistance qui lui est collée.
6
La thermistance voit sa résistance varier avec sa température. Cette thermistance est placé dans un pont diviseur de tension, alimenté avec 10V.
7
La tension aux bornes de la thermistance va donc varier avec la température. Cette tension est reliée à l’entrée d’un CAN.
8
Le signal numérique résultant est transmis au microcontrôleur. Celui-ci va traiter la donnée, porteuse de l’information sur la température de la LED, afin d’enclencher sa régulation.
9
Régulation par le microcontrôleur La régulation de la température est effectuée à l’aide d’un correcteur PID numérique. Ce régulateur fait la somme pondérée d’un terme proportionnel à l’erreur actuelle (température actuelle – consigne), d’un terme proportionnel à la somme des erreurs précédentes, et d’un troisième terme proportionnel à la dérivée actuelle de la température. En choisissant correctement les coefficients de pondération, on peut obtenir une régulation en température qui soit précise, rapide, et stable.
Pourquoi une diode Push Pull? Le module Peltier doit être piloté avec de grands courants, ce que n’est pas capable de fournir le microcontrôleur. On utilise donc une diode Push Pull, pilotée avec de faibles tensions. Cette diode est reliée à un générateur de tension/courant. Selon la tension de commande qu’on lui envoie, la diode Push Pull va transmettre plus ou moins de courant vers le module Peltier, et ainsi piloter le refroidissement de la LED.
Mesure de température En mesurant la tension aux bornes de la thermistance, on en déduit sa résistance. Avec la caractéristique ci-dessous, on mesure donc finalement la température au plus proche de la LED.
Réglage et affichage La température mesurée est affichée au dessus de la température de consigne, que l’on règle au degré près à l’aide de deux boutons poussoirs.
Boutons poussoirs
Thermistance LED Peltier
Traitement=
Filtrage numérique
Journée scientifique du LCF LEnsE
Présentation 1
Objectifs 1
Livrables 1
Évaluation 2
Inscriptions 2
Commande de matériel et réalisation de carte 2
Sujets proposés 2
1 Régulation en température d’une LED de puissance 3
2 Détermination du point de rosée par procédé optique 4
3 Tracker de spot lumineux 5
4 Asservissement numérique de la position d’un spot laser 6
5 Mesure d’angle d’inclinaison à l’aide d’un niveau électronique 7
6 Régulation de couleur d’un éclairage à LED 8
7 Protocole de communication par la lumière 9
8 Transmission numérique Li-SPI 10
9 Robot "Folliogs The Line" 11
Cycle Ingénieur - 2ème année 2S - PalaiseauVersion du 8 mars 2016
Année 2015-2016
Xavier DÉLENFabien ADAM
Henri BENISTYJulien VILLEMEJANE
Fabienne BERNARD

Présentation
ObjectifsLe projet de Procédés de Traitement de l’Information et du Signal est l’occasion de réaliser en 4 séances un
dispositif associant des fonctions d’électronique analogique et de traitement numérique temps-réel au serviced’une application technique. Il permet de faire la synthèse des connaissances acquises dans les enseignementsd’Electronique pour le Traitement de l’Information suivis en première année et des enseignements de ProTIS dedeuxième année. Ce projet est, de plus, l’occasion de mettre en pratique quelques notions de gestion de projet :planification et organisation. Enfin, en présentant votre travail sous forme de poster, de montage vidéo ou depages web, vous développerez votre savoir-faire en présentation scientifique.
LivrablesAu cours des différentes séances de travail, vous aurez à produire divers documents. Ces documents pour-
suivent plusieurs buts :— vous aider à structurer votre projet,— vous permettre de faire le point sur l’avancement de votre projet,— vous permettre de travailler dès les premières séances sur les documents que vous nous rendrez à l’issue
du projet,— nous permettre de suivre au mieux l’avancement de vos projets,— nous permettre, le cas échéant de mieux vous guider dans les projets.Il s’agit à chaque fois de documents rapides à mettre à jour (1 page maximum par document). Vous devrez les
présenter au cours des séances aux enseignants qui vous encadreront (ce qui ne vous empêche pas d’y réfléchirentre 2 séances). Il s’agit aussi de documents de travail donc qui vont évoluer au cours des séances.
En voici la liste :Au cours de la séance 1 :
1. Un cahier des charges reformulé (moins d’1/2 page),2. une planification des séances à venir : vous identifierez diverses fonctionnalités et/ou diverses tâches (au
moins 5) et vous indiquerez sur une feuille Excel (ou en donnant le lien vers un logiciel de planificationen ligne comme Trello par exemple), quand vous pensez les mettre en œuvre.
Au cours de la séance 2 :1. La planification remise à jour.2. Un résumé sur une dizaine de lignes détaillant les fonctionnalités validées et les problèmes rencontrés
au cours de la séance.3. Une description fonctionnelle de votre projet. Ce document se présente à priori sous une forme graphique
(mais vous restez libre de la forme) et fait apparaître la description de l’architecture du projet (les fonc-tionnalités, leurs interdépendances, la façon dont elles s’enchaînent, ...) ainsi que les entrées-sorties dusystème. Il se peut que pour certains projets une représentation sous forme d’un chronogramme présen-tant l’enchainement des tâches soit plus appropriée. Vous ferez aussi apparaître explicitement sur ce quiest validé, ce qui est en cours de réalisation, et ce qui reste à venir. Ce document devra faire 1 ou 2 pagesmaximum.
Au cours des séances 3 et 4 :1. La planification remise à jour,2. le résumé sur une dizaine de lignes détaillant les fonctionnalités validées et les problèmes rencontrés au
cours de la séance,3. la description fonctionnelle de votre projet remise à jour,4. la nomenclature des composants (et éventuellement des logiciels ou matériel en plus), comportant les
fabricants, les références, les liens web et le coût des composants utilisés (sur une feuille Excel).
1

