Embed Size (px)
Citation preview
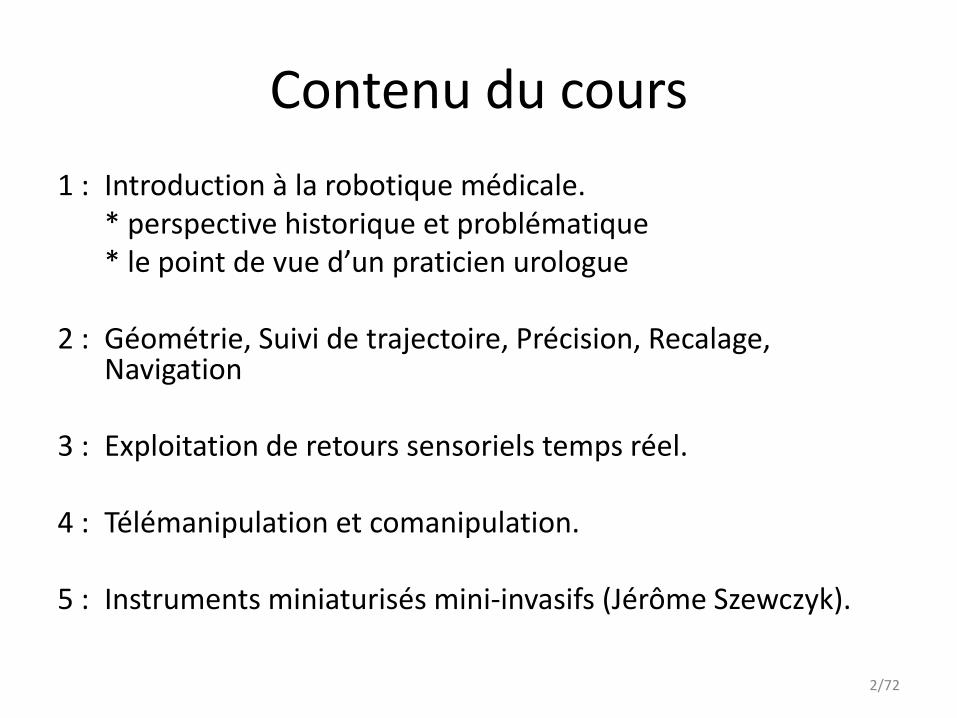
Contenu du cours
1 : Introduction à la robotique médicale. * perspective historique et problématique * le point de vue d’un praticien urologue 2 : Géométrie, Suivi de trajectoire, Précision, Recalage,
Navigation 3 : Exploitation de retours sensoriels temps réel. 4 : Télémanipulation et comanipulation. 5 : Instruments miniaturisés mini-invasifs (Jérôme Szewczyk).
2/72
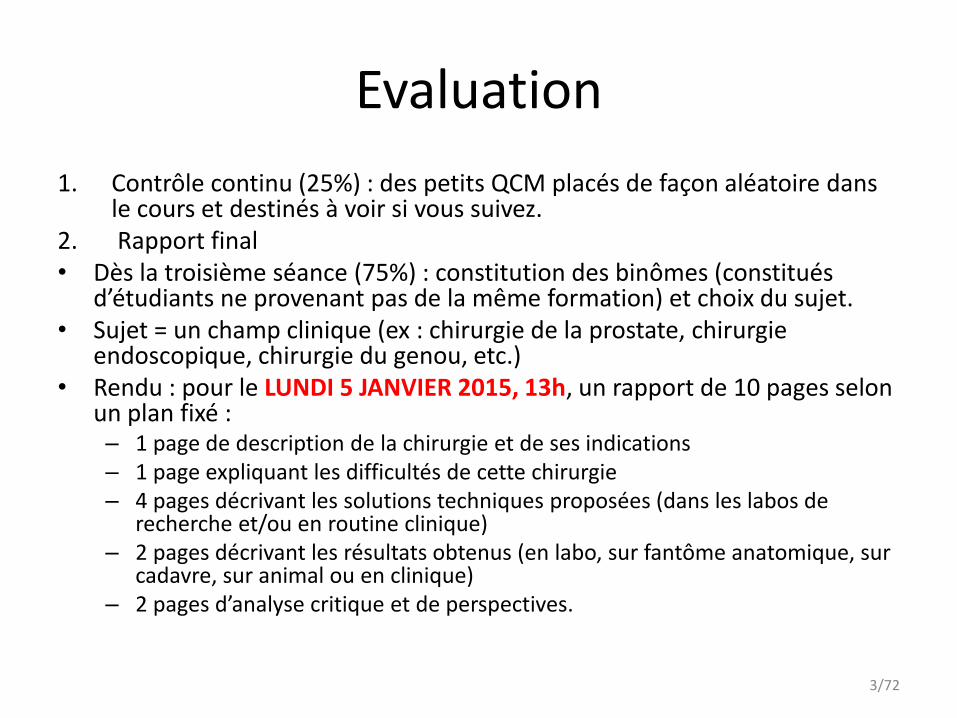
Evaluation
1. Contrôle continu (25%) : des petits QCM placés de façon aléatoire dans le cours et destinés à voir si vous suivez.
2. Rapport final • Dès la troisième séance (75%) : constitution des binômes (constitués
d’étudiants ne provenant pas de la même formation) et choix du sujet. • Sujet = un champ clinique (ex : chirurgie de la prostate, chirurgie
endoscopique, chirurgie du genou, etc.) • Rendu : pour le LUNDI 5 JANVIER 2015, 13h, un rapport de 10 pages selon
un plan fixé : – 1 page de description de la chirurgie et de ses indications – 1 page expliquant les difficultés de cette chirurgie – 4 pages décrivant les solutions techniques proposées (dans les labos de
recherche et/ou en routine clinique) – 2 pages décrivant les résultats obtenus (en labo, sur fantôme anatomique, sur
cadavre, sur animal ou en clinique) – 2 pages d’analyse critique et de perspectives.
3/72
Horaires et salles
• Les vendredis, 8h30-10h30, Amphi 55B, du 12/09 au 31/10
• Les jeudis, 13h45-15h45, Amphi 55A, du 6/11 au 18/12
• ATTENTION :
– Le 19/09 : cours fait par le Dr Pierre Mozer, Service d’urologie de la Pitié Salpêtrière.
– Le 26/09 : cours annulé.
4/72
SUJETS DE PROJET
1. Chirurgie cardiaque à ciel ouvert 2. Chirurgie intra cardiaque. 3. Intra vasculaire (cathéters, stents, etc.) 4. Genou. 5. Vertèbres. 6. Prostate : Biopsies et brachythérapie. 7. Foie. 8. Cholécystectomie. 9. Neurochirurgie : cerveau. 10. Radiothérapie (incl. Protonthérapie). 11. Cordes vocales. 12. Oreille. 13. Œil. 14. Endoscopie et endomicroscopie. 15. Prostatectomie radicale. 16. Hystérectomie. 17. Un sujet de votre choix, sous réserve de validation par l’enseignant
5/72
Chapitre 1 : introduction à la robotique médicale
• Dans ce cours on parle de robotique pour les gestes interventionnels et la chirurgie.
• Les robots sont des manipulateurs (on parlera de robots mobiles de façon anecdotique).
6/72
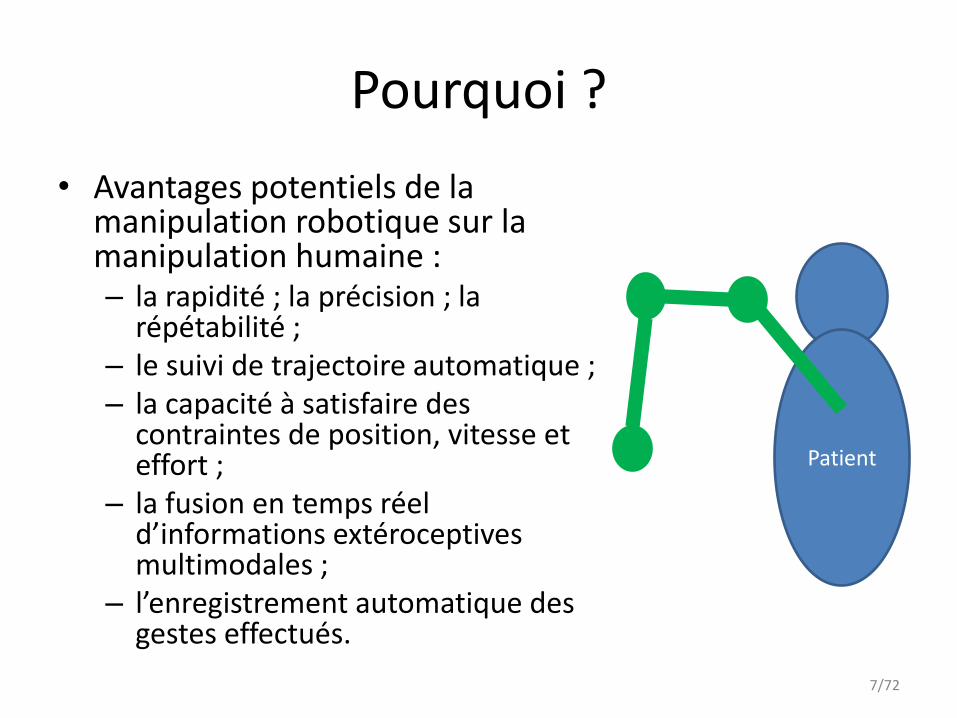
Pourquoi ?
• Avantages potentiels de la manipulation robotique sur la manipulation humaine : – la rapidité ; la précision ; la
répétabilité ; – le suivi de trajectoire automatique ; – la capacité à satisfaire des
contraintes de position, vitesse et effort ;
– la fusion en temps réel d’informations extéroceptives multimodales ;
– l’enregistrement automatique des gestes effectués.
Patient
7/72
Mais :
• Avantages de l’homme sur le robot : – la capacité d’analyse d’une situation et de prise de
décision ;
– la faculté d’adaptation, voire d’«improvisation» ;
– la capacité d’entraînement et de formation ;
– l’intégration d’informations complexes de sources multiples.
Garder autant que possible le praticien dans la boucle.
8/72
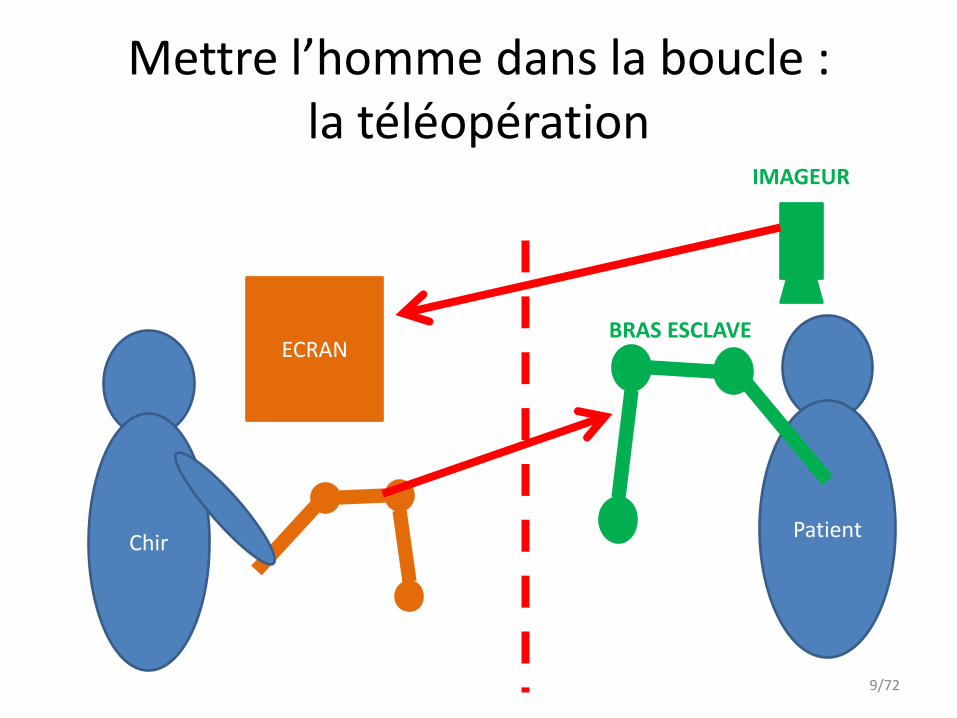
Mettre l’homme dans la boucle : la téléopération
Patient
ECRAN
Chir
BRAS ESCLAVE
IMAGEUR
9/72
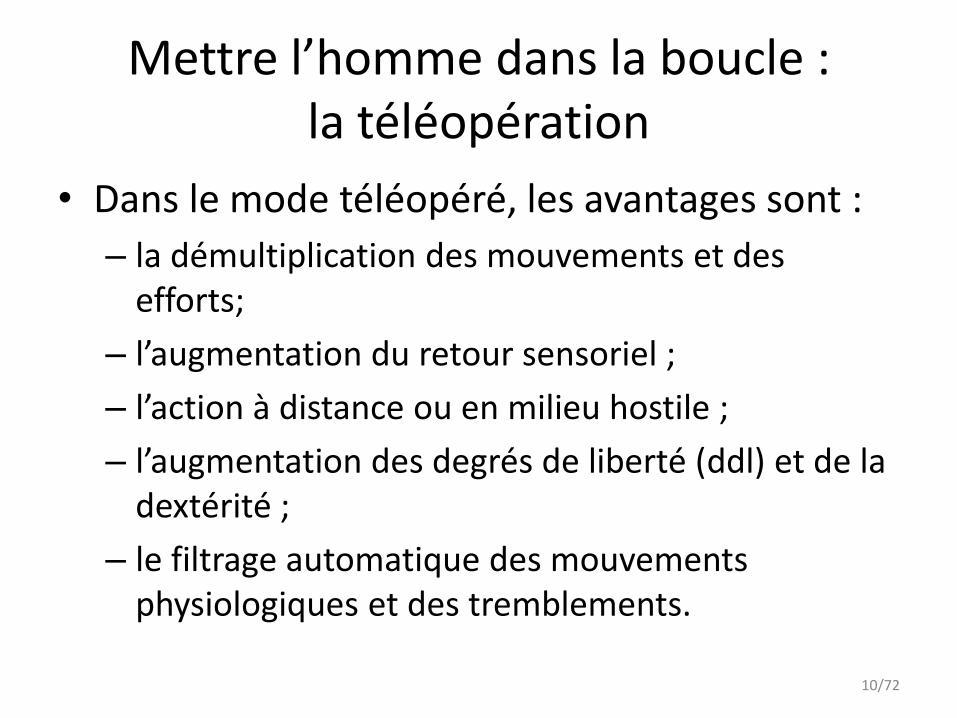
Mettre l’homme dans la boucle : la téléopération
• Dans le mode téléopéré, les avantages sont :
– la démultiplication des mouvements et des efforts;
– l’augmentation du retour sensoriel ;
– l’action à distance ou en milieu hostile ;
– l’augmentation des degrés de liberté (ddl) et de la dextérité ;
– le filtrage automatique des mouvements physiologiques et des tremblements.
