-
8/9/2019 Recherche 18
1/6
R E S E A R C H N O T E
The role of cocontraction in the impairment of movementaccuracy
with fatigue
Olivier Missenard
Denis Mottet
Stephane Perrey
Received: 4 October 2007 / Accepted: 19 December 2007
Springer-Verlag 2008
Abstract The present experiment was designed to test the
hypothesis that fatigue-induced impairment in movementaccuracy
is caused by a decrease in muscle cocontraction
rather than a reduced ability to produce muscular force.
Seven participants performed fast and accurate elbow
extensions aimed at a target, before and after a fatigue
protocol. The inertia of the manipulandum was decreased
after the fatigue protocol so that the ratio of required to
available force during movements was identical pre- and
post-fatigue. After the fatigue protocol, movement end-
point accuracy decreased and movement endpoint
variability increased. These alterations were associated
with a decrease in cocontraction. We concluded that the
impairment of movement accuracy during fatigue could not
be explained by the lack of available force, but was likely
to be due to a fatigue-induced decrease in muscular co-
contraction. We then speculate that fatigue influences the
relative weights of accuracy and energy economy in the
optimisation of sensorimotor control.
Keywords Fatigue Movement accuracyMotor control Cocontraction
EMG
Introduction
Muscular fatigue is experienced in many situations where
movement control is crucial, from the use of manmachine
interfaces to taking a final shot in a professional
basketball
game. Thus, it is of particular interest to understand the
functional consequences of muscular fatigue. Fatigue is
classically defined as a loss of maximal available force
(e.g. Edwards1981). It is likely that this loss of available
force affects motor control, especially for movements
requiring high forces, but fatigue has also been shown to
impair movement accuracy for movements requiring rela-
tively small forces (Hoffman et al.1992; Jaric et al.1999).
This effect on accuracy, when the level of available force
does not seem to be a limiting factor for motor control,
suggests that other factors besides the lack of available
force may play an important role in the impairment of
movement accuracy with fatigue.
A likely candidate to explain the impairment of move-
ment accuracy with fatigue is muscular cocontraction,
defined as the simultaneous activation of agonist and
antagonist muscles around a joint. Indeed, cocontraction
has been shown to increase movement endpoint accuracy
(e.g. Gribble et al. 2003). Moreover, when participants are
requested to use cocontraction to point at a target,
endpoint
accuracy is improved (Osu et al.2004). This improvement
is mainly attributed to the fact that cocontraction
increases
limb impedance (Osu and Gomi1999), and thus limits the
variability induced by neuromuscular noise (Selen et al.
2005). Hence, if fatigue decreases cocontraction, we can
predict a decrease in movement endpoint accuracy and an
increase in endpoint variability.
To our knowledge, the effect of fatigue on cocontraction
during aimed arm movements has never been studied.
However, it makes sense that fatigue could decrease
O. Missenard D. Mottet (&) S. PerreyEA 2991, University
Montpellier 1, 700 av. du pic Saint Loup,
34090 Montpellier, France
e-mail: [email protected]
O. Missenard
e-mail: [email protected]
S. Perrey
e-mail: [email protected]
1 3
Exp Brain Res
DOI 10.1007/s00221-007-1264-x
-
8/9/2019 Recherche 18
2/6
cocontraction levels. The rationale for this hypothesis is,
first, that a decrease in limb impedance during movement
has been already observed during fatigue (Selen et al.
2007). Second, cocontraction is metabolically costly since
it requires additional muscular activation, and thus it
could
be decreased in order to minimize energy expenditure
when energy reserve is decreased.
This study was designed to test the hypothesis
thatfatigue-induced impairment in movement accuracy is
caused by a decrease in muscle cocontraction rather than a
reduced ability to produce muscular force.
Methods
Seven right-handed participants (three females and four
males) between the ages of 24 and 34 took part in the
study. They had to perform pointing movements before and
after a fatigue protocol. Maximal voluntary contraction
(MVC) was measured at the beginning of the experiment,after the
fatigue protocol, and at the end of the experiment,
in order to evaluate the effect of fatigue on force
generation
capabilities. All study procedures complied with the Hel-
sinki declaration for human experimentation and were
approved by the local ethics committee.