2
A rendre à l’issue du projet :1. Un dossier technique comprenant :
(a) les programmes réalisés,(b) la nomenclature et le coût de votre projet,(c) la planification effectivement tenue,(d) un mode d’emploi succinct (moins de 2 pages). Sur ce mode d’emploi figurera des photos commentées
du projet. On connaîtra ainsi tous les branchements nécessaires ainsi que le mode opératoire.(e) Une description de l’architecture du projet où on trouvera :
— Les entrées-sorties,— Le découpage fonctionnel du projet (matériel / logiciel /...),
2. Vous nous remettrez de plus un document présentant le projet sous forme soit d’un poster, soit d’unmontage vidéo, soit d’un mini-site web. Le public auquel devra s’adresser ce documents correspond auxélèves de 1ère année.
La date limite de remise de ces documents est fixée au 05 mai 2016, soit la semaine après les vacances deprintemps, la dernière séance ayant lieu juste avant les vacances. scolaires.
La journée du 13 mai, consacrée aux projets scientifiques des élèves à l’IOGS (PIMS et FIE principalement)peut être aussi l’occasion pour certains d’entre vous de présenter votre travail autres élèves et aux personnels.
ÉvaluationLa note de projet ProTIS est composée de trois parties :8 points Travail lors des séances6 points Livrables techniques6 points Poster/Site Web
et elle contribue à hauteur de 15% de l’UE Systèmes S2.
InscriptionsLes inscriptions se font via une application web entre le jeudi 10 mars à 20h00 et le vendredi 11 mars à
13h00. Les binômes peuvent être différents de ceux de TP. Le nombre de binômes par groupe traitant le mêmesujet est limité pour des raisons de disponibilité de matériel.
Des sujets proposés par vos soins sont les bienvenus, pensez à nous les soumettre (par email ou en venanten discuter avec les enseignants) pour que nous les validions si ils nous semblent convenir.
En particulier, les élèves dont le PIMS ou le projet FIE comporte un système de traitement numérique dusignal, peuvent inclure (après validation par les enseignants) leur projet de ProTIS dans ce projet plus large.
Commande de matériel et réalisation de cartePour tous les projets, du matériel peut être commandé mais prévoir une semaine de délai (et notre accord
sur le coût). De même, une carte peut être réalisée. Mais là aussi, il faut prévoir quelques jours de délai.