10/72
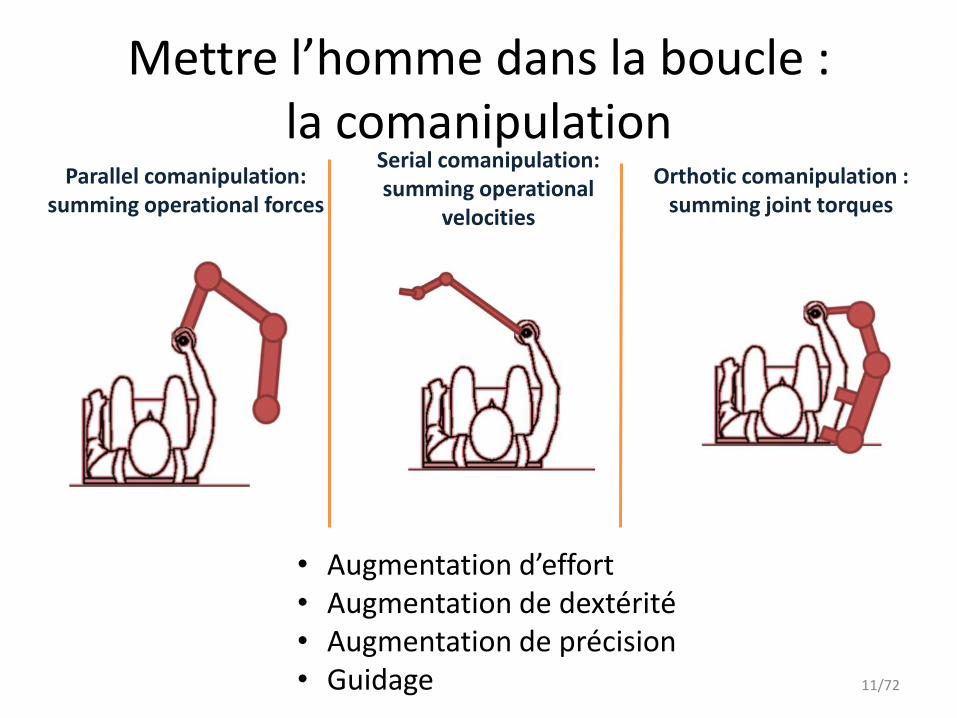
Mettre l’homme dans la boucle : la comanipulation
Parallel comanipulation: summing operational forces
Serial comanipulation: summing operational
velocities
Orthotic comanipulation : summing joint torques
• Augmentation d’effort • Augmentation de dextérité • Augmentation de précision • Guidage 11/72
Spécificités de la robotique médicale
• Lire le livre : La robotique médicale, éd : J. Troccaz, chez Hermès.
• Contraintes : – Sécurité à proximité du patient et des soignants – Stérilité – Salle d’opération
• Difficulté de validation : – Preuve du service médical rendu. – Faisabilité technico économique. – Facteurs humains.
• Contraintes règlementaires : Marquage CE et/ou FDA approval.
12/72
Sécurité pour le patient et les soignants
• Zéro « accident » toléré. • Il faut au minimum :
– un médecin dans la boucle ; – des protocoles précis d’utilisation bien documentés avec une formation adéquate du
personnel médical ; – des interfaces homme-machine intuitives, ergonomiques et sans ambiguïtés ; – des procédures d’initialisation automatique ; – des procédures de débrayage et de reprise manuelle de l’intervention ; – des architectures robotiques intrinsèquement sécurisées ; – des fusibles mécaniques si les efforts peuvent être importants ; des fusibles électriques ; – une redondance de capteurs ; – une limitation de l’espace de travail, de la vitesse et des efforts ; – des procédures de test logiciel du bon fonctionnement de tous les composants ; – des procédures de validation pas à pas de la bonne exécution de toutes les étapes du
traitement médical ; – une modification de la procédure médicale qui n’ait pas d’impact sur la santé du patient
(durée de l’anesthésie par exemple).
13/72
Stérilité
• Toutes les parties en contact avec le patient ou le chirurgien doivent être : – Stérilisables, selon différents procédés, principalement :
• Autoclave : stérilisation à la vapeur d’eau – 134° / 18 minutes.
• STERRAD: Le procédé Sterrad® (Johnson & Johnson division ASP®) utilise comme agent stérilisant le peroxyde d’hydrogène, au cours d’un cycle comportant une phase plasma. Le cycle se déroule à basse température (50°C) ; il permet de stériliser certains dispositifs médicaux thermosensibles, sous réserve des limites d’utilisation de cette méthode.
– Jetables sous conditionnement stérile.
– Sous emballage stérile.
14/72
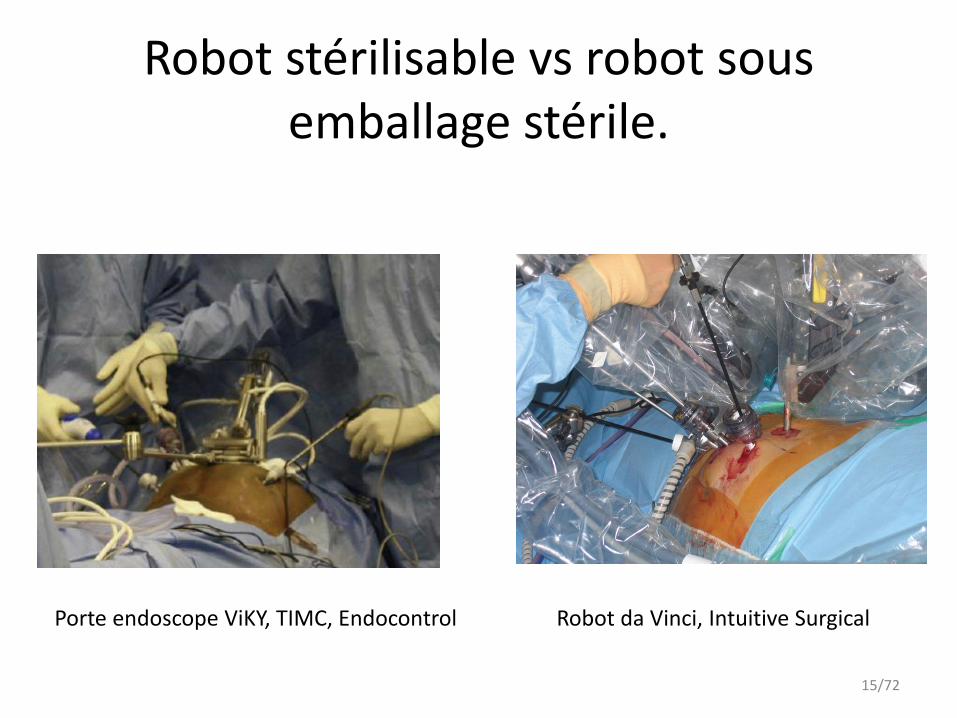
Robot stérilisable vs robot sous emballage stérile.
Porte endoscope ViKY, TIMC, Endocontrol Robot da Vinci, Intuitive Surgical
15/72
Contraintes techniques liées à la salle d’opération
• Réduire l’encombrement au maximum ; • Rendre autant que possible « perceptible » l’espace de travail (par
exemple en utilisant une architecture de type SCARA) ; • Pouvoir déplacer et installer facilement le système robotique et son
contrôleur, de préférence par une seule personne ; • Pouvoir facilement faire entrer et sortir du bloc opératoire le système
robotique ; • Définir des procédures précises de rangement et d’entretien des
accessoires ; • Assurer une maintenance préventive ; • Prévoir une gestion efficace des pannes ; • Assurer une compatibilité électrique et magnétique avec les autres
équipements (tests réglementaires) ; • Éviter de devoir faire appel à un personnel spécialisé supplémentaire, etc.
16/72
Facteurs de réussite
• Réussite : – Technique – Médicale – Clinique – Commerciale
• Pour l’ingénieur/ le chercheur, il faut se demander, a minima, si : 1. Le projet s’appuie sur une expertise médicale de qualité 2. le prototype a des chances raisonnables de devenir un système certifiable
(voir plus loin); 3. le système robotique va objectivement permettre l’amélioration du geste
pratiqué par le médecin ; 4. cette amélioration est potentiellement significative pour le patient ou pour
le personnel médical. 5. Sans parler des facteurs humains.
Il faut bien le dire : très peu de réussites à ce jour !
17/72
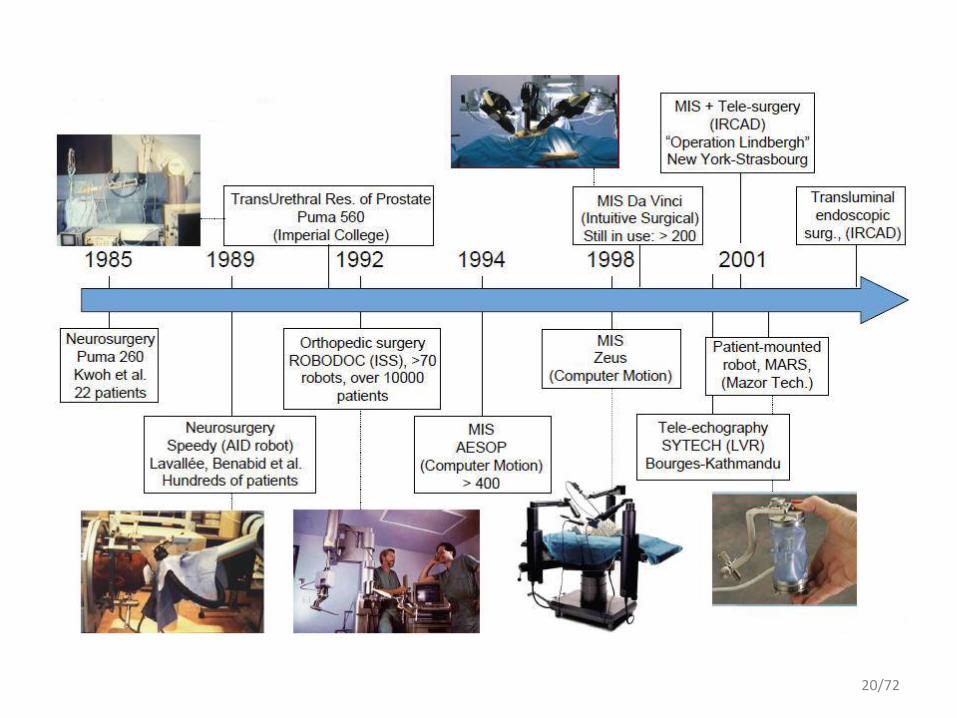
« historique »
• Phase 1 : Milieu des années 1980 : des premiers fous utilisent des robots industriels pour positionner précisément des instruments de chirurgie, notamment en chirurgie du cerveau, par couplage avec un système de navigation. Dans les années 1990, développement de ce concept en chirurgie orthopédique (hanche, genou, colonne vertébrale).
• Phase 2 : Milieu des années 1990, chirurgie minimalement invasive (laquelle s’est développée, en pratique manuelle dans les années 1980). Systèmes téléopérés destinées à augmenter la dextérité et le confort du chirurgien.
18/72
« historique »
• Depuis dix ans, grande diversification : – Dispositifs compacts, dédiés – Robotique « à l’intérieur du patient » – N.O.T.E.S (natural orifice transluminal endoscopic surgery) – Cathéterisme actif, endoscopie et instrumentation dextre, – Compensation des mouvements physiologiques :
• Respiratoires • Cardiaques.
• et prise en compte de nouveaux aspects : – Avènement de l’interaction physique homme robot comme un
sujet central en robotique (pas seulement en chirurgie) – Facteurs humains.
