Embed Size (px)
Citation preview
MÉMOIRE
Réalisé par
Hatim EL YAZIDI et Younes CHOUKLAT
Dans le cadre du Projet de Fin d’Étude
Filière : Techniques d’Exploitation des Énergies Renouvelables Année : 2011/2012
Thème
SYSTÈME ÉLECTROMÉCANIQUE DE POURSUITE POUR UN CONCENTRATEUR SOLAIRE THERMIQUE
Soutenu le 29 Mai 2012 à 10H 00 devant la commission d'examen
H. Chaib Professeur, FPO, Ouarzazate Encadrant S. Elaimani Professeur, FPO, Ouarzazate Examinatrice M. Lmouchter Professeur, FPO, Ouarzazate Examinateur
2
RR EE MM EE RR CC II EE MM EE NN TT SS
Le présent travail a été réalisé au sein de la Faculté Polydisciplinaire de Ouarzazate dans le cadre du projet de fin d’étude de la Licence Professionnelle « Techniques d’Exploitation des Énergies Renouvelables ». Il a été dirigé par Monsieur H. Chaib, Professeur à la Faculté Polydisciplinaire de Ouarzazate.
Nous tenons à remercier en premier lieu ALLAH, le tout puissant, qui nous a donné le courage et la volonté pour bien mener ce modeste travail.
Nous remercions aussi tous les enseignants de la Faculté Polydisciplinaire de Ouarzazate, qui ont veillé de près ou de loin sur notre formation avec beaucoup de patience et d'intelligence mais aussi pour nous avoir supportés et encouragés au cours de ces années.
Nous tenons à remercier vivement les membres de jury qui nous ont fait l'honneur de nous bien vouloir juger ce travail.
Nous souhaitons que nos parents trouvent dans ce modeste mémoire une récompense à tout ce qu'ils ont donné d'eux-mêmes pour notre éducation. Enfin nous remercions tous nos amis qui de près ou de loin nous ont apporté leur aide au cours de nos études.
3
SS OO MM MM AA II RR EE
IINNTTRROODDUUCCTTIIOONN .............................................................................................................................................................................................................................................................................................. 55
CHAPITRE I : PROJET SOLAIRE MAROCAIN ...................................................................................... 6
I.1. INTRODUCTION .................................................................................................................................................. 6
I.2. PROGRAMME ÉNERGÉTIQUE MAROCAIN ........................................................................................................ 6
I.3. OUARZAZATE ET MASEN ................................................................................................................................ 7
I.4. RAISONS DU CHOIX DE PROJET ......................................................................................................................... 9
I.5. VARIANTES DES TECHNOLOGIES ..................................................................................................................... 9
I.5.1. Photovoltaïque ................................................................................................................................ 10
I.5.2. Solaire thermique à concentration (CSP)............................................................................. 11
I.6. CONCLUSION .................................................................................................................................................... 12
CHAPITRE II : CONCENTRATEUR SOLAIRE ...................................................................................... 13
II.1. INTRODUCTION ............................................................................................................................................... 13
II.2. CONSTITUTION DU CONCENTRATEUR SOLAIRE ......................................................................................... 13
II.2.1. Réflecteur .......................................................................................................................................... 14
II.2.2. Absorbeur ......................................................................................................................................... 15
II.2.3. Fluide caloporteur ......................................................................................................................... 16
II.2.4. Système de poursuite du soleil ................................................................................................. 16
II.3. CONCLUSION .................................................................................................................................................... 17
CHAPITRE III : SYSTÈME DE POURSUITE ........................................................................................... 18
III.1. INTRODUCTION ............................................................................................................................................... 18
III.2. POSITION DU SOLEIL ET ORIENTATION DE LA SURFACE RÉCEPTRICE .................................................... 18
III.2.1. Position du soleil par rapport à un observateur ............................................................... 18
III.2.2. Orientation de la surface réceptrice ....................................................................................... 19
III.2.2.1. Rotation suivant un axe .......................................................................................................... 19
III.2.2.2. Rotation suivant deux axes .................................................................................................... 21
III.2.3. Différents types de montures ................................................................................................... 21
III.2.3.1. Monture altazimutale .............................................................................................................. 21
III.2.3.2. Monture équatoriale ................................................................................................................ 22
III.3. CAPTEUR DU POSITION DU SOLEIL ............................................................................................................... 23
III.3.1. Forme du capteur ........................................................................................................................... 23
III.3.2. Cellules photosensibles ............................................................................................................... 24
III.3.3. Précision ............................................................................................................................................ 24
III.3.4. Circuit de conditionnement ....................................................................................................... 25
III.3.4.1. Pont de Wheatstone .................................................................................................................. 25
III.3.4.2. Amplificateur d’instrumentation ........................................................................................ 26
III.3.4.3. Montage final ............................................................................................................................... 27
III.4. CIRCUIT DE COMMANDE ................................................................................................................................ 27
III.4.1. Algorithme ........................................................................................................................................ 28
III.4.2. Processeur ........................................................................................................................................ 28
III.4.3. Périphériques .................................................................................................................................. 29
III.4.3.1. ADC ................................................................................................................................................... 29
III.4.3.2. PWM ................................................................................................................................................. 30
III.4.3.3. JTAG .................................................................................................................................................. 31
III.4.3.4. Carte finale .................................................................................................................................... 31
III.5. CARTE DE PUISSANCE ..................................................................................................................................... 32
4
III.5.1. Modélisation du moteur à courant continu ......................................................................... 32
III.5.2. Carte de puissance ......................................................................................................................... 34
III.6. CONCLUSION .................................................................................................................................................... 35
CCOONNCCLLUUSSIIOONN ...................................................................................................................................................................................................................................................................................................... 3366
BBIIBBLLIIOOGGRRAAPPHHIIEE ........................................................................................................................................................................................................................................................................................ 3377
5
II NN TT RR OO DD UU CC TT II OO NN
Les énergies renouvelables sont des énergies qui se renouvellent assez rapidement pour être considérées comme inépuisable à l’échelle humaine du temps. Face aux prévisions d’épuisement inévitable des ressources mondiales en énergie fossile (pétrole, gaz, charbon, etc.), en énergie d’origine thermonucléaire (uranium, plutonium, etc.), face aux multiples crises pétrolières, économiques, aux changements climatiques dus à l’effet de serre, la science s’est tout naturellement intéressée aux ressources dites « renouvelables » et notamment vers la plus ancienne, le soleil, qui déverse chaque jour l’équivalent de 100 000 milliards de TEP (tonnes équivalent pétrole). Cette valeur est à comparer aux 9,58 milliards de TEP que représente la consommation annuelle mondiale en énergie primaire (1998).
L'énergie joue un rôle fondamental dans le développement de la société, et elle se veut le pilier de son développement.
Au Maroc, la consommation de cette dernière s'est élevée à 13,7 de tonnes équivalent pétrole (TEP) en 2007 assurée essentiellement par les énergies fossiles (pétrole, gaz naturel et charbon).
En revanche, les ressources énergétiques sont dites menacées de pénurie pour 2050, et là une question se pose : est-ce que c'est le prix de la modernité à payer ?
Le Maroc n'a pas été insensible à ce sujet, il a œuvré à en chercher le remède incontournable, ce dernier se concrétise avec le lancement de plusieurs projets porteurs, le dernier en date est un projet de production d’énergie solaire à Ouarzazate par une puissance de 500MW.
Notre travailles est consacré a la réalisation d’un système de suivi (Tracking System) pour un concentrateur solaire thermique de type CSP.
Ce mémoire comporte Trois chapitres. Il est organisé de la façon suivante :
Le premier chapitre est consacré à une étude bibliographique sur le mégaprojet solaire d’Ouarzazate.
Dans le deuxième chapitre, nous exposerons les différents composants du concentrateur solaire thermique ainsi que le rôle du système de poursuite.
Dans le troisième chapitre, nous étudierons en détail un système de poursuite solaire.
Ce mémoire se termine par une conclusion.
6
CC HH AA PP II TT RR EE II :: PP RR OO JJ EE TT SS OO LL AA II RR EE MM AA RR OO CC AA II NN
I.1. INTRODUCTION
Le taux de dépendance énergétique marocain avec l’extérieur dépasse 90%. Le Maroc est donc amené à orienté sa politique énergétique vers la diversification des sources d’approvisionnement et la valorisation des sources nationales à travers la promotion de toutes les formes mobilisables d’énergies renouvelables, essentiellement hydraulique, éolienne et solaire.
I.2. PROGRAMME ÉNERGÉTIQUE MAROCAIN
Le mardi 26 octobre 2010, Sa Majesté le Roi Mohamed VI a présidé, au site du complexe énergétique solaire de Ouarzazate, la cérémonie de signature de conventions parachevant le cadre institutionnel de réalisation du projet intégré d'énergie électrique solaire d'une capacité de 2000 MW, confié à l'Agence « Moroccan Agency for Solar Energy (MASEN) ».
Cette cérémonie fait suite à la séance de travail présidée par le Souverain au Cabinet Royal, le 9 Octobre 2010, et au cours de laquelle Sa Majesté a donné Ses Hautes Instructions aux parties concernées pour s'en tenir strictement au calendrier de réalisation du plan solaire marocain.
A cette occasion, Mme Amina Benkhadra, Ministre de l'Énergie, des Mines, de l'Eau et de l'Environnement, a rappelé les étapes franchies dans la mise en œuvre des grands projets d'énergie renouvelable initiés dans le cadre de la stratégie énergétique du Royaume qui fait du développement des énergies renouvelables et de l'efficacité énergétique une priorité nationale.
La réalisation d'ici 2020 des deux programmes solaire et éolien de 2000 MW chacun, traduit la priorité accordée au développement des énergies renouvelables comme moyen optimal permettant au Maroc de répondre aux défis de la sécurité d'approvisionnement énergétique, de la préservation de l'environnement et du développement durable.
Ces projets ne sont pas limitatifs car les programmes de production d'électricité à partir de sources renouvelables sont largement ouverts à l'initiative privée nationale et internationale, comme le stipule la nouvelle loi 13-09 relative aux énergies renouvelables promulguée en février 2010.
Ainsi depuis le lancement de ce nouveau projet en Novembre 2009 par Sa Majesté le Roi, de nombreuses actions ont été réalisées relatives notamment à la mise en place d'un cadre législatif et institutionnel approprié.
De son côté, M. Mustapha Bakkoury, Président du Directoire de MASEN a présenté l'état d'avancement du plan solaire marocain de 2000 MW et les actions réalisées particulièrement pour la première centrale de 500 MW de Ouarzazate ainsi que les perspectives de développement du projet global.
7
En effet, le développement du complexe solaire de Ouarzazate qui sera réalisé sur une superficie de 2500 hectares, a franchi d'importantes étapes ayant permis de qualifier le site, de lancer l'appel à manifestation d'intérêt auquel ont participé 200 entreprises, d'étudier les configurations technologiques, d'élaborer les schémas institutionnel et de financement et d'enclencher le processus de pré-qualification des développeurs pour la conception, la construction, l'exploitation, la maintenance et le financement des centrales. 19 groupes internationaux ont été pré-qualifiés pour la réalisation de la centrale de Ouarzazate.
En outre, la cohérence de la vision de notre pays relative aux énergies renouvelables a favorisé l'adhésion de grandes institutions financières qui ont marqué un intérêt de principe pour le financement du projet à des conditions préférentielles.
Il est à préciser que les conventions signées, sous la Présidence Effective de Sa Majesté Le Roi, fixent le cadre d'intervention dans les différentes phases du Plan Solaire autant par l'État que par MASEN et l'ONE en sa qualité de partenaire stratégique dans la fourniture, le transport et l'export de l'énergie électrique qui sera produite par les centrales solaires.
La première convention, engageant l'Etat et MASEN, porte notamment sur l'assistance que doit fournir l'État pour faciliter la réalisation du programme en termes d'acquisition de terrains, d'exploitation des projets solaires et de leur financement et des actions qui doivent être menées par la société.
La deuxième convention, spécifie les aspects de réalisation des centrales solaires, leur fonctionnement, leur raccordement aux réseaux marocain et international ainsi que la commercialisation de l'énergie produite.
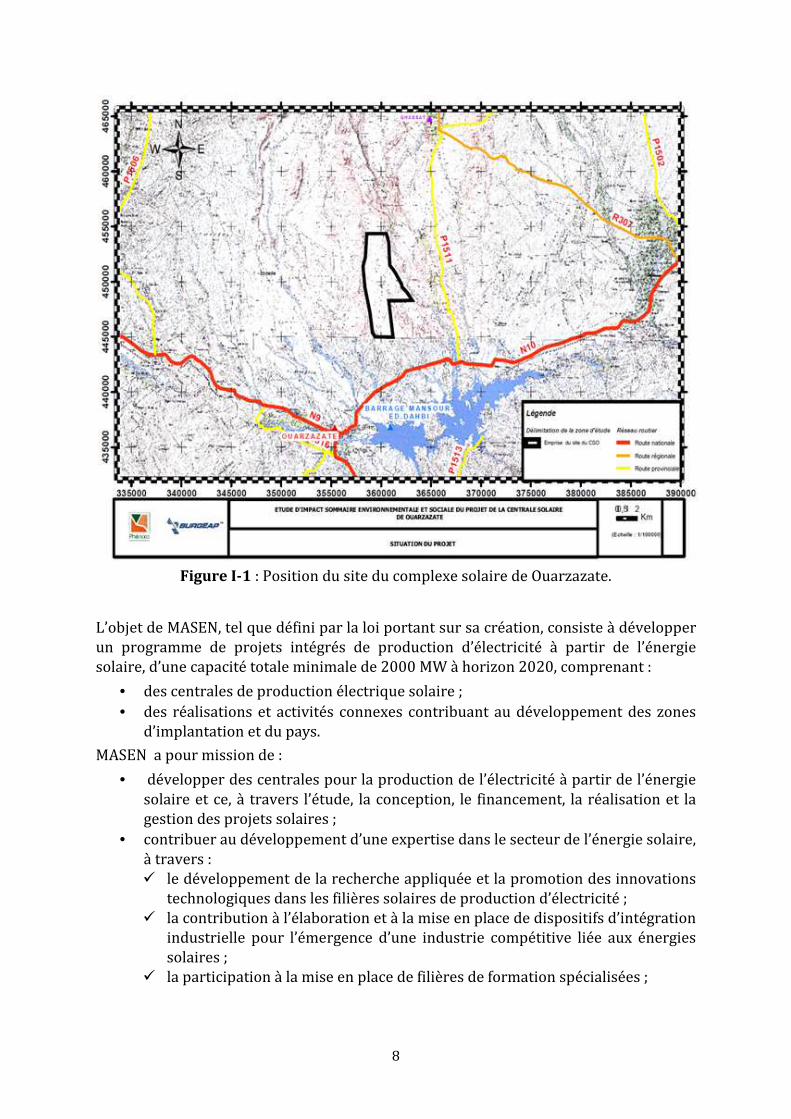
Le site du complexe solaire d’Ouarzazate sera situé à près de 10 km au nord-est d’Ouarzazate et à environ 4 km au nord du barrage Mansour Eddahbi (Figure I-1).