Sujet 1
Régulation en température d’une LEDde puissance
(4 binômes max)
ETI et ProTISOptiqueSystèmes
2A - TPs et projets ProTISProcédés de Traitement de l’Information et du Signal
Capteur Mise enforme
Conversionanalogiquenumérique
Traitementnumérique
Conversionnumériqueanalogique
Mise enforme
Contrôle/puissance
Micro-contrôleur DsPic
Exemple :Asservissement numériquede la température LED
Régulation en température d’une LED de puissance
Shiyu HUA Jérôme LE JALLÉ
Une LED de puissance voit ses performances dégradées, sa durée de vie limitée, et peut être détruite lorsque sa température de fonctionnement est trop importante. Le but de ce projet est de réguler en température une LED de puissance afin d’éviter ces problèmes.
Schéma de principe En fonction de la mesure de température, le microcontrôleur décide de la vigueur avec laquelle la LED doit être refroidie.
1
L’information est envoyée au CNA qui convertit la valeur numérique qu’on lui fournit en une tension analogique.
2
Cette tension est utilisée pour piloter une diode Push Pull.
3
La diode pilote en courant le module Peltier.
4
Un module Peltier est utilisé pour abaisser la température de la LED par refroidissement thermoélectrique.
5 En chauffant, la LED va également augmenter la température de la thermistance qui lui est collée.
6
La thermistance voit sa résistance varier avec sa température. Cette thermistance est placé dans un pont diviseur de tension, alimenté avec 10V.
7
La tension aux bornes de la thermistance va donc varier avec la température. Cette tension est reliée à l’entrée d’un CAN.
8
Le signal numérique résultant est transmis au microcontrôleur. Celui-ci va traiter la donnée, porteuse de l’information sur la température de la LED, afin d’enclencher sa régulation.
9
Régulation par le microcontrôleur La régulation de la température est effectuée à l’aide d’un correcteur PID numérique. Ce régulateur fait la somme pondérée d’un terme proportionnel à l’erreur actuelle (température actuelle – consigne), d’un terme proportionnel à la somme des erreurs précédentes, et d’un troisième terme proportionnel à la dérivée actuelle de la température. En choisissant correctement les coefficients de pondération, on peut obtenir une régulation en température qui soit précise, rapide, et stable.
Pourquoi une diode Push Pull? Le module Peltier doit être piloté avec de grands courants, ce que n’est pas capable de fournir le microcontrôleur. On utilise donc une diode Push Pull, pilotée avec de faibles tensions. Cette diode est reliée à un générateur de tension/courant. Selon la tension de commande qu’on lui envoie, la diode Push Pull va transmettre plus ou moins de courant vers le module Peltier, et ainsi piloter le refroidissement de la LED.
Mesure de température En mesurant la tension aux bornes de la thermistance, on en déduit sa résistance. Avec la caractéristique ci-dessous, on mesure donc finalement la température au plus proche de la LED.
Réglage et affichage La température mesurée est affichée au dessus de la température de consigne, que l’on règle au degré près à l’aide de deux boutons poussoirs.
Boutons poussoirs
Thermistance LED Peltier
Traitement=
Filtrage numérique
Journée scientifique du LCF LEnsE
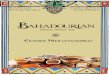
1 ProblématiqueLes LEDs de puissance voient leurs performances
dégradées, leur durée de vie limitée, et peuvent êtredétruite lorsque leur température de fonctionnementdevient trop importante. Ce projet vise à asservir entempérature une LED de puissance à l’aide d’un mo-dule à effet Peltier, capable de refroidir le substratde la LED et ainsi garantir un fonctionnement per-formant sur le long terme.
2 Cahier des charges
AlimPuissance Peltier
Capteur
Microcontrôleur
Ordinateur
LED
Consigne
Mesure
FIGURE 1.1 – Principe de l’asservissement en tempé-rature
La LED de puissance et le module Peltier sontfournis, on souhaite asservir numériquement à uneconsigne réglable (par exemple 25 ◦C) sa tempéra-ture externe. Dans tous les cas, on veillera à protéger
la LED de façon à ce qu’elle ne puisse pas être dé-truite (en cas d’anomalie, on coupe l’asservissement,et on coupe la commande de la LED). La consignepourra être réglée dans un 1er temps par un poten-tiomètre, puis dans un second temps être comman-dée de façon informatique (un PC envoie une valeurà la carte DSPIC). La principe d’un tel asservisse-ment est donné figure 1.1.
3 Une liste non exhaustive desparties à traiter
— Étudier les caractéristiques tant électriquesque thermiques de la LED de puissance,
— concevoir un module de commande en puis-sance du Peltier,
— mettre en œuvre la mesure de température àl’aide d’une thermistance,
— modéliser le système thermique,— programmer une carte DSPIC de façon à réali-
ser l’asservissement numérique (P, PI ou PID),— quantifier les performances de la boucle d’as-
servissement.
4 Pour démarrer le projet— tester le fonctionnement de la LED, du module
Peltier, de la thermistance,— concevoir le circuit de commande du Peltier,— concevoir le circuit de mesure de température.
5 Partie(s) électronique(s) àréaliser
La partie commande en puissance et le circuit demesure de la température.
6 L’existantPeuvent être utilisés :— une maquette LED de puissance + Peltier,— une carte de développement avec le boîtier
d’interface utilisés en TP.
3

