Embed Size (px)
Citation preview

Synthèse d’une loi de commande optimale vis-à-vis de la fiabilité des systèmes sur-actionnés en présence de
défauts
A. Khelassi, P. Weber, D. [email protected]
Centre de Recherche en Automatique de NancyCRAN-CNRS UMR 7039
Groupe: SURFDIAGwww.cran.uhp-nancy.fr
19 Octobre 2009
1|32Journée du Groupe de Travail Sûreté, Surveillance, Supervision
Fiabilité des systèmesFiabilité des systèmes
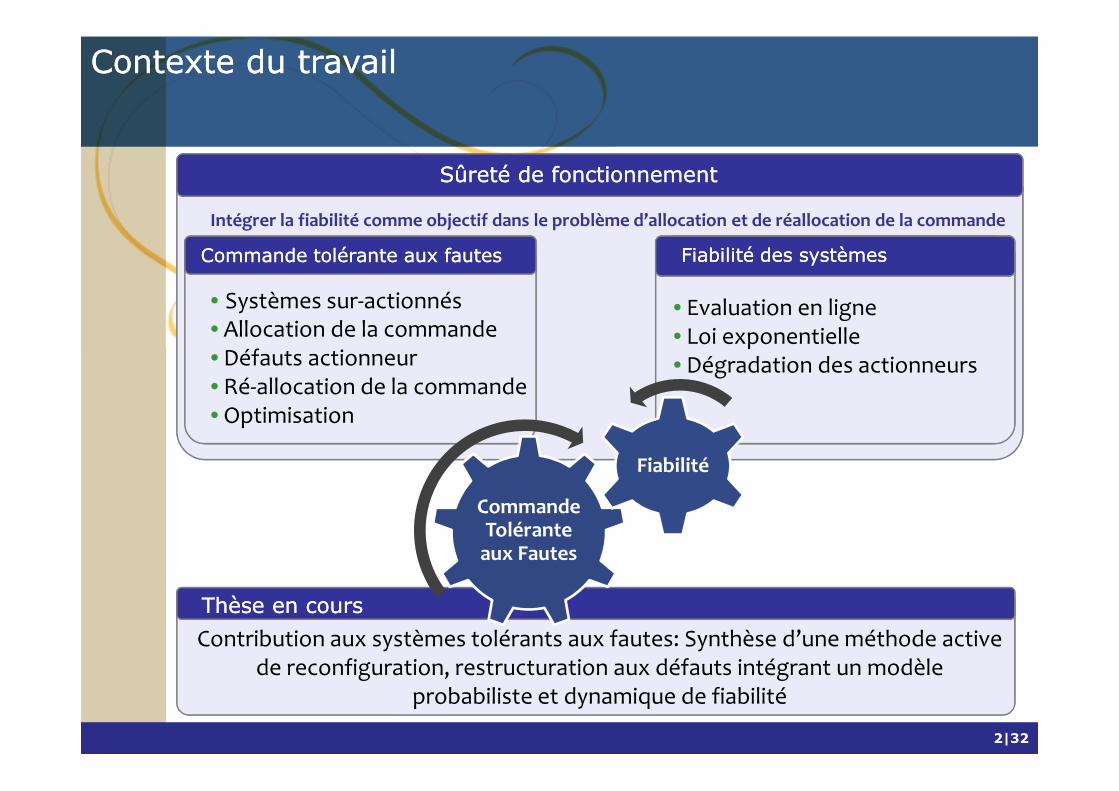
Contexte du travail Contexte du travail
Sûreté de fonctionnement Sûreté de fonctionnement
Fiabilité des systèmesFiabilité des systèmes
• Evaluation en ligne• Loi exponentielle • Dégradation des actionneurs
Commande tolérante aux fautes Commande tolérante aux fautes
• Systèmes sur-actionnés• Allocation de la commande• Défauts actionneur• Ré-allocation de la commande
Intégrer la fiabilité comme objectif dans le problème d’allocation et de réallocation de la commande
2|32
Thèse en coursThèse en cours
Contribution aux systèmes tolérants aux fautes: Synthèse d’une méthode active de reconfiguration, restructuration aux défauts intégrant un modèle
probabiliste et dynamique de fiabilité
• Ré-allocation de la commande• Optimisation
Commande Tolérante
aux Fautes
Fiabilité
1 Allocation de la commande
2 Ré-allocation de la commande
3 Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs- Problématique
PLANPLAN
3|32
- Problématique - Evaluation de la fiabilité en ligne- Approche développée
4 Application
5 Conclusion et Perspectives
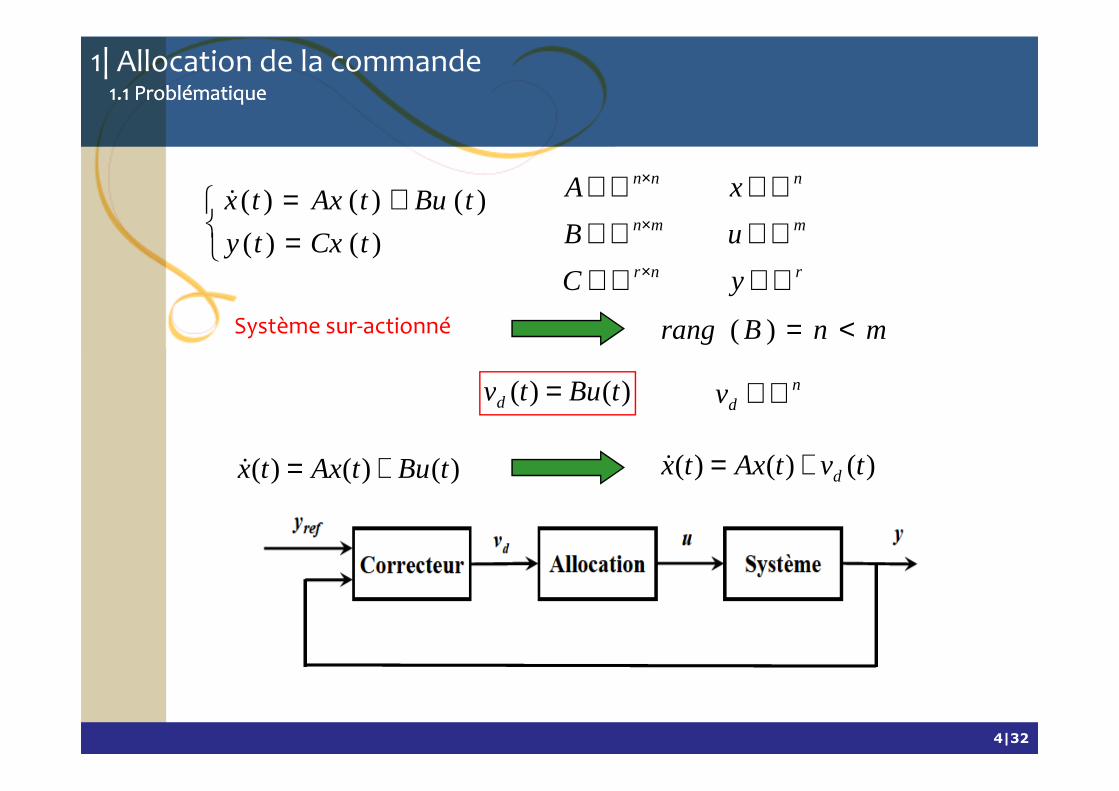
1| Allocation de la commande1.1 Problématique 1.1 Problématique
=+=
)()(
)()()(
tCxty
tButAxtxɺ
)()( tButvd =
r
m
n
y
u
x
ℜ∈ℜ∈ℜ∈
nr
mn
nn
C
B
A
×
×
×
ℜ∈ℜ∈ℜ∈
mnBrang <=)(Système sur-actionné
ndv ℜ∈
4|32
)()( tButvd =
)()()( tvtAxtx d+=ɺ
dv ℜ∈
)()()( tButAxtx +=ɺ
1| Allocation de la commande1.1 Problématique1.1 Problématique
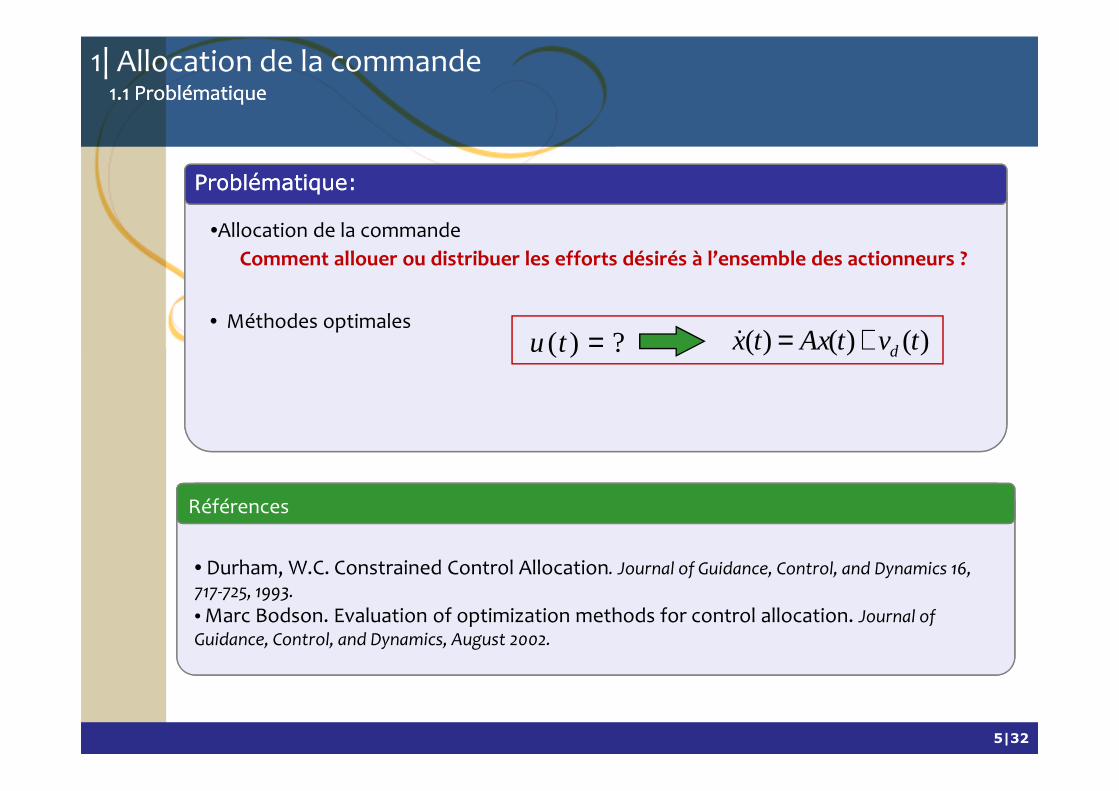
Problématique: Problématique:
• Méthodes optimales
Comment allouer ou distribuer les efforts désirés à l’ensemble des actionneurs ?
