Embed Size (px)
Citation preview
RADIO SYNCHRO-MOTEUR
par
Julien LOEB Ing6nieur en Chef des P. T. T.*
Jean Ren6 DUTHIL Ing6nieur en Chef *
Andr6 JEUDON Ing6nieur *
S O M M A I R E . - - On expose le problJme qui consiste ?t trans- poser, dans le domaine des liaisons radioglectriques, les procgdds de rgpgtition des mouvements d'un arbre, connus dans le domaine des liaisons par fil sous les noms de (~ selsyn , ou ~ synchro-moteur ,. On compare briJvement les caractjristiques de 2 classes de procgdds, dana lesquels l'angle ?t transmettre est reprJsentJ res- pectivement par une [rgquence et par une phase. Le reste du travail est eonsacrg d la reprJsentation des angles par des phases.
On examine successivement les solutions aux pro- blJme, suivants :
transmission de la phase de rg/grence ; rgalisation d'un dgphasage Jgal ?tun angle ; rgception directe (sans moteur local) ; rJception par servo-m~canismes, avec divers discri-
minateurs de phases (en particulier, des syst~mes uti- lisant des impulsions) ;
amplification du signal.
] . INTRODUCTION ; HISTORIQUE.
1,t. H i s t o r i q u e . - Par d6cision prise lors de la s6ance du 26 juin 1947 du Comit6 de Liaison, le C. N. E. T. a ordonn6 d'entreprendre une 6tude ayant pour objet l'obtention, par vole radio61ectrique, des r6sultats d6jh fournis, dans le domaine des com- munications par ill, par les appareils commun6ment appel6s Selsyns.
Au moment off l'6tude a 6t6 entreprise, les sys- t~mes suivants 6taient d6jh connus.
t,2. Appareil g modulation de frfiquence. -- En vue d'applications d6termin6es, il existe d6jh un mat6riel reposant sur l'asservissement radio- 61ectrique de 2 arbres : la position d'un arbre r~gle la fr6quence d'un oscillateur local. L'arbre corres- pondant du c5t6 r6ception agit sur un autre g6n6ra- teur dont la fr6quence est amen6e h coincider avec ceUe du premier g6n6rateur.
i,3. Appareil amfiricain de t~16mesure. - - La position d'un organe mobile, aiguille d'un altim~tre par exemple, est caraet6ris6e par la phase d'un eourant de basse fr6quenee (250 e/s dans l'exemple cit6). On transmet la phase de r6f6renee en doublant la fr6quence du g6n6ratcur local de telle fa~on que le courant contenant le renseignement (250 c/s) let le courant portant la phase de r6f6renee (500 e/s) puissent 6tre transmis simultan6ment sur une seule voie radio (Voir l'artiele D.W. MOORE Jr., Electronics, Nov. 1945, pp. 125-127).
* A la division T~ldcommande du D6par tement Radio du C. N. E . T .
1,4. Proe6d6 de la C le des Compteurs. - - B i e n qu'il ne s'agisse pas de t616commande h proprement parler, il y a lieu de signaler un proc6d6 d'affichage par vole radio d'un angle pour l'artillerie navale. C'est une 6tude command6e h la Compagnie des Compteurs par la Marine.
L'angle h transmettre est repr6sent6 par la phase d'un courant de basse fr6quence. Cette phase est transmise par voie radio sous forme d'impulsions de tr~s courte dur6e, dont la phase par rapport h la sinuso~de qui repr6sente la phase de r6f6rence sert
repr6senter l'angle. La transmission simultan6e par une seule voie radio est ainsi rendue possible grace au fait que les deux signaux n'occupent pas la mgme bande de fr6quences (Voir Brevet Compa- gnie des Compteurs N ~ 910.943, Oct. 1939).
1,5. Proe~fl~s r~oents. - - Depuis que l'6tude est en cours, nous avons e~ connaissance de 2 dis- positifs de transmission radio61ectrique des angles bas6s sur le mgme principe que celui du w t,2 savoir, la modulation de fr6quence (O. N. 1~. R. A. et S. T. A. t~.).
Ceci nous conduit h comparer tout d'abord les deux principes de modulation: en fr6quence et en phase.
2. COMPARAISON DE LA MODULATION DE FRI~QUENCE
ET DE LA MODULATION DE PHASE EN TELECOMMANDE.
Les proc6d6s de transmission ci-dessus d6crits se classent en deux grands groupes, suivant que la t616commande (prineipalement par voie radio) se fait au moyen de la modulation en fr6quence ou de la modulation en phase.
2,1 Rotations s6culaires.
2,11 Modula t ion de [r~quence. - - Selon le premier proc6d6, la eoordonn6e (toujours suppos6e unique) qui d6finit la position de la pi6ce m6canique est repr6sent6e par une fr6quence. Cette fr6quence est la plupart du temps une basse fr6quence servant h moduler un 6metteur. Les positions extrgmes de la piece m6canique de commande sont repr6sent6es par les valeurs extrgmes que prend la fr6quence dans une bande donn6e. Consid6rons le cas off la pi6ce m6canique de commande et la piece homologue plae6e h l'extr6mit6 r6ceptrice sont des arbres en rotation, la coordonn6e unique est l'angle servant h d6finir la position de chacun de ces arbres. Cet
87 - -
2 / 1 6 .,. LO~n,
angle varie entre 0 o e t 360 ~ La fr6quenee repr6sen- tative de l'angle varie entre F 0 correspondant ~ 0 ~ et F~ correspondant h 360 ~ F 0 est forc6ment diff6- rente de F1, toute la bande F~ ~ F o servant ~ repr6- senter la circonf6rence enti~re. Lorsque l 'arbre a fait un tour complet le syst~me n?est plus en 6tat de t ransmettre un tour suivant effectu6 dans le mgme sens.
La modulation de [rgquence n'est pas une repre- sentation sgculaire.
2,12. Modulation de phase. --- Selon le seeond proc6d6, la coordonn6e est repr6sent6e par le d6pha- sage entre 2 courants sinusoidaux. Ici, la corres- pondance angle-phase est complete, et le syst6me peut t ransmet t re des tours en hombre quelconque effectu6s dans le mgme sens.
La modulation de phase est une reprgsentation's~cu- laire.
2,2. Bande passante et effet des brouUlages.
2,2~. Modulation de [rdquence. - - Les r6sultats connus en modulation t616phonique subsistent dans le cas de la t616commande. Le spectre se calcule de la mgme far : il couvre, pratiquement, toute l'ex- cursion de fr6quence.
Un brouilleur ne provoque d'effet ggnant que s'il pr6sente les caract6ristiques suivantes:
a) sa fr6quence est comprise h l 'int6rieur du spec- ~p t o o
tre de fr6quences de 1 em~ssmn ; b) son amplitude est sup6rieure h celle du signal
utile.
3 . R . D U T H I L , A . J E U D O N [ A N N A I , E S D E S T E L ] ~ C O M M U N I C A T I O N S
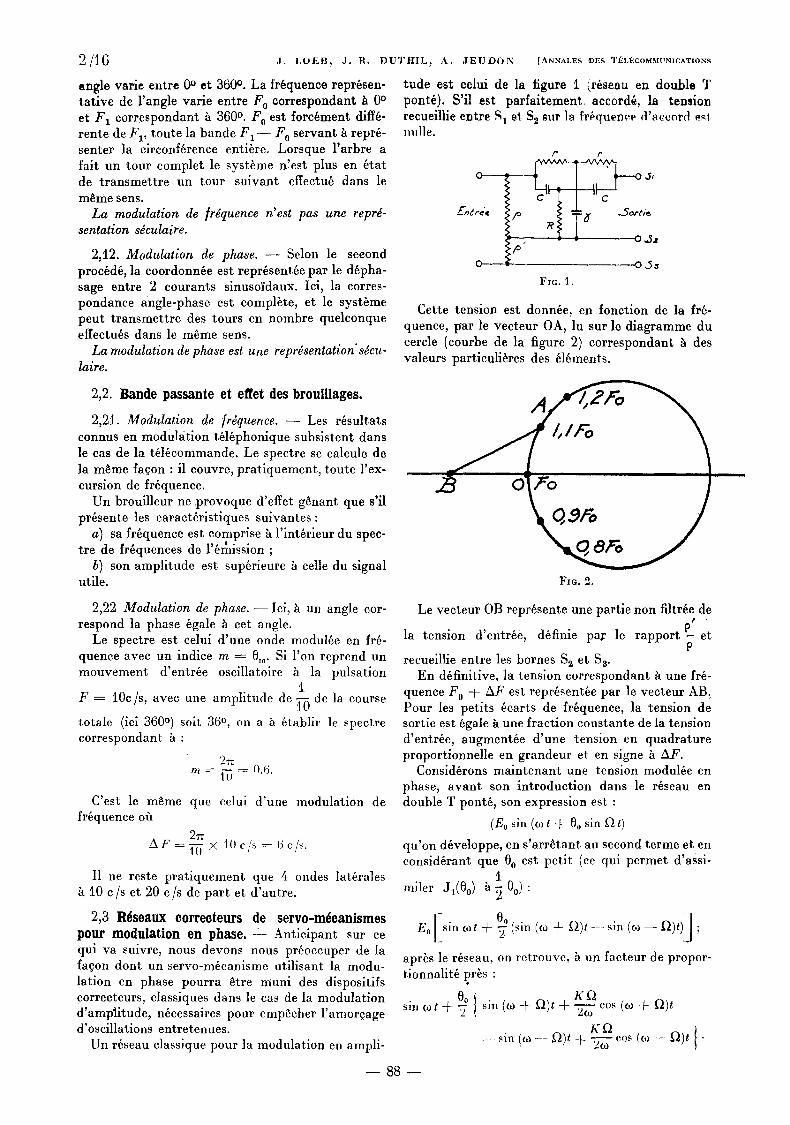
tude est eelui de la figure I (r~seau en double T pont6). 5'il est pa r fa i tement accordS, la temion recueillie entre S l e'r S 2 ~ur ]a fr~quence d'aecord e.~l m,lle.
f ' p
if,tree p ,.5ort,~
~/, - 0~
0 - 0,53
Cette tension est donn6e, en fonctlon de la fr6- quence, p~r le vecteur OA, lu sur le diagramme du cercle (courbe de la figure 2) correspondant h des valeurs particuli~res des 616ments.
~ I G . 2 .
2,22 Modulation de p h a s e . - Ici, h un angle cor- respond la phase 6gale h cet angle.
Le spectre est celui d 'une onde modul6e en fr6- quence avec un indice m ----- 0m. Si l 'on reprend un mouvement d'entr6e oscillatoire h la pulsation
1 F = 10c/s, avec une amplitude de ~ de ta course
totale (ici 360 o) soit 36 o, on a ~ 6tablir le spectre correspondant h :
m = j~ = 0,6.
C'est le m~me que celui d 'une modulation de fr6quence off
2r~ A F = ~ • 10c/s = 6c/s.
I1 ne reste prat iquement que 4 ondes lat6rales t0 c/s et 20 c/s de part et d 'autre.
2,3 Rfiseaux correcteurs de servo-mficanismes pour modulation en phase. - - Anticipant sur ce qui va suivre, nous devons nous pr6occuper de la fa~on dont un servo-m6canisme utilisant la modu- lation en phase pourra ~tre muni des dispositifs correcteurs, classiques dans le cas de la modulation d'amplitude, n6cessaires pour emp~cher l'amorQage d'oscillations entretenues.
Un r6seau classique pour la modulation en ampli-
Le vecteur OB repr6sente une partie non filtr6e de t '
la tension d'entr6e, d6finie pa~ ]e rapport ~ et P
recueillle entre les bornes S 2 et S 3. En d6finitive, la tension correspondant ~ une fr6-
quence F 0 ~- AF est repr6sent6e par le vccteur AB. Pour les petits 6carts de fr6quence, la tension de sortie est 6gale h une fraction constante de la tension d'entr6e, augmcnt6e d 'une tension en quadrature proportionnelle en grandeur et en signe h AF.
Consid6rons maintenant une tension modul6e en phase, avant son introduction dans le r6seau en double T pont6, son expression est :
(Eo sin (601 + 0o sin ~ t)
qu'on d6veloppe, en s 'arrgtant au second terme et en consid6rant que 0 o est petit (ce qui permet d'assi-
l miler Jl(00) h ~ 0o) :
E 0 [ s i n ~ + 0 ~ ~-(sin (r + ~ ) t - -sin ( to-- ~)t) ;
apr~s le r6seau, on retrouve, ~ un facteur de propor- tionnalit6 l~r~s :
~176 l sin cot-~ ~ sin (60 + ~ ) t + K cos (~o + ~:~)t
Sen I . - sin (co - - ~)t -~ 2"-~ cos (o - - ~)t �9
88 - -

t. 4,n ~ 3, 1949] R A D I O ~gYNCHRO-M()T1 , ;U] I
Cherehons a vain si cet te expression peut repr6- senter, aver les mOmr approximations, une tension modul~e en phase, a la m~me pulsation ft. rnai~ avee une autre excursion en phase 0' 0 el u , d(.pha- sage ~ par rappor t "h la tension d'entri.v :
si,, i~t + 0'0 ~i, (f~t + r
Le rapprochement des 2 expressions donne :
K ~ tg ~ -- 2to
0 ' # = 0#( ' l ~ h ~ ~ ' 6 r
Le r6seau donne ainsi un d6phassage @, et une ampli tude 0 0 fonction croissante de fL En diminuant p de la figure ~1, on augmente K h volont6.