19/72
20/72
Principales applications
• la chirurgie de la tête et du cou (neurochirurgie, chirurgie maxillo-faciale, chirurgie dentaire) ;
• la chirurgie orthopédique ; • la chirurgie mini-invasive du thorax et de
l’abdomen (cardiaque, cardiovasculaire, générale, urologique, gynécologique, etc.) ;
• la radiologie interventionnelle et les procédures percutanées ;
• L’assistance à l’examen échographique ; • la radiothérapie et la radiologie de diagnostic.
21/72
1. Chirurgie de la tête et du cou
• Plus précisément : neurochirurgie stéréotaxique ou conventionnelle, chirurgie ophtalmologique, chirurgie oto-rhino-laryngologique (ORL), chirurgie maxillo-faciale, chirurgie dentaire.
• Grande précision, soit dans le positionnement des outils par rapport à l’anatomie du patient, soit dans la manipulation de fragments osseux (découpe, repositionnement).
• Microchirurgie (chirurgie sous microscope) ou endoscopie.
22/72
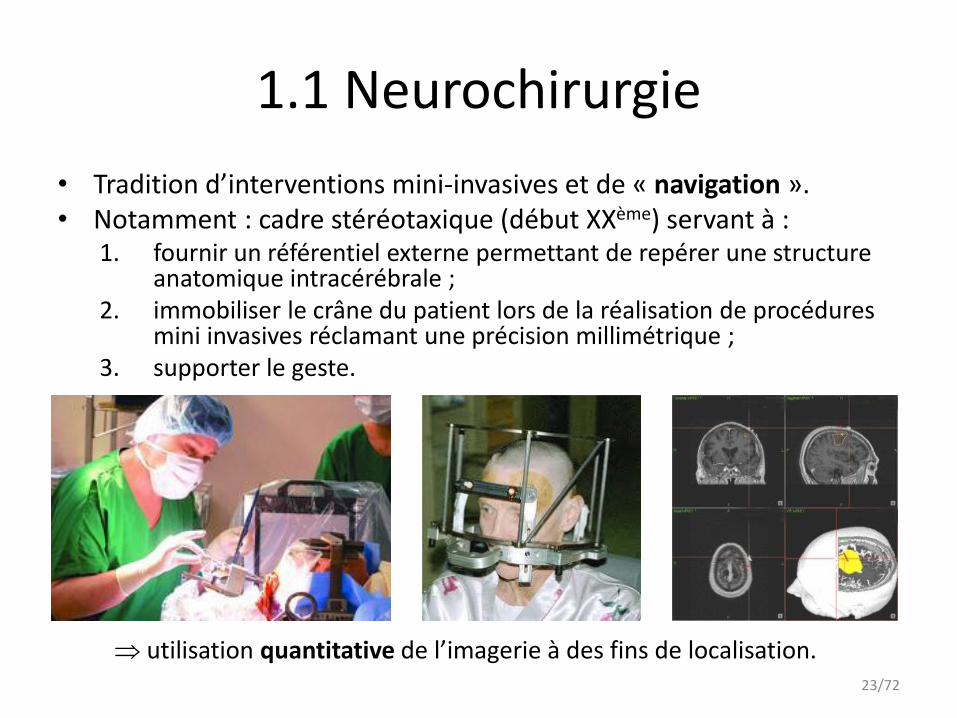
1.1 Neurochirurgie
• Tradition d’interventions mini-invasives et de « navigation ». • Notamment : cadre stéréotaxique (début XXème) servant à :
1. fournir un référentiel externe permettant de repérer une structure anatomique intracérébrale ;
2. immobiliser le crâne du patient lors de la réalisation de procédures mini invasives réclamant une précision millimétrique ;
3. supporter le geste.
•
utilisation quantitative de l’imagerie à des fins de localisation. 23/72
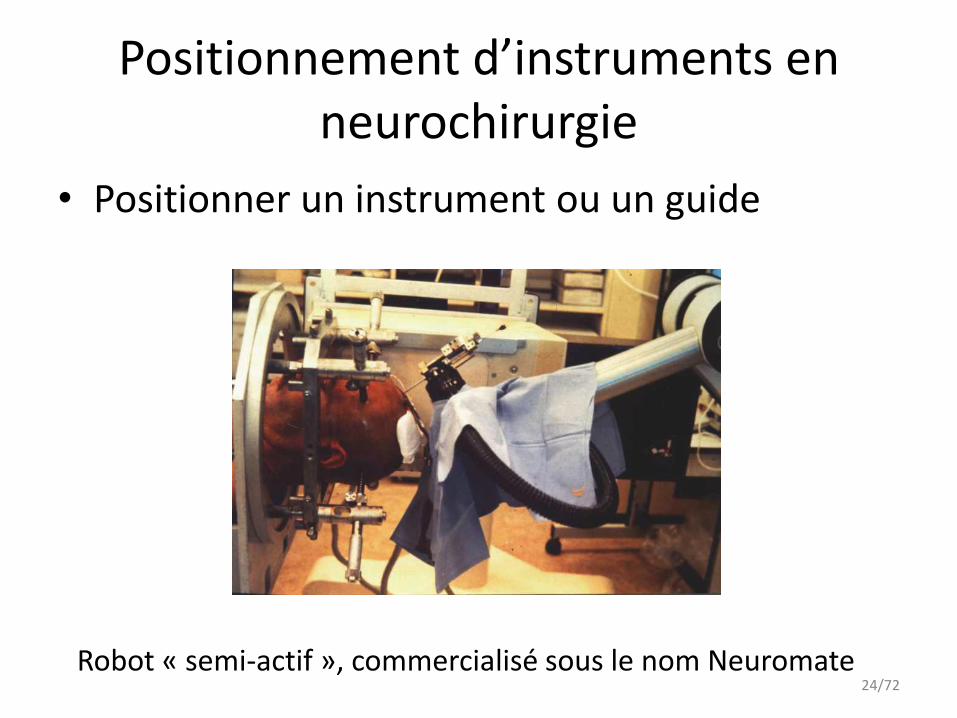
Positionnement d’instruments en neurochirurgie
• Positionner un instrument ou un guide
Robot « semi-actif », commercialisé sous le nom Neuromate 24/72
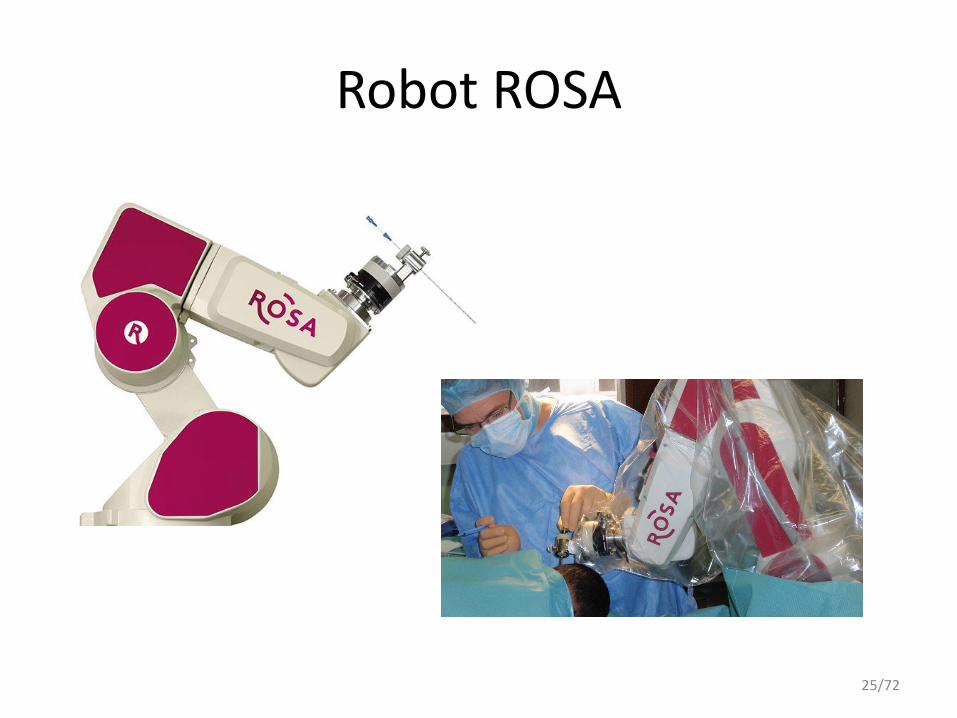
Robot ROSA
25/72
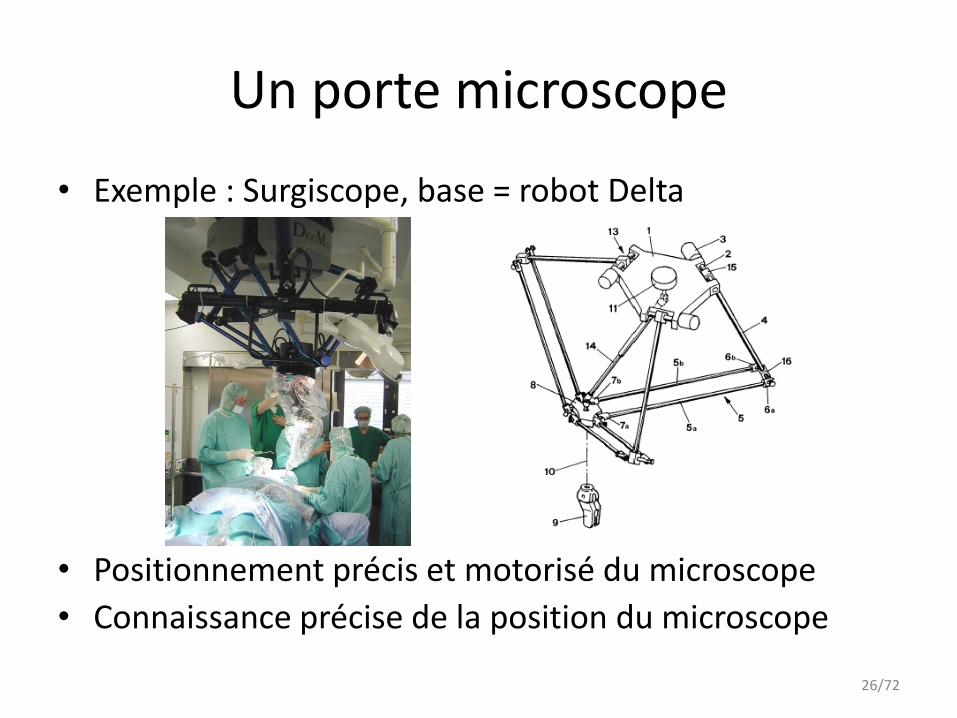
Un porte microscope
• Exemple : Surgiscope, base = robot Delta
• Positionnement précis et motorisé du microscope
• Connaissance précise de la position du microscope
26/72
Limitations et évolutions récentes
• Grande efficacité des navigateurs en neurochirurgie, plus simples, moins coûteux.
• Porte microscope : rapport bénéfice / coût défavorable.
• Systèmes sous IRM (imagerie per opératoire), comme NeuroArm.
• Instruments dextres miniatures (Neurobot)
27/72
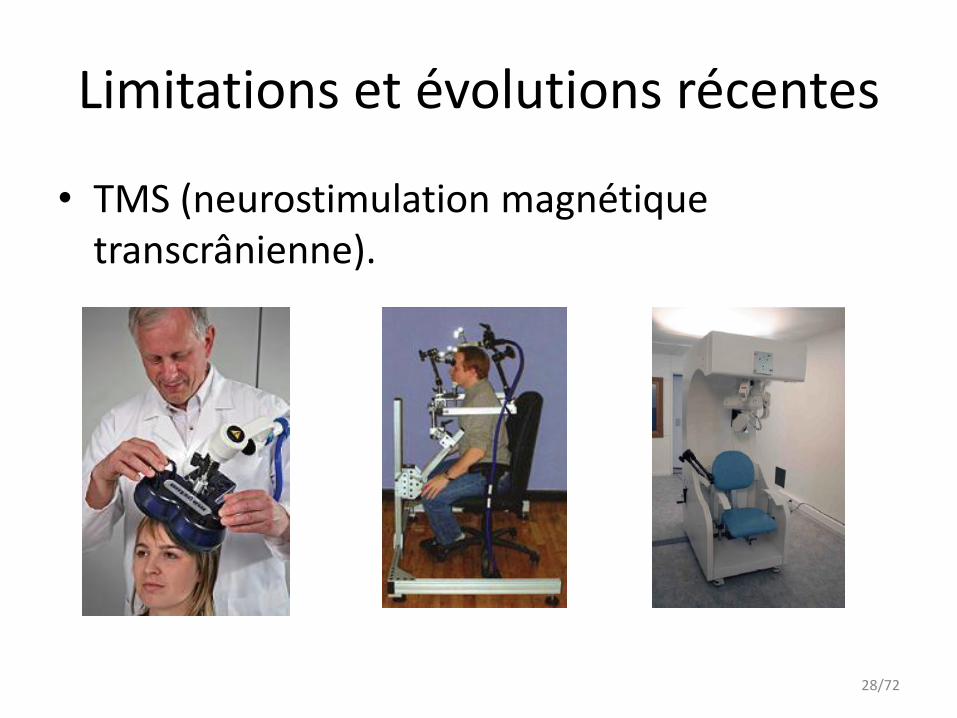
Limitations et évolutions récentes
• TMS (neurostimulation magnétique transcrânienne).
