Embed Size (px)
Citation preview
INSTITUT NATIONAL POLYTECHNIQUE DE GRENOBLE
N° attribué par la bibliothèque
THESE
pour obtenir le grade de
DOCTEUR DE L’INPG
Spécialité : « Optique, Optoélectronique et Micro-ondes »
préparée au Département Systèmes du LÉTI - CEA Grenoble dans le cadre de l’École Doctorale :
« Électronique, Électrotechnique, Automatique et Traitement du Signal »
présentée et soutenue publiquement
par
Vincent DELAYE
le 7 septembre 2000
Titre :
Etude et réalisation d’un télémètre laser par temps de vol
Directeur de thèse : M. Germain CHARTIER
JURY
M. Jean-Louis MEYZONNETTE, Rapporteur et Président M. Ali MOHAMAD-DJAFARI, Rapporteur M. Germain CHARTIER, Directeur de thèse M. Christian DUJEU, Examinateur M. Pierre LABEYE, Responsable CEA
REMERCIEMENTS
Ce travail s’est déroulé au sein du groupe Technologie de Contrôle industriel du LETI
(TCI) dirigé par Monsieur Philippe RIZO, je le remercie vivement pour m’avoir accueilli et pour ses
conseils avisés. Messieurs Bernard BARBIER, chef du Département Systèmes (DSYS) et Hervé
FANET, chef du Service Capteurs et Systèmes d’Imagerie (SCSI), m’ont donné les moyens nécessaires
à la réalisation de ce projet, je les en remercie tout particulièrement.
Je tiens à remercier Monsieur Pascal BESESTY, mon responsable CEA et chef de projet
en Télémétrie Laser au début de cette thèse. Je lui souhaite bonne chance dans ses nouvelles
fonctions.
Mes remerciements vont également à Monsieur Pierre LABEYE, responsable CEA des
deux dernières années de cette thèse pour m’avoir, fait partager ses compétences « d’opticien » tant
sur le plan théorique que pratique, et pour avoir aiguisé mon sens critique vis à vis de mes propres
travaux. Les expérimentations « nocturnes » n’aurait pu avoir lieu sans sa grande disponibilité et
précieuse aide. Merci aussi pour m’avoir laissé gagné quelques parties de squash.
Monsieur Germain CHARTIER, Professeur de l’Institut National Polytechnique de
Grenoble a dirigé cette thèse. Je le remercie cordialement pour sa disponibilité, ses conseils
inestimables et ses encouragements.
Je remercie également Messieurs Ali MOHAMMAD-DJAFARI, professeur à l’École
Supérieure d’Electricité, et Jean-Louis MEYZONNETTE, professeur à l’École Supérieure d’Optique,
d’avoir accepté d’examiner et juger ce travail, les discussions que nous avons eu m’ont beaucoup
apporté.
Je tiens aussi à exprimer mes remerciements à Monsieur Christian DUJEU, Directeur
Technique de la société SESO à Aix-en-Provence, qui a accepter de faire parti du jury.
Enfin, je tiens à exprimer ma sympathie et toute ma reconnaissance aux membres des
groupes Technologies de Contrôle Industriel et Electronique et Biologie : André, Véronique, Henri,
Roland, Vincent, Fabrice, Hervé, Michel, Dominique, Philippe, Arnaud, Alexandre, Jean-Paul...
Pour terminer, je tiens à remercier tout particulièrement et avant tout ma famille et belle-
famille, en particulier Magali, ainsi que mes amis pour m’avoir soutenu moralement et encouragé
tout au long de ces trois années.
Sommaire

Sommaire
O
Introduction Générale page 1
Partie I , Etat de l’art en télémétrie laser page 3
Partie II , Télémétrie laser temps de vol page 30
Partie III , Amélioration des performances des télémètres laser temps de vol page 78
Partie IV , Etude expérimentale page 128
Conclusion Générale page 165
Annexes page 167
Bibliographie page 176
O
Introduction Générale
Introduction Générale
1
O
« Un télémètre à laser est un dispositif qui permet d’effectuer des mesures de distance ou de vitesse
sans contact, avec une grande résolution spatiale »
Pascal BESESTY, « Télémètre à laser puce », Techniques de l’Ingénieur, volume R6, mars 1999.
O
Un télémètre laser est un système de télédétection actif, au même titre que le radar, avec la
particularité de permettre de mesurer une distance avec une forte résolution spatiale. Le radar utilise un
rayonnement électromagnétique de longueur d’onde λ de l’ordre du cm. La divergence minimale
pouvant être obtenue à la sortie d’un émetteur est limitée par la diffraction à λ/D où D est le diamètre
de l’antenne. L’utilisation des ondes optiques, la longueur d’onde λ est de l’ordre du µm, permet de
réduire la divergence du faisceau pour une surface d’émission donnée d’un rapport allant de 104 à 105.
Cela permet ainsi de localiser précisément la mesure.
Les premiers domaines d’application des télémètres étaient à l’origine militaire et
scientifique, une des premières applications consistait à mesurer la distance séparant notre planète de la
lune. Le développement des sources laser à semi-conducteurs, plus communément connues sous le
nom de diodes laser, a largement contribué, grâce à leur faible coût, leur large diffusion, leurs faibles
dimensions, leur facilité d’emploi, au développement des dispositifs de télémétrie pour les domaines
d’application industriel et civil. Par exemple, l’utilisation d’un télémètre disposé à l’avant d’une
automobile a été envisagé comme système d’anti-collision : le télémètre détecte tout objet se trouvant
sur la trajectoire du véhicule et évalue sa distance, cette information peut alors être transmise au
conducteur. Un télémètre, installé sur le pont d’un bateau, peut être utilisé pour l’aide à la navigation
côtière ou fluviale. De nombreuses applications, dans le domaine des transports, où l’évaluation des
distances est importante, peuvent encore être imaginées. Dans le domaine de la géologie et de la
topographie, un outil comme le télémètre laser facilite les relevés de terrain. Les activités de loisirs sont
également concernées, en effet certaines enseignes de sports proposent à leurs clients chasseurs ou
golfeurs des télémètres laser portables pour les aider dans la pratique de leur activité.
L’application visée, pour laquelle nous avons effectué ce travail, est l’imagerie en trois
dimensions. En robotique mobile, des images résolues en distance permettent aux robots, par exemple
chargés du démantèlement d’une centrale nucléaire, de se localiser précisément dans cet environnement
hostile. Dans le domaine des multimédias et de la réalité virtuelle, les images tridimensionnelles offrent
un intérêt grandissant, la reproduction, d’œuvres d’art ou de sites historiques par exemple, sur support
numérique peut être envisagée pour la constitution de musées virtuels.
Introduction Générale
2
Chaque application possède des contraintes liées à la nature de la mesure. Pour un système
d’anti-collision automobile, par exemple, il n’est pas forcément nécessaire d’obtenir une mesure de
distance avec une précision de l’ordre du centimètre, par contre des cibles éloignées de quelques
centaines de mètres doivent être détectées, de plus la fréquence ou cadence des mesures doit être
importante en particulier lorsque la vitesse relative des objets sur la trajectoire du véhicule est élevée.
Dans le cas d’un relevé topographique, la précision désirée est quelque fois importante, de l’ordre du
millimètre : un délai de quelques secondes, avant la fourniture d’une mesure est acceptable. Dans le cas
d’une application d’imagerie en trois dimensions, les objets peuvent être éloignés de plusieurs
centaines de mètres, la restitution des détails de l’objet nécessite une bonne précision, de l’ordre du
centimètre, et la cadence des mesures doit être la plus rapide possible : le temps mis pour la capture
d’une image doit être raisonnable sachant que le nombre de mesures donne la résolution de celle ci.
Mis à part le coût du dispositif, nous pouvons donc différentier trois spécifications techniques pour la
conception d’un système de télémétrie laser : la portée, la précision et la cadence des mesures.
Dans la première partie de ce document nous décrirons différents systèmes et techniques
de télémétrie laser. Cet état de l’art nous permettra de sélectionner la technique dont les performances
sont compatibles avec les spécifications de l’application d’imagerie tridimensionnelle visée : la
télémétrie laser temps de vol.
La deuxième partie sera consacrée à la présentation et à l’étude théorique des
performances de la technique de mesure de distance par télémétrie laser temps de vol, cette étude
générale pourra être utilisée pour la conception de télémètres. Cette technique est étudiée au Léti depuis
quelques années dans le cadre d’applications diverses. Les télémètres du Léti ont la particularité
d’utiliser des sources laser solides miniatures : les microlasers. Ces lasers, tout en conservant les
avantages des diodes laser, possèdent des caractéristiques qui les rendent très attractifs pour la
télémétrie.
Nous proposons en troisième partie d’améliorer les performances des télémètres temps de
vol afin d’atteindre les spécifications souhaitées. Nous mettrons en évidence l’intérêt de la conversion
analogique numérique rapide en vue du traitement des signaux télémétriques pour la mesure précise de
distance et pour l’amélioration de la portée. Nous mentionnerons également les techniques optiques
d’amélioration proposées dans la littérature.
C’est dans la quatrième partie que nous aborderons la description du télémètre à
configuration variable réalisé. Ce télémètre nous permettra de valider les performances, estimées dans
la troisième partie, expérimentalement.
