-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
Resolution numerique des equationsdifferentielles ordinaires
1 Introduction a` la discretisation des E.D.O. 11.1 Quelques
exemples dE.D.O. . . . . . . . . . . . . . 11.2 Methodes dEuler
(explicite, semi-implicite, implicite) 3
2 Analyse numerique des methodes a` un pas 52.1 Definitions
(convergence, stabilite, consistance, ordre) 72.2 Principaux
resultats danalyse numerique . . . . . 8
3 Methodes de Runge-Kutta 103.1 Principe general des methodes de
Runge-Kutta . . 103.2 Methodes de Runge-Kutta usuelles . . . . . .
. . . 12
1 Introduction a` la discretisation des E.D.O.
1.1 Quelques exemples dE.D.O.
Un grand nombre de proble`mes qui seront vus en theorie du
controle secrivent sous la forme devolutiondun certain nombre de
quantites en fonction du temps. Ces proble`mes secrivent comme une
E.D.O.(eventuellement dependant dun ou plusieurs parame`tres, les
controles), et decrivant levolution dune ouplusieurs quantites. Ces
equations peuvent etre du 1er, du 2nd... ou du ne`me ordre,
lineaires ou pas...
Exemple (Voiture en mouvement) On conside`re une voiture se
deplacant sur un axe Ox et dont onpeut controler lacceleration u
(si u > 0 la voiture accele`re et si u < 0 la voiture
decele`re). Lequationdevolution de la position x de la voiture est
donc
d2xdt2
(t) = x(t) = u(t).
Cest une equation du 2nd ordre en temps dependant du controle u.
On peut toujours ecrire une equationdu 2nd ordre sous forme dune
E.D.O. du 1er ordre, en doublant le nombre dinconnues
x(t) = y(t)y(t) = u(t)
(x(t)y(t)
)=(y(t)u(t)
).
Exemple (Trajectoire (x, y, z) dune particule de masse m dans un
champ de potentiel)
m
xyz
= V(x, y, z)
1 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
qui devient du 1er ordre en ecrivant
x = vxVx
(x, y, z)
y = vyVx
(x, y, z)
z = vzVx
(x, y, z)
mvx = Vx
(x, y, z)
mvy = Vy
(x, y, z)
mvz = Vz
(x, y, z)
cest-a`-dire en doublant le nombre dequations...
On pourrait imaginer un controle qui alte`re la trajectoire
(champ electrique, magnetique, etc...).
Exemple (Objet en chute libre) Un asterode sapproche de la terre
en ligne droite. Il subit la forcedattraction gravitationnelle g
ainsi que la force de frottement de lair, qui varie avec laltitude
z commeFf = k v2 eaz, v etant la vitesse de lobjet, k et a des
coefficients de frottement. Dapre`s le principefondamental de la
dynamique, lE.D.O. qui regit le mouvement de lastre est
z = g + k v2 eaz = g + k (z)2 eaz
que lon peut ecrire sous forme dequations du premier ordre :{z =
vv = g + k v2 eaz
Exemple (Evolution epidemiologique) La prediction en
epidemiologie constitue un proble`me majeur enmodelisation. Le
premier mode`le dynamique (simpliste et irrealiste dans la plupart
des cas !) est du a`Hamer en 1906. Soit n le nombre total
dindividus, x le nombre dindividus sains (susceptibles
detreinfectes) et y le nombre dindividus infectes. Soit le taux
dinfection. Le mode`le secrit{
y = xyx = xy
Or x+ y = n, ce qui permet detudier levolution du nombre de
personnes infectees :
y = y (n y).Determiner le nombre de personnes infectees a` un
instant t > 0, avec la donnee initiale y(t0) = y0.
La theorie des E.D.O. est assez riche et le comportement des
solutions tre`s varie (points fixes, attractifs,repulsifs,
attracteurs, points cols, trajectoire periodique, etc...). On
souhaite resoudre des E.D.O. du 1er
ordre a` N variables et decrire des methodes numeriques
permettant de le faire. On tachera dans ce coursdetudier certaines
proprietes de ces methodes dans la plupart des cas :4 la
convergence ; cest la premie`re qualite requise pour un schema
numerique, assurant que la solution
numerique est proche de la solution exacte, selon des crite`res
etablis,Montrer que si un schema eststable et consistant, alors il
est convergent.