28/72
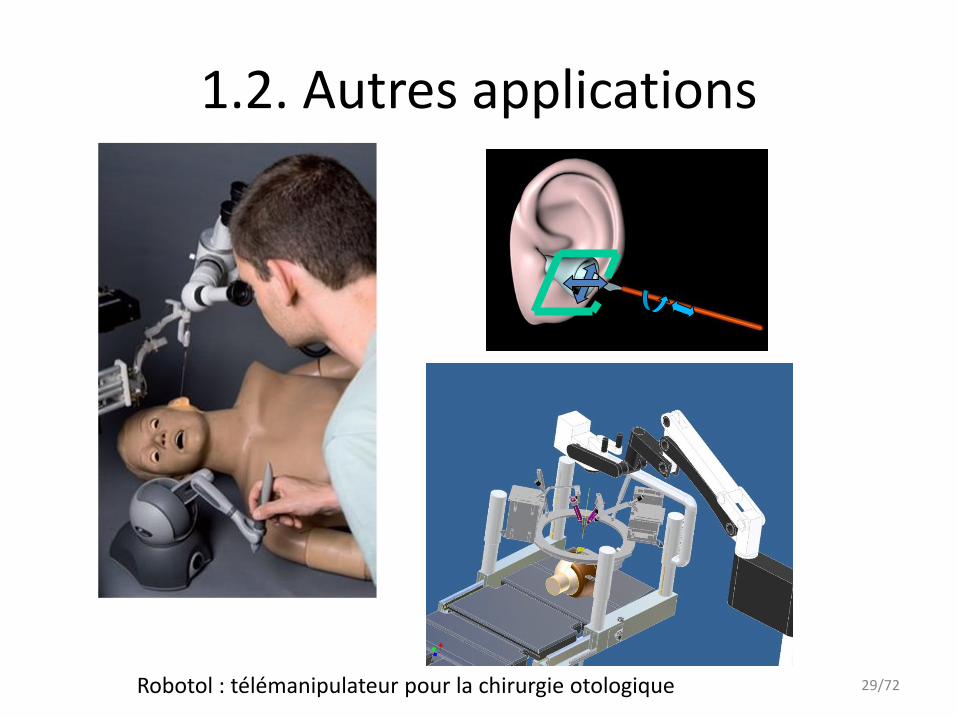
1.2. Autres applications
Robotol : télémanipulateur pour la chirurgie otologique 29/72
Chirurgie opthalmologigue
• Chirurgie de la cornée (découpe, transplantaion)
30/72
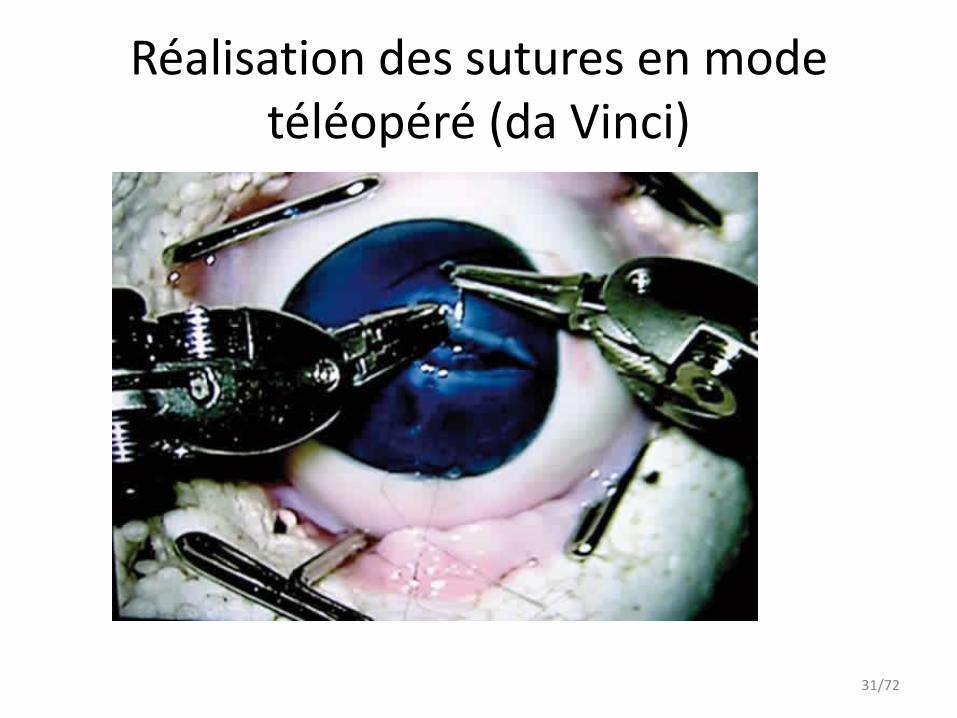
Réalisation des sutures en mode téléopéré (da Vinci)
31/72
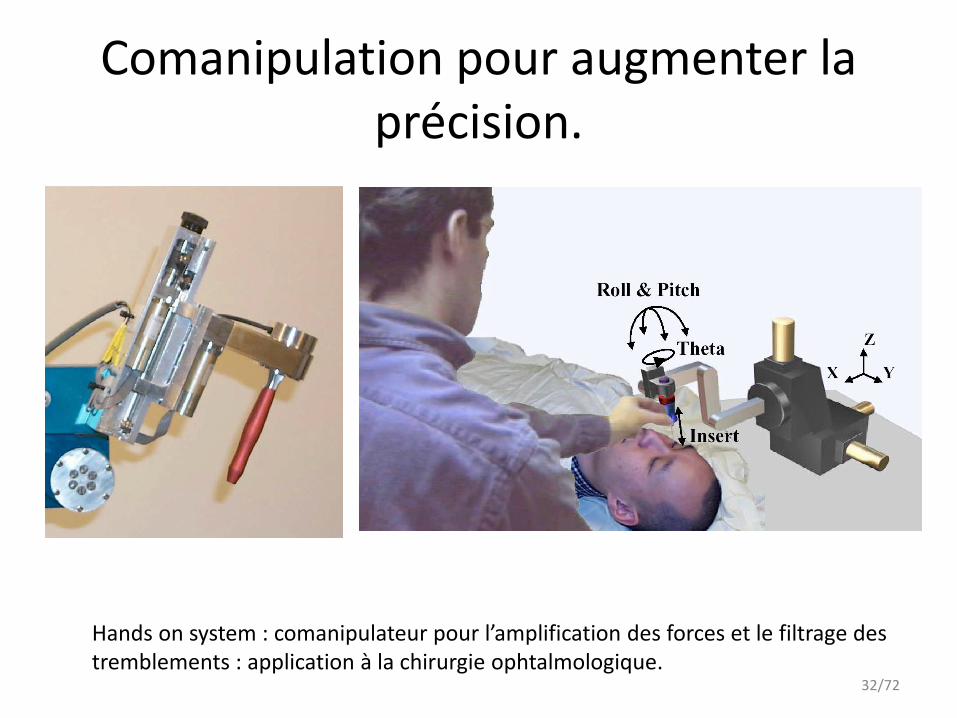
Comanipulation pour augmenter la précision.
Hands on system : comanipulateur pour l’amplification des forces et le filtrage des tremblements : application à la chirurgie ophtalmologique.
32/72
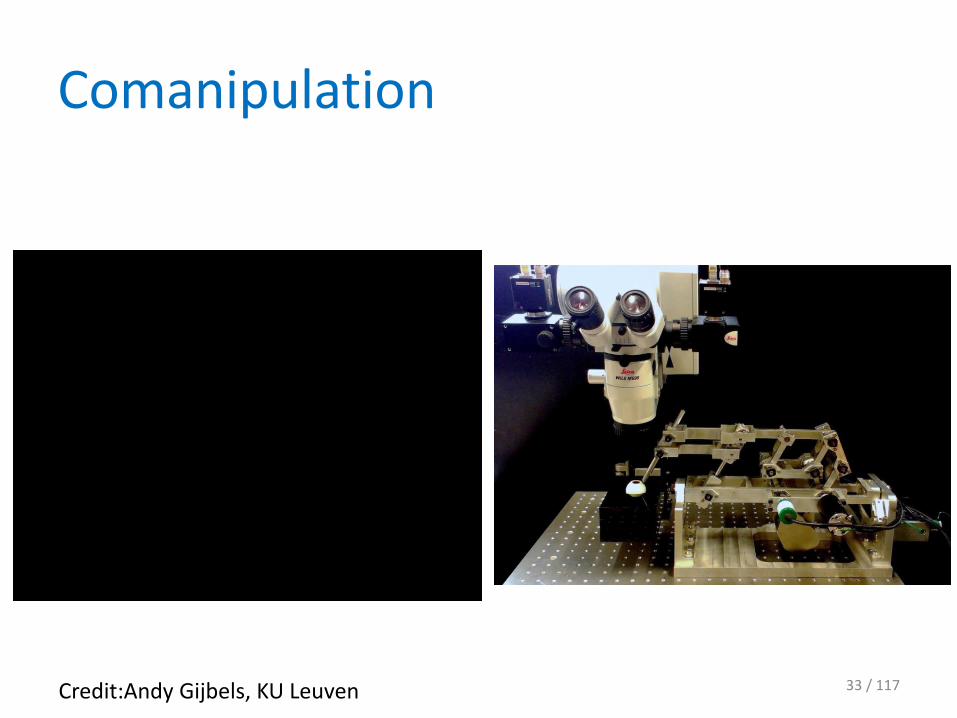
Comanipulation
Credit:Andy Gijbels, KU Leuven
33 / 117
2. Chirurgie orthopédique
• Squelette : membres, bassin, rachis, articulations.
• Parmi les disciplines pionnières.
• Nombreux points communs avec les problèmes de robotique conventionnelle :
– Procédé = usinage (découpe, fraisage, perçage).
– Immobilisation souvent possible des os.
– Corps rigides.
34/72
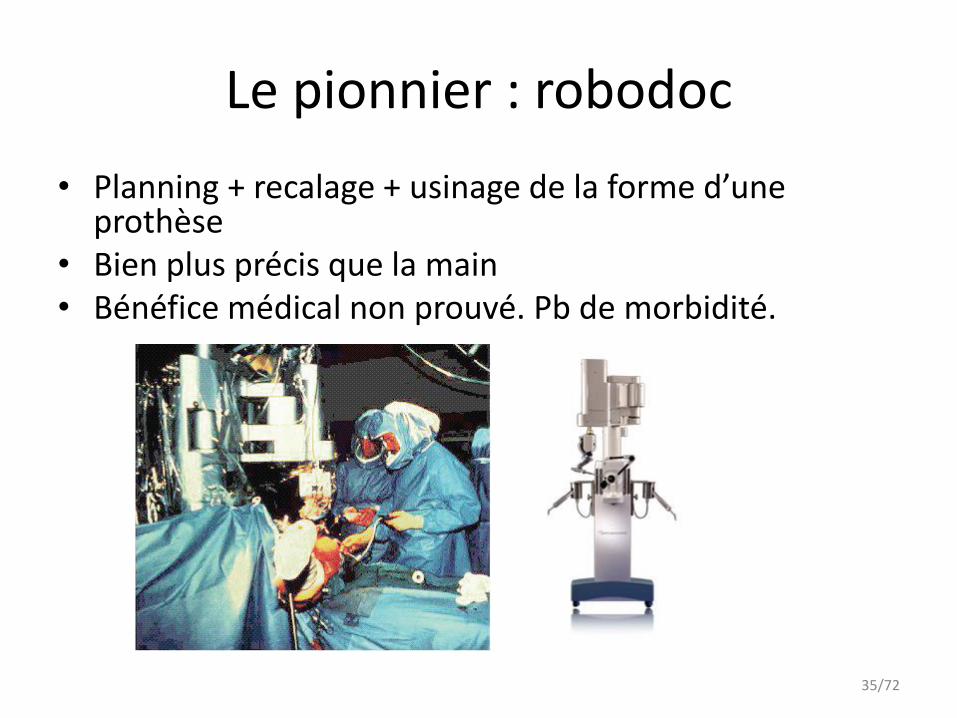
Le pionnier : robodoc
• Planning + recalage + usinage de la forme d’une prothèse
• Bien plus précis que la main • Bénéfice médical non prouvé. Pb de morbidité.