O
Partie I :
Etat de l’art en télémétrie laser
Partie I : Etat de l’art en télémétrie laser
3
TABLE DES MATIÈRES
1. INTRODUCTION ________________________________________________________ 4
2. GÉNÉRALITÉS SUR LES CAPTEURS ______________________________________ 6
2.1 Définition d’un capteur ______________________________________________________ 6
2.2 Propriétés des capteurs ______________________________________________________ 6
3. PROPRIÉTÉS DES SIGNAUX TÉLÉMÉTRIQUES ____________________________ 7
3.1 Signal émis ________________________________________________________________ 8
3.2 Signal reçu_________________________________________________________________ 8
3.3 Détection de signaux optiques _________________________________________________ 9
4. PRÉCISION DES MESURES______________________________________________ 10
4.1 Erreurs systématiques______________________________________________________ 10
4.1.1 Géométrique ____________________________________________________________________ 10
4.1.2 Taille du faisceau sur la cible et inclinaison de la cible_____________________________________ 11
4.2 Erreurs aléatoires__________________________________________________________ 11
4.2.1 Erreur due à la turbulence atmosphérique ______________________________________________ 11
4.2.2 Erreur liée au rapport signal sur bruit _________________________________________________ 12
5. PORTÉE DES TÉLÉMÈTRES_____________________________________________ 14
5.1 Détection des cibles_________________________________________________________ 14
5.2 Portée____________________________________________________________________ 17
6. SYSTEMES UTILISANT UNE DÉTECTION COHÉRENTE ____________________ 18
6.1 Télémétrie impulsionnelle à détection cohérente_________________________________ 18
6.2 Télémétrie à modulation linéaire de la fréquence optique (FMCW) _________________ 20
7. SYSTEMES UTILISANT UNE DÉTECTION DIRECTE________________________ 22
7.1 Télémétrie par comparaison de phase _________________________________________ 22
7.2 Télémétrie à modulation du type « Chirp » _____________________________________ 23
7.3 Télémétrie à modulation d’intensité pseudo-aléatoire_____________________________ 24
7.4 Télémétrie temps de vol _____________________________________________________ 25
8. TRIANGULATION ______________________________________________________ 27
9. CONCLUSION__________________________________________________________ 29
Partie I : Etat de l’art en télémétrie laser
4
1. INTRODUCTION
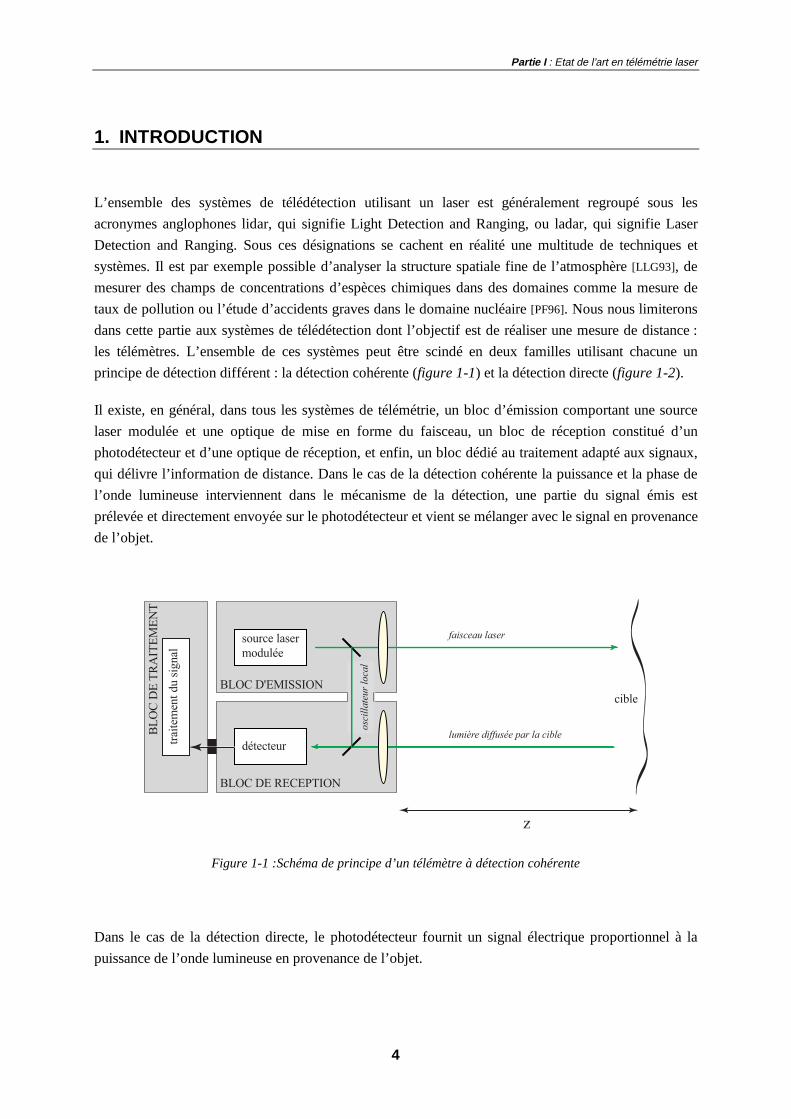
L’ensemble des systèmes de télédétection utilisant un laser est généralement regroupé sous les
acronymes anglophones lidar, qui signifie Light Detection and Ranging, ou ladar, qui signifie Laser
Detection and Ranging. Sous ces désignations se cachent en réalité une multitude de techniques et
systèmes. Il est par exemple possible d’analyser la structure spatiale fine de l’atmosphère [LLG93], de
mesurer des champs de concentrations d’espèces chimiques dans des domaines comme la mesure de
taux de pollution ou l’étude d’accidents graves dans le domaine nucléaire [PF96]. Nous nous limiterons
dans cette partie aux systèmes de télédétection dont l’objectif est de réaliser une mesure de distance :
les télémètres. L’ensemble de ces systèmes peut être scindé en deux familles utilisant chacune un
principe de détection différent : la détection cohérente (figure 1-1) et la détection directe (figure 1-2).
Il existe, en général, dans tous les systèmes de télémétrie, un bloc d’émission comportant une source
laser modulée et une optique de mise en forme du faisceau, un bloc de réception constitué d’un
photodétecteur et d’une optique de réception, et enfin, un bloc dédié au traitement adapté aux signaux,
qui délivre l’information de distance. Dans le cas de la détection cohérente la puissance et la phase de
l’onde lumineuse interviennent dans le mécanisme de la détection, une partie du signal émis est
prélevée et directement envoyée sur le photodétecteur et vient se mélanger avec le signal en provenance
de l’objet.
z
source laser
modulée
détecteur
BLOC DE RECEPTION
BLOC D'EMISSION
BLOCDETRAITEMENT
traitementdusignal
faisceau laser
lumière diffusée par la cible
cible
oscillateurloca
l
Figure 1-1 :Schéma de principe d’un télémètre à détection cohérente
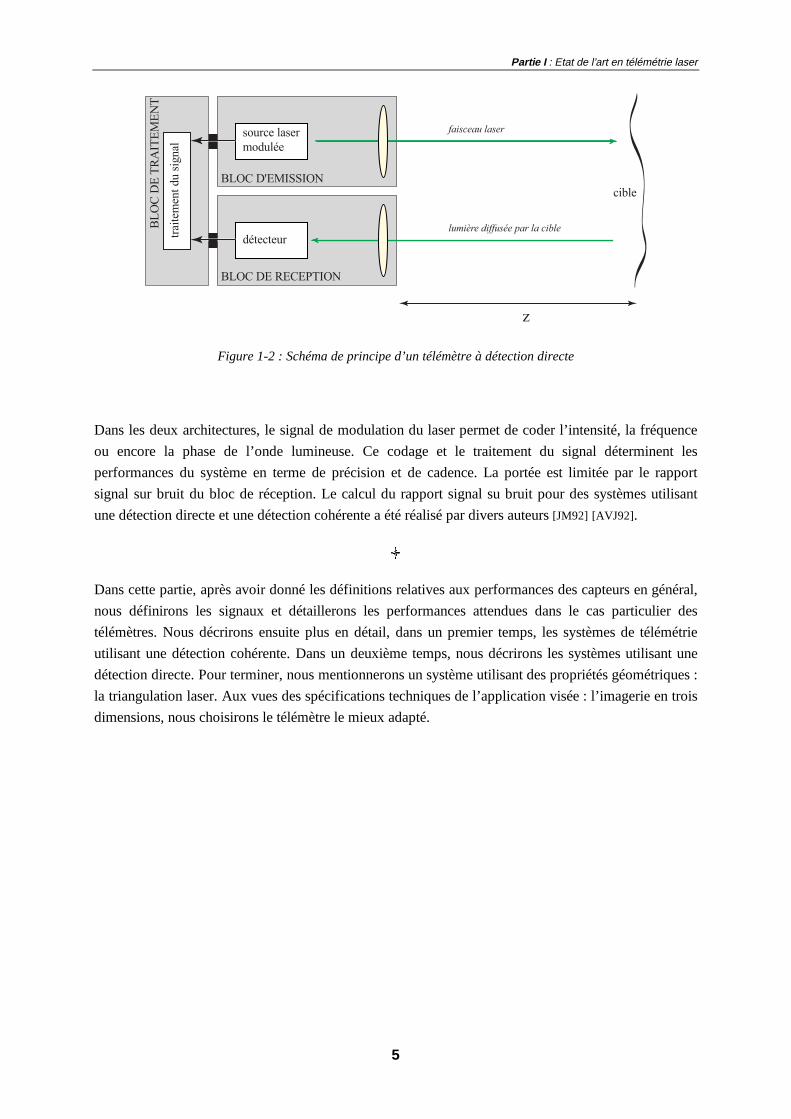
Dans le cas de la détection directe, le photodétecteur fournit un signal électrique proportionnel à la
puissance de l’onde lumineuse en provenance de l’objet.
Partie I : Etat de l’art en télémétrie laser
5
z
source laser
modulée
détecteur
BLOC DE RECEPTION
BLOC D'EMISSION
BLOCDETRAITEMENT
traitementdusignal
faisceau laser
lumière diffusée par la cible
cible
Figure 1-2 : Schéma de principe d’un télémètre à détection directe
Dans les deux architectures, le signal de modulation du laser permet de coder l’intensité, la fréquence
ou encore la phase de l’onde lumineuse. Ce codage et le traitement du signal déterminent les
performances du système en terme de précision et de cadence. La portée est limitée par le rapport
signal sur bruit du bloc de réception. Le calcul du rapport signal su bruit pour des systèmes utilisant
une détection directe et une détection cohérente a été réalisé par divers auteurs [JM92] [AVJ92].
O
Dans cette partie, après avoir donné les définitions relatives aux performances des capteurs en général,
nous définirons les signaux et détaillerons les performances attendues dans le cas particulier des
télémètres. Nous décrirons ensuite plus en détail, dans un premier temps, les systèmes de télémétrie
utilisant une détection cohérente. Dans un deuxième temps, nous décrirons les systèmes utilisant une
détection directe. Pour terminer, nous mentionnerons un système utilisant des propriétés géométriques :
la triangulation laser. Aux vues des spécifications techniques de l’application visée : l’imagerie en trois
dimensions, nous choisirons le télémètre le mieux adapté.
Partie I : Etat de l’art en télémétrie laser
6
2. GÉNÉRALITÉS SUR LES CAPTEURS
Un télémètre laser est donc constitué de différentes parties qui peuvent être considérées
indépendamment les unes des autres ou au contraire de façon globale. L’approche sous la forme d’un
système complet revient à présenter un télémètre comme un capteur de distance intelligent qui fournit
une information de distance suite à une excitation électro-optique. Par conséquent, en considérant tout
d’abord le télémètre en tant que système, nous commençons notre présentation par quelques définitions
relatives aux capteurs dont nous aurons besoin par la suite.
2.1 Définition d’un capteur
Un capteur est un système qui transforme un stimulus, a priori de nature physique quelconque, en un
signal électrique, image de la réponse au stimulus. Nous limitons notre définition aux capteurs
délivrant une grandeur de sortie électrique, ce qui est le cas le plus courant de nos jours. Le signal
électrique peut être par la suite caractérisé par son amplitude, sa fréquence, sa densité spectrale, sa
phase son énergie ou sa puissance.
CAPTEUR
Stimulus :excitation mécanique,
magnétique, optique,
chimique
Réponse :signal électrique
caractéristique du
capteur
Figure 2-1 : Capteur
Un capteur appartient généralement à un système complet, comportant d’autres capteurs, des
conditionneurs ou transducteurs, des filtres, des codeurs, des actionneurs et un système d’acquisition
des données mesurées. De plus, la tendance actuelle s’oriente vers une intégration de plus en plus
poussée des éléments de traitement numérique des données dans le capteur proprement dit. Les
capteurs deviennent progressivement intelligents : la réponse n’est plus un simple signal électrique mais
une information issue de ce signal en vue de son utilisation.
2.2 Propriétés des capteurs
Des grandeurs caractéristiques communes à tous les types de capteurs ont été définies afin de pouvoir
comparer leurs performances plus aisément.
Partie I : Etat de l’art en télémétrie laser
7
Précision : La précision est représentée par l’écart entre la sortie réelle du capteur et la valeur idéale de
cette sortie. Elle est d’autant meilleure que cet écart est faible. Le terme d’erreur est également employé
pour quantifier la précision à travers l’évaluation numérique de l’écart. Les erreurs peuvent avoir des
origines diverses, soit elles sont liées au capteur, soit elles dépendent de l’environnement. Elles peuvent
être séparées de la façon suivante :
Erreur systématique : l’erreur prend une valeur identique pour une cause donnée, c’est à priori l’erreur
due à un défaut reproductible du système ou capteur, et par conséquent, elle peut être corrigée lors d’un
étalonnage.
Erreur aléatoire (au sens mathématique) : son influence peut être réduite en augmentant le nombre de
mesures. En effet, l’incertitude sur la mesure se traduit par la probabilité que la grandeur de sortie, par
exemple la distance z, soit comprise entre z - ε et z + ε à 95 % près. Si la distribution de probabilité
est normale d’écart-type σ alors ε = 2σ.
Erreur liée à l’environnement : elle traduit l’influence de paramètres extérieurs tels que la température,
le degré d’hygrométrie, la présence de champ électromagnétique... Il est parfois nécessaire de protéger
le capteur contre ces grandeurs d’influence.
Dans tous les cas, il est nécessaire de tenir compte de toutes les sources d’erreurs afin de connaître la
précision du système.
Résolution : La résolution est déterminée par le plus petit incrément du stimulus qui peut être détecté
en sortie. Il s’agit en fait de la capacité de distinguer deux valeurs de stimulus très proches l’une de
l’autre.
Sensibilité : La sensibilité caractérise la capacité à fournir une forte variation de la grandeur de sortie S
pour une faible variation de la grandeur d’entrée E. Elle est représentée par un coefficient de sensibilité
s donné par la pente dS/dE.
Etendue de mesure : L’étendue de mesure est l’écart entre les valeurs extrêmes que peut fournir le
capteur.