?)( =tu )()()( tvtAxtx d+=ɺ
•Allocation de la commande
5|32
Références
• Durham, W.C. Constrained Control Allocation. Journal of Guidance, Control, and Dynamics 16, 717-725, 1993.
• Marc Bodson. Evaluation of optimization methods for control allocation. Journal of Guidance, Control, and Dynamics, August 2002.
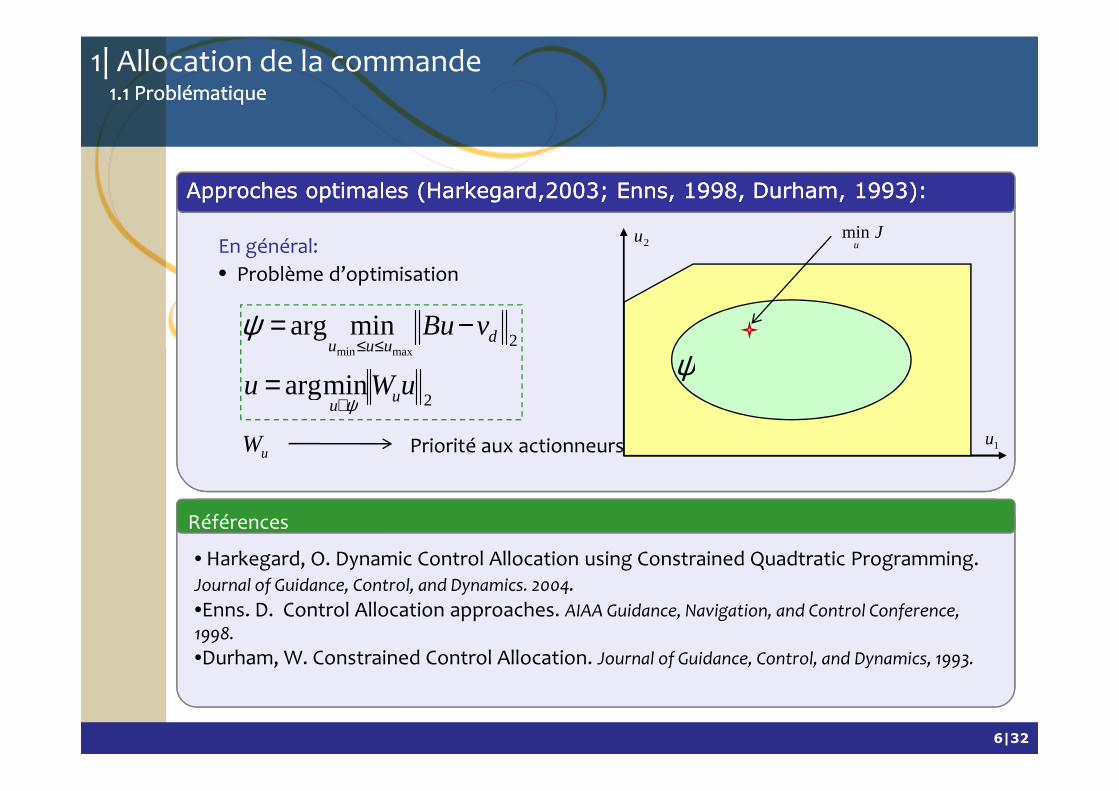
Approches optimales (Approches optimales (HarkegardHarkegard,2003; Enns, 1998, Durham, 1993): ,2003; Enns, 1998, Durham, 1993):
En général:
• Problème d’optimisation
2
2
minarg
minargmaxmin
uWu
vBu
u
duuu
ψ
ψ
∈
≤≤
=
−=
1| Allocation de la commande1.1 Problématique1.1 Problématique
ψ
Ju
min2u
6|32
2minarg uWu uu ψ∈
=
RéférencesRéférences
• Harkegard, O. Dynamic Control Allocation using Constrained Quadtratic Programming. Journal of Guidance, Control, and Dynamics. 2004. •Enns. D. Control Allocation approaches. AIAA Guidance, Navigation, and Control Conference, 1998.
•Durham, W. Constrained Control Allocation. Journal of Guidance, Control, and Dynamics, 1993.
uW Priorité aux actionneurs 1u
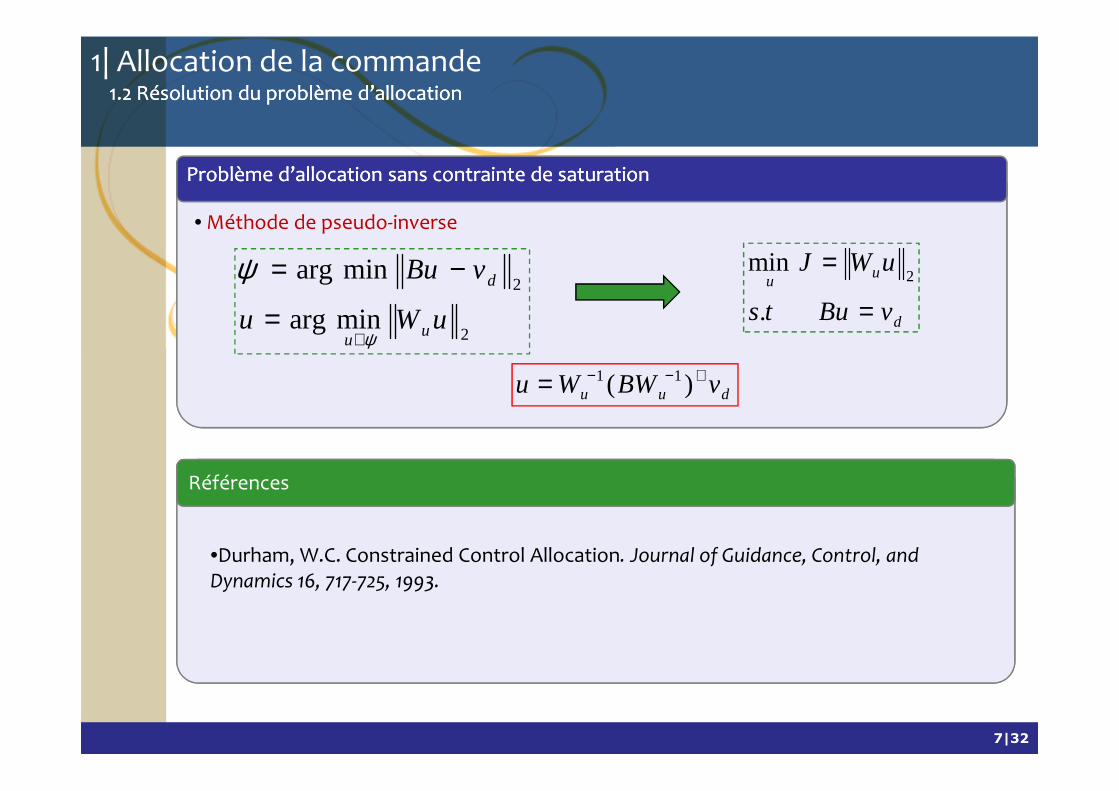
Problème d’allocation sans contrainte de saturation Problème d’allocation sans contrainte de saturation
d
uu
vButs
uWJ
=
=
.
min2
duu vBWWu +−−= )( 11
• Méthode de pseudo-inverse
1| Allocation de la commande1.2 Résolution du problème d’allocation1.2 Résolution du problème d’allocation
2
2
minarg
minarg
uWu
vBu
uu
d
ψ
ψ
∈=
−=
7|32
duu vBWWu = )(
Références
•Durham, W.C. Constrained Control Allocation. Journal of Guidance, Control, and Dynamics 16, 717-725, 1993.
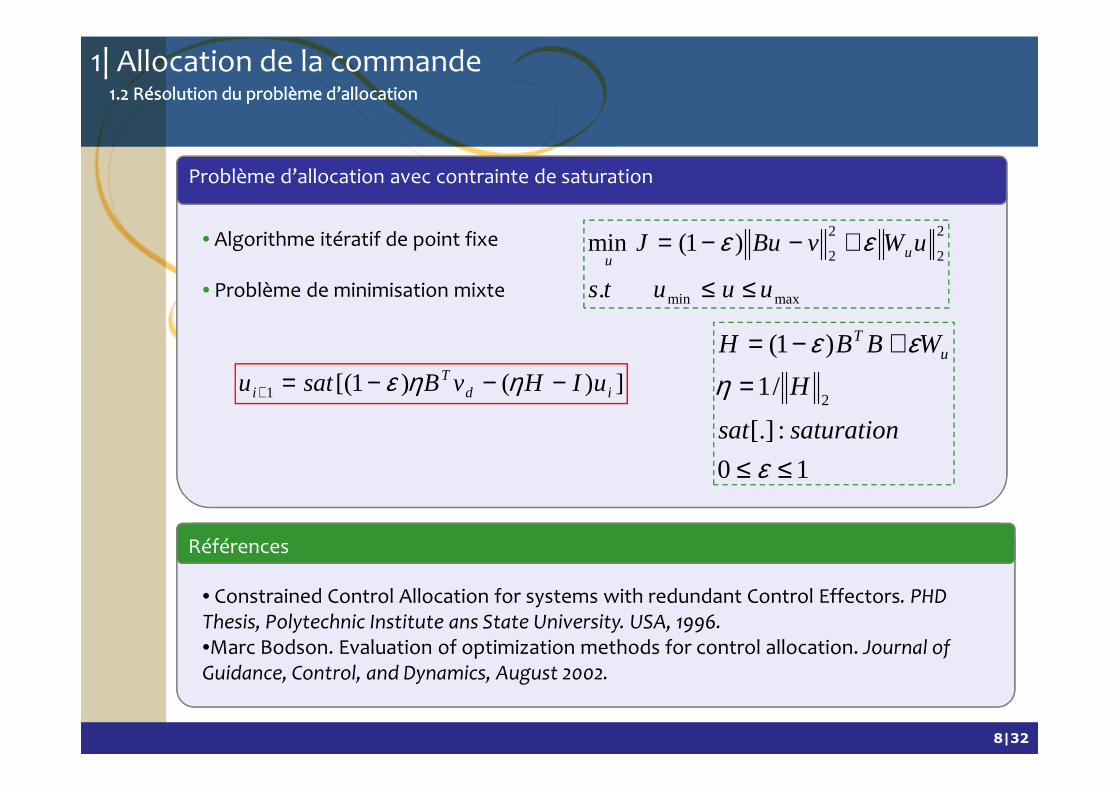
Problème d’allocation avec contrainte de saturation
• Algorithme itératif de point fixe
• Problème de minimisation mixte maxmin
2
2
2
2
.