35/72

Même concept : Capsar
36/72
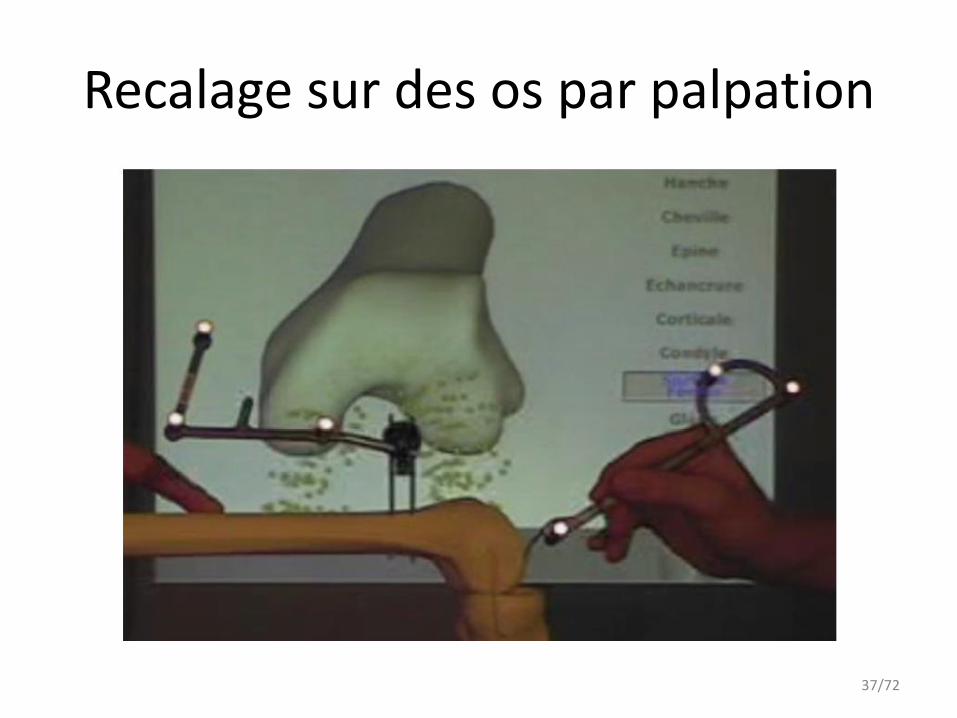
Recalage sur des os par palpation
37/72
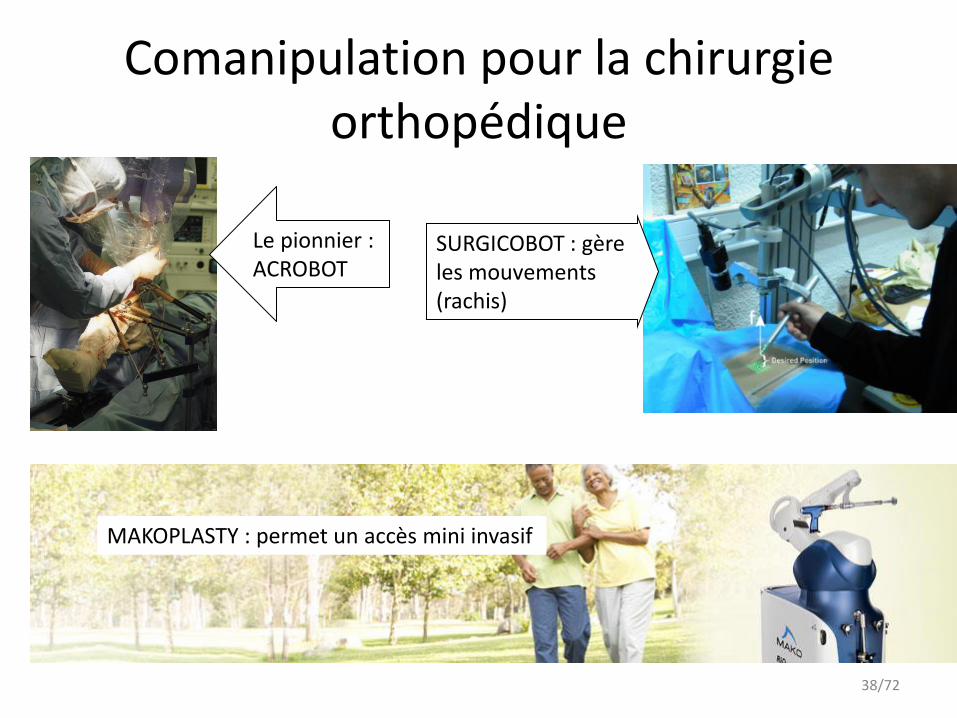
Comanipulation pour la chirurgie orthopédique
SURGICOBOT : gère les mouvements (rachis)
MAKOPLASTY : permet un accès mini invasif
Le pionnier : ACROBOT
38/72
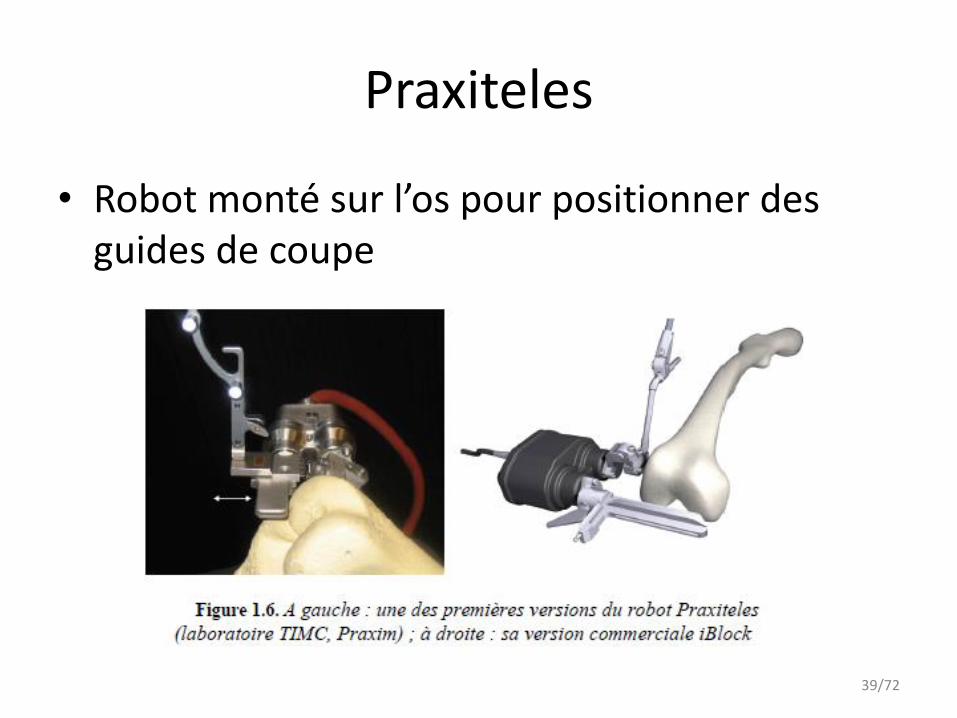
Praxiteles
• Robot monté sur l’os pour positionner des guides de coupe
39/72
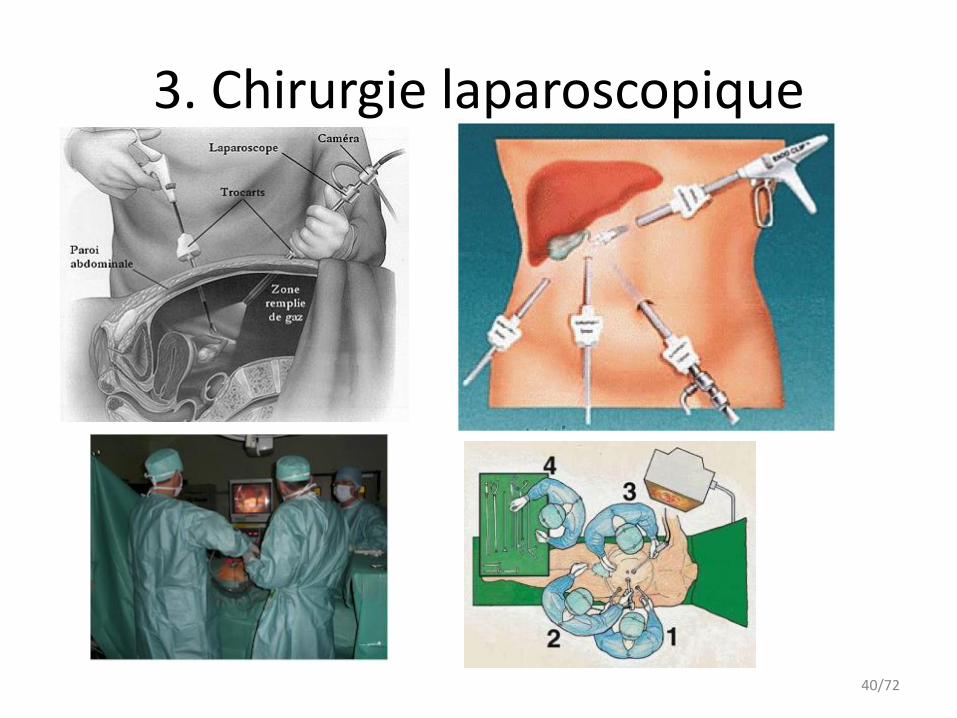
3. Chirurgie laparoscopique
40/72
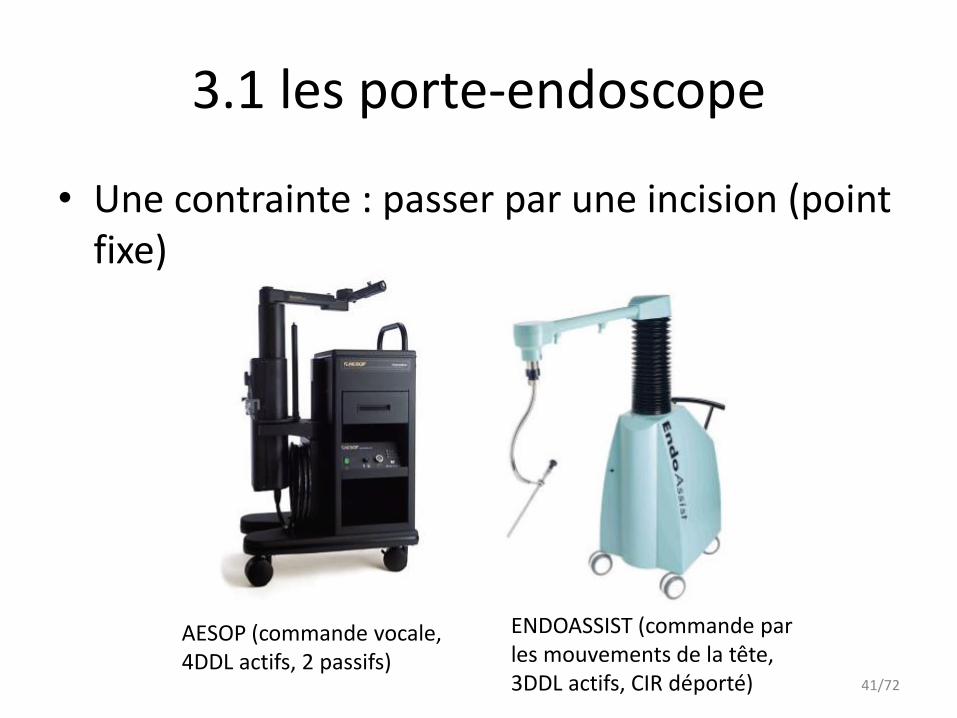
3.1 les porte-endoscope
• Une contrainte : passer par une incision (point fixe)
AESOP (commande vocale, 4DDL actifs, 2 passifs)
ENDOASSIST (commande par les mouvements de la tête, 3DDL actifs, CIR déporté) 41/72

3.1 les porte endoscope
42/72
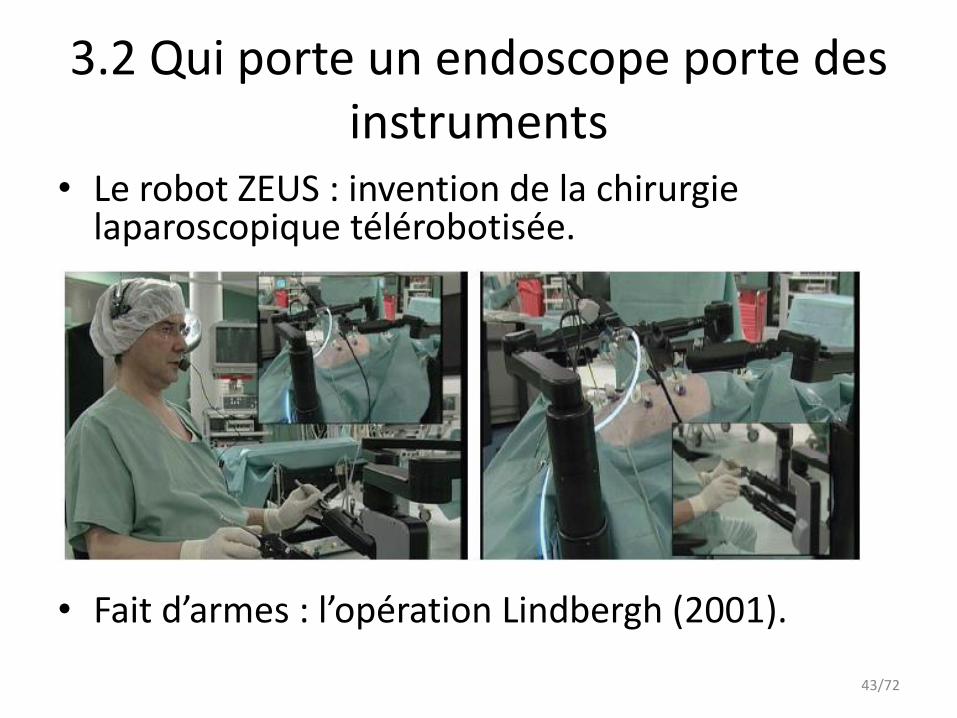
3.2 Qui porte un endoscope porte des instruments
• Le robot ZEUS : invention de la chirurgie laparoscopique télérobotisée.
• Fait d’armes : l’opération Lindbergh (2001).
