Embed Size (px)
Citation preview
7/24/2019 Systèmes de Coordonnées_cours
http://slidepdf.com/reader/full/systemes-de-coordonneescours 1/7
Principaux systèmes de coordonnées
A.FIZAZI Univ-BECHAR LMD1/SM_ST
36
Afin de déterminer la position instantanée d’un point matériel, nous devons choisir
d’abord un repère parmi les différents repères les plus utiles. Dans ce qui suit nous allons
rappeler les principaux systèmes de coordonnées.
1/ REPERES D’INERTIE OU GALILEENS ) ( :
(Galilée 1564-1642)
Pour déterminer la position d’un mobile dans l’espace, nous devons choisir avant tout
un corps solide, que nous appelons référentiel, auquel nous associons des axes de
coordonnées.
Définition : tout ensemble de systèmes d’axes de coordonnées, lié à un corps solide S qui est le référentiel )( , constitue un repère )( lié à ce corps solide S .
Exemple : la table (référentiel) + 3 axes = repère lié à la table.
La terre (référentiel) + 3 axes quelque soit leur origine commune = repère lié
à la terre.
Les repères galiléens sont constitués d’un système libre (c'est-à-dire au repos ou en
mouvement rectiligne uniforme).
Dans un référentiel galiléen R donné, on repère une position ponctuelle M à l’aide de
trois coordonnées spatiales et une coordonnée temporelle, donc la position est définie par
quatre nombres réels comme par exemple ( ), , , X Y Z t .
Si on note la position d’un point par ),,,( t z y xOM r =
au temps t , son mouvementdans le repère est défini par l’application )(t r t
.
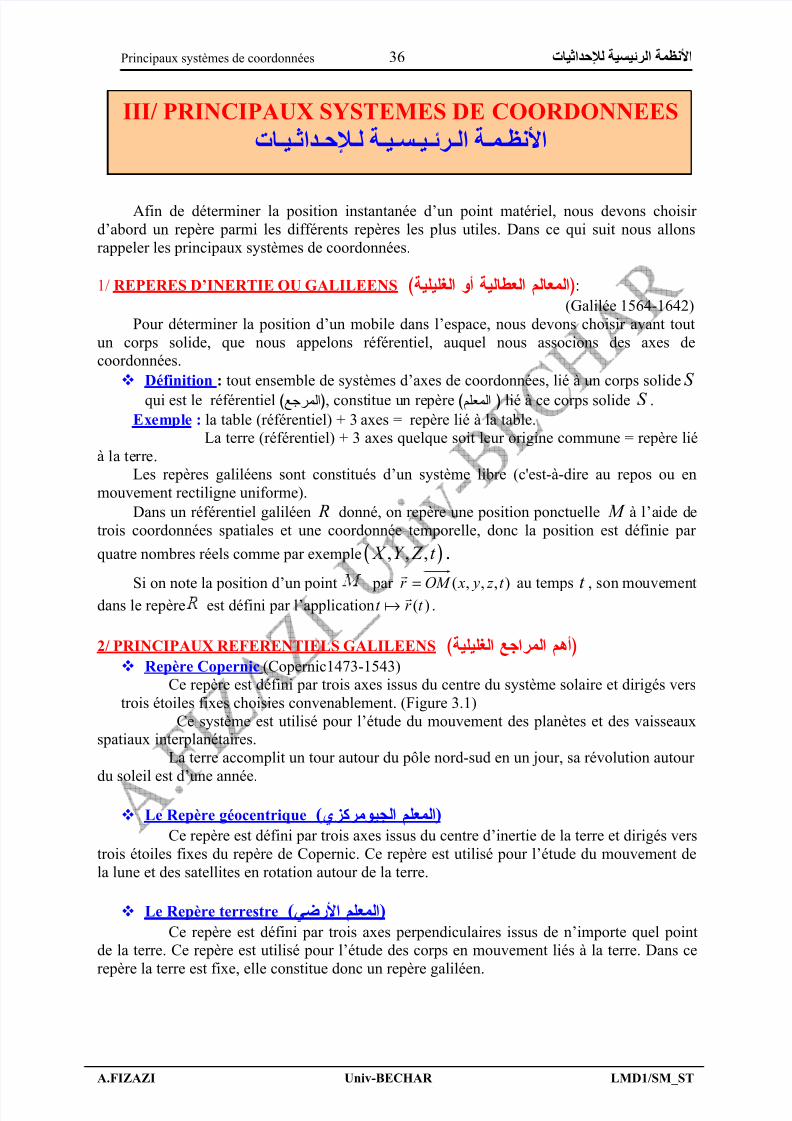
2/ PRINCIPAUX REFERENTIELS GALILEENS ) ( Repère Copernic (Copernic1473-1543)
Ce repère est défini par trois axes issus du centre du système solaire et dirigés vers
trois étoiles fixes choisies convenablement. (Figure 3.1)
Ce système est utilisé pour l’étude du mouvement des planètes et des vaisseauxspatiaux interplanétaires.