On favorise ainsi les hautes fr6quences modula- trices, ainsi qu'il est d'usage pour la modulat ion en amplitude.
2,6. Conclusion: Comparaison entre les 2 sys- t6mes ( 1 ) . _ _ I1 r6sulte de tout eela que, en modu- lation de fr6quence, la largeur de bande h consid6rer rant en ce qui concerne rencombrement de l'dther que l'etTet des brouillages, est la bande de fr6quence totale pouvant 6tre parcourue. Dans des syst~mes existants les largeurs de bande sont soil de quelques centaines de cycles/seconde si l 'on cherche une bande 6troite, soil de plusieurs dizaines de kc/s , si l 'on cherche la 16g~ret6. Les risques de t rouver un brouilleur puis- sant sont d ' au tan t plus grands que la bande passante est large.
Au contraire, la bande passante relative ~ la modu- lat ion en phase a une largeur de 20 c/s en tout .
I1 faut remarquer que dans le proc6d6 h modula- tion de fr6quence, il suttlt d 'une vole par indication h t ransmet t re , alors que dans les proe6d6s h modu- lation de phase il faut disposer d 'une vole par indi- cation, plus une vole commune pour t ransmet l re la phase de r6f6rence.
I Ine faut pas en conclure h~tivement que la modu- lation en phase d o n e gtre utilis6e en toutes circous- tances. I1 faut en particulier discuter la prgcision de la t616commande. Le seuil de sensibilit6 du discri- minateur de phases est un 616ment essentiel du pro- blame, qui dolt ~tre trait6 dans chaque cas parti- culler.
Nous n 'avons pas la pratique de la modulation en fr6quence 6tudi6e dans d 'autres services, mais en ce qui concerne la modulation en phase nous pouvons d'ores et d6jh dire qu'elle permet un scull de sensibi- lit6 de l 'ordre de I ou 2 degr6s, .soit moins qu ,
100 de la circonf6rem'e.
Enfin des consid6rations d 'encombrement et de poids interviennent fr6quemment ; il n 'est pas pos- sible, en tours d 'une 6tude g6n6rale, de savoir avee pr6cision comment la modulation en phase se place h ce point de rue.
1. Le w '2 a bt6 r6dig6 a la su i t e d u n e n t r e t i e n avcc M. L e h m a n n , i ngbu ieu r consei l h I'O. N. E. R. A.
~3. PLAN U1:~ I,'KTt'DI;I.
3,1. Place de l'6tude duns l'ensemble des recherches. - - La Division T616commande faisant patt ie de la section g6n6rale du C. N. E. T. a pour r61e d'effectuer des 6tudes d 'ordre g6n6ral. I1 ne s'agit donc pas de met t re au point un proc6d6, mais d'ex- poser route une classe de procgd~s, et de conduire pour les plus int6ressants d 'entre eux les 6tudes exp6rimentales jusqu'au point off leur effieaeit6 est d6montr6e par les faits.
Comme oil l'a vu au w I, [a modulat ion de fr$- quence a fail I 'objet de nombreux t r av au x qui ont conduit h des r6alisations pratiques.
Au contrair,,, la modulation en phase n'a 6t6 employ6~' vn France que pour un atfichage visuel (C ie des Compteurs) sans qu 'on air cherch6 h y adapter un servo-m6canisme. En cons6quence, nous avons d6cid6 de faire porter sur la 'modula t ion en phase tous les moyens en personnel et en mat6riel affect6s h cette 6tude,
3,2. Plan de l ' ~ t u d e . - Pour r6aliser par radio un asservissement m6canique util isant la phase, il faut met t re au point les 616ments suivants :
3,21. - - Un proc6d6 de transmission sur la mgme vole radio, de 2 courants dont l 'un porte la phase d ' information, et l 'autre la phase de r6f6rence.
3,22. - - A l'6mission, un proc6d6 pe rmet t an t de d6phaser un courant alternatif d 'une quanti t6 6gale h l 'angle h t ransmet t re .
3,23. --- A la r6ception, on dispose de 2 courants (qui peuvent ne pas ~tre h la m~me fr6quence, comme on le verra). Ces courants peuvent :
3,23'1. --- Soil produire, sans l 'appoint d 'une source locale d'6nergie m6canique, le mouvement m6ca- nique de l 'arbre h la r6ception.
3,232. - - Soil actionner un servo-m6canisme empruntan t l '6nergie m6canique h une source locale (moteur asservi). Le sch6ma de principe en est donn6 par.la ti~ure 3.
por~ '~nt
, , l~z~,.,~t,~ Ph~,se de �9 r~]*e~ettee *
F J ~;. 3 .
IJe courant por lan t l ' information traverse un d6phaseur D aetionn6 par un moteur M. Le discrimi- nateur de phases A ((juge , la diff6renee de phases des 2 courants qui lui sont appliqu6s, et al imente le moteuv M dans le sens ('onvenable pour annuler eette
--- 89 ---
J . L O E B ~ J . R. D U T H I L ~ A . J E U D O N [ANNALI~$ DI~S T]~LI~COMMUNICATIOt~S
diff6rence. A c e moment l'arbre du d6phaseur D nccupe la position souhait6e.
Ce discriminateur A est une piece essentielle de l'appareillage. Sa conception d6pend du moteur M utilis6.
~. TRANSMISSION DE LA PHASE DE RI~FERENCE.
On pourrait 6videmment utiliser 2 voles radio- 61ectriques s6par6es dont l'une transmettrait Fin- formation et l 'autre la phase de r6f6rence. Cela serait souvent tr~s incommode, et il y aura en g6n6ral int6- rgt h transmettre les 2 phases au moyen d'une mgme vole radio61ectrique.
4,1. Transmission par transposition des voles.
4 , 1 t . - P r i n c i p e . - La phase contenant 1'infor- mation est transmise directement par la voie radio- 61ectrique.
La phase de r6f6rence module une fr6quence inter- m6diaire qui h son tour est appliqu6e aux homes modulatrices de l'6metteur. A la r6ception, ces deux voles sont s6par6es par des filtres et la fr6quence interm6diaire d6tect6e h son tour redonne la phase de r6f6rence.
Ce proc6d6 donne lieu aux critiques suivantes : il est pratiquement impossible de transmettre 2 cou- rants de basse fr6quence sur la mgme onde sans qu'il y ait diaphonie. I1 en r6sulte que, dans le cir- cuit qui devrait ne contenir que la phase d'informa- tion, la phase de r6f6rence agit indfiment. Si par exemple ces deux tensions sont d6phas6es de 90 ~ la tension parasite affecte la tension utile d'une erreur de phase qui se mesure approximativement par le rapport des 2 tensions. Ainsi, une diaphonie de 40 db introduirait une erreur de 1/2 degr6 environ.
Comme la t616commande dolt pouvoir ~tre effec- tu6e au moyen du mat6riel le plus simple possible, il faudra 6viter des suj6tions de ce genre.
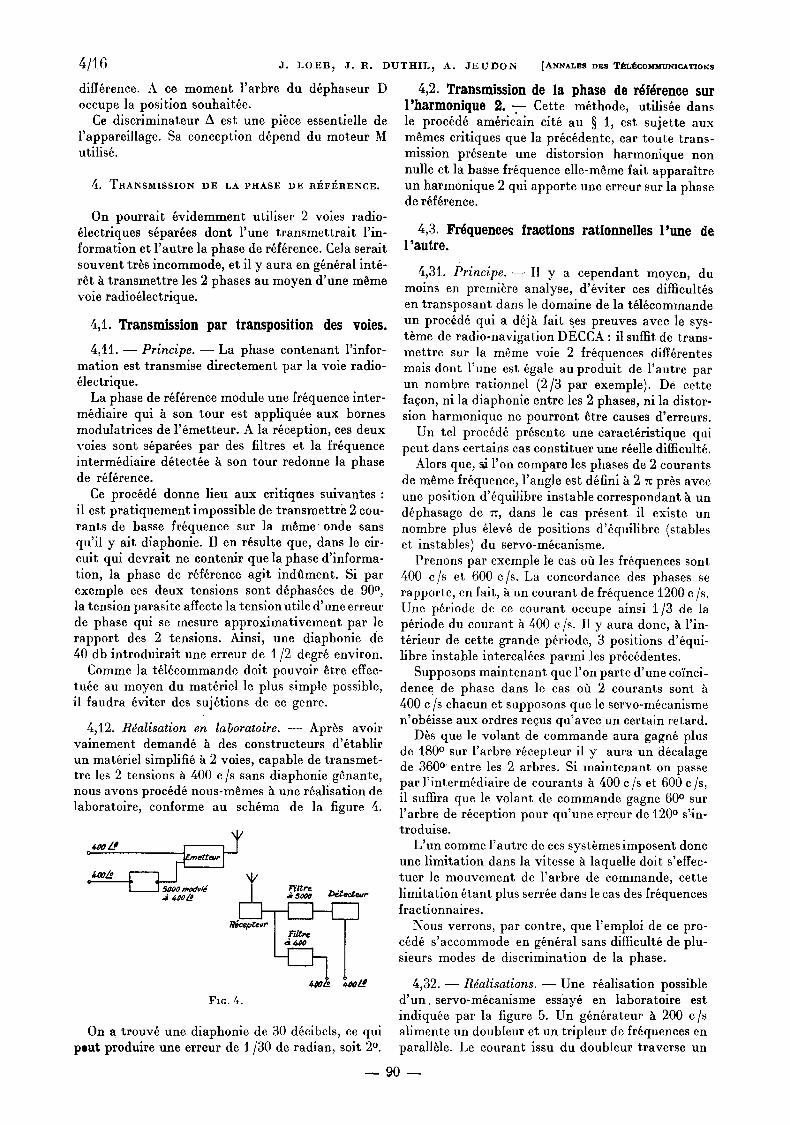
4,12. R ~ a l i s a t i o n en la~ora to i re . - - Apr~s avoir vainement demand6 h des constructeurs d'6tablir un mat6riel simplifi6 h 2 voles, capable de transmet- tre les 2 tensions h 400 c/s sans diaphonie ggnante, nous avons proc6d6 nous-mgmes h une r6ali'sation de laboratoire, conforme au sch6ma de la figure 4.
: [ ~ ~ Z e l ,~ ~ ~ . t ~ t ~ r
FIG. ~.
On a trouv6 une diaphonie de 30 d6cibels, ce qui ptut produire une erreur de 1/30 de radian, soit 2 o.
4,2. Transmission de la phase de rfiffirence sur l'harmonique 2 . - Cette m6thode, utilis6e dans le proc6d6 am6ricain cit6 au w 1, est sujette aux m~mes critiques que la pr6c6dente, car route trans- mission pr6sente une distorsion harmonique non nulle et la basse fr6quence elle-mgme fair apparMtre un harmonique 2 qui apporte une erreur sur la phase de r6f6rence.
4,3. Fr~quences fractions rationnelles l'une de l'autre.
4,31. P r i n c i p e . - I1 y a cependant moyen, du moins en premiere analyse, d'6viter ces difficult6s en transposant dans le domaine de la t616commande un proc6d6 qui a d6jb fair ses preuves avec le sys- t~me de radio-navigation DECCA : il suffit de trans- mettre sur la mgme vole 2 fr6quences diff6rentes mais dont l'une est 6gale au produit de l'autre par un nombre rationnel (2/3 par exemple). De cette fa~on, ni la diaphonie entre les 2 phases, ni la distor- sion harmonique ne pourront gtre causes d'erreurs.
Un tel proc6d6 pr6sente une caract6ristique qui peut darts certains cas constituer une r6elle difficult6.
Alors que, ai l'on compare les phases de 2 courants de m~me fr6quence, l'angle est d6fini h 2 7: pros avec une position d'6quilibre instable correspondant h u n d6phasage de r:, dans le cas pr6sent il existe un hombre plus 61ev6 de positions d'6quilibre (stables et instables) du servo-m6canisme.
Prenons par exemple le cas off les fr6quences sont 400 c/s et 600 c/s. La concordance des phases se rapporte, en fair, h un courant de fr6quence 1200 c/s. Une p6riode de ce courant occupe ainsi 1/3 de la p6riode du courant h 400 c/s. I1 y aura donc, h Fin- t6rieur de cette grande p6riode, 3 positions d'6qui- libre instable intercal6es parmi les pr6c6dentes.
Supposons maintenant que l'on parte d'une coinci- dence de phase dans le cas ofi 2 courants sont ~I 400 c/s chacun et supposons que le servo-m6canisme n'ob6isse aux ordres re~us qu'avec un certain retard.
D~s que le volant de commande aura gagn6 plus de 180 ~ sur l'arbre r6cepteur il y aura un d6calage de 360 ~ entre les 2 arbres. Si maintenant on passe par l'interm6diaire de courants h 400 c/s et 600 c/s, il suffira que le volant de commande gagne 60 ~ sur l'arbre de r6ception pour qu'une erreur de 120 ~ s'in- troduise.
L'un comme l'autre de ces syst~mes imposent donc une limitation darts la vitesse ~ laquelle dolt s'effec- tuer le mouvement de l'arbre de commande, cette limitation 6taut plus serr6e dans le cas des fr6quences fractionnaires.
Nous verrons, par contre, que l'emploi de ce pro- c6d6 s'accommode en g6n6ral sans difficult6 de plu- sieurs modes de discrimination de la phase.