43/72
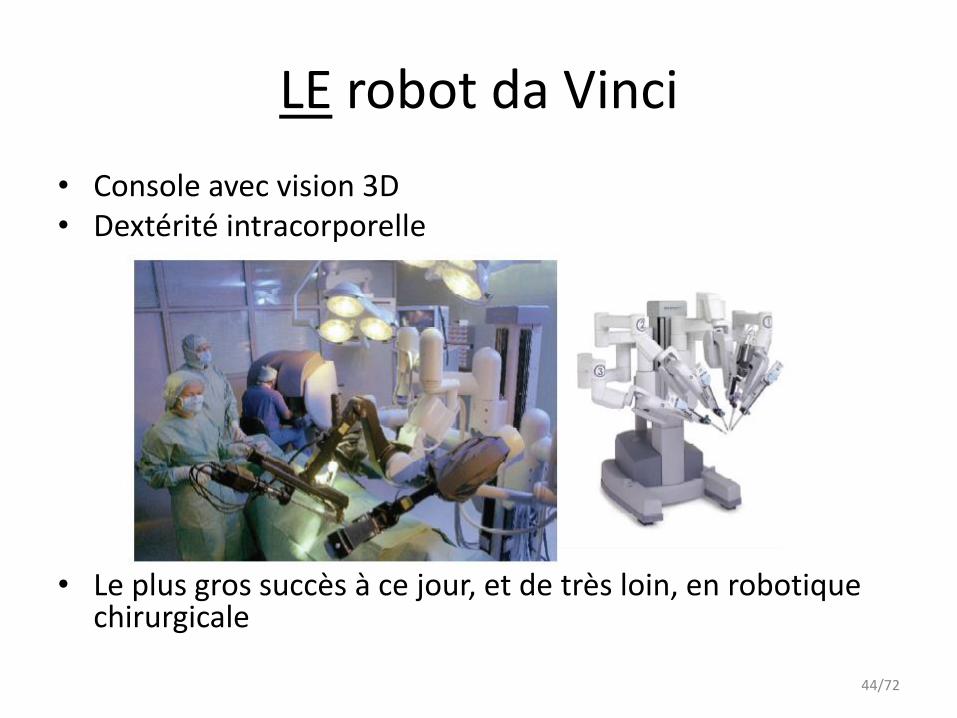
LE robot da Vinci
• Console avec vision 3D • Dextérité intracorporelle
• Le plus gros succès à ce jour, et de très loin, en robotique chirurgicale
44/72

45/72

46/72

Télémanipulation à retour d’efforts
47/72

Comanipulation d’instruments laparoscopiques
48/72
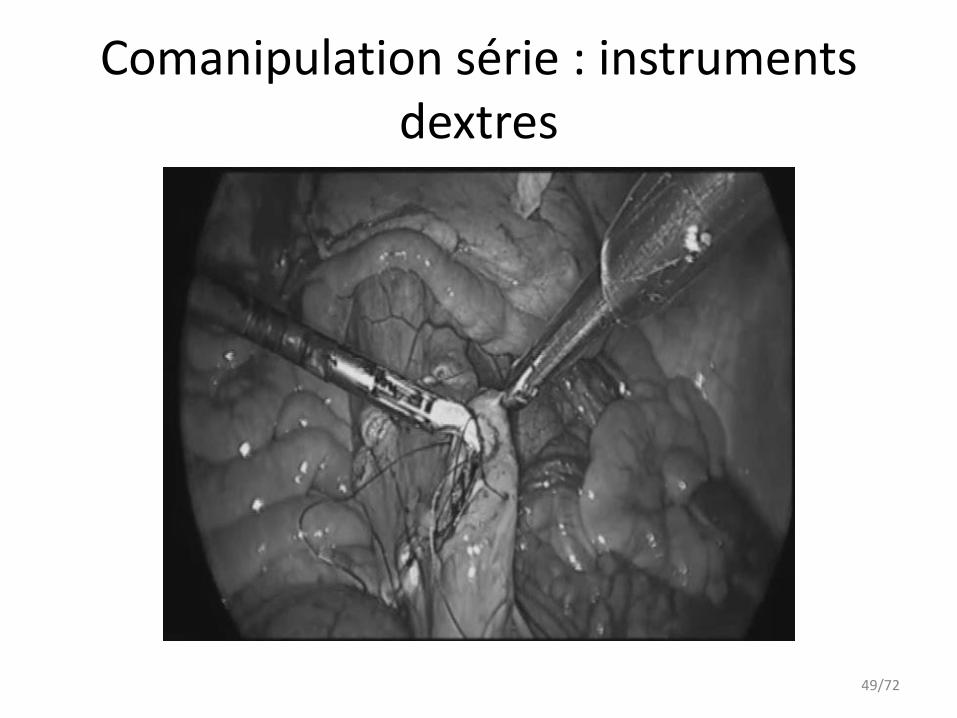
Comanipulation série : instruments dextres
49/72
Comanipulation série : instruments dextres
50/72
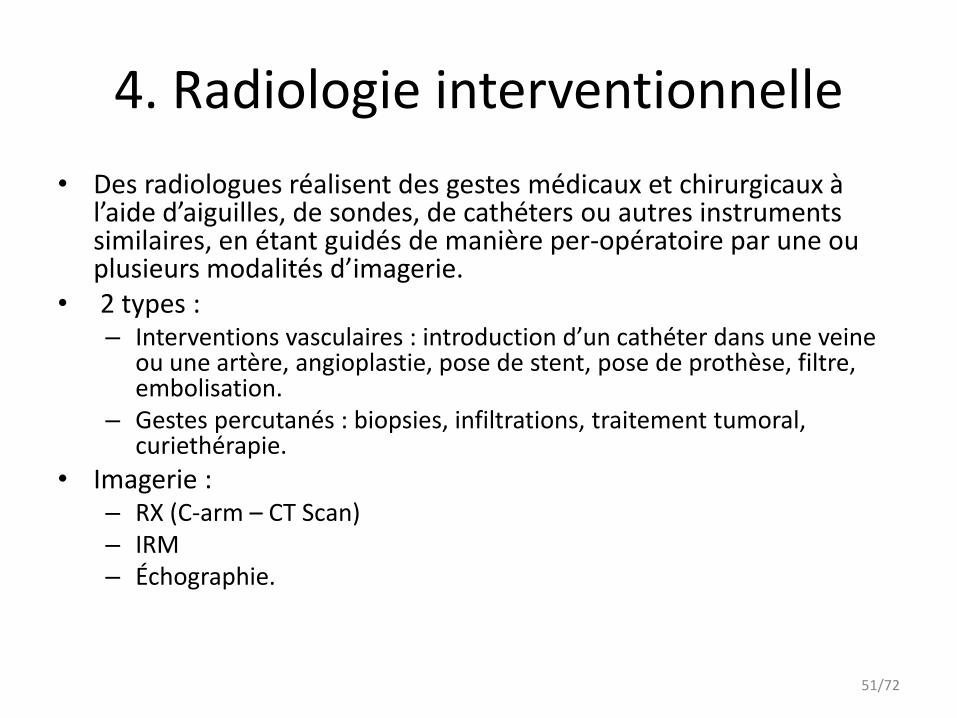
4. Radiologie interventionnelle
• Des radiologues réalisent des gestes médicaux et chirurgicaux à l’aide d’aiguilles, de sondes, de cathéters ou autres instruments similaires, en étant guidés de manière per-opératoire par une ou plusieurs modalités d’imagerie.
• 2 types : – Interventions vasculaires : introduction d’un cathéter dans une veine
ou une artère, angioplastie, pose de stent, pose de prothèse, filtre, embolisation.
– Gestes percutanés : biopsies, infiltrations, traitement tumoral, curiethérapie.
• Imagerie : – RX (C-arm – CT Scan) – IRM – Échographie.
51/72
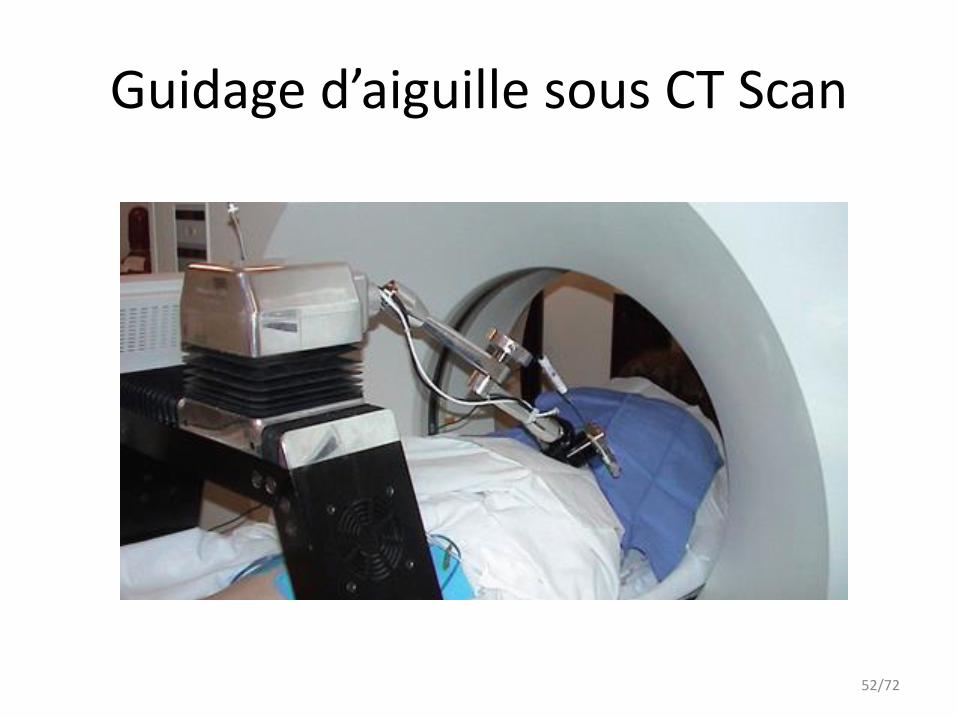