Sujet 2
Détermination du point de rosée parprocédé optique
(4 binômes max)
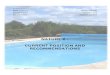
1 ProblématiqueIl s’agit de réaliser un système mixte optique-
électronique permettant de déterminer la tempéra-ture de rosée. Ce point de rosée va être détecté parl’apparition de rosée sur la surface d’un prisme portéà une température suffisamment basse. Comme ildépend des conditions de température et de pression(... et d’hygrométrie !) , on pourra aussi en faire l’ac-quisition. Ce système peut être utilisé dans des me-sures météorologiques, ou bien dans des systèmes detype essuie-glaces automatiques.
2 Cahier des charges
AlimPuissance Peltier Capteur
Microcontrôleur
Source
Détecteur
Mesure de température
FIGURE 2.1 – Schéma de principe du dispositif.
Le dispositif exploite le principe de la réflexionfrustrée. Une lumière émise va traverser un prisme
puis se réfléchir sur une autre face avant d’être cap-tée en sortie. On va refroidir le prisme jusqu’à l’ap-parition du point de rosée qui modifie les conditionsde réflexion.
3 Une liste non exhaustive desparties à traiter
— Tester la transmission optique— Tester la transmission frustrée (sans refroi-
disseur)— Concevoir un circuit pilotant le refroidisseur
Peltier— Tester la commande (mode refroidissement
uniquement)— Réaliser le contrôle de l’asservissement— Réaliser l’asservissement— Remonter les données vers le PC
4 Pour démarrer le projet— Mettre en œuvre la transmission optique et
détecter le signal— Mettre en œuvre la réflexion frustrée— Modéliser le système thermique— Piloter le module de refroidissement
5 Partie(s) électronique(s) àréaliser
Les circuits électroniques qui pilotent la source(LED), le peltier ainsi que le circuit de détection(photodiode) et le circuit de mesure de la tempéra-ture sont à réaliser.
6 L’existantPeuvent être utilisés :— Une maquette existante, comportant un
prisme monté sur un module Peltier et dessupports pour des fibres plastiques.
— une carte de développement et un boîtier d’in-terfaçage.
4

Sujet 3
Tracker de spot lumineux
(1 binôme max)
1 Problématique
On souhaite asservir la position d’une pièce méca-nique à celle d’une autre pièce en mouvement. Pourcela, la pièce "maître" va émettre un spot lumineuxvers la pièce "esclave" et le système doit asservir nu-mériquement la position spot reçu.
2 Cahier des charges
On souhaite imposer un mouvement à un objetmaître dans un premier temps de façon mécanique,dans un deuxième temps par l’intermédiaire du po-tentiomètre de la carte Dspic, et dans un troisièmetemps à partir du PC). Cet objet maître qui va se dé-placer sur le rail de la maquette Labview, va émettreun spot lumineux en direction de l’esclave. Le secondobjet est muni d’une barrette CCD. Le système doitasservir numériquement la position du récepteur defaçon à ce que le spot soit toujours au centre de labarrette. Une fois le système réalisé, on testera soncomportement vis-à-vis de variations rapides.
Mobile en translationRécepteur
EmetteurMobile en translation
FIGURE 3.1 – Schéma de principe du dispositif.
3 Une liste non exhaustive desparties à traiter
— Etudier les caractéristiques des servomoteurs— Etudier les caractéristiques de la barrette
CCD TAOS TSL201R— Piloter les moteurs— Piloter les moteurs à partir du PC ou d’un po-
tentiomètre— Programmer une carte DSPIC de façon à cen-
trer le spot.— Programmer une carte DSPIC de façon à réali-
ser l’asservissement numérique (P, PI ou PID)
4 Pour démarrer le projet— Contrôle des moteurs— Commander une barrette CCD— Détecter un déplacement
5 Partie(s) électronique(s) àréaliser
Peu ou pas d’électronique à réaliser
6 L’existantPeuvent être utilisés :— Deux maquettes avec servomoteurs,— une maquette de développement et un boîtier
d’interfaçage.
5