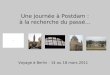
Figure1 shows a schematic representation of the
experimental setup and the experimental protocol. Partici-
pants sat in a chair during the whole experiment. The chair
was positioned in front of a 2 9 3 m screen with the elbow
and forearm of their right arm resting on a manipulandum
that consisted of an aluminium bar. The elbow was aligned
on the vertical axis of rotation of the manipulandum, and
the arm was abducted 90. Participants grasped a vertical
handle so that they could rotate the manipulandum in the
horizontal plane. When flexing or extending their elbow,
participants moved a laser dot on the screen, indicating the
actual position of the joint.
During MVC measurements and fatigue protocol, the
manipulandum was locked at 90 (180 corresponding to
full elbow extension). Extension and flexion forces were
measured with a strain gauge (accuracy 0.5 N, FN3030,
FGP Sensors, Les Clayes Sous Bois, France) placed in the
plane of rotation of the manipulandum. During pointingmovements,
the elbow angle was measured by a potenti-
ometer fixed on the axis of rotation of the manipulandum.
Pairs of Ag/AgCl electrodes (Controle Graphique Medical,
Brie-Comte-Robert, France) were used to record surface
electromyography (EMG) of the biceps brachii, the bra-
chioradialis, and the long and lateral heads of triceps all
along the experimental protocol. Electrode location was set
according to SENIAM recommendations (Hermens et al.
2000). Inter electrode distance was 10 mm. EMG signal
was amplified (91000, Biovison, Wehrheim, Germany).
All signals were sampled at 1,000 Hz with an A/D USB
DAQ 6009 National Instrument card (National Instru-ments,
Austin, TX, USA), and stored on a computer for
subsequent analysis.
For the MVC measurement sessions, participants had to
perform alternately 2 maximal isometric flexions and 2
maximal isometric extensions. Contraction duration was
5 s, and contractions were separated by 45 s of passive
rest.
Maximal torque was computed as the maximal torque value
observed during a 500 ms window. We retained the MVC
value corresponding to the mean of the 2 MVCs performed.
The maximal EMG value (EMGmax) was the mean rectified
and filtered EMG recorded during the 500 ms corre-
sponding to the maximal torque of the highest trial.
The fatigue protocol consisted of the repetition of 20-s
isometric contractions. The workload was fixed at 60% of
the MVC measured at the beginning of the experiment.
Strain gauge
0% 60% 100%
90
Start line Target
Laser
A B
C
Fatigue protocol MVC2Pre-fatiguemovement session
Post-fatiguemovement session
MVC3MVC1
Fig. 1 Experimental setup during the fatigue protocol (a) and
pointing movements (b), and experimental protocol (c)
Exp Brain Res
1 3
-
8/9/2019 Recherche 18
3/6
Contractions were elbow flexions and extensions per-
formed alternately, separated by periods of 15 s of passive
rest. A visual feedback was projected on the screen to
allow participants to control their force level.
Participants
had to continue the task until exhaustion, when they were
unable to maintain the workload for at least 5 s.
During the pointing movement sessions, participants
could not see their arms. For each trial, participants wereasked
to move the laser dot from the starting position (70)
to the target (110). Participants were asked to point as
accurately as possible without correcting their movement
online. To avoid eventual online corrections, the laser dot
disappeared 100 ms after movement onset. Since move-
ment accuracy is related to movement time and kinematics
(Woodworth 1899), participants were asked to perform
300 ms movements with a tolerance of 30 ms. Partici-
pants were informed of their movement endpoint position
and movement time 1 s after movement end. If movement
time was not in the acceptable range, the trial was
repeated.
The percentage of trials that did not satisfy the movementtime
constraint was 33 15%. A Student t test revealed
that this percentage was unaffected by fatigue (t= 0.49,
P = 0.64). Movement sessions ended once 15 acceptable
trials were performed.