I.3. OUARZAZATE ET MASEN
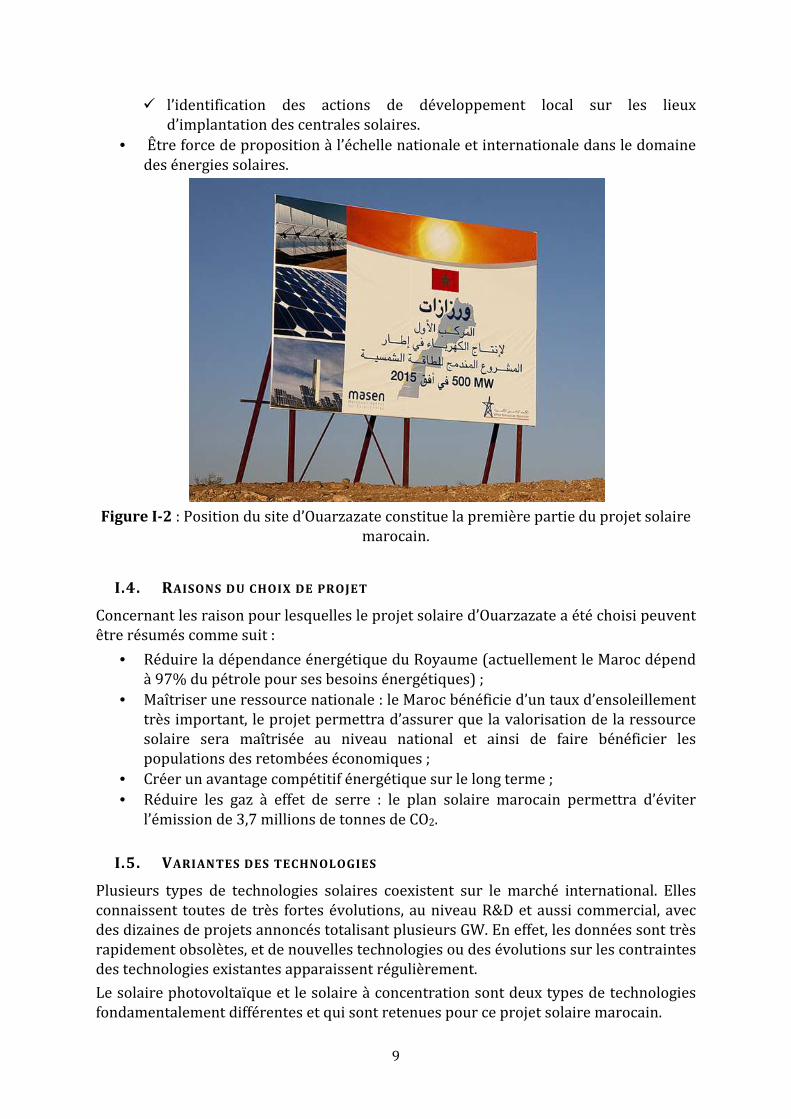
La ville de Ouarzazate a bénéficié de d’un projet vital de grande envergure, qui est relatif au lancement de la réalisation de la première station d'énergie solaire électrique. Ce projet permettra la production de 1150 GW par an avec une capacité de 500 MW. Ce projet, il faut le souligner, s'inscrit dans le plan solaire du Maroc et contribuera à la génération d'un nombre important de postes d'emploi en faveur de la population locale et contribuera, également, à la création d'une multitude d'activités parallèles. 25 MM de dirhams ont été débloqués pour la réalisation de ce projet. Cinq sites ont été identifiés pour le lancement de ce projet. Il s'agit des sites de Ouarzazate (Figure I-2), Ain Bni Mathar, Foum Al Oued, Boujdour et Sebkhat Tah.
D’acronyme MASEN, l’Agence Marocaine de l’Énergie Solaire (Moroccan Agency for Solar Energy) est une société anonyme à capitaux publics, a été créée en mars 2010 afin de porter le plan solaire marocain annoncé le 2 novembre 2009 à Ouarzazate sous la présidence de SM le Roi Mohammed VI.
Elle est détenue par l'État, le Fonds Hassan II pour le développement économique social, l’Office National de l'Électricité et la Société d'Investissements Énergétiques, un fonds public dédié à l'appui aux énergies.
8
Figure I-1 : Position du site du complexe solaire de Ouarzazate.
L’objet de MASEN, tel que défini par la loi portant sur sa création, consiste à développer un programme de projets intégrés de production d’électricité à partir de l’énergie solaire, d’une capacité totale minimale de 2000 MW à horizon 2020, comprenant :
• des centrales de production électrique solaire ; • des réalisations et activités connexes contribuant au développement des zones
d’implantation et du pays.
MASEN a pour mission de :
• développer des centrales pour la production de l’électricité à partir de l’énergie solaire et ce, à travers l’étude, la conception, le financement, la réalisation et la gestion des projets solaires ;
• contribuer au développement d’une expertise dans le secteur de l’énergie solaire, à travers : le développement de la recherche appliquée et la promotion des innovations
technologiques dans les filières solaires de production d’électricité ; la contribution à l’élaboration et à la mise en place de dispositifs d’intégration
industrielle pour l’émergence d’une industrie compétitive liée aux énergies solaires ;
la participation à la mise en place de filières de formation spécialisées ;
9
l’identification des actions de développement local sur les lieux d’implantation des centrales solaires.
• Être force de proposition à l’échelle nationale et internationale dans le domaine des énergies solaires.
Figure I-2 : Position du site d’Ouarzazate constitue la première partie du projet solaire marocain.
I.4. RAISONS DU CHOIX DE PROJET
Concernant les raison pour lesquelles le projet solaire d’Ouarzazate a été choisi peuvent être résumés comme suit :
• Réduire la dépendance énergétique du Royaume (actuellement le Maroc dépend à 97% du pétrole pour ses besoins énergétiques) ;
• Maîtriser une ressource nationale : le Maroc bénéficie d’un taux d’ensoleillement très important, le projet permettra d’assurer que la valorisation de la ressource solaire sera maîtrisée au niveau national et ainsi de faire bénéficier les populations des retombées économiques ;
• Créer un avantage compétitif énergétique sur le long terme ; • Réduire les gaz à effet de serre : le plan solaire marocain permettra d’éviter
l’émission de 3,7 millions de tonnes de CO2.
I.5. VARIANTES DES TECHNOLOGIES
Plusieurs types de technologies solaires coexistent sur le marché international. Elles connaissent toutes de très fortes évolutions, au niveau R&D et aussi commercial, avec des dizaines de projets annoncés totalisant plusieurs GW. En effet, les données sont très rapidement obsolètes, et de nouvelles technologies ou des évolutions sur les contraintes des technologies existantes apparaissent régulièrement.
Le solaire photovoltaïque et le solaire à concentration sont deux types de technologies fondamentalement différentes et qui sont retenues pour ce projet solaire marocain.
10
I.5.1. Photovoltaïque
Le solaire photovoltaïque permet de récupérer et de transformer directement la lumière du soleil en électricité par des panneaux photovoltaïques. La conversion directe de l'énergie solaire en électricité se fait par l'intermédiaire d'un matériau semi-conducteur.
La cellule photovoltaïque est un composant électronique qui est la base des installations produisant cette énergie.
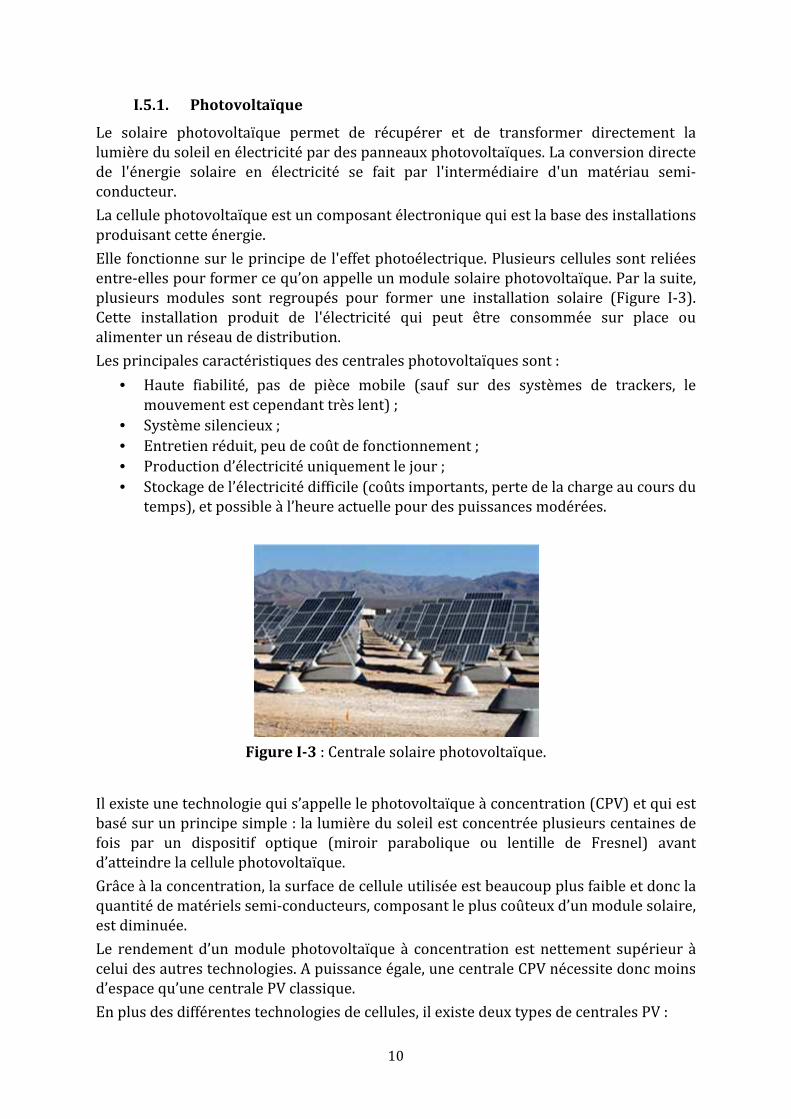
Elle fonctionne sur le principe de l'effet photoélectrique. Plusieurs cellules sont reliées entre-elles pour former ce qu’on appelle un module solaire photovoltaïque. Par la suite, plusieurs modules sont regroupés pour former une installation solaire (Figure I-3). Cette installation produit de l'électricité qui peut être consommée sur place ou alimenter un réseau de distribution.
Les principales caractéristiques des centrales photovoltaïques sont :
• Haute fiabilité, pas de pièce mobile (sauf sur des systèmes de trackers, le mouvement est cependant très lent) ;
• Système silencieux ; • Entretien réduit, peu de coût de fonctionnement ; • Production d’électricité uniquement le jour ; • Stockage de l’électricité difficile (coûts importants, perte de la charge au cours du
temps), et possible à l’heure actuelle pour des puissances modérées.
Figure I-3 : Centrale solaire photovoltaïque.
Il existe une technologie qui s’appelle le photovoltaïque à concentration (CPV) et qui est basé sur un principe simple : la lumière du soleil est concentrée plusieurs centaines de fois par un dispositif optique (miroir parabolique ou lentille de Fresnel) avant d’atteindre la cellule photovoltaïque.
Grâce à la concentration, la surface de cellule utilisée est beaucoup plus faible et donc la quantité de matériels semi-conducteurs, composant le plus coûteux d’un module solaire, est diminuée.
Le rendement d’un module photovoltaïque à concentration est nettement supérieur à celui des autres technologies. A puissance égale, une centrale CPV nécessite donc moins d’espace qu’une centrale PV classique.
En plus des différentes technologies de cellules, il existe deux types de centrales PV :
11
• Centrales PV fixes ; • Centrales solaires PV avec un système trackers d’un axe ou de deux axes ou «
suiveurs solaires » (permettant de suivre la course du soleil).
Ces dernières peuvent permettre d’augmenter la productivité de la centrale avec plus de 40% par rapport aux centrales solaires PV traditionnelles.
I.5.2. Solaire thermique à concentration (CSP)
On distingue 4 technologies dans le solaire thermique à concentration, qui se distinguent principalement par leurs types de capteurs.
Deux familles de capteurs :
• Concentrateurs ponctuels (comprenant les tours solaires et les capteurs paraboliques) : ils concentrent la chaleur en un point, ce qui permet d’obtenir des températures élevées et donc de bons rendements thermodynamiques. Afin d’assurer la continuité de son fonctionnement, les capteurs de ce type doivent se déplacer selon deux axes, pour suivre le mouvement du soleil.
• Concentrateurs linéaires (cylindro-paraboliques ou miroirs de Fresnel) : la concentration du rayonnement solaire ne se fait plus en un point unique mais sur une ligne. Cependant, les flux et températures sont donc plus faibles et le mouvement du capteur ne se fait que selon un seul axe.
Deux technologies de solaire à concentration ont été retenues pour le projet de Ouarzazate : la technologie des miroirs cylindro-paraboliques et les centrales solaires à tour :
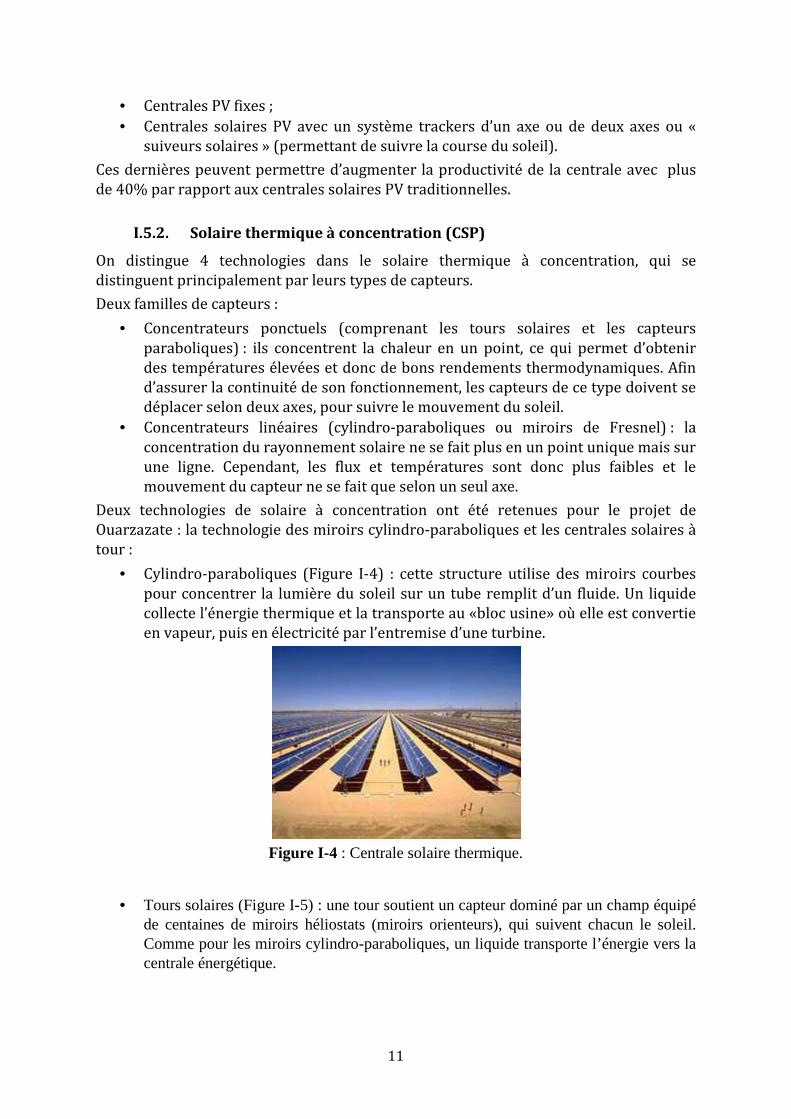
• Cylindro-paraboliques (Figure I-4) : cette structure utilise des miroirs courbes pour concentrer la lumière du soleil sur un tube remplit d’un fluide. Un liquide collecte l’énergie thermique et la transporte au «bloc usine» où elle est convertie en vapeur, puis en électricité par l’entremise d’une turbine.
Figure I-4 : Centrale solaire thermique.