Sujet 4
Asservissement numérique de laposition d’un spot laser
(1 binôme max)
1 ProblématiqueIl s’agit de réaliser un asservissement en position
d’un spot laser à l’aide d’un actionneur galvanomé-trique et d’une photodiode 4 quadrants.
2 Cahier des chargesAprès une phase de recherche du capteur, le fais-
ceau Laser doit rester au centre de la photodiode 4quadrants au cours de ces déplacements.
Circuit électronique
Photodiode4 quadrants
Support mobile
Miroir sur l'axe du scanner
Source Laser HeNe
Alimentationscanner
Correcteur Numérique CANCNA
MesureCommande
FIGURE 4.1 – Schéma de principe du dispositif.
3 Une liste non exhaustive desparties à traiter
— Réaliser l’électronique du capteur, on souhaiteobtenir un signal de l’ordre du volt proportion-nel a la position du spot,
— Concevoir et mettre en œuvre le correcteur nu-mérique pour que le miroir compense le dépla-cement des photodiodes.
— Prévoir le prépositionnement automatique(balayage et détection du capteur).
4 Pour démarrer le projet— Réalisation du capteur 4 quadrants,— Modélisation du système (tests indiciels et fré-
quentiels),— Mise en place du balayage et de la détection
du capteur pour le prépositionnement.
5 Partie(s) électronique(s) àréaliser
Le circuit du capteur 4 quadrants.
6 L’existantPeuvent être utilisés :— La carte de développement, le boîtier d’inter-
façage,— Les alimentations des actionneurs galavano-
métriques,
6

Sujet 5
Mesure d’angle d’inclinaison à l’aided’un niveau électronique
(3 binômes max)
Support
AccéléromètreA l'horizontal les Leds sont éteintes
1 ProblématiqueOn souhaite concevoir un niveau électronique à Leds. Pour cela on propose d’utiliser des accéléromètres 3
axes (que l’on trouve par exemple dans certains téléphones portables ou dans des manettes de jeux vidéos).Les mesures des 3 accéléromètres permettent de connaître l’angle d’inclinaison par rapport à la verticale,
car le composant est sensible à la gravité.
2 Cahier des chargesOn souhaite associer les accéléromètres à un microcontrôleur de façon à avoir :
1. un premier mode de fonctionnement :(a) on affiche sur 2 Leds le fait que le capteur est, selon un des axes x ou y, plus incliné d’un côté que de
l’autre. Une alternative possible est d’utiliser l’afficheur LCD.(b) détection de l’horizontalité : si l’angle est inférieur à un seuil (à déterminer) selon les 2 axes, l’utilisa-
teur est prévenu par un affichage dédié.2. un deuxième mode de fonctionnement, permettant la mesure et l’affichage des angles d’inclinaison.
Vous disposez d’accéléromètres 3 axes ADXL335 d’Analog Devices .
3 Premières étapes1. Tester le composant. Quelle est sa sensibilité ? La valeur d’un offset éventuel ?2. Concevoir et tester l’électronique de mise en forme.3. Concevoir et tester les programmes de mesure des 3 voies de l’accéléromètres.4. Concevoir les modalités d’affichage.
7

Sujet 6
Régulation de couleur d’un éclairage àLED
(3 binômes max)
1 ProblématiqueLe développement des LEDs de puissance a per-
mis l’apparition d’éclairages sophistiqués, dont lacouleur peut être ajustée par l’utilisateur (habitaclesde voiture, surfaces commerciales, etc) Cet ajuste-ment de couleur peut conduire à des éclairages d’am-biances très colorés ou à des optimisations du "blanc"recherché.
2 Cahier des chargesAjuster la couleur de l’éclairage en temps réel, à
l’aide d’une LED trichrome et d’un capteur de cou-
leur.
3 Une liste non exhaustive desparties à traiter
— Circuit de commande des LEDS,— Circuit de détection à base d’un capteur RGB
(Kingbright 5130)— Asservissement de la couleur, la consigne pou-
vant être pilotée par l’ordinateur.
4 Pour démarrer le projetChoisir un composant disposant de 3 sorties
PWM.
5 Partie électronique à réaliserCommande LED trichrome. Amplificateurs trans-
impédance.
8