La terre accomplit un tour autour du pôle nord-sud en un jour, sa révolution autour
du soleil est d’une année.
Le Repère géocentrique ( )Ce repère est défini par trois axes issus du centre d’inertie de la terre et dirigés vers
trois étoiles fixes du repère de Copernic. Ce repère est utilisé pour l’étude du mouvement de
la lune et des satellites en rotation autour de la terre.
Le Repère terrestre ( )Ce repère est défini par trois axes perpendiculaires issus de n’importe quel point
de la terre. Ce repère est utilisé pour l’étude des corps en mouvement liés à la terre. Dans ce
repère la terre est fixe, elle constitue donc un repère galiléen.
III/ PRINCIPAUX SYSTEMES DE COORDONNEES
EEEE EEEEE EE
7/24/2019 Systèmes de Coordonnées_cours
http://slidepdf.com/reader/full/systemes-de-coordonneescours 2/7
Principaux systèmes de coordonnées
A.FIZAZI Univ-BECHAR LMD1/SM_ST
37
M’ .M
Fig 3.1: les différents repères
Repère géocentrique
Repère de Copernic
La terre
Le soleil
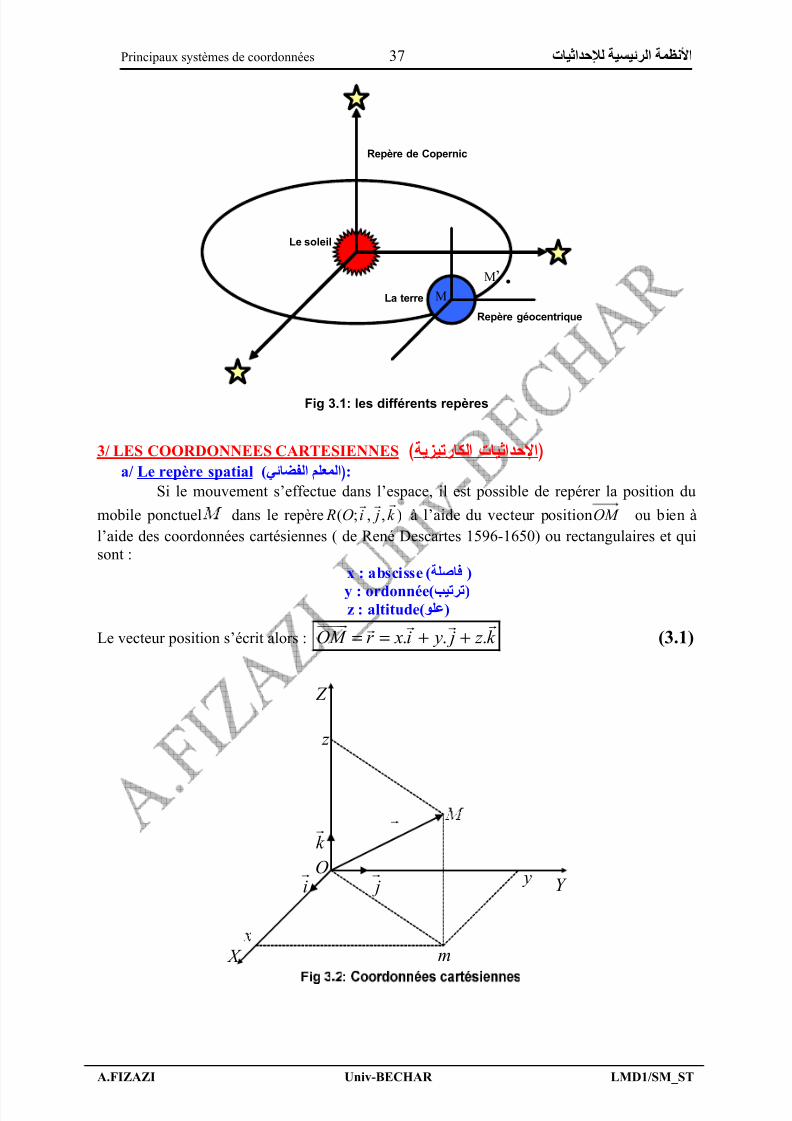
3/ LES COORDONNEES CARTESIENNES ( )a/ Le repère spatial (HIJ KLM):
Si le mouvement s’effectue dans l’espace, il est possible de repérer la position du
mobile ponctuel dans le repère ),,;( k jiO R
à l’aide du vecteur positionOM ou bien à
l’aide des coordonnées cartésiennes ( de René Descartes 1596-1650) ou rectangulaires et qui
sont :
x : abscisse )LOP(
y : ordonnée )STT(z : altitude )VLW(
Le vecteur position s’écrit alors : . . .OM r x i y j z k = = + +
(3.1)
O
Z
Y
X
i
k
j
m
y
z
7/24/2019 Systèmes de Coordonnées_cours
http://slidepdf.com/reader/full/systemes-de-coordonneescours 3/7
Principaux systèmes de coordonnées
A.FIZAZI Univ-BECHAR LMD1/SM_ST
38
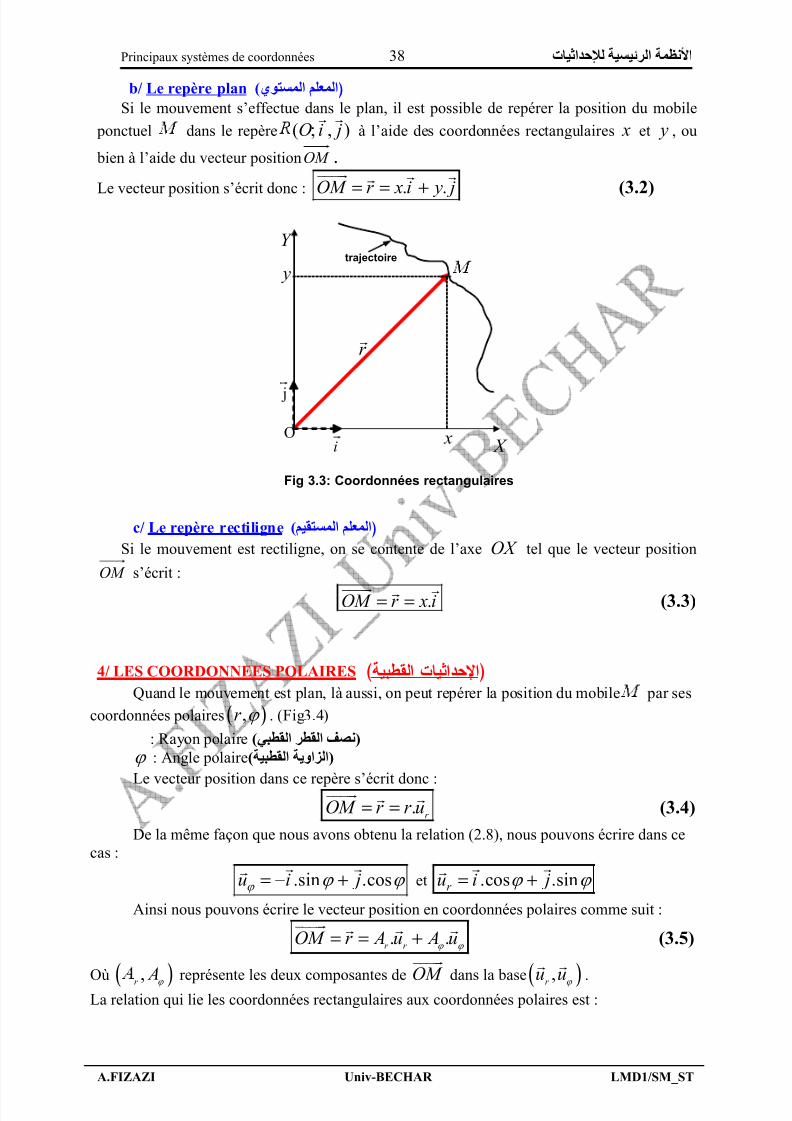
b/ Le repère plan (XVY KLM)Si le mouvement s’effectue dans le plan, il est possible de repérer la position du mobile
ponctuel dans le repère ( ; , )O i j
à l’aide des coordonnées rectangulaires x et y , ou
bien à l’aide du vecteur position OM .