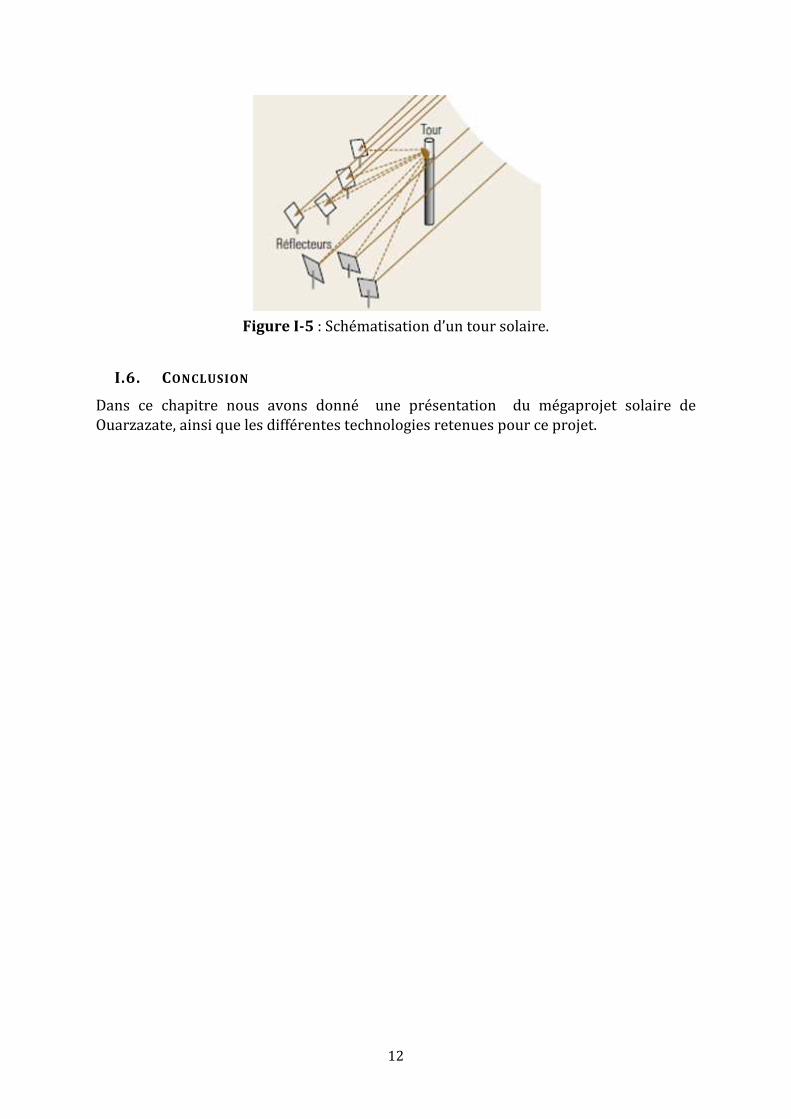
• Tours solaires (Figure I-5) : une tour soutient un capteur dominé par un champ équipé de centaines de miroirs héliostats (miroirs orienteurs), qui suivent chacun le soleil. Comme pour les miroirs cylindro-paraboliques, un liquide transporte l’énergie vers la centrale énergétique.
12
Figure I-5 : Schématisation d’un tour solaire.
I.6. CONCLUSION
Dans ce chapitre nous avons donné une présentation du mégaprojet solaire de Ouarzazate, ainsi que les différentes technologies retenues pour ce projet.
13
CC HH AA PP II TT RR EE II II :: CC OO NN CC EE NN TT RR AA TT EE UU RR SS OO LL AA II RR EE
II.1. INTRODUCTION
La concentration d’énergie est importante car elle rend la vie beaucoup plus facile. On dispose en effet avec le soleil d’une énorme quantité d’énergie potentiellement utilisable et une fois concentrée, une masse d’énergie est bien plus simple à stocker, transformer et déplacer. Même s’il y a des exceptions, un accès à de très fortes concentrations d’énergie permet dans la plupart des cas de faire à peu près ce qu’on veut avec un minimum de puissance.
II.2. CONSTITUTION DU CONCENTRATEUR SOLAIRE
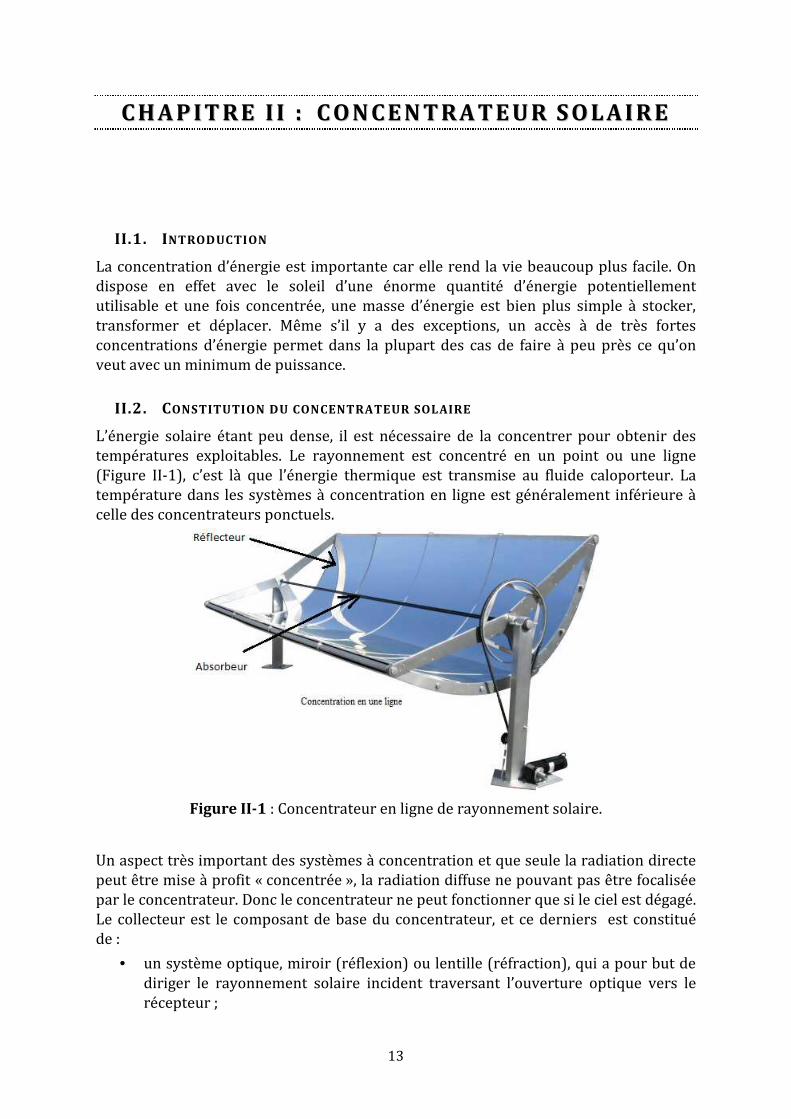
L’énergie solaire étant peu dense, il est nécessaire de la concentrer pour obtenir des températures exploitables. Le rayonnement est concentré en un point ou une ligne (Figure II-1), c’est là que l’énergie thermique est transmise au fluide caloporteur. La température dans les systèmes à concentration en ligne est généralement inférieure à celle des concentrateurs ponctuels.
Figure II-1 : Concentrateur en ligne de rayonnement solaire.
Un aspect très important des systèmes à concentration et que seule la radiation directe peut être mise à profit « concentrée », la radiation diffuse ne pouvant pas être focalisée par le concentrateur. Donc le concentrateur ne peut fonctionner que si le ciel est dégagé. Le collecteur est le composant de base du concentrateur, et ce derniers est constitué de :
• un système optique, miroir (réflexion) ou lentille (réfraction), qui a pour but de diriger le rayonnement solaire incident traversant l’ouverture optique vers le récepteur ;
14
• un récepteur formé par l’absorbeur et éventuellement une couverture transparente, une isolation, etc. ;
• un circuit hydraulique.
Donc, souvent il faut les doter d’un mécanisme de poursuite du soleil : c.-à.-d. un ou deux axes de rotation.
II.2.1. Réflecteur
Le réflecteur (Figure II-1) a pour rôle de concentrer sur l’absorbeur le rayonnement reçu. L’utilisation d’un réflecteur permet de diminuer la taille de l’absorbeur ce qui réduit les pertes de chaleur, augmente son efficacité et permet aussi de diminuer le prix (les réflecteurs sont moins coûteux, par unité de surface que les capteurs).
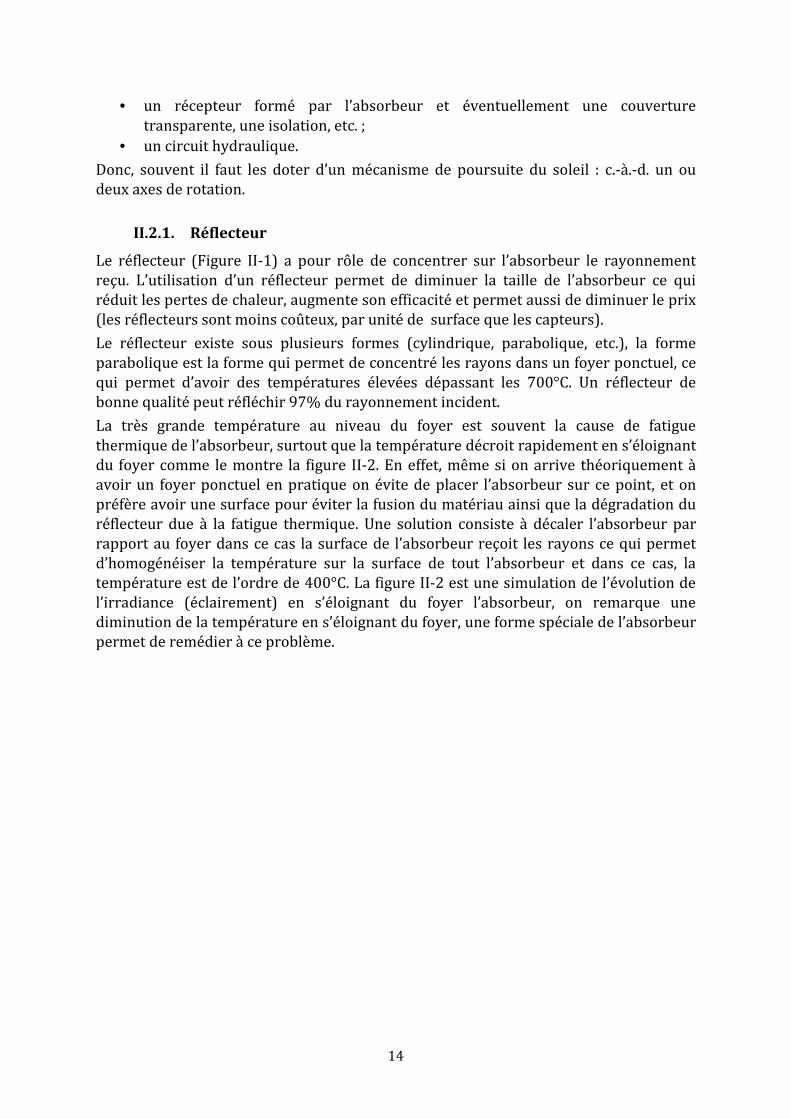
Le réflecteur existe sous plusieurs formes (cylindrique, parabolique, etc.), la forme parabolique est la forme qui permet de concentré les rayons dans un foyer ponctuel, ce qui permet d’avoir des températures élevées dépassant les 700°C. Un réflecteur de bonne qualité peut réfléchir 97% du rayonnement incident.
La très grande température au niveau du foyer est souvent la cause de fatigue thermique de l’absorbeur, surtout que la température décroit rapidement en s’éloignant du foyer comme le montre la figure II-2. En effet, même si on arrive théoriquement à avoir un foyer ponctuel en pratique on évite de placer l’absorbeur sur ce point, et on préfère avoir une surface pour éviter la fusion du matériau ainsi que la dégradation du réflecteur due à la fatigue thermique. Une solution consiste à décaler l’absorbeur par rapport au foyer dans ce cas la surface de l’absorbeur reçoit les rayons ce qui permet d’homogénéiser la température sur la surface de tout l’absorbeur et dans ce cas, la température est de l’ordre de 400°C. La figure II-2 est une simulation de l’évolution de l’irradiance (éclairement) en s’éloignant du foyer l’absorbeur, on remarque une diminution de la température en s’éloignant du foyer, une forme spéciale de l’absorbeur permet de remédier à ce problème.
15
Figure II-2 : Évolution de l’irradiance du rayonnement concentré en fonction de la distance au foyer du concentrateur.
II.2.2. Absorbeur
L’absorbeur absorbe l’énergie réfléchie par le concentrateur et la transfère au fluide caloporteur. Son coefficient d’absorption doit être aussi élevé que possible afin d’éviter toute réflexion du rayonnement incident. Un alliage de cuivre est utilisé pour réaliser le capteur, en effet avec un revêtement spéciale « dépôt électrolytique » on arrive à atteindre jusqu’à 90% de rendement.
Pour limiter les pertes au niveau du capteur ainsi que l’oxydation du cuivre, l’absorbeur est entouré de verre sous vide.
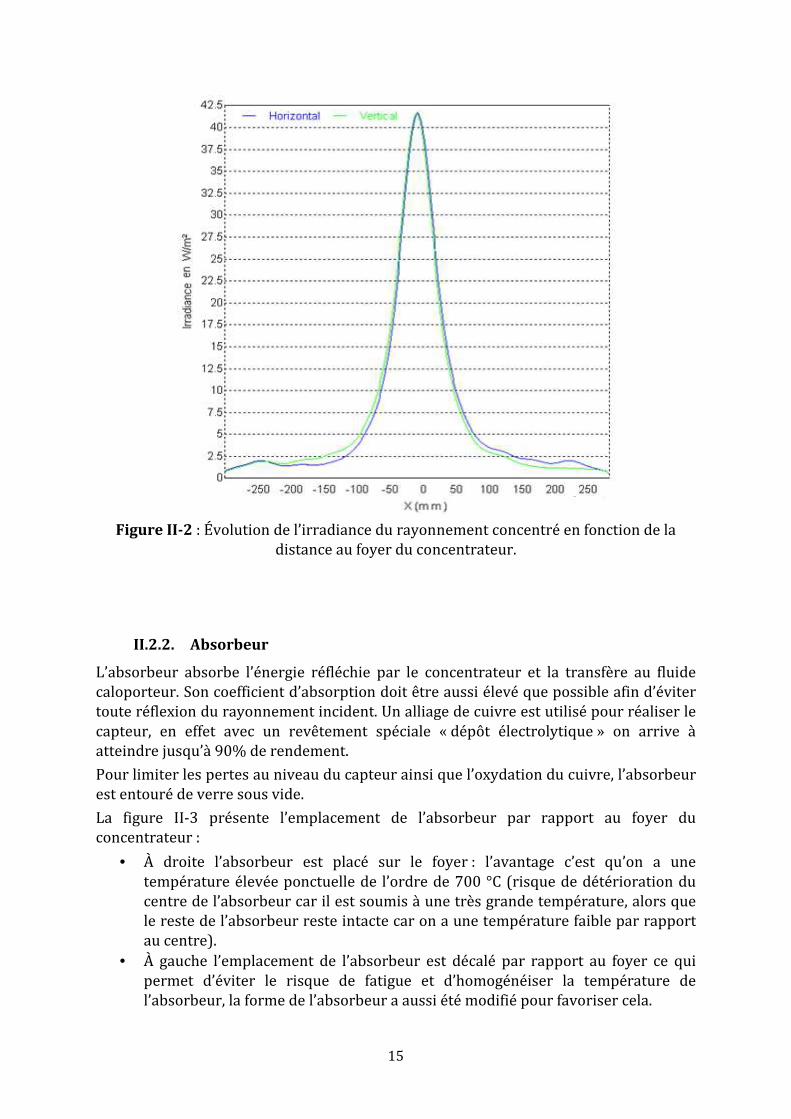
La figure II-3 présente l’emplacement de l’absorbeur par rapport au foyer du concentrateur :
• À droite l’absorbeur est placé sur le foyer : l’avantage c’est qu’on a une température élevée ponctuelle de l’ordre de 700 °C (risque de détérioration du centre de l’absorbeur car il est soumis à une très grande température, alors que le reste de l’absorbeur reste intacte car on a une température faible par rapport au centre).