4 la precision ; cest la propriete qui etablit le controle de
lerreur entre la solution numerique et la solutionexacte,
4 la complexite de la mise en oeuvre ; lenjeu est de mettre en
oeuvre des methodes numeriques quipeuvent etre implementees avec le
moins de difficultes possibles,
4 la robustesse ; on sinteresse a` des methodes qui ne sont pas
specifiques a` un unique proble`me donne,mais a` des classes de
proble`mes generiques.
De nombreux ouvrages exposent en detail les methodes qui sont
abordees dans ces notes de cours. Signalonsen particulier ceux de
Crouzeix et Mignot [1], Demailly [2] et Schatzman [3].
2 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
1.2 Methodes dEuler (explicite, semi-implicite, implicite)
Soit T > 0, N N et f : R+ RN RN une fonction regulie`re. On
conside`re le proble`me dinconnueu : R+ RN pose par une equation
differentielle ordinaire (E.D.O.) de la forme{ du
dt(t) = f(t, u) t (0, T )
u(0) = u0.
On suppose que f verifie les hypothe`ses de Cauchy-Lipschitz : f
est continue sur [0, T ] RN etL > 0, t [0, T ], (v, w) RN RN ,
|f(t, c) f(t, w)| 6 L |v w|.
On cherche une methode numerique qui permet de construire une
solution numerique proche (en unsens a` preciser) de la solution
exacte (si une telle solution existe !). La strategie consiste a`
decouper unintervalle de temps [0, T ] en intervalles de temps
elementaires [tn, tn+1], avec tn = nh, et a` considererque sur
chaque petit intervalle du/dt est a` peu pre`s constant. Cette
approximation est valable pour tousles schemas numeriques
envisages. En revanche, levaluation du terme f(t, u) sur
lintervalle de temps[tn, tn+1] fait apparatre de nombreuses
possibilites, dont certaines sont discutees ci-apre`s :
Schema dEuler explicite. Cest une methode basee sur une
evaluation directe et explicite (la plussimple) de f(t, u). Elle
consiste a` chercher une approximation Un de u(tn) definie par
:
Un+1 Unh
= f(tn, Un). (1.1)
Un deuxie`me point de vue sur la methode dEuler explicite
consiste a` integrer lequation (1.1) sur [tn, tn+1[,on obtient
u(tn+1) u(tn) = tn+1tn
f(s, u(s)) ds
et la methode dEuler explicite consiste donc a` evaluer le terme
integral par tn+1tn
f(s, u(s)) ds h f(tn, u(tn)).
La methode dEuler explicite peut etre implementee de facon
simple : cest une methode directe dontchaque etape ne necessite que
levaluation de la fonction f . Neanmoins, comme le montre
lexemplesuivant, cette methode peut etre imprecise et ne pas
preserver certaines proprietes fondamentales de lasolution exacte
:
Exemple (Schema dEuler et trajectoire circulaire (1/2))
Considerons le syste`me dE.D.O. : x = y,y = x. Le calcul
suivant
ddt(x2 + y2
)= 2xx + 2yy = 2xy + 2xy = 0 x2 + y2 = Cte.
etablit que les trajectoires sont des cercles. Or,
numeriquement, le schema dEuler explicite secritxn+1 xn
h= yn
yn+1 ynh
= xn
{xn+1 = xn hynyn+1 = yn + hxn
(xn+1)2 + (yn+1)
2 = (1 + h2)(
(xn)2 + (yn)
2).
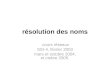
Numeriquement, les trajectoires ne sont plus circulaires (voir
Fig.1) ! Cette propriete est mise en defaut,quelle que soit la
valeur de h choisie (aussi petite soit-elle). Bien quelle soit
facile a` mettre en oeuvre, lamethode dEuler explicite ne permet
pas, dans ce cas, de capter une propriete fondamentale de la
solutionexacte. Cest ce qui peut motiver letude dautres
schemas...