)1(min
uuuts
uWvBuJ uu
≤≤
+−−= εε
])()1[(1 idT
i uIHvBsatu −−−=+ ηηε /1
)1(
2=
+−=η
εεH
WBBH uT
1| Allocation de la commande1.2 Résolution du problème d’allocation1.2 Résolution du problème d’allocation
8|32
])()1[(1 idi uIHvBsatu −−−=+ ηηε
10
:[.]
/12
≤≤
=
ε
ηsaturationsat
H
Références
• Constrained Control Allocation for systems with redundant Control Effectors. PHD Thesis, Polytechnic Institute ans State University. USA, 1996.•Marc Bodson. Evaluation of optimization methods for control allocation. Journal of Guidance, Control, and Dynamics, August 2002.
1 Allocation de la commande
2 Ré-allocation de la commande
3 Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs- Problématique
PLANPLAN
9|32
- Problématique - Evaluation de la fiabilité en ligne- Approche développée
4 Application
5 Conclusion et Perspectives
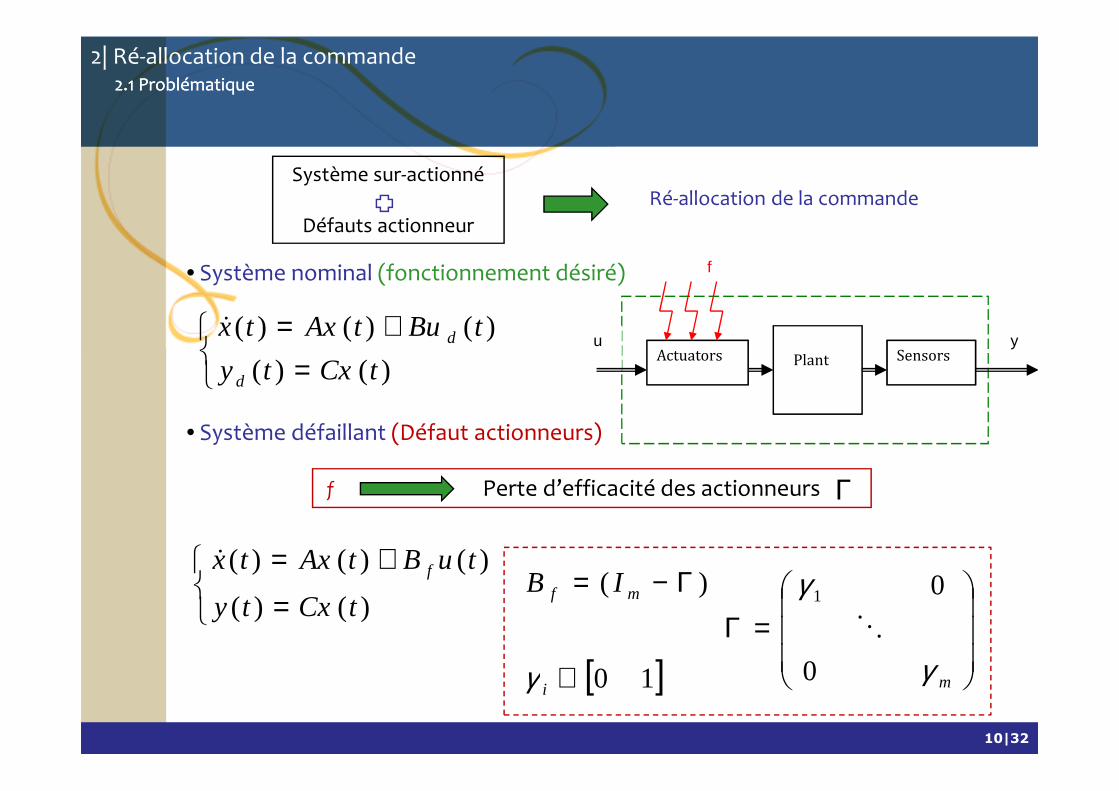
2| Ré-allocation de la commande
f
u yPlant SensorsActuators
=+=)()(
)()()(
tCxty
tButAxtx
d
dɺ
• Système nominal (fonctionnement désiré)
Système sur-actionné
Défauts actionneur
Ré-allocation de la commande
2.1 Problématique2.1 Problématique
10|32
• Système défaillant (Défaut actionneurs)
=
+=
)()(
)()()(
tCxty
tuBtAxtx fɺ)( Γ−= mf IB
=Γ
mγ
γ
0
01
⋱
[ ]10∈iγ
f Perte d’efficacité des actionneurs Γ
2| Ré-allocation de la commande
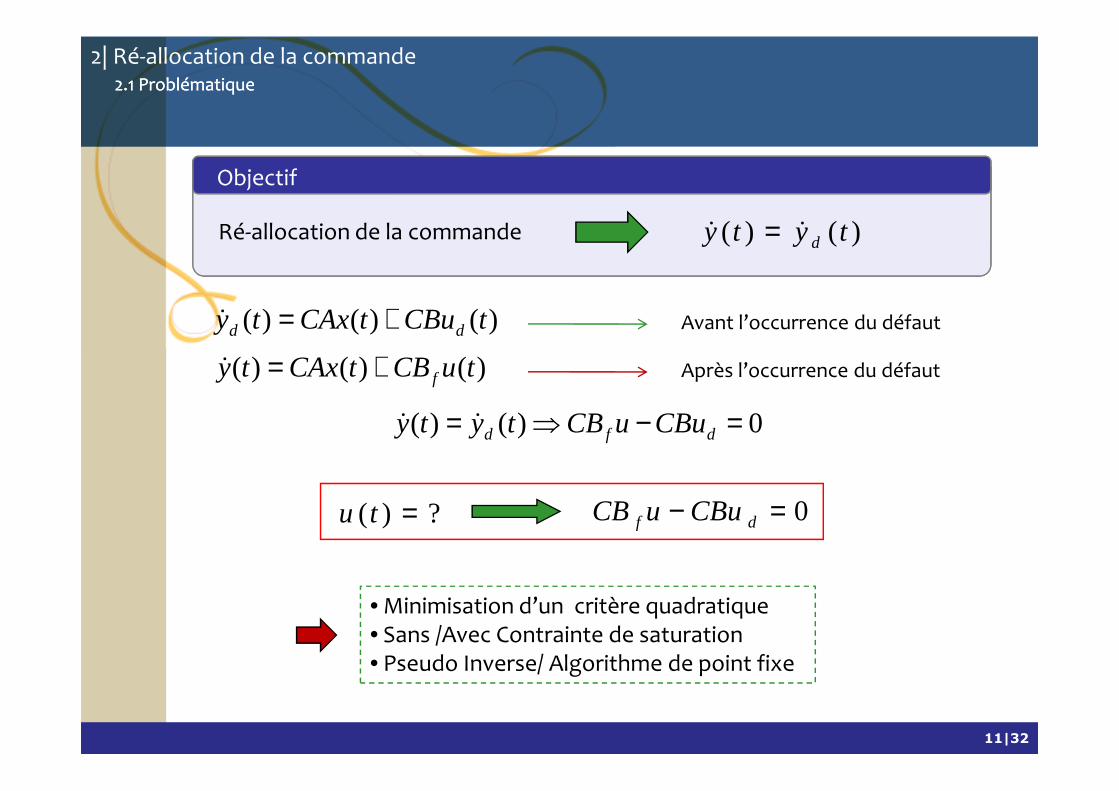
)()()( tuCBtCAxty f+=ɺ
)()()( tCButCAxty dd +=ɺ Avant l’occurrence du défaut
Après l’occurrence du défaut
Objectif
Ré-allocation de la commande )()( tyty dɺɺ =
2.1 Problématique2.1 Problématique
11|32
0)()( =−⇒= dfd CBuuCBtyty ɺɺ
?)( =tu 0=− df CBuuCB
• Minimisation d’un critère quadratique• Sans /Avec Contrainte de saturation• Pseudo Inverse/ Algorithme de point fixe
2| Ré-allocation de la commande
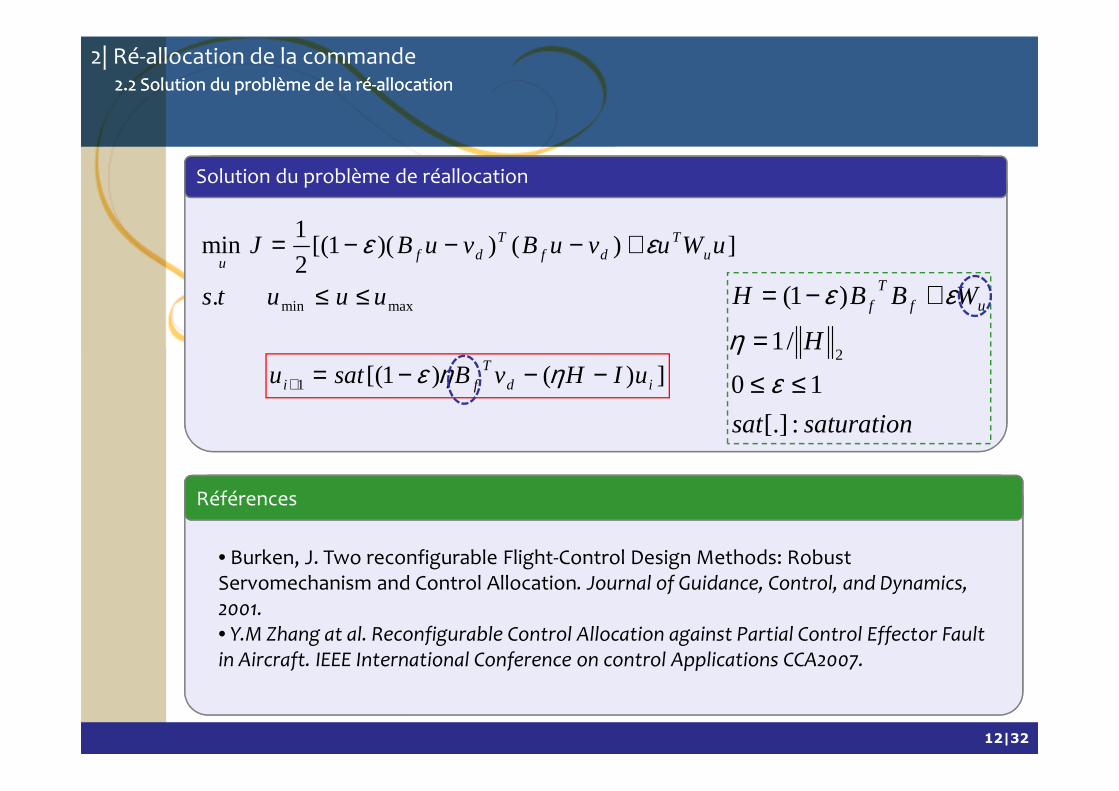
Solution du problème de réallocation
maxmin.