• À gauche l’emplacement de l’absorbeur est décalé par rapport au foyer ce qui permet d’éviter le risque de fatigue et d’homogénéiser la température de l’absorbeur, la forme de l’absorbeur a aussi été modifié pour favoriser cela.
16
Figure II-3 : Emplacement de l’absorbeur par rapport au foyer du concentrateur.
II.2.3. Fluide caloporteur
Le fluide caloporteur sert à transporter l’énergie absorbé par l’absorbeur vers le ballon d’eau. Les fluides les plus utilisé sont des huiles ou de l’eau auquel on ajoute un antigel. Le fluide caloporteur circule dans un circuit primaire, à l’aide d’une pompe électromécanique, il est choisi en fonction de ces propriétés physico-chimiques telles que la viscosité, capacité thermique volumique, chaleur latente de vaporisation, la conduction thermique et le coût.
Les conditions climatiques interviennent souvent dans le choix du fluide caloporteur car il risque de geler pour des températures basses par exemple, dans ce cas une phase de préchauffage du fluide est indispensable.
II.2.4. Système de poursuite du soleil
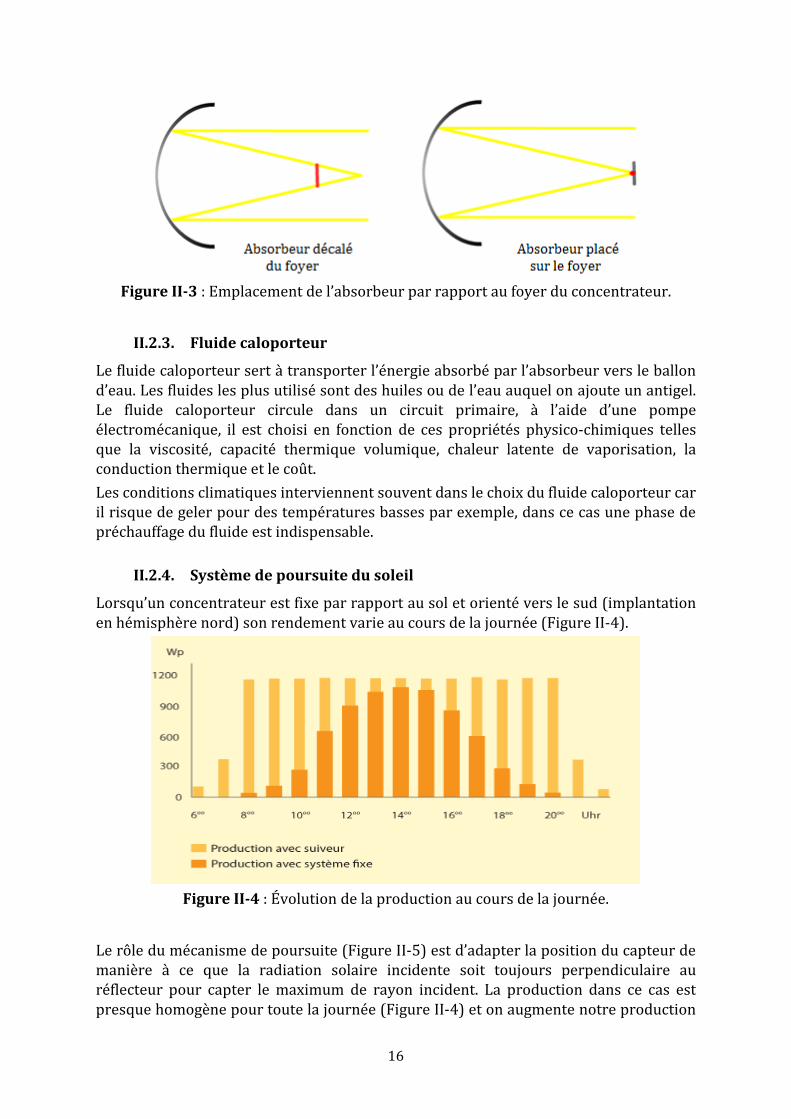
Lorsqu’un concentrateur est fixe par rapport au sol et orienté vers le sud (implantation en hémisphère nord) son rendement varie au cours de la journée (Figure II-4).
Figure II-4 : Évolution de la production au cours de la journée.
Le rôle du mécanisme de poursuite (Figure II-5) est d’adapter la position du capteur de manière à ce que la radiation solaire incidente soit toujours perpendiculaire au réflecteur pour capter le maximum de rayon incident. La production dans ce cas est presque homogène pour toute la journée (Figure II-4) et on augmente notre production
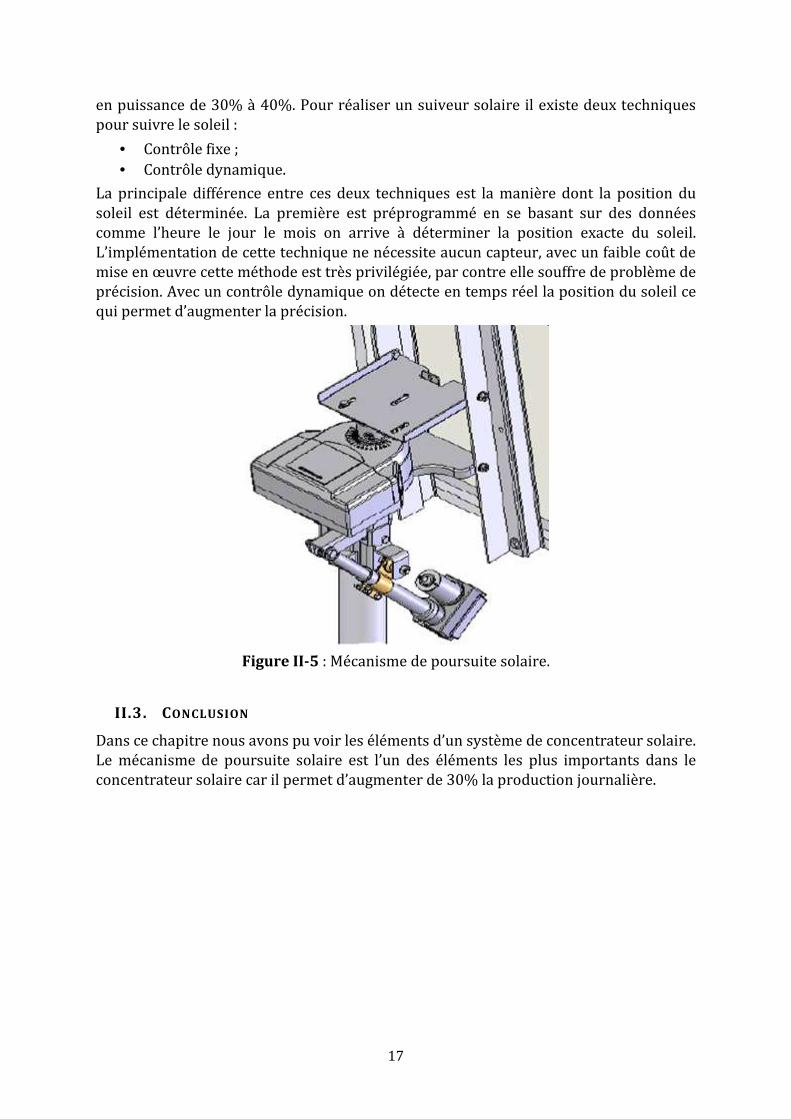
17
en puissance de 30% à 40%. Pour réaliser un suiveur solaire il existe deux techniques pour suivre le soleil :
• Contrôle fixe ; • Contrôle dynamique.
La principale différence entre ces deux techniques est la manière dont la position du soleil est déterminée. La première est préprogrammé en se basant sur des données comme l’heure le jour le mois on arrive à déterminer la position exacte du soleil. L’implémentation de cette technique ne nécessite aucun capteur, avec un faible coût de mise en œuvre cette méthode est très privilégiée, par contre elle souffre de problème de précision. Avec un contrôle dynamique on détecte en temps réel la position du soleil ce qui permet d’augmenter la précision.
Figure II-5 : Mécanisme de poursuite solaire.
II.3. CONCLUSION
Dans ce chapitre nous avons pu voir les éléments d’un système de concentrateur solaire. Le mécanisme de poursuite solaire est l’un des éléments les plus importants dans le concentrateur solaire car il permet d’augmenter de 30% la production journalière.

18
CC HH AA PP II TT RR EE II II II :: SS YY SS TT ÈÈ MM EE DD EE PP OO UU RR SS UU II TT EE
III.1. INTRODUCTION
L’orientation des capteurs est un problème important dans l’utilisation des capteurs à rayonnement concentré. En effet, le principe même de la concentration suppose que le rayonnement parvienne à la surface réfléchissante dans une direction déterminée.
Puisque la position apparente du soleil par rapport à un point de captation est constamment variable à l’échelle d’une journée, nous serons donc obligés de modifier constamment la position du concentrateur afin de suivre celle du soleil en utilisant un système de poursuite automatique.
III.2. POSITION DU SOLEIL ET ORIENTATION DE LA SURFACE RÉCEPTRICE
III.2.1. Position du soleil par rapport à un observateur
L’énergie solaire que reçoit une surface est régie uniquement par des lois astronomiques et géométriques. Ces dernières faisant intervenir la latitude de lieu, la déclinaison solaire, l’heure du jour et enfin l’orientation de la surface réceptrice. La position du soleil dépend du temps solaire, du numéro du jour et de l’année, elle est exprimée par différents angles :
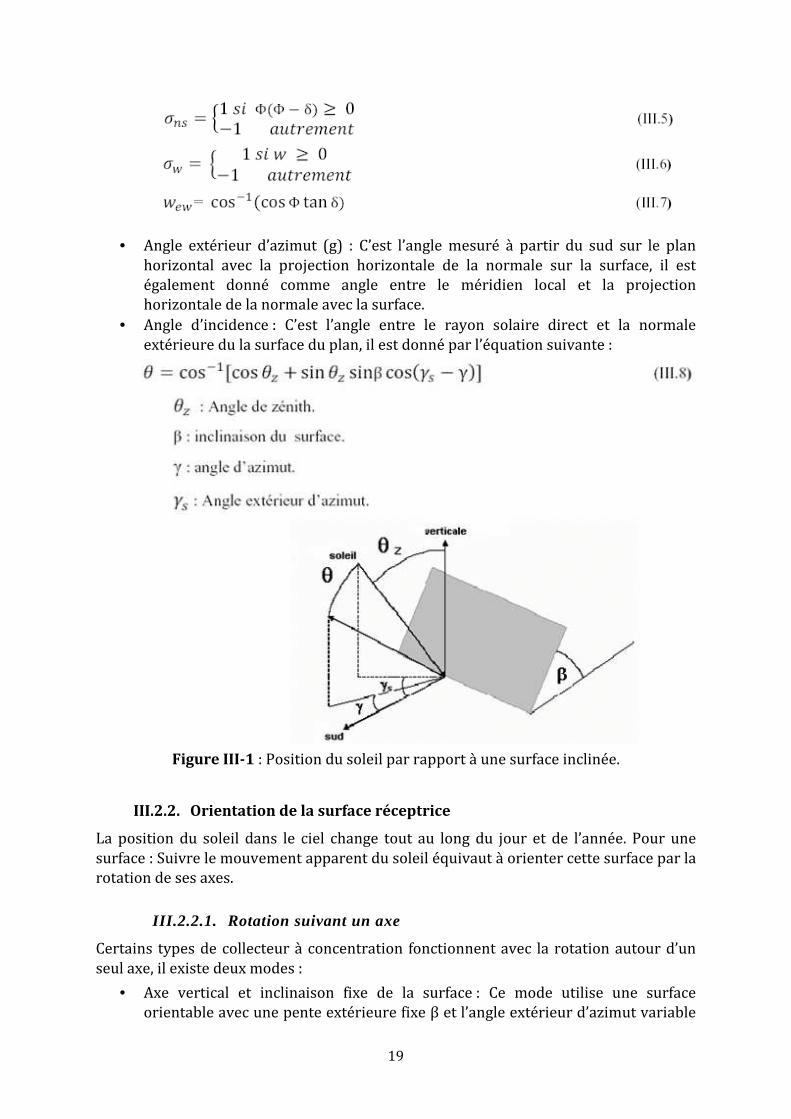
• Angle de zénith : C’est l’angle entre la verticale d’une surface est un rayon du soleil, il est donné par l’équation suivante :
• Angle d’azimut : C’est l’angle sur le plan horizontal mesuré à partir du sud avec la projection horizontale des rayons directs du soleil. Il est également donné comme angle entre le méridien local et la projection de la ligne de la vue du soleil dans le plan horizontal, défini par l’équation suivante :
19
• Angle extérieur d’azimut (g) : C’est l’angle mesuré à partir du sud sur le plan
horizontal avec la projection horizontale de la normale sur la surface, il est également donné comme angle entre le méridien local et la projection horizontale de la normale avec la surface.
• Angle d’incidence : C’est l’angle entre le rayon solaire direct et la normale extérieure du la surface du plan, il est donné par l’équation suivante :
Figure III-1 : Position du soleil par rapport à une surface inclinée.
III.2.2. Orientation de la surface réceptrice
La position du soleil dans le ciel change tout au long du jour et de l’année. Pour une surface : Suivre le mouvement apparent du soleil équivaut à orienter cette surface par la rotation de ses axes.
III.2.2.1. Rotation suivant un axe
Certains types de collecteur à concentration fonctionnent avec la rotation autour d’un seul axe, il existe deux modes :
• Axe vertical et inclinaison fixe de la surface : Ce mode utilise une surface orientable avec une pente extérieure fixe β et l’angle extérieur d’azimut variable
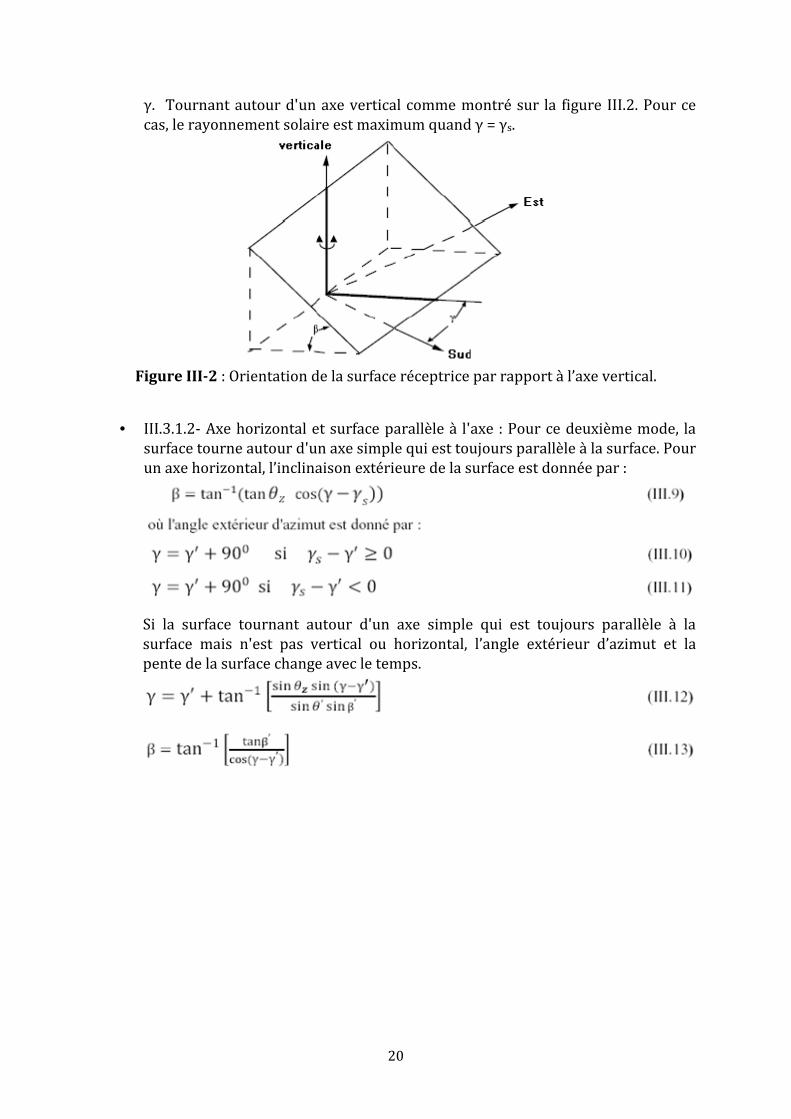
20
γ. Tournant autour d'un axe vertical comme montré sur la figure III.2. Pour ce cas, le rayonnement solaire est maximum quand γ = γѕ.