An inertial load of 1.5 kg was added on the manipu-
landum in order to impose the peak torque required during
movement. To obtain a peak torque corresponding to 40%
of participants MVC both pre- and post-fatigue, we
adapted the distance between the load and the axis of
rotation of the manipulandum. This distance was computed
by taking into account the anthropometric properties of
participants limbs based on Winters tables (Winter2005),
and the fact that the mean value of peak acceleration was
about 2,800 s-2. The value of 2,800 s-2 was estimated
from a pre-test experiment. The distance D (m) was
obtained with the following equation:
D
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiT
Apeak Iforearm Ihand Im
L
s 1
where T was the required peak torque during movement
(40% of MVC), Apeakwas the estimated peak acceleration
(2,800 s-2), Iforearm was the inertial moment of the fore-
arm (between 0.010 and 0.024 Nm), Ihand was the inertialmoment
of the hand (between 0.024 and 0.066 Nm), Imwas the inertial moment
of the manipulandum (between
0.023 and 0.029 Nm, depending on the handle position),
and Lwas the load added on the manipulandum (1.5 kg).
In order to keep the ratio of required to available force
constant between the pre- and post-fatigue conditions, the
distance between the load and the axis of rotation was
computed with respect to the current extension MVCs of
each participant. Consequently, for each participant, the
inertia of the manipulandum was smaller in the post-fatigue
movement session, to compensate for the fatigue-induced
decrease in MVC.
Figure2shows an example of data recorded during the
movement session. For the 15 acceptable trials in each
condition that were retained for analyses, joint angle
signal
was filtered with a second order Butterworth low-pass filter
with a 10 Hz cut-off frequency. Filtered signal was
differ-entiated to obtain angular velocity and acceleration. We
distinguished two measures of movement time (Selen et al.
2006). Movement time used to constrain movement duration
(MT1) was defined as the time interval between the first
moment when velocity exceeds 10 s-1 and the following
time when the velocity falls to 10 s-1. Since a terminal
backward submovement could occur, we defined the
movement time used for all the subsequent analysis (MT2) as
the time interval between the first moment when velocity
exceeds 10 s-1 and the last time when the velocity falls to
10 s-1. We measured movement endpoint accuracy with
constant error, defined as the mean distance between theposition
at movement end and the target location. Movement
endpoint variability was assessed by variable error, defined
as the mean distance between the endpoint of each trial and
the overall average endpoint position within the session.
EMG signal obtained during movement was full-wave
rectified and filtered with zero lag (second order Butter-
worth low-pass filter with a cut-off frequency of 6 Hz) to
determine the linear envelope. The EMG linear envelope
was normalized relative to EMGmax. To avoid possible
effects of fatigue-induced changes in elbow muscular
synergies, we computed mean EMG of each synergist pairs
(triceps lateral head-triceps long head vs. biceps brachii-
brachioradialis). Agonist and antagonist activations were
defined as the integral of the agonist and antagonist
bursts,
respectively. Since burst duration varied across trials, we
divided these values by the respective burst duration. Based
on EMG signals, we estimated cocontraction with an index
of cocontraction (CI) adapted from Kellis et al. (2003). CI
was defined as follow:
CI
Rtft0
EMGmin dt
Rtf
t0EMGago + EMGant
dt
100 2
where t0 is movement onset, tfis movement end, EMGminis at each
sampling point in time the EMG signal of the
synergist pair which has the lower normalized activity,
EMGago the EMG of the agonist pair, and EMGant the
EMG of the antagonist pair.
The effects of fatigue on the variables computed from
the MVC procedures and the movement sessions were
assessed with one-way repeated-measures ANOVA. All
values are expressed as mean inter-participants standard
deviation (SD). Statistical significance was set at a =
0.05.
Exp Brain Res
1 3
-
8/9/2019 Recherche 18
4/6
Results and discussion
We first have to assess the validity of our experimental
paradigm. Our fatigue protocol was designed to induce a
substantial loss of maximal available force. The decline in
MVC torque after the fatigue protocol was 33.9 9.8%
for the extensor muscles [MVC1 = 46.9 16.6 Nm vs.
MVC2 = 30.3 12.2 Nm, F(2,12) = 20.4, P\ 0.01] and
25.7 10.7% for the flexor muscles [MVC1 = 67.4
19.4 Nm vs. MVC2 = 49.0 14.3 Nm, F(2,12) = 19.5,
P\ 0.01]. MVC values recorded during the terminal
MVC session were significantly lower than during the
pre-fatigue session, in extensors [MVC3 = 36.9 14.3
Nm, F(2,12) = 20.4, P\ 0.01] and in flexors [MVC3 =
56.5 18.3 Nm, F(2,12) = 19.5, P\ 0.01]. Taken toge-
ther, these results indicate that our protocol was
successful in inducing a significant fatigue that lasted
during the whole second pointing movement session, in a
similar fashion in flexor and extensor muscular groups.