])())(1[(2
1min
uuuts
uWuvuBvuBJ uT
dfT
dfu
≤≤
+−−−= εε
])()1[(1 idT
fi uIHvBsatu −−−=+ ηηεH
WBBH ufT
f
10
/1
)1(
2
≤≤
=
+−=
εη
εε
2.2 Solution du problème de la 2.2 Solution du problème de la réré--allocationallocation
12|32
saturationsat :[.]
10 ≤≤ ε
Références
• Burken, J. Two reconfigurable Flight-Control Design Methods: Robust Servomechanism and Control Allocation. Journal of Guidance, Control, and Dynamics, 2001. • Y.M Zhang at al. Reconfigurable Control Allocation against Partial Control Effector Fault in Aircraft. IEEE International Conference on control Applications CCA2007.
2| Ré-allocation de la commande
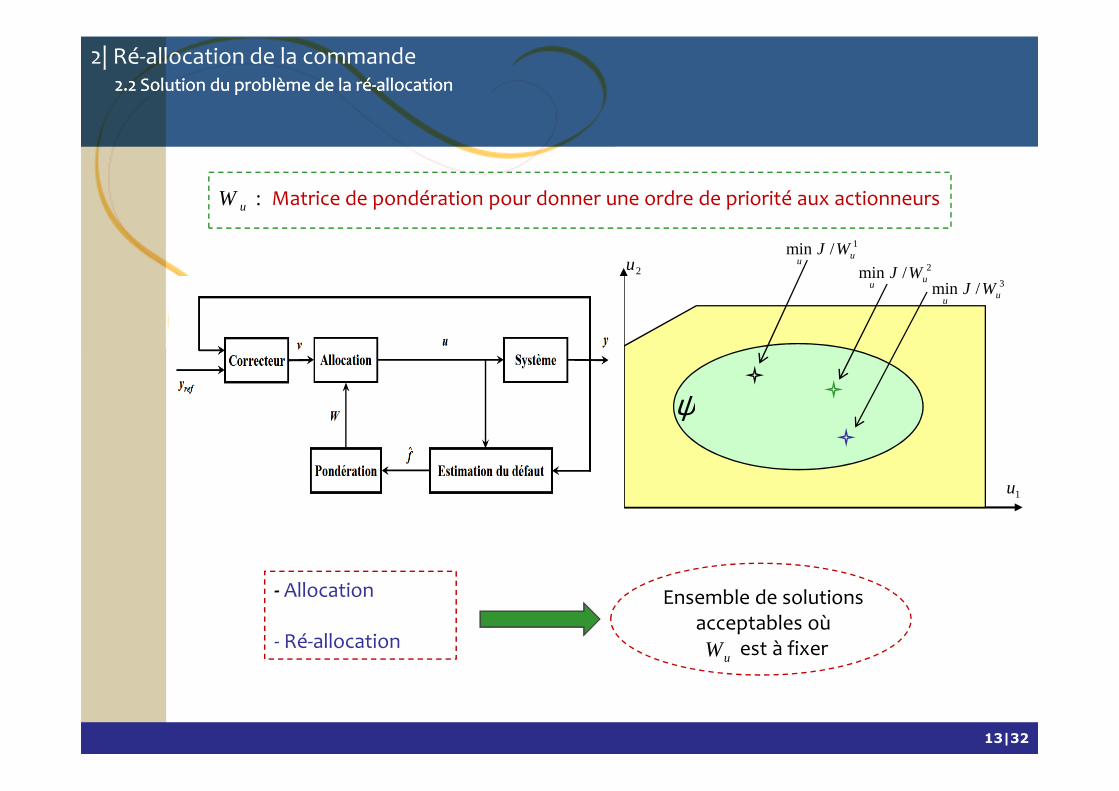
:uW Matrice de pondération pour donner une ordre de priorité aux actionneurs
2u1/min u
uWJ
2/min uu
WJ3/min u
uWJ
2.2 Solution du problème de la 2.2 Solution du problème de la réré--allocationallocation
13|32
- Allocation
- Ré-allocation
Ensemble de solutions acceptables où
est à fixer uW
ψ
1u
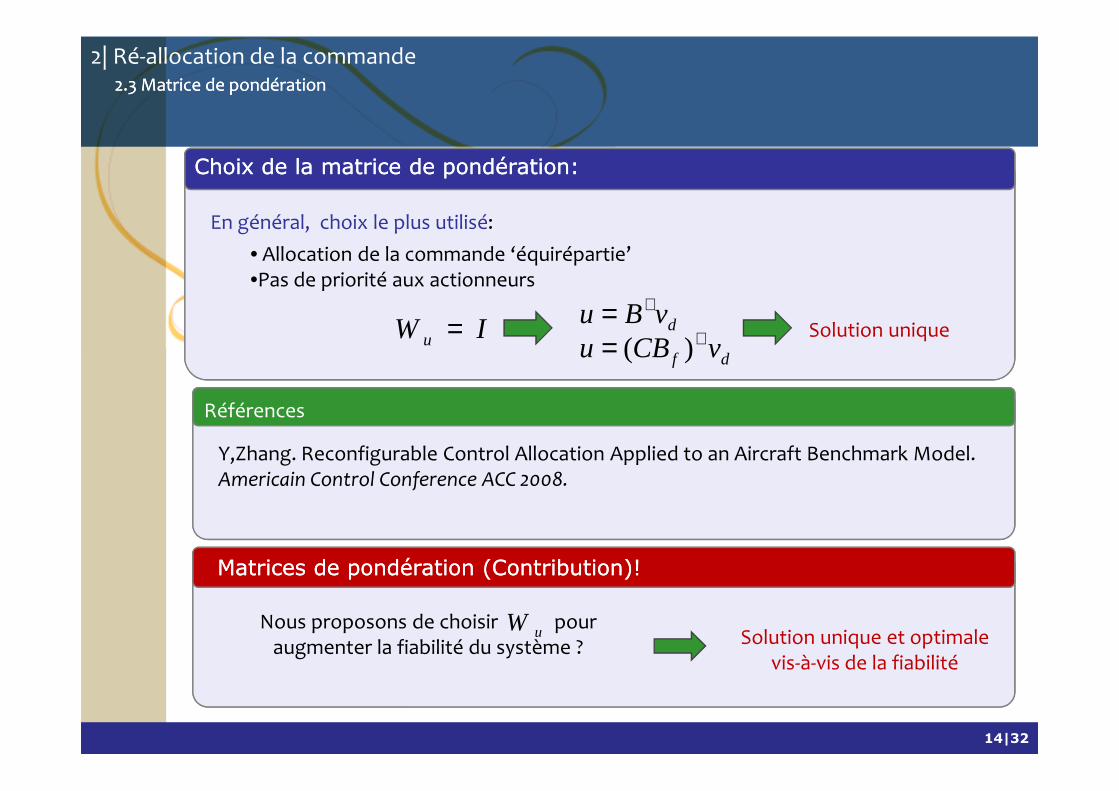
Choix de la matrice de pondération: Choix de la matrice de pondération:
En général, choix le plus utilisé:
dvBu +=df vCBu += )(
IW u = Solution unique
• Allocation de la commande ‘équirépartie’ •Pas de priorité aux actionneurs
2| Ré-allocation de la commande2.3 Matrice de pondération2.3 Matrice de pondération
14|32
Matrices de pondération (Contribution)!Matrices de pondération (Contribution)!
Nous proposons de choisir pour augmenter la fiabilité du système ? Solution unique et optimale
vis-à-vis de la fiabilité
uW
Références
Y,Zhang. Reconfigurable Control Allocation Applied to an Aircraft Benchmark Model. Americain Control Conference ACC 2008.
1 Allocation de la commande
2 Ré-allocation de la commande
3 Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs- Problématique
PLANPLAN
15|32
- Problématique - Evaluation de la fiabilité en ligne- Approche développée
4 Application
5 Conclusion et Perspectives
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|1 Problématique
ObjectifObjectif
• Allocation de la commande tenant en compte la dégradation des composants• Maintenir des performances acceptables jusqu’à la fin de la mission• Améliorer la fiabilité du systèmes tolérants aux fautes
16|32
Comment??Comment??