Figure III-2 : Orientation de la surface réceptrice par rapport à l’axe vertical.
• III.3.1.2- Axe horizontal et surface parallèle à l'axe : Pour ce deuxième mode, la surface tourne autour d'un axe simple qui est toujours parallèle à la surface. Pour un axe horizontal, l’inclinaison extérieure de la surface est donnée par :
Si la surface tournant autour d'un axe simple qui est toujours parallèle à la surface mais n'est pas vertical ou horizontal, l’angle extérieur d’azimut et la pente de la surface change avec le temps.
21
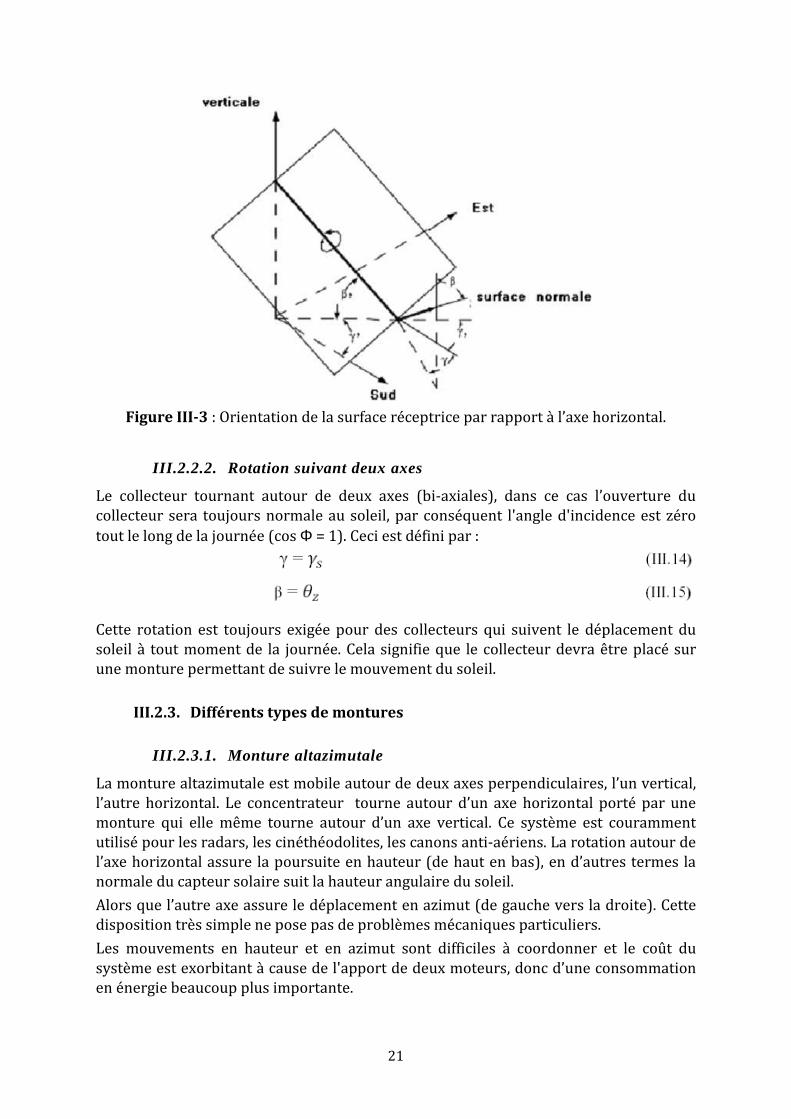
Figure III-3 : Orientation de la surface réceptrice par rapport à l’axe horizontal.
III.2.2.2. Rotation suivant deux axes
Le collecteur tournant autour de deux axes (bi-axiales), dans ce cas l’ouverture du collecteur sera toujours normale au soleil, par conséquent l'angle d'incidence est zéro tout le long de la journée (cos Φ = 1). Ceci est défini par :
Cette rotation est toujours exigée pour des collecteurs qui suivent le déplacement du soleil à tout moment de la journée. Cela signifie que le collecteur devra être placé sur une monture permettant de suivre le mouvement du soleil.
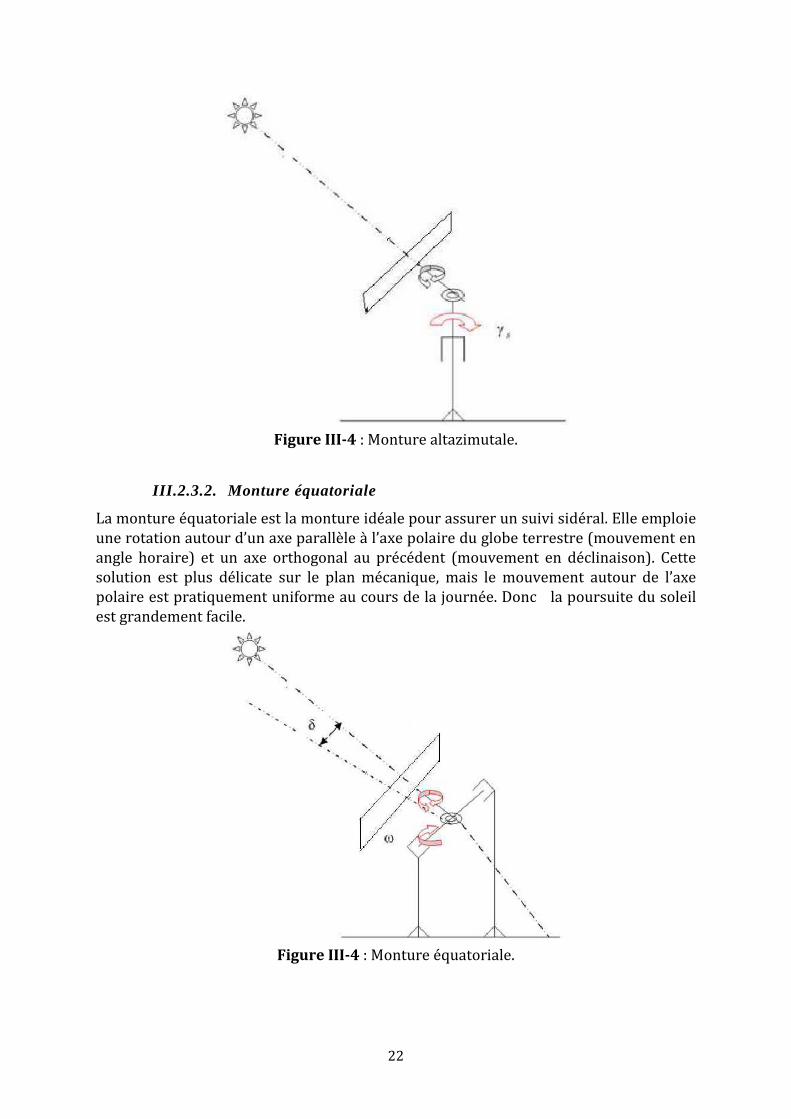
III.2.3. Différents types de montures
III.2.3.1. Monture altazimutale
La monture altazimutale est mobile autour de deux axes perpendiculaires, l’un vertical, l’autre horizontal. Le concentrateur tourne autour d’un axe horizontal porté par une monture qui elle même tourne autour d’un axe vertical. Ce système est couramment utilisé pour les radars, les cinéthéodolites, les canons anti-aériens. La rotation autour de l’axe horizontal assure la poursuite en hauteur (de haut en bas), en d’autres termes la normale du capteur solaire suit la hauteur angulaire du soleil.
Alors que l’autre axe assure le déplacement en azimut (de gauche vers la droite). Cette disposition très simple ne pose pas de problèmes mécaniques particuliers.
Les mouvements en hauteur et en azimut sont difficiles à coordonner et le coût du système est exorbitant à cause de l'apport de deux moteurs, donc d’une consommation en énergie beaucoup plus importante.
22
Figure III-4 : Monture altazimutale.
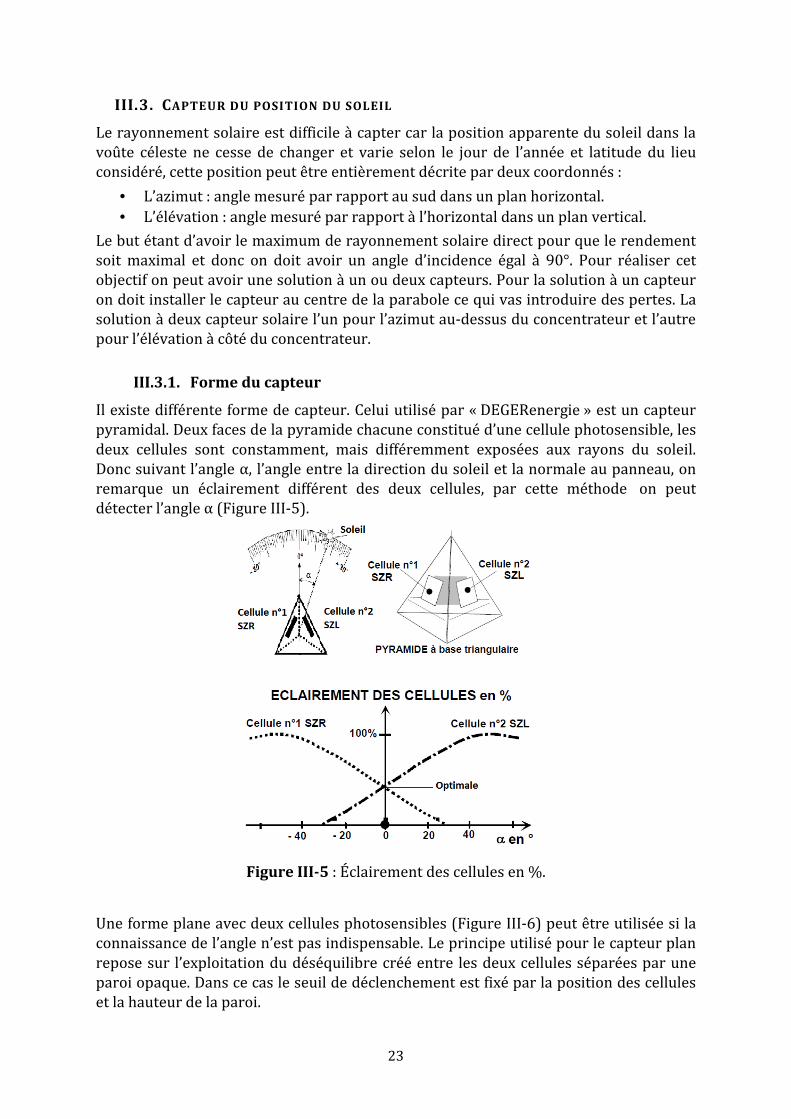
III.2.3.2. Monture équatoriale
La monture équatoriale est la monture idéale pour assurer un suivi sidéral. Elle emploie une rotation autour d’un axe parallèle à l’axe polaire du globe terrestre (mouvement en angle horaire) et un axe orthogonal au précédent (mouvement en déclinaison). Cette solution est plus délicate sur le plan mécanique, mais le mouvement autour de l’axe polaire est pratiquement uniforme au cours de la journée. Donc la poursuite du soleil est grandement facile.
Figure III-4 : Monture équatoriale.
23
III.3. CAPTEUR DU POSITION DU SOLEIL
Le rayonnement solaire est difficile à capter car la position apparente du soleil dans la voûte céleste ne cesse de changer et varie selon le jour de l’année et latitude du lieu considéré, cette position peut être entièrement décrite par deux coordonnés :
• L’azimut : angle mesuré par rapport au sud dans un plan horizontal. • L’élévation : angle mesuré par rapport à l’horizontal dans un plan vertical.
Le but étant d’avoir le maximum de rayonnement solaire direct pour que le rendement soit maximal et donc on doit avoir un angle d’incidence égal à 90°. Pour réaliser cet objectif on peut avoir une solution à un ou deux capteurs. Pour la solution à un capteur on doit installer le capteur au centre de la parabole ce qui vas introduire des pertes. La solution à deux capteur solaire l’un pour l’azimut au-dessus du concentrateur et l’autre pour l’élévation à côté du concentrateur.
III.3.1. Forme du capteur
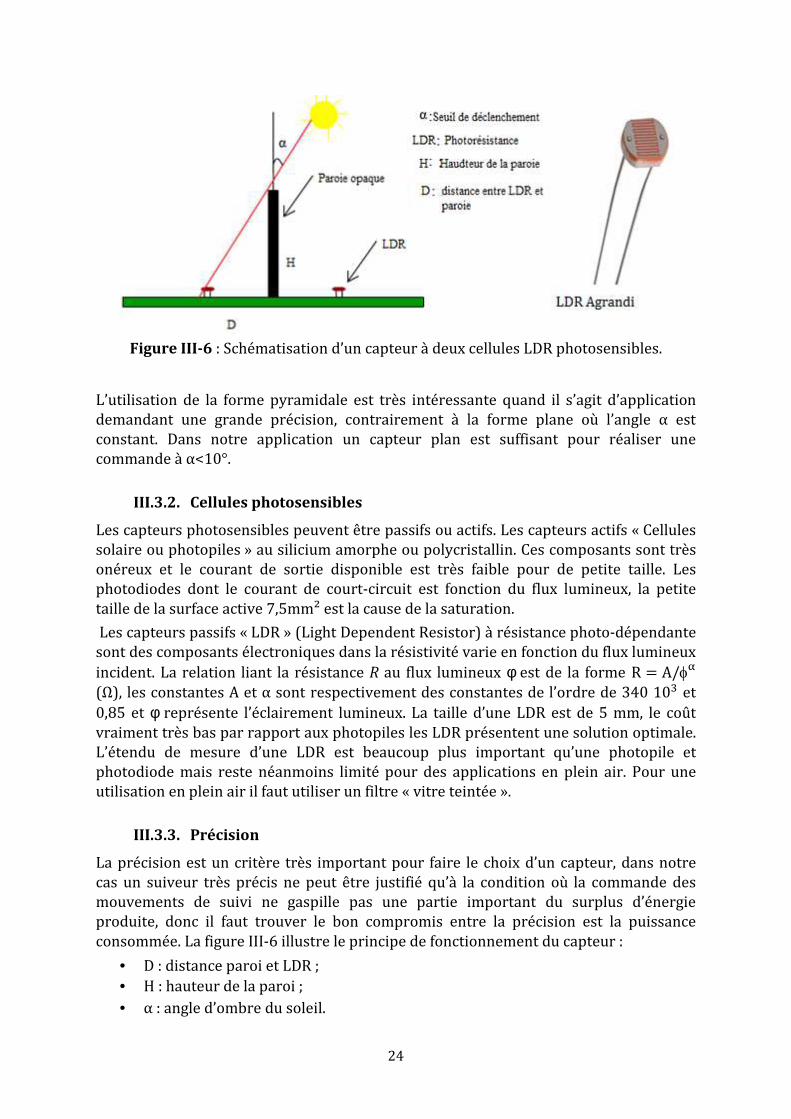
Il existe différente forme de capteur. Celui utilisé par « DEGERenergie » est un capteur pyramidal. Deux faces de la pyramide chacune constitué d’une cellule photosensible, les deux cellules sont constamment, mais différemment exposées aux rayons du soleil. Donc suivant l’angle α, l’angle entre la direction du soleil et la normale au panneau, on remarque un éclairement différent des deux cellules, par cette méthode on peut détecter l’angle α (Figure III-5).