3 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
Euler explicite, h=2pi/20Euler explicite, h=2pi/40Demipoint,
h=2pi/20
Fig. 1 Solution numerique du syste`me x = y, y = x pour la C.I.
(1, 0) avec les methodes dEulerexplicite et du demi-point.
Schema dEuler semi-explicite (ou demi-point). Pour levaluation
du terme integral ci-dessus, onpourrait faire un choix probablement
plus precis avec lapproximation suivante tn+1
tn
f(s, u(s)) ds h f(tn+ 12 , u
(tn+ 12
)) h
2
(f(tn, u(tn)) + f (tn+1, u (tn+1))
).
On propose ainsi le nouveau schema
Un+1 Unh
=12
(f(tn, Un) + f (tn+1, Un+1)
)(1.2)
appele schema semi-implicite (ou point-milieu).
Exemple (Schema dEuler et trajectoire circulaire (2/2)) Pour le
syste`me introduit precedemment x =y, y = x, le schema du point
milieu secrit :
xn+1 xnh
= 12
(yn + yn+1)yn+1 yn
h=
12
(xn + xn+1)
Il preserve la norme et, en consequence, les trajectoires
circulaires (voir Fig.1), quelle que soit la valeurde h choisie.
Par rapport au schema dEuler explicite, cest une amelioration
importante. En revanche, leprix a` payer consiste, a` chaque
iteration, a` resoudre un syste`me lineaire...
4 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
Schema dEuler implicite. Un autre choix consiste a` approcher le
terme integral par tn+1tn
f(s, u(s)) ds h f(tn+1, u(tn+1))
qui conduit a` la methode dEuler implicite (ou retrograde).
Un+1 Un = h f(tn+1, Un+1). (1.3)
Il sagit dune equation a priori non lineaire a` resoudre pour
trouver Un+1. Cette methode est donc pluscompliquee que la methode
explicite. Neanmoins, linteret que lon peut porter a` des methodes
implicitesconcerne la notion de stabilite des methodes. Cette
notion sera developpee dans la section suivante, maisnous en
donnons un apercu a` travers lexemple suivant.
Exemple (Sur la notion de stabilite) Soit > 0 et considerons
lequation :{u = uu(0) = u0 > 0.
Ce proble`me admet la solution u(t) = u0 e t qui satisfait :
t > 0, u(t) > 0 et limt+u(t) = 0.
Etudions la mise en oeuvre des methodes dEuler sur cet exemple
:4 methode explicite : Un = (1 h)n U0.4 methode implicite : Un
=
1(1 + h)n
U0.
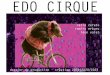
Il apparat alors que la methode explicite fonctionne uniquement
si h est choisi de manie`re adequate :elle est stable sous la
condition 0 < h < 1/ ; si cette condition nest pas
satisfaite, en particulier si1 < h < 2, la solution numerique
peut atteindre des valeurs negatives (voir Fig.2), ce qui na pas
desens physique ! De plus, si h > 2, la solution numerique
oscille entre des valeurs positives et negatives,avec une amplitude
qui augmente : la solution numerique ne tend pas vers 0 lorsque t +
: dans cecas encore, la solution numerique ne respecte pas une
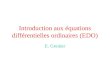
propriete fondamentale de la solution exacte ! Enrevanche, la
methode implicite est inconditionnellementstableau sens ou` il nest
pas necessaire de choisirun pas de temps h sous une contrainte
determinee (voir Fig.3) pour que les deux proprietes
mentionneessoient satisfaites par la solution numerique.
2 Analyse numerique des methodes a` un pas
Soit N N et f : R+ RN RN une fonction regulie`re qui verifie
lhypothe`se de Cauchy-Lipschitz.On sinteresse a` lanalyse des
methodes numeriques permettant de calculer la solution u : R+ RN
delE.D.O.
(P){ du
dt(t) = f(t, u)
u(0) = u0
Dans toute cette partie, | | et designent les normes usuelles
sur R et RN , respectivement. Soith [0, h?]. On choisit une
subdivision de [0, T ]
0 = t0 < t1 < ... < tn < ... < tNh1 < tNh =
T,
et lon pose : n {0, ..., Nh 1}, hn = tn+1 tn, h = supn
hn.