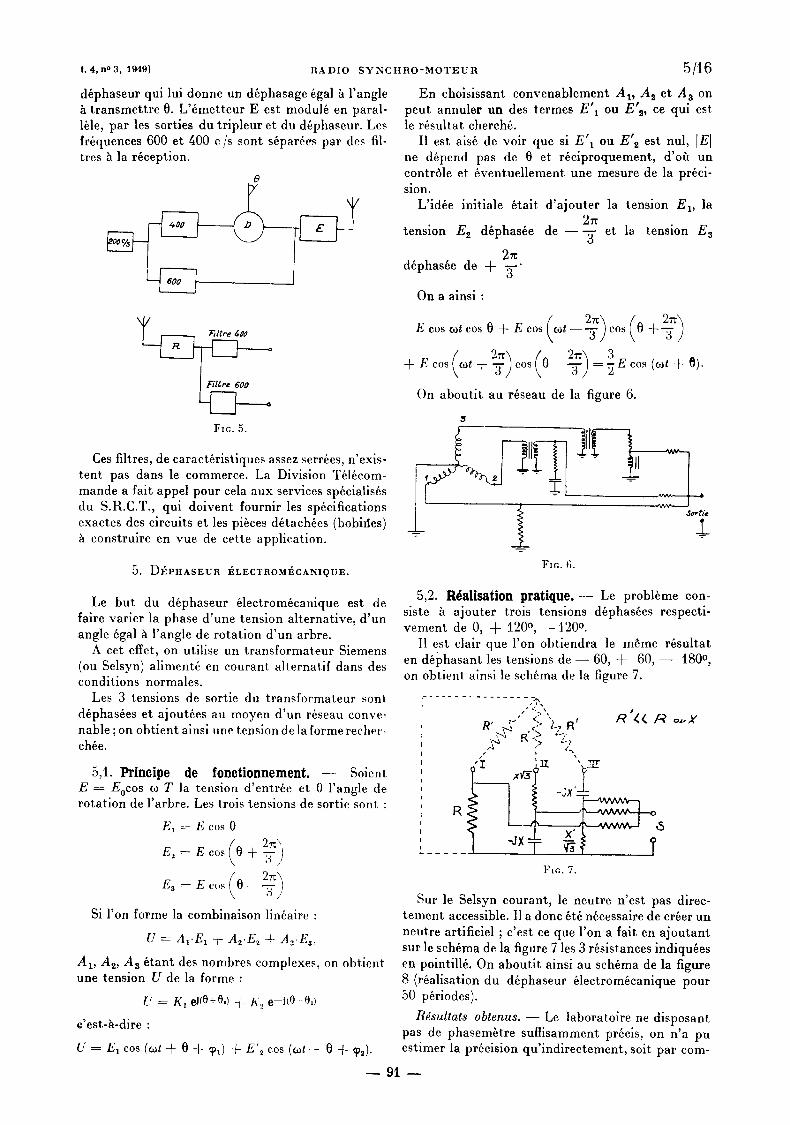
4,32. - - R ~ a l i s a t i o n s . - - Une r6alisation possible d'un. servo-m6canisme essay6 en laboratoire est indiqu6e par la figure 5. Un g6n6rateur h 200 c/s alimente un doubleur et un tripleur de fr6quences en parall~le. Le courant issu du doubleur traverse un
- - 90 - -
t. 4, n ~ 3, 1949]
d6phaseur qui lui donne un d6phasage 6gal h l 'angle t ransmettre 0. L'6metteur E est modul6 en paral-
l~le, par les sorties du tripleur et du d6phaseur. Les fr6quences 600 et 400 c/s sont s6par6es par des fil- t r e sh la r6ception.
~9
0 a
Fro. 5.
Ces filtres, de caract6ristiques assez serr6es, n'exis- tent pas dans le commerce. La Division T616com- mande a fait appel pour cela aux services sp6cialis6s du S.R.C.T., qui doivent fournir les sp6cifications exactes des circuits et les pi~ces d6tach6es (bobifles) h construire en vue de cette application.
R A D I O S Y N C H R O ' M O T E U R 5/16 En choisissant convenablement A 1, A 2 et A a on
peut annulet un des termes E ' 1 ou E ' 2, ce qui est le r6sultat cherch6.
Il est ais6 de voir que si E ' 1 ou E'2 est nul, [E] ne d6pend pas de 0 et r$ciproquement, d'ofi un contrSle et 6ventuellement une mesure de la pr6ci- sion.
L'id6e initiale 6tait d 'ajouter la tension El, la 2~
tension E2 d6phas6e d e - - ~ - et la tension E a
27: d6phas6e de + T "
On a ainsi :
E cos cot cos 0 + E cos (cot - - 2.---~) cos (0 +2 .~]
2= + E cos (cot + -~--) cos (0 2 . ~ ) 3 = 7 E cos (cot + 0).
On abouti t au r6seau de la figure 6.
3
L - - .-!-
5. D ~ V H A S E U ~ I~LECTROMECANIQUE.
Le but du d6phaseur 61ectrom6canique est de faire varier la phase d'une tension alternative, d 'un angle 6gal h l 'angle de rotation d 'un arbre.
A cet effet, on utilise un t ransformateur Siemens (ou Selsyn) aliment6 en courant ahernafif dans des conditions normales.
Les 3 tensions de sortie du t ransformateur sont d6phas6es et ajout6es au moyen d 'un r6seau conve- nable ; on obtient ainsi une tension de la forme recher- ch6e.
5,1. Princ ipe de f o n c t i o n n e m e n t . - Soient E = E0cos co T la tension d'entr6e et 0 l 'angle de rotation de l'arbre. Les trois tensions de sortie sont :
El =- E cos 0 2~\,
E2---Ecos 0 + 7 )
3/
Si l'on forme la combinaison lin6aire :
U = AvE1 + A2.E., + Aa.E 3,
A1, A2, A s &ant des nombres complexes, on obtient une tension U de la forme :
U = K, eJ(O+O.) + K o e--J( 0 4-0,)
e'est-h-dire :
U = E, cos (cot + 0 + ~ ) + E'~ cos (cot--- 0 + ~) .
Fro. 6.
5,2. Rfial isat ion p r a t i q u e . - Le probl6me con- siste h ajouter trois tensions d6phas6es respecti- vement de 0, + 1 2 0 % - 120 o.
I1 est clair que l'on obtiendra le mgme r6sultat en d6i~hasant les tensions de - - 60, + 60, - - t80 o, on obtient ainsi le sch6ma de la figure 7.
" ~. ", , R K/, ,/'# o~.X R' ,..~ c" ,- ,R ' "?~ tY.-.
~-..k
. . . . . - xT T FiG. 7.
Sur le Selsyn courant, le neutre n'est pas direc- tement accessible. II a donc 6t6 n6cessaire de cr6er un neutre artificiel ; c'est ce que l'on a fait en a joutant sur le sch6ma de la figure 7 les 3 r6sistances indiqu6es en pointiil6. On abouti t ainsi au sch6ma de la figure 8 (r6alisation du d6phaseur ~lectrom6canique pour 50 p6riodes).
B~sultats obtenus. - - Le laboratoire ne disposant pas de phasem&re sugisamment pr6cis, on n'a pu estimer la pr6cision qu'indirectement, soit par corn-
- - 91 - -
B / J ( ; J . L O E B , J . 1R.
paraison ave~ d~s r~eaux d6phasem, r6sistance eapaeit6, soit par comparaison de 2 d6phaseurs entre eux, soit enfin, en mesurant la variation de la ten- sion de sortie. Tous les r6suhats sur 50 p6riodes sere-
E r..~# e~tre P/~,se et Neub'e
_ o, o92/J ~" , t#~
l:lc. 8.
blent indiquer que, si l'on utilise le transformateur que l'on peut trouver dans l'industrie, l'erreur (diff6- rence entre la phase r6alis6e obtenue et l'angle 0) ne d6passe pas quelques degr6s.
Lorsqu'on a voulu employer le m~me dispositif sur 400 p6riodes les r6sultats ont 6t6 moins bons.
Une premiere cause d'erreur a sembl6 due h un d6faut d'6quilibrage du neutre artificiel. On s'affran- chira de cette erreur en 6quilibrant les 3 i~np6dances sur lesquelles d6bitent les 3 sorties de Selsyn.
Des consid6rations de facilit6 de construction ont fair pr6f6rer h une modification du sch6ma de !a figure 8, le sch6ma (fig. 9) qui indique la r6alisation pratique employ6e actuellement.
tXl
•
Z
10.000 4O.OO0
FIG. 9.
La pr6cision obtenue semble meilleure que celle obtenue avec le montage pr6c6dent.
5,3. Variantes. - - I1 est clair que tout dispo- sitif fournissant des tensions variant d'une mani~re sinusoidale en fonction de l'angle de rotation peut gtre utilis6 pour remplacer le Selsyn. En particulier, on construit, du moins en Am6rique, des potentio- m~tres dont la tension de sortie varie suivant le sinus ou le cosinus de l'angle de rotation.
A d6faut de cet appareil d'une construction sp6- ciale, on a exp6riment6 le dispositif suivant qui per- met de r6aliser avec une bonne approximation la loi sinusoidale de variation de r6sistance.
D U T H I L ~ A. J E U D O N [ANNALES Dt:S T~L~COMMUNICATIONS
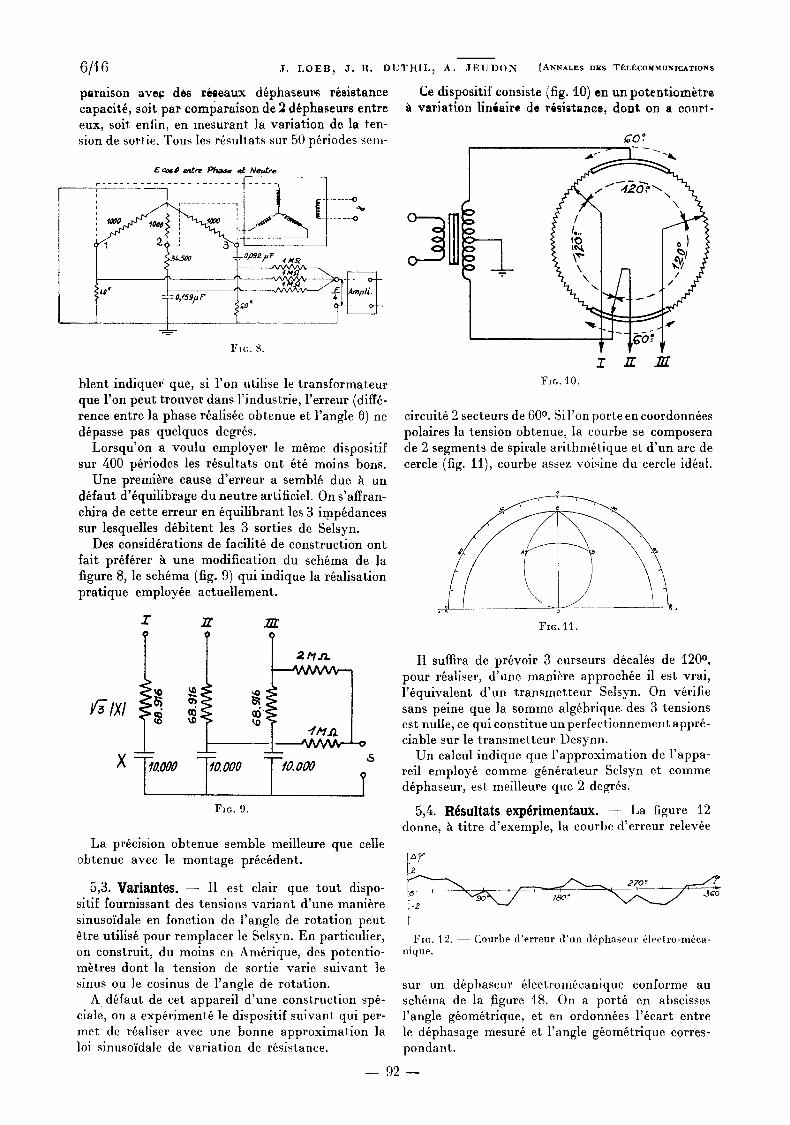
Ce dispositif consiste (fig. i0) en un potentiom~tre variation lin6air,, dt r6si~tance, dont on a court-
O
G
I~> It,,
FIG. 10.
GO.-"
"pTo. " I 2Z ~Z
circuit6 2 secteurs de 60 ~ Si l'on porte en coordonn6es polaires la tension obtenue, la courbe se composera de 2 segments de spirale arithm6tique et d'un arc de cercle (fig. i l) , courbe assez voisine du cercle id6al.
o
FzG. t t .
I1 suffira de pr6voir 3 curseurs d6cal6s de 120 ~ pour r6aliser, d'une manibre approch6e il est vrai, l'6quivalent d'un transmetteur Selsyn. On v6rifie sans peine que la somme alg6brique des 3 tensions est nulle, ce qui constitue un perfectionnement appr6- ciable sur le transmetteur Desynn.
Un calcul indique que l'approximation;de l'appa- reil employ6 comme g6n6rateur Selsyn et comme d6phaseur, est meilleure que 2 degr6s.