Intégrer la fiabilité comme un objective dans le problème d’allocation et Ré-allocation de la commande
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|1 Problématique
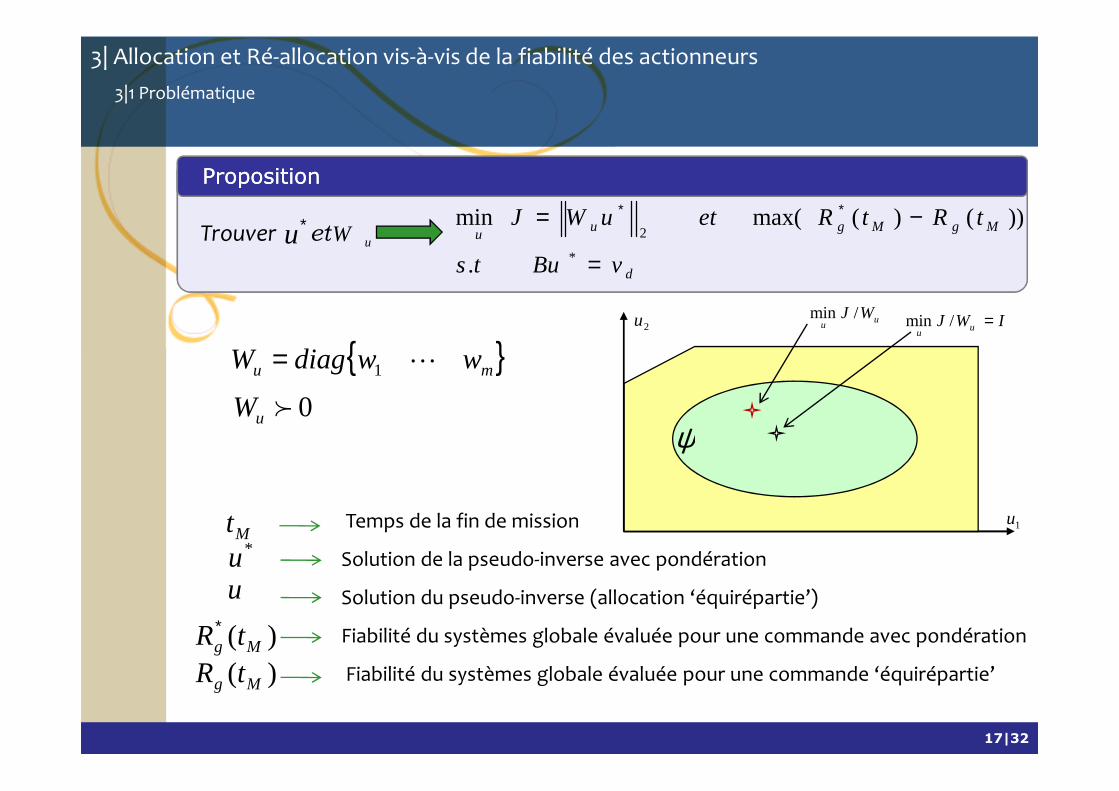
PropositionProposition
Trouver et uW
d
MgMguu
vButs
tRtRetuWJ
=
−= ∗∗
*
2
.
))()(max(min
{ }mu wwdiagW ⋯1=
0≻W
2u uu
WJ /min IWJ uu
=/min
∗u
17|32
0≻uW
Temps de la fin de mission
Solution de la pseudo-inverse avec pondération
Solution du pseudo-inverse (allocation ‘équirépartie’)
Fiabilité du systèmes globale évaluée pour une commande avec pondération
Fiabilité du systèmes globale évaluée pour une commande ‘équirépartie’
Mt*u
u
)( Mg tR∗
)( Mg tR
1u
ψ
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|1 Problématique
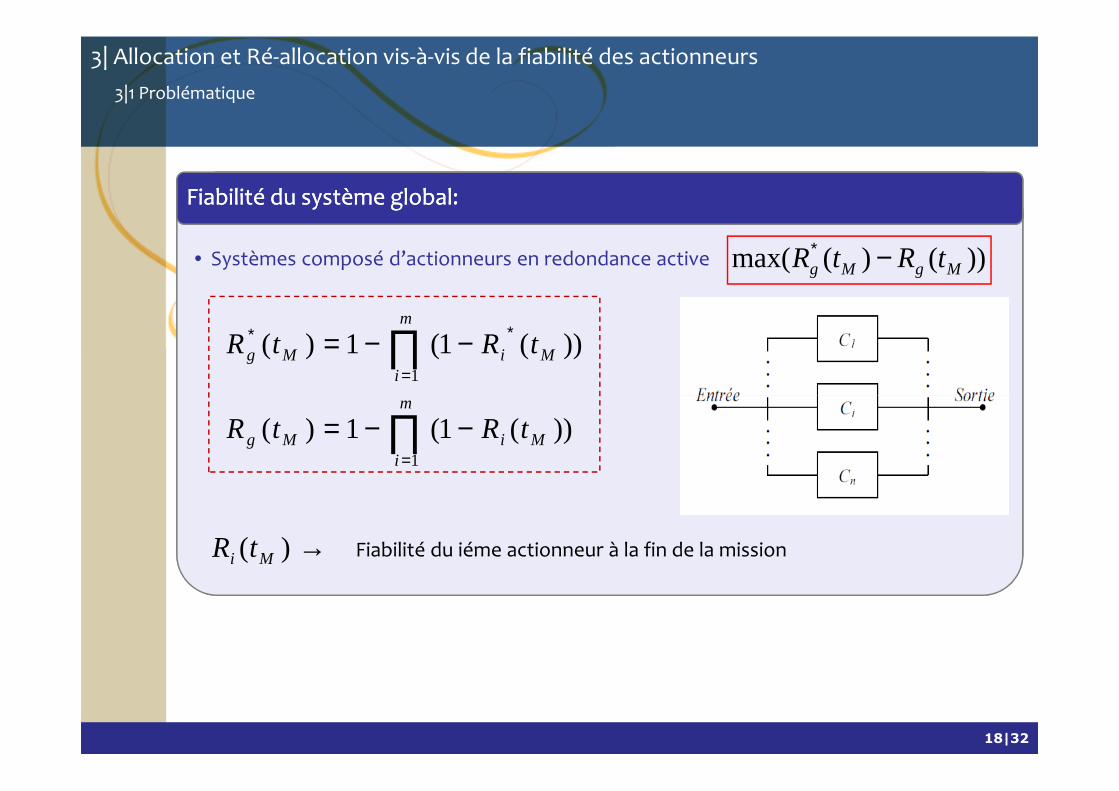
Fiabilité du système global:Fiabilité du système global:
• Systèmes composé d’actionneurs en redondance active
∏=
∗∗ −−=
m
m
iMiMg tRtR
1
))(1(1)(
))()(max( MgMg tRtR −∗
18|32
→)( Mi tR Fiabilité du iéme actionneur à la fin de la mission
∏=
−−=m
iMiMg tRtR
1
))(1(1)(
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|2 Evaluation de la fiabilité en ligne
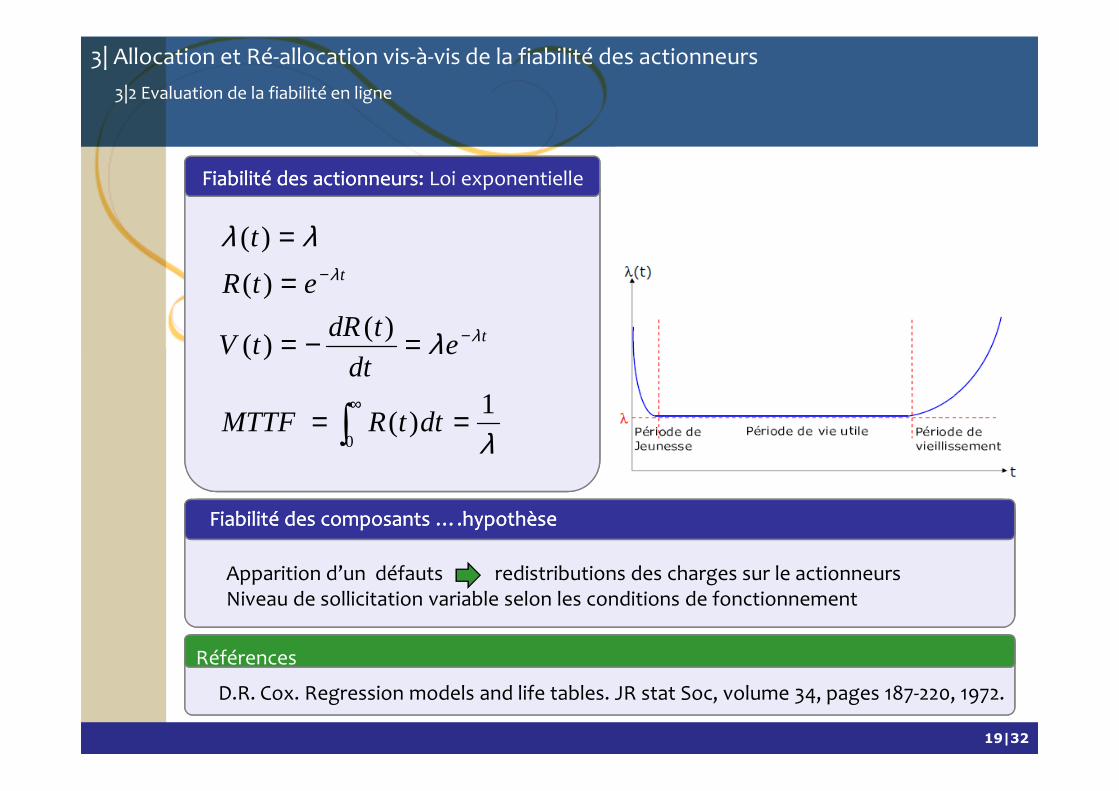
Fiabilité des actionneurs: Fiabilité des actionneurs: Loi exponentielle
∞
−
−
=−=
==
1
)()(
)(
)(
λ
λλ
λ
λ
edt
tdRtV
etR
t
t
t
19|32
∫∞
==0
1)(
λdttRMTTF
Fiabilité des composants ….hypothèseFiabilité des composants ….hypothèse
RéférencesRéférences
D.R. Cox. Regression models and life tables. JR stat Soc, volume 34, pages 187-220, 1972.