Le vecteur position s’écrit donc : . .OM r x i y j= = +
(3.2)
Oi
j
Fig 3.3: Coordonnées rectangulaires
r
trajectoire
x
y
Y
X
c/ Le repère rectiligne (KZY KLM)Si le mouvement est rectiligne, on se contente de l’axe OX tel que le vecteur position
OM s’écrit :
.OM r x i= = (3.3)
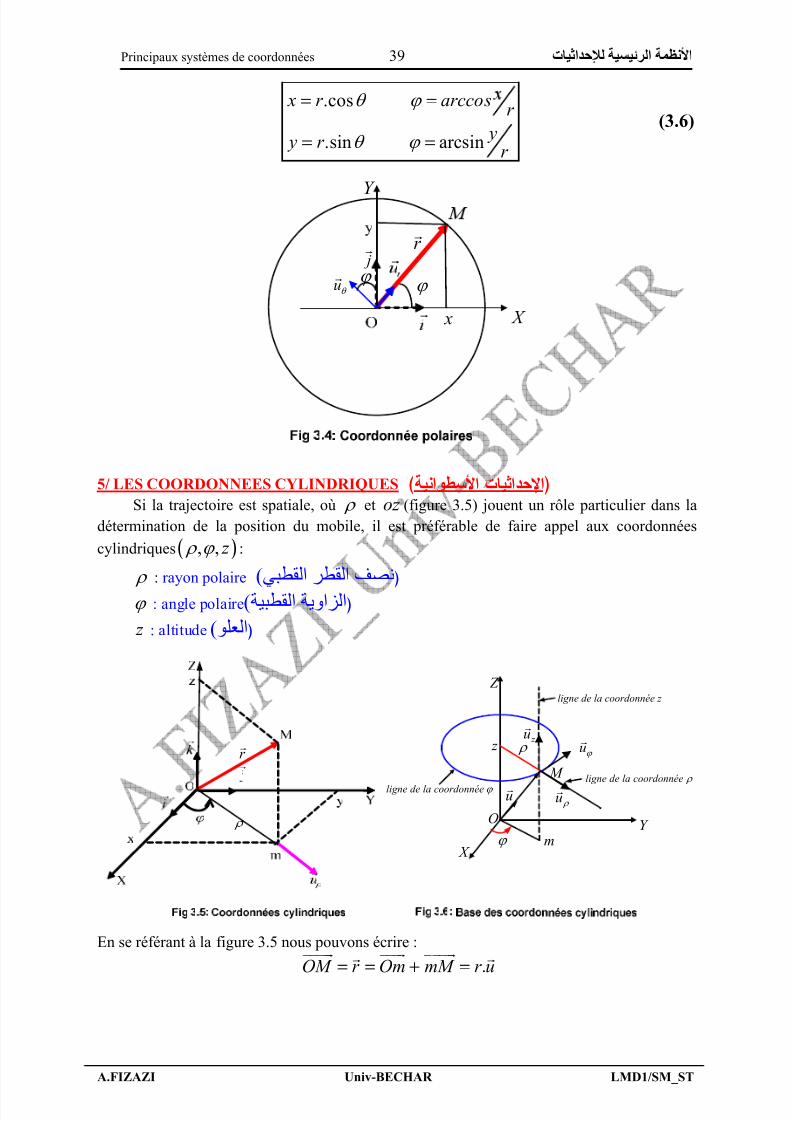
4/ LES COORDONNEES POLAIRES (!" )Quand le mouvement est plan, là aussi, on peut repérer la position du mobile par ses
coordonnées polaires ( ),r . (Fig3.4)
: Rayon polaire )H\]Z ]Z ^_(
: Angle polaire )\]Z `ab(
Le vecteur position dans ce repère s’écrit donc :.