We also have to asses the validity of our pointingmovement
protocol. First, we wanted to avoid any effects
of movement kinematics on endpoint accuracy. This was
done by imposing MT1 with a tolerance of 30 ms.
Unexpectedly, MT1 values showed a small but significant
decrease in the post-fatigue condition [310 4 ms vs.
297 7 ms, F(1,6) = 14.0, P\ 0.01], and peak velocity
increased [246.8 9.9 s-1, vs. 261.2 10.3 s-1,
F(1,6) = 13.6, P\ 0.05]. This could have been due to
fatigue recovery during the second movement session.
However, peak acceleration values were not significantly
different pre- versus post-fatigue [2,400 371 s-2 vs.
2,786 459 s-2, F(1,6) = 3.07, P = 0.13], and, moreimportantly,
we found no significant difference between
pre- (489 65 ms) and post-fatigue conditions (528
94 ms) for MT2 values [F(1,6) = 1.0, P = 0.35]. Thus we
concluded that, despite small differences for some vari-
ables, the movement kinematics was globally similar
between the two movement sessions, and could not be the
main cause of the decrease in endpoint accuracy with
fatigue. Second, we wanted that participants peak torques
during each movement remained close to 40% of their
current MVC. This was done by adapting the inertial load
on the manipulandum. The lack of significant difference in
agonist EMG activity in the pre- versus post-fatigue session
[34.2 10.3% vs. 37.6 8.1%, F(1,6) = 0.94, P = 0.37]
indicated that movements required a similar percentage of
MVC in the two conditions. This indicated that the ratio of
required to available force during movement was not dif-
ferent pre- and post-fatigue, and thus that the load was
correctly adapted in the post-fatigue movement session.
Once verified that our experimental paradigm success-
fully induced fatigue and successfully normalised the force
required during movements to the current participants
capabilities, we can now address the questions that are
central to the present experiment. The first goal was to
demonstrate that fatigue can impair movement accuracy
even when the ratio of required to available force is
unchanged. The lack of available force can reduce the
ability to accelerate and decelerate the limb. Especially,
if
antagonist muscles are unable to slow the movement down,
the accuracy can be decreased since antagonist muscles play
a major role in the control of the final position
(Wierzbicka
and Wiegner1996). However, this would be a critical factor
only in the case of movements requiring forces that are
similar to or higher than the available force. This was
70
110
100 ms10%E
MGmax
1mV
50/sec
A
B
C
D
movement movementonset end
Fig. 2 Example of movement data analysis. a filtered
position
profile. The dashed line represents the target, b velocity
profile.
Dashed lines represent the values of 10 and -10 s-1 used for
the
detection of movement onset and end, c from top to bottom,
rectified
electromyographic (EMG) traces of triceps long head, triceps
lateral
head, biceps brachii, brachioradialis. d EMG linear envelop
of
agonists (grey line) and antagonists (black line). The grey
area
represents EMGminused for the computation of cocontraction (Eq.
2)
Exp Brain Res
1 3
-
8/9/2019 Recherche 18
5/6
obviously not the case in the present experiment, where the
maximal force requirement was maintained constant at 40%
of the available force. We observed that variable error and
constant error increased significantly post-fatigue, as
shown
in Fig.3 [1.7 0.5 vs. 2.0 0.5, F(1,6) = 12.9,
P\ 0.05 and 1.8 0.4 vs. 2.6 0.7, F(1,6) = 12.2,
P\ 0.05, respectively]. There was no tendency either for
undershoot or overshoot of the target after fatigue sincemean
movement endpoint position was unchanged (pre-
fatigue: 110.4 1.0 vs. post-fatigue: 111.0 1.5,
F(1,6) = 0.87, P = 0.39). This is direct evidence that fati-
gue can affect movement accuracy even if the ratio of
required to available force is unchanged. Consequently, the
impairment of endpoint accuracy could not be attributed to
the lack of available force. This raises the question of the
part played by other factors in the control of movement
accuracy during fatigue.
What other factors than the lack of available force could
be responsible for movement accuracy impairment with
fatigue? We argue that fatigue is a more complex phe-
nomenon than a simple decrease in force generation
capabilities. In particular, fatigue could affect the way
the
central nervous system (CNS) deals with accuracy. The
CNS has mainly two ways to deal with movement accuracy.