5,4. R6sultats exp~rimentaux. - - La figure 12 donne, h titre d'exemple, la courbe d'erreur relev6e
Fro . 12. - - C o u r b e d ' e r r e u r d ' u n d 6 p h a s e u r 6 l ec t ro -m6ca - ,f ique.
sur un d6phaseur 61ectrom6canique conforme au sch6ma de la figure 18. On a port6 en abscisses l'angle g6om6trique, et en ordonn6es l'6cart entre le d6phasage mesur6 et l'angle g6om6trique corres- pondant.
- - 9 2

t. 4, nO 3, 1949]
6. RI~CEPTION DIRECTE.
R A D I O S Y N C H R O - M O T E U R
I1 s~agit de mettre en 6vidence, sur un appareil indicateur, un angle g6om6trique 6gal au d6phasage des 2 courants r%us.
6,1. Courants de la mfime fr6quenoe.
6,11. P h a s e m ~ t r e it c h a m p t o u r n a n t . - - La phase de r6f6rence fournit au stator d'une machine tour- nante des eourants triphas6s qui produisent un champ tournant (fig. 13).
co. :
Fic~.13.
La phase contenant l ' information (d6cal6e de l'angle 0 par rapport h l'origine des phases) est appliqu6e h une bobine plac6e dans le champ tour- nant. Le couple total est :
Co cos (ot cos (w + 0) ~i, 0'
-}- C O cos (\cot + - ~ - / c o s (cot-}, O) sin( O' ~
+ Co cos cot + -~-/('~,,s (~ot + O) ~in O' + '
dont la valeur moyenne est proportionnelle "h sin (0 + 0').
I1 s 'annule pour 0 + 0' = 0 ou =. Une seule de ces positions dkquil ibre est 'stable. Un premier essai (fig. 14) a 6% fait d 'un Selsyn,
seul appareil tournant muni d'u~.~ rotor monophas6
l".;. 16.
alors existant h notre laboratoire. Le r6sultat recher- ch6 a 6t6 masqu6 par une rotation spontan6e du rotor dans le champ. Le rotor tournai t alors sous l'effet de Faction du champ sur son noyau magn6- t ique (moteur h r61uctance variable).
Une r6alisation meilleure est escompt6e grace h la
7/16 construction, par l ' industrie priv6e, d 'un appareil dans lequel les pi~ces polaires seront profil6es de fa~on h 6viter 1'(( effet de cornes ~) (fig. 15). On y par-
Fro. 15.
vient en 6panouissant les pi~ces polaires au maxi- nlUIl l .
La seule cause pr6visible de mauvais fonctionne- ment pouvalt gtre un effetr cage d'6eureuil ,), sen- sible ma|gr6 le feuilletage du rotor. Un ing6nieur aUemand, le Dr BoncnERs, a6 t6 invit6, par l 'inter- m6diaire de la D616gation Frangaise de Berlin, a cal- culer l 'effet r6siduel. Son rapport conclut h la tr~s faible valeur du eouple r6siduel, petit devant les frot tements des paliers.
6,[2. P h a s e m k t r e ~lectronique. - - Le phasem~tre 61eetronique permet d'aflicher la diff6renee de phase entre deux tensions sinusoidales de m~me fr6quence.
Cet appareil est bas6 sur ' le principe suivant : si on alimente la plaque d 'une pentode au moyen de l 'une des tensions et si l 'on applique sur la grilIe de cette pentode l 'autre tension, la composante con- tinue du courant est de la forme :
I0 + 1 cos %
6tant le d6phasage entre les deux tensions. .Le phasemgtre 61ectronique comportera : 1 ~ un tr iphaseur ayant pour bu t de transformer
en tension triphas6e l 'une des tensions ; 2 ~ trois pentodes aliment6es en tension plaque par
la tension triphas6e et en tension grille par la ten- sion dont on veut mesurer la phase ; apr~s filtrage les courants de sortie de ces pentodes seront de la forme
I0 + I cos ~,
10 + I cos ( ~ p - - - ~ ) '
1o + / cos(~ + 2~) "
I1 sultit d 'envoyer ces 3 courants dans 3 bobines d6cal6es de 120 ~ pour cr6er un champ dont la direc- tion fait avec l'origine un angle 6gal au d6phasage.
Des essais ont montr6 que l 'on pouvai t a t tendre de ce proc6d6 une pr6cision de l 'ordre du degr6.
Les essais n 'ont pas 6t6 poursuivis parce que les seuls r6cepteurs dont disposait le Laboratoire (r6cep- teurs ordinaires de Selsyn) gtaient rnal adapt6s (effet de come notable).
- - 93
8 / 1 6 J. :LOEB, J. ~.
On sait que la Marine avait 6tudi6 et mis au point des r6cepteurs convenables.
La figure i6 indique le relev6 des erreurs, obtenu de la fagon suivante destin6e h 61uder l'effet de
t V o t , ' ' ~ 2 7 ' ~ 1 7 6 �9
B-
Fro. 1_ 6. - - Courbe d ' e r r eu r d ' u n phasem~t re 61ectronique.
come). On mesure les courants dans les pentodes, on les multiplie par 2 et ces courants sont envoy6s dans les enroulements d'un Setsyn dont le rotor est aliment6 en eontinu.
6,2. Cas des [r6quences c o m m e n s u r a b l e s . - I1 pouvait i~tre tentant de chercher h rGaliser un appareil h champ tournant analogue h celui de la figure 14, dans lequel on ferait r6agir l'un sur l 'autre 2 champs tournant h la mgme vitesse, mais cr66s par des fr6quences F z et F 2 commensurables entre elles. On aurait cr66 ces deux champs au moyen de bobinages ayant des nombres de pSles diff6rents. Sous cette forme l'appareil est irr6alisable, car les circuits magn6tiques ne se fermeraient pas correc- tement. I1 faut alors'introduire, en s6rie avec un des courants, un appareil qui reconstitue la fr6quence F~ h partir de la fr6quence Fz, ou comparer les phases sur une fr6quence F 6gale an plus petit com- mun multiple de F1 et F 2.
7. SERVO-ME'CANISME.
D~s que l'on a besoin, h l'endroit de la r6ception, d'une certaine puissance, pour faire mouvoir des pi~ces m6caniques pesantes au lieu de simples dis- positifs d'affichage, il devient n6cessaire de disposer un servo-m6canisme. Les 616ments de ee servo-m6ca- nisme sont les suivants :
a) Un moteur qui fait tourner un d6phaseur 61ectro- in6canique de telle fagon que la phase du courant
la sortie coincide avec la phase de r6f6rence trans- mise par l'autre vole radio. Ces 2 phases sont compa- r6es au moyen d'un discriminateur de phase qui produit un signal utilis6 pour faire tourner le moteur dans un sens ou dans l 'autre suivant que la phase qui porte l'information, une lois d6cal6e par le d6pha- seur 61ectrom6canique, est en avance ou en retard par rapport h la phase de r6f6rence.
b) Le d6phaseur utilis6 h d6jh 6t6d6crit au w 5 ; il reste donc ~ examiner les diverses possibilit6s qui s'ouvrent pour la discrimination de phase.
8. DISCRIMINATEURS DE PHASE CONTINUE.
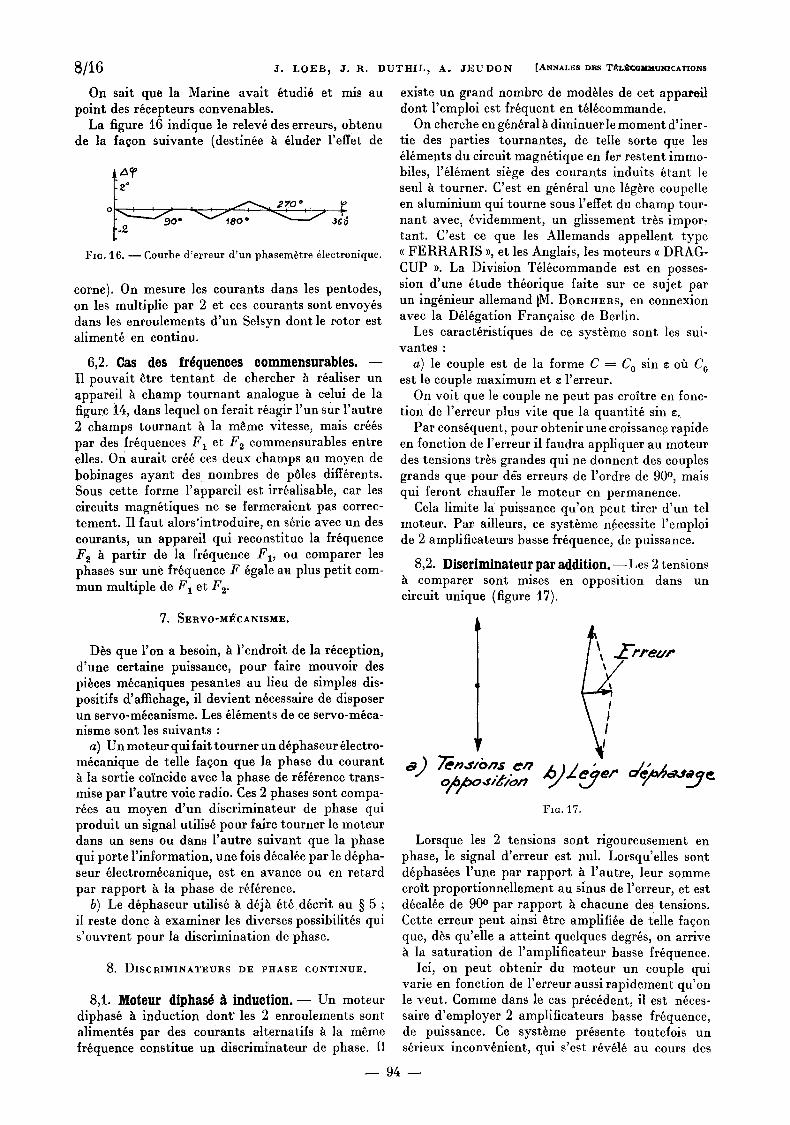
8,1. Moteur diphas6 ~ i n d u c t i o n . - Un moteur diphas6 h induction dont" les 2 enroulements sont aliment6s par des courants atternatifs h la m~me fr6quence constitue un discrimlnateur de phase. I1
D U T H I L , k . J E U D O N [ANNALES DES TfCL~COMM, UNICATIONS
existe un grand nombre de modules de cet appareil dont l'emploi est fr6quent en t616commande.
On cherche en g6n6ral ~ diminuer le moment d'iner- tie des parties tournantes, de telle sorte que les 616ments du circuit magn6tique en fer restent immo- biles, l'616ment si~ge des courants induits 6rant le seul h tourner. C'est en g6n6ral une 16g~re coupelle en aluminium qui tourne sous l'effet du champ tour- nant avec, 6videmment, un glissement tr~s impor- tant. C'est ce que les Allemands appellent type (( FERRARIS ~), et les Anglais, les moteurs (( DRAG- CUP )). La Division T6i6commande est en posses- sion d'une 6tude th6orique faite sur ce sujet par un ing6nieur allemand IM. BOnCHE~S, en connexion avec la D61~gation Fran~aise de Berlin.
Les caract6ristiques de ce systbme sont les sui- vantes :
a) le couple est de la forme C = C O sin r off C~ est le couple maximum et r l'erreur.
On volt que le couple ne peut pas crottre en fonc- tion de l'erreur plus ri te que la quantit6 sin r
Par cons6quent, pour obtenir une croissance rapide en fonction de l'erreur il faudra appliquer au moteur des tensions tr~s grandes qui ne donnent des couples grands qu.e pour d6s erreurs de l'ordre de 90 o, mais qui feront chauffer le moteur en permanence.
Cela limite la puissance qu'on peut tirer d'un tel moteur. Par ailleurs, ce syst~me n6cessite l'emploi de 2 amplificateurs basse fr6quence, de puissance.
8,2. Discriminateur par addi t ion . - - Les 2 tensions comparer sont raises en opposition dans un
circuit unique (figure 17).
• ~'PPeUP
ola/ .ic, n FIG. 17.
Lorsque les 2 tensions sont rigoureusement en phase, le signal d'erreur est nul. Lorsqu'elles sont d6phas6es l'une par rapport h l'autre, leur somme crolt proportionnellement au sinus de l'erreur, et est d6cal6e de 90 ~ par rapport h chacune des tensions. Cette erreur peut ainsi gtre amplifi6e de telle fa~on que, d~s qu'elle a atteint quelques degr6s, on arrive
la saturation de l'amplificateur basse fr6quence. Ici, on peut obtenir du moteur un couple qui
varie en fonction de l'erreur aussi rapidement qu'on le veut. Comme dans le cas pr6c6dent, il est n6ces- saire d'employer 2 amplificateurs basse fr6quence, de puissance. Ce syst~me pr6sente toutefois un s6rieux inconv6nient, qui s'est r6v616 au cours des
- - 94 - -
t. 4, n ~ 3, 1949] I ~ A D I O
essais : pour que le syst~me fonctionne, il faut que les 2 tensions oppos6es soient rigoureusement 6gales. S'il n 'en est pas ainsi, il existe, m~me dans le cas off les tensions sont en phase, un signal d'erreur non nul. Ce dernier est, il est vrai, d@al6 de 90 ~ par rapport au v6ritable signal d'erreur et on peut ainsi se servir de cette circonstance pour en 61iminer les effets. Toutefois cette tension r6siduelle s'est r6v616e au cours des essais extrgmement g~nante : en effet si l 'on r~gle l 'amplification de telle fa~on que l'ampli- fieateur soit satur6 pour une erreur angulaire petite (courant utilis6) il le sera aussi d6s que la diff6rence entre les amplitudes des 2 tensions (courant parasite) sera du m~me ordre que leur diff6rence vectorielle. On at teint ainsi tr6s rapidement la saturation des amplificateurs, et le syst~me s'est r6v616 aux essais extrgmement instable.