r OM r r u= =
(3.4)
De la même façon que nous avons obtenu la relation (2.8), nous pouvons écrire dans ce
cas :
.sin .cosu i j = +
et .cos .sinr u i j = +
Ainsi nous pouvons écrire le vecteur position en coordonnées polaires comme suit :
. .r r
OM r A u A u
= = +
(3.5)
Où ( ),r A représente les deux composantes de OM
dans la base( ),r u u
.La relation qui lie les coordonnées rectangulaires aux coordonnées polaires est :
7/24/2019 Systèmes de Coordonnées_cours
http://slidepdf.com/reader/full/systemes-de-coordonneescours 4/7
Principaux systèmes de coordonnées
A.FIZAZI Univ-BECHAR LMD1/SM_ST
39
.cos
.sin arcsin
x r arccosr
y y r
r
= =
= =
(3.6)
u
j
x
r
Y
X
5/ LES COORDONNEES CYLINDRIQUES (#$ )Si la trajectoire est spatiale, où et oz (figure 3.5) jouent un rôle particulier dans la
détermination de la position du mobile, il est préférable de faire appel aux coordonnées
cylindriques( ), , z :
: rayon polaire )BCDEFG HDEFG IJK(
: angle polaire ) LMCDEFG LNOGPFG(
z : altitude )QRSFG(
r
ligne de la coordonnée z
Z
X
Y
M
O
u
z u
u
z
m
uligne de la coordonnée
ligne de la coordonnée
En se référant à la figure 3.5 nous pouvons écrire :
.OM r Om mM r u= = + =

7/24/2019 Systèmes de Coordonnées_cours
http://slidepdf.com/reader/full/systemes-de-coordonneescours 5/7
Principaux systèmes de coordonnées
A.FIZAZI Univ-BECHAR LMD1/SM_ST
40
D’où . .r u z k
= +
De même :
.cos .sinu i j = +
Attention à ne pas confondreu
et
r u
!!!
Nous pouvons écrire maintenant l’expression du vecteur position sous la forme :
. .cos . sin .
. . .
OM r i j k z
OM r i x j y k z
= = + +
= = + +
(3.8)
Nous pouvons transformer l’expression précédente du vecteur positionOM
sous la forme :
. . . z z
OM r A u A u A u
= = + +
(3.9)
Où( ), , z A A z = sont les composantes deOM
dans la base ( ), , z u u u k =
. Pour
obtenir l’expression du vecteur unitaire u
il suffit de se rendre compte que les vecteurs
unitaires qui constituent la base( ), , z
u u u k
=
sont perpendiculaires entre eux ; donc u
est
le produit vectoriel de z
u
et u
. Ainsi :
.sin .cos z u u u i j = = +
(3.10)
Par identification des relations (3.1) et (3.8) on en déduit les relations entre les coordonnées
cartésiennes et les coordonnées cylindriques :
2 2cos
sin /
arccos / arcsin /
x y x
y arctgy x
z z x y
= +=
= =
= = =
(3.11)
Remarque : si 0= z nous reconnaissons alors les coordonnées polaires qui ne sont donc
qu’un cas particulier des coordonnées cylindriques.