Apparition d’un défauts redistributions des charges sur le actionneursNiveau de sollicitation variable selon les conditions de fonctionnement
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|2 Evaluation de la fiabilité en ligne
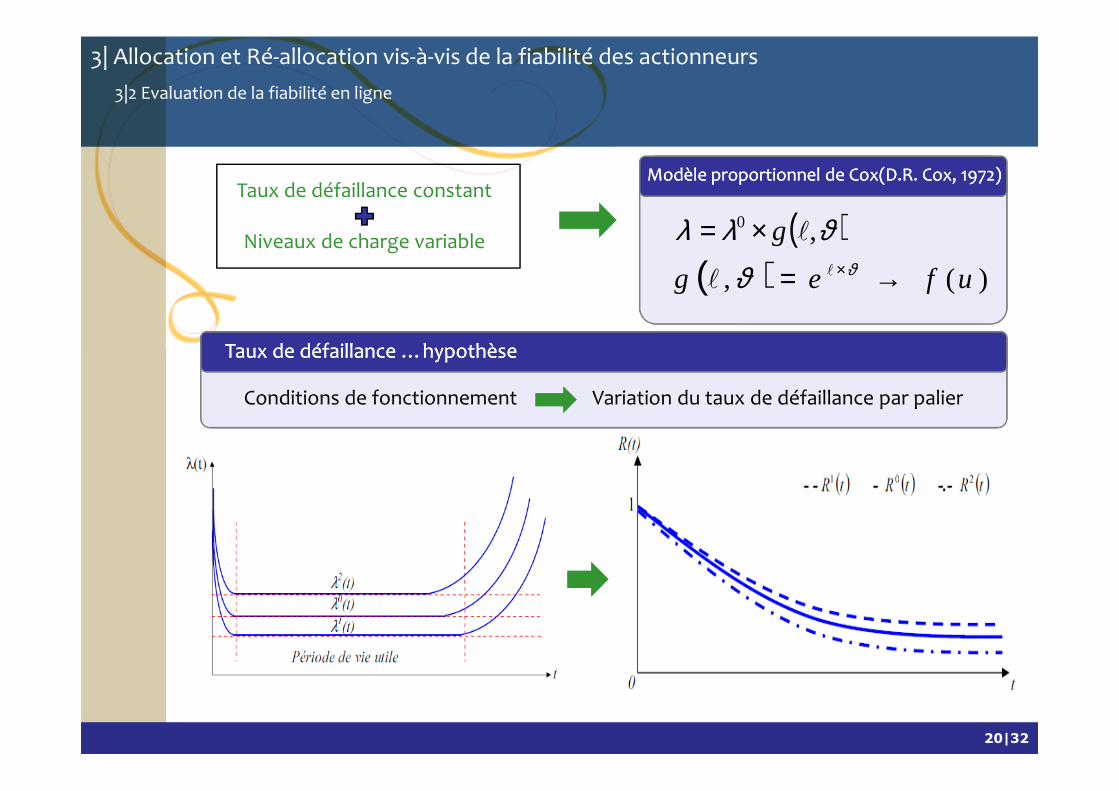
Modèle proportionnel de Cox(D.R. Cox, 1972)Modèle proportionnel de Cox(D.R. Cox, 1972)
( )ϑλλ ,0ℓg×=
( ) )(, ufeg →= ×ϑϑ ℓℓ
Taux de défaillance constant
Niveaux de charge variable
Taux de défaillance …hypothèseTaux de défaillance …hypothèse
Conditions de fonctionnement Variation du taux de défaillance par palier
20|32
Conditions de fonctionnement Variation du taux de défaillance par palier
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|2 Evaluation de la fiabilité en ligne
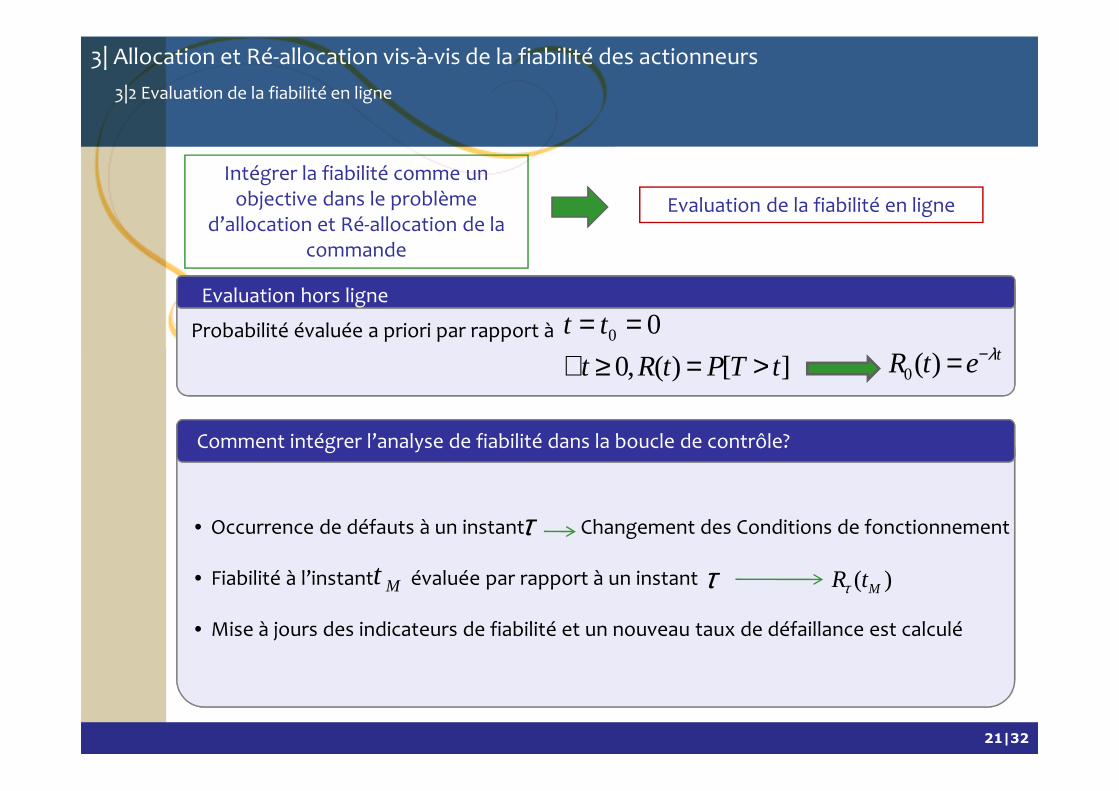
Intégrer la fiabilité comme un objective dans le problème
d’allocation et Ré-allocation de la commande
Evaluation de la fiabilité en ligne
Evaluation hors ligne
Probabilité évaluée a priori par rapport à
][)(,0 tTPtRt >=≥∀ tetR λ−=)(0
00 == tt
21|32
Comment intégrer l’analyse de fiabilité dans la boucle de contrôle?
• Occurrence de défauts à un instant Changement des Conditions de fonctionnement
• Fiabilité à l’instant évaluée par rapport à un instant
• Mise à jours des indicateurs de fiabilité et un nouveau taux de défaillance est calculé
)( MtRτMt τ
τ
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|2 Evaluation de la fiabilité en ligne
0.7
0.8
0.9
1Evolution de la fiabilité
R(t) Rτ(t)
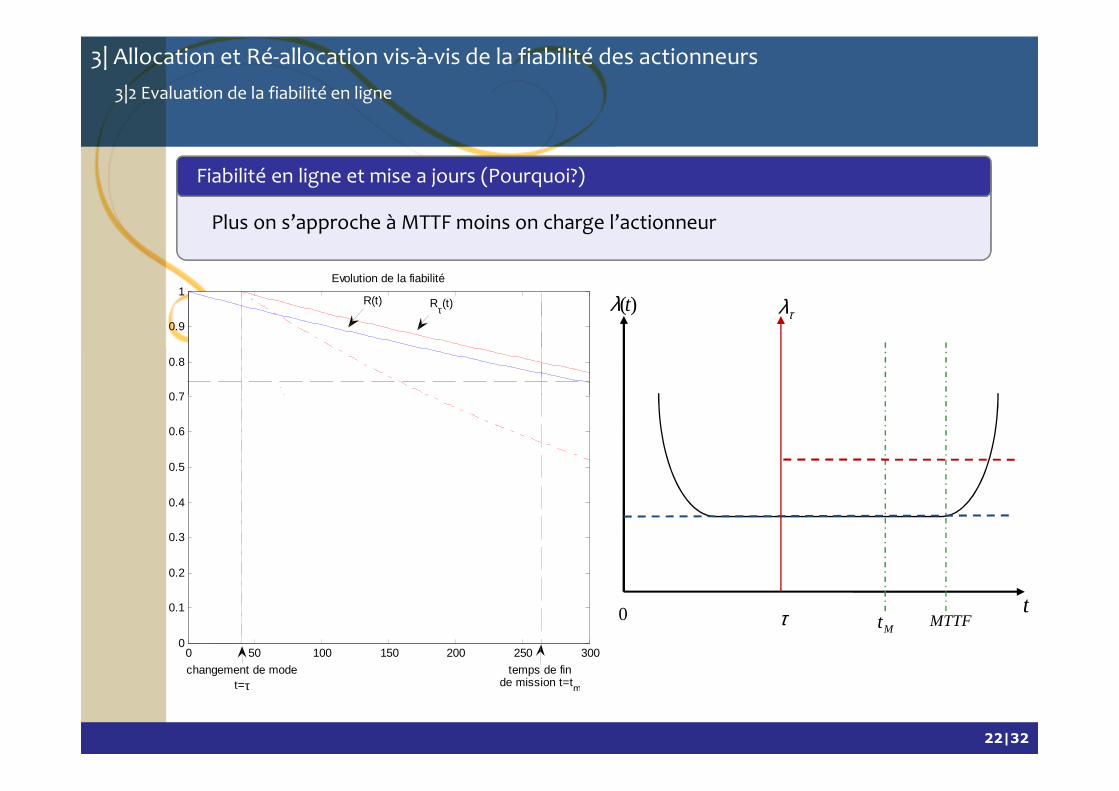
Fiabilité en ligne et mise a jours (Pourquoi?)