5 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
Sol. num. par Euler explicite, h=1.5Sol. exacte
Fig. 2 Solution numerique de lequation u = u pour la C.I. u(0) =
1 avec la methode dEulerexplicite h = 1.5.
Sol. num. par Euler explicite, h=2.15Sol. exacte
Fig. 3 Solution numerique de lequation u = u pour la C.I. u(0) =
1 avec la methode dEulerimplicite h = 1.5.
6 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
2.1 Definitions (convergence, stabilite, consistance, ordre)
Definition 2.1 (Methode a` un pas)Une methode a` un pas
correspond a` lecriture dun schema numerique sous la forme
(Ph){Un+1 = Un + hn (tn, Un;hn)U0 donne (typiquement, proche de
u0)
avec : R+ RN [0, h?] RN (pour la methode dEuler explicite, (t,
u;h) = f(t, u)).
Definition 2.2 (Convergence dune methode)Lapproximation de (P)
definie par le schema a` un pas (Ph) est dite convergente si,
quelle que soit ladonnee initiale u0,
limU0u0; h0
maxn6Nh
u(tn) Un = 0. ! ! ! Nh augmente lorsque h diminue ! ! !
Cette definition constitue une propriete fondamentale que doit
satisfaire un schema numerique : cettepropriete garantit que la
solution numerique est proche de la solution continue. Par
ailleurs, on nesuppose pas que le schema part de la condition
initiale exacte du syste`me differentiel ; en effet, dunepart, il
peut y avoir une erreur de troncature sur la valeur de la condition
initiale et dautre part, lacondition initiale peut ne pas etre
connue exactement, quelle soit elle-meme le resultat dun calcul,
ouquelle soit obtenue par un procede dechantillonnage. De facon
generale, de meme que la solution dunsyste`me differentiel est
continue par rapport aux donnees initiales, la solution approchee
par un schemaa` un pas doit etre continue par rapport a` une
perturbation des conditions initiales. La convergence dunschema
resulte, comme on va le voir, de deux proprietes :4 la stabilite ;
cest une propriete propre au schema, et qui assure que le schema
namplifie pas trop les
erreurs quon commet a` chaque pas,4 la consistance ; cest une
propriete qui decrit la relation entre le schema et le syste`me
differentiel, et
qui implique que le schema secarte peu localement de la
solution.
Definition 2.3 (Erreur de discretisation, de consistance)On
definit :
4 lerreur de discretisation : en = u(tn) Un,4 lerreur de
consistance : En = u(tn+1) u(tn) hn (tn, u(tn);hn).
Lerreur de consistance est commise en remplacant un dans le
schema par la solution exacte u(tn).
Definition 2.4 (Stabilite)On dit que la methode (Ph) est stable
sil existe M > 0 telle que pour toutes suites Un, Vn, n definies
par{
Un+1 = Un + hn (tn, Un;hn)Vn+1 = Vn + hn (tn, Vn;hn) + n
on a la propriete
maxn6Nh
Un Vn 6MU0 V0+
n6Nhn
.Cela signifie que des erreurs commises a` chaque iteration se
cumulent mais ne degradent pas trop lasolution.
7 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
Definition 2.5 (Consistance)La methode (Ph) est consistante pour
le proble`me (P) si
Nh1n=0
u(tn+1) u(tn) hn (tn, u(tn);hn) =Nh1n=0
En
tend vers 0 lorsque h tend vers 0.
Exemple (Consistance de la methode dEuler explicite) On se place
dans le cas ou` f est supposee (Lt,Lu)-lipschitzienne :
Lt, Lu, (t1, u1), (t2, u2), f(t1, u1) f(t2, u2) 6 Lt |t1 t2|+
Luu1 u2.La generalisation sous lhypothe`se (moins restrictive) de
Cauchy-Lipsschitz, est disponible dans [3] ainsique comme une
application immediate du Lemme 2.7 qui sera demontre plus loin.