Linéarité : La linéarité caractérise la qualité de la mesure pour un capteur donnant comme grandeur de
sortie une fonction linéaire de l’entrée.
Reproductibilité : La reproductibilité traduit la capacité à reproduire une sortie donnée pour une entrée
donnée, dans les mêmes conditions de mesure. Dans le cas où les résultats issus des mesures sont
dispersés, il est possible de définir une erreur de fidélité du capteur.
3. PROPRIÉTÉS DES SIGNAUX TÉLÉMÉTRIQUES
Nous présentons ici les signaux télémétriques à partir desquels la mesure de distance est possible.

Partie I : Etat de l’art en télémétrie laser
8
3.1 Signal émis
Comme nous l’avons vu précédemment, en télémétrie, le signal de modulation appliqué au laser
permet de coder l’intensité, la fréquence ou la phase de l’onde électromagnétique émise1. Dans le cas
des radars, la fréquence de cette onde électromagnétique appelée porteuse, est de l’ordre de quelques
kHz à plusieurs GHz. La fréquence de la porteuse dans le visible et le proche infrarouge est de
quelques centaines de THz. Nous allons nous intéresser au champ électrique de cette onde
électromagnétique émise, noté dans le plan complexe :
( ) ( ) exp[2 ]tE t s t j f tπ= ⋅ (3.1)
3.2 Signal reçu
Supposons une cible ponctuelle, située à la distance z0 à l’origine des temps et animée d’une vitesse
radiale v constante, positive en rapprochement. La cible rétrodiffuse une partie de l’énergie émise avec
le signal E(t). Le signal reçu à l’instant t est égal au signal émis, affecté d’un coefficient d’atténuation γ
et retardé de τ :
( ) ( )r tE t E tγ τ= ⋅ − (3.2)
La distance entre le télémètre et la cible s’écrit alors :
0( )z t z v t= − ⋅ (3.3)
Le signal reçu à l’instant t a été émis à l’instant t −τ et a donc été réfléchi par l’objet à l’instant 2t τ− .
Par conséquent, la distance parcourue sur le trajet aller-retour est donnée par :
022 2
c z t z v tτ ττ ⋅ = ⋅ − = − ⋅ −
(3.4)
Il vient donc :
' tτ τ ε= − ⋅ (3.5)
avec :
02'
z
c vτ =
− et
2v
c vε =
− (3.6)
Finalement :
( ) ( )( ) (1 ) ' exp 2 (1 ) 'rE t s t j f tγ ε τ π ε τ= ⋅ + ⋅ − ⋅ ⋅ + ⋅ − (3.7)
1 Afin de simplifier la suite du raisonnement, nous supposerons que l’onde électromagnétique émise par le laser est plane et polarisée rectilignement.

Partie I : Etat de l’art en télémétrie laser
9
Le signal reçu est un signal sinusoïdal à la fréquence (1 )f ε⋅ + modulé par le signal enveloppe a. Le
déplacement radial de la cible provoque une modification de l’échelle des temps qui est multipliée par
(1 )ε+ . Compte tenu des vitesses mises en jeu, la modification de l’échelle des temps est négligeable
et :
( ) ( )(1 ) ' 's t s tε τ τ+ ⋅ − ≈ − (3.8)
Comme v c� , la distance de la cible se traduit par un simple retard entre le signal reçu et le signal
émis :
02'
z
cτ τ≈ ≈ (3.9)
La modification de l’échelle des temps décale la fréquence d’émission d’une quantité appelée
fréquence Doppler. Comme v c� il vient :
2d
vf fε
λ= ⋅ ≈ (3.10)
où λ est la longueur d’onde d’émission :
c
fλ = (3.11)
Le signal de réception est donc de la forme :
( ) [ ] [ ]( ) exp 2 ( ) exp 2r dE t s t j f f t j fγ τ π π τ= ⋅ − ⋅ + ⋅ ⋅ − (3.12)
temps de vol (distance) : 02z
cτ = (3.13)
fréquence Doppler (vitesse) : 2
d
vf
λ= (3.14)
En télémétrie, c’est le temps de vol τ qui est généralement exploité pour la mesure de distance. Le
déphasage 2fπ τ est utilisé en interférométrie pour mesurer des déplacements et enfin la mesure du
décalage Doppler fd permet de déterminer la vitesse de déplacement de la cible.
3.3 Détection de signaux optiques
L’effet photoélectrique est le mécanisme le plus utilisé pour détecter les signaux optiques. Cet effet
n’est pas instantané mais possède un temps caractéristique tc de l’ordre de 1 ns dans les semi-
conducteurs. La probabilité d’absorption d’un photon par un électron est proportionnelle au carré du
champ intégré sur le temps caractéristique tc.
L’intensité du courant électrique délivré par le détecteur est donc proportionnelle au carré du champ et
s’écrit dans le cas du signal optique étudié précédemment :
Partie I : Etat de l’art en télémétrie laser
10
*1( ) ( ) ( )
ct t
c t
i t s t s t dtt
γ τ τ+
= ℜ − ⋅ − ⋅∫ (3.15)
où ℜ est la sensibilité du détecteur. Cette expression permet de déterminer l’allure du courant
photoélectrique. Dans le cas d’une détection cohérente il est possible de détecter le module et
l’argument de l’enveloppe complexe ( )s t τ− . Lorsque la détection est directe, l’information de phase
est perdue car la réponse du récepteur est quadratique et lente par rapport à la fréquence optique. Nous
allons maintenant nous intéresser aux limites fondamentales d’un système de télémétrie laser en terme
de précision et de portée.
4. PRÉCISION DES MESURES
En télémétrie la précision d’une mesure est principalement liée à deux incertitudes. La première notée
sysδ est systématique et imputable aux instruments et méthodes de mesure et donc dépendante du
système. Par exemple, si la grandeur mesurée est une distance z avec une erreur systématique zδ , alors
la valeur réelle de la distance est donnée par zz δ+ . De plus, si plusieurs erreurs systématiques
viennent se superposer il suffit d’en ajouter leur valeur en tenant compte de leur signe. La seconde
notée aléaσ est aléatoire, si l’on considère n effets indépendants générant aléaσ il vient :
2
0 i
n
aléa iσ σ
== ∑ (4.1)
Dans les deux prochains paragraphes, nous allons mentionner les principales sources d’erreurs
systématiques et aléatoires intervenant dans les systèmes télémétriques.
O
4.1 Erreurs systématiques
4.1.1 Géométrique
Nous avons vu dans l’introduction de cette partie que les systèmes télémétriques étaient composés de
module d’émission et de réception. Si la distance entre les axes des deux modules est notée e et la
distance entre le télémètre et la cible est notée z, alors la distance mesurée s’écrit :
( )2 21
2z z e+ + (4.2)
En général cette erreur systématique est négligée pour des distances importantes : e z� . Par exemple,
pour une cible à 50 m et un entre-axe de 10 cm la distance mesurée est sur estimée de 100 µm.

Partie I : Etat de l’art en télémétrie laser
11
4.1.2 Taille du faisceau sur la cible et inclinaison de la cible
Jusqu'à présent, nous avons supposé que le faisceau était ponctuel. En pratique, dans le cas d’une cible
quelconque, cette hypothèse est rarement vérifiée. La surface de la cible peut être inclinée par rapport
au faisceau ou encore irrégulière avec des discontinuités. Cette réalité induit des distorsions plus ou
moins importantes sur les signaux. Plus la tache sur la cible sera importante plus les signaux seront
sujets à ces distorsions. Ces effets peuvent introduire, selon la méthode de traitement utilisée, une
erreur supplémentaire.
Par exemple dans le cas d’un télémètre temps de vol, l’incidence du faisceau sur un plan incliné aura
pour effet d’élargir les impulsions. L’utilisation d’une détection à seuil sur le front de monté de
l’impulsion aura donc pour effet de sous estimer la distance mesurée.
Les dimensions de la tache laser sur la cible limitent donc le sens du mot « précision » à celles ci. De
plus, contrairement à l’erreur géométrique qui est parfaitement connue, cette erreur est dépendante des
caractéristiques de la cible à priori inconnues et n’est donc pas compensable. Il faut ajouter que cette
erreur est beaucoup moins importante que pour les radars, le faisceau laser ayant un pouvoir de
localisation de la mesure bien supérieur. Par exemple, pour un faisceau avec une divergence de
0,1 mrad, la tache laser sur une cible à 50 m a un diamètre de 5 mm : la précision est limitée à celle
valeur.
4.2 Erreurs aléatoires
4.2.1 Erreur due à la turbulence atmosphérique
Comme nous l’avons vu précédemment la formule (3.13) est utilisée pour déterminer la distance du
télémètre à la cible en fonction du temps de vol et de la vitesse de la lumière. Cette formule a été écrite
dans l’hypothèse où le milieux traversé par le faisceau laser est le vide. Or l’indice de l’air n’est pas
parfaitement égal à un et peut également varier le long du chemin optique : la valeur de l’indice de
réfraction n est dépendante des conditions de température et de pression variants localement dans
l’atmosphère. La formule (3.13) s’écrit alors :
02nz
cτ = (4.3)
Où 1,0003n = représente l’indice moyen le long du trajet optique. La variance maximale de l’indice
est donnée par [HW92] :
2 2 2 /30n nC Lσ = ⋅ (4.4)
où Cn est le coefficient de structure de l’indice et L0 l’échelle supérieure de la turbulence soit la
distance de la cible par rapport au télémètre. Prenons un exemple où la turbulence est maximale, soit
Cn = 10-7. Une cible éloignée de 1 km introduira un écart-type sur l’indice de 10-6 qui a son tour
introduira un écart-type de 1 mm sur la mesure de distance z. A 50 m l’écart-type sur l’indice est de
3,7.10-7, sur la distance il est d’environ 20 µm.
Partie I : Etat de l’art en télémétrie laser
12
4.2.2 Erreur liée au rapport signal sur bruit
En prenant comme hypothèse de détection le filtrage adapté en présence de bruit blanc, Woodward
[PMW53] a montré que l’erreur quadratique moyenne (écart-type) sur le temps de vol τσ ,liée au bruit de
fond qui se superpose au signal, est donnée par la relation :
1
2 RSBτσ
π=
⋅ Φ ⋅ (4.5)
soit l’erreur quadratique moyenne (écart-type) sur la mesure de distance :
4z
c
RSBσ
π=
⋅ Φ ⋅ (4.6)
Où RSB est le rapport signal sur bruit des puissances électriques de la détection. Le paramètre Φ est
l’étendue spectrale :
[ ][ ]
22
2
2
TF ( )
TF ( )
f s t df
s t df
+∞
−∞+∞
−∞
Φ = ∫∫
(4.7)
En utilisant le formalisme précédent, l’erreur quadratique moyenne sur la mesure de la fréquence
Doppler s’écrit :
1
2f
RSBσ
π=
⋅ Θ ⋅ (4.8)
soit l’erreur quadratique moyenne (écart-type) sur la mesure de vitesse :
4v
RSB
λσπ
=⋅ Θ ⋅
(4.9)
où le paramètre Θ est l’étendue temporelle :
22
2
2
( )
( )
t s t dt
s t dt
+∞
−∞+∞
−∞
Θ = ∫∫
(4.10)
Le principe d’incertitude radar s’exprime par la relation :
1
4πΦ ⋅ Θ ≥ (4.11)
Cette inégalité s’obtient en faisant le produit des relations (4.7) et (4.10) et en utilisant l’inégalité de
Cauchy-Schwarz. La formule (4.11) peut être utilisée pour quantifier l’erreur quadratique moyenne sur
la mesure d’un temps ou bien d’une fréquence. En effet, le produit fτσ σ⋅ s’exprime, compte tenu de
(4.11), par l’inégalité :

Partie I : Etat de l’art en télémétrie laser
13
2
1
4f RSBτσ σπ
⋅ ≤⋅ ΦΘ ⋅
(4.12)
Cette relation montre qu’il est possible de réduire simultanément l’erreur quadratique moyenne d’une
mesure temporelle (mesure du temps de vol) et l’erreur quadratique moyenne d’une mesure
fréquentielle (mesure de la fréquence Doppler) en maximisant le rapport signal sur bruit ou bien le
produit ΦΘ : un produit ΦΘ élevé peut être obtenu, par exemple, en utilisant une impulsion ayant un
spectre large et une durée importante (typiquement une impulsion d’enveloppe gaussienne modulé
linéairement en fréquence).