Plus on s’approche à MTTF moins on charge l’actionneur
)(tλ τλ
22|32
0 50 100 150 200 250 3000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
changement de modet=τ
temps de finde mission t=tm
Contrainte de fiabilitéR(tm)>Ropt
tMTTF
Mtτ0
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|2 Evaluation de la fiabilité en ligne
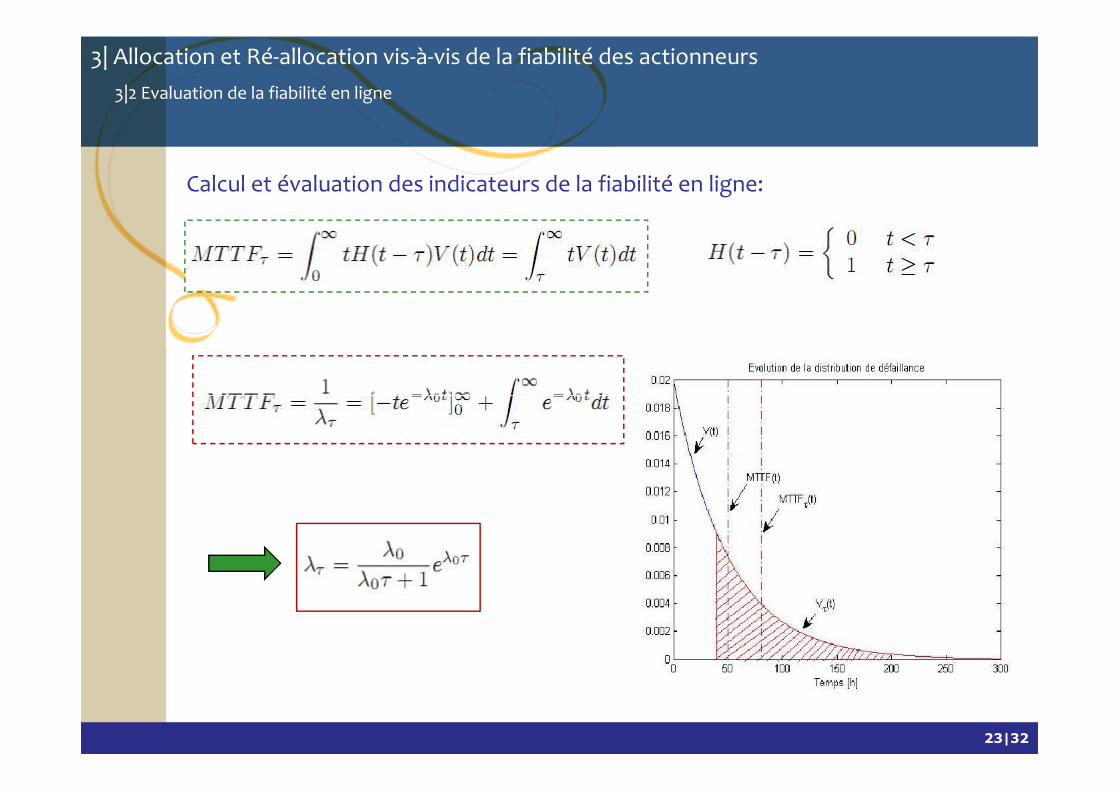
Calcul et évaluation des indicateurs de la fiabilité en ligne:
23|32
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|1 Problématique
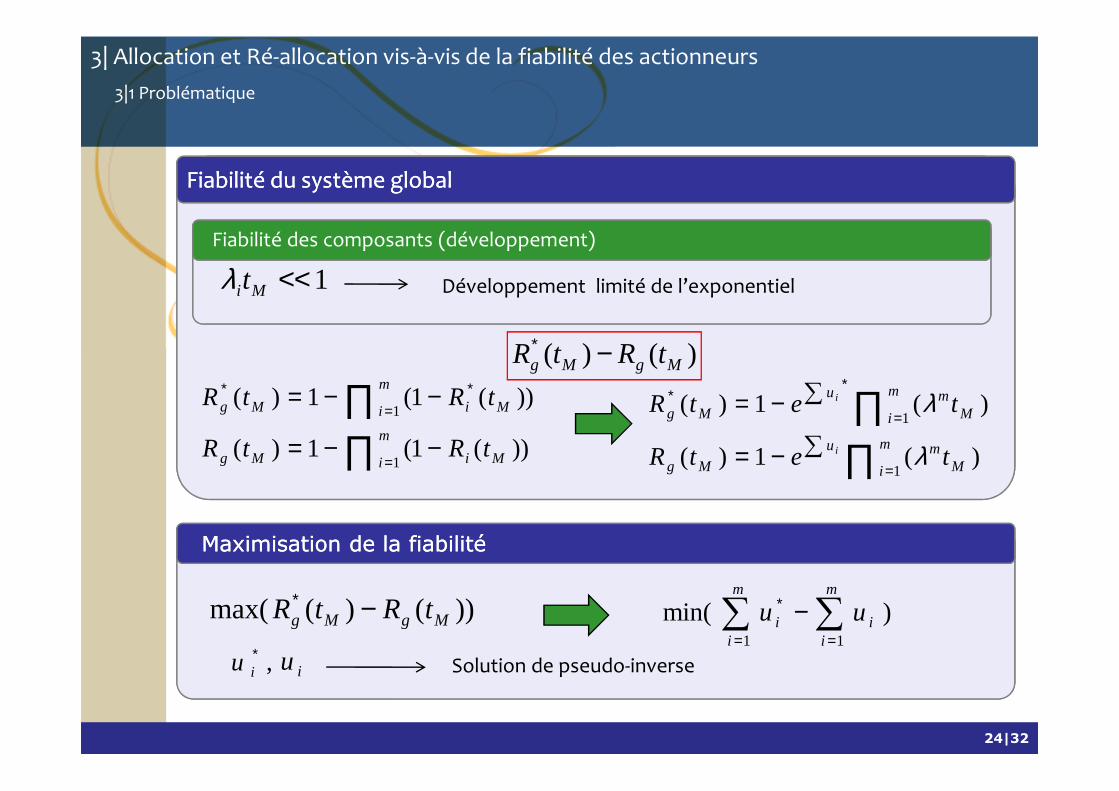
Fiabilité du système globalFiabilité du système global
∏ ∗∗ −−= mtRtR ))(1(1)( ∏
∗∗ ∑−= m mu
tetR i )(1)( λ
Fiabilité des composants (développement)
1<<Mitλ Développement limité de l’exponentiel
)()( MgMg tRtR −∗
24|32
Maximisation de la fiabilité Maximisation de la fiabilité
))()(max( MgMg tRtR −∗)min(
11∑∑
==
∗ −m
ii
m
ii uu
,∗iu iu Solution de pseudo-inverse
∏∏
=
=∗∗
−−=
−−=m
i MiMg
i MiMg
tRtR
tRtR
1
1
))(1(1)(
))(1(1)(
∏∏
=
=∗
∑−=
∑−=m
i Mmu
Mg
m
i Mmu
Mg
tetR
tetR
i
i
1
1
)(1)(
)(1)(
λ
λ
3| Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs
3|3 Approche développée
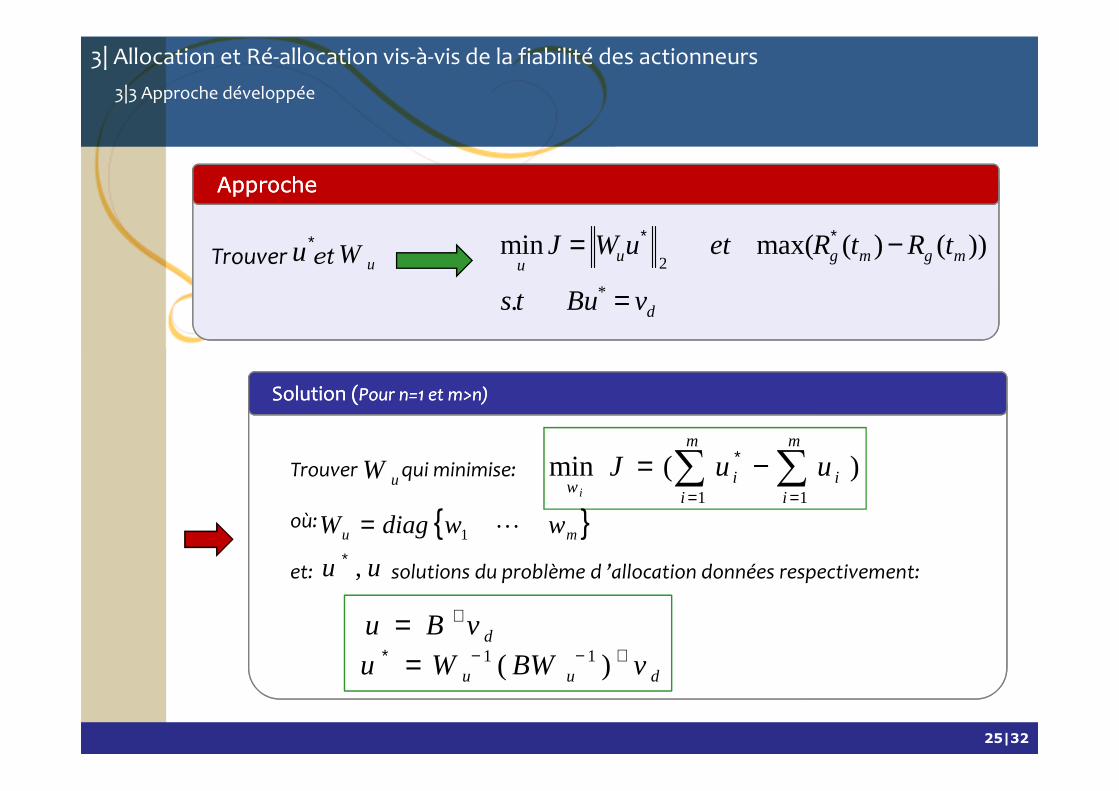
Approche Approche
Trouver et uW
d
mgmguu
vButs
tRtRetuWJ
=
−= ∗∗
*
2
.
))()(max(min
Solution (Solution (Pour n=1 et m>n)Pour n=1 et m>n)
∗u
25|32
Solution (Solution (Pour n=1 et m>n)Pour n=1 et m>n)
Trouver qui minimise:
où:
et: solutions du problème d ’allocation données respectivement:
uW )(min11∑∑
==
∗ −=m
ii
m
ii
wuuJ
i
{ }mu wwdiagW ⋯1=
uu ,∗
dvBu +=
duu vBWWu +−−∗ = )( 11
1 Allocation de la commande
2 Ré-allocation de la commande
3 Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs- Problématique
PLANPLAN
26|32
- Problématique - Evaluation de la fiabilité en ligne- Approche développée
4 Application
5 Conclusion et Perspectives
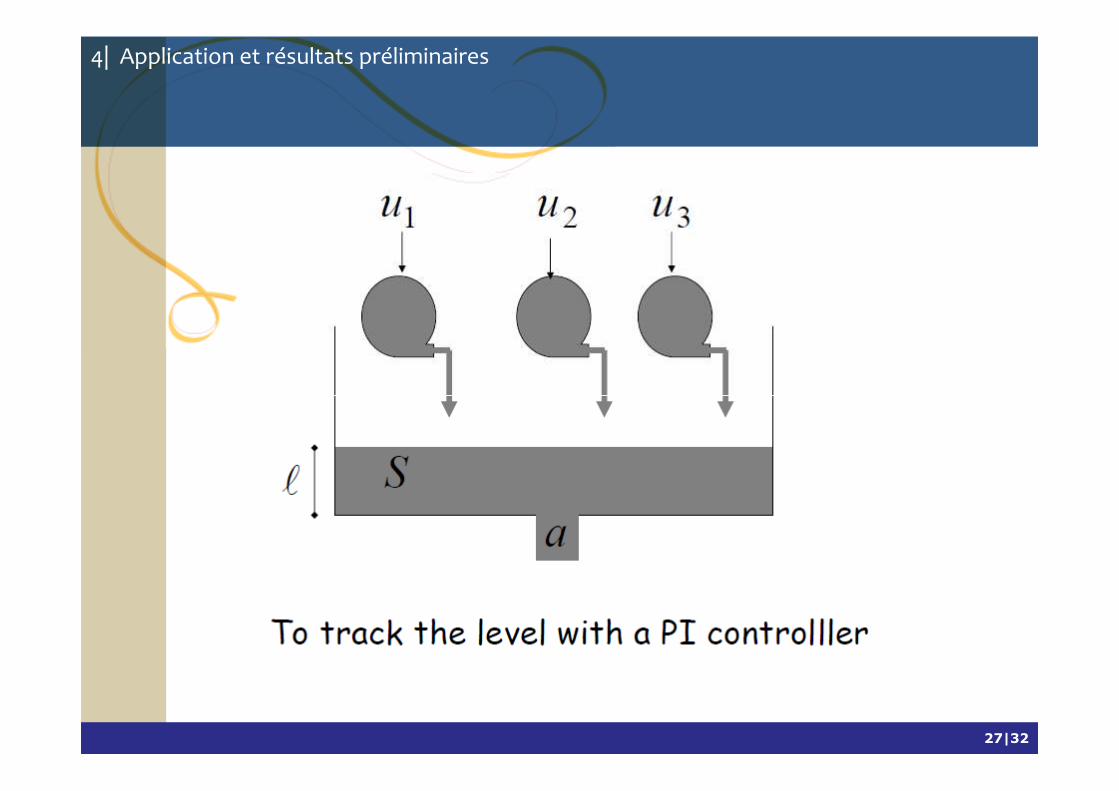
4| Application et résultats préliminaires
27|32
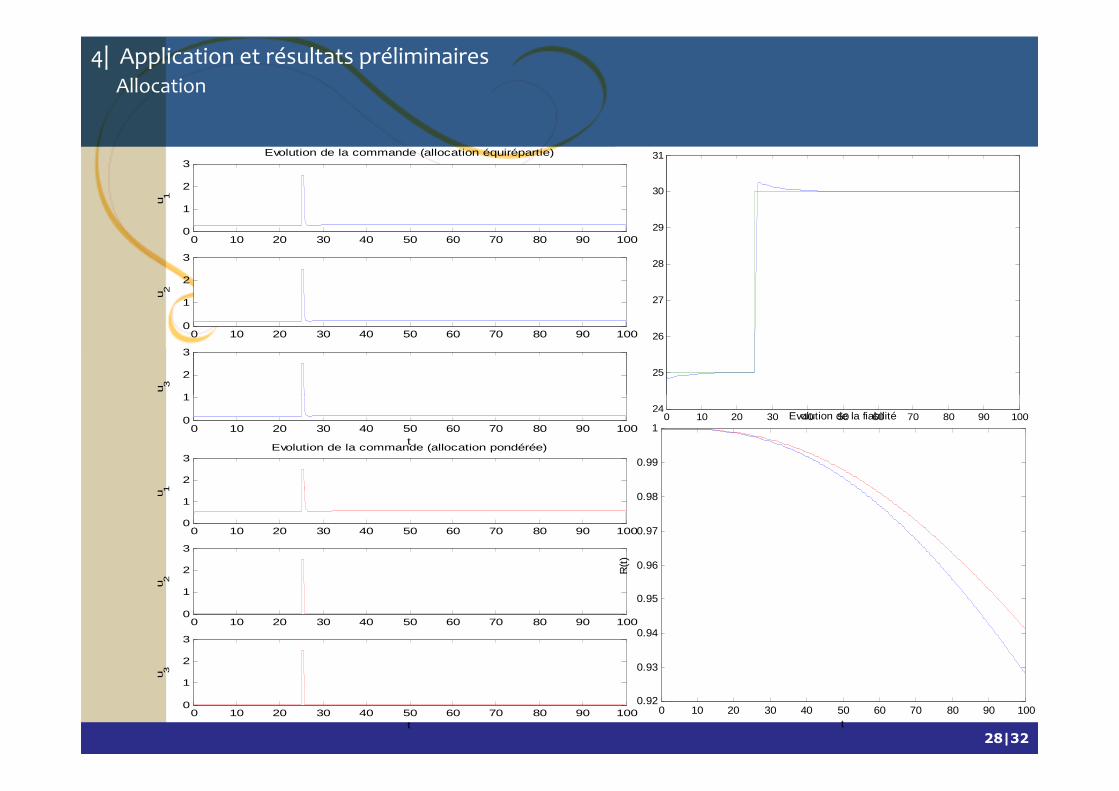
4| Application et résultats préliminaires Allocation
25
26
27
28
29
30
31
0 10 20 30 40 50 60 70 80 90 1000
1
2
3u 1
Evolution de la commande (allocation équirépartie)
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
u 2
1
2
3
u 3
28|32
0 10 20 30 40 50 60 70 80 90 10024
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
u 1
Evolution de la commande (allocation pondérée)
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
u 2
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
t
u 3
0 10 20 30 40 50 60 70 80 90 1000
1
t
0 10 20 30 40 50 60 70 80 90 1000.92
0.93
0.94
0.95
0.96
0.97
0.98
0.99
1
t
R(t
)
Evolution de la fiabilité
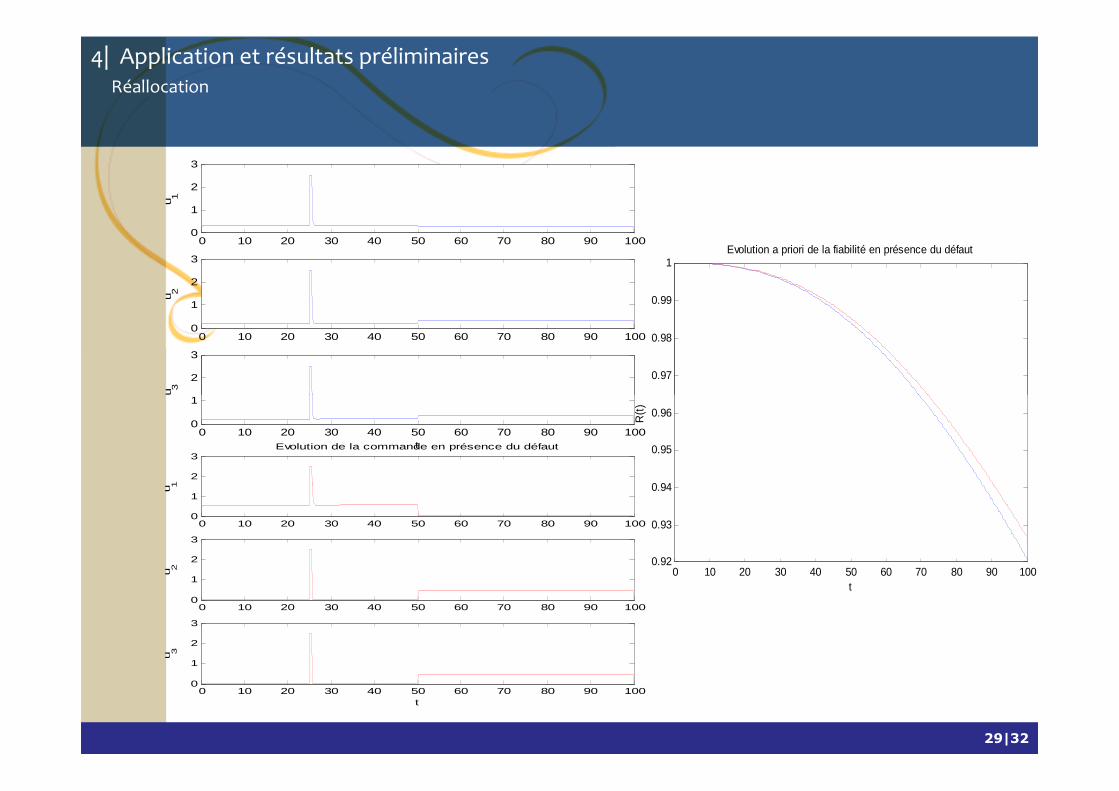
4| Application et résultats préliminaires Réallocation
0 10 20 30 40 50 60 70 80 90 1000
1
2
3u 1
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
u 2
1
2
3
u 3
0.97
0.98
0.99
1Evolution a priori de la fiabilité en présence du défaut
29|32
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
u 1
Evolution de la commande en présence du défaut
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
u 2
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
t
u 3
0 10 20 30 40 50 60 70 80 90 1000
1
t
0 10 20 30 40 50 60 70 80 90 1000.92
0.93
0.94
0.95
0.96
t
R(t
)
1 Allocation de la commande
2 Ré-allocation de la commande
3 Allocation et Ré-allocation vis-à-vis de la fiabilité des actionneurs- Problématique
PLANPLAN
30|32
- Problématique - Evaluation de la fiabilité en ligne- Approche développée
4 Application
5 Conclusion et Perspectives
5|Conclusion et perspective5|Conclusion et perspective
• Matrice de pondération : une clé pour intégrer la fiabilité comme objectif dans le problème d’allocation et de réallocation de la commande
• Intégrer la fiabilité comme objective dans l’allocation et ré-allocation
• Contribution aux systèmes tolérants aux fautes et fiables
Conclusion
31|32
• Fiabilisation des systèmes tolérants aux fautes
Perspective
• Intégration des hypothèses de vieillissement des composants
•Généralisation de la démarche pour les système MIMO
Synthèse d’une loi de commande optimale vis-à-vis de la fiabilité des systèmes sur-actionnés en présence de
défauts
A. Khelassi, P. Weber, D. [email protected]
Centre de Recherche en Automatique de NancyCRAN-CNRS UMR 7039
32|32
Centre de Recherche en Automatique de NancyCRAN-CNRS UMR 7039
Groupe: SURFDIAG
Articles
•Optimal reconfigurable control allocation design based on reliability analysis. D. Theilliol, A. Chamseddine, Y. Zhang and P. Weber. 7th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes. Spain, 2009.•On Reconfigurability for Actuator Faults under Reliability Constraints. A. Khelassi, D. Theilliol , P. Weber. IFAC Workshop on Automation in Mining, Mineral and Metal Industry- IFAC MMM’09 , Vina del Mar, Chile , 2009.• Reconfigurability Analysis for reliable Fault-Tolerant Control Design. A. Khelassi, D. Theilliol , P. Weber . Accepted in the 7th Workshop on advanced control and Diagnosis ACD’2009.





