Sujet 7
Protocole de communication par lalumière
(2 binômes max)
1 ProblématiqueTel le Wi-Fi (Wireless Fidelity), qui transporte
des informations numériques à l’aide d’ondes hert-ziennes, le Li-Fi (Light Fidelity) utilise la lumièrepour transporter ce même type d’informations. L’idéede ce projet est de développer un émetteur et unrécepteur basé sur ce principe et mettre en placeun protocole de communication permettant la com-mande d’un mini-robot via la lumière. L’émetteur etle récepteur seront réalisés autour d’un microcontro-leur.
Le robot ne sera pas étudié dans ce projet.
2 Cahier des chargesLa communication établie sera asynchrone.
Seules les données seront transmises en modulantla source lumineuse autour d’un point de fonctionne-ment.
La difficulté est donc de proposer un protocole detransmission de cette information garantissant la re-synchronisation de l’horloge du récepteur par rap-port à celle de l’émetteur.
La liste des commandes auxquelles le robot réagitest la suivante :
— Avancer pendant x secondes— Reculer pendant x secondes— Tourner à gauche de x degrés— Tourner à droite de x degrès— Avancer— Reculer— Stopper
3 Une liste non exhaustive desparties à traiter
— Définir un protocole de communication unidi-rectionnel asynchrone
— Réaliser l’étage de puissance des LEDs del’émetteur
— Concevoir la commande de cet étage via uncomposant programmable
— Réaliser le récepteur et l’affichage des donnéesreçues sur un écran LCD
4 Pour démarrer le projetAfin de pouvoir mettre en place un tel protocole
de transfert de données numériques, on pourra s’in-téresser au protocole CAN, qui est asynchrone.
5 Partie électronique à réaliser— Modulation et amplification en courant des si-
gnaux à transmettre— Démodulation du signal reçu
9

Sujet 8
Transmission numérique Li-SPI
(2 binômes max)
1 ProblématiqueTel le Wi-Fi (Wireless Fidelity), qui transporte
des informations numériques à l’aide d’ondes hert-ziennes, le Li-Fi (Light Fidelity) utilise la lumièrepour transporter ce même type d’informations, touten permettant l’éclairage d’un lieu.
L’idée de ce projet est de développer un émetteuret un récepteur basé sur ce principe pour pouvoirtransmettre du son entre émetteur (une source delumière ambiante - ici une LED de puissance) et unrécepteur.
2 Cahier des chargesLa communication entre ces deux éléments sera
basée sur le protocole SPI (Serial Peripheral Inter-face), à savoir une liaison série synchrone sur 3 ca-naux de communication : l’horloge, les données et lechoix de l’esclave (SS). Chacune de ces informationsviendra moduler une des trois LED de puissance decouleur différente (rouge pour l’horloge, vert pour lesdonnées et bleu pour le signal de validation - parexemple).
Les signaux sonores à transmettre seront limitésà la parole (BP d’environ 5 kHz).
3 Une liste non exhaustive desparties à traiter
Lors de ce projet, il sera intéressant de dévelop-per les parties suivantes :
— réaliser l’étage de puissance des LEDs del’émetteur
— concevoir la commande de l’émetteur / acqui-sition du signal audio ADC
— réaliser le récepteur : démodulation des 3 si-gnaux et décodage vers un DAC
4 Pour démarrer le projet— Tester le fonctionnement de le LED de puis-
sance— S’intéresser à la modulation du signal et les
diverses fréquences mises en jeu
5 Partie(s) électronique(s) àréaliser
— Mise en forme du signal d’entrée— Modulation et amplification en courant des si-
gnaux à transmettre— Démodulation du signal reçu
10

Sujet 9
Robot "Folliogs The Line"
(2 binômes max)
1 ProblématiqueOn se propose dans ce projet de développer
un robot suiveur de ligne basé sur un châssisexistant (Polulu) en utilisant un microcontroleurdsPIC30F4013/3014.
Deux sujets sont possibles :— Suivre une ligne sur le sol— Asservir le robot en distance par rapport à un
objetLe robot sera équipé de divers capteurs :— détecteurs optiques pour la détection de ligne— capteur de distance infrarouge— autres...
2 Cahier des chargesAu choix :
— Piloter le robot pour qu’il suive une ligne tra-cée sur le sol
— Asservir le robot à une certaine distance d’unobjet
3 Une liste non exhaustive desparties à traiter
— Faire l’acquisition des différents signaux pro-venant des capteurs
— Développer la commande en puissance desmoteurs (basée sur un pont en H - L293D)
— Faire le programme qui permet de piloter lerobot
4 Pour démarrer le projetOn pourra dans un premier temps mettre en
œuvre la commande en puissance des moteurs.
5 Partie(s) électronique(s) àréaliser
— Commande en puissance des moteurs(L293DNE)
— Mise en forme des signaux provenant des cap-teurs
— Carte électronique pour le positionnement desdétecteurs de ligne
11