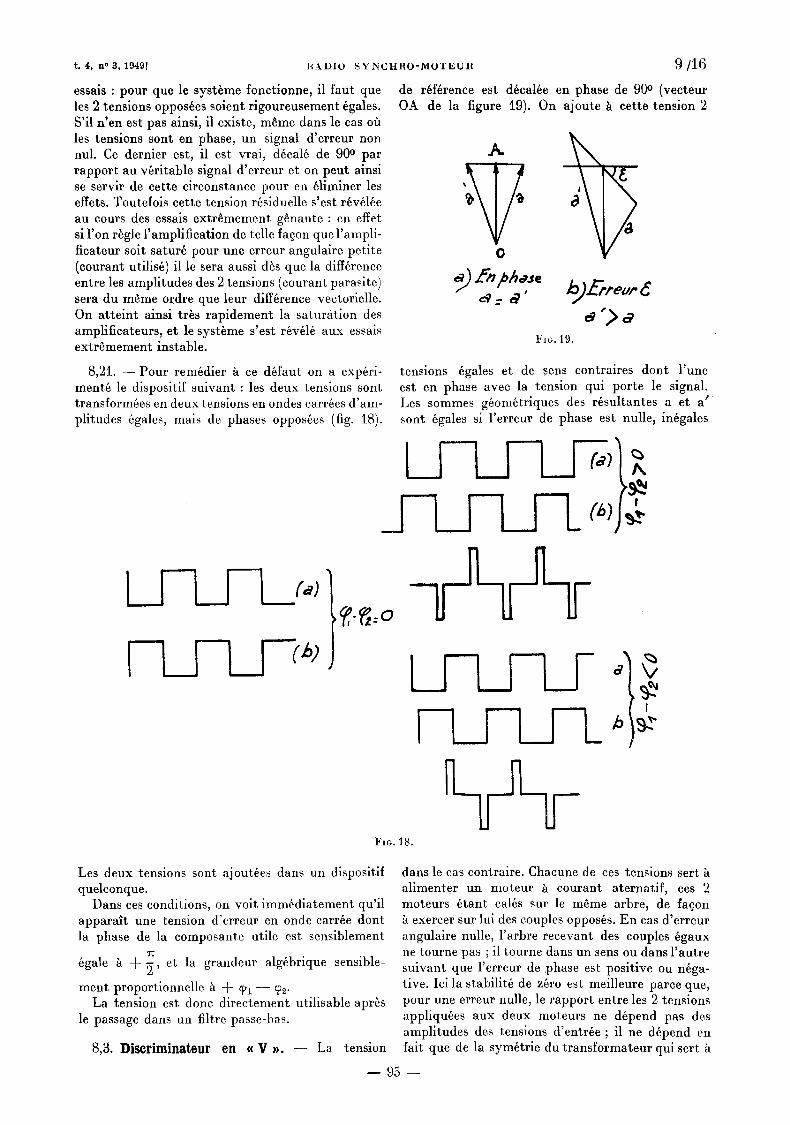
8 , 2 1 . - Pour rem6dier h ce d6faut on a exp6ri- ment6 le dispositif suivant : les deux tensions sont transform6es en deux tensions en ondes carr6es d'am- plitudes 6gales, mais de phases oppos6es (fig. 18).
SY:NC HRO-MOTEUR 9 /16
de r6f6rence est d6cat6e en phase de 90 ~ (vecteur OA de la figure t9). On ajoute h cette tension 2
I-I
J
FIG. t 8 .
0
: a ' 6
a a
FIG. 19.
tensions 6gales et de ~ens contraires dont l 'une est en phase avec la tension qui porte le signal. Les sommes g6om6triques des r6sultantes a e t a ' sont 6gales si l 'erreur de phase est nulle, in6gales
i1111 I I ! ILc ,
--lj ,n UIIF
q~ /X
!
II I
I I I F
u U-
I
Les deux tensions sont ajout6es dans un dispositif quelconque.
Dans ces conditions, on volt imm6diatement qu'il apparalt une tension d'erreur en onde carr6e dont la phase de la composante utile est sensiblement
6gale h -~ 2 ' et la grandeur alg6brique sensible-
ment proportionnelle "~ + ~l - - ~2. La tension est done directement utilisable apr~s
le passage dans un fihre passe-bas.
8,3. D i s c r i m i n a t e u r e n ,, V , . - - La tension
dans le cas contraire. Chacune de ces tensions sert h alimenter un moteur h courant aternatif , ces 2 moteurs 6rant cal6s sur le m~me arbre, de fa~on �9 ~ exercer sur lui des couples oppos6s. En cas d'erreur angulaire nulle, l 'arbre recevant des couples 6gaux ne tourne pas ; il tourne dans un sens ou dans l 'autre suivant que l 'erreur de .phase est positive ou n6ga- tire. Ici la stabilit6 de z6ro est meilleure parce que, pour une erreur nulle, le rapport entre les 2 tensions appliqu6es aux deux moteurs ne d6pend pas des amplitudes des tensions d'entr6e ; il ne d6pend en fait que de la sym6trie du t ransformateur qui sert "~
- - 9 5 - -
v
o21
10/~-6 J. LOEB, a. R. DU
produire les 2 tensions oppos6es en quadrature avec la tension de r6f6rence. Aux essais, la stabilit6 s'est r6v616e bonne, mais le couple exerc6 6tait faible paree que le laboratoire ne disposait h ce moment que de petits moteurs LIP h p61es fendus. Si l 'on cherche
avoir un couple plus grand, on rencontre le ingme inconv6nient que dans le dispositif 8,1, h savoir la n6cessit6 de 2 amplificateurs basse fr6quence, de puissance.
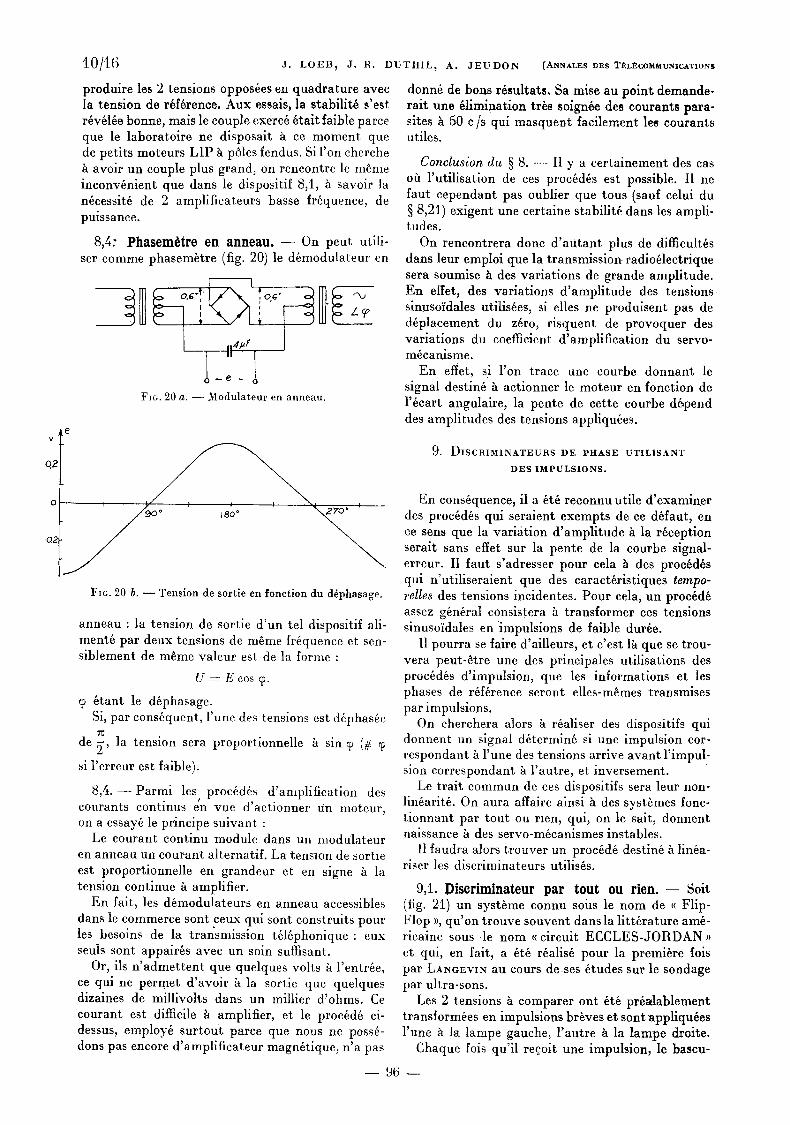
8,4: Phasem6tre en anneau . - - On peut utili- ser comme phasem6tre (fig. 20) le d6modulateur en
F~G. 20 a. - - Modulateur en anneau.
e
~ ~ 18o ~ ~
F,c. 20 b. - - Tension de sortie en fonction du d6phasage.
anneau : la tension de sortie d 'un tel dispositif ali- ment6 par deux tensions de mgme fr6quence et sen- siblement de m~me valeur est de la forme :
U = E cos <p,
6tant le d6phasage. Si, par cons6quent, l 'une des tensions est d6phas6e r:
de ~, la tension sera proportionnelle h sin 9 (#
si l 'erreur est faible).
8 , 4 . - Parmi les proc6d6s d'ampliticatio,l des courants continus en rue d'actionner Un ,noteur, on a essay6 le principe suivant :
Le courant continu module dans un modulateur en anneau un courant alternatif. La tension de sortie est proportionnelle en grandeur et en signe h la tension continue h amplifier.
En fait, les d6modulateurs en anneau accessibles darts le commerce sont ceux qui sont construits pour les besoins de la transmission t616phonique : eux seuls sont appair6s avec un soin suftlsant.
Or, ils n ' admet ten t que quelques volts ~ l'entr6e, ce qui ne permet d'avoir h la sortie que quelques dizaines de millivolts dans un millier d'ohms. Ce courant est difllcile h amplifier, et le proc6d6 ci- dessus, employ6 surtout parce que nous ne poss6- dons pas encore d'amplificateur magn6tique, n'a pas
THIL: A. JEU DON [ANNALES DES T~L~-COMMUNICATION$
donn6 de boris r6~ultats. Sa raise au point demande- rait une 61imination tr~s soign6e des eourants para- sites h 50 c/s qui masquent facilement l~s courants utiles.
Conclusion du w 8. - - I1 y a certainement des cas off l 'utilisation de ces proc6d6s est possible. I1 ne faut cependant pas oublier que tous (saul celui du w 8,21) exigent une certaine stabilit6 dans les ampli- tudes.
On rencontrera donc d ' au tan t plus de difflcuh6s dans leur emploi que la transmission radio61ectrique sera soumise h des variations de grande amplitude. En effet, des variations d 'ampli tude des tensions sinusoidales utilis6es, si elles ne produisent pas de d6placement du z6ro, risquent de provoquer des variations du coettlcient d'amplification du servo- m6canisine.
En effet, si l 'on trace une courbe donnant le signal destin6 h actionner le moteur en fonction de l'6cart angulaire, la pente de cette courbe d6pend des amplitudes des tensions appliqu6es.
9. DISCRIMINkTEURS DE PHASE UTILISANT
DES IMPULSIONS.
En cons6quence, il a 6t6 reconnu utile d 'examiner des proc6d6s qui seraient exempts de ce d6faut, en ce sens que la variation d 'ampli tude h la r6ception serait sans effet sur la pente de la courbe signal- erreur. II faut s'adresser pour cela h des proc6d6s qui n'utiliseraient que des caract6ristiques tempo- relles des tensions incidentes. Pour cela, un proc6d6 assez g6n6ral consistera ~ transformer ces tensions sinusoidales en 'impulsions de faible dur6e.
I1 pourra se faire d'ailleurs, et c'est lh que se trou- vera peut-~tre une des principales utilisations des proc6d6s d'impulsion, que les informations et les phases de r6f6rence seront elles-m~mes transmises par impulsions.
On cherchera alors h r6aliser des dispositifs qui donnent un signal d6termin6 si une impulsion cor- respondant h l 'une des tensions arrive avant l'impul- sion correspondant h l 'autre, et inversement.
Le trai t commun de ces dispositifs sera leur non- lin6arit6. On aura affaire ainsi h des syst6mes fonc- t ionnant par tout ou rlen, qui, on le salt, donnent naissance h des servo-m6canismes instables.
I1 faudra alors t rouver un proc6d6 destin6 ~ lin6a- riser les discriminateurs utilis6s.
9,1. Discr iminateur par tout ou rien. - - Soit (fig. 2i) un syst6me connu soils le nom de (( Flip- Flop )), qu'on trouve souvent dans la l i t t6rature am6- ricalne sous le nora ((circuit ECCLES-JORDAN ,) et qui, en fair, a 6t6 r6alis6 pour la premi6re fois par LA~GEVIN au cours de.ses 6tudes sur le sondage par ultra-sons.
Les 2 tensions h comparer ont 6t6 pr6alablement transform6es en impulsions br6ves et sont appliqu6es l 'une ~ la lampe gauche, l 'autre ~ la lampe droite.