Voici dans le cas d’une impulsion gaussienne non modulée en fréquence, utilisée généralement en
télémétrie laser temps de vol et en télémétrie impulsionnelle à détection cohérente, de la forme :
2
( ) expt
s tω
= − (4.13)
les valeurs de Φ et Θ :
1
2π ωΦ =
⋅ et
2
ωΘ = (4.14)
Il vient :
RSBτ
ωσ = et 1
fRSB
σπ ω
=⋅ ⋅
(4.15)
Comme nous l’avons vu précédemment au paragraphe 3.3, dans le cas d’une détection directe
l’information de phase est perdue, l’accès à la mesure de la fréquence Doppler, donc de vitesse, est
impossible. Dans le cas d’une détection cohérente l’obtention d’une faible erreur quadratique moyenne
sur la mesure de temps de vol se fait au détriment de l’écart-type sur la mesure de la fréquence
Doppler : par exemple, pour une impulsion de demi largeur à e-1 ω = 1 ns et un rapport signal sur bruit
de 50, l’écart-type sur la mesure de distance est d’environ 2 cm alors que l’écart-type sur la mesure de
vitesse est d’environ 240 m/s. Les télémètres temps de vol utilisant des impulsions courtes (ns) sont
donc à détection directe et ne fournissent pas de mesure de vitesse instantanée, cependant à l’aide de
plusieurs mesures de distances il leur est possible d’estimer la vitesse de la cible.
O
Nous avons introduit dans ce paragraphe diverses sources d’erreurs. En général seule l’erreur aléatoire
due au rapport signal sur bruit, prépondérante, est considérée. Cependant dans le cas où l’on souhaite
effectuer des mesures avec une très grande précision, les autres erreurs sont a prendre en compte.

Partie I : Etat de l’art en télémétrie laser
14
5. PORTÉE DES TÉLÉMÈTRES
Le but principal des radars est de déterminer en premier lieu l’absence ou la présence d’une cible, puis
dans un deuxième temps d’estimer sa position et éventuellement sa vitesse : c’est également le cas des
télémètres lasers. Dans ce paragraphe nous nous intéresserons tout d’abord au premier de ces objectifs :
la détection d’une cible. En effet, comme nous le verrons plus loin, le signal reçu est perturbé par un
bruit dont l’origine provient du capteur lui-même et de son environnement. Cette perturbation
additionnée au signal peut induire une mesure erronée ou encore une non-mesure. Il convient de choisir
un seuil de détection tel que les probabilités de mesure erronée ou de non-mesure soit minimisées.
Nous verrons que la valeur de ce seuil participe à la détermination d’un caractéristique importante des
télémètres : la portée.
O
5.1 Détection des cibles
Le problème de détection est un problème de décision statistique : à partir d’une expérience (la
réception), le télémètre doit prendre une décision concernant la présence ou l’absence de cible. Pour
résoudre ce problème nous élaborons un critère de décision qui détermine l’appartenance à l’une ou
l’autre des hypothèses. L’observation considérée s’écrit :
y s b= + (5.1)
où s représente le signal utile et b le bruit2. Deux hypothèses doivent être alors envisagées :
H0 : y b= la cible n’est pas présente
H1 : y s b= + la cible est présente
Les fonctions de densité de probabilité des variables aléatoires x et b, relatives aux hypothèses décrites
ci-dessus, sont données par :
0 0( / ) ( / )bP y H P y H= (5.2)
1 1( / ) ( / )bP y H P y s H= − (5.3)
Lorsque le bruit photo électrique est prédominant, sa fonction de densité de probabilité suit une loi de
Poisson. Dans les autres cas, plus fréquents, où les différentes sources de bruit sont du même ordre de
grandeur, le théorème central limite peut être invoqué, la fonction de densité de probabilité du bruit est
alors considérée comme normale (gaussienne) :
2 En réalité les observations s et b sont fonctions du temps, il est alors nécessaire de considérer des observations multiples et les processus aléatoires associés. Cependant, afin d’alléger les calculs et les résultats étant similaires, nous considérerons des observations discrètes de variables aléatoires.

Partie I : Etat de l’art en télémétrie laser
15
2
2
1( ) exp
22b
xP x
σπ σ
= − ⋅ (5.4)
Nous introduisons le rapport de vraisemblance défini de la façon suivante [JM92] :
( )2
2
112
0 02
exp2( / )( / )
( )( / ) ( / )
exp2
b
b
y s
P y s HP y Hy
P y H P y H y
σ
σ
−−
− Λ = = = −
(5.5)
Le test utilisé afin de déterminer le seuil y0 de décision s’écrit :
sélection de l’hypothèse H1 si : 0( )yΛ > Λ (5.6)
Avec 0 0( )yΛ = Λ . Le critère de sélection pour H1, en prenant le logarithme de chacun des membres de
(4.5), s’écrit finalement :
sélection de l’hypothèse H1 si : [ ]2
0 0ln2s
ys
σ> Λ + (5.7)
Il s’agit maintenant de choisir une valeur pour Λ0. Nous disposons pour cela de plusieurs critères
définis dans les ouvrages traitants de la théorie de la détection [JM92][RNM95]. Nous allons rapidement
introduire les trois critères les plus utilisés et nous porterons notre choix sur l’un d’entre eux.
Critère du Maximum de vraisemblance
Ici, le test porte uniquement sur la comparaison des fonctions de densité de probabilité 1( / )P y H et
0( / )P y H , soit à choisir 0 1Λ = :
sélection de l’hypothèse H1 si : 1 0( / ) ( / )P y H P y H> , soit 0 2s
y > (5.8)
Critère de Bayes
Le choix optimal, du point de vue de la maximisation de la probabilité de décision correcte est, connaissant 1( )P H et 0( )P H de fixer le seuil de la façon suivante :
00
1
( )
( )
P H
P HΛ = (5.9)
En choisissant, par exemple, Λ0 = 2, nous obtenons :
sélection de l’hypothèse H1 si : [ ]2
0 ln 22s
ys
σ> + (5.10)
Comme la probabilité de H0 est deux fois supérieure à celle de H1, le critère de Bayes nécessite une
valeur de y supérieure pour la sélection de H0 par rapport au critère du maximum de vraisemblance

Partie I : Etat de l’art en télémétrie laser
16
pour lequel cette information n’est pas utilisée. Dans ce cas, le critère de Bayes donne bien
évidemment une règle de décision meilleure. Cependant et en général 1( )P H et 0( )P H ne sont pas
connues à priori, ce qui rend ce critère difficile à appliquer.
Critère de Neyman-Pearson
Les deux critères cités précédemment sont difficilement évaluables. L’approche Neyman-Pearson
quant à elle amène à une règle de décision sujette à une évaluation quantitative. En effet, jusqu'à lors
aucune contrainte n’était appliquée aux critères. Nous introduisons maintenant, la probabilité de fausse
alarme : H1 est sélectionnée alors que H0 est vraie :
0 00 0( / ) ( / )fa by y
P P y H dy P y H dy∞ ∞
= =∫ ∫ (5.11)
et la probabilité de détection :
0 01 1( / ) ( / )d by y
P P y H dy P y s H dy∞ ∞
= = −∫ ∫ (5.12)
Appliquons au critère la contrainte suivante : par exemple Pfa = 0,01, c’est à dire que le taux de fausse
alarme toléré est de 1%. Le seuil y0 est alors calculé pour :
0
20
2
1 10,01 exp 1 erf
2 22 2fa y
yyP dy
σπ σ σ∞ = = − = − ⋅ ⋅
∫ (5.13)
L’équation (4.6) qui établi la condition de seuil sur Λ(y) est transformée en terme d’observation sur y
en :
sélection de H1 si : 0y y> (5.14)
Une résolution numérique de (4.11) donne y0 = 2,33 σ. La probabilité de détection est alors donnée par :
0
20
2
1 ( ) 1exp 1 erf
2 22 2d y
s yy sP dy
σπ σ σ∞ −− = − = + ⋅ ⋅
∫ (5.15)
soit avec y0 = 2,33 σ :
11 erf 1,646
2 2d
sP
σ = + − ⋅
(5.16)
Nous remarquons que Pd dépend uniquement du rapport signal sur bruit à travers / 2s σ , et bien sûr
de la valeur de Pfa choisie qui détermine dans cet exemple le paramètre 1,646. La fonction erf(x) tend
vers 1 lorsque x tend vers l’infini, ce qui signifie que pour un rapport signal sur bruit, lequel est égal à 2 2/s σ , suffisamment important, la probabilité de détection est proche de l’unité.
Partie I : Etat de l’art en télémétrie laser
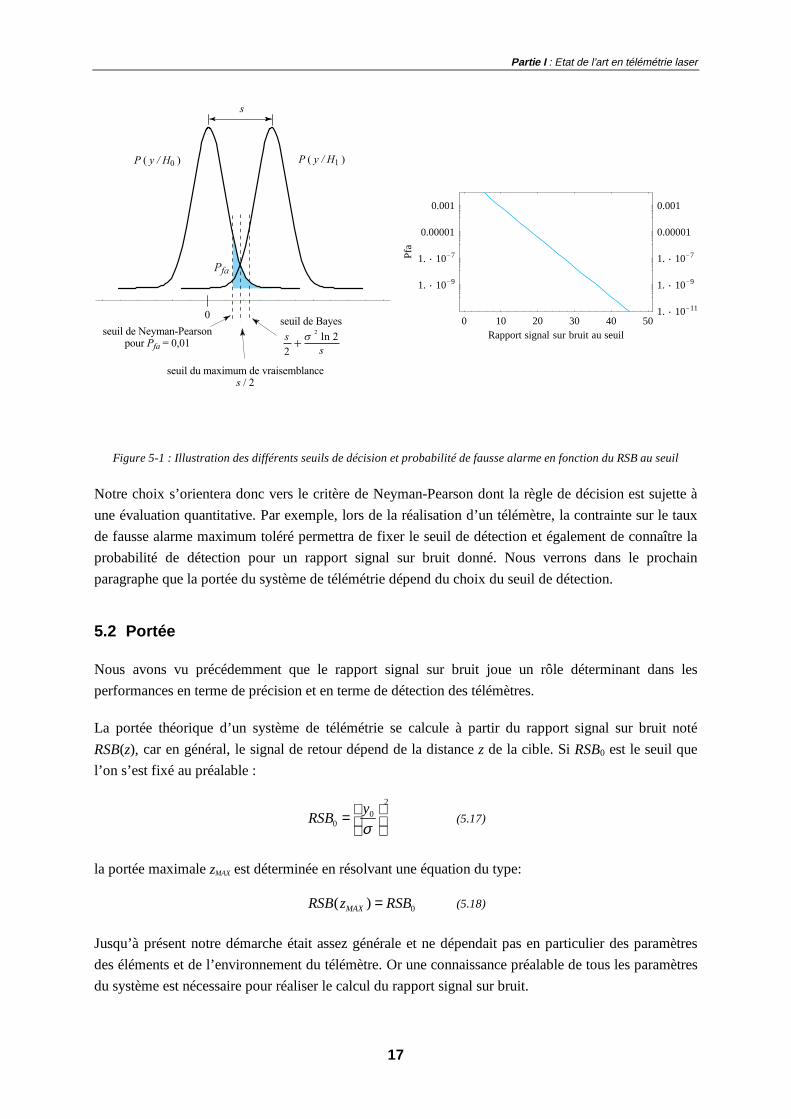
17
0
P ( y / H0 ) P ( y / H1 )
s
seuil de Neyman-Pearsonpour Pfa = 0,01
seuil du maximum de vraisemblances / 2
seuil de Bayes�
s
s2
22
+s ln
Pfa
0 10 20 30 40 50Rapport signal sur bruit au seuil
1.· 10-9
1.· 10-7
0.00001
0.001
Pfa
1.· 10-11
1.· 10-9
1.· 10-7
0.00001
0.001
Figure 5-1 : Illustration des différents seuils de décision et probabilité de fausse alarme en fonction du RSB au seuil
Notre choix s’orientera donc vers le critère de Neyman-Pearson dont la règle de décision est sujette à
une évaluation quantitative. Par exemple, lors de la réalisation d’un télémètre, la contrainte sur le taux
de fausse alarme maximum toléré permettra de fixer le seuil de détection et également de connaître la
probabilité de détection pour un rapport signal sur bruit donné. Nous verrons dans le prochain
paragraphe que la portée du système de télémétrie dépend du choix du seuil de détection.