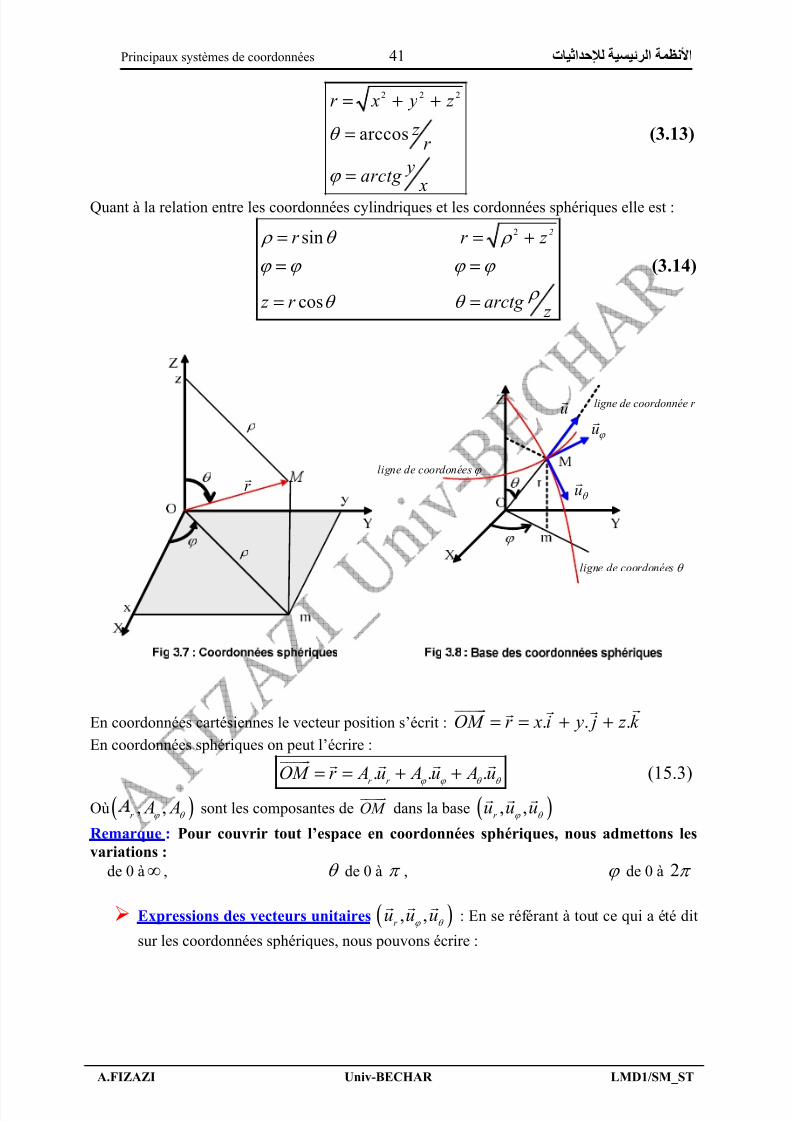
6/ LES COORDONNEES SPHERIQUES ( )Quand le point O et la distance séparant M de O, jouent un rôle caractéristique,
l’utilisation des coordonnées sphériques ( ), ,r est la mieux adaptée, avec :
: rayon polaire )BCDEFG HDEFG IJK(
: azimut )WXY(
: coaltitude )ZHSFG [\X]( Nous démontrons géométriquement (figure 3.7) les relations entre les coordonnées
cartésiennes et les coordonnés sphériques :
cos sin cos
sin sin sin
sin cos
x x r
y y r
r z r
= =
= =
= =
(3.12)
7/24/2019 Systèmes de Coordonnées_cours
http://slidepdf.com/reader/full/systemes-de-coordonneescours 6/7
Principaux systèmes de coordonnées
A.FIZAZI Univ-BECHAR LMD1/SM_ST
41
2 2 2
arccos
r x y z
z r
yarctg
x
= + +
=
=
(3.13)
Quant à la relation entre les coordonnées cylindriques et les cordonnées sphériques elle est :
2sin
cos
2r r z
z r arctg z
= = +
= =
= =
(3.14)
r
u
u
ligne de coordonnée r
u
ligne de coordonées
ligne de coordonées
En coordonnées cartésiennes le vecteur position s’écrit : . . .OM r x i y j z k = = + +
En coordonnées sphériques on peut l’écrire :
. . .r r
OM r A u A u A u
= = + +
)15.3(
Où( ), ,r
A A
sont les composantes de OM
dans la base ( ), ,r
u u u
Remarque : Pour couvrir tout l’espace en coordonnées sphériques, nous admettons les
variations :
de 0 à , de 0 à , de 0 à 2
Expressions des vecteurs unitaires ( ), ,r
u u u
: En se référant à tout ce qui a été dit
sur les coordonnées sphériques, nous pouvons écrire :
7/24/2019 Systèmes de Coordonnées_cours
http://slidepdf.com/reader/full/systemes-de-coordonneescours 7/7
Principaux systèmes de coordonnées
A.FIZAZI Univ-BECHAR LMD1/SM_ST
42
.
. .cos sin
. . cos .
.sin
r r r u Om mM
Om u i j
mM z k k r
r
= = +
= = +
= =
=
Nous en déduisons : .cos .sin .sin .sin .cosr r i j k = + +
Il nous apparaît clairement l’expression de u
:
.cos .sin .sin .sin .cosr u i j k = + +
(3.16)
Connaissant le vecteur :
.sin .cosu i j = +
Il nous reste à déterminer le vecteur u
. La base ( ), ,
r u u u
étant orthogonale, le
vecteur unitaire u
est donc le résultat du produit vectoriel entre u
et u
.