Chaque lois qu'il ref.oit une impulsion, le bascu-
- - 96 u
t. 4, n ~ 3, 1949]
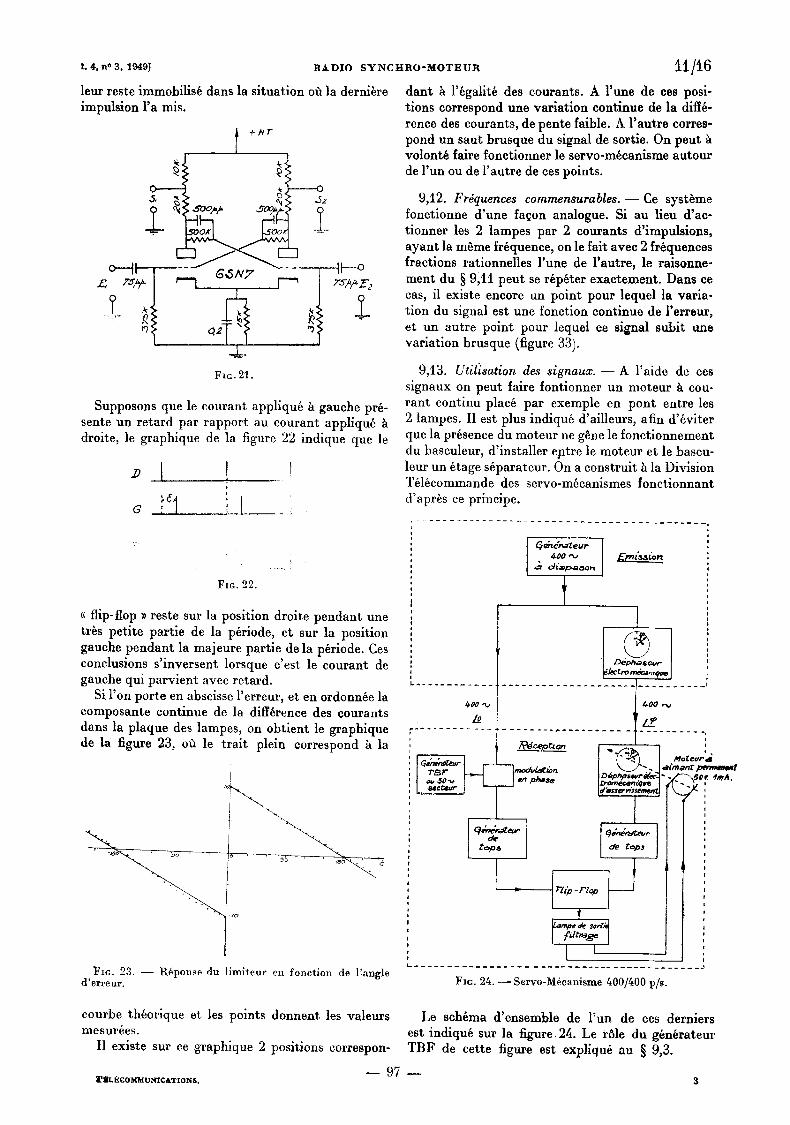
leur reste immobilis6 dans la situation off la derni~re impulsion l'a mis.
l + H T
. . . . !t _g.
Fzc. 21.
Supposons que le courant appliqu6 h gauche pr6- sente un retard par rapport au courant appliqu6 droite, le graphique de la figure 22 indique que le
G : I
FzG. 22.
c~ flip-flop r reste sur la position droite pendant une tr6s petite pattie de la p6riode, et sur la position gauche pendant la majeure partie de la p6riode. Ces conclusions s'inversent lorsque c'est le courant de gauche qui parvient avec retard.
Si l'on porte en abscisse l'erreur, et en ordonn6e la composante continue de la diff6rence des courants dans la plaque des lampes, on obtient le graphique de la figure 23, off le trait plein correspond h la
~ ' ~ ' ~ , ~ o - - - - ~ - - ~ - - _ b % ~ _ c , ,
FIG. 23. - - R6ponse du limiteur en fonction de l!angle d'erreur.
RADIO SYNCHRO'MOTEUR 1t/16 dant h l'6galit6 des courants. A l'une de ees posi- tions correspond une variation continue de la diff6- renee des courants, de pente faible. A l 'autre corres- pond un saut brusque du signal de sortie. On peut h volont6 faire fonetionner le servo-m6canisme autour de Fun ou de l 'autre de ces points.
9,12. Fr~quences commensurables.- Ce syst6me fonctionne d'une fa~on analogue. Si au lieu d'ac- tionner les 2 lampes par 2 courants d'impulsions, ayant la mgme fr6quence, on le fair avec 2 fr6quencos fractions rationnelles l'une de l'autre, le raisonne- ment du w 9,11 peut se r6p6ter exaetement. Dans ce cas, il existe encore un point pour lequel la varia- tion du signal est une fonction continue de l'erreur, et un autre point pour lequel ce signal subit une variation brusque (figure 33).
9,t3. Utilisation des signaux.- A l'aide de ees signaux on peut faire fontionner un moteur ~ eou- rant continu plae6 par exemple en pont entre les 2 lampes. I1 est plus indiqu6 d'ailleurs, afin d'6viter que la pr6sence du moteur ne g~ne le fonctionnement du basculeur, d'installer entre le moteur et le bascu- leur un 6tage s6parateur. On a construit h la Division T616commande des servo-m6canismes fonctionnant d'apr~s ce principe.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ,
06nd,~teur ] �9 ~-oo ,~, E m f ~ i o n
,~ dia~aon
I
t
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . &kO0 ~ . . . . . . . . . . ~00 r v I
" ~ . ~ . . . . . . . . . . . . . . . . . ~ . . . . . . . . . . , |
. __L_ - . " ~ : ~ / ~ ,, - . ~s ~ t
Z'~.s de tops
7q z'p - F'l op t
fat,.,._~ I I
Fro. 24. - - Servo-M~canisme ~00/400 p/s.
courbe th6orique et les points donnent les valeurs Le sch6ma d'ensemble de l 'un de ces derniers mesur6es, est indiqu6 sur la figure 24. Le rSle du g6n6rateur
I1 existe sur ce grapbique 2 positions correspon- TBF de cette figure est expliqu6 au w 9,3.
~ J L I ~ C O 1 M ~ q U I % ~ T I O N S o ~ 9 7 ~ 3
i2/16
9,2. Discriminateurs donnant directement de la p u i s s a n c e . - Les syst~mes d6crits en 9,1 corn- portent d'es lampes h vide pouss6, ne donnant que de faibles puissances en courant continu. On peut, ou bien amplifier ce courant continu par tous moycns connus, ou bien chercher des basculeurs donnant directement des puissances suttlsantes.
9,21. Thyra t rons b a s c u l e u r s . - On peut utiliser comme basculeur n ' importe quel 6clateur, que l 'on commande par impulsions :
Un 6clateur a en effct les propri6t6s suivantes : s'il est aliment6 par une source de tension continue, la valeur de cette tension 6tant inf6ricure h sa ten- sion d'amor~age, une impulsion positive appliqu6e sur l 'anode provoquera l 'allumage de l'arc. L'arc une fois amorc6 restera allum6. Cet arc pourra ~tre 6teint sous Faction d 'une impulsion n6gative suffi- samment forte pour maintenir la tension en-dcssous de la valeur critique d'amor~age et cela pendant un temps qui scra de l 'ordre de grandeur du temps de d6sionisation de l'6clateur.
Un tel dispositif permct donc de commuter des intensit6s 61ev6es, quelques dizaines d'amp~res par exemple, au moyen de puissances relativement fai- bles (quelques watts par exemple).
On remarquera que l ' impulsion n6cessaire pour produire l 'allumage ne demande qu'une puissance tr~s faible ; par contre, l ' impulsion destin6e h pro- duire l 'extinction consommera de l'6nergie. Dans ces conditions, ainsi qu'il est habituel dans les mon- tages h thyratrons, on peut 6teindre p6riodiquemcnt les 6clateurs, par exemple en los al imentant en cou- rant alternatif.
Au Laboratoire, seuls ont 6t6 6tudi6s les 6clateurs thyratrons. Le thyra t ron est a l iment6 en courant
continu, la polarisation de la grille 6tant telle que le tube ne s'allume pas. Dans ces conditions une impulsion positive appliqu6e sur la grille provoque l'allumage. L 'ext lnct ion est provoqu6e par une im- pulsion n6gative appliqu6e sur la plaque.
Cette impulsion peut gtre produite par la d6charge d 'une capacit6 h travers une ]ampe.
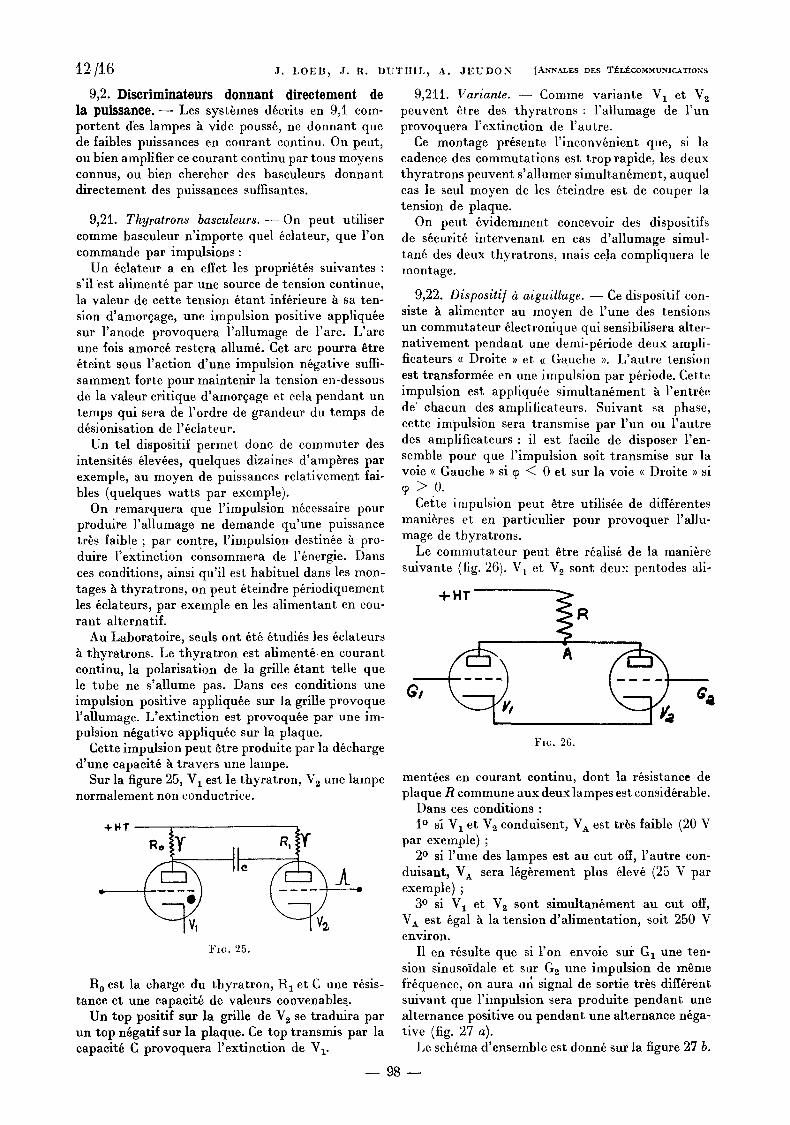
Sur la figure 25, V 1 est le thyra t ron , V 2 une lampe normalement non conductrice.
+HT
A
Fro. 25.
R 0 est la charge du thyra t ron , R 1 et C une r6sis- tance et une capacit6 de valeurs convenables.
Un top positif sur la grille de V~ se traduira par un top n6gatif sur la plaque. Ce top transmis par la capacit6 C provoquera l 'extinction de Vz.
J. L O E B , J . R. D U T H I L , A. J E U D O N [ANNALES DES TI~LI~COMMUNICATIONS
9,211. Variante . --- Comme variante V 1 et V 2 peuvent 6tre des thyra t rons : l 'allumage de l 'un provoquera l 'extinction de l 'autre.
Ce montage pr6sente l ' inconv6nient que, s[ la cadence des commutations est trop rapide, les deux thyratrons peuvent s'allumer simultan6ment, auquel cas le seul moyen de les 6teindre est de couper la tension de plaque.
On peut 6videmment concevoir des dispositifs de s6curit6 intervenant en cas d'allumage simul- tan6 des deux thyratrons, mais ce]a compliquera lc montage.
9,22. D i s p o s i t i / d a igu i l luge . - - Ce dispositif con- siste h alimenter au moyen de l 'une des tensions un commutateur 61ectronique qui sensibilisera alter- nat ivement pendant une demi-p6riode deux ampli- ficateurs (( Droite )) et (( Gauche )). L 'autre tension est transform6e en une impulsion par p6riode. Cette impulsion est appliqu6e simultan6ment "~ l 'entr6e de' chacun des amplificateurs. Suivant sa phase, cette impulsion sera transmise par l 'un ou l 'autre des amplificatcurs : il est facile de disposer Fen- semble pour que l ' impulsion soit t ransmise sur la voie (r Gauche )) si ~ < 0 et sur la vole (( Droite )) si ~ > 0 .
Cette impulsion peut gtre utilis6e de diff6rentes mani6res et en particulier pour provoquer l'allu- mage de thyratrons.