5.2 Portée
Nous avons vu précédemment que le rapport signal sur bruit joue un rôle déterminant dans les
performances en terme de précision et en terme de détection des télémètres.
La portée théorique d’un système de télémétrie se calcule à partir du rapport signal sur bruit noté
RSB(z), car en général, le signal de retour dépend de la distance z de la cible. Si RSB0 est le seuil que
l’on s’est fixé au préalable :
2
00
yRSB
σ =
(5.17)
la portée maximale zMAX est déterminée en résolvant une équation du type:
0( )MAXRSB z RSB= (5.18)
Jusqu’à présent notre démarche était assez générale et ne dépendait pas en particulier des paramètres
des éléments et de l’environnement du télémètre. Or une connaissance préalable de tous les paramètres
du système est nécessaire pour réaliser le calcul du rapport signal sur bruit.
Partie I : Etat de l’art en télémétrie laser
18
En effet, la plupart des bruits dépendent des éléments et de l’environnement du télémètre. C’est le cas
par exemple du bruit ambiant causé par le rayonnement solaire, des fluctuations des signaux dues à la
turbulence atmosphérique et à la granularité laser, ou bien encore le bruit généré par le photodétecteur
et l’amplificateur électronique. L’évaluation du rapport signal sur bruit se fait nécessairement pour une
architecture donnée, il sera effectué dans la deuxième partie dans le cas du télémètre temps de vol.
6. SYSTEMES UTILISANT UNE DÉTECTION COHÉRENTE
L’origine des mesures télémétriques optiques remonte aux premières recherches sur la mesure de la
vitesse de la lumière. Fizeau en 1849, Foucault en 1862 et Michelson entre 1889 et 1927, mirent au
point des appareils expérimentaux afin de déterminer cette vitesse. L’interféromètre de Michelson fut
donc le premier dispositif optique, utilisant les propriétés de cohérence de lumière, visant à mesurer
une distance ou plutôt un déplacement. Aujourd’hui encore, sous une forme plus ou moins modifiée
(guides et fibres optiques, plusieurs longueurs d’onde...), il est utilisé dans le domaine de
l’instrumentation haute résolution : profilométrie, mesures de variations d’amplitude, de profondeur,
mesures de vibrations et d’états de surface. L’inconvénient majeur de cet interféromètre provient de
son inefficacité à réaliser des mesures sur des cibles non réfléchissantes.
Au début des années 60, après les premières démonstrations expérimentales de lasers, l’utilisation de
telles sources pour la réalisation de radars optiques fut naturellement envisagée. En 1963 Biernson
[GB63] présente une théorie des radars lasers à détection cohérente sur cible non-coopérative,
l’architecture de ces systèmes est donnée par la figure 1-1. L’avantage de cette technique par rapport à
l’interférométrie classique est l’utilisation d’impulsions lumineuses de forte puissance combinée à une
sensibilité élevée en détection cohérente. Nous allons nous intéresser dans ce paragraphe aux
techniques de télémétrie laser, adaptées des techniques radars, utilisant une détection cohérente.
O
6.1 Télémétrie impulsi onnelle à détection coh érente
Ces systèmes sont très largement décrits dans la littérature depuis 1963 où Biernson [GB63] présente
une théorie des radars lasers, et font encore l’objet d’études, en particulier dans le domaine des Lidars
atmosphériques. A l’origine un seul laser continu était utilisé. Une partie du faisceau servait
d’oscillateur local, l’autre partie était envoyée vers un amplificateur optique fonctionnant durant un
intervalle de temps réduit à une fréquence de récurrence donnée afin de produire les impulsions.
Cependant, la largeur des impulsions obtenues était de l’ordre de 10 µs et ne permettait pas d’obtenir
une résolution en distance satisfaisante.
Afin de réduire la durée de l’impulsion et la complexité du bloc d’émission due à l’amplificateur
optique, l’utilisation d’un laser déclenché, avec des impulsions de largeur à mi-hauteur inférieure à la
micro seconde [NJDM87], fut envisagée. Cette source laser impulsionnelle est, de plus, de forte
puissance (impulsion de plusieurs mJ voire une dizaine de mJ). Les différents lasers déclenchés utilisés
Partie I : Etat de l’art en télémétrie laser
19
dans les systèmes de télémétrie sont le laser à CO2 [FM84] [JD85] [NJDM87] et plus récemment, avec le
développement des lasers solides, le Nd :YAG et le Tm,Ho :YAG [SWH90] [SWH91]. Néanmoins, ce
laser de puissance doit être stabilisé en fréquence optique, ce qui implique en général l’utilisation d’un
deuxième laser « maître » continu possédant une spectre étroit et stable afin de le transmettre au laser
« esclave » de puissance par injection [YKP84] [TJK87] [TT93] [SB90] . Ce deuxième laser, par la même
occasion, est également utilisé comme oscillateur local. L’utilisation de coupleurs à fibre optiques
[DKJ95] permet de s’affranchir des alignements fastidieux [AES66] [SCC75] mais nécessaires dans les
montages interférométriques.
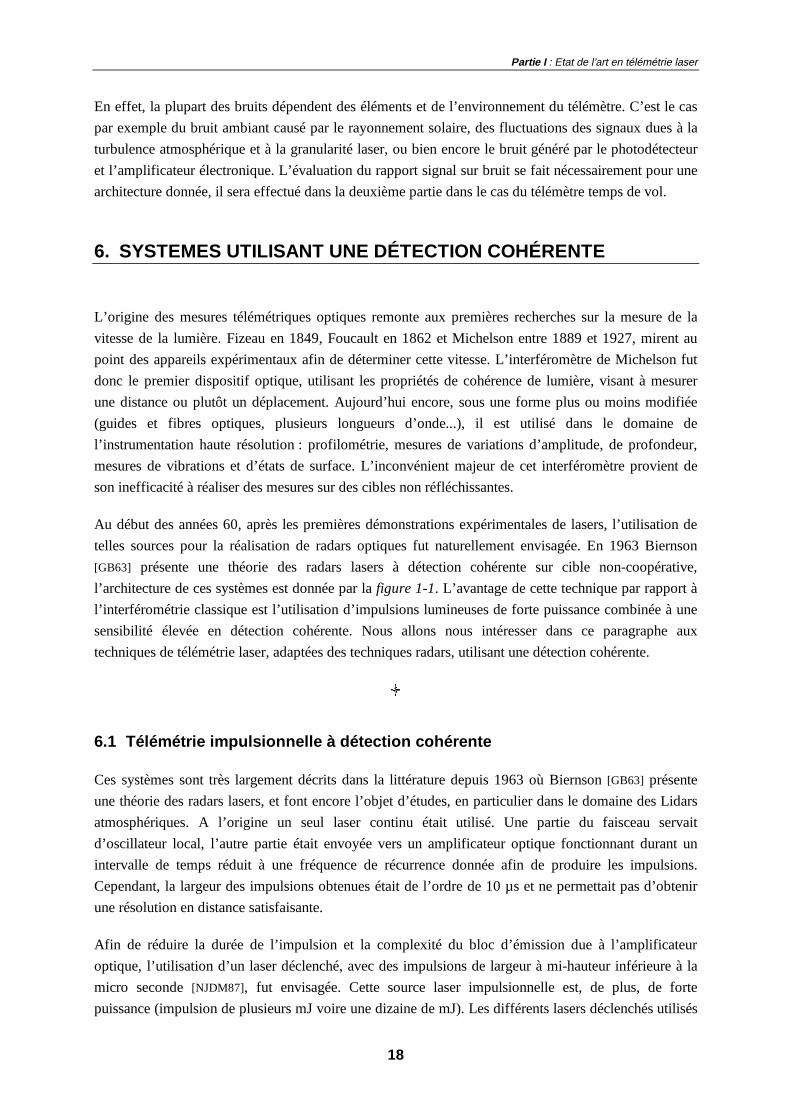
z
laser
déclenché
détecteur
BLOC DE RECEPTION
BLOC D'EMISSION
faisceau laser
lumière diffusée par la cible
cible
oscillateurloca
l
laser
continu stable
injection
Figure 6-1 : Télémètre impulsionnel à détection cohérente
Comme nous l’avons vu au paragraphe 4, il est nécessaire de faire un compromis entre la mesure de
distance et la mesure de vitesse : la résolution en distance est directement proportionnelle à la durée de
l’impulsion, tandis que la résolution en vitesse est inversement proportionnelle à cette durée.
Un moyen de s’affranchir de cette contrainte est de moduler en amplitude l’impulsion émise, cette
technique est dérivée de la « compression d’impulsion » et de la télémétrie à comparaison de phase que
nous détaillerons par la suite, elle permet d’obtenir simultanément et précisément l’information de
vitesse et de distance. Masters et al. [LTM95] utilisent un laser injecté à 2,09 µm (sécurité oculaire), une
partie du faisceau du laser « maître » est décalée en fréquence par un modulateur acousto-optique et
sert à injecter un laser « esclave » déclenché plus puissant afin de lui transmettre ses propriétés
spectrales plus fines : l’impulsion émise a une largeur de 500 ns et est décalé de 27 MHz par rapport au
laser « maître ». L’impulsion émise par le laser « esclave » est ensuite sinusoïdalement modulée par un
cristal électro-optique :
( ) ( ) cos ( )ps t a t t tω φ = ⋅ ⋅ + (6.1)
a(t) est la fonction d’amplitude, φ(t) la fonction de phase et ωp la pulsation porteuse, l’autre partie sert
d’oscillateur local pour le mélange interférentiel avec l’impulsion rétrodiffusée par une cible.
L’amélioration annoncée sur la résolution en distance, par rapport à un télémètre à comparaison de
phase, est d’un facteur 70.

Partie I : Etat de l’art en télémétrie laser
20
L’encombrement, la complexité, le coût des télémètres impulsionnels à détection cohérente limite leur
champ d’applications aux mesures atmosphériques comme la mesure de la vitesse du vent où de
l’altitude des nuages par exemple.
6.2 Télémétrie à m odulation linéaire de la fréquence optique (FMCW)
f(t)
0 2T 4T
fd
D ff1 f2
t
t
Figure 6-2 : Exemple de modulation utilisée en télémétrie FMCW
La modulation de la fréquence optique utilisée en télémétrie FMCW est décrite schématiquement sur la
figure 6-2. Un balayage de fréquence en forme de double rampe est mis en œuvre pour réaliser une
mesure de l’effet Doppler. La différence fondamentale avec la télémétrie impulsionnelle à détection
cohérente provient du fait que l’information de distance est obtenue dans le domaine fréquentiel. Le
principe de la télémétrie FMCW consiste à faire interférer le signal de réception avec une partie du
signal émis et à mesurer les battements résultants. Si l’objet est en mouvement, les fréquences de
battement obtenues par interférence de l’onde de référence et de l’onde signal, s’écrivent [AC94] :
1
2
2 2
2 2
z vf f
cTz v
f fcT
λ
λ
= ∆ ⋅ − = ∆ ⋅ +
(6.2)
La mesure des fréquences f1 et f2 permet de déterminer la distance z et la vitesse v de l’objet pour autant
que ces deux quantités ne varient pas de manière significative pendant le temps de la mesure.
L’obtention de v et z est immédiate à partir des relations (6.2) qui forment un système de deux équations
à deux inconnues. L’avantage de cette technique est l’obtention d’une résolution en distance inférieure
au mm.
Les premiers lidars utilisant un balayage de la longueur d’onde ont été réalisés avec des lasers CO2
émettant à 10,6 µm.. A cette longueur d’onde, les problèmes d’alignement et les fluctuations sont
moins critiques que dans le proche infrarouge. Cependant les systèmes à base de laser CO2 sont
généralement complexes et encombrants pour des applications nécessitant un faible coût de fabrication
ainsi que des dimensions réduites.