The first way is to adapt movement time and kinematics to
the accuracy requirement. For instance, movements with
low accuracy constraints are rapid and have a bell
shapedvelocity profile, whereas movements with high accuracy
requirements are characterised by longer movement times
and earlier peak velocity (Woodworth1899). This duration
scaling with accuracy is known as the speed accuracy trade-
off. In our experiment, the CNS could not use this strategy
since we imposed a constant movement time. In such cases,
when movement time is imposed, it has been shown that the
CNS can adapt to the accuracy constraint with an alternative
strategy, namely by increasing muscular cocontraction (e.g.
Gribble et al. 2003; Osu et al. 2004). This increase in co-
contraction increases limb impedance and joint stability,
and minimizes the perturbing effects of forces arising fromlimb
dynamics (Osu and Gomi 1999). Cocontraction has
been shown to increase when the accuracy requirements
increase (Gribble et al.2003), and it has been demonstrated
experimentally (Osu et al. 2004) and numerically (Selen
et al. 2005) that an increase in cocontraction improves
movement endpoint accuracy.
In order to get an insight into limb impedance, cocon-
traction can be inferred from EMG signals (Osu and Gomi
1999). When studying cocontraction on the basis of EMG
signals during fatigue, caution must be taken because the
relation between EMG and force is modified: a given force
is obtained with a higher muscular activation (e.g. Hunter
et al. 2003). In our study, the fact that EMG-force rela-
tionship changes with fatigue was not an obstacle to the
validity of CI. Indeed, CI was computed with the simul-
taneous agonists and antagonists activation, and not only
with the activity of a single muscular group. Thus, CI was
not sensitive to changes in the absolute values of activa-
tion. Nevertheless, a condition was needed for this CI to be
valid during fatigue: the level of fatigue must be similar
in
agonist and antagonist groups. This condition was verified
in our experiment. We observed, as shown in Fig. 3, that
cocontraction decreased significantly during the post-fati-
gue movement session [29.8 5.9% vs. 20.4 3.3%,
F(1,6) = 8.8, P\ 0.05]. Given the role of cocontraction in
movement accuracy, the observed decrease in cocontrac-
tion could be the main factor responsible for the
impairment of endpoint accuracy during fatigue. This
finding is in line with a recent study that showed with
direct
measurement that elbow impedance was decreased during
fatigue in a target tracking task (Selen et al.2007). It is
also
possible that joint stiffness was reduced because intrinsic
stiffness and reflex contributions decreased with fatigue
1
2
3
4
0
1
2
3
4
Pre-fatigue Post-fatigue
Pre-fatigue Post-fatigue
Pre-fatigue Post-fatigue
Cocontractionindex(%)
Variableerror()
Constanterror()
B
A
C
0
1
2
3
*
*
*
0
10
20
30
40
Fig. 3 Mean values of constant error (a), variable error (b),
and
cocontraction index (c) in the two movement sessions. Each
line
corresponds to participants individual evolution. Vertical
bars
represent the inter-participants standard deviation. *
Significant
difference (P\ 0.05)
Exp Brain Res
1 3
-
8/9/2019 Recherche 18
6/6
(Zhang and Rymer 2001). This may have amplified the
effect of the decrease in cocontraction on joint impedance
and movement accuracy.