Le commutateur peut ~tre r6alis6 de la mani6re suivante (fig. 26). V 1 et V 2 sont deu': pentodes all-
+HT ~ R
Fla. 26.
ment6es en courant continu, dont la r6sistance de plaque R commune aux deux lampes est consid6rable.
Dans ces conditions : 1 ~ si V 1 et V2 Conduisent, V A est tr~s faible (20 V
par exemple) ; 2 ~ si l 'une des lampes est au cut off, l 'autre con-
duisant, V A sera 16g~rement plus 61ev6 (25 V par exemple) ;
3 ~ si V 1 et V2 sont s imultan6ment au cut off, u est 6gal h la tension d 'al imentat ion, soit 250 V environ.
I1 en r6sulte que si l 'on envoie sur G 1 une ten- sion sinusoidale et sur G 2 une impulsion de mgme fr6quence, on aura ur~ signal de sortie tr~s diff6rent suivant que l ' impulsion sera produite pendant une nlternance positive ou pendant une alternance n6ga- rive (fig. 27 a).
Le sch6ma d'ensemble est donn6 sur la figure 27 b.
- - 98
t. 4, n ~ 3, 1949]
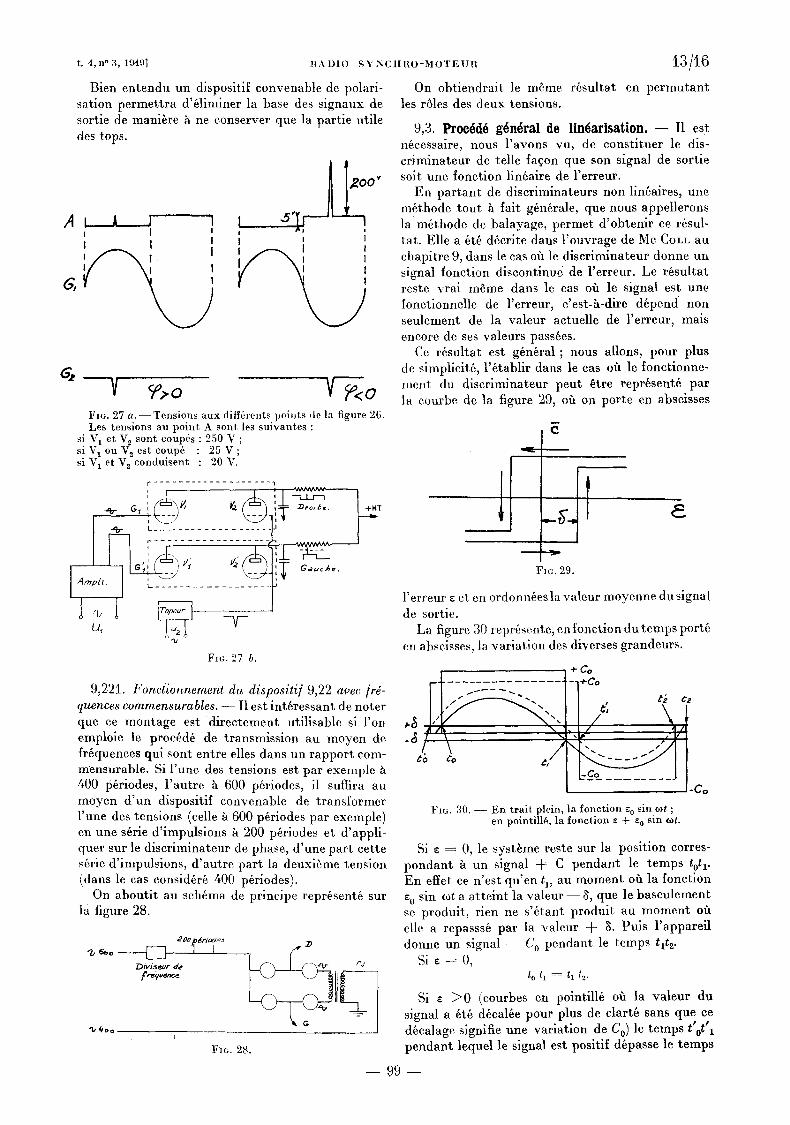
Bien entendu un dispositif convenable dc polari- sation pe rme t t r a d'61iminer la base des signaux de sortie de mani~re h ne conserver que la part ie utile des tops.
RADIO SY 5C ItRO-MOTEUR 13/16 On obt iendrai t lc m6me r6suha t en p e r m u t a n t
les rSles des deux tensions.
200"
A , A I I I i I I I , I t 1 I I A I I
V V ?'<o Fro. 27 a.--Tensions aux diff6rents poiuts de la figure 26. Les tensions au point A sont les suivantes :
si V 1 e t V2 sont coupds : 250 V ; siV louV~estcoup6 : 25V; si ~ 1 e t V2 conduisent : 20 Y.
F . . . . . . . . . . . . . . . . . . . .
L. . . . . . . . . . . . . . . . . . . .
�9 r Ic..7 b.
t G,~ucAe,
9,221. F o n c t i o n n e m e n t du d i spos i t i / 9,22 apec [rd- quences commensurab le s . - - I1 est int6ressant de noter que ce montage est d i r e c t e m e n t utilisahle si l 'on emploie le proc6d6 de t ransmission au moyen de fr6quences qui sont entre elles dans un r appor t com- mensurable. Si l 'une des tensions est par exemple h 400 p6riodes, l ' au t re h 600 p6riodes, il Suflira au moyen d 'un dispositif convenable de t ransformer l 'une des tensions (celle h 600 p6riodes par exemple) en une s6rie d ' impulsions h 200 p6riodes et d 'appli- quer sur le discr iminateur de phase, d 'une par t cet te s6rie d ' impulsions, d ' au t re pa r t la deuxi~me tension (dans le cas consid6r6 400 p6riodes).
On about i t au sch6ma de principe repr6sent6 sur la figure 28.
*11~oo
Diw~eur de
k
Fro. 28.
9 , 3 . P r o c d d 6 g d n f i r a l d e l i n d a r i s a t i o n . ~ I1 est n6cessaire, nous l ' avons vu, de const i tuer le dis- c r iminateur de telle fagon que son signal de sortie soit une fonct ion lin6aire de l 'erreur.
En pa r t an t de discr iminateurs non lin6aires, une m6thode tou t h fai t g6n6rale, que nous appellerons la m~thode de halayage, permet d 'oh ten i r ce r6sul- tat . Elle a 6t6 d6crite dans t 'ouvrage de Mc COLL au chapitre 9, dans le cas off le discr iminateur donne un signal fonction discontinve de l 'erreur. Le r6sul tat reste v ra i m~me dans le cas off le signal est une fonctionnelle de l 'erreur, c 'est-h-dire d6pend non seulement de la valeur actuelle de l 'erreur , mais encore de ses valeurs pass6es.
Ce r6sultat est g6n6ral ; nous allons, pour plus de simplicit6, l '6tablir dans le eas off le fonctionne- ment du discr iminateur peut gtre repr6sent6 par la courbe de la figure 29, oh on por te en abscisses
-2- 1 I
Fro. 29.
l 'erreur z e t e n ordonn6es la valeur moyenne du signal de sortie.
La figure 30 repr6scnte, en fonction du temps port6 en abscisses, la var ia t ion des diverses grandeurs.
[ § +Co
i . , , - .
L-co_----
Fro. 30. - - En trait plein, la fonction % sin tot ; en pointill6, la fonction r + go sin tot.
-Co
S i r = 0, le syst~me reste sur la posit ion corres- pondan t h u n signal + C pendan t le t emps tot 1. En effet ce n 'es t qu 'en t~, au momen t oh la fonction z o sin o~t a a t te int la v a l e u r - - 8, que le basculement se produit , rien ne s '6 tant produi t au m o m e n t off elle a repasss6 par la valeur + 8. Puis l ' appare i l donne un signal - - C o pendant le t emps t i t 2.
S i z e 0 , t o t I = t I t 2 .
Si ~ > 0 (courhes en pointill6 off la va leur du signal a 6t6 d6cal6e pour plus de clart6 sans que ce d6calage signifie une var ia t ion de Co) le t emps t/0tt 1 pendan t lequel le signal est positif d6passe le t emps
- - 9 9 - -
14 / i6
ttltP~ pendant lequel il est n6gatif. Le calcul donne dans ce cas :
~, 2Co
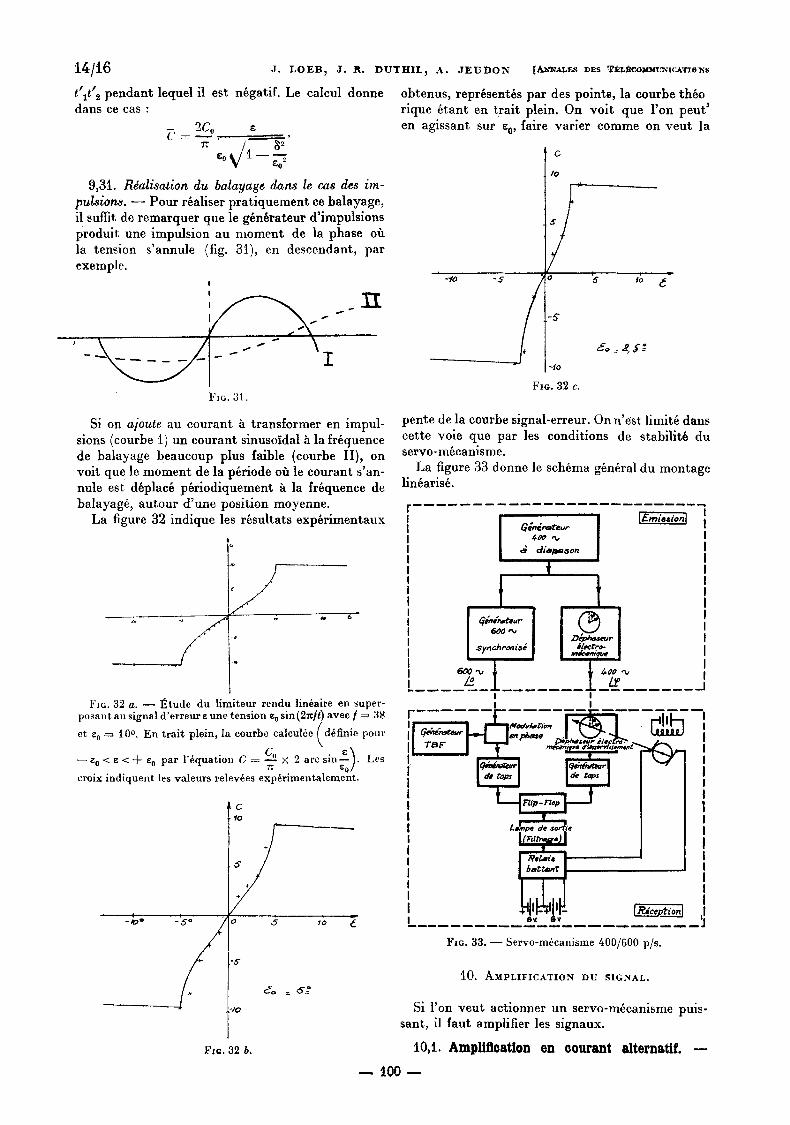
9,31. ROalisation du balayage dar~ le ~ s des im- pulsion. ~ Pour r~aliser pratiquement ce balayage, il suflit de remarquer que le g6n6rateur d'impulsions produit une impulsion au moment de la phase o6 la tension s'annule (fig. 3t), en descendant, par exemple.
FIG. 31.
J . LOEB~ J . R. D U T H I L ~ A. J E U D O N [AlCl~ES DES Ts
YI;
Si on aioute au courant h transformer en impul- sions (courbe t) un courant sinusoidal h la fr6quence de balayage beaucoup plus faible (courbe II), on volt qu e le moment de la p6riode off le courant s'an- nule est d6plae6 p6riodiquement h la fr6quence de balayage, autour d'une position moyenne.
La figure 32 indique les r6sultats exp6rimentaux
/
FIG. 32 a. ~ l~tude du l imi teur r endu lin6aire en super- posan t au signal d ' e r r eu r r une tens ion % sin (2:~/t) avec / = 38
et r = t 0 ~ E n t r a i t plein, la courbe calcul6e (d6f in ie pour k
%<r162176 par l'6quati~ ~o) - - ~ • 2 arc sin . Les
croix ind iquen t les va leurs relev6es exp6r imenta lement .
~C . "to
! - . ~ o / 0
/0
FXG. 32 b,
obtenus, repr6sent6s par des points, la courbe th6o rique 6tant en trait plein. On voit que l'on peut' en agissant sur r faire varlet comme on veut la
G
/o
f -S
~fo
Fro. 32 c.
pente de la courbe signal-erreur. On n'est limit6 dans cette vole que par les conditions de stabilit6 du servo-m6canlsme.
La figure 33 donne le sch6ma g6n6ral du montage lin6aris6.
r ,~
t
t t ~ y n c h r a l i ~ 6 ~ltvrro.
I ! ! !
_d
! I I I I I I 1 I I I I I I I I
FIG. 33. - - Servo-m6canisme 400/600 p/s .
t 0 . AMPLIFICATION DU SIGNAL,
Si l'on veut aetionner un servo-m6canisme puis- sant, il faut amplifier les signaux.