Figure III-5 : Éclairement des cellules en %.
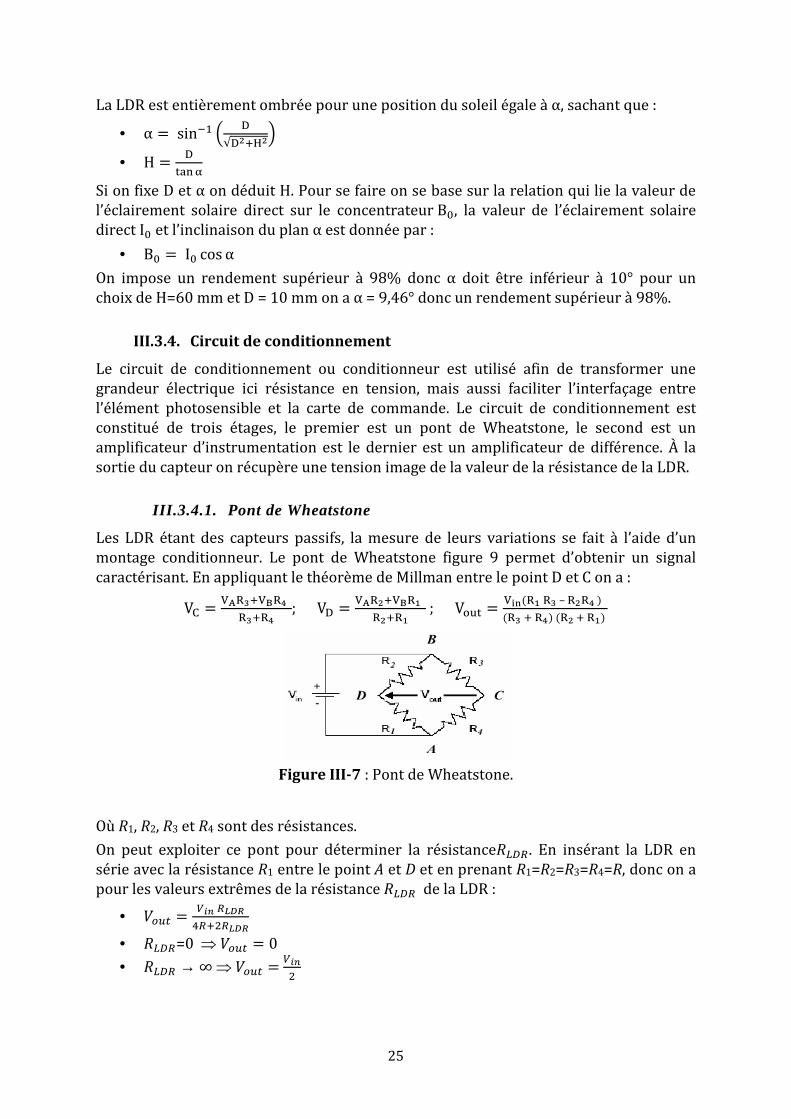
Une forme plane avec deux cellules photosensibles (Figure III-6) peut être utilisée si la connaissance de l’angle n’est pas indispensable. Le principe utilisé pour le capteur plan repose sur l’exploitation du déséquilibre créé entre les deux cellules séparées par une paroi opaque. Dans ce cas le seuil de déclenchement est fixé par la position des cellules et la hauteur de la paroi.
24
Figure III-6 : Schématisation d’un capteur à deux cellules LDR photosensibles.
L’utilisation de la forme pyramidale est très intéressante quand il s’agit d’application demandant une grande précision, contrairement à la forme plane où l’angle α est constant. Dans notre application un capteur plan est suffisant pour réaliser une commande à α<10°.
III.3.2. Cellules photosensibles
Les capteurs photosensibles peuvent être passifs ou actifs. Les capteurs actifs « Cellules solaire ou photopiles » au silicium amorphe ou polycristallin. Ces composants sont très onéreux et le courant de sortie disponible est très faible pour de petite taille. Les photodiodes dont le courant de court-circuit est fonction du flux lumineux, la petite taille de la surface active 7,5mm² est la cause de la saturation.
Les capteurs passifs « LDR » (Light Dependent Resistor) à résistance photo-dépendante sont des composants électroniques dans la résistivité varie en fonction du flux lumineux incident. La relation liant la résistance R au flux lumineux φ est de la forme R = A/φ
(Ω), les constantes A et α sont respectivement des constantes de l’ordre de 340 10 et 0,85 et φ représente l’éclairement lumineux. La taille d’une LDR est de 5 mm, le coût vraiment très bas par rapport aux photopiles les LDR présentent une solution optimale. L’étendu de mesure d’une LDR est beaucoup plus important qu’une photopile et photodiode mais reste néanmoins limité pour des applications en plein air. Pour une utilisation en plein air il faut utiliser un filtre « vitre teintée ».
III.3.3. Précision
La précision est un critère très important pour faire le choix d’un capteur, dans notre cas un suiveur très précis ne peut être justifié qu’à la condition où la commande des mouvements de suivi ne gaspille pas une partie important du surplus d’énergie produite, donc il faut trouver le bon compromis entre la précision est la puissance consommée. La figure III-6 illustre le principe de fonctionnement du capteur :
• D : distance paroi et LDR ; • H : hauteur de la paroi ;
• α : angle d’ombre du soleil.
25
La LDR est entièrement ombrée pour une position du soleil égale àα, sachant que :
• α = sin √
• H =
Si on fixe D et α on déduit H. Pour se faire on se base sur la relation qui lie la valeur de l’éclairement solaire direct sur le concentrateurB, la valeur de l’éclairement solaire direct I et l’inclinaison du plan α est donnée par :
• B = I cos αOn impose un rendement supérieur à 98% donc α doit être inférieur à 10° pour un choix de H=60 mm et D = 10 mm on a α = 9,46° donc un rendement supérieur à 98%.
III.3.4. Circuit de conditionnement
Le circuit de conditionnement ou conditionneur est utilisé afin de transformer une grandeur électrique ici résistance en tension, mais aussi faciliter l’interfaçage entre l’élément photosensible et la carte de commande. Le circuit de conditionnement est constitué de trois étages, le premier est un pont de Wheatstone, le second est un amplificateur d’instrumentation est le dernier est un amplificateur de différence. À la sortie du capteur on récupère une tension image de la valeur de la résistance de la LDR.
III.3.4.1. Pont de Wheatstone
Les LDR étant des capteurs passifs, la mesure de leurs variations se fait à l’aide d’un montage conditionneur. Le pont de Wheatstone figure 9 permet d’obtenir un signal caractérisant. En appliquant le théorème de Millman entre le point D et C on a :
V! = "#$%"&$'$%$'
; V = "#$"&$($$(
; V)* = "+,($($%–$$')($%$')($$()
Figure III-7 : Pont de Wheatstone.
Où R1, R2, R3 et R4 sont des résistances.
On peut exploiter ce pont pour déterminer la résistance0123. En insérant la LDR en série avec la résistance R1 entre le point A et D et en prenant R1=R2=R3=R4=R, donc on a pour les valeurs extrêmes de la résistance 0123 de la LDR :
• 4567 = 89:3;<=>3?3;<=
• 0123=0 ⇒ 4567 = 0
• 0123 → ∞ ⇒ 4567 = 89:?
26
Il apparait que la tension de sortie V)* porte une information sur la valeur de la résistance de la LDR.
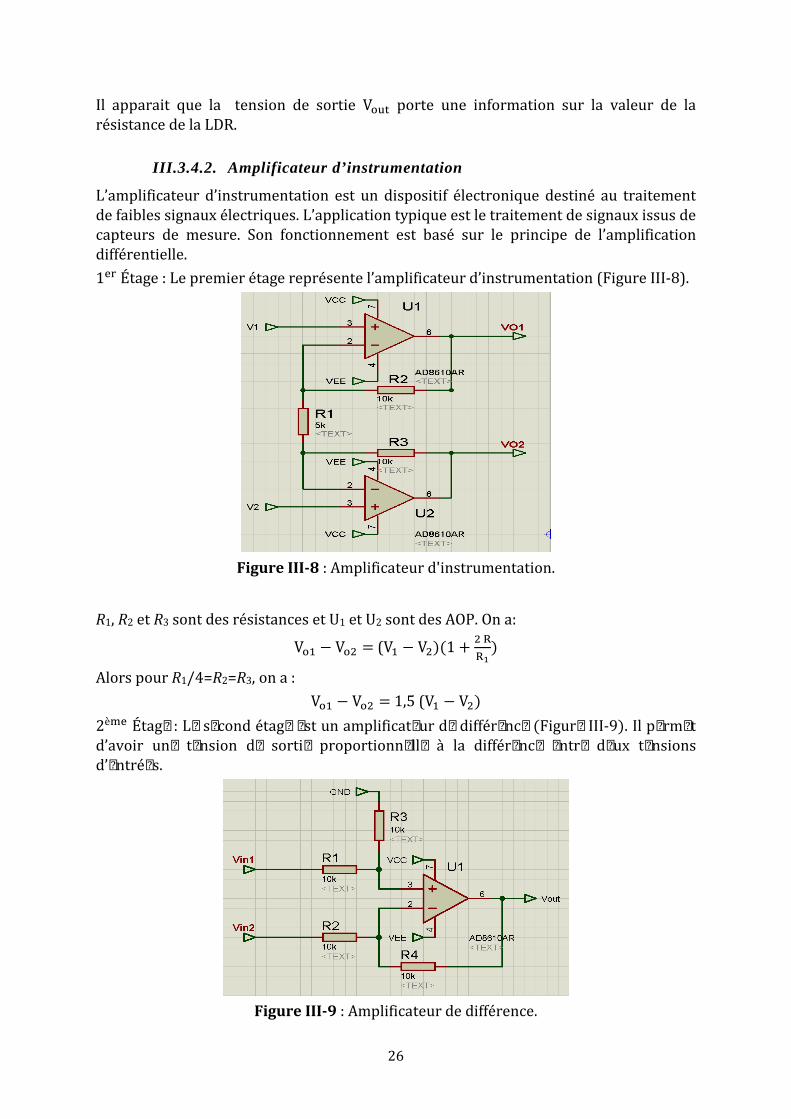
III.3.4.2. Amplificateur d’instrumentation
L’amplificateur d’instrumentation est un dispositif électronique destiné au traitement de faibles signaux électriques. L’application typique est le traitement de signaux issus de capteurs de mesure. Son fonctionnement est basé sur le principe de l’amplification différentielle.
1@AÉtage : Le premier étage représente l’amplificateur d’instrumentation (Figure III-8).
Figure III-8 : Amplificateur d'instrumentation.
R1, R2 et R3 sont des résistances et U1 et U2 sont des AOP. On a:
V) − V)? = (V − V?)(1 + ?$$()
Alors pour R1/4=R2=R3, on a :
V) − V)? = 1,5 (V − V?) 2èF@Étage:Lesecondétageestunamplificateurdedifférence(FigureIII-9).Ilpermetd’avoir une tension de sortie proportionnelle à la différence entre deux tensionsd’entrées.
Figure III-9 : Amplificateur de différence.
27
R1, R2, R3 et R4 sont des résistances et U1 est un AOP. Alors pour R1=R2=R3=R4, on a :
V567 = (V _ − V _?)
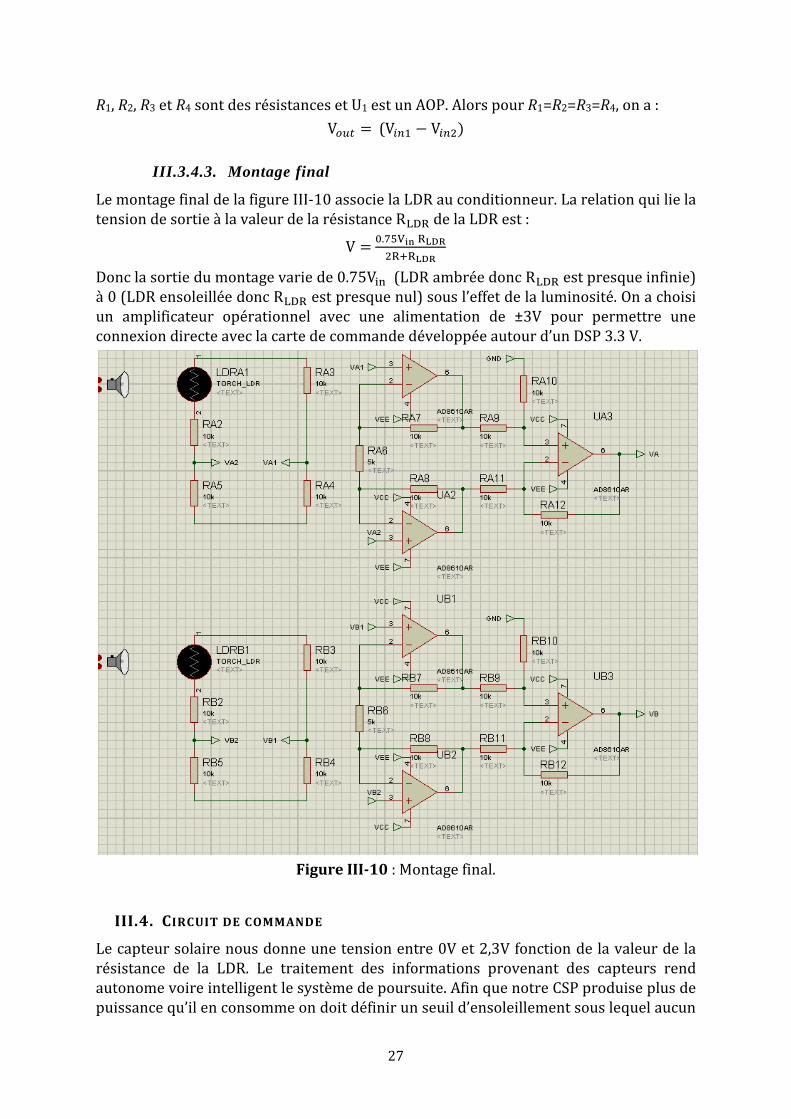
III.3.4.3. Montage final
Le montage final de la figure III-10 associe la LDR au conditionneur. La relation qui lie la tension de sortie à la valeur de la résistance R`$ de la LDR est :
V = .ab"+,$cde?$$cde
Donc la sortie du montage varie de 0.75Vf (LDR ambrée donc R`$ est presque infinie) à 0 (LDR ensoleillée donc R`$ est presque nul) sous l’effet de la luminosité. On a choisi un amplificateur opérationnel avec une alimentation de ±3V pour permettre une connexion directe avec la carte de commande développée autour d’un DSP 3.3 V.
Figure III-10 : Montage final.