.cos cos .cos sin .sinr u u u i j k = = +
(3.17)
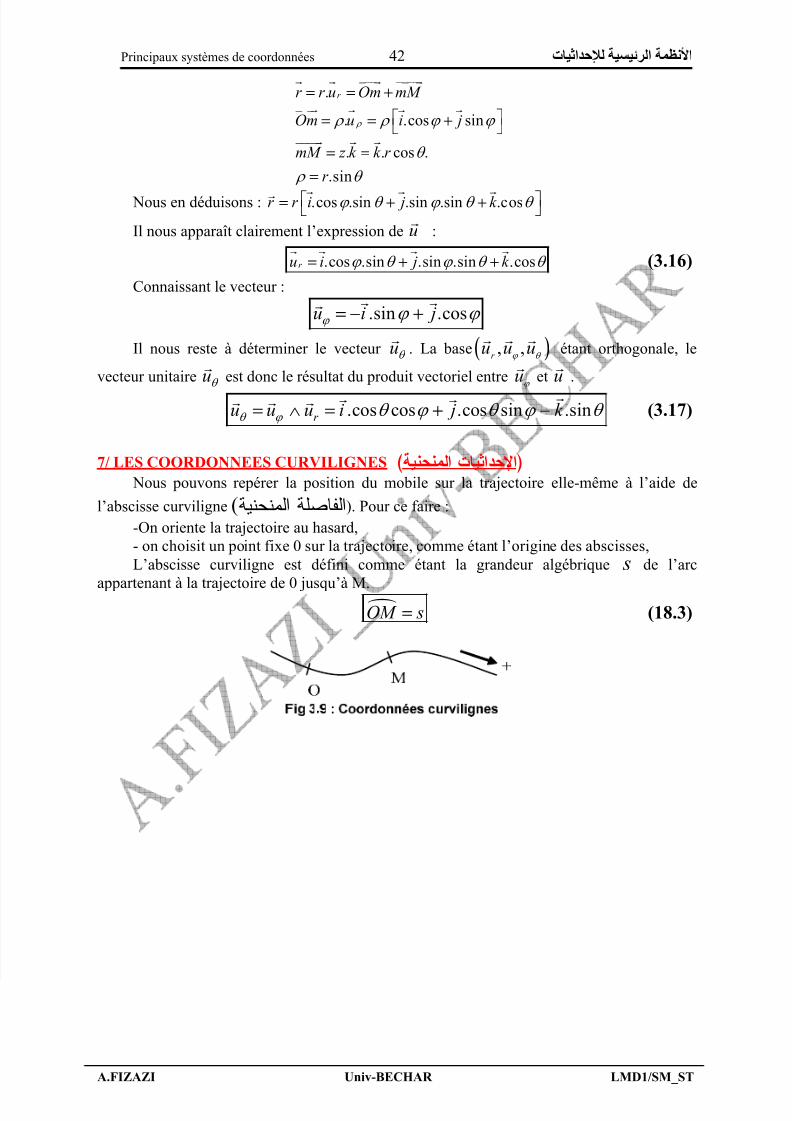
7/ LES COORDONNEES CURVILIGNES (## ) Nous pouvons repérer la position du mobile sur la trajectoire elle-même à l’aide de
l’abscisse curviligne ( ). Pour ce faire :
-On oriente la trajectoire au hasard,
- on choisit un point fixe 0 sur la trajectoire, comme étant l’origine des abscisses,
L’abscisse curviligne est défini comme étant la grandeur algébrique s de l’arc
appartenant à la trajectoire de 0 jusqu’à M. OM s= )18.3(



![Commande numérique de systèmes dynamiques · 2018. 5. 30. · Commande numérique de systèmes dynamiques Commande numérique de systèmes dynamiques [texte imprimé]. - 2015. -](https://img.pdfslide.fr/doc/110x75/6136c5820ad5d20676483bea/commande-numrique-de-systmes-dynamiques-2018-5-30-commande-numrique-de.jpg)

