Partie I : Etat de l’art en télémétrie laser
21
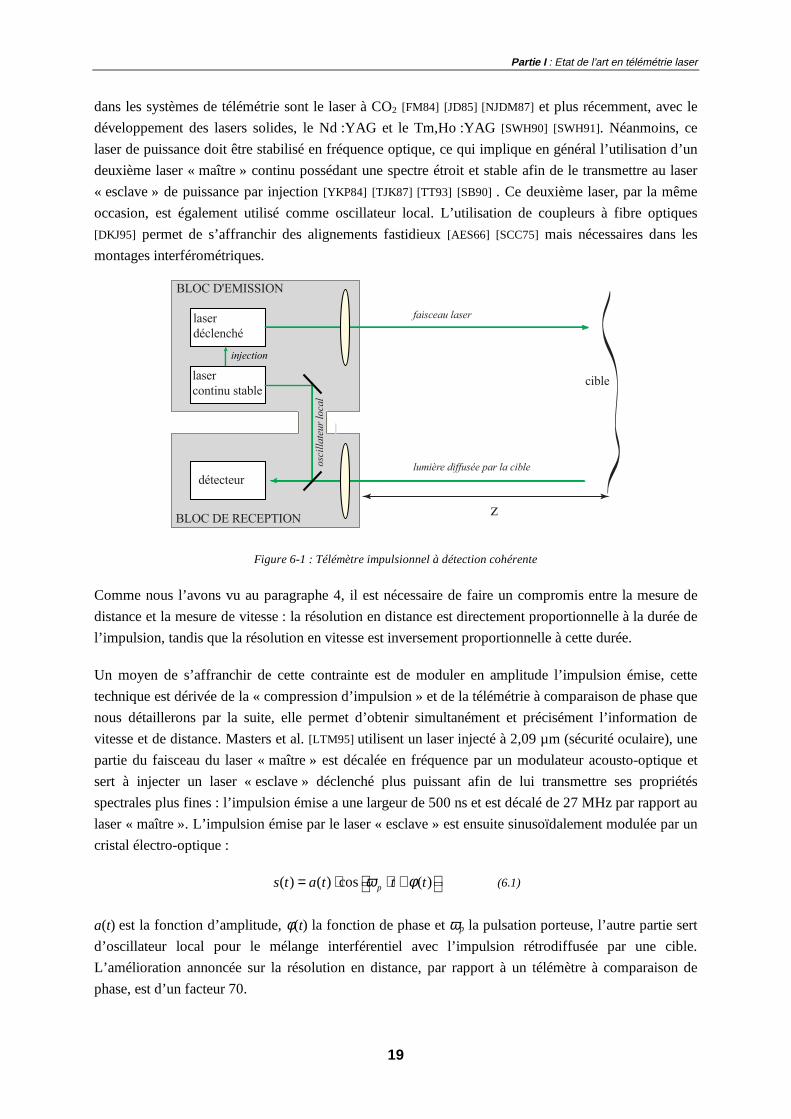
z
diode laser ou
microlaser modulé
BLOC D'EMISSION-RECEPTION
faisceau laser
lumière diffusée par la cible
cible
atténuateur variable
traitement
détecteur
Figure 6-3 : Télémètre à modulation linéaire de la fréquence optique utilisant une diode laser ou un microlaser
Des dispositifs utilisant des diodes lasers et leurs propriétés dynamiques d’accordabilité en longueur
d’onde ont été proposés pour mettre en oeuvre la technique FMCW. Afin de résoudre les problèmes
d’alignement et de cohérence très critiques dans le proche infrarouge, diverses solutions ont été
proposées. La plus originale repose sur l’utilisation du laser comme émetteur et récepteur : la figure 6-3
décrit un montage utilisant une diode laser. En superposant au courant de polarisation un courant
périodique en forme de double rampe, il est possible de moduler la fréquence de l’émission du laser.
Cependant, l’inconvénient majeur de l’utilisation d’une diode laser provient des sauts de modes et de la
dégradation de la cohérence temporelle de l’oscillation laser lorsque la cible renvoie trop de lumière
dans la cavité [NS97].
Figure 6-4 : Télémètre utilisant un microlaser balayé en fréquence développé au Léti
Le développement de lasers solides miniatures (microlasers) balayé en fréquence par la modulation
d’un cristal électro-optique placé à l’intérieur de la cavité laser [MB96] a permis de s’affranchir des
problèmes liés aux diodes laser. Le premier télémètre utilisant cette source laser (voir figure 6-4) a été
réalisé au Léti [PN97]. Des mesures de distance sur une plage allant de 1 à 10 m ont été réalisées avec
une reproductibilité de 1 mm sur une courte période d’acquisition. En effet, la légère instabilité des

Partie I : Etat de l’art en télémétrie laser
22
microlasers à long terme induit une dérive sur la mesure de l’ordre de plusieurs mm. La cadence ou
fréquence des mesures est de 10 kHz, soit une mesure toutes les 0,1 ms
7. SYSTEMES UTILISANT UNE DÉTECTION DIRECTE
Goldstein, en 1963, propose d’utiliser la particularité des lasers à produire dans un intervalle de temps
très court une impulsion lumineuse intense [BSG63] associée à une détection directe dans le but de
mesurer des distances importantes. Les premières applications pressenties consistaient à mesurer la
distance de la terre à la lune ou encore de mesure la distance à un véhicule. En 1968, Goldstein
présente le premier télémètre à détection directe utilisant un laser à semiconducteur [BSG68] avec une
portée de 200 m sur cible naturelle. L’avantage mis en avant, par rapport aux systèmes possédant une
détection cohérente, est la simplicité de mise en œuvre : en effet, les alignements sont moins critiques,
les éléments moins nombreux, les dimensions du télémètre sont réduites de telle façon qu’il peut être
« portable ». Ce sont ces raisons qui ont par la suite favorisé le développement des télémètres à
détection directe et conduit à des dispositifs commerciaux. Dans ce paragraphe, nous décrirons les
principaux systèmes utilisant ce type de détection.
O
7.1 Télémétrie par comparaison de phase
La puissance lumineuse issue de la source laser est modulée selon une loi du type :
[ ]0( ) 1 .sin(2 )mP t P m f tπ= ⋅ + ⋅ ⋅ (7.1)
P0 est la puissance moyenne, m le facteur de modulation compris entre 0 et 1 et fm la fréquence de
modulation. Cette onde est émise vers la cible située à la distance z. Une faible partie de la puissance
retrodiffusée par la cible est reçue par un détecteur avec un retard égal au temps de vol τ. La puissance
détectée est donc de la forme :
0( ) 1 .sin(2 4 )S m m
zP t P m f t f
cγ π π = + ⋅ ⋅ − ⋅ ⋅
(7.2)
Le signal électrique issu du détecteur est un signal sinusoïdal de même fréquence fm que la commande,
mais déphasé d’une quantité 4 /mf z cφ π= . Le traitement du signal permet de déterminer directement
la phase φ et donc de calculer la distance z par la relation :
( 2 )4 m
cz n
fφ π
π= + (7.3)’
La résolution en distance est directement liée à la résolution en phase ∆φ et au rapport signal sur bruit
[SMK93]. Lorsque φ dépasse 2π , il y a une ambiguïté sur la mesure de distance. Cette limitation existe
aussi en interférométrie où une mesure de distance se ramène à une mesure de phase. Pour accroître
Partie I : Etat de l’art en télémétrie laser
23
l’étendue de la mesure sans dégrader la résolution, il est fréquent d’utiliser simultanément ou
séquentiellement deux fréquences de modulation [MA93]. La fréquence la plus basse détermine la
portée du télémètre, la fréquence la plus haute détermine sa résolution. Par exemple, un télémètre
utilisant deux fréquences 5 et 50 MHz est capable d’effectuer, si le rapport signal sur bruit est suffisant
et lorsque la phase est numérisée sur 8 bits, une mesure non ambiguë sur 30 m avec une résolution de 1
cm. Popov et Yakovlev ont réalisé un télémètre fonctionnant sur cible naturelle en utilisant une diode
laser InGaAs émettant à 0,85 µm une puissance de 10 mW, la portée du système est d’environ 30 m
pour une résolution de 1 mm [VVY93] . Les systèmes actuels utilisent plusieurs fréquences de
modulation et un algorithme de recherche, aussi, il faut parfois plus d’une seconde pour obtenir une
mesure à la précision optimale.
Le problème du couplage électromagnétique entre l’émission et la réception et le problème des trajets
multiples sont les principales limitations de ces dispositifs [GA91]. Pour limiter les phénomènes de
diaphonie, diverses astuces ont été imaginées. Une première méthode consiste à alimenter de manière
discontinue une diode laser et à réaliser la mesure de phase sur diverses harmoniques du signal
photoélectrique [KS87]. Un dispositif électro-optique ayant une réponse non-linéaire par rapport au
signal de modulation a été aussi utilisé pour réaliser la mesure de phase sur une harmonique [ML91].
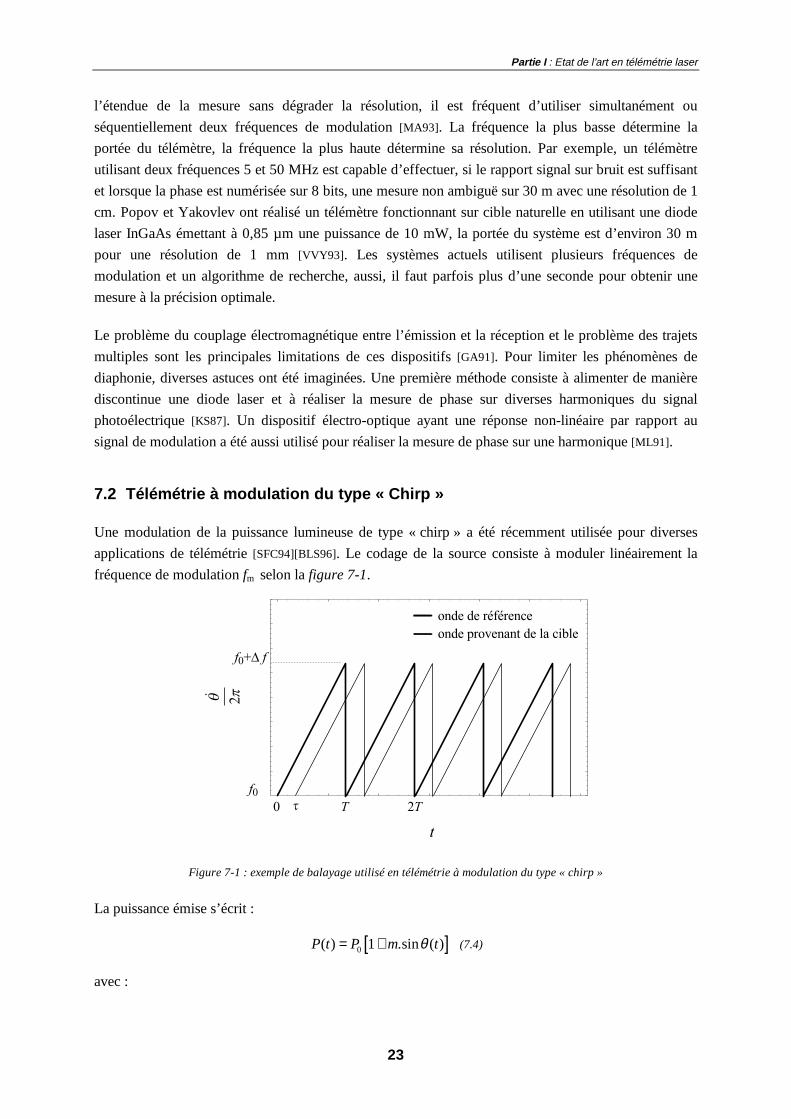
7.2 Télémétrie à m odulation du type « Chirp »
Une modulation de la puissance lumineuse de type « chirp » a été récemment utilisée pour diverses
applications de télémétrie [SFC94][BLS96]. Le codage de la source consiste à moduler linéairement la
fréquence de modulation fm selon la figure 7-1.