Pour la methode dEulerexplicite, on a
Nh1n=0
En =Nh1n=0
u(tn+1) u(tn) hn f(tn, u(tn))
=Nh1n=0
tn+1tn
(f(t, u(t)) f(tn, u(tn))) dt
6Nh1n=0
tn+1tn
(Lt |t tn|+ Lu u(t)) u(tn)
)dt
6Nh1n=0
(h2n Lt + h2n Lu sup
[t0,tNh ]
u(t))
6 hT(Lt + Lu sup
[t0,tNh ]
u(t))
et la methode est consistante.
Definition 2.6 (Ordre dune methode)La methode est dordre p
lorsque
Nh1n=0
u(tn+1) u(tn) hn (tn, u(tn);hn) = O(hp), u Cp+1([0, T ]).
(la methode dEuler est dordre 1)
2.2 Principaux resultats danalyse numerique
Lemme 2.7 (CNS de consistance)Une methode est consistante si et
seulement si
(t, y; 0) = f(t, y) t [0, T ], y RN
Preuve. Posons En = y(tn+1) y(tn) hn (tn, y(tn);hn). Dapre`s la
formule des accroissements finis, ilexiste cn ]tn, tn+1[ tel que
:
En = hn (f(cn, y(cn)) (tn, y(tn);hn)) .En posant
n = hn (f(cn, y(cn)) (cn, y(cn); 0)) , n = (cn, y(cn); 0) (tn,
y(tn);hn),
8 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
on obtientEn = n + hn n.
Dune part, la fonction t 7 |f(t, y(t)) (t, y(t); 0)| est
continue, donc integrable au sens de Riemann, eton en deduit :
limh0
n
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
Theore`me 2.10 (Convergence dordre p)Soit U0 = u0. Si une
methode est stable et dordre p, et si f Cp([0, T ] R), alors
maxn6Nh
|Un u(tn) 6M hp.
Preuve. Le resultat est une consequence des definitions de la
stabilite et de lordre.
maxn6Nh
Un u(tn) 6MU0 u0+
n6NhEn
et n6Nh
En 6 C hp.
3 Methodes de Runge-Kutta
Il sagit ici de trouver des methodes plus precises que la
methode dEuler mais qui soient toujours desmethodes a` un pas. En
particulier, on cherchera des methodes dordre p en supposant que f
Cp+1([0, T ]RN ).
3.1 Principe general des methodes de Runge-Kutta
Une methode nave (et couteuse !). Un moyen simple pour
construire une methode dordre p estdutiliser une methode de
Taylor
(t, u;h) = f(t, u) +h
2f (1)(t, u) + ...+
hp1
p!f (p1)(t, u).
Naturellement, verifie les hypothe`ses du Theore`me 2.9 et
permet de construire une methode dordre p.De plus, on peut voir que
cette methode est stable si, par exemple, f Cp([0, T ]RN ).
Neanmoins, ellepresente un inconvenient majeur qui est la necessite
dutiliser (de calculer) non pas une fonction f maisp fonctions (f
(0), ..., f (p1)). En pratique, ce calcul peut etre couteux surtout
si f depend de parame`tres.On cherche donc des methodes ne
necessitant que levaluation de f .
Methodes de quadrature (Runge-Kutta). Lidee est dessayer
devaluer u en des temps interme-diaires grace a` des formules de
quadrature. Pour cela, cherchons a` interpreter les formules
introduitesprecedemment : si on reecrit le syste`me
differentiel
dudt
= f(t, u)
sous forme integrale entre tj et tj+1, on obtient
u(tj+1) = u(tj) + tj+1tj
dudt
(s) ds.
On peut donc obtenir une approximation de u(tj+1) u(tj) en
utilisant une formule de quadrature ; si onutilise la formule des
rectangles a` gauche, on aura
u(tj+1) u(tj) ' hj dudt (tj),
ce qui nous conduit au schema dEuler explicite. En utilisant la
formule des rectangles a` droite, on a
u(tj+1) u(tj) ' hj dudt (tj+1),
10 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
ce qui nous conduit au schema dEuler implicite. Enfin, en
utilisant une formule avec comme noeuds lesextremites de
lintervalle, on ecrit :
u(tj+1) u(tj) ' hj(
dudt
(tj) + dudt
(tj+1)).