Guidage d’aiguille sous CT Scan
52/72

Guidage d’aiguille sous CT Scan ou IRM
• Innmotion
53/72
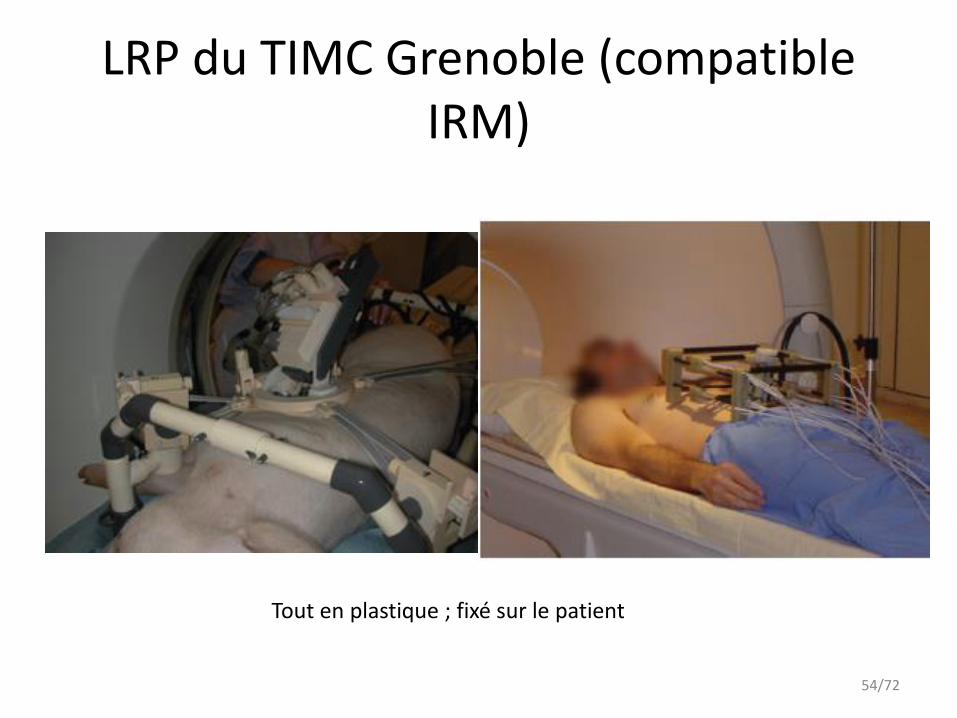
LRP du TIMC Grenoble (compatible IRM)
Tout en plastique ; fixé sur le patient
54/72

Le CTBOT du LSIIT Strasbourg
• Guidage d’aiguille sous scanner
• Contient des repères pour recalage
55/72
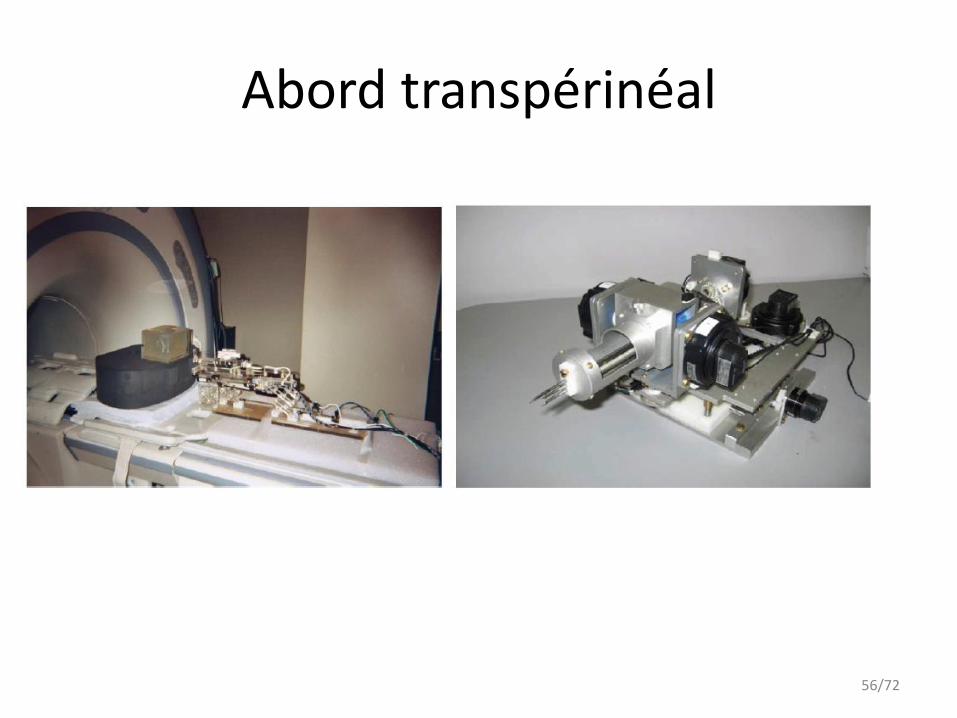
Abord transpérinéal
56/72
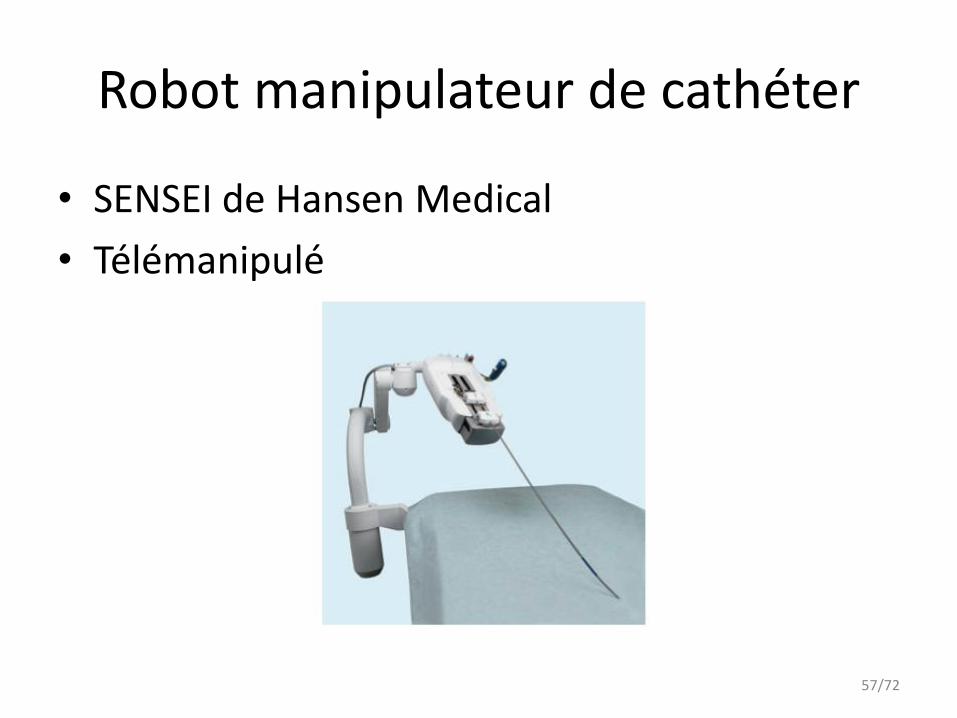
Robot manipulateur de cathéter
• SENSEI de Hansen Medical
• Télémanipulé
57/72
5. Assistance à l’examen d’échographie
• Examen échographique :
– Geste au contact
– Retour visuel en coupe
– Recherche, suivi
– Qualité de geste = expertise
58/72
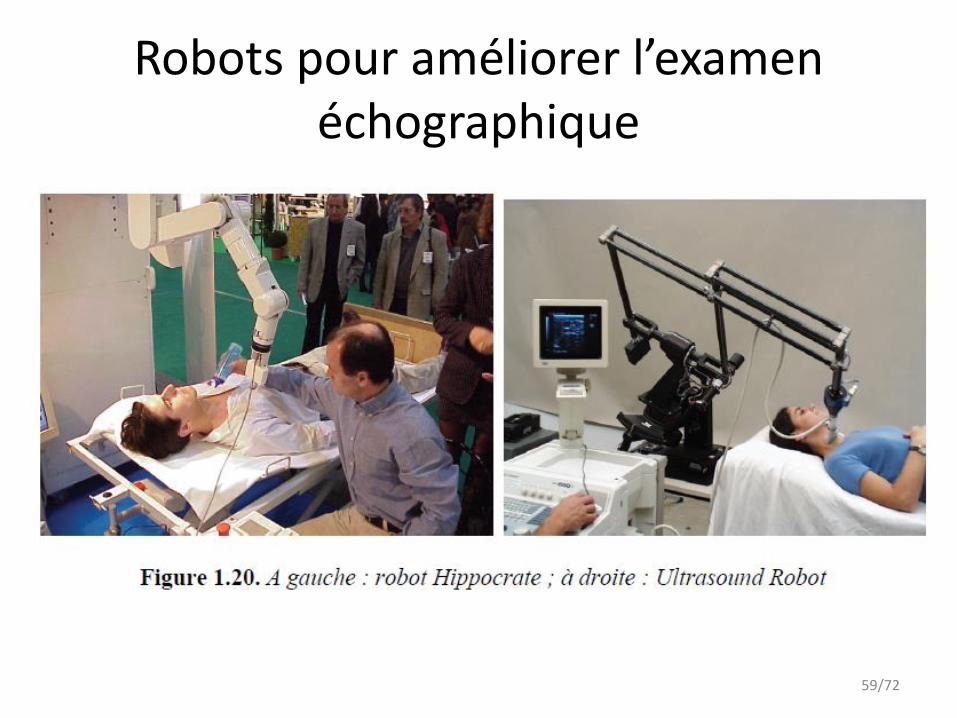
Robots pour améliorer l’examen échographique
59/72
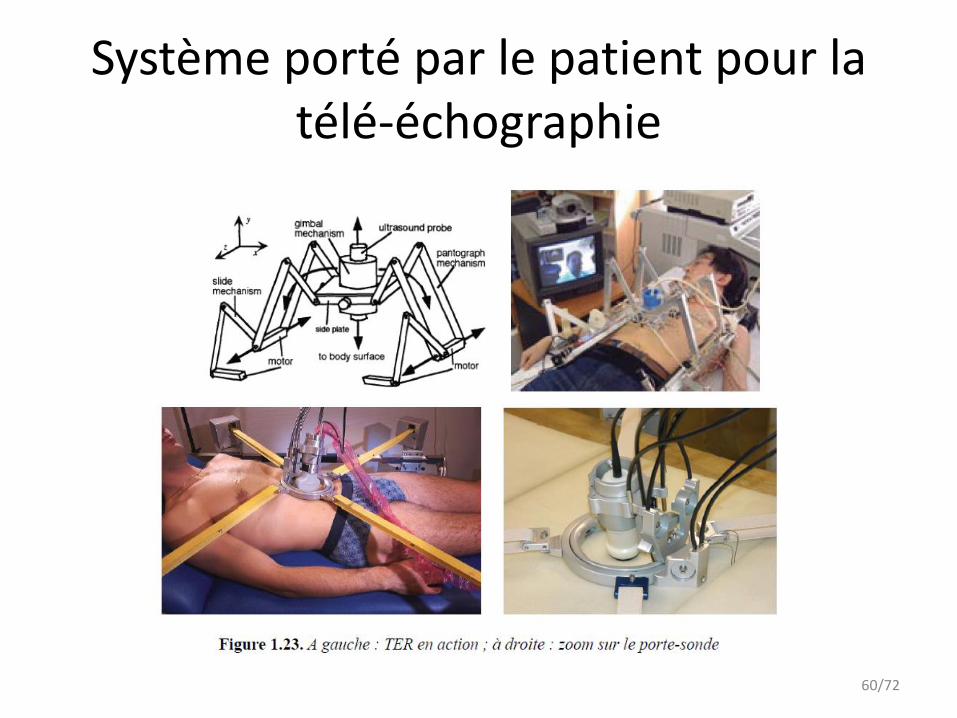
Système porté par le patient pour la télé-échographie
60/72
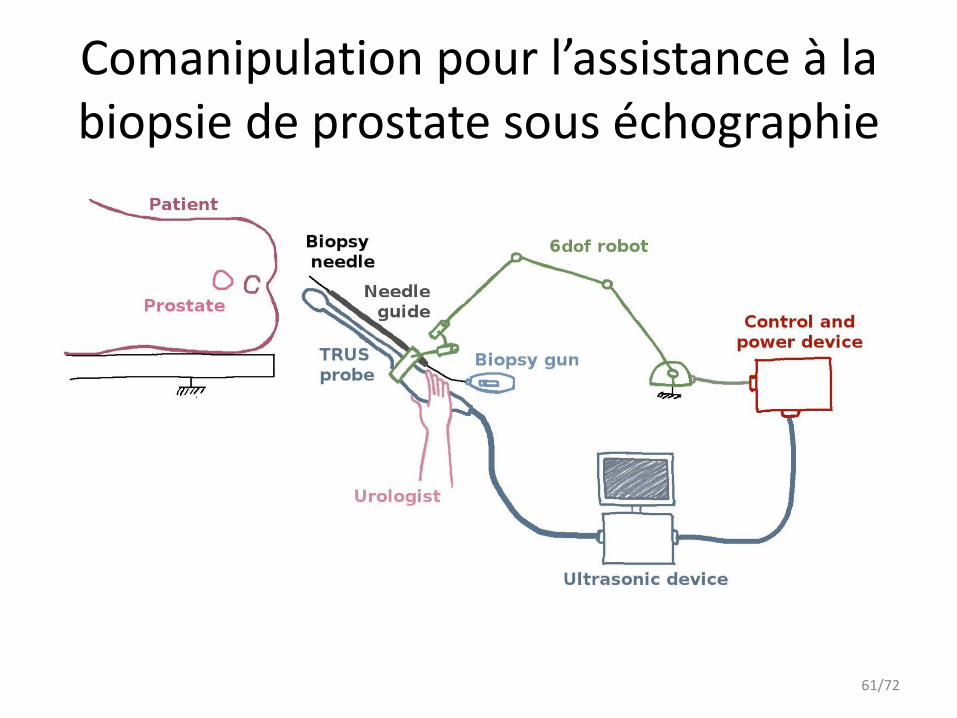
Comanipulation pour l’assistance à la biopsie de prostate sous échographie
61/72
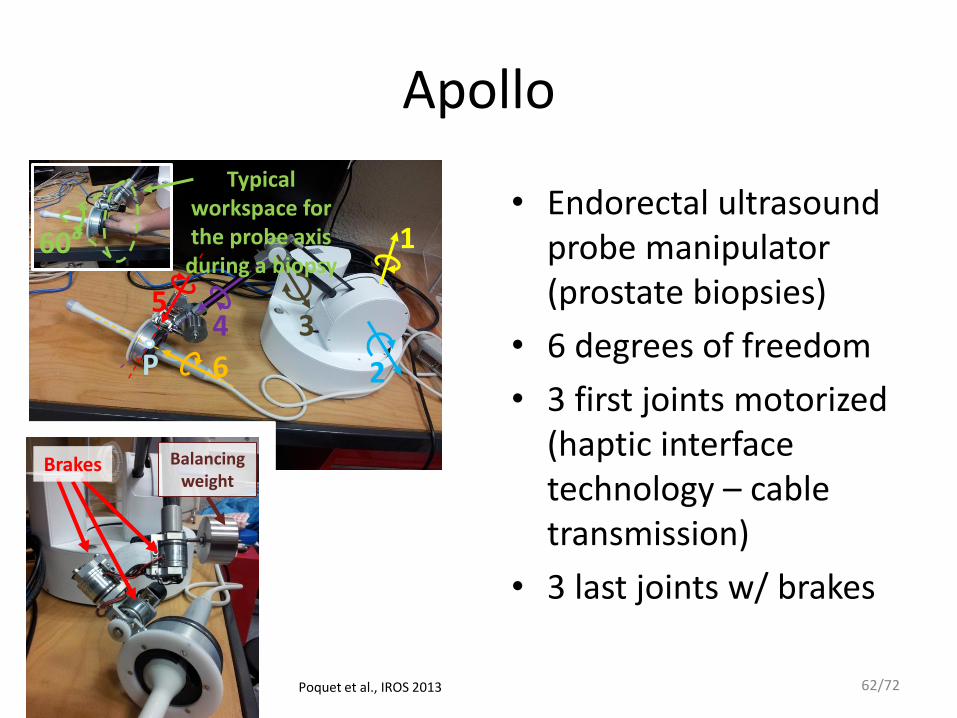
1
2
3 4 5
6 P