0 T
f0
f0+D f
t
t
2T
onde de référence
onde provenant de la cible
& q p2
Figure 7-1 : exemple de balayage utilisé en télémétrie à modulation du type « chirp »
La puissance émise s’écrit :
[ ]0( ) 1 .sin ( )P t P m tθ= + (7.4)
avec :
Partie I : Etat de l’art en télémétrie laser
24
20( ) mt t t
T
ωθ ω ∆= + pour 0 < t < T ( modulo T ) (7.5)
Le mélange d’une fraction de l’onde émise avec l’onde en provenance de la cible fournit, après un
filtrage adéquat, un signal périodique du type hétérodyne dont la fréquence est proportionnelle à la
distance. Le mélange des signaux peut être fait dans un coupleur optique ou bien de manière
électronique [SFC94][BLS96]. L’avantage de cette méthode provient de la facilité de mise en oeuvre de la
partie optique par rapport à la technique FMCW utilisant une détection cohérente. La principale
limitation provient de la complexité du traitement du signal qui doit extraire avec un fort pouvoir de
résolution en fréquence le signal de battement qui est généralement noyé dans le bruit de fond [HAL94].
Les résultats obtenus avec cette méthode sont très disparates. Les mesures les plus probantes
concernent la détection de cibles naturelles à l’aide d’un système utilisant une diode laser GaAlAs
émettant une puissance de l’ordre de 100 mW à la longueur d’onde de 817 nm, la portée est de l’ordre
de 50 m et la résolution en distance est de l’ordre de 25 cm [BLS96]. Le temps nécessaire au traitement
du signal limite de plus la cadence des mesures.
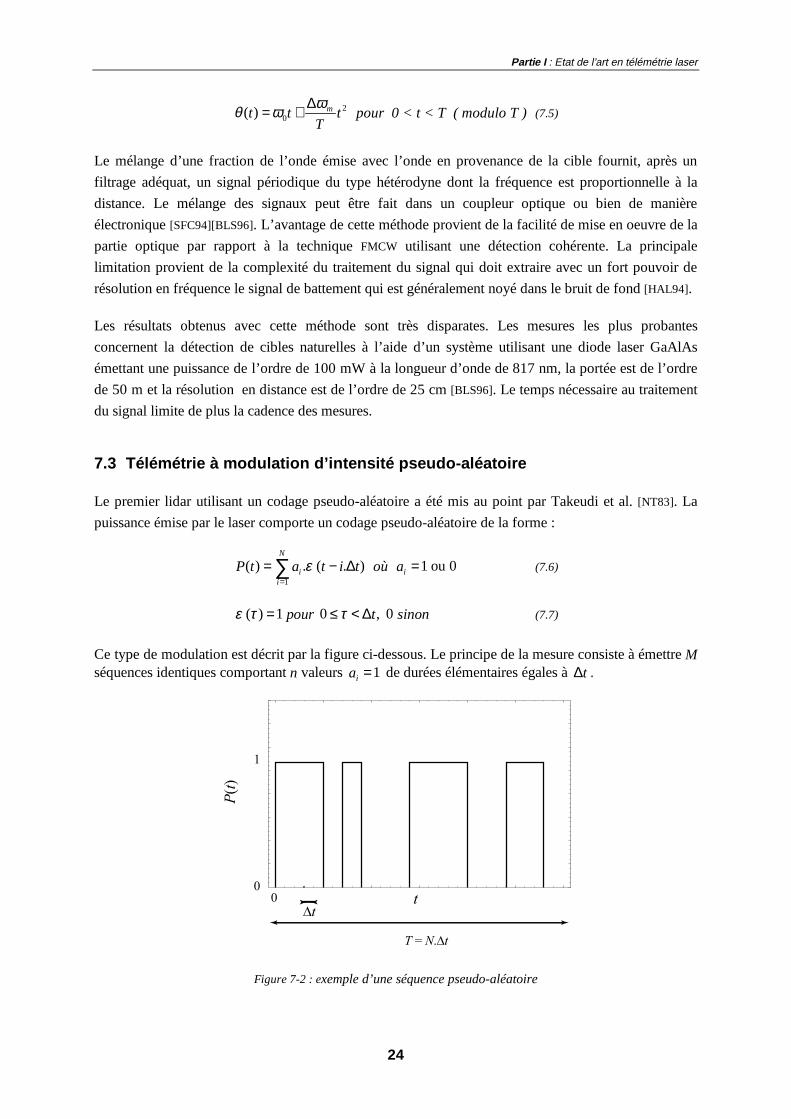
7.3 Télémétrie à m odulation d’intensité pseudo-aléatoire
Le premier lidar utilisant un codage pseudo-aléatoire a été mis au point par Takeudi et al. [NT83]. La
puissance émise par le laser comporte un codage pseudo-aléatoire de la forme :
1
( ) . ( . )N
ii
P t a t i tε=
= − ∆∑ où 1 ou 0ia = (7.6)
( ) 1 0 , 0 pour t sinonε τ τ= ≤ < ∆ (7.7)
Ce type de modulation est décrit par la figure ci-dessous. Le principe de la mesure consiste à émettre M séquences identiques comportant n valeurs 1ia = de durées élémentaires égales à t∆ .
0 t
0
1
Dt
P(t)
T = N.Dt
Figure 7-2 : exemple d’une séquence pseudo-aléatoire

Partie I : Etat de l’art en télémétrie laser
25
Chaque séquence pseudo-aléatoire a une durée égale à T. La détection consiste à corréler un signal de
référence avec l’écho en provenance de la cible. Lorsque le retard du signal de référence est égal au
temps de vol, la corrélation présente un maximum. Cette technique permet d’utiliser de très faibles
puissances d’émission. Une diode laser émettant à 780 nm permet de mesurer des profils d’aérosols
dans l’atmosphère sur plusieurs centaines de mètres ainsi que la distance de nuages situés à plusieurs
kilomètres [NT86], le système fonctionnant en sécurité oculaire. Ces performances exceptionnelles
expliquent l’intérêt grandissant des techniques de codage aléatoire et de corrélation pour la mesure de
profils d’aérosols dans l’atmosphère [CN90]. Cette technique présente également un intérêt dans le
domaine de la mesure de distance aux satellites [DMN88]. Le principal inconvénient de la technique
provient de la faible résolution spatiale des mesures, de l’ordre de 9 m pour les dispositifs existants
[NT86]. La cadence des mesures est de l’ordre de grandeur de celle obtenue en télémétrie par
comparaison de phase.
7.4 Télémétrie temps de vol
La télémétrie impulsionnelle à détection directe ou télémétrie temps de vol consiste à émettre en
direction de la cible une impulsion de lumière intense très courte, puis à chronométrer le trajet aller-
retour de cette impulsion. Sur la figure 7-3, P(t) représente la puissance émise vers la cible et Ps(t) la
puissance de l’écho.
t
P(t)
t1 t2 t3
seuil
seuil
Figure 7-3 : Exemple de chronogramme en télémétrie temps de vol
La mesure du temps de vol est réalisée par un compteur rapide déclenché par l’émission et stoppé à la
réception de l’impulsion. La précision en distance dépend de la durée de l’impulsion et du rapport
signal sur bruit comme l’indique la relation (4.12) et également de la résolution du compteur. Nous
verrons plus tard que la hauteur du seuil de détection joue également un rôle dans le calcul de la
résolution. En effet, la détermination de l’instant d’arrivée de l’impulsion est réalisée par un
comparateur dont le seuil est situé juste au-dessus du bruit (voir paragraphe 5). L’appréciation de
l’instant d’arrivée dépend donc du niveau de l’impulsion de retour. Une solution simple pour résoudre
Partie I : Etat de l’art en télémétrie laser
26
ce problème est d’intégrer plusieurs mesures sur un même point mais nécessairement au détriment de la
cadence des mesures
En télémétrie temps de vol la détection du signal de retour est réalisée de façon incohérente et le
système de détection est basé sur l’utilisation de photodiodes à effet d’avalanche. Yakovlev propose un
système de détection utilisant une photodiode à effet d’avalanche ayant un gain de 103 à 104 et
conférant au système un seuil de sensibilité de 1,7 10 -9 W.Hz-1/2. La capacité de jonction inférieure à
1,9 pF permet d’obtenir une bande passante compatible avec la durée des impulsions de l’ordre de 1 ns
[VVY93] . Le même auteur présente un télémètre temps de vol qui utilise la photodiode à avalanche
décrite précédemment et un circuit d’interpolation qui détermine la fraction d’unité de comptage entre
deux coups du compteur [VVY93] . Il indique que des distances de 200 m sont mesurées avec une
précision de 5 à 10 mm selon le rapport signal sur bruit et ceci sur cible diffusante. Dans [RA86] et
[AJM94], les auteurs mettent en oeuvre un convertisseur temps-amplitude pour la mesure du temps de
vol. En moyennant , ils aboutissent à une précision de l’ordre de 1 mm pour une gamme de mesure de
0 à 2 m sur cible non coopérative et de l’ordre de 0,1 mm pour une gamme de distance de 2,3 m à
4,4 m. Määttä et al. montrent dans [KM93] que les télémètres temps de vol restent performant dans des
conditions difficiles : ils utilisent un dispositif à diode laser pour contrôler le profils de surfaces
métalliques à haute température (1400°C). On pourra consulter les publications des sociétés Optech
[SS86], Wild [RB90], Litton Laser Systems [JGD86] et Riegl [AU99] qui commercialisent des télémètres
temps de vol à base de diode laser et fonctionnant sur cible diffusante.
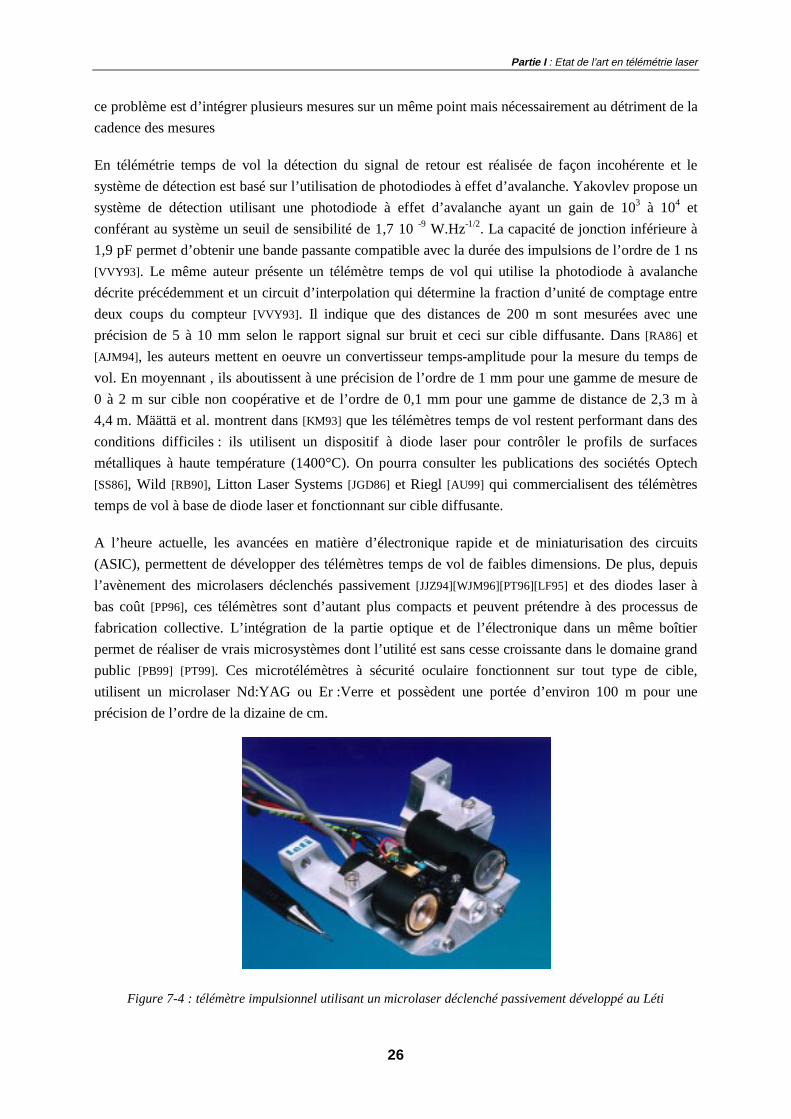
A l’heure actuelle, les avancées en matière d’électronique rapide et de miniaturisation des circuits
(ASIC), permettent de développer des télémètres temps de vol de faibles dimensions. De plus, depuis
l’avènement des microlasers déclenchés passivement [JJZ94][WJM96][PT96][LF95] et des diodes laser à
bas coût [PP96], ces télémètres sont d’autant plus compacts et peuvent prétendre à des processus de
fabrication collective. L’intégration de la partie optique et de l’électronique dans un même boîtier
permet de réaliser de vrais microsystèmes dont l’utilité est sans cesse croissante dans le domaine grand
public [PB99] [PT99]. Ces microtélémètres à sécurité oculaire fonctionnent sur tout type de cible,
utilisent un microlaser Nd:YAG ou Er :Verre et possèdent une portée d’environ 100 m pour une
précision de l’ordre de la dizaine de cm.