Based on the present findings, we have proposed that
fatigue modifies the way the CNS deals with the control of
accuracy by decreasing cocontraction. Our protocol was
designed so that the lack of force was not a limiting factor
for movement control: participants had enough reserve offorce in
the fatigue condition and could have increased
cocontraction. If participants were able to improve move-
ment accuracy with cocontraction, why wasnt it used? It
could be that the CNS changes the respective importance
assigned to accuracy control and energy expenditure during
fatigue. It is now well established that the motor system
operates according to optimality principles that represent
constraints as cost functions to minimize (for a review see
Todorov 2004). Since energy minimization alone fails to
account for many behaviour and especially arm movements
(Nelson1983), it has been proposed that the performance
criterion mostly involves a mix of cost terms. For
instance,Todorov (2004) proposed that motor behaviour arises
from
the simultaneous minimization of an error cost (task per-
formance) and an effort cost (energy expenditure). This
idea is supported by the fact that non-fatigued humans
usually manage to satisfy task requirements while mini-
mizing energy expenditure. For instance, it has been shown
that cocontraction represents a compromise between
energy consumption and control of movement accuracy
(Hogan 1984), and that the CNS is able to adapt to per-
turbation by selecting coactivation levels that minimize the
metabolic cost (Franklin et al. 2004). During fatigue
however, energy reserve is decreased so that the nervous
system has obvious reasons to care more about energetic
efficiency. Thus, during fatigue, the CNS could plan and
execute movements by according more importance to
energy expenditure minimization, with the immediate
consequence of a decrease in accuracy. In other words, the
CNS could have chosen to dedicate more importance to
energy economy than to task performance. Future investi-
gations to test this hypothesis, and more generally to study
the optimisation principles used by the CNS during fatigue,
should improve our understanding of sensorimotor control
when facing perturbations.
References
Edwards RH (1981) Human muscle function and fatigue. In:
Medical
P (ed) Human muscle fatigue. Physiological Mechanisms,
London, pp 118
Franklin DW, So U, Kawato M, Milner TE (2004) Impedance
control
balances stability with metabolically costly muscle activation.
J
Neurophysiol 92:30973105
Gribble PL, Mullin LI, Cothros N, Mattar A (2003) Role of
cocontraction in arm movement accuracy. J Neurophysiol
89:23962405
Hermens HJ, Freriks B, Disselhorst-Klug C, Rau G (2000)
Develop-
ment of recommendations for SEMG sensors and sensor
placement procedures. J Electromyogr Kinesiol 10:361374
Hoffman MD, Gilson PM, Westenburg TM, Spencer WA (1992)
Biathlon shooting performance after exercise of different
intensities. Int J Sports Med 13:270273
Hogan N (1984) Adaptive control of mechanical impedance by
coactivation of antagonist muscles. IEEE Trans Automatic
Control 29:681690
Hunter SK, Lepers R, MacGillis CJ, Enoka RM (2003)
Activation
among the elbow flexor muscles differs when maintaining arm
position during a fatiguing contraction. J Appl Physiol
94:2439
2447
Jaric S, Blesic S, Milanovic S, Radovanovic S, Ljubisavljevic
M,
Anastasijevic R (1999) Changes in movement final position
associated with agonist and antagonist muscle fatigue. Eur J
Appl Physiol Occup Physiol 80:467471
Kellis E, Arabatzi F, Papadopoulos C (2003) Muscle
co-activation
around the knee in drop jumping using the co-contraction
index.
J Electromyogr Kinesiol 13:229238
Nelson WL (1983) Physical principles for economies of
skilled
movements. Biol Cybern 46:135147
Osu R, Gomi H (1999) Multijoint muscle regulation mechanisms
examined by measured human arm stiffness and EMG signals. J
Neurophysiol 81:14581468
Osu R, Kamimura N, Iwasaki H, Nakano E, Harris CM, Wada Y,
Kawato M (2004) Optimal impedance control for task achieve-
ment in the presence of signal-dependent noise. J
Neurophysiol
92:11991215
Selen LP, Beek PJ, van Dieen JH (2005) Can co-activation
reduce
kinematic variability? A simulation study. Biol Cybern
93:373
381
Selen LP, Beek PJ, van Dieen JH (2006) Impedance is modulated
to
meet accuracy demands during goal-directed arm movements.
Exp Brain Res 172:129138
Selen LP, Beek PJ, van Dieen JH (2007) Fatigue-induced changes
of
impedance and performance in target tracking. Exp Brain Res
181:99108
Todorov E (2004) Optimality principles in sensorimotor control.
Nat
Neurosci 7:907915
Wierzbicka MM, Wiegner AW (1996) Accuracy of motor responses
in subjects with and without control of antagonist muscle. J
Neurophysiol 75:25332541
Winter DA (2005) Biomechanics and motor control of human
movement. Wiley, Hoboken
Woodworth RS (1899) The accuracy of voluntary movement.
Psychol
Rev 3:1106
Zhang LQ, Rymer WZ (2001) Reflex and intrinsic changes inducedby
fatigue of human elbow extensor muscles. J Neurophysiol
86:10861094
Exp Brain Res
1 3