Typical workspace for the probe axis
during a biopsy 60°
Apollo
• Endorectal ultrasound probe manipulator (prostate biopsies)
• 6 degrees of freedom
• 3 first joints motorized (haptic interface technology – cable transmission)
• 3 last joints w/ brakes
Brakes Balancing weight
Poquet et al., IROS 2013 62/72
Apollo
63/72
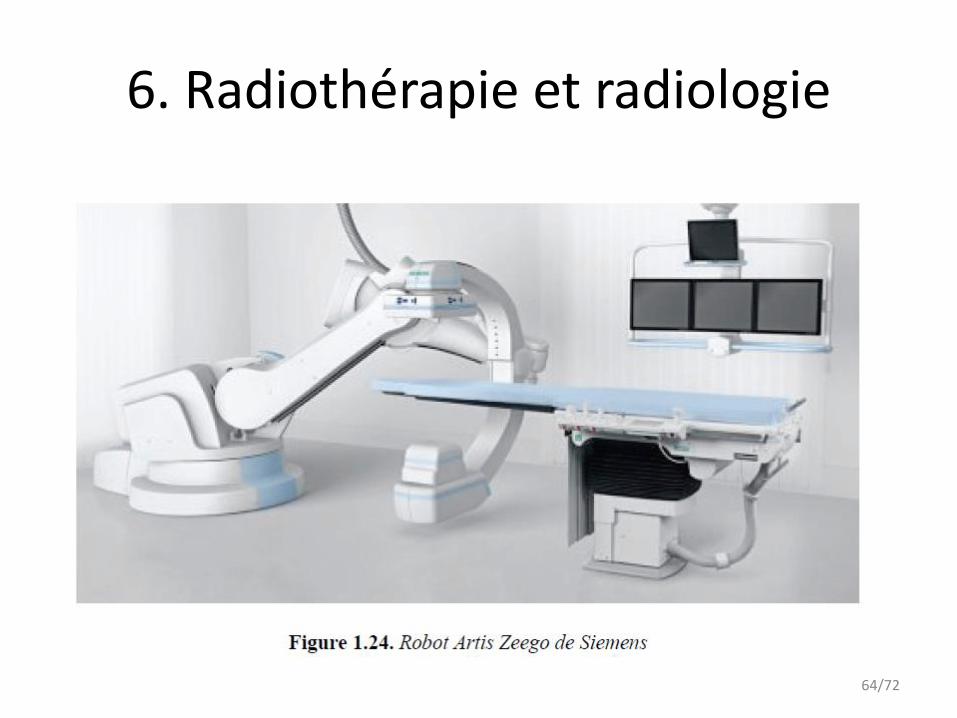
6. Radiothérapie et radiologie
64/72
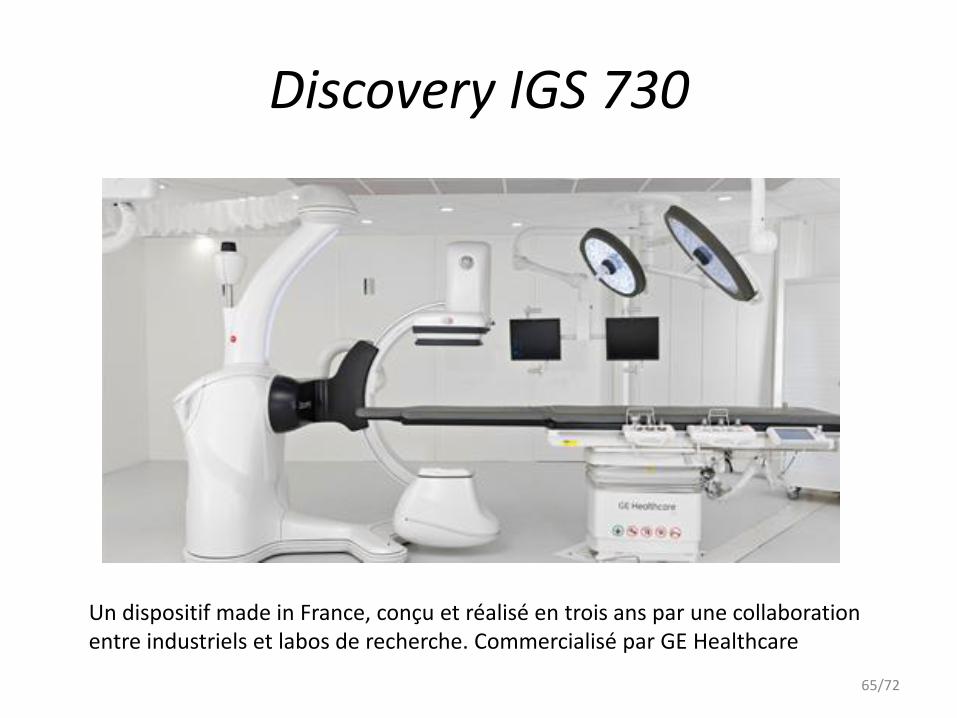
Discovery IGS 730
Un dispositif made in France, conçu et réalisé en trois ans par une collaboration entre industriels et labos de recherche. Commercialisé par GE Healthcare
65/72
66/72
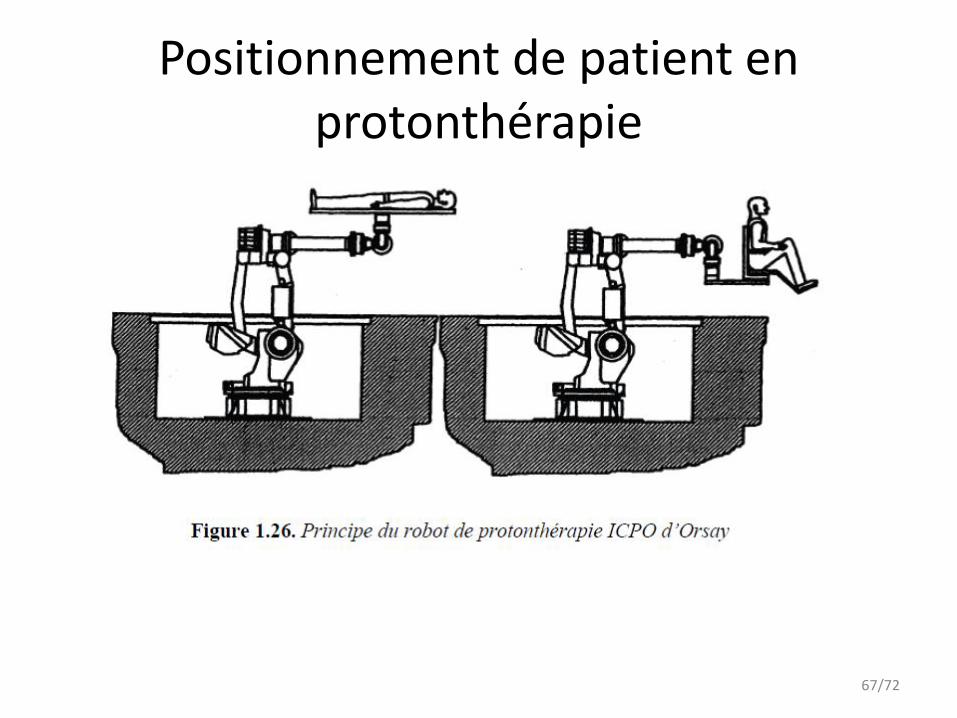
Positionnement de patient en protonthérapie
67/72

7. Le voyage fantastique
68/72
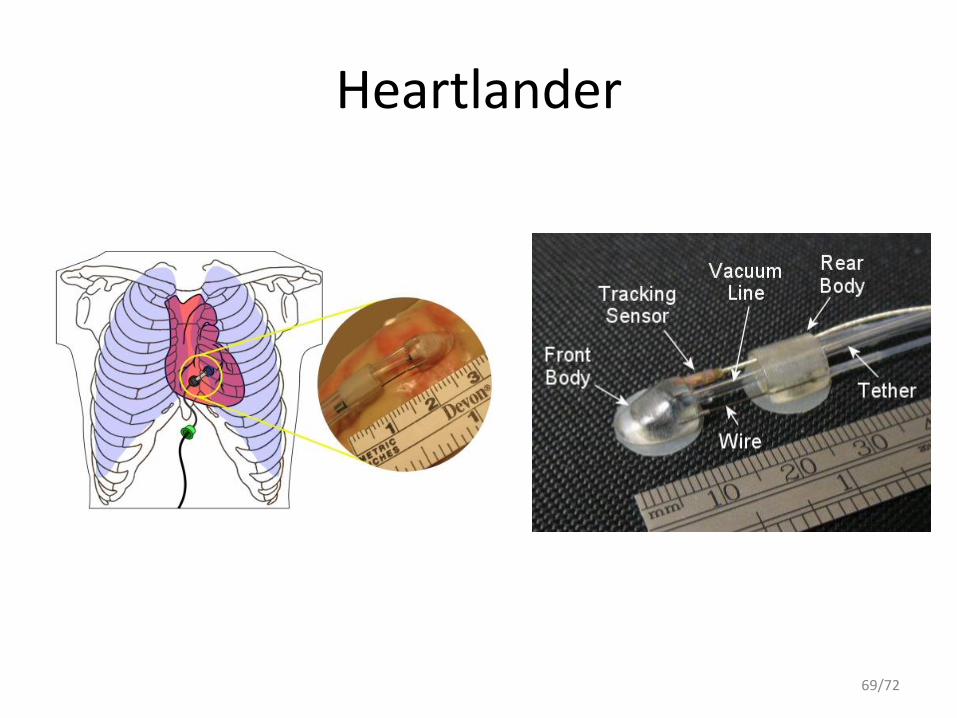
Heartlander
69/72
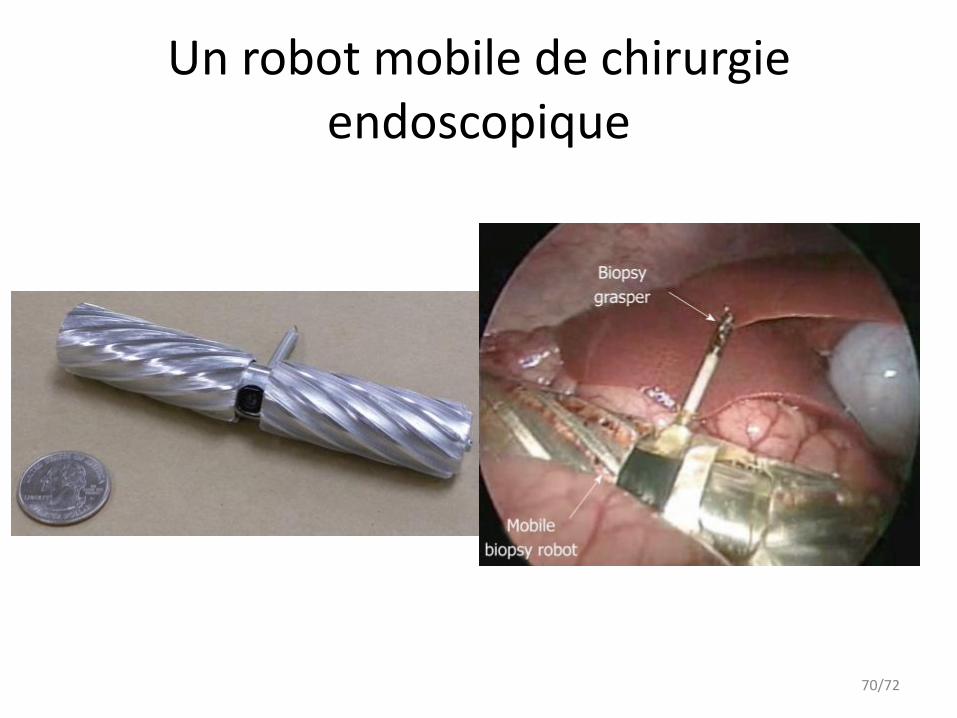
Un robot mobile de chirurgie endoscopique
70/72

Capsules intestinales (Olympus)
71/72
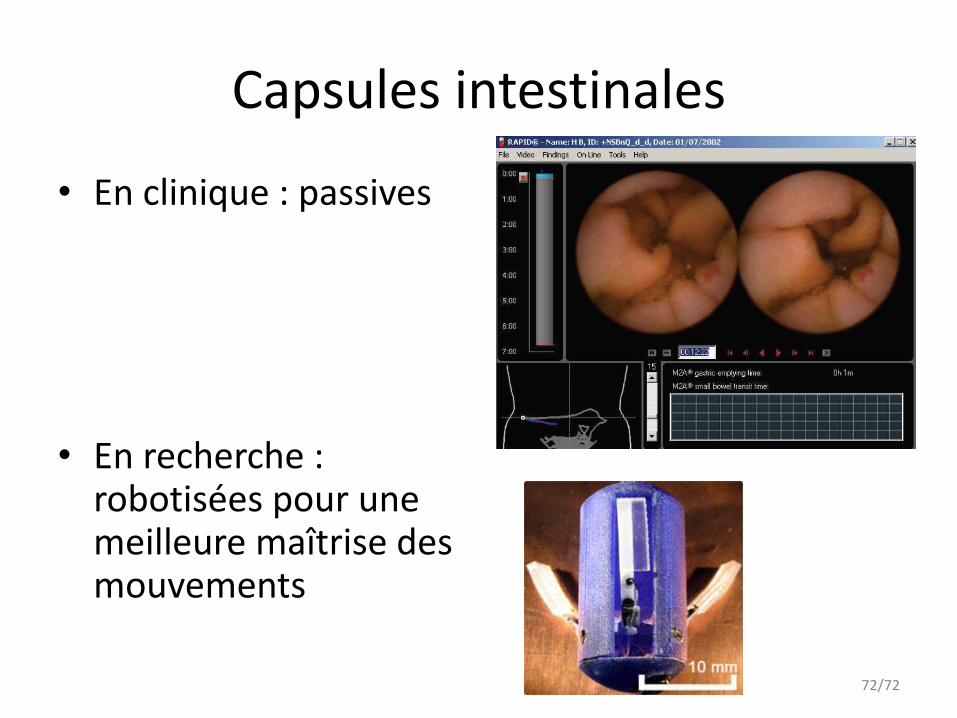
Capsules intestinales
• En clinique : passives
• En recherche : robotisées pour une meilleure maîtrise des mouvements
72/72