Pour quune telle formule soit dordre 0 en tant que formule
dintegration, il faut que + = 1. On tombedonc sur la methode ; le
cas = 1/2 qui est la formule des trape`zes conduit a` la methode de
Crank-Nicholson (ou point-milieu), qui est la plus precise. Pour
fabriquer des schemas fondes sur des formulesdintegration, on
raisonne comme suit : on se donne q noeuds cj appartenant a` [0,
1], distincts ou non,ranges par ordre croissant et des formules de
quadrature 1
0
f(t) dt 'qj=1
bj f(cj) (3.1)
ci0
f(t) dt 'qj=1
aij f(cj). (3.2)
La formule de quadrature (3.2) diffe`re un peu des formules de
quadrature classiques en ce quelle faitintervenir des points situes
a` lexterieur de lintervalle dintegration (notamment si aij 6= 0
pour j > i).Il ny a pas de difficulte nouvelle quand on fait
cette hypothe`se. Une formule de Runge-Kutta consiste a`construire
une approximation basee sur ces formules de quadrature, i.e. si on
pose tk,i = tk + ci hk,
Uk,i = Uk + hkqj=1
aij f(tk,j , Uk,j) (3.3)
Uk+1 = Uk + hkqj=1
bj f(tk,j , Uk,j) (3.4)
Un point de vue identique mais lege`rement different dans la
forme revient a` evaluer le terme integral dela manie`re suivante
:
(i) u(tn,i) = u(tn) + tn,itn
f(s, u(s)) ds ' u(tn) + hnqj=1
aij f(tn,j , u(tn,j)),
(ii) u(tn+1) = u(tn) + tn+1tn
f(s, u(s)) ds ' u(tn) + hnqj=1
bj f(tn,j , u(tn,j)),
et les methodes de Runge-Kutta consistent consistent alors a`4
remplacer les approximations par des egalites,4 ajuster les aij ,
bj de facon a` pouvoir calculer facilement et a` avoir un ordre
donne.
(i) Un,i = Un + hnqj=1
aij f(tn,j , Un,j), i = 1, ..., q
(ii) Un+1 = Un + hnqj=1
bj f(tn,j , Un,j)
Les Un,i sont calcules par (i), et Un+1 est evalue grace a` (ii)
et aux Un,i calcules precedemment. Ainsi,un schema de Runge-Kutta
est entie`rement determine par ses coefficients que lon peut
representer sousla forme dun tableau (voit Tab.1).
On remarque que les relations (3.3) permettent de determiner les
Uk,j explicitement si les aij sont nulspour j > i. Si les aij
sont nuls pour j > i mais certains des aii ne le sont pas, la
methode est dite semi-implicite, car on peut resoudre tour a` tour
chacune des equations (3.3) par une technique de
resolutiondequations non lineaires. Enfin, sil y a des couples (i,
j) avec j > i pour lesquels aij nest pas nul, (3.3)forme un
syste`me de Nq equations non lineaires couplees.
11 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
c1 a11 a12 a1qc2 a21 a22 a2q...
......
...cq aq1 aq2 aqq
b1 b2 bqTab. 1 Tableau des coefficients dune methode de
Runge-Kutta.
3.2 Methodes de Runge-Kutta usuelles
Les methodes etant entie`rement determinees par le tableau de
leurs coefficients, nous indiquons ici cellesqui sont le plus
couramment utilisees.
4 Methode dEuler explicite.
0 01 1
4 Methode du point milieu.
0 1 01 0 1
1 1/2 1/2
4 Methode RK4.
0 0 0 0 01/2 1/2 0 0 01/2 0 1/2 0 01 0 0 1 0
1 1/6 1/3 1/3 1/6
4 Methode dEuler implicite.
1 11 1
4 Methode de Heun.
0 0 01 1 0
1 1/2 1/2
4 Methode -implicite.
1 1 2
1/2 1/2
avec, pour la methode -implicite, =12
+1
2
3.