Figure 7-4 : télémètre impulsionnel utilisant un microlaser déclenché passivement développé au Léti
Partie I : Etat de l’art en télémétrie laser
27
8. TRIANGULATION
La télémétrie laser à triangulation n’est pas, à priori une méthode de mesure telle que nous l’avions
définie précédemment. En effet, elle n’utilise pas un paramètre de modulation de la source laser mais
des informations géométriques. Cependant, de nombreux capteurs utilisant cette méthode sont
commercialisés [RF93], c’est pourquoi nous l’introduisons dans cette partie.
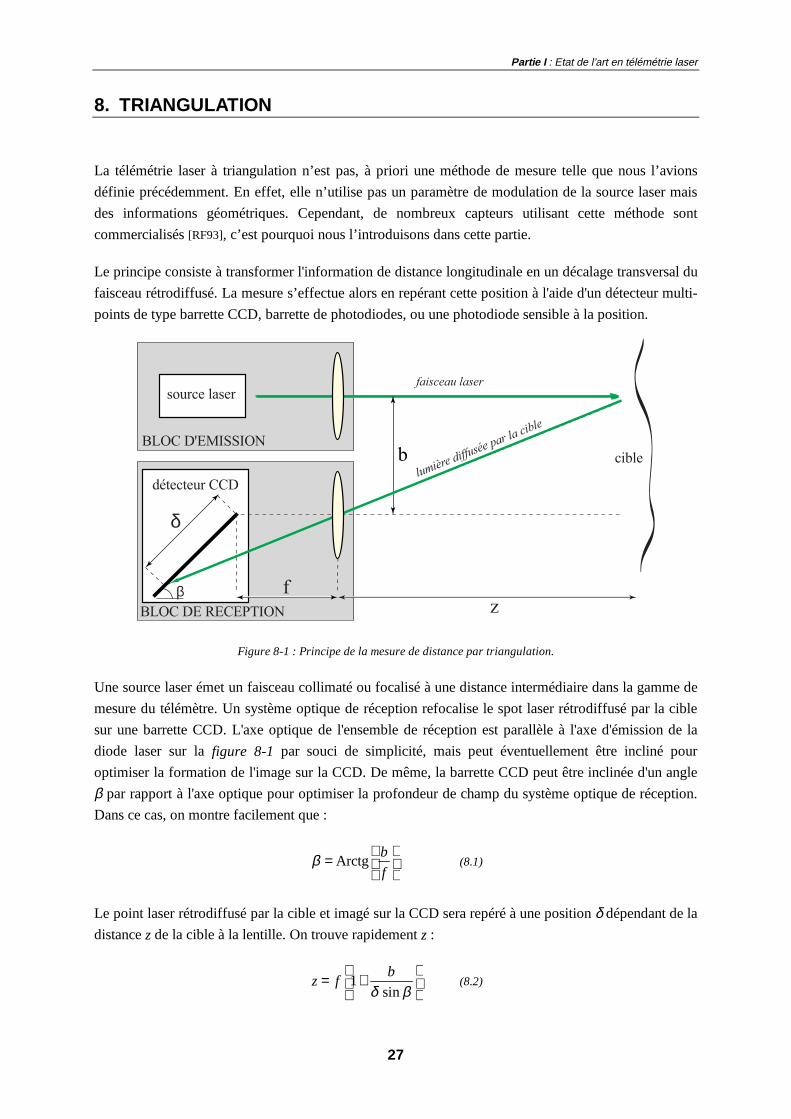
Le principe consiste à transformer l'information de distance longitudinale en un décalage transversal du
faisceau rétrodiffusé. La mesure s’effectue alors en repérant cette position à l'aide d'un détecteur multi-
points de type barrette CCD, barrette de photodiodes, ou une photodiode sensible à la position.
z
source laser
détecteur CCD
BLOC DE RECEPTION
BLOC D'EMISSION
faisceau laser
lumière
diffusé
e par la
cible
cible
f
b
δ
β
Figure 8-1 : Principe de la mesure de distance par triangulation.
Une source laser émet un faisceau collimaté ou focalisé à une distance intermédiaire dans la gamme de
mesure du télémètre. Un système optique de réception refocalise le spot laser rétrodiffusé par la cible
sur une barrette CCD. L'axe optique de l'ensemble de réception est parallèle à l'axe d'émission de la
diode laser sur la figure 8-1 par souci de simplicité, mais peut éventuellement être incliné pour
optimiser la formation de l'image sur la CCD. De même, la barrette CCD peut être inclinée d'un angle
β par rapport à l'axe optique pour optimiser la profondeur de champ du système optique de réception.
Dans ce cas, on montre facilement que :
Arctgb
fβ
=
(8.1)
Le point laser rétrodiffusé par la cible et imagé sur la CCD sera repéré à une position δ dépendant de la
distance z de la cible à la lentille. On trouve rapidement z :
1sin
bz f
δ β
= +
(8.2)
Partie I : Etat de l’art en télémétrie laser
28
La relation n'est pas linéaire et la précision n'est donc pas constante avec la distance. En première
approximation, c'est à dire sans tenir compte de la défocalisation ni des aberrations (coma et distorsion)
il vient :
2sinz
f b δ
β δ∆⋅∆ = (8.3)
Ce type de capteur est donc plus précis pour les distances les plus courtes. On trouve à l'heure actuelle
des barrettes CCD à 4096 pixels, voire 8192 pixels, ce qui permet d'obtenir une bonne résolution, qu'il
est de plus possible d'améliorer en utilisant un traitement du signal approprié. Par ailleurs, ces
détecteurs peuvent accumuler le signal sur des durées variables, ce qui permet d'augmenter le rapport
signal sur bruit et détecter de très faibles flux, donc d'obtenir des portées intéressantes avec des sources
lumineuses peu puissantes. La difficulté principale réside dans l'optique de réception qui doit
généralement être assez ouverte pour récupérer suffisamment de flux lumineux tout en étant corrigée
des aberrations sur l'axe et hors axe sur un grand domaine de fonctionnement. Ceci limite généralement
la gamme de distance de mesure. Par ailleurs, ces capteurs sont encombrants, la distance entre
l'émetteur et le récepteur devant être suffisante pour obtenir un décalage transversal exploitable.
Le principe de détection est simple et surtout adaptable à la gamme de distances à mesurer. On trouve
dans la littérature et dans le commerce des télémètres à triangulation travaillant à quelques centimètres
avec des précision pouvant descendre jusqu'à 10µm, mais aussi des systèmes permettant de mesurer
des distances jusqu'à plusieurs dizaines de mètres avec des précision inférieures au centimètre.
En conclusion, la triangulation est souvent appliquée au contrôle industriel de dimensions où plus
généralement à la mesure précise d'une distance autour d'une valeur donnée, là où la profondeur de
champ n'est pas un paramètre critique.
Partie I : Etat de l’art en télémétrie laser
29
9. CONCLUSION
Cette première partie nous a permis de mieux cerner les techniques de télémétrie laser et
montre combien l’étendue du sujet est importante. D’une manière générale, nous avons constaté que la
télémétrie à détection cohérente, c’est à dire la télémétrie qui utilise les principes tirés de
l’interférométrie, bien qu’ayant une sensibilité supérieure, est de conception beaucoup plus complexe
que la télémétrie à détection directe. C’est la simplicité de mise en oeuvre et la fiabilité des systèmes à
détection directe qui a permis leur commercialisation.
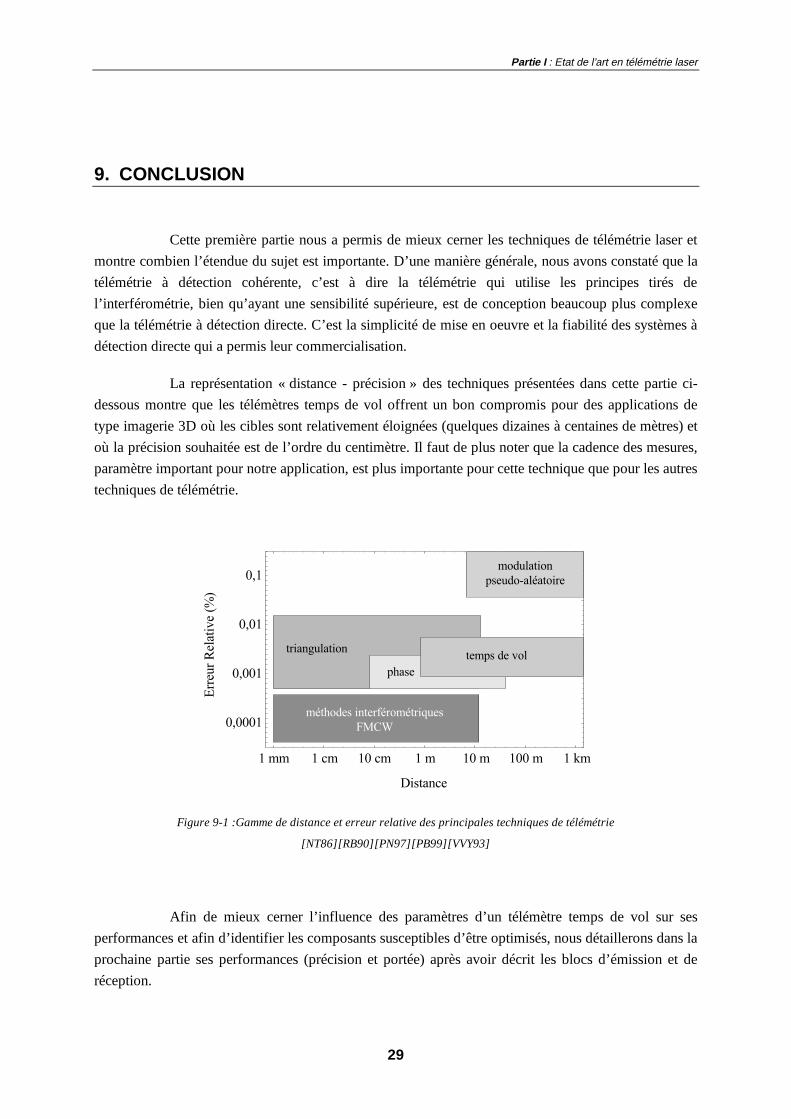
La représentation « distance - précision » des techniques présentées dans cette partie ci-
dessous montre que les télémètres temps de vol offrent un bon compromis pour des applications de
type imagerie 3D où les cibles sont relativement éloignées (quelques dizaines à centaines de mètres) et
où la précision souhaitée est de l’ordre du centimètre. Il faut de plus noter que la cadence des mesures,
paramètre important pour notre application, est plus importante pour cette technique que pour les autres
techniques de télémétrie.
1 mm 1 cm 10 cm 1 m 10 m 100 m 1 km
0,0001
0,001
0,01
0,1
triangulation
méthodes interférométriques
FMCW
phase
temps de vol
modulation
pseudo-aléatoire
Distance
ErreurRelative(%
)
Figure 9-1 :Gamme de distance et erreur relative des principales techniques de télémétrie
[NT86][RB90][PN97][PB99][VVY93]
Afin de mieux cerner l’influence des paramètres d’un télémètre temps de vol sur ses
performances et afin d’identifier les composants susceptibles d’être optimisés, nous détaillerons dans la
prochaine partie ses performances (précision et portée) après avoir décrit les blocs d’émission et de
réception.