III.4. CIRCUIT DE COMMANDE
Le capteur solaire nous donne une tension entre 0V et 2,3V fonction de la valeur de la résistance de la LDR. Le traitement des informations provenant des capteurs rend autonome voire intelligent le système de poursuite. Afin que notre CSP produise plus de puissance qu’il en consomme on doit définir un seuil d’ensoleillement sous lequel aucun
28
organe du concentrateur n’est alimenté, ce seuil permettra aussi de faire la différence entre deux modes de fonctionnement. La prise en charge des différents modes de fonctionnement ainsi que la poursuite solaire est décrite par un algorithme qui est implémenté dans un processeur qui représente le cœur de la carte de commande. La carte de commande doit pouvoir lire les informations à partir du capteur solaire et générer des signaux de commande.
III.4.1. Algorithme
La distinction entre deux modes de fonctionnement le premier pour la nuit et le second pour le jour. Au cours de la nuit la pompe qui fait circuler le fluide caloporteur est mise hors de tension car c’est une perte d’énergie. Contrairement au mode de nuit pour le mode du jour la pompe qui fait circuler le fluide caloporteur est allumée mais encore le traitement des tensions en provenance du capteur solaire. Un seuil d’ensoleillement doit être franchi pour passer d’un mode à un autre. Le mode nuit est le mode où la production du CSP est inférieur à celle dont on a besoin pour faire tourner la pompe et pour le système de poursuite, dans ce mode les actionneurs sont mis hors tension, donc la consommation est réduite. Une fois on détecte via les LDR un ensoleillement supérieur au seuil déterminé on passe du mode nuit au mode jour. La puissance produite durant le mode jour est supérieur à celle consommé par le CSP pour assurer le fonctionnement de la pompe et le système de poursuite solaire.
III.4.2. Processeur
Le processeur est l’élément intélligent de notre carte de commande, le choix du procésseur est donc primordiale. Le processeur doit pouvoir lire à partir du capteur solaire et générer des signaux de commande, la fréquence d’exécution de l’algorithme ne présente pas une contrainte car le mouvement du soleil est relativement lent (Le soleil se déplace de 1° toutes les 4 minutes) par rapport au temps d’éxécution de l’algorithme.
Un paramètre important qui intervient dans le choix du processeur est la possibilité de programmer le DSP après la réalisation de la carte via une interface JTAG simple contrairement au PIC très difficile à programmer sur un PCB. Ce paramètre nous permet d’abord d’assurer non seulement que notre processeur sera programmé après la fabrication du PCB mais on peut le reprogrammer en cas d’erreur ou d’évolution du software, le pic quant à lui est beaucoup plus lourd à programmer et un bootloader est indispensable dans notre cas.
Une étude comparative entre le PIC 16F737 et le DSP TMS320F28023 justifie l’utilisation du DSP.
Le TMS320F28023 est un processeur de la famille Piccolo de chez Texas Instrument. Cette famille de DSP 32 bits destinée pour la commande des moteurs. L’architecture du TMS320F28023 a été modifié afin de faciliter l’implémentation et rendre rapide l’exécution des algorithmes.
Le DSP contient plusieurs ressources, pour l’instant on ne va pas utiliser toutes les ressources. Chaque périphérique du DSP contient un bypass qui permet d’isoler le circuit donc le périphérique ne consomme plus de puissance, ceci est réaliser en
29
coupant le signal d’horloge au bloque. Les registres PCLKR permettent d’activer ou non le signal d’horloge.
III.4.3. Périphériques
L’implémentation du système de poursuite ne mobilise pas tous les périphériques du DSP, dans un souci d’optimisation de la puissance consommée par le processeur on ne va utiliser que trois périphériques. ADC pour garantir la lecture du capteur solaire, la PWM pour commander les moteurs et le JTAG pour programmer le DSP.
III.4.3.1. ADC
L’ADC ou convertisseur analogique numérique est basé sur un convertisseur 12 bits. Il peut faire jusqu’à 16 conversions. Le séquenceur de l’ADC permet de créer une série de conversions basé sur SOC « Start of conversions » qui sert de déclencheur pour la conversion. La fonction ADC est constitué de :
• Un convertisseur 12 bits basé sur deux échenilleurs bloqueurs ; • Un échantillonnage simultané ou séquentiel ; • Une tension d’entrée entre 0V et 3,3 V ; • 16 SOC déclencheurs configurable indépendamment ‘logiciel, PWM, GPIO, etc. ; • 16 registres résultat ; • 9 interruptions.
La lecture des mesures va se faire à partir du capteur solaire. La carte de commande et le capteur doivent être compatibles afin de réaliser l’interface entre le capteur et l’entrée du DSP L’AOP utilisé dans la carte capteur est alimentée avec une tension de 3 V donc la tension maximale en sortie qu’on peut atteindre est 3 V et par conséquent la connexion entre la carte du capteur et le DSP (0V à 3,3 V) ne pose aucun problème de compatibilité. La valeur numérique de la conversion est calculée par :
Valeurnumérique = 4096Entréeanalogique
3,3
La figure III-11 présente le diagramme fonctionnel de l’ADC, la partie A présente les entrées analogique de notre DSP pour notre application on a besoin de deux entrées analogique (ADCINA1 et ADCINB1 seront mobilisés) le choix d’une entrée de l’ensemble ADCINA et une autre de l’ensemble ADCINB. La figure III-11 B assure la conversion simultanée, car on peut bloquer au même moment deux valeurs l’une en provenance d’ADCINA et l’autre d’ADCINB (Figure III-11 E).
On souhaite pouvoir réaliser la conversion toutes les quatre minutes le moyen le plus facile est de synchroniser le début de la conversion avec un Timer (Figure III-11 D).
Le Timer est un registre sur 32 bits la fréquence d’horloge à son entrée « >mn
oAépfqfr@*A » est
contrôlée par un pré diviseur sur 3 bits, donc le Timer va compter jusqu’à ?%oAépfqr@*A
>
(s) pour un prédiviseur égale à 2 le Timer vas déclencher une interruption de débordement du compter toutes les 214 s cette interruption sera par la suite utilisé comme SOC (Figure III-11 C).
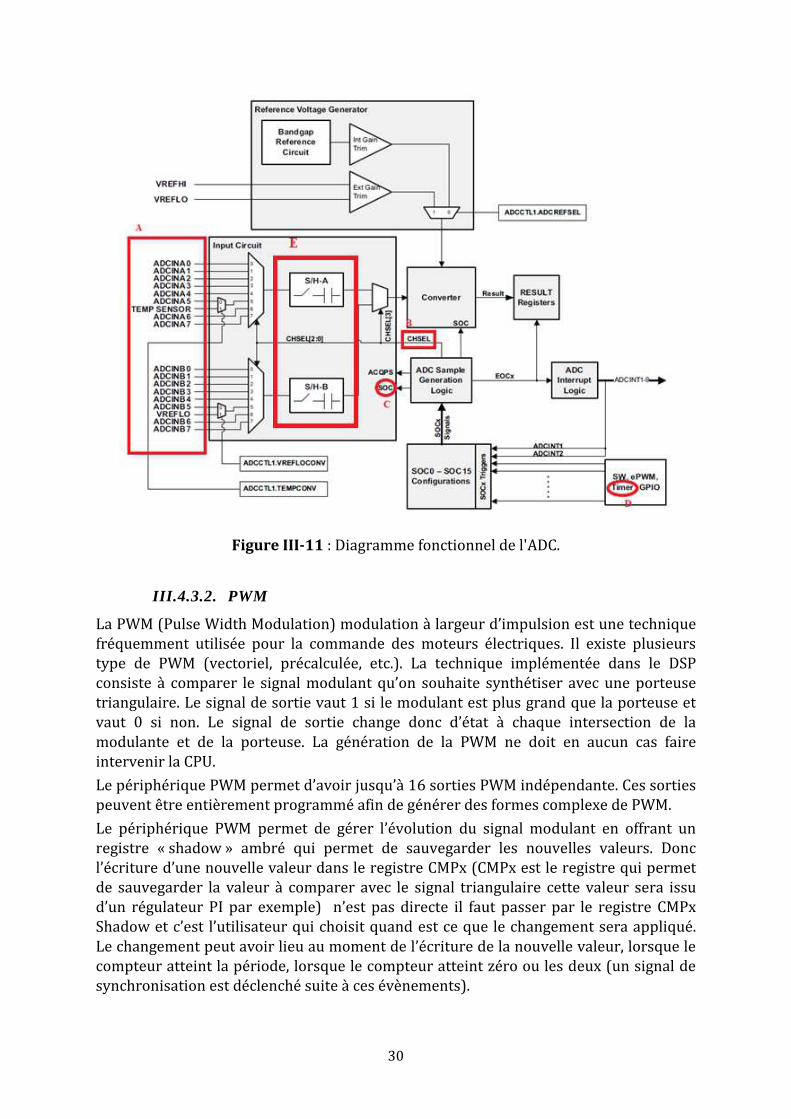
30
Figure III-11 : Diagramme fonctionnel de l'ADC.
III.4.3.2. PWM
La PWM (Pulse Width Modulation) modulation à largeur d’impulsion est une technique fréquemment utilisée pour la commande des moteurs électriques. Il existe plusieurs type de PWM (vectoriel, précalculée, etc.). La technique implémentée dans le DSP consiste à comparer le signal modulant qu’on souhaite synthétiser avec une porteuse triangulaire. Le signal de sortie vaut 1 si le modulant est plus grand que la porteuse et vaut 0 si non. Le signal de sortie change donc d’état à chaque intersection de la modulante et de la porteuse. La génération de la PWM ne doit en aucun cas faire intervenir la CPU.
Le périphérique PWM permet d’avoir jusqu’à 16 sorties PWM indépendante. Ces sorties peuvent être entièrement programmé afin de générer des formes complexe de PWM.
Le périphérique PWM permet de gérer l’évolution du signal modulant en offrant un registre « shadow » ambré qui permet de sauvegarder les nouvelles valeurs. Donc l’écriture d’une nouvelle valeur dans le registre CMPx (CMPx est le registre qui permet de sauvegarder la valeur à comparer avec le signal triangulaire cette valeur sera issu d’un régulateur PI par exemple) n’est pas directe il faut passer par le registre CMPx Shadow et c’est l’utilisateur qui choisit quand est ce que le changement sera appliqué. Le changement peut avoir lieu au moment de l’écriture de la nouvelle valeur, lorsque le compteur atteint la période, lorsque le compteur atteint zéro ou les deux (un signal de synchronisation est déclenché suite à ces évènements).
31
L’exploitation de la PWM afin d’attaquer la carte de puissance ne peut pas se faire directement car brancher la carte de commande (basse tension 3,3 V) avec la carte de puissance « 24 V » risque de griller la carte de puissance, donc l’utilisation d’un isolateur est indispensable. L’isolateur utilisé dans ce cas est l’ISO721.
ISO721 est un isolateur de Texas Instrument il permet d’isoler la partie commande de la partie puissance par une barrière à base de dioxyde de silicium SiO2. Cette barrière permet une isolation galvanique jusqu’à 4000V.
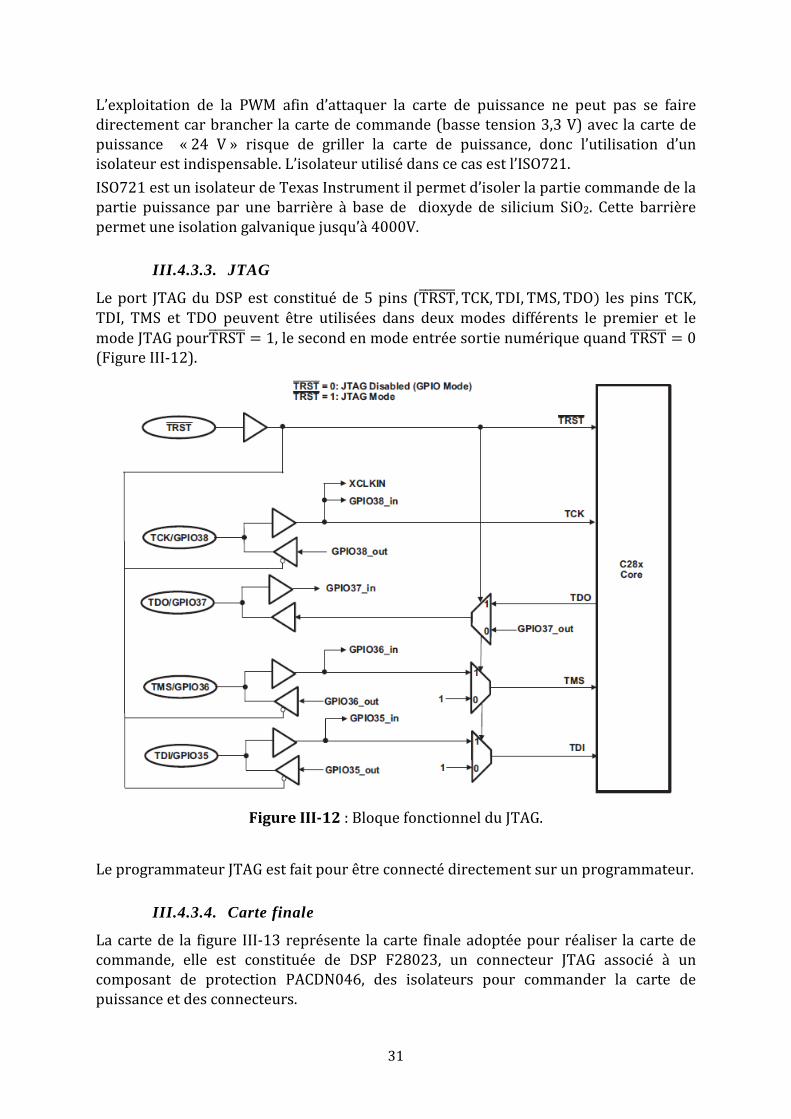
III.4.3.3. JTAG
Le port JTAG du DSP est constitué de 5 pins (TRSTuuuuuuu, TCK, TDI, TMS, TDO) les pins TCK, TDI, TMS et TDO peuvent être utilisées dans deux modes différents le premier et le mode JTAG pourTRSTuuuuuuu = 1, le second en mode entrée sortie numérique quand TRSTuuuuuuu = 0 (Figure III-12).
Figure III-12 : Bloque fonctionnel du JTAG.
Le programmateur JTAG est fait pour être connecté directement sur un programmateur.
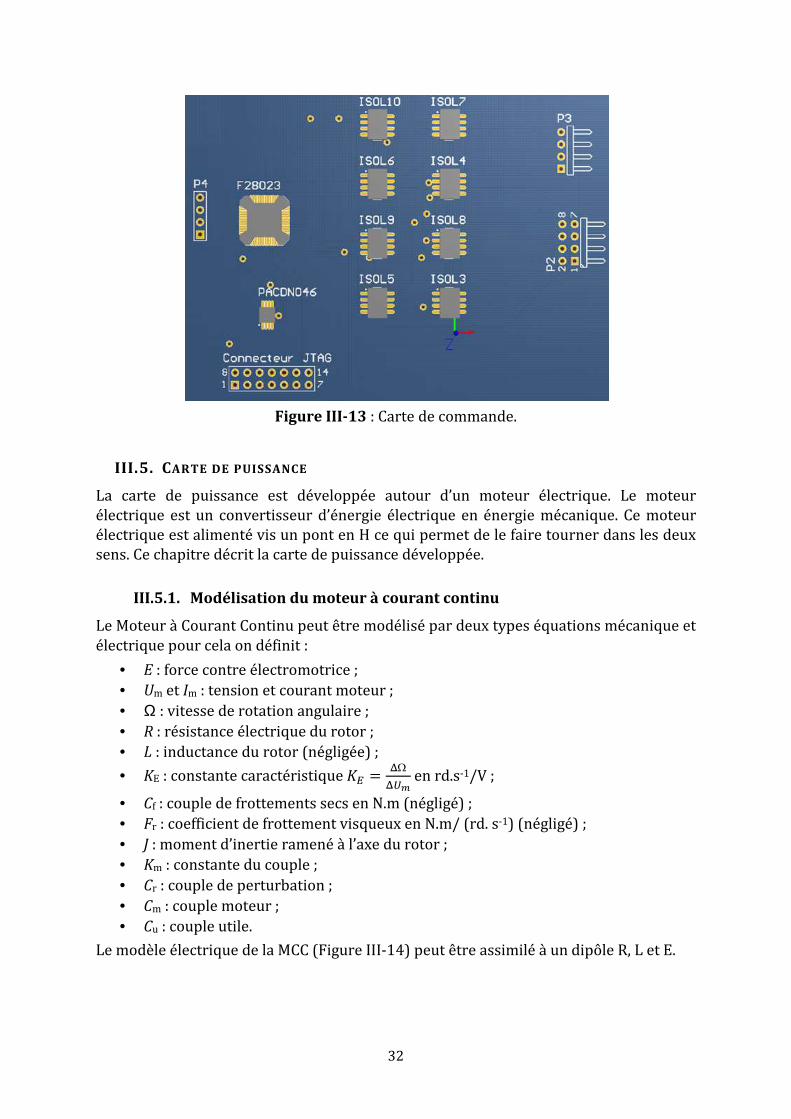
III.4.3.4. Carte finale
La carte de la figure III-13 représente la carte finale adoptée pour réaliser la carte de commande, elle est constituée de DSP F28023, un connecteur JTAG associé à un composant de protection PACDN046, des isolateurs pour commander la carte de puissance et des connecteurs.
32
Figure III-13 : Carte de commande.
III.5. CARTE DE PUISSANCE
La carte de puissance est développée autour d’un moteur électrique. Le moteur électrique est un convertisseur d’énergie électrique en énergie mécanique. Ce moteur électrique est alimenté vis un pont en H ce qui permet de le faire tourner dans les deux sens. Ce chapitre décrit la carte de puissance développée.
III.5.1. Modélisation du moteur à courant continu
Le Moteur à Courant Continu peut être modélisé par deux types équations mécanique et électrique pour cela on définit :
• E : force contre électromotrice ; • Um et Im : tension et courant moteur ; • Ω : vitesse de rotation angulaire ; • R : résistance électrique du rotor ; • L : inductance du rotor (négligée) ;
• KE : constante caractéristique | = Ω~
en rd.s-1/V ;
• Cf : couple de frottements secs en N.m (négligé) ; • Fr : coefficient de frottement visqueux en N.m/ (rd. s-1) (négligé) ; • J : moment d’inertie ramené à l’axe du rotor ; • Km : constante du couple ; • Cr : couple de perturbation ; • Cm : couple moteur ; • Cu : couple utile.
Le modèle électrique de la MCC (Figure III-14) peut être assimilé à un dipôle R, L et E.
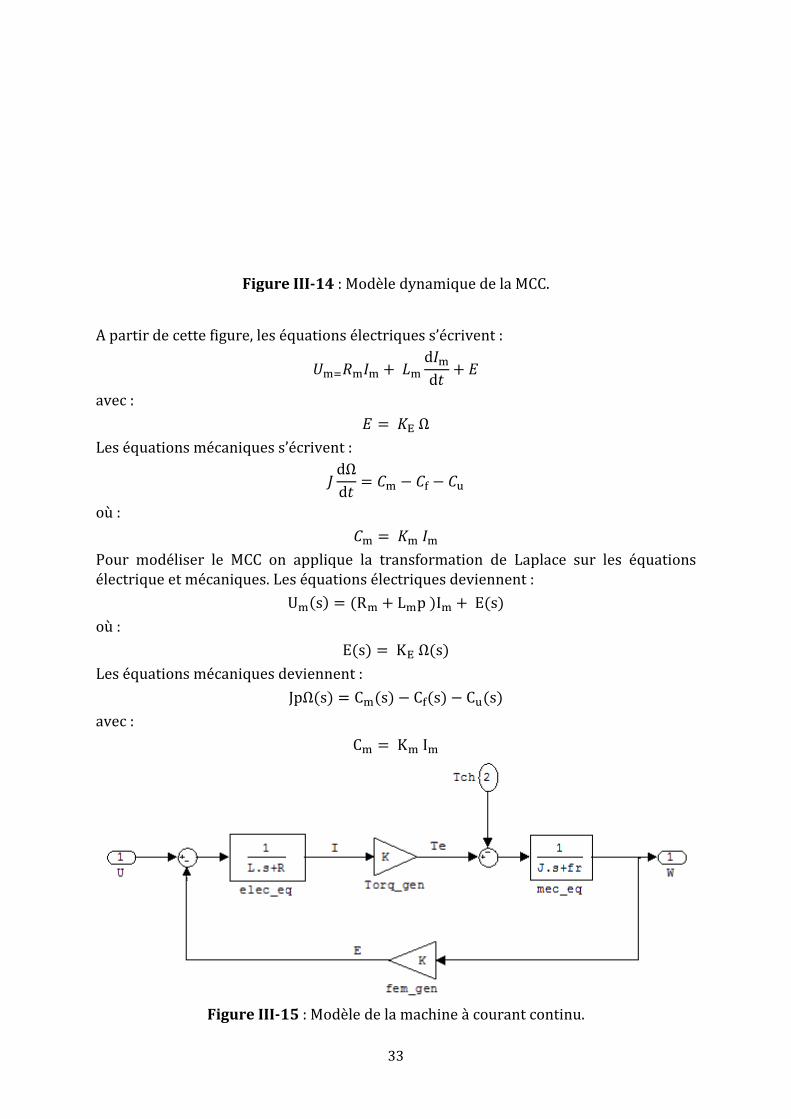
Figure III
A partir de cette figure, les équations électriques s’écrivent
avec :
Les équations mécaniques s’écrivent :
où :
Pour modéliser le MCC on applique la transformation de Laplace sur les équations électrique et mécaniques. Les équations électriques
où :
Les équations mécaniques deviennent
avec :
Figure III-15
33
Figure III-14 : Modèle dynamique de la MCC.
A partir de cette figure, les équations électriques s’écrivent :
F0FF +FdF
dC
= Ω
Les équations mécaniques s’écrivent :
dΩ
d= F B B *
F = FF
Pour modéliser le MCC on applique la transformation de Laplace sur les équations électrique et mécaniques. Les équations électriques deviennent :
UF(s/ = -RF C LFp/IF C E-s/
E-s/ KΩ-s/
deviennent :
JpΩ-s/ CF-s/ B C-s/ B C*-s/
CF KFIF
15 : Modèle de la machine à courant continu.
Pour modéliser le MCC on applique la transformation de Laplace sur les équations
: Modèle de la machine à courant continu.
34
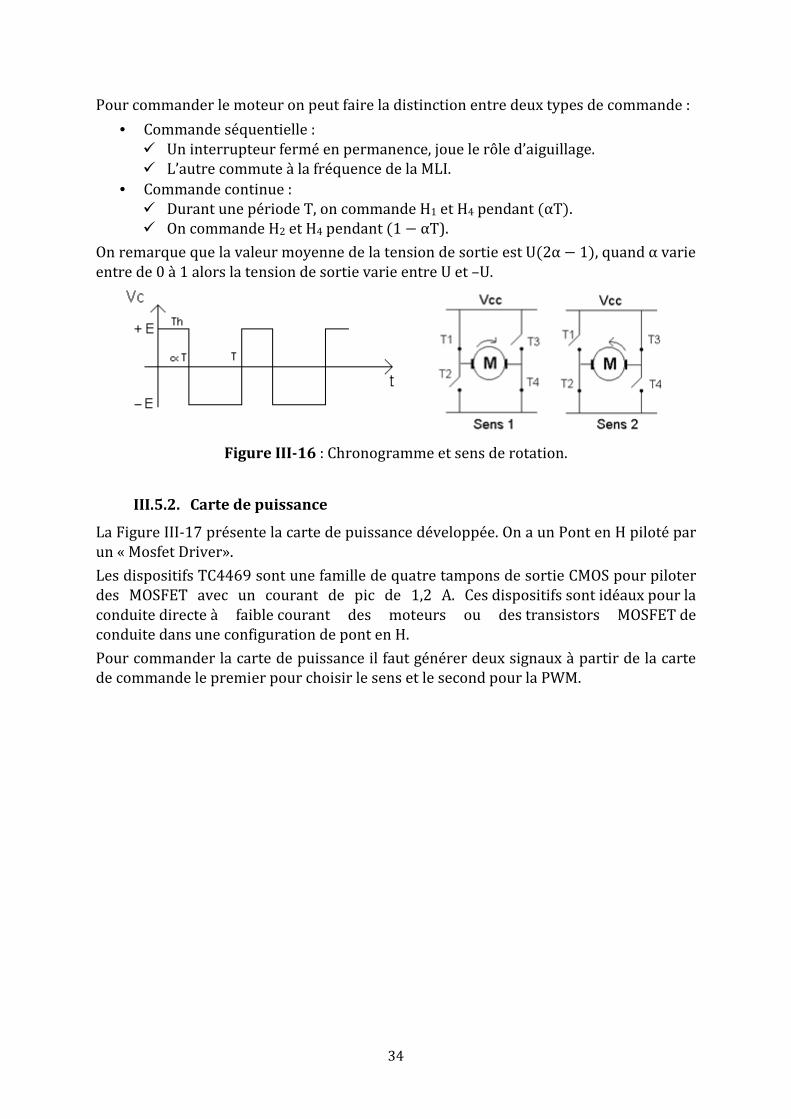
Pour commander le moteur on peut faire la distinction entre deux types de commande :
• Commande séquentielle : Un interrupteur fermé en permanence, joue le rôle d’aiguillage. L’autre commute à la fréquence de la MLI.
• Commande continue : Durant une période T, on commande H1 et H4 pendant(αT). On commande H2 et H4 pendant(1 − αT).
On remarque que la valeur moyenne de la tension de sortie estU-2α B 1/, quand α varie entre de 0 à 1 alors la tension de sortie varie entre U et –U.
Figure III-16 : Chronogramme et sens de rotation.
III.5.2. Carte de puissance
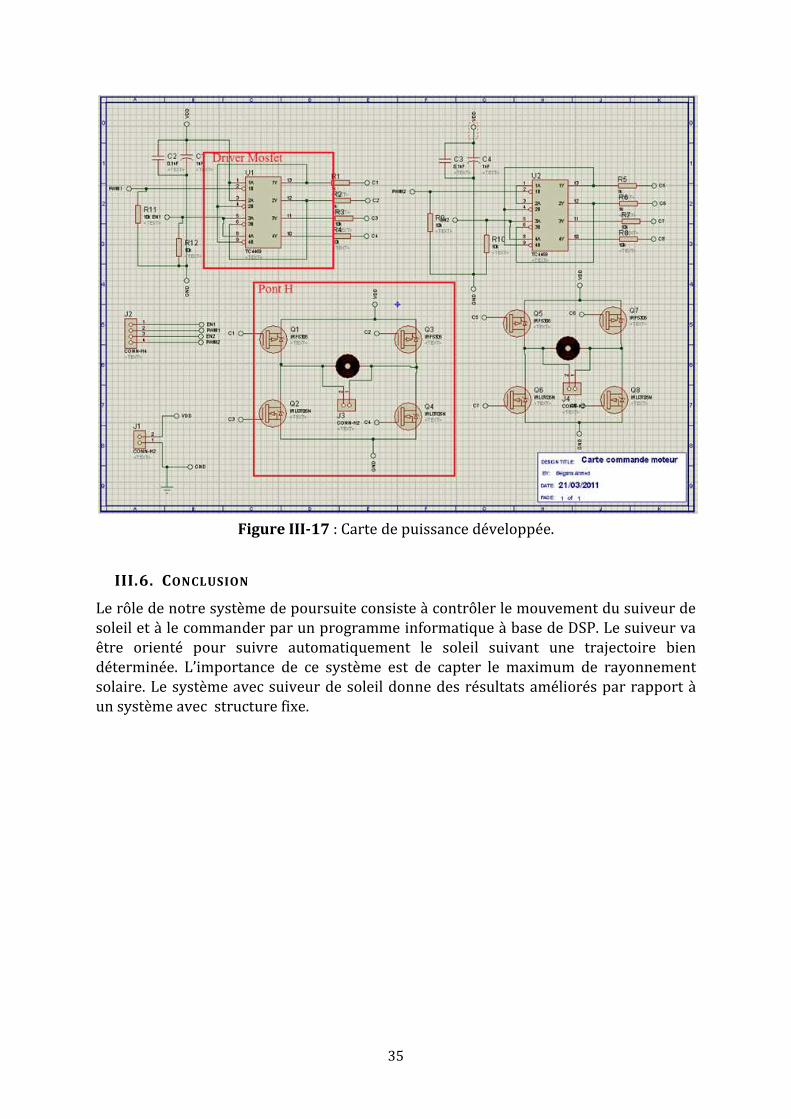
La Figure III-17 présente la carte de puissance développée. On a un Pont en H piloté par un « Mosfet Driver».
Les dispositifs TC4469 sont une famille de quatre tampons de sortie CMOS pour piloter des MOSFET avec un courant de pic de 1,2 A. Ces dispositifs sont idéaux pour la conduite directe à faible courant des moteurs ou des transistors MOSFET de conduite dans une configuration de pont en H.
Pour commander la carte de puissance il faut générer deux signaux à partir de la carte de commande le premier pour choisir le sens et le second pour la PWM.
35
Figure III-17 : Carte de puissance développée.
III.6. CONCLUSION
Le rôle de notre système de poursuite consiste à contrôler le mouvement du suiveur de soleil et à le commander par un programme informatique à base de DSP. Le suiveur va être orienté pour suivre automatiquement le soleil suivant une trajectoire bien déterminée. L’importance de ce système est de capter le maximum de rayonnement solaire. Le système avec suiveur de soleil donne des résultats améliorés par rapport à un système avec structure fixe.

36
CC OO NN CC LL UU SS II OO NN
Ce mémoire est le fruit des recherches basées sur le thème d’un stage réalisé au sein de l’Université international de rabat et dont l’objectif principal était de réaliser un système de poursuite de la position du soleil en temps réel. La première étape du projet consistait à faire une étude bibliographique sur le système de poursuite solaire. La deuxième étape était de réaliser un capteur solaire pour pouvoir détecter la position optimale et faire la différence entre la nuit et le jour. La troisième étape était de réaliser la carte de commande pour traiter les informations issues du capteur et contrôler la carte de puissance. La quatrième étape était de réaliser une carte de puissance pour conduire le moteur.
Ce projet de fin d’études était pour nous l’occasion précieuse pour découvrir le monde des énergies renouvelables, qui fait partis de notre spécialité.
Nos perspectives pour le projet seront de fabriquer un troisième prototype du concentrateur afin de tester la robustesse des cartes électroniques. Nous envisageons par la suite étudier un système de poursuite solaire à deux axes (azimute et élévation).
37
BB II BB LL II OO GG RR AA PP HH II EE
1- Mémoire de projet de stage réalisé par AHMED BELGANA à l’université International de Rabat.
2- Étude et Réalisation d’un Concentrateur Solaire parabolique, Mémoire réalisé par ZEGHIB ILHEM, UNIVERSITE MENTOURI – CONSTANTINE
3- Site Web de « Moroccan Agency for Solar Energy : MASEN» : Étude d’impacte du complexe solaire d’Ouarzazate.
4- Site Web de l’encyclopédie Wikipédia : http://fr.wikipedia.org.
5- « Oil will be gone in 50 years », Site Web: CNBC.com.
6- Site Web: www.aaenergy.fr.
7- Automatic Sun Tracking System, M.F. Khan et R.L. ALI.
8- Secteur de l’Énergie et des Mines Principales Réalisation (1999-2008) Défis et perspectives, Ministère de l’énergie, des mines, de l’eau et de l’environnement.





