Par exemple, si lon sinteresse a` la methode de Heun, la
construction de la solution se fait de la manie`resuivante :
tn,1 = tn : un,1 = Un12
tn,2 = tn + hn : Un,2 = Un + hn f(tn,1, Un,1)12
tn+1 : Un+1 = Un + hn
(12f(tn,1, Un,1) +
12f(tn,2, Un,2)
)12
= Un + hn
(12f(tn, Un) +
12f (tn+1, Un + hnf(tn, Un))
)Lexpression finale de Un+1 en fonction de Un est ici obtenue de
manie`re explicite car la methode deHeun est explicite. Le calcul
ne necessite que levaluation de la fonction f (a` plusieurs
reprises) : enconsequence, non seulement cette methode est facile
a` implementer, mais surtout elle est valable pourtoute fonction f
suffisamment regulie`re. Au contraire, la methode basee sur les
developpements de Taylornecessite levaluation des derivees de f ce
qui, en pratique, peut se reveler couteux si f depend de
plusieursparame`tres et que lon modifie ces parame`tres...
12 c S. Martin
-
Agregation Externe de MathematiquesUniversite Paris-Sud 11
Epreuve de ModelisationOption calcul scientifique
Theore`me 3.1 (Ordre dune methode de RK)La methode de
Runge-Kutta est4 dordre 1 si et seulement si
j bj = 1,
4 dordre 2 si et seulement si elle satisfait en outrej bj cj =
1/2 dune part et
j (bj
i aji) = 1/2
dautre part.
Preuve. Les methodes de Runge-Kutta sont construites de la
manie`re suivante :
Uj(t, u, h) = u+ hi
ajif(t+ h ci, Ui(t, u, h))
(t, u;h) =j
bj f(t+ h cj , Uj(t, u, h))
avec la propriete suivante :limh0
Ui(t, u, h) = u.
Or, une methode est dordre 1 si et seulement si (t, u; 0) = f(t,
u). Par continuite de f , on obtient :
(t, u; 0) =j
bj f(t, u),
ce qui etablit lequivalence. Par ailleurs, une methode est de
plus dordre 2 si /h(t, u; 0) = (1/2) f (1)(t, u).Apre`s calculs, on
obtient :
h(t, u;h) =
j
bj
(cjf
t(t, Uj(t, u, h)) +
f
u(t, Uj(t, u, h))
Ujh
(t, u, h)),
Ujh
(t, u, h) =i
ajif(t+ h ci, Ui(t, u, h)) + h
h
(i
ajif(t+ h ci, Ui(t, u, h))
).
Par passage a` la limite sur h (les fonctions etant regulie`res
et bornees), on obtient
h(t, u; 0) =
j
bj cjf
t(t, u) +
j
(bji
aji
)f
u(t, u) f(t, u)
et on obtient ainsi la CNS proposee. La methode dEuler
(implicite, explicite ou point milieu) est dordre 1, la methode de
Heun dordre 2, lamethode -implicite dordre 3, la methode de RK
classique dordre 4. On peut continuer a` deriver ainside suite des
CNS et calculer les coefficients (bj), (aij), (cj) en fonction de
ces conditions. Mentionnonstoutefois quil ne sert a` rien dutiliser
une methode precise (dordre 4) si f ou u nest pas 5 fois
differentiable(on naura pas, en tout cas, lordre prevu).
References
[1] M. Crouzeix et A. Mignot. Analyse numerique des equations
differentielles. Masson, 1984.
[2] J.-P. Demailly. Analyse numerique et equations
differentielles. edp Sciences, 1996.
[3] M. Schatzman. Analyse numerique : une approche mathematique.
Dunod, 2002.
13 c S. Martin
Introduction la discrtisation des E.D.O.Quelques exemples
d'E.D.O.Mthodes d'Euler (explicite, semi-implicite, implicite)
Analyse numrique des mthodes un pasDfinitions (convergence,
stabilit, consistance, ordre)Principaux rsultats d'analyse
numrique
Mthodes de Runge-KuttaPrincipe gnral des mthodes de
Runge-KuttaMthodes de Runge-Kutta usuelles