10,t. A m p l i f i c a t i o n e n c o u r a n t a l t e r n a t i f . - -
iO0
t. 4, n ~ 3, 1949]
Aueune difficult6 ne se pr6sente dans ce cas. On peut noter des sch6mas existants permet tant d 'am- plifier des courants alternatifs ~ 50 c/s par exemple, sans n6cessiter de tension plaque continue (fig. 34).
RADIO S Y N C t t R O - M O T E U R t 5 / 1 6
trices), sous Faction d'impulsions transmlses par les voies (( Droite )) ou t( Gauche ~).
Ce d6tour a 6t6 n6cessaire pour 6viter d'avoir h 6tudier des transformateurs capables de t ransmet t re
q , o
C ~
O
Fro. 3~.
10,2. C o u r a n t s c o n t i n u s . - La technique d'am- plification des courants continus a reeu, depuis quel- ques ann6es, l 'appoint de 2 m6thodes bien connues :
10,21. L'amplificateur magn~tique.- Deux am- plificateurs magn6tiques sont en construction pour notre Division au Laboratoire de l'l~cole Normale Sup6rieure.
i0,22. L 'ampl idyne . - Notre Division poss~de un amplidyne r6cup6r6 sur un (( Marauder 7). Lorsque le courant continu h amplifier provient du balayage lin6arisateur (w 9,3), l'hyst6r6sis consid6rable que pr6sente l 'amplidyne n'est pas g~nante, car on l 'a vu, le signal moyen h la sortie est, dans ce cas, pro- portionnel au courant .a l'entr6e.
10,3. UTILISATION DES T H y R A T R O N S . - - O n c o n n a l t
un grand nombre de sch6mas permet tant d'obtenir la puissance en courant continu au moyen de thyra- trons. Nous nous contenterons de citer ici des mon- tages particuliers s 'adaptant hien aux sch6mas d6crits dans les paragraphes pr6c6dents.
10,31. Basculeurs, - - Remarquons d'abord que les basculeurs h thryra t rons d6erits au w 9,2 r6pon- dent d6jh h la question.
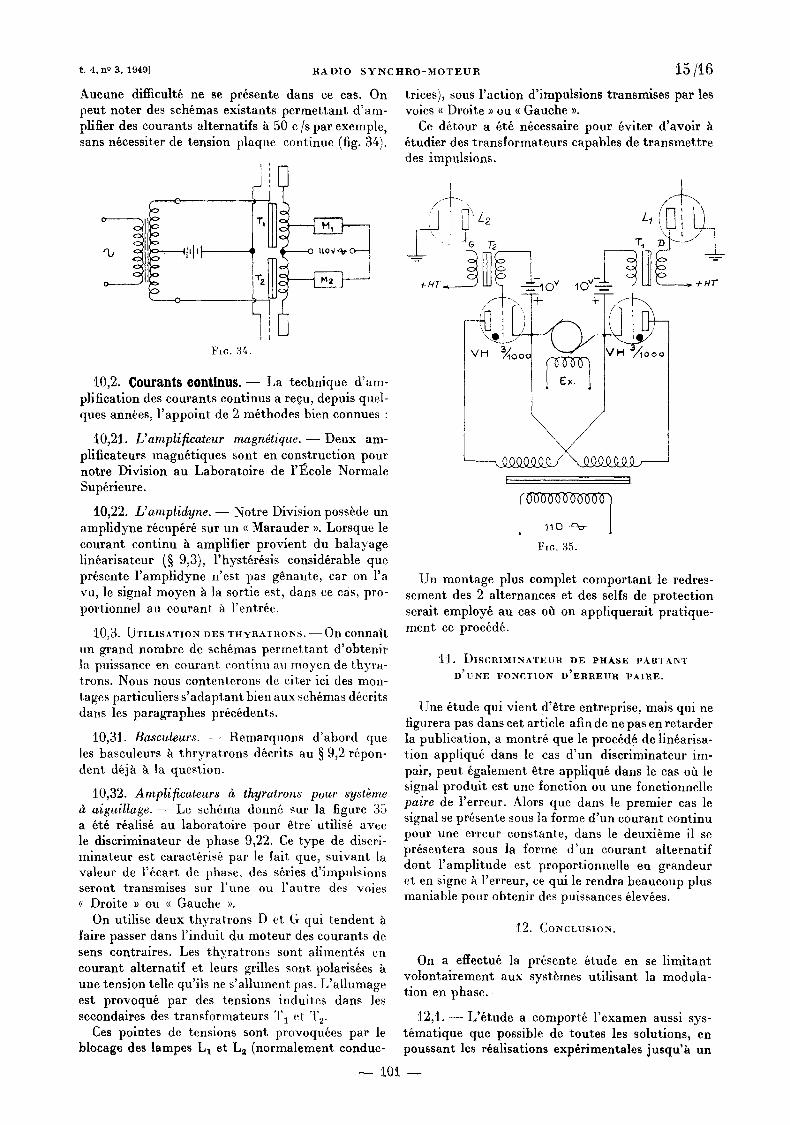
t0,32. Amplificateurs it thyratrons pour syst~me d aiguil lage.--Le sch6ma donn6 sur la figure 35 a 6t6 r6alis6 au laboratoire pour ~tre utilis6 avec le discriminateur de phase 9,22. Ce type de discri- minateur est caract@is~ par le fait que, suivant la valeur de l'6cart de phase, des s6ries d'impulsions seront transmises sur l 'une ou l 'autre des voles (( Droite )~ on c( Gauche )).
On utilise deux thyratrons D et G qui tendent h faire passer dans l ' induit du moteur des courants de sens contraires. Les thyratrons sont aliment& en courant alternatif et leurs grilles sont polaris6es h une tension telle qu'ils ne s 'allument pas. L'allumage est provoqu6 par des tensions induites dans les secondaires des transformateurs T 1 et T 2.
Ces pointes de tensions sont provoqu6es par le blocage des lampes L1 et L= (normalement conduc-
des impulsions.
I
lOOO
E t
110
Fro. 35.
Un montage plus complet comportant le redres- sement des 2 alternances et des sells de protection serait employ6 au cas off on appliquerait pratique- ment ce proc6d6.
~J. [)ISCRIMINATEUR DE PHASE PARTANT
D~UNE FONCTION D~ERREUR PAIRE.
Une 6tude qui vient d'gtre entreprise, mais qui ne iigurera pas dans cet article afin de ne pas en retarder la publication, a montr6 que le proc6d6 de lin6arisa- tion appliqu6 dans le cas d 'un discriminateur im- pair, peut 6galement ~tre appliqu6 dans le cas off le signal produit est une fonction ou une fonctionnelle paire de l'erreur. Alors que dans le premier cas le signal se pr6sente sous la forme d 'un courant continu pour une erreur constante, dans le deuxibme il se prdsentera sous la forme d 'un courant al ternatif dont l 'amplitude est proportionnelle en grandeur et en signe h l'erreur, ce qui le rendra beaucoup plus maniable pour obtenir des puissances 61ev6es.
]2 . CONCLUSION,
On a effectu6 la pr~sente 6rude en se limitant volontairement aux syst~mes utillsant la modula- tion en phase.
1 2 , 1 . - L'6tude a comport6 l'examen aussi sys- t6matique que possible de routes les solutions, en poussant les r6alisations exp6rimentales jusqu'h un
16/16
stade suffisant pour d6montrer les possibilit6s des r6alisations.
On a moins cherch6 h r6aliser imm6diatement un mat6riel poss6dant la pr6cision la meilleure que recherch6 les causes d'erreur et les proc6d6s bas6s sur des principes capables de les dimifiuer ou de les supprimer.
Aucun des m6carrismes construits ne l 'a 6t6 en rue d'une application d6termin6e, mais bien afin d'ai~porter une confirmation exp6rimentate aux prin- cipes 6tudi6s.
Y2,2. La modulation en phase conduit h des syst~mes de transmission des angles jouisssant des avantages suivants :
a) faible bande passante, d'ofi protection contre les bruits ;
b) caract~re s6culaire de la transmission, d'ofi possibilit6 d'obtenir une pr6cision quelconque au nloyen d ' une d6multiplication convenable.
t2,3. - - Un certain nombre de principes nouveaux ont 6t6 mis en 6vidence.
1 ~ Extension h ce probl~me des solutions appli-
J . I, OEB~ J . R. D U T H I L . A. J E U D O N [ANNALES DES TI~.LI~COMMLrNICATIONS
qu6es aux DECCA (utilisation de 2 fr6qucnces com- mensurables entre elles).
2 ~ R6alisation d 'un d6phaseur, qui s'est r6v616 extrgmement commode d'emploi.
36 Mise au point d 'un phasembtre utilisant des impulsions.
4 o Lin6arisation par balayage.
t 2 , 4 . - Parmi les diverses solutions examin6es, on choisira celle qui convient le mieux au genre de probl~me pratique qui se posera. Par exemple, les proc6d6s 6tudi6s darts le w 8 pourront convenir lors- que la transmission (radio ou ill) pr6sentera un gain sufl]samment constant.
Les proc6d6s examin6s au w 9 pourront gtre uti- lis6s dans le cas o~ la vole de transmission de la t616- commande aura une bande suffisamment large pour permettre l 'envoi direct des impulsions, ou dans le cas d 'une transmission trop irr6guli~re pour quc les systbmes du w 8 soient facilement applicables.
Enfin, lorsque la puissance n6cessaire sera 61ev6c, on choisira, parmi les systbmes du w 10, celui qui satisfera le mieux aux conditions d 'encombrement, de poids, et de sources de courant accessibles.
B R E V E T S C. iN. E. T.
Dispos i t i f de t r ansmiss ion des m o u v e m e n t s de ro t a t i on d ' u n a rbre . . . . . . . . . . . . . . . . . . 53 t~ 565 D6phaseur 61ectro-m6canique (addi t i f en cours de d6p6t) . . . . . . . . . . . . . . . . . . . . . . . . . 5 t~0 743
P e r f e c t i o n n e m e n t aux t r a n s m e t t e u r s d ' ondes r6alis6s au m o y e n de po ten t iom6t re s en cours lin6aires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . de d6pSt
P h a s e m 6 t r e 61ectronique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543 32 t Proc6d6 et appare i l pour la d i sc r imina t ion de phase pour f r6quences commensurab le s . 5 t~3 818
J , , . , , �9
A m p h f i c a t e u r e l e c t r o - m e c a m q u e a reac t ion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 550 330 P e r f e c t i o n n e m e n t aux m o n t a g e s basculeurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 553 578 D i sc r im ina t e u r de phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . d6p6t en
Cas "145 J . LOEB Cas 149 J., Pt, DUTItH, Cas t49A ,J. R. D. Cas 203 J . R . D .
Cas 157 J . R . D . Cas 163 J . L . Cas 182 J . R . D . C a s t 9 2 J . R . D .
cours J . L
M a n u s c r i t re~u le 16 j u i n 1948.
C O M P T E S R E N D U S D E L I V R E S
JAMES (HI M.),. NICHOLS (N. B.) , PHILLIPS '(R. S.). - - T h ~ o r i e des servo-mgcanismes (Theory of servo- mechanisms). Mc Graw-Hill Book Company, New- York, 1947, 375 p. (~c Radiation Laboratory Series - - M. I. T. ,. - - Don de l 'gditeur.)
Dans une premiere partie qui, h elle seule, constitue une excellente monographie, le technicien "du servo- m6canisme trouvera, rassemblds en quelques pages, tous les renseignements th6oriques et pratiques dont il aura besoin.
Apr~s avoir rappel6 les notions th6oriques n6cessaires (th6orie des r6seaux, transformations de FOURIER, trans- formation de LAeLACE, th6or~me de NYQUIST), et avoir 6tudi6 d'une mani6re tr~s complete les diff6rents 616ments du servo-m6canisme (appareils d6tecteurs d'erreur, sel- syn, potentiom~tres, moteurs, amplidyncs, modulateurs et d6modulateurs, trains d'engrenage et r6seaux correc- teurs), les auteurs montrent comment, au moyen de quelques raisonnements et mesures 616mentaires, il est possible de mettre en 6vidence les diff6rents param6tres (le plus souvent-sous forme de constante de temps) qui earact6risent le servo-m6canisme, et de construire d'une mani~re expfditive mais suffisamment precise, au moyen
de ces param~tres, les graphiques repr4sentant, en fonction de la tr6quence, l'amplitude et la phase de la fonction de transfert du servo-m6canismc. C'est en partant de ces graphiques que scront 6tablis les dispositifs correcteurs, et d6termin~es les performances du servo-m6canisme ; plusieurs exemples d6taill6s ~llustrent cettc th6orie. En fin de cette premiere partie, un chapitrc sp6cial traite le cas des servo-m6canismes off la grandeur d'entr6e est une fonction discontinue du temps (servo-system with pulsed data),
Une deuxi~me pattie constitue l'expos6 d'une th6orie nouvelle du servo-m6canisme soumis h des perturbations accidentelles. Cette th6orie a 6t6 6tablie pour mettre au point le dispositif du radar ~ poursuite automatique. Dans de tels servo-m6canismes le probl~me est en effet compliqu6 par le fair que le signal d'entr6e peut ~tre notablement perturb6 par des parasites, le fading et le bruit de fond du r6cepteur. Cette nouvelle th6orie tient compte des propri6t6s statistiques de la grandeur d'entr6e et des propri6t6s statistiques des perturbations. Des exemples compl~tent cette deuxi~me partie.
J. R. DUTmL.